Mobile Ad hoc Networks COE 549 Mobility Models II Group Mobility
Upload
umberto-griffoCategory
view
581download
1description

Facoltà di Ingegneria Corso di laurea in Ingegneria Informatica
Tesi di laurea Magistrale in
Ingegneria Informatica
Validation and analysis of mobility models
Relatore Candidato
Prof. Luca Becchetti Umberto Griffo Correlatore
Prof. Leonardo Querzoni
A/A 2011/2012

2
Indice
Introduzione ..................................................................................................... 4
User Mobility .................................................................................................... 8
1.1 Tecnologie ................................................................................................................. 9
1.2 Tracce di mobilità .................................................................................................. 12
1.2.1 CRAWDAD ................................................................................................... 13
1.2.2 SocioPattern ................................................................................................... 14
1.2.3 SocialDIS ........................................................................................................ 17
1.2.4 MACRO .......................................................................................................... 20
Mobility Models ............................................................................................. 27
2.1 Individual mobility models .................................................................................. 29
2.1.1 Random Walk (RW)...................................................................................... 29
2.1.2 Random Waypoint (RWP) ........................................................................... 30
2.1.3 Random Direction (RD) .............................................................................. 32
2.1.4 Truncated Lèvi Walk (TLW) ....................................................................... 33
2.1.5 Boundless Simulation Area (BD) ............................................................... 34
2.1.6 Gauss-Markov (GM) .................................................................................... 36
2.1.7 Probabilistic Random Walk (PRW)............................................................ 38
2.1.8 Weighted Waypoint (WW) .......................................................................... 40
2.2 Group mobility models ........................................................................................ 41
2.2.1 Exponential Correlated Random ................................................................ 41
2.2.2 Column ........................................................................................................... 41
2.2.3 Nomadic Community ................................................................................... 42
2.2.4 Pursue .............................................................................................................. 42
2.2.5 Reference Point Group (RPG) ................................................................... 43
Grafi dinamici................................................................................................. 44
3.1 Definizione del grafo dinamico dei contatti ...................................................... 44
3.2 Definizione del grafo aggregato dei contatti ..................................................... 47
3.3 Indicatori statistici/metriche................................................................................ 47
3.3.1 Indicatori/metriche su grafo aggregato ..................................................... 47
3.3.2 Indicatori/metriche su grafo dinamico ..................................................... 51

3
3.4 Rappresentazioni di grafi dinamici...................................................................... 55
3.4.1 Graph Exchange XML Format (GEXF) .................................................. 56
3.4.2 Dynamic Network Format (DNF) ............................................................. 57
Sistema per l'analisi di grafi dinamici............................................................. 64
4.1 Gephi Platform ...................................................................................................... 64
4.1.1 Gephi Dynamic API ..................................................................................... 67
4.2 DNF Dynamic ....................................................................................................... 68
4.3 DNF Importer ....................................................................................................... 71
4.4 Mobility Model Generator ................................................................................... 72
4.4.1 Mobility Simulator ......................................................................................... 72
4.4.2 Random Waypoint Mobility Model Generator ........................................ 73
4.4.3 Truncated Lèvi Walk Mobility Model Generator .................................... 74
4.5 Indicatori statistici/Metriche ............................................................................... 76
4.5.1 Weighted Clustering Coefficient e Strength ............................................. 76
4.5.2 Flooding time ................................................................................................. 77
4.5.3 Inter-contact time ed Intra-contact time ................................................... 79
4.5.4 Conditional probability Distribution of link's existence ......................... 80
4.5.5 Link's existence variability ........................................................................... 80
4.5.6 Pearson correlation matrix........................................................................... 81
4.6 Ulteriori script e riferimenti ................................................................................. 83
Validazione sperimentale dei modelli di mobilità .......................................... 84
5.1 Comparazione con i dati dell'esperimento SocialDIS ..................................... 86
5.1.1 Modelli nella loro formulazione originaria ................................................ 86
5.1.2 Modelli con aree di simulazione scalate di un fattore 10 ...................... 103
5.2 Comparazione con i dati dell'esperimento MACRO ..................................... 116
5.2.1 Modelli nella loro formulazione originaria .............................................. 116
5.2.2 Modelli con aree di simulazione scalate di un fattore 10 ...................... 130
5.3 Sintesi dei risultati ottenuti ................................................................................. 141
Conclusioni .................................................................................................. 143
6.1 Proposte di sviluppo future ............................................................................... 144
Bibliografia ................................................................................................... 147

4
Introduzione
I modelli di mobilità riproducono i movimenti di utenti mobili assegnando a
ciascuno di essi una posizione, una velocità ed un'accelerazione che cambiano nel
tempo. Nel lavoro svolto in questa tesi è stata condotta un'estesa analisi statistica
volta a indagare l'efficacia di due importanti modelli di mobilità nel riprodurre il
comportamento di tracce reali. A tale scopo è stato fatto uso di tracce di mobilità
raccolte in due esperimenti sociali svolti in due differenti contesti: l'esperimento
SocialDIS, svoltosi a partire dal 17/10/2011 al primo piano del Dipartimento di
Ingegneria informatica automatica e gestionale Antonio Ruberti della Sapienza
Università di Roma, e l'esperimento NeonMACRO, effettuato il 20 Giugno 2012, in
occasione della mostra d'arte NEON, presso il museo d'arte contemporanea di Roma
MACRO.
Tramite una piattaforma RFID-based sono stati tracciati i contatti di
prossimità tra persone in entrambi gli esperimenti. A partire da questi dati, sono stati
costruiti dei grafi dinamici che descrivono l'evoluzione temporale delle interazioni
sociali tra individui, usando un formalismo che consente di memorizzarli più
efficientemente di quanto fosse possibile in passato. Tale formalismo, ideato e
sviluppato in questo lavoro, permette una rappresentazione notevolmente compatta
ed efficiente in termini di occupazione di memoria e manipolabilità.
Per analizzare l'efficacia dei modelli nel riprodurre tracce compatibili con il
reale comportamento di agenti mobili, si sono analizzati e confrontati i grafi dinamici,
ottenuti a partire dagli esperimenti sociali sopra citati, con quelli generati a partire dai
modelli di mobilità Random Waypoint e Truncated Lévy Walk. A tal fine sono stati
sviluppati diversi moduli software basati sul framework Gephi [11] (http://gephi.org),
in particolare per:
simulare la dinamicità temporale del grafo dei contatti con elevate prestazioni,
in termini di tempo di calcolo e quantità di memoria allocata;
importare nella piattaforma Gephi grafi che adottano il nuovo formalismo di
memorizzazione;

5
generare grafi dinamici a partire dal Random Waypoint Mobility Model e dal
Truncated Lévy Walk Mobility Model;
misurare le proprietà statiche (Graph Density, Cluster Coefficient, Weighted
Clustering Coefficient, Strength, Modularity) e dinamiche (Inter-Intra
Contact Time, Conditional probability of link's existence, Link's existence
variability, Matrix correlation) dei grafi dinamici da confrontare.
I grafi dinamici costruiti sono stati analizzati sia in forma aggregata che in
forma dinamica, rispettivamente aggregando le interazioni a distanza ravvicinata per
intervalli di tempo che vanno dalle 2 ore (nel caso NeonMACRO) alle 12 ore (nel
caso SocialDIS), e valutando l'evoluzione dei contatti secondo per secondo.
Le prime analisi condotte mostrano che nel caso SocialDIS tipicamente gli
individui hanno contatti di prossimità prevalentemente con altri individui con cui
hanno stretto un legame d'amicizia e raramente con altri individui sconosciuti,
mentre nel caso NeonMACRO le persone tendono a comunicare soprattutto con
quelle che appartengono alla stessa comitiva e sporadicamente con tutte le altre.
Questo comportamento tipico degli individui, riscontrato negli esperimenti,
non viene catturato dai modelli di mobilità RWP e TLW i quali sono stati
opportunamente configurati per riprodurre in modo realistico il movimento delle
persone nei due differenti contesti. In particolare, una differenza fondamentale
emerge confrontando i risultati forniti dalle metriche statiche applicabili sui grafi
aggregati e dalle metriche dinamiche applicabili su quelli non aggregati. Gli agenti che
si muovono secondo questi due modelli di mobilità tendono a comunicare con quasi
tutti gli altri agenti e tendono a produrre intervalli tra contatti successivi che
mediamente risultano eccessivamente lunghi.
Successivamente si sono investigate importanti differenze temporali indotte dai
modelli e presenti anche nelle tracce reali. I modelli RWP e TLW mostrano inoltre
significative correlazioni spaziali tra contatti distinti, sia simulando quanto avviene in
SocialDIS che nel NeonMacro. Analizzando gli schemi delle comunicazioni in
SocialDIS si è riscontrato che la correlazione spaziale tra contatti distinti risulta
essere esigua, mentre risulta essere leggermente maggiore in NeonMACRO.
Infine, attraverso l'implementazione di un semplice protocollo di flooding si sono
investigate le proprietà diffusive dei grafi prodotti dalle tracce reali e le si sono

6
confrontate con quelle dei modelli. E' stato appurato che entrambi i modelli, proprio
per il fatto di generare un elevato numero di comunicazioni che coinvolgono quasi
tutti gli individui, falliscono nel rappresentare il comportamento diffusivo mostrato
dagli esperimenti SocialDIS e NeonMACRO. La totalità dei risultati statistici di
questo studio hanno permesso di chiarire quali sono i limiti dei modelli di mobilità
adottati nella sperimentazione, almeno nel tipo di scenari considerati, in modo da
comprendere quali possano essere le modifiche da apportare per ottenere dei modelli
più realistici.
La tesi è strutturata come segue:
Capitolo 1: vengono illustrate quali tecnologie consentono la raccolta di
tracce di mobilità nei casi reali, le più recenti tracce di mobilità collezionate e
rese disponibili dal mondo accademico e quelle invece ottenute dagli
esperimenti che sono stati condotti nell'ambito del lavoro di tesi.
Capitolo 2: viene data la definizione dei dataset sintetici e i modelli di
mobilità, fornendo di questi ultimi una classificazione e successivamente
illustrando quelli più usati per riprodurre il comportamento di dispositivi
mobili in reti ad hoc.
Capitolo 3: viene data la definizione dei grafi dinamici dei contatti e come
possono essere costruiti a partire dai dati collezionati nei casi reali e da quelli
ottenuti nei casi simulati con i modelli di mobilità adottati. In seguito
vengono definiti gli indicatori statistici/metriche che sono stati implementati
per poter condurre l'analisi statistica (trattata nel Capitolo 5), le limitazioni del
formato attualmente più utilizzato per la scrittura di grafi dinamici su file e il
nuovo formato che è stato ideato per superarle.
Capitolo 4: vengono presentati i moduli software sviluppati sulla piattaforma
Gephi con lo scopo di simulare la dinamicità temporale del grafo dei contatti,
importare grafi dinamici memorizzati secondo un nuovo formalismo,
generare grafi dinamici a partire dai modelli di mobilità e calcolare gli
indicatori statistici/metriche.

7
Capitolo 5: vengono illustrati e motivati i risultati dell'analisi e validazione
sperimentale condotta confrontando i comportamenti degli individui tracciati
negli esperimenti SocialDIS e NeonMACRO, con i comportamenti degli
individui i cui movimenti sono stati dettati dai modelli di mobilità Random
Waypoint e Truncated Lévy Walk.
Capitolo 6: vengono presentate le considerazioni finali e i possibili sviluppi
futuri.

8
Capitolo 1
User Mobility
La crescente diffusione e popolarità di dispositivi equipaggiati con interfacce di rete
wireless, come ad esempio gli smartphone di ultima generazione, rende possibile
collezionare nuove sorgenti dati, che descrivono il movimento e comportamento di
individui nei più disparati ambienti e contesti. L'accesso a tali collezioni di dati,
permette di investigare sulle interazioni delle reti sociali e sull'evoluzione di processi
dinamici, come la diffusione di un'informazione, la formazione di un'opinione, o un
processo epidemico.
Esistono due tipi di data set usati per valutare processi e protocolli applicabili
alle reti mobili: dataset empirici (o Empirical dataset), collezionati catturando i dati dai
comportamenti reali dei dispositivi mobili, ovvero memorizzando le reali tracce di
mobilità dei dispositivi mobili, o dataset sintetici (o Synthetic dataset), creati usando i
modelli di mobilità, che provano a riprodurre il comportamento dei dispositivi mobili
senza usare tracce di mobilità reali.
I dati provenienti dal mondo reale consentono di capire gli schemi di
comportamento che gli esseri umani adottano nelle loro attività. Quando si vogliono
collezionare tali dati, le caratteristiche che interessa conoscere sono: posizione,
direzione, velocità e tempo di pausa. Esistono diverse tecnologie che permettono di
ottenere dati accurati sulle posizioni dei dispositivi, come i sensori GPS-based o
Radio-based, ed esistono gli accelerometri per catturare i valori di velocità, direzione
e tempo di pausa.
Queste tecnologie possono essere classificate in base a quanto accuratamente
riescono ad individuare la posizione di un dispositivo. Ad esempio utilizzando le reti
cellulari GSM/UMTS, la posizione dell'utente può essere determinata tramite varie
tecniche che permettono la sua localizzazione con un errore di massimo 50-150m,
mentre con le tecnologie GPS, si arriva ad un errore massimo di 10-100m.

9
Esiste un approccio alternativo per collezionare dati sui movimenti degli
individui, basato solo sulla raccolta dei contatti che avvengono tra di loro. Vengono
dunque raccolte le tracce dei contatti al posto delle tracce di mobilità, omettendo tutti
i dati relativi a posizione, direzione, velocità e tempi di pausa, in modo da simulare
solo le comunicazioni tra dispositivi.
Per quanto concerne il lavoro svolto in questa tesi, è trovato interessante
questo secondo approccio, ovvero collezionare dati generati da reti dinamiche di
contatti (o dynamic contact network), ossia grafi che rappresentano le interazioni
face-to-face o di prossimità tra individui. Catturando trace di mobilità, basate sui
contatti reali, si possono osservare i veri comportamenti di tali individui.
Nei prossimi sottoparagrafi saranno illustrate, quali tecnologie consentono la
raccolta di tracce di mobilità nei casi reali, le più recenti tracce di mobilità raccolte e
rese disponibili dal mondo accademico e quelle invece ottenute dagli esperimenti che
sono stati condotti nell'ambito del lavoro di tesi.
1.1 Tecnologie
Collezionare dataset realistici e di grandi dimensioni su attività e interazioni umane è
un processo difficile e costoso. Al fine di costruire dataset empirici, ossia tracciare i
comportamenti umani, sono stati usati dispositivi mobili cellulari o smartphone,
laptop con schede di rete wireless e sensori wireless (ad esempio iMote), utilizzando
reti di comunicazione di tipo Bluetooth e WiFi [30],[31],[32].
L'uso delle reti WiFi risulta essere, come dimostrato negli esperimenti
condotti dall'Università di Dartmouth [33] e da quella di San Diego [41] , inaccurato
nel costruire tracce di mobilità realistiche tra dispositivi mobili. Utilizzando la
tecnologia WiFi i dati sulle interazioni device-to-device vengono raccolti assumendo
che i dispositivi mobili, che entrano nel raggio di comunicazione dello stesso AP
(access point), possono comunicare direttamente tra di loro, ossia i contatti vengono
registrati al tempo in cui i due dispositivi condividono lo stesso AP.
Sfortunatamente, questa assunzione non è realistica, perché due dispositivi
collegati allo stesso access point non è detto che siano uno nel raggio di copertura
dell'altro, e viceversa, possono essere nei rispettivi raggi di copertura e non
condividere lo stesso AP. In quest'ultimo caso l'interazione non viene registrata
rendendo i dati raccolti poco realistici.

10
Inoltre un'altra problematica relativa alla tecnologia Wifi consiste nel fatto
che i dispositivi non sono sempre situati nello stesso punto dove si trova il
proprietario, pertanto i dati ottenuti non esprimono sempre i comportamenti di
mobilità degli individui. La tecnologia Bluetooth, utilizzata nell'esperimento [34]
condotto presso l'università di Toronto, dove le tracce di mobilità sono state
collezionate da 20 cellulari distribuiti a gruppi di studenti, permette di collezionare
contatti senza che i dispositivi debbano essere nel raggio di comunicazione dell'AP,
ma allo stesso tempo richiede che il cellulare sia trasportato dai soggetti e che esso
abbia una batteria con un'autonomia sufficiente per la durata dell'intero esperimento.
Se i cellulari vengono ricaricati, si possono condurre lunghi esperimenti, ma
ovviamente per essere ricaricato, il cellulare deve essere fermo e probabilmente
distante dal proprietario, ottenendo la stessa problematica illustrata per il caso WiFi.
Tracce di mobilità sono state collezionate anche con l'uso di sensori Intel iMote,
utilizzando sempre la tecnologia Bluetooth.
Essi registrano un contatto quando un dispositivo Bluetooth qualsiasi (sia un
altro iMote che un PDA) entra nel suo raggio di copertura. Tramite questa tecnologia
sono state raccolte tracce di mobilità in contesti differenti [30], ad esempio durante la
conferenza IEEE INFOCOM 2005 di Miami [48], dove 41 iMote sono stati
trasportati dai partecipanti per 3 giorni, o presso un laboratorio di ricerca della
Università di Cambrige, dove sono stati registrati i comportamenti e le tracce di
mobilità di 12 studenti di dottorato.
Utilizzando le tecnologie Bluetooth e Wifi si possono raccogliere dati che
rivelano proprietà strutturali e temporali di schemi di comportamento sociali, ma
oltre che per i problemi già illustrati, queste tecnologie non sono adatte a rilevare
contatti di prossimità (o face-to face) tra dispositivi, dal momento che possiedono
una risoluzione spaziale massima di 10 metri e temporale di 2-5 minuti che non ci
permette di stabilire se due individui comunicano uno di fronte all'altro a distanza
ravvicinata (ad esempio 1 metro).
Tali limitazioni possono essere superate attraverso l'uso dei dispositivi RFID
(Radio Frequency Identification) [35],[65] RFID, una tecnologia per l'identificazione
automatica di oggetti, animali o persone, basata sulla capacità di memorizzazione di
dati da parte di particolari dispositivi elettronici (detti tag o transponder) e sulla
capacità di questi di rispondere "all'interrogazione" a distanza, da parte di appositi

11
apparati fissi o portatili chiamati reader a radiofrequenza, comunicando (o
aggiornando) le informazioni in essi contenute.
I tag RFID sono dei dispositivi dalle piccole dimensioni, facilmente
indossabili da individui, che permettono di stabilire con accuratezza se questi sono in
prossimità l'uno dell'altro. Questo perché i dispositivi possono scambiarsi pacchetti
radio a bassa frequenza solo quando due persone si trovano ad una distanza che va
da 1 a 1.5 m e sono una di fronte all'altra, in quanto il corpo umano costituisce una
barriera a radio frequenze per la frequenza portante usata per la comunicazione.
In tale contesto, la tecnologia RFID è stata adottata ed utilizzata dalla
piattaforma SocioPatterns (http://www.sociopatterns.org) [36], un framework sperimentale
RFID-based che permette di raccogliere dati sulle interazioni face-to-face tra
individui che interagiscono a distanza ravvicinata. Durante gli esperimenti
SocioPatterns [37],[38],[39],[40] i partecipanti indossano dei piccoli tag RFID.
Quando gli individui indossano i tag continuamente vengono inviati pacchetti
dati in broadcast. Quando una relazione di prossimità (o contatto) viene rilevata, il
dispositivo invia un messaggio ad alta potenza. Questo pacchetto dati contiene un
time stamp, l'id della stazione (RFID reader) che lo ha ricevuto e l'id dei tag che
hanno partecipato nell'interazione. Il messaggio ricevuto dagli RFID reader,
posizionati in modo fisso nell'ambiente, viene memorizzano localmente dal reader ed
inoltrato ad un server centrale tramite rete LAN (Local Area Network), in modo da
processare le informazioni in modalità online o offline.
I tag RFID e I reader RFID usati negli esperimenti SocioPatterns, e negli
esperimenti condotti nella tesi, sono stati creati ed ottenuti dal progetto OpenBeacon
(http://www.openbeacon.org/). In figura 1.1 viene mostrata l'immagine di un tag RFID.

12
Fig.1.1: Viene mostrato come si presenta un tag RFID.
1.2 Tracce di mobilità
Studiare le interazioni sociali di prossimità e gli schemi di comportamento tra
individui, analizzando tracce di mobilità reali, permette di fare luce su diversi
fenomeni studiati in varie aree di ricerca. A tal fine può risultare utile analizzare
collezioni di dati raccolte e rese disponibili dal mondo accademico, oppure, come è
stato fatto nel lavoro di tesi, condurre esperimenti dove vengono collezionate tracce
di contatti utilizzando una piattaforma RFID-based.
Nei prossimi quattro sottoparagrafi saranno illustrati rispettivamente, i data
sets forniti dalla Community Resource for Archiving Wireless Data di Dartmouth
(CRAWDAD) [43], i data sets raccolti durante gli esperimenti SocioPatterns [36], i dati
collezionati nel progetto SocialDIS [44] presso il Dipartimento di Ingegneria
informatica automatica e gestionale Antonio Ruberti della Sapienza Università di
Roma, e quelli ottenuti nel progetto MACRO [45] svoltosi presso il museo d'arte
contemporanea di Roma MACRO. Questi ultimi due data set sono stati collezionati
utilizzando i dispositivi ottenuti dal progetto OpenBeacon (http://www.openbeacon.org/),

13
in collaborazione con il Wireless Sensor Network group [46] del Dipartimento di
Ingegneria informatica automatica e gestionale Antonio Ruberti della Sapienza
Università di Roma.
1.2.1 CRAWDAD
La Community Resource for Archiving Wireless Data di Dartmouth (CRAWDAD) [43] è
un gruppo di ricerca, che ha costruito un repository (raggiungibile al seguente sito
http://crawdad.cs.dartmouth.edu/data.php), dove vengono fornite trace di mobilità
a chiunque lavori nell'ambito delle reti wireless o con dispositivi mobili.
Questa raccolta contiene decine di dataset, ma solo quelli che descriveremo
raccolgono tracce di contatti, utili per l'analisi della mobilità di individui.
Cambridge/Haggle
Nell'articolo [48] è stato descritto un esperimento che ha coinvolto 41 partecipanti
presso la conferenza INFOCOM 2005 a Miami. Nello studio è stato mostrato che le
distribuzioni degli intervalli di tempo durante il quali due nodi possono comunicare,
hanno un andamento di tipo power-law. Per collezionare le tracce di contatti è stata
utilizzata la tecnologia Bluetooth, di cui sono forniti i dispositivi Intel iMote.
Tali dispositivi, costituiti da un processore ARM, una radio Bluetooth e una
memoria flash, sono stati confezionati e distribuiti a volontari, che si sono impegnati
a trasportarli durante il loro spostamenti per tutta la durata della conferenza. Le
tracce dei contatti degli individui sono state collezionate eseguendo la procedura di
inquiry, ossia l'identificazione, da parte di un dispositivo, dei vicini che si trovano nel
suo raggio di copertura.
Lo stato di inquiry dura cinque secondi, dopo i quali il dispositivo entra in
modalità standby per 120 secondi, più ±12 secondi, valore scelto estraendo un
numero casuale da una distribuzione uniforme. Il numero di secondi casuali serve ad
evitare che due dispositivi possano eseguire l'inquiry simultaneamente senza riuscire a
vedersi l'uno con l'altro. Quando viene rilevato un contatto, vengono registrati gli
indirizzi MAC dei due dispositivi che hanno comunicato, il tempo in cui avviene
l'interazione e il tempo in cui la comunicazione termina.

14
MIT/Reality Mining
Nathan Eagle nell'articolo [49], per ottenere gli indirizzi MAC di cellulari Bluetooth
ha sviluppato l'applicazione BlueAware, un software che registra i timestamp e gli
indirizzi MAC dei dispositivi che si trovano in prossimità l'uno dell'altro, nello
specifico di 60 cellulari con sistema operativo Symbian.
L'applicazione riceve dal dispositivo Bluedar, un cellulare posizionato
nell'ambiente di studio che scansiona tutti i dispositivi visibili nel raggio di 25m, gli
indirizzi MAC, attraverso una rete 802.11b. L'esperimento Reality Mining ha
collezionato dati da 100 smartphone Nokia 6600 per nove mesi, scaricabili sia dal
repository del CRAWDAD, sia dal sito del progetto (http://reality.media.mit.edu).
1.2.2 SocioPattern
La Piattaforma RFID-based SocioPatterns ha collezionato tracce di mobilità,
disponibili sul sito web http://www.sociopatterns.org/dataset/, in diversi ambienti e
contesti. Bisogna tenere presente, che la piattaforma SocioPatterns non effettua un
tracciamento delle traiettorie e delle localizzazioni spaziali accurato, ma si focalizza
sul raccogliere accuratamente i contatti di prossimità tra individui, basandosi sulle
proprietà topologiche e temporali della mobilità dei nodi. Questa piattaforma rileva e
registra i contatti tra nodi solo attraverso lo scambio di pacchetti dati a bassa potenza,
come descritto nel paragrafo 1.2.
Infectious SocioPatterns dynamic contact networks.
All'esibizione scientifica Infectus: Stay Away presso la Science Gallery di Dublino,
Irlanda, dal 17 aprile al 17 giugno 2009, dove hanno partecipato circa 30000
visitatori, vengono mostrate opere artistiche raffiguranti i meccanismi di contagio di
un virus. In questa occasione è stato collezionato un dataset contenente le reti
dinamiche di contatti giornaliere.
Dal listato 1.1, si osserva che ciascun file è costituito da righe nella forma
“𝑡 𝑖 𝑗“, dove 𝑖 e 𝑗 sono gli ID anonimi delle persone che sono entrate in contatto, e
l'intervallo durante il quale il contatto è attivo è [ 𝑡 − 20𝑠, 𝑡 ]. Se in un dato
intervallo ci sono più contatti attivi, nel file verranno viste più righe che cominciano
con lo stesso valore di 𝑡. Il tempo è misurato in secondi ed espresso nel formato
UNIX time. Questo dataset è la controparte dinamica della rete di contatti aggregata

15
giornalmente, disponibile in formato GML (Graph Modelling Language) [48], un
formato di file di testo che rappresenta grafi con una sintassi veramente semplice.
Nel listato 1.2 ne viene fornito un semplice esempio, dove si definisce un grafo
costituito da tre nodi A, B e C collegati da due archi che collegano B ad A e C ad A.
Primary school.
In una scuola elementare a Lione, Francia, dal 1 al 2 Ottobre 2009, sono stati
raccolti dati sulle interazioni face-to-face tra 232 bambini e 10 insegnanti distribuiti in
10 aule. I dataset comprendono due reti pesate di contatti avvenuti tra studenti ed
insegnati, ciascuna per ognuno dei due giorni. Ciascuna rete di contatti giornaliera è
costituita da: i nodi, che sono gli individui e gli archi, che rappresentano le interazioni
face-to-face.
I nodi hanno un attributo che indica la classe di appartenenza dell'individuo,
ad esempio gli insegnanti hanno assegnato il valore "Teacher". Gli archi tra il nodo A
e il nodo B hanno due pesi associati: durata, che è il tempo totale per cui A e B
hanno avuto un contatto durante una singola giornata, misurato in secondi;
contatore, che è il numero di volte che il contatto tra A e B è avvenuto durante una
giornata scolastica.
Le reti sono scaricabili come due file GEXF (Graph Exchange XML Format,
http://gexf.net/), uno per ogni giorno di raccolta. Questo formato sarà descritto in
modo più approfondito nel capitolo 3, quando verrà illustrato un nuovo formalismo
ideato e sviluppato nel lavoro di tesi.
Hypertext 2009 dynamic contact network.
Alla ventesima edizione della ACM Conference on Hypertext and Hypermedia
(HT09) a Torino, dal 29 giugno al 1 luglio 2009, dove il team del SocioPatterns
project ha installato l'applicazione Live Social Semantics [39]. I partecipanti alla
conferenza hanno volontariamente indossato dei radio badge che monitorano i loro
contatti di prossimità. Il dataset pubblicato sul sito del progetto, che rappresenta la
rete dinamica di contatti di ~110 partecipanti, è costituito da due file:
Contact List: è una lista separata da tabulazioni che rappresenta i contatti attivi
durati intervalli di 20 secondi. Ciascuna riga del file ha la forma “𝑡 𝑖 𝑗“, dove 𝑖 e 𝑗
sono gli ID anonimi delle persone che sono entrate in contatto, e l'intervallo

16
durante il quale il contatto è attivo è [ 𝑡 − 20𝑠, 𝑡 ]. Se in un dato intervallo ci
sono più contatti attivi, nel file verranno viste più righe che cominciano con lo
steso valore di 𝑡. Il tempo è misurato in secondi ed espresso nel formato UNIX
time.
Contact Intervals: è un file in formato JSON (http://www.json.org/) che contiene
un dizionario, dove ciascuna chiave è l'ID di una persona e il corrispondente
valore è il dizionario dei vicini di quella persona. Il dizionario dei vicini ha una
chiave con l'ID della persona e per ogni chiave, il valore relativo è la lista di
intervalli temporali durante i quali il corrispondente contatto è attivo. Nel listato
1.3 viene mostrato un esempio.
1240913019 78577671 77922321
1240913019 78577671 96403467
1240913019 77922321 96403467
1240913039 78577671 77922321
1240913039 77922321 96403467
1240913059 78577671 77922321
1240913059 77922321 96403467
1240913079 78577671 77922321
1240913079 77922321 96403467
1240913099 96403467 77922321
1240913099 96403467 78577671
1240913099 77922321 78577671
1240913179 77922321 96403467
Listato.1.1: Viene mostrato un frammento del file contenente la lista di contatti
dinamici del 28/04/2009, collezionati durante l'esibisione Infectus: Stay Away.
graph
[
node
[
id A
]
node
[
id B
]
node
[
id C
]
edge
[

17
source B
target A
]
edge
[
source C
target A
]
]
Listato.1.2: Questo semplice codice mostra come definire un grafo di tre nodi e due
archi.
"1144": {
"1336": [[203800, 203820]],
"1214": [[192300, 192320], [192400, 192420], [192500, 192600],
"1215": [[207600, 207620]],
"1155": [[181620, 181640]],
"1204": [[194040, 194060]],
"1149": [[44920, 44940], [54840, 54860], [86680, 86700 [88360, 88380]],
"1228": [[100680, 100700]],
"1191": [[195320, 195340]],
"1360": [[106560, 106580], [106620, 106700], [146640, 146660]]
},
Listato.1.3: Esempio rappresentazione di grafo dinamico tramite il formato JSON.
1144 è la chiave che identifica una persona. Il valore associato alla chiave contiene la
lista degli ID dei suoi vicini. Per ogni chiave rappresentante l'ID del vicino e
associato come valore la lista degli istanti temporali in cui c'è stato il corrispettivo
contatto.
1.2.3 SocialDIS
Il primo esperimento che è stato condotto, chiamato da ora in poi SocialDIS,
si è svolto al primo piano del Dipartimento di Ingegneria informatica automatica e
gestionale Antonio Ruberti della Sapienza Università di Roma. A partire dal
17/10/2011 sono stati tracciati per quattro giorni, in modo assolutamente anonimo, i
movimenti e i contatti di prossimità tra gli studenti che si sono offerti volontari.
Hanno aderito all'esperimento circa 120 studenti, che hanno indossato un tag
RFID attivo per tutta la durata della loro permanenza nel dipartimento. Come viene
mostrato in figura 1.2, sono stati installati 20 lettori RFID al primo piano
dell'edificio, distribuendoli in tutte le aule, nella segreteria, nella sala studio, nella

18
presidenza e nel dispaccio (stanza dove vengono venduti cibi e bevande agli
studenti).
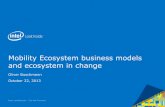
Fig.1.2: La figura mostra come gli RFID reader, identificati dai pallini neri, siano
posizionati nelle in tutte le stanze e nei corridoi del primo piano del primo piano del
Dipartimento di Ingegneria informatica automatica e gestionale Antonio Ruberti
della Sapienza Università di Roma. I pallini azzurri identificano gli studenti che si
trovano in prossimità dei lettori di tag RFID ad un determinato istante temporale.
I tag RFID indossati dagli studenti, periodicamente diffondono in broadcast
pacchetti radio a bassa frequenza contenenti informazioni riguardo, la loro posizione
e i contatti ravvicinati che hanno con uno o più individui. I dispositivi, che sono stati
fatti indossare agli individui, sono stati sviluppati dal progetto OpenBeacon
(http://www.openbeacon.org).
Quando un tag RFID rileva un contatto con un altro tag, ossia due studenti si
trovano uno di fronte all'altro ad una distanza che va da 1 a 1.5 m, invia un
messaggio ad alta potenza verso il reader più vicino. Questo pacchetto dati contiene
un time stamp, l'id del reader che lo ha ricevuto e l'id dei tag che hanno partecipato
nell'interazione. Il messaggio ricevuto dai reader viene memorizzato localmente ed
inoltrato tramite rete LAN (Local Area Network) ad un server centrale, che
colleziona e memorizza i dati, processabili successivamente offline. Alla fine

19
dell'esperimento è stato collezionato un dataset di 250 MB, contenente tutte le
interazioni avvenute durante l'esperimento, visualizzabili sotto forma di grafo pesato
in figura 1.3.
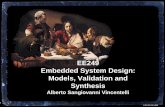
Fig.1.3: Vengono mostrate le interazioni sociali tra gli studenti durante l'esperimento
SocialDIS. La grandezza e il colore di un nodo indica il numero di vicini. I nodi
piccoli e verdi hanno poche relazioni con gli altri nodi, mentre quelli grandi e blu
hanno tante relazioni con gli altri nodi. Lo spessore dell'arco indica quanto
frequentemente due persone interagiscono. Un arco sottile indica poche interazioni
tra due persone, mentre un arco spesso indica che ci sono state molte interazioni tra
due persone.

20
Nel grafo ciascun nodo rappresenta un visitatore e ciascun arco rappresenta il
contatto avvenuto tra due individui. La grandezza ed il colore di ciascun nodo e il
peso ed il colore di ciascun arco rappresentano la rispettiva frequenza, ossia il
rapporto tra il numero di secondi in cui esso esiste e la durata totale dell'esperimento.
Un esempio di informazione che si può ottenere da tale dataset è: Il tag con
id xxxx ha incontrato il tag con id yyyy nella stanza Alpha oppure il tag con id xxxx è
vicino alla stanza Beta. In alcun modo possiamo risalire alla vera identità della
persona a cui è associato il tag con id xxxx.
Inoltre a ciascun studente è stato chiesto di fornirci le seguenti informazioni
personali in forma anonima:
Età
Sesso (maschio/femmina)
Status (corso di studi e anno accademico)
Con le trace di contatto che sono state ottenute dall'esperimento possiamo
analizzare le relazioni tra individui: analizzare gli spazi condivisi (aule, corridoi,
segreteria), analizzare le relazioni tra studenti, ad esempio individuando la formazione
di comunità o cluster.
Nel capitolo 5 si vedrà, utilizzando le metriche definite e descritte nel capitolo
3, se i modelli di mobilità (descritti nel capitolo 2) generano grafi dinamici, con
proprietà topologiche e temporali vicine a quelle possedute dal grafo dinamico
ottenuto dal dataset empirico relativo all'esperimento condotto.
Per quanto concerne il tracciamento della mobilità degli studenti, precisiamo
che, non effettuiamo un tracciamento delle traiettorie e delle localizzazioni spaziali
accurato, ma raccogliamo solamente i contatti di prossimità tra individui. Possiamo
solamente conoscere la posizione dello studente, ossia in che stanza o corridoio si
trova, in base a quale lettore RFID riceve il segnale ad alta potenza inviato dal tag.
1.2.4 MACRO
Il 20 Giugno 2012 è stato effettuato un secondo esperimento simile a SocialDIS,
presso il museo d'arte contemporanea di Roma MACRO, chiamato da ora in poi
NeonMACRO. Durante la mostra d'arte NEON, sono stati tracciati in modo
completamente anonimo i movimenti dei visitatori (ad esempio, quale opera un

21
visitatore sta guardando e per quanto tempo), i contatti di prossimità tra i visitatori
che hanno accettato di partecipare all'esperimento.
I circa 120 visitatori aderenti all'iniziativa, hanno indossato un tag RFID
attivo per tutta la durata della loro visita nella sala Enel del museo. Come viene
mostrato in figura 1.4, sono stati installati 8 lettori RFID nella sala espositiva,
posizionandoli vicino le opere d'arte principali. I tag RFID indossati dai visitatori,
come nell'esperimento SocialDIS, periodicamente diffondono in broadcast pacchetti
radio a bassa frequenza contenenti informazioni riguardo, la loro posizione e i
contatti ravvicinati che hanno con uno o più soggetti. Anche in questo caso, i
dispositivi sono stati ottenuti dal progetto OpenBeacon (http://www.openbeacon.org).
Fig.1.4: La figura mostra come gli RFID reader, identificati dai pallini neri, siano
posizionati le opere d'arte esibite al museo d'arte contemporanea di Roma MACRO.

22
Quando due visitatori si trovano uno di fronte all'altro ad una distanza che va
da 1 a 1.5 m, il rispettivo tag indossato rileva il contatto ed invia un messaggio ad alta
potenza verso il reader più vicino. Il pacchetto dati inviato, contiene un time stamp,
l'id del reader che lo ha ricevuto e l'id dei tag che hanno partecipato nell'interazione.
Il messaggio ricevuto dai reader viene, anche questa volta, memorizzato
localmente ed inoltrato tramite rete LAN (Local Area Network) ad un server
centrale, collocato in quella che viene chiamata "Area", un open space del museo
dove i visitatori possono rilassarsi, conoscere altre persone e condividere idee.
Il server colleziona e memorizza i dati, che saranno successivamente
processati ed analizzati offline. Alla termine dell'esperimento è stato raccolto un
dataset di 10 MB. In figura 1.5 possiamo visualizzare, sottoforma di grafo pesato,
tutte le interazioni tra visitatori avvenute durante l'esperimento.
Fig.1.5: Vengono mostrate le interazioni sociali tra le persone durante l'esperimento
NeonMACRO. I visitatori più sociali sono rappresentati da cerchi grandi e di colore
scuro. Lo spessore degli archi dipende dalla frequenza con cui avviene l'interazione
tra due visitatori.

23
Ciascun nodo rappresenta un visitatore e ciascun arco rappresenta il contatto
avvenuto tra due individui. La grandezza di ciascun nodo e il peso di ciascun arco
rappresentano la rispettiva frequenza, ossia il rapporto tra il numero di secondi in cui
esso esiste e la durata totale dell'esperimento.
Questo permette di visualizzare immediatamente nel grafo quali siano i
visitatori più socievoli e quelli meno socievoli. A ciascun visitatore è stato chiesto di
fornire le seguenti informazioni in forma anonima:
Età
Sesso (maschio/femmina)
Titolo di studio
Area professionale
Nazionalità (Italiano o non Italiano)
Gruppo (se un visitatore è entrato nella sala accompagnato da altre persone, a
ciascun membro del gruppo viene associato l'identificativo del gruppo )
La raccolta di queste ulteriori informazioni ha permesso di effettuare delle
semplici ed immediate analisi sul comportamento dei visitatori. In figura 1.6 si
possono visualizzare le interazioni tra gruppi di visitatori. In figura 1.7 si può
osservare, il grafo pesato rappresentante tutte le interazioni tra i visitatori (classificati
per età) e le opere d'arte, mentre in figura 1.8 il grafo pesato raffigura tutte le
interazioni tra i visitatori (classificati per titolo di studio) e le opere d'arte.
Nel capitolo 5 si vedrà, utilizzando le metriche definite e descritte nel capitolo
2, se i modelli di mobilità (descritti nel capitolo 2) generano grafi dinamici, con
proprietà topologiche e temporali vicine a quelle possedute dal grafo dinamico
ottenuto dal dataset empirico relativo all'esperimento condotto.
Anche in questo caso il tracciamento della mobilità dei visitatori, non
raccoglie le traiettorie e le localizzazioni spaziali in maniera accurata, ma raccoglie
solamente i contatti di prossimità tra individui. Si possono solamente conoscere la
posizione del visitatore, ossia in che posizione della sala Enel si trova (o che opera
d'arte stia guardando), in base a quale lettore RFID riceve il segnale ad alta potenza
inviato dal tag indossato.

24
Fig.1.6: Il grafo mostra le interazioni fra i gruppi di visitatori. Ciascun nodo
rappresenta un gruppo costituito dalle persone entrate in sala accompagnate.

25
Fig.1.7: Il grafo mostra le interazioni tra i visitatori e le opere d'arte. I pallini scuri e
grandi rappresentano le opere d'arte, mentre i pallini colorati più piccoli
rappresentano i visitatori, che sono stati classificati in base alla loro età, compresa tra
0-9, 10-19, 20-29, 30-39, 40-49, 50-59, 60-69, 70-79, 80 e più anni.

26
Fig.1.8: Il grafo mostra le interazioni tra i visitatori e le opere d'arte. I pallini scuri e
grandi rappresentano le opere d'arte, mentre i pallini colorati più piccoli
rappresentano i visitatori, che sono stati classificati in base al titolo di studio (Master,
Bachelor, High School, Ph.D., Primary School e Mid School).

27
Capitolo 2
Mobility Models
Nel precedente capitolo sono state descritte le tecnologie con le quali
vengono collezionati i dataset empirici, ossia dati che mostrano i comportamenti reali
dei dispositivi mobili (nel nostro caso tag RFID). In questo capitolo verrà definito
cosa sono invece i dataset sintetici (o Synthetic dataset), dati generati usando i modelli di
mobilità, ed saranno illistrativi modelli che tentano di riprodurre il comportamento
dei dispositivi mobili, senza usare tracce di mobilità reali.
I Synthetic data sono secondo il McGraw-Hill Dictionary of Scientific and
Technical Terms [12] "qualunque raccolta di dati applicabile a una data situazione,
che non sia ottenibile tramite una misurazione diretta". Catturare i movimenti di
individui (o nodi mobili) permette di osservare gli schemi di comportamento presenti
in sistemi di vita reale. Il processo di tracciamento però, è un'operazione difficile da
fare quando viene coinvolto un gran numero di persone e l'osservazione viene
eseguita per lunghi periodi di tempo.
I protocolli e le applicazioni per le reti mobili non sono facilmente modellabili e le
loro performance non sono facilmente valutabili se non si conoscono i movimenti
degli individui, che verranno chiamati da ora user trace. Se si vogliono produrre delle
user trace senza ricorrere a complesse infrastrutture per collezionare i dati (ad esempio
la piattaforma SocioPatters illustrata nel capitolo 1), è necessario utilizzare i synthetic
models. I Synthetic models rappresentano realisticamente il comportamento di nodi
mobili senza aver bisogno di catturare user trace dal mondo reale.
Tracy Camp nell'articolo [13] presenta diversi modelli di mobilità, che sono stati
utilizzati per valutare le performance di protocolli per reti ad hoc. L'autore enfatizza
il bisogno di sviluppare modelli di mobilità accurati per rappresentare realisticamente
i movimenti di utenti mobili, esplorando le limitazioni delle strategie adottate dai
modelli attualmente utilizzati. Egli classifica i modelli di mobilità in due tipi: individual
mobility models e group mobility models.

28
Gli Individual mobility models o memoryless models [14],[15] descrivono nodi le cui
azioni sono indipendenti l'uno dall'altro. Questi semplici modelli sono i più usati per
valutare reti mobili wireless, in cui ogni dispositivo è indipendente dagli altri e quindi
non esistono correlazioni nei comportamenti.
I group mobility models [16],[17],[18] sono invece più complessi e meno utilizzati,
e rappresentano il comportamento di nodi dipendenti l'uno dall'altro. Nei prossimi
paragrafi saranno decritti i seguenti Individual mobility models, i più famosi ed utilizzati
nel simulare il comportamento delle reti mobili ad hoc:
1. Random Walk Mobility Model: modello in cui i nodi mobili seguono direzioni
casuali con velocità scelte in modo casuale.
2. Random Waypoint Mobility Model: modello che tiene conto di un tempo di
pausa, prima che il nodo cambi direzione e velocità.
3. Random Direction Mobility Model: modello in cui i nodi mobili devono arrivare
alla fine dell'area di simulazione prima di poter cambiare la direzione e la
velocità.
4. Truncated Lévy Walk Mobility Model: modello dove le human walks del caso reale
sono approssimate con quelle che vengono chiamate, Lévy walks.
5. Boudless Simulation Area Mobility Model: modello che trasforma l'area di
simulazione da rettangolare 2D a forma toroidale.
6. Gauss-Markov Mobility Model: modello in cui gli schemi di mobilità possono
essere resi più o meno casuali regolando un parametro.
7. Versione probabilistica del Random Walk Mobility Model: modello che utilizza un
insieme di probabilità per determinare la prossima posizione di un nodo
mobile.
8. Weighted Waypoint Mobility Model: modello in cui i nodi mobili scelgono la
propria destinazione secondo una certa probabilità, che dipende dalla
posizione corrente, dal tempo e dalla "popolarità" della zona da raggiungere.
Illustreremo anche i seguenti group mobility models:
1. Exponential Correlated Random Mobility Model: modello dove i movimenti
seguono una funzione di movimento.
2. Column Mobility Model: modello dove un insieme di nodi forma una linea che si
muove uniformemente lungo una specifica direzione.

29
3. Nomadic Community Mobility Model: modello dove un insieme di nodi si muove
da un luogo ad un altro, mantenendo una certa libertà di movimento
all'interno del gruppo.
4. Pursue Mobility Model: modello dove un insieme di nodi insegue un
determinato nodo.
5. Reference Point Group Mobility Model: modello dove i movimenti delle comunità
sono basati sul percorso che attraversa un centro logico.
2.1 Individual mobility models
Verrano descritti ora i modelli di mobilità in cui ciascun nodo ha un comportamento
indipendente rispetto a quello degli altri nodi.
2.1.1 Random Walk (RW)
Il Random Walk Mobility Model è stato ideato ed illustrato per la prima volta da
Einstein nel 1926 [50]. Il modello si basa sul moto browniano, ossia sul movimento
disordinato e casuale delle particelle (aventi diametro dell'ordine del micrometro)
presenti in fluidi o sospensioni fluide. In questo modello di mobilità, viene
inizialmente definita un'area rettangolare di dimensione 𝑋𝑚𝑎𝑥 × 𝑌𝑚𝑎𝑥 ed il numero
totale di nodi 𝑁.
Ciascun nodo si muove dalla sua posizione corrente alla sua posizione
successiva scegliendo casualmente una direzione e una velocità con cui viaggiare. Il
valore della velocità viene scelto da una distribuzione e può essere compreso tra un
valore minimo e un valore massimo 𝑠𝑝𝑒𝑒𝑑𝑚𝑖𝑛, 𝑠𝑝𝑒𝑒𝑑𝑚𝑎𝑥 . Anche la direzione
viene scelta casualmente da una distribuzione uniforme con valori compresi tra
0, 2𝜋 .
Ogni passo di simulazione termina dopo un tempo prestabilito t o dopo una
certa distanza d, alla fine delle quali ciascun nodo sceglie una nuova direzione e
velocità. Del Random Walk Mobility Model sono state derivate altre versioni, chiamate
d-D walks, dove d rappresenta il numero di dimensioni dell'area di simulazione.
Quello che abbiamo descritto è la versione 2-D. Questo modello è memoryless perché
non tiene traccia della posizione e della velocità passata dei nodi mobili. La velocità e
la direzione correnti di un nodo mobile, sono indipendenti da quelle passate. In

30
figura 2.1 (ottenuta dal sito http://paginas.fe.up.pt/~ee03058/stat_art.html) osserviamo
che questa caratteristica può generare movimenti umani irrealistici.
Fig.2.1: Esempio di come si muove un nodo mobile usando il Random Walk
Mobility Model versione 2-D.
Se il tempo 𝑡 o la distanza 𝑑, che definiscono quanto dura un passo della
simulazione, sono troppo corti, i nodi si muovono solo in una piccola parte dell'area
di simulazione, generando uno schema di movimento adatto all'analisi di reti semi
statiche. Pertanto se si vogliono invece analizzare reti dinamiche, dobbiamo scegliere
grandi valori per 𝑡 e 𝑑.
2.1.2 Random Waypoint (RWP)
Uno dei modelli di mobilità più popolari ed utilizzati è il Random Waypoint model
(RWP). Questo modello di mobilità è un semplice modello stocastico che descrive
come si muovono i nodi in una rete mobile in una data area. In questo modello di
mobilità viene definita un'area rettangolare di dimensione 𝑋𝑚𝑎𝑥 × 𝑌𝑚𝑎𝑥 e stabilito il
numero totale di nodi 𝑁. Ciascun nodo viene casualmente posizionato nell'area in un
punto (𝑥, 𝑦), dove 𝑥 e 𝑦 sono entrambi uniformemente distribuiti rispettivamente su
0, 𝑋𝑚𝑎𝑥 e 0, 𝑌𝑚𝑎𝑥 . A ciascun nodo vengono assegnati un punto di arrivo o
destinazione (𝑥0, 𝑦0), casualmente scelto tra i punti dell'area, e una velocità v, che è

31
casualmente scelta da una distribuzione uniforme in un intervallo compreso tra
𝑚𝑖𝑛𝑠𝑝𝑒𝑒𝑑, 𝑚𝑎𝑥𝑠𝑝𝑒𝑒𝑑 . Un nodo inizia a muoversi verso la destinazione con
velocità v. Arrivato al punto di arrivo (𝑥0, 𝑦0), il nodo rimane li per un tempo p,
chiamato waiting time, che è casualmente scelto da una distribuzione uniforme.
Terminato il waiting time, vengono scelte una nuova destinazione e una nuova velocità
nello stesso modo e il processo si ripete fino a che non termina la simulazione.
In figura 2.2 (ottenuta dal sito http://www.emeraldinsight.com) come il
comportamento di un nodo in un area di simulazione che misura 1000 x 1000 m.
Fig.2.2: Esempio di come si muove un nodo mobile usando il Random Waypoint
Mobility Model in un'area 1000 x 1000 m.
Se al modello si assegna a ciascun nodo un waiting time pari a zero e
𝑚𝑖𝑛𝑠𝑝𝑒𝑒𝑑, 𝑚𝑎𝑥𝑠𝑝𝑒𝑒𝑑 = 𝑠𝑝𝑒𝑒𝑑𝑚𝑖𝑛, 𝑠𝑝𝑒𝑒𝑑𝑚𝑎𝑥 , il Random Waypoint
Mobility Model diventa simile al Random Walk Mobility Model. Il modello presenta
il seguente problema [13]: ciascun nodo mobile viene posizionato in modo casuale
nell'area di simulazione, non rappresentando in modo realistico il modo in cui i nodi
si distribuiscono quando si muovono. In [13] viene mostrato che nel modello si
attenua il problema della posizione iniziale dopo circa 600 secondi di simulazione e
che esistono tre possibili soluzioni per evitare l'inaccuratezza del modello, dovuta alla
posizione iniziale dei nodi.
La prima soluzione è salvare le posizioni dei nodi al termine di una
simulazione durata più di 600 secondi ed utilizzarle come posizioni iniziali nelle

32
simulazioni successive. La seconda è scegliere la posizione iniziale secondo una
distribuzione di probabilità che rappresenta meglio la realtà che vogliamo simulare.
La terza consiste nello scartare i primi 1000 secondi di simulazione. La terza
soluzione è migliore della prima, perché garantisce che ciascuna simulazione abbia un
inizializzazione esente dal problema appena trattato.
Nel Random Waypoint Mobility Model esiste una correlazione tra la velocità
e il tempo di pausa di un nodo. Ad esempio, se nella simulazione i nodi percorrono
l'area a velocità elevate ed hanno dei tempi di pausa lunghi, vengono prodotte reti più
stabili rispetto al caso in cui, i nodi si muovono lentamente e aspettano poco tempo.
La distribuzione spaziale dei nodi incide sul numero di vicini che essi
possono avere, perché i nodi che sono vicini al bordo dell'area di simulazione, hanno
maggiore probabilità di scegliere una destinazione che si trovi verso il centro
dell'area, dove la probabilità di incontrare nodi cresce, mentre quando si trovano sul
bordo dell'area la probabilità di incontrare nodi decresce. Queste variazioni di densità
(chiamate density wave) del numero medio di vicini in base alla zona, vengono risolte
nel modello descritto nel prossimo paragrafo.
2.1.3 Random Direction (RD)
Il Random Direction Mobility Model (RD)descritto in [52], è stato ideato per evitare le
variazioni del numero medio di vicini che si hanno in base alla zona dell'area di
simulazione raggiunta da un nodo mobile, che avvengono nel modello RWP. I
quest'ultimo modello è stato visto che la probabilità con cui un nodo sceglie una
nuova destinazione localizzata nel centro dell'area di simulazione, o che richiede
l'attraversamento di essa, è alta. Pertanto il modello RD cerca di evitare il più
possibile di diminuire questa probabilità, facendo in modo che i nodi si trovino con
maggiore probabilità vicino i bordi dell'area di simulazione.
Come visto modello precedentemente illustrato, anche ora viene definita
un'area rettangolare di dimensione 𝑋𝑚𝑎𝑥 × 𝑌𝑚𝑎𝑥 ed il numero totale di nodi 𝑁.
Ciascun nodo viene casualmente posizionato nell'area in un punto (𝑥, 𝑦), dove 𝑥 e 𝑦
sono entrambi uniformemente distribuiti rispettivamente su 0, 𝑋𝑚𝑎𝑥 e 0, 𝑌𝑚𝑎𝑥 .
A ciascun nodo viene assegnata una velocità v, casualmente scelta da una
distribuzione uniforme in un intervallo compreso tra 𝑚𝑖𝑛𝑣, 𝑚𝑎𝑥𝑣 e un angolo di
direzione, scelto casualmente da una distribuzione uniforme con valori compresi tra

33
0, 2𝜋 , come avviene nel modello RW. Ciascun nodo dopo aver scelto la direzione,
la segue fino ad arrivare al bordo dell'area di simulazione con velocità 𝑣.
Quando un nodo raggiunge il bordo si ferma per un tempo chiamato waiting
time, casualmente scelto da una distribuzione uniforme. Terminato il waiting time,
vengono scelte una nuova destinazione e una nuova velocità nello stesso modo e il
processo si ripete fino a che non termina la simulazione.
Dato che i nodi restano per molto tempo sui bordi dell'area di simulazione, la
distanza media tra i nodi risulta maggiore rispetto agli altri modelli, per questo
motivo un pacchetto dati o un informazione, raggiunge un nodo attraversando un
numero medio di hop maggiore rispetto agli altri modelli. Dunque la rete ottenuta
dalla simulazione risulta partizionata.
Per diminuire tale problema, è stata ideata una versione modificata del
modello RD, descritta in [51], in cui i nodi mobili continuano a scegliere casualmente
una direzione, ma non devono raggiungere necessariamente il bordo dell'area di
simulazione affinchè si fermino ed aspettino il waiting time, per poi ripartire per una
nuova direzione. Questa modifica rende il modello RD identico al modello RW con il
waiting time.
2.1.4 Truncated Lèvi Walk (TLW)
Gli schemi di mobilità degli esseri umani vengono tipicamente approssimati
con il modello RW (descritto nel paragrafo 2.1.1) o RWP (illustrato nel paragrafo
2.1.2). Attraverso delle misurazioni fatte in natura si è osservato che le traiettorie
seguite dagli animali sono approssimabili a un Lévy flight [19], definito da Schlesinger
[60], come il più lungo viaggio che una particella segue in linea retta, da un luogo ad
un altro, senza cambiare direzione o tempo di pausa.
Queste osservazioni sono state poi generalizzate al caso umano nello studio
descritto in [20], dove, catturando tramite tecnologia GPS le user trace di 44
volontari distribuiti in diversi ambienti outdoor (campus universitari, metropolitane,
parchi), si è riscontrato che le human walks hanno delle forti correlazioni statistiche
con le Lévy walks. Gli autori enfatizzato il fatto che le somiglianze possono essere
solo di tipo statistico, perché gli umani si muovono in base all'attività che devono
svolgere o alle loro preferenze, dunque non possono spostarsi in modo casuale.

34
In figura 2.5 si nota che, le Lévy walks [20] sono un insieme di tanti flight corti
e rari flight lunghi e che le tracce di mobilità risultano essere più realistiche di quelle
ottenute dai modelli di mobilità RW e RWP.
Nello studio è stato scoperto che, le flight distribution e le waiting time distribution
dei partecipanti all'esperimento, sono truncated power-law distribution, e che la Inter contac
time (ITC) distribution delle human walk mostra un comportamento di tipo power-law
[22].
Fig.2.5: Esempio di user trace ottenuta da (a) Levy walks, (b) RWP e (c) RW.
Usando tali risultati, Hong in [21] ha sviluppato il Truncated Levy Walk model (TLW),
ossia una variante del modello RWP (illustrato nel paragrafo 2.1.2), con le seguenti
caratteristiche:
Le lunghezze dei flight seguono una truncated power law con esponente 𝛼:
𝑝 𝑙 ~ 𝑙 − 1+𝛼 , 𝑙 < 𝑙𝑚𝑎𝑥 ;
i waiting times seguono una truncated power law con esponente 𝛽:
𝜓 𝑡 ~𝑡− 1+𝛽 , 0 < 𝑡 < 𝑡𝑚𝑎𝑥 ;
l'angolo di direzione segue una distribuzione uniforme compresa tra 0,2𝜋 ;
la velocità cresce in modo proporzionale rispetto lunghezza del flight;
2.1.5 Boundless Simulation Area (BD)
Il Boundless Simulation Area Mobility Model, non è memoryless, ossia esiste una
relazione tra la direzione e la velocità di un nodo nel tempo passato e la direzione e
velocità del nodo correnti [55]. Definita un area'rettangolare di dimensione 𝑋𝑚𝑎𝑥 ×
𝑌𝑚𝑎𝑥 ed il numero totale di nodi 𝑁, la velocità di un nodo mobile è descritta da un
vettore 𝑣 = 𝑣, 𝜃 , dove v è la velocità e 𝜃 è la direzione. Ciascun nodo viene

35
casualmente posizionato nell'area in un punto (𝑥, 𝑦). Ad ogni passo della
simulazione, di durata ∆𝑡, la velocità e la posizione di ogni nodo viene aggiornata
secondo le seguenti equazioni:
𝑣 𝑡 + ∆𝑡 = 𝑚𝑖𝑛 𝑚𝑎𝑥 𝑣 𝑡 + ∆𝑣, 0 , 𝑉𝑚𝑎𝑥
𝜃 𝑡 + ∆𝑡 = 𝜃 𝑡 + ∆𝜃
𝑥 𝑡 + ∆𝑡 = 𝑥 𝑡 + 𝑣 𝑡 ∗ 𝑐𝑜𝑠𝜃 𝑡
𝑦 𝑡 + ∆𝑡 = 𝑦 𝑡 + 𝑣 𝑡 ∗ 𝑠𝑖𝑛𝜃 𝑡
dove 𝑉𝑚𝑎𝑥 è la massima velocità definita nella simulazione, ∆𝑣 è la variazione di
velocità che è uniformemente distribuita tra −𝐴𝑚𝑎𝑥 ∗ ∆𝑡, 𝐴𝑚𝑎𝑥 ∗ ∆𝑡 , 𝐴𝑚𝑎𝑥 è la
massima accelerazione che può raggiungere un nodo, ∆𝜃 è la variazione di direzione
che è uniformemente distribuita tra −𝛼 ∗ ∆𝑡, 𝛼 ∗ ∆𝑡 , e 𝛼 è la massima variazione di
angolo nella direzione percorsa dal nodo. Dalla figura 2.3 (ottenuta dal sito web
http://www-public.it-sudparis.eu/~gauthier/MobilityModel/mobilitymodel.html) si osserva che
a differenza dei modelli illustrati nei paragrafi precedenti, i nodi possono continuare il
loro percorso superando i confini dell'area di simulazione, riapparendo nel lato
opposto dell'area di simulazione.

36
Fig.2.3: Esempio di come si muove un nodo mobile, che parte dal punto
(≅390,≅290), usando il Boundless Simulation Area Mobility Model in un area di
1000 x 300 m.
In figura 2.4 si vede che questa tecnica crea un area di simulazione toroidale, dove i
nodi possono viaggiare senza confini.
Fig.2.4: La figura mostra che nel Boundless Simulation Area Mobility Model l'area di
simulazione di forma rettangolare, viene trasformata in una forma toroidale.
2.1.6 Gauss-Markov (GM)
Il Gauss-Markov Mobility Model è stato implementato in [56]. A ciascun nodo,
che si muove in un'area rettangolare di dimensione 𝑋𝑚𝑎𝑥 × 𝑌𝑚𝑎𝑥 , viene assegnata
una velocità e una direzione iniziale, che viene aggiornata ad ogni intervallo di tempo
fisso 𝑛. Il valore aggiornato nell'n-esima istanza è calcolato in base al valore della n-1
esima istanza, e al valore di una variabile casuale, usando le seguenti equazioni:
𝑠𝑛 = 𝛼𝑠𝑛−1 + 1 − 𝛼 𝑠 + 1 − 𝛼2 𝑠𝑥𝑛−1
𝑑𝑛 = 𝛼𝑑𝑛−1 + 1 − 𝛼 𝑑 + 1 − 𝛼2 𝑑𝑥𝑛−1
dove 𝑠𝑛e 𝑑𝑛sono, rispettivamente la nuova velocità e la nuova direzione dei nodi
nell'intervallo temporale 𝑛; 𝛼, compresa tra −1, 1 , è usata come parametro per
regolare la casualità; 𝑠 e 𝑑 sono costanti che rappresentano il valore medio di velocità

37
e direzione con 𝑛 → ∞; 𝑠𝑥𝑛−1 e 𝑑𝑥𝑛−1
sono variabili aleatorie prese da una
distribuzione Gaussiana.
Impostando 𝛼 = 0 otteniamo valori totalmente casuali, mentre con 𝛼 = 1
otteniamo un moto lineare. Assegnando valori intermedi ad 𝛼, si ottengono diversi
livelli di casualità. Ad ogni passo della simulazione la posizione successiva di un nodo
viene calcolata in base alla posizione, velocità e direzione corrente, seguendo le
seguenti equazioni:
𝑥𝑛 = 𝑥𝑛−1 + 𝑠𝑛−1 ∗ 𝑐𝑜𝑠𝑑𝑛−1
𝑦𝑛 = 𝑦𝑛−1 + 𝑠𝑛−1 ∗ 𝑠𝑖𝑛𝑑𝑛−1
Dove 𝑥𝑛 , 𝑦𝑛 𝑒 𝑥𝑛−1, 𝑦𝑛−1 sono rispettivamente le coordinate x e y dei nodi
mobili all'n-esimo e all'n-1 esimo intervallo temporale.
In figura 2.5 (dal sito ottenuta dal sito web http://tinyurl.com/8oed5jz) viene
mostrato il comportamento di un nodo in un area di simulazione che misura 700 x
1000 m.
Fig.2.5: Esempio di come si muove un nodo mobile, che parte dal punto
(≅500,≅500), usando il Gauss-Markov Mobility Model in un area di 700 x 1000 m.

38
2.1.7 Probabilistic Random Walk (PRW)
Nella tesi di dottorato di Chiang [57] è stato creato un modello di mobilità, chiamato
Probabilistic Random Walk Mobility Model, che, utilizzando una matrice di probabilità,
determina la posizione di uno specifico nodo mobile, in un'area 𝑋𝑚𝑎𝑥 × 𝑌𝑚𝑎𝑥 , in
base a tre possibili stati: lo stato 0 rappresenta la posizione corrente, lo stato 1
rappresenta la posizione passata e lo stato 2 rappresenta la posizione futura se il nodo
mobile continua a muoversi nella stessa direzione.
La matrice di probabilità usata e la seguente:
𝑃 =
𝑃(0,0) 𝑃(0,1) 𝑃(0,2)𝑃(1,0) 𝑃(1,1) 𝑃(1,2)𝑃(2,0) 𝑃(2,1) 𝑃(2,2)
Dove ciascun valore 𝑃(𝑎, 𝑏) rappresenta la probabilità che un nodo mobile passi
dallo stato 𝑎 allo stato 𝑏. Le coordinate x e y di ciascun nodo vengono aggiornate in
base ai valori della matrice. Ogni nodo si muove casualmente con una velocità media
predefinita. Nella seguente matrice ci sono i valori che Chiang ha usato per calcolare
le variazioni nelle coordinate x e y dei nodi:
𝑃 = 0 0.5 0.5
0.3 0.7 00.3 0 0.7
In figura 2.6 possiamo vedere la matrice illustrata sotto forma di diagramma di flusso.
Per come è configurata la matrice di probabilità, un nodo mobile può andare diretto
verso: nord, sud, est o ovest, senza mai prendersi una pausa (wait time = 0). La
probabilità che il nodo continui a seguire la stessa direzione è più alta della
probabilità che esso la cambi. Inoltre i valori definiti non permettono movimenti tra
la precedente e la prossima posizione senza passare per quella corrente.

39
Fig.2.6: Diagramma di flusso della versione probabilistica del Random Walk Mobility
Model.
Questa implementazione del modello produce dei comportamenti di mobilità più
realistici del modello RW. Ad esempio una persona che deve eseguire vari compiti
giornalieri, tende a muoversi seguendo una direzione semi costante.
Raramente gira improvvisamente intorno a dove era, tornando sui suoi passi,
e quasi mai si muove casualmente sperando eventualmente di finire in uno dei posti
che gli interessano. In figura 2.7 (ottenuta dal sito ottenuta dal sito web http://www-
public.it-sudparis.eu/~gauthier/MobilityModel/mobilitymodel.html) viene illustrato un
esempio di schema di mobilità di un nodo mobile usando la versione probabilistica
del modello RW. Da questa figura si osserva che la user trace ha dei cambiamenti di
direzione molto meno variabili di quelli visti per il modello RW in figura 2.1, dunque
approssima meglio gli schemi di mobilità degli esseri umani.

40
Fig.2.7: Esempio di come si muove un nodo mobile, che parte dal punto
(≅500,≅500), usando il Probabilistic Random Walk Mobility Model in un area di 500
x 560 m.
2.1.8 Weighted Waypoint (WW)
Il Weighted Waypoint Mobility Model (WW) [64] è una versione del modello RWP, in cui
le persone non decidono una destinazione in modo casuale, ma la scelgono in base
ad una certa probabilità, che dipende da quanto gli individui tendono a visitarla. Tutti
i modelli che sono stati illustrati nei paragrafi precedenti non considerano che
all'interno dell'area di simulazione alcune zone sono visitate più spesso rispetto ad
altre.
In [64] è stato dimostrato che se ne viene tenuto conto, ossia si considera
l'esistenza di zone in cui gli individui interagiscono tra di loro per un periodo
prolungato, si possono ottenere delle user trace più accurate rispetto al modello RWP.
I modelli WW ed RWP si differenziano per :
1. Le persone non scelgono casualmente la destinazione: a ciascuna zona
dell'area di simulazione viene assegnato un peso, definito in base alla
probabilità di scegliere quel luogo come destinazione. Tale probabilità può

41
essere calcolata valutando quanto le zone siano "popolari" nell'ambiente che
stiamo tentando di simulare.
2. La probabilità di scegliere una specifica zona come prossima destinazione,
dipende dalla posizione corrente e dal tempo: viene usato un modello
Markoviano per assegnare tali probabilità.
3. Il waiting time in ciascuna zona, è diverso e dipende dalle proprietà specifiche
del luogo.
2.2 Group mobility models
Verranno descritti ora i modelli di mobilità in cui i nodi hanno un comportamento
che dipende da quello degli altri nodi. Tali modelli risultano essere utili per tracciare
user trace che simulano realtà in cui i nodi si muovono in comunità.
2.2.1 Exponential Correlated Random
Questo modello di mobilità proposto in [58] data la posizione di un nodo (o un
gruppo) al tempo 𝑡, tramite funzione di movimento 𝑏 𝑡 , viene determinata la
posizione successiva del nodo (o gruppo) al tempo 𝑡 + 1, con la seguente funzione:
𝑏 𝑡 + 1 = 𝑏(𝑡)𝑒−
1𝜏 + 𝜎 1 − (𝑒−
1𝜏)2𝑟
dove r è una variabile casuale che segue una distribuzione Gaussiana che ha varianza
𝜎, e 𝜏 regola la velocità di cambiamento del nodo dalla posizione precedente a quella
successiva (ad una valore minore di 𝜏 corrisponde un cambiamento più rapido). Il
problema principale di questo particolare modello è la difficoltà di assegnare il valore
più corretto ai parametri in modo da ottenere lo schema di mobilità che vogliamo.
2.2.2 Column
Il Column Mobility Model (http://www.disca.upv.es/misan/mobmodel.htm) è un modello che
rappresenta un insieme di nodi mobili che si muovono lungo una data linea (o
colonna). Inizialmente viene definita una reference grid, ossia una colonna iniziale di
nodi, dove ciascun nodo viene messo in relazione con un punto di riferimento. I
nodi si possono muovere attorno al loro punto di riferimento seguendo le regole
dettate da un particolare Individual mobility models (ad esempio viene consigliato di

42
usare il modello RW, descritto nel paragrafo 2.1.1). Il nuovo reference point per un
determinato nodo viene definito come:
𝑛𝑒𝑤𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑐 𝑒𝑝𝑜𝑖𝑛𝑡= 𝑜𝑙𝑑𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑐 𝑒𝑝𝑜𝑖𝑛𝑡
+ 𝑎𝑑𝑣𝑎𝑛𝑐𝑒𝑣𝑒𝑐𝑡𝑜𝑟
dove 𝑜𝑙𝑑𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑐 𝑒𝑝𝑜𝑖𝑛𝑡 è il punto di riferimento precedente e 𝑎𝑑𝑣𝑎𝑛𝑐𝑒𝑣𝑒𝑐𝑡𝑜𝑟 un
offset angolare scelto in modo casuale che sposta la griglia di riferimento. Quando la
griglia viene ruotata con un angolo casuale (compreso tra 0 e 𝜋) e spostata ad una
distanza casuale, i nodi mobili, che si muovono seguendo il loro punto di riferimento,
seguono la griglia e continuano la loro rotazione attorno al punto.
2.2.3 Nomadic Community
Il Nomadic Community Mobility Model (http://www.disca.upv.es/misan/mobmodel.htm) è un
modello che rappresenta comunità di nodi che si muovono collettivamente da un
punto ad un altro [59]. Ogni comunità o gruppo di nodi, che ha associato un punto
di riferimento in comune, si muove attorno al proprio reference point ma, all'interno di
ogni gruppo, ciascun nodo mantiene una propria "area personale", dove si muove in
modo casuale. Questo modello può essere usato ad esempio per simulare scenari
dove una classe di studenti visitano un museo d'arte. Gli alunni della classe si
sposteranno da un punto ad un altro insieme, mentre nel punto in cui si trovano si
possono muovere individualmente come vogliono (ad esempio secondo un Individual
mobility models). Rispetto al modello Column, i nodi all'interno del gruppo sono meno
vincolati nella possibilità di movimento.
2.2.4 Pursue
Nel Pursue Mobility Model definito in (http://www.disca.upv.es/misan/mobmodel.htm) e in
[59], uno dei nodi della rete viene selezionato come nodo target. Il nodo prescelto,
che si muove secondo uno degli Individual mobility models, viene seguito dagli altri nodi
mobili, eseguendo dei movimenti in direzione di esso, determinati da un
randomvector , ossia un offset ottenuto seguendo uno degli Individual mobility models
(ad esempio il modello RW, descritto nel paragrafo 2.1.1). La nuova posizione di
ciascun nodo viene calcolata utilizzando la seguente equazione:
newposition = oldposition + acceleration target − oldposition + randomvector

43
dove acceleration target − oldposition è l'informazione relativa al nodo che viene
inseguito e randomvector rappresenta l'offset applicato ad ogni nodo.
Dunque, per calcolare la prossima posizione di ogni nodo, questo modello utilizza la
posizione corrente del nodo, un vettore casuale e il valore dell'accelerazione relativa
al nodo inseguito.
2.2.5 Reference Point Group (RPG)
Il Reference Point Group Mobility Model (RPG) definito in [58] rappresenta il
movimento casuale di un gruppo di nodi mobili. Gli spostamenti del gruppo si
basano sul percorso seguito da quello che è definito il centro logico del gruppo. Il
centro logico del gruppo viene utilizzato per calcolare i movimenti del gruppo
attraverso un group motion vector, 𝐺 𝑀, che può essere predefinito o scelto in modo
casuale.
Ogni nodo si muove casualmente seguendo il proprio reference point pre-
definito, il cui spostamenti dipendono dal movimento del gruppo. Quando di un
nodo viene calcolato un nuovo reference point al tempo 𝑡 + 1, 𝑅𝑃(𝑡 + 1), questo
viene combinato con un random vector, 𝑅 𝑀, per rappresentare lo spostamento
casuale di ogni nodo rispetto al relativo reference point.
Dunque, il vettore 𝑅 𝑀 viene usato per calcolare il nuovo reference point di
ogni nodo al tempo t+1. Successivamente la nuova posizione di ogni nodo viene
stabilita sommando il random motion vector, 𝑅 𝑀, al nuovo reference point.

44
Capitolo 3
Grafi dinamici
Nel presente lavoro sono state generate reti dinamiche di contatti (che
saranno chiamate da ora in poi Dynamic Contact Network o Contact Graph), ricavate sia
da tracce di contatti basate su quello che è avvenuto negli esperimenti SocialDIS e
MACRO, sia da tracce di contatti ottenute a partire dai modelli di mobilità. Nei
seguenti paragrafi verrà descritto: come si definisce un Contact Graph a partire dai casi
reali e dai casi simulati usando modelli di mobilità; gli indicatori statistici definiti ed
implementati per poter analizzare e confrontare le Dynamic Contact Network; le
limitazioni del formato attualmente più utilizzato per la scrittura di grafi dinamici su
file e il nuovo formato che è stato ideato per superarle.
3.1 Definizione del grafo dinamico dei contatti
L'evoluzione dinamica di una rete, può essere modellata introducendo la dimensione
temporale 𝑡, che mostra come la topologia della rete varia nel tempo. Nelle
opportunistic networks, un Contact Graph 𝐺(𝑉, 𝐸) è tipicamente usato per descrivere
una rete dinamica di contatti [8]. In un Contact Graph: 𝑉 è l'insieme di nodi ed 𝐸 è
l'insieme degli archi, dove ciascun arco è rappresentato da, una coppia di nodi, dal
tempo in cui il contatto è iniziato e dalla durata del contatto.
Basandosi su questa definizione fornita da Ferreira [8], viene ridefinito il
Contact Graph come una rete 𝐺(𝑉, 𝐸), in cui ciascun nodo 𝑣 ∈ 𝑉, rappresenta una
persona e ciascun arco 𝑒 ∈ 𝐸, rappresenta un contatto face-to-face avvenuto tra due
individui. Sia 𝑇 = 𝑡0, 𝑡1,… , 𝑡𝑛 l'insieme di tutti gli istanti temporali in cui il grafo
varia nel tempo.
Ad ogni nodo e ogni arco viene associato un Presence Schedule, un insieme
contenente gli istanti di tempo 𝑡 ∈ 𝑇, in cui il nodo (o arco) è presente. Il Presence

45
Schedule di un nodo 𝑣 può essere rappresentato come 𝑃(𝑣), e il Presence Schedule di un
arco 𝑒 può essere rappresentato come 𝑃(𝑒).
A partire da un caso reale (ad esempio gli esperimenti SocialDIS e MACRO),
si può facilmente costruire il Contact Graph dalla traccia di contatti collezionata (come
viene descritto nei paragrafi 1.2.3 e 1.2.4), generando un nodo ogni volta che un tag
RFID viene rilevato per la prima volta da un reader RFID, assegnandogli ciascuna
volta il tempo in cui è stato rilevato (in formato UNIX time) e generando un arco
ogni volta che due individui si trovano uno di fronte all'altro ad una distanza
ravvicinata.
Quando questo accade, viene aggiornato il 𝑃(𝑣) di ciascun 𝑣 ∈ 𝑉 che ha
partecipato nell'interazione e il 𝑃 𝑒 dell'arco 𝑒 ∈ 𝐸 che li connette. Infatti, il tag
RFID indossato dagli individui, quando rileva la comunicazione, invia un messaggio
ad alta potenza verso il reader RFID più vicino. Tale mesaggio contiene il tempo in
cui il contatto è avvenuto (in formato UNIX time) e l'id dei tag che hanno
comunicato. Il peso di ciascun arco del Dynamic Contact Graph ottenuto, è pari alla
frequenza con cui il contatto avviene, ossia il rapporto tra 𝑃 𝑒 e 𝑇 .
A partire dai modelli di mobilità, se si vogliono rilevare i contatti di
prossimità tra persone, ciascuna delle quali ha una propria posizione, direzione,
velocità e tempo di pausa, bisogna considerare che ogni individuo possa vederne un
altro, entro un raggio limitato di visibilità.
Un intersection graph [61] è un grafo formato a partire da una famiglia di insiemi
𝑆𝑖 , con 𝑖 = 0,1,2, … , 𝑛, creando un vertice 𝑣𝑖 per ogni insieme 𝑆𝑖 e connettendo due
vertici 𝑣𝑖 e 𝑣𝑗 con un arco quando i relativi insiemi hanno un'intersezione non nulla,
ovvero 𝑒 = 𝑣𝑖 , 𝑣𝑗 |𝑆𝑖 ∩ 𝑆𝑗 ≠ 0.
Come è possibile vedere in figura 3.1, uno unit disk graph [62] è un intersection
graph costituito da un vertice per ogni cerchio e da un arco ogni volta che due cerchi
s'intersecano. Ciascun cerchio, definito nel piano Euclideo, ha la stessa misura.
Utilizzando il principio su cui si basa la costruzione dello unit disk graph, viene
costruito il Contac Graph come segue: Siano A e B due individui che si muovono
secondo un modello di mobilità, sia (𝑥𝑎 ,𝑦𝑎) la posizione di A e (𝑥𝑏 ,𝑦𝑏) la posizione
di B. Siano 𝑟𝑎e 𝑟𝑏 i rispettivi raggi dei cerchi di A e B.
Definite le seguenti grandezze:

46
𝑥𝑑𝑖𝑓𝑓 = 𝑥𝑎 , − 𝑥𝑏 ,
𝑦𝑑𝑖𝑓𝑓 = 𝑦𝑎 , − 𝑦𝑏 ,
𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑒𝑠𝑞𝑢𝑎𝑟𝑒𝑑 = 𝑥𝑑𝑖𝑓𝑓2 + 𝑦𝑑𝑖𝑓𝑓
2
le persone A e B, che si muovono secondo le regole del modello di mobilità, hanno
un contatto se 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑒𝑠𝑞𝑢𝑎𝑟𝑒𝑑 < 𝑟𝑎 + 𝑟𝑏 2.
Fig.3.1: Esempio di unit disk graph, dove tra due nodi esiste un arco che li
congiunge, se e solo se i rispettivi cerchi s'intersecano.
Se in ogni istante di simulazione applichiamo questa verifica ad ogni coppia di nodi,
ogni volta che viene rilevato un contatto, assegniamo al Presence Schedule, di ciascun
nodo e dell'arco che li congiunge, il tempo in cui la comunicazione è avvenuta,
ottenendo in questo modo un Contact Graph 𝐺(𝑉, 𝐸). Il peso di ciascun arco 𝑒 ∈ 𝐸, è
pari alla frequenza con cui il contatto avviene, ovvero il rapporto tra 𝑃 𝑒 e 𝑇

47
3.2 Definizione del grafo aggregato dei contatti
I grafi dei contatti possono essere prodotti sia in forma aggregata, che in forma
dinamica. Sia 𝐺(𝑉, 𝐸), un Contact Graph e sia 𝑇 = 𝑡0, 𝑡1, … , 𝑡𝑛 , l'insieme di tutti gli
istanti temporali in cui 𝐺 varia nel tempo. Si ottiene un Contact Graph aggregato
rispetto un intervallo di tempo 𝑘1, 𝑘2 , con 0 < 𝑘2 − 𝑘1 = K ≤ 𝑇, assegnado a
ciascun arco 𝑒 ∈ 𝐸 un peso pari alla frequenza con cui il contatto avviene, ovvero il
rapporto tra 𝑃 𝑒 e 𝐾, senza però associare alcun presence schedule ai nodi/archi del
grafo.
3.3 Indicatori statistici/metriche
Nei prossimi sotto-paragrafi verranno definiti gli indicatori statistici (o metriche) che
sono stati implementati per poter analizzare e confrontare le Dynamic Contact Network
ottenute sia, a partire da casi reali che da casi simulati usando i modelli di mobilità.
Tali indicatori (o metriche) si classificano in due tipi: metriche su grafo aggregato,
ossia indicatori che eseguono misure non considerando i Presence schedules, e metriche
su grafo dinamico , ovvero indicatori che effettuano misure considerando i Presence
schedules.
3.3.1 Indicatori/metriche su grafo aggregato
Node strength. La Strength [1] di un nodo i, definita come:
𝑆𝑖 = 𝑤𝑖 ,𝑗
𝑁
𝑗𝜖𝑉
dove V è l'insieme dei vicini del nodo, 𝑉 = 𝑁, 𝑤𝑖 ,𝑗 è il peso dell'arco che connette
il nodo i al nodo j, misura la "forza" di un nodo in base alla somma dei pesi delle sue
connessioni. In un grafo pesato, la strength di un nodo è la somma dei pesi degli archi
incidenti al nodo; in-strength e out-strength sono definite per i grafi pesati diretti,
similarmente al in- e out-degree. In questo caso la strength è la frequenza attesa, con la
quale un nodo comunica con i suoi vicini.
Weighted Clustering Coefficient. Il clustering misura quanto i vicini di un nodo
tendono ad essere collegati tra di loro, ovvero quanto tendono con esso a formare
una clique (grafo completo).

48
Il local clustering di un nodo i è misurato con un coefficiente 𝐶𝑖 , introdotto da
Watts e Strogatz per le analisi delle small-world networks [2], definito come rapporto tra il
numero attuale di archi tra il nodo i e i propri vicini e il numero massimo di archi che
connettono tra do loro i suoi vicini.
Pertanto è definita come:
𝐶𝑖 =2 𝑒𝑖
𝑑𝑣(𝑑𝑣 − 1)
Dove dv è il degree del nodo i. Questa misura và calcolata solo per i nodi con 𝑑𝑣 >
1, perché per quelli con 𝑑𝑣 = 1 è pari a 0.
Il clustering coefficient del grafo è definito come la media di tutti i local cluster coefficient:
𝐶 =1
𝑁 𝐶𝑖𝑖
In figura 3.2 si osserva che, nel caso di weighted graph, il semplice cluster coefficient può
sovrastimare la misura del clustering [2],[1], pertanto il local cluster coefficient viene
ridefinito come:
𝐶𝑖𝑊 =
2
𝑆𝑖(𝑑𝑣 − 1)
𝑤𝑖 ,𝑗 + 𝑤𝑖,𝑘
2𝑗 ,𝑘
Dove 𝑆𝑖 è la Strength del nodo i, 𝑤𝑖 ,𝑗 e 𝑤𝑖 ,𝑘 sono rispettivamente i pesi degli archi che
connetto il nodo i ai suoi vicini j e k che sono tra di loro interconnessi.
Fig.3.2: Esempio che mette a confronto il valore del cluster coefficient, calcolato per il
nodo 𝑣, con la rispettiva versione pesata. In questo caso particolare, il nodo 𝑣 ha
comunicato con una frequenza maggiore, con il nodo 𝑗, dunque anche se 𝑣 fa parte

49
di una 4-clique, ne fa meno parte rispetto al caso non pesato. 𝐶𝑣 = 0.5 risulta essere
in questo caso una sovrastima rispetto a 𝐶𝑣𝑊 = 0.25.
Modularity. Suddividere una rete in partizioni (o cluster) contenenti un elevato
numero di archi al loro interno e pochi archi che le connettono l'una all'altra, viene
detto Community Detection. La modularity misura la qualità del partizionamento, ovvero
quanto bene la struttura di un grafo è stata suddivisa in moduli (chiamati anche
gruppi, cluster o community).
Grafi con alta modularity hanno connessioni dense tra i nodi appartenenti allo
stesso modulo e sparse tra i nodi appartenenti a moduli differenti. La modularity è
rappresentata dalla differenza tra il numero di archi contenuti nei cluster di uno
specifico partizionamento del grafo e il numero atteso di archi contenuti nei cluster
di un grafo random, avente la stessa node degree distribution del grafo per cui viene
calcolata tale metrica [23],[24].
In questo modo è possibile stabilire se effettivamente il numero di archi
interni ad una community sia maggiore di quanto ci si aspetterebbe da un grafo
casuale. Consideriamo un partizionamento 𝑉 = (𝑉1, 𝑉2, … , 𝑉𝑘) di un grafo 𝐺(𝑉, 𝐸).
La modularity 𝑄 è un punteggio assegnato al clustering definito come:
𝑄 =1
2𝑚 𝐴𝑢 ,𝑣 −
𝑑𝑢𝑑𝑣
2𝑚
𝑢 ,𝑣∈𝑉𝑖
𝑘
𝑖=1
Dove 𝑚 = #𝑎𝑟𝑐𝑖, 𝐴𝑢 ,𝑣 = 1 𝑠𝑒 𝑢, 𝑣 ∈ 𝐸 e 0 altrimenti, 𝑑𝑢𝑑𝑣 sono il degree dei
rispettivi nodi 𝑢 e 𝑣, 𝑑𝑢𝑑𝑣
2𝑚 è il numero atteso di archi tra in nodi 𝑢 𝑒 𝑣 nel grafo
random. Questa misura è un valore scalare compreso tra -1 e 1 e nel caso di reti
pesate è definita come [25]:
𝑄 =1
2𝑚 𝐴𝑖𝑗 −
𝑘𝑖𝑘𝑗
2𝑚 𝛿 𝐶𝑖 , 𝐶𝑗
𝑖,𝑗
Dove 𝐴𝑖𝑗 rappresenta il peso dell'arco tra i nodi 𝑖 e 𝑗, 𝑘𝑖 = 𝐴𝑖𝑗𝑗 è la somma dei
pesi degli archi incidenti al vertice 𝑖, 𝐶𝑖 è la community a cui il vertice 𝑖 viene
assegnato, la funzione 𝛿 𝐶𝑖 , 𝐶𝑗 è uguale a 1 se 𝐶𝑖 = 𝐶𝑗 (𝑢 𝑒 𝑣 appartengono alla
stessa community) e zero altrimenti ed 𝑚 =1
2 𝐴𝑖𝑗𝑖,𝑗 .

50
Calcolare la modularity per grafi di grandi dimensioni, non è un processo
banale in termini di tempo di calcolo. In [63] è stato definito il Louvain Method, un
algoritmo approssimato che permette di calcolare la metrica su grafi di grandi
dimensioni in tempi relativamente rapidi. Ad esempio, impiega solo due minuti per
analizzare una rete di due milioni di nodi. In figura 3.3 viene schematizzato il metodo
Louvain, costituito da due fasi, ripetute iterativamente.
Fig.3.3: vengono mostrate in modo schematico le due fasi del Louvain Method. Si
ripetono così i due passi fino a che non si rilevano più cambiamenti a fronte di nuove
iterazioni e la massimizzazione della modularity è raggiunta.
Nella prima fase ciascun nodo viene associato ad una propria comunità. Per
ognuno di essi si verifica se il valore di modularità migliora inserendolo nel gruppo di
ciascuno dei suoi vicini. In caso positivo il nodo viene inserito nel cluster del vicino,
altrimenti ognuno rimane nel proprio cluster di partenza. Questa operazione viene
ripetuta fino a che non è più possibile migliorare il valore della modularity. La
seconda fase, aggrega i nodi appartenenti alla stessa community e costruisce una
nuova rete, dove i nodi sono le community. Questi due passi vengono ripetuti
iterativamente fino a che il valore della modulatiry converge a un valore stazionario,
che risulta essere il massimo valore raggiungibile.
Density. La densità di un grafo 𝐺(𝑉, 𝐸), che assume valori compresi tra 0 e 1,
misura il rapporto tra il numero di archi che esistono nell'insieme 𝐸 e il massimo

51
numero possibile di archi che possono esistere tra tutti i nodi 𝑣 ∈ 𝑉. Pertanto la
densità viene calcolata nel caso di grafo non diretto (che non può avere cicli) come
segue:
2 𝐸
𝑉 ( 𝑉 − 1)
Mentre nel caso di grafo diretto, viene calcolata come segue:
𝐸
𝑉 ( 𝑉 − 1)
Se il numero di archi di un grafo si avvicina al numero massimo possibile, allora il
grafo viene considerato denso, viceversa, se il grafo contiene pochi archi, viene
considerato sparso. Un grafo completo ha tutti i possibili archi, dunque ha una
densità pari a 1.
3.3.2 Indicatori/metriche su grafo dinamico
Flooding time. Il processo di diffusione di un messaggio in un Contact Graph
𝐺(𝑉, 𝐸), è simulato supponendo che, ogni entità che può essere diffusa su una rete
di contatti, può essere modellata come un messaggio. Il processo è simulato in uno
scenario ideale, dove ciascun nodo ha un'infinita quantità di risorse e il ritardo di
trasmissione del messaggio non viene considerato.
Sia 𝑇 = 𝑡0, 𝑡1, … , 𝑡𝑛 , l'insieme di tutti gli istanti temporali in cui il grafo
varia nel tempo, viene definito un semplice protocollo di flooding, dove ∀𝑡𝑖 ∈ 𝑇, con
0 ≤ 𝑖 ≤ 𝑛, un nodo 𝑣 invia il messaggio a tutti i vicini e a loro volta i vicini di 𝑣
inviano il messaggio ai relativi vicini.
Al fine di modellare il processo di diffusione di un messaggio, viene definito
un messaggio 𝑀𝑣0,𝑡0 generato da un nodo 𝑣0 (chiamato seed) al tempo 𝑡0. Il nodo
𝑣0 viene scelto uniformemente fra tutti i nodi 𝑣 ∈ 𝑁𝑛𝑜𝑡 𝑖𝑠𝑜𝑙𝑎𝑡𝑒𝑑 , dove 𝑁𝑛𝑜𝑡 𝑖𝑠𝑜𝑙𝑎𝑡𝑒𝑑 ,
è l'insieme di tutti i nodi della rete non isolati e 𝑡0 è il primo tempo in cui il nodo 𝑣0
appare nella rete dinamica.
Viene utilizzando il protocollo di flooding, definito prima, per simulare un
processo di diffusione di un'informazione. Eseguendo il protocollo 20 volte,
calcolando una media dei risultati ottenuti per ogni simulazione, si può osservare
come in media cresce nel tempo il numero di nodi a cui il messaggio è arrivato. Nel
Capitolo 5 verrà usata tale osservazione per comparare i tempi diffusione di un

52
messaggio, tra le reti ottenute usando i modelli di mobilità e quelle ottenute a partire
dalle tracce di contatti reali.
Inter-contact time. Si tratta dell'intervallo di tempo che intercorre tra due successivi
contatti tra gli stessi nodi. Viene calcolato alla fine di ogni contatto e all'inizio del
successivo. Calcolando la Inter contact time distribution si può scoprire quale è la
probabilità che un contatto, tra due stessi nodi, si ripeta dopo un determinato
numero di secondi.
Intra-contact time (o contact duration). Misura l'intervallo di tempo durante il
quale due nodi possono comunicare; si tratta quindi del tempo che i nodi possono
utilizzare per scambiarsi dati e informazioni. Il numero di questi contatti e la loro
distribuzione sono fattori importanti per determinare la capacità di diffusione di un
messaggio, perché maggiore è il numero di contatti, maggiore è la probabilità che un
messaggio si diffonda in gran parte della rete. Calcolando la Intra contact time
distribution si può osservare quale è la probabilità di avere un contatto che duri un
determinato numero di secondi.
Temporal correlations.
La Conditional probability Distribution of link's existence è un indicatore ideato per
comprendere se, conoscendo l'esistenza passata di un contatto (rappresentato da un
arco del Contact Graph), è possibile avere informazioni riguardo la sua eventuale
esistenza futura.
Sia 𝐺(𝑉, 𝐸), un Contact Graph e sia 𝑇 = 𝑡0, 𝑡1, … , 𝑡𝑛 , l'insieme di tutti gli
istanti temporali in cui 𝐺 varia nel tempo. La probabilità di esistenza di un arco
𝑒 ∈ 𝐸, al tempo 𝑡𝑖 ∈ 𝑇, con 0 ≤ 𝑖 ≤ 𝑛, è definita come:
𝑃𝑒 = 𝑃 𝑋𝑒 𝑡𝑖 = 1 = 𝑃 𝑒
𝑇
dove 𝑃 𝑒 (cardinalità del presence schedule di 𝑒) è il numero di istanti in cui l'arco 𝑒
appare in 𝐺, e 𝑇 è il numero totale d'istanti temporali in cui 𝑒 può apparire.
Definite ora le seguenti probabilità condizionate:
𝑃𝑒,1 = 𝑃 𝑋𝑒 𝑡𝑖 = 1|𝑋𝑒 𝑡𝑖 − 1 = 1

53
𝑃𝑒,0 = 𝑃 𝑋𝑒 𝑡𝑖 = 1|𝑋𝑒 𝑡𝑖 − 1 = 0
𝑃𝑒,1 è la probabilità che l'arco 𝑒 esista al tempo 𝑡𝑖 ∈ 𝑇, con 0 ≤ 𝑖 ≤ 𝑛, sapendo che è
esistito anche al tempo 𝑡𝑖 − 1 ∈ 𝑇, mentre 𝑃𝑒 ,0 è la probabilità che l'arco 𝑒 esista al
tempo 𝑡𝑖 ∈ 𝑇 sapendo che non è esistito al tempo 𝑡𝑖 − 1 ∈ 𝑇.
Supponendo che la 𝑃𝑒 sia costante, si può facilmente stimare 𝑃𝑒 ,1 e 𝑃𝑒,0 nel seguente
modo:
𝑃𝑒 ,1 = 𝑥𝑒 𝑡 = 1 ∩ 𝑥𝑒 𝑡 − 1 = 1 𝑇
𝑡=1
(𝑥𝑒 𝑡 = 1)𝑇𝑡=1
𝑃𝑒 ,0 = 𝑥𝑒 𝑡 = 1 ∩ 𝑥𝑒 𝑡 − 1 = 0 𝑇
𝑡=1
(𝑥𝑒 𝑡 = 0)𝑇𝑡=1
Rapportando 𝑃𝑒 ,1 e 𝑃𝑒 ,0 a 𝑃𝑒 viene verificato se il valore di 𝑃𝑒 , dipenda dal fatto che
l'arco 𝑒 sia esistito o meno negli istanti di tempo precedenti. Pertanto, è possibile
verificare l'eventuale dipendenza temporale, osservando l'andamento dei rapporti
𝑃𝑒,1𝑃𝑒
e 𝑃𝑒 ,0
𝑃𝑒 , al crescere rispettivamente di 𝑃𝑒 ,1 e 𝑃𝑒 ,0.
Distance from stationarity. Nella metrica precedente per poter stimare 𝑃𝑒 ,1 e 𝑃𝑒 ,0 è
stato supposto che 𝑃𝑒 sia sempre costante. In realtà questa probabilità non è detto
che sia sempre uguale, potrebbe invece variare nel tempo. Per questo motivo, è stato
ideato un indicatore che misura la variabilità di 𝑃𝑒 nel tempo, detto Link's existence
variability.
Sia 𝐺(𝑉, 𝐸), un Contact Graph e sia 𝑇 = 𝑡0, 𝑡1, … , 𝑡𝑛 , l'insieme di tutti gli
istanti temporali in cui 𝐺 varia nel tempo. Definita 𝑒𝑝𝑜𝑐𝑎, un sottoinsieme di 𝑇,
costituito da un determinato numero di istanti temporali 𝑡𝑖 ∈ 𝑇, con 0 ≤ 𝑖 ≤ 𝑛, e
definito 𝑁𝐸 = 𝑇
𝑒𝑝𝑜𝑐𝑎 , con 𝑒𝑝𝑜𝑐𝑎 costante, il numero di epoche contenute in
𝑇, si definisce l'insieme delle 𝑒𝑝𝑜𝑐𝑒 come, 𝐸𝑃𝑂𝐻 = {𝑒𝑝1, 𝑒𝑝2, … , 𝑒𝑝𝑁𝐵}. Per ogni
𝑒𝑝𝑜𝑐𝑎 ∈ 𝐸𝑃𝑂𝐻 viene calcolata la probabilità di esistenza di un arco come:

54
𝑃𝑒 ,𝑖 =
𝑛𝑒 𝑒𝑝𝑖
𝑁𝐸 𝑐𝑜𝑛 𝑖 ∈ 1, … , 𝑁𝐸
dove 𝑛𝑒è il numero di volte che l'arco 𝑒 esiste nell'epoca 𝑒𝑝𝑖 . Analizzando
l'andamento medio di 𝑃𝑒 ,𝑖 nelle varie epoche, è possibile verificare se 𝑃𝑒 ha o meno
un andamento stazionario. Nel Capitolo 5 questa metrica sarà affiancata alla
Conditional probability Distribution of link's existence, con lo scopo di verificare l'eventuale
presenza di dipendenze temporali nelle comunicazioni tra persone, sia nelle reti
costruite usando i modelli di mobilità che in quelle ottenute a partire dalle tracce di
contatti reali.
Spatial correlation. In statistica, il Pearson correlation coefficient, tipicamente denotato
come r, è una misura di correlazione (dipendenza lineare) tra due variabili, 𝑋 e 𝑌,
che assume valori compresi tra +1 e −1. Questa misura, sviluppata da Karl Pearson nel
1880 [3][4], è ampiamente utilizzata per individuare schemi di comportamento,
conosciuti come assortative mixing e disassortative mixing [5][6][7], in dati provenienti da
campi eterogenei come: computer science, ecologia ed epidemiologia. Date due
variabili aleatorie 𝑋 e 𝑌, r è definito come:
r = corr X, Y =cov X, Y
𝜎𝑥𝜎𝑦=
XY − X Y
N
X2 − X 2
N Y2 −
Y 2
N
dove cov(X, Y) è la covarianza tra 𝑋 e 𝑌, 𝜎𝑥 è la deviazione standard di 𝑋 e 𝜎𝑦 è la
deviazione standard di 𝑌. La covarianza misura quanto le due variabili aleatorie
hanno lo stesso comportamento, mentre la deviazione standard misura quanto i
valori di 𝑋 e 𝑌 tendono ad essere vicini o lontani dalla media.
Utilizzando il Pearson correlation coefficient, è stata ideata una metrica con
l'obiettivo di verificare se esiste o meno una correlazione spaziale tra i contatti di una
Dynamic Contact Network 𝐺(𝑉, 𝐸), ovvero se l'esistenza di un contatto, in uno
specifico istante temporale, sia correlata o meno all'esistenza di uno o più contatti
avvenuti nello stesso istante temporale.

55
Definito 𝑇 = 𝑡0, 𝑡1, … , 𝑡𝑛 , l'insieme di tutti gli istanti temporali in cui 𝐺 varia nel
tempo, è posssibile modellare l'esistenza di ciascun arco 𝑒 ∈ 𝐸 per ogni ∀𝑡𝑘 ∈ 𝑇,
con 0 ≤ 𝑘 ≤ 𝑛, tramite la seguente variabile aleatoria:
𝑋𝑘 = 𝑋𝑡𝑘𝑇𝑡
dove:
𝑋𝑡𝑘 = 1 se l′arco 𝑒 esiste al tempo 𝑡𝑘 ∈ T
0 altrimenti
Sia 𝑚 = 𝐸 , la Pearson Correlation Matrix di 𝑚 variabili aleatorie
𝑋1, 𝑋2, … , 𝑋𝑚 è una matrice 𝑚 × 𝑚 è definita come:
𝑃𝐶𝑀 =
𝑟1,1 𝑟1,2 ⋯ 𝑟1,𝑚
⋮ ⋱ ⋮𝑟𝑚 ,1𝑟𝑚 ,2 ⋯ 𝑟𝑚 ,𝑚
dove l'elemento alla posizione 𝑖, 𝑗 è pari a 𝑟𝑖,𝑗 = 𝑐𝑜𝑟𝑟(𝑋𝑖 , 𝑋𝑗 ).
Calcolare la Pearson Correlation Matrix di tutti gli archi del Contact Graph ha un
costo computazionale 𝑂( 𝐸 2 × 𝑇 ), dove 𝑇 è il numero di tutti gli istanti
temporali in cui un arco può esistere. Per ridurlo, è stato deciso di calcolare per ogni
cluster le matrici di correlazione, di dimensione 10 × 10, ciascuna su i primi 10
archi, con peso più alto, estrapolati da ogni cluster, ottenuto partizionando il grafo
secondo la modularity. In questo modo il costo computazionale diventa:
𝑂 𝑛𝑢𝑚𝑐𝑜𝑚𝑚𝑢𝑛𝑖𝑡𝑦 × 102 × 𝑇
dove 𝑛𝑢𝑚𝑐𝑜𝑚𝑚𝑢𝑛𝑖𝑡𝑦 è il numero di cluster identificati usando la modularity.
3.4 Rappresentazioni di grafi dinamici
Per analizzare reti dinamiche di contatti attraverso la piattaforma software Gephi,
descritta nel paragrafo 4.1, si ha bisogno di un formato che permetta di descrivere, in
modo compatto su file, la struttura e le caratteristiche di una Dynamical Contact
Network.
Nei prossimi due paragrafi verranno descritti i limiti del formato attualmente
più utilizzato e il nuovo formato che è stato ideato per superarli.

56
3.4.1 Graph Exchange XML Format (GEXF)
Il formato più comunemente usato per descrivere in modo compatto la
struttura e le caratteristiche di una rete di contatti dinamica, è il Graph Exchange XML
Format (GEXF, http://gexf.net/). Nel listato 3.1 è possibile vedere un esempio di file
GEXF, che descrive un grafo statico formato da due nodi, collegati da un arco.
L'attributo mode può valere static o dynamic, static se il grafo non si evolve nel tempo,
dynamic nel caso opposto. L'attributo defauleddgetype può valere directed, o undirected, o
mixed, directed se il grafo è diretto, undirected se il grafo non è diretto e mixed se è
entrambe le cose. A ciascun nodo/arco si possono associare degli attributi.
<gexf xmlns="http://www.gexf.net/1.2draft" version="1.2">
<meta lastmodifieddate="2009-03-20">
<creator>Gexf.net</creator>
<description>A hello world! file</description>
</meta>
<graph mode="static" defaultedgetype="directed">
<nodes>
<node id="0" label="Hello" />
<node id="1" label="Word" />
</nodes>
<edges>
<edge id="0" source="0" target="1" />
</edges>
</graph>
</gexf>
Listato 3.1: Esempio di rappresentazione di un piccolo file che descrive un grafo statico contenente 2 nodi e un arco che li collega.
Nel listato 3.2 si vede che un attributo ha un titolo/nome, un valore e un tipo
(string, integer, boolean,…). Il titolo/nome dell'attributo deve essere dichiarato per
tutto il grafo. Se si vuole descrivere un Dynamic Contact Graph, si deve associare
all'intero grafo, a ciascun nodo, a ciascun arco e a ciascun valore dei rispettivi
attributi, una sequenza di intervalli temporali per cui essi esistono. Se lo stesso nodo
o arco esiste in diversi intervalli temporali, si possono definirli e associarli ad esso
utilizzando l'elemento XML <spells> (il listato 3.3 ne mostra un esempio).
<graph defaultedgetype="directed">
<attributes class="node">
<attribute id="0" title="url" type="string"/>
<attribute id="1" title="indegree" type="float"/>
<attribute id="2" title="frog" type="boolean">
<default>true</default>
</attribute>
</attributes>
<nodes>

57
<node id="0" label="Gephi">
<attvalues>
<attvalue for="0" value="http://gephi.org"/>
<attvalue for="1" value="1"/>
</attvalues>
</node>
<node id="1" label="Webatlas">
<attvalues>
<attvalue for="0" value="http://webatlas.fr"/>
<attvalue for="1" value="2"/>
</attvalues>
</node>
</nodes>
<edges>
<edge id="0" source="0" target="1"/>
</edges>
</graph>
Listato 3.2: Esempio di come si definiscono ed associano attributi ai nodi.
Supponendo ora di dover rappresentare, nel formato GEXF, un grafo dinamico
ottenuto da un esperimento durato circa 7 giorni, ossia circa 604800 secondi.
L'elevato numero di intervalli temporali associati a ciascun nodo/arco, non essendo
rappresentati in modo compatto, creano file di notevoli dimensioni, che risultano
difficilmente manipolabili per i scopi del presente lavoro di tesi. Dato che si
potrebbero condurre esperimenti dalla durata significativamente estesa, è stato deciso
di stilare un nuovo formato che permetta una rappresentazione più compatta e
facilmente manipolabile. Tale formato, che verrà descritto nel prossimo paragrafo, è
stato chiamato Dynamic Network Format (DNF).
<node id="1001">
<spells>
<spell start="1335090239" end="1335090241" />
<spell start="1335090242" end="1335090243" />
<spell start="1335090244" end="1335090249" />
</spells>
</node>
Listato 3.3: Esempio di rappresentazione di un nodo con l'elemento <spells>.
3.4.2 Dynamic Network Format (DNF)
Il Dynamic Network Format (DNF) è un nuovo formato proposto nel presente lavoro
di tesi per rappresentare Dynamic Contact Network, reti che includono informazioni
riguardo la loro evoluzione nel tempo. L'idea che sta alla sua base, che lo rende
veramente efficiente in termini di occupazione di memoria rispetto al GEXF, è quella
di usare gap incrementali tra timestamp (in formato UNIX).

58
Ad esempio, supponendo che il nodo identificato dal numero 1001 esista nei
seguenti timestamp:
1335090242, 1335090243, 1335090246, 1335090247, 1335090249
e che il tempo in cui inizia l'esperimento sia 1335090220, allora il primo gap del
nodo sarà la differenza tra, il primo timestamp che esso ha associato e il tempo iniziale
dell'esperimento, pari a 1335090242 − 1335090220 = 22.
I gaps successivi saranno calcolati rispetto al timestamp che li precede. Ad
esempio, il secondo gap vale 1335090243 − 1335090242 = 1 e l'ultimo gap vale
1335090249 − 1335090247 = 2. Il nodo nel file DNF sarà rappresentato come
segue:
[1001] (22,1,3,1,2)
Inoltre, per ridurre ulteriormente la dimensione del file, DNF gestisce i timestamps
contigui. Questi sono rappresentati dal simbolo "+" seguito dal numero di istanti
continui, escludendo il primo.
Ad esempio il nodo identificato dal numero 1003 esiste nei seguenti timestamps:
1335090249, 1335090251, 1335090252, 1335090253, 1335090254, 1335090259
Allora nel file DNF sarà rappresentato come:
[1003] (29,2, +3,5)
dove "29" è il primo gap tra il timestamp 1335090249 e quello da cui parte
l'esperimento (1335090220), "2" è il gap tra il timestamp 1335090251 e
1335090249, "+3" è un gap contiguo per i timestamps: 1335090251 (escluso),
1335090252, 1335090253, 1335090254; l'ultimo gap "5" è la differenza tra
1335090249 e 1335090254.
Il primo istante di una sequenza di gap (nell'esempio di prima 1335090251)
viene escluso per gestire il relativo gap con il timestamp precedente. Allo stesso modo,
tutto quello che è statodetto per i nodi è valido anche per gli archi. Ad esempio un

59
arco che connette due nodi con identificativo 1010 e 1089 può essere descritto
come segue:
1010,1089 39,1, +7,3, +2,10
Utilizzando la rappresentazione DNF è stata ottenuta una notevole diminuzione della
grandezza dei file, contenenti le tracce di contatti, collezionate negli esperimenti
SocialDIS e MACRO. Nel caso dell'esperimento SocialDis, il file formato GEXF
occupa 40MB, mentre in versione DNF solo 2 MB.
3.4.2.1 Sintassi
Il formato DNF ha una sintassi che permette di definire in modo preciso una
Dynamic Contact Network. Il file è costituito da tre parti chiamate, header, nodes ed
edges, separate da linee vuote. Una linea vuota separa header da nodes e una seconda
linea vuota separa nodes da edges.
Header.
Nell'header vengono inserite le caratteristiche del grafo e le definizioni degli attributi
associati a nodi/archi, come segue: nella prima riga viene definito il tipo di grafo, che
può essere statico o dinamico, la tipologia degli archi, che possono essere diretti o
non diretti (o entrambe le cose), seguendo la seguente sintassi:
𝑔𝑟𝑎𝑝𝑡𝑦𝑝𝑒: {𝑠𝑡𝑎𝑡𝑖𝑐 | 𝑑𝑦𝑛𝑎𝑚𝑖𝑐}, 𝑑𝑒𝑓𝑎𝑢𝑙𝑡𝑒𝑑𝑔𝑒𝑡𝑦𝑝𝑒: {𝑢𝑛𝑑𝑖𝑟𝑒𝑐𝑡𝑒𝑑 | 𝑑𝑖𝑟𝑒𝑐𝑡𝑒𝑑 | 𝑚𝑖𝑥𝑒𝑑}
nella seconda riga vengono definite le informazioni riguardanti la dinamicità del
grafo, ossia il tempo in cui comincia ad evolversi ed il tempo in cui si ferma, secondo
la seguente sintassi:
𝑑𝑦𝑛𝑎𝑚𝑖𝑐𝑠: {𝑠𝑡𝑎𝑟𝑡 = 𝑣𝑎𝑙𝑢𝑒, 𝑒𝑛𝑑 = 𝑣𝑎𝑙𝑢𝑒, 𝑡𝑖𝑚𝑒𝑢𝑛𝑖𝑡 = 𝑣𝑎𝑙𝑢𝑒}
Se il grafo è dinamico, l'attributo "start" è obbligatorio, mentre l'attributo "end" può
essere omesso. Se il grafo è statico la riga dovrà essere scritta come segue:
𝑑𝑦𝑛𝑎𝑚𝑖𝑐𝑠: {}

60
L'attributo 𝑡𝑖𝑚𝑒𝑢𝑛𝑖𝑡 (non obbligatorio) definisce quanto deve essere lungo un gap.
Ad esempio, se definiamo un 𝑡𝑖𝑚𝑒𝑢𝑛𝑖𝑡 = 5, un gap sarà lontano dal gap che lo
precede di cinque unità di tempo. Dunque se il gap vale ad esempio +3, in realtà
considera 3 × 5 = 15 unità di tempo trascorse dal gap che lo precede. Se il
𝑡𝑖𝑚𝑒𝑢𝑛𝑖𝑡 non viene definito, il suo valore predefinito sarà pari a 1.
Nella terza riga vengono definiti gli eventuali attributi di nodi/archi, seguendo la
seguente sintassi:
𝑛𝑜𝑑𝑒𝑎𝑡𝑡𝑟𝑠: {𝑙𝑎𝑏𝑒𝑙, 𝑎𝑡𝑡𝑟1, 𝑎𝑡𝑡𝑟2, . . . }, 𝑒𝑑𝑔𝑒𝑎𝑡𝑡𝑟𝑠: {𝑙𝑎𝑏𝑒𝑙, 𝑤𝑒𝑖𝑔𝑡, 𝑎𝑡𝑡𝑟1,𝑎𝑡𝑡𝑟2, . . . }
l'attributo 𝑙𝑎𝑏𝑒𝑙 può essere omesso se è uguale all'id del nodo/arco. Si tiene a
precisare che il tipo di ciascun attributo/campo è considerato una stringa.
Nodes.
In questa parte del file, separata dalla precedente con una riga vuota, è contenuta la
descrizione dei nodi del grafo come segue:
[𝑛𝑜𝑑𝑒𝐼𝐷] {𝑙𝑎𝑏𝑒𝑙_𝑣𝑎𝑙𝑢𝑒, 𝑎𝑡𝑡𝑟1_𝑣𝑎𝑙𝑢𝑒, 𝑎𝑡𝑡𝑟2_𝑣𝑎𝑙𝑢𝑒, . . . } (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . )
dove 𝑙𝑎𝑏𝑒𝑙_𝑣𝑎𝑙𝑢𝑒 è da assegnare solo se nel primo elemento di 𝑛𝑜𝑑𝑒𝑎𝑡𝑡𝑟𝑠 è stato
specificato 𝑙𝑎𝑏𝑒𝑙, altrimenti la riga sarà:
[𝑛𝑜𝑑𝑒𝐼𝐷] {𝑣𝑎𝑙𝑢𝑒_𝑜𝑓_𝑎𝑡𝑡𝑟1,𝑣𝑎𝑙𝑢𝑒_𝑜𝑓_𝑎𝑡𝑡𝑟2, . . . } (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . )
dove i valori degli attributi sono assegnati se e solo se sono stati definiti nella
corrispettiva lista contenuta dell'header, altrimenti la riga dovrà essere come segue:
[𝑛𝑜𝑑𝑒𝐼𝐷] (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . )
dove (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . ) sono presenti se e solo se il grafo è di tipo dinamico.
Edges.
Questa parte del file, separata dalla precedente con una riga vuota, contiene la
descrizione degli archi non diretti del grafo, con la seguente sintassi:

61
[𝑠𝑜𝑢𝑟𝑐𝑒𝐼𝐷, 𝑡𝑎𝑟𝑔𝑒𝑡𝐼𝐷] {𝑙𝑎𝑏𝑒𝑙_𝑣𝑎𝑙𝑢𝑒, 𝑤𝑒𝑖𝑔𝑡_𝑣𝑎𝑙𝑢𝑒, 𝑎𝑡𝑡𝑟1_𝑣𝑎𝑙𝑢𝑒, 𝑎𝑡𝑡𝑟2_𝑣𝑎𝑙𝑢𝑒, . . . } (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . )
dove i due nodi che identificano l'arco sono separate da "," se non sono diretti,
mentre da ">" se sono diretti. In quest'ultimo caso, il primo nodo è il source e il
secondo è il target. 𝑙𝑎𝑏𝑒𝑙_𝑣𝑎𝑙𝑢𝑒 è presente se e solo se il primo elemento di
𝑒𝑑𝑔𝑒𝑎𝑡𝑡𝑟𝑠 è 𝑙𝑎𝑏𝑒𝑙, altrimenti la riga sarà:
[𝑠𝑜𝑢𝑟𝑐𝑒𝐼𝐷, 𝑡𝑎𝑟𝑔𝑒𝑡𝐼𝐷] {𝑤𝑒𝑖𝑔𝑡_𝑣𝑎𝑙𝑢𝑒, 𝑣𝑎𝑙𝑢𝑒_𝑜𝑓_𝑎𝑡𝑡𝑟1, 𝑣𝑎𝑙𝑢𝑒_𝑜𝑓_𝑎𝑡𝑡𝑟2, . . . } (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . )
dove 𝑤𝑒𝑖𝑔𝑡_𝑣𝑎𝑙𝑢𝑒 è presente se e solo se esiste la definizione dell'attributo in
𝑒𝑑𝑔𝑒𝑎𝑡𝑡𝑟𝑠, altrimenti la riga sarà:
[𝑠𝑜𝑢𝑟𝑐𝑒𝐼𝐷, 𝑡𝑎𝑟𝑔𝑒𝑡𝐼𝐷] {𝑙𝑎𝑏𝑒𝑙_𝑣𝑎𝑙𝑢𝑒, 𝑣𝑎𝑙𝑢𝑒_𝑜𝑓_𝑎𝑡𝑡𝑟1, 𝑣𝑎𝑙𝑢𝑒_𝑜𝑓_𝑎𝑡𝑡𝑟2, . . . } (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . )
dove i valori degli attributi sono presenti se e solo se sono stati definiti in
𝑒𝑑𝑔𝑒𝑎𝑡𝑡𝑟𝑠, altrimenti la riga sarà:
[𝑠𝑜𝑢𝑟𝑐𝑒𝐼𝐷, 𝑡𝑎𝑟𝑔𝑒𝑡𝐼𝐷] (𝑙𝑎𝑏𝑒𝑙_𝑣𝑎𝑙𝑢𝑒, 𝑤𝑒𝑖𝑔𝑡_𝑣𝑎𝑙𝑢𝑒, 𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . )
dove (𝑔𝑎𝑝1, 𝑔𝑎𝑝2, 𝑔𝑎𝑝3, . . . ) sono presenti se e solo se il grafo è di tipo dinamico.
3.4.2.2 Esempi
Nei listati 3.4, 3.5, 3.6 e 3.7, vengono mostrati alcuni esempi di file in formato DNF.
graphtype:{static}, defaultedgetype:{undirected}
dynamics:{}
nodeattrs:{}, edgeattrs:{}
[1001]
[1002]
[1003]
[1004]

62
[1001,1002]
[1001,1003]
[1002,1004]
Listato 3.4 Mostra la rappresentazione di un grafo statico, dove ai nodi/archi non sono stati definiti attributi e labels. graphtype:{static}, defaultedgetype:{directed} dynamics:{} nodeattrs:{label,gender,age}, edgeattrs:{label} [1001] {Bob,M,22} [1002] {Melany,F,23} [1003] {Mike,M,20} [1004] {Alice,F,25} [1001,1002] {Bob_Melany} [1001,1003] {Bob_Mike} [1002,1004] {Melany_Alice}
Listato 3.5 Mostra la rappresentazione di un grafo statico, dove a ciascun nodo/arco sono stati definiti ed assegnati degli attributi. graphtype:{dynamic}, defaultedgetype:{mixed} dynamics:{start=1318836335,end=1319208605} nodeattrs:{}, edgeattrs:{} [1001] (10,+3,2,+4) [1002] (11,+2,31) [1003] (9,+10,2) [1004] (12,1,31,+2) [1001>1002] (11,1) [1001,1003] (10,+3) [1002>1004] (12,1,31)
Listato 3.6 Mostra la rappresentazione di un grafo dinamico, senza attributi e con archi di tipo misto. graphtype:{dynamic}, defaultedgetype:{undirected} dynamics:{start=1318836335} nodeattrs:{gender,age}, edgeattrs:{weight} [1001] {M,22} (10,+3,2,+4) [1002] {F,23} (11,+2,31) [1003] {M,20} (9,+10,2) [1004] {F,25} (12,1,31,+2) [1001,1002] {2} (11,1)

63
[1001,1003] {2} (10,+3) [1002,1004] {3} (12,1,31)
Listato 3.7 Mostra un grafo dinamico, con attributi ed archi pesati.

64
Capitolo 4
Sistema per l'analisi di
grafi dinamici
L’obiettivo di questo Capitolo è quello di illustrare: la piattaforma software
adottata per la visualizzazione e la manipolazione di grafi dinamici, i plugin
implementati per importare grafi secondo il formalismo DNF (descritto nel capitolo
precedente), simulare la dinamicità temporale del grafo dei contatti, generare grafi a
partire dai modelli di mobilità (descritti nel Capitolo 3) e calcolare gli indicatori
statistici/metriche (descritte nel Capitolo 3).
4.1 Gephi Platform
Gephi [11] (http://gephi.org) è un framework per l'analisi, manipolazione e
visualizzazione di grafi, che fornisce dei tools per studiare non solo complesse reti
statiche, ma anche grandi reti dinamiche. Gephi è un software open source, basato
sulla piattaforma Netbeans, le cui principali feature permettono di filtrare, navigare,
manipolare e applicare tecniche di clustering su grafi.
Tra i vari tool che il framework offre, la componente Timeline è una semplice
interfaccia che permette di selezionare un determinato intervallo temporale e di
visualizzare ed esplorare il grafo corrispondente. Per la visualizzazione di grandi reti,
esso utilizza un motore di rendering 3D che ne permette la navigazione in tempo
reale, come mostrato in Fig.4.1.
Nelle figure 4.2 e 4.3 viene mostrata l'architettura modulare di Gephi, che
rende facilmente comprensibile ed espandibile il codice, in modo da estendere le sue
funzionalità tramite l'implementazione di plugin. Queste possono usufruire delle
seguenti API (vengono elencate solo quelle usate nell'ambito della tesi) che ciascuno
dei moduli della piattaforma Gephi offre:

65
Graph API: permettono di manipolare la struttura dati rappresentante il
grafo, inteso come collezione di nodi e archi che possono essere diretti, non
diretti o entrambe le cose. Ad esempio, di un grafo è possibile iterare i nodi
o gli archi, ottenere il numero totale di nodi/archi, il degree di ciascun nodo o
creare sottografi (detti viste).
Attributes API: associano a ciascun nodo/arco dati aggiuntivi, chiamati
attributi. Gli attributi possono essere di tipo primitivo (Integer, Boolean,
String, …), di tipo lista o di tipo dinamico.
Import API: permette di importare dati da ogni tipo di supporto (file,
database, streams).
Statistics API: forniscono gli algoritmi che calcolano metriche/statistiche.
Le statistiche tipicamente usano i dati della rete per generare risultati per ogni
nodo/arco (degree, clustering coefficient, hits, …) o globalmente per tutto il
grafo.
Dynamic API: API dedicate ai grafi dinamici, che vengono maggiormente
descritte nel paragrafo successivo.
Generator API: creano grafi a partire da un insieme di proprietà seocondo
degli algoritmi di generazione.
LongTask API: usate dagli altri moduli (Statistics, Generator, Import, …)
per eseguire lunghi task (o processi) in threads separati, supportando la
visualizzazione del loro progresso, la gestione degli errori che possono
generare, e la loro cancellazione.
Oltre ad una vasta gamma di API, Gephi offre anche le rispettive SPI (Service
Provider Interface), che forniscono interfacce java implementabili. Ad esempio, se si
vuole aggiungere una nuova metrica/statistica, o un nuovo importatore, o un
nuovo algoritmo di generazione di grafi, basta sviluppare un plugin che
implementa rispettivamente le interfacce Statistics, o Import o Generator.

66
Fig.4.1: Screenshot di Gephi che mostra il rendering 3D di un grafo.
Fig.4.2: Grafico che mostra l'architettura ad alto livello framework Gephi.

67
Fig.4.3: Grafico che mostra l'architettura ad alto livello della piattaforma Gephi, dal
punto di vista dello sviluppatore di plugin.
4.1.1 Gephi Dynamic API
Le Dynamic API sono state sviluppate, in occasione del GSoC (Google Summer of Code)
2011 dallo studente Cezary Bartosiak, per fornire delle funzioni che permettano di
eseguire query su grafi dimamici.
Le idee principali che vi sono dietro sono:
Interval Tree [9] per la memorizzazione di attributi dinamici, definiti come
DynamicType<T>, dove T e Type possono essere un qualsiasi tipo di dato
supportato da Java. Questi attributi dinamici permettono di associare un
valore tempo variabile a ciascun nodo/arco;
DynamicGraph è la rappresentazione del grafo dinamico che permette di
visualizzarlo e manipolarlo.
Queste API non si sono dimostrate adatte per gli scopi del presente lavoro per i
seguenti motivi:
1. Gephi bug. Sviluppando in un primo momento le metriche dinamiche con le
dynamic API di Gephi, sono stati osservati dei casi in cui il grafo genera, nella
struttura dati proprietaria di Gephi, un'eccezione di tipo null pointer exception.

68
Isolando questi casi, si è provato poi a calcolare metriche dinamiche già
implementate in Gephi (es. #edge al variare del tempo) e l'eccezione si è
ripresentata. L'errore è stato segnalato e successivamente confermato dagli
sviluppatori di Gephi.
2. Elevato tempo d'importazione. Durante l'implementazione del DNF
importer (descritto nel paragrafo 4.3) è stato riscontrato che il tempo di
importazione di un grafo costituito da 116 nodi, 296 archi e 372270 istanti
temporali è di ≅ 38 minuti. Nonostante si siano tentate varie ottimizzazioni,
esiste un "collo di bottiglia" quando vengono processati nodi o archi presenti
per più di 20000 istanti temporali. Effettuando diversi test è stato verificato
che la causa è il metodo addTimeInterval. Questo metodo, fornito dalle dynamic
API di Gephi, assegna un intervallo temporale ad un nodo/arco.
3. Rapida saturazione della JVM heap memory. Le metriche sviluppate
secondo il paradigma delle dynamic API saturano velocemente l'heap memory
della JVM, settato a 1,5 Gbyte.
Dato che il bug riscontrato nell'esecuzione delle metriche dinamiche non dipende
dalle motivazioni provvisorie che ci sono state fornite dagli sviluppatori di Gephi,
che i tempi di calcolo sono troppo elevati e che l'heap memory satura velocemente, è
stato sviluppato un modulo proprietario per simulare la dinamicità del grafo,
chiamato DNF Dynamic (illustrato nel paragrafo più sotto).
4.2 DNF Dynamic
Per superare le limitazioni (descritte più sopra) delle Dynamic API, è stato
ideato ed implementato un nuovo modulo che simula la dinamicità temporale del
grafo dei contatti con prestazioni elevate in termini di tempo di calcolo e quantità di
memoria allocata. L'idea alla sua base è quella di non assegnare ad ogni nodo/arco
una lista di TimeInterval per rappresentare il relativo presence schedule, ma associare una
lista di Long contenente tutti i timestamp (formato UNIX time) in cui essi occorrono.
Questa semplice modifica ha ridotto drasticamente i tempi d'importazione di un
grafo rappresentato su file nel formato DNF. Ad esempio, per importare un grafo
costituito da 116 nodi, 296 archi e 372270 istanti temporali, siamo passati da ≅ 38
minuti a 3 millisecondi. In figura 4.4 viene mostrato il class diagram del plugin.

69
Fig.4.4: Viene mostrato il Class diagram delle principali classi che costituiscono il
modulo DNF Dynamic. Per una migliore leggibilità del grafico non vengono
mostrati i metodi della classe Int2ObjectLinkedOpenHashMap.
Per poter simulare la dinamicità del grafo dei contatti, ossia sapere se in un
determinato timestamp uno specifico nodo/arco esiste, viene eseguito un
preprocessamento, in cui si costruisce la seguente struttura dati: Una
Int2ObjectLinkedOpenHashMap [10] che ha per chiavi l'id dei nodi o degli archi e come
valore un LongLinkedOpenHashSet [10] contenente i timestamps in cui essi occorrono.
L'Int2ObjectLinkedOpenHashMap e il LongLinkedOpenHashSet sono rispettivamente, un
hash map ed un hash set, progettati e sviluppati da Sebastiano Vigna [10], per essere
significativamente più performanti in termini di memoria allocata e tempi di calcolo

70
rispetto a quelle fornite dal Java Collection Framework. Il DNF Dynamic offre i
seguenti metodi per interrogare la struttura dati:
getNodePresenceSchedule: di un nodo restituisce rispettivo presence schedule,
rappresentato da un array di zero e uno, uno se il nodo occorre in un
determinato timestamp, zero nel caso opposto.
getEdgePresenceSchedule: di un arco restituisce rispettivo presence schedule,
rappresentato da un array di zero e uno, uno se l'arco occorre in un
determinato timestamp, zero nel caso opposto.
getSnapshotGraph: restituisce una vista (o sottografo) del grafo dinamico
per un determinato timestamp.
node_in_time: verifica l'occorenza di un nodo ad un determinato
timestamp. Restituisce True se esiste, False altrimenti.
edge_in_time: verifica l'occorenza di un arco ad un determinato timestamp.
Restituisce True se esiste, False altrimenti.
getEdgeTimes: restituisce la lista dei timestamps in cui l'arco esiste.
getNodeTimes: restituisce la lista dei timestamps in cui il nodo esiste.
getMostFrequencyEdgeID: restituisce l'id dell'arco che occorre più
frequentemente nel tempo.
getNMostFrequencyEdgeID: restituisce i primi 10 archi che occorrono
più frequentemente nel tempo (in ordine decrescente).
Abbandonando l'uso delle Dynamic API di Gephi e adottando invece il
nuovo modulo implementato, si riescono a sviluppare indicatori statistici/metriche
dinamici efficienti. Ad esempio re-implementando la metrica del Flooding time
utilizzando il DNF Dynamic, applicata ad un grafo costituito da 116 nodi, 296 archi e
372270 istanti temporali, si ottengono gli stessi risultati, passando da ≅ 2 ore di
calcolo e almeno 1Gbyte di heap memory allocata, a ≅ 1,5 minuti di calcolo e meno
di 500Mbyte di heap memory allocata. Il difetto del DNF Dynamic è che può essere
applicato solo a grafi rappresentati nel formato DNF, mentre il pregio è che non è
soggetto al bug (illustrato più sopra) e i tempi di esecuzione delle metriche dinamiche
migliorano significativamente.

71
4.3 DNF Importer
Il primo plugin che è stato sviluppato serve ad importare grafi che adottano il
formato DNF (definito nel capitolo 3). Viene consentito sia di importare grafi in
forma aggregata (senza memorizzare il presence schedule di nodi/archi e assegnando
a ciascun arco un peso pari alla sua frequenza), sia in forma dinamica (memorizzando
i presence schedule di nodi/archi). Analizzando i dati raccolti nell'esperimento
SocialDis, è stato osservato che spesso un contatto tra due individui viene considerato
terminato solo perché questi hanno posizionato in modo scorretto il tag RFID.
Ad esempio, un individuo A può averlo posizionato all'altezza delle gambe e
un individuo B può averlo posizionato all'altezza del petto.
In questo caso la comunicazione face-to-face tra A e B può subire diverse
disconnessioni di pochi secondi, nonostante essi continuino a comunicare uno di
fronte all'altro. Per diminuire gli effetti di questa anomalia è stato deciso di introdurre
una soglia entro la quale una disconnessione non viene considerata come
interruzione del contatto. Tramite la GUI del plugin è possibile decidere il valore
della soglia. Se la durata della disconnessione è inferiore a tale valore, questa non
viene considerata come interruzione.
Il plugin, sviluppato seguendo la guida "How to write an import" [27], è costituito dalle
seguenti classi (mostrate in figura 4.5):
DnfImporter: implementa le SPI FileImporter e LongTask. Utilizza due
hash map, che hanno rispettivamente come chiavi due oggetti di tipo
NodeDraft e EdgeDraft, e come valore i relativi presence schedule. Durante
il parsing del file vengono popolate le hash map e i dati da esse contenuti
vengono inseriti nelle strutture dati, che memorizzano il grafo con i suoi
attributi.
DnfImporterBuilder: implementa FileImporterBuilder, aggiunge il nuovo
formato di file con estensione .dnf e registra la nuova implementazione della
SPI Importer.
IllegalValueException: classe di eccezione che identifica le eccezioni
lanciate a causa di valori errati contenuti nel file dnf.
ValidationType: classe statica che serve a validare il tipo di numero
contenuto in una stringa (Integer, Float, Double, Long).

72
Fig.4.5: Viene mostrato il Class diagram delle principali classi che costituiscono il
DNF Importer. Per rendere leggibile il grafico non vengono omesse le definizioni
delle variabili e dei metodi delle classi.
4.4 Mobility Model Generator
Al fine di poter effettuare l'analisi illustrata nel Capitolo 5, ossia osservare
quanto i dati generati a partire dai modelli di mobilità siano vicini o lontani dai dati
generati a partire dagli esperimenti condotti nel mondo reale, sono state iplementate
due plugin seguendo la guida "How to write a graph generator" [28], che generano grafi
rispettivamente secondo il RW mobility model e il TLW mobility model.
4.4.1 Mobility Simulator
La piattaforma Gephi non offre delle API per poter simulare modelli di
mobilità, pertanto è stato deciso di sviluppare un modulo che consenta a tutti i

73
plugin, che generano grafi a partire da modelli mobilità, di settare un ambiente di
simulazione, dove i nodi, nel tempo, si muovono ed eventualmente collidono. E'
stato ideato un modulo costituito dall'interfaccia IMobilityEnviromentSimulator, dove
sono definiti i metodi, che tipicamente servono a simulare la mobilità dei nodi
secondo un qualsiasi mobility model. Tali metodi servono a:
settare e restituire: posizione, velocità, tempo di pausa, raggio di copertura e
angolo di rotazione di un nodo;
restituire un sottoinsieme costituito dagli id dei nodi la cui distanza da
percorrere è uguale o inferiore alla rispettiva velocità, in modo da conoscere
quali nodi sono arrivati a destinazione;
restituire il sottoinsieme degli id dei nodi la cui velocità è pari a zero, in modo
da sapere quali nodi devono mettersi in pausa;
restituire un sottoinsieme contenente gli id dei nodi la cui velocità è pari a
zero e il cui tempo d'attesa è minore di zero, per sapere quali sono i nodi che
hanno atteso abbastanza tempo e che possono quindi ripartire per una nuova
destinazione;
restituire "vero" se due nodi sono entrati nei rispettivi raggi di copertura,
"falso" altrimenti.
Posizione, velocità, tempo di pausa, raggio di copertura e angolo di rotazione di
ciascun nodo, sono memorizzate nelle Int2DoubleLinkedOpenHashMap [10], che hanno
come chiavi gli id dei rispettivi nodi.
4.4.2 Random Waypoint Mobility Model Generator
Il plugin è costituito dalle seguenti classi (mostrate in figura 4.6):
RWMobilityModel: genera grafi secondo il modello di mobilità RW
(descritto nel Capitolo 2). Il metodo Init assegna a ciascun nodo la posizione
iniziale, la velocità iniziale, il raggio di copertura e il punto di arrivo. Il
metodo generate avvia la simulazione, che consiste di quattro step, che si
ripetono ad ogni iterazione:
1. Verificare per ogni coppia di nodi se questi sono entrati nei rispettivi
raggi di copertura. Se l'esito è positivo viene aggiunta alle due
Object2ObjectLinkedOpenHashMap [10], chiamate map_edgedraft_time
e map_nodedraft_time (che hanno per chiave rispettivamente un

74
EdgeDraft e un NodeDraft e per valore la lista dei timestamp
associati), il tempo in cui è avvenuto il contatto. Aggiornare la
posizione di ciascun nodo e calcolare la distanza che lo separa dal
punto di arrivo.
2. Ai nodi che sono arrivati a destinazione, viene settata la velocità a
zero e viene assegnato un waiting time, il cui valore è scelto
casualmente da una distribuzione uniforme.
3. Ai nodi che sono in attesa viene decrementato il waiting time.
4. Ai nodi per cui il waiting time è arrivato a zero, vengono assegnate
una nuova destinazione e una nuova velocità.
RWMobilityEnviromentSimulator: implementa i metodi definiti
nell'interfaccia IMobilityEnviromentSimulator e un metodo che restituisce un
numero random da una distribuzione uniforme.
RWMobilityModelUI: interfaccia che estende l'interfaccia GeneratorUI.
RWMobilityModelUIImpl: implementa l'interfaccia RWMobilityModelUI e
serve gestire l'interfaccia grafica di configurazione del modello di mobilità.
RWMobilityModelPanel: implementa l'interfaccia grafica del pannello di
configurazione dei parametri (velocità minima e massima, tempo di pausa,
numero di'iterazioni, …), che vengono passati alle variabili del modello di
mobilità.
4.4.3 Truncated Lèvi Walk Mobility Model Generator
Le principali classi del plugin sono le seguenti:
TLWMobilityModel: Genera grafi secondo il modello di mobilità TLW
(descritto nel Capitolo 2). Il metodo Init assegna a ciascun nodo la posizione
iniziale, la velocità iniziale, il raggio di copertura, la direzione e la lunghezza
della flight. Il metodo generate avvia la simulazione, che consiste di 5 step, che
si ripetono ad ogni iterazione:
1. Verificare per ogni coppia di nodi se questi sono entrati nei rispettivi
raggi di copertura. Se l'esito è positivo viene aggiunta alle due
Object2ObjectLinkedOpenHashMap [10], chiamate map_edgedraft_time
e map_nodedraft_time (che hanno per chiave rispettivamente un
EdgeDraft e un NodeDraft e per valore la lista dei timestamp

75
associati), il tempo in cui è avvenuto il contatto. Aggiornare la
posizione di ciascun nodo.
2. Ai nodi che raggiungono i confini dell'area di simulazione viene fatta
cambiare direzione.
3. Ai nodi che sono arrivati a destinazione, viene settata la velocità a
zero e viene assegnato un waiting time, il cui valore è scelto
casualmente da una distribuzione power law (definita nella classe
TLWMobilityEnviromentSimulator).
4. Ai nodi che sono in attesa, viene decrementato il waiting time.
5. Ai nodi per cui il waiting time è arrivato a zero, vengono assegnate
una nuova lunghezza di flight, scelta casualmente da una distribuzione
power law (definita nella classe TLWMobilityEnviromentSimulator) e
una nuova velocità proporzionale alla lunghezza della flight:
𝑓𝑙𝑖𝑔𝑡 𝑙𝑒𝑛𝑔𝑡
10.
TLWMobilityEnviromentSimulator: implementa i metodi definiti
nell'interfaccia IMobilityEnviromentSimulator e un metodo che restituisce un
numero random dalla seguente Power law Distribution: 𝑥1𝑛+1 − 𝑥0
𝑛+1 ∗
𝑦 + 𝑥0𝑛+1
1𝑛+1 dove 𝑦 è una variabile, 𝑛 è la potenza della distribuzione,
𝑥0 e 𝑥1 definiscono il range della distribuzione.
TLWMobilityModelUI: interfaccia che estende l'interfaccia GeneratorUI.
TLWMobilityModelUIImpl: implementa l'interfaccia TLW
MobilityModelUI e serve gestire l'interfaccia grafica di configurazione del
modello di mobilità.
TLWMobilityModelPanel: implementa l'interfaccia grafica del pannello di
configurazione dei parametri (velocità minima e massima, tempo di pausa,
numero di'iterazioni, …), che vengono passati alle variabili del modello di
mobilità.

76
Fig.4.6: Viene mostrato il Class diagram delle principali classi che costituiscono il
Random Waypoint Mobility Model Generator. Per rendere il grafico leggibile non
vengono mostrate le variabili ed i metodi delle classi.
4.5 Indicatori statistici/Metriche
Nei seguenti paragrafi verrà illustrato come gli indicatori statistici/metriche (descritti
in 3.3) sono stati implementati nella piattaforma Gephi. I plugin che verranno visti,
sono stati tutti sviluppati seguendo la guida "How to write a metric " [29].
4.5.1 Weighted Clustering Coefficient e Strength
Viene calcolato per ogni nodo, il Weighted Clustering Coefficient e la strength (descritte
entrambe in 3.3.1). Di entrambi viene calcolata la distribuzione, mentre solo per il
Weighted Clustering Coefficient viene calcolato anche il valore medio. Le classi principali
sono:
WeightedClusterCoefficient: calcola per ciascun nodo il Weighted
Clustering Coefficient e la strength . Questi vengono salvati rispettivamente

77
in due SortedMap, cc_distribution e strength _distribution. La prima ha per chiave il
valore del Weighted Clustering Coefficient calcolato e per valore il numero di
nodi con tale valore. La seconda hash map ha per chiavi i valori della strength
e per valore il numero di nodi con tale valore. Viene utilizzata una terza hash
map per calcolare la distribuzione cumulativa della strength, definita come:
𝐹 𝑆𝑡𝑟𝑒𝑛𝑔𝑡 = 𝑓𝑟𝑎𝑧𝑖𝑜𝑛𝑒 𝑑𝑖 𝑛𝑜𝑑𝑖 𝑐𝑜𝑛 𝑆𝑡𝑟𝑒𝑛𝑔𝑡
𝑀𝑎𝑥𝑆𝑡𝑟𝑒𝑛𝑔𝑡 ≥ 𝑆𝑡𝑟𝑒𝑛𝑔𝑡;
utilizzando la libreria JFreeChart (http://www.jfree.org/jfreechart/) e la classe
ChartUtils (implementata per ottimizzare la visualizzazione dei grafici)
abbiamo costruito i grafici di tali distribuzioni.
WeightedClusterCoefficientBuilder: che implementa StatisticsBuilder,
regista la nuova metrica nella piattaforma Gephi.
WeightedClusterCoefficientUI: implementa l'interfaccia StatisticsUI. E' la
classe che fornisce i parametri, definiti nel pannello di configurazione,
all'istanza della statistica. Definisce anche il nome, categoria e posizione della
statistica nella GUI di scelta di Gephi
weightedClusterCoefficientPanel: implementa l'interfaccia grafica del
pannello di configurazione del parametro, che permette di scegliere la
tipologia di grafo (diretto o non diretto). Il valore viene passato alla variabile
isDirected della classe WeightedClusterCoefficient.
4.5.2 Flooding time
Simula il protocollo di flooding (descritto in 3.3.2), utilizzando la struttura dati ed i metodi
offerti dal DNF Dynamic (illustrato in 4.2), calcola la distribuzione tempo discreta,
che mostra come in media si propaga un informazione nella rete dinamica. Il plugin
è costituito dalle seguenti classi (mostrate in figura 4.7):
DnfFloodingTime: Dopo aver istanziato la struttura dati, che rappresenta il
grafico dinamico dei contatti, calcola il protocollo di flooding per il numero di
volte definito dalla variabile total_number_of_iteration. I risultati di ciascuna
iterazione vengono salvati in una SortedMap, Mean_Time_to_spread, che ha
come chiave il tempo in cui viene calcolata la diffusione del messaggio e
come valore un array contenente il numero di nodi infetti per ciascuna
iterazione. Grazie a questa struttura dati si possono generare, utilizzando la

78
libreria JFreeChart (http://www.jfree.org/jfreechart/) e la classe ChartUtils
(sviluppata per ottimizzare la visualizzazione dei grafici), un grafico che
mostra come varia nel tempo il numero medio di nodi che hanno ricevuto
l'informazione.
DnfFloodingTimeBuilder: che implementa StatisticsBuilder, regista la
nuova metrica nella piattaforma Gephi.
DnfFloodingTimeUI: implementa l'interfaccia StatisticsUI. E' la classe che
deve passare i parametri, definiti nel pannello di configurazione, all'istanza
della statistica. Stabilisce anche il nome, categoria e posizione della statistica
nella GUI di scelta di Gephi
DnfFloodingTimePanel: implementa l'interfaccia grafica del pannello di
configurazione. Tale pannello permette di scegliere quante volte iterare
l'algoritmo. Il valore viene passato alla variabile total_number_of_iteration della
classe DnfFloodingTime.
Fig.4.7: Viene mostrato il Class diagram delle principali classi che costituiscono il

79
plugin DNF Flooding Time. Viene mostrata solo la gerarchia delle classi omettendo
la definizione delle variabili e dei metodi.
4.5.3 Inter-contact time ed Intra-contact time
Questo plugin calcola e grafica la Inter ed Intra contact time distribution (definite in 3.3.2)
in tempi significativamente rapidi, grazie alla struttura dati costruita dal modulo DNF
Dynamic. Le principali classi sono:
Dnf_Inter_Intra_contactTime: La classe utilizza le seguenti strutture dati:
l'ArrayList arr_durate memorizza le durate di tutti i contatti in modo da
calcolarne facilmente la media; l'ArrayList arr_durate_interval memorizza le
durate di tutti gli intervalli di tempo che intercorrono tra il contatto di due
stessi nodi, in modo da calcolarne la media; una SortedMap duration_to_count,
che ha per chiave la durata di un contatto e per valore il numero di contatti
che hanno avuto tale durata; una SortedMap interval_duration_to_count, cha ha
per chiave il tempo dopo il quale due stessi nodi hanno un contatto e per
valore il numero di intervalli con tale durata; due SortedMap per calcolare la
distribuzione cumulativa di entrambe le grandezze, definita come:
𝐹 𝑑𝑢𝑟𝑎𝑡𝑎 = 𝑓𝑟𝑎𝑧𝑖𝑜𝑛𝑒 𝑑𝑖 𝑛𝑜𝑑𝑖 𝑐𝑜𝑛 𝐷𝑢𝑟𝑎𝑡𝑎
𝑀𝑎𝑥𝐷𝑢𝑟𝑎𝑡𝑎 ≥ 𝑑𝑢𝑟𝑎𝑡𝑎; uilizzando la
libreria JFreeChart (http://www.jfree.org/jfreechart/) e la classe ChartUtils (che
ottimizza la visualizzazione dei grafici) vengono costruiti i grafici di tali
distribuzioni.
Dnf_Inter_Intra_contactTimeBuilder: che implementa StatisticsBuilder,
regista la nuova metrica nella piattaforma Gephi.
Dnf_Inter_Intra_contactTimeUI: implementa l'interfaccia StatisticsUI. E'
la classe che, chiuso il pannello grafico, istanzia la statistica. Specifica anche il
nome, categoria e posizione della statistica nella GUI di scelta di Gephi
Dnf_Inter_intra_contactTimePanel: implementa l'interfaccia grafica, che
mostra la definizione della metrica.

80
4.5.4 Conditional probability Distribution of link's existence
Per calcolare le due distribuzioni di probabilità condizionata (descritte in
3.3.2), che variano al crescere rispettivamente dei rapporti 𝑃𝑒 ,1
𝑃𝑒 e
𝑃𝑒 ,0𝑃𝑒
, sono
state implementate le seguenti classi:
DnfConditionalProbabilityDistribution: nella classe sono utilizzate le
seguenti strutture dati: l'ArrayList arr_P_1To1 per calcolare la probabilità
congiunta 𝑃𝑒 ,1; l'ArrayList arr_P_1To0 per calcolare la probabilità congiunta
𝑃𝑒 ,0; due SortedMap, probability_distribution_1 e probability_distribution_0, per
calcolare per ciascun arco 𝑒 rispettivamente i rapporti, 𝑃𝑒 ,1
𝑃𝑒 e
𝑃𝑒 ,0𝑃𝑒
; due
SortedMap per calcolare la distribuzione cumulativa di entrambe le
grandezze. Le probabilità congiunte sono state calcolate utilizzando i metodi
forniti dal modulo DNF Dynamic, che permettono di conoscere in tempi
rapidi i presence schedule degli archi. Inoltre, tramite la libreria JFreeChart
(http://www.jfree.org/jfreechart/) e la classe per configurare i grafici, ChartUtils,
vengono costruiti i grafici delle due distribuzioni cumulative.
DnfConditionalProbabilityDistributionBuilder:
che implementa StatisticsBuilder, regista la nuova metrica nella piattaforma
Gephi.
DnfConditionalProbabilityDistributionUI: implementa l'interfaccia
StatisticsUI. E' la classe che istanzia la metrica e definisce nome, categoria,
posizione della statistica nella GUI di scelta di Gephi
4.5.5 Link's existence variability
Come abbiamo detto in 3.3.2, si ha bisogno di analizzare l'andamento medio della
probabilità 𝑃𝑒 , ∀𝑒 ∈ 𝐸, nelle varie epoche, in modo da verificare se 𝑃𝑒 ha o meno un
andamento stazionario. E' stata, dunque, implementata un plugin che utilizza il
modulo DNF Dynamic, le cui classi principali sono le seguenti:
DnfLinkExistenceVariability: vengono usate le seguenti strutture dati: una
SortedMap EpochToProb, che ha come chiave l'epoca e come valore la
rispettiva probabilità di occorrenza di un arco; una SortedMap

81
Mean_Epoch_to_Probs, che ha come chiave l'epoca e come valore un array
contenente la probabilità di esistenza di ciascun arco del grafo; un HashMap
indicies, che mappa gli archi a id diversi, da quelli assegnati in automatico da
Gephi; l'ArrayList di archi randomEdges, contiene l'insieme di venti archi scelti
in modo casuale (se scelto in fase di configurazione). In base alla scelta fatta
dall'utente nel pannello di configurazione (calcolo per ogni 𝑒 ∈ 𝐸, oppure per
l'arco più frequente, oppure per un campione di venti archi scelti
casualmente), viene costruito un grafico, che mostra l'andamento medio della
probabilità di occorrenza dei contatti nelle varie epoche. Questo grafico è
stato generato usando la libreria JFreeChart (http://www.jfree.org/jfreechart/) e la
classe per configurare i grafici, ChartUtils.
DnfLinkExistenceVariabilityBuilder: regisrta la statistica nella piattaforma
Gephi.
DnfLinkExistenceVariabilityUI: E' la classe che deve passare i parametri,
definiti nel pannello di configurazione, all'istanza della statistica. Inoltre
definisce nome, categoria, posizione della statistica nella GUI di scelta di
Gephi.
DnfLinkExistenceVariabilityPanel: implementa l'interfaccia grafica del
pannello di configurazione. Questo pannello permette di scegliere la
dimensione dell'epoca e scegliere su quali archi eseguire il calcolo: per ogni
𝑒 ∈ 𝐸, oppure per l'arco più frequente, oppure per un campione di venti
archi scelti casualmente. Questi valori verranno passati alla classe che
implementa la metrica, ossia DnfLinkExistenceVariability.
4.5.6 Pearson correlation matrix
Al fine di calcolare le Pearson correlation matrix (3.3.1) degli archi appartenenti
alle community di nodi, classificate secondo la modularity, oltre alla piattaforma Gephi,
viene utilizzato R (http://www.r-project.org/), un linguaggio e un ambiente per calcolare
e graficare statistiche. Il plugin genera per ogni matrice 10 × 10 un file CSV
(Comma Separated Value, di cui è possibile vedere un esempio nel listato 4.1), dove
ciascuna riga contiene i pearson coefficient (separati da virgola) delle rispettive coppie di
archi.

82
Se non esiste, viene creata una sottocartella nella directory principale dei
plugin, chiamata PearsonCorrelationFile, dove vengono generati i file CSV delle matrici,
uno script R, che esegue il plot delle matrici di correlazione, e una sotto-directory Img
che conterrà tali plot. Terminato il calcolo della metrica, lo script R andrà eseguito
nel suo ambiente, in modo da ottenere i grafici. Per un corretto utilizzo della metrica
viene precisato che, ogni volta che viene eseguita, il contenuto della directory
PearsonCorrelationFile viene cancellato, pertanto si consiglia vivamente di copiarlo in
un'altra cartella se si ha bisogno di tenere memoria dei risultati ottenuti.
Le principali classi che costituiscono il plugin sono:
DnfPearsonCorrelationMatrix: classe che implementa la metrica. Utilizza le
seguenti strutture dati: due array, presenceSchedule_1 e presenceSchedule_2, che
contengono i presence schedule (calcolati con il modulo DNF Dynamic) delle
coppie di archi per cui viene calcolato il Pearson correlation coefficient; la matrice
PearsonCorrelationMatrix, che memorizza la matrice di correlazione di ciascuna
community, individuata tramite modularity; Una HashMap community_nodes,
che ha per chiave l'id della community e per valore la lista degli id dei nodi
che vi appartengono; una HashMap edges_indicies, che ha per chiave un
oggetto di tipo arco e come valore il suo id associato, in modo da popolare la
matrice di correlazione; una SortedMap matrixID_edgeID, che ha per chiave
e per valore l'id degli archi che fanno parte della matrice, in modo da avere
una corrispondenza tra gli id degli archi e il nome delle colonne della matrice.
L'HashMap community_nodes è stata popolata classificando i nodi tramite
Modularity, metrica statica già implementata in Gephi, che viene richiamata e
configurata come mostrato nel listato 4.2.
PearsonCorrelation: classe statica che fornisce un metodo chiamato
getPearsonCorrelation. Questo metodo riceve come parametro due insiemi di
numeri, rappresentati da due array di tipo double e restituisce il corrispettivo
coefficiente di Pearson.
DnfPearsonCorrelationMatrixBuilder: regista la metrica nella piattaforma
Gephi.
DnfPearsonCorrelationMatrixUI: definisce nome, categoria, posizione
della statistica nella GUI di scelta di Gephi ed istanzia la classe che
implementa la metrica, ossia DnfPearsonCorrelationMatrix.

83
"1435","1157","1144","108"
"1435",1.0000000000000002,-0.004644311277613875,-0.004664103902419727,-0.004238661614100853
"1157",-0.004644311277613875,1.0000000000000002,0.024809329925701857,-0.00552389267393271
"1144",-0.004664103902419727,0.024809329925701857,1.0000000000000002,-0.005547433803850121
"108",-0.004238661614100853,-0.00552389267393271,-0.005547433803850121,1.0,-0.005862655269643211
Listato 4.1 Mostra un estratto di una matrice di correlazione in formato csv.
Modularity mod = new Modularity();
mod.setRandom(true);
mod.setUseWeight(true);
mod.setResolution(1.0);
mod.execute(graphModel, attributeModel);
Listato 4.2 Mostra un pezzo di codice estratto dalla classe DnfPearsonCorrelationMatrix, dove viene istanziata e configurata la metrica statica Modularity. Passando alla metrica il valore true al parametro random e il valore 1.0 al parametro resolution, si ottiene la massima precisione possibile nel classificare i nodi del grafo.
4.6 Ulteriori script e riferimenti
Dato che Gephi non permette di graficare i risultati di una singola metrica calcolata
su grafi differenti, oltre ai moduli software che sono stati descritti nei precedenti
paragrafi, è stato implementato un semplice script ausiliario detto MultipleChart, che
offre la possibilità di graficare in un unico time series chart più dataset.
Tramite riga di comando è possibile decidere il tipo di grafico che si vuole ottenere
(esiste un tipo per ogni metrica che è stata implementata), la scala (normale o
logaritmica a base 10), ed i file da cui estrarre i valori da graficare (che sono generati e
salvati automaticamente ogni volta che si esegue una metrica in Gephi, nella cartella
principale dei plugin chiamata savedata). Utilizzando le classi fornite dalla libreria
JFreeChart (http://www.jfree.org/jfreechart/) vengono generati i grafici che possono
essere ridimensionati e successivamente salvati.
Per chi fosse interessato, tutto il materiale sviluppato e descritto in questo capitolo è
disponibile su richiesta, scrivendo al seguente indirizzo mail: [email protected]

84
Capitolo 5
Validazione sperimentale
dei modelli di mobilità
In questo capitolo verra illustrata l'analisi che condotta al fine di verificare
quanto i dati generati dai modelli di mobilità siano vicini o lontani dai dati ottenuti da
due esperimenti che abbiamo compiuto in contesti reali.
In questi esperimenti (illustrati nel paragrafo 1.2), chiamati SocialDIS e
NeonMACRO, sono stati collezionati attraverso una piattaforma RFID-based i
contatti di prossimità avvenuti tra le persone che hanno partecipato. I dataset sintetici
sono stati generati a partire dai modelli di mobilità Random Waypoint (RWP) e
Truncated Lévy Walk (TLW). Tali modelli sono stati scelti scartando gli altri per i
seguenti motivi:
1. Nel paragrafo 2.1.1 si osserva che il Random Walk Mobility Model si basa sul
moto browniano, dunque genera user trace poco realistiche, dove il
movimento degli individui è dettato solo dal caso.
2. Il Random Waypoint Mobility Model è quello più usato per generare schemi di
mobilità realistici per individui che si muovono in particolari contesti, come
ad esempio, conferenze o visite ad un museo [13]. Pertanto risulta
ragionevole adottarlo.
3. Il Random Direction Mobility Model non è adatto perché, in tale modello, le
persone si fermano ed attendono un determinato tempo prima di ripartire,
solo ai confini dell'area di simulazione. La versione modificata (illustrata nel
paragrafo 2.1.3) che evita questo difetto, se considera anche il tempo di
pausa, è identica al Random Waypoint Mobility Model, dunque è stato deciso di
scartare il suo utilizzo.
4. Il Truncated Lévy Walk Mobility Model è stato adottato perché, come il RWP, è
uno dei modelli più utilizzati per simulare i movimenti di dispositivi mobili

85
in reti mobili ad hoc e perché le tracce di mobilità generate risultano essere
più realistiche di quelle ottenute dal modello RW.
5. Il Boudless Simulation Area Mobility Model non è adatto allo scopo perché, nei
casi reali che abbiamo tracciato, le persone non possono superare i confini
dell'area in cui si muovono attraversando in modo assolutamente irrealistico
le mura e riapparire nel punto opposto dell'area.
6. Il Gauss-Markov Mobility Model, se propriamente configurato, fornisce dei
pattern di mobilità realistici, ma ha lo stesso problema del Random Direction
Mobility Model che abbiamo definito più sopra.
7. Anche se la versione probabilistica del Random Walk Mobility Model fornisce
delle user trace che si avvicinano molto a quelle del mondo reale (come visto
in figura 2.7), risulta difficoltoso scegliere i giusti parametri per la matrice di
probabilità, perché per settarli si ha bisogno di informazioni di cui al
momento non disponiamo.
8. Il Weighted Waypoint Mobility Model è una versione del RWP che genera tracce
di mobilità tipicamente più accurate, le quali tengono conto del fatto che le
persone non scelgono in modo casuale dove dirigersi. I nodi mobili
decidono dove andare tramite una matrice di probabilità tempo variante [64].
Come per la versione probabilistica del modello RW, risulta difficile
assegnare le giuste probabilità a tale matrice, in quanto bisogna conoscere ed
analizzare in modo approfondito delle user trace molto più dettagliate,
rispetto a quelle ottenute dai casi reali che sono stati studiati.
Nei due paragrafi di questo capitolo verranno illustrate le seguenti analisi:
Si confronteranno statisticamente le tracce di contatti collezionate a partire
dagli esperimenti SocialDIS e NeonMACRO, con quelle ottenute a partire dai
modelli di mobilità nella loro versione originale;
Si analizzerà il comportamento dei due modelli, nel caso in cui venga
aumentata, di uno specifico fattore, la dimensione dell'area di simulazione;

86
5.1 Comparazione con i dati dell'esperimento SocialDIS
5.1.1 Modelli nella loro formulazione originaria
L'esperimento SocialDIS si è svolto in un'area rettangolare di circa 90𝑚 𝑥 30𝑚,
dove, per circa quattro giorni, sono state catturate le tracce dei contatti di 116
studenti. Come si può osservare dalla figura 1.2, i lettori RFID sono stati distribuiti
nelle aule, nella segreteria, nella sala studio, nella presidenza, nel dispaccio (stanza
dove vengono venduti cibi e bevande agli studenti), ma non sono stati installati nel
cortile, situato nella zona centrale del primo piano dell'edificio. Dunque, l'area dove
vengono registrate le interazioni tra studenti assume una forma a "ferro di cavallo".
Quest'area, per essere compatibile con i parametri 𝑋𝑚𝑎𝑥 e 𝑌𝑚𝑎𝑥 , da fornire ai
modelli di mobilità, è stata approssimata ad un rettangolo di circa 133𝑚 𝑥 11𝑚. Per
tentare di simulare le interazioni avvenute in SocialDIS, nei modelli di mobilità sono
stati usati 116 nodi con un raggio di visibilità di 1𝑚, disposti in un'area rettangolare
di 133𝑚 𝑥 11𝑚 ed sono stati configurati i parametri di lunghezza dei percorsi,
velocità dei nodi e tempo di pausa, per produrre dataset che possano avere delle
caratteristiche simili a quelle dello specifico scenario considerato. Per il RW model
viene assegnata ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s.
Per il TLW model, le flight lengths (𝑙) e i waiting times (𝑡) seguono le
truncated power laws 𝑝 𝑙 ~ 𝑙 − 1+𝛼 , 𝑙 < 𝑙𝑚𝑎𝑥 e 𝜓 𝑡 ~𝑡− 1+𝛽 , 0 < 𝑡 < 𝑡𝑚𝑎𝑥 , con
𝛼 = 0.8, 𝛽 = 0.3, 𝑙𝑚𝑎𝑥 = 133, 𝑡𝑚𝑎𝑥 = 3600𝑠 (1), con angoli di rotazione presi
da una distribuzione uniforme e velocità dei nodi proporzionale alle flight lengths.
Per entrambi i modelli simulazione viene è stata fatta durare 42200𝑠 (12), ossia
per la massima quantità di tempo che uno studente può trascorrere in facoltà durante
una singola giornata.
Allo stesso modo, sono stati considerati solamente i primi 42200𝑠 (12)
dell'evoluzione del Contact Graph generato nell'esperimento SocialDIS. Durante
l'importazione di questo grafo, la soglia entro la quale una disconnessione non viene
considerata come interruzione del contatto (parametro configurabile nel DNF
Importer) è stata fissata a tre. Nelle tabelle 5.1.1-1 e 5.1.1-2 vengono mostrate le
statistiche calcolate sui tre grafi aggregati che non considerano i Presence schedules
associati a ciascun nodo/arco e dove il peso di ciascun arco è pari alla sua frequenza.

87
Da essi si nota che nei dataset sintetici si presentano un numero maggiore di
interazioni tra individui distinti rispetto allo specifico caso reale e che i Contact Graph,
generati secondo i modelli RWP e TLW, sono significativamente densi e coesi. In
figura 5.1.1.1, comparando le Strength distribution dei due dataset sintetici con quella
del dataset SocialDIS, si osserva che non si presentano somiglianze: la strength dei
nodi, che si muovono secondo i modelli di mobilità, è maggiore perché essi
interagiscono mediamente con un numero superiore di vicini.
Dataset # Edges Average
degree
Average
strength
Graph
density
SocialDIS 171 3,28 0,008 0,03
TLW 5.405 93,19 0,952 0,81
RWP 6.617 114 0,919 0,99
Tabella 5.1.1-1: Vengono mostrati: il numero di archi, il degree medio, il degree
medio pesato (o strength ) e la densità del grafo. SocialDIS è il dataset ottenuto
dall'esperimento sociale reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint Mobility Model e il Truncated Lévy Walk
Mobility Model.
Dataset Average Clustering
Coefficient
Average Weighted
Clustering Coefficient
SocialDIS 0,435 0,297
TLW 0,861 0,867
RWP 0,992 0,992
Tabella 5.1.1-2: Cluster coefficient medio (pesato e non pesato), calcolato su tre
dataset: SocialDIS è il dataset ottenuto dall'esperimento sociale reale, mentre TLW ed
RWP sono synthetic dataset generati rispettivamente simulando il Random Waypoint e
il Truncated Lévy Walk models.

88
Fig. 5.1.1.1: Node Strength distribution con F(Strength) = frazione di nodi con
(Strength/Max Strength) >= Strength. Comparazione della distribuzione di tre
dataset, uno collezionato nell'esperimento SocialDIS e due generati dai modelli di
mobilità, entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 0.8, 𝛽 = 0.3.
Pertanto risulta evidente che i due modelli di mobilità falliscono nel riprodurre le
proprietà strutturali del grafo dinamico dei contatti in forma aggregata. Vengono
analizzate ora le proprietà temporali delle interazioni sociali. Ogni contatto che
avviene tra due individui è caratterizzato dalla sua durata (detta Intra Contact Time) e
da quanto tempo trascorre prima che esso riaccada (detto Inter Contact Time).
Nelle figure 5.1.1.2 e 5.1.1.3 vengono comparate rispettivamente la Inter
Contact Time distribution e la Intra Contact Time distribution, calcolate sui i dati raccolti
durante l'esperimento SocialDIS e su quelli ottenuti a partire dai modelli di mobilità
RWP e TLW. La Intra Contact Time distribution e la Inter Contact Time distribution, in tutti
e tre i casi, ha, come ci si aspettava, un andamento di tipo power law.
Dalla figura 5.1.1.2, si nota che l'Inter contact time distribution del SocialDIS ha
un andamento e una forma simile a quella relativa al modello RWP, presentando però

89
valori totalmente differenti e un andamento diverso rispetto alla distribuzione relativa
al modello TLW.
Fig. 5.1.1.2: Comparazione dell' Inter Contact Time distribution di tre dataset, uno
collezionato nell'esperimento SocialDIS e due generati dai modelli di mobilità,
entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model abbiamo
assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il TLW
model, le flight lengths e i pause times seguono le truncated power laws con 𝛼 = 0.8,
𝛽 = 0.3.
In figura 5.1.1.3 viene mostrato che la Intra contact time distribution del
SocialDIS ha un andamento simile a quella del modello RWP, mentre è discordante
rispetto a quella del modello TLW. Questi due fatti vengono suffragati dai dati
mostrati nella tabella 5.1.1-3, dove si vede che entrambi i modelli di mobilità, rispetto
ai dati del SocialDIS, presentano un numero elevato di contatti mediamente di lunga
durata e un numero minore di intervalli mediamente di maggiore durata, dunque ci si
accorge che i contatti tra individui sono frequenti, ma che lo stesso contatto tra due
individui si ripresenta sporadicamente.

90
Tali modelli non considerano un comportamento tipico degli studenti,
ovvero che essi tendono a ricomunicare frequentemente con i propri amici e a
comunicare di rado con studenti che non conoscono.
Dataset Average Intra-
contact Time
(seconds)
Average Inter-
contact Time
(seconds)
# Contact # Interval
SocialDIS 3,0 129,9 5.345 3.758
TLW 42,2 1.731,4 55.213 1.347
RWP 68,9 6.804,9 32.600 474
Tabella 5.1.1-3: La tabella mostra la durata media di un contatto tra due nodi e
dell'intervallo di tempo che intercorre tra due successivi contatti tra gli stessi nodi, il
numero di contatti e il numero di intervalli. SocialDIS è il dataset ottenuto
dall'esperimento sociale reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint e il Truncated Lévy Walk Model.
Fig. 5.1.1.3: Comparazione dell' Intra Contact Time distribution di tre dataset, uno
collezionato nell'esperimento SocialDIS e due generati dai modelli di mobilità,
entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model abbiamo

91
assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il TLW
model, le flight lengths e i pause times seguono le truncated power laws con 𝛼 = 0.8,
𝛽 = 0.3.
Utilizzando reti dinamiche di contatti, come quella ottenuta dall'esperimento
SocialDIS, e quelle fornite dai modelli di mobilità RWP e TLW, è possibile simulare
il processo di diffusione di un'informazione. E' stato simulato tale processo diffusivo
calcolando la metrica Flooding time (definita in 3.3.2), in modo da scoprire che ruolo
assume la topologia dinamica della rete sulla diffusione di un'informazione.
In figura 5.1.1.4 viene mostrato l'andamento medio di 20 esecuzioni di questa
metrica nel caso SocialDIS considerando tutta la durata dell'esperimento, ossia circa
370000 𝑠 (4 𝑔𝑖𝑜𝑟𝑛𝑖). Si osservano delle rapide di diffusioni del messaggio dopo
circa 22000 secondi (che corrispondono alle 15:30 del giorno 17/10/2011), dopo
circa 99000 secondi (che corrispondono alle 12:55 del giorno 18/10/2011) e dopo
circa 180000 secondi, (che corrispondono alle 11:25 del giorno 19/10/2011).
Fig. 5.1.1.4: Distribuzione tempo discreta che mostra come in media si propaga un
informazione nella rete dinamica di contatti ottenuta dall'esperimento SocialDIS.

92
Pertanto, sembrerebbe che questi siano gli orari in cui le interazioni tra
studenti risultano più probabili. Successivamente è stato calcolato il flooding time per le
reti di contatti dinamiche ottenute dai modelli di mobilità. A causa dell'elevato
numero di interazioni che avvengono in tali modelli, risulta chiaro dalla figura 5.1.1.5
e dallo studio condotto in [26], che i due modelli falliscono nel rappresentare il
comportamento diffusivo del caso reale.
Fig. 5.1.1.5: Comparazione della Flooding time distribution di tre dataset, uno
collezionato nell'esperimento SocialDIS e due generati a partire dai modelli di
mobilità, entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 0.8, 𝛽 = 0.3.
Riscontrato che i modelli di mobilità non sono stati efficaci nel simulare
realisticamente il fenomeno diffusivo accaduto in SocialDIS, viene verificato invece
se esistono delle correlazioni statistiche tra i contatti tracciati a partire dal caso reale e
quelli ottenuti a partire i modelli di mobilità. L'andamento delle Conditional probability

93
Distribution of link's existence (definite nel paragrafo 3.3.2), illustrate nelle figure 5.1.1.6
e 5.1.1.7, mostra il fatto che esiste una leggera similarità tra l'andamento della
distribuzione del SocialDIS e quello della distribuzione del modello RW, per quanto
concerne la probabilità condizionata 𝑃𝑒 ,1, ossia la probabilità che un contatto,
rappresentato dall'arco 𝑒, esista in un determinato tempo, sapendo che è esistito al
tempo immediatamente precedente.
Osservando l'andamento delle due Conditional probability Distribution of link's
existence nel caso SocialDIS, si scopre che se un determinato contatto avviene al
tempo 𝑡 − 1 con alta probabilità lo stesso contatto avverrà al tempo 𝑡, mentre se il
contatto non avviene al tempo 𝑡 − 1 con alta probabilità questo non si ripeterà al
tempo 𝑡.
Questo risultato induce a pensare che potrebbe esistere una dipendenza
temporale che ha caratteristiche di tipo markoviano.
Fig. 5.1.1.6: Conditional Probability distribution dove F(𝑥) = percentuale di archi con
𝑃𝑒,0/Pe ≥ x. Comparazione della Conditional Probability distribution di tre dataset,
uno collezionato nell'esperimento SocialDIS e due generati dai modelli di mobilità,
entrambi con 116 nodi con un contact detection range di 1𝑚: Per il Random Waypoint
model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 1.0

94
m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times seguono le
truncated power laws con 𝛼 = 0.8, 𝛽 = 0.3.
Fig. 5.1.1.7: Conditional Probability Distribution dove dove F(𝑥) = percentuale di
archi con 𝑃𝑒 ,1/Pe ≥ x. Comparazione della Conditional Probability distribution di tre
dataset, uno collezionato nell'esperimento SocialDIS e due generati dai modelli di
mobilità, entrambi con 116 nodi con un contact detection range di 1𝑚: Per il Random
Waypoint model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01
e 0.8 m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times seguono le
truncated power laws con 𝛼 = 0.8, 𝛽 = 0.3.
Come ci si aspetta, sulla base dei risultati ottenuti nell'analisi dei contact time, in figura
5.1.1.6 si nota che entrambi i modelli di mobilità sottostimano la probabilità 𝑃𝑒 ,0, vale
a dire che se un contatto non avviene al tempo 𝑡 − 1 quasi certamente questo non si
ripeterà al tempo 𝑡.
Invece, in figura 5.1.1.7 si osserva che la probabilità 𝑃𝑒,1 viene sovrastimata
perché i mobility models presentano un maggiore numero di contatti, che hanno un
alta probabilità di esistere al tempo 𝑡 sapendo che sono esistiti anche al tempo 𝑡 − 1.
Questo risultato è concorde a quelli precedenti per il fatto che i modelli RWP e TLW
generano comunicazioni tra stessi individui che si ripresentano raramente e che

95
mediamente durano di più, rispetto a quelle generate nel caso SocialDIS. Pertanto il
presence schedule di un arco (o contatto) conterrà lunghi momenti in cui esso esiste,
seguiti da lunghi momenti in cui esso non esiste.
Fig. 5.1.1.8: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 2000 secondi. La distribuzione è stata calcolata su
tutti gli archi del grafo.
Nel calcolo della Conditional probability Distribution of link's existence, vengono stimate le
probabilità 𝑃𝑒 ,1 e 𝑃𝑒 ,0 supponendo che 𝑃𝑒 sia costante nel tempo. In realtà questa
probabilità non è detto che sia costante, dunque si vuole misurare la sua variabilità
nel tempo utilizzando la metrica Link's existence variability (definita nel paragrafo 3.3.2).

96
Fig. 5.1.1.9: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 2000 secondi. La distribuzione è stata calcolata
sull'arco più frequente del grafo.
Fig. 5.1.1.10: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 2000 secondi. La distribuzione è stata calcolata su un
sottoinsieme di 20 archi scelti casualmente.

97
Con questa metrica viene calcolata la probabilità 𝑃𝑒 ,𝑖 , con 𝑖 ∈ 1, … , 𝑁𝐸 (dove 𝑁𝐸
è il numero di epoche costituite ognuna da 2000 secondi), per ciascuno dei tre
dataset, prima per ogni arco 𝑒 (figura 5.1.1.8), poi per l'arco più frequente (figura
5.1.1.9) ed infine per un campione di venti archi scelti casualmente (figura 5.1.1.10).
Dalla figura 5.1.1.8 si nota che in media la probabilità che un arco esista o meno in
una determinata epoca costituita da 2000 secondi, calcolata su tutti gli archi del grafo,
risulta essere con buona approssimazione stazionaria.
Questo risultato mostra che la probabilità di esistenza di un arco non varia
molto nel tempo, rafforzando così la validità delle stime effettuate nelle Conditional
Probability Distribution. Si continua a indagare sulle dipendenze temporali che possono
esistere nelle comunicazioni tra persone, verificando se esiste o meno una
correlazione tra i contatti che avvengono tra coppie distinte d'individui, ossia se
l'esistenza di un contatto ad un determinato tempo 𝑡 sia correlata o meno
all'esistenza di uno o più contatti avvenuti nello stesso tempo.
Per effettuare tale verifica viene in aiuto la Pearson Correlation Matrix (definita
nel Capitolo 3). Da ogni community, classificata secondo la modularity, vengono
estrapolati i primi 10 archi con peso più alto (ovvero quelli più frequenti), per i quali
viene calcolata la matrice di correlazione. La modularity tende a classificare in grandi
community i nodi che hanno comunicato poco frequentemente con molti nodi, in
piccole community i nodi che hanno comunicato frequentemente con un numero
ristretto di nodi e in community di dimensione uno ciascun nodo isolato.
Nel grafo mostrato in figura 5.1.1.14, si osserva che nel caso SocialDIS
vengono generate tante piccole community, mentre nei grafi relativi ai modelli di
mobilità mostrati in figura 5.1.1.15, vengono generate poche community, di cui una
molto grande. In particolare, nel modello TLW i nodi vengono classificati in soli tre
gruppi, di cui uno li contiene quasi tutti.
Tale risultato è in linea con il fatto che, rispetto al contesto del SocialDIS, nei
modelli di mobilità si presentano un elevato numero di contatti tra tutti gli individui,
indipendentemente dal fatto che essi abbiano o meno un legame di amicizia. Nel
Contact Graph aggregato, creato a partire dal modello TLW, i nodi vengono classificati
in una community dalle dimensioni maggiori, rispetto al modello RWP, perché nel

98
modello TLW avvengono un maggior numero di contatti tra nodi che difficilmente si
reincontrano, dato che questi seguono traiettorie non dettate puramente dal caso.
Se si confrontano le matrici di correlazione di ciascun gruppo di nodi, mostrate nelle
figure 5.1.1.11, 5.1.1.12 e 5.1.1.13, ci si accorge che nel caso reale le correlazioni tra
contatti distinti sono minime, mentre nel caso simulato l'esistenza di un contatto in
un determinato tempo risulta essere correlata temporalmente a quella di altri contatti
avvenuti contemporaneamente.
Fig. 5.1.1.11: Vengono mostrate le matrici di correlazione aventi il maggior numero
di correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando
la Modularity sul grafo aggregato, ottenuto dal dataset SocialDIS. L'intensità del giallo
indica quanto l'esistenza di due archi (o contatti) è correlata nel tempo. Maggiore è
l'intensità, maggiore è la correlazione temporale tra i due archi.

99
Fig. 5.1.1.12: Vengono mostrate le matrici di correlazione aventi il maggior numero
di correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando
la Modularity sul grafo aggregato, ottenuto simulando il Random Waypoint model.
L'intensità del giallo indica quanto l'esistenza di due archi (o contatti) è correlata nel
tempo. Maggiore è l'intensità, maggiore è la correlazione temporale tra i due archi.
Nei dataset sintetici, collezionati a partire dai modelli di mobilità, la probabilità che
coppie di contatti avvengano nello stesso istante temporale è alta perché in ciascuna
community avvengono moltissimi contatti. Inoltre si nota che in tutti e tre i casi, le
community costituite da un minor numero di nodi presentano un numero maggiore
di correlazioni temporali tra contatti.

100
Fig. 5.1.1.13: Vengono mostrate le matrici di correlazione aventi il maggior numero
di correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando
la Modularity sul grafo aggregato, ottenuto simulando il Truncated Lévy Walk model.
L'intensità del giallo indica quanto l'esistenza di due archi (o contatti) è correlata nel
tempo. Maggiore è l'intensità, maggiore è la correlazione temporale tra i due archi.
Questo accade perché, come è stato già spiegato, nei cluster più piccoli sono presenti
i nodi che più frequentemente si sono re-incontrati.

101
Nella valutazione delle matrici di correlazione forse bisognerebbe tener conto
del fatto che nell'esperimento SocialDIS i reader RFID non sono stati collocati nelle
zone ricreative del primo piano del dipartimento, come il cortile o l'area dove si
trovano i distributori automatici di cibi e bevande. Inoltre il numero di partecipanti è
stato veramente esiguo e questo potrebbe mascherare quali siano stati i reali pattern
di comunicazione tra studenti.
Per tali motivi, forse si dovrebbero paragonare le matrici di correlazione,
dopo aver ricondotto l'esperimento in modo più robusto, permettendo così di
analizzare matrici di correlazioni più accurate.
Confrontando i risultati delle varie metriche, risulta chiaro che i mobility models
RWP e TLW, nella loro versione originale, producono tracce di contatti che
statisticamente non presentano somiglianze rispetto ai dati reali raccolti
nell'esperimento SocialDIS e che l'esistenza di ciascun contatto sembra presentare
delle dipendenze temporali che possono essere riconducibili a un processo stocastico
Markoviano.

102
Fig. 5.1.1.14: Mostra le community ottenute calcolando la Modularity sul grafo
aggregato dell'esperimento SocialDIS.
Fig. 5.1.1.15: Il grafo a sinistra mostra mostrate le community ottenute calcolando la
Modularity sul grafo aggregato ottenuto simulando il RW model, mentre il grafo a
destra mostra le community ottenute calcolando la Modularity sul grafo aggregato
ottenuto simulando il TLW model. I numeri sono gli identificativi delle community.
Il comportamento degli individui nel caso SocialDIS si discosta nettamente rispetto a
quello riprodotto dai due modelli di mobilità: gli studenti tipicamente spendono
grandi quantità di tempo in laboratori, in aule dedicate allo studio e in aule dove
seguono lezioni, entrano ed escono dalla facoltà in orari differenti, tendono a
comunicare più frequentemente con i loro amici e seguono dei percorsi dettati dagli
impegni che si sono programmati di assolvere durante la giornata. Nei modelli di
mobilità che sono stati usati, invece, le persone rimangono sempre nell'area di
simulazione, sporadicamente ricomunicano una seconda volta con la stessa persona e
seguono percorsi dettati dal caso (nel caso RWP) o che seguono una Lévy walk (nel
caso TLW).
Inoltre la validità del modello di mobilità TLW è stata verificata in ambienti
outdoor [20] come campus universitari, metropolitane e parchi naturali, dove le
persone si muovono in aree estese (nell'ordine del km), mentre nell'esperimento che
abbiamo condotto gli studenti si muovono in aree relativamente piccole e ricche di

103
ostacoli. Forse anche il modello RWP, come è stato visto dall'analisi temporale, tende
a generare una quantità di interazioni poco realistica se applicato ad aree esigue.
Alla luce di queste considerazioni, nei prossimi due sotto-paragrafi si analizzerà il
comportamento dei due modelli, nel caso in cui aumentiamo di un fattore 10 le
dimensioni dell'area di simulazione.
5.1.2 Modelli con aree di simulazione scalate di un fattore 10
L'efficacia del TLW Mobility Model, nel generare user trace statisticamente
realistiche, è stata collaudata confrontando le tracce di mobilità da essi generate con
quelle collezionate in esperimenti condotti in ambienti di tipo outdoor, dove le
persone si spostano ed interagiscono in luoghi estesi. Considerando aree di grandi
dimensioni, il TLW ed il RWP Mobility Model potrebbero forse simulare in modo
più accurato gli schemi di mobilità degli individui, mostrati nell'esperimento
SocialDIS, dove le interazioni tra studenti avvengono in aree relativamente ridotte.
Verrà analizzato ora se aumentare di un fattore 10 le dimensioni dell'area di
simulazione di entrambi i modelli, aumenti le similarità statistiche con i dati reali.
Nelle simulazioni vengono usati 116 nodi con un raggio di visibilità di 1𝑚, distribuiti
in un'area rettangolare di 1330𝑚 𝑥 110𝑚, e vengono configurati i parametri di
lunghezza dei percorsi, velocità dei nodi e tempo di pausa, con gli stessi valori
dell'analisi precedente.
Per il RW model viene assegnato ai nodi velocità uniformemente distribuite tra
0.01 e 0.8 m/s. Per il TLW model, le flight lengths (𝑙) e i waiting times (𝑡) seguono le
truncated power laws 𝑝 𝑙 ~ 𝑙 − 1+𝛼 , 𝑙 < 𝑙𝑚𝑎𝑥 e 𝜓 𝑡 ~𝑡− 1+𝛽 , 0 < 𝑡 < 𝑡𝑚𝑎𝑥 , con
𝛼 = 0.8, 𝛽 = 0.3, 𝑙𝑚𝑎𝑥 = 133, 𝑡𝑚𝑎𝑥 = 3600𝑠 (1) e la durata della simulazione è
sempre pari a 42200𝑠 (12). Nelle tabelle 5.1.2-1 e 5.1.2-2 si osserva che, rispetto
all'analisi precedente, le proprietà strutturali del Contact Graph in forma aggregata,
generato a partire dal modello TLW, tendono ad avvicinarsi a quelle del grafo dei
contatti aggregato relativo all'esperimento SocialDIS, mentre il grafo generato
modello RWP continua ad essere molto impreciso.
In particolare, il modello TLW è quello che presenta maggiori affinità per
quanto riguarda la frequenza media delle interazioni che un nodo mobile ha con i
propri vicini, mentre il modello RWP è quello che rappresenta meglio la formazione

104
dei cluster. Entrambi i modelli generano tracce di contatti aggregate molto più dense
del caso empirico.
Comparando le Strength distribution (mostrate in figura 5.1.2.1) dei due dataset
sintetici con quella del dataset empirico, si nota che l'andamento delle distribuzioni
relative ai due modelli di mobilità sono assolutamente diverse da quella relativa a
SocialDIS.
I modelli sono ancora ben lontani dal riprodurre fedelmente le proprietà strutturali
della Dynamic Contact Network aggregata del dataset empirico, ma si discostano da esse
in modo significativamente ridotto rispetto al caso precedentemente illustrato.
Dataset # Edges Average
degree
Average
strength
Graph
density
SocialDIS 171 3,28 0,008 0,03
TLW 476 10,27 0,007 0,08
RWP 1.600 27,58 0,010 0,24
Tabella 5.1.2-1: Vengono mostrati: il numero di archi, il degree medio, il degree
medio pesato (o strength ) e la densità del grafo. SocialDIS è il dataset ottenuto
dall'esperimento reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint Mobility Model e il Truncated Lévy Walk
Mobility Model, entrambi con l'area di simulazione scalata di un fattore 10.
Dataset Average Clustering
Coefficient
Average Weighted
Clustering Coefficient
SocialDIS 0,435 0,297
TLW 0,245 0,234
RWP 0,26 0,257
Tabella 5.1.2-2: Cluster coefficient medio (pesato e non pesato), calcolato su tre
dataset: SocialDIS è il dataset ottenuto dall'esperimento reale, mentre TLW ed RWP
sono synthetic dataset generati rispettivamente simulando il Random Waypoint e il
Truncated Lévy Walk models, entrambi con l'area di simulazione scalata di un fattore 10.

105
Fig. 5.1.2.1: Node Strength distribution con F(Strength) = frazione di nodi con
(Strength/Max Strength) >= Strength. Comparazione della distribuzione di tre
dataset, uno collezionato nell'esperimento SocialDIS e due generati dai modelli di
mobilità, entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 0.8, 𝛽 = 0.3.
Per quanto riguarda le proprietà temporali delle interazioni sociali, nelle figure 5.1.2.2
e 5.1.2.3 vengono comparate rispettivamente la Inter Contact Time distribution e la Intra
Contact Time distribution, tra il dataset SocialDIS e i due dataset sintetici.
Dagli andamenti delle due distribuzioni e dai valori contenuti nella tabella
5.1.2-3, si nota che ancora una volta i modelli di mobilità, rispetto al caso SocialDIS,
presentano un numero notevolmente inferiore di intervalli di comunicazione tra due
stessi nodi, che hanno mediamente una durata maggiore.
Dunque si osserva nuovamente che lo stesso contatto tra due persone si
ripresenta con minor frequenza nei modelli di mobilità.

106
Fig. 5.1.2.2: Comparazione dell' Inter Contact Time distribution di tre dataset, uno
collezionato nell'esperimento SocialDIS e due generati dai modelli di mobilità,
entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model abbiamo
assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il TLW
model, le flight lengths e i pause times seguono le truncated power laws con 𝛼 = 0.8,
𝛽 = 0.3.
Da questi risultati ci si accorge che, scalando l'area di simulazione di un fattore 10, in
entrambi i modelli di mobilità vengono generati un numero inferiore di contatti
rispetto alle tracce di contatti relative a SocialDIS e che le loro durate sono
mediamente inferiori rispetto al caso in cui gli individui vengono fatti muovere in
aree di simulazione non scalate.
Questo accade perché i nodi che si muovono secondo i mobility models,
muovendosi in aree più ampie, hanno meno probabilità d'incontrarsi e re-incontrarsi.
Pertanto aumentare le dimensioni dell'area di simulazione, sottostima le interazioni
avvenute tra gli studenti che hanno partecipato all'esperimento.

107
Fig. 5.1.2.3: Comparazione dell' Intra Contact Time distribution di tre dataset, uno
collezionato nell'esperimento SocialDIS e due generati dai modelli di mobilità,
entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model abbiamo
assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il TLW
model, le flight lengths e i pause times seguono le truncated power laws con 𝛼 = 0.8,
𝛽 = 0.3.
Dataset Average Intra-
contact Time
(seconds)
Average Inter-
contact Time
(seconds)
# Contact # Interval
SocialDIS 3,0 129,9 5.345 3.758
TLW 16,7 1.788,6 1.074 146
RWP 12,8 15.798,1 1.888 9
Tabella 5.1.2-3: La tabella mostra la durata media di un contatto (tra due nodi e
dell'intervallo di tempo che intercorre tra due successivi contatti tra gli stessi nodi), il
numero di contatti e il numero di intervalli. SocialDIS è il dataset ottenuto
dall'esperimento reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint e il Truncated Lévy Walk Model, entrambi
con l'area di simulazione scalata di un fattore 10.

108
In figura 5.1.2.4 vengono illustrati i risultati della metrica Flooding Time nel
caso in cui consideriamo le aree di simulazione maggiorate; esse mostrano l'incapacità
dei modelli nel rappresentare il comportamento diffusivo del caso reale.
Fig. 5.1.2.4: Comparazione della Flooding time distribution di tre dataset, uno
collezionato nell'esperimento SocialDIS e due generati a partire dai modelli di
mobilità, entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 0.8, 𝛽 = 0.3
In questo caso nel modello TLW l'informazione tende a propagarsi più lentamente
rispetto ai casi SocialDIS e RWP perché, come abbiamo visto dalle statistiche appena
descritte, i nodi hanno una minore probabilità di interagire. Nel modello TLW tali
nodi comunicano poco frequentemente perché muovendosi in aree ampie, tendono a
seguire percorsi molto più lineari rispetto al caso RWP (vedere le motivazioni nel
paragrafo 2.1.4). Questa analisi dimostra l'inadeguatezza dei modelli, forse dovuta al
fatto che essi non tengono conto della non casualità dei percorsi che gli studenti
seguono.

109
Viene valutato ora l'effetto che si ha per quanto concerne le Conditional probability
Distribution of link's existence. Osservando le figure 5.1.2.5 e 5.1.2.6 ci si accorge, come
ci si aspettava sulla base dei risultati ottenuti nell'analisi dei contact time che, entrambi i
modelli di mobilità sottostimano sia la probabilità 𝑃𝑒 ,0 che la probabilità 𝑃𝑒 ,1, vale a
dire che se un contatto non avviene al tempo 𝑡 − 1 quasi certamente questo non si
ripresenterà al tempo 𝑡 e che se un contatto avviene al tempo 𝑡 − 1 quasi certamente
questo non avrà luogo al tempo 𝑡.
Fig. 5.1.2.5: Conditional Probability distribution dove F(𝑥) = frazione di archi con
𝑃𝑒,0/Pe ≥ x. Comparazione della Conditional Probability distribution di tre dataset,
uno collezionato nell'esperimento SocialDIS e due generati dai modelli di mobilità,
entrambi con 116 nodi con un contact detection range di 1𝑚: Per il Random Waypoint
model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 1.0
m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times seguono le
truncated power laws con 𝛼 = 0.8, 𝛽 = 0.3
La probabilità 𝑃𝑒 ,1 viene questa volta sottostimata perché i mobility models
presentano un minore numero di contatti che hanno un'alta probabilità di esistere al
tempo 𝑡 sapendo che sono esistiti anche al tempo 𝑡 − 1. Questo risultato è in liena
con l'analisi dei contact time per il fatto che i modelli RWP e TLW generano un

110
numero inferiore di comunicazioni che si ripresentano sporadicamente tra stessi
individui, rispetto a quelle generate nell'esperimento SocialDIS.
Fig. 5.1.2.6: Conditional Probability Distribution dove F(𝑥) = frazione di archi con
𝑃𝑒,1/Pe ≥ x. Comparazione della Conditional Probability distribution di tre dataset,
uno collezionato nell'esperimento SocialDIS e due generati dai modelli di mobilità,
entrambi con 116 nodi con un contact detection range di 1𝑚: Per il Random
Waypoint model abbiamo assegnato ai nodi velocità uniformemente distribuite tra
0.01 e 0.8 m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times
seguono le truncated power laws con 𝛼 = 0.8, 𝛽 = 0.3.
Anche in questo caso l'esistenza di ciascun contatto nel tempo sembra presentare
delle dipendenze con caratteristiche markoviane, poichè la probabilità di esistenza di
uno specifico contatto a uno specifico tempo sembra dipendere dalla probabilità che
questo sia avvenuto al tempo immediatamente precedente. Nelle figure 5.1.2.7 e
5.1.2.8 viene mostrata la Link's existence variability, sia calcolata per ogni arco 𝑒 che per
un campione di venti archi scelti casualmente. Tale metrica calcolata per ciascuno dei
tre dataset, mostra come varia nel tempo la probabilità 𝑃𝑒,𝑖 , con 𝑖 ∈ 1, … , 𝑁𝐸 ,
dove 𝑁𝐸 è il numero di epoche costituite ognuna da 2000 secondi.

111
Fig. 5.1.2.7: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 2000 secondi. La distribuzione è stata calcolata su
tutti gli archi del grafo.
Fig. 5.1.2.8: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 2000 secondi. La distribuzione è stata calcolata su un
sottoinsieme di 20 archi scelti casualmente.
Dalla figura 5.1.2.7 si nota che, per quanto riguarda i modelli di mobilità, la
distribuzione della probabilità che un arco esista o meno in una determinata epoca

112
costituita da 2000 secondi, calcolata su tutti gli archi del grafo, risulta essere
approssimativamente stazionaria. Pertanto, anche in questo caso, la probabilità di
esistenza di un arco varia molto poco nel tempo, rafforzando la validità della stima
calcolata nelle Conditional Probability Distribution.
Come fatto nella precedente analisi (paragrafo 5.1.1), viene verificato se esiste
o meno una correlazione tra i contatti che avvengono tra coppie distinte di persone,
ossia stabilire se l'esistenza di un contatto ad un determinato tempo 𝑡 sia correlata o
meno all'esistenza di uno o più contatti avvenuti nel medesimo tempo.
Si partizionano i grafi dinamici dei contatti in forma aggregata, generati a
partire dai due modelli di mobilità, secondo la modularity. Da ogni partizione si
selezionano i primi 10 archi con peso più alto (ossia quelli più frequenti), per i quali
viene calcolata la matrice di correlazione. Nei grafi mostrati in figura 5.1.2.11, si
osserva che nel caso del modello RWP i nodi vengono classificati in tante piccole
community e in una grossa, ciascuna delle quali (come mostrato nella figura 5.1.2.9)
non presenta correlazioni tra contatti avvenuti contemporaneamente. Lo stesso tipo
di classificazione avviene anche nel caso del modello TLW, dove ciascuna di esse
(come mostrato nella figura 5.1.2.10) non presenta correlazioni tra contatti distinti.
Questa volta il modello TLW non classifica i nodi in una grandissima
community perché, rispetto al caso precedente, i nodi tendenzialmente comunicano
solo con un ristretto numero di nodi. Invece il modello RWP presenta una grande
community, nel suo Contat Graph aggregato partizionato secondo la modularity,
perché rispetto al modello TLW i nodi interagiscono con mediamente con più nodi.
Se confrontiamo le due matrici con quella calcolata per SocialDIS (mostrata in figura
5.1.1.14), ci si accorge che in questo caso i modelli di mobilità mostrano delle
dipendenze temporali esigue, comunque differenti da quelle del caso reale. Questo
accade solo perché in aree di simulazione estese, la probabilità che due persone
comunichino a distanza ravvicinata è veramente bassa, dunque la correlazione
temporale tra contatti è improbabile.
I risultati ottenuti ci mostrano che, anche aumentando l'area di simulazione,
non aumentano le correlazioni statistiche tra i dati generati dai modelli TLW e RWP
e quelli forniti dall'esperimento SocialDIS, confutando l'ipotesi per cui tali modelli
possano risultare validi aumentando le dimensioni dell'ambiente.

113
Fig. 5.1.2.9: Vengono mostrate le matrici di correlazione aventi il maggior numero di
correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando la
Modularity sul grafo aggregato, ottenuto simulando il Random Waypoint model.
L'intensità del giallo indica quanto l'esistenza di due archi è correlata nel tempo.
Maggiore è l'intensità, maggiore è la correlazione temporale tra i due archi.

114
Fig. 5.1.2.10: Vengono mostrate le matrici di correlazione aventi il maggior numero
di correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando
la Modularity sul grafo aggregato, ottenuto simulando il Truncated Lévy Walk model.
L'intensità del giallo indica quanto l'esistenza di due archi è correlata nel tempo.
Maggiore è l'intensità, maggiore è la correlazione temporale tra i due archi.

115
Fig. 5.1.2.11: Il grafo a sinistra mostra mostrate le community ottenute calcolando la
Modularity sul grafo aggregato ottenuto simulando il RW model, mentre il grafo a
destra mostra le community ottenute calcolando la Modularity sul grafo aggregato
ottenuto simulando il TLW model. I numeri sono gli identificativi delle community.

116
5.2 Comparazione con i dati dell'esperimento MACRO
5.2.1 Modelli nella loro formulazione originaria
I 114 visitatori che hanno partecipato all'esperimento NeonMACRO, si sono
mossi in un'area rettangolare di circa 25𝑚 𝑥 47𝑚, dove per circa 8938 𝑠𝑒𝑐𝑜𝑛𝑑𝑖
(2,48 𝑜𝑟𝑒) sono stati registrati tutti i contatti face-to-face che sono avvenuti durante
la mostra d'arte contemporanea. Per simulare le interazioni nei modelli di mobilità
vengono usati 114 nodi con un raggio di visibilità di 1𝑚, distribuiti in un'area
rettangolare di 25𝑚 𝑥 47𝑚, e vengono configurati i parametri di lunghezza dei
percorsi, velocità dei nodi e tempo di pausa, per generare dataset che possano avere
delle caratteristiche simili a quelle ottenute dal mondo reale. Per il RW model vengono
assegnati ai nodi velocità uniformemente distribuite tra 0.01 e 0.7 m/s.
Per il TLW model, le flight lengths (𝑙) e i waiting times (𝑡) seguono le
truncated power laws 𝑝 𝑙 ~ 𝑙 − 1+𝛼 , 𝑙 < 𝑙𝑚𝑎𝑥 e 𝜓 𝑡 ~𝑡− 1+𝛽 , 0 < 𝑡 < 𝑡𝑚𝑎𝑥 , con
𝛼 = 1.6, 𝛽 = 0.8, 𝑙𝑚𝑎𝑥 = 25, 𝑡𝑚𝑎𝑥 = 600𝑠 (10 𝑚𝑖𝑛𝑢𝑡𝑖), con angoli di rotazione
presi da una distribuzione uniforme e velocità dei nodi proporzionale alle flight
lengths. Il numero di secondi di ciascuna simulazione è pari a 8938 𝑠𝑒𝑐𝑜𝑛𝑑𝑖
(2,48 𝑜𝑟𝑒), ossia il tempo per cui è stato deciso di tracciare le interazioni.
Durante l'importazione del dataset empirico, la soglia entro la quale una
disconnessione non viene considerata come interruzione del contatto (parametro
configurabile nel DNF Importer) è stata fissata a tre. Nelle tabelle 5.2.1-1 e 5.2.1-2
vengono mostrate le statistiche calcolate sui tre grafi aggregati (che non considerano
i Presence schedules associati a ciascun nodo/arco e dove il peso di ciascun arco è pari
alla sua frequenza), che mostrano risultati simili a quelli ottenuti nell'analisi del
dataset SocialDIS, ovvero che nei dataset sintetici avvengono un numero maggiore di
interazioni tra individui rispetto al caso reale e che i Dynamic Contact Graph aggregati
generati secondo i modelli RWP e TLW sono notevolmente densi e coesi. Come ci si
aspettava, comparando le Strength distribution dei due dataset sintetici con quella del
dataset NeonMacro (mostrate in figura 5.2.1.1), si scopre che non si presentano
somiglianze. La strength dei nodi che si muovono secondo i modelli di mobilità risulta
essere maggiore, perché essi interagiscono in media con un numero superiore di

117
vicini. Anche in questa analisi risulta evidente che tali modelli falliscono nel
riprodurre le proprietà strutturali del grafo dinamico dei contatti in forma aggregata.
Dataset # Edges Average
degree
Average
strength
Graph
density
NeonMACRO 132 2,316 0,004 0,02
TLW 5394 94,63 1,1 0,83
RWP 6120 107,368 1,2 0,95
Tabella 5.2.1-1: Vengono mostrati: il numero di archi, il degree medio, il degree
medio pesato (o strength ) e la densità del grafo. NeonMACRO è il dataset ottenuto
dall'esperimento reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint Mobility Model e il Truncated Lévy Walk
Mobility Model.
Dataset Average Clustering
Coefficient
Average Weighted
Clustering Coefficient
NeonMACRO 0,378 0,237
TLW 0,848 0,853
RWP 0,951 0,951
Tabella 5.2.1-2: Cluster coefficient medio (pesato e non pesato), calcolato su tre
dataset: NeonMACRO è il dataset ottenuto dall'esperimento reale, mentre TLW ed
RWP sono synthetic dataset generati rispettivamente simulando il Random Waypoint e
il Truncated Lévy Walk models.
Nelle figure 5.2.1.2 e 5.2.1.3 si confrontano rispettivamente la Inter Contact Time
distribution e la Intra Contact Time distribution, calcolata sul dataset raccolto durante
l'esperimento NeonMACRO e sui due dataset ottenuti a partire dai modelli di
mobilità.

118
Fig. 5.2.1.1: Node Strength distribution con F(Strength) = frazione di nodi con
(Strength/Max Strength) >= Strength. Comparazione della distribuzione di tre
dataset, uno collezionato nell'esperimento SocialDIS e due generati dai modelli di
mobilità, entrambi con 116 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.8 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 0.8, 𝛽 = 0.3.
Dataset Average Intra-
contact Time
(seconds)
Average Inter-
contact Time
(seconds)
# Contact # Interval
NeonMACRO 1,7 51,2 1.325 966
TLW 20,7 645,8 28.187 325
RWP 32,7 1.619,3 19.117 246
Tabella 5.2.1-3: La tabella mostra la durata media di un contatto (tra due nodi e
dell'intervallo di tempo che intercorre tra due successivi contatti tra gli stessi nodi), il
numero di contatti e il numero di intervalli. NeonMACRO è il dataset ottenuto
dall'esperimento reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint e il Truncated Lévy Walk Model.

119
Fig. 5.2.1.2: Comparazione dell' Inter Contact Time distribution di tre dataset, uno
collezionato nell'esperimento NeonMACRO e due generati dai modelli di mobilità,
entrambi con 114 nodi con un contact detection range di 1𝑚: Per il RW model abbiamo
assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7 m/s, e il TLW
model, le flight lengths e i pause times seguono le truncated power laws con 𝛼 = 1.6,
𝛽 = 0.8.
Al contrario di quello che è accaduto nel caso del dataset SocialDIS, l'andamento
della Inter e Intra contact time distribution del NeonMACRO si discosta dall'andamento
delle distribuzione ottenute dai due dataset sintetici. Tale differenza è ben evidente
anche nei risultati mostrati nella tabella 5.2.1-3, dove viene constatato un maggiore
numero di contatti tra i nodi dei modelli di mobilità, che però si reincontrano di rado.
Come è successo nel caso SocialDIS, i modelli RWP e TLW non catturano un
comportamento tipico dei visitatori di un museo, i quali tendono a non comunicare
con altri visitatori che non conoscono e ad interagire solo con quelli che conoscono.

120
Fig. 5.2.1.3: Comparazione dell' Intra Contact Time distribution di tre dataset, uno
collezionato nell'esperimento NeonMACRO e due generati dai modelli di mobilità,
entrambi con 114 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 1.6, 𝛽 = 0.8.
Nell'esperimento SocialDIS simulando la diffusione di un'informazione, è
stato verificato che le reti dinamiche, ottenute a partire dai modelli di mobilità,
falliscono nel rappresentare il processo diffusivo del caso reale. Per verificarlo anche
in questo secondo esperimento, si è calcolata la metrica Flooding sul dataset empirico
del NeonMacro e su quelli relativi ai due modelli di mobilità. Dalla figura 5.2.1.4,
risulta chiaro che anche questa volta i modelli RWP e TLW non sono adeguati per
simulare il comportamento diffusivo del caso reale considerato. Analizzando il
numero di individui raggiunti dal messaggio entro la fine dell'esperimento
NeonMACRO, si osserva che non vengono mai raggiunti tutti i visitatori.

121
Fig. 5.2.1.4: Comparazione della Flooding time distribution di tre dataset, uno
collezionato nell'esperimento NeonMacro e due generati a partire dai modelli di
mobilità, entrambi con 114 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 1.6, 𝛽 = 0.8.
Il numero di individui raggiunti dall'informazione dipende dal numero di
componenti connesse. Nel caso NeonMACRO si hanno molti cluster isolati, mentre
nel caso dei modelli di mobilità si ha un'unica componente connessa. Per questo
motivo, il messaggio nel caso reale, non arriva a tutti gli individui se il seed appartiene
a un cluster non connesso con tutte le altre community.
Inoltre bisogna considerare il fatto che tutti i visitatori che lasciano il museo
prima dell'arrivo del seed non possono essere infettati a meno che non ritornino nella
sala espositiva una seconda volta, e questo accade di rado.
Nelle figure 5.2.1.5 e 5.2.1.6, è possibile ossservare l'andamento della
Conditional probability Distribution of link's existence applicata ai dati raccolti
nell'esperimento NeonMacro e ai dati collezionati simulando il RW mobility model e
il TLW mobility model. Come era plausibile attendersi, dato che tra i tre dataset non

122
si sono osservate delle similatirà nei contact time, ancora una volta i modelli di mobilità
sottostimano la probabilità per cui un contatto esiste in uno specifico istante
temporale sapendo che è esistito nell'istante precedente e sovrastimano invece la
probabilità per cui un nodo esiste in un determinato istante 𝑡 sapendo che non è
esistito all'istante 𝑡 − 1. Inoltre sembrerebbe che le dipendenze temporali seguano un
processo con caratteristiche di tipo markoviano.
Per valutare la validità della stima appena fatta, anche questa volta, si misura
la variabilità nel tempo della 𝑃𝑒 , utilizzando la metrica Link's existence variabilità. Si
calcola la probabilità 𝑃𝑒,𝑖 , con 𝑖 ∈ 1, … , 𝑁𝐸 (dove 𝑁𝐸 è il numero di epoche
costituite ognuna da 100 secondi), per ognuno dei tre dataset, prima per ogni arco 𝑒
del grafo (figura 5.2.1.7) e poi per un campione di venti archi scelti casualmente
(figura 5.2.1.8). Anche questa volta l'andamento medio della 𝑃𝑒 nelle varie epoche
risulta essere con buona approssimazione stazionario.
Fig. 5.2.1.5: Conditional Probability distribution dove F(𝑥) = frazione di archi con
𝑃𝑒,0/Pe >= x. Comparazione della Conditional Probability distribution di tre dataset,
uno collezionato nell'esperimento NeonMACRO e due generati dai modelli di
mobilità, entrambi con 114 nodi con un contact detection range di 1𝑚: Per il Random
Waypoint model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01

123
e 0.7 m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times seguono le
truncated power laws con 𝛼 = 1.6, 𝛽 = 0.8.
Si vuole ora verificare se esiste o meno una correlazione tra i contatti che avvengono
tra coppie distinte d' individui, ossia se l'esistenza di un contatto ad un determinato
istante temporale sia correlata o meno all'esistenza di uno o più contatti avvenuti
nello stesso istante.
Si effettua tale verifica calcolando la Pearson Correlation Matrix. Da ogni cluster
classificato secondo la modularity (vededere i grafi ottenuti nelle figure 5.2.1.12 e
5.2.1.13) vengono estrapolati i primi 10 archi più frequenti, per i quali viene calcolata
la matrice di correlazione. Per i motivi già descritti nell'analisi relativa all'esperimento
SocialDIS, i nodi che appartengono ai Contact Graph aggregati, generati dai modelli di
mobilità, tendono ad essere classificati secondo la modularity in pochi e grandi
gruppi, contrariamente a quanto accade per il Contact Graph aggregato generato a
partire dai dati del NeonMACRO, dove i nodi vengono classificati in tante piccole
community, di cui molte isolate.
Fig. 5.2.1.6: Conditional Probability Distribution dove F(x) = frazione di archi con
𝑃𝑒,1/Pe ≥ x. Comparazione della Conditional Probability distribution di tre dataset,
uno collezionato nell'esperimento NeonMACRO e due generati dai modelli di

124
mobilità, entrambi con 114 nodi con un contact detection range di 1𝑚: Per il Random
Waypoint model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01
e 0.7 m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times seguono le
truncated power laws con 𝛼 = 1.6, 𝛽 = 0.8.
Questo risultato rispecchia il fatto che, rispetto al contesto del NeonMACRO, nei
due modelli di mobilità si presentano un maggiore numero di contatti tra tutti gli
individui indipendentemente dal fatto che essi si conoscano o meno. Inoltre ancora
una volta i nodi che si muovono secondo il modello di mobilità TLW vengono
classificati in una grande community, molto più grande di quelle ottenute nel caso
RWP. Tale fenomeno accade perché nel modello TLW i nodi hanno una minor
probabilità di reincontrarsi, dato che seguono traiettorie meno dettate dal caso.
Nelle figure 5.2.1.9, 5.2.1.10 e 5.2.1.11, è possibile notare che le matrici di
correlazione calcolate sul dataset NeonMACRO e sui dataset ottenuti usando i
modelli di mobilità RW e TLW. Comparando le matrici relative al caso reale con
quelle ottenute dai casi simulati, si osserva che nel primo caso le correlazioni
temporali tra contatti distinti sono presenti solo in una community e scarse (o quasi
assenti) nelle altre, mentre nel secondo caso il modello RWP presenta un buon
numero di correlazioni e il modello TLW ne presenta un numero esiguo. Dall'analisi
che è stata condotta, ci accorgiamo che, anche in questo caso entrambi i modelli di
mobilità generano tracce di contatti che statisticamente non presentano alcuna
somiglianza rispetto alle tracce di contatto del caso reale.

125
Fig. 5.2.1.7: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 100 secondi. La distribuzione è stata calcolata su tutti
gli archi del grafo.
Fig. 5.2.1.8: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 100 secondi. La distribuzione è stata calcolata su un
sottoinsieme di 20 archi scelti casualmente.

126
Come è stato scoperto nell'analisi svolta nel caso dell'esperimento SocialDIS,
i modelli non riescono assolutamente a riprodurre il comportamento degli individui
dello specifico scenario considerato. In un museo i visitatori tipicamente spendono
una limitata quantità di tempo sul posto, ben al di sotto della massima durata di
apertura permessa, terminata la visita non ritornano una seconda volta, entrano ed
escono dalla sala espositiva in orari differenti, comunicano poco tra di loro a meno
che non si conoscono e seguono dei percorsi quasi predefiniti.
Nei modelli di mobilità adottati, invece, le persone rimangono sempre nella
sala espositiva, comunicano quasi con tutti eseguono percorsi casuali (nel caso RWP)
o percorsi di tipo Lévy walk (nel caso TLW). Come già è stato detto nel paragrafo
5.1, la validità del modello di mobilità TLW è stata verificata in ambienti outdoor
[20], dove le persone si muovo in aree estese, mentre nell'esperimento che abbiamo
condotto i visitatori del museo si muovono in una sala dall'area relativamente
limitata. Lo stesso concetto potrebbe valere anche per il modello RWP.
Come è stato fatto nel sotto-paragrafo 5.1.2 (caso SocialDIS), nel prossimo sotto-
paragrafo, tenendo conto di queste considerazioni, verrà analizzato il comportamento
dei due modelli nel caso in cui aumentiamo di un fattore 10 le dimensioni dell'area di
simulazione.

127
Fig. 5.2.1.9: Vengono mostrate le matrici di correlazione aventi il maggior numero di
correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando la
Modularity sul grafo aggregato, ottenuto dal dataset NeonMACRO. L'intensità del
giallo indica quanto l'esistenza di due archi è correlata nel tempo. Maggiore è
l'intensità, maggiore è la correlazione temporale tra i due archi.

128
Fig. 5.2.1.10: Vengono mostrate le matrici di correlazione aventi il maggior numero
di correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando
la Modularity sul grafo aggregato, ottenuto simulando il Random Waypoint model.
L'intensità del giallo indica quanto l'esistenza di due archi è correlata nel tempo.
Maggiore è l'intensità, maggiore è la correlazione temporale tra i due archi.

129
Fig. 5.2.1.11: Vengono mostrate le matrici di correlazione delle due community,
classificate calcolando la Modularity sul grafo aggregato, ottenuto simulando il
Truncated Lévy Walk model. L'intensità del giallo indica quanto l'esistenza di due archi è
correlata nel tempo. Maggiore è l'intensità, maggiore è la correlazione temporale tra i
due archi.
Fig. 5.2.1.12: Mostra le community ottenute calcolando la Modularity sul grafo
aggregato dell'esperimento NeonMACRO.

130
Fig. 5.2.1.13: Il grafo a sinistra mostra mostrate le community ottenute calcolando la
Modularity sul grafo aggregato ottenuto simulando il RW model, mentre il grafo a
destra mostra le community ottenute calcolando la Modularity sul grafo aggregato
ottenuto simulando il TLW model. I numeri sono gli identificativi delle community.
5.2.2 Modelli con aree di simulazione scalate di un fattore 10
Viene ora verificato, come fatto nel paragrafo 5.1.2, se aumentare di un
fattore 10 le dimensioni dell'area di simulazione, renda le statistiche dei modelli di
mobilità più simili a quelle del caso NeonMACRO. Nelle simulazioni vengono
utilizzati 114 nodi con un raggio di visibilità di 1𝑚, distribuiti in un'area rettangolare
di 240𝑚 𝑥 470𝑚, ed vengono assegnati ai parametri gli stessi valori dell'analisi
precedente. Per il RW model abbiamo assegnato ai nodi velocità uniformemente
distribuite tra 0.01 e 0.7 m/s.
Per il TLW model, le flight lengths (𝑙) e i waiting times (𝑡) seguono le
truncated power laws 𝑝 𝑙 ~ 𝑙 − 1+𝛼 , 𝑙 < 𝑙𝑚𝑎𝑥 e 𝜓 𝑡 ~𝑡− 1+𝛽 , 0 < 𝑡 < 𝑡𝑚𝑎𝑥 , con
𝛼 = 1.6, 𝛽 = 0.8, 𝑙𝑚𝑎𝑥 = 240, 𝑡𝑚𝑎𝑥 = 600𝑠 (10 𝑚𝑖𝑛𝑢𝑡𝑖) e la durata della
simulazione è sempre pari a 8938 𝑠𝑒𝑐𝑜𝑛𝑑𝑖 (2,48 𝑜𝑟𝑒).
Nelle tabelle 5.2.2-1 e 5.2.2-2 si nota che i Contact Graph in forma aggregata,
generati a partire dai modelli RWP e TLW, tendono ad essere più accurati rispetto
alle proprietà strutturali del grafo. Nello specifico, il modello TLW presenta delle
notevoli similarità per quanto riguarda la quantità d'interazioni e la formazione di
cluster. In figura 5.2.2.1, confrontando le Strength distribution, si osserva che la strength
dei nodi (che si muovono secondo il modello TLW) tende ad avvicinarsi a quella dei

131
visitatori del museo. Pertanto si scopre che aumentando l'area di simulazione di un
fattore 10, il TLW Mobility Model riesce a riprodurre in modo più accurato le
proprietà strutturali del dataset NeonMACRO. Il RWP non risulta essere ancora
abbastanza adeguato.
Dataset # Edges Average
degree
Average
strength
Graph
density
NeonMACRO 132 2,2 0,004 0,02
TLW 188 3,3 0,013 0,03
RWP 615 10,7 0,016 0,09
Tabella 5.2.2-1: Vengono mostrati: il numero di archi, il degree medio, il degree
medio pesato (o strength ) e la densità del grafo. NeonMACRO è il dataset ottenuto
dall'esperimento sociale reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint Mobility Model e il Truncated Lévy Walk
Mobility Model, entrambi con l'area di simulazione scalata di un fattore 10.
Dataset Average Clustering
Coefficient
Average Weighted
Clustering Coefficient
NeonMACRO 0,36 0,24
TLW 0,26 0,22
RWP 0,12 0,12
Tabella 5.2.2-2: Cluster coefficient medio (pesato e non pesato), calcolato su tre
dataset: NeonMACRO è il dataset ottenuto dall'esperimento sociale reale, mentre
TLW ed RWP sono synthetic dataset generati rispettivamente simulando il Random
Waypoint e il Truncated Lévy Walk models, entrambi con l'area di simulazione scalata di
un fattore 10.
Per quanto riguarda le proprietà temporali delle comunicazioni tra persone, nelle
figure 5.2.2.2 e 5.2.2.3 vengono comparate rispettivamente la Inter Contact Time
distribution e la Intra Contact Time distribution, tra il dataset NeonMACRO e i due dataset
sintetici.

132
Fig. 5.2.2.1: Node Strength distribution con F(Strength) = frazione di nodi con
(Strength/Max Strength) >= Strength. Comparazione della distribuzione di tre
dataset, uno collezionato nell'esperimento NeonMACRO e due generati dai modelli
di mobilità, entrambi con 114 nodi con un contact detection range di 1𝑚: Per il RW model
abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7 m/s, e il
TLW model, le flight lengths e i pause times seguono le truncated power laws con
𝛼 = 1.6, 𝛽 = 0.8.
Da entrambe le figure e dalla tabella 5.2.2-3, si nota che non c'è alcuna
correlazione tra le distribuzioni e che nel modello RWP due stessi nodi non
ricomunicano mai.
Dataset Average Intra-
contact Time
(seconds)
Average Inter-
contact Time
(seconds)
# Contact # Interval
NeonMACRO 1,7 51,2 1.325 966
TLW 17,8 179,2 369 5
RWP 12,0 0 650 0
Tabella 5.2.2-3: La tabella mostra la durata media di un contatto (tra due nodi e
dell'intervallo di tempo che intercorre tra due successivi contatti tra gli stessi nodi), il

133
numero di contatti e il numero di intervalli. NeonMACRO è il dataset ottenuto
dall'esperimento sociale reale, mentre TLW ed RWP sono synthetic dataset generati
rispettivamente simulando il Random Waypoint e il Truncated Lévy Walk Model, entrambi
con l'area di simulazione scalata di un fattore 10.
Fig. 5.2.2.2: Comparazione dell'Inter Contact Time distribution di tre dataset, uno
collezionato nell'esperimento NeonMACRO e due generati dai modelli di mobilità,
entrambi con 114 nodi con un contact detection range di 1𝑚: Per il RW model abbiamo
assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7 m/s, e il TLW
model, le flight lengths e i pause times seguono le truncated power laws con 𝛼 = 1.6,
𝛽 = 0.8.
Pertanto si nota che lo stesso contatto tra due individui distinti si ripresenta
veramente di rado, se non affatto, nei due modelli di mobilità. Questo ha luogo
perché i nodi che si muovono secondi i mobility models RWP e TLW, spostandosi in
aree più grandi, hanno meno probabilità di comunicare e ricomunicare. Aumentare la
grandezza dell'area di simulazione sottostima le comunicazioni avvenute tra i
visitatori del museo che hanno partecipato all'esperimento. In figura 5.2.2.4 si vede
che il modello RWP non riesce assolutamente a catturare lo schema di diffusione di
un messaggio tra visitatori. In questa figura vengono illustrati i risultati della metrica

134
Flooding Time nel caso in cui consideriamo le aree di simulazione aumentate, le quali ci
fanno rendere conto dell'incapacità dei modelli nel rappresentare il comportamento
diffusivo dello particolare contesto reale.
Fig. 5.2.2.3: Comparazione dell'Intra Contact Time distribution di tre dataset, uno
collezionato nell'esperimento NeonMACRO e due generati dai modelli di mobilità,
entrambi con 114 nodi con un contact detection range di 1𝑚: Per il RW model abbiamo
assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7 m/s, e il TLW
model, le flight lengths e i pause times seguono le truncated power laws con 𝛼 = 1.6,
𝛽 = 0.8.
In questo caso nel modello TLW l'informazione tende a propagarsi più
lentamente rispetto ai casi NeonMACRO e RWP, perché come si è osservato dai
risultati delle statistiche appena descritte, i nodi hanno una minore probabilità di
interagire.
Nel modello TLW tali nodi comunicano sporadicamente perché spostandosi
in grandi aree, tendono a seguire percorsi molto più lineari rispetto al caso RWP
(vedere le motivazioni nel paragrafo 2.1.4). Questa analisi dimostra l'inadeguatezza

135
dei modelli, forse dovuta al fatto che essi non tengono conto della non casualità dei
percorsi che gli i visitatori di un museo seguono durante la mostra d'arte.
Fig. 5.2.2.4: Comparazione della Flooding time distribution di tre dataset, uno
collezionato nell'esperimento NeonMACRO e due generati a partire dai modelli di
mobilità, entrambi con 114 nodi con un contact detection range di 1𝑚: Per il RW
model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7
m/s, e il TLW model, le flight lengths e i pause times seguono le truncated power laws
con 𝛼 = 1.6, 𝛽 = 0.8
Si analizzano ora gli effetti che si hanno per quanto riguarda la Conditional probability
Distribution of link's existence. Osservando le figure 5.2.2.5 e 5.2.2.6, si evince che i
modelli RWP e TLW sottostimano entrambe le probabilità condizionate. Nello
specifico la sottostima risulta maggiore nel caso RWP, perché come è stato
constatato dall'analisi delle contat time distribution, in esso i nodi non si reincontrano
mai. Inoltre notiamo che anche questa volta sembra esistere una dipendenza
temporale con caratteristiche di tipo markoviano riguardo l'esistenza di ciascun nodo,
dunque il presence schedule di un arco (o contatto) che avviene secondo i modelli di
mobilità, contiene lunghi periodi in cui esso non esiste e lunghi periodi in cui esso
esiste.

136
Fig. 5.2.2.5: Conditional Probability distribution dove F(𝑥 = frazione di archi con
𝑃𝑒,0/Pe ≥ x. Comparazione della Conditional Probability distribution di tre dataset,
uno collezionato nell'esperimento NenoMACRO e due generati dai modelli di
mobilità, entrambi con 114 nodi con un contact detection range di 1𝑚: Per il Random
Waypoint model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01
e 0.7 m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times seguono le
truncated power laws con 𝛼 = 1.6, 𝛽 = 0.8
Fig. 5.2.2.6: Conditional Probability Distribution dove F(𝑥) = frazione di archi con

137
𝑃𝑒,1/Pe ≥ x. Comparazione della Conditional Probability distribution di tre dataset,
uno ottenuto nell'esperimento NeonMACRO e due generati dai modelli di mobilità,
entrambi con 114 nodi con un contact detection range di 1𝑚: Per il Random Waypoint
model abbiamo assegnato ai nodi velocità uniformemente distribuite tra 0.01 e 0.7
m/s, e il Truncated Lévy Walk model, le flight lengths e i pause times seguono le
truncated power laws con 𝛼 = 1.6, 𝛽 = 0.8.
Nelle figure 5.2.2.7 e 5.2.2.8 ci si accorge che mediamente la probabilità di
esistenza di un contatto risulta essere mediamente stazionaria in tutti e tre i casi.
Per quanto riguarda le correlazioni tra contatti, viene valutato cosa succede
calcolando le matrici di correlazione per ogni cluster classificato secondo la
modularity (vededere i grafi ottenuti nella figura 5.2.2.11). Nei grafi mostrati in figura
5.1.2.11, si osserva che nel caso del modello RWP i nodi vengono classificati in tanti
piccoli gruppi e in uno grosso, ognuno dei quali (come mostrato nella figura 5.2.2.9)
non presenta correlazioni tra contatti avvenuti contemporaneamente. Lo stesso tipo
di classificazione avviene anche nel caso del modello TLW, dove ciascuno di essi
(come mostrato nella figura 5.2.2.10) non presenta particolari correlazioni tra contatti
distinti.
Il modello TLW non classifica i nodi in un grandissimo gruppo perché,
rispetto al caso precendente, i nodi tendenzialmente comunicano solo con un
ristretto numero di nodi. Invece il modello RWP presenta una grande community,
nel suo Contat Graph aggregato partizionato secondo la modularity, perché rispetto al
modello TLW i nodi interagiscono con mediamente con più nodi. Se si confrontano
le due matrici con quella calcolata per NeoMACRO (mostrata in figura 5.2.1.14), ci
accorgiamo che in questo caso i modelli di mobilità mostrano delle dipendenze
temporali sporadiche, se non nulle, comunque differenti da quelle del caso reale
sopra citato. Questo accade solo perché in aree di simulazione estese, la probabilità
che due persone comunichino a distanza ravvicinata è veramente esigua, quindi la
correlazione temporale tra contatti risulta essere improbabile.

138
Fig. 5.2.2.7: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 100 secondi. La distribuzione è stata calcolata su tutti
gli archi del grafo.
Fig. 5.2.2.8: Distribuzione della probabilità che un arco esista o meno in una
determinata epoca costituita da 100 secondi. La distribuzione è stata calcolata su un
sottoinsieme di 20 archi scelti casualmente.

139
Fig. 5.2.2.9: Vengono mostrate le matrici di correlazione aventi il maggior numero di
correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando la
Modularity sul grafo aggregato, ottenuto simulando il Random Waypoint model.
L'intensità del giallo indica quanto l'esistenza di due archi è correlata nel tempo.
Maggiore è l'intensità, maggiore è la correlazione temporale tra i due archi.
Come è avvenuto nel caso SocialDIS, i risultati ottenuti mostrano che anche
aumentando l'area di simulazione non aumentano le correlazioni statistiche tra i dati
generati dai modelli TLW e RWP e quelli forniti dall'esperimento NeonMACRO,
confutando l'ipotesi per cui tali modelli possano risultare validi aumentando le
dimensioni dell'ambiente.

140
Fig. 5.2.2.10: Vengono mostrate le matrici di correlazione aventi il maggior numero
di correlazioni tra archi appartenenti alla rispettiva community, classificate calcolando
la Modularity sul grafo aggregato, ottenuto simulando il Truncated Lévy Walk model.
L'intensità del giallo indica quanto l'esistenza di due archi è correlata nel tempo.
Maggiore è l'intensità, maggiore è la correlazione temporale tra i due archi.

141
Fig. 5.2.2.11: Il grafo a sinistra mostra mostrate le community ottenute calcolando la
Modularity sul grafo aggregato ottenuto simulando il RW model, mentre il grafo a
destra mostra le community ottenute calcolando la Modularity sul grafo aggregato
ottenuto simulando il TLW model. I numeri sono gli identificativi delle community.
5.3 Sintesi dei risultati ottenuti
In questo capitolo sono state confrontate statisticamente le tracce di contatti
collezionate a partire dagli esperimenti SocialDIS e NeonMACRO con quelle
ottenute a partire dai modelli di mobilità RWP e TLW. Confrontando le proprietà dei
Contact Graph in forma aggregata (Graph Density, Cluster Coefficient, Weighted
Clustering Coefficient, Strength, Modularity) e gli andamenti delle relative Contact
Time Distribution, si è notato che il comportamento tipico degli individui riscontrato
negli esperimenti sociali (ossia quello di comunicare prevalentemente con altri
individui con i quali si ha un legame d'amicizia e sporadicamente con altri individui
sconosciuti) non viene catturato dai modelli di mobilità RWP e TLW, dove invece le
persone tendono a comunicare con quasi tutte le altre e a ricomunicare poco con
quelle che hanno già precedentemente incontrato. Successivamente, attraverso lo
sviluppo di un semplice protocollo di flooding, si è mostrato che a causa dell'elevato
numero di comunicazioni che coinvolgono quasi tutti gli individui, nei due modelli di
mobilità un'informazione si propaga molto più velocemente rispetto ai casi SocialDIS
e NeonMACRO.

142
Confrontando poi le Conditional Distribution of link's existence è stato verificato che nei
modelli di mobilità RWP e TLW, se un contatto si verifica ad un determinato tempo,
quasi sicuramente esso avverrà al tempo successivo, mentre se un contatto non
avviene in un determinato tempo quasi sicuramente non avverrà al tempo successivo.
Questo risultato è concorde a quelli precedenti per il fatto che entrambi i modelli di
mobilità generano comunicazioni tra stessi individui che si ripresentano raramente e
che mediamente durano di più, rispetto a quelle generate nei casi reali trattati.
Dunque il presence schedule di un arco (rappresentante un contatto) conterrà lunghi
periodi in cui esso esiste, seguiti da lunghi periodi in cui esso non esiste.
Confrontando le matrici di correlazione è stato appurato che i modelli RWP e TLW
mostrano un discreto quantitativo di correlazioni temporali tra contatti distinti, ossia
risultano frequenti le comunicazioni tra coppie di nodi distinte nello stesso istante
temporale. Questo comportamento si discosta da quello registrato nei casi SocialDIS
e NeonMacro, dunque le comunicazioni che avvengono tra i nodi che si muovono
secondo i modelli di mobilità, presentano dipendenze e correlazioni temporali che
non sono in linea con quanto accade negli esperimenti sociali.
Per validare l'ipotesi per cui i modelli RWP e TLW possano risultare validi
aumentando le dimensioni dell'ambiente in cui gli individui possono muoversi, sono
state poi rieffettuate tutte queste analisi statistiche considerando le dimensioni
dell'area di simulazione di entrambi i modelli aumentate di un fattore 10. I risultati
ottenuti mostrano che anche aumentando l'area di simulazione non aumentano le
correlazioni statistiche tra i dati generati dai modelli TLW e RWP e quelli forniti dagli
esperimenti SocialDIS e NeonMACRO, confutando l'ipotesi per cui tali modelli
possano risultare validi aumentando le dimensioni dell'area di simulazione.

143
Capitolo 6
Conclusioni
Nel lavoro svolto in questa tesi è stata condotta un'accurata analisi statistica che ha
permesso di stabilire quanto i contatti di prossimità, tracciati partendo dai modelli di
mobilità Random Waypoint (RWP) e Truncated Lévy Walk (TLW), riproducano proprietà
statistiche simili a quelle riscontrate nei dati ottenuti dagli esperimenti SocialDIS e
NeonMACRO. Tramite una piattaforma RFID-based sono stati collezionati i contatti
di prossimità tra persone in entrambi gli esperimenti. Da questi dati sono stati
costruiti dei grafi dinamici che mostrano l'evoluzione nel tempo delle interazioni
sociali tra individui.
I grafi dinamici costruiti sono stati analizzati sia in forma aggregata che in
forma dinamica, ossia rispettivamente aggregando le interazioni a distanza ravvicinata
per intervalli di tempo che vanno dalle 2 ore (nel caso NeonMACRO) alle 12 ore (nel
caso SocialDIS), e valutando l'evoluzione dei contatti secondo per secondo.
Le prime analisi condotte mostrano che nel caso SocialDIS tipicamente gli
individui hanno contatti di prossimità in prevalenza con altri individui con cui hanno
stretto un legame d'amicizia e raramente con altri individui sconosciuti, mentre nel
caso NeonMACRO le persone tendono a comunicare soprattutto con quelle che
appartengono alla stessa comitiva e sporadicamente con tutte le altre.
Questo comportamento tipico degli individui riscontrato negli esperimenti,
non viene catturato dai modelli di mobilità RWP e TLW, i quali sono stati
opportunamente configurati per riprodurre in modo realistico il movimento delle
persone nei due differenti contesti. In particolare, una differenza fondamentale
emerge confrontando i risultati forniti dalle metriche statiche applicabili sui grafi
aggregati e dalle metriche dinamiche applicabili su quelli non aggregati.
Gli agenti che si muovono secondo questi due modelli di mobilità tendono a
comunicare con quasi tutti gli altri agenti e tendono a produrre intervalli tra contatti
successivi che mediamente risultano essere eccessivamente lunghi.

144
Successivamente si sono investigate importanti differenze temporali indotte
dai modelli e presenti anche nelle tracce reali. I modelli RWP e TLW mostrano
significative correlazioni spaziali tra contatti distinti, contrariamente a quanto avviene
in SocialDIS e in NeonMacro, nei quali esse sono risultate di gran lunga inferiori.
Infine, attraverso l'implementazione di un semplice protocollo di flooding, si
è anche investigato su come un'informazione si diffonde tra le reti di contatti
dinamiche costruite a partire dai due modelli di mobilità e quelle generate a partire
dai due esperimenti sociali. Si è riscontrato che entrambi i modelli, proprio per
l'elevato numero di contatti che generano, non riproducono il comportamento
diffusivo osservato negli esperimenti SocialDIS e NeonMACRO.
6.1 Proposte di sviluppo future
Come è stato detto nel Capitolo 5, il comportamento delle persone registrato nei due
esperimenti sociali si discosta nettamente da quello prodotto dai due modelli di
mobilità, perché essi non tengono conto del fatto che:
1. le persone non scelgono casualmente la destinazione da raggiungere poichè
essa dipende dalle loro preferenze personali;
2. le persone tipicamente comunicano e si muovono più frequentemente con
persone con cui hanno un legame di conoscenza;
3. le persone entrano ed escono dal luogo dell'esperimento.
I primi due fattori possono essere affrontati fondendo ed utilizzando il modello di
mobilità Weighted Waypoint Mobility (illustrato nel paragrafo 2.1.8), dove le persone
scelgono la destinazione da raggiungere in base ad una determinata probabilità che
dipende da quanto esse tendono a visitarla, con il modello di mobilità Nomadic
Community Mobility Model (illustrato nel paragrafo 2.2.3), dove gruppi di nodi si
muovono da un punto ad un altro insieme, mentre nel punto in cui si trovano si
possono muovere individualmente come preferiscono. Quest'ultimo modello è
particolarmente adatto per simulare scenari come quelli del NeonMACRO, dove
gruppi di persone visitano un museo d'arte. Invece, per quanto concerne il terzo
fattore, viene proposta un'idea che potrebbe stare alla base di una versione adattata
dei modelli RWP e TLW, la quale tenta di simulare il fatto che gli individui possono
entrare ed uscire in qualsiasi momento dall'area di simulazione.

145
Si potrebbe rappresentare tale comportamento secondo una catena di Markov [66] a
due stati (mostrata in figura 6.1), dove un nodo può trovarsi in due stati differenti: lo
stato 0 rappresenta la sua esistenza nell'area di simulazione, mentre lo stato 1
rappresenta la sua assenza da tale area.
Fig.6.1: Diagramma di flusso della versione adattata del RWP e TLW Mobility
Model.
Utilizzando la seguente matrice di probabilità possiamo determinare l'esistenza di
uno specifico individuo in un'area 𝑋𝑚𝑎𝑥 × 𝑌𝑚𝑎𝑥 :
𝑃 = 𝑃(0,0) 𝑃(0,1)
𝑃(1,0) 𝑃(1,1)
Dove ciascun valore 𝑃(𝑎, 𝑏) rappresenta la probabilità che un nodo mobile passi
dallo stato 𝑎 allo stato 𝑏. L'esistenza o non esistenza di ciascun nodo nell'ambiente di
simulazione viene aggiornata in base ai valori della seguente matrice:
𝑃 = 1 − 𝑝 𝑝
𝑞 1 − 𝑞
Per trovare le probabilità dello stato stazionario, ossia la probabilità che a un certo
istante un nodo si trovi in uno dei due stati, dobbiamo calcolare il seguente limite:
lim𝑡→∞
𝑋0𝑃𝑡 = 𝑋

146
Dove 𝑋0𝑃𝑡 è la probabilità che al tempo t un nodo si trovi in un determinato stato a
partire dallo stato iniziale 𝑋0 e 𝑋 è la probabilità di stato stazionario. Calcolando tale
limite otteniamo che 𝑋 = (𝑞
𝑝+𝑞,
𝑝
𝑝+𝑞). Pertanto se si determinano le probabilità 𝑝 e 𝑞
analizzando le tracce di contatti ottenute nei casi SocialDIS e NeonMACRO, si
potrebbe costruire una versione adattata dei modelli di mobilità RWP e TLW che
potrebbe risultare più accurata nel catturare i comportamenti degli esperimenti sociali
proposti nella presente tesi.
Infine, per quanto riguarda il software sviluppato per effettuare le analisi
statistiche, bisogna tenere in considerazione che in futuro si potrebbe avere la
necessità di analizzare Contact Graph costruiti a partire da esperimenti sociali
particolarmente duraturi o comunque costituiti da milioni contatti.
Per questi casi computazionalmente onerosi, bisognerebbe adattare gli algoritmi che
calcolano le metriche per poter essere eseguiti su cluster di computer (dedicati o
cloud). Ad esempio una soluzione ragionevole potrebbe essere implementare le
metriche secondo MapReduce, un modello di programmazione per processare grandi
dataset in un grande sistema distribuito di computer [67].

147
Bibliografia
[1] A. Barrat and M. Barthelemy and R. Pastor-Satorras and A. Vespignani
(2004). "The architecture of complex weighted networks". Proceedings of the
National Academy of Sciences 101 (11): 3747–3752.
[2] D. J. Watts and Steven Strogatz (June 1998). "Collective dynamics of 'small-
world' networks". Nature 393 (6684): 440–442.
[3] J. L. Rodgers and W. A. Nicewander. Thirteen ways to look at the correlation
coefficient. The American Statistician, 42(1):59–66, February 1988.
[4] Stigler, Stephen M. (1989). "Francis Galton's Account of the Invention of
Correlation". Statistical Science 4 (2): 73–79.
[5] M. E. J. Newman. Assortative mixing in networks. Physical Review Letter,
89:208701, 2002.
[6] M. E. J. Newman. Mixing patterns in networks. Physical Review E,
67:026126,2003.
[7] M. E. J. Newman and Juyong Park. Why social networks are different from
other types of networks. Phys. Rev. E, 68(3):036122, Sep 2003.
[8] Afonso Ferreira. Building a reference combinatorial model for manets. IEEE
Network, 18(5):24-29, 2004
[9] Interval Tree http://en.wikipedia.org/wiki/Interval_tree
[10] http://fastutil.dsi.unimi.it/docs/overview-summary.html
[11] Mathieu Bastian, Sebastien Heymann, and Mathieu Jacomy. Gephi: An Open
Source Software for Exploring and Manipulating Networks. In International
Conference on Weblogs and Social Media, 2009.
[12] Synthetic data. (n.d.). McGraw-Hill Dictionary of Scientific and Technical
Terms.
[13] Tracy Camp, Je Boleng, and Vanessa Davies. A survey of mobility models
for ad hoc network research. Wireless Communications and Mobile
Computing, 2(5):483-502, 2002.
[14] Christian Bettstetter. Mobility modeling in wireless networks: categorization,
smooth movement, and bordereects. SIGMOBILE Mob. Comput.
Commun.Rev., 5:55-66, July 2001.
[15] M. M. Zonoozi and P. Dassanayake. User mobility modeling and
characterization of mobility patterns. Selected Areas in Communications,
IEEE Journal on, 15(7):1239-1252, September 1997.
[16] Xiaoyan Hong, Mario Gerla, Guangyu Pei, and Ching-Chuan Chiang. A grou
mobility model for ad hoc wireless networks. In Proceedings of the 2nd
ACM international workshop on Modeling, analysis and simulation of
wireless and mobile systems, MSWiM '99, pages 53-60, New York, NY, USA,
1999. ACM.

148
[17] G. Pei, M. Gerla, X. Hong, and C.-C. Chiang. A wireless hierarchical routing
protocol with group mobility. In Wireless Communications and Networking
Conference, 1999. WCNC., volume 3, pages 1538-1542. IEEE, 1999.
[18] K.H. Wang and Baochun Li. Group mobility and partition prediction in
wireless ad-hoc networks. In Communications, 2002. ICC 2002. IEEE
International Conference on, volume 2, pages 1017-1021 vol.2, 2002.
[19] Joseph Klafter, Michael F. Shlesinger, and Gert Zumofen. Beyond Brownian
Motion. Physics Today, 49(2):33+, 1996.
[20] Injong Rhee, Minsu Shin, Seongik Hong, Kyunghan Lee, and Song Chong.
On the Levy-Walk Nature of Human Mobility. In 2008 IEEE INFOCOM -
The 27th Conference on Computer Communications, pages 924-932. IEEE,
April 2008.
[21] Seongik Hong, Injong Rhee, Seong Joon Kim, Kyunghan Lee, and Song
Chong. Routing Performance Analysis of Human-Driven Delay Tolerant
Networks using the Truncated Levy Walk Model. In MobilityModels '08:
Proceeding of the 1st ACM SIGMOBILE International Workshop on
Mobility Models for Networking Research, pages 25-32, New York, NY,
USA, 2008. ACM.
[22] Thomas Karagiannis, Jean-Yves Le Boudec, and Milan Vojnovic. Power law
and exponential decay of inter contact times between mobile devices. In
Proceedings of the 13th annual ACM international conference on Mobile
computing and networking, MobiCom '07, pages 183-194, New York, NY,
USA, 2007. ACM.
[23] Girvan M and Newman M E J, 2002 Proc. Natl. Acad. Sci. USA 99 7821.
[24] Newman M E J, 2006 Proc. Natl. Acad. Sci. USA 103 8577
[25] Newman M E J, 2004 Phys. Rev. E 70 056131.
[26] Andrè Panisson. Selective Information Dissemination for Mobile
Computing.
[27] http://wiki.gephi.org/index.php/HowTo_write_an_import
[28] http://wiki.gephi.org/index.php/HowTo_write_a_graph_generator
[29] http://wiki.gephi.org/index.php/HowTo_write_a_metric
[30] A. Chaintreau, P. Hui, J. Crowcroft, C. Diot, R. Gass, and J. Scott. Impact of
Human Mobility on the Design of Opportunistic Forwarding Algorithms. In
Proc. 25th IEEE Infocom, pages 1–13. IEEE, 2006.
[31] M. C. Gonzàlez, C. A. Hidalgo, A.-L. Barabàsi, Understanding individual
human mobility patterns, Nature 453 (2008) 779-782.
[32] C. Song, Z. Qu, N. Blumm, A.-L. Barabàsi, Limits of Predictability in Human
Mobility, Science 327 (2010) 1018-1021.
[33] T. Henderson, D. Kotz, and I. Abyzov, “The changing usage of a mature
campus-wide wireless network,” in MobiCom ’04: Proceedings of the 10th
annual international conference on Mobile computing and networking, 2004,
pp. 187–201

149
[34] J. Su, A. Chin, A. Popivanova, A. Goel, and E. de Lara, “User mobility for
opportunistic ad-hoc networking,” in Proceedings of the 6th IEEE
Workshop on Mobile Computing Systems and Applications (WMCSA’04),
2004.
[35] Finkenzeller, K.: RFID handbook, Wiley Hoboken, NJ (2003).
[36] http://www.sociopatterns.org
[37] C. Cattuto, W. Van den Broeck, A. Barrat, V. Colizza, J.-F. Pinton, A.
Vespignani, Dynamics of person-to-person interactions from distributed
RFID sensor networks, PLoS ONE 5(7) (2010) e11596.
[38] H. Alani, M. Szomsor, C. Cattuto, W. Van den Broeck, G. Correndo, A.
Barrat, Live Social Semantics, 8th International Semantic Web Conference
ISWC2009, Lecture Notes in Computer Science 5823 (2009) 698-714,
http://dx.doi.org/10. 1007/978-3-642-04930-9_44.
[39] W. Van den Broeck, C. Cattuto, A. Barrat, M. Szomsor, G. Correndo, H.
Alani, The Live Social Semantics application: a platform for integrating face-
to-face presence with on-line social networking, First International
Workshop on Communication, Collaboration and Social Networking in
Pervasive Computing Environments (PerCol 2010), Proceedings of the 8th
Annual IEEE International Conference on Pervasive Computing and
Communications, Mannheim, Germany (2010) 226-231.
[40] Ciro Cattuto, Wouter Van den Broeck, Alain Barrat, Vittoria Colizza, Jean-
Francois Pinton, and Alessandro Vespignani. Dynamics of Person-to-Person
Interactions from Distributed RFID Sensor Networks. PLoS ONE,
5(7):e11596, 07 2010. [41] M. McNett and G. M. Voelker, “Access and mobility of wireless PDA users,”
Computer Science and Engineering, UC San Diego, Tech. Rep., 2004.
[42] D. Kotz and T. Henderson. CRAWDAD: A Community Resource for
Archiving
[43] Wireless Data at Dartmouth. Pervasive Computing, IEEE, 4(4):12-14, oct.-
dec. 2005.
[44] http://wiserver.dis.uniroma1.it/cms/index.php/projects/3-socialdis
[45] http://wiserver.dis.uniroma1.it/cms/index.php/projects/15-macro
[46] http://wiserver.dis.uniroma1.it
[47] http://www.fim.uni-passau.de/en/fim/faculty/chairs/theoretische-
informatik/projects.html
[48] Pan Hui, Augustin Chaintreau, James Scott, Richard Gass, Jon Crowcroft,
and Christophe Diot. Pocket switched networks and human mobility in
conference environments. In WDTN '05: Proceedings of the 2005 ACM
SIGCOMM workshop on Delay-tolerant networking, pages 244-251, New
York, NY, USA, 2005. ACM.
[49] Nathan Eagle and Alex Pentland. Reality mining: sensing complex social
systems. Personal and Ubiquitous Computing, 10(4):255-268, 2006.

150
[50] Albert Einstein. Investigations on the Theory of the Brownian Movement.
ed. Reinhold Fürth, tradotto da A.D. Cowper. Dover books on physics.
Dove Publications, 1926, reprinted 1956.
[51] E.M. Royer, P.M. Melliar-Smith, and L.E. Moser. An analysis of the optimum
node density for ad hoc mobile networks. In Communications, 2001. ICC
2001.
[52] IEEE International Conference on, volume 3, pages 857-861 vol.3, 2001.
[53] Z. Haas. A new routing protocol for reconfigurable wireless networks. In
Proceedings of the IEEE International
[54] Conference on Universal Personal Communications (ICUPC), pages 562–
565, Oct. 1997.
[55] Z. Haas. A new routing protocol for reconfigurable wireless networks. In
Proceedings of the IEEE International
[56] V. Tolety. Load reduction in ad hoc networks using mobile servers. Master’s
thesis, Colorado School of Mines,1999
[57] C. Chiang. Wireless Network Multicasting. PhD thesis, University of
California, Los Angeles, 1998.
[58] X. Hong, M. Gerla, G. Pei, and C. Chiang. A group mobility model for ad
hoc wireless networks. In Proceedings of the ACM International Workshop
on Modeling and Simulation of Wireless and Mobile Systems (MSWiM),
August 1999.
[59] M. Sanchez and P. Manzoni. Anejos: A java based simulator for ad-hoc
networks. Future Generation Computer Systems, 17(5):573–583, 2001.
[60] M. F. Shlesinger, J. Klafter, and Y. M. Wong, “Random walks with infinite
spatial and temporal moments,” J. Stat. Phys., vol. 27, pp. 499–512, 1982.
[61] McKee, Terry A.; McMorris, F. R. (1999), Topics in Intersection Graph
Theory, SIAM Monographs on Discrete Mathematics and Applications, 2,
Philadelphia: Society for Industrial and Applied Mathematics.
[62] Clark, Brent N.; Colbourn, Charles J.; Johnson, David S. (1990), "Unit disk
graphs", Discrete Mathematics 86 (1–3): 165–177.
[63] Vincent D. Blondel, Jean-Loup Guillaume, Renaud Lambiotte, Etienne
Lefebvre - Fast unfolding of communities in large networks (2008)
[64] Wei-jen Hsu, Kashyap Merchant, Haw-wei Shu, Chih-hsin Hsu, and Ahmed
Helmy. Weighted Waypoint Mobility Model and its Impact on Ad Hoc
Networks. EE Department and CS department, University of Southern
California.
[65] http://it.wikipedia.org/wiki/Radio_Frequency_IDentification
[66] An Introduction to Stochastic Modeling, Taylor, H. and S. Karlin, Academic
Press, NY, 1993.
[67] Dean J, Ghemawat S (2004) MapReduce: simplified data processing on
largeclusters. In Proceedings of Operating Systems Design and
Implementation(OSDI). San Francisco, CA. pp. 137–150.