UNIVERSITY of CALIFORNIAabsingh/Site/Publications_files/dissertation_UCSB_MA.pdfthe least, I thank...
74
UNIVERSITY of CALIFORNIA Santa Barbara Modeling host-parasitoid dynamics A Thesis submitted in partial satisfaction of the requirements for the degree Master of Arts in Ecology, Evolution and Marine Biology by Abhyudai Singh Committee in charge: Professor Roger M. Nisbet, Chair Professor William W. Murdoch Professor Bruce Kendall December 2007
Transcript of UNIVERSITY of CALIFORNIAabsingh/Site/Publications_files/dissertation_UCSB_MA.pdfthe least, I thank...

UNIVERSITY of CALIFORNIA
Santa Barbara
Modeling host-parasitoid dynamics
A Thesis submitted in partial satisfaction of the
requirements for the degree
Master of Arts
in
Ecology, Evolution and Marine Biology
by
Abhyudai Singh
Committee in charge:
Professor Roger M. Nisbet, Chair
Professor William W. Murdoch
Professor Bruce Kendall
December 2007

The dissertation of Abhyudai Singh is approved.
Professor William W. Murdoch
Professor Bruce Kendall
Professor Roger M. Nisbet, Committee Chair
December 2007

To my grandparents
iii

Acknowledgements
I would like to express my deepest appreciation to Roger Nisbet and Bill Murdoch
for their guidance and insight. I would also like to thank Joao Hespanha for
support without which this thesis would not have been possible. Last but not
the least, I thank my parents (Yatindra and Neeta Singh) and my wife (Swati
Singh). They have all been a great source of strength and inspiration all through
this work.
iv

Curriculum Vitæ
Abhyudai Singh
Abhyudai Singh was born in Allahabad, India, on December 3, 1979.
Education
2006 M.S. Mechanical Engineering, Michigan State University,
East Lansing.
2004 M.S. Electrical and Computer Engineering, Michigan State
University, East Lansing.
2002 B.Tech. Mechanical Engineering, Indian Institute of Tech-
nology, Kanpur, India.
Experience
2004–present Research Assistant, University of California, Santa Barbara.
2003-2004 Research Assistant, Michigan State University, East Lans-
ing.
2002–2003 Teaching Assistant, Michigan State University, East Lans-
ing.
Selected Publications
A. Singh, R. Mukherjee, K. Turner and S. Shaw. MEMS Implementation of
Axial and Follower End Forces. Journal of Sound and Vibration, 286, 637–644,
2005.
v

A. Singh and H. K. Khalil. Regulation of Nonlinear Systems Using Conditional
Integrators. International Journal of Robust and Nonlinear Control, 15, 339-362,
2005.
J. P. Hespanha and A. Singh. Stochastic Models for Chemically Reacting Sys-
tems Using Polynomial Stochastic Hybrid Systems. International Journal of Ro-
bust and Nonlinear Control, 15, 669-689, 2005.
A. Singh and J. P. Hespanha. Lognormal Moment Closures for Chemically
Reacting Systems. In Proc. of the 45th IEEE Conference on Decision and Control,
San Diego, 2006.
A. Singh and R. M. Nisbet. Semi-discrete Host-Parasitoid Models. Journal of
Theoretical Biology, 247, 733-742, 2007.
A. Singh and J. P. Hespanha. A Derivative Matching Approach to Moment
Closure for the Stochastic Logistic Model. Bulletin of Math Biology, 69, 1909-
1925, 2007.
A. Singh and J. P. Hespanha. Stochastic Analysis of Gene Regulatory Networks
Using Moment Closure. In Proc. of the 2007 American Control Conference, New
York, 2007.
vi

Abstract
Modeling host-parasitoid dynamics
by
Abhyudai Singh
Arthropod host-parasitoid interactions constitute a very important class of con-
sumer resource dynamics. Discrete-time models, starting from the seminal work
of Nicholson and Bailey are a tradition for such interactions. Although the classic
Nicholson-Bailey model predicts an unstable equilibrium, host-parasitoid popula-
tion are often observed to be stable in nature and a fundamental area of research
in population ecology is to elucidate mechanisms that can account for this sta-
bility. This thesis investigates some of these mechanisms and is divided into two
parts. The first part of the thesis introduces a semi-discrete approach to modeling
host-parasitoid populations. This approach takes account of the various within-
generation dynamics by modeling them in continuous-time, while still modeling
reproduction as a discrete event. Using this formalism, results connecting the
stability of the host-parasitoid interaction with different forms of density depen-
dence and the form of the functional response are derived. The latter results
contradict previous conclusions from heuristically formulated models, and illus-
trate the need for such a semi-discrete approach in discrete-time host-parasitoid
theory.
The second part of the thesis investigates how variation in the risk of parasitism
among individual hosts can stabilize the Nicholson-Bailey model equilibrium. The
vii

famous “CV 2 > 1” rule states that this equilibrium can be stabilized if there is
sufficient variation in risk. Analysis in this thesis show that this is not a general
result. Instead, unless risk is gamma-distributed across hosts, and except for host
reproduction rates close to 1, it is the shape of the distribution of risk among
hosts that determines stability. For unconditional stability, the distribution must
be skewed, with a modal risk of zero. If the distribution of risk does not have this
appropriate shape then even infinite coefficient of variation (CV ) cannot stabilize
the equilibrium for certain values of host reproduction rates.
viii

Contents
Acknowledgements iv
Curriculum Vitæ v
Abstract vii
List of Figures xi
1 Semi-discrete host-parasitoid dynamics 1
1.1 Model Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Effects of Functional Responses . . . . . . . . . . . . . . . . . . . 6
1.2.1 Quadratic Functional Responses . . . . . . . . . . . . . . . 7
1.2.2 Higher Order Functional Responses . . . . . . . . . . . . . 8
1.2.3 Type II and III Functional Responses . . . . . . . . . . . . 10
1.3 Effects of Density Dependence . . . . . . . . . . . . . . . . . . . . 11
1.3.1 Density Dependent Host Mortality . . . . . . . . . . . . . 11
1.3.2 Density Dependent Parasitoid Mortality . . . . . . . . . . 17
1.4 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 Stability in host-parasitoid models due to variability in risk 22
2.1 Nicholson-Bailey model with variability in host risk . . . . . . . . 23
2.2 Stability, shape of the risk distribution and the CV 2 rule . . . . . 26
2.2.1 Risk has an inverse gaussian distribution . . . . . . . . . . 28
ix

2.2.2 Risk is bounded from below . . . . . . . . . . . . . . . . . 29
2.2.3 Unexpected patterns among stability, R and CV 2 . . . . . 32
2.2.4 Skewed risk, parasitoid efficiency, and host suppression . . 33
2.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.3.1 What the field biologist should measure . . . . . . . . . . . 36
2.3.2 Stability and within-generation dynamics . . . . . . . . . . 39
Bibliography 42
A Semi-discrete host-parasitoid models 47
A.1 Appendix : Stability Analysis for Quadratic functional responses . 47
A.2 Appendix : Stability Analysis for Higher Order Functional Responses 48
A.3 Appendix : Stability Analysis for Type II and III Functional Re-sponses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
B Stability in host-parasitoid models due to variability in risk 51
B.1 Appendix : Stability analysis for host-parasitoid models . . . . . 51
B.2 Appendix : Stability condition in terms of distribution of risk . . 53
B.2.1 Stability for small values of R . . . . . . . . . . . . . . . . 54
B.2.2 Stability for large values of R . . . . . . . . . . . . . . . . 55
B.3 Appendix : Stability Analysis for host-parasitoid when risk is in-verse gaussian distributed . . . . . . . . . . . . . . . . . . . . . . 58
B.4 Appendix : Stability Analysis for host-parasitoid when risk isbounded from below . . . . . . . . . . . . . . . . . . . . . . . . . 59
B.5 Appendix : Parasitoid efficiency . . . . . . . . . . . . . . . . . . . 60
B.6 Appendix : Stability Analysis in terms of distribution of fractionparasitized . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
B.6.1 Stability for small values of R . . . . . . . . . . . . . . . . 61
B.6.2 Stability for large values of R . . . . . . . . . . . . . . . . 61
x

List of Figures
1.1 Life cycle of the Host in year t. . . . . . . . . . . . . . . . . . . . 4
1.2 Plots of the fraction of host larvae escaping parasitism f as a func-tion of host density Ht, as given by (1.14) (dashed line, functionalresponse is a function of the current host larvae density) and (1.16)(solid line, functional response is a function of the initial host lar-vae density) for R = 2, T = 1, c = .01, m = 1 and Pt = 1. . . . . . 9
1.3 The stability region specified in (1.27), for the discrete-time model(1.23) as a function of strength of density-dependent mortality vs.parasitism (c1/kc) and R (the number of viable eggs produced byeach adult host). The no-parasitoid equilibrium refers to (1.24)while the host-parasitoid equilibrium refers to (1.26). . . . . . . . 14
1.4 Plot of host and parasitoid equilibrium densities as a function ofthe strength of density-dependent mortality (c1). Other parameterwere taken as R = 2, T = 1, k = 1 and c = 1. H∗ and P ∗ refer tothe host-parasitoid equilibrium (1.26) and H∗
NC refers to the no-parasitoid equilibrium given by (1.24). The solid and dashed linescorrespond to stable and unstable equilibrium densities, respectively. 15
1.5 Population densities of hosts and parasitoids in year t as givenby the discrete-time model (1.23). Parameters taken as R = 2,c1 = .01, k = 1, T = 1 and a) c = .05, b) c = .02 and c) c = .0125which correspond to values below, in and above the stable region(1.27), respectively. Initial densities are 20 and 30 for the host andparasitoid respectively. . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1 Gamma distribution with mean one and CV 2 = .5 (dotted line),CV 2 = 1 (dashed line), CV 2 = 3 (solid line) . . . . . . . . . . . . 27
xi

2.2 Inverse gaussian distribution with mean one and CV 2 = 1 (dashedline), CV 2 = 3 (solid line) . . . . . . . . . . . . . . . . . . . . . . 29
2.3 Gamma distribution with mean one and CV 2 = 1 shifted to theright by 0.1 (c∗ = 0.1). . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 Region of stability for the discrete-time model (2.9) when g(x) isa gamma distribution with mean 1 (c = 1) c∗ = 0.05 and c∗ = 0.1. 31
2.5 Parasitoid efficiency defined as ln(R)P ∗ where P ∗ denotes the para-
sitoid equilibrium density as a function of host rate of increase fordifferent distributions of risk : 1) No variability in risk (Nicholson-Bailey model). All host have risk equal to 1. 2) Risk has a gammadistribution with mean 1 and variance 0.5. 3) Risk has an inversegaussian distribution with mean 1 and variance 2. 4) Risk has agamma distribution with mean 1 and variance 2. Solid lines anddashed lines represent stable and unstable host-parasitoid equilib-rium, respectively . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6 Adult host equilibrium as a function of host rate of increase fordifferent distributions of risk. See caption of Figure 2.5 for moredetails. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
xii

Chapter 1
Semi-discrete host-parasitoid
dynamics
One of the central themes in ecology is the interaction between populations of
consumers (e.g. predators, parasitoids) and resources (e.g. prey, host). There is
a large body of literature that studies such interactions using two well developed
approaches: continuous-time models, which are used to model populations with
overlapping generations and all year round reproduction, and discrete-time mod-
els, which are more suited for populations which reproduce in a discrete pulse
determined by season [27].
A large body of theory has focused on the dynamics of arthropod host-
parasitoid systems, dating back to the seminal work of Nicholson and Bailey
[33]. Reviews can be found in [16] and [27]. Discrete-time models are the tradi-
tional framework used, a choice that reflects the univoltine life histories of many
temperate-region insects. In such systems the host species is usually vulnerable
1

to a particular parasitoid species at only one stage of its life cycle, commonly
the larval stage. One common life cycle involves adult hosts that emerge during
spring or summer, lay eggs and then die. The eggs mature into larvae and for
a short interval of time are vulnerable to attack by the parasitoids. Surviving
host larvae pupate, overwinter in the pupal stage, and emerge as adult hosts the
following year. Adult parasitoids search for hosts during the window of time
that host larvae are present, then die. Parasitized hosts mature into a juvenile
parasitoid, pupate, overwinter, and emerge as adults the following year. Syn-
chronized life cycles, little overlap of life stages, and no overlap of generations in
both hosts and parasitoids suggest that discrete-time models are appropriate for
these systems.
The updating function in a discrete-time, host-parasitoid model relates the
population densities at a fixed date in one year to those at the same date in
the previous year, and describes the cumulative effect of all the processes that
have occurred with in the year. However, life processes are continuous, and
the form taken by this cumulative effect may be far from intuitive, especially
where multiple processes operate simultaneously. A systematic way to formulate
the updating function is presented in Box 4.1 of [27], and involves a hybrid
approach, where the continuous processes involved in the within-year dynamics
are described by a continuous-time model, and reproduction is modeled as a
discrete event. We follow [35], and call such models semi-discrete.
Semi-discrete models have previously been used to investigate interactions
between adults and juveniles within a season with discrete between-season dy-
namics [11], to model systems where a host or resource has discrete generations
and is attacked by a consumer with non-seasonal dynamics (e.g. [8, 3, 5]), and
2

systems with discrete consumer generations and very fast resource dynamics [12].
Semi-discrete models have also been used to address specific questions relating
to host-parasitoid dynamics; for example the stabilizing effects of within-season
movement of parasitoids (e.g. [37]), and the consequences of phenological asyn-
chrony between parasitoids and their hosts [25, 13]. However, the main body of
discrete-time, host-parasitoid theory does not take advantage of this formalism.
In this paper we revisit discrete-time host-parasitoid theory using semi-discrete
models. We derive new results relating stability to the form of the functional re-
sponse, and to different forms of density dependence. Some previous conclusions
from heuristically formulated models survive, but others are contradicted, notably
those relating the form of the functional response to stability. Our approach can
easily be extended to include more complex biological interactions in contexts
where a number of processes can occur concurrently.
1.1 Model Structure
A general model describing host-parasitoid dynamics in discrete-time is given
by
Ht+1 = F (Ht, Pt) (1.1a)
Pt+1 = G(Ht, Pt) (1.1b)
where Ht and Pt are the adult host and adult parasitoid densities, respectively,
at a fixed date near the start of year t (where t is an integer). The host life cycle
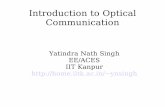
is illustrated in Figure 1.1 where Ht adult hosts give rise to eggs which mature
into RHt host larvae at the start of the vulnerable stage. Here R > 1 denotes
3

the number of viable eggs produced by each adult host. The time within the
vulnerable larvae stage is denoted by τ which varies from 0 to T corresponding to
the start and end of the the vulnerable stage, respectively. The update functions
Pupae Adult Egg Larvae Pupae
τ=0 τ=T
H tStart of year t End of year t
R H t
Figure 1.1. Life cycle of the Host in year t.
F , G are obtained by first writing a continuous-time model that describes the
various continuous-mortality sources that occur during the vulnerable stage of
the host and is given by the following system of ordinary differential equations
dL(τ, t)
dτ=− g1[L(τ, t), P (τ, t), I(τ, t)]P (τ, t)L(τ, t) (1.2a)
− g2[L(τ, t), P (τ, t), I(τ, t)]L(τ, t) (1.2b)
dP (τ, t)
dτ=− g3[L(τ, t), P (τ, t), I(τ, t)]P (τ, t) (1.2c)
dI(τ, t)
dτ=g1[L(τ, t), P (τ, t), I(τ, t)]P (τ, t)L(τ, t)− g4[L(τ, t), P (τ, t), I(τ, t)]I(τ, t),
(1.2d)
where P (τ, t), L(τ, t) and I(τ, t) are the density of parasitoids, un-parasitized and
parasitized host larvae, respectively, at a time τ within the vulnerable stage in
year t. For convenience of presentation, in the rest of the paper we suppress the
dependence on τ and t and represent the above differential equations by
dL
dτ= −g1LP − g2L,
dP
dτ= −g3P,
dI
dτ= g1LP − g4I. (1.3)
The functions g2, g3 and g4 represent (potentially density-dependent) host mor-
tality due to causes other than parasitism, parasitoid mortality, and mortality of
4

the parasitized larvae, respectively. The function g1 is the (potentially density-
dependent) attack rate of the parasitoids. The product g1L is frequently referred
to as the functional response and represents the instantaneous rate at which hosts
are attacked per parasitoid in the population. The above set of ordinary differ-
ential equations are then integrated starting from τ = 0 with initial conditions
L(0, t) = RHt, P (0, t) = Pt, I(0, t) = 0, (1.4)
up to τ = T . Assuming that each parasitized host larvae gives rise to k adult
parasitoids in the next generation, the update functions can be obtained as
F (Ht, Pt) = L(T, t) (1.5a)
G(Ht, Pt) = kI(T, t). (1.5b)
The stability analysis for the resulting discrete-time model can then be investi-
gated using the standard Jury conditions [10].
If g2 = g4 = 0, i.e. host larvae mortality is solely through parasitism and there
is no parasitized host mortality, then from (1.2) we have that L(τ, t) + I(τ, t) is
constant throughout the vulnerable period and is equal to RHt. In that case the
model (1.1) takes the more familiar form
Ht+1 = RHtf(Ht, Pt) (1.6a)
Pt+1 = kRHt[1− f(Ht, Pt)] (1.6b)
where
f(Ht, Pt) :=F (Ht, Pt)
RHt
(1.7)
denotes the fraction of host larvae that escape parasitism and is calculated from
the solution of the system (1.2) of differential equations.
5

1.2 Effects of Functional Responses
If the attack rate g1 is assumed to be a constant c, implying a linear functional
response, and if g2 = g3 = g4 = 0, then integrating the corresponding continuous-
time model leads to the classic Nicholson-Bailey model with
f(Ht, Pt) = exp (−cTPt), (1.8)
in the discrete-time model (1.6) [Box 4.1, [27]]. A typical population time se-
ries of this model is as follows: at low densities of hosts and parasitoids both
the populations grow, when the population of hosts becomes large enough the
parasitoid begins to overexploit the host leading to a crash of the host popu-
lation, followed by a crash of the parasitoids. Such cycles of over exploitation
and crashes make this interaction unstable and both hosts and parasitoids show
diverging oscillations. Various authors have investigated Type II [36] and Type
III functional responses [17] with the conclusion that they do not stabilize such
discrete generation host-parasitoid populations. They did this by assuming that
the attack rate is a function of the initial host larvae density. For example, for a
Type II functional response, it was taken as
g1 =c
1 + L(0,t)LH
=c
1 + RHt
LH
(1.9)
for some constants c and LH . By contrast, our semi-discrete model recognizes
that in a real system, the number of hosts larvae declines throughout the vulner-
able period due to attack by the parasitoids. Thus it is assumed that the attack
rate is a function of L(τ, t), the current host larvae density instead of L(0, t). We
illustrate next, using a simple class of functional responses which have the form
cLm+1, that the within season variation in host density can change the qualitative
6

dynamics from instability to stability. These accelerating functional responses are
mathematically easy to analyze and provide insight on host-parasitoid interac-
tions for the more complicated Type III functional response which we investigate
in Section 1.2.3. We begin by considering quadratic functional responses.
1.2.1 Quadratic Functional Responses
We consider the dynamical interaction
dL
dτ= −cL2P,
dI
dτ= cL2P,
dP
dτ= 0, (1.10)
i.e. g1 = cL, g2 = 0, g3 = 0 and g4 = 0 which incorporates a quadratic functional
response. The solution to the above continuous-time model is
L(τ, t) =RHt
1 + cRHtPtτ, P (τ, t) = Pt, I(τ, t) = RHt − L(τ, t) (1.11)
which yields the following function f(Ht, Pt) in the discrete-time model (1.6)
f(Ht, Rt) =L(T, t)
RHt
=1
1 + cTRHtPt
. (1.12)
Stability analysis of the model (see Appendix A.1) reveals that the equilibrium
point
H∗ =1√
kTRc, P ∗ = k(R− 1)H∗ (1.13)
is neutrally stable with a period of 2π/ arctan(√
R2 − 1) for small amplitude
oscillations. Thus, the cycle period is very long when R is only slightly greater
than one (the minimum value for viable populations), drops to six for R = 2, and
asymptotically approaches a four year period of oscillation with increasing R.
The neutrally stability persists if we add a background density-independent
parasitoid mortality, i.e, g3 = c1. We obtain the same form for the function f as
7

(1.12) with cT being replaced by c[1 − exp(−c1T )]/c1. This does not affect the
above neutral stability result which holds independent of c.
1.2.2 Higher Order Functional Responses
We now consider a generalization of the above model by taking the functional
response to be cLm+1 with m > 0, i.e. g1 = cLm. Using similar analysis to that
above, we obtain
f(Ht, Rt) =1
[1 + cTm(RHt)mPt]1m
, (1.14)
and the following equilibrium densities
H∗ =
(Rm − 1
cTkmRm(R− 1)
)1/(m+1)
, P ∗ = k(R− 1)H∗. (1.15)
In Appendix A.2 we show that functional response of the form cLm+1 can stabilize
the host-parasitoid interaction for m > 1.
It is instructive to contrast this result with previous work [36, 17] where
functional responses were incorporated by assuming that the attack rate g1 is
a constant and equal to cL(0, t)m = c(RHt)m, i.e. a function of only the ini-
tial number of host larvae available. Such an assumption does not prevent the
parasitoids from overexploiting the hosts as a large initial host density leads to
a high attack rate throughout the vulnerable stage in spite of the fact that the
host population has been reduced to low levels towards the end of the stage. Not
surprisingly, the equilibrium of the corresponding discrete-time model given by
f = exp[−cT (RHt)mPt] (1.16)
is unstable for all m ≥ 0. The difference between this function and the one
obtained from a semi–discrete model (equation (1.14)) is illustrated in Figure
8

1.2. Note the larger values of f obtained from the semi–discrete approach, i.e.
more host larvae escaping parasitism when Ht is large as compared to (1.16). This
is simply because the semi-discrete approach takes into account that the attack
rate is not a constant but decreases with the host larval densities throughout the
vulnerable period. This leads to a larger host population escaping parasitism and
prevents overexploitation, which contributes to the stability of the semi–discrete
model.
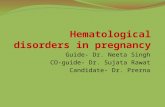
Figure 1.2. Plots of the fraction of host larvae escaping parasitism f as a function
of host density Ht, as given by (1.14) (dashed line, functional response is a func-
tion of the current host larvae density) and (1.16) (solid line, functional response
is a function of the initial host larvae density) for R = 2, T = 1, c = .01, m = 1
and Pt = 1.
9

1.2.3 Type II and III Functional Responses
Changing the attack rate to
g1 =c(
LLH
)m
1 +(
LLH
)m+1 (1.17)
with m ≥ 1 incorporates a sigmoidal functional response with maximal value
cLH . Analysis in Appendix A.3 shows that this yields the implicitly defined
discrete-time model
Ht+1 −Lm+1
H
mHmt+1
= RHt −Lm+1
H
m(RHt)m− cTLHPt (1.18a)
Pt+1 = k(RHt −Ht+1) (1.18b)
with the following equilibrium densities.
H∗ = LH
(Rm − 1
mRm(R− 1)(kcTLH − 1)
) 1m+1
, P ∗ = k(R− 1)H∗, kcTLH > 1.
(1.19)
The product cTLH represents the number of hosts parasitized per parasitoid
during the entire larval stage when the host larvae densities are large. Hence,
the above equilibrium is only feasible if the population of parasitoids can grow,
i.e. their reproductive rate (kcTLH ) is larger than one, when a large number of
hosts are available.
The equilibrium in the above discrete-time model is stable for m∗ < m where
constant m∗ is the solution to
Rm∗m∗
Rm∗ − 1=
kcTLHR− 1
(kcTLH − 1)(R− 1)(1.20)
and has a value greater than one. If kcTLh >> 1 then m∗ ≈ 1 and if R >> 1
then m∗ ≈ kcTLH/(kcTLH − 1). From the above analysis we conclude that a
10

Type III functional response can stabilize a host-parasitoid interaction as long
as the initial portion of the functional response accelerates sufficiently strongly.
Also, as m∗ is always greater than one, a Type II functional response, which
would correspond to m = 0, will lead to an unstable equilibrium.
1.3 Effects of Density Dependence
It is well known that density-dependent effects, expressed through dependence
of functions g1, g2, g3 and g4 on initial population density can stabilize the equilib-
ria in the Nicholson-Bailey model. For example, [24] showed the stabilizing effect
of density-dependent self-limitation in the host by introducing the discrete form of
the logistic equation to the host equation and [20] provided an analysis of the sta-
bilizing effects of density-dependent mutual interference between searching par-
asitoid adults. In this section we will investigate some density-dependent effects
by incorporating them in the continuous-time portion of our hybrid model. A
key advantage of using the hybrid approach here is that these density-dependent
effects can act concurrently with host mortality from parasitism. This contrasts
with previous studies where for ease of discrete-time model formulation, it was
explicitly or implicitly assumed that the density-dependent mortality acts at a
stage before or after the stage where hosts are attacked by parasitoids.
1.3.1 Density Dependent Host Mortality
We first consider the dynamical interaction
dL
dτ= −cLP − c1L
2,dI
dτ= cLP,
dP
dτ= 0, (1.21)
11

i.e. g1 = c, g2 = c1L and g3 = g4 = 0. Here not only do both the host
mortalities occur concurrently but also the density-dependent mortality rate is
a function of the current density of hosts available. We assume that parasitized
larvae immediately becomes juvenile parasitoids which do not face competition for
resources with the host larvae, and hence, have no density-dependence mortality
acting on them, i.e. g4 = 0. In the absence of parasitoids, it is known that this
system would lead to Beverton-Holt dynamics in the host ([14], P. 125).
The solution to the above continuous-time model is
L(τ, t) =RHt
exp(cPtτ) + c1RHtexp(cPtτ)−1
cPt
(1.22a)
I(τ, t) =cPt
c1
ln
[1 + c1RHt
1− exp(−cPtτ)
cPt
]. (1.22b)
P (τ, t) = Pt (1.22c)
which gives the discrete-time host-parasitoid model as
Ht+1 = L(T, t) =RHt exp(−cTPt)
1 + c1RHt1−exp(−cTPt)
cPt
(1.23a)
Pt+1 = I(T, t) =kcPt
c1
ln
[1 + c1RHt
1− exp(−cTPt)
cPt
]. (1.23b)
The above system has two non-trivial equilibrium points. The first is the no-
parasitoid equilibrium that is set by the strength of the host-density dependence
H∗NC =
R− 1
c1TR, P ∗ = 0. (1.24)
The Beverton-Holt-like host dynamics imply that the host population alone can
never have overcompensation or exhibit cycles. Stability analysis using the Jury
conditions show that the above equilibrium is stable in the full system for
ln R <c1
kc, (1.25)
12

a condition that precludes growth of a small parasitoid population when the
hosts are at carrying capacity. Thus, sufficiently large values of c1/ck, which
can be interpreted as the strength of density-dependent mortality vs. parasitism,
stabilize the no-parasitoid equilibrium. Similar stability analysis on Mathematica
reveals that the second equilibrium, where both host and parasitoid are present
and given by
H∗ =
(exp( c1
kc)− 1
1− exp(c1kc
)
R
)cP ∗
c1R, P ∗ =
ln R− c1kc
cT, (1.26)
is stable for
z∗ <c1
ck< ln R, (1.27)
where z∗ is the solution to
z∗ + 1 =R(ln R− z∗)
R− exp (z∗). (1.28)
The constant z∗ is an increasing function of R, however increasing not as fast as
ln R. Thus the size of the stability region specified in (1.27), increases with R as is
illustrated in Figure 1.3. For c1/kc > ln R the no-parasitoid equilibrium (1.24) is
stable and as we will see, for c1/kc < z∗ one typically gets persistence of both host
and parasitoid populations in the sense of bounded oscillations. Figure 1.4 plots
the above equilibrium densities and illustrates the different transitions between
stability and instability. Note that for each value of the parameters there is
at most one stable equilibrium of the discrete-time model (1.23). This is in
contrast to the model studied by [32] which reduces to the Ricker model for
the host in the absence of parasitoids. Due to the overcompensation in the
Ricker model, the Neubert-Kot model may exhibit two locally stable attractors,
one where the consumer persists and other where it is extinct, for intermediate
13

Figure 1.3. The stability region specified in (1.27), for the discrete-time model
(1.23) as a function of strength of density-dependent mortality vs. parasitism
(c1/kc) and R (the number of viable eggs produced by each adult host). The
no-parasitoid equilibrium refers to (1.24) while the host-parasitoid equilibrium
refers to (1.26).
values of c1. Figure 1.5 illustrates a simulation of the discrete-time model (1.23),
with attack rate c chosen such that c1/kc takes values below, in, and above the
stable region (1.27). In summary, for a fixed parasitism rate, stability arises
at intermediate levels of density-dependent mortality. At low levels of density-
dependent mortality the host population becomes large enough for the parasitoids
to overexploit it, which leads to familiar cycles of increase and crashes. On the
other hand, strong density-dependent mortality causes a very fast decrease of
14

Figure 1.4. Plot of host and parasitoid equilibrium densities as a function of
the strength of density-dependent mortality (c1). Other parameter were taken as
R = 2, T = 1, k = 1 and c = 1. H∗ and P ∗ refer to the host-parasitoid equilibrium
(1.26) and H∗NC refers to the no-parasitoid equilibrium given by (1.24). The
solid and dashed lines correspond to stable and unstable equilibrium densities,
respectively.
the hosts throughout the vulnerable stage and prevents the parasitoids from
exploiting the resource at all, which leads to their extinction. Stability occurs in
the intermediate situation where parasitoids can get enough recruits for the next
generation but also do not overexploit the hosts. The quantity
q =R(exp c1
kc− 1)(ln R− c1
kc)
(R− 1)(R− exp c1kc
)(1.29)
is of special interest to biological control, for it represent the ratio of the host
15

Figure 1.5. Population densities of hosts and parasitoids in year t as given by the
discrete-time model (1.23). Parameters taken as R = 2, c1 = .01, k = 1, T = 1
and a) c = .05, b) c = .02 and c) c = .0125 which correspond to values below, in
and above the stable region (1.27), respectively. Initial densities are 20 and 30
for the host and parasitoid respectively.
16

equilibrium with parasitoids and without parasitoids. As one varies c1/kc in the
stability region, q increases monotonically between q∗ and one, where
q∗ =R(exp (z∗)− 1)(ln R− z∗)
(R− 1)(R− exp (z∗)). (1.30)
The quantity q∗ represent the maximum level of host depression that is consistent
with a stable dynamics. We calculated q∗ = .34 and .29 for R = 2 and 10
respectively. As 10 appears to be an upper limit on observed values of R [27], this
shows that strong host depression is accompanied by instability for biologically
appropriate parameters.
1.3.2 Density Dependent Parasitoid Mortality
We first consider the scenario of density-independent parasitoid mortality
which is incorporated in the following dynamical interaction
dL
dτ= −cLP,
dI
dτ= cLP,
dP
dτ= −c2P. (1.31)
This leads to a discrete-time model identical to the Nicholson-Bailey model given
by (1.8) with cT replaced by c[1−exp(−c1T )]/c1. Thus density-independent para-
sitoid mortality has no effect on stability. We now investigate if density-dependent
parasitoid mortality could stabilize the host-parasitoid interaction. Such density-
dependent mortality could arise due to limitation of adult parasitoids by a re-
source other than the hosts or by a specialist predator that responds to density
of parasitoids. Towards this end, we change the above interaction to
dL
dτ= −cLP,
dI
dτ= cLP,
dP
dτ= −c2P
2, (1.32)
17

i.e. g1 = c, g2 = g4 = 0 and g3 = c2P . Analysis of this system leads us to the
discrete-time model (1.6) with the function f given by
f(Ht, Pt) =1
(1 + c2TPt)c
c2
(1.33)
which has equilibrium densities
H∗ =R
c2c − 1
kc2T (R− 1), P ∗ =
Rc2c − 1
c2T. (1.34)
Note that this form of function f is identical to the popular version of f given by
the zero term of the negative binomial distribution [23]. This similarity is inter-
esting given that May’s model was motivated by a different situation – density
dependence in the parasitoid attack rate that is induced by assuming that hosts
vary in their susceptibility to attack. Stability arises in this model if c2 > c [23].
Here, we have shown that strong density-dependent parasitoid mortality may
similarly stabilize the host-parasitoid interaction. As with May’s model, stability
is associated with an increased host equilibrium, i.e. the parasitoids have reduced
capacity to overexploit their host.
1.4 Discussion
The preceding analyses revisit two classic questions in host-parasitoid the-
ory: how is the stability of interacting populations affected by the form of the
functional response and by density dependence. Our primary findings regard-
ing density dependence are unsurprising, but the results on the effects of the
functional response contrast starkly with previous work that used heuristically
formulated models.
18

The key previous result on the effects of the functional response was that of
[17] who argued that accelerating functional response do not compensate for the
instability in the Nicholson-Bailey model. This implies very different dynamics
in discrete-time models than in their continuous-time counterparts where accel-
erating functional responses are stabilizing [29]. Figure 1.2 shows the reason for
the different outcomes; essentially, our model recognizes that parasitism slows
down when the host population becomes small, thereby precluding the smallest
host populations. This leads to an increase in the equilibrium host density and
to stability. The ecological importance of our findings on the stabilizing effects of
accelerating functional responses will depend on the mechanism responsible for
the acceleration. The model in this paper assumes that the parasitoid attack rate
depends on the instantaneous host density. This is obviously an idealization, as
some time delay is inevitably involved. For type II functional responses, there
are mechanisms (e.g. those involving handling time) for which this delay is likely
to be short, but it is harder to defend this assumption with accelerating func-
tional responses caused by changes in parasitoid behavior. Reference [26] argued
that for aquatic predators, non-delayed, type III functional responses are seldom
observed, and we suspect that a similar situation holds for parasitoids. Yet the
delays involved in parasitoid response may plausibly be much shorter than the
duration of the vulnerable stage of the host, and in such circumstances our model
remains a more reasonable caricature of reality than its discrete-time counterpart.
The take-home message for applications is the need for careful consideration of
underlying mechanisms and any associated time delays when constructing mod-
els of any particular system that includes accelerating functional responses. Our
conclusion that density dependence in either host or parasitoid is stabilizing is,
19

by itself, unsurprising. But the dynamics of our model differs in important ways
from previous work, not least in the absence of multiple attractors [32, 22].
The work reported in this paper illustrates the limitations of models with the
form of equations (1.6), namely
Ht+1 = RHtf(Ht, Pt) (1.35a)
Pt+1 = kRHt[1− f(Ht, Pt)]. (1.35b)
Much theory on the periods of population cycles in consumer-resource systems
assumes this form or generalizations that allow adult individuals to survive from
one year to the next [28, 27], with one important conclusion being that in a
broad range of situations, consumer-resource interactions lead to a lower bound
on cycle periods close to 6 time units. Shorter periods typically require very large
values of the geometric rate of increase, R, which is expected to be less than 10
in natural systems [27]. By contrast, the model in this paper with the quadratic
functional response has a cycle period of 5 when R = 3.23, well within the
ecologically feasible range. Yet the data analyzed by [28] was broadly consistent
with expectations from the simpler model. Further work on cycle periods using
the semi-discrete formalism is clearly called for.
Finally, we note the generality of our approach. Here we focused on two as-
pects of consumer-resource interactions that have for decades been considered
important for stability of consumer-resource interactions. Many other processes
can be considered with semi-discrete models. For example, we have work in
progress on the consequences of host-feeding where parasitoids face a choice be-
tween eating or ovipositing in a host. Previous work (e.g. [38, 6, 21]) using
continuous-time models has identified situations where host feeding has no effect
20

on stability, and situations where it is stabilizing. With partially synchronized
life cycles, we lack intuition and systematic investigation is required.
21

Chapter 2
Stability in host-parasitoid
models due to variability in risk
It has been well known that enough variation in the risk of parasitism among
individual hosts can, if risk is gamma-distributed, stabilize the otherwise unstable
equilibrium of the Nicholson-Bailey host-parasitoid model [2]. Reference [19]
showed that the condition for stability is CV 2 > 1, where CV is the coefficient
of variation of the distribution of risk. An important assumption is that risk is
independent of local host density if the host is non-uniformly distributed in space
[7].
The CV 2 rule, and earlier results stressing the role of spatially aggregated
parasitism (e.g. [23]), stimulated hundreds of studies investigating parasitism
patterns in the field. Pacala and Hassell surveyed the studies and showed that
several data sets met the criterion [34] .
We show here that it is not the amount of variation, measured for example
22

by CV 2, but the shape of the distribution of risk that is crucial in stabilizing
the host-parasitoid interaction. We further show that the CV 2 rule is restricted
to the gamma distribution or to situations when the host rate of increase, R, is
close to one. In particular, to get stability robust to high rates of host increase,
the distribution needs to have its mode at zero and thereafter to decline; that is
the distribution needs to approximate a situation where a substantial fraction of
the host population is effectively in a refuge.
We also reinforce the previous observation of reference [30] that skewed risk of
the type needed for stability increases the host equilibrium above the Nicholson-
Bailey model value. Indeed, we develop a new, simple, and general criterion for
stability: adult host equilibrium density must increase as host reproductive rate
R increases.
2.1 Nicholson-Bailey model with variability in
host risk
We here formulate the Nicholson-Bailey parasitoid-host model using adult
host density as a state variable (e.g. [14]), rather than larvae as is frequently the
case (e.g. [27]). Consider a univoltine insect with Ht being the adult density at a
fixed date near the start of year t (where t is an integer). These adults give rise
to eggs that mature into RHt larvae. Here R > 1 denotes the number of viable
eggs produced by each adult. The larvae turn into pupae and metamorphose into
adults the next year. Assume that this insect is a host species, which becomes
vulnerable to attacks from a parasitoid during the larval stage. Adult (female)
23

parasitoids search for hosts during the window of time that host larvae are present,
then die. Parasitized hosts mature into a juvenile parasitoids, pupate, overwinter,
and emerge as adults the following year. If the parasitoids have a constant attack
rate c and the duration of the larval stage is T , then the host-parasitoid dynamics
is given by the Nicholson-Bailey model
Ht+1 = RHt exp(−cTPt) (2.1a)
Pt+1 = k(RHt −Ht+1) (2.1b)
where Ht and Pt are the adult host and adult parasitoid densities, respectively,
in year t, and k denotes the number of parasitoids that emerge per parasitized
host larva. Typically we set k = 1. It is well known that the equilibrium of this
model
H∗no variability =
ln(R)
kcT (R− 1), P ∗
no variability =ln(R)
cT(2.2)
is unstable for all R > 1 and both hosts and parasitoids show diverging oscillations
(e.g. [27]).
Variability is introduced by assuming that for each host, the parasitoids have
a different attack rate, which we can think of as the risk the individual host larva
faces from the average parasitoid [7]. This risk is assumed to be independent of
local host density and does not change as the larvae develop. Let the distribution
of risk across the larval population be p(x) at the beginning of the larval stage.
Thus the probability that a larva has a c value (risk) in the infinitesimal interval
[x, x + dx] is p(x)dx. The distribution is defined only for non-negative values of
and is assumed to remain the same from year to year.
The fraction of larvae that have risk in the interval [x, x + dx] is p(x)dx.
This fraction faces a mortality rate of xPt, hence, its fraction surviving would be
24

p(x) exp(−xTPt)dx. The total fraction of larvae surviving would be∫ ∞
x=0
p(x) exp(−xTPt)dx, (2.3)
which leads to the discrete-time model
Ht+1 = RHt
∫ ∞
x=0
p(x) exp(−xTPt)dx (2.4a)
Pt+1 = k(RHt −Ht+1). (2.4b)
This is a general form of the variable-risk model first proposed by [2] in which risk
was assumed to be gamma-distributed. Before proceeding with the equilibrium
and stability analysis of this model we discuss different ways that host risk can
be interpreted.
We introduced the above model by assuming host larvae face different mortal-
ity rates depending upon the attack rate of the parasitoids. An alternative way
to introduce variability is to assume that all larvae have same mortality rate, i.e.
same value of c, but are exposed to the parasitoids for different durations. Hence,
risk is now defined in terms of T , the length of time a larva is exposed to attack.
In such a case we have the discrete-time model
Ht+1 = RHt
∫ ∞
x=0
p(x) exp(−xcPt)dx (2.5a)
Pt+1 = k(RHt −Ht+1) (2.5b)
where now p(x) represents the distribution of time exposed to parasitoids T across
the larvae population. Another way to define risk would be through the product
cT . Hence not only do the host larvae face different mortality rates but also
this mortality rate acts for different durations T . In this scenario we have the
25

following discrete-time model
Ht+1 = RHt
∫ ∞
x=0
p(x) exp(−xPt)dx (2.6a)
Pt+1 = k(RHt −Ht+1) (2.6b)
where now p(x) denotes the distribution of cT values across the host larvae pop-
ulation.
A general way to define risk, which will also lead to the discrete-time model
(2.6) would be by∫ T
τ=0c(τ)dτ where now c(τ) represents the attack ate that a host
larva faces at a time instant τ in the larval stage and τ = 0, τ = T correspond
to start and end of the larval stage, respectively. All the above ways of defining
risk are actually special cases of this. As in the Nicholson-Bailey model both
parameters c and T appear together, all these different ways to define risk lead
to the same form of the discrete-time model, give and take some constants.
2.2 Stability, shape of the risk distribution and
the CV 2 rule
The discrete-time model (2.6) defines a general class of parasitoid-host models
in which risk varies among hosts, without specifying the particular probability
distribution that describes how risk varies among individuals. Stability analysis
of the model (Appendix B.1) provides a remarkably simple and elegant stability
condition: the host-parasitoid equilibrium is stable, if and only if, the adult host
equilibrium H* satisfies
dH∗
dR> 0. (2.7)
26

Although elegant, this result on its own does not relate stability to the distribution
of risk. We now investigate what forms of the distribution of risk can lead to
stability. The details are in Appendix B.2, where we show that a necessary and
sufficient condition for stability for values of R close to one (the minimum host
reproduction rate needed for a viable host population) is CV 2 > 1. However, this
condition does not necessarily induce stability at large values of R, which instead
requires the modal probability of parasitism to be zero.
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
3
x
Figure 2.1. Gamma distribution with mean one and CV 2 = .5 (dotted line),
CV 2 = 1 (dashed line), CV 2 = 3 (solid line)
A necessary and sufficient condition for stability for large values of R, is
that this mode at zero should be characterized by a risk distribution that either
increases unboundedly as risk approaches zero (p(0) is not finite) or when p(0) is
27

finite, the distribution falls off rapidly (p′(0) is sufficiently negative, more precisely
p′(0) < −p(0)2). For example, if p(x) is a gamma distribution, CV 2 > 1 implies
this particular shape near x = 0 (see Figure 2.1, which plots gamma distributions
for different values of CV ), and in this case, happens to be necessary and sufficient
for stability for all values of R > 1, hence the “CV 2 > 1 rule. We must emphasize,
however, that the CV 2 > 1 rule is true only for a specific distribution of risk,
namely a gamma distribution, and is not general. To reinforce that point, we
next show two examples of distributions of risk where even an infinite cannot
stabilize the host-parasitoid equilibrium for certain values of R.
2.2.1 Risk has an inverse gaussian distribution
The inverse gaussian distribution (Figure 2.2) has the property that with
increasing CV , the inverse gaussian distribution becomes more and more skewed
towards x = 0 but unlike the gamma distribution it always has a non-zero modal
probability of parasitism. This violates the condition for stability for large values
of R, provided in the previous section.
When the distribution of risk is an inverse gaussian distribution one can show
that the equilibrium cannot be stabilized for R > 4.92 irrespective of how large
R is (see Appendix B.3). This value of R is well within the ecologically feasible
range, which is expected to be less than 10 in natural systems [18, 27].
28

0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Figure 2.2. Inverse gaussian distribution with mean one and CV 2 = 1 (dashed
line), CV 2 = 3 (solid line) .
2.2.2 Risk is bounded from below
It is well known that the presence of a (fractional) refuge can stabilize a
Nicholson-Bailey-type model over some range of parameter values [15]. To in-
vestigate what happens when we explicitly exclude a refuge, we next analyze the
effects of variability when all the hosts have a risk greater than an arbitrary low
nonzero risk, c∗ . In this case, stability arises at low values of R and intermediate
values of CV 2, but not at lower or higher values of CV 2 (Figure 2.4).
Let the distribution of risk be given by
p(x) =
0 if x ≤ c∗
g(x− c∗) if x > c∗,(2.8)
which one can think of as a function g(x) shifted to the right by c∗ (Figure 2.3).
29

0 0.5 1 1.50.10
1
2
3
4
5
6
Figure 2.3. Gamma distribution with mean one and CV 2 = 1 shifted to the right
by 0.1 (c∗ = 0.1).
The host-parasitoid model is now given by
Ht+1 =RHt
∫ ∞
x=0
p(x) exp(−xPt)dx = RHt exp(−c∗Pt)
∫ ∞
y=0
g(y) exp(−yPt)dy
(2.9a)
Pt+1 =k(RHt −Ht+1). (2.9b)
When all the host larvae have a minimum risk c∗, the host equilibrium in now
constrained by the condition (Appendix B.4)
ln(R)
kc∗(R− 1)> H∗, (2.10)
and as the left-hand-side of this inequality is a decreasing function of R, we
have that at some large enough critical value R∗, the host equilibrium will be
a decreasing function of R, and hence unstable (from (2.7)). A formal stability
30

analysis of the above model (see Appendix B.4) shows that the equilibrium of
this model will always be unstable at some large enough value of R, irrespective
of the form taken by the function g(x).
Figure 2.4. Region of stability for the discrete-time model (2.9) when g(x) is a
gamma distribution with mean 1 (c = 1) c∗ = 0.05 and c∗ = 0.1.
This model also shows that a distribution that has a minimum level of risk
leads to an unstable equilibrium for some values of R, even when it is combined
with a distribution that, on its own and with modal risk of 0, induces stability
for all values of R. This point can be illustrated by letting the function g(x) in
31

(2.9) have the form as that of a gamma distribution with mean c and CV 2 > 1
(Figure 2.3). As noted above, increasing in the gamma distribution makes it more
skewed towards its minimum value (as in Figure 2.1). However, in this example,
when CV 2 is large, the fraction surviving parasitism closely approximates the
Nicholson-Bailey value:
exp(−c∗Pt)
∫ ∞
y=0
g(y) exp(−yPt)dy =exp(−c∗Pt)
(1 + cCV 2Pt)1/CV 2 ≈ exp(−c∗Pt), (2.11)
and hence, from (2.9) we recover the Nicholson-Bailey model with attack rate c∗.
Thus, if g(x) is highly skewed towards 0 (hence p(x) becomes skewed towards
c∗ ) then the host-parasitoid equilibrium is no longer stable. In summary, for
such distributions of risks where large CV corresponds to the distribution being
skewed towards c∗, stability arises at low values of R and the corresponding
stability region is maximized at intermediate levels of variability (as shown in
Figure 2.4). Note that the stability region becomes smaller with increasing c∗.
This result serves to reinforce the earlier intuition that, when variability in host
risk is stabilizing for large values of R, it is because the model approximates a
refuge.
2.2.3 Unexpected patterns among stability, R and CV 2
In both the above examples, stability arose at low values of R due to sufficient
variability in host risk, but was lost at larger values as these distributions did not
have the appropriate shape near x = 0. It is quite possible to have the opposite
scenario where the distribution does not have apparently-sufficient variability
(CV < 1) but can still induce stability at large values of R, if it has a mode at
zero followed by a sharp decline. For example, when p(x) = (1 + 2x2) exp(−2x)
32

which implies a mean risk of 1 and CV = 0.75, the corresponding host-parasitoid
equilibrium is stable for R > 4.12, but not for smaller R values.
Finally, we show, using examples, that for intermediate values of R, (1) even
when the distribution meets both criteria (mode at zero followed by a sharp
decline and CV > 1), we can get instability and (2) even when it does not meet
the criteria we can get stability. The first example is a distribution that has the
appropriate shape near x = 0, CV > 1 and a hump at higher risk (an additional
non-zero mode). This hump tends to destabilize the equilibrium at intermediate
values of R. For example, consider risk distributed across the host population
such that 60 percent of the host larvae have an equal risk of one and 40 percent of
hosts have risk distributed as a gamma distribution with mean one and variance 6.
Numerical analysis of the subsequent stability condition ((B.14), Appendix B.2),
shows that the equilibrium is unstable for host rate of increase in the interval
1.33 < R < 2.46 and stable otherwise.
The second example concerns distributions that are bi-modal with two non-
zero modes. For example, 50 percent of hosts have risk one and the remaining
have a risk of seven. With no mode at zero and CV < 1 we can conclude that the
equilibrium is unstable for small and large values of R. However, in this example
stability arises at intermediate values of 2.1 < R < 3.83.
2.2.4 Skewed risk, parasitoid efficiency, and host suppres-
sion
We have shown that stability results from a distribution of risk that is con-
centrated at 0 risk (Figure 2.1). Such a distribution is not the hallmark of an
33

effective parasitoid. The consequence of this inefficiency is manifest in the fol-
lowing relationships. First, it can be shown (Appendix B.2) that when there is
variation in risk among hosts, the equilibrium densities are always higher than
when there is no variation. Secondly our general stability criterion
dH∗
dR> 0. (2.12)
is true, if and only if, the parasitoid efficiency, defined as the negative log of
fraction of host escaping parasitism over the parasitoid density [15], decreases
sufficiently fast with increasing parasitoid equilibrium or increasing R (see Ap-
pendix B.5 for details).
Figure 2.5 plots parasitoid efficiency as a function of the host rate of increase,
for the gamma and the inverse gaussian distribution. When the host rate of
increase is near 1 and parasitoid density is low, parasitoids attack hosts with
high risk that lie in the tail of the distribution p(x). Consequentially, the shape
of the distribution near x = 0 does not matter and sufficiently skewed parasitoid
attacks (which happens when CV > 1) reduce the parasitoid efficiency enough
to induce stability. Notice from Figure 2.5, that the gamma and inverse gaussian
distributions (with same mean and variance) reduce the parasitoid efficiency by
equal amounts near R = 1, even though they have different shapes near x = 0.
However, at large values of R and an increased parasitoid equilibrium density,
even hosts at low risk become vulnerable. The crucial factor deciding stability
now is the shape of the distribution near x = 0 which determines what fraction of
hosts have low enough risk to escape parasitism. An unbounded gamma distribu-
tion (i.e, p(x) → ∞ as x → 0 which happens when CV > 1 ) has a much larger
fraction of such hosts compared to an inverse gaussian distribution (p(0) = 0),
34

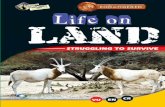
Figure 2.5. Parasitoid efficiency defined as ln(R)P ∗ where P ∗ denotes the parasitoid
equilibrium density as a function of host rate of increase for different distributions
of risk : 1) No variability in risk (Nicholson-Bailey model). All host have risk
equal to 1. 2) Risk has a gamma distribution with mean 1 and variance 0.5. 3)
Risk has an inverse gaussian distribution with mean 1 and variance 2. 4) Risk
has a gamma distribution with mean 1 and variance 2. Solid lines and dashed
lines represent stable and unstable host-parasitoid equilibrium, respectively
and hence, for a given R many more parasitoids are needed to maintain the host
equilibrium when the risk is gamma distributed compared to when it is inverse
gaussian distributed. This leads to a more reduced parasitoid efficiency and a
much lager host equilibrium when the risk has such a gamma distribution (which
is stabilizing) compared to when it has an inverse gaussian distribution (not sta-
35

Figure 2.6. Adult host equilibrium as a function of host rate of increase for
different distributions of risk. See caption of Figure 2.5 for more details.
bilizing) as shown in Figure 2.6.
2.3 Discussion
2.3.1 What the field biologist should measure
The results show that estimating the variance (or CV ) in the distribution of
risk among hosts does not inform us of the capacity of skewed attacks to stabilize
the host-parasitoid interaction, unless there are grounds for believing that risk
is, at least approximately, gamma distributed or the hosts reproduction rate is
36

close to 1. The key to stability for higher reproduction rates is the shape of
the distribution of risk. More specifically, the modal risk should be zero and
be associated with a risk distribution that either grows unboundedly as risk ap-
proaches zero (such as gamma with CV > 1) or falls off rapidly if bounded at
zero risk. Note that this particular shape near x = 0 is independent of whether
or not CV is larger than 1 (unless risk is gamma distributed). Hence, one could
have a distribution with CV > 1 but it does not meet the shape criterion (will
induce stability only for small values of R) or vice-versa (will induce stability
only for large values of R). These criteria, taken together, are neither necessary
nor sufficient to induce stability for any value of R and the outcome can only
be determined through numerical analysis. Indeed, we show that stability can
arise (when both are not true) and stability can be lost (when both are true) at
intermediate R values.
Theory in this paper shows that the general, necessary and sufficient, criterion
for stability is, instead,
dH∗
dR> 0. (2.13)
This condition might be tested directly by manipulating R experimentally (for
example by imposing mortality on some non-vulnerable stage of the host), or by
estimating host density along a gradient of host productivity ([4] did such a survey
looking for the effects of intraguild predation). In either approach, however, other
mechanisms that cause density dependence in the parasitoid could cause host
equilibrium to increase with host rate of increase, so demonstrating that this
result holds in any given situation does not establish that stability results from
skewed risk.
37

Three additional factors bear on the collection of appropriate field data. First,
we cannot measure the distribution of risk directly: any particular host is either
parasitized or not. The sampling unit is usually a patch of hosts, for which the
fraction parasitized is calculated. More precisely, if all hosts in a patch have
risk c, then at equilibrium, the fraction parasitized (f) at any time τ from the
beginning of the larval stage. will be 1 − exp(τcP ∗), where P ∗ denotes the
parasitoid equilibrium density. When the data are of this form (and when the
fraction parasitized is not related to the host density in the patch), they can
either be transformed back into risk estimates, or alternatively, one can directly
work with the distribution of fraction parasitized which is given by
p(c)|c=−log(1−f)/τP ∗
τP ∗(1− f)(2.14)
At the beginning of the larval stage this distribution is skewed towards the left
(f = 0), irrespective of what the distribution of risk is. However, as time passes,
more individuals get parasitized shifting the distribution towards f = 1. If the
distribution of fraction parasitized has coefficient of variation bigger than one
and has a mode that remains at zero at the end of the larval stage, then the
host-parasitoid equilibrium is stable for small and large values of R, respectively
(Appendix B.6).
Second, as mentioned above, the distribution that determines stability is the
probability of parasitism after all parasite activity has finished for the generation.
Although some field studies get such final distributions (e.g. by larval parasitoids
that can be detected in the host pupal stage), many are snapshots taken sometime
within the period of parasitism. These studies will not yield the appropriate data.
The point is illustrated with data collected twice in the parasitism season in [9],
– this is one of the best cases for CV 2 > 1 in [34]. Although the mode of this
38

distribution is zero on both dates, the distribution shifted to the right between
sampling periods, and it is not clear what the final distribution would have been
if it had been sampled.
A final comment is that field data on the frequency distribution of fraction
parasitized may have difficulty distinguishing between an underlying distribution
of risk that has a mode at a low (but positive) risk value (may not stabilize the
equilibrium) and one with a mode at zero (can cause stability). Unless sample
sizes are large, and parasitoid density high (so the actual risk run is as high as it
can be), a non-zero mode in the underlying probability distribution may produce
a mode of zero in the frequency distribution of fraction parasitized.
2.3.2 Stability and within-generation dynamics
The Nicholson-Bailey discrete-generation formulation implicitly ignores the
sequence of events and dynamics that occur within each generation. The results
are determined by conditions existing at the start of the period of interaction.
Clearly, that is not typically what happens in real organisms as they respond
to ongoing changes in the environment, including their resources or enemies.
As was shown in the first chapter, for all but the simplest of processes, the
dynamics are different once account is taken of events within the generation. For
example, the equilibrium of a Nicholson-Bailey model can never be stable with
an accelerating or type 3 functional response, if the parasitoid attack rate at any
instant in the larval stage depends on the initial host larval density, as is the case
in the standard model. However, if the attack rate depends on the current host
larval density, and changes as host density decreases in the larval stage, then the
39

corresponding discrete-time model with such a functional response can be stable
[1]. Consideration of such within-generation dynamics is clearly warranted in
cases where host risk changes with local host density.
Reference [27] explore a continuous-time stage-structured model in which par-
asitism risk has a skewed distribution caused by the adult parasitoids searching
as a swarm. This produces areas of high and low host risk and stability can re-
sult when the parasitoids are fixed or move little through the vulnerable period.
But as the parasitoid swarm moves more throughout the vulnerable period, risk
becomes less skewed and stability is lost, even though risk is highly skewed at
any point in time.
Refuges, or differences in space that determine attractiveness to the para-
sitoid, may lead to constant lifelong relative risk, and we know from other models
that refuges can be stabilizing. At least a partial refuge exists in California red
scale attacked by the parasitoid Aphytis. In this case experimental removal of
hosts with very low risk, however, had no effect on stability [31].
Finally, our results reinforce the point that stability arising from a skewed
risk distribution in the Nicholson-Bailey framework comes at the cost of weak
suppression of the host density [30]. If we think of the parasitoid population
operating over the host larval duration, a sufficiently skewed distribution arises
because attacks are continuously concentrated in the small fraction of hosts that
were already at high risk. As host reproductive rate, R, increases, more par-
asitoids are required to maintain the host at equilibrium, and each parasitoids
efficiency declines further, and the host equilibrium density increases.
This trade off between suppression and stability is most relevant to biological
40

control of pest insects in agriculture, where models in the Nicholson-Bailey family
have a long history. The crop is usually an environment that produces high rates
of pest increase, R, and it is precisely here that H∗ needs to be greatly suppressed,
yet is not likely to be achieved via this mechanism.
41

Bibliography
[1] Singh A and R. M. Nisbet. Semi-discrete host-parasitoid models. J. of
Theoretical Biology, 247:733–742, 2007.
[2] V. A. Bailey, A. J. Nicholson, and E.J. Williams. Interaction between hosts
and parasites when some host individuals are more difficult to find than
others. J. of Theoretical Biology, 3:1–18, 1962.
[3] M. B. Bonsall and M. P. Hassell. Parasitoid-mediated effects: apparent
competition and the persistence of host-parasitoid assemblages. Researches
on Population Ecology, 41(1):59–68, 1999.
[4] E. T. Borer, C. J. Birggs, W. W. Murdoch, and S. L. Swarbrick. Testing
intraguild predation theory in a field system: Does numerical dominance
shift along a gradient of productivity? Ecology Letters, 6:929–935, 2003.
[5] C. J. Briggs and H. C. J. Godfray. The dynamics of insect-pathogen interac-
tions in seasonal environments. Theoretical Population Biology, 50:149–177,
1996.
[6] C. J. Briggs, R. M. Nisbet, W. W. Murdoch, T. R. Collier, and J.A.J. Metz.
Dynamical effects of host-feeding. J. of Animal Ecology, 64:403–416, 1995.
42

[7] P. L. Chesson and W. W. Murdoch. Aggregation of risk: Relationships
among host-parasitoid models. The American Naturalist, 127:696–715, 1986.
[8] C. J. Dugaw, A. Hastings, E. L. Preisser, and D. R. Strong. Seasonally
limited host supply generates microparasite population cycles. Bulletin of
Mathematical Biology, 66(3):583–594, 2003.
[9] L. E. Ehler, R. L. Bugg, M. B. Hertlein, H. P. Sauter, and K. Thorarinsson.
Patch-exploitation patterns in an egg parasite of elm leaf beetle. Ento-
mophaga, 32:233–239, 1987.
[10] S. Elaydi. An Introduction to Difference Equations. Springer, Newyork,
1996.
[11] T. M. Eskola and S. A. Geritz. On the derivation of discrete-time population
models by varying within-season patterns of reproduction and aggression.
Bulletin of Mathematical Biology, 69:329–346, 2007.
[12] S. A. Geritz and E. Kisdi. On the mechanistic underpinning of discrete-
time population models with complex dynamics. J. of Theoretical Biology,
228(2):261–269, 2004.
[13] H.C.J. Godfray, M.P. Hassell, and R.D. Holt. The population dynamic con-
sequences of phenological asynchrony between parasitoids and their hosts.
J. of Animal Ecology, 63(1):1–10, 1994.
[14] W. S. C. Gurney and R. M. Nisbet. Ecological Dynamics. Oxford University
Press, 1998.
[15] M. P. Hassell. The dynamics of arthropod predator-prey systems. Princeton
University Press, Princeton, NJ, 1978.
43

[16] M. P. Hassell. The spatial and temporal dynamics of host parasitoid interac-
tions. Oxford University Press, New York, 2000.
[17] M. P. Hassell and H. N. Comins. Sigmoid functional responses and popula-
tion stability. Theoretical Population Biology, 14:62–66, 1978.
[18] M. P. Hassell, J. H. Lawton, and R. M. May. Patterns of dynamical behavior
in single-species populations. J. of Animal Ecology, 45:471–486, 1976.
[19] M. P. Hassell, R. M. May, S. W. Pacala, and P. L. Chesson. The persistence
of host-parasitoid associations in patchy environments I: A general criterion.
The American Naturalist, 138:568–583, 1991.
[20] M. P. Hassell and G. C. Varley. New inductive population model for insect
parasites and its bearing on biological control. Nature, 223:1133 – 1137,
1969.
[21] N. A. C. Kidd and M. A. Jervis. The effects of host-feeding behaviour on the
dynamics of parasitoid-host interactions, and the implications for biological
control. Researches on Population Ecology, 31(2):235–274, 1989.
[22] R. Kon. Multiple attractors in host-parasitoid interactions: Coexistence and
extinction. Mathematical Bioscience, 201:172–183, 2006.
[23] R. M. May. Host-parasitoid systems in patchy environments: A phenomeno-
logical model. J. of Animal Ecology, 47:833–844, 1978.
[24] R. M. May, M. P. Hassell, R. M. Anderson, and D. W. Tonkyn. Density
dependence in host-parasitoid models. J. of Animal Ecology, 50:855–865,
1981.
44

[25] M. Munster-Swendsen and G. Nachman. Asynchrony in insect host-parasite
interaction and its effect on stability, studied by a simulation model. J. of
Animal Ecology, 47(1):159–171, 1978.
[26] W. W. Murdoch and J. R. Bence. General predators and unstable prey
populations. In W.C.Kerfoot and A. Sih [eds.], Predation in Aquatic Com-
munities: Direct and Indirect Effects. New England, pages 17–30, 1987.
[27] W. W. Murdoch, C. J. Briggs, and R. M. Nisbet. Consumer-Resouse Dy-
namics. Princeton University Press, Princeton,NJ, 2003.
[28] W. W. Murdoch, B. E. Kendall, R. M. Nisbet, C. J. Briggs, E. McCauley,
and R Bolser. Single-species models for many-species food webs. Nature,
417:541–543, 2001.
[29] W. W. Murdoch and A. Oaten. Predation and population stability. Adv.
Ecol. Res., 9:1–131, 1975.
[30] W. W. Murdoch and A. Oaten. Aggregation by parasitoids and predators:
Effects on equilibrium and stability. The American Naturalist, 134:288–310,
1989.
[31] W. W. Murdoch, S. L. Swarbrick, R. F. Luck, S. J. Walde, and D. S. Yu.
Refuge dynamics and metapopulation dynamics: An experimental test. The
American Naturalist, 147:424–444, 1996.
[32] M. G. Neubert and M. Kot. The subcritical collapse of predator populations
in discrete-time predator-prey models. Mathematical Bioscience, 110:45–66,
1992.
45

[33] A.J. Nicholson and V. A. Bailey. The balance of animal populations. part
1. Proc. of Zoological Society of London, 3:551–598, 1935.
[34] S. W. Pacala and M. P. Hassell. The persistence of host-parasitoid associ-
ations in patchy environments II: Evaluation of field data. The American
Naturalist, 138:584–605, 1991.
[35] E. Pachepsky, R. M. Nisbet, and W. W. Murdoch. Between discrete and
continuous: Consumer-resource dynamics with synchronized reproduction.
Ecology, in press, 2007.
[36] D. J. Rogers. Random searching and incest population models. J. of Animal
Ecology, 41:369–383, 1972.
[37] P. Rohani, H. C. J. Godfray, and M. P. Hassell. Aggregation and the dy-
namics of host-parasitoid systems: A discrete-generation model with within-
generation redistribution. The American Naturalist, 144(3):491–509, 1994.
[38] N. Yamamura and E. Yano. A simple model of host-parasitoid interaction
with host-feeding. Researches on Population Ecology, 30(2):353–369, 1988.
46

Appendix A
Semi-discrete host-parasitoid
models
A.1 Appendix : Stability Analysis for Quadratic
functional responses
Denoting small fluctuation around the equilibrium (1.13) by ht+1 and pt+1,
one obtains after linearization the following linear discrete system ht+1
pt+1
= A
ht
pt
, (A.1)
with
A =
1 + RH∗ ∂f(Ht,Pt)∂Ht
|Ht=H∗,Pt=P ∗ RH∗ ∂f(Ht,Pt)∂Pt
|Ht=H∗,Pt=P ∗
k[R− 1−RH∗ ∂f(Ht,Pt)
∂Ht|Ht=H∗,Pt=P ∗
]−kRH∗ ∂f(Ht,Pt)
∂Pt|Ht=H∗,Pt=P ∗
.(A.2)
47

For stability of the above system we require the following three Jury conditions
[10] to hold
1− tr(A) + det(A) > 0 (A.3a)
1 + tr(A) + det(A) > 0 (A.3b)
1− det(A) > 0. (A.3c)
Substituting the function
f(Ht, Rt) =1
1 + cTRHtPt
(A.4)
and the equilibrium point
H∗ =1√
RcTk, P ∗ = k(R− 1)H∗ (A.5)
in (A.2) we have
tr(A) =2
R, Det(A) = 1 (A.6)
which corresponds to a neutrally stable equilibrium. The roots of the character-
istic equation, Det(A− λI) = 0, of the matrix A are given by
λ = exp(±θi), θ = arctan(√
R2 − 1), (A.7)
and hence, a period of oscillation of 2π/ arctan(√
R2 − 1).
A.2 Appendix : Stability Analysis for Higher
Order Functional Responses
Substituting the function
f(Ht, Rt) =1
[1 + cTm(RHt)mPt]1m
(A.8)
48

and the equilibrium
H∗ =
(Rm − 1
cTkmRm(R− 1)
)1/(m+1)
, P ∗ = k(R− 1)H∗ (A.9)
in (A.2) we have
tr(A) =1−R−m + (R− 1)mR−m
(R− 1)m, Det(A) =
R(1−R−m)
(R− 1)m. (A.10)
Using the fact that for all m > 1, R > 1 we have tr(A) > 0, 1 > Det(A) > 0 and
1− tr(A) + det(A) =(m + 1)(1−R−m)
m> 0, (A.11)
one can see that the Jury conditions (A.3) hold, and hence there is a stable
equilibrium, for m > 1.
A.3 Appendix : Stability Analysis for Type II
and III Functional Responses
The solution for the corresponding continuous-time model
dL(τ, t)
dτ= −
c(
L(τ,t)LH
)m
1 +(
L(τ,t)LH
)m+1
L(τ, t)P (τ, t) (A.12a)
P (τ, t) = Pt (A.12b)
RHt = I(τ, t) + L(τ, t), (A.12c)
is
L(τ, t)− Lm+1H
mLm(τ, t)= RHt −
Lm+1H
m(RHt)m− cLHPtτ (A.13)
which gives us the implicitly defined discrete-time model
Ht+1 −Lm+1
H
mHmt+1
= RHt −Lm+1
H
m(RHt)m− cTLHPt (A.14a)
Pt+1 = k(RHt −Ht+1) (A.14b)
49

and the following fixed point
H∗ = LH
(Rm − 1
mRm(R− 1)(kcTLH − 1)
) 1m+1
, P ∗ = k(R− 1)H∗, kcTLH > 1.
(A.15)
Linearizing the above discrete-time model about this equilibrium, we obtain the
linear discrete system ht+1
pt+1
= A
ht
pt
, (A.16)
with
A =
∂Ht+1
∂Ht|Ht=H∗,Pt=P ∗
∂Ht+1
∂Pt|Ht=H∗,Pt=P ∗
∂Pt+1
∂Ht|Ht=H∗,Pt=P ∗
∂Pt+1
∂Pt|Ht=H∗,Pt=P ∗
. (A.17)
Using (A.14) and (A.15) we find that
tr(A) =R + γ
Rm + kcTLH
1 + γ, Det(A) =
RkcTLH
1 + γ, γ =
(kcTLH − 1)(R− 1)mRm
Rm − 1.
(A.18)
Substituting these in the Jury conditions (A.3), one finds that inequalities (A.3a)-
(A.3b) hold for all m > 0, kcTLH > 1, R > 1. The stability condition comes
from inequality (A.3c) which holds for all m∗ < m where constant m∗ > 1 is the
solution to
m∗(1− 1
Rm∗) =
kcTLHR− 1
(kcTLH − 1)(R− 1). (A.19)
50

Appendix B
Stability in host-parasitoid
models due to variability in risk
B.1 Appendix : Stability analysis for host-parasitoid
models
Consider the discrete-time model
Ht+1 = RHtf(Pt) (B.1)
Pt+1 = k(RHt −Ht+1) (B.2)
where f(Pt) represents the fraction of host that escape parasitism. The equilib-
rium is given as the solution of
1
R= f(P ∗), P ∗ = k(R− 1)H∗, (B.3)
51

where H∗ and P ∗ denote the adult host and parasitoid equilibrium, respectively.
Denoting small fluctuation around the equilibrium H∗ and P ∗ by ht := Ht −H∗
and pt := Pt−P ∗, respectively, one obtains using linearization the following linear
discrete system ht+1
pt+1
= A
ht
pt
, (B.4)
with
A =
1 RH∗df(Pt)
dPt
|Pt=P ∗
k(R− 1) −RkH∗df(Pt)
dPt
|Pt=P ∗
.
The above equilibrium is stable, if and only if, the following three Jury conditions
(A.3) hold, which implies
−kR(R− 1)H∗df(Pt)
dPt
|Pt=P ∗ > 0 (B.5a)
2− kR(R + 1)H∗df(Pt)
dPt
|Pt=P ∗ > 0 (B.5b)
1 + kR2H∗df(Pt)
dPt
|Pt=P ∗ > 0. (B.5c)
As the function f(Pt) is a decreasing function of Pt, R > 1, the first two inequali-
ties of (B.5) always hold and the stability condition is given by inequality (B.5c),
which using kH∗ = P ∗/(R− 1) can be rewritten as
−P ∗df(Pt)
dPt
|Pt=P ∗ <1
R− 1
R2. (B.6)
Differentiating the first equation in (B.3) with respect to R we have
1
R2= −df(Pt)
dPt
|Pt=P ∗dP ∗
dR(B.7)
which substituting in (B.6) gives us
dP ∗
P ∗dR>
1
R− 1. (B.8)
52

Using P ∗ = k(R− 1)H∗ the above stability condition simply reduces to
dH∗
dR> 0. (B.9)
B.2 Appendix : Stability condition in terms of
distribution of risk
The equilibrium point of the discrete-time model (2.6) is
1
R=
∫ ∞
x=0
p(x) exp(−xP ∗)dx, H∗ =P ∗
k(R− 1). (B.10)
Let the mean risk be c. As exp(−xP ∗) is a convex function, we have from
Jensens’s inequality that
1
R=
∫ ∞
x=0
p(x) exp(−xP ∗)dx > exp(−cP ∗), (B.11)
which implies
P ∗ >ln(R)
c= P ∗
no variability, H∗ >ln(R)
kc(R− 1)= H∗
no variability, (B.12)
hence variability in risk leads to a larger host equilibrium. Substituting
f(Pt) =
∫ ∞
x=0
p(x) exp(−xPt)dx (B.13)
in the stability condition (B.6), we have the following stability condition in terms
of the distribution of risk
P ∗∫ ∞
x=0
xp(x) exp(−xP ∗)dx <1
R− 1
R2. (B.14)
53

B.2.1 Stability for small values of R
As∫∞
x=0p(x)dx=1, we have from (B.10) that in the limit when R approaches
1, the parasitoid equilibrium approaches zero. So when R is close to one, we can
approximate exp(−xP ∗) as 1− xP ∗ + x2P ∗2/2. Using (B.10) we have
1
R= 1− cP ∗ + mP ∗2/2, (B.15)
which implies
P ∗ =c−
√(c2 − 2m
R− 1
R)
m(B.16)
where the second moment m = c2(1 + CV 2) and CV denotes the coefficient of
variation of the distribution of risk. Using the stability condition (B.6) with
f(Pt) = 1 − cPt + mPt2/2, we have that the above equilibrium is stable, if and
only if,
R2P ∗
R− 1(c−mP ∗) < 1. (B.17)
Using (B.15), inequality (B.17) becomes
1
R− 1/2<
P ∗
R− 1
m
c. (B.18)
As R approaches one, from (B.16), P ∗/(R − 1) approaches 1/c and the above
inequality reduces to
2 <m
c2, (B.19)
which is the same as CV 2 > 1.
54

B.2.2 Stability for large values of R
If p(x) is differentiable, then using integration by parts and the fact that for a
probability density function p(x), limx→0 xp(x)= limx→∞ xp(x)=0, we have that
the stability condition (B.14) is equivalent to
P ∗∫ ∞
x=0
xp(x) exp(−xP ∗)dx =
∫ ∞
x=0
(p(x) + xp′(x)) exp(−xP ∗)dx <1
R− 1
R2.
(B.20)
which using∫∞
x=0p(x) exp(−xP ∗)dx = 1/R reduces to∫ ∞
x=0
xp′(x) exp(−xP ∗)dx < − 1
R2. (B.21)
In the limit when R is large ( hence from (B.12), P ∗ is large), the sign of∫ ∞
x=0
xp′(x) exp(−xP ∗)dx (B.22)
would be the same as the sign of p′(x) near x = 0. Thus, if distribution of risk is
increasing near x = 0, then for sufficiently large R, the integral on the left-hand-
side of (B.21) will be positive, and the corresponding host-parasitoid equilibrium
will be unstable. Thus stability at large values of R require the distribution of
risk to be decreasing near x = 0, i.e., the distribution should have a mode at
zero.
We now find out how fast the the distribution of risk should be decreasing for
stability to occur. To simplify the mathematics, we only consider distributions
of risks that can be expressed as
p(x) =∞∑i=0
anixni (B.23)
for all positive x, where ni are real numbers bigger than −1 (required for the
distribution to have a finite area), ni < ni+1 and aniare non-zero real numbers.
55

Using ∫ ∞
x=0
xni exp(−xPt)dx =Γ[ni + 1]
Ptni+1 (B.24)
where Γ[ni + 1] is the Euler gamma function, for sufficiently large Pt we can
approximate
f(Pt) =
∫ ∞
x=0
p(x) exp(−xPt)dx ≈ an0
Γ[n0 + 1]
Ptn0+1 + an1
Γ[n1 + 1]
Ptn1+1 (B.25)
after ignoring all terms corresponding to i ≥ 2. Substituting this approximation
for f(Pt) in (B.10) and stability condition (B.21), we have that the parasitoid
equilibrium is given by
1
R=
1∑i=0
ani
Γ[ni + 1]
P ∗ni+1 (B.26)
and this equilibrium is stable, if and only if,
1∑i=0
ani
Γ[ni + 2]− Γ[ni + 1]
P ∗ni+1 +
(1∑
i=0
ani
Γ[ni + 1]
P ∗ni+1
)2
< 0. (B.27)
Now we consider four different possibilities for a distribution with mode at zero.
Case 1: Assume −1 < n0 < 0, i.e., the distribution tends to infinity as x
approaches zero. Then, in the limit as R goes to infinity, hence P ∗ goes to
infinity, inequality (B.27) is simply
an0
Γ[n0 + 2]− Γ[n0 + 1]
P ∗n0+1 < 0, (B.28)
after ignoring terms of the form 1/P ∗n1+1, 1/P ∗2n0+2, 1/P ∗n0+n1+2 and 1/P ∗2n1+2,
which will be dominated by 1/P ∗n0+1. As Γ[n0+2]−Γ[n0+1] < 0 for −1 < n0 < 0
and an0 > 0 (as the distribution can only take positive values), inequality (B.28)
holds. Hence, in this case the equilbrium will be stable for large enough R.
56

Case 2: Assume n0 = 0 and 0 < n1 < 1. Hence the distribution is finite at
x = 0 (p(0) = a0) and has an infinite negative slope at x = 0. Then, in the limit
as R goes to infinity, the inequality (B.27) is
an1
Γ[n1 + 2]− Γ[n1 + 1]
P ∗n1+1 < 0, (B.29)
after ignoring all higher order terms in 1/P ∗. As now Γ[n1 +2]−Γ[n1 +1] > 0 for
0 < n1 < 1 but an1 < 0 (as the distribution has a negative slope near x = 0) the
above inequality is again true, and hence, stability for sufficiently large values of
R.
Case 3: Assume n0 = 0 and n1 = 1. Thus the distribution is finite at x = 0
with value p(0) = a0 and also has a finite slope of p′(0) = a1 at x = 0. In the
limit as R goes to infinity, the inequality (B.27) is (after dropping 1/P ∗3 and
1/P ∗4 terms)
a11
P ∗2 +
(a0
1
P ∗
)2
< 0. (B.30)
Hence, if a1 < −a20, inequality (B.30) is true, and hence, the equilibrium is stable
for sufficiently large values of R.
Case 4: Assume all the above cases are false, i.e., n0 > 0 or n0 = 0, n1 > 1.
In the limit as R goes to infinity, the inequality (B.27) is
an0
Γ[n0 + 2]− Γ[n0 + 1]
P ∗n0+1 < 0 (B.31)
for n0 > 0 and (a0
1
P ∗
)2
< 0, (B.32)
for n0 = 0 and n1 > 1. As Γ[n0 + 2]−Γ[n0 + 1] > 0 for n0 > 0, both of the above
inequalities can never be true, i.e., no stability for large values of R.
57

In summary, for the general class of distributions of risk considered in (B.23),
the host-parasitoid equilibrium is stable for sufficiently large values of R, if and
only if, the distribution of risk is not finite at x = 0, or when finite, the slope at
x = 0 should either be negative infinity or sufficiently negative p′(0) < −p(0)2.
B.3 Appendix : Stability Analysis for host-parasitoid
when risk is inverse gaussian distributed
In the case when the distribution of risk is an inverse gaussian distribution
with mean c and coefficient of variation CV , we have (Chhikara and Folks, 1989)
f(Pt) =
∫ ∞
x=0
p(x) exp(−xP ∗)dx = exp
(1
CV 2(1−
√1 + 2cCV 2Pt
). (B.33)
Thus the discrete-time model (2.6) becomes
Ht+1 = RHt exp
(1
CV 2(1−
√1 + 2cCV 2Pt)
)(B.34a)
Pt+1 = k(RHt −Ht+1). (B.34b)
The equilibrium of this model is given as
H∗ =.5CV 2(ln(R))2 + ln(R)
kc(R− 1), P ∗ =
.5CV 2(ln(R))2 + ln(R)
c. (B.35)
Using the stability condition (B.6) we have that the above equilibrium is stable,
if and only if,
.5CV 2(ln(R))2 + ln(R)
CV 2 ln(R) + 1<
R− 1
R. (B.36)
Hence, if R is chosen such that
.5 ln(R) >R− 1
R, (B.37)
58

which corresponds to R > 4.92, then even an infinite amount of CV will not be
able to stabilize the equilibrium.
B.4 Appendix : Stability Analysis for host-parasitoid
when risk is bounded from below
At equilibrium we have
exp(−c∗P ∗)
∫ ∞
y=0
g(y) exp(−yP ∗)dy =1
R, (B.38)
and as∫∞
y=0g(y) exp(−yP ∗)dy <
∫∞y=0
g(y)dy = 1, we have that exp(−c∗P ∗) <
1/R, and using (B.3), the adult host equilibrium is now constraint to satisfy
ln(R)
kc∗(R− 1)> H∗. (B.39)
Using the stability condition (B.6) we have that the equilibrium of the discrete-
time model (2.9) is stable, if and only if,
P ∗c∗
R+ P ∗ exp(−c∗P ∗)
∫ ∞
y=0
yg(y) exp(−yP ∗)dy <1
R− 1
R2. (B.40)
As for a given distribution of risk p(x), P ∗ is a monotonically increasing function
of R, for large enough R we have P ∗ > 1/c∗ and inequality (B.40) will not hold,
i.e., the equilibrium will be unstable.
59

B.5 Appendix : Parasitoid efficiency
We define parasitoid efficiency at equilibrium as (Hassell, 1978)
ε :=
ln
(RH∗
RH∗ − P ∗/k
)P ∗ = − ln (f(P ∗))
P ∗ . (B.41)
As the fraction surviving is 1/R at equilibrium, we have
ε = − ln (f(P ∗))
P ∗ =ln(R)
P ∗ . (B.42)
Differentiating with respect to R we have
dε
dR=
1
P ∗2
(P ∗
R− ln(R)
dP ∗
dR
). (B.43)
Using the stability condition (B.8) we have that the host-parasitoid equilibrium
is stable, if and only if, the parasitoid efficiency satisfies
dε
dR<
1
P ∗
(1
R− ln(R)
R− 1
)< 0, (B.44)
thus decreases sufficiently fast with increasing R.
B.6 Appendix : Stability Analysis in terms of
distribution of fraction parasitized
Define F := 1 − exp(−cτP ∗) where P ∗ is the parasitoid equilibrium density.
Hence, F < f , is equivalent to c < − log(1 − f)/τP ∗. Thus, the cumulative
distribution for the fraction parasitized is
Probability(F < f) = Probability(c < − log(1− f)/τP ∗) =
∫ − log(1−f)/τP ∗
x=0
p(x)dx.
(B.45)
60

Differentiating it with respect to f we have the following probability distribution
of fraction parasitized
p(− log(1− f)/τP ∗)
(1− f)τP ∗ . (B.46)
B.6.1 Stability for small values of R
In the limit when R approaches one, and hence, P ∗ approaches zero, we
have at equilibrium, F = cτP ∗. As multiplication by constants do not change
coefficient of variation of a random variable, the stability conditon for values of
R close to 1 in terms of distribution of fraction parasitized is still CV 2 > 1, same
as that for the distribution of risk (Appendix B.2.1).
B.6.2 Stability for large values of R
Near f = 0, the distribution of fraction parasitized (B.46) has a slope
limf→0
p′(− log(1− f)/τP ∗)) + τP ∗p(− log(1− f)/τP ∗)
(1− f)2(τP ∗)2 = limf→0
p′(f/τP ∗) + τP ∗p(f/τP ∗)
(τP ∗)2
(B.47)
which has to be always negative for the distribution to have a mode at zero
throughout the larval stage. If we restrict our distribution of risk to the class of
distributions described in (B.23), this is only possible when n0 < 0 (i.e, p(x) →∞
as x → 0) or when n0 = 0 and 0 < n1 < 1 (i.e, p(0) is finite but p′(0) = −∞).
For both the above cases we have from Appendix B.2.2, Case 1 and 2, that the
host parasitoid equilibrium is stable for sufficiently large values of R.
Note that having a mode at zero for the distribution of fraction parasitized,
at the end of the larval stage, is only sufficient and not necessary for stability at
61

large values of R. When both p(0) or p′(0) are finite, then the above slope (B.47)
will eventually become positive, and hence a non-zero mode, for large enough τ
and P ∗. However, if p′(0) < −p(0)2 one can still get stability for large enough R
(Appendix B.2.2, Case 3).
62