Well-Posedness of Feedback Loop: Consider t he … of Feedback Loop: Consider t he following...
26
2010 Spring ME854 - GGZ Page 1 Internal Stability Internal Stability Internal Stability Well-Posedness of Feedback Loop: system feedback following he Consider t + + K P + + r - u d i u p d y n ( ) . realizable physically not is system feedback the Hence, proper. not are ) ( to ) ( and ) ( ) ( ) ( signals external the from function transfer that the Note ) ( 3 1 ) ( ) ( ) ( 3 2 ) ( However, functions. nsfer proper tra both be 1 ) ( , 2 1 ) ( Let s u s d s d s n s r s d s s d s n s r s s u s K s s s P i i - - - + - - + = = + - - =
Transcript of Well-Posedness of Feedback Loop: Consider t he … of Feedback Loop: Consider t he following...

2010 Spring ME854 - GGZ Page 1Internal Stability
Internal StabilityInternal StabilityWell-Posedness of Feedback Loop:
systemfeedback following heConsider t
++ K P +
+
r -
u
di
up
dy
n
( )
.realizable physicallynot is systemfeedback theHence, proper.not are )( to)(
and )()()( signals external thefromfunction transfer that theNote
)(3
1)()()(
3
2)(
However, functions.nsfer proper traboth be
1)( ,2
1)(
Let
susd
sdsnsr
sds
sdsnsrs
su
sKs
ssP
i
i
−−
−+−−
+=
=+
−−=

2010 Spring ME854 - GGZ Page 2Internal Stability
Internal StabilityInternal StabilityWell-Posedness of Feedback Loop:
proper. and defined- wellare
matrices transfer loop-closed all if posed- wellbe tosaid is systemfeedback A
Definition 5.1
+
+K̂
P
2e 2w
1e1w
.
and as
signalsinput regroup and and
as loopfeedback theinto signalinput
external theregroup and :ˆLet
2 1
21
−=
ee
ww
KK
Lemma 5.1
.invertible is
)()(ˆ
ifonly and if posed- wellis above systemfeedback The
∞∞− PKI
Figure 5.2
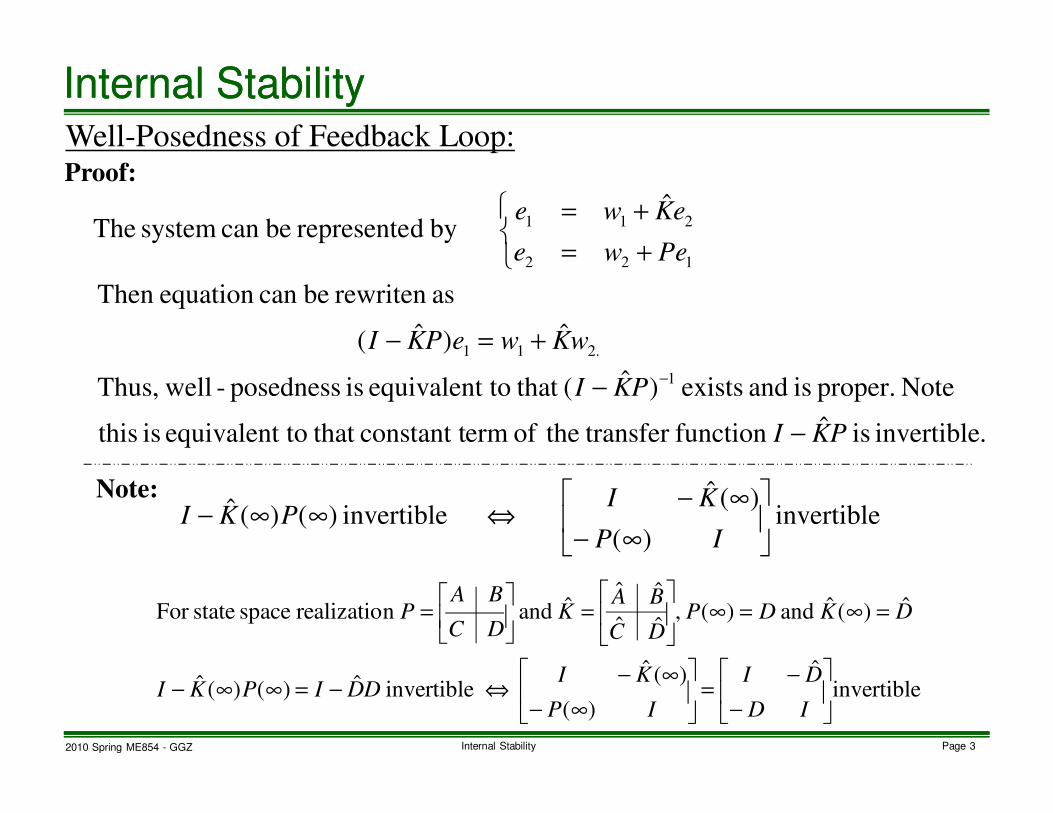
2010 Spring ME854 - GGZ Page 3Internal Stability
Internal StabilityInternal StabilityWell-Posedness of Feedback Loop:
+=
+=
122
211ˆ
by drepresente be can system ThePewe
eKwe
Proof:
Note:invertible
)(
)(ˆ invertible )()(ˆ
∞−
∞−⇔∞∞−
IP
KIPKI
.invertible is ˆ function transfer theof ermconstant t that toequivalent is this
Note proper. is and exists )ˆ( that toequivalent is posedness- wellThus,
ˆ)ˆ(
as rewriten be can equation Then
1
.211
PKI
PKI
wKwePKI
−
−
+=−
−
invertibleˆ
)(
)(ˆ invertible ˆ )()(ˆ
ˆ)(ˆ and )( ,ˆˆ
ˆˆˆ and nrealizatio space stateFor
−
−=
∞−
∞−⇔−=∞∞−
=∞=∞
=
=
ID
DI
IP
KIDDIPKI
DKDPDC
BAK
DC
BAP
2010 Spring ME854 - GGZ Page 4Internal Stability
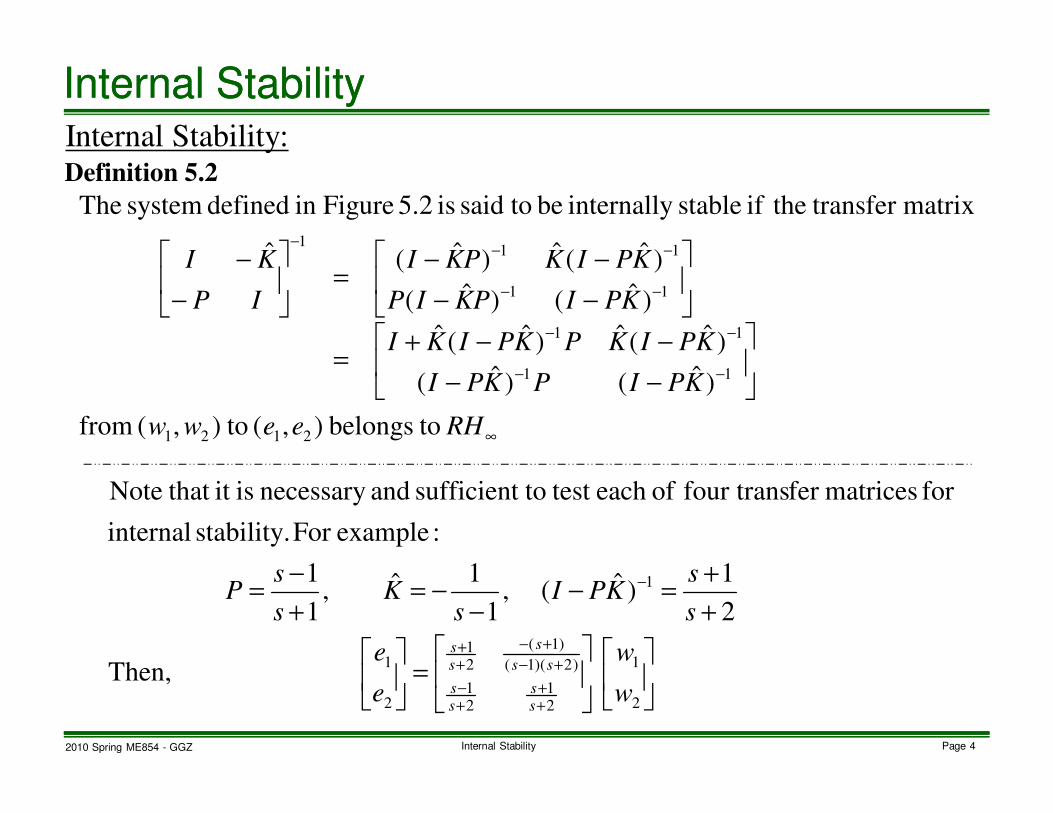
Internal StabilityInternal StabilityInternal Stability:
∞
−−
−−
−−
−−−
−−
−−+=
−−
−−=
−
−
RHeeww
KPIPKPI
KPIKPKPIKI
KPIPKIP
KPIKPKI
IP
KI
tobelongs ),( to),( from
)ˆ()ˆ(
)ˆ(ˆ)ˆ(ˆ
)ˆ()ˆ(
)ˆ(ˆ)ˆ(ˆ
matrix transfer theif stable internally be tosaid is 5.2 Figurein defined system The
2121
11
11
11
111
Definition 5.2
=
+
+=−
−−=
+
−=
++
+−
+−
+−
++
−
2
1
21
21
)2)(1(
)1(
21
2
1
1
Then,
2
1)ˆ( ,
1
1ˆ ,1
1
:exampleFor stability. internal
for matricesfer four trans ofeach test tosufficient andnecessary isit that Note
w
w
e
e
s
sKPI
sK
s
sP
ss
ss
ss
s
ss

2010 Spring ME854 - GGZ Page 5Internal Stability
Internal StabilityInternal StabilityInternal Stability:
bounded. are
locations)any (at signals injected that theprovided bounded system ain signals allthat
guaranteesIt system.feedback practical afor t requiremen basic a isstability Internal
Remark 5.1
.)ˆ( and posed- wellisit if
only and if stable internally is 5.2 Figurein system Then the .ˆ Suppose
1
∞
−
∞
∈−
∈
RHPKIP
RHK
Corollary 5.2
Proof:
.)ˆ( and posed- well ˆ
1
1
∞−
∞
−
∈−∈
−
−⇒ RHPKIPRH
IP
KI֏
∞−−
∞−−
−−
−−−
∈−=−∈−+=−
−−
−−=
−
−⇒⇐
RHKPKIPPKPIRHKPKPIIPKI
KPIPKIP
KPIKPKI
IP
KI
ˆ,)ˆ()ˆ( since ˆ)ˆ()ˆ(
invertible )ˆ()ˆ(
)ˆ(ˆ)ˆ(
ˆ posed- well
1111
11
111

2010 Spring ME854 - GGZ Page 6Internal Stability
Internal StabilityInternal StabilityInternal Stability:
plane. halfright
closed thein zeros no has ))(ˆ)(det( ly,equivalent or, ,)ˆ( if
only and if stable internally is 5.2 Figurein system theThen .ˆ, Suppose
1sKsPIRHKPI
RHKP
−∈−
∈
∞−
∞
Corollary 5.4
stable. is ))(ˆ)(( ii)
ly);respective ,)(ˆ and )( of poles
rhpopen are and ( )(ˆ)( of poles rhpopen ofnumber thei)
and posed- wellisit ifonly and if stable internally is system The
1−−
+=
sKsPI
sKsP
nnnnsKsP kpkp
Corollary 5.3
.)ˆ(ˆ and posed- wellisit if
only and if stable internally is 5.2 Figurein system Then the . Suppose
1
∞−
∞
∈−
∈
RHKPIK
RHP
Theorem 5.5:
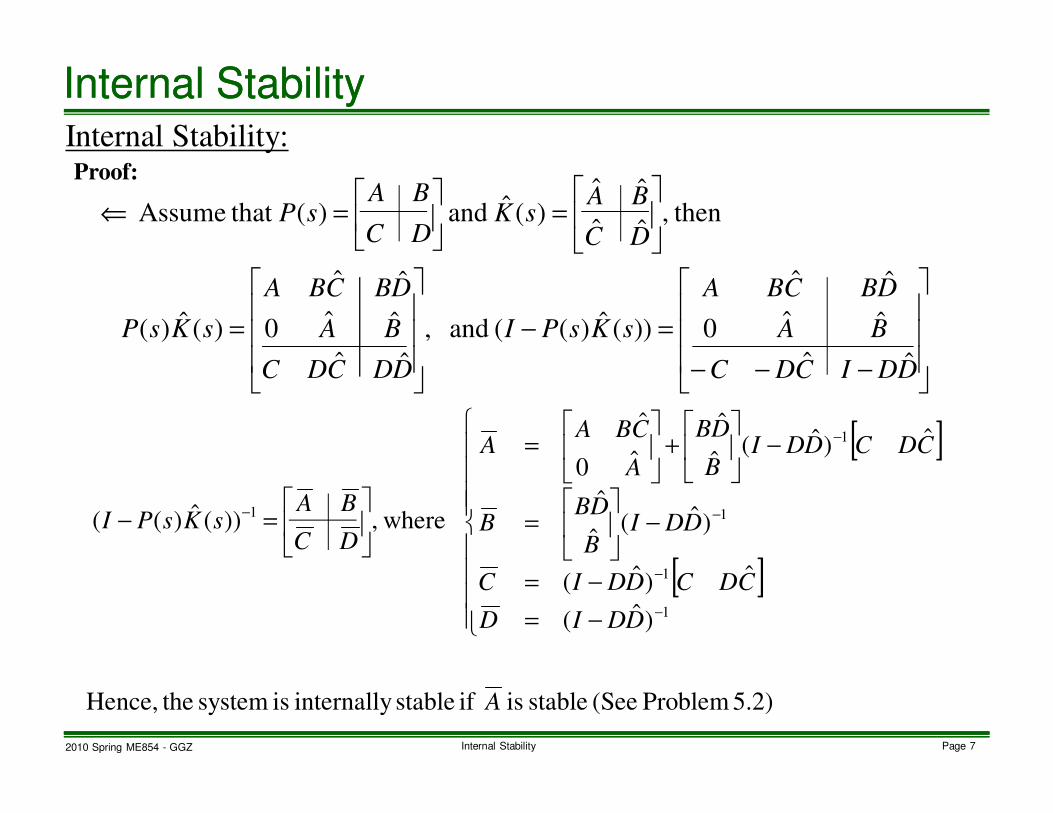
2010 Spring ME854 - GGZ Page 7Internal Stability
Internal StabilityInternal StabilityInternal Stability:
[ ]
[ ]
5.2) Problem (See stable is if stable internally is system theHence,
)ˆ(
ˆ)ˆ(
)ˆ(ˆ
ˆ
ˆ)ˆ(ˆ
ˆ
ˆ0
ˆ
where, ))(ˆ)((
1
1
1
1
1
A
DDID
CDCDDIC
DDIB
DBB
CDCDDIB
DB
A
CBAA
DC
BAsKsPI
−=
−=
−
=
−
+
=
=−
−
−
−
−
−
Proof:
−−−
=−
=
=
=⇐
DDICDC
BA
DBCBA
sKsPI
DDCDC
BA
DBCBA
sKsP
DC
BAsK
DC
BAsP
ˆˆ
ˆˆ0
ˆˆ
))(ˆ)(( and ,
ˆˆ
ˆˆ0
ˆˆ
)(ˆ)(
then,ˆˆ
ˆˆ)(ˆ and )( that Assume
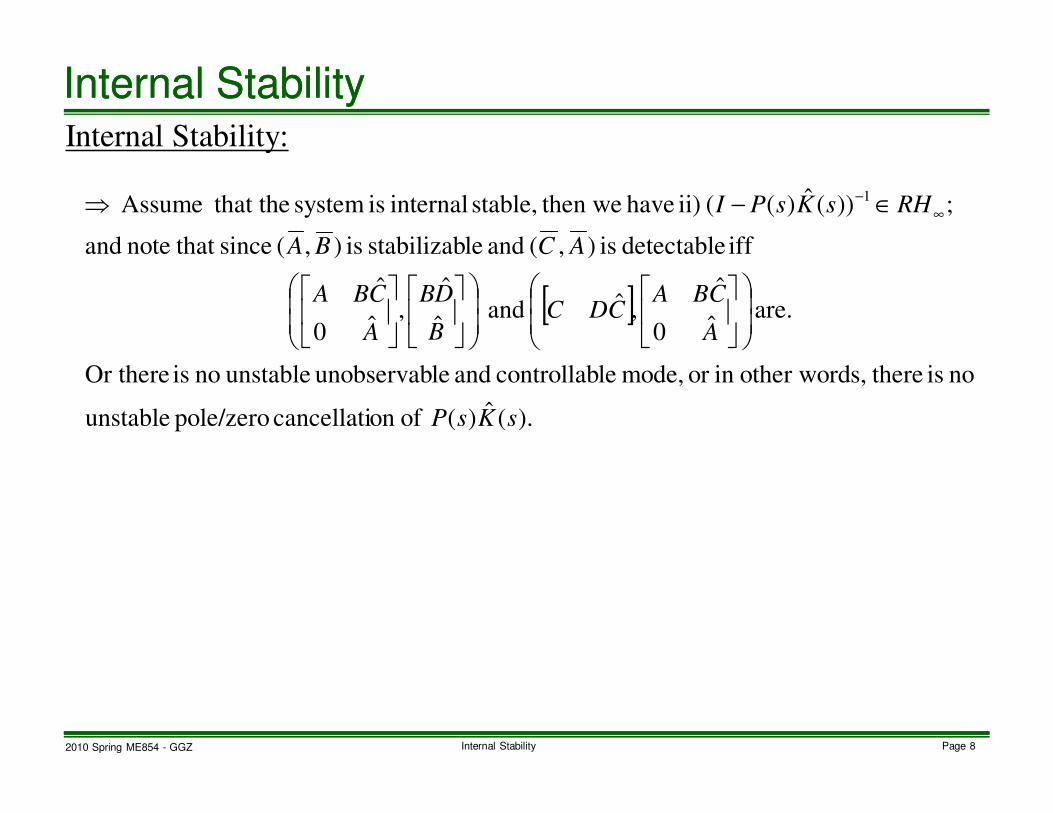
2010 Spring ME854 - GGZ Page 8Internal Stability
Internal StabilityInternal StabilityInternal Stability:
[ ]
).(ˆ)( ofon cancellati pole/zero unstable
no is theres,other wordin or mode, lecontrollab and leunobservab unstable no is Or there
are. ˆ0
ˆ,ˆ and
ˆ
ˆ,
ˆ0
ˆ
iff detectable is ),( and lestabilizab is ),( since that note and
;))(ˆ)(( ii) have then westable, internal is system that theAssume 1
sKsP
A
CBACDC
B
DB
A
CBA
ACBA
RHsKsPI
∈−⇒ ∞−

2010 Spring ME854 - GGZ Page 9Internal Stability
Internal StabilityInternal StabilityInternal Stability:
2
2
2
2
1
)1(
)2()ˆdet(
where
2
10
)1()2(
)1(
2
1
)ˆdet(
1
20
1
1
1
2
)ˆ( ,
1
20
1
1
1
2
)ˆ(
and
1
10
1
1
1
1
)(ˆ)( then ,
10
11
1
)(ˆ ,
1
10
01
1
)(
:matrices transfer 22 be )(ˆ and )(Let
+
+=−
+
+−+
+
+
+
=−
+
+−
−
+
+
=−
+
+−+
+
=−
+
−−
−
+
−
=
−
+
−=
+
−=
×
−
s
sKPI
s
s
ss
s
s
s
KPI
s
sss
s
KPI
s
sss
s
KPI
s
sssKsPs
s
sK
s
ssP
sKsPAn example:
)(ˆ)(for on cancellati pole/zero no is therecase, In this
stable internal RHP closedat zeros havenot does )ˆdet( :Note
sKsP
KPI ≠−

2010 Spring ME854 - GGZ Page 10Internal Stability
Internal StabilityInternal StabilityCoprime Factorization over RH∞:
identity).(Bezout 1)()()()(such that )( and (s)
spolynomial exists thereifonly and if coprime are )( and )( spolynomial Two
=+ smsysnsxsyx
smsn
zeros).common no
is therely,equivalent(or 1 isdivisor common greatest their if coprime be tosaid
are ts,coefficien real example,for with,),( and )( spolynomial woConsider t snsm
1)()()()(
such that )( and (s) exists thereif
over coprime be tosaid are in )( and )(function transfer two,Similarily
=+
∈ ∞
∞∞
smsysnsx
RHsyx
RHRHsnsm
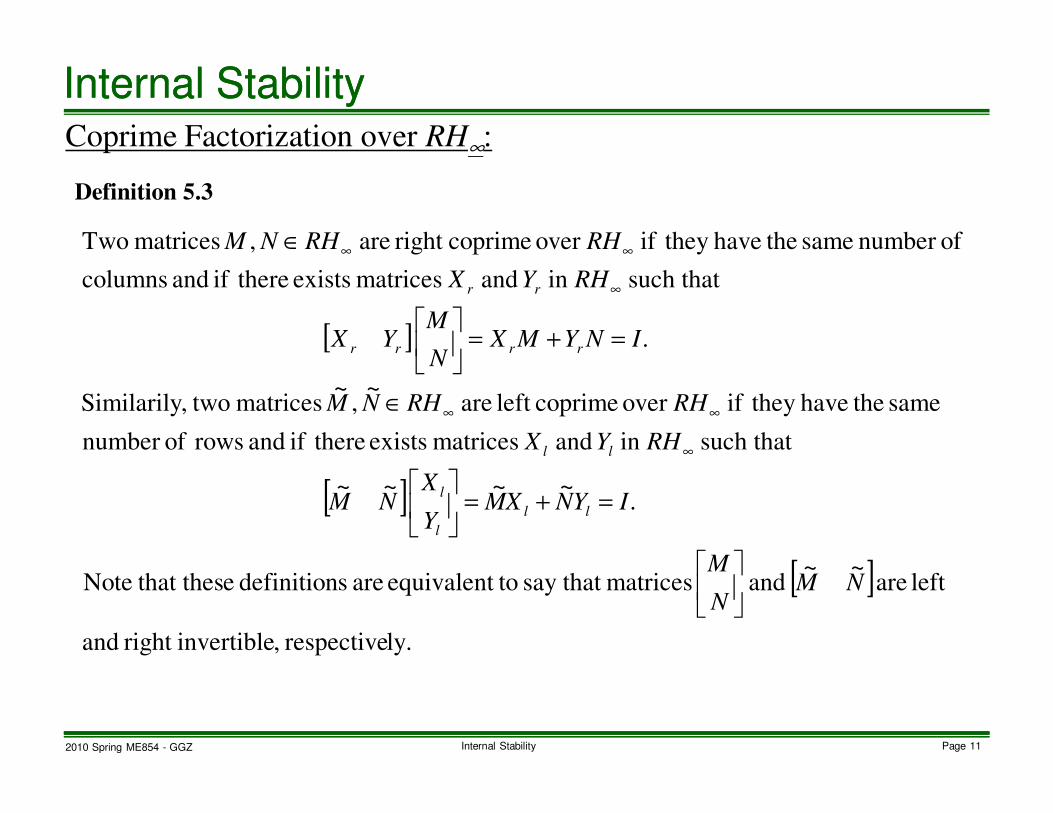
2010 Spring ME854 - GGZ Page 11Internal Stability
Internal StabilityInternal Stability
Definition 5.3
[ ]
[ ]
[ ]
ly.respective ,invertibleright and
left are ~~
and matricessay that toequivalent are sdefinition e that thesNote
.~~
~~
such that in and matrices exists thereif and rows ofnumber
same thehave they if over coprimeleft are ~
,~
matrices two,Similarily
.
such that in and matrices exists thereif and columns
ofnumber same thehave they if over coprimeright are , matrices Two
NMN
M
IYNXMY
XNM
RHYX
RHRHNM
INYMXN
MYX
RHYX
RHRHNM
ll
l
l
ll
rrrr
rr
=+=
∈
=+=
∈
∞
∞∞
∞
∞∞
Coprime Factorization over RH∞:

2010 Spring ME854 - GGZ Page 12Internal Stability
Internal StabilityInternal Stability
Right and left coprime factorizations
. ~~
such that and
,, and ,~~
ion factorizat coprimeleft a and ion factorizat coprime
right a exists thereifion factorizat coprime double have tosaid is )()(matrix A
.over coprimeleft are ~
and ~
where,~~
ion factorizat a is of (lcf)ion factorizat coprimeleft A ,Similarily
.over coprimeright are and where,
ionfactorizat a is of (rcf)ion factorizat coprimeright A matrix. realproper a be )(Let
11
1
1
IXN
YM
MN
YX
RHYX
YXNMPNMP
sRsP
RHMN
NMPP
RHMNNMP
PsP
l
lrr
ll
rr
P
=
−
−
∈
==
∈
=
=
∞
−−
∞
−
∞
−
Coprime Factorization over RH∞:

2010 Spring ME854 - GGZ Page 13Internal Stability
Internal StabilityInternal Stability
Theorem 5.6
satisfied. is
(5.7) equation re,fiurthermo and, ly,respective lcf, and rcf are ~~
Then
0
)(
~~
and
0
define and stable, both are
and that such be and Let n.realizatio detectable and lestabilizaba is
)(
andmatrix rational realproper a is )( Suppose
11 NMNMP
IDC
IF
LLDBLCA
MN
YX
IDDFC
IF
LBBFA
XN
YM
LCA
BFALF
DC
BAsP
sP
rr
l
l
−− ==
−
+−+
=
−
+
−+
=
−
+
+
=
Coprime Factorization over RH∞:

2010 Spring ME854 - GGZ Page 14Internal Stability
Internal StabilityInternal Stability
Proof:
[ ] [ ]LBI
IAsIII
C
FBAsIC
BFAsI
BFAsILCBFBFAsILCAsIAsI
ICC
IFF
LBBFA
LBLCBFLCA
DDCDC
BA
DBCBA
GGXN
YM
MN
YX
IDDFC
IF
LBBFA
XN
YMsG
IDC
IF
LLDBLCA
MN
YXsG
sGsGsG
l
lrr
l
lrr
−
−−
=−
−−
−−−−−−−−=−
−+
−+−+
=
==
−
−
+
−+
=
−=
−
+−+
=
−=
=
−−
−
−−−−
11
1
111
1
21211
22
21211
21
21
21
)()(
thatNote Also
)(0
))(()()()(
thatNote
0
0
00~~
Then,
0 )(,0
)(
~~)(
let ),()()( connection system serial Recall
Coprime Factorization over RH∞:

2010 Spring ME854 - GGZ Page 15Internal Stability
Internal StabilityInternal Stability
Proof:
[ ] [ ]
{ }{ }
1 1 1
1
1
1 1 1
1 1
Since
( ) ( ) ( )( )( )
( )
( ) ( )( ) ( )
( ) ( ) ( ) ( ) ( )
0
Therefore,
I sI A LC sI A LC BF LC sI A BFI I sI A I I
I sI A BF
sI A LC I BF LC sI A BF sI A BF
sI A LC sI A BF BF LC sI A LC sI A BF
− − −−
−
− − −
− −
− − − − − − − − − − − =
− −
= − − − − − − − + − −
= − − − − − − − + − − − −
=
[ ] [ ]1
0
( )lr r
l
M YX Y F II I sI A B L I I
N XN M C I
−− −
= − − + = − ɶ ɶ
���������
Coprime Factorization over RH∞:
Remark 5.2
.~
and ,~
,0 ,
takecan we thenstable, is if that Note
IMMPNNYYIXX
P
lrlr ========
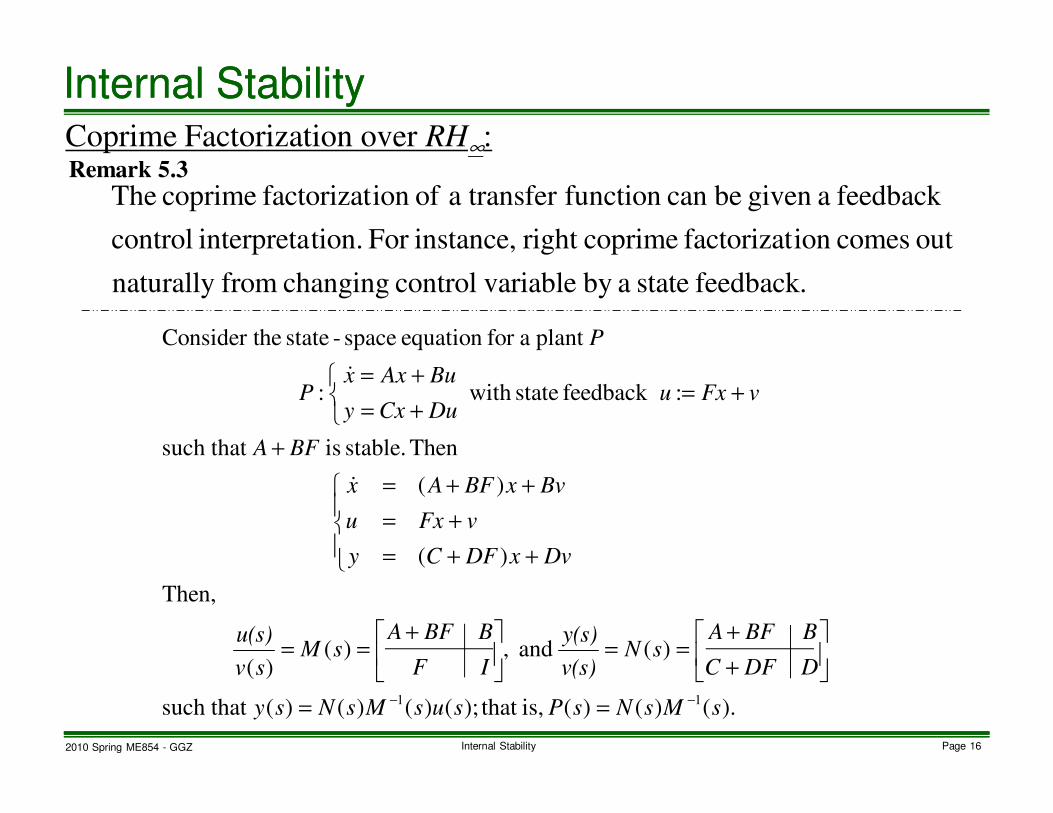
2010 Spring ME854 - GGZ Page 16Internal Stability
Internal StabilityInternal Stability
Remark 5.3
feedback. statea by variablecontrol changing fromnaturally
out comes ionfactorizat coprimeright instance, For tion.interpreta control
feedback a given be can function a transfer of ionfactorizat coprime The
Coprime Factorization over RH∞:
).()()( is,that );()()()( that such
)( and ,)()(
Then,
)(
)(
Then stable. is that such
:feedback state with:
plant a for equation space-state heConsider t
11sMsNsPsusMsNsy
DDFC
BBFAsN
v(s)
y(s)
IF
BBFAsM
sv
u(s)
DvxDFCy
vFxu
BvxBFAx
BFA
vFxuDuCxy
BuAxxP
P
−− ==
+
+==
+==
++=
+=
++=
+
+=
+=
+=
ɺ
ɺ

2010 Spring ME854 - GGZ Page 17Internal Stability
Internal StabilityInternal Stability
Lemma 5.7
)(~
)(~
)()()(
)(~
)(~
)()()(
)( and )( of slcf' and srcf' theRecall
11
11
sUsVsVsUsK
sNsMsMsNsP
sKsP
−−
−−
==
==
Coprime Factorization over RH∞:
. in invertible is ~~
)
in invertible is ~~
)
in invertible is ~~
~~
)
in invertible is ii)
stable. internally is systemfeedback The i)
:equivalent are conditions following The 5.2. Figin described ystem heConsider t
∞
∞
∞
∞
−
−
−
−
RHNUMVv
RHUNVMiv
RHMN
UViii
RHVN
UM
s
2010 Spring ME854 - GGZ Page 18Internal Stability
Internal StabilityInternal Stability
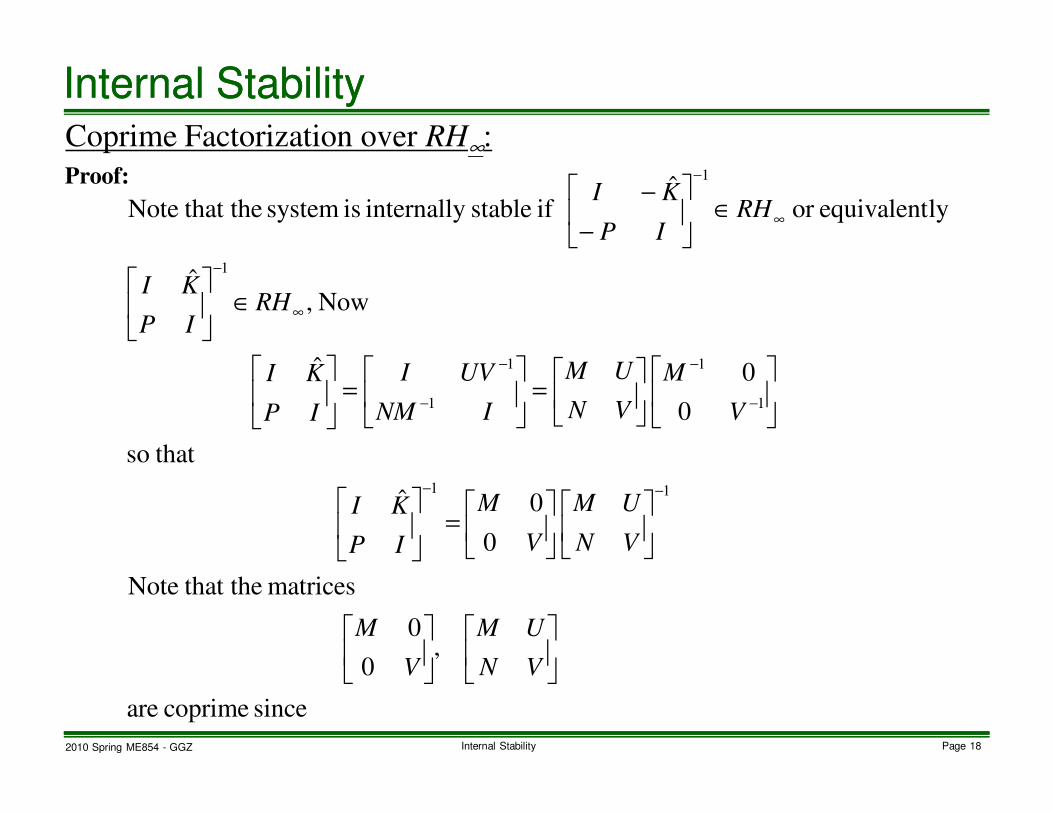
Proof:
Coprime Factorization over RH∞:
since coprime are
,0
0
matrices that theNote
0
0
ˆ
thatso
0
0
ˆ
Now ,ˆ
lyequivalentor ˆ
if stable internally is system that theNote
11
1
1
1
1
1
1
=
=
=
∈
∈
−
−
−−
−
−
−
−
∞
−
∞
−
VN
UM
V
M
VN
UM
V
M
IP
KI
V
M
VN
UM
INM
UVI
IP
KI
RHIP
KI
RHIP
KI

2010 Spring ME854 - GGZ Page 19Internal Stability
Internal StabilityInternal StabilityCoprime Factorization over RH∞:
1 1
and are coprime, there exist matrices , , , s.t.
and
and
0 0
0 0 0
0
P P K K
P P K K
P P P
K K K
NM UV X Y X Y RH
X M Y N I X V Y U I
M U
Y X Y N V I
X X Y M
V
− −
∞∈
+ = + =
− = −
0and , . This proves the equivalence of 1 and 2. Note
0
that 1 and 3 can be proved in a similar way.
P P P
K K K
I
Y X YRH
X X Y∞
− ∈ −
2010 Spring ME854 - GGZ Page 20Internal Stability
Internal StabilityInternal StabilityCoprime Factorization over RH∞:
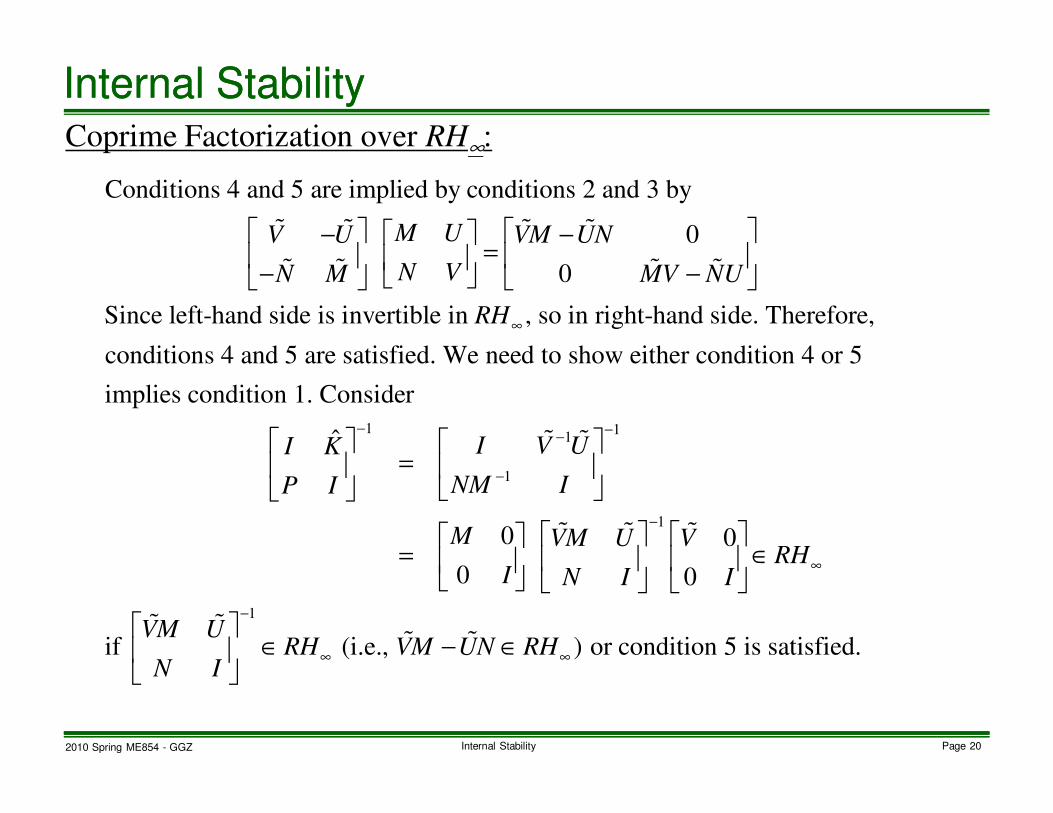
Conditions 4 and 5 are implied by conditions 2 and 3 by
0
0
Since left-hand side is invertible in , so in right-hand side. Therefor
M UV U VM UN
N VN M MV NU
RH∞
− − =
− −
ɶ ɶ ɶ ɶ
ɶ ɶ ɶ ɶ
1 11
1
1
e,
conditions 4 and 5 are satisfied. We need to show either condition 4 or 5
implies condition 1. Consider
ˆ
0 0
0 0
I V UI K
NM IP I
M VM U V
I N I I
− −−
−
−
=
=
ɶ ɶ
ɶ ɶ ɶ
1
if (i.e., ) or condition 5 is satisfied.
RH
VM URH VM UN RH
N I
∞
−
∞ ∞
∈
∈ − ∈
ɶ ɶɶ ɶ
2010 Spring ME854 - GGZ Page 21Internal Stability
Internal StabilityInternal Stability
Corollary 5.8
Coprime Factorization over RH∞:
−
+−+
=
−
−
+
−+
=
++
=
−
−
∈
==
==
∞
−−
∞
−−
IDC
IF
LLCBLCA
MN
UV
IDFC
IF
LBBFA
VN
UM
LCABFALF
I
I
VN
UM
MN
UV
RHVUVU
UVVUK
RH
NMNMPP
0
)(
~~
~~
and
0
0
by given be can matrices for these nrealizatio space state ofset particular
a Then stable. are and that such be and let e,Furthermor
0
0 ~~
~~
thatsuch ~
,~
,, with
~~ˆ
controllera exists thereThen .over lcf and rcf ingcorrespond
thebe ~~
andmatrix rational realproper a be Let
00
0
0
0
000
0000
0
1
0
1
000
11
2010 Spring ME854 - GGZ Page 22Internal Stability
Internal StabilityInternal Stability
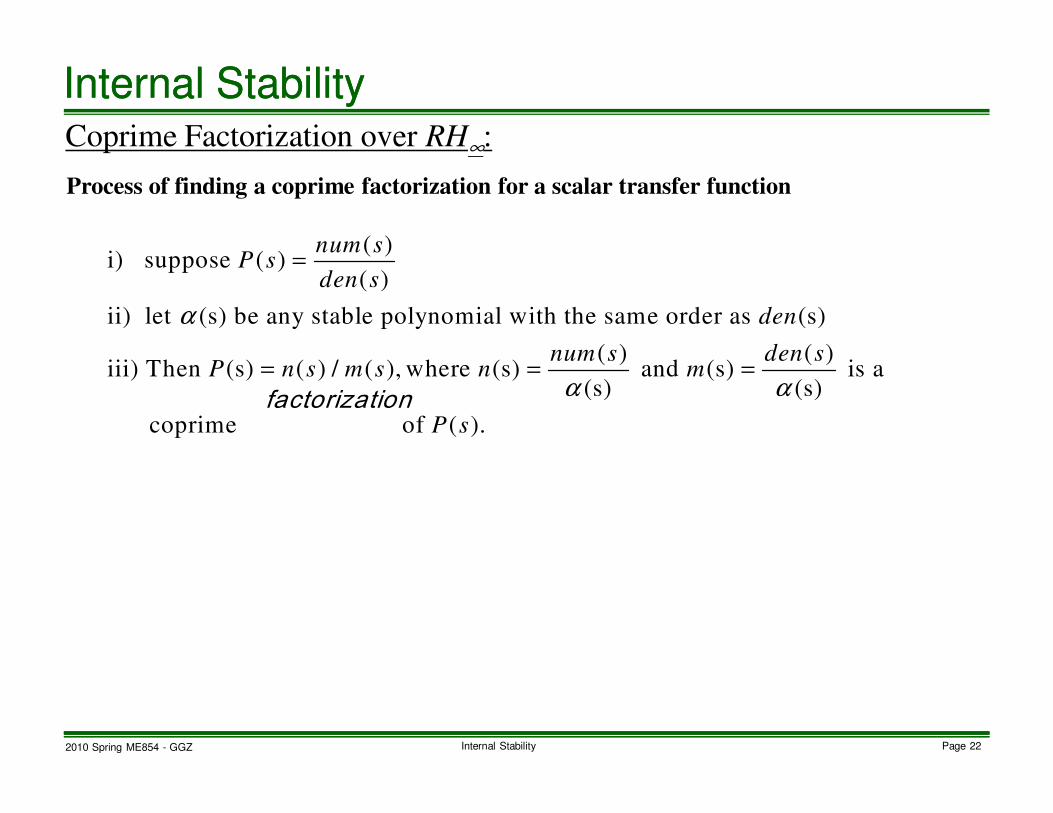
Process of finding a coprime factorization for a scalar transfer function
Coprime Factorization over RH∞:
( )i) suppose ( )
( )
ii) let (s) be any stable polynomial with the same order as (s)
( ) ( )iii) Then (s) ( ) / ( ), where (s) and (s) is a
(s) (s)
coprime of
num sP s
den s
den
num s den sP n s m s n m
α
α α
=
= = =
factorization ( ).P s

2010 Spring ME854 - GGZ Page 23Internal Stability
Internal StabilityInternal Stability
Scalar Example:
Coprime Factorization over RH∞:
2Let ( ) and select (s) ( 1)( 3). Then
( 3)
( ) 2 ( ) where ( ) and ( )
( ) ( 1)( 3) ( 1)
is a coprime factorization of ( ). To find ( ) and ( ) such that
sP s s s
s s
n s s sP s n s m s
m s s s s
P s x s y s
α−
= = + ++
−= = =
+ + +
( ) ( ) ( ) ( ) 1.
1ˆ ˆConsider a stabilization controller for : , Then ( ) / ( ), where10
ˆ( ) ( ) and ( ) 1 is a coprime factorization and
( 11.71)( ( ) ( ) ( ) ( )
x s n s y s m s
sP K K u s v s
s
u s K s v s
s sm s v s n s u s
+ =
−= =
+
= =
+ +− =
2.21)( .077): ( )
( 1)( 3)( 10)
Then,
( 1)( 1)( 3) ( ) ( ) / ( )
( 11.71)( 2.21)( .077)
( 1)( 3)( 10) ( ) ( ) / ( )
( 11.71)( 2.21)( .077)
ss
s s s
s s sx s u s s
s s s
s s sy s v s s
s s s
β
β
β
+=
+ + +
− + += − =
+ + +
+ + += =
+ + +

2010 Spring ME854 - GGZ Page 24Internal Stability
Internal StabilityInternal StabilityCoprime Factorization over RH∞:Systematic process of finding a coprime factorization
i) Let ( ) be a stabilizable and detectable realization of ( )
ii) Find a stabilization state feedback gain ( stable) using either pole
assignment or LQR design
iii) Find a stable o
A,B,C,D P s
F A BF+
1
bserver gain ( stable) using either pole assignment
or Kalman filter design
iv) Let
( )
0 & 0
0
where
L A LC
A BF B L A LC B LC LM U V U
F I F IN V N M
C DF I C D I
P NM−
+
+ − + − + − = = − + −
=
ɶ ɶ
ɶ ɶ
1 and
and
M N
VM UN I MV NU I
−=
− = − =
ɶ ɶ
ɶ ɶ ɶ ɶ
2010 Spring ME854 - GGZ Page 25Internal Stability
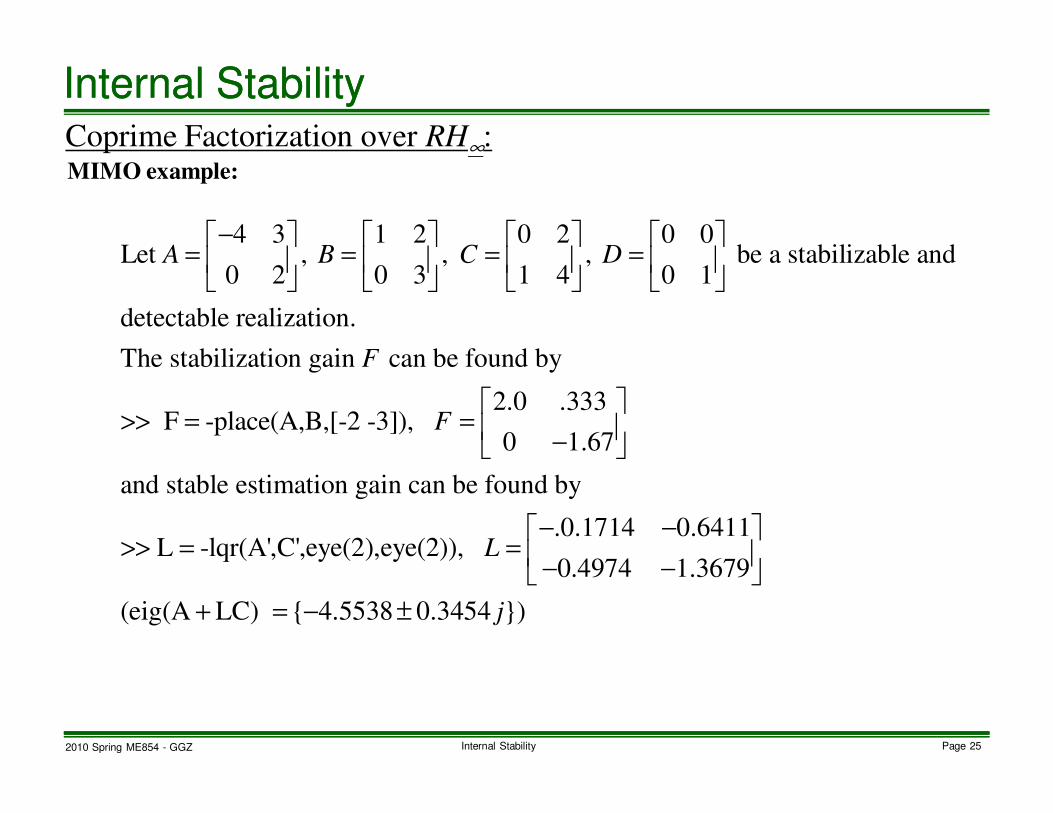
Internal StabilityInternal StabilityCoprime Factorization over RH∞:MIMO example:
4 3 1 2 0 2 0 0Let , , , be a stabilizable and
0 2 0 3 1 4 0 1
detectable realization.
The stabilization gain can be found by
2.0 .333 F -place(A,B,[-2 -3]),
0 1.67
and sta
A B C D
F
F
− = = = =
>> = = −
ble estimation gain can be found by
.0.1714 0.6411L -lqr(A',C',eye(2),eye(2)),
0.4974 1.3679
(eig(A LC) { 4.5538 0.3454 })
L
j
− − >> = = − −
+ = − ±

2010 Spring ME854 - GGZ Page 26Internal Stability
Internal StabilityInternal StabilityCoprime Factorization over RH∞:
−
+−+
=
−
−
+
−+
=
IDC
IF
LLCBLCA
MN
UV
IDFC
IF
LBBFA
VN
UM0
)(
~~
~~
&
0
0
Then
2
22 2
2
2 22
2 2
2 2
6 127 12 5 14
s 5 6s 5 6 s 5 6
3 9 204
s 5 6 s 5 6s 5 6
1.07 3.07 2.47 6.96
s 5 6 s 5 6
.707 1.41 2.18 4.37
s 5 6 s 5
0where , ,
0
ss s s
ss s
s ss
s ss
s s
s s
s s
s
M N
U
++ + +
+ ++ + + +
+ +−
+ + + ++ +
+ +
+ + + +
− − − −
+ + +
= =
=
2
2 2
2
2 2
5.85 7.70 2.62 5.24
s 5 6 s 5 6
1.45 3.37 9.07 15.2
6 s 5 6 s 5 6
,
s s s
s s
s s s
s s s
V
+ + +
+ + + +
+ + ++ + + + +
=
2
2 22 2
2
2 2
2.74 13.68 6.93 29.78.85 20.18 2.97 13.7
s 9.11 20.86 s 9.11 20.86s 9.11 20.86 s 9.11 20.86
5.11 25.82.28 11.4 3.33 3.89
s 9.11 20.86 s 9.11 20.86
and ,
s ss s s
s ss s
ss s s
s s
V N
− − − −+ + +
+ + + ++ + + +
− −− − + −
+ + + +
= =
ɶ ɶ2
2 2
2
2 2
2 2
8 6.67 42.9
s 9.11 20.86 s 9.11 20.86
0.509 2.31 1.738 7.805 8.113 1
s 9.11 20.86 s 9.11 20.86
0.829 3.46 2.28 9.12
s 9.11 20.86 s 9.11 20.86
,
,
s s
s s
s s s s
s s
s s
s s
U M
− −
+ + + +
+ + + ++ + + +
− − − −
+ + + +
= =
ɶ ɶ 2 2
2
2 2
6.7 2.74 10.94
s 9.11 20.86 s 9.11 20.86
2.16 9.11 2.995 4.02
s 9.11 20.86 s 9.11 20.86
s
s s
s s s
s s
− −
+ + + +
− − + −
+ + + +