Using Quasi-variance to Communicate Sociological Results from ...
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
Michael H. Zhu 1 Chang Liu 2 Jun Zhu 3
AbstractParticle-based Variational Inference methods(ParVIs), like Stein Variational Gradient Descent,are nonparametric variational inference methodsthat optimize a set of particles to best approximatea target distribution. ParVIs have been proposedas efficient approximate inference algorithms andas potential alternatives to MCMC methods. How-ever, to our knowledge, the quality of the posteriorapproximation of particles from ParVIs has notbeen examined before for large-scale Bayesianinference problems. We conduct this analysisand evaluate the sample quality of particles pro-duced by ParVIs, and we find that existing ParVIapproaches using stochastic gradients convergeinsufficiently fast under sample quality metrics.We propose a novel variance reduction and quasi-Newton preconditioning framework for ParVIs,by leveraging the Riemannian structure of theWasserstein space and advanced Riemannian opti-mization algorithms. Experimental results demon-strate the accelerated convergence of variance re-duction and quasi-Newton methods for ParVIsfor accurate posterior inference in large-scale andill-conditioned problems.
1. IntroductionA central problem in Bayesian inference is approximating anintractable posterior distribution p and estimating intractableexpectations Ep [f(X)] =
∫f(x)p(x) dx with respect to p.
MCMC methods (Brooks et al., 2011) are based on simu-lating a Markov chain with limiting distribution p, drawingsamples x1, x2, . . . which represent p, and computing thesample average 1M
∑Mi=1 f(xi) which is an asymptotically
1Department of Computer Science, Stanford University, Stan-ford, CA, USA 2Microsoft Research Asia, Beijing, 100080, China3Dept. of Comp. Sci. & Tech., Institute for AI, BNRist Center,Tsinghua-Bosch ML Center, Tsinghua University, Beijing, 100084,China. Correspondence to: J. Zhu ,Michael H. Zhu .
Proceedings of the 37 th International Conference on MachineLearning, Vienna, Austria, PMLR 119, 2020. Copyright 2020 bythe author(s).
exact estimator of Ep [f(X)] as M → ∞. Variational in-ference (VI) methods (Wainwright et al., 2008; Blei et al.,2017) recast the inference problem as a parametric opti-mization problem and attempt to globally approximate theposterior distribution p with a tractable distribution fromsome variational family. MCMC methods are asymptoti-cally exact but can be slow; VI methods can be fast but aregenerally biased.
Particle-based Variational Inference methods (ParVIs) arenonparametric variational inference methods that optimize aset of particles {x1, x2, . . . , xM} to best represent p. Steinvariational gradient descent (SVGD) (Liu & Wang, 2016)is a leading instance of ParVIs that has received an increas-ing number of extensions (e.g., Zhuo et al. (2018); Chenet al. (2018a;b); Wang et al. (2019)) and applications (e.g.,Feng et al. (2017); Pu et al. (2017); Liu et al. (2017); Yoonet al. (2018)). ParVIs have been proposed as efficient ap-proximate inference algorithms potentially combining theadvantages of MCMC and VI for large-scale Bayesian infer-ence problems. However, to our knowledge, an importantquestion has not yet been explored for large-scale Bayesianinference problems: for a given posterior distribution p, howwell do the particles {x1, x2, . . . , xM} produced by ParVIsrepresent p in practice, and how accurate is the estimator1M
∑Mi=1 f(xi) of Ep [f(X)] in practice?
We explore this question in the context of Bayesian linear re-gression and logistic regression, two fundamental real-worldinference tasks. We conduct a careful empirical inspectionof the sample quality of particles produced by ParVIs undervarious metrics, including mean squared error for estimatingposterior mean and covariance, maximum mean discrep-ancy (Gretton et al., 2012), and kernel Stein discrepancy(Chwialkowski et al., 2016; Liu et al., 2016). We find thatexisting ParVI approaches using stochastic gradients con-verge insufficiently fast under these sample quality metrics,especially in large-scale and ill-conditioned scenarios.
For accurate posterior inference, highly accurate solutions tothe ParVI optimization problem are needed. In the contextof large-scale optimization, a popular method is stochasticgradient descent (SGD) because of the fast per-iterationcomputation time. While SGD can reach an approximatesolution relatively quickly, it has slow asymptotic conver-gence due to the high variance from the random sampling
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
of data points and the resulting need for decaying step sizes.Variance reduction methods for stochastic gradient descent(Roux et al., 2012; Johnson & Zhang, 2013; Defazio et al.,2014) have been proven, in theory and in practice, to ac-celerate convergence for strongly convex problems whenhighly accurate solutions are needed.
For ill-conditioned problems, however, the convergencespeeds of first-order gradient methods can be slow. One gen-eral solution is quasi-Newton methods (Nocedal & Wright,2006), like L-BFGS, which use the history of gradients toapproximate the inverse Hessian of the objective functionand scale each step by the approximate inverse Hessianto account for the curvature of the function. Extendingtraditional, full-batch L-BFGS methods to the stochastic set-ting (Byrd et al., 2016) is challenging since noisy Hessianapproximations combined with high-variance stochastic gra-dients can be unstable. Combining variance reduction andstochastic quasi-Newton methods (Moritz et al., 2016) leadsto stable Hessian approximations and low-variance stochas-tic gradients and has been shown to accelerate convergencewhen highly accurate solutions are needed.
We propose a novel variance reduction and quasi-Newtonpreconditioning framework for ParVIs. We follow the gra-dient flow perspective of ParVIs as optimization methodsfor the KL divergence on the Wasserstein space, a manifoldof probability distributions (Chen et al., 2018a; Liu et al.,2019). We develop our framework for ParVIs by leverag-ing the Riemannian structure of the Wasserstein space andRiemannian variance reduction (Zhang et al., 2016; Zhouet al., 2019) and quasi-Newton methods (Roychowdhury &Parthasarathy, 2017; Kasai et al., 2018) that enjoy provenacceleration. Our approach is more principled than intu-itively applying optimization techniques to the update ruleof each particle, as the ParVI optimization problem is notdefined on the support space. In handling the Riemannianstructure of the Wasserstein space, we trade-off the accuracyand computational cost of geometric approximation and getstable and practical algorithms. Moreover, as the Wasser-stein optimization perspective is general for ParVIs, ourframework is applicable to various ParVI instances. Underthe same experimental setup, our proposed methods greatlyimprove the convergence rate.
2. Related workVariance reduction Dubey et al. (2016) develop variancereduction techniques for Stochastic Gradient Langevin Dy-namics (SGLD), and Chatterji et al. (2018) prove sharptheoretical bounds showing that variance reduction methodsfor SGLD converge faster when highly accurate solutionsare needed. Li et al. (2019) develop variance reductionfor Hamiltonian Monte Carlo. Zhang et al. (2018b) pro-pose variance reduction techniques for SPOS (Zhang et al.,
2018a), an algorithm combining SGLD and SVGD. TheirVR-SPOS algorithm, however, is limited to SPOS since theyrely on a convergence analysis only applicable to SPOS.
ParVIs and second-order information The Stein varia-tional Newton method (Detommaso et al., 2018) uses anapproximate Newton-like update based on a computable ap-proximation to a functional Newton direction. Their methodexplicitly computes the Hessian of the log-density, so it isnot a quasi-Newton method. Wang et al. (2019) presenta generalization of SVGD with matrix-valued kernels andpropose using preconditioning matrices, such as the Hessianand Fisher information matrix, to incorporate geometricinformation into SVGD updates. They propose a practicalalgorithm based on a weighted average of Hessians at an-chor points, which is an intuitive approximation. As theHessian is a local property, distant anchor points do notnecessarily hold useful and consistent information for theHessian at the current position. Our method is based on L-BFGS, where the assumption on the Hessian approximatoris clear (i.e., the matrix satisfying secant equation that isthe closest to the previous approximator). L-BFGS variantsalso have convergence bound guarantees (e.g., Kasai et al.(2018)). Moreover, the two methods above are developedon the PH manifold (probability space that has RKHS as itstangent space) (Liu, 2017), which may not be well-defined(Liu et al., 2019) and only benefits the particular ParVIof SVGD. Another higher-order method is the RiemannianSVGD method (Liu & Zhu, 2018), which generalizes SVGDto Riemannian support space (i.e., sample/particle space).Riemannian SVGD also requires the exact Hessian, so itis not quasi-Newton. While Riemannian SVGD requires aproperly conceived metric, our method directly utilizes thegeometry of the Wasserstein objective and is more flexible.
3. PreliminariesOur variance reduction and quasi-Newton framework forParVIs is developed in the context of Riemannian geometry,where we utilize the Riemannian structure of the Wasser-stein space. We first introduce these related concepts.
3.1. Riemannian Manifold
A manifoldM is a topological space that locally behaveslike a Euclidean space (i.e., locally homeomorphic to anEuclidean open subset; see e.g., Do Carmo (1992); Abra-ham et al. (2012)). A manifold releases linear structuresand generalizes linear space to allow curvature, while stillcoming with handy structures. To begin with, a tangentvector at x ∈M admits a general definition as a directionalderivative operator at x, and all such vectors form a linearspace regarded as the tangent space TxM at x. When everytangent space is endowed with an inner product 〈·, ·〉TxM,the manifold is called a Riemannian manifold, which in-
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
duces more structures. The gradient of a function f at xis the unique tangent vector such that for any v ∈ TxM,〈grad f(x), v〉TxM is the directional derivative of f alongv. As the same in the linear case, it is the steepest ascendingdirection for f at x, thus being the foundation of Rieman-nian optimization methods. The length of a smooth curveγ : [a, b]→M can be defined as the integral over velocity:∫ ba‖γ̇t‖TxM dt where γ̇t denotes the tangent vector along
the curve at γt, and the curve with minimal length betweenany adjacent point pair on it is called a geodesic1. The ex-ponential map Expx(v) is used as the counterpart of vectoraddition to update points in optimization methods. It trans-ports a point x to another by walking along the geodesictangent to v ∈ TxM at x for length ‖v‖TxM. The paralleltransport Γyx(v) links tangent vectors at different points. Itmoves a tangent vector v at x to one at y along the geodesicfrom x to y, in a certain way that is regarded as parallel.
3.2. The Wasserstein Space
The (2-)Wasserstein space P2 is the set of distributionson a support space (i.e., sample/particle space) with finitesecond-order moments. It is very inclusive and cannot beexpressed with parametric form. Nevertheless, the structureof its tangent space makes it convenient to express its el-ements by samples. Here we consider Euclidean supportspace Rm, and treat the corresponding P2 as an infinitedimensional manifold. Let q be a point on P2, which is adistribution on Rm, and let {x(i)}Mi=1 be a set of samples,also called particles, of q. Consider updating the particleswith a vector field V on Rm (V (x) ∈ Rm,∀x ∈ Rm) foran infinitesimal ε > 0: {x(i) + εV (x(i))}Mi=1, and denotethe distribution that this new set of particles obeys as qε.Taking the continuous limit ε→ 0 and repeatedly applyingthis procedure, the vector field V induces a smooth curve ofdistributions (qt)t on P2 around q. Such a vector field V isnot unique for inducing a given distribution curve aroundq, but all these vector fields form an equivalent class underthe equivalent relation: U ' V if ∇ · (qU − qV ) = 0where “∇ · V ” denotes the divergence of vector field V .In each equivalent class, the vector field with the mini-mum L2q-norm
√Eq[V · V ] can be taken as the representor
of the class, where “·” denotes the conventional vector in-ner product. All such representors form a linear subspace
{∇ϕ | ϕ ∈ C∞c }L2q of L2q := {V | Eq[V ·V ]
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
Algorithm 1 Stochastic Variance Reduced Gradient (SVRG) for ParVIs
Require: Initial particles {x(j)0 }Mj=1, target distribution p0(x)∏Nn=1 pn(x), update period Ts, learning rate ε.
Require: Vector field estimators Û({x(j)}j)(i) and V̂n({x(j)}j)(i), parallel transport estimator Γ̂{y(j)}j{x(j)}j
({V (j)}j
)(i).
1: Initialize x̃(i) ← x(i)0 for i = 1, · · · ,M .2: for s = 1, 2, 3, · · · do3: Let x(i)0 ← x̃(i) for i = 1, · · · ,M .4: Let Ṽ (i) ←
∑Nn=1 V̂n({x̃(j)}j)(i) for i = 1, · · · ,M .
5: for k = 0, · · · , Ts − 1 do6: Uniformly randomly draw a data point nk ∈ {1, · · · , N}.
7: Let W (i)k ← Û({x(j)k }j)(i) + NV̂nk({x
(j)k }j)(i) − Γ̂
{x(j)k }j{x̃(j)}j
({NV̂nk({x̃(j
′)}j′)(j) − Ṽ (j)}j
)(i)for i =
1, · · · ,M .8: Let x(i)k+1 ← x
(i)k + εW
(i)k for i = 1, · · · ,M .
9: end for10: Let x̃(i) ← x(i)Ts for i = 1, · · · ,M .11: end for12: return {x̃(i)}Mi=1.
variance since SGD or mini-batch SGD approximates thefull gradient using a single or small mini-batch of examples.
We propose applying Riemannian SVRG (Zhang et al.,2016) to reduce the variance of SGD. The main idea ofSVRG is to maintain a reference snapshot position and acorresponding reference snapshot full-gradient. In everyiteration, the stochastic gradient at the snapshot positionminus the snapshot full-gradient is used in the update ruleas a variance reduction term. The reference snapshot posi-tion and full-gradient are periodically updated at the start ofevery outer loop and subsequently used in every iteration inthe inner loop.
We now consider the derivation of SVRG for ParVIs. Ac-cording to Riemannian SVRG (Zhang et al., 2016), at thestart of every outer loop, the current position is recorded asa reference snapshot position q̃, and the corresponding full-summation over the entire dataset is computed and stored:Ṽ := V (q̃). In each subsequent iteration k, the stochas-tic gradient at the current position qk is combined withthe stochastic gradient at the snapshot position q̃ and thestored full gradient Ṽ to get the variance-reduced gradi-ent. Concretely, in a usual update step k, for a uniformlyrandomly chosen data point nk ∈ {1, · · · , N}, the updatedirection is calculated by Wk := U(qk) + NVnk(qk) −Γqkq̃
(NVnk(q̃)− Ṽ
), which is then used to update the po-
sition: qk+1 := Expqk(εWk). Compared to SGD, we pro-
pose adding the term −Γqkq̃(NVnk(q̃)− Ṽ
)to the update
rule, which leads to a reduction in variance.
Let {x̃(i)}Mi=1 and {x(i)k }Mi=1 be the sets of samples (par-
ticles) of q̃ and qk, respectively. Then in step k, with
nk chosen, calculate W(i)k := Wk(x
(i)k ) = U(qk)(x
(i)k ) +
NVnk(qk)(x(i)k )− Γ
qkq̃
(NVnk(q̃)− Ṽ
)(x
(i)k ) and update
the particles: x(i)k+1 = x(i)k + εW
(i)k .
To implement the algorithm, we estimate U and Vby ParVIs, which provide various implementationsof Û({x(j)}j)(i) and V̂n({x(j)}j)(i) that approximateU(q)(x(i)) and Vn(q)(x(i)) respectively ({x(j)}j is a set ofparticles of q). Let r be another distribution with particles{y(j)}Mj=1, then the parallel transport Γrq (V ) (y(i)) (here Vis a general tangent vector at q acting as the operand of theparallel transport) can also be estimated by the particles,
and we write the estimator as Γ̂{y(j)}j
{x(j)}j
({V (j)}j
)(i), where
V (j) := V (x(j)). The SVRG for ParVIs algorithm is pre-sented in Algorithm 1, where the estimators Û({x(j)}j)(i),V̂n({x(j)}j)(i) for the vector field and Γ̂
{y(j)}j{x(j)}j
({V (j)}j
)(i)for the parallel transport are detailed below.
4.2. Estimators for the Vector Field
Since ParVI methods are derived for a particle-based numer-ical approximation of the Wasserstein gradient grad KLp(q)in the vector field form, we leverage these different ways ofapproximation to derive respective estimators for our vectorfields U and Vn.
SVGD (Liu & Wang, 2016). According to Liu et al. (2019),SVGD approximates a vector field (element of TqP2 ⊂ L2q)by its projection onto the vector-valued reproducing kernelHilbert space (RKHS) Hm of a kernel K. Adopting this
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
notion, we get the vector field estimators based on SVGD:
V̂n({x(j)}j)(i) = max · argmaxW∈Hm,‖W‖Hm=1
〈Vn(q),W 〉L2q
=1
M
∑j
K̂ij∇ log pn(x(j)),
Û({x(j)}j)(i) = max · argmaxW∈Hm,‖W‖Hm=1
〈U(q),W 〉L2q
=1
M
∑j
(K̂ij∇ log p0(x(j)) +∇x(j)K̂ij
),
where K̂ij := K(x(i), x(j)), and “max · argmax” scalar-multiplies the maximizer with the maximum. The kernelaveraged gradient of the log density drives the particlestowards high probability regions of p, while the other termis a repulsive force between the particles; these two forcesbalance each other so that the particles approximate p.
Blob (Chen et al., 2018a). The Blob method usesa variational formulation of the gradient, by refor-mulating −∇ log q as ∇(− δδqEq[log q]), and approxi-mates q with a smoothed density q̃ := q̂ ∗ K,where q̂ denotes the empirical distribution of the par-ticles and “∗” denotes convolution. The estimatorsare V̂n({x(j)})(i) = ∇ log pn(x(i)), Û({x(j)})(i) =∇ log p0(x(i))−
∑k∇x(i)K̂ik∑
j K̂ij−∑k
∇x(i)
K̂ik∑j K̂jk
.
GFSD (Liu et al., 2019). GFSD directly approximates qin −∇ log q with the smoothed density q̃. The estimatorsare V̂n({x(j)})(i) = ∇ log pn(x(i)) and Û({x(j)})(i) =∇ log p0(x(i))−
∑k∇x(i)K̂ik∑
j K̂ij.
GFSF (Liu et al., 2019). GFSF identifies −∇ log q as thesolution of an optimization problem, and then defines anestimator as the solution of a modified problem by takingq as q̂ and using an RKHS as the optimization domain.The estimators are V̂n({x(j)})(i) = ∇ log pn(x(i)) andÛ({x(j)})(i) = ∇ log p0(x(i)) +
∑k K̂−1ik
∑j ∇x(j)K̂jk.
4.3. Estimators for the Parallel Transport
Schild’s ladder estimator. The Schild’s laddermethod (Ehlers et al., 1972; Kheyfets et al., 2000)constructs a first order approximation to the par-allel transport using the exponential map and
its inverse on the manifold: Γrq(V ) ≈ Exp−1r
(Expq
(2 Exp−1q
(ExpExpq(V )
(12 Exp
−1Expq(V )
(r)))))
. It
is known (Villani (2008), Coro. 7.22; Ambrosio et al.(2008), Prop. 8.4.6; Erbar et al. (2010), Prop. 2.1) thatExpq(V ) = (id +V )#q for absolutely continuous q,which means that if {x(i)}i is a set of samples of q, then{x(i) + V (x(i))}i is a set of samples of Expq(V ). The
inverse exponential map Exp−1q (r) (with q absolutelycontinuous) can be expressed by the optimal transport mapT rq from q to r: Exp
−1q (r) = T rq − id (Ambrosio et al.
(2008), Prop. 8.4.6). In practice, T rq can be estimated bythe discrete optimal transport map from the samples {x(i)}iof q to the samples {y(i)}i of r, which can be done by exactmethods (e.g., Pele & Werman (2009)) or faster approxi-mate methods like the Sinkhorn methods (Cuturi, 2013; Xieet al., 2018). Applying these operations on samples, we get
an implementation of Γ̂{y(j)}j
{x(j)}j
({V (j)}j
)(i).
Pairwise-close estimator. Liu et al. (2019)consider the case where {x(j)}j and {y(j)}jare pairwise close, i.e., d(x(i), y(i)) �min
{minj 6=i d(x
(i), x(j)),minj 6=i d(y(i), y(j))
}. Un-
der this condition, the discrete optimal transport map canbe approximated by T rq (x(i)) ≈ y(i) − x(i), and the aboveparallel transport estimator simplifies to:
Γ̂{y(j)}j{x(j)}j
({V (j)}j
)(i)= V (i).
In our experiments, we use the pairwise-close estimator,which we observed works well empirically. The pairwise-close version simplifies the algorithm and computation.
4.4. SPIDER for ParVIs
We propose applying Riemannian SPIDER (Stochastic PathIntegrated Differential Estimator) (Zhou et al., 2019) as an-other variance reduction method for ParVIs. SPIDER forParVIs uses a recursive equation to estimate the full gradi-ent along the trajectory and employs normalized gradientupdates. In contrast to SVRG, SPIDER only relies on theprevious position instead of a reference snapshot positionfor variance reduction. Instead of using a reference snapshotfull-gradient, SPIDER uses the estimate of the full gradientat the previous position.
At the start of every outer loop, we first compute a fullgradient {W (j)0 }Mj=1 over the entire dataset and then ap-ply normalized gradient ascent. In each of the subsequentiterations k ≥ 1, the stochastic gradient at the currentparticle position {x(j)k }j is combined with the stochas-tic gradient at the previous particle position {x(j)k−1}j andthe previous estimate of the full gradient {W (j)k−1}j to getthe new estimate of the full gradient {W (j)k }j . The parti-cle positions are updated with normalized gradient ascentusing the formula x(i)k+1 ← x
(i)k + εW
(i)k /‖Wk‖, where
‖Wk‖2 = 1M∑Mj=1 ‖W
(j)k ‖2 is the discretization of the L2q
norm. For space reasons, the SPIDER for ParVIs algorithmis presented in the supplement.
4.5. Stochastic Quasi-Newton with Variance Reduction(SQN-VR) for ParVIs
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
Algorithm 2 Stochastic Quasi-Newton with Variance Reduction (SQN-VR) for ParVIs (simplified under pairwise-closeapproximation)
Require: Initial particles {x(j)0 }Mj=1, target distribution p0(x)∏Nn=1 pn(x), number of epochs S, update period Ts, learning
rates ε1, ε2, L-BFGS memory size.Require: Vector field estimators Û({x(j)}j)(i) and V̂n({x(j)}j)(i).
1: Initialize x̃(i)1 ← x(i)0 for i = 1, · · · ,M .
2: Let Ṽ (i)1 ←∑Nn=1 V̂n({x̃
(j)1 }j)(i) for i = 1, · · · ,M .
3: for s = 1, 2, 3, · · · , S do4: Let x(i)0 ← x̃
(i)s for i = 1, · · · ,M .
5: for k = 0, · · · , Ts − 1 do6: Sample a data point nk ∈ {1, · · · , N}.7: Let W (i)k = Û({x
(j)k }j)(i) +NV̂nk({x
(j)k }j)(i) −
(NV̂nk({x̃
(j′)s }j′)(i) − Ṽ (i)s
)for i = 1, · · · ,M .
8: if s > 2 then9: Compute the quasi-Newton update [Z(j)k ]
Mj=1 from [W
(j)k ]
Mj=1 by L-BFGS two-loop recursion.
10: Let x(i)k+1 ← x(i)k − ε2Z
(i)k for i = 1, · · · ,M .
11: else12: Let x(i)k+1 ← x
(i)k + ε1W
(i)k for i = 1, · · · ,M .
13: end if14: end for15: Let x̃(i)s+1 ← x
(i)Ts
for i = 1, · · · ,M .16: Let Ṽ (i)s+1 ←
∑Nn=1 V̂n({x̃
(j)s+1}j)(i) for i = 1, · · · ,M .
17: Let S(i)s+1 ← x̃(i)s+1 − x̃
(i)s for i = 1, · · · ,M .
18: Let Y (i)s+1 ← Û({x̃(j)s+1}j)(i) + Ṽ
(i)s+1 − Û({x̃
(j)s }j)(i) − Ṽ (i)s for i = 1, · · · ,M .
19: Store the L-BFGS pair ([S(j)s+1]Mj=1, [Y
(j)s+1]
Mj=1), and discard the oldest pair if the memory size is exceeded.
20: end for21: return {x̃(i)S }Mi=1.
To address ill-conditioned Bayesian inference problems,we further incorporate quasi-Newton preconditioning tech-niques. Ill-conditioned problems are typically identified byan ill-conditioned Hessian of the objective, which makesthe function landscape distorted along a certain direction.(Quasi-)Newton preconditioning works by stretching theoptimization space to make the landscape more isotropic,resulting in longer-sighted updating direction. In the contextof Bayesian inference, we depict the ill-conditionedness ac-cordingly by the Hessian of the KL divergence on P2, whichis now a quadratic form in the tangent space that general-izes the matrix form to the infinite-dimensional manifold.According to Example 15.9 of Villani (2008), the Hessianoperator takes the form
(Hess KLp(q)
)[V ] =
Eq(x)[‖∇V (x)‖2F − V (x)>
(∇∇> log p(x)
)V (x)
](1)
for Euclidean support space, so its ill-conditionedness isrelated to that of the Hessian matrix∇∇> log p(x).
We propose applying Riemannian Stochastic Quasi-Newtonwith Variance Reduction (SQN-VR) (Kasai et al., 2018) toParVIs. SQN-VR builds on SVRG by leveraging curva-ture information to speed up convergence on ill-conditionedproblems. Like SVRG, SQN-VR computes the variance-
reduced stochastic gradient at every iteration. In SQN-VR,an approximation to the inverse Hessian is computed andapplied to the variance-reduced stochastic gradient to getthe final update direction.
We present the SQN-VR for ParVIs algorithm in Algorithm2 under the pairwise-close assumption. Similarly to SVRG,SQN-VR updates the snapshot position and the correspond-ing full-gradient once in every outer loop. In addition, thecurvature pair of the QN method is updated once in everyouter loop, using the difference between the current andprevious snapshot positions and the difference between theircorresponding full gradients computed for VR.
In the first two outer loops of SQN-VR, before two curvaturepairs have been collected, the SQN-VR update rule eachiteration is the same as the SVRG update rule. After twocurvature pairs are collected, we apply a quasi-Newton up-date every iteration instead of directly applying the variancereduced gradient. Specifically, we use the L-BFGS two-looprecursion (Nocedal & Wright, 2006; Kasai et al., 2018) withthe previous L curvature pairs to apply the inverse Hessianapproximation operator to the variance reduced gradient toget our quasi-Newton update direction.
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
5. Experimental resultsWe present experimental results on Bayesian linear regres-sion and logistic regression. We first describe the experi-mental setup that we use. For the choice of ParVI, we useSVGD with the linear kernel k(x,x′) = 1d+1 (x
Tx′ + 1),where d is the dimension and with mean centering of theparticles, which has been proven to yield exact estimationof the mean and covariance for Gaussian target distributions(Liu & Wang, 2018). We use 100 particles and a batch sizeof 10 in all of our experiments. We initialize the particlesfrom a standard Gaussian, corresponding to the prior.
We compare the following optimization algorithms: Ada-Grad with momentum, SGD, SVRG, SPIDER, and SQN-VR. We note that AdaGrad is not a principled Riemmanianoptimization algorithm, but we include the Euclidean ver-sion of AdaGrad as an empirical algorithm because Ada-Grad has been used in several SVGD papers. For everyoptimizer, we tune the learning rate by running a grid searchover
⋃2k=−1{
10k
N ,3×10kN } where N is the number of data
points. For AdaGrad, we additionally tune the learning ratein⋃5k=3{
10k
N ,3×10kN }, α ∈ {0.9, 0.95, 0.99, 0.999} and the
fudge factor � ∈⋃8k=4{10−k}. For SGD, we decay the
learning rate after each epoch according to the formula�t = a/(t + b)
β where the power β ∈ {0.55, 0.75, 0.95}and the constants a and b are chosen so that the totallearning rate decay over the total number of epochs is in{1, 3, 10, 30, 100, 300, 1000}. For SVRG and SPIDER, weuse a constant learning rate for the first half of the runand decay the learning rate in the second half by a fac-tor in {1, 3, 10, 30, 100, 300, 1000}. For SQN-VR, we usea constant learning rate in
⋃0k=−5{10k, 3 × 10k} for the
quasi-Newton updates and a memory size of 10. For all ofthe variance reduction methods, we update the full gradientover the entire dataset after each epoch, and we first run10 epochs of SGD. The grid search for each optimizer con-sists of all combinations of learning rates and any additionaloptimizer-specific hyperparameters. To ensure a fair com-parison in all of our results, the x-axis in our figures is thenumber of passes over the dataset, specifically the numberof data point gradient evaluations for all of the particlesdivided by the dataset size N . For each dataset, we ensurethat every algorithm is initialized with the same startingpositions for the particles and uses the same sequence oftraining examples throughout.
To evaluate how well the particles approximate the posterior,we consider several metrics related to sample quality. Foreach of the Bayesian linear regression and logistic regres-sion problems, we first obtain a ground truth set of 40,000MCMC samples from a long run of No U-Turn Sampler(NUTS) (Hoffman & Gelman, 2014). Specifically, we usethe implementation of NUTS in PyStan (Carpenter et al.,2017) with a dense mass matrix, and we run 16 chains of
NUTS with 500 burn-in iterations and 2,500 estimation it-erations each. Given this reference set of samples, our firstmetric is Maximum Mean Discrepancy (MMD) (Grettonet al., 2012) between the 100 ParVI particles and the 40,000MCMC samples. We use an RBF kernel for MMD with thekernel bandwidth equal to the median of the pairwise dis-tances between the MCMC samples. From the ground-truthMCMC samples, we can calculate a ground truth posteriormean vector µ and covariance matrix Σ. For a ParVI al-gorithm, let µ̂t be the sample mean and Σ̂t be the samplecovariance of the set of particles at iteration t. We definethe mean squared error (MSE) for a ParVI with respect toµ as 1d‖µ̂t − µ‖
22 and with respect to Σ as
1d2 ‖Σ̂t − Σ‖
2F .
Finally, our last metric is kernel Stein discrepancy (KSD)(Chwialkowski et al., 2016; Liu et al., 2016) for the 100ParVI particles with respect to the posterior distributionp specified by ∇ log p. We evaluate KSD using the IMQkernel proposed by Gorham & Mackey (2017), which hasbeen proven to detect convergence and non-convergence ofa sequence of samples for certain target distributions.
For each optimizer, we run a grid search over all of theoptimizer hyperparameters and choose the hyperparametersthat achieve the minimum MMD at the end of the run as thebest-performing hyperparameters to show in our results.
For each of the datasets, we report the number of data pointsN , the dimensionality D, and the condition number of theposterior covariance matrix Σ, cond(Σ). Note that cond(Σ)is a computable, heuristic approximation of the Hessianof the KL on the Wasserstein space. Equation (1) givesan explicit relationship between the Hessian of the KL onthe Wasserstein space and the Hessian of the log-densityof the target posterior. For Bayesian linear regression, theposterior is Gaussian, so the Hessian of the log-posterioris the negative inverse posterior covariance matrix, whichhas the same condition number as the posterior covariancematrix that we report. For Bayesian logistic regression, theposterior can be approximated well by a Gaussian.
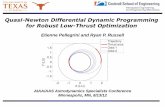
Bayesian linear regression We first consider a Bayesianlinear regression model where the prior on the regressioncoefficients is standard Gaussian. We run experiments on8 UCI regression datasets (Dua & Graff, 2019). For spacereasons, we show results for 3 of the datasets in Fig. 1 andpresent all of the results in the supplement.
In Fig. 1(a), we show results for the noise dataset, which is asmall dataset with 1,503 examples, a low dimensionality of6, and a low posterior covariance matrix condition numberof 12. After running 100 epochs of each optimizer withextensive tuning, we see that the best-performing Adagradand SGD optimizers achieve a MMD of around 10−0.85. Incontrast, all of the variance reduction algorithms achievea MMD of 10−1.38 to 10−1.63. The variance reduction al-
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
0 20 40 60 80 100
# grad / N
−1.50
−1.25
−1.00
−0.75
−0.50
−0.25
0.00
log10(MMD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−7
−6
−5
−4
−3
−2
log10(MSEmu)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−10
−8
−6
−4
−2
log10(MSEcov)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
0.0
0.5
1.0
1.5
2.0
2.5
log10(KSD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−1.6
−1.4
−1.2
−1.0
−0.8
−0.6
−0.4
−0.2
log10(MMD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−4.0
−3.5
−3.0
−2.5
−2.0
log10(MSEmu)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−4.5
−4.0
−3.5
−3.0
−2.5
−2.0
log10(MSEcov)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
1.5
2.0
2.5
3.0
log10(KSD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 100 200 300 400 500
# grad / N
−1.4
−1.2
−1.0
−0.8
−0.6
−0.4
−0.2
log10(MMD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 100 200 300 400 500
# grad / N
−6
−5
−4
−3
−2
log10(MSEmu)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 100 200 300 400 500
# grad / N
−7
−6
−5
−4
−3
−2
log10(MSEcov)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 100 200 300 400 500
# grad / N
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
log10(KSD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
Figure 1. Experimental results for Bayesian linear regression, from top to bottom: (a) noise (b) parkinson (c) toms.
gorithms also achieve a much lower MSE than AdaGradand SGD for estimating µ (10−5.76 to 10−6.70 comparedto 10−4.06 to 10−4.67) and Σ (10−8.66 to 10−9.43 comparedto 10−5.95 to 10−6.79), resulting in much more accurateposterior mean and covariance estimates. The KSD metricprovides further evidence that the variance reduction algo-rithms produce particles with much higher sample quality.
In Figs. 1(b) and 1(c), we consider two more challengingdatasets with significantly higher posterior covariance ma-trix condition numbers. In Fig. 1(b), for the parkinsondataset with N = 5875, D = 21, cond(Σ)=65697, we seethat SQN-VR performs the best after 100 epochs with aMMD of 10−1.56; Adagrad, SGD, and SPIDER achieve aMMD of around 10−1.3, and SVRG achieves a MMD ofaround 10−1.06. Thus, we see that variance reduction alonemight not improve over well-tuned SGD for ill-conditionedproblems. If we compare Adagrad, SGD, and SPIDER interms of MSE for µ and Σ, we notice that SPIDER performsthe best for estimating µ and the worst for estimating Σ,Adagrad performs the best at estimating Σ and the worst forestimating µ, and SGD is in between. While these 3 meth-ods produce particles with similar MMD, the distributionsof the particles are very different, reflected in the differingestimates for µ and Σ. Interestingly, the KSD metric sug-gests that the particles from SGD and Adagrad have worsequality than the particles from SPIDER and SVRG; this
might be due to the less stable optimization procedure. InFig. 1(c), we present results for the toms dataset which has28,179 data points, a high dimensionality of 97, and a highposterior covariance matrix condition number of 45,923.After 500 epochs, the best-performing SQN-VR achievesa MMD of 10−1.34, Adagrad achieves a MMD of 10−0.52,and the other optimizers achieve a MMD no better than10−0.18. For this ill-conditioned problem, we see that SQN-VR is essential for fast convergence and accurate posteriorinference.
Bayesian logistic regression We consider a Bayesian lo-gistic regression model for binary classification where theprior on the regression coefficients is standard Gaussian. Werun 8 Bayesian logistic regression experiments. For spacereasons, we show results for MNIST and covtype in Fig. 2and present all of the results in the supplement.
Our MNIST (LeCun et al., 1998) binary classification prob-lem is classifying digits 7 vs. 9 after applying PCA to reducethe dimension of the image to 50, similar to Korattikara et al.(2014). The MNIST dataset has 12,214 training examplesand a low posterior covariance matrix condition numberof 58. In Fig. 2(a), we see that all of the variance reduc-tion algorithms perform well, achieving a MMD of around10−1.85. In contrast, the best-performing AdaGrad achievesa MMD of 10−0.81 and SGD achieves a MMD of 10−1.01.
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
0 20 40 60 80 100
# grad / N
−1.5
−1.0
−0.5
0.0
log10(MMD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−7
−6
−5
−4
−3
−2
−1
log10(MSEmu)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−8
−7
−6
−5
−4
−3
log10(MSEcov)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
0.5
1.0
1.5
2.0
2.5
3.0
log10(KSD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−1.75
−1.50
−1.25
−1.00
−0.75
−0.50
−0.25
0.00
log10(MMD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−6
−5
−4
−3
−2
−1
0
1
log10(MSEmu)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
−5
−4
−3
−2
log10(MSEcov)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
0 20 40 60 80 100
# grad / N
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
log10(KSD)
SQN-VR
SGD
SVRG
AdaGrad
SPIDER
Figure 2. Experimental results for Bayesian logistic regression, from top to bottom: (a) mnist (b) covtype.
The covtype dataset has 464,809 examples (using a 80%training split), 55 dimensions, and a high posterior covari-ance matrix condition number of 341,266. In Fig. 2(b), wesee that SQN-VR and SPIDER perform the best, achiev-ing a MMD of around 10−1.7, with SVRG following closebehind with a MMD of around 10−1.64. Without variancereduction, the best-performing SGD achieves a MMD of10−1.19 and AdaGrad achieves a MMD of 10−0.19. Look-ing at the other metrics, we observe that the particles fromSGD approximate Σ well but approximate µ poorly andare also worse in terms of KSD. Thus, we see that variancereduction techniques can greatly accelerate the convergenceof ParVIs for real-world datasets of varying size.
6. DiscussionOur experimental results on Bayesian linear regressionand logistic regression demonstrate that existing ParVI ap-proaches using stochastic gradients converge insufficientlyfast and that variance reduction and quasi-Newton methodscan greatly accelerate the convergence of ParVIs for accu-rate posterior inference in large-scale and ill-conditionedproblems. While using variance reduction techniques alonesped up convergence in many large-scale problems, com-bining variance reduction and quasi-Newton techniques ledto significantly faster convergence in several cases and thebest performance on every dataset we considered. Our al-gorithms are applicable to general ParVIs and are based onprincipled Riemannian optimization algorithms.
From the perspective of posterior inference, our new meth-ods produced a set of particles with significantly better sam-ple quality, as measured by MMD and KSD, and betterestimates of posterior expectations, such as mean and co-variance. Accurate posterior inference requires solving the
ParVI optimization problem to a high degree of accuracy, soleveraging Riemannian optimization methods with fast con-vergence and high accuracy is very important. While we dida large grid search to tune the hyperparameters, additionaltuning of the hyperparameters and other techniques, such asadaptive learning rates and mini-batch sizes, could furtherimprove the performance of the optimization algorithms.
In our experiments, we assumed the pairwise close condi-tion, which we observed works well empirically. Underthis assumption, our methods are simple, easy to use, fastin terms of running time, and work well in practice. Inour experiments, we observed that the running times of ourmethods are generally comparable to or slightly faster thanSGD and AdaGrad given the same number of gradient eval-uations. The relative order of running times was generallySVRG ≤ SPIDER ≤ SQN-VR ≤ SGD ≤ AdaGrad. Forexample, on an Intel Xeon E5-2640v3, 100 epochs on thecovtype dataset took 20 minutes for SVRG and SPIDER,22 for SQN-VR, 24 for SGD, and 28 for AdaGrad.
We focused our experiments on Bayesian linear regressionand logistic regression, running SVGD with a linear ker-nel, which works well for Gaussian-like posteriors. In thissetting, we observed that ParVI methods can be highly ac-curate for estimating posterior expectations and producinga small set of particles which represent the posterior whilebeing fast in terms of running time. As an example, onthe challenging covtype dataset, our ParVI implementationtook 22 minutes while 500 burn-in iterations of NUTS took4.5 hours. Using a subset of 100 NUTS samples also givesa very poor representation of the posterior. Future workinvolves studying how well various ParVI methods approx-imate various posterior distributions under sample qualitymetrics to further improve ParVI methods for real-worldBayesian inference problems.
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
AcknowledgementJ.Z was supported by the National Key Research and Devel-opment Program of China (No. 2017YFA0700904), NSFCProjects (Nos. 61620106010), Beijing Academy of Artifi-cial Intelligence (BAAI), Tsinghua-Huawei Joint ResearchProgram, and a grant from Tsinghua Institute for Guo Qiang.
ReferencesAbraham, R., Marsden, J. E., and Ratiu, T. Manifolds,
tensor analysis, and applications, volume 75. SpringerScience & Business Media, New York, 2012.
Ambrosio, L., Gigli, N., and Savaré, G. Gradient flows: inmetric spaces and in the space of probability measures.Springer Science & Business Media, 2008.
Benamou, J.-D. and Brenier, Y. A computational fluid me-chanics solution to the Monge-Kantorovich mass transferproblem. Numerische Mathematik, 84(3):375–393, 2000.
Blei, D. M., Kucukelbir, A., and McAuliffe, J. D. Varia-tional inference: A review for statisticians. Journal ofthe American Statistical Association, 112(518):859–877,2017.
Brooks, S., Gelman, A., Jones, G., and Meng, X.-L. Hand-book of Markov Chain Monte Carlo. CRC Press, 2011.
Byrd, R. H., Hansen, S. L., Nocedal, J., and Singer, Y. Astochastic quasi-Newton method for large-scale optimiza-tion. SIAM Journal on Optimization, 26(2):1008–1031,2016.
Carpenter, B., Gelman, A., Hoffman, M. D., Lee, D.,Goodrich, B., Betancourt, M., Brubaker, M., Guo, J.,Li, P., and Riddell, A. Stan: A probabilistic programminglanguage. Journal of Statistical Software, 76(1), 2017.
Chatterji, N., Flammarion, N., Ma, Y., Bartlett, P., and Jor-dan, M. On the theory of variance reduction for stochasticgradient Monte Carlo. In Proceedings of the 35th Interna-tional Conference on Machine Learning, volume 80, pp.764–773, Stockholmsmässan, Stockholm Sweden, 10–15Jul 2018.
Chen, C., Zhang, R., Wang, W., Li, B., and Chen, L.A unified particle-optimization framework for scalableBayesian sampling. In Proceedings of the Conference onUncertainty in Artificial Intelligence (UAI 2018), Mon-terey, California USA, 2018a. Association for Uncertaintyin Artificial Intelligence.
Chen, W. Y., Mackey, L., Gorham, J., Briol, F.-X., and Oates,C. J. Stein points. arXiv preprint arXiv:1803.10161,2018b.
Chwialkowski, K., Strathmann, H., and Gretton, A. Akernel test of goodness of fit. In Proceedings of the 33rdInternational Conference on Machine Learning (ICML2016), pp. 2606–2615, New York, New York USA, 2016.IMLS.
Cuturi, M. Sinkhorn distances: Lightspeed computationof optimal transport. In Advances in Neural InformationProcessing Systems, pp. 2292–2300, Lake Tahoe, NevadaUSA, 2013. NIPS Foundation.
Defazio, A., Bach, F., and Lacoste-Julien, S. SAGA: Afast incremental gradient method with support for non-strongly convex composite objectives. In Advances inneural information processing systems, pp. 1646–1654,2014.
Detommaso, G., Cui, T., Marzouk, Y., Spantini, A., andScheichl, R. A Stein variational Newton method. InAdvances in Neural Information Processing Systems, pp.9187–9197, Montréal, Canada, 2018. NIPS Foundation.
Do Carmo, M. P. Riemannian Geometry. Birkhäuser, 1992.
Dua, D. and Graff, C. UCI Machine Learning Repository,2019. URL http://archive.ics.uci.edu/ml.
Dubey, K. A., Reddi, S. J., Williamson, S. A., Poczos, B.,Smola, A. J., and Xing, E. P. Variance reduction instochastic gradient Langevin dynamics. In Advancesin neural information processing systems, pp. 1154–1162,2016.
Ehlers, J., Pirani, F., and Schild, A. The geometry of free falland light propagation, in the book “General Relativity”(papers in honour of JL Synge), 63–84, 1972.
Erbar, M. et al. The heat equation on manifolds as a gradientflow in the Wasserstein space. In Annales de l’InstitutHenri Poincaré, Probabilités et Statistiques, volume 46,pp. 1–23. Institut Henri Poincaré, 2010.
Feng, Y., Wang, D., and Liu, Q. Learning to draw sam-ples with amortized Stein variational gradient descent. InProceedings of the Conference on Uncertainty in Arti-ficial Intelligence (UAI 2017), Sydney, Australia, 2017.Association for Uncertainty in Artificial Intelligence.
Gorham, J. and Mackey, L. Measuring sample quality withkernels. arXiv preprint arXiv:1703.01717, 2017.
Gretton, A., Borgwardt, K. M., Rasch, M. J., Schölkopf,B., and Smola, A. A kernel two-sample test. Journal ofMachine Learning Research, 13(Mar):723–773, 2012.
Hoffman, M. D. and Gelman, A. The No-U-turn sampler:adaptively setting path lengths in Hamiltonian MonteCarlo. Journal of Machine Learning Research, 15(1):1593–1623, 2014.
http://archive.ics.uci.edu/ml
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
Johnson, R. and Zhang, T. Accelerating stochastic gradientdescent using predictive variance reduction. In Advancesin neural information processing systems, pp. 315–323,2013.
Kasai, H., Sato, H., and Mishra, B. Riemannian stochasticquasi-Newton algorithm with variance reduction and itsconvergence analysis. In International Conference onArtificial Intelligence and Statistics, pp. 269–278, 2018.
Kheyfets, A., Miller, W. A., and Newton, G. A. Schild’sladder parallel transport procedure for an arbitrary con-nection. International Journal of Theoretical Physics, 39(12):2891–2898, 2000.
Korattikara, A., Chen, Y., and Welling, M. Austerity inMCMC land: Cutting the Metropolis-Hastings budget.In International Conference on Machine Learning, pp.181–189, 2014.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. Gradient-based learning applied to document recognition. Proceed-ings of the IEEE, 86(11):2278–2324, 1998.
Li, Z., Zhang, T., Cheng, S., Zhu, J., and Li, J. Stochasticgradient Hamiltonian Monte Carlo with variance reduc-tion for Bayesian inference. Machine Learning, 108(8-9):1701–1727, 2019.
Liu, C. and Zhu, J. Riemannian Stein variational gradientdescent for Bayesian inference. In The 32nd AAAI Con-ference on Artificial Intelligence, pp. 3627–3634, NewOrleans, Louisiana USA, 2018. AAAI press.
Liu, C., Zhuo, J., Cheng, P., Zhang, R., Zhu, J., and Carin,L. Understanding and accelerating particle-based varia-tional inference. In Proceedings of the 36th InternationalConference on Machine Learning, pp. 4082–4092, LongBeach, California USA, 2019. IMLS.
Liu, Q. Stein variational gradient descent as gradient flow. InAdvances in Neural Information Processing Systems, pp.3118–3126, Long Beach, California USA, 2017. NIPSFoundation.
Liu, Q. and Wang, D. Stein variational gradient descent:A general purpose Bayesian inference algorithm. In Ad-vances in Neural Information Processing Systems, pp.2370–2378, Barcelona, Spain, 2016. NIPS Foundation.
Liu, Q. and Wang, D. Stein variational gradient descent asmoment matching. In Advances in Neural InformationProcessing Systems 31, pp. 8854–8863. 2018.
Liu, Q., Lee, J. D., and Jordan, M. I. A kernelized Steindiscrepancy for goodness-of-fit tests. In Proceedings ofthe 33rd International Conference on Machine Learning(ICML 2016), New York, New York USA, 2016. IMLS.
Liu, Y., Ramachandran, P., Liu, Q., and Peng, J. Steinvariational policy gradient. In Proceedings of the Confer-ence on Uncertainty in Artificial Intelligence (UAI 2017),Sydney, Australia, 2017. Association for Uncertainty inArtificial Intelligence.
Moritz, P., Nishihara, R., and Jordan, M. A linearly-convergent stochastic L-BFGS algorithm. In ArtificialIntelligence and Statistics, pp. 249–258, 2016.
Nocedal, J. and Wright, S. Numerical optimization. SpringerScience & Business Media, 2006.
Otto, F. The geometry of dissipative evolution equations:the porous medium equation. 2001.
Pele, O. and Werman, M. Fast and robust earth mover’sdistances. In Proceedings of the 12th International Con-ference on Computer Vision (ICCV-09), volume 9, pp.460–467, Kyoto, Japan, 2009. IEEE.
Pu, Y., Gan, Z., Henao, R., Li, C., Han, S., and Carin, L.VAE learning via Stein variational gradient descent. InAdvances in Neural Information Processing Systems, pp.4239–4248, Long Beach, California USA, 2017. NIPSFoundation.
Roux, N. L., Schmidt, M., and Bach, F. R. A stochasticgradient method with an exponential convergence rate forfinite training sets. In Advances in neural informationprocessing systems, pp. 2663–2671, 2012.
Roychowdhury, A. and Parthasarathy, S. Acceleratedstochastic quasi-Newton optimization on Riemann mani-folds. arXiv preprint arXiv:1704.01700, 2017.
Villani, C. Optimal transport: old and new, volume 338.Springer Science & Business Media, 2008.
Wainwright, M. J., Jordan, M. I., et al. Graphical models,exponential families, and variational inference. Founda-tions and Trends R© in Machine Learning, 1(1–2):1–305,2008.
Wang, D., Tang, Z., Bajaj, C., and Liu, Q. Stein variationalgradient descent with matrix-valued kernels. In Advancesin neural information processing systems, pp. 7834–7844,2019.
Xie, Y., Wang, X., Wang, R., and Zha, H. A fast proximalpoint method for computing Wasserstein distance. arXivpreprint arXiv:1802.04307, 2018.
Yoon, J., Kim, T., Dia, O., Kim, S., Bengio, Y., and Ahn, S.Bayesian model-agnostic meta-learning. In Advances inNeural Information Processing Systems, pp. 7343–7353,Montréal, Canada, 2018. NIPS Foundation.
Variance Reduction and Quasi-Newton for Particle-Based Variational Inference
Zhang, H., Reddi, S. J., and Sra, S. Riemannian SVRG:Fast stochastic optimization on Riemannian manifolds. InAdvances in Neural Information Processing Systems, pp.4592–4600, Barcelona, Spain, 2016. NIPS Foundation.
Zhang, J., Zhang, R., and Chen, C. Stochastic particle-optimization sampling and the non-asymptotic conver-gence theory. arXiv preprint arXiv:1809.01293, 2018a.
Zhang, J., Zhao, Y., and Chen, C. Variance reduction instochastic particle-optimization sampling. arXiv preprintarXiv:1811.08052, 2018b.
Zhou, P., Yuan, X., Yan, S., and Feng, J. Faster first-ordermethods for stochastic non-convex optimization on Rie-mannian manifolds. IEEE transactions on pattern analy-sis and machine intelligence, 2019.
Zhuo, J., Liu, C., Shi, J., Zhu, J., Chen, N., and Zhang,B. Message passing Stein variational gradient descent.In Proceedings of the 35th International Conference onMachine Learning, pp. 6018–6027, 2018.