Two-Dimensional Motion and Vectors 3.1 Introduction to Vectors.

Vectors in 2D and 3DVectors1. Three dimensional coordinates:
Point in plane: two perpendicular lines asreference:

Vectors in 2D and 3D
Point in space: three perpendicular lines asreference -

Vectors in 2D and 3D
B C B C plane plus z axis perpendicular to plane.
Coordinates of point indicated aboveT À ÐBß Cß DÑ
[ ]e.g., three corner lines of the room
[we get the three numbers by droppingÐBß Cß DÑperpendiculars to the three axes]

Vectors in 2D and 3DEx 1: Calculation of an orbit to the moon:
[need to set up coordinate system and measure allpoints elative to this r ]
Vectors in 2D and 3D
[all mathematics is done by specifying position ofthe spacecraft and the moon relative to somecoordinate system, say centered at the earth; that'show orbits are calculated at JPL and NASA]

Vectors in 2D and 3D2. Vectors:
A vector is an arrow - it has direction and length. Ifyou are hiking and say that you are 3 mi NNW ofyour camp you are specifying a vector.

Vectors in 2D and 3DThe precise mathematical statement is that:
Geometric definition of vectors: A is avectordirected line segment. The length of a vector isvsometimes called its or the of .magnitude norm vWe will always abbreviate length by the symbol
length of v vœ l l Þ

Vectors in 2D and 3DTwo vectors are equal if they point in the samedirection and have the same length: [where the vector starts is not important]

Vectors in 2D and 3DWe can add vectors:

Vectors in 2D and 3DAnd we can multiply vectors by real numbers(scalar multiplication):
If then is the vector in theα α !ß adirection of whose length is .a aα
If then satisfiesα α ! a
direction direction Ð Ñ œ Ð ÑÞαa a
l l œ l ll l Þα αa a

Vectors in 2D and 3DSince we can add vectors and perform scalarmultiplication, we can subtract two vectors:
-a b a b œ Now assume initial points of all vectors are locatedat the origin:

Vectors in 2D and 3D

Vectors in 2D and 3DConsider also the unit vectors e e e" # $ß ß À

Vectors in 2D and 3D

Vectors in 2D and 3D
[We see and ]+ + + + +" " # # " " # # $ $e e e e e
Notation: a e e eœ + + + œ œ+++
" " # # $ $
"
#
$
Ô ×Õ Ø
vector from origin to Ð+ ß + ß + ÑÞ" # $
Given the vector we geta e e e œ + + + ß" " # # $ $
by distance formula:
l l œ Ð+ !Ñ Ð+ !Ñ Ð+ !Ñ œa È " # $# # #È+ + +" # $
# # #

Vectors in 2D and 3D
Analytic definition of vectors in 3 dimensions: A vector
is an array of numbers.Ô ×Õ Ø+++
"
#
$

Vectors in 2D and 3D3. Addition of vectors
Analytic addition of vectors:
a bœ œ+ ,+ ,” • ” •" "
# #
fig 4

Vectors in 2D and 3D
a b œ+ ,+ ,” •" "
# #
Simliarly in three dimensions:
fig 5

Vectors in 2D and 3D
a bœ œ+ ,+ ,+ ,
Ô × Ô ×Õ Ø Õ Ø
" "
# #
$ $
Ê œ œ+ ,+ ,+ ,
a bÔ ×Õ Ø
" "
# #
$ $
Moreover, can show similarly that:
αααα
a œ+++
Ô ×Õ Ø
"
#
$

Vectors in 2D and 3DExample 2:
A light plane flies at a heading of due north(direction which airplane is pointed) at air speed(speed relative to the air) of 120 km/hr in a windblowing due east at 50 km/hr. What direction andspeed does the plane move at relative to theground?
A: Define the velocity of the airplane as the vectorv whose length is the speed of the plane andwhose direction is the direction of the plane:

Vectors in 2D and 3D
Note: wind velocity is ; plane's air velocity500” •
(relative to wind) is 0120” •
Also: every hour plane flies 120 kilometers northand 50 kilometers east.
Thus direction of the plane is same as 50120” •

Vectors in 2D and 3D
fig 7
What is the speed: È"#! &! œ "$!Þ# #
Vectors in 2D and 3D
Thus speed of airplane is 130 = length of ;” •&!"#!
direction of airplane is same as 50120” •
Ê velocity of airplane is vector
= + = wind velocity + air50 50 0120 0 120” • ” • ” •
velocity of plane

Vectors in 2D and 3DMoral: when we take an object moving at velocityv" (air velocity) in a medium which is moving atvelocity (wind velocity), the total velocity of thev#
object is .v v vœ " #

Properties of Vectors4. Properties of vectors:Theorem: If , and are vectors (in two or threea b c,dimensions) and and are scalars, then:. /(a) (commutativity)a b b a œ (b) (associativity)Ð Ñ œ Ð Ña b c a b c(c) (distributivity).Ð œ . .a b a bÑ(d) (distributivity)Ð. /Ñ œ . /a a a(e) There is a unique vector such that for0 a 0 a œall vectors a(f) For every vector there is a unique vector a a such that a a œ !(g) .Ð/ Ñ œ Ð./Ña a(h) " † œa a

Properties of Vectors
[other properties you would expect are listed in the book;they follow from the above properties]
Proof: (a): Assume that
a bœ à œ+ ,ã ã+ ,
Ô × Ô ×Õ Ø Õ Ø
" "
8 8
Note that the entries in have the general form for a + 3 œ "3
through .8

Properties of VectorsWe will use shorthand by writing in terms of the generalaterm in :a
a œ Ð+ ÑÞ3
Similarly,
b œ Ð, ÑÞ3
Thus
a b b a œ œ œ œ Þ+ , + , , +ã ã ã ã+ , + , , +
Ô × Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø Õ Ø
" " " " " "
8 8 8 8 8 8

Properties of VectorsIn shorthand the above could be written:
a b b a œ Ð+ Ñ Ð, Ñ œ Ð+ , Ñ œ Ð, + Ñ œ Ð, Ñ Ð+ Ñ œ Þ3 3 3 3 3 3 3 3
(b)
Ð Ñ œ Ð Ð+ Ñ Ð, ÑÑ Ð- Ñ œ Ð+ , Ñ Ð- Ña b c 3 3 3 3 3 3
œ ÐÐ+ , Ñ - Ñ œ Ð+ Ð, - ÑÑ œ Ð+ Ñ Ð, - Ñ3 3 3 3 3 3 3 3 3
œ + ÐÐ, Ñ Ð- ÑÑ œ Ð Ñ3 3 3 a b c as desired.

Properties of VectorsAs an exercise, write out the proof in full, i.e. replace
Ð+ Ñ Ä
++ã+
3
"
#
8
Ô ×Ö ÙÖ ÙÕ Ø
Ð+ , Ñ Ä ß
+ ,+ ,
ã+ ,
3 3
" "
# #
8 8
Ô ×Ö ÙÖ ÙÕ Ø
etc., to see how it looks.

Properties of Vectors
[Note it is remarkable that if you replace the word vectorwith the word matrix, the same statements as above are allstill true.]

Vectors in n dimensionsAnalytic definition of vectors in dimensions: 8 A vectoris a vertical array of numbers:8
v œ Þ
++ã+
Ô ×Ö ÙÖ ÙÕ Ø
"
#
8
Note: all definitions of analytic operations on vectors in 3dimensions hold for vectors in dimensions.8

Vectors in n dimensionsCan easily see that all properties (1)-(8) of vectors in 3 and2 dimensions carry over to vectors in dimensions; proofs8are identical.
[geometric visualization of vectors in dimensions is not8necessary at this point]

Vector spans5. Spans of vectors
Def 6: We define ‘ ‘$"
#
$
3œ B −BBB
Ú ÞÛ ßÜ à
Ô ×Õ Ø»
where means the set of all real numbers. Thus is all‘ ‘$
3-tuples of real numbers.
Def 7: A of two vectors and is a sum linear combination a b- -" #a b
for constants and - - Þ" #
Linear combination for larger collection of vectorsworks the same way.

Vector spans
Ex: Consider two vectors a e b eœ œ à œ œ À" !! "! !
Ô × Ô ×Õ Ø Õ Ø" #

Vector spansThen:
- - œ - - œ Þ" ! -! " -! ! !
" # " #
"
#a bÔ × Ô × Ô ×Õ Ø Õ Ø Õ Ø
Note as and vary, this covers points in the - - B C" # allplane.
We say of and all possible linear combinationsspan a b œof and all vectors in plane.a b œ B C

Vector spansGenerally can show: span of two vectors all vectorsœcontained in the plane of the first two.
General definition: The of a collection of vectorsspan Ö ß ßá ß ×v v v" # 8 is the collection of all possible linearcombinations
spanÖ ßá ß × œ Ö- - á - À - − ×Þv v v v v v"ß # 8 " " # # 8 8 3 ‘
Above means "is an element of"− Þ

Matrices and linear systems6. Matrices and linear systems of equations:
Return to previous problem: Coal, Steel,Electricity:
[NOTE: There is an example of Leontief'seconomic model in the book; the equations thereare DIFFERENT than here; they guarantee that theamount used for the production of each commodity(coal, steel, electricity) ends up equalling the valueof the commodity produced; in our variation ofLeontief's equations we have (non-zero) targets fornet production of each commodity, and findproduction levels to attain those targets]

Matrices and linear systems
To make $ of coal, takes no coal, $. of steel, " "! $. of electricity."!To make $ of steel, it takes $. of coal, $. of" #! "! steel, and $. of electricity.#!To make $ of electricity, it takes $. of coal; $. " %! #! of steel, and $. of electricity."!
Let total amount of coal producedB œ"
total amount of steel producedB œ#
total amount of electricity producedB œ$

Matrices and linear systemsGoals of economy:
If we want the economy to output $1 billion of coal,$.7 billion of steel, and $2.9 billion of electricity,how much coal, steel, and electricity will we need touse up? I.E., what will be?B ß B ß B" # $
Recall the equations:B Þ#B Þ%B œ "" # $
(*) Þ"B Þ*B Þ#B œ Þ(" # $
Þ"B Þ#B Þ*B œ #Þ*" # $

Matrices and linear systems give us for and B 3 œ "ß #ß $Þ3
Note: system (*) equivalent to a single matrixequation:
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø
" Þ# Þ% B " Þ" Þ* Þ# B Þ( Þ" Þ# Þ* B #Þ*
œ"
#
$
Matrices and linear systemsCheck:Ä
Ô × Ô ×Õ Ø Õ Ø
B Þ#B Þ%B " Þ"B Þ*B Þ#B Þ( Þ"B Þ#B Þ*B #Þ*
œ" # $
" # $
" # $
Ê B Þ#B Þ%B œ " " # $
(*) Þ"B Þ*B Þ#B œ Þ( ß" # $
Þ"B Þ#B Þ*B œ #Þ*" # $

Matrices and linear systems = original system of equations.
[Very compact form for writing equations.]
If we call
E œ ß" Þ# Þ%
Þ" Þ* Þ# Þ" Þ# Þ*
Ô ×Õ Ø
Matrices and linear systems
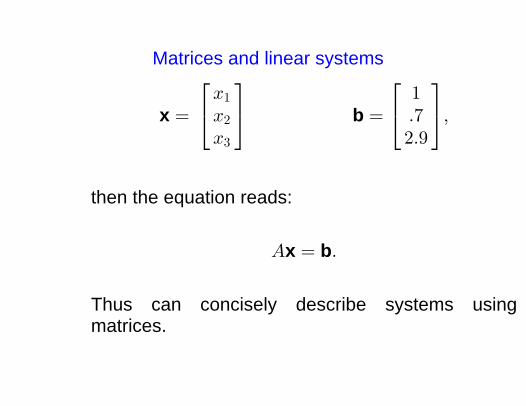
x bœ œ ßB "B Þ(B #Þ*
Ô × Ô ×Õ Ø Õ Ø
"
#
$
then the equation reads:
E œ Þx b
Thus can concisely describe systems usingmatrices.

Matrices and linear systemsGenerally: if we have
+ B + B á + B œ ,"" " "# # "8 8 "
+ B + B á + B œ ,#" " ## # #8 8 #
+ B + B á + B œ ,$" " $# # $8 8 $
ã
+ B + B á + B œ ,7" " 7# # 78 8 7

Matrices and linear systemsCan be described by where:E œx b
E œ œ
+ + á ++ + á +ã ã ã
+ + á +
+
Ô ×Ö ÙÖ ÙÕ Ø
c d"" "# "8
#" ## #8
7" 7# 78
34
x bœ œ
B ,B ,ã ãB ,
Ô × Ô ×Ö Ù Ö ÙÖ Ù Ö ÙÕ Ø Õ Ø
" "
# #
8 7

Matrices and linear systems[now we can concisely write any system ofequations].

Matrix multiplication and vectors7. Matrix multiplication and vectors.
Ex 1: System from above:
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø
" Þ# Þ% B " Þ" Þ* Þ# B Þ( Þ" Þ# Þ* B #Þ*
œ"
#
$
E œ Þx b
General form:

Matrix multiplication and vectors
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø+ + + B ,+ + + B ,+ + + B ,
œ"" "# "$ " "
#" ## #$ # #
$" $# $$ $ $
Write:
E œ Ò Óa a a" # $
where
a a a" # $œ à œ à œ Þ" Þ# Þ%
Þ" Þ* Þ#Þ" Þ# Þ*
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø

Matrix multiplication and vectorsFocus on left side:
E œ Ò ÓBBB
x a a a" # $
"
#
$
Ô ×Õ Ø
œ+ + + B+ + + B+ + + B
Ô × Ô ×Õ Ø Õ Ø
"" "# "$ "
#" ## #$ #
$" $# $$ $

Matrix multiplication and vectors
œ+ B + B + B+ B + B + B+ B + B + B
Ô ×Õ Ø
"" " "# # "$ $
#" " ## # #$ $
$" " $# # $$ $
œ + B + B + B+ B + B + B+ B + B + B
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø
"" " "# # "$ $
#" " ## # #$ $
$" " $# # $$ $
œ B B B+ + ++ + ++ + +
" # $
"" "# "$
#" ## #$
$" $# $$
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø
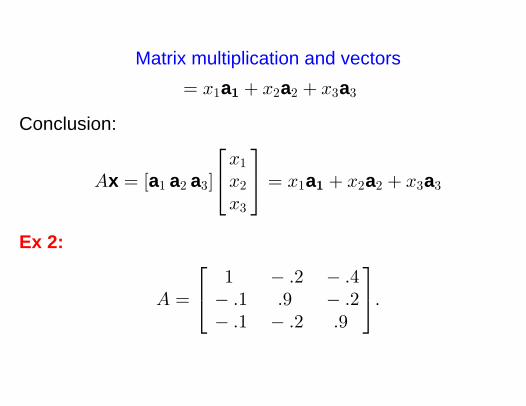
Matrix multiplication and vectorsœ B B B" # # $ $a a a"
Conclusion:
E œ Ò Ó œ B B BBBB
x a a a a a a" # $ " # # $ $
"
#
$
Ô ×Õ Ø "
Ex 2:
E œÔ ×Õ Ø
" Þ# Þ% Þ" Þ* Þ# Þ" Þ# Þ*
Þ

Matrix multiplication and vectorsThen
E œxÔ ×Ô ×Õ ØÕ Ø
" Þ# Þ% B Þ" Þ* Þ# B Þ" Þ# Þ* B
"
#
$
œ B B B Þ" Þ# Þ%
Þ" Þ* Þ#Þ" Þ# Þ*
" # $
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø
[another way of writing it]
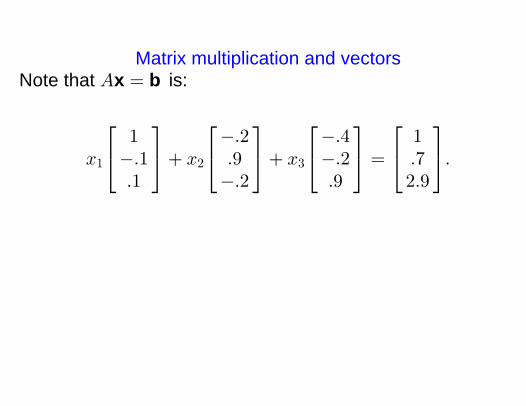
Matrix multiplication and vectorsNote that is:E œx b
B B B œ Þ" Þ# Þ% "
Þ" Þ* Þ# Þ(Þ" Þ# Þ* #Þ*
" # $
Ô × Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø Õ Ø

Spanning and equations8. Spanning and equations:Ex 3: Consider question: What is the span of the vectors
a a a" # $œ ß œ ß œ" # !" ! #! " "
Ô × Ô × Ô ×Õ Ø Õ Ø Õ Ø and ?
Answer: Find all vectors obtained as:b œÔ ×Õ Ø,,,
"
#
$
- - - œ" " # # $ $a a a b (1)
for some .- ß - ß -" # $

Spanning and equationsEquations read:
Ò Ó œ- ,- ,- ,
a a a" $
" "
# #
$ $
#
Ô × Ô ×Õ Ø Õ Ø
or
E œ E œ Ò Ó œ ß œ- ,- ,- ,
c b a a a c bwhere , " # $
" "
# #
$ $
Ô × Ô ×Õ Ø Õ Ø
or
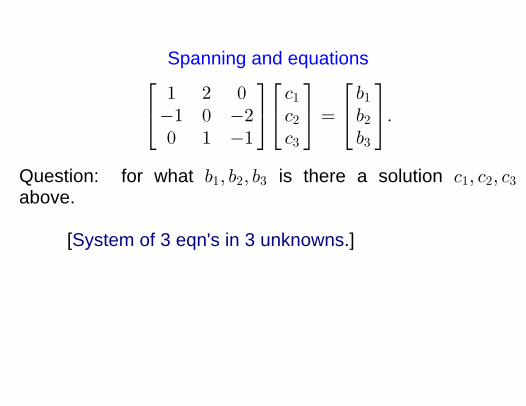
Spanning and equations
Ô ×Ô × Ô ×Õ ØÕ Ø Õ Ø
" # ! - ," ! # - ,! " " - ,
œ Þ" "
# #
$ $
Question: for what is there a solution , ß , ß , - ß - ß -" # $ " # $
above.
[ .]System of 3 eqn's in 3 unknowns

Spanning and equationsAugmented matrix:
Ô × Ô ×Õ Ø Õ Ø
" # ! l , " # ! l ," ! # l , ! # # l , ,! " " l , ! " " l ,
Ä" "
# " #
$ $
Ä" # ! l ,! " " l , Î# , Î#! " " l ,
Ô ×Õ Ø
"
" #
$

Spanning and equations
Ä" # ! l ,! " " l , Î# , Î#! ! ! l , , Î# , Î#
Ô ×Õ Ø
"
" #
$ " #
(2)
Note: exists solution iff , , Î# , Î# œ !Þ$ " #
Conclude solution does NOT exist for all bÞ
Note that:equation (1) has solution for ALL b bÍ −every vector is a linear combination‘$
of a a a" # $ß ß span Í ß ß Þa a a" # $
$‘

Spanning and equations
[Note also: if left side of had a pivot entry on last row,Ð#Ñwe wouldn't have problem with no solutions].
Conclude: also:
equation (1) has a solution for ALL echelon form of b Í Ehas a pivot entry in every row.
Theorem 4: The following are equivalent:(a) The columns of span a a a"
$ß E# $ß ‘(b) has a solution for each Ex b bœ − ‘$
(c) has a pivot position in every row.E

Spanning and equations
Proof: In book.
More generally, this theorem holds for any set of vectors:
Theorem 5: The following are equivalent for a matrix7‚ 8E:(a) The columns of a matrix span a a a"
7ß E# 8ßá ß ‘(b) has a solution for each Ex b bœ − ‘8
(c) has a pivot position in every rowE Þ
Spanning and equationsNote this gives an algorithm for checking whether vectorsa a" 8
8ßá ß E span - form matrix and check if every row‘has a pivot position.
[we now start material from section 1.5]

Properties of matrix-vector products:
Theorem 6: If is a matrix and and are vectors and E -u v is a scalar, then:(a) EÐ Ñ œ E Eu v u v(b) EÐ- Ñ œ -EÐ Ñu u .
Proof: Ð+Ñ À
EÐu+v a a aÑ œ Ò á Ó
? @? @
ã? @
" # 8
" "
# #
8 8
Ô ×Ö ÙÖ ÙÕ Ø

œ Ð? @ Ñ Ð? @" " " # #a a aÑ á Ð? @ Ñ# 8 8 8
œ Ð Ð@? á ? Ñ á @ Ñ" " 8 8 " " 8 8a a a a
œ Eu vE Þ
( ) In book - proof is similar.,