Vibration analyis of discrete MDOF systems7 Remarks •Equations of motion for MDOF systems are...
45
1 Dr C S Manohar Department of Civil Engineering Professor of Structural Engineering Indian Institute of Science Bangalore 560 012 India [email protected] Vibration analyis of discrete MDOF systems
Transcript of Vibration analyis of discrete MDOF systems7 Remarks •Equations of motion for MDOF systems are...
-
111
Dr C S ManoharDepartment of Civil Engineering
Professor of Structural EngineeringIndian Institute of ScienceBangalore 560 012 India
Vibration analyis of discrete MDOF systems
-
2
Preliminaries
Nature of equations of motionInput - output relations in time domainInput - output relations in frequency domainForced vibration analysis using modal expansion
-
3
A rigid bar supported on two springs
1 1 1 2 22
O : Elastic centre O : Centre of gravity
k L k L
Two DOF-s1 Translation1 Rotation
1 2 1 2l l L L L
-
4
1 1 2 2
2 2 2 1 1 1
1 2 1 1 2 22 2
1 1 2 2 1 1 2 2
0
0
00
0
my k y l k y l
I k y l l k y l l
k k k l k lm y yk l k l k l k lI
is diagonal and is non-diagonalM KStatic coupling
-
5
1 22 2
1 1 2 2
00
0k km me z z
k L k Lme m
is non-diagonal and is diagonalM KInertial coupling
-
6
1 1 2 22
1 2 2
0m ml k k k Lx x
ml m k L k L
is non-diagonal and is non-diagonalM KStatic and inertial coupling
-
7
Remarks
•Equations of motion for MDOF systems are generally coupled
•Coupling between co-ordinates is manifest in the form of structural matrices being nondiagonal
•Coupling is not an intrinsic property of a vibrating system. It is dependent upon the choice of the coordinate system. This choice itself is arbitrary.
•Equations of motion are not unique. They depend upon the choice of coordinate system.
-
8
Remarks (continued)
•The best choice of coordinate system is the one in which the coupling is absent. That is, the structural matrices are all diagonal.
•These coordinates are called the natural coordinates for the system. Determination of these coordinates for a given system constitutes a major theme in structural dynamics. Theory of ODEs and linear algebra help us.
-
9
u t u t
1m
2m
3m
1k
2k
3k
1z t
2z t
3z t
A building frame under support motion
-
10
1 1 1 1 2 1 2 1 1 2 1 2
2 2 2 2 1 3 2 3 2 2 1 3 2 3
3 3 3 3 2 3 3 2
0
0
0
m z c z u c z z k z u k z z
m z c z z c z z k z z k z z
m z c z z k z z
-
11
1 1
2 2
3 3
1 1 1 1 2 1 2 1 1 2 1 2 1
2 2 2 2 1 3 2 3 2 2 1 3 2 3 2
3 3 3 3 2 3 3 2 3
x z ux z ux z u
m x c x c x x k x k x x m u
m x c x x c x x k x x k x x m u
m x c x x k x x m u
1 1 1 2 2 1 1 2 2 1
2 2 2 2 3 3 2 2 2 3 3 2
3 3 3 3 3 3 3 3
0 0 0 00 00 0 0 0
m x c c c x k k k xm x c c c c x k k k k x
m x c c x k k x
1
2
3
0 0 1 0 0 1
0 0 1
mm u
m
-
12
gx t gy t
A frame with asymetric plan under multi-componentsupport motions
-
13
x t
y t
t
O
O
-
14
-
15
-
16
1 11 4 2 3
1 2 3 4
1 14 3 1 2
1 2 3 4
1 2 3
4
( ) ( )2 2 2
( ) ( )2 2 2
( / 2)( / 2),
s s s s sS
s s s
s s s s sS
s s s
a a
s s S s s s
b b b b bm m m m mx
tb d m m m m
d d d d dm m m m my
tb d m m m mm m m A hm A h m tb d
-
17
34332112
;12
hIE
kh
IEkkk ssaa
22
22
22
22
21
21
22
21
21
2222
22223
2)(
2
2212
223
sssalaassaa
sssssss
sss
ssaassscolumnsslab
rhArhAyx
hAyxyxyx
hA
dy
bxdtbdb
dtbI
hAhAdtbmmm
-
18
0)()()()(
)()()()(
)()()()(
)()()()(
0)()()()(
)()()()(
0)()()()(
)()()()(
141411111
252528282
262623232
171712121
26262323
17171212
25252828
14141111
gggg
gggg
gggg
gggg
gggg
gggg
gggg
gggg
xyxcxyxkxyxcxyxky
xyxcxyxkxyxcxyxky
yxycyxykyxycyxykx
yxycyxykyxycyxykxI
yxycyxykyxycyxyk
yxycyxykyxycyxykym
xyxcxyxkxyxcxyxk
xyxcxyxkxyxcxyxkxm
)(tfKuuCuM
x tu t y t
t
-
19
0 00 ; 0, and , in general, are non-diagonal
Equations are coupledSuppose we introduce a new set of dependentvariables ( ) using the transformation
( )where is a tra
MX CX KX F t
X X X XM C K
Z tX t TZ t
T n n
nsformaiton matrix, to beselected.
How to uncouple equations of motion?
-
20
0 00 ; 0
( )
( )
( )
( )
, ,& structural matrices in the new coordinate system.( ) force vector in the new coord
t t t t
MX CX KX F t
X X X X
X t TZ t
MTZ t CTZ t KTZ t F t
T MTZ t T CTZ t T KTZ t T F t
MZ t CZ t KZ t F t
M C KF t
inate system
Can we select such that , ,& are all ?If yes, equation for ( ) would then represent a set of uncoupled equations and hence can be solved easily.
T M C KZ t
QuestionDIAGONAL
-
21
How to select to achieve this?TConsider the seemingly unrelated problem ofundamped free vibration analysis
0Seek a special solution to this set of equations in whichall points on the sturcutre oscillate harmonically at thesa
MX KX
2
2
me frequency.That is
exp ; 1,2, ,
or, exp where is a 1 vector.
exp & exp
exp 0
k kx t r i t k n
X t R i t R n
X t i R i t X t R i t
MR KR i t
-
22
22
2
exp 0
0
This is a algebraic eigenvalue problem.
; is positive semi-definite is positive definite
Eigensolutions would be real valuedand eigenvalues w
t t
MR KR i t
RM KR
KR MR
K K M MKM
Note
ould be non-negative.
-
23
2
2
12
12 2
12
12
0
Let exist.
0
0 0
If exists, =0 is the solution.
Condition for existence of nontrivial solution is that
should not exist
KR MR
K M R
K M
K M K M R
IR R
K M R
K M
2
2 2 21 2
1 2
.
0
This is called the characteristic equaiton.This leads to the characteristic values
and associated eigenvectors, , , .
n
n
K M
R R R
-
24
2
2
2
Consider - th and -th eigenpairs. (1)
(2)
(1)
(3)
(2)
r r r
s s sts
t ts r r s r
tr
tr s s
r sKR MR
KR MR
R
R KR R MR
R
R KR
Orthogonaility property of eigenvectors
2
2
2
2 2
(4)Transpose both sides of equation (4)
Since & , we get (5)
Substract (3) and (5)
0
tr s
t t t ts r s s r
t t
t ts r s s r
tr s s r
R MR
R K R R M R
K K M MR KR R MR
R MR
0
0
ts rts r
R MR r s
R KR r s
2
Normalization1ts s
ts s s
R MR
R KR
-
25
21 ( )
2 2 21 2
Introduce
Diag
n n n
n
R R R
t
t
M IK
Orthogonality relations
Select T
-
26
0 0
2
0 ; 0
( )
( )
( )
( )
; 1,2, ,
How about initial conditions?(0) 0
(0) 0 0
0 (0) & 0 (0)
t t t
r r r r
t t
t t
MX KX F t
X X X X
X t Z t
M Z t K Z t F t
M Z t K Z t F t
IZ t Z t F t
z z f t r n
X Z
MX M Z Z
Z MX Z MX
ConsiderUndampedForcedVibrationAnalysis
-
27
0
1
1 0
0 10 cos sin sin
0 10 cos sin sin
tr
r r r r r rr r
n
k kr rr
tnr
kr r r r r rr r r
zz t z t t t f d
X t Z t
x t z t
zz t t t f d
-
28
0 00 ; 0
( )
( )
( )
( )
If is not a diagonal matrix, theequations
t t t t
t
t
MX CX KX F t
X X X X
X t Z t
M Z t C Z t K Z t F t
M Z t C Z t K Z t F t
IZ t C Z t Z t F t
C
How about damped forced response analysis?
of motion would still remain coupled.
-
29
If the damping matrix is such that is a diagonal matrix, then equaitons would
get uncoupled.Such matrices are called classical damping matrices.
Rayleigh's proport
t
CC
C
Classical damping models
Exampleional damping matrix
t t t
C M K
C M KI
-
30
2
2
[ ]
[ ] [ ]
2 2
T T
T T
i
n n
nn
n
C M KC M KI K
I Diag
c
-
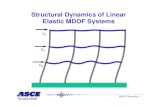
31
100
101
102
103
10-4
10-3
10-2
10-1
100
frequency rad/s
eta
mass and stiffness proportional
stiffness proportionalmass proportional
-
32
2
0
( )
0 (0) & 0 (0)
2 ; 1,2, ,
with 0 & 0 specified.
exp cos sin
1 exp
t
t t
r r r r r r r
r r
r r r r dr r dr
t
r r rdr
IZ t C Z t Z t F t
Z MX Z MX
z z z f t r n
z z
z t t a t b t
t f d
-
33
0
1
1 0
1exp cos sin exp
1exp cos sin exp
1,2, ,
t
r r r r dr r dr r r rdr
n
k kr rr
tn
kr r r r dr r dr r r rr dr
z t t a t b t t f d
X t Z t
x t z t
t a t b t t f d
k n
-
34
u t u t
1m
2m
3m
1k
2k
3k
1z t
2z t
3z t
Example 1
-
35
-
36
0.024 0.009 0.007 t
-
37
1 2 3
-
38
-
39
gx t gy t
Example 2
-
40
Physical properties of the frame members
-
41 0.02 0.02 0.01 t
-
42
1 2 3
Mode shapes
-
43
-
44
Summary
• Normal modes of vibration of a structure are special undamped free vibration solutions such that all points of the structure oscillate harmonically at the same frequency with the ratio of displacements at any two points being independent of time.
• Thus, for a structure vibrating in one of its modes, the phase difference between oscillations at any two points is either 0 or π.
• The frequencies at which normal mode oscillations are possible are called the natural frequencies.
-
45
Summary (Continued)
• Modal matrix is orthogonal to mass and stiffness matrices. This helps is diagonalising the mass and stiffness matrices.
• Undamped normal modes, in conjunction with proportional damping models, simplify vibration analysis procedures considerably.