User Manual- Autonomous Robotics

of 35
Transcript of User Manual- Autonomous Robotics
-
8/9/2019 User Manual- Autonomous Robotics
1/35
Innovians Technologies Autonomous Robotics User Manual
Address: C-56/11- 7thFloor, Sector-62, Noida, U.P., India-201301. Contact: 0120-4324129Email: [email protected] Web:www.innovianstechnologies.com
Innovians TechnologiesImplementing New Ideas & Technology
Organized ByInnovians Technologies
www.innovianstechnologies.com
Robotics Study Guide
Workshop on Autonomous Robotics
-
8/9/2019 User Manual- Autonomous Robotics
2/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Table of Content
1. Introduction ... 3
2. Introduction to Basic Electronics ... 42.1. Voltage & Current .. 4
2.2. Resistors .. 5
2.3. Capacitors 8
2.4. Inductors . 10
2.5. Diode . .11
3. Motors 14
4. Introduction to Motor Drivers. 14
4.1. H-Bridge ...14
4.2. L239D Dual H-Bridge Motor Driver ...15
5. Introduction to AVR Series (Atmega 8/8L) Microcontroller16
5.1. Features 16
5.2. Pin Diagram ..17
5.3. Block Diagram ..18
5.4. PIN Description 18
6. Type of Switches...19
7. Installation of required software applications...20
7.1. Installation of Code Vision AVR .21
7.2. Installation of USBASP Programmer Drivers 26
8. Atmega 8L Pin Configuration ..34
9. Microcontroller Board Diagram 35
-
8/9/2019 User Manual- Autonomous Robotics
3/35
-
8/9/2019 User Manual- Autonomous Robotics
4/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
2. Introduction to Basic Electronics
2.1. Voltageand Current
Voltage and Current are vital to understanding electronics, but they are quite hard to grasp because we
can't see them directly.
Voltage is the Cause, Current is the Effect
Voltage attempts to make a current flow, and current will flow if the circuit is complete. Voltage issometimes described as the 'push' or 'force' of the electricity, it isn't really a force but this may help you toimagine what is happening. It is possible to have voltage without current, but current cannot flow withoutvoltage.
Voltage and CurrentThe switch is closed making acomplete circuit so current can
flow.
Voltage but No CurrentThe switch is open so the circuit isbroken and current cannot flow.
No Voltage and No CurrentWithout the cell there is nosource of voltage so current
cannot flow.
Voltage, V
Voltage is a measure of the energy carried by the charge.
Strictly: voltage is the "energy per unit charge". The proper name for voltage is potential differenceor p.d.
for short, but this term is rarely used in electronics.
Voltage is supplied by the battery(or power supply).
Voltage is used up in components, but not in wires.
We say voltage acrossa component.
Voltage is measured in volts, V. Voltage is measured with a voltmeter, connected
in parallel.
The symbol Vis used for voltage in equations.
Current, I
Current is the rate of flow of charge.
Current is not used up, what flows into a component must flow out.
We say current througha component. Current is measured in amps (amperes), A.
Current is measured with an ammeter, connected in series.To connect in series you must break the circuit and put the ammeter acoss the gap, as shown inthe diagram.
The symbol Iis used for current in equations.
Connecting a voltmeter in parallel
-
8/9/2019 User Manual- Autonomous Robotics
5/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
2.2. Resistors
A resistor is a passivetwo-terminal electrical component that implementselectrical resistance as a circuit
element. Thecurrent through a resistor is in direct proportion to the voltage across the resistor's terminals.Thus, the ratio of the voltage applied across a resistor's terminals to the intensity of current through thecircuit is called resistance. This relation is represented by Ohm's law:
where I is the current through the conductor in units ofamperes,V is the
potential difference measured across the conductor in units of Volts, and R is the resistance of theconductor in units ofohms.
Electric current is simply the motion of electrons from one place to another through a wire. The moreelectrons that are flowing, the higher the current. Resistors have an apt name: They resist the electricalcurrent going through them. You can think of resistors as brakes for electrons. By controlling theelectrons going through a resistor, you can make a circuit do different things. Resistors may be the
primary building block of circuits, so you see them quite a bit in electronics projects. Here are some of the
things you can use them for:
Limiting current to another component: Some parts, such as light emitting diodes (LEDs), eatup current. Like a kid eats candy bars they try to gobble up as much as you give them. But LEDsrun into a problem they burn themselves out if they eat too much current. You can use a
resistor to limit the amount of current that reaches an LED. Reducing voltage to part of the circuit: In many circuits, you need to provide different voltages
to different parts of the circuit. You can do this easily with resistors. Two resistors joined, asFigure 4-1 shows you, form whats called a voltage divider. Assuming that you have twoidentical resistors, that is, they apply their brakes in the same amount, the voltage in between the
two is exactly half that of the rest of the circuit. Controlling the voltage/current going into another component: Combine a resistor and a
capacitor, for example, and you create a kind of hourglass timer. Or put a resistor at the input of atransistor to control how much the transistor amplifies a signal.
Protecting the inputs of sensitive components: Too much current destroys electroniccomponents. By putting a resistor at the input of a sensitive transistor or integrated circuit, youlimit the current that reaches that transistor or circuit. Although not foolproof, this simple
technique can save you a lot of time and money that you would lose fixing accidental blow-ups ofyour circuits.
Resistor Values
If resistors act like brakes, then you have to have some way to change how hard you push the pedal, inorder to have control over the flow of electrons. That control involves modifying the resistance of a
resistor. Electronics dabblers know the amount of resistance in a resistor as the ohm, typically representedby the Greek capitalized letter omega: . The higher the ohm value, the more resistance the componentprovides. To understand how you can adjust resistance, you should know that there are two basic types of
resistors, fixed and variable. Heres how they differ: A fixed resistor supplies a pre-determined resistance to current. Color coding identifies the value
of most fixed resistors. The color coding starts near the edge of the resistor and is comprised offour, five, and sometimes six bands of different colors.
A variable resistor, called a potentiometer, allows for the continual adjustment from virtually no
ohms to some maximum value. The potentiometer usually has the maximum value printed on it
http://en.wikipedia.org/wiki/Terminal_(electronics)http://en.wikipedia.org/wiki/Electrical_resistancehttp://en.wikipedia.org/wiki/Electric_currenthttp://en.wikipedia.org/wiki/Ampereshttp://en.wikipedia.org/wiki/Voltshttp://en.wikipedia.org/wiki/Ohmhttp://en.wikipedia.org/wiki/Ohmhttp://en.wikipedia.org/wiki/Voltshttp://en.wikipedia.org/wiki/Ampereshttp://en.wikipedia.org/wiki/Electric_currenthttp://en.wikipedia.org/wiki/Electrical_resistancehttp://en.wikipedia.org/wiki/Terminal_(electronics) -
8/9/2019 User Manual- Autonomous Robotics
6/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
somewhere. See the section Dialing with potentiometers, later in this chapter, for detailed infoon these puppies.
Resistor Colors
Understanding resistor tolerance
The last band of the resistor indicates its tolerance. Tolerance takes into account unavoidable
variations in resistor manufacturing. Though a resistor may have a 2,000 ohms marking, for
example, its actual value may be slightly higher or lower. You refer to the potential variation in
value as tolerance, expressed as a percentage (for example, +5-percent tolerance means the
resistor value may vary plus or minus 5 percent from the stated value). In most cases, being a
little off doesnt significantly affect the operation of the circuit. Knowing the tolerance of the
resistor lets you decide if a resistor is adequate for a particular circuit.
Resistor Heat and Power Resistors
Whenever electrons flow through something, they generate heat. The more electrons, the higher
the heat. Resistors also come rated by their power. Power is measured in wattsthe higher the
watts, the higher the heat. Electronic components can only stand so much heat (how much
depends on the size and type of component) before they sizzle into a charred mass. The power
rating tells you how many watts can safely go through the resistor. You calculate watts by using
this formula:
P = I x V
P stands for power, measured in watts; I represent the current, in amps, going through the
resistor; and V represents the voltage as measured across the resistor. For example, suppose that
the voltage is 5 volts, and 25 milliamps of current go through the resistor. To calculate watts,
multiply 5 by 0.025. You get 0.125, or 18 watt. Unlike the value in ohms, the component
seldom has the resistor wattage printed on it, either written out or as part of the color code.
Instead, you have to figure out the wattage by the size of resistor, or, if you know where you
bought the resistor, check with the manufacturer. Resistors that you use wattages than those
-
8/9/2019 User Manual- Autonomous Robotics
7/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
resistors that you use in low-current applications. The majority of resistors that you use for
hobby electronics are rated at 14 or even 18 watt. High -wattage resistors take many forms,
some of which you can see in Figure 4-3. Resistors over five watts commonly come encased in
epoxy or other waterproof and flameproof coating and have a rectangular, rather than
cylindrical, shape. Higher-wattage resistors may even include their own metal heat sink where
the fins help draw heat away from the resistor.
Variable Resistors
The variable resistor is a resistor whose value can be adjusted by turning a shaft or sliding acontrol. These are also called potentiometers or rheostats and allow the resistance of the deviceto be altered by hand. Variable resistors can be inexpensive single-turn types or multi-turn typeswith a helical element.
Some variable resistors can be fitted with a mechanical display to count the turns.Variable resistors can sometimes be unreliable, because the wire or metal can corrode or wear.Some modern variable resistors use plastic materials that do not corrode and have better wearcharacteristics.
Calculations
Power dissipation
The power dissipated by a resistor is the voltage across the resistor times the current through theresistor:
All three equations are equivalent, the last two being derived from the first by Ohm's
Law. The total amount of heat energy released per unit time is the integral of the power:
Series and parallel resistors
In a series configuration, the current through all of the resistors is the same, but the voltage across eachresistor will be in proportion to its resistance. The potential difference (voltage) seen across the network isthe sum of those voltages, thus the total resistance can be found as the sum of those resistances:
As a special case, the resistance of N resistors connected in series, each of the same resistance R, is givenby NR.Resistors in a parallel configuration are each subject to the same potential difference (voltage), howeverthe currents through them add. The conductances of the resistors then add to determine the conductanceof the network. Thus the equivalent resistance (Req) of the network can be computed:
http://en.wikipedia.org/wiki/File:Resistors_in_series.svg -
8/9/2019 User Manual- Autonomous Robotics
8/35
-
8/9/2019 User Manual- Autonomous Robotics
9/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Though they many sound complicated because of all the things that you can use them for, capacitors arereally very simple devices. The typical capacitor has two metal plates inside it. The plates dont touch.
Instead, a dielectric material, which is a fancy term for an insulator, separates the plates. The charge isstored at the surface of the plates, at the boundary with the dielectric. Because each plate stores an equal
but opposite charge, the total charge in the capacitor is always zero.
Capacitance of a capacitor
The capacitors capacitance (C) is a measure of the amount of charge (Q) stored on each plate for a givenpotential difference or voltage (V) which appears between the plates:
In SI units, a capacitor has a capacitance of one farad when one coulomb of charge causes a potentialdifference of one volt across the plates. Since the farad is a very large unit, values of capacitors are
usually expressed in microfarads (F), nanofarads (nF) or picofarads (pF). The capacitance isproportional to the surface area of the conducting plate and inversely proportional to the distance betweenthe plates. It is also proportional to the permittivity of the dielectric (that is, non-conducting) substancethat separates the plates.
Stored energy
As electric charge accumulates on the plates of a capacitor, a voltage develops across the capacitor due to
the electric field of the accumulated charge. Ever increasing work must be done against this everincreasing electric field as more charge accumulates. The energy (measured in joules , in SI ) stored in acapacitor is equal to the amount of work required to establish the voltage across the capacitor, and
therefore the electric field. The energy stored is given by:
where V is the voltage across the capacitor.
Capacitor networksA capacitor can be used to block the DC Current flowing within the circuit and therefore have important
applications in coupling of ac signals between amplifier stages, whilst preventing dc from passing.
Capacitors in a parallel: in this configuration each have the same potential difference (voltage). To find
their total equivalent capacitance (C):
Capacitor in Series: The current through capacitors in series stays the same, but the voltage across eachcapacitor can be different. The sum of the potential differences (voltage) is equal to the total voltage. To
find their total Capacitance:
One possible reason to connect capacitors in series is to increase the overall voltage rating. In practice, avery large resistor might be connected across each capacitor to divide the total voltage appropriately forthe individual ratings.
How to determine the value of capacitors with printed bodies
-
8/9/2019 User Manual- Autonomous Robotics
10/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Example: 151K = 15 X 10 = 150pF +/- 10%
Capacitor Types
Designers of electronic circuitry specify capacitors for projects by the dielectric material in
them. Some materials are better in certain applications: Just like bananas in a banana split, they
provide a better match. The most common dielectric materials are aluminum electrolytic,tantalum electrolytic, ceramic, mica, polypropylene, polyester (or Mylar), paper, and
polystyrene. If a circuit diagram calls for a capacitor of a certain type, you should be sure to get
one that matches. Table below lists the most common capacitor types, their typical value range,
and common applications.
2.4. Inductors
An inductor is a passive electrical device that stores energy in a magnetic field, typically by combining
the effects of many loops of electric current.
Physics of the inductor
Inductance is a physical characteristic of any system of conductors (including an inductor), which creates
a voltage proportional to the instantaneous rate of change in current flowing through it. The symbol L isused for inductance in honor of the physicist Heinrich Lenz. The SI unit of inductance is the Henry (H).
Energy
The energy (measured in joules, in SI) stored in an inductor is equal to the amount of work required to
establish the current flowing through the inductor, and therefore the magnetic field.
-
8/9/2019 User Manual- Autonomous Robotics
11/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
This is given by:
where I is the current flowing through the inductor.
Inductor networksInductors in a parallel configuration each have the same potential difference (voltage). To find
their total Equivalent inductance (Leq):
The current through inductors in series stays the same, but the voltage across each inductor can bedifferent. The sum of the potential differences (voltage) is equal to the total voltage. To find their total
Inductance:
2.5 Diodes
The diode is the simplest form of semiconductor. You use semiconductors in a circuit to control
the flow of electrons. A diode has two terminals, each with a high resistance to current in one
direction and low resistance to current in the opposite direction. Or put another way, diodes act
as a one-way valve for electrons. Electrons can go through the diode in one direction
but not in the other. A variety of applications use diodes and these diodes fall into numerous
subtypes.
Here is a list of the most common diodes:
Zener: These puppies limit voltage to a pre-determined amount. You can build a voltage
regulator for your circuit cheaply and easily with a zener diode.
Light-emitting diode (LED): All semiconductors emit infrared light when they conduct
current. LEDs emit visible light. Now available in all the colors of the rainbow.
Silicon-controlled rectifier (SCR): The SCR is a type of switch used to control AC or DC
currents. Theyre common in light dimmer switches.
Rectifier: This basic diode transforms (referred to as rectifying) AC current to provide
DC current only. (Remember: AC current alternates between both positive and negative values.
DC current does not alternate, and is only positive or negative. See Figure 4-6 for an example.)
Diodes are often referred to as rectifiers because they perform this rectifying function.
Bridge rectifier: This component consists of four diodes, connected one to the other to
form a kind of box shape; it rectifies AC to DC with maximum efficiency.
-
8/9/2019 User Manual- Autonomous Robotics
12/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Important ratings for diodes
Peak voltage and current: Except for zeners, diodes dont have values like resistors and
capacitors. A diode simply does its thing in controlling the flow of electrons. But that doesnt
mean all diodes are the same. Diodes are rated by two main criteria: peak inverse voltage (PIV)
and current. These criteria specify the kind of diode that you should use in a given circuit.
The PIV rating roughly indicates the maximum working voltage for the diode. For
example, if the diode is rated at 100 volts, you shouldnt use it in a circuit that applies more than
100 volts to the diode.
The current ratingis the maximum amount of current the diode can withstand. Assuming a
diode is rated for 3 amps, it cant safely conduct more than 3 amps without overheating and
failing.
Diodes are identified by an industry-standard numerical system. A classic example is the
1N4001 rectifier diode, which is rated at 1.0 PIV and 50 volts. A 1N4002 is rated at 100 volts, a
1N4003 is rated at 200 volts, and so on.
Anode and Cathode
All diodes have what amounts to positive and negative terminals. The terminals go by special
names: The positive terminal is called the anode, and the negative terminal is called the cathode.
You can readily identify the cathode end of a diode by looking for a red or black stripe near one
of the leads.
Figure below shows a diode with a stripe at the cathode end. This stripe corresponds with the
line in the schematic symbol for the diode. Its important that when you follow a schematic to
build a circuit you orient the diode with the line facing the specified way.
-
8/9/2019 User Manual- Autonomous Robotics
13/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Light-Emitting Diodes
If bright lights turn you on, you can appreciate the curious behavior of semiconductors: They
emit light when you apply an electric current to them. This light is generally very dim and only
in the infrared region of the electromagnetic spectrum. The light-emitting diode (LED), such as
the light that glows yellow or green when your computer is on, is a special type of
semiconductor expressly designed to emit copious amounts of light. Most LEDs are engineered
to produce red, yellow, or green visible light, but some special-purpose types emit infrared,
blue, and even white light.LEDs carry the same specifications as any other diode, but they usually havea pretty low
current rating. An LED has a PIV rating of about 100 to 150 volts, with a maximum currentrating of under 50 milliamps. If more current passes through an LED than its maximum ratingallows, the LED burns up.
Resistors, meet LEDs
You use a resistor, such as the one in Figure below, to limit the current to the LED. You select
the value of the resistor to maintain the current below the maximum current rating of the LED.
The calculation is simple, and for most LEDs and 5 or 12 volt circuits, you can use common
resistor values that get you in the right ballpark.
We list common resistor values in Table below. The values are selected based on the ratings of
most LEDs.
-
8/9/2019 User Manual- Autonomous Robotics
14/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
3. Motors
An electric motor is an electromechanical device that converts electrical energy into mechanical energy.
There are two types of motor:
1. AC Motors (Run on AC Electric Power).
2. DC Motors (Run on DC Electric Power).
4. Introduction to Motor Driver
Whenever a robotics hobbyist talk about making a robot, the first thing comes to his mind is
making the robot move on the ground. And there are always two options in front of the designer
whether to use a DC Motor or a stepper motor. When it comes to speed, weight, size, cost... DC
motors are always preferred over stepper motors. There are many things which you can do with
your DC motor when interfaced with a microcontroller. For example you can control the speed
of motor, you can control the direction of rotation, you can also do encoding of the rotation
made by DC motor i.e. keeping track of how many turns are made by your motors etc. So you
can see DC motors are no less than a stepper motor.
In this part of tutorial we will learn to interface a DC motor with a microcontroller. Usually H-
bridge is preferred way of interfacing a DC motor. These days many IC manufacturers have H-
bridge motor drivers available in the market like L293D is most used H-Bridge driver IC. H-
bridge can also be made with the help of transistors and MOSFETs etc. rather of being cheap,
they only increase the size of the design board, which is sometimes not required so using a
small 16 pin IC is preferred for this purpose.
4.1 H-Bridge
-
8/9/2019 User Manual- Autonomous Robotics
15/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
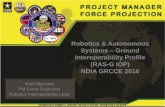
4.2 L293D Dual H-Bridge Motor Driver
L293 series of chips are power H-bridge motor drivers. The L293B and D have been used for
several years in many MIT robot controller boards, such as the 6.270 Rev 2.1 board and
miniboard. Unfortunately, they are often hard to find and usually can't be bought in single
quantity.
The L293B and D chips are both in 16-pins dip packages, and both have two h-bridge drivers.An H bridge is typically capable of running one DC motor bidirectional (forward, backwards,off), or two separate motors unidirectional (forward, off). Thus a L293 chip can run two motors
bidirectional, or 4 unidirectional.
L293 chips take logic-level inputs to direct the H-bridges, and have a separate pin for the motorsupply (which is often higher than the standard 5V logic supply).
The L293B and D chips have identical pinouts, but have two differences. The first is that the
L293D can run motors up to 600 ma, while the L293B can only run all the way up to 1 amp per
H-bridge. The other, and perhaps more important difference, is that the L293D has protection
diodes which shunt the current spikes produced by inductive loads (such as DC motors) whenthey are turned on or off (such as during the armature contact switching or pulse-width
modulation). The L293B has no such diodes, so the user must usually add his own. An
approach used on the MIT 6.270 board is to piggyback the two types of chips: the two give
about 1.6A, and the D chip has the protection diodes.
Interfacing
-
8/9/2019 User Manual- Autonomous Robotics
16/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Pin Diagram of L293D
5. Introduction to AVR Series (Atmega 8/8L) Microcontroller
5.1. Features
High-performance, Low-power AtmelAVR 8-bit Microcontroller Advanced RISC Architecture
130 Powerful InstructionsMost Single-clock Cycle Execution
32 8 General Purpose Working Registers
Fully Static Operation
Up to 16MIPS Throughput at 16MHz On-chip 2-cycle Multiplier
High Endurance Non-volatile Memory segments 8Kbytes of In-System Self-programmable Flash program memory
512Bytes EEPROM
1Kbyte Internal SRAM Write/Erase Cycles: 10,000 Flash/100,000 EEPROM Data retention: 20 years at 85C/100 years at 25C
Optional Boot Code Section with Independent Lock Bits In-System
Programming by On-chip Boot Program
True Read-While-Write Operation Programming Lock for Software Security
Peripheral Features
Two 8-bit Timer/Counters with Separate Prescaler, one Compare Mode
One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and Capture Mode
Real Time Counter with Separate Oscillator
Three PWM Channels
8-channel ADC in TQFP and QFN/MLF package Eight Channels
10-bit Accuracy
6-channel ADC in PDIP package Six Channels 10-
bit Accuracy
Byte-oriented Two-wire Serial Interface
-
8/9/2019 User Manual- Autonomous Robotics
17/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Programmable Serial USART
Master/Slave SPI Serial Interface
Programmable Watchdog Timer with Separate On-chip Oscillator On-chip Analog Comparator
Special Microcontroller Features
Power-on Reset and Programmable Brown-out Detection
Internal Calibrated RC Oscillator
External and Internal Interrupt Sources
Five Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down, and Standby I/O and Packages
23 Programmable I/O Lines 28-lead PDIP, 32-lead TQFP, and 32-pad QFN/MLF
Operating Voltages 2.7V - 5.5V (ATmega8L) 4.5V - 5.5V (ATmega8)
Speed Grades 0 - 8MHz (ATmega8L) 0 - 16MHz (ATmega8)
Power Consumption at 4Mhz, 3V, 25C
Active: 3.6mA
Idle Mode: 1.0mA
Power-down Mode: 0.5A
5.2.PIN DIAGRAM
-
8/9/2019 User Manual- Autonomous Robotics
18/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
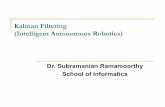
5.3.Block Diagram
5.4.Pin Description ATmega8/8L
VCC: Digital supply voltage. Magnitude of the voltage range between 4.5 to 5.5 V for the ATmega8 and2.7 to 5.5 V for ATmega8L.
-
8/9/2019 User Manual- Autonomous Robotics
19/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
GND: Ground. Zero reference digital voltage supply.
PORTB (PB7.. PB0): PORTB is a port I / O two-way (bidirectional) 8-bit with internal pull-up resistorcan be selected. This port output buffers have symmetrical characteristics when used as a source orsink. When used as an input, the pull-pin low externally will emit a current if the pull-up resistor isactivated it. PORTB pins will be in the condition of the tri-state when RESET is active, although the
clock is not running.
PORTC (PC5.. PC0):PORTC is a port I / O two-way (bidirectional) 7-bit with internal pull-up resistorcan be selected. This port output buffers have symmetrical characteristics when used as a source orsink. When used as an input, the pull-pin low externally will emit a current if the pull-up resistor isactivated it. PORTC pins will be in the condition of the tri-state when RESET is active, although the
clock is not running.
PC6/RESET: If RSTDISBL Fuse programmed, PC6 then serves as a pin I / O but with differentcharacteristics .. PC0 to PC5. If Fuse RSTDISBL not programmed, then serves as input Reset PC6. LOW
signal on this pin with a minimum width of 1.5 microseconds will bring the microcontroller into resetcondition, although the clock is not running.
PORTD (PD7.. PD0): PORTD is a port I / O two-way (bidirectional) 8-bit with internal pull-up resistorcan be selected. This port output buffers have symmetrical characteristics when used as a source or
sink. When used as an input, the pull-pin low externally will emit a current if the pull-up resistor isactivated it. PORTD pins will be in the condition of the tri-state when RESET is active, although theclock is not running.
RESET: Reset input pin. LOW signal on this pin with a minimum width of 1.5 microseconds will bring
the microcontroller into reset condition, although the clock is not running. Signal with a width of less than1.5 microseconds does not guarantee a Reset condition.
AVCC: AVCC is the supply voltage pin for the ADC, PC3 .. PC0, and ADC7 .. ADC6. This pin should
be connected to VCC, even if the ADC is not used. If the ADC is used, AVCC should be connected toVCC through a low-pass filter to reduce noise.
Aref: Analog Reference pin for the ADC.
ADC7 - ADC6: ADC analog input. There is only on ATmega8 with TQFP and QFP packages / MLF.
6. Types of Switches
Switches are essentially binary devices: they are either completely on ("closed") or completely off("open"). There are many different types of switches:
-
8/9/2019 User Manual- Autonomous Robotics
20/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
2
7. Installation of required software applications
7.1. Installation of Code Vision AVR
Please insert the Supplied CD to your CD ROM. You will found the following Item in the CD.
Double Click on the Software Folder.
Under Software Folder, double click on the Code Vision AVR Folder, then you will find 2 folder of 32-
Bit & 64-Bit. So based on the type of Operating System whether it is 32-Bit or 64-Bit O.S. then install theCode Vision AVR accordingly.
-
8/9/2019 User Manual- Autonomous Robotics
21/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
Double Click on the Setup File.
Then Follow the Steps:
-
8/9/2019 User Manual- Autonomous Robotics
22/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
23/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
24/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
25/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
26/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
7.2. Installation of USBASP Programmer drivers:Please navigate to the software folder then follow the steps below:
-
8/9/2019 User Manual- Autonomous Robotics
27/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
28/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
29/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
30/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
3
-
8/9/2019 User Manual- Autonomous Robotics
31/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
32/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
33/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
-
8/9/2019 User Manual- Autonomous Robotics
34/35
Innovians Technologies Autonomous Robotics Study GuideIn
[email protected] www.innovianstechnologies.com
8. ATMEGA 8L Pin Configuration
-
8/9/2019 User Manual- Autonomous Robotics
35/35
Innovians Technologies Autonomous Robotics Study GuideIn
9.Microcontroller Board Diagram