Vibration Analysis and Modeling of an Off-Road Vibratory ...e vibratory roller is a type of the soil...
18
Research Article Vibration Analysis and Modeling of an Off-Road Vibratory Roller Equipped with Three Different Cab’s Isolation Mounts Vanliem Nguyen , 1,2 Jianrun Zhang , 1 Vanquynh Le, 2 and Renqiang Jiao 3 1 School of Mechanical Engineering, Southeast University, Nanjing, China 2 Faculty of Automotive and Power Machinery Engineering, ai Nguyen University of Technology, ai Nguyen, Vietnam 3 School of Mechanical and Electrical Engineering, Hubei Polytechnic University, Huangshi, China Correspondence should be addressed to Jianrun Zhang; [email protected] Received 12 December 2017; Revised 9 March 2018; Accepted 28 March 2018; Published 15 May 2018 Academic Editor: Edoardo Sabbioni Copyright © 2018 Vanliem Nguyen et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is study proposes a dynamic model of the vibratory roller interacting with the off-road deformed terrain to analyze the low- frequency performance of three different cab’s isolation mounts under the different operating conditions. In order to evaluate the ride comfort of the vibratory roller with the different cab’s isolation mounts, a three-dimensional nonlinear dynamic model is established. e power spectral density (PSD) and the weighted root mean square (RMS) of acceleration responses of the vertical driver’s seat, cab’s pitch, and roll vibrations are chosen as objective functions in the low-frequency range. Contrastive analysis of low-frequency vibration characteristics of the vibratory roller with the traditional rubber mounts, the hydraulic mounts, and the pneumatic mounts is carried out. Experimental investigations are also used to verify the accuracy of models. e research results show that the hydraulic mounts have an obvious effect on mitigating the cab vibration and improving the ride comfort in comparison with the traditional rubber mounts and the pneumatic mounts. 1. Introduction e vibratory roller is a type of the soil compactor which is mainly used in the field of the construction project on roads, railways, airports, and so on. ere is a combination of the static force of the vehicle and the dynamic force of the vibratory drum yielded by an eccentric mass rotating around the drum axis to compact soil, asphalt, and other materials in its work process [1–3]. erefore, the vibration dynamics of the vehicle are generated from two main sources: One is the wheels interacting the deformable terrain when the vehicle travels and the other is interactions between the drum/tyres and the elastoplastic terrain when the vehicle compacts the soil ground [3, 4]. Basic researches of the tyre-soſt soil interaction models, which were proposed by Bekker and Wong [5, 6], had been applied for researching the effect of soil deformation on off-road vehicle ride responses [4, 7, 8]. Besides, based on the theoretical approach of AS 2 TM, a model of elastic tyre-soil interaction was proposed to investigate the tyre dynamic behaviours on various soil deformations [9]. e dynamic pressure-sinkage relationship of a smooth rigid wheel-terrain interaction model was also studied from the literature and experimental observations [10]. In addition, the effect of the rough terrain surfaces and various off-road terrains had been researched for wheels- soil contact model of earth-moving machinery [8, 11, 12]. All the above results indicated that the vibration responses of interactive models are greatly influenced by deformable soil ground. e traditional interactive models between the drum and elastoplastic soil ground were carried out by Adam and Kopf, and Rinehart and Mooney [2, 13] to study the deformable properties of elastic-plastic soil ground in the actual operation conditions. Besides, the excitation force of the drum on the soil grounds was also controlled to enhance the performance of the compaction process [3]. e simula- tion and experiment methods of the vibratory roller-terrain interaction model with the optimal parameters of the wheels, the drum isolation mounts, and the drum mass were then examined by Li et al. [14]. However, all the above researches Hindawi Shock and Vibration Volume 2018, Article ID 8527574, 17 pages https://doi.org/10.1155/2018/8527574
Transcript of Vibration Analysis and Modeling of an Off-Road Vibratory ...e vibratory roller is a type of the soil...
-
Research ArticleVibration Analysis and Modeling of an Off-RoadVibratory Roller Equipped with Three Different Cab’sIsolation Mounts
Vanliem Nguyen ,1,2 Jianrun Zhang ,1 Vanquynh Le,2 and Renqiang Jiao3
1School of Mechanical Engineering, Southeast University, Nanjing, China2Faculty of Automotive and Power Machinery Engineering, Thai Nguyen University of Technology, Thai Nguyen, Vietnam3School of Mechanical and Electrical Engineering, Hubei Polytechnic University, Huangshi, China
Correspondence should be addressed to Jianrun Zhang; [email protected]
Received 12 December 2017; Revised 9 March 2018; Accepted 28 March 2018; Published 15 May 2018
Academic Editor: Edoardo Sabbioni
Copyright © 2018 VanliemNguyen et al.This is an open access article distributed under theCreativeCommonsAttribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This study proposes a dynamic model of the vibratory roller interacting with the off-road deformed terrain to analyze the low-frequency performance of three different cab’s isolation mounts under the different operating conditions. In order to evaluate theride comfort of the vibratory roller with the different cab’s isolation mounts, a three-dimensional nonlinear dynamic model isestablished. The power spectral density (PSD) and the weighted root mean square (RMS) of acceleration responses of the verticaldriver’s seat, cab’s pitch, and roll vibrations are chosen as objective functions in the low-frequency range. Contrastive analysisof low-frequency vibration characteristics of the vibratory roller with the traditional rubber mounts, the hydraulic mounts, andthe pneumatic mounts is carried out. Experimental investigations are also used to verify the accuracy of models. The researchresults show that the hydraulic mounts have an obvious effect on mitigating the cab vibration and improving the ride comfort incomparison with the traditional rubber mounts and the pneumatic mounts.
1. Introduction
The vibratory roller is a type of the soil compactor whichis mainly used in the field of the construction project onroads, railways, airports, and so on. There is a combinationof the static force of the vehicle and the dynamic force ofthe vibratory drum yielded by an eccentric mass rotatingaround the drum axis to compact soil, asphalt, and othermaterials in its work process [1–3]. Therefore, the vibrationdynamics of the vehicle are generated from twomain sources:One is the wheels interacting the deformable terrain whenthe vehicle travels and the other is interactions between thedrum/tyres and the elastoplastic terrain when the vehiclecompacts the soil ground [3, 4]. Basic researches of thetyre-soft soil interaction models, which were proposed byBekker andWong [5, 6], had been applied for researching theeffect of soil deformation on off-road vehicle ride responses[4, 7, 8]. Besides, based on the theoretical approach ofAS2TM, a model of elastic tyre-soil interaction was proposedto investigate the tyre dynamic behaviours on various soil
deformations [9].The dynamic pressure-sinkage relationshipof a smooth rigid wheel-terrain interaction model was alsostudied from the literature and experimental observations[10]. In addition, the effect of the rough terrain surfaces andvarious off-road terrains had been researched for wheels-soil contact model of earth-moving machinery [8, 11, 12]. Allthe above results indicated that the vibration responses ofinteractive models are greatly influenced by deformable soilground.
The traditional interactive models between the drumand elastoplastic soil ground were carried out by Adamand Kopf, and Rinehart and Mooney [2, 13] to study thedeformable properties of elastic-plastic soil ground in theactual operation conditions. Besides, the excitation force ofthe drum on the soil grounds was also controlled to enhancethe performance of the compaction process [3]. The simula-tion and experiment methods of the vibratory roller-terraininteraction model with the optimal parameters of the wheels,the drum isolation mounts, and the drum mass were thenexamined by Li et al. [14]. However, all the above researches
HindawiShock and VibrationVolume 2018, Article ID 8527574, 17 pageshttps://doi.org/10.1155/2018/8527574
http://orcid.org/0000-0001-8772-1086http://orcid.org/0000-0003-4411-570Xhttps://doi.org/10.1155/2018/8527574
-
2 Shock and Vibration
almost focus on exploring the soil compression efficiencywith wheels-terrain interactionmodels. Ride dynamics of thevibratory roller received only a little attention.
The low-frequency excitation arising from the wheels-terrain interaction is mostly transmitted to the driver viacab’s isolation mounts and seat’s suspension. Furthermore,vibrations in the low-frequency range of 0.5–10Hz causedby terrain roughness can lead to the main risk factors whichseriously affect the driver’s mental and physical health [15,16]. Consequently, cab’s isolation mounts are one of themost important factors to improve the driver’s ride comfort.The isolation mounts used for the vibratory roller cab aremostly equipped with the traditional rubber mounts withtheir stiffness and damping constants [3, 13, 14].The influenceof the design parameters of the cab rubber mounts on theride dynamics of the soil compactor was investigated viathe analytical and experimental methods [12], and theirparameters were then optimized to enhance the driver’s ridecomfort [17]; however, the vertical driver’s seat and cab’spitch vibrations are still great under operation conditions.Consequently, the traditional rubber mounts of the cab aredifficult to satisfy the driver’s ride comfort.
Nowadays, the cab’s isolation mounts of constructionequipment, industrial vehicle, and earth-moving machineryare being replaced by the increasing use of the hydraulicmounts to improve the ride comfort [18–20]. A six-degree-of-freedom (DOF) cab model of earth-moving machinerywith the hydraulic mounts involving quadratic damping wasalso investigated under the road roughness excitation withina frequency range below 10Hz [21]. The results showed thatthe root mean square (RMS) of acceleration responses andthe power spectral density (PSD) of displacement responsesof the cab’s mass centre are all reduced remarkably with thecomparison between hydraulic and rubbermounts. Althoughthe paper has not yet considered the influence of wheels-terrain interactions, however, the research results are anobvious basis for study and application of the hydraulicmounts into cab’s isolation mounts of machines working ondeformable soil grounds, especially the soil compactors.
Besides, the pneumatic suspension systems, which wereused in the suspension systems of the car, heavy truck, andrail vehicles to improve the ride dynamics and noise levels[22–24], were also investigated and applied for cab’s isolationmounts and the driver’s seat suspension to enhance the ridecomfort as well as the driver’s health and safety [25–27].The research results showed that the vehicle ride comfortwas obviously improved by using the pneumatic suspensionsystems. Moreover, the theory studies also showed that thepneumatic mounts used in vibration isolation mounts canresult in their stiffness being almost 10 times higher than thelowest stiffness at approximately 8Hz [28]; thus, this leads tothe application in a low-frequency range of vibration isolationsystems being necessary. Air springs have not only lowerresonance frequencies but also smaller overall length thanmechanical springs with equivalent properties [23]. However,the pneumatic mounts have not yet been studied to apply oncab’s isolation mounts of the off-road vehicles, especially thevibratory roller.
In this study, a three-dimensional nonlinear dynamicmodel of a single drum vibratory roller was establishedbased on Adam and Kopf ’s elastic-plastic soil model [2] andBekker hypothesis of the soft soil ground [5]. The vibrationexcitations consisted of the interactions of the drum/wheels-terrain roughness surface when the vehicle travelled on a softsoil ground and a low/high excitation frequency 28/35Hz ofthe drum when the vehicle compacted an elastoplastic soilground. Experimental investigations were used to validatethe models and verify their accuracy. Three different cab’sisolation mounts including the traditional rubber mounts,the hydraulic mounts, and the pneumatic mounts were,respectively, simulated. The performance of three differentisolationmounts was then evaluated through the accelerationPSD and the weighted RMS acceleration responses of thevertical driver’s seat, cab’s pitch, and roll vibrations in boththe frequency and time domains.
The innovation in this paper is that an 11-DOF vehicledynamics model which can fully reflect the pitch and rollvibrations of the cab is established. The vibration responsesof the vibratory roller under the low excitation frequency,especially the pitch and roll response of cab with threedifferent isolation mounts, are compared and analyzed. Theresults showed that the low-frequency and high-stiffnesscharacteristics of the hydraulic mounts have a good effect onisolating low-frequency vibration transmitted and control-ling the cab shaking of the vibratory roller.
2. Materials and Methods
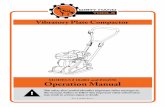
2.1. The Vibratory Roller Dynamic Model. As shown inFigure 1(a), the basic structure of the vibratory roller consistsof the rigid drum/wheels, the front/rear vehicle frame, thecab, and the seat. Moreover, the drum and the front frame areconnected by the rubber mounts, and the front frame and therear frame are linked by an articulation connection.The cab isconnected with the rear frame via the cab’s isolation mountswhich contains the traditional rubber mounts, the hydraulicmounts, and the pneumatic mounts as shown in Figures 1(b),1(c), and 1(d), respectively. In this study, three different cab’sisolation mounts are used for analyzing the low-frequencyperformance of the vibratory roller considering the interac-tion between wheels and off-road deformable terrain.
A three-dimensional nonlinear dynamic model with 11DOF of a single drum vibratory roller considering theinteraction between the drum/wheels and the deformableterrain is built as in Figure 2.
See Figure 2, where 𝑧𝑠 is the vertical motion at the driver’sseat, 𝑧𝑐, 𝜙𝑐, and 𝜃𝑐 are the vertical, the pitch, and the rollmotions at the cab, respectively, and those are described as𝑧rf , 𝜙rf , and 𝜃rf at the rear vehicle frame. The vertical and rollmotions of the front frame and the drum are described as 𝑧ff ,𝜃ff , and 𝑧𝑑, 𝜃𝑑. The mass of the driver’s seat, the cab, the frontframe, the engine and the rear frame, and the roller drum isdescribed as 𝑚𝑠, 𝑚𝑐, 𝑚ff , 𝑚rf , and 𝑚𝑑, respectively. 𝑙𝑢 and 𝑏Vare the longitudinal and lateral distances of the seat, the cab,and the vehicle (𝑢 = 1–8; V = 1–7). 𝑞𝑡𝑗 and 𝑞𝑑𝑗 are the terrainroughness surface at wheels and drum contacts. The driver’sseat suspension, drum mounts, and tyres are characterized
-
Shock and Vibration 3
to Frame
to CabAir bag
Surge pipe
to Air reservoir
13
Cab
WheelRear frame DrumFront frame
z
Rear frame
Cab
(a) Single drum vibratory roller
X
Y
Z
to Frame
to Cab
Damping plate Lower chamberAnnular orificeUpper chamber
Vibration isolation mounts
(b) Simple rubber mount
(c) Simple hydraulic mount
(d) Simple pneumatic mount
Main rubberOrifice
Rubber
zf
zc
Fkc
Fkc
Figure 1: Schematic of vibratory roller with three different cab’s isolation mounts.
qt1 qd1
cs
kt1
ks
zs
zc
mc
ms
zff
md
Fkc1Fkc3
zd
cd1kd1
ct1
mL@
l5l6
l7
l3
l4
l2
l1
l8
0
Fd
Mdy
c
L@
zL@
mff
(a) Side view
qd1 b4 b5 qd2
kd2 cd2
cs
cd1kd1
b2
b1
b3
ks
zs
zc
zd
ms
mc
md
zff
m
d
Fkc1 Fkc2
c
ff ff
(b) Front view
Figure 2: Lumped-parameter model.
by the linear stiffness coefficients 𝑘𝑠, 𝑘𝑑𝑗, 𝑘𝑡𝑗 and the lineardamping coefficients 𝑐𝑠, 𝑐𝑑𝑗, 𝑐𝑡𝑗, respectively (𝑗 = 1-2). V0 is thevehicle forward speed.
The vertical dynamic forces generated by the cab’s iso-lation mounts are described by 𝐹𝑘𝑐𝑖. Herein, superscript 𝑘denotes R, H, or P which is the abbreviation of traditionalrubber mounts, hydraulic mounts, or pneumatic mounts,respectively (𝑖 = 1–4).
The vertical dynamic force of the driver’s seat suspensionis described by
𝐹𝑠 = 𝑘𝑠 (𝑧𝑠 − 𝑧𝑐 − 𝑙1𝜙𝑐 − 𝑏1𝜃𝑐)+ 𝑐𝑠 (�̇�𝑠 − �̇�𝑐 − 𝑙1 ̇𝜙𝑐 − 𝑏1 ̇𝜃𝑐) . (1)
Moreover, the vertical dynamic forces 𝐹𝑑𝑗 at thearticulated-frame steered can be described by the verticalforce 𝐹𝑑, the rotation moment of pitch axis 𝑀𝑑𝑦, and therotation moment of roll axis𝑀𝑑𝑥 as follows:
𝐹𝑑 = 𝐹𝑑1 + 𝐹𝑑2,𝑀𝑑𝑦 = (𝐹𝑑1 + 𝐹𝑑2) 𝑙8,𝑀𝑑𝑥 = 𝐹𝑑1𝑏4 + 𝐹𝑑2𝑏5.
(2)
On the basis of Newton’s second law of motion, themotion equations of the driver’s seat, cab, and front/rearframe can be written as follows:
𝑚𝑠�̈�𝑠 = −𝐹𝑠,𝑚𝑐�̈�𝑐 = 𝐹𝑠 − (𝐹𝑘𝑐1 + 𝐹𝑘𝑐2 + 𝐹𝑘𝑐3 + 𝐹𝑘𝑐4) ,𝐼𝑐𝑦 ̈𝜙𝑐 = 𝐹𝑠𝑙1 + (𝐹𝑘𝑐1 + 𝐹𝑘𝑐2) 𝑙2 − (𝐹𝑘𝑐3 + 𝐹𝑘𝑐4) 𝑙3,𝐼𝑐𝑥 ̈𝜃𝑐 = 𝐹𝑠𝑏1 + (𝐹𝑘𝑐1 + 𝐹𝑘𝑐3) 𝑏2 − (𝐹𝑘𝑐2 + 𝐹𝑘𝑐4) 𝑏3,
-
4 Shock and Vibration
Rear frame
Cab
z kr crzrf
zc
(a) Traditional rubber mount
Cab
Rear frame
z kr cr cf
zrf
zc
(b) Hydraulic mount
w
Cab
M
Rear frame
zke
kv
zrf
zc
c
(c) Pneumatic mount
Figure 3: Lumped-parameter models of three cab’s isolation mounts.
𝑚rf �̈�rf = (𝐹𝑘𝑐1 + 𝐹𝑘𝑐2 + 𝐹𝑘𝑐3 + 𝐹𝑘𝑐4) − (𝐹𝑑 + 𝐹𝑡1 + 𝐹𝑡2) ,𝐼rf𝑦 ̈𝜙rf = (𝐹𝑘𝑐3 + 𝐹𝑘𝑐4) 𝑙4 − (𝐹𝑘𝑐1 + 𝐹𝑘𝑐2) 𝑙5 + 𝐹𝑑𝑙6
− (𝐹𝑡1 + 𝐹𝑡2) 𝑙7 +𝑀𝑑𝑦,𝐼rf𝑥 ̈𝜃rf = (𝐹𝑘𝑐2 + 𝐹𝑘𝑐4) 𝑏3 − (𝐹𝑘𝑐1 + 𝐹𝑘𝑐3) 𝑏2 + 𝐹𝑡1𝑏6 − 𝐹𝑡2𝑏7
−𝑀𝑑𝑥,𝑚ff �̈�ff = 𝐹𝑑1 + 𝐹𝑑2,𝐼ff𝑥 ̈𝜃ff = 𝐹𝑑1𝑏4 − 𝐹𝑑2𝑏5.
(3)
The system of the above differential equations can berepresented in the matrix form as follows:
[M] {Z̈} + [C] {Ż} + [K] {Z} = {F (𝑡)} , (4)where [M], [C], and [K] are (𝑚 × 𝑚) mass, damping, andstiffnessmatrices, respectively, {Z} is the (𝑚×1) displacementvector, {F(𝑡)} is the (𝑚× 1) exciting force vector, and𝑚 is thenumber of DOF (𝑚 = 9).2.2. Modeling of Three Cab’s Isolation Mounts
2.2.1. Mathematic Model of the Traditional Rubber Mounts.The traditional rubber mounts are widely used for cab’s iso-lation mounts of the vibratory roller to reduce the vibrations.The viscoelastic properties of the traditional rubber mountare mainly modeled by a linear stiffness 𝑘𝑟 and dampingcoefficient 𝑐𝑟, as shown in Figure 3(a). The correspondingdynamic force of themount 𝑖 of rubbermounts in the verticaldirection can be written as follows:
𝐹𝑅𝑐𝑖 = 𝑘𝑟𝑖 (𝑧𝑐𝑖 − 𝑧rf 𝑖) + 𝑐𝑟𝑖 (�̇�𝑐𝑖 − �̇�rf 𝑖) , (5)𝑧𝑐𝑖 = 𝑧𝑐 + (−1)𝛼 𝑙𝛼+1𝜙𝑐 + (−1)𝑖 𝑏𝛿𝜃𝑐,𝑧rf 𝑖 = 𝑧rf − 𝑙𝜐𝜙rf + (−1)𝑖 𝑏𝛿𝜃rf , (6)�̇�𝑐𝑖 = �̇�𝑐 + (−1)𝛼 𝑙𝛼+1 ̇𝜙𝑐 + (−1)𝑖 𝑏𝛿 ̇𝜃𝑐,�̇�rf 𝑖 = �̇�rf − 𝑙𝜐 ̇𝜙rf + (−1)𝑖 𝑏𝛿 ̇𝜃rf , (7)
where 𝑧𝑐𝑖, 𝑧rf 𝑖 and �̇�𝑐𝑖, �̇�rf 𝑖 are the displacements and thevelocities of the cab floor and the rear frame at mount 𝑖 of
the isolation mounts; when 𝑖 = 1-2 then 𝛼 = 1, 𝜐 = 5, and𝛿 = 𝑖 + 1; when 𝑖 = 3-4 then 𝛼 = 2, 𝜐 = 4, and 𝛿 = 𝑖 − 1.2.2.2. MathematicModel of the HydraulicMounts. It is shownin Figure 1(c) that the hydraulic mount consists of the mainrubber, a damping plate driven by the bolt, and a closed cham-ber filled with the fluid. The fluid flow in the upper-lowerchamber is derived by the transfer of damping plate throughthe annular orifice and the orifices. Assuming the inertialforces in the annular orifice and the orifices are very small,their values can be neglected. The dynamic behaviour ofthe fluid flow through the annular orifice and the orifices ismainly in the vertical direction 𝑧. Thus, the unequal pressurebetween two chambersΔ𝑝 can be computed by the sumof thepressure losses through the annular orifice (Δ𝑝𝑎 = 𝑐𝑎|�̇�𝑎|�̇�𝑎)[20] and the orifices (Δ𝑝𝑜 = 𝑐𝑜|�̇�𝑜|�̇�𝑜) [29] as follows:
Δ𝑝 = Δ𝑝𝑎 + Δ𝑝𝑜 = 𝑐𝑎 �̇�𝑎 �̇�𝑎 + 𝑐𝑜 �̇�𝑜 �̇�𝑜, (8)where �̇�𝑎 and �̇�𝑜 are the average flow velocities in the annularorifice and the orifices and 𝑐𝑎 and 𝑐𝑜 are the constantsdetermined by the geometric dimensions of the annularorifice and the orifices, respectively.
The flow 𝑄𝑐 in the closed chamber through the annularorifice and the orifices is described by the equations ofcontinuity
𝑄𝑐 = 𝐴𝑐�̇� = 𝐴𝑎�̇�𝑎,or 𝑄𝑐 = 𝐴𝑐�̇� = 𝐴𝑜�̇�𝑜, (9)
where 𝐴𝑐, 𝐴𝑎, and 𝐴𝑜 are the effects of the chamber, annularorifice, and orifices area, respectively, and �̇� is the relativevelocity between the cab floor and the rear frame.
Equation (8), thus, can be computed by �̇� as follows:Δ𝑝 = [𝑐𝑎 (𝐴𝑐𝐴𝑎)
2 + 𝑐𝑜 (𝐴𝑐𝐴𝑜)2] |�̇�| �̇�. (10)
With effect of the damping plate area𝐴𝑑 and the unequalpressure between two chambersΔ𝑝, the liquid damping force𝑓 is derived by
𝑓 = 𝐴𝑑Δ𝑝 = 𝑐𝑓 |�̇�| �̇�, (11)where 𝑐𝑓 = 𝐴𝑑[𝑐𝑎(𝐴𝑐/𝐴𝑎)2 + 𝑐𝑜(𝐴𝑐/𝐴𝑜)2] is the dampingconstant.
-
Shock and Vibration 5
Therefore, the hydraulic mount applied for cab’s isolationmounts can be modeled by the lumped-parameter modelshown in Figure 3(b). The corresponding dynamic force ofthe mount 𝑖 of hydraulic mounts in the vertical direction isdescribed by
𝐹H𝑐𝑖 = 𝑘𝑟𝑖 (𝑧𝑐𝑖 − 𝑧rf 𝑖) + 𝑐𝑟𝑖 (�̇�𝑐𝑖 − �̇�rf 𝑖)+ 𝑐𝑓𝑖 �̇�𝑐𝑖 − �̇�rf 𝑖 (�̇�𝑐𝑖 − �̇�rf 𝑖) , (12)
where 𝑧𝑐𝑖, 𝑧rf 𝑖 and �̇�𝑐𝑖, �̇�rf 𝑖 are derived in (6) and (7).2.2.3. Mathematic Model of the Pneumatic Mounts. Thepneumatic mount includes an air bag that is connected toan air reservoir via a surge pipe system. The structure ofa simple pneumatic mount is shown in Figure 1(d). Themechanical behaviour, mainly based on fluid dynamic andthermodynamic mechanisms, is often very complicated,which is determined by the characteristic parameters of thepressure, temperature, volume, mass, density, and energy ofthe air as well as the shape of the air bag.
According to the method of calculation of a simplepneumatic mount in [22], assume that air bag is deflectedin the vertical direction 𝑧. After the deflection, the new airbag volume 𝑉𝑏 and the new reservoir volume 𝑉𝑟 with thepolytropic process are
𝑉𝑏 = 𝑉𝑏0 − 𝐴𝑒𝑧 + 𝐴 𝑠𝑤,𝑉𝑟 = 𝑉𝑟0 − 𝐴 𝑠𝑤, (13)
where 𝑉𝑏0 and 𝑉𝑟0 are the initial volumes of the air bag andthe reservoir,𝐴𝑒 is the effective area of air bag,𝐴 𝑠 is the cross-section area of the pipeline, and 𝑤 is the displacement of airin surge pipe.
The GENSYS model of the pneumatic mount, as illus-trated in Figure 3(c), has polytropic gas state change. For thismodel, the static and viscous stiffness constants 𝑘𝑒 and 𝑘V andthe mass𝑀 can be, respectively, written by [23]
𝑘𝑒 = 𝑝0𝐴2𝑒𝜆𝑉𝑏0 + 𝑉𝑟0 ,𝑘V = 𝑘𝑒𝑉𝑟0𝑉𝑏0 ,𝑀 = 𝐴 𝑠𝑙𝑠𝜌(𝐴𝑒𝐴 𝑠
𝑉𝑟0𝑉𝑏0 + 𝑉𝑟0)2 ,
(14)
where 𝜆 is the polytropic rate (1 < 𝜆 < 1.4), 𝑝0 is the initialpressure in the air bag, 𝑙𝑠 is the length of the surge pipe, and𝜌 is the air density.
The nonlinear viscous damper 𝑐𝛽 is only related to thevelocity over the damper (𝑐𝛽), and the vertical viscous force𝐹V𝑧 is expressed by [30]
𝐹V𝑧 = 𝑘V (𝑧 − 𝑤) = 𝑐𝛽 |�̇�|𝛽 sign (�̇�) + 𝑀�̈�,𝑀�̈� = 𝑘V (𝑧 − 𝑤) − 𝑐𝛽 |�̇�|𝛽 sign (�̇�) . (15)
The relationship between the nonlinear damping 𝑐𝛽 andthe damping 𝑐𝑠 is described by
𝑐𝛽 = 𝑐𝑠 (𝐴𝑒𝐴 𝑠𝑉𝑟0𝑉𝑏0 + 𝑉𝑟0)
1+𝛽 , (16)in which 𝑐𝑠 = (1/2)𝜌𝐴 𝑠𝑐st = (1/2)𝜌𝐴 𝑠(𝑐fr + 𝑐en + 𝑐𝑐 + 𝑐𝑏),
where 𝑐st is total loss coefficient, 𝑐fr is the loss coefficient dueto friction, 𝑐en is the loss coefficient due to enlargement, 𝑐𝑐is the loss coefficient due to contraction, and 𝑐𝑏 is the losscoefficient due to bends in the pipe.
The dynamic force of pneumatic mount in the verticaldirection can be derived by
𝐹𝑃𝑐 = 𝑘𝑒𝑧 + 𝑘V (𝑧 − 𝑤) . (17)By combining (15) and (17), the corresponding dynamic
force of the mount 𝑖 of pneumatic mounts in the verticaldirection can be written as follows:
𝑀𝑖�̈�𝑖 = 𝑘V𝑖 (𝑧𝑐𝑖 − 𝑧rf 𝑖 − 𝑤𝑖) − 𝑐𝛽𝑖 �̇�𝑖𝛽𝑖 sign (�̇�𝑖) ,𝐹P𝑐𝑖 = 𝑘𝑒𝑖 (𝑧𝑐𝑖 − 𝑧rf 𝑖) + 𝑘V𝑖 (𝑧𝑐𝑖 − 𝑧rf 𝑖 − 𝑤𝑖) ,
(18)
where 𝑧𝑐𝑖 and 𝑧rf 𝑖 are also derived in (6) and (7).2.3. Dynamic Off-Road Vehicle and Deformable Soil Inter-action Models. In actual operation conditions, the drumand wheels often interact with the deformable soil grounds.Therefore, a rigid drum- and the elastic tyres-deformablesoil contact when the vehicle travels on the soft terrain anda rigid drum-elastoplastic soil interaction when the vehiclecompacts the elastoplastic soil ground are given to establishthe interactional models.
2.3.1. The Rigid Drum-Deformable Soil Contact Model. Theride vibration responses of vehicles are greatly influenced bythe rough terrain surfaces apart from the operating factorsand various designs. Accordingly, the random excitation onvarious off-road terrains of the wheel-soft terrain contactmodel [6], of the elastic tyre-soft terrain contact model [11],and of the rigid drum-elastic soil interaction model [17] isconcerned to evaluate the vehicle ride vibration, respectively.
In this study, a single rigid drum-deformable soil contactmodel with the terrain roughness surface is investigatedbased on the traditional model of Bekker and Wong [5, 6].When the drum traverses on a random terrain surface 𝑞(𝑡) ofa deformable terrain, under the effect of the static anddynamic loads of the drum, the terrain is then sunk 𝑧𝑜𝑎, asshown in Figure 4(a). The pressure 𝑝𝑔 and the shear stress𝜏𝑔 arising from the soil compression in the deformable arearegion (arc of 𝑜𝑎) thus impact contrarily the drum. Conse-quently, the vertical reaction force 𝐹𝑔 of the soil under thedrum is given by
𝐹𝑔 = ∫𝜃𝑎(𝑡)0
𝐵𝑑𝑝𝑔𝑟𝑑 cos 𝜃 𝑑𝜃 + ∫𝜃𝑎(𝑡)0
𝐵𝑑𝜏𝑔𝑟𝑑 sin 𝜃 𝑑𝜃= ∫𝑙(𝑡)
0𝐵𝑑𝑝𝑔𝑑𝑥 + ∫𝑙(𝑡)
0𝐵𝑑𝜏𝑔𝑥 (𝑟2𝑑 − 𝑥2)−1/2 𝑑𝑥,
(19)
-
6 Shock and Vibration
Δo
terrain surface
a.r.
zd
zx
zoaz0
x
rd Fd
md
l(t)
d
q(t)
0
a
gpg
a(t)q(t + x
0)q(t + x
0)
(a) The rigid drum-deformable soil
ob
terrain surface
a.r.
zt
z0
m
a
t
q(t)
t
r t
l1(t) l
x
2(t)
b pgg
a
0
zx
Ft
q(t + x0)
(b) The elastic tyre-deformable soil
Figure 4: The wheels-soil interaction models [7].
where 𝜃𝑎(𝑡) and 𝑙(𝑡) are the angle and length in the hori-zontal direction of the drum-soil contact which are generallychanged and depend on the rough terrain properties.
The pressure 𝑝𝑔 and the shear stress 𝜏𝑔 in (19) were givenby Bekker [5] as follows:
𝑝𝑔 = (𝑘𝑐𝑏 + 𝑘𝜑)𝑧𝑛𝑥,𝜏𝑔 = (𝑐 + 𝑝𝑔 tan𝜑) (1 − 𝑒−𝑗𝑑/𝐾) ,
(20)
where 𝑘𝑐 and 𝑘𝜑 are the soil stiffness coefficients for sink-age and internal friction, 𝑛 is the sinkage exponent, 𝑏 =min{𝐵𝑑, 𝑙(𝑡)} is the smaller dimension of the contact patchin which 𝐵𝑑 is the width of the drum, 𝑐 is the soil cohesioncoefficient, 𝜑 is the angle of the internal friction, 𝑗𝑑 =𝑟𝑑𝑠𝑑[𝜃𝑎(𝑡) − 𝜃] in which 𝑠𝑑 is the slip ratio of the drum, and𝐾is the shear deformation modulus.
Assuming a.r. is the average roughness line of the terrainsurface, thus, the sinking of the soil 𝑧𝑥 can be determined asfollows:
𝑧𝑥 = 𝑞(𝑡 + 𝑥V0) + 𝑧𝑜𝑎 − Δ= 𝑞(𝑡 + 𝑥
V0) + 𝑧𝑑 − 𝑧0 − (𝑟𝑑 − √𝑟2𝑑 − 𝑥2) ,
(21)
where 𝑟𝑑 is the radius of the drum, 𝑧0 is the static sinkage,𝑧𝑑 is the vertical displacement of the drum centre, and 𝑞(𝑡 +𝑥/V0) is the random excitation of an off-road terrain and it isdescribed in Section 2.3.4.
The vertical excitation forces 𝐹𝑑𝑗 arising due to the drummounts are described by
𝐹𝑑𝑗 = 𝑘𝑑𝑗 [𝑧ff − 𝑧𝑑 + (−1)𝑗 𝑏𝑗+3 (𝜃ff − 𝜃𝑑)]+ 𝑐𝑑𝑗 [�̇�ff − �̇�𝑑 + (−1)𝑗 𝑏𝑗+3 ( ̇𝜃ff − ̇𝜃𝑑)] . (22)
The motion equations of the rigid drum-soft terraincontact can be written as follows:
𝑚𝑑�̈�𝑑 = 𝐹𝑑1 + 𝐹𝑑2 − 𝐹𝑔 + 𝑚𝑑𝑔,𝐼𝑑𝑥 ̈𝜃𝑑 = 𝐹𝑑1𝑏4 − 𝐹𝑑2𝑏5. (23)
2.3.2.The Elastic Tyre-Deformable Soil Contact Model. Whenthe elastic tyre traverses on the deformable terrain, under theeffect of the static and dynamic loads of the wheel, the terrainis also sunk. Two deformation characteristics are presented inthe tyre-soil contact region. One is the deformation betweenthe tyre and the soil (the region of 𝑏𝑜𝑏) and the other is theunique soil (the region of 𝑏𝑎), as shown in Figure 4(b).Herein, 𝑧𝑡, 𝑧0, and 𝑧𝑥 are the vertical displacements of thetyre centre, the static deformation, and the sinkage of terrain,respectively. 𝑚𝑡, 𝜔𝑡, and 𝑟𝑡 are the mass, the angular velocity,and radius of the wheel, and𝐹𝑡 is the vertical dynamic force attyre centre.
The regions of 𝑏𝑜𝑏 and 𝑏𝑎 are assumed to be a straightline 𝑏𝑜𝑏 with the length of contact 𝑙1(𝑡) and an arc of 𝑏𝑎with the length of contact in the horizontal direction 𝑙2(𝑡),respectively. 𝑝𝑔 and 𝜏𝑔 arising in the deformable regions of𝑏𝑜𝑏 and 𝑏𝑎 are described by the vertical reaction forces ofterrain under the tire, 𝐹𝑧𝑔1 and 𝐹𝑧𝑔2 [7].
The vertical reaction force 𝐹𝑧𝑔1 in the region of 𝑏𝑜𝑏 iscalculated by
𝐹𝑧𝑔1 = 𝐹𝑧𝑝𝑔1 = 2𝐵𝑡 (𝑘𝑐𝑏 + 𝑘𝜑)∫𝑙1/2(𝑡)
0𝑧𝑛𝑥𝑑𝑥, (24)
where 𝑧𝑥 = 𝑞(𝑡 + 𝑥/V0) + 𝑧0 − 𝑧𝑡 and 𝑏 = min{𝐵𝑡, 𝑙1(𝑡)}.The vertical reaction force 𝐹𝑧𝑔2 in the region of 𝑏𝑎 is also
calculated as follows:
𝐹𝑧𝑔2 = 𝐹𝑧𝑝𝑔2 + 𝐹𝑧𝜏𝑔2= ∫𝑙1/2(𝑡)+𝑙2(𝑡)
𝑙1/2(𝑡)𝐵𝑡𝑝𝑔𝑑𝑥
+ ∫𝑙1/2(𝑡)+𝑙2(𝑡)𝑙1/2(𝑡)
𝐵𝑡𝜏𝑔𝑥 (𝑟2𝑡 − 𝑥2)−1/2 𝑑𝑥,(25)
where the pressure 𝑝𝑔 and the shear stress 𝜏𝑔 are determinedin (20), 𝑏 = min{𝐵𝑡, 𝑙2(𝑡)}, and 𝑗𝑡 = 𝑟𝑡𝑠𝑡[𝜃𝑎(𝑡) − 𝜃] in which 𝑠𝑡is the slip ratio of the tyre.
The total reaction force of the terrain is given by
𝐹𝑔 = 𝐹𝑧𝑔1 + 𝐹𝑧𝑔2. (26)
-
Shock and Vibration 7
s.e.e
kMJcM? kM?
zM?
zd
0Fd
Fe
Fg
(a) Loading phase
s.e.
kMJcM? kM?
zM?
zd
0Fd
Fe
Fg
(b) Unloading phase
mg
s.e.
kMJ
cM? kM?
zM?
zd
0Fd
Fe
md
me
(c) Drum-hop phase
Figure 5: The rigid drum and elastoplastic soil interaction model.
The vertical excitation forces𝐹𝑡𝑗 exerted on the rear frameare described as follows:
𝐹𝑡𝑗 + 𝐹𝑔𝑗 − 𝑚𝑡𝑗𝑔 = 0,𝐹𝑡𝑗= 𝑘𝑡𝑗 [𝑧rf − 𝑙7𝜙rf + (−1)𝑗 𝑏𝑗+5𝜃rf − 𝑧𝑔𝑗]+ 𝑐𝑡𝑗 [�̇�rf − 𝑙7 ̇𝜙rf + (−1)𝑗 𝑏𝑗+5 ̇𝜃rf − �̇�𝑔𝑗] ,
(27)
where𝑚𝑡𝑗 is the portion of total vehicle mass supported at thetyres and 𝑔 is the gravitational acceleration.2.3.3.TheRigidDrumand Elastoplastic Soil InteractionModel.The vibration response of the drum is arising not only fromthe self-excitation but also from the interaction between therigid drum and elastoplastic soil. In this study, based on theelastoplastic properties of the terrain [2], a lumped-parametermodel of the drum-soil interaction in the vertical directionis built which can be divided into three phases, as shown inFigure 5.
In Figure 5, 𝑧𝑑 and 𝑧se are the vertical motion of the drumand the elastic terrain deformation,𝑚 is the total mass of thefront frame and the drum, 𝑚𝑑 is the mass of the drum, 𝑘spand 𝑘se are the plastic and elastic stiffness constants, 𝑐se isthe elastic damping constant, s.e. is the abbreviation ofthe static equilibrium, 𝐹𝑒 = 𝑚𝑒𝑒𝜔2 sin𝜔𝑡 is the verticalprojection of the rotating eccentric mass 𝑚𝑒 in which 𝜔 isthe vibrator rotational velocity, and 𝑒 is the eccentricity of therotating mass. 𝐹𝑔 is the dynamic force yielded by the plasticdeformation of the soil surface layer or the elastoplasticdeformation of the soil subsequence layers which is writtenas follows:
𝐹𝑔 = 𝑘sp (𝑧𝑑 − 𝑧se) = 𝑘se𝑧se + 𝑐se�̇�se. (28)The motion equation of the drum and elastoplastic soil
interaction can be described by
𝑚𝑑�̈�𝑑 = 𝐹𝑑 − 𝐹𝑔 + 𝑚𝑒𝑒𝜔2 sin𝜔𝑡. (29)
According to Adam and Kopf [2], the elastoplastic prop-erty can be expressed by a plasticity factor 𝜀 and a soildamping to plasticity ratio 𝛾 as follows:
𝜀 = 𝑘sp(𝑘sp + 𝑘se) ,𝛾 = 𝑐se𝑘sp ,
(30)
where the mutation parameter 𝜀 is from 0 to 1. The value𝜀 = 0 achieved as 𝑘sp = 0 refers to purely plastic soil property,which degrades the loss of the drum-soil contact. The value𝜀 = 1 refers to an ideal elastic soil property achieved as 𝑘sp →∞. Over each cycle of the vibratory drum-soil interaction,there are two or three distinct phases, which are described asfollows.
(i) Loading Phase. As shown in Figure 5(a), this phase ischaracterized by the elastic and the plastic soil deformations.The drum moves downward while its compressive force isapplied to the terrain.The necessary conditions for this phaseare 𝐹𝑔 + 𝑚𝑔 > 0 and �̇�𝑑 > 0.
In order to describe the relation of 𝑧𝑑, 𝜀, and 𝛾, the third-order differential equation of the vertical roller drum-soilinteraction is calculated by
𝜀𝛾𝑚𝑑 ...𝑧𝑑 + 𝑚𝑑�̈�𝑑 = 𝜀𝛾�̇�𝑑 + 𝐹𝑑 − 𝜀𝑐se�̇�𝑑 + (𝜀 − 1) 𝑘sp𝑧𝑑+ 𝜀𝛾𝑚𝑒𝑒𝜔3 cos𝜔𝑡 + 𝑚𝑒𝑒𝜔2 sin𝜔𝑡. (31)
(ii) Unloading Phase. In this phase, the drum moves upwardwhile the drum-soil contact is retained, as illustrated inFigure 5(b). The soil recovers its elastic deformation, whilethe plastic deformation represents the soil compaction. Theplastic stiffness 𝑘sp is thus assumed to be infinite. Thenecessary conditions for this phase are 𝐹𝑔 + 𝑚𝑔 > 0 and�̇�𝑑 < 0.
𝑚𝑑�̈�𝑑 = 𝐹𝑑 − 𝑐se�̇�𝑑 + 𝑚𝑒𝑒𝜔2 sin𝜔𝑡. (32)(iii) Drum-Hop Phase. The drum continues upward motion,and the drum-soil contact is broken, as seen in Figure 5(c).
-
8 Shock and Vibration
−0.04
−0.02
0
0.02
0.04H
eigh
t (m
)
10 20 30 40 500Time (s)
(a) The off-road terrain profile
Terrain PSD
Medium
Good
Poor Very poor
10−8
10−6
10−4
10−2
100
Off-
road
PSD
(G2(T−
1)
100 10110−1
Frequency (Hz)
(b) Spectral densities
Figure 6: Generation of the off-road terrain roughness according to unpaved off-road classification.
The full elastic property of soil is thus recovered while theplastic stiffness of soil vanishes (𝑘sp = 0), which yields 𝜀 = 0.The necessary conditions for this phase are 𝐹𝑔 + 𝑚𝑔 = 0.
The drum-soil contact in this phase is broken and thestatic loads of the front frame and the drum are not balancedby any static reaction force of the terrain. The gravitycomponent 𝑚𝑔 is now considered in the motion equation ofdrum, rewritten by
𝑚𝑑�̈�𝑑 = 𝐹𝑑 + 𝑚𝑔 + 𝑚𝑒𝑒𝜔2 sin𝜔𝑡. (33)The motions of the drum and the elastoplastic soil
interaction can be described in (31), (32), and (33). Based onthe vertical motion of the drum 𝑧𝑑, the vertical excitationforces 𝐹𝑑 in (22) are then determined.2.3.4. The Random Excitation of the Off-Road Terrain. Thevehicle ride comfort is strongly influenced not only by thevibratory drum and the terrain deformation but also bythe rough terrain surfaces. The terrain behaviour underwheel-soil contact is nonlinear. Thus, the off-road vehiclesmust be performed in the frequency domain apart from thetraditional time domain to analyze the ride comfort. Off-roadterrain surface in the frequency domain is calculated usingthe PSD value [6, 31]. The spatial PSD of the road surfaceprofile 𝑆(Ω) is generally described as a function of thespatial frequency Ω/cyclem−1. The spectral density of off-road terrain is thus written in accordance with ISO proposal[32] over different spatial frequency ranges as
𝑆 (Ω) = 𝑆 (Ω0) ⋅ ( ΩΩ0)−𝑤0 , (34)
where 𝑤0 = 3 for Ω ≤ Ω0 and 𝑤0 = 2.25 for Ω > Ω0; thevalue 𝑆(Ω0) provides a measure for the random terrain withthe reference spatial frequencyΩ0 = 1/2𝜋 cycle m−1.
Table 1: The parameters of the unpaved off-road classification.
Classification Good Medium Poor Very poor𝑤0 2.25 2.25 2.14 2.14𝑆(Ω0) × 10−6/m3 cyc−1 199.8 973.9 3782.5 102,416
More specifically, assuming the vehicle travels with aforward speed V0, the off-road terrain irregularities in thetime domain can then be simulated by the series
𝑞 (𝑡) = 𝑁∑𝑖=1
𝑠𝑖 sin (𝑖Δ𝜔𝑡 + 𝜑𝑖) , (35)
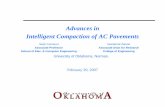
where 𝑁 is the number of intervals, 𝑠𝑖 = √2𝑆(𝑖Δ𝑛)Δ𝑛 isthe amplitude of each excitation harmonic in which 𝑆 is thetarget spectral density, Δ𝑛 = 2𝜋/𝐿, and 𝐿 is the length ofroad segment, 𝜑𝑖 is a random phase uniformly distributedbetween 0 and 2𝜋, and Δ𝜔 = Δ𝑛V0 is the fundamentaltemporal frequency. Mitschke [33] extended the spectraldensity ranges for the unpaved off-road classifications apartfrom the traditional asphalt road classifications, includingthe classification ranges from good to very poor, as listed inTable 1 and shown in Figure 6(b), and a desired terrainroughness can be yielded by choosing a value in the spectraldensity ranges.
In order to develop an off-road terrain roughness inputfor the vibratory roller close to the actual terrain condition,the simulation parameters used for generating the timedomain of a poor terrain roughness, as shown in Figure 6(a),are V0 = 1.67ms−1, 𝐿 = 84m, Δ𝑡 = 0.005 s, 𝑤0 = 2.14,and 𝑆(Ω0) = 3782.5 × 10−6m3 cycle−1. The PSD of the off-road terrain irregularity obtained from the time domain isdepicted in Figure 6(b). The frequency region of the inputsignal is mainly below 10Hz.
-
Shock and Vibration 9
Table 2:The reference parameters of a single drum vibratory roller.
Parameter Value𝑚𝑠/kg 85𝑚𝑐/kg 891𝑚ff /kg 2822𝑚fr/kg 4464𝑚𝑑/kg 4378𝐼𝑐𝑥/kgm2 560𝐼𝑐𝑦/kgm2 523𝐼rf𝑥/kgm2 3.1 × 103𝐼rf𝑦/kgm2 1.2 × 104𝐼ff𝑥/kgm2 1.9 × 103𝐼𝑑𝑥/kgm2 3.0 × 103𝑏1/m 0.55𝑏2/m 0.7𝑏3/m 0.68𝑏4/m 0.945𝑏5/m 0.945𝑙1/m 0.383𝑙2/m 0.1𝑙3/m 0.524𝑙4/m 0.136𝑙5/m 0.76𝑙6/m 0.9𝑙7/m 0.6𝑙8/m 1.5𝑘𝑠/Nm−1 1.2 × 104𝑘𝑑1,2/Nm−1 3.9 × 106𝑘𝑡1,2/Nm−1 0.5 × 106𝑐𝑠/Nsm−1 1.2 × 102𝑐𝑑1,2/Nsm−1 2.9 × 103𝑐𝑡1,2/Nsm−1 4.0 × 103𝑓/Hz 28/35𝐹0/MN 0.28/0.19
3. Results and Discussion
The performance of three different cab’s isolation mountsis evaluated under the interaction of wheels and off-roadterrain in both time and frequency domain. The referenceparameters of the vehicle are given in Table 2. In addition,for the lumped parameters of three cab’s isolation mounts, aslisted in Table 3, herein, the traditional rubber mounts andthemain rubber of hydraulicmounts are the same stiffness 𝑘𝑟𝑖and damping constants 𝑐𝑟𝑖 [21]. The static stiffness constants𝑘𝑒𝑖 of pneumatic mounts are also equivalently calculated withthe above two isolation mounts. The vehicle ride comfort isthe main goal for evaluation performance.
3.1. Evaluation Criteria. The performance of the vehiclesuspension systemwas evaluated by threemain indices in thetime domain, including the ride comfort, working space, androad holding characteristics. Among these three indices, theride comfort performance evaluated via the weighted RMSacceleration response was considered to be the most impor-tant index [21]. In addition, in the international standard ISO2631-1 [34], the acceleration PSD response was also applied
to estimate the effect of vibration on the endurance limit ofthe human body in the frequency domain. It was suggestedthat a low-frequency range of 4–10Hz for the vertical and of0.5–2Hz for the rotational vibrations seriously affected thedriver’s health and safety.
In this study, the performance of three different cab’sisolation mounts is evaluated through the acceleration PSDresponses and the weighted RMS acceleration responses ofthe vertical driver’s seat, cab’s pitch, and roll vibrations in boththe frequency and time domains. Thus, the smaller valuesof the acceleration PSD and the weighted RMS accelerationmean better ability of the corresponding isolation mounts.The expression of the weighted RMS acceleration response isdefined by
𝑎𝑘𝑤𝑙 = √ 1𝑇 ∫𝑇
0[𝑎𝑘𝑤𝑙 (𝑡)]2 𝑑𝑡, (36)
where superscript 𝑘 denotes R, H, or P of three cab’s isolationmounts, respectively, subscript 𝑙 refers to the vertical driver’sseat (𝑧𝑠), cab’s pitch (𝜙𝑐), or cab roll (𝜃𝑐) vibrations, 𝑎𝑘𝑤𝑙(𝑡) isthe acceleration response of R, H, or P in the 𝑙 as a functionof time, and 𝑇 = 50 s is the duration of the simulation.3.2. Experiment Results. In this section, comparisons are usedto validate the vibratory roller model with the cab rubbermounts and verify its accuracy through experiment inves-tigations. The experiment was carried out under the sameconditions of the dynamic simulationwhen the vehiclemovesand compacts an elastic-plastic soil ground. Three steps inexperiments were described as follows:
(i) Preparation step: instruments for the experimentincluding a single drum vibratory roller XS120, ICP�three-direction acceleration sensors, Belgium LMSdynamic test, and analysis system were used to mea-sure the vibration accelerations. The sensors werecalibrated and installed on the driver’s seat and thecab floor at four locations of isolation mounts. Thearrangement of measuring points and instrumenta-tions is shown in Figure 7.
(ii) Measurement step: the multipoint measurementmethod for the vehicle ride comfort was applied foranalysis and comparison. The process of measure-ment was performed under four different conditionssuch as at low/high excitation frequency 28/35Hz ofthe rigid drum when the vehicle compacted an origi-nal place and when the vehicle moved and compactedon an elastic-plastic soil ground at 0.83m s−1 forwardspeed.
(iii) Data extraction step: the data measurements werecarried out including the vertical acceleration on thedriver’s seat and the vertical accelerations at fourmeasurement points on the cab floor.
The acceleration responses of cab’s pitch and roll angleswere derived from themeasured vertical accelerations at fourmeasurement points on the cab floor by using kinematic
-
10 Shock and Vibration
Table 3: The lumped parameters of rubber (R), hydraulic (H), and pneumatic (P) mounts.
Parameter R and H P𝑘𝑟𝑖/Nm−1 𝑐𝑟𝑖/Nsm−1 𝑐𝑓𝑖/Ns2m−2 𝑘𝑒𝑖/Nm−1 𝑘V𝑖/Nm−1 𝑀𝑖/kg 𝑐𝛽𝑖/Ns2m−2Font-end mount 9.1 × 105 218 20 × 103 9.1 × 105 15.3 × 105 98 12.4 × 103Rear-end mount 1.2 × 105 29 4.5 × 103 1.2 × 105 2.01 × 105 33 10.7 × 103
Table 4: The lumped parameters of the Grenville loam.
Terrain type Moisture content/% 𝑛 𝑘𝑐/Nm−(𝑛+1) 𝑘𝜑/Nm−(𝑛+2) 𝑐/Pa 𝜑/∘Grenville loam 24 1.01 0.06 × 103 5880 × 103 3.1 × 103 29.8
Cab floor accelerometer The driver’s seataccelerometer
13
X
Y
Z
5
Signal processor and display the results
Rear frame accelerometer
Figure 7: Diagrammatic sketch of the experimental setup.
relations of the cab. Assuming small angular motions andnegligible contribution due to structure flexibility, thus, theacceleration responses of cab’s pitch and roll angles arecalculated by
̈𝜙𝑐 = �̈�𝑐2 − �̈�𝑐4𝑙𝑐 ,̈𝜃𝑐 = �̈�𝑐1 − �̈�𝑐2𝑏𝑐 ,
(37)
where �̈�𝑐𝑖 (𝑖 = 1–4) are the vertical accelerations at fourmeasurement points on the cab floor and 𝑙𝑐 and 𝑏𝑐 are thedistance between measurement points.
The acceleration PSD responses and the weighted RMSacceleration responses of the vertical driver’s seat, cab’s pitch,and roll vibrations are compared with the experimentalresults under the same condition of a low excitation fre-quency 28Hz of the drum when the vehicle moves andcompacts the elastic-plastic soil ground at 0.83m s−1 forwardspeed, as shown in Figures 8 and 9.
As plotted in Figure 8, comparison between simulationand experimental results shows that the simulation resultsalmost agree with the tests regarding the frequency of the var-ious peaks in the responses and the trend. Besides, the sim-ulation results of the weighted RMS acceleration responsesof the vertical driver's seat, cab’s pitch, and roll vibrationsalso are a small deviation of 10.13%, 11.36%, and 12.67% incomparisonwith theirmeasured results, as shown in Figure 9.It implies that the mathematical model of the vibratoryroller is accurate and feasible for low-frequency vibrationperformances analysis of cab’s isolation mounts.
3.3. Ride Comfort Analysis When the Vehicle Travels on theDeformable Terrain. The five types of soft terrain from LETEsand to Grenville loam had been given byWong [35] throughthe data of field measurement. In this study, the vehicle isassumed to be travelling on a terrain type of Grenville loam at1.67m s−1 forward speed. The Grenville loam’s parameters inTable 4 and its off-road terrain in Figures 6(a) and 6(b) are therandom excitation inputs. Simulations are then carried out tocompare the performances of three cab’s isolation mounts.
3.3.1. Frequency Acceleration Responses. The simulationresults of the acceleration PSD responses of the verticaldriver’s seat, cab’s pitch, and roll vibrations with three cab’sisolation mounts are plotted in Figure 10. The peaks ofacceleration PSD responses of vertical driver’s seat and cab’spitch vibrations shown in Figures 10(a) and 10(b) exhibit thatthe resonance frequencies occur at 0.79, 1.79, 2.09, 2.49, and8.39Hz with both traditional rubber mounts and hydraulicmounts and at 0.89, 1.8, 2.2, 2.6, and 8.39Hz with pneumatic
-
Shock and Vibration 11
ExperimentalSimulation
1 2 4 8 16 320.5Frequency (Hz)
10−4
10−3
10−2
10−1
100Ve
rtic
al ac
cele
ratio
n PS
D (G
2M−
3)
(a) Vertical driver’s seat
ExperimentalSimulation
1 2 4 8 16 320.5Frequency (Hz)
10−4
10−3
10−2
10−1
100
Pitc
h ac
cele
ratio
n PS
D (L
;>2M−
3)
(b) Cab’s pitch angle
ExperimentalSimulation
1 2 4 8 16 320.5Frequency (Hz)
10−5
10−4
10−3
10−2
10−1
100
Roll
acce
lera
tion
PSD
(L;>
2M−
3)
(c) Cab’s roll angle
Figure 8: The acceleration PSD responses under a low excitation frequency 28Hz of the drum.
mounts. Meanwhile, the resonance peaks of accelerationPSD responses of cab’s roll angle shown in Figure 10(c) occurat 2.09, 2.59, and 8.39Hz with both rubber mounts andhydraulic mounts and at 2.6 and 8.39Hz with pneumaticmounts. Particularly, the results show that hydraulic mountswith the nonlinear damping characteristics have almostno effect on the resonance frequencies in comparison withtraditional rubber mounts, which had been proved by Sunand Zhang [21]. However, at low-frequency range from 0.79to 2.6Hz, the resonance frequencies with pneumatic mountsare higher in comparison with both traditional rubber andhydraulic mounts in all three directions. This can be due tothe influence of the elastic stiffness of air bags which may bechanged and depended on the pressure, volume, mass, anddensity of the air in air bags.
Also at a low-frequency range of 0.79–2.6Hz, the resultsspecifically emphasize that traditional rubber mounts showmore resonance frequencies than those on the off-roadterrain in comparison with those on the rigid road whichonly show a resonance frequency near 2.1 Hz [7] or near2.77Hz [21]. It implies that the driver’s ride comfort is
strongly influenced by an off-road deformable terrain inlow-frequency region. Consequently, the maximum values ofacceleration PSD responses with three cab’s isolation mountsat 0.79–2.6Hz are given to compare the performances of threecab’s isolation mounts.
The maximum PSD values with three cab’s isolationmounts are listed in Table 5. The maximum PSD values ofthe vertical driver’s seat, cab’s pitch, and roll vibrations withhydraulic mounts are strongly reduced by 55.28%, 57.65%,and 35.16% compared with traditional rubbermounts.Mean-while, with pneumatic mounts, the maximum PSD values ofthe vertical driver’s seat and cab’s pitch vibrations are alsolower by 39.02% and 32.94%; however, those of cab’s rollvibration are higher by 7.14% in comparison with traditionalrubber mounts.
Besides, at the frequency range above 10Hz, Figure 10shows that the acceleration PSD responses with hydraulicmounts are all clearly lower in comparison with traditionalrubber mounts whereas their values with pneumatic mountsare all higher compared with traditional rubber mounts in allthree directions. It can be seen from the above analysis that
-
12 Shock and Vibration
Table 5: The maximum PSDs of the acceleration responses with three cab’s isolation mounts.
Parameters 𝑓/Hz Maximum PSD 𝑓/Hz Maximum PSDR H PVertical vibration/m2 s−3 2.09 1.23 0.55 2.6 0.75Pitch vibration/rad2 s−3 2.09 0.85 0.36 2.6 0.57Roll vibration/rad2 s−3 2.59 0.091 0.059 2.6 0.098
Table 6: The parameters of an elastoplastic ground deformation with a high density soil.
Road ground 𝜀 𝑘sp/Nm−1 𝑘se/Nm−1 𝑐se/Nsm−1Elastoplastic soil 0.87 283 × 106 42.3 × 106 37.1 × 103
Table 7: The resonance frequencies of three cab’s isolation mounts.
Isolation mounts Low excitation frequency, 28Hz, of the drum High excitation frequency, 35Hz, of the drum𝑓1 𝑓2 𝑓3 𝑓4 𝑓5 𝑓6 𝑓1 𝑓2 𝑓3 𝑓4 𝑓5 𝑓6R and H 1.69 1.89 2.09 2.49 5.69 8.59 1.69 1.89 2.09 2.49 5.69 8.59P 1.8 2.2 2.6 5.2 6.5 1.8 2.2 2.6 5.69 6.79
Degrees of freedom
ExperimentalSimulation
c czs0
0.2
0.4
0.6
0.8
1
Wei
ghte
d RM
S ac
cele
ratio
ns 0.79 m M−2
0.71 m M−2
0.44 rad M−2
0.39 rad M−2
0.150 rad M−20.131 rad M−2
Figure 9: The weighted RMS acceleration responses under a lowexcitation frequency 28Hz of the drum.
the improveddriver’s health and safetywith hydraulicmountsare especially evident in comparisonwith both the pneumaticand traditional rubber mounts in the low-frequency range.
3.3.2. The Weighted RMS Acceleration Responses. The resultsof the weighted RMS acceleration responses of the verti-cal driver’s seat, cab’s pitch, and roll vibrations with threedifferent isolation mounts are shown in Figure 11. Withtraditional rubber mounts, the weighted RMS values of thevertical driver’s seat and cab’s pitch vibrations are quite great,which can make the driver tired and uncomfortable [34];however, those of cab’s roll vibration are relatively small, andthese results are similarly the basis of measurements andsimulations results by Kordestani et al. and Quynh [12, 17].In addition, the weighted RMS values of the vertical driver’sseat, cab’s pitch, and roll vibrations with hydraulic mountsare, respectively, decreased by 32.48%, 26.31%, and 63.03% incomparison with traditional rubber mounts and by 13.11%,
16.24%, and 1.42% in comparison with pneumatic mounts.Thus, the driver’s ride comfort can be clearly improved byusing the hydraulic mounts.
3.4. Ride Comfort AnalysisWhen Vehicle Compacts the Elasto-plastic Soil Ground. The soil properties are changed duringthe interaction between wheels and soil ground. In the initialphase, the soil is relatively soft; thus, a continuous contactbetween the drum and soil can exist. The soil density thenbecomes higher after the repeated phase of the drum. And inthe final phase, the drum-soil contact could be broken dueto the interaction of the drum with the high-density soil(elastoplastic soil). The elastoplastic soil properties are rep-resented by three different values of the plasticity parameter𝜀, including a low density soil 𝜀 = 0.34, medium densitysoil 𝜀 = 0.72, and high-density soil 𝜀 = 0.87 [2]. However,the property of a low density soil (𝜀 = 0.34) is similar tothe property of a soft soil deformation which is simulated inSection 3.3. Thus, an elastoplastic soil concerned with amedium- or high-density soil is chosen in this part.
In the compaction condition, the vibratory roller invari-ably moves at very slow speed on the terrain deformation.Thus, the vehicle forward speed at 0.83m s−1 and an excita-tion frequency of 28/35Hz of the drum on a high-density soilground with parameters listed in Table 6 are chosen as theinput parameters of the model in Figure 5. Meanwhile, theelastic tyres are assumed to be moving on a soil deformationof the model in Figure 4(b). The vehicle model is thensimulated to evaluate the performance of three cab’s isolationmounts.
3.4.1. Frequency Acceleration Responses. The accelerationPSD responses with three cab’s isolationmounts at a low/highexcitation frequency 28/35Hz of the drum are given inFigures 12 and 13. The results of the resonance frequenciesare also listed in Table 7. Similarly, in the vehicle travellingcondition, the resonance peaks of the acceleration PSD
-
Shock and Vibration 13
Table 8: The maximum PSDs of the acceleration responses with three cab’s isolation mounts.
ParametersLow excitation frequency, 28Hz, of the drum High excitation frequency, 35Hz, of the drum
𝑓/Hz Maximum PSD 𝑓/Hz Maximum PSD 𝑓/Hz Maximum PSD 𝑓/Hz Maximum PSDR H P R H P
Vertical vibration/m2 s−3 2.09 0.68 0.37 1.8 0.65 2.09 0.54 0.32 1.8 0.51
Pitch vibration/rad2 s−3 2.09 0.42 0.19 1.8 0.48 2.09 0.42 0.18 1.8 0.35
Roll vibration/rad2 s−3 2.49 0.048 0.032 2.2 0.042 2.49 0.054 0.026 5.69 0.041
X: 0.79Y: 0.19 X: 1.79
Y: 0.83
X: 2.09Y: 1.23 X: 2.6
Y: 0.75
X: 8.39Y: 0.084
RHP
10−4
10−3
10−2
10−1
100
101
Vert
ical
acce
lera
tion
PSD
(G2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
(a) Vertical driver’s seat
RHP
0.5 1 2 4 8 16 32
X: 0.89Y: 0.24
X: 2.09Y: 0.85 X: 2.6
Y: 0.57X: 8.39Y: 0.18
X: 1.79Y: 0.26
Frequency (Hz)
10−4
10−3
10−2
10−1
100
101
Pitc
h ac
cele
ratio
n PS
D (L
;>2M−
3)
(b) Cab’s pitch angle
X: 2.09Y: 0.036
X: 2.6Y: 0.098 X: 8.39
Y: 0.072
10−5
10−4
10−3
10−2
10−1
100
Roll
acce
lera
tion
PSD
(L;>
2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
RHP
(c) Cab’s roll angle
Figure 10: The acceleration PSD responses under an excitation of the off-road terrain of Grenville loam.
responses with hydraulic rubber mounts are not changed incomparison with traditional rubber mounts. Meanwhile, theresonance frequencies with pneumatic mounts are slightlyhigher in comparison with both traditional rubber andhydraulic mounts. Besides, at a low-frequency range of1.69–2.49Hz, traditional rubber mounts also occur showresonance frequencies; thus, the ride comfort is strongly
influenced by an elastoplastic soil ground in low-frequencyregion.
In order to compare the performances of three cab’sisolationmounts, themaximumPSD values of three cab’s iso-lation mounts are also carried out in Table 8. The maximumPSD values of the vertical driver’s seat, cab’s pitch, and rollvibrations with hydraulic mounts are strongly reduced by
-
14 Shock and Vibration
Degrees of freedom
RHP
c czs0
0.5
1
1.5
2
Wei
ghte
d RM
S ac
cele
ratio
ns0.141 rad M−2
1.17 rad M−2
1.22 m M−21.06 m M−2
1.57 m M−2
0.139 rad M−20.376 rad M−2
0.98 rad M−21.33 rad M−2
Figure 11: The weighted RMS acceleration responses under an excitation of the off-road terrain of Grenville loam.
X: 1.8Y: 0.65
X: 2.09Y: 0.68
X: 2.49Y: 0.45
X: 5.69Y: 0.096
X: 8.59Y: 0.091
X: 28.18Y: 0.004
RHP
10−4
10−3
10−2
10−1
100
101
Vert
ical
acce
lera
tion
PSD
(G2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
(a) Vertical driver’s seat
RHP
X: 1.8Y: 0.48
X: 2.09Y: 0.42 X: 2.49
Y: 0.29X: 8.59Y: 0.074 X: 28.18
Y: 0.037
X: 18.09Y: 0.004
10−4
10−3
10−2
10−1
100
101Pi
tch
acce
lera
tion
PSD
(L;>
2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
(b) Cab’s pitch angle
RHP
X: 2.2Y: 0.042 X: 6.5
Y: 0.029
X: 8.59Y: 0.073
10−5
10−4
10−3
10−2
10−1
100
Roll
acce
lera
tion
PSD
(L;>
2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
(c) Cab’s roll angle
Figure 12: The acceleration PSD responses on a high-density soil ground at low excitation frequency 28Hz of the drum.
-
Shock and Vibration 15
X: 1.8Y: 0.51
X: 2.09Y: 0.54 X: 2.49
Y: 0.37
X: 5.69Y: 0.042
X: 8.59Y: 0.057
X: 35.18Y: 0.002
RHP
10−4
10−3
10−2
10−1
100
101Ve
rtic
al ac
cele
ratio
n PS
D (G
2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
(a) Vertical driver’s seat
X: 35.18Y: 0.012
X: 18.49Y: 0.002
X: 2.49Y: 0.24
X: 8.59Y: 0.046
X: 2.09Y: 0.42
X: 1.8Y: 0.35
RHP
10−4
10−3
10−2
10−1
100
101
Pitc
h ac
cele
ratio
n PS
D (L
;>2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
(b) Cab’s pitch angle
X: 2.49Y: 0.054 X: 5.69Y: 0.041
X: 8.59Y: 0.058
RHP
10−5
10−4
10−3
10−2
10−1
100
Roll
acce
lera
tion
PSD
(L;>
2M−
3)
1 2 4 8 16 320.5Frequency (Hz)
(c) Cab’s roll angle
Figure 13: The acceleration PSD responses on a high-density soil ground at high excitation frequency 35Hz of the drum.
45.58%, 54.76%, and 33.33% at a low excitation frequency28Hz and by 40.74%, 57.14%, and 51.85% at a high excitationfrequency, 35Hz, in comparison with traditional rubbermounts. Meanwhile, with pneumatic mounts, the maximumPSD values of the vertical driver’s seat and cab’s roll vibrationsare also smaller by 4.41% and 12.50%, and those of cab’spitch vibration are higher by 12.50% at a low excitationfrequency 28Hz; however, all the maximum PSD valuesare, respectively, lower by 5.55%, 16.67%, and 24.07% at ahigh excitation frequency, 35Hz, comparable with traditionalrubber mounts.
At the frequency range above 10Hz, the resonance peaksof the acceleration PSD responses in Figures 12 and 13 showthat the resonance frequencies with cab’s isolation mountsalso occur at 28.18Hz or 35.18Hz in all three directions.This can be due to the resonance of an excitation frequency28/35Hz of the vibratory drum. In addition, the resonancefrequency of the acceleration PSD responses clearly appearsat 18.49Hz in both graphs of Figures 12 and 13 whereasthis resonance frequency does not occur in the graph of
Figure 10, especially with traditional rubber mounts. Thisparticularity may be due to the effect of the soil stiffnesswith the high-density soil ground. Besides, the results of theacceleration PSD responses with hydraulic mounts are allclearly lower whereas their values with pneumatic mountsare all strongly enhanced comparable with traditional rubbermounts in three directions, especially at a high excitation fre-quency 35Hz.Consequently, all the above analysis results alsosuggest that the driver’s health and safety with hydraulicmounts are obviously improved in comparison with both thepneumatic and traditional rubbermounts on elastoplastic soilground.
3.4.2.TheWeighted RMSAcceleration Responses. Figure 14(a)shows that, at a low excitation frequency, 28Hz, of thedrum, the weighted RMS values of the vertical driver’sseat and cab’s pitch vibrations with pneumatic mounts areenhanced by 4.05% and 4.88% in comparisonwith traditionalrubber mounts. Thus, pneumatic mounts have a little effect
-
16 Shock and Vibration
RHP
0
0.2
0.4
0.6
0.8
1W
eigh
ted
RMS
acce
lera
tions
Degrees of freedomc czs
0.41 rad M−2
0.74 m M−2
0.71 m M−2
0.32 rad M−2
0.65 m M−2
0.39 rad M−2
0.085 rad M−20.085 rad M−20.131 rad M−2
(a) Under a low excitation frequency, 28Hz, of the drum
RHP
Degrees of freedomc czs
0
0.2
0.4
0.6
0.8
1
Wei
ghte
d RM
S ac
cele
ratio
ns
0.63 m M−2
0.65 m M−2
0.51 m M−2
0.32 rad M−20.24 rad M−20.33 rad M−2
0.088 rad M−20.061 rad M−20.110 rad M−2
(b) Under a high excitation frequency, 35Hz, of the drum
Figure 14: The weighted RMS acceleration responses on a high-density soil ground.
on improving the driver’s ride comfort. Meanwhile, withhydraulic mounts, their weighted RMS values are all, respec-tively, smaller by 8.45%, 17.95%, and 35.11% compared withtraditional rubber mounts. Therefore, the driver’s ride com-fort is clearly improved by using hydraulic mounts.
Besides, Figure 14(b) also shows that, at a high excitationfrequency, 35Hz, the weighted RMS values of the verticaldriver’s seat and cab’s pitch vibrationswith pneumaticmountsare slightly reduced by 3.07% and 3.03% in comparison withtraditional rubber mounts. Contrary to that with pneumaticmounts, their weighted RMS values with hydraulic mountsare all strongly decreased by 21.53%, 27.27%, and 45.54%compared with traditional rubber mounts.
In addition, the driver’s ride comfort is also significantlyinfluenced by the excitation frequencies of the vibratorydrum. As shown in Figures 14(a) and 14(b), the weightedRMS acceleration responses of the vertical driver’s seat, cab’spitch, and roll vibrations at a high excitation frequency, 35Hz,comparable with a low excitation frequency, 28Hz, are all,respectively, lower by 8.45%, 15.38%, and 16.03% with tradi-tional rubber mounts, by 14.86%, 21.95%, and −3.41% withpneumatic mounts, and by 21.54%, 25%, and 28.23% withhydraulic mounts. Therefore, all the above analysis resultsshow that the driver’s ride comfort can be improved clearlywith hydraulicmounts when the vehiclemoves and compactsan elastoplastic soil ground in low-frequency region.
4. Conclusions
Modeling and low-frequency performance analysis of anoff-road vibratory roller equipped with three different cab’sisolationmounts are addressed in thiswork.Theperformanceof three cab’s isolationmounts is evaluated through the accel-eration PSD responses and the weighted RMS accelerationresponses of the vertical driver’s seat, cab’s pitch, and the rollvibrations in both the frequency and the time domains.
The results show that the maximum PSD values of thevertical driver’s seat, cab’s pitch, and roll vibrations with thehydraulic mounts are strongly reduced by 55.28%, 57.65%,and 35.16% compared with traditional rubber mounts.Besides, the weighted RMS values of the vertical driver’sseat, cab’s pitch, and roll vibrations with hydraulic mountsare also, respectively, lower by 13.11%, 16.24%, and 1.42% incomparison with pneumatic mounts when the vehicle travelson a deformable terrain.
When the vehicle moves and compacts an elastoplasticsoil ground, with hydraulicmounts, the weighted RMS valuesof the vertical driver’s seat, cab’s pitch, and roll vibrationsare greatly decreased by 8.45%, 17.95%, and 35.11% at a lowexcitation frequency, 28Hz, of the drum, and theirmaximumPSD values are strongly reduced by 45.58%, 54.76%, and33.33% at a low excitation frequency, 28Hz and by 40.74%,57.14%, and 51.85% at a high excitation frequency, 35Hz,comparable with the traditional rubber mounts.
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper.
Acknowledgments
This study is supported by the Science and TechnologySupport Program of Jiangsu, China (no. BE2014133) and theProspective Joint Research Program of Jiangsu, China (no.BY2014127-01).
References
[1] D. Pietzsch and W. Poppy, “Simulation of soil compaction withvibratory rollers,” Journal of Terramechanics, vol. 29, no. 6, pp.585–597, 1992.
-
Shock and Vibration 17
[2] D. Adam and F. Kopf, “Theoretical analysis of dynamicallyloaded soils,” in Proceedings of the European Workshop Com-paction of Soils and Granular Materials, pp. 207–220, Paris,France, 2000.
[3] R. Anderegg and K. Kaufmann, “Intelligent compaction withvibratory rollers feedback control systems in automatic com-paction and compaction control,” Transportation ResearchRecord, no. 1868, pp. 124–134, 2004.
[4] K. Tateyama, S. Ashida, R. Fukagawa, and H. Takahashi,“Geomechatronics - Interaction between ground and construc-tion machinery and its application to construction robotics,”Journal of Terramechanics, vol. 43, no. 3, pp. 341–353, 2006.
[5] M. Bekker, Introduction to Terrain-Vehicle Systems, University ofMichigan Press, Ann Arbor, Mich, USA, 1969.
[6] J. Wong, Theory of Ground Vehicles, John Wiley & Sons, NewYork, NY, USA, 2001.
[7] X. Zhang,Modelling, simulation and optimization of ride comfortfor off road articulated dump trucks [Ph.D. thesis], SoutheastUniversity, 2010.
[8] A. Pakowski and D. Cao, “Effect of soil deformability onoff-road vehicle ride dynamics,” SAE International Journal ofCommercial Vehicles, vol. 6, no. 2, pp. 362–371, 2013.
[9] C. Harnisch, B. Lach, R. Jakobs, M. Troulis, and O. Nehls,“A new tyre-soil interaction model for vehicle simulation ondeformable ground,” Vehicle System Dynamics, vol. 43, pp. 384–394, 2005.
[10] R. A. Irani, R. J. Bauer, and A. Warkentin, “Dynamic wheel-soil model for lightweight mobile robots with smooth wheels,”Journal of Intelligent & Robotic Systems, vol. 71, no. 2, pp. 179–193, 2013.
[11] S. Park, A. A. Popov, and D. J. Cole, “Influence of soil deforma-tion on off-road heavy vehicle suspension vibration,” Journal ofTerramechanics, vol. 41, no. 1, pp. 41–68, 2004.
[12] A. Kordestani, S. Rakheja, P. Marcotte, A. Pazooki, and D. Juras,“Analysis of ride vibration environment of soil compactors,”SAE International Journal of Commercial Vehicles, vol. 3, no. 1,pp. 259–272, 2010.
[13] R. V. Rinehart and M. A. Mooney, “Instrumentation of a rollercompactor to monitor vibration behavior during earthworkcompaction,”Automation in Construction, vol. 17, no. 2, pp. 144–150, 2008.
[14] J. Li, Z. Zhang, H. Xu, and Z. Feng, “Dynamic characteristicsof the vibratory roller test-bed vibration isolation system:Simulation and experiment,” Journal of Terramechanics, vol. 56,pp. 139–156, 2014.
[15] M. Griffin, Handbook of Human Vibration, Academic Press,London, UK, 1990.
[16] J. De Temmerman, K. Deprez, I. Hostens, J. Anthonis, and H.Ramon, “Conceptual cab suspension system for a self-propelledagricultural machine - part 2: operator comfort optimisation,”Biosystems Engineering, vol. 90, no. 3, pp. 271–278, 2005.
[17] V. Quynh, Vibration study and control for cab of vibratory roller[Ph.D. thesis], Southeast University, 2013.
[18] P. Lee, J. Vogt, and S. Han, “Application of hydraulic bodymounts to reduce the freeway hop shake of pickup trucks,” SAETechnical Papers 2009-01-2126, 2009.
[19] T. Higuchi and K. Miyaki, “Work machine with operatorscabin,” Tech. Rep., 1999, U.S. Patent No. 5984036.
[20] S. Jiao, Y. Wang, L. Zhang, and H. Hua, “Shock wave character-istics of a hydraulic damper for shock test machine,”MechanicalSystems and Signal Processing, vol. 24, no. 5, pp. 1570–1578, 2010.
[21] X. Sun and J. Zhang, “Performance of earth-moving machinerycab with hydraulic mounts in low frequency,” Journal of Vibra-tion and Control, vol. 20, no. 5, pp. 724–735, 2014.
[22] P. Sundvall, “Comparisons between predicted and measuredride comfort in trains-a case study on modeling,” TRITAFKTReport, Division of Railway Technology, Department of VehicleEngineering, Royal Institute of Technology, Stockholm, Swe-den, 2001.
[23] M. Presthus, Derivation of air spring model parameters for trainsimulation [M.S. thesis], Lulea University of Technology, 2002.
[24] H. J. Abid, J. Chen, and A. A. Nassar, “Equivalent air springsuspension model for quarter-passive model of passenger vehi-cles,” International Scholarly Research Notices, vol. 2015, ArticleID 974020, pp. 1–6, 2015.
[25] I. Hostens, K. Deprez, and H. Ramon, “An improved designof air suspension for seats of mobile agricultural machines,”Journal of Sound and Vibration, vol. 276, no. 1-2, pp. 141–156,2004.
[26] J. Yan, Z. Yin, X. Guo, and C. Fu, “Fuzzy control of semi-activeair suspension for cab based on genetic algorithms,” SAETechnical Papers 2008-01-2681, 2008.
[27] G. Tang, H. Zhu, Y. Zhang, and Y. Sun, “Studies of air springmathematical model and its performance in cab suspensionsystem of commercial vehicle,” SAE Technical Papers, vol. 2015,no. 4, pp. 341–348, 2015.
[28] C. Harris and A. Piersol,Harris’ Shock and Vibration Handbook,McGraw-Hill, New York, NY, USA, 5th edition, 2002.
[29] T. Ushijima and T. Dan, “Nonlinear B.B.A. for predicting vibra-tion of vehicle with hydraulic engine mount,” SAE TechnicalPapers 860550, 1986.
[30] M. Berg, “A three-dimensional air spring model with frictionand orifice damping,” in Proceedings of the 16th IAVSD Sympo-sium,The Dynamics of Vehicles on Roads And on Tracks, vol. 33,pp. 528–539, Pretoria, South Africa, 1999.
[31] J. D. Robson, “Road surface description and vehicle response,”International Journal of Vehicle Design, vol. 1, no. 1, pp. 25–35,1979.
[32] International Organization for Standardization, “Reportingvehicle road surface irregularities,” Tech. Rep. ISO/TC108/SC2/WG4 N57, Thieme Medical Publishers, Stuttgart, Germany,1982.
[33] M. Mitschke, Dynamik der Kraftfahrzeuge, Springer-Verlag,Berlin, Germany, 1972.
[34] International Organization for Standardization, “Mechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2: General requi,” Tech. Rep. ISO 2631-1:1997, ISO, Geneva, Switzerland, 1997.
[35] J. Y. Wong, “Data processing methodology in the character-ization of the mechanical properties of terrain,” Journal ofTerramechanics, vol. 17, no. 1, pp. 13–41, 1980.
-
International Journal of
AerospaceEngineeringHindawiwww.hindawi.com Volume 2018
RoboticsJournal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Shock and Vibration
Hindawiwww.hindawi.com Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwww.hindawi.com
Volume 2018
Hindawi Publishing Corporation http://www.hindawi.com Volume 2013Hindawiwww.hindawi.com
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwww.hindawi.com Volume 2018
International Journal of
RotatingMachinery
Hindawiwww.hindawi.com Volume 2018
Modelling &Simulationin EngineeringHindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Navigation and Observation
International Journal of
Hindawi
www.hindawi.com Volume 2018
Advances in
Multimedia
Submit your manuscripts atwww.hindawi.com
https://www.hindawi.com/journals/ijae/https://www.hindawi.com/journals/jr/https://www.hindawi.com/journals/apec/https://www.hindawi.com/journals/vlsi/https://www.hindawi.com/journals/sv/https://www.hindawi.com/journals/ace/https://www.hindawi.com/journals/aav/https://www.hindawi.com/journals/jece/https://www.hindawi.com/journals/aoe/https://www.hindawi.com/journals/tswj/https://www.hindawi.com/journals/jcse/https://www.hindawi.com/journals/je/https://www.hindawi.com/journals/js/https://www.hindawi.com/journals/ijrm/https://www.hindawi.com/journals/mse/https://www.hindawi.com/journals/ijce/https://www.hindawi.com/journals/ijap/https://www.hindawi.com/journals/ijno/https://www.hindawi.com/journals/am/https://www.hindawi.com/https://www.hindawi.com/