Vibration Monitoring in a Turbomachine- Pipeline Systemfhegedus/VibrationMonitoring/Ali...
69
Budapest University of Technology and Economics (BME) Faculty of Mechanical Engineering (GPK) Department of Hydrodynamic Systems Ali Parhikzar B.Sc. Thesis Vibration Monitoring in a Turbomachine- Pipeline System Supervision: Dr. Hegedűs Ferenc Budapest, 2015
Transcript of Vibration Monitoring in a Turbomachine- Pipeline Systemfhegedus/VibrationMonitoring/Ali...

Budapest University of Technology and Economics (BME)
Faculty of Mechanical Engineering (GPK)
Department of Hydrodynamic Systems
Ali Parhikzar
B.Sc. Thesis
Vibration Monitoring in a Turbomachine-
Pipeline System
Supervision: Dr. Hegedűs Ferenc
Budapest, 2015

Department of Hydrodynamic Systems
Page | 2

Department of Hydrodynamic Systems
Page | 3
Assignment page

Department of Hydrodynamic Systems
Page | 4
DECLARATION BY CANDIDATE
I hereby declare that the thesis submitted for the B.Sc. degree at Budapest University
of Technology and Economics (BME), is my own original work and has not
previously been submitted to any other institution of higher education.
I may have discussed the Thesis with others and used advice and suggestions from
others in writing it, but the paper is my own original work and is neither copied from
another source without proper acknowledgement, nor written for me by another
person, in whole or in part.
Budapest, December 11th, 2015
……………………………….
(Signature)
Copyright© Budapest University of Technology and Economics (BME) 2015

Department of Hydrodynamic Systems
Page | 5
DEDICATION
I take pleasure in dedicating this thesis to my uncle, Mr. Alireza Parhizkar, who has
been a constant source of support and encouragement during the challenges of
graduate school and life and who gave me this chance to peruse my education by his
financial support. Thank you.
“Education is what remains after one has forgotten
What one has learned in school.”
(Albert Einstein)

Department of Hydrodynamic Systems
Page | 6
TABLE OF CONTENTS
1.0 INTRUDUCTION 8
2.0 VIBRATION 11
2.1 VIBRATION IN CENTRIFUGAL PUPMS 11
2.2 SOURCE OF VIBRATION IN CENTRIFUGAL PUPMS 12
2.2.1 Mechanical Causes of vibration 12
2.2.2 Hydraulic Causes of Vibrations 12
2.2.3 Peripheral Causes of Vibrations 12
3.0 NOISES IN CENTRIFUGAL PUPMS 13
3.1 Mechanical source of noise 13
3.2 Hydraulic source of noise 13
3.2.1 Transients 13
3.2.2 In-stationary of flow 14
3.2.2.1 Pressure pulsations 14
3.2.2.2 Turbulence in pump 14
3.2.2.3 Cavitation 16
4.0 DIAGONOSIS OF NOISE AND VIBRATION IN CENTRIFUGAL PUMP 18
4.1 MEASUREMENT 18
4.1.1 Noise measurement 18
4.1.2 Vibration measurement 19
4.2 ANALAYSIS OF MEASUREMENTS DATA 20
4.2.1 Unbalance 22
4.2.2 Eccentricity 23
4.2.3 Bent Shaft 23
4.2.4 Pump and motor misalignment 24
4.2.5 Blade and vane pass vibrations 25

Department of Hydrodynamic Systems
Page | 7
4.2.6 Flow turbulence 26
4.2.7 Cavitation 27
5.0 VIBRATION MONITORING 28
6.0 EXPERIMENTAL INVESTIGATION 29
6.1 CENTRIFUGAL PUMP MEASUREMENT 29
6.1.1 Formulae for the calculation 32
6.1.2 Calculation of Quantities 35
6.2 INVESTIGATION OF VIBRATION MONITORING 37
6.2.1 Analysis of the results 38
6.2.1.1 Rotational Speed at 1100 [RPM] 42
6.2.1.2 Rotational Speed at 1400 [RPM] 43
6.2.1.3 Rotational Speed at 1500 [RPM] 46
7.0 SUMMARY AND CUNCLUSION 49
REFRENCES 50

Department of Hydrodynamic Systems
Page | 8
1.0 INTRODUCTION
The contact feeling of vibrating machines is very important because we can understand whether
the machine is working properly or not. We can take drivers as an example, usually a routine driver
can detect if the car has mechanical issue by the vibration of the steering wheel or by engine knock.
Therefore the amplitude of the vibration is important to detect the engine’s (or machine’s) statues
of operation which of course it’s natural to have some level of vibration due to small, minor
defects. However, when those vibrations exceed the limit, we can assume that there is a mechanical
issue. The reason for that is usually because it is unbalanced, misaligned, or worn gears and since
not everyone has the experience needed to state a machine's condition based on how it feels.
Various measuring equipment have been developed over the years to measure the actual level of
vibration. Of course, human detection of faults through touch and feel is somewhat limited, and
there are many common problems such as the early stages of bearing and gear failure that are
generally out of the range of human perception. Thus, modern instrumentation for measuring
vibration on rotating and reciprocating machinery makes it possible to detect developing problems
that are outside the range of human senses of touch and hearing. Further, human perception differs
from individual to individual. What one person may consider as bad, another may consider as
normal. The attempt to follow the changes in machinery condition using human contact is nearly
impossible, since engineers can’t document on how a machine feels, hence it’s incorrect and
unprofessional. To overcome this problem, instruments have been developed to actually measure
a machine's vibration level and assign it a numerical value. These instruments help engineers to
overcome the limitations of human perception. In order to investigate the vibrations, it is necessary
to identify the machine and describe the vibration monitoring of a turbomachine (condition
monitoring).

Department of Hydrodynamic Systems
Page | 9
Condition monitoring is an important part of condition-based maintenance (CBM) [1, 2], which is
known to be the most efficient strategy for carrying out maintenance in a wide variety of industries.
Machines were originally ‘run to break’, which ensured maximum operating time between
shutdowns, but meant that breakdowns were occasionally catastrophic, with serious consequences
for safety, repair cost and production loss.
When it comes to a Centrifugal pump in the system, the investigation needs to be first defined as:
Centrifugal pumps are utilized widely in the oil and chemical industry [3, 4]. Huge amount of
energy has been paid to the condition monitoring and fault diagnosis of the centrifugal pump by
the field engineers and technicians. Therefore, monitoring of pumps is necessary to prevent a
decrease in their efficiency. Condition monitoring of rotating machinery is important in terms of
system maintenance and process automation. The main advances in vibration analysis in recent
years are the development in signal processing techniques, for vibration diagnostics of gearing
systems [5]. The development of the fast Fourier transform (FFT) in 1965 allowed the development
of commercial real-time spectral analyzers [6]. Vibration analysis has been used to diagnose
machines with rotating internals for some time [7, 8, and 9]. By measuring and analyzing the
vibration of a machine, it is possible to determine both the nature and severity of the defect, and
hence predict the machine’s useful life or failure point. In most common cases, vibration signals
can be read from accelerometers mounted on the outer surface of a bearing housing. The signals
consist of vibrations from the meshing gears, shafts, bearings, and other components. External
vibrations on a pump is measured and used to monitor the operating condition of the pump and
diagnose the fault without interfering with the normal operation. Spectral analysis is the most
common method is used to examine mechanical vibration. Condition monitoring and fault
diagnostics is needed to ensure that the machines run safely. Vibrations signals are important hence
in mechanical systems they often carry dynamic information from mechanical elements. These
mechanical signals normally consist of a combination of the fundamental frequency with a
narrowband frequency component and the harmonics. When a mechanical element is damaged or
worn the energy of vibration increases therefore they are related to the revolutions of the rotating
system.

Department of Hydrodynamic Systems
Page | 10
Some of the conventional techniques used for fault signals diagnosis include power spectra in
time domain or frequency domain, and they can provide an effective technique for machinery
diagnosis provided that there is the assumption that the signals are stationary. The main advances
in vibration analysis in recent years are the development in signal processing techniques, for
vibration diagnostics of gearing systems.

Department of Hydrodynamic Systems
Page | 11
2.0 VIBRATION
Vibrations basically are the displacement of a mass back and forth from its static position. A
force will cause a vibration, and that vibration can be described in terms of acceleration, velocity
or displacement. The force that will cause the vibration, must overcome the structure’s mass,
stiffness and damping properties. These properties are inherent to the structure and will depend
on the materials and design of the machine. Whereas noise is one of the derivatives of vibrations.
Both phenomenon affect the centrifugal pump performance and its service life adversely.
Sources of vibrations and noise are well known but the methods to trace the exact source are still
in development stage [1, 2]. The major challenge in diagnosis of vibrations and noise in centrifugal
pumps is service of the centrifugal pump itself. When we compare the machine tools or other
utility equipment with centrifugal pumps, diagnosis of the sources of noise and vibrations in
machine tools is simpler than pumps as all the components are mechanical and are visible.
Whereas in centrifugal pumps, the root of vibrations and noise may lie in mechanical or
hydraulic aspects. It is very easy to trace the mechanical causes but it becomes very difficult to
trace hydraulic causes. This makes pumps vibration and noise diagnostic very complex.
2.1 VIBRATION IN CENTRIFUGAL PUMPS
It is necessary to be interested in vibration in centrifugal pumps because it has a major effect on
the performance. Generally, increasing vibration levels indicate a premature failure, which always
means that the equipment has started to destroy itself. It is because excessive vibration are the
outcome of some system malfunction. It is expected that all pumps will vibrate due to response
from excitation forces, such as residual rotor unbalance, turbulent liquid flow pressure pulsation,
and cavitation or pump wear. The magnitude of the vibration will be amplified if the vibration
frequency approaches the resonant frequency of a major pump, function or piping component.
Generally higher vibration levels (amplitudes) are indicative of fault developing in mechanical
equipment.

Department of Hydrodynamic Systems
Page | 12
The sources of vibration in centrifugal pumps can be categorized into three types: Mechanical
causes, Hydraulic causes and Peripheral causes.
2.2.1 Mechanical Causes of vibration:
Unbalanced rotating components
Damage impellers and non-concentric shaft sleeves
Bent or warped shaft
Pipe strain (either by design or as a result of thermal growth)
Inadequacy of foundations or poorly designed foundations
Thermal growth of various component, especially shafts
Rubbing parts
Worm or loose bearing, Loose parts
Loosely held holding down bolts
Damaged parts
2.2.2 Hydraulic Causes of Vibrations:
Operating pump at other than best efficiency point (BEP)
Vaporization of the product
Impeller vane running too close to the pump cutwater
Internal recirculation
Air entrapment into the system through vortexting etc.
Turbulence in the system (non-laminar flow)
Water hammer
2.2.3 Peripheral Causes of Vibrations:
Harmonic vibration from nearby equipment or drivers
Operating the pump at a critical speed

Department of Hydrodynamic Systems
Page | 13
3.0 NOISES IN CENTRIFUGAL PUPMS
Noise is an important quality and comfort feature of any centrifugal pump. Abrupt noise in
pumping system for most of the times is an outcome of vibrations set in pumping system. Although
a certain amount of noise is expected from centrifugal pumps and their drives, usually high noise
levels (in excess of 100db) is an indication of potential mechanical failure or vibration problems.
The occurrence of significant noise levels indicates that sufficient energy exists to be a potential
cause of mechanical failure of the pump and piping. Noise in centrifugal pumps and systems can
be generated by mechanical motion of pump components and by liquid motion of the pumps and
system.
3.1 Mechanical sources of noise
Common mechanical sources of noise include vibrating pump components or surfaces because of
pressure variations that are generated in the liquid or air. Impeller or seal rubs, defective or worn
bearings, vibrating pipe walls and unbalanced rotors are the examples of mechanical sources of
noise in pumping systems.
Improper installation of couplings in centrifugal pumps often causes noise at twice the pumping
speed (Misalignment). If the pump speed is near or passes through lateral critical speed, noise can
be generated by high vibrations resulting from imbalance or by rubbing of bearings, seals or
impellers. If rubbing occurs, it is characterized by a high-pitched squeal.
3.2 Hydraulic sources of noise
Hydraulic sources of noises includes following:
3.2.1 Transients:
Starting and stopping of pumps with the attendant opening and closing of valves is a major cause
of severe transition in pumping systems. The resulting pressure surges, known as water hammer
can apply a sudden impact force on pump. The discrete energy produced during the course is then
dissipated as noise and is way above the audible noise intensities. Rapid closure of conventional
valves used in feed water lines can cause severe water hammer.

Department of Hydrodynamic Systems
Page | 14
Analytical methods are available to evaluate severity of water hammer in a particular piping
configuration for different closure rates.
3.2.2 In-stationarity of flow
The in-stationarity of the flow is caused by secondary flows in the impeller due to rotation, the
finite number of blades and finite blade thickness, but also by effects of turbulence. The finite
number of blades leads to a secondary flow, caused by the asymmetric outgoing flow of the
impeller. The finite blade thickness causes a notch in the wake flow. Both effects result in a time-
dependent incident flow on the resting parts (guide vanes of the diffuser, volute tongue of the
guide casing) and consequently excite vibration of these parts. In-stationarity of flow is combined
effect of pressure pulsations and turbulence.
3.2.2.1 Pressure pulsations due to the finite number of blades
Pressure pulsations are detected at discrete frequencies that are multiples of the rotating frequency
and the number of blades; these frequencies are also called blade passing frequencies.
(BPF): Blade Pass Frequency, (BPF) = number of blades (or vanes) × rpm
The amplitude of these pressure pulsations depends on a number of design parameters of impeller
and diffuser and operating parameters. One of the most important parameters is the distance
between impeller and the volute tongue. Smaller distances typically result in much higher
amplitude of the BPF. However, this distance also affects the efficiency of the pump. Therefore,
in industrial practice often a compromise has to be found between hydraulic efficiency and noise
specification.
3.2.2.2 Turbulence in pumps
Flow turbulence induces vortices and wakes in the clearance space between the impeller vane tips
and the diffuser or volute lips. Dynamic pressure fluctuations or pulsations produced in this way
can result in shaft vibrations because the pressure pulses impinge on the impeller. Flow past a
restriction in pipe can produce turbulence or flow induced vibrations. Fig 1.

Department of Hydrodynamic Systems
Page | 15
Fig 1 -Turbulence and vortices formation in flow through impeller (Reference [5])
The pulsation could produce noise and vibration over a wide frequency range. The frequencies
are related to the flow velocity and geometry of the obstruction. These in turn excite resonant
frequencies in other pipe components. The shearing action produces vortices that are converted to
pressure disturbances at the pipe wall, which may cause localized vibration excitation of the pipe
or its components. It has been observed that vortex flow is even higher when a system’s acoustic
resonance coincides with the generated frequency from the source. The vortices produce
Broadband turbulent energy centered on the frequency determined by the following formula:
𝑓 =𝑆𝑛 × 𝑉
𝐷
Where: f = vortex frequency (Hz), Sn = Strouhl number (dimensionless, between 0.2 and0.5),
D = characteristic dimension of the obstruction. (Reference [10])

Department of Hydrodynamic Systems
Page | 16
3.2.2.3 Cavitation
Cavitation is the formation of vapor cavities or bubbles in a liquid due to rapid change in pressures.
When a fluid suffers a pressure drop below its vapor pressure it evaporates and then collapse when
the pressure is raised back to a value higher than its vapor pressure. This implosion generates a
shockwave that can damage the pipelines in which the fluid is been transported and is a major
cause of wear in the fluid engineering field. Fig 2.
Fig 2 - Cavitation bubble imploding creating a jet next to a surface (Reference [11])
Cavitation normally generates random, high frequency broadband energy, which is sometimes
superimposed with the blade pass frequency harmonics. Gases under pressure can dissolve in a
liquid. When the pressure is reduced, they bubble out of the liquid. In a similar way, when liquid
is sucked into a pump, the liquid’s pressure drops. Under conditions when the reduced pressure
approaches the vapor pressure of the liquid (even at low temperatures), it causes the liquid to
vaporize. As these vapor bubbles travel further into the impeller, the pressure rises again causing
the bubbles to collapse or implode. This implosion has the potential to disturb the pump
performance and cause damage to the pump’s internal components. This phenomenon is called
cavitation. Each implosion of a bubble generates a kind of impact, which tends to generate high-
frequency random vibrations, as depicted in Fig 3.

Department of Hydrodynamic Systems
Page | 17
Cavitation can be quite destructive to internal pump components if left uncorrected. It is often
responsible for the erosion of impeller vanes. Fig 4.
Fig 3 – Effect of Cavitation in Centrifugal Pump (Reference [12])
Fig 4 – Might be indirect effect of cavitation (Taken from MATLAB solution)
May cavitation
occurs

Department of Hydrodynamic Systems
Page | 18
4.0 DIAGNOSIS OF NOISE AND VIBRATION IN
CENTRIFUGAL PUMP
The diagnosis of noise and vibrations in centrifugal pumps is divided into two steps
Noise / Vibration measurement.
Analysis of measured vibration values.
4.1 MEASUREMENT
4.1.1 Noise measurement
Noise heard every day is not a pure sound of only one frequency, but it is often a combined sound
that includes various frequency components. Suppose two types of sources were measured and it
was found that their sound pressure levels were the same. If the noise is composed of differing
frequencies, the countermeasure of soundproofing to be taken would naturally be different. To
know the characteristics of a noise and propose preventative measures, it is important to identify
the frequency components of that noise. The sound pressure level per Hz is called the "spectrum
pressure level". A sound in which all of the spectrum pressure levels are equal (whatever the pitch,
the loudness is the same) is called "white noise". The preferred series of octave bands for acoustic
measurements divides the audible range into ten bands. The center frequencies of these bands are
31.5, 63, 125, 250, 500, 1000, 2000, 4000, 8000 and 16000 Hz. The actual nominal frequency
range of any one of these bands is 2:1. This means that the effective band for the 1000-Hz octave
extends from 707 to 1414 Hz. In a frequency analysis, a graph is made of the results of octave-
band sound pressure level measurements Fig 5. The frequency scale is commonly divided into
equal intervals, between the position designated for each band and the position for the band
adjacent to it in frequency. The pressure level in each band is normally presented as horizontal
lines centered on the band at the measured level.

Department of Hydrodynamic Systems
Page | 19
Below is an example of octave band frequency analysis.
Fig 5 – Octave band frequency analysis (Reference [4])
4.1.2 Vibration measurement
Mechanical vibrations are most often measured using accelerometers, but displacement probes
and velocity sensors are also used. Generally, a portable vibration analyzer is preferred. The
analyzer provides the amplification of the sensor signal, it does the analogue to digital conversion,
filtering, and conditioning of the signal. Many analyzers also offer advanced processing of the
collected signals, as well as storage and display of the data.
It is also important to know the location to mount the vibration mounts. We know that a force
cause vibration. If we know what types of forces are generating the vibration, we will have a good
idea how they will be transmitted through the physical structure of the machine and where they
will cause vibrations. With rotating machines, this point is almost always directly on the machine’s
bearings.

Department of Hydrodynamic Systems
Page | 20
The reason for this is that the various dynamic forces from a rotating machine must be transmitted
to the foundation through the bearings. As a rule of thumb, vibration readings on rotating machines
must be taken in the horizontal, vertical and axial direction on each bearing as shown in Fig 6 and
Fig 7. (Reference [2])
Fig 6 – Radial locations of vibration mounts Fig 7 – Axial locations of vibration mounts
4.2 ANALAYSIS OF VIBRATION MEASUREMENTS DATA
There are many different methods available for analyzing vibration data. The most basic method
involves displaying the vibration data in the frequency domain, also called the vibration spectrum.
The frequency of the vibration is the number of vibration cycles per time unit. The vibration
spectrum is fundamental to vibration monitoring, because it yields the information that is
effectively "hidden" in the vibration waveform. Vibration spectra can be represented in various
different ways, of which the Fast Fourier Transform (FFT) and the Power Spectral Density (PSD)
are the most popular. The concept of the vibration spectrum can be simply explained by means of
an example.

Department of Hydrodynamic Systems
Page | 21
Consider the time waveform in Fig 8, which has a frequency of 10 Hz (we can count ten complete
cycles during one second) and amplitude of 5 mm (the units of the amplitude could be any unit
related to vibration, e.g. displacement, velocity or acceleration). The time waveform is a plot of
time vs. amplitude, and is referred to as the time domain. The time domain signal can be converted
into a frequency domain representation, which is in fact the spectrum. The spectrum is a plot of
frequency vs. amplitude.
The FFT for the time waveform from Fig 8 is plotted in Fig 9. We can clearly read from this plot
that the frequency content of the signal is 10 Hz, and that its amplitude at 10 Hz is 5 mm.
Fig 8. Vibration spectrum (Reference [2]) Fig 9. FFT time waveform (Reference [2])
What now, if our time waveform has more than one frequency present? Let’s take a look at another
example. Consider the waveforms in Fig 10 (Reference [2]). In the top graph we have our 10 Hz
waveform, called S1. The second waveform is a 25 Hz waveform with amplitude 2 mm, which
we can call S2. The third waveform, plotted at the bottom, is S1+S2, which yields a much more
complex waveform. Let us examine the FFT for S1+S2, depicted in Fig 9 (Reference [2]). We
can clearly observe two peaks in spectrum, namely a 5 mm peak at 10 Hz, and a 2 mm peak at 25
Hz. Thus, by only looking at the spectrum, we can characterize our S1+S2 waveform much better
than by examining the waveform from Fig 10 (Reference [2]).

Department of Hydrodynamic Systems
Page | 22
The frequency spectrum is hence much easier to interpret and gives us information that is often
impossible to observe by just looking at the time waveform Fig 11 (Reference [2]). FFT is explain
more in Appendix 1.
From the trends in FFT time waveform, we can diagnose the cause behind vibrations. Some of the
common vibration causes and its diagnosis are given below:
4.2.1. Unbalance
For all types of unbalance, the FFT spectrum will show a predominant peak at the 1× rpm
frequency of vibration, and the vibration amplitude at the 1× rpm frequency will vary proportional
to the square of the rotational speed. If the problem is unbalance, this peak usually dominates the
vibration spectrum Fig 12 and 13. (Reference [2])
Fig 12. Vibration measurement locations Fig 13. FFT readings showing vibration
Peak due to unbalance.
Fig 10. Vibration spectrum of S1+S2 Fig 11. FFT time waveform of S1+S2

Department of Hydrodynamic Systems
Page | 23
4.2.2. Eccentricity
Eccentricity occurs when the center of rotation is at an offset from the geometric centerline, and
this may happen if the pump impeller is eccentric due to a manufacturing or assembly error. In the
vibration spectrum, the maximum amplitude occurs at 1× rpm of the eccentric component, and
will vary with the load even at constant speeds. In the horizontal direction, a phase shift of 90°
will be observed.
4.2.3. Bent Shaft
When a bent shaft is encountered with a pump, the vibrations in the radial as well as in the axial
direction will be high. Axial vibrations may be higher than the radial vibrations. The spectrum will
normally have 1× and 2× components, as shown in Fig 14. If the:
• Amplitude of 1× rpm is dominant, then the bend is near the shaft center
• Amplitude of 2× rpm is dominant, then the bend is near the shaft end.
This means that when the probe is moved from vertical plane to horizontal plane, there will be no
change in the phase reading.
Fig14. Bent Shaft (Reference [2])

Department of Hydrodynamic Systems
Page | 24
4.2.4. Pump and motor misalignment
There are basically two types of misalignment that can occur between the motor and the pump:
• Angular misalignment – the shaft centerlines of the two shafts meet at angle
• Parallel misalignment – the shaft centerlines of the two machines are parallel
As shown in Fig 15, angular misalignment primarily subjects the motor and pump shafts to axial
vibrations at the 1× rpm frequency. A pure angular misalignment is rare, and thus, misalignment
is rarely seen just as 1× rpm peak. Typically, there will be high axial vibrations with both 1× and
2× rpm. However, it is not unusual for 2× or 3× to dominate. These symptoms may also indicate
coupling problems (e.g. looseness) as well. A 180° phase difference will be observed when
measuring the axial phase on the bearings across the coupling. Parallel misalignment Fig 16 results
in two hits per rotation; and, therefore a 2× rpm vibration in the radial direction. Parallel
misalignment has similar vibration symptoms compared to angular misalignment. As before, a
pure parallel misalignment is rare and is commonly observed to be in conjunction with angular
misalignment. Thus, both the 1× and 2× peaks will typically be observed. When the parallel
misalignment is predominant, 2× is often larger than 1×, but its amplitude relative to 1× may often
be dictated by the coupling type. When either angular or parallel misalignment becomes severe, it
can generate high amplitude peaks at much higher harmonics - (3× to 8×) or even a whole series
of high frequency harmonics.
Fig 15. Angular Misalignment (Reference [2])

Department of Hydrodynamic Systems
Page | 25
Fig 16. Parallel Misalignment (Reference [2])
4.2.5 Blade pass and vane pass vibrations
Blade pass or vane pass frequencies are vibrations inherent to pumps and fans. In itself, it usually
not problematic or destructive, but can generate a lot of noise and vibration that can be the source
of bearing failure and wear of machine components.
Blade Pass Frequency (BPF) = number of blades (or vanes) × rpm
This frequency is generated mainly due to the gap problems between the rotor and the stator. Large
amplitude BPF (and its harmonics) can be generated in a pump, if the gap between the rotating
vanes and the stationary diffusers is not kept equal all the way around. In centrifugal pumps, the
gap between the impeller tip and the volute tongue or the diffuser inlet is in the region of 4-6% of
the impeller diameter, depending on the speed of the pump. If the gap is less than the recommended
value, it can generate a noise that resembles cavitation. However, a vibration reading will
immediately reveal the vane pass frequency of the impeller Fig 17.
Also, the BPF (or its harmonics) sometimes coincides with a system natural frequency, causing
high vibrations. Fig 17.

Department of Hydrodynamic Systems
Page | 26
Fig 17. FFT waveform pattern for Vane pass pulsations
A high BPF can be generated if the wear ring seizes on the shaft or if the welds that fasten the
diffusers fail. In addition, a high BPF can be caused by abrupt bends in line work (or duct),
obstructions which disturb the flow path, or if the pump impeller is positioned eccentrically within
the housing.
4.2.6 Flow turbulence
In pumps, flow turbulence induces vortices and wakes in the clearance space between the impeller
vane tips and the diffuser or volute lips. Dynamic pressure fluctuations or pulsations produced in
this way can result in shaft vibrations because the pressure pulses impinge on the impeller. Flow
past a restriction in pipe can produce turbulence or flow induced vibrations. The pulsation could
produce noise and vibration over a wide frequency range. The frequencies are related to the flow
velocity and geometry of the obstruction. These in turn excite resonant frequencies in other pipe
components. The shearing action produces vortices that are converted to pressure disturbances at
the pipe wall, which may cause localized vibration excitation of the pipe or its components. It has
been observed that vortex flow is even higher when a system’s acoustic resonance coincides with
the generated frequency from the source. The vortices produce broadband turbulent energy
centered on the frequency determined by the following formula:
𝑓 =𝑆𝑛 × 𝑉
𝐷

Department of Hydrodynamic Systems
Page | 27
Where f = vortex frequency (Hz), Sn = Strouhl number (dimensionless, between 0.2 and 0.5),
D = characteristic dimension of the obstruction. An example of a vibration spectrum due to
turbulence is shown in Fig 18.
Fig 18 - FFT waveform pattern for Flow turbulence (Reference [2])
4.2.7 Cavitation
Cavitation normally generates random, high frequency broadband energy, which is sometimes
superimposed with the blade pass frequency harmonics. Gases under pressure can dissolve in a
liquid. When the pressure is reduced. Under conditions when the reduced pressure approaches the
vapor pressure of the liquid (even at low temperatures), it causes the liquid to vaporize. As these
vapor bubbles travel further into the impeller, the pressure rises again causing the bubbles to
collapse or implode. This implosion has the potential to disturb the pump performance and cause
damage to the pump’s internal components. This phenomenon is called cavitation. Each implosion
of a bubble generates a kind of impact, which tends to generate high-frequency random vibrations,
as depicted in Fig 19.
Cavitation can be quite destructive to internal pump components if left uncorrected. It is often
responsible for the erosion of impeller vanes.

Department of Hydrodynamic Systems
Page | 28
Measurements to detect cavitation are usually not taken on bearing housings, but rather on the
suction piping or pump casing.
Fig 19 - FFT waveform pattern for Cavitation (Reference [2])
5.0 VIBRATION MONITORING
Vibration Monitoring or Condition monitoring (CM) is the process of monitoring a parameter of
conditions in machinery (vibration, temperature, etc.), in order to identify a significant change
which is indicative of a developing fault. It is a major component of predictive maintenance. The
use of conditional monitoring allows maintenance to be scheduled, or other actions to be taken to
prevent failure and avoid its consequences. Condition monitoring techniques are normally used on
rotating equipment and other machinery such as pumps, electric motors, internal combustion
engines and presses. Since corrosion can lead to unexpected failures that can be costly in terms of
repair costs, environmental damage and potential harm to humans, condition monitoring is
indispensable to avoid these consequences. By considering all information, which are explained
before, it helps us to predict the failures.

Department of Hydrodynamic Systems
Page | 29
6.0 EXPERIMENTAL INVESTIGATION
In order to investigate the system, there are two measurements, which are operated at the same
time, and these are defined in following ways. At the first step, the measurement is to determine
the following characteristic of single-stage centrifugal pump at 11 deferent revolution number
(from 480 to 1500 RPM). In the second step, the aim is to investigate the effect of vibration on
turbomachine and by using the vibration monitoring techniques. Here it is possible to investigate
the changes of amplitudes and frequencies, in order to explain the behavior of turbomachine under
vibration effects.
As it was mentioned, both steps are doing at the same time, which means by setting a constant
revolution number and changing the flow rate by a throttle valve, first of all we measure
characteristics of the pump and second of all investigate the spectrum (which is recording by a
program called Lab View on the computer in the laboratory of HDS department).
6.1 CENTTRIFUGAL PUMP MEASUREMENT
To determine following characteristics of the single-stage centrifugal pump, it is needed to define
the functions:
𝐻 = 𝑓1(𝑄) Head as a function of flow rate.
𝑃𝑖 = 𝑓2(𝑄) Input power as a function of flow rare.
𝜂 = 𝑓3(𝑄) Efficiency as a function of flow rate.
Low of affinity can be employ.
The sketch of the experimental test rig is shown in Fig 21. The water arrives from the reservoir to
a centrifugal pump (single-stage) (P) which is driven by the electric motor (M). Then the fluid
enters into the pump at the suction side (I) and it leaves at the pressure side (II) through the pipeline
towards the metering orifice (MO) and at the final stage, it goes back at the reservoir through the
throttle valve (TV). The configuration of the test rig is shown on next page. (Reference [13])

Department of Hydrodynamic Systems
Page | 30
Fig 21 – Test rig (Reference [13])
Fig 22 – Manometers and Throttle Valve
Manometer
2
Manometer
1
Throttle
valve

Department of Hydrodynamic Systems
Page | 31
Rotational speed (revolution number) was controlled by an electric setting board Fig 23.
Fig 23 – Rotational speed controller
The rotational speeds were checked by using a Jaquet indicator in the motor Fig 24.
Fig 24 – Jaquet indicator
Speed
controller

Department of Hydrodynamic Systems
Page | 32
Fig 25 – Balancing motor and Centrifugal pump
6.1.1 Formulae for the calculation
Although I tried to give a short explanation of used quantities and equations. During the
measurement operating point is set by the help of the throttle valve (TV). (Reference [13])
Inner diameter of the pipe D=53 mm
Type of pump BMS 25/48
Type of balancing motor Efk 56 I 4
Arm length of the balancing motor k = 716 mm
Diameter of the orifice plate d=30 mm
Balancing
motor
Centrifugal
Pump

Department of Hydrodynamic Systems
Page | 33
Measurement of flow rate (Q)
Flow rate can be measured by a flange tap orifice according to MSZ ISO 5167-1
𝑄 = 𝛼𝑑2𝜋
4√
2∆𝑝𝑝
𝜌𝑤𝑎𝑡𝑒𝑟 , ∆𝑝𝑝 = ∆ℎ1𝑔(𝜌𝐻𝑔 − 𝜌𝑤𝑎𝑡𝑒𝑟)
where: Q is flow rate [𝑚3/𝑠], d is orifice throat diameter [𝑚], α is discharge coefficient [-], ρwater
is density of water 1000[𝐾𝑔/𝑚3], ∆𝑝𝑝 is pressure drop through the orifice [Pa], 𝜌𝐻𝑔 is density
of mercury 13600[𝐾𝑔/𝑚3], ∆ℎ1 Height of Manometer 1 [𝐻𝑔𝑚𝑚], 𝑔 is gravity 9.81[𝑚/𝑠2].
Although the value of the discharge coefficient should be determined according to standard in an
iterative manner, since its value depends on Reynolds number (𝑅𝑒 = 𝑣 ∙ 𝑑/𝜈 = 𝑄𝑑/(𝐴 ∙ 𝜈) ) (we
approximate its value to be constant) and the kinematic viscosity is10−6 [𝑚2/𝑠].
By subsuming the needed quantities to make a simple equation of this test-rig according to an
iterative manner to determine the discharge coefficient by considering an approximation constant
Reynolds number.
𝑄[𝑚3/𝑠] = 2.2605 × 10−4 [[𝑚3/𝑠]
√𝐻𝑔𝑚𝑚] √∆ℎ1[𝐻𝑔𝑚𝑚]
Head (H)
According to definition of the head of the pump and subsuming it to employ the pressure balance
equation for manometer 1 and neglecting the geodetic height deference
𝐻 = ∆ℎ1
(𝜌𝐻𝑔 − 𝜌𝑤𝑎𝑡𝑒𝑟)
𝜌𝑤𝑎𝑡𝑒𝑟+
𝑄2
(𝑑2𝜋
4 )2 ∙
1
2𝑔
where: H is head [𝑚], Q is flow rate [𝑚3/𝑠], d is orifice throat diameter [𝑚], ρwater is density of
water 1000[𝐾𝑔/𝑚3], 𝜌𝐻𝑔 is density of mercury 13600[𝐾𝑔/𝑚3], ∆ℎ1 Height of Manometer 1
[𝐻𝑔𝑚𝑚], 𝑔 is gravity 9.81[𝑚/𝑠2].
(3)
(2)
(1)

Department of Hydrodynamic Systems
Page | 34
Substituting the known quantities the head is
𝐻[𝑚] = 0.0126[−] ∆ℎ1[𝑚] + 1324.4 [𝑚
𝑚6/𝑠2] (𝑄[𝑚3/𝑠])2
Input Power (Pi)
The input power [W] is the mechanical power of the shaft which produces the torque 𝑀𝑡 [Nm] on
the shaft and angular velocity [Rad/s]
𝑃𝑖 = 𝑀𝑡 ∙ 𝜔
The torque acting on the shaft is measured by balancing motor (M) and can be calculated by
𝑀𝑡 = (𝑚 − 𝑚0)𝑔 ∙ 𝑘
The mass needed to balance the motor is expressed by:
𝑚0 = 0.04 − 0.03 ∙ (𝑛
1000) + 0.04 ∙ (
𝑛
1000)2
Where: m is the measured balancing mass[𝑘𝑔], m0 is the balancing mass needed for idle run[𝐾𝑔],
K Arm length of balancing motor [mm], n is revolution number [rpm].
Useful Power (Pu)
𝑃𝑢 = 𝑄 ∙ 𝜌𝑤𝑎𝑡𝑒𝑟 ∙ 𝑔 ∙ 𝐻
Efficiency of Pump (η)
Efficiency of the pump is the fraction of the useful power and input power
𝜂 = 𝑃𝑢/𝑃𝑖
where: 𝑃𝑢 is useful power [w], 𝑃𝑖 is input power [W].
(4)
(5)
(6)
(7)
(8)
(9)

Department of Hydrodynamic Systems
Page | 35
6.1.2 Calculation of Quantities
In order to make the calculation easier, every units of quantities where converted to the SI units
and it has been calculated on Excel.
∆h2 pred Δh2[Hgmm] Δh1[Hgmm] m [kg]
1 0 0 387 0.18
2 1 1 385 0.19
3 3 3 378 0.2
4 6 6 374 0.22
5 12 12 366 0.24
6 18 18 352 0.26
7 26 26 333 0.27
8 35 35 311 0.28
9 46 46 286 0.28
10 58 58 261 0.3
11 72 72 223 0.3
12 87 87 189 0.31
13 104 104 141 0.32
14 122 122 98 0.32
Q H M Puseful Pinput η η [%]
0 4.8762 1.018474 0 106.6544 0 0
0.000226 4.851068 1.088714 10.75749 114.0098 0.094356 9.435578
0.000392 4.763003 1.158953 18.29427 121.3653 0.150737 15.07372
0.000554 4.712806 1.299433 25.59934 136.0763 0.188125 18.81249
0.000783 4.612412 1.439912 35.43172 150.7872 0.234978 23.49783
0.000959 4.436418 1.580391 41.73902 165.4982 0.252202 25.22023
0.001153 4.19756 1.650631 47.4632 172.8536 0.274586 27.45861
0.001337 3.920969 1.72087 51.43999 180.2091 0.285446 28.54461
0.001533 3.606713 1.72087 54.24554 180.2091 0.301014 30.10144
0.001722 3.292525 1.861349 55.60535 194.9201 0.285273 28.52726
0.001918 2.814673 1.861349 52.9624 194.9201 0.271713 27.17134
0.002108 2.387288 1.931589 49.3785 202.2755 0.244115 24.41151
0.002305 1.783638 2.001829 40.33638 209.631 0.192416 19.24161
0.002497 1.243056 2.001829 30.44698 209.631 0.145241 14.52408
Fig 26 – Data calculated in excel for revolution number 1000 [RPM]

Department of Hydrodynamic Systems
Page | 36
The mathematic way to evaluate the number of measurement to predict the different heights on
manometer 2 which defines the sets of changes in flow rates is explained in Appendix (3).
As all the quantities and needed equations for calculation of the characteristic curve of the pump
were expressed, so I am able to plot the curves and identify the polynomial equations of the curves
by using Excel. A diagram showing the relationship between 2 variable but interdependent
quantities which are heads and flows rate and efficiencies of the pump. In order to contain all the
calculations, I added all the diagrams in Appendix (4).
𝐻 = 𝑓1(𝑄) Head as a function of flow rate.
Fig 27 – Characteristic curve of the pump at revolution number 1000[RPM]
𝜂 = 𝑓3(𝑄) Efficiency as a function of flow rate.
Fig 28 – Efficiency curve of the pump at revolution number 1000[RPM]
y = -658431x2 + 210.8x + 4.833
0
1
2
3
4
5
6
0 0.0005 0.001 0.0015 0.002 0.0025 0.003
He
ad [
m]
Flow Rate [m3/s]
Characteristic curve of the pump
at n1000
Poly. (at n1000)
y = -135472x2 + 394.47x + 0.0076
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0 0.0005 0.001 0.0015 0.002 0.0025 0.003
Effi
cie
ncy
[-]
Flow Rate [m3/s]
Efficiency curve of the pump
at n1000
Poly. (at n1000)

Department of Hydrodynamic Systems
Page | 37
6.2 INVESTIGATION OF VIBRATION MONITORING
In order to demonstrate the practical usage of vibration monitoring in a turbomachine, the
following experiment was performed. As it was mention before during this measurement, the most
important aim is the investigation of the vibration caused by a turbomachine.
The configuration of the Test-rig was explained in the previous step, except the part which we can
measure the vibration spectrum. Although it is necessary to show the configuration. So the Test-
rig is exactly the same like what was explained in before but in order to show the sensor and
computer, I added the Fig 29.
Fig 29 – The Test-rig (Reference [14])
The sketch of the system is shown on Fig 29. A BMS 25/48 type centrifugal pump (S) is integrated
to the system, the suction side of the pump connects to a water tank. On the vertical pressure side
there is a built-in Hottinger Baldwin Messtechnik 132.17 type pressure transmitter (P) with the
measuring range of 0-10 bar. The signal of the pressure transducer goes to Hottinger KWS 3072
type signal processing system (J), from there towards to the computer.

Department of Hydrodynamic Systems
Page | 38
6.2.1 Analysis of the results
Our measurement consisted 11 different amount of revolution number which was controlled by
an electronic setting board Fig.(23) with each having various amount of different flow rate where
the maximum flow rate was measured when the throttle valve was fully open. Than as we
controlled the throttle valve we obtained different flow rates, until the throttle valve was fully
closed. Each time the flow rate was set, we calculated the head at each throttle valve position since
their relationship is fundemental for the characteristic curve of the centrifugal pump. The
characteristic curve contains the different points with respect to the number of flow rates with the
number of heads. Fig.(30).
Fig 30 - Characteristic Curve of the Centrifugal Pump (Taken from Excel calculation)
0
2
4
6
8
10
12
0 0.0005 0.001 0.0015 0.002 0.0025 0.003 0.0035 0.004
He
ad [
m]
Flow Rate [m3/s]
Characteristic Curve of the Centrifugal Pump
n480
n600
n700
n800
n900
n1000
n1100
n1200
n1300
n1400
n1500
Poly. (n480)
Poly. (n600)
Poly. (n700)
Poly. (n800)
Poly. (n900)
Poly. (n1000)
Maximum
Fully open
Minimum
fully closed
Each point has a
Spectrum

Department of Hydrodynamic Systems
Page | 39
There are many different methods available for analyzing vibration data. The most basic method
involves displaying the vibration data in the frequency domain, also called the vibration spectrum.
The frequency of the vibration is the number of vibration cycles per time unit. The vibration
spectrum is fundamental to vibration monitoring, because it yields the information that is
effectively "hidden" in the vibration waveform. We have one vibration spectrum for each
measurement of the flow rate which is emphasized by the arrows in the Fig 30. (From maximum
to minimum). The figure below will consist an example of the vibration spectrum Fig 31.
Fig 31 – The Vibration Spectrum (Taken from MATLAB solution)
Rotational speed Harmonics
Blade Pass

Department of Hydrodynamic Systems
Page | 40
From each revolution number we gather the vibration spectrums hence the different flow rates
and plot them in a 3D diagram (X,Y,Z) which consist three axis Frequency[Hz], Amplitude[V]
and Flow rate[𝑚3/𝑠] respectively. This 3D diagram is called the Waterfall diagram which is a
form of data visualization that helps in understanding the cumulative effect of noises and
vibrations in the centrifugal pump. With the help of this diagram we can explain the phenomenon
such as the Unbalance, Parallel misalignment, Blade pass, Vortex shedding and etc. The
waterfall diagram can be seen in Fig 32.
Fig 32 – Waterfall Diagram of revolution number 1000[RPM]

Department of Hydrodynamic Systems
Page | 41
In case of a high revolution number it is difficult to read and examine the waterfall diagram due to
too many vibration spectrums. Therefore to make it clearer, a Contour plot is defined in our
MATLAB code which help us to investigate the spectrum pattern easier and more efficient. We
build this plot by converting the vector of frequency and flowrate into the matrix form in which
we can see the intensity of maximum peaks and minimum peaks easily with the help of different
shades of colors. This can be seen in the figure below Fig 33.
Fig 33 – Contour plot of revolution number 1000[RPM]

Department of Hydrodynamic Systems
Page | 42
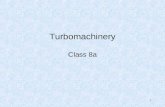
6.2.1.1 Rotational Speed at 1100 [RPM]
Fig 33 – Unusual wave which can be effect of unbalance
In this waterfall diagram an unusual wave can be seen and it can be caused by unbalance.
Unbalance can make vibration on the turbomachinery and the proof was having vibration during
the measurement. The waterfall diagram is given to make it more visible what changes are
happening in the waves.
For all types of unbalance, the FFT spectrum will show a predominant peak at the 1× rpm
frequency of vibration, and the vibration amplitude at the 1× rpm frequency will vary proportional
to the square of the rotational speed. If the problem is unbalance, this peak usually dominates the
vibration spectrum. The low rotational speed were not discoursed because, during the
measurement at low revolution number (rotational speed), motor was mostly balanced.
Unbalance

Department of Hydrodynamic Systems
Page | 43
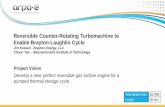
6.2.1.2 Rotational speed at 1400 [RPM]
One of the interesting measurement which had high vibration at the high flow rate, it was when
we set the revolution number to 1400 [RPM], see Fig 34. However, from the waterfall diagram it
can be discoursed, what is the reason of the vibration and in which region it was happened.
Fig 34 – Wave form pattern of Blade pass frequency
As mentioned in page 41, to be able to analyze the waterfall diagram Fig.34 better, we shall use
the contour plot diagram. Thus, the region of the blade pass frequency is shown in the Fig 35 with
red color.
Blade pass

Department of Hydrodynamic Systems
Page | 44
Fig 35 – Surface plot of blade pass frequency pattern is shown in Red region
Blade pass or vane pass frequencies are vibrations inherent to pumps and fans. In itself, it usually
not problematic or destructive, but can generate a lot of noise and vibration that can be the source
of bearing failure and wear of machine components. Regarding to our centrifugal pump which has
7 blades.
Blade Pass Frequency (BPF) = number of blades (or vanes) × rpm
This frequency is generated mainly due to the gap problems between the rotor and the stator.
However, a vibration reading will immediately reveal the vane pass frequency of the impeller.
Also, the BPF (or its harmonics) sometimes coincides with a system natural frequency, causing
high vibrations. It can be the reason of having a bit high vibration at rotational speed 1400[RMP].
Blade Pass frequency

Department of Hydrodynamic Systems
Page | 45
The last but not least, it is an unusual non uniform alignment of peak which can be seen in brown
region in Fig 35 can be indirect effect of cavitation. My educated guess is that at high values of
flow rate decrease and increase of amplitude in the peaks in frequencies above 150 Hz can be seen.
One of the reasons which this happens, could be the as a result of cavitation. At high flow rates
flow velocity rises and pressure drops. If this pressure drop is big enough, there is a chance of
cavitation happening between the blades. But the other guess is that indirect effect of cavitation
might be everywhere at high frequencies which can be the reason of having noise and it can have
effect on all the spectrum but as we are not able to see the phenomenon on the suction side of the
pump so it is hard to discussed about it and can be as a question in this project.

Department of Hydrodynamic Systems
Page | 46
6.2.1.3Rotational Speed at 1500 [RPM]
Due to our experiment, the most noises and vibrations were happing at this rotational speed
(n=1500 [RPM]), which makes it more important to investigate on this rotational speed, which is
critical in our measurement and it can cause some failure in the centrifugal pump if it works for a
long time (be used) at this set rotational speed (n=1500 [RPM])
Fig 36 – Effect of Vortex Shedding (Vortices frequency) in the Red region
Vortex shedding can be the effect of having this low peak waves which it is shown in red region
in Fig 36, which can be called random waves either. As it was mentioned in Subtitle 4.2.6, in
pumps, flow turbulence induces vortices and wakes in the clearance space between the impeller
vane tips and the diffuser or volute lips. Dynamic pressure fluctuations or pulsations produced in
this way can result in shaft vibrations because the pressure pulses impinge on the impeller. Flow
past a restriction in pipe can produce turbulence or flow induced vibrations. The pulsation could
produce noise and vibration over a wide frequency range. In this case, it can make excited resonant
frequency in pipe-line.
Vortex
shedding

Department of Hydrodynamic Systems
Page | 47
Fig 37 – Effect of Parallel Misalignment in the Red region
As it is show in the Red region, see Fig 37. It is possible to express that mainly at low flow rate
(0 to 1[𝑚3/𝑠]), we usually have high vibration and loud noise which can be caused by the
connection between Pump and Motor, which is called Parallel Misalignment. As a pure parallel
misalignment is rare and is commonly observed to be in conjunction with angular misalignment.
Thus, both the 1× and 2× peaks will typically be observed. When the parallel misalignment is
predominant, 2× is often larger than 1×, but its amplitude relative to 1× may often be dictated by
the coupling type. It can generate high amplitude peaks at much higher harmonics - (3× to 8×) or
even a whole series of high frequency harmonics.
1x

Department of Hydrodynamic Systems
Page | 48
During the performance of this particular measurement, a loud noise was heard while the
equipment was functioning from the beginning until the end that is why the measurement at this
rotational speed is more discussable.
One of the important factors which cannot be eliminated, is the existence of unbalance motor which
can have a negative effect on the Centrifugal Pump. The reason we emphasize it is because during
our measurement we observed the unbalance motor vibrating intensively, which was recorded by
camera. The other reason of vibration is usually vane pass frequency (Blade pass frequency) in
most of the performances.

Department of Hydrodynamic Systems
Page | 49
7.0 SUMMARY AND CONCULSION
The main task of this Project was to summarize the reasons of turbomachine failure and a way of
monitoring those causes during the operation of the turbomachine. Furthermore, the analysis of
the results of Condition Monitoring (Vibration Monitoring) was explained with a practical
experiment performed in the laboratory of the Department of Hydrodynamic Systems of the
Budapest University of Technology and Economics.
The results of our measurement indicate a significant variation in vibration trend as a function of
operating conditions. The experimental results demonstrated that the vibration monitoring rig
modeled various modes of machine failure. Failure can be caused either by single phenomenon or
simultaneous phenomenon. Such phenomenon are as follows:
Balancing Motor which can become unbalanced sometimes which will affect the
measurement itself.
Parallel Misalignment (misalignment of pump and motor)
Blade pass and Vane pass
Vortex shedding
In this measurement an experimental test system was set up and we were able to perform practical
tests on the constructed rig to confirm the expected theoretical frequencies that we needed. This
experiment was offered complementary strengths in the cause of the analysis of machine failure,
and natural allies in diagnosing machine condition. It reinforces indications correlation between
vibration condition monitoring and fault diagnosis for centrifugal pump. Both amplitude of the
dominating peak and its location along the frequency axis changes in various conditions of pump.
Furthermore it can be emphasized that based on my observation during the measurement, when
the revolution number was approaching 1500 [RPM], the noise of the turbomachine would
dramatically increase when the flow rate was at its maximum. Thus, we can indicate that the noise
was as result of high vibration. However, with the same revolution number (rotational speed) but
lower flow rate the noise was not that much.

Department of Hydrodynamic Systems
Page | 50
References
1. Jardine, A. K., Lin, D., & Banjevic, D. (2006). A review on machinery diagnostics and
prognostics implementing condition-based maintenance.Mechanical systems and signal
processing, 20(7), 1483-1510.
2. Comelius Scheffer “Pump Condition Monitoring Through Vibration Analysis” Pumps;
Maintenance, Design, and Reliability Conference, 2008.
3. Centrifugal Pumps 2nd ed. 2010 Edition, Springer ,ISBN 978-3-3-642-40113-8
4. Igor J Karassik and Ray Cartor, “Centrifugal pumps”, Tata McGraw Hill Book Company
– 2nd edition, 1960.
5. Jauregui, J. C. (2014). Parameter identification and monitoring of mechanical systems
under nonlinear vibration. Elsevier.
6. E. Oran Brigham, “The Fast Fourier Transform and its applications”, Prentice-Hall
International Editions – 1st edition 1988.
7. Entek IRD International “Introduction to vibration technology” Edition I, Jul 1984, Tata
McGraw hills.
8. Laggan PA. 1999. Vibration monitoring. IEE Colloquium on Understanding your
Condition Monitoring
9. Marcal RFM, Negreiros M, Susin AA, Kovaleski JL. 2000. Detecting faults in rotating
machines. J Instrumentation & Measurement Magazine 3
10. Wachel, J. C. (1992). Acoustic Pulsation Problems in Compressors and Pumps.
Engineering Dynamics Inc.
11. http://compton.chem.ox.ac.uk/index.php?title=research&topic=sono
12. http://www.rothpump.com/energy-efficient-condensate-return.html
13. http://www.hds.bme.hu/letoltesek/targyak/BMEGEVGAG02-
ENG/FM_1_CentrifugalPump.pdf
14. http://www.hds.bme.hu/mota/eng/mtp/mtp_2_Sampling_parameters.pdf

Department of Hydrodynamic Systems
Page | 51
Web Pages:
I declare that I used these web pages to understand more about vibration monitoring of centrifugal
pumps and their issues.
1. http://www.cecvp.com/latestnews/centrifugal-pump-vibration-readings/
2. http://www.whatispiping.com/piping-vibration
3. http://www.pumpsandsystems.com/topics/pumps/pumps/pump-vibration-monitoring-
basics?page=2
4. https://kcftech.com/smartdiagnostics/resources/application%20briefs/Application%20Wh
ite%20Paper%20Pumps%20web.pdf
5. http://petrowiki.org/Centrifugal_pumps
6. http://afec.biz/wp-content/uploads/2012/09/Monitoring-Centrifugal-Pump-Performance-
with-Vibration.pdf

Department of Hydrodynamic Systems
Page | 52
Appendix
The first part of my appendix is the numerical expression of FFT (Fast Fourier Transform) which
is the method to make the vibration spectrum in Lab view software. Vibration spectrum can be
represented in various different ways, of which the Fast Fourier Transform (FFT) is the most
popular. Some basic definition was mentioned in the definition part of this thesis, but for more
mathematic background, it is necessary to attached more definition which is going to be in
appendix (1).
Regarding to my supervisor advice, I used the lecture notes of a subject which was lectured by
Dr. Hegedus (Measurement technique of Process) at Budapest University of Technology and
Economics (BME).
I should say thank to Mr. Xabier Manceras Ibarra who documented them on a PDF file which
really helped me to use them. Also, I detected a book to complete the first part of this appendix
which is located in the references. (Reference [6])
1. FFT (Fast Fourier Transform)
A fundamental application of the FFT is to the multifaceted areas of transform analysis. By
developing the relationship between discrete and continues Fourier transforms, we can use the
discrete Fourier transform to yields a close approximation to the continues Fourier transform, we
expect significant usage of the FFT in computing Fourier transforms.
In applying the FFT to the computation of Fourier transforms, keep in mind the most important
concept that the discrete Fourier transform implies is periodicity in both the time and frequency
domains. If one always remembers that N sample values of the time function represent on period
of periodic function, the application of the FFT should result in few surprises.

Department of Hydrodynamic Systems
Page | 53
A. Curve fitting for Continuous functions
i) Let g(t) be an approximation function to another f(t) function:
Where fi(t) can be either:
• Periodic function: sin(𝑡) , cos(𝑡)
• Non periodic function:
To get the best of approximations we want the distance between both functions to be
minimal at all points, it being zero the optimal situation and so:

Department of Hydrodynamic Systems
Page | 54
ii) Let us say we now have vectors. What we would now want to
find is the so called orthogonal projection:
Best approximation would be that one where the difference between f and g is
minimal at all points:
As we have N equations for ai, then we will also have N unknowns in our system
of equations:
B. Continuous periodic Fourier series
Function: (𝑡); (𝑡) = (𝑡 + 𝑇) periodic Basis set:
.
. .
. .

Department of Hydrodynamic Systems
Page | 55
The Fourier approximation of the periodic function would be:
Where frequency of the function and T its period.
Inner product is defined as:
The cosine and sine series are orthogonal to each other, so:
Thus,
Integral average
It is important to note that the Fourier series can be used also in non-periodical functions.
C. Discontinuities in when using Fourier approximations:
If there is a discontinuity in the function, an error will appear at that point when applying the
discrete Fourier approximation. That error will remain regardless of the amount of harmonics
used. Here is an example of a discontinuous functions trying to be approximated using the
discrete Fourier transform with the use of (i) one, (ii) three, (iii) five, (iv) seven, (v) thirteen, (vi)
fifty and (vii) one hundred of harmonics, respectively:

Department of Hydrodynamic Systems
Page | 56
(i)
(ii)
(iii)
(iv)
(v)
(vi)
(vii
)

Department of Hydrodynamic Systems
Page | 57
Spectra:
Where:
Amplitude
phase
𝐴 𝑖 = √ 𝑎 𝑖 2 + 𝑏 𝑖
2

Department of Hydrodynamic Systems
Page | 58
D. Complex formalism:
𝑒𝑖𝜔 = cos(𝜔) + 𝑗 sin(𝜔) Function:
𝑓(𝑡) − 𝑅𝑒𝑎𝑙
Basis set: 𝑓𝑖 = 𝑒𝑗 𝜔𝑖𝑡 ; ; 𝑖 = −𝑁, … , 𝑁
Approximation:
Inner product:
Properties:
If f(t) is real then: 𝑐𝑖 = 𝑐− ̅ 𝑖
𝑎𝑖 = 𝑐𝑖 + 𝑐−𝑖
𝑏𝑖 = (𝑐𝑖 − 𝑐−𝑖)
E. Discrete trigonometry:
Function:
𝑓𝑖 = (𝑡𝑖) Basis
set:

Department of Hydrodynamic Systems
Page | 59
Inner product:
Approximation:
F. Discrete Fourier Transform (DFT):
This is the special case where the amount of measured point equals the number of basis:
𝑛 = 𝑁
There are no stability problems if the sampling rate is high enough, that is, if Δt is small enough.
Minor remark:
- Fast Fourier Transformation (FFT) can be used instead of the discrete Fourier method.
The fast Fourier transform is a simple discrete Fourier transform but very fast. The
reason is the amount of basis needed in each of the transforms:
𝐹𝐹𝑇~𝑁 · log (𝑁)
𝐷𝐹𝑇~𝑁2

Department of Hydrodynamic Systems
Page | 60
G. Shannon sampling theory / Aliasing:
When choosing a sampling frequency (∆𝑡 → 𝑓𝑠) for a given signal, a problem arises when the
chosen frequency is too small:
Let us say the original signal is the red one, which has a frequency of 10 Hz. By arbitrarily
choosing a sample frequency of 10 Hz we would get 10 different points that can be joined in an
infinite amount of ways, being the blue line the most simple of all. By doing so, the original
function has been alienated and as a result the new signal looks nothing like the original one.
This effect is called aliasing and it needs to be avoided. To avoid aliasing frequencies this is
what should be done when using the Fourier Transform:
𝑏𝑘 = 𝑒𝑗·2𝜋·𝑓𝑘· is periodic in 2π
𝑞 = −∞, … , −1, 0, 1, … , ∞
𝑡𝑖 = 𝑟∆𝑡 Equidistant, where 𝑟 = 0,1, …

Department of Hydrodynamic Systems
Page | 61
2. MATLAB CODE
function DataLoad
close all
figure(1); hold on;counter=0;
NumberOfMeasurement = 10;
ExcelFileName = 'Measure_excel.xlsx';
[Status, Sheets] = xlsfinfo(ExcelFileName);
SerialNumbers = xlsread(ExcelFileName, Sheets{NumberOfMeasurement},
'D2:D100');
FlowRate = xlsread(ExcelFileName, Sheets{NumberOfMeasurement},
'K2:K100');
Head = xlsread(ExcelFileName, Sheets{NumberOfMeasurement}, 'L2:L100');
Efficiency = xlsread(ExcelFileName, Sheets{NumberOfMeasurement},
'P2:P100');
IntesityMatrix=[];
for k=SerialNumbers(1):SerialNumbers(end);
SpectraFileName{k} = strcat( Sheets{NumberOfMeasurement}, '\',
Sheets{NumberOfMeasurement}, '_', num2str(k), '.txt' );
counter=counter+1;
FID = fopen(SpectraFileName{k});
HeaderLines = textscan(FID, '%s',8);
Data = textscan(FID, '%f %f');
X=Data{1}; Y=Data{2};
IntesityMatrix = [IntesityMatrix; Y'];
fclose(FID);
Z=ones(length(X),1)*FlowRate(k);
RightPlot = plot3(Z,X,Y);
set(gca,'Zscale','log','YDir','reverse');
grid on
box on
xlabel('Flow Rate','fontsize',14);
zlabel('Amplitude','fontsize',14);
ylabel('Frequency','fontsize',14);
[Amax(counter) Index]=max(Y);
Fmax(counter)=X(Index);
Qmax(counter)=Z(Index);
end

Department of Hydrodynamic Systems
Page | 62
RightPlot = plot3(Qmax,Fmax,Amax);
set(RightPlot,'DisplayName',SpectraFileName{k},'LineStyle','none','Mar
ker','.','MarkerSize',15);
set(gca,'Zscale','log','YDir','reverse');
hold off;
figure(2); hold on;
[xx,yy]=meshgrid(X,FlowRate);
size(IntesityMatrix)
surf(xx,yy,log(IntesityMatrix),'LineStyle','none');
ylabel('Flow Rate [m3/s]','fontsize',14);
xlabel('Frequency [Hz]','fontsize',14);
% It is optional to run the Figure 5, 4 and 3
figure(5); hold on;
plot(X,Y);
grid on
box on
xlabel('Frequency','fontsize',14);
ylabel('Amplitude','fontsize',14);
grid on
box on
figure(3); hold on;
plot(FlowRate,Efficiency);
xlabel('Flow Rate [m^3/s]','fontsize',14);
ylabel('Efficiency [-]','fontsize',14);
grid on
box on
figure(4); hold on;
plot(FlowRate,Head);
xlabel('Flow Rate [m^3/s]','fontsize',14);
ylabel('Head [m]','fontsize',14);
grid on
box on

Department of Hydrodynamic Systems
Page | 63
3. Evaluating the predicted height of Manometer 2
To be able to understand, how we made more mathematical the evaluation of the measurement
numbers and applying it to our measurement to make this processes easier, so it is necessary to
define this process in this thesis.
However, to make the measurement easier, a method was applied to predict the height of
Manometer 2 which is used to measure the flow rate. So by considering the fully open Throttle
valve which is the maximum flow rate and it’s readable as a maximum height on Manometer- 2.
Thus, we can evaluate our predicted height of Manometer 2 and by using this height, we can get
the flow rate in unit of [ m3/s].
∆ℎ2,𝑝𝑟𝑒𝑑𝑖𝑐𝑡𝑒𝑑 = (√∆ℎ2,𝑚𝑎𝑥
𝑁∙ (𝑖 − 1))
2
Where:
𝑖 = 1,2,3, … . . , 𝑛
𝑁 = 1,2,3, … . . , 𝑛: The number of measurement.
∆ℎ2,𝑚𝑎𝑥 : The maximum height of Manometer 2. (Fully open Throttle valve).

Department of Hydrodynamic Systems
Page | 64
4. Characteristic Curves
0
2
4
6
8
10
12
0 0.0005 0.001 0.0015 0.002 0.0025 0.003 0.0035 0.004
He
ad [
m]
Flow Rate [m3/s]
Characteristic Curves
n480
n600
n700
n800
n900
n1000
n1100
n1200
n1300
n1400
n1500
Poly. (n480)
Poly. (n600)
Poly. (n700)
Poly. (n800)
Poly. (n900)
Poly. (n1000)
Poly. (n1100)
Poly. (n1200)
Poly. (n1300)
Poly. (n1400)
Poly. (n1500)

Department of Hydrodynamic Systems
Page | 65
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0 0.0005 0.001 0.0015 0.002 0.0025 0.003 0.0035 0.004
Effi
cien
cy
Flow Rate [m3/s]
Efficiency of pump
n480
n600
n700
n800
n900
n1000
n1100
n1200
n1300
n1400
n1500
Poly. (n480)
Poly. (n600)
Poly. (n700)
Poly. (n800)
Poly. (n900)
Poly. (n1000)
Poly. (n1100)
Poly. (n1200)
Poly. (n1300)
Poly. (n1400)
Poly. (n1500)

Department of Hydrodynamic Systems
Page | 66
5. Some of Remaining Waterfall diagrams and Surface Plots
These are some more waterfall diagrams that can be used for further analysis. The revolution
speed of each of the diagram has been noted.
𝒏 = 𝟒𝟖𝟎 𝒓𝒎𝒑

Department of Hydrodynamic Systems
Page | 67
𝒏 = 𝟔𝟎𝟎 𝒓𝒎𝒑

Department of Hydrodynamic Systems
Page | 68
𝒏 = 𝟏𝟎𝟎𝟎 𝒓𝒎𝒑

Department of Hydrodynamic Systems
Page | 69
𝒏 = 𝟏𝟑𝟎𝟎 𝒓𝒎𝒑