
URSI GA 2008
28
The New Digisonde: DPS-4D B Reinisch , I Galkin, G Khmyrov, K Bibl, I Lisysyan, A Kozlov, G Cheney, Y Luo, D Kitrosser, R Hamel, V Paznukhov, J Grochmal University of Massachusetts Lowell Environmental, Earth, & Atmospheric Sciences Department Center for Atmospheric Research The New Digisonde: DPS-4D B Reinisch , I Galkin, G Khmyrov, K Bibl, I Lisysyan, A Kozlov, G Cheney, Y Luo, D Kitrosser, R Hamel, V Paznukhov, J Grochmal University of Massachusetts Lowell Environmental, Earth, & Atmospheric Sciences Department Center for Atmospheric Research URSI GA 2008 Chicago 14 August 2008
Transcript of URSI GA 2008

The New Digisonde:
DPS-4DB Reinisch, I Galkin, G Khmyrov, K Bibl, I Lisysyan, A Kozlov, G Cheney, Y Luo,
D Kitrosser, R Hamel, V Paznukhov, J Grochmal
University of Massachusetts LowellEnvironmental, Earth, & Atmospheric Sciences Department
Center for Atmospheric Research
The New Digisonde:
DPS-4DB Reinisch, I Galkin, G Khmyrov, K Bibl, I Lisysyan, A Kozlov, G Cheney, Y Luo,
D Kitrosser, R Hamel, V Paznukhov, J Grochmal
University of Massachusetts LowellEnvironmental, Earth, & Atmospheric Sciences Department
Center for Atmospheric Research
URSI GA 2008Chicago 14 August 2008

umlcar.uml.eduURSI GA Chicago August 2008
High quality ionogramsReal time autoscaling and EDPsStandardized format of user data (SAOXML)Real time data disseminationRemote controlFlexibility for research and campaignsAnalysis software toolsLow transmit power for reduced RFIEase of maintenance
Important Issues for Ionosondes

umlcar.uml.eduURSI GA Chicago August 2008
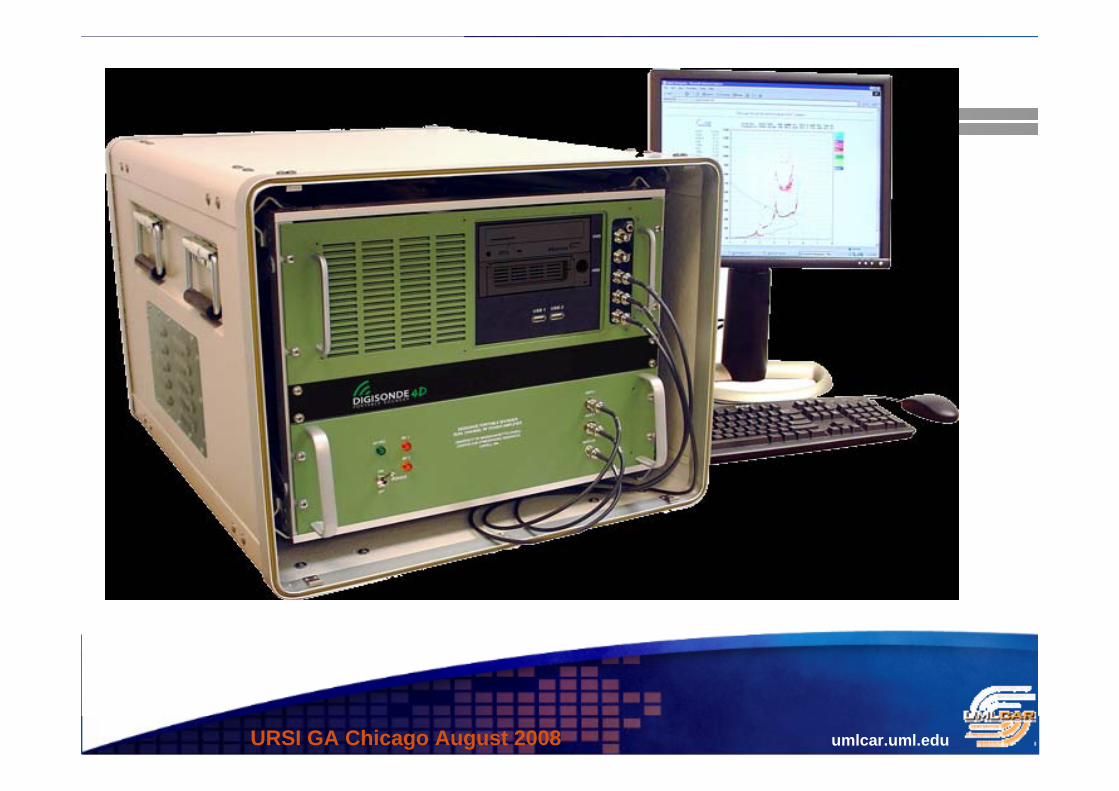
New Face of the DPS

umlcar.uml.eduURSI GA Chicago August 2008
History of the Digisonde Development
Starting in 1969Digisondes 128, 128P, 128PSDigisondes 256, including DISSDPSDPS-4D
Today: Majority of Digisondes report in real time data and EDPs to Data Centers like
Digital Ionogram Data Base “DIDBase” at UML World Data Center, Boulder → NOAA SPIDRWorld Data Center, London US AFWA → GAIMDIAS / COSTCOST 251 Vertical Incidence Sounding Database

umlcar.uml.eduURSI GA Chicago August 2008
Digisonde Network
4DHermanus
4D
4D
4D 4D
4D installations in 2008:

umlcar.uml.eduURSI GA Chicago August 2008
Hermanus, South Africa, 9 Aug 2008
Daytime
Courtesy L-A McKinnell
http://ulcar.uml.edu/DIDBase/
Courtesy L-A McKinnell

umlcar.uml.eduURSI GA Chicago August 2008
Summary of DPS Key Features
2x150 W low-power solid-state transmitters with half octave filters reduce RFICircular polarized transmission/reception identify O and X echoesFour-element receiving antenna array identifies angles of arrivalMultiple levels of DSP:
Spread spectrum transmissionPhase-coded waveform for pulse compressionDoppler spectrum analysis (2, 4, …, 128 pulse sequence)Precise radar range measurements with bi-frequency transmission
Remote commanding & real time data disseminationRemote diagnostic with Built-In-Test (BIT)ARTIST autoscaling and EDPs
umlcar.uml.eduURSI GA Chicago August 2008
DPS-4D Innovations (1)Digital transceiver technology
Superior accuracy, precision, and resolution of amplitude and phase measurements
• 16 bit ADCs and receivers• Improved angle of arrival processing• High resolution h’(f) in routine operation
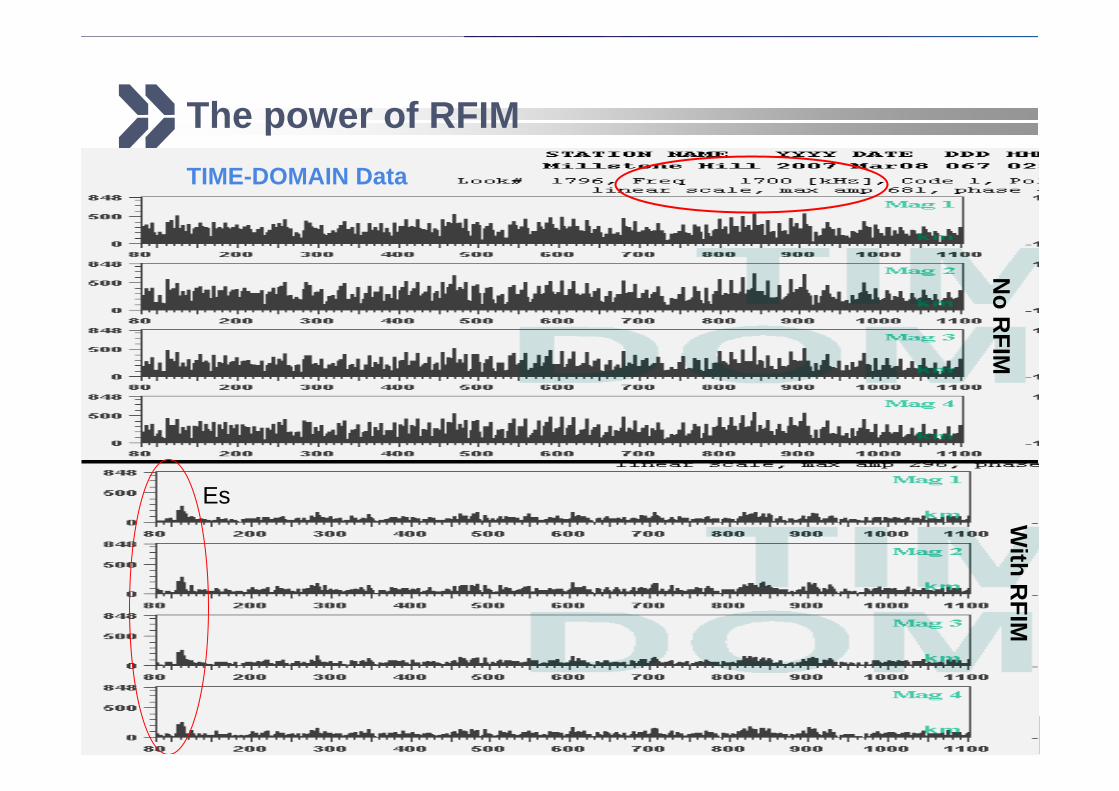
High speed interfaces between embedded processorsTime domain raw-data output for user processingNew RFI Mitigation technique improves SNR by up to 40 dBPassive mode for monitoring transmitters-of-opportunityFaster measurements (2-second ionograms)

umlcar.uml.eduURSI GA Chicago August 2008
Millstone Hill: 2-second ionograms,10 sec cadence

umlcar.uml.eduURSI GA Chicago August 2008
DPS-4D Innovations (2)New embedded software
Real-time operating system RTEMS • Superior clarity, reliability, scalability, quality control, and technical
support of the codeJava environment for online data processing
• Superior development tools and graphics libraries• Reusable code from and for other projects
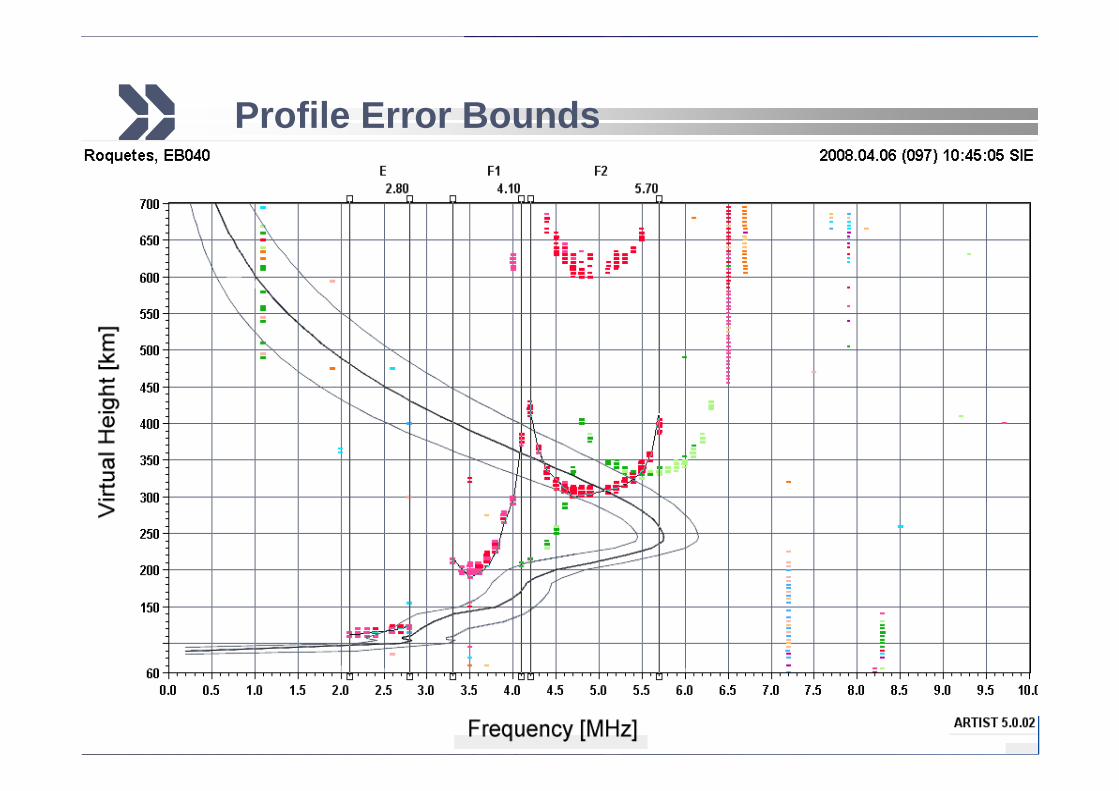
– SAO and Drift Explorers,– ARTIST- 5 with profile error bars, – DIDBase and Drift-Base
• Superior visualization, control, and debugging environment for DPS operations
– Data capture, replay for processing, interim data– Stepping through processing stages– Operational logs for troubleshooting
umlcar.uml.eduURSI GA Chicago August 2008
Profile Error Bounds

umlcar.uml.eduURSI GA Chicago August 2008
New Hardware
Transmitter/Timing 8-Channel Receiver Preprocessor
Four tracking bandpass filters CNTL and DATA computers
umlcar.uml.eduURSI GA Chicago August 2008
umlcar.uml.eduURSI GA Chicago August 2008
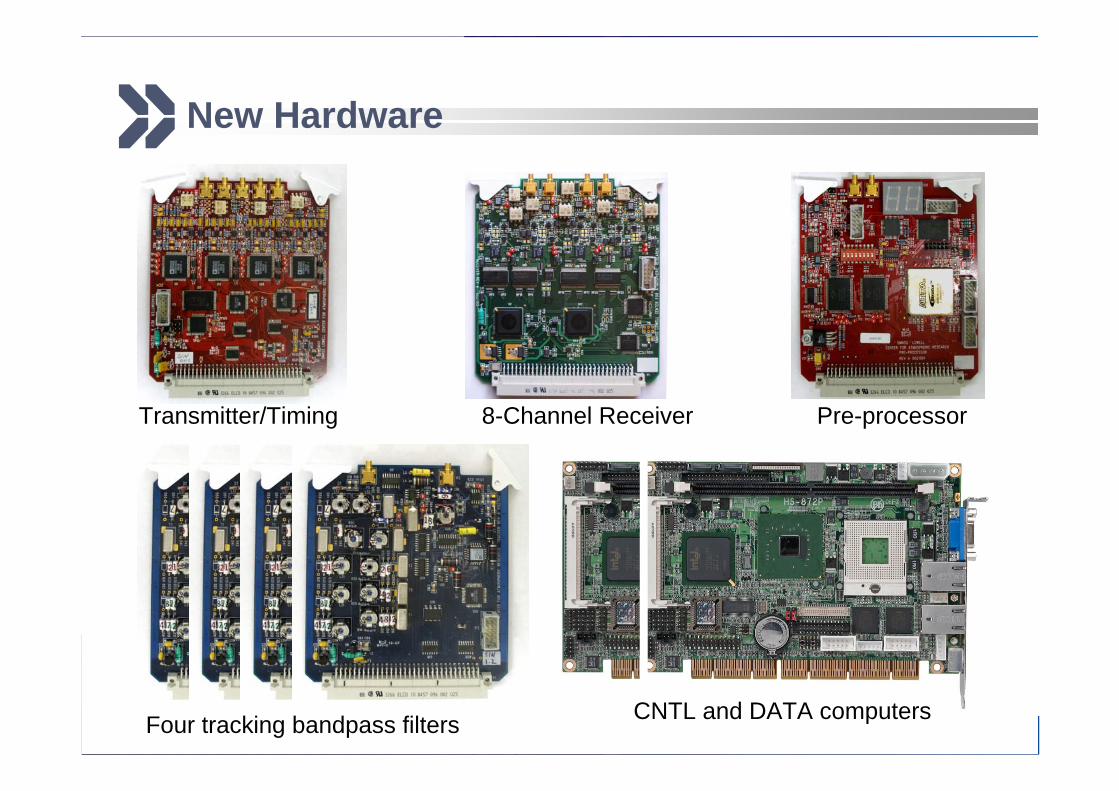
New Hardware
Transmitter/Timing 8-Channel Receiver Pre-processor
Four tracking bandpass filters CNTL and DATA computers

umlcar.uml.eduURSI GA Chicago August 2008
18:00 LT

umlcar.uml.eduURSI GA Chicago August 2008
One day atMillstone Hill15 April 2008

umlcar.uml.eduURSI GA Chicago August 2008
fN(h,t)fN(h,t)
The profiles for the same day

umlcar.uml.eduURSI GA Chicago August 2008
RF Interference Mitigation Algorithm RFIM(patented)
1. For strongest interferer: determine precisefrequency, amplitude, and phase
2. Subtract the interferer signal from input data3. Proceed with second strongest interferer4. Etc. …
~40 dB signal-to-noise enhancement
umlcar.uml.eduURSI GA Chicago August 2008
With R
FIMThe power of RFIM
No R
FIM
TIME-DOMAIN Data
Es
umlcar.uml.eduURSI GA Chicago August 2008
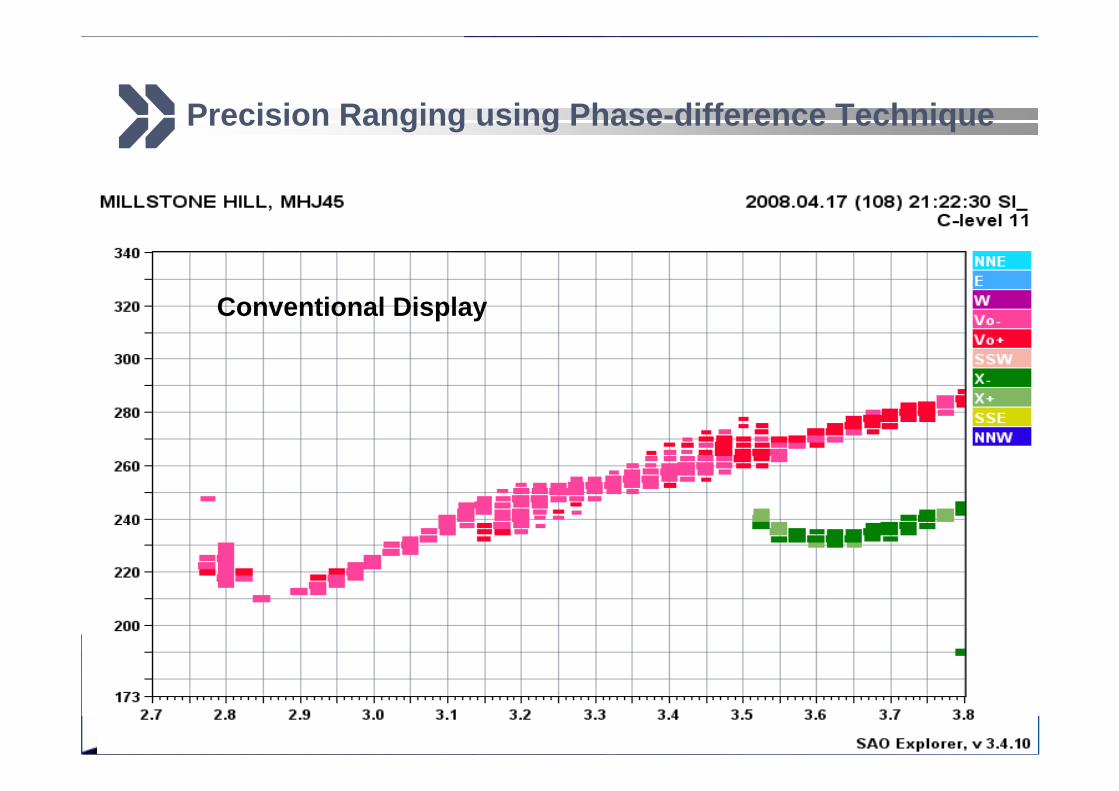
Precision Ranging using Phase-difference Technique
Conventional Display
umlcar.uml.eduURSI GA Chicago August 2008
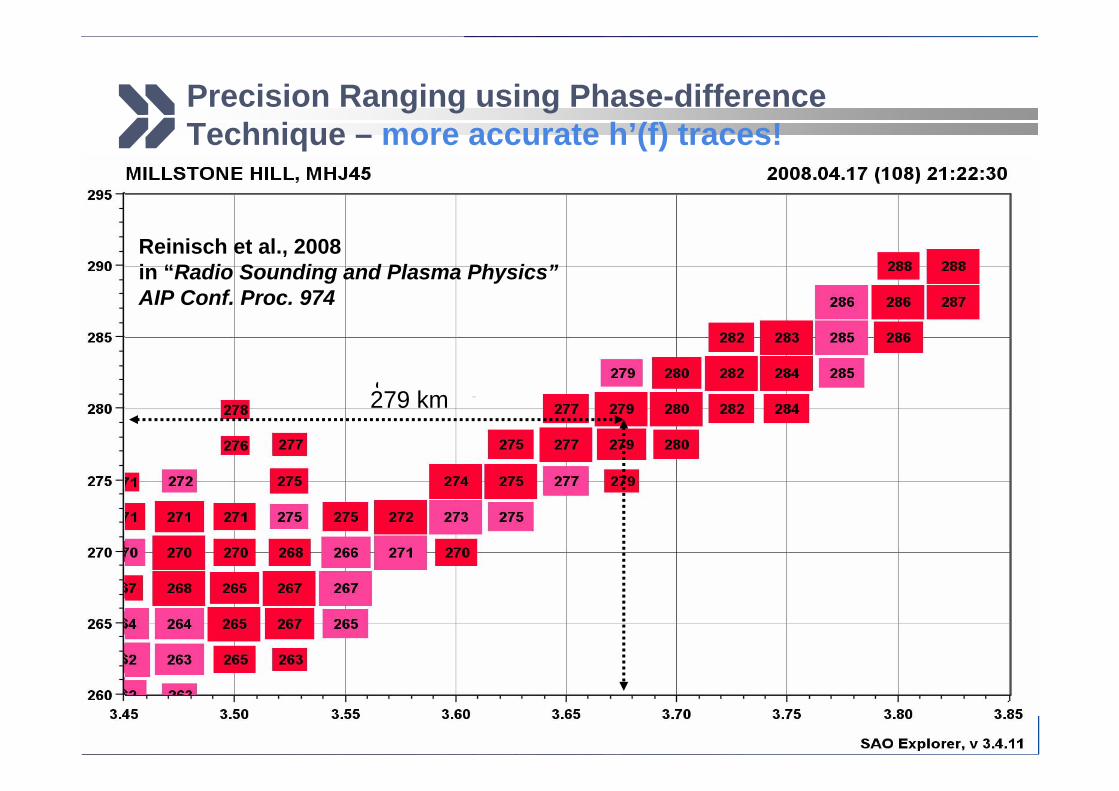
Precision Ranging using Phase-difference Technique – more accurate h’(f) traces!
( )( ) ( )( ) ( ) ( ) ( )
( )( ) ( )
( )( ) ( )
0
0
0
00
0
0
2 2 , ,
(Leibniz Theorem)
2 since , 0, and 0.
But ' . Therefore:
R
R
R
R
h
hh RrecRh
hrecRh
h
rec
d kdh n dh hd dhdh n h n hd d c d d
nd dhdh n hd c d
ndh h
dd
ω
ω
ω
ω
ωφ ω ω ω ωω ω ω ω ω
ωφ ωω ω ω
ωω
ωφ
⎡ ⎤∂ ⎛ ⎞ ⎛ ⎞= = + −⎢ ⎥⎜ ⎟ ⎜ ⎟∂ ⎝ ⎠⎢ ⎥⎝ ⎠⎣ ⎦
∂⎡ ⎤ ⎛ ⎞= = =⎢ ⎥ ⎜ ⎟∂ ⎝ ⎠⎣ ⎦∂
=∂
∫∫
∫
∫
( )
( ) ( ) ( )2 2
1 1
' '1 2
'
2 ' , or
2 2' , where ' '
4
rec i i
i rec
hc
d d h d h h h hd c c
chf
ω ω
ω ω ω
ω
ωω
φφ ω ω ω ω ω ωω
φπ
=
Δ = = = Δ < <
∴ = ΔΔ
∫ ∫
Reinisch et al., 2008 in “Radio Sounding and Plasma Physics”AIP Conf. Proc. 974
279 km Δφ4πch'
fΔ=

umlcar.uml.eduURSI GA Chicago August 2008
The effect of Precision Ranging (PR)
Classic Ionogram Display Ionogram Display with PR
umlcar.uml.eduURSI GA Chicago August 2008
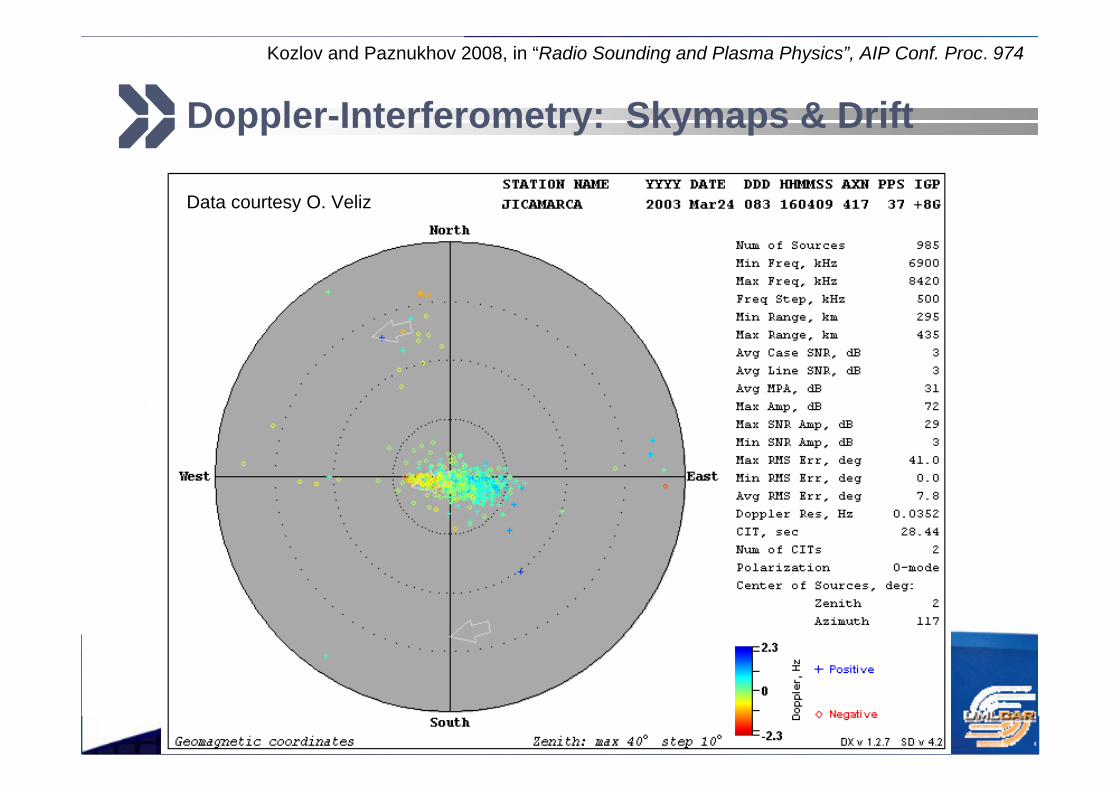
Doppler-Interferometry: Skymaps & Drift
Kozlov and Paznukhov 2008, in “Radio Sounding and Plasma Physics”, AIP Conf. Proc. 974
Data courtesy O. Veliz

umlcar.uml.eduURSI GA Chicago August 2008
One day atJicamarca
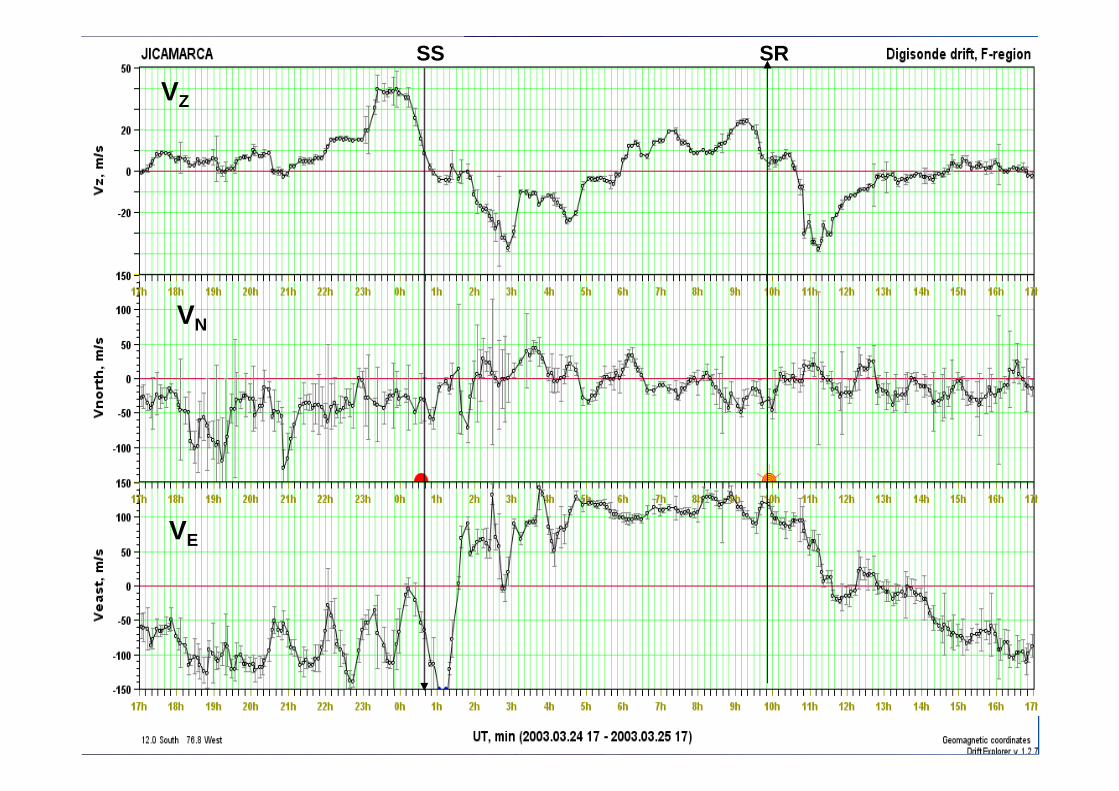
umlcar.uml.eduURSI GA Chicago August 2008
VZ (t), VN(t), VE(t) for same day
SS SR
VZ
VN
VE
umlcar.uml.eduURSI GA Chicago August 2008
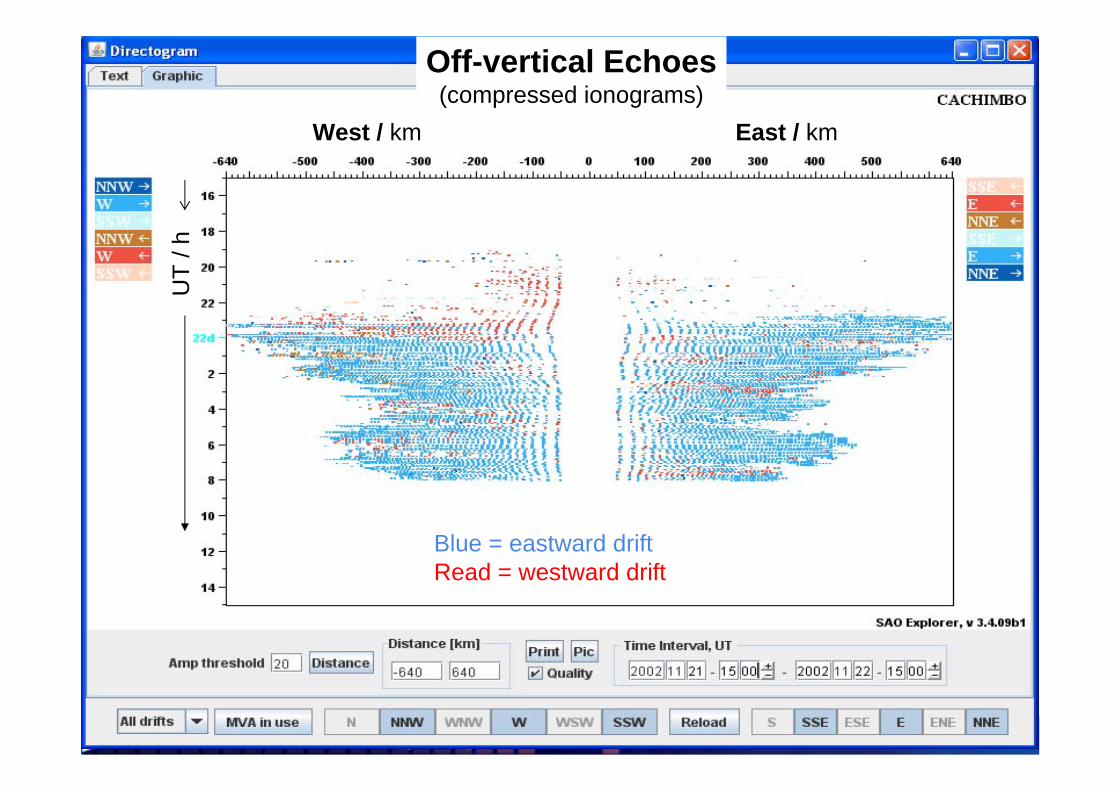
Time log of spread F occurence
West / km East / km
UT
/ h
Blue = eastward driftRead = westward drift
Off-vertical Echoes(compressed ionograms)

umlcar.uml.eduURSI GA Chicago August 2008
DPS-4D at Millstone Hill Receiving EISCAT Heater Signal
+/- 100 HzFourier Spectrum
umlcar.uml.eduURSI GA Chicago August 2008
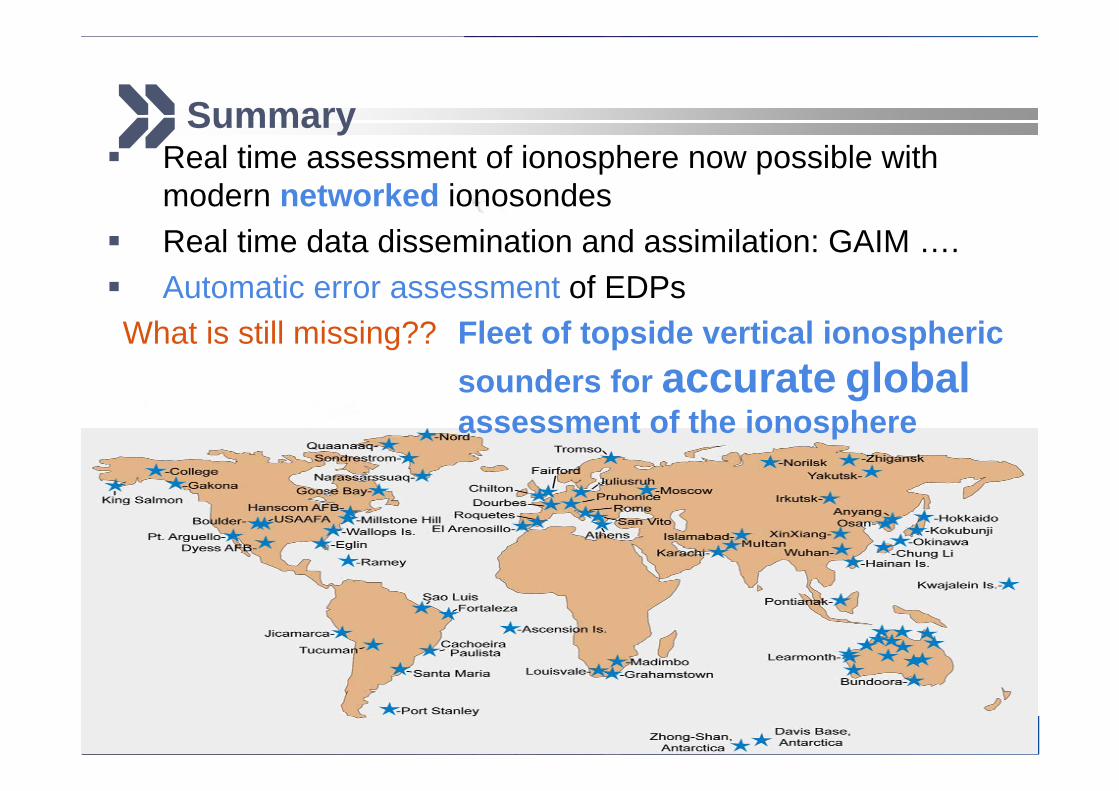
SummaryReal time assessment of ionosphere now possible with modern networked ionosondesReal time data dissemination and assimilation: GAIM ….Automatic error assessment of EDPs
Fleet of topside vertical ionospheric sounders for accurate globalassessment of the ionosphere
What is still missing??










![2016 URSI Asia-Pacific Radio Science Conference URSI AP ... · [Invited] Technical and Biological Electromagnetic Field Assessment for RF Safety Standard Regulation and Harmonization](https://static.fdocuments.us/doc/165x107/5ecd1646381ce046273d92f8/2016-ursi-asia-pacific-radio-science-conference-ursi-ap-invited-technical.jpg)







