Vehicle Tracking using Optical Features - - TU … · rrlab.cs.uni-kl.de Songlin Piao Robotics...
27
rrlab.cs.uni-kl.de Songlin Piao Robotics Research Lab University of Kaiserslautern, Germany Vehicle Tracking using Optical Features
Transcript of Vehicle Tracking using Optical Features - - TU … · rrlab.cs.uni-kl.de Songlin Piao Robotics...

rrlab.cs.uni-kl.de
Songlin Piao
Robotics Research LabUniversity of Kaiserslautern, Germany
Vehicle Tracking using Optical Features

rrlab.cs.uni-kl.de
Outline
Motivation
State-of-Art
Proposed System
Experiments
Conclusion
rrlab.cs.uni-kl.de
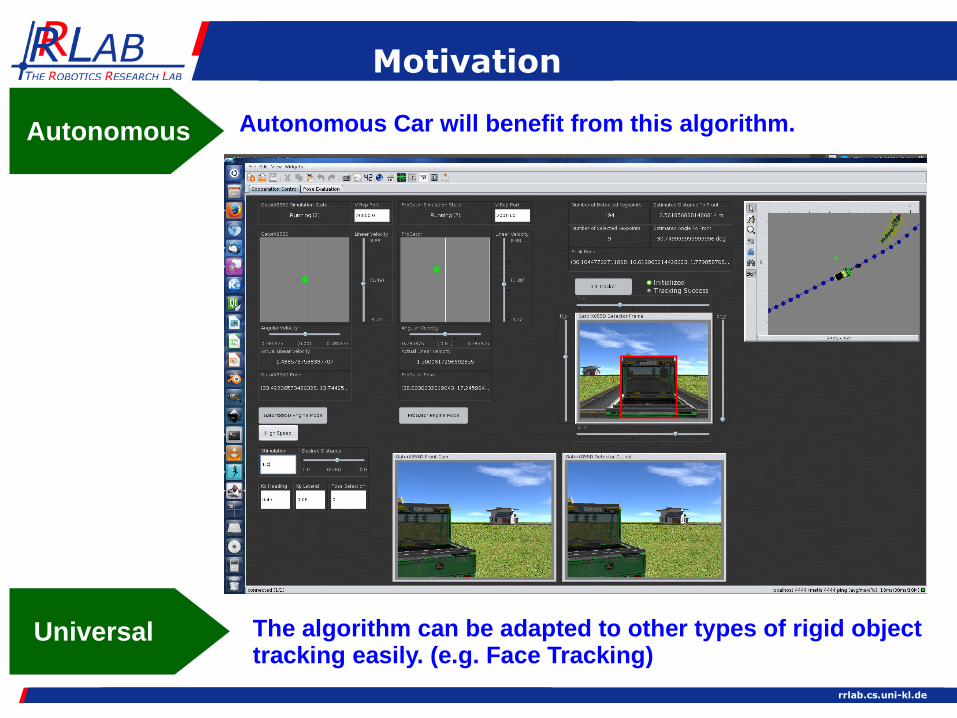
Motivation
Universal
Autonomous
The algorithm can be adapted to other types of rigid object tracking easily. (e.g. Face Tracking)
Autonomous Car will benefit from this algorithm.

rrlab.cs.uni-kl.de
State-of-Art I
Long-term Tracking Methods
TLD (Tracking-Learning-Detection )
CMT (Consensus-based Matching and Tracking of Keypoints for Object Tracking )
Drawbacks:
Drawbacks:
1. Not able to estimate the rotation of object.
2. Inaccurate scaling estimation.
1. The original object model will not be updated.
3. Unable to locate the object when the object out of the image partially
2. Inaccurate matching with BRISK descriptor when new appearance of object appears.

rrlab.cs.uni-kl.de
Vehicle Tracking System Structure
Detector
Tracker
Dynamic Update Module
TrackingRotation, Scaling
Estimation Detection Model Update

rrlab.cs.uni-kl.de
Contribution
C-BRISK descriptor
Dynamic update module for object
Comparison between various kinds of descriptors
C-BRISK is based on BRISK keypoints detection method.
C-BRISK adds color information in binary BRISK descriptor to improve the performance of BRISK.
SIFT, SURF, ORB, BRISK, C-BRISK
Dynamically updates object model to instead of the static object model.
Applying various detection methods and corresponding descriptors in this tracking system and comparing the performance of detector, tracker and updating module with these descriptors.
SIFT, SURF, ORB, BRISK, C-BRISK

rrlab.cs.uni-kl.de
Detector
Matching Based Detection I

rrlab.cs.uni-kl.de
Matching Based Detection II
Detector flow chart
Keypoints Detection

rrlab.cs.uni-kl.de
BRISK Keypoints Detection
FAST keypoints detection BRISK keypoints detection
-BRIEF,ORB
-Threshold are needed to control the number of keypoints produced.
-Combined the advantages of SIFT,SURF and ORB detection methods.

rrlab.cs.uni-kl.de
Matching Based Detection
Detector flow chart
Generating descriptors

rrlab.cs.uni-kl.de
BRISK Descriptor
The local gradient of keypoint pair (Pi , Pj ) can be represented as g :
Each bit of the binary BRISK descriptor can be determined as following:

rrlab.cs.uni-kl.de
C-BRISK Descriptor
3 by 3 pattern
m(R,G,B): Median value of R,G,B value
For color image:
For gray image:
C-BRISK change the m(R,G,B) to the median value of gray values of the 3 by 3 pattern and keep the length of C-BRISK at 536 bits.

rrlab.cs.uni-kl.de
BRISK VS C-BRISK
BRISK C-BRISK

rrlab.cs.uni-kl.de
Matching Based Detection
Detector flow chart Object model initialization
123
n-1n
0

rrlab.cs.uni-kl.de
Tracking Module
Tracker

rrlab.cs.uni-kl.de
L-K Tracking Method & Forward-Backward Error Method
Tracking Module
Forward-Backward Error Method
- d is the image velocity of point x
- u is the previous position of x
- v is the current position of x

rrlab.cs.uni-kl.de
Dynamic Updating Module I
Dynamic Updating Module

rrlab.cs.uni-kl.de
Dynamic Updating Module II
Dynamic Updating Module
VS
Learning Module in TLD
Dynamic updating module structure
Similarity: Updating of both methods are based on the tracking result.
Difference: TLD updates the the training data (patchs) for cascade classifiers while DUM updates the descriptors of keypoints in the object model for better matching of keypoints belongs to object.

rrlab.cs.uni-kl.de
Dynamic Updating Module III
Object Model
Update Model

rrlab.cs.uni-kl.de
Experiments I
SIFT
BRISK
SURF
ORB
Keypoints detection test

rrlab.cs.uni-kl.de
Experiments I
Number of Keypoint and time

rrlab.cs.uni-kl.de
SIFT
SURF
ORB
BRISK
C-BRISK
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Recall
SIFT
SURF
ORB
BRISK
C-BRISK
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Precision
Experiments II

rrlab.cs.uni-kl.de
Experiments III
UpdateUpdate

rrlab.cs.uni-kl.de
Experiments III Experiments III

rrlab.cs.uni-kl.de
Experiments IV
C-BRISK method with rotation

rrlab.cs.uni-kl.de
Conclusion and Outlook
-C-BRISK also can be improved by optimizing weightings of color information in this descriptor.
-The timing of updating the descriptor could be a dynamic processing according to different situations.
-The dynamic updating module used in this thesis could be improved by updating the background model.
-C-BRISK is more accurate to describe the keypoints than BRISK.
-Tracker improves the performance of system for most descriptors.
-Comparing with the other descriptors in the experiments proves that C-BRISK and dynamic updating module improve performance of this system.

rrlab.cs.uni-kl.de
Thank you !
Questions?

