
VEX Motors: Presented by: Mr. Harder & Thuan Doan Robotics Training Week 2010.
15
VEX Motors: Presented by: Mr. Harder & Thuan Doan Robotics Training Week 2010
-
Upload
philip-moore -
Category
Documents
-
view
217 -
download
1
Transcript of VEX Motors: Presented by: Mr. Harder & Thuan Doan Robotics Training Week 2010.

VEX Motors:
Presented by:Mr. Harder & Thuan
DoanRobotics Training Week 2010
General Topics Torque Speed Example problems Torque curves and specification sheets Gear ratio
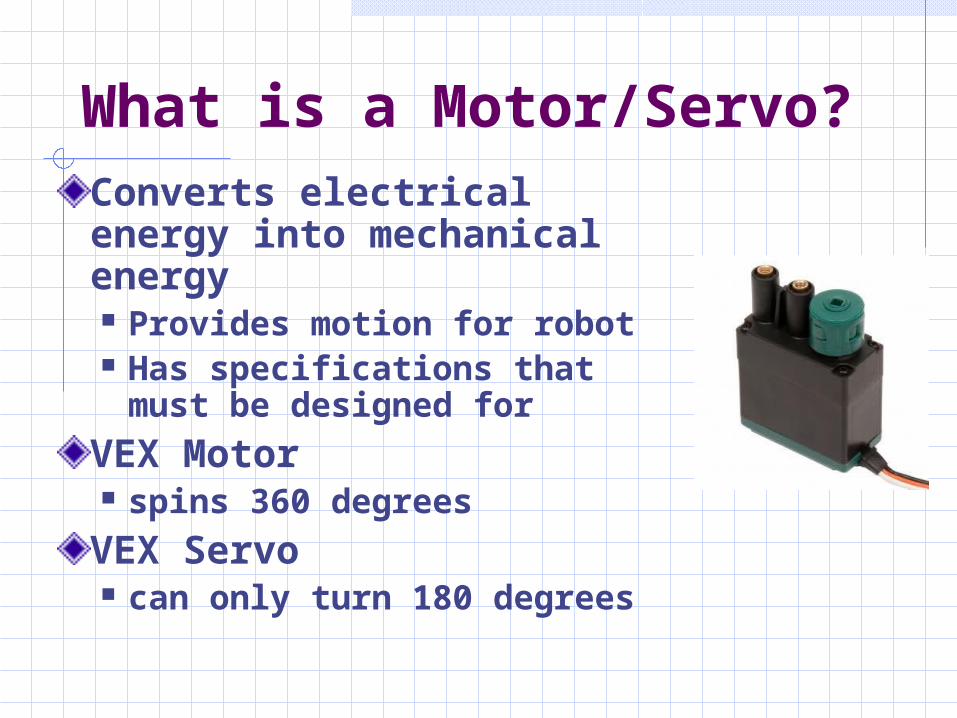
What is a Motor/Servo?Converts electrical energy into mechanical energy Provides motion for robot Has specifications that must
be designed for
VEX Motor spins 360 degrees
VEX Servo can only turn 180 degrees

TorqueForce at a distance Rotational strength of a motor Measured in Newton-meters or foot-
pounds Be aware of unit conversions
Speed
Rotations per minute (RPM) May be measured as radians/second

Power
Power = angular velocity * torque Prot = τ*ω Measures how strong and how fast a
motor is spinning Measured in Watts (radians -Newton-
meters/second) This relationship shows that speed
and torque are inversely related Less torque = more speed More torque = less speed

Gears, Chains & SprocketsGearing can be used to change the output torque/speed Sprockets and chains can be used
for same purpose Slightly less efficiency loss
See drive presentation for details
Power Loss in the Mechanism
Some power from the motor is lost due to friction in the mechanism Gears, belts, cables Bearings, guides Tires, balls, or other deformable item
Power loss is heatHeat and friction are usually not your friends
transmission efficiency is important
Spur gears: 90% per pairWorm and gear: 10%-60%Chain: 85%-95%Rack and pinion 50%-80%

Motor ParametersApplied voltage ( V )
Voltage of your power source (7.5V for VEX)
Stall torque ( stall ) Torque at zero speed Highest torque that motor
can output
Stall current ( istall ) Amount of current drawn
by motor when stalling
Free speed ( free ) Speed of a motor under no
load Fastest speed of a motor

stall = 6.5 in-lbs
istall = 1.6 A
free = 100 rotations/minute
VEX Motor Specifications
Stall torque
Stall current
Free speed
Reference voltage
V = 7.5 Volts

Current vs. Torque Fisher-Price motor
0
20
40
60
80
100
120
140
160
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Cur
rent
, A
148 A
• Higher torque = higher current• More torque you put on your motor, the
more current it draws -> • Stall current is reached at stall torque
(remember?)

Speed vs. Torque
• Inversely related
•Review: (important concept)
• Stall torque -> speed = 0
• Stall speed -> torque = 0
•More torque -> Less speed

Max Power• Max power = max
output of the motor• This is the power
you should design for
• Torque at max power is half of stall torque
• Speed at max power is half of free speed
Fisher-Price motor
0
500
1000
1500
2000
2500
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Spee
d (ra
d/s)
; Po
wer
(W)
Output power, W
Speed, rad/s
407 W
Stall

Peak Efficiency Fisher-Price motor
0
10
20
30
40
50
60
70
80
90
100
0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70
Torque (Nm)
Eff
icie
ncy,
%
76%
Peak efficiency is about at about 1/3 – 1/6 of stall torque
Occurs at about 60% of Max Power After max efficiency -> efficiency
crashes

After this exhausting presentation…
Definitions of all terms discussedHow to calculate power, max power, torque, and speed (including unit conversions)Relationship between torque and speedRelationship between torque and currentWhat causes power loss in a systemBasic understanding of gear ratios


















