
UNIVERSIDAD TECNOLÓGICA...
136
I UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL FACULTAD DE CIENCIAS DE LA INGENIERÍA CARRERA DE INGENIERÍA DE PETRÓLEOS “ESTUDIO DE LA RELACIÓN ENTRE LOS DIFERENTES NIVELES DE SHOCKS Y VIBRACIONES CON EL PERFIL DEL POZO, ENSAMBLAJE DE FONDO, FORMACIÓN Y LITOLOGÍA OBSERVADOS DURANTE LA PERFORACIÓN DE LOS POZOS PETROLEROS EN LA CUENCA ORIENTE DEL ECUADOR” TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO DE PETRÓLEOS CARLOS JAVIER MAYACELA GUADALUPE DIRECTOR: ING. BENJAMIN HINCAPIE Quito- Ecuador, 2014
Transcript of UNIVERSIDAD TECNOLÓGICA...

I
UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA
CARRERA DE INGENIERÍA DE PETRÓLEOS
“ESTUDIO DE LA RELACIÓN ENTRE LOS DIFERENTES
NIVELES DE SHOCKS Y VIBRACIONES CON EL PERFIL DEL
POZO, ENSAMBLAJE DE FONDO, FORMACIÓN Y LITOLOGÍA
OBSERVADOS DURANTE LA PERFORACIÓN DE LOS POZOS
PETROLEROS EN LA CUENCA ORIENTE DEL ECUADOR”
TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO DE
PETRÓLEOS
CARLOS JAVIER MAYACELA GUADALUPE
DIRECTOR: ING. BENJAMIN HINCAPIE
Quito- Ecuador, 2014

II
© Universidad Tecnológica Equinoccial. 2014
Reservados todos los derechos de reproducción

III
DECLARACIÓN
Yo, CARLOS JAVIER MAYACELA GUADALUPE, declaro que el trabajo aquí
descrito es de mi autoría; que no ha sido previamente presentado para ningún
grado o calificación profesional; y que he consultado las referencias
bibliográficas que se incluyen en este documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los derechos
correspondientes a este trabajo, según lo establecido por la Ley de Propiedad
Intelectual, por su Reglamento y por la normativa institucional vigente.
Carlos Javier Mayacela Guadalupe
C.I. 0603803578

IV
CERTIFICACIÓN
Certifico que el presente trabajo que lleva por título “Estudio de la relación
entre los diferentes niveles de Shocks y Vibraciones con el Perfil del pozo,
Ensamblaje de Fondo, Formación y Litología observados durante la
perforación de los pozos petroleros en la cuenca oriente del Ecuador”,
que, para aspirar al título de Ingeniero de Petróleos fue desarrollado por
Carlos Javier Mayacela Guadalupe, bajo mi dirección y supervisión, en la
facultad de Ciencias de la Ingeniería; y cumple con las condiciones requeridas
por el reglamento de Trabajos de Titulación artículos 18 y 25.
Ing. Benjamín Hincapie
DIRECTOR DEL TRABAJO
V
ÍNDICE DE CONTENIDOS
PÁGINA
1.INTRODUCCIÓN ........................................................................................................ 1
1.1. JUSTIFICACIÓN .......................................................................................... 3
1.2. OBJETIVOS DEL PROYECTO .................................................................... 4
1.2.1. OBJETIVO GENERAL .......................................................................... 4
1.2.2. OBJETIVOS ESPECÍFICOS ................................................................. 4
2MARCO TEÓRICO ...................................................................................................... 6
2.1. DEFINICIÓN DE VIBRACIÓN ...................................................................... 6
2.1.1. TIPOS DE VIBRACIONES .................................................................... 6
2.1.2. ELEMENTOS DE UN SISTEMA VIBRATORIO ..................................... 7
2.2. PROPAGACIÓN DE LAS VIBRACIONES .................................................... 8
2.2.1. TIPOS DE ONDA .................................................................................. 9
2.3. VIBRACIÓN EN LA SARTA DE PERFORACIÓN....................................... 10
2.3.1. FRECUENCIA DE VIBRACIÓN DE LAS SARTAS DE PERFORACIÓN
Y VARILLAS ....................................................................................................... 11
2.3.2. DESCRIPCIÓN CUALITATIVA DE LAS VIBRACIONES EN LA SARTA
DE PERFORACIÓN ........................................................................................... 13
2.3.3. FENÓMENOS VIBRATORIOS ............................................................ 14
2.4. AMORTIGUAMIENTO ............................................................................... 15
2.4.1. TIPOS DE AMORTIGUAMIENTO ....................................................... 16
2.5. EFECTOS EN LA BROCA A CAUSA DE LAS VIBRACIONES .................. 18
2.5.1. SALTO DE LA BARRENA (BIT BOUNCING) ...................................... 18
2.5.2. ATASCAMIENTO/DESLIZAMIENTO DE LA SARTA (STICK/SLIP) .... 18
2.5.3. ROTACIÓN NO-CONCÉNTRICA DE LA BARRENA (BIT WHIRL) ..... 19
2.5.4. ROTACIÓN NO-CONCÉNTRICA DEL APAREJO DE FONDO (BHA
WHIRL) 19
2.6. INTERACCIÓN BROCA-AGUJERO........................................................... 20
2.7. INTERACCIÓN AGUJERO/SARTA DE PERFORACIÓN ........................... 20
2.8. PRÁCTICAS DE PERFORACIÓN PARA DISMINUIR VIBRACIONES ....... 21

VI
2.9. LÍMITES DE VIBRACIÓN ........................................................................... 22
2.9.1. DERIVACIÓN ...................................................................................... 23
2.9.2. RMS- R. .............................................................................................. 23
2.10. PRÁCTICAS PARA EL DISEÑO DEL APAREJO DE FONDO ................ 25
2.10.1. MODELOS DINÁMICOS DE PERFORACIÓN ................................. 26
2.11. PASOS PARA EL DISEÑO DE LA SARTA DE PERFORACIÓN ............ 28
3.METODOLOGÍA ....................................................................................................... 31
3.1. PROCESOS Y PRÁCTICAS PARA EL DISEÑO DEL ENSAMBLAJE DE
FONDO .................................................................................................................. 31
3.2. MEDICIÓN E INTERPRETACIÓN DE LAS VIBRACIONES EN TIEMPO
REAL 34
3.2.1. INTRODUCCIÓN ................................................................................ 34
3.2.2. ACELERÓMETRO Y MAGNETÓMETRO ........................................... 37
3.3. MEDICIÓN EN SUPERFICIE ..................................................................... 41
3.4. MEDICIÓN EN EL FONDO DEL AGUJERO .............................................. 42
3.4.1. MEDICIÓN DE VIBRACIÓN TORSIONAL (STICK-SLIP) .................... 42
3.4.2. MEDICIÓN DE LA VIBRACIÓN LATERAL WHIRL (GIRO) ................. 44
3.4.3. MEDICIÓN DEL SALTO DE LA BARRENA. (BIT BOUNCING) .......... 45
3.4.4. MEDICIÓN DE LA FLEXIÓN (BENDING) ........................................... 47
3.5. MEDICIONES GRABADAS Y MEDICIONES EN TIEMPO REAL .............. 48
3.5.1. MEDICIÓN GRABADA (POST-JOB) ................................................... 49
3.5.2. MEDICIONES EN TIEMPO REAL ....................................................... 53
3.5.3. TELEMETRÍA ..................................................................................... 54
3.6. INTERPRETACIÓN ................................................................................... 56
3.6.1. TORSIONAL (STICK-SLIP) ................................................................. 56
3.6.2. LATERAL ............................................................................................ 57
3.6.3. AXIAL ................................................................................................. 58
3.7. CONTROL DE VIBRACIONES .................................................................. 59
3.7.1. AXIAL ................................................................................................. 59
3.7.2. LATERAL ............................................................................................ 61
3.7.3. TORSIONAL ....................................................................................... 63
3.8. LECTURA DE REGISTROS ELÉCTRICOS ............................................... 65
VII
3.9. OBTENCIÓN DE DATOS ........................................................................... 66
3.10. TABLAS DE VIBRACIONES ................................................................... 67
3.10.1. AUCA .............................................................................................. 67
3.10.2. LIMONCOCHA ................................................................................ 73
3.10.3. PALO AZUL ..................................................................................... 75
3.10.4. SACHA ............................................................................................ 77
4.ANÁLISIS Y RESULTADOS ..................................................................................... 84
4.1. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO AUCA. ........... 84
4.1.1. PROPUESTA DE PERFORACIÓN PARA EL POZO AUCAK12 ......... 85
4.1.2. PROPUESTA PARA EL ENSAMBLAJE DE FONDO PARA CADA
SECCIÓN DEL POZO AUCA K12 ...................................................................... 87
4.2. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO LIMONCOCHA.
89
4.2.1. Propuesta de perforación para el pozo LIMONCOCHA H ................... 90
4.2.2. Propuesta para el ensamblaje de fondo para cada sección para el pozo
Limoncocha H ..................................................................................................... 93
4.3. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO PALO AZUL. . 95
4.3.1. PROPUESTA DE PERFORACIÓN PARA EL POZO PALO AZUL N0 96
4.3.2. PROPUESTA PARA EL ENSAMBLAJE DE FONDO PARA CADA
SECCIÓN PARA EL POZO PALO AZUL N0 ...................................................... 98
4.4. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO SACHA. ....... 101
4.4.1. PROPUESTA DE PERFORACIÓN PARA EL POZO SACHA 2 ........ 101
4.4.2. PROPUESTA PARA EL ENSAMBLAJE DE FONDO PARA CADA
SECCIÓN PARA EL POZO SACHA 2 .............................................................. 104
5.CONCLUSIONES Y RECOMENDACIONES .......................................................... 108
5.1. CONCLUSIONES .................................................................................... 108
5.2. RECOMENDACIONES ............................................................................ 110
I
ÍNDICE DE TABLAS
PÁGINA
Tabla 1: Tabla de Severidad de Stick-Slip Compañía Baker Hughes. .......................... 57
Tabla 2: Tabla de Severidad de Vibraciones Laterales Compañía Baker ..................... 58
Tabla 3: Tabla de Severidades de Vibraciones Axiales Compañía Baker Hughes. ...... 59
Tabla 4: Tabulación de datos para el pozo Limoncocha B059 ..................................... 66
Tabla 5: Vibraciones Pozo Auca C11 ........................................................................... 67
Tabla 6: Vibraciones Pozo Auca 112 ........................................................................... 67
Tabla 7: Vibraciones Pozo Auca 127 ........................................................................... 68
Tabla 8: Vibraciones Pozo Auca J110 ......................................................................... 68
Tabla 9: Vibraciones Pozo Auca J153 ......................................................................... 69
Tabla 10: Vibraciones Pozo Auca J154 ....................................................................... 69
Tabla 11: Vibraciones Pozo Auca K119 ....................................................................... 70
Tabla 12: Vibraciones Pozo Auca 120D ....................................................................... 70
Tabla 13: Vibraciones Pozo Auca 121D ....................................................................... 71
Tabla 14: Vibraciones Pozo Auca 122D ....................................................................... 71
Tabla 15: Vibraciones Pozo Auca 123 ......................................................................... 72
Tabla 16: Vibraciones Pozo Auca 124D ....................................................................... 72
Tabla 17: Vibraciones Pozo Auca 124D ....................................................................... 73
Tabla 18: Vibraciones Pozo Limoncocha B57 .............................................................. 73
Tabla 19: Vibraciones Pozo Limoncocha B059 ............................................................ 74
Tabla 20: Vibraciones Pozo Limoncocha B42 .............................................................. 74
Tabla 21: Vibraciones Pozo Palo Azul N029 ................................................................ 75
Tabla 22: Vibraciones Pozo Palo Azul C48 .................................................................. 75
Tabla 23: Vibraciones Pozo Palo Azul N051H ............................................................. 76
Tabla 24: Vibraciones Pozo Palo Azul N49H ............................................................... 76
Tabla 25: Vibraciones Pozo Palo Azul N050H ............................................................. 77
Tabla 26: Vibraciones Pozo Sacha 220 ....................................................................... 77
Tabla 27: Vibraciones Pozo Sacha 276 ....................................................................... 78
Tabla 28: Vibraciones Pozo Sacha 277 ....................................................................... 78
Tabla 29: Vibraciones Pozo Sacha 278 ....................................................................... 79
Tabla 30: Vibraciones Pozo Sacha 286 ....................................................................... 79
II
Tabla 31: Vibraciones Pozo Sacha 287 ....................................................................... 80
Tabla 32: Vibraciones Pozo Sacha 240 ....................................................................... 80
Tabla 33: Vibraciones Pozo Sacha 421 ....................................................................... 81
Tabla 34: Vibraciones Pozo Sacha 422 ....................................................................... 81
Tabla 35: Vibraciones Pozo Sacha 416 ....................................................................... 82
Tabla 36: Vibraciones del campo AUCA ...................................................................... 84
Tabla 37: Ensamblaje propuesto para la sección 16” del pozo Auca k12 ..................... 87
Tabla 38: Ensamblaje propuesto para la sección 12.25” del pozo Auca k12 ................ 88
Tabla 39: Ensamblaje propuesto para la sección 8.5” del pozo Auca k12 .................... 89
Tabla 40: Vibraciones del campo LIMONCOCHA ........................................................ 89
Tabla 41: Ensamblaje propuesto para la sección 16” del pozo Limoncocha H ............. 93
Tabla 42: Ensamblaje propuesto para la sección 12.25” del pozo Limoncocha H ........ 94
Tabla 43: Ensamblaje propuesto para la sección 8.5” del pozo Limoncoha H .............. 95
Tabla 44: Vibraciones del campo PALO AZUL ............................................................ 95
Tabla 45: Ensamblaje propuesto para la sección 16” del pozo Palo Azul N0 ............... 98
Tabla 46: Ensamblaje propuesto para la sección 12.5” del pozo Palo Azul N0 ............ 99
Tabla 47: Ensamblaje propuesto para la sección 8.5” del pozo Palo Azul N0 ............ 100
Tabla 48: Vibraciones del campo SACHA .................................................................. 101
Tabla 49: Ensamblaje propuesto para la sección 16” del Pozo Sacha 2 .................... 104
Tabla 50: Ensamblaje propuesto para la sección 12.25” del pozo Sacha 2 ............... 105
Tabla 51: Ensamblaje propuesto para la sección 8.5” del pozo Sacha 2 ................... 106
III
INDICE DE FIGURAS
PÁGINA
Figura 1: Sistemas Vibratorios ....................................................................................... 8
Figura 2: Tipos de Ondas Elásticas ............................................................................... 9
Figura 3: Propagación de ondas en materiales rígidos ................................................ 10
Figura 4: Fenómenos Vibratorios en la Sarta de Perforación ....................................... 15
Figura 5: Tipos de Giro (Whirl) ..................................................................................... 19
Figura 6: Variación de amplitud y frecuencia ............................................................... 24
Figura 7: Acelerómetro ................................................................................................ 37
Figura 8: Umbrales en las cargas axiales para determinar el salto de la broca. ........... 46
Figura 9: Posicionamiento de Acelerómetros. .............................................................. 49
Figura 10: Herramienta Post - Corrida. ........................................................................ 50
Figura 11: Herramienta Post - Corrida. ........................................................................ 50
Figura 12: Medición de máximos movimientos laterales en un Acelerómetro. ............. 52
Figura 13: Medición de Rango de SS. ......................................................................... 53
Figura 14: Diagrama de Flujo del Control de Vibraciones Axiales. ............................... 60
Figura 15: Diagrama de Flujo del Control de Vibraciones Laterales. ............................ 62
Figura 16: Diagrama de Flujo del Control de Vibraciones Torsionales ......................... 64
Figura 17: Registro de vibraciones en base a la profundidad pozo Palo Azul N 049H . 65
Figura 18: Vista vertical del pozo Propuesto Auca K12 ................................................ 86
Figura 19: Vista vertical del pozo propuesto Limoncocha H ......................................... 92
Figura 20: Vista vertical del pozo Propuesto Palo Azul N0 ........................................... 97
Figura 21: Vista vertical del pozo propuesto Sacha 2 ................................................ 103
IV
ÍNDICE DE ECUACIONES
PÁGINA
Ecuación [ ] Ecuación de la frecuencia de vibración de la sarta…………………….....12
Ecuación [ ] Frecuencia natural en modo axial………………………………12
Ecuación [ ] Frecuencia natural en modo Torsional……………………………….…....13
Ecuación [ ] Amortiguamiento Viscoso…………………………………..…………….....16
Ecuación [ ] Amortiguamiento Estructural……………………………………...….……..17
Ecuación [ ] Límite de Vibración……………………………………………………..…….22
Ecuación [ ] Derivación del límite de vibración…………………………….………….....22
Ecuación [ ] RMS-R………………………………………………..………………….….…23
Ecuación [ ] Amplitud para el RMS-R……………………………….……….………….…23
Ecuación [ ] Tasa de muestreo…………………………………….……….……………24
Ecuación [ ] Severidad stick-slip…………………………………...………………....…43
Ecuación [ ] Eficiencia Torcional………………………………..….…………….….......44
Ecuación [ ] Root Mean Square…………………………………….…………………….45

V
ÍNDICE DE ANEXOS
PÁGINA
Anexo 1 ..................................................................................................................... 117
Anexo 2 ..................................................................................................................... 118
Anexo 3 ..................................................................................................................... 119
Anexo 4 ..................................................................................................................... 120

VI
RESUMEN
En este trabajo se detalla para la compañía Baker Hughes un estudio de
vibraciones axiales, torsionales y laterales, con sus distintos tipos de fenómenos
ocasionados como stick slip, bit bounce, bending y whirl durante la perforación
de pozos direccionales, el estudio de estas vibraciones para cada pozo fue en
comparación con el tipo de pozo, ensamblaje de fondo, litología atravesada
durante la perforación, su inclinación y la profundidad.
Para cada pozo de los campos Auca, Limoncocha, Palo Azul y Sacha, se
realizó la lectura de los registros eléctricos para la obtención de los diferentes
niveles de vibración para cada tipo (axiales, laterales y torsionales).
Se describe también en este trabajo los elementos de un sistema de vibración
(elemento de inercia, rigidez y amortiguamiento), lo que es la frecuencia de
vibración en la sarta de perforación, los tipos de onda, así también los efectos
que ocurre con la broca a causa de las vibraciones (salto de la broca,
atascamiento, rotación no concéntrica del ensamblaje de fondo).
Además, se recomienda las prácticas para el diseño del ensamblaje de fondo y
también que hacer si durante la perforación se detecta algún tipo de vibración,
para un control instantáneo y no llegar a tener NPT (Tiempos no productivos),
que sería un costo adicional tanto para la compañía contratista en este caso
BAKER HUGHES y también para la operadora.
Y finalmente de acuerdo al análisis de vibraciones se recomienda para cada
campo el tipo de perforación que ha sido más limpia y sin daños desde un
enfoque de los problemas de las vibraciones durante la perforación.
VII
SUMARY
This work is detailed company Baker Hughes for a study of axial vibration,
torsional and lateral, with their different kinds of phenomena caused as stick slip,
bit bounce, bending and whirl during drilling of directional wells, the study of
these vibrations for each well was compared to the type of well, assembly line,
lithology traversed during drilling, its inclination and depth.
For each well of the Auca, Limoncocha, Palo Azul fields Sacha and reading
electric logs to obtain different levels of vibration for each type (axial, lateral and
torsional) was performed.
The elements of a vibrating system (element inertia, stiffness and damping) are
also described in this paper, which is the frequency of vibration in the drill string,
the wave types, so the effects that occur with the bit due to vibration (jumping
drill, binding, non-concentric rotation of the assembly line).
Furthermore, practices for the design of the assembly line is recommended and
what to do if during drilling some kind of vibration is detected, for instant control
and not get to have NPT (non-productive times), which would be an additional
cost for both contractor for the company in this case BAKER HUGHES and also
for the operator.
And finally according to vibration analysis is recommended for each field type
drilling has been clean and undamaged from the perspective of vibration
problems during drilling.

VIII
INTRODUCCIÓN

1
1. INTRODUCCIÓN
Durante la operación de perforación es muy dificultoso evadir la vibración.
Generalmente producidos por los efectos dinámicos de manufactura como son,
el margen de espacio entre las piezas, la tolerancia, rodamiento y fricción de
contacto entre las piezas y las fuerzas desbalanceadas durante la rotación se
encuentran en todo momento. Algunas veces pequeñas e insignificantes
vibraciones pueden excitar las frecuencias de resonancia de algunas partes
estructurales y pueden ser amplificadas hacia mayores vibraciones y fuentes de
ruido.
En algunos casos las vibraciones mecánicas pueden ser usadas para trabajos
determinados, por ejemplo, se produce una vibración intencional en algunos
componentes de aplicación específica como compactadores de concreto,
perforadores de rocas, reductores de fricción, etc. En este caso las vibraciones
se deben controlar, es importante mantener el nivel de energía de las
vibraciones estable, y se debe examinar cuidadosamente su física y la
respuesta funcional para hacer componentes resistentes al esfuerzo al que es
sometido el componente.
El grado de severidad de las vibraciones y sus consecuencias sobre el proceso
de perforación dependen del diseño de la parte inferior de la sarta (BHA), de la
formación perforada, y, en gran medida, de la elección de los parámetros de
perforación, sobre todo, del peso en la barrena (WOB) y de la velocidad
rotacional de la sarta y de la barrena.
Durante el curso de las operaciones de perforación, el movimiento de la
columna de perforación dentro del pozo y la interacción de la broca con la

2
formación no deseada generan vibraciones de fondo de pozo potencialmente
dañino. En muchos casos, podemos tolerar y hacer frente a lo que se
denominan vibraciones "bajo nivel". Sin embargo, la severidad de estas
vibraciones pueden ser destructivas.
Hay una conciencia creciente en la industria de la importancia del monitoreo
estas vibraciones de perforación, como el monitoreo en tiempo real proporciona
un medio eficaz para evitar el fracaso de la sarta de perforación y los problemas
de perforación.
La capacidad para supervisar e interpretar correctamente el comportamiento de
perforación dinámica depende de un conocimiento de fondo de los problemas
de vibración y la forma en que puede ocurrir. Este conocimiento proporciona el
marco utilizado para evaluar la dinámica de los indicadores, el diagnóstico de la
causa de las vibraciones, y recomendar cual puede ser la acción correctiva.
Esta acción correctiva apropiada puede tener un impacto significativo de vida de
la herramienta MWD, de la sarta de perforación, del motor, las tasas de
perforación y la perforación.

3
1.1. JUSTIFICACIÓN
En las operaciones de perforación convencional y direccional se han registrado
numerosas vibraciones en la herramienta (BHA). El estudio de estas
vibraciones es muy importante para determinar la ubicación o el origen, estas
pueden ser producidas por las propiedades de lubricación del lodo, ubicación de
la barrena, uso de los estabilizadores, la configuración de la sarta, etc. Es por
esta razón que es necesario el estudio de shocks y vibraciones que se generan
durante la perforación de pozos.
Una de las partes más críticas que sucede en la perforación, es el diseño y
orientación del BHA (Ensamblaje de Fondo), el cual está ligado directamente
con la litología de la formación y la configuración del pozo, todas estas variables
determinan las posibles causas de las vibraciones en los diferentes puntos del
ensamblaje o donde puedan ser originadas, mediante el análisis de la relación
existente entre la litología perforada y el nivel de vibraciones observados llegará
a complementar un correcto diseño del Ensamblaje de fondo de pozo de
acuerdo al perfil del pozo a ser desarrollado.

4
1.2. OBJETIVOS DEL PROYECTO
1.2.1. OBJETIVO GENERAL
Analizar la relación entre los diferentes niveles de Shocks y Vibraciones con el
Perfil del pozo, Ensamblaje de Fondo, Formación y Litología observados
durante la perforación de los pozos petroleros en la cuenca oriente del
Ecuador.
1.2.2. OBJETIVOS ESPECÍFICOS
Analizar la relación entre la litología perforada y el nivel de Vibraciones
observado.
Contrastar la relación entre los parámetros de perforación utilizados y el
nivel de vibraciones observado
Diferenciar la relación entre los parámetros de perforación utilizados y el
comportamiento de los BHA’s de acuerdo a las formaciones perforadas
y el nivel de Vibraciones observado en las mismas.
Distinguir el efecto que tiene el cambio de configuración del BHA en
secciones y litologías similares sobre el nivel de Vibraciones observado.
5
MARCO TEÓRICO
\
6
2. MARCO TEÓRICO
2.1. DEFINICIÓN DE VIBRACIÓN
Se conoce como vibración a la difusión de ondas elásticas, las cuales producen
deformaciones y tensiones sobre un punto de equilibrio.
Es necesario recalcar que no es lo mismo oscilación que vibración ya que, la
primera se puede considerar como un movimiento repetitivo alrededor de una
posición de equilibrio, la cual será a la que se llegara cuando la fuerza que
actúa sobre él sea cero, sin necesidad que el cuerpo sufra deformación,
mientras que vibración es una fluctuación del movimiento de un sistema que se
encuentra en estado de equilibrio.
2.1.1. TIPOS DE VIBRACIONES
2.1.1.1. Vibración determinística
La vibración determinística es un tipo de vibración que puede ser caracterizada
de manera precisa, un claro ejemplo es la vibración generada por una unidad
de bombeo.
2.1.1.2. Vibración aleatoria
Este tipo de vibración solo puede ser analizada estadísticamente, se produce
cuando el movimiento de las partículas es muy irregular, por ejemplo la
7
vibración producida el momento que hay un atascamiento intermitente en una
unidad de bombeo.
2.1.2. ELEMENTOS DE UN SISTEMA VIBRATORIO
Un sistema vibratorio en general está constituido de tres elementos.
Elemento de inercia que es el encargado de almacenar y liberar energía
cinética
Elemento de rigidez que es el encargado de almacenar y liberar energía
potencial.
Elemento de amortiguamiento o disipación ayuda a perder energía
Es necesario también considerar los siguientes puntos para analizar las
vibraciones:
Fuerzas y momentos externos
Alteraciones externas
Cada uno de estos elementos tiene características diferentes de excitación y
respuesta siendo la primera una fuerza y la segunda un desplazamiento,
velocidad o aceleración.
8
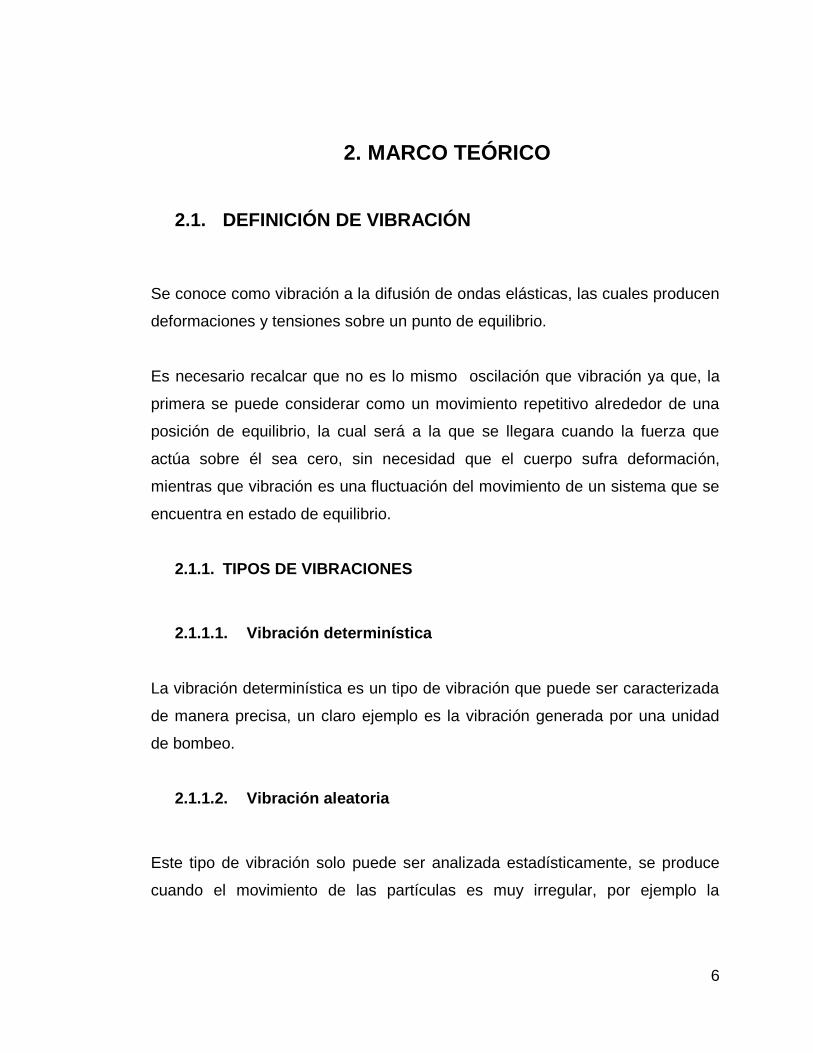
Figura 1. Sistemas Vibratorios
Fuente: (FANCHI, 2006)
2.2. PROPAGACIÓN DE LAS VIBRACIONES
Las vibraciones se propagan por medio de ondas de propagación. “La forma por
el cual una vibración viaja a través de un sistema es conocido como onda de
propagación. Cuando una fuerza externa está afectando un cuerpo elástico en
la vida real, el cuerpo no reacciona instantáneamente en la totalidad de su
longitud. El punto inmediato debajo de la fuerza reacciona primero y
consecuentemente las secciones justo debajo a la sección previa a la reacción
y así sucesivamente. Esta serie de reacciones son llamadas propagación de
onda por que las reacciones se propagan a través del cuerpo por un periodo de
tiempo a una velocidad específica. Si la tasa de cambio en la fuerza es baja
entonces un análisis de equilibrio estático puede modelar las reacciones
adecuadamente para muchas aplicaciones en ingeniería, esto es nombrado
como análisis de cuerpo rígido. Si por el contrario la fuerza externa cambia
rápidamente entonces un análisis de propagación de onda es necesario para
modelar las reacciones efectivamente”.(Cheser, 2010)

9
2.2.1. TIPOS DE ONDA
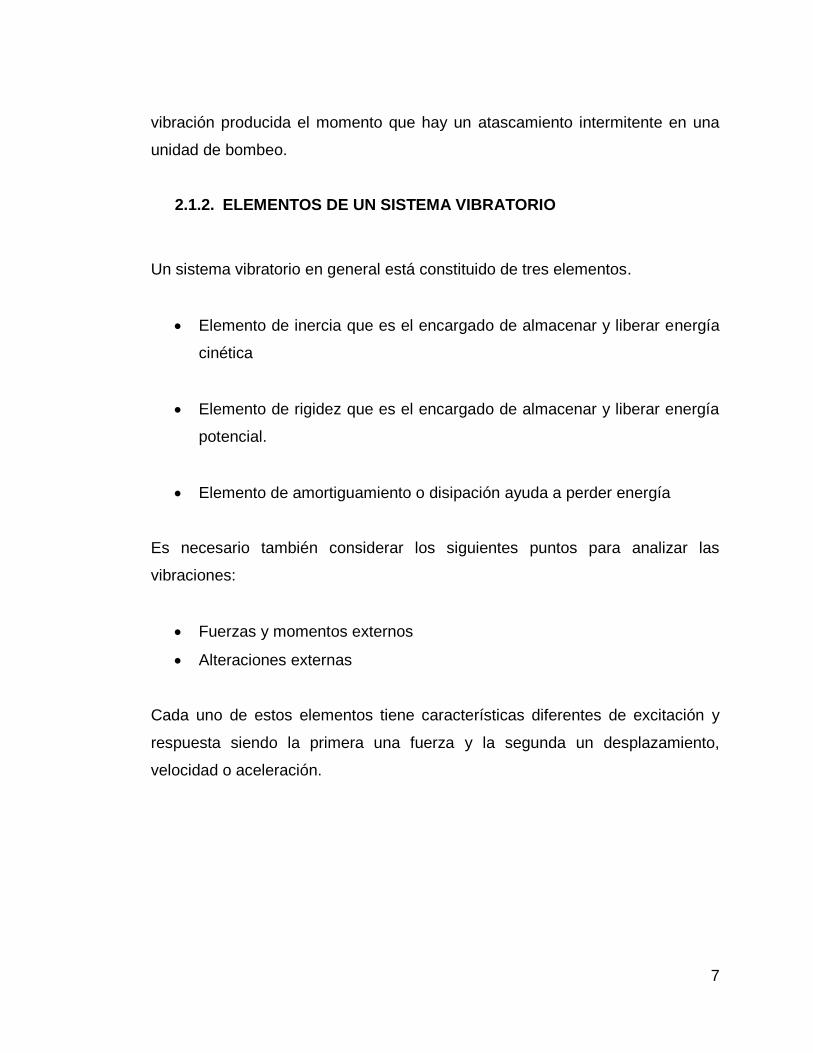
Figura 2. Tipos de Ondas Elásticas
Fuente: (FANCHI, 2006)
2.2.1.1. Ondas longitudinales
Son ondas también llamadas de compresión/tensión, axiales, de dilatación y no
rotacionales, se producen cuando hay una fuerza que empuje el medio elástico
y como reacción a ella habrá un movimiento paralelo al movimiento de las
ondas, frecuentemente las ondas viajan aproximadamente a 5,121 m/s y sobre
todo no se dispersan.

10
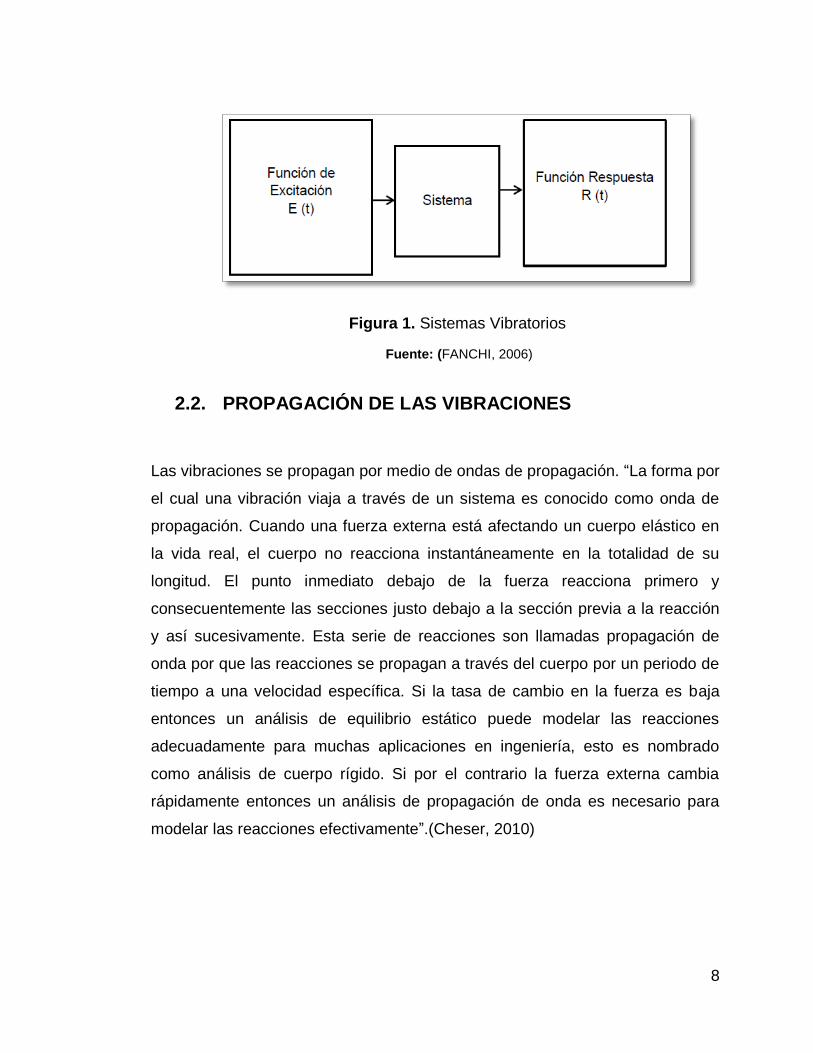
Figura 3. Propagación de ondas en materiales rígidos
Fuente: (CEDEX, 2001)
2.2.1.2. Ondas laterales
Son llamadas también como ondas de cizalla, torsionales, transversales y
distorsiónales. El movimiento de las partículas es perpendicular al movimiento
de las ondas, frecuentemente las ondas viajan a una velocidad aproximada de
3,170 m/s, estas ondas no se dispersan.
En la industria Petrolera se estudia las ondas en grupos definidos como
longitudinales, torsionales y laterales
2.3. VIBRACIÓN EN LA SARTA DE PERFORACIÓN
Es la energía mecánica que emite la sarta de perforación el momento que el
sistema percibe un desbalance al atravesar la roca. Es la suma de la energía
necesaria para perforar la roca es decir dependerá de los siguientes factores:
Peso sobre la Barrena
Velocidad de rotación
Gasto de lodo
11
Fricción contra las paredes del agujero, etc.
Las vibraciones hacen que el sistema tienda al equilibrio es por ello que se
libera energía mediante estos y produciendo impactos cuando las vibraciones
sobrepasan el radio del pozo lo cual es un breve indicador que hay problemas
en el pozo.
2.3.1. FRECUENCIA DE VIBRACIÓN DE LAS SARTAS DE
PERFORACIÓN Y VARILLAS
La sarta de perforación es un cuerpo en el que se aplican varios disturbios, por
esta razón reacciona y vibra, a esta acción se la llama frecuencia natural, la
cual terminará de ocurrir el momento que deje de aplicarse dicho disturbio.
Esto dependerá de las propiedades del material y la geometría del cuerpo ya
que las propiedades del material determinan la velocidad de la onda y la
geometría determina como las ondas se reflejan y refractan.
El momento que se produce una onda al inicio del cuerpo, viaja y llega hasta el
otro extremo, pero habrá el caso en el que la onda retornará a su lugar de
origen mientras una nueva se esté produciendo.
Esto generará que se sincronicen en una sola y si sus ondas de reflexión
retornan a su origen al mismo tiempo se producirá una tercera onda las cuales
se combinaran y así sucesivamente en tanto que, a mayor número de ondas
mayor amplitud de la onda resultante esto da lugar a la llamada resonancia.
12
√
Ec. [1]
Dónde:
Frecuencia natural (
Constante de rigidez
La masa (Kg)
2.3.1.1. Frecuencia natural de un Drill Collar
Para un dril collar con sección transversal uniforme y material de acero se utiliza
la siguiente ecuación para calcular su frecuencia natural:
2.3.1.1.1. Frecuencia natural en modo axial
Ec. [2]
Dónde:
Frecuencia en modo axial (
: Modo de vibración natural
: Modulo de elasticidad
: Longitud
Velocidad de la onda de compresión

13
2.3.1.1.2. Frecuencia natural en modo Torsional
√
Ec. [3]
Frecuencia natural en modo Torsional (
Coeficiente de deformación del acero 10.650 (
: Longitud
Densidad
2.3.2. DESCRIPCIÓN CUALITATIVA DE LAS VIBRACIONES EN LA
SARTA DE PERFORACIÓN
Las vibraciones en el sistema son producidas por el contacto de la barrena con
las formaciones y la sarta de perforación con la pared del agujero, Además
otras causas como la curvatura de la tubería debido a su larga extensión por
esta razón se produce un des alineamiento que causa o incrementa la
severidad en las vibraciones generando movimientos axiales, laterales y
torsionales en la barrena y en la sarta de perforación.
2.3.2.1. Vibraciones axiales
Es la principal causa de la disminución del ROP (rata de penetración),
produciendo saltos en la tubería y evitando tener un peso uniforme sobre la
broca lo cual puede causar daños en la misma, principalmente cuando se está
atravesando la formación con una broca ticónica. Es fácilmente detectado en
pozos de poca profundidad ya que se evidencia al mostrar fluctuaciones en la
14
carga del gancho y saltos en el top drive o Kelly según el equipo de perforación;
mientras que a pozos con gran profundidad las vibraciones se hacen presentes
con menor severidad incluso en pozos direccionales a pesar de que el daño en
fondo persista, por esta razón se necesitará un sistema que detecte las
vibraciones tenues que llegan a superficie.
2.3.2.2. Vibraciones torsionales
Producen ondas que viajan de la barrena a la superficie y retornan a su origen,
lo cual es la principal causa de que la barrena rote irregularmente produciendo
una caída en la eficiencia de la perforación y fallas en las conexiones de la
tubería. El momento que la broca deja de girar a su verdadera velocidad se va
acumulando energía lo cual representa un peligro al momento de liberarse. El
problema persistirá mientras los parámetros de perforación continúen o pare.
2.3.2.3. Vibraciones laterales
Se producen cuando la broca o estabilizadores no giran en el eje del radio del
pozo lo cual genera golpes contra las paredes del pozo y por ende un aumento
en el diámetro, lo cual es difícil identificar en superficie y tomar acciones por ello
reduce la vida del aparejo de fondo y reduce el ROP para lo cual se debe
minimizar las vibraciones.
2.3.3. FENÓMENOS VIBRATORIOS
Existe una serie de movimientos que pueden producirse en el pozo, los cuales
generan otro movimiento resultante que normalmente es llamado respuesta
paramétrica, como se puede observar en la siguiente figura.

15
Figura 4. Fenómenos Vibratorios en la Sarta de Perforación
Fuente: (D.K. ASHLEY)
2.4. AMORTIGUAMIENTO
Es la expansión de la energía debido al tiempo y a la distancia, esta es la razón
por la cual la resonancia no permanece continua por un tiempo indefinido. El
amortiguamiento reduce la energía provocada por la vibración esto ayuda a los
sistemas porque de lo contrario se produciría una falla estructural.
16
2.4.1. TIPOS DE AMORTIGUAMIENTO
2.4.1.1. Amortiguamiento viscoso
Se produce cuando la velocidad de las partículas se presenta en forma
perpendicular a la fuerza de amortiguamiento, la cual se puede calcular con la
siguiente ecuación:
Ec. [4]
Dónde:
Amortiguamiento viscoso (
Coeficiente de amortiguamento
= Diferencial del desplazamiento con respecto al tiempo
2.4.1.2. Amortiguamiento Coulomb
Se produce cuando dos superficies secas se deslizan entre si produciendo una
fuerza que dependerá del coeficiente de, la velocidad y desplazamiento de las
partículas y la fuerza normal de las caras en contacto, se obtiene el valor de
esta fuerza mediante la siguiente ecuación:
Ec.[5\]
Dónde:
Amortiguamiento Coulomb (

17
Factor de fricción
Fuerza normal (N)
2.4.1.3. Amortiguamiento estructural
Se produce cuando la estructura interna reacciona debido a la fricción que se
genera dentro del sistema ya que las ondas se moverán continuamente y
debido a ello la energía se irá perdiendo. Se obtiene con la siguiente ecuación:
Ec. [5]
Dónde:
Amortiguamiento estructural
Longitud de oscilación (pies)
Frecuencia de oscilación
= Diferencial del desplazamiento con respecto al tiempo
Es importante conocer los valores de las frecuencias naturales y axiales de
acuerdo al diseño para evitar posibles fallas en el material producidos cuando la
velocidad de las frecuencias naturales se igualan. O identificar el nivel de las
ondas de compresión y deformación para conocer las frecuencias a las cuales
se debe operar y evitar resonancias.
18
2.5. EFECTOS EN LA BROCA A CAUSA DE LAS
VIBRACIONES
2.5.1. SALTO DE LA BARRENA (BIT BOUNCING)
Es cuando el aparejo de fondo se mueve en su propio eje de arriba hacia abajo
o viceversa ocasionando que la broca golpee el fondo del pozo, es más
frecuente cuando se opera con una broca tricónica, cuando se perfora fuera del
camino de la zapata o en formaciones muy duras.
2.5.2. ATASCAMIENTO/DESLIZAMIENTO DE LA SARTA (STICK/SLIP)
Se produce cuando la sarta de perforación no tiene una velocidad de rotación
constante, lo cual genera un torque y un giro de la misma. Generalmente se
produce cuando la desviación del pozo es muy pronunciada y la broca no es la
adecuada para el tipo de formación por el que se esté atravesando. De este
inconveniente en el pozo el personal del taladro podrá darse cuenta por medio
de los valores reflejados de los diferentes parámetros como el torque y en las
RPM.
Una óptima solución al presentarse dicho problema es bajar el peso de la sarta
y las revoluciones por minuto además de ello reducir la fricción por medio de
escariadores y suavizando el perfil del pozo aumentando la lubricidad por medio
de la correcta aplicación de lodos de perforación.

19
2.5.3. ROTACIÓN NO-CONCÉNTRICA DE LA BARRENA (BIT WHIRL)
Es cuando la broca gira fuera del centro de su eje topando las paredes del pozo
y provocando deformaciones en la geometría del pozo, se produce con mayor
facilidad el momento que se atraviesa por formaciones intermedias y duras y en
barrenas PDC con cortadores laterales muy agresivos. La broca sufrirá daños
que serán evidenciados el momento de finalizar el viaje.
2.5.4.
2.5.5. ROTACIÓN NO-CONCÉNTRICA DEL APAREJO DE FONDO (BHA
WHIRL)
Se produce cuando la sarta de perforación gira fuera de su centro, sin un eje
fijo, ni orden de giro, se torna más severo cuando el lodo de perforación no es el
adecuado. La detección en superficie puede ser alcanzada indirectamente
cuando este movimiento induce al bit Bouncing o la revisión de los
componentes de la sarta de Perforación después de las corridas. Mientras que
cuando se observa que los estabilizadores presentan desgastes laterales es
sinónimo que se está presentando el BHA Whirl.
Figura 5. Tipos de Giro (Whirl)
Fuente: (D.K. ASHLEY)
20
2.6. INTERACCIÓN BROCA-AGUJERO
Esta interacción se verá reflejada mediante los siguientes parámetros:
Velocidad de la broca
Dureza de la roca
Los cuales deberán ser meticulosamente definidos puesto que determinarán
una perforación exitosa y además una eficiencia o pérdida de la broca.
2.7. INTERACCIÓN AGUJERO/SARTA DE PERFORACIÓN
Es necesario conocer los puntos clave sensibles que se tendrá en la sarta de
perforación para así diseñar una correcta operación mitigando efectos
adversos. Muchos estados pueden estar acompañados por pandeo y
vibraciones extremas de la sarta de perforación cuando sus frecuencias
naturales igualan la velocidad angular de rotación.
Es importante no únicamente establecer las velocidades críticas de rotación de
las barrenas de perforación, si no también identificar los estados de Flexión o
pandeo, el cual permitirá encontrar regiones de interacción entre la sarta y la
pared del agujero y calcular la reacción de tales interacciones.(Craig, 2010)
21
2.8. PRÁCTICAS DE PERFORACIÓN PARA DISMINUIR
VIBRACIONES
Es importante siempre poner mucha atención al correcto uso de los
lodos de perforación, porque estos representan un papel importante a
la hora de tener un pozo estable. Se puede tener éxito diseñando
correctamente el peso que el lodo deberá poseer, para que el
momento que se presenten dichas vibraciones el pozo permanezca lo
suficientemente estable y se evite atascamientos de la barrena.
Opere correctamente la broca durante el periodo de interrupción de
las operaciones y después de cada conexión.
Realizar un correcto uso y diseño de los lodos de perforación
Conservar la calidad del lodo durante toda la operación considerando
que una práctica muy común es añadir aceite o diesel formando una
emulsión mientras se mezclan los lodos.
Usar escariadores para reducir el torque de la barrena.
Procurar que se forme un emboquillamiento mientras se realiza la
perforación ya que con ello se logrará un agujero más liso que ayudara
a evitar que el aparejo de fondo interactúe con la pared del pozo y se
formen vibraciones.
Evitar la resonancia causada por la constante presencia de
vibraciones.
22
Procurar que el radio del pozo sea constante, evitando formar un pozo
tortuoso.
Tener la configuración correcta de la sarta de Perforación.
Diseñar correctamente el aparejo de fondo y sobretodo estimar el
número de preciso de estabilizadores a utilizar según la desviación del
pozo.
Evitar doglegs al perforar el pozo.
Controlar los parámetros de perforación en tiempo real para una buena
toma de decisiones.
Utilizar sistemas suavizadores de torque
Utilizar sistemas de amortiguamiento en el fondo del pozo ubicados en
la parte superior de la broca los cuales ayudarán a evitar las
vibraciones axiales.
Establecer un límite de vibración
2.9. LÍMITES DE VIBRACIÓN
Es necesario establecer un límite de vibración lo cual indicará la cantidad de
energía de vibración de la herramienta que está expuesto. Parámetro que se
podrá calcular con la siguiente ecuación.
√
Ec. [6]

23
Dónde:
= Cantidad de energía de vibración de la herramienta que está expuesto
= Amplitud de choque
=Duración del impulso de choque. (Seg)
2.9.1. DERIVACIÓN
El impulso del choque se supone que es triangular, y para tener una duración
de TD segundos el período de muestreo para medir el pulso debe ser inferior a
la mitad de la duración del impulso, que conduce a una tasa de muestreo
requerida de:
Ec. [7]
S= Muestras por segundo
=Duración del impulso de choque (Seg)
2.9.2. RMS- R.
Brinda una señal digitalizada a través de un periodo de muestreo y se puede
calcular con la siguiente ecuación.
√ [ ]
Ec. [8]
24
Dónde:
ΔT= Intervalo de muestreo (Seg)
m= Número de mediciones en el periodo de muestreo
A= Amplitud de una señal
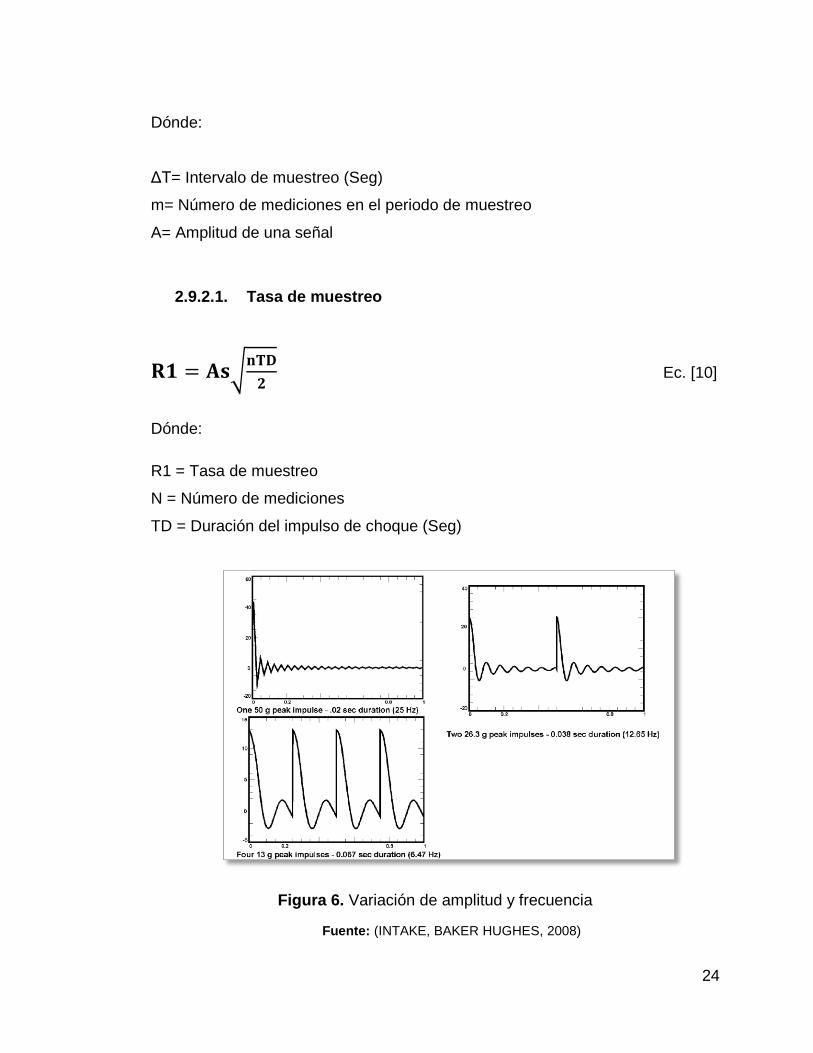
2.9.2.1. Tasa de muestreo
√
Ec. [10]
Dónde:
R1 = Tasa de muestreo
N = Número de mediciones
TD = Duración del impulso de choque (Seg)
Figura 6. Variación de amplitud y frecuencia
Fuente: (INTAKE, BAKER HUGHES, 2008)

25
2.10. PRÁCTICAS PARA EL DISEÑO DEL APAREJO DE
FONDO
Continuamente se han presentado problemas durante la perforación de los
pozos debido al incorrecto diseño del aparejo de fondo, la alta presencia de
vibraciones y la reducción de la rata de penetración lo cual requiere más
tiempo de perforación y por ende más costos, ya que al dañarse es necesario
realizar viajes para reemplazar las herramientas. Los más comunes son los
RSS (Rotary Steerable System), herramientas LWD y MWD, que muchas veces
provocan el abandono del pozo debido a la difícil tarea que representa
pescarlas.
Por estas razones los departamentos de ingeniería se han visto en la necesidad
de incrementar un sistema (software) que aplicando modelos matemáticos del
comportamiento dinámico y mecánico del aparejo de fondo diseñe un correcto
ensamblaje tomando en cuenta las diferentes curvaturas del pozo, direcciones y
configuraciones las cuales han llegado a ser tan comunes debido a la
complejidad de las ubicaciones, debido a que el tiempo de perforación que se
puede perder con estos inconvenientes juega un papel muy importante al
momento de evaluar la rentabilidad de un proyecto.
La simulación en dichos software permitirán conocer las posibles fallas que se
tendrá con un diseño establecido, detectando así las fallas y evitándolas para la
puesta en marcha, lo cual debe formar una combinación correcta que ayude a
obtener una perforación exitosa sin tiempos no productivos.
Hay que tomar en cuenta que todo software está programado mediante
modelos matemáticos, los cuales validarán información siempre y cuando los
resultados generados a través de él sean coherentes con las observaciones de
campo, y sobretodo estableciendo siempre un rango de incertidumbre, gracias a
26
que actualmente las mediciones de las vibraciones se realizan en tiempo real y
con sistemas de fondo que permiten tomar datos precisos e interpretar los
resultados obtenidos.
2.10.1. MODELOS DINÁMICOS DE PERFORACIÓN
2.10.1.1. Herramientas de ingeniería
Las herramientas de ingeniería son diseñadas para su uso diario, proveen
estimaciones de parámetros importantes para propósitos de planeación y
diseño, tal como frecuencias naturales y cargas de flexión.
2.10.1.2. Herramientas de búsqueda
Las herramientas de búsqueda describen la física del problema y son más
poderosas. Estas herramientas permiten estudiar fenómenos complejos a gran
detalle, pero requieren una gran inversión de tiempo y esfuerzo. Ambos tipos de
modelo requieren de validación, pruebas de laboratorio así como también
pruebas controladas de campo.
Una vez que los modelos han sido establecidos pueden ser utilizados de
diferentes maneras, incluyendo el diseño de componentes, el diseño de
aparejos de fondo y la investigación de las contribuciones de cada componente
sobre el sistema de perforación.
La aplicación de los modelos dinámicos muy complejos han aportado buenas
lecciones como realizar:
Diseño de barrenas PDC, las cuales pueden ser ajustadas para
minimizar el impacto del daño a los cortadores.

27
Diseños de las barrenas ticónicas que pueden ser ajustados para reducir
la tendencia de su giro excéntrico.
Estabilización del aparejo de fondo de la Sarta de perforación, la cual
puede ser optimizada protegiendo la sensibilidad del equipo de fondo.
Diseños del aparejo de fondo para evitar la inestabilidad que pueda
causar una rápida destrucción de la barrena;
Establecer parámetros de operación que permitan mejorar el
comportamiento sub-óptimo de los sistemas de perforación.
Definir claramente las mejores combinaciones entre el aparejo de fondo
y la barrena para cada sección planeada del pozo
Realizar un correcto diseno de los parámetros de perforación los cuales
permitirán reducir o eliminar la ocurrencia de impactos y vibraciones;
Utilizar una combinación de software de modelado y la experiencia de
perforaciones en pozos adyacentes.

28
2.11. PASOS PARA EL DISEÑO DE LA SARTA DE
PERFORACIÓN
Se podrían definir seis pasos de la fase de planeación de la siguiente
manera:
1. Reunir y evaluar los datos de pozos adyacentes para identificar
cualquier área de problema y definir los elementos importantes para un
mejor análisis. La optimización de la barrena es uno de los factores
críticos en cuanto a impactos. Un experto en barrenas deberá incluirse
en esta etapa para determinar el comportamiento anterior de la barrena
y recomendar áreas donde se pueda mejorar. La comunicación
adecuada con el fabricante de dichas herramientas es esencial para
asegurar que el comportamiento y especificaciones de las herramientas
han sido totalmente comprendidas. Los fabricantes de las barrenas han
desarrollado software de asistencia en el proceso de planeación de sus
barrenas.
2. El segundo paso es la evaluación de la estabilización del aparejo de
fondo. Un análisis se realiza con el propósito de evaluar los aparejos de
fondo y finalmente ubicar de la mejor manera los estabilizadores y
establecer los principales parámetros de perforación para evitar
impactos de gran magnitud. Esta fase de planeación tal vez requerirá un
enfoque de colaboración, incorporando la participación de los
fabricantes de las barrenas y los ampliadores, ensamblando todos los
datos iniciales para un análisis exitoso.
3. Establecer una adecuada comunicación con el equipo de campo antes
de comenzar con las operación de perforación para determinar con
exactitud los puntos donde se transmitirá la información a superficie y la
29
frecuencia en la que serán transmitidos; el objetivo de este punto es
adquirir la suficiente información para un efectivo análisis de las
vibraciones sin sacrificar la calidad de la información típica de las
herramientas LWD (registros durante la perforación).
4. Si una ampliación del agujero mientras se perfora (HEWD, Hole
Enlargement While Driling) se planea tendrá que incluirse la
configuración de la herramienta de ampliación y su disposición en la
sarta de perforación con base en las experiencias y los resultados del
modelado, el uso de los estabilizadores por encima y por debajo de los
ampliadores, para mantener al minino posible el desplazamiento lateral,
es una recomendación muy buena para esta operación.
5. Los ingenieros deberán entender los conceptos físicos detrás de los
impactos y vibraciones, así como también los métodos de interpretación
de las mediciones provenientes de las herramientas MWD y LWD, se
deberán entrenar en la identificación de los tipos y fuentes de las
vibraciones esto con la finalidad de que puedan proveer una solución
adecuada para las vibraciones antes de que ocurra un daño significativo.
6. Establecer los límites máximos y aceptables de los niveles de vibración
en cada proyecto; antes de la fase de ejecución de cada proyecto, se
deberá emplear un análisis de riesgo para establecer que niveles de
vibración requerirán atención y que niveles de vibración se consideraran
como niveles aceptables.(Craig, 2010)
30
METODOLOGÍA

31
3. METODOLOGÍA
3.1. PROCESOS Y PRÁCTICAS PARA EL DISEÑO DEL
ENSAMBLAJE DE FONDO
Las fallas de los componentes de la sarta de perforación como son los RSS
(Rotary Steerable System), herramientas LWD y MWD tiene como resultado
Tiempo No Productivo (NPT, por sus siglas en inglés) debido a los viajes
necesarios para reemplazar el equipo dañado. En algunas ocasiones el equipo
dañado puede resultar en el abandono del pozo, debido a que las operaciones
de pesca o desviación han fallado previamente a la toma de decisión de
abandonar el pozo. En adición a estos eventos no programados la vibración
puede causar la considerable disminución de la Tasa de Penetración (ROP, por
sus siglas en ingles), factor importante para la evaluación de la perforación.
El incremento de la complejidad de los ensamblajes de fondo y las
configuraciones direccionales de los pozos han creado la necesidad del
desarrollo de software específico de diseño en la ingeniería de perforación, así
como de modelos matemáticos del comportamiento mecánico y dinámico de los
aparejos de fondo sometidos a diferentes condiciones de operación en el fondo
del agujero como son, las diferentes curvaturas del pozo, direcciones y
configuraciones las cuales han llegado a ser tan comunes debido a la
complejidad de las ubicaciones.
La importancia en la predicción del comportamiento de la sarta de perforación
en condiciones estáticas y dinámicas se ha acrecentado en los últimos años
debido a la importancia que ha tomado, tanto en los proyectos, como en la
eficiencia de las operaciones y el cumplimiento de las tiempos establecidos de
cada operación, lo que puede hacer la diferencia entre un proyecto rentable y
no rentable.
32
Los beneficios de la aplicación de modelos matemáticos para analizar el
comportamiento mecánico de los ensamblajes de fondo de la sarta de
perforación en la fase de diseño es prioritaria y se debe tomar como una
práctica común en cualquier circunstancia, haciendo énfasis en aquellas donde
los tiempos no productivos tengan un impacto considerable en la rentabilidad
del proyecto. Una gran gama de escenarios pueden ser investigados,
comparados y analizados, esta amplia cantidad de escenarios conducirán a una
optimización del diseño del aparejo de fondo, el cual tendrá como principio de
diseño el no ser susceptible a fallas mecánicas relacionadas a excesos en las
fuerzas estáticas y dinámicas las cuales excedan las especificaciones del
equipo del que está constituido.
Sin embargo este enfoque solo será exitoso si el modelo puede ser confiable y
sus predicciones son exactas, o aceptables dentro de un rango de certidumbre
preestablecido. Para considerar que un modelo matemático es confiable, la
comparación de los resultados que se obtengan a partir del modelo dinámico
deberá ser validada con las mediciones y observaciones de campo, esto es la
clave para la validación del modelo.
En el pasado, las mediciones dinámicas en superficie eran usadas para verificar
las predicciones de los modelos, sin embargo el problema con este tipo de
mediciones, particularmente en el caso de las vibraciones laterales, es que las
mediciones son tomadas a una gran distancia de donde son generadas o donde
realmente están ocurriendo, por lo tanto la exactitud y aplicación de estas
mediciones para propósitos de verificación del modelo son limitadas
principalmente en los problemas de las vibraciones axiales y torsionales.
Los modelos dinámicos de perforación juegan un papel importante en la
optimización del proceso de perforación. Estos modelos pueden ser clasificados
33
como Herramientas de ingeniería y herramientas de búsqueda, dependiendo de
su funcionalidad.
Las herramientas de ingeniería son diseñadas para su uso diario, proveen
estimaciones de parámetros importantes para propósitos de planeación y
diseño, tal como frecuencias naturales y cargas de flexión. Las herramientas de
búsqueda describen la física del problema y son más poderosas. Estas
herramientas permiten estudiar fenómenos complejos a gran detalle, pero
requieren una gran inversión de tiempo y esfuerzo. Ambos tipos de modelo
requieren de validación, pruebas de laboratorio así como también pruebas
controladas de campo.
Una vez que los modelos han sido establecidos pueden ser utilizados de
diferentes maneras, incluyendo el diseño de componentes, el diseño del
ensamblaje de fondo y la investigación de las contribuciones de cada
componente sobre el sistema de perforación.
La aplicación de los modelos dinámicos muy complejos han aportado buenas
lecciones y algunos ejemplos que se pueden incluir son: diseño de barrenas
PDC, las cuales pueden ser ajustadas para minimizar el impacto del daño a los
cortadores, los diseños de las brocas triconicas pueden ser ajustados para
reducir la tendencia de su giro excéntrico; la estabilización del aparejo de fondo
de la sarta de perforación puede ser optimizada protegiendo la sensibilidad del
equipo de fondo; los diseños del ensamblaje de fondo que son inestables
pueden causar una rápida destrucción de la broca; los parámetros de operación
pueden ser ajustados para mejorar el comportamiento sub-óptimo de los
sistemas de perforación.
La fase de planeación deberá claramente definir las mejores combinaciones
entre el ensamblaje de fondo y la broca para cada sección planeada del pozo y
los parámetros de perforación deberán reducir o eliminar la ocurrencia de

34
impactos y vibraciones; para validar el plan esta fase tendría que utilizar una
combinación de software de modelado y la experiencia de perforaciones en
pozos adyacentes.
3.2. MEDICIÓN E INTERPRETACIÓN DE LAS VIBRACIONES
EN TIEMPO REAL
3.2.1. INTRODUCCIÓN
Desde que las mediciones de vibraciones en el fondo del pozo fueron
introducidas a principios de los años 90, este tipo de mediciones han sido de
gran ayuda para mejorar la eficiencia de la perforación alrededor del mundo.
Usualmente el personal encargado de las herramientas de medición MWD
(Measurement While Drilling) programa, configura y en ocasiones arma la
herramienta en el piso de perforación, para enviar a la superficie los valores
obtenidos en el fondo del agujero de las vibraciones axiales, torsionales y
laterales. Estos valores se muestran en superficie en pantallas ubicadas en
el piso de perforación o centros remotos de operación. Los valores son
analizados en el mismo piso para obtener la severidad de las vibraciones y
así poder determinar un mecanismo de impacto en particular o alguno que
afecte al aparejo de fondo de perforación.
Como se ha mencionado anteriormente, las vibraciones axiales que se
caracterizan por la inestabilidad en la broca se despliegan en la pantalla del
monitor como fluctuaciones en los ejes de medición. Mediciones recientes
han arrojado que si se presenta un movimiento lateral severo, se puede
observar una elevación en los indicadores de torsión y una mayor
interacción del aparejo de fondo de perforación con la pared del pozo. En
algunas ocasiones fuertes movimientos laterales se ven acompañados en
35
algunos tipos de movimientos axiales por lo cual se presenta un giro en la
broca.
Las vibraciones torsionales se observan cuando se presenta el fenómeno
Atascamiento-Deslizamiento. Es decir, cuando los movimientos torsionales
son fuertes, están acompañados de movimientos laterales los cuales
provocan un giro en el aparejo de fondo de perforación. Una alta amplitud y
una permanencia en los movimientos torsionales y laterales es una manera
de identificar el nivel de giro que se presenta en el aparejo de fondo de
perforación. Una gran amplitud y un patrón consistente usualmente se
refieren a un movimiento de giro en dirección a la rotación, y cuando se
presentan movimientos eventuales que representan alguna elevación en la
medición de las vibraciones laterales refiere a un giro en dirección contraria
a la de rotación, elevaciones masivas en ambos casos representan un
movimiento caótico en la sarta de perforación
El movimiento en el aparejo de fondo de perforación es monitoreado por un
conjunto determinado de acelerómetros en la herramienta MWD.
Usualmente tres acelerómetros son montados en forma ortogonal, uno
medirá los movimientos axiales y los otros dos los movimientos
transversales.
Se pueden colocar acelerómetros extras en conjunto con el uso de
magnetómetros, para obtener el rango total de rotación, tomando el eje “Z” a
lo largo del agujero y el eje “X” y “Y” en forma transversal a este se pueden
medir la aceleraciones axiales en Z y las aceleraciones transversales de los
componentes “X” y “Y” en diferentes tiempos. Esta información es
transmitida a la superficie en tiempo real y un registro complejo se puede
obtener con el análisis posterior de la herramienta MWD. Un punto
importante es, que durante la perforación los instrumentos sufren de

36
rotación, por lo tanto las mediciones de las aceleraciones transversales
serán tomadas en referencia a un fragmento de la rotación. Esto es lo más
lejos que se han llegado a reflejar las fuerzas mecánicas que sufre el
equipo, pero aún es complicado la visualización y el análisis del movimiento
en la sarta de perforación.
Los choques axiales interfieren directamente con las operaciones de
perforación (broca, salto), y en profundidades someras este fenómeno es
detectado por el perforador. Estas vibraciones generalmente se producen
por la interacción entre la broca tricónica y la formación, este problema se
presenta rara vez con brocas PDC. Elementos de amortiguamiento pueden
ser incluidos en el diseño del aparejo de fondo de perforación, los cuales
pueden reducir daños potenciales. Debido a las grandes masas que se
encuentran en movimiento, la grabación de aceleraciones axiales es menor
que la grabación de las mediciones torsionales. Por otra parte, los equipos
utilizados en la operación de perforación contienen limitantes más exigentes
para las vibraciones axiales comparada con las transversales.
Las Vibraciones torsionales causadas principalmente por el Stick-Slip
durante la perforación, son amortiguadas, ambas por la rigidez torsional de
la sarta de perforación y la fricción en contra de la pared del pozo y el
revestimiento del mismo. El amortiguamiento no es tan fuerte para los
movimientos axiales, y por lo tanto el Stick-Slip puede ser detectado en
superficie aún en pozos altamente desviados y estos pueden ser reducidos
o removidos con la intervención del perforador. Las vibraciones torsionales
no pueden ser leídas directamente a partir de los datos del acelerómetro, sin
embargo la diferencia que se observan en la variación de Δx (t) y Δy (t)
pueden ser un buen indicador de la severidad del problema. La información
adicional se puede obtener a partir de las mediciones directas en la rotación
de la sarta de perforación o en el uso de sensores magnéticos.

37
Las aceleraciones más fuertes que se presentan en la sarta de perforación
son generalmente grabadas en la dirección transversal. Los choques
provocados por estas aceleraciones pueden causar un movimiento
excéntrico del aparejo de fondo alrededor del pozo. Esto forma un patrón de
vibración helicoidal en la sarta de perforación. Sin embargo, la geometría del
pozo puede causar patrones de vibración transversal. Debido a que las
Medición e Interpretación de las Vibraciones en Tiempo Real vibraciones
pueden acoplarse una con otra, otro tipo de movimientos pueden resultar en
una aceleración lateral, y puede provocar un patrón de vibración caótico.
3.2.2. ACELERÓMETRO Y MAGNETÓMETRO
El acelerómetro del tipo compresión como fue el primer tipo a ser
desarrollado. Por lo general se prefiere el acelerómetro de cizallamiento,
configurado como se observa en la Figura 7, de tal manera que el elemento
activo este sujeto a fuerzas de cizallamiento.
Figura 7. Acelerómetro
Fuente: (FANCHI, 2006)
38
También hay otros tipos de diseños para acelerómetros. Se puede
considerar al acelerómetro piezo-eléctrico como el transductor estándar para
la medición de vibración en máquinas. Se produce en varias
configuraciones, pero la imagen mostrada sirve para la compresión del
principio de la operación de este dispositivo. La masa sísmica está sujetada
a la base con un perno axial, que se apoya en un resorte circular. El
elemento piezo-eléctrico está ajustado entre la base y la masa. Cuando una
masa está sujeta a una fuerza, se genera una carga eléctrica entre sus
superficies. Hay muchas materias de este tipo. El cuarzo es el que más se
utiliza. También hay materiales piezo- eléctricos sintéticos que funcionan
bien y en algunos casos son capaces de funcionar a temperaturas más altas
de lo que el cuarzo lo puede hacer. Si se incrementa la temperatura de un
material piezo-eléctrico, se va llegar al llamado "punto Curie" o " temperatura
Curie" donde se perderá la propiedad piezo-eléctrica. Una vez que esto
pasa, el transductor está defectuoso y no se puede reparar.
Cuando se mueve el acelerómetro hacia arriba y hacia abajo, la fuerza que
se requiere para mover la masa sísmica esta soportada por el elemento
activo. Según la segunda ley de Newton, esa fuerza es proporcional a la
aceleración de la masa. La fuerza sobre el cristal produce la señal de salida,
que por consecuente es proporcional a la aceleración del transductor. Los
acelerómetros son lineales en el sentido de la amplitud, lo que quiere decir
que tienen un rango dinámico muy largo. Los niveles más bajos de
aceleración que puede detectar son determinados únicamente por el ruido
electrónico del sistema, y el límite de los niveles más altos es la destrucción
del elemento piezo-eléctrico. Este rango de niveles de aceleración puede
abarcar un rango de amplitudes de alrededor de 160 dB (Desibeles) y
ningún otro transductor puede igualar esto.

39
El acelerómetro piezo-eléctrico es muy estable en periodos largos.
Mantendrá su calibración si no se le maltrata. Las dos maneras de que se
puede dañar un acelerómetro son la exposición a un calor excesivo y la
caída en una superficie dura. Si se cae de una altura de más de un par de
pies, en un piso de concreto, o en una cubierta de acero, se debe volver a
calibrar el acelerómetro para asegurarse que el cristal no se cuarteó. Una
pequeña cuarteadura causará una reducción en la sensibilidad y también
afectará de manera importante a la resonancia y a la respuesta de
frecuencia. Es una buena idea calibrar los acelerómetros una vez al año, si
están en servicio con colectores de datos portátiles.
El rango de frecuencias del acelerómetro es muy ancho y se extiende desde
frecuencias muy bajas en algunas unidades hasta varias decenas de
kilohertzios. La respuesta de alta frecuencia está limitada por la resonancia
de la masa sísmica, junto con la elasticidad del piezo-elemento. Esa
resonancia produce un pico importante en la respuesta de la frecuencia
natural del transductor, y eso se sitúa normalmente alrededor de 30 kHz
para los acelerómetros que se usan normalmente. Una regla general es que
un acelerómetro se puede usar alrededor de 1/3 de su frecuencia natural.
La mayoría de los acelerómetros que hoy en día se usan en la industria son
del tipo "PCI", lo que quiere decir que tienen un preamplificador interno de
circuito integrado. Este preamplificador recibe su energía de la polarización
de la corriente directa por el alambre de la misma señal, así que no se
necesita alambrado suplementario. El conductor debe tener su fuerza de
corriente directa disponible para este tipo de transductor. El acelerómetro
PCI tendrá un límite de baja frecuencia, debido al mismo amplificador y este
se sitúa generalmente a 1 Hz para la mayoría de las unidades disponibles
comercialmente. Algunas unidades fueron diseñadas especialmente para ir
hasta 0, 1 Hz si se necesita datos de muy baja frecuencia.
40
Cuando se conecta un acelerómetro PCI a la fuente de energía, el
amplificador necesita unos segundos para estabilizarse. Durante este tiempo
cualquier dato que la unidad recogerá será contaminado por las lentas
variaciones del voltaje. Por esa razón, los recopiladores de datos deben de
tener un retraso integrado, para asegurar que la unidad está en condición
estable. Si el retraso es demasiado breve, la forma de onda de tiempo
tendrá una rampa de voltaje en forma exponencial superpuesta sobre los
datos y en el espectro se verá una característica creciente de muy baja
frecuencia. Esto se debe evitar, ya que compromete el rango dinámico de la
medición.
Cuando se coloca un acelerómetro es importante que la ruta de vibración
desde la fuente hacia el acelerómetro sea la más corta posible,
especialmente si se está midiendo la vibración en rodamientos con
elementos rodantes.
Los magnetómetros se pueden dividir en dos tipos básicos:
• Magnetómetros escalares.- mide la fuerza total del campo
magnético en el que se encuentran.
• Magnetómetros del vector.- tienen la capacidad para medir el
componente del campo magnético en una dirección particular.
El uso de tres magnetómetros ortogonales al vector permite medir la fuerza,
la inclinación y la declinación del campo magnético definido.
El magnetómetro mide la magnitud de las tres componentes del campo
magnético de la Tierra y sus valores son usados junto con los del
acelerómetro para obtener el azimut.

41
3.3. MEDICIÓN EN SUPERFICIE
Las mediciones en superficie son una parte importante en la detección de
las vibraciones que se pueden presentar en el aparejo de fondo de
perforación, son sistemas utilizados a partir de la limitante que algunas
veces existe en los datos adquiridos a través de una herramienta MWD, por
ende la utilización de equipo de medición en la superficie es necesario.
El principio de este tipo de sistemas se basa en sensores instalados por
encima de la flecha o sarta de perforación, estos sensores pueden medir
fuerzas axiales y dinámicas torsionales en la sarta de perforación, además
de medir el torque y el peso de la sarta. Los acelerómetros utilizados en la
superficie son para medir las cargas axiales y torsionales sobre la sarta. Una
medición de movimientos laterales debe ser detectada por los canales en los
sensores axiales ya que este tipo de movimiento es difícil que se propague
hasta la superficie.
Otros sensores también son utilizados en superficie, como magnetómetros
para medir la velocidad de rotación o transductores de presión para las
bombas, así como sensores de temperatura.
La adquisición de datos en este tipo de sistemas se obtienen comúnmente a
partir de las muestras tomadas por los sensores, su depuración puede ser a
partir de 2000 tomas por segundo de cada canal aproximadamente con
filtros con un ancho de banda cercanos a los 500 Hz. Adicionalmente se
introducen en filtros de ancho de banda que van de 0 a 150 Hz, de 0 a 50 Hz
y de 0 a 12.5 Hz, los filtros con menor ancho de banda son los utilizados
para el estudio del daño de las vibraciones. Esto permite seleccionar la

42
información necesaria que utiliza cada algoritmo para determinar la
severidad de los movimientos.
3.4. MEDICIÓN EN EL FONDO DEL AGUJERO
Las mediciones en el fondo del agujero son de vital importancia para la
detección de las vibraciones, ya que debido a que es ahí donde se
encuentra el punto de interés, además de ser el lugar donde se presentan
las vibraciones, está práctica se implementó a partir de que se sabía que
algunos movimientos dañinos para el aparejo de fondo no se propagan
hasta la superficie teniendo así grandes limitantes para su detección.
Aquí se muestran las diferentes formas para medir las vibraciones en el
pozo. A continuación podremos observar la metodología y parámetros que
se utilizan para la medición de los fenómenos de las vibraciones más
dañinas.
3.4.1. MEDICIÓN DE VIBRACIÓN TORSIONAL (STICK-SLIP)
Para la medición de este fenómeno de vibración en el fondo del pozo se
utilizan herramientas especiales, estas herramientas pueden contener
acelerómetros y magnetómetros, en este caso se puede utilizar un
magnetómetro de salida el cual tomara valores en periodos de medición de
200muestras/sec. Cada 10 muestras el valor se guardara en la memoria de
la herramienta, posteriormente se crearán 20muestras/sec. Esto en un
periodo de tiempo de medición aproximado de 7.5 sec. De ahí se crean
150muestras/7.5sec y la toma número 5 será usada para el cálculo de la
obtención de 30 muestras suavizadas. Las cuales podrán ser procesadas de
tal forma que se puedan obtener datos representativos del fenómeno
vibratorio.

43
Lo siguiente es determinado por las 30 muestras representativas.
• SSRPMNM (Stick-Slip, mínimo)
• SSRPMXM (Stick-Slip, máximo)
• SSRPMAM (Stick-Slip, promedio)
Para determinar la severidad del Stick-Slip, se necesita calcular S1, donde
S1 es la medición de la separación de dos curvas representadas por la
cantidad máxima de RPM y la cantidad mínima de RPM.
Ec. [11]
Cabe mencionar que esta metodología es una de muchas que existen para
medir este fenómeno.
Otra metodología mide las variaciones de las Revoluciones por Minuto en el
fondo del Pozo. El Stick-Slip son los picos que se presentan a causa de la
fluctuación de las RPM sobre un intervalo de tiempo. La frecuencia que se
presenta es de 72Hz, en un promedio de 0.5seg. A partir de esto se calcula
el rango con las variaciones de las RPM en el fondo del pozo y en la
superficie.
La severidad de las vibraciones se determina con el rango anterior, entre
mayor sea el rango la severidad será mayor el fenómeno vibratorio.
Otra forma de medición es con la utilización del sistema RSS (Rotary
Steerable System) el cual se encuentra muy cerca de la broca, a través de
la siguiente ecuación que mide la eficiencia torsional:

44
(
) Ec. [12]
Cuando la ecuación resulta en un 100% no existe variación en las RPM y
cuando el porcentaje es 0% existe el fenómeno Stick-Slip, los rangos
intermedios hacen referencia a los niveles de vibración.
La relación entre la variación de las RPM y 2*PROM RPM determina la
eficiencia torsional. También se utiliza un porcentaje de la fluctuación de las
RPM y un sensor dinámico a base de acelerómetros en la sarta de
perforación el cual ayudan a determinar los choques en la sarta
3.4.2. MEDICIÓN DE LA VIBRACIÓN LATERAL WHIRL (GIRO)
En este fenómeno vibratorio se pueden utilizar sensores anteriormente
mencionados que midan las vibraciones axiales y laterales, las cuales son
cuantificadas a través de la Raíz Cuadrada que es una técnica estadística
para procesar señales con contenido dinámico.
La RMS (Root Mean Square) se representa como la energía que contiene
las vibraciones. El valor obtenido a través del método RMS es la medición
de amplitud más importante, ya que toma valores de tiempo de las ondas y
da un valor de amplitud que se relaciona directamente con la energía
contenida y por lo tanto da un valor de la capacidad de destrucción de la
vibración.
√
∑
Ec. [13]
Dónde:

45
= Energía contenida en las vibraciones
= Amplitud de las vibraciones
3.4.2.1. Ventajas de la RMS
Se considera utilizar este método ya que las mediciones procesadas con el
RMS tienen ventajas sobre las mediciones de picos y esto es aplicable para
el daño en las herramientas.
Las señales procesadas por el método RMS son capaces de mostrar la
energía detectada por la herramienta y así en cualquier segundo de la toma
de datos el valor resultante por el método RMS es más preciso.
Las herramientas MWD también fallan debido a un impacto aislado de alto
nivel (Excesiva energía a una baja frecuencia). La energía que se deriva
debido al impacto también es contenida en los datos.
Las herramientas de MWD también pueden fallar debido a las continuas
exposiciones a altos niveles de vibración o impacto.
3.4.3. MEDICIÓN DEL SALTO DE LA BARRENA. (BIT BOUNCING)
La detección del salto de la broca en el fondo del pozo es algo ambiguo, ya
que con una medición del WOB (Peso sobra la Broca) donde se presente un
valor de 0 podría ser suficiente para decir que estamos en presencia de este
fenómeno. Sin embargo el promedio de las cargas axiales en el agujero
pueden causar cambios tanto en la temperatura como en la hidráulica del
pozo, por ende se necesita un análisis mayor. Para predecir el salto de la
barrena, podría ser beneficiosa la utilización de algoritmos alternativos
basados en la dinámica de las cargas axiales.
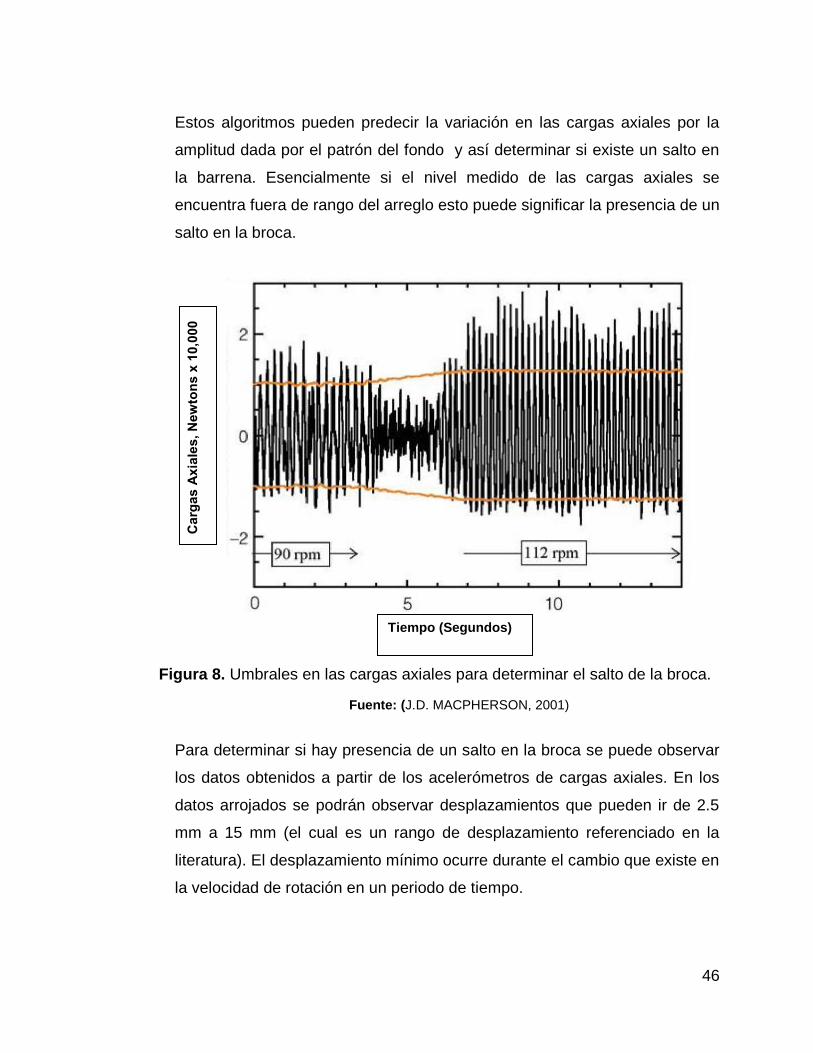
46
Estos algoritmos pueden predecir la variación en las cargas axiales por la
amplitud dada por el patrón del fondo y así determinar si existe un salto en
la barrena. Esencialmente si el nivel medido de las cargas axiales se
encuentra fuera de rango del arreglo esto puede significar la presencia de un
salto en la broca.
Figura 8. Umbrales en las cargas axiales para determinar el salto de la broca.
Fuente: (J.D. MACPHERSON, 2001)
Para determinar si hay presencia de un salto en la broca se puede observar
los datos obtenidos a partir de los acelerómetros de cargas axiales. En los
datos arrojados se podrán observar desplazamientos que pueden ir de 2.5
mm a 15 mm (el cual es un rango de desplazamiento referenciado en la
literatura). El desplazamiento mínimo ocurre durante el cambio que existe en
la velocidad de rotación en un periodo de tiempo.
Tiempo (Segundos)

47
Un valor representativo puede ser seleccionado como la carga axial normal,
en este caso ese valor puede ser 5mm. En la figura 8 se muestra los
umbrales positivos y negativos de las cargas axiales para la presencia de un
salto de la barrena. Si los valores se van por debajo del umbral negativo o
por encima del positivo podemos estar en presencia de un salto en la
barrena, en la Figura 4.2 se indica que con este método el salto de la
barrena puede ocurrir en un intervalo de 90 a 120 rpm.
3.4.4. MEDICIÓN DE LA FLEXIÓN (BENDING)
Para detectar o medir este fenómeno de vibración en el aparejo de fondo de
perforación es necesario la utilización de una herramienta MWD, esta
herramienta es capaz de medir el momento de flexión en el aparejo de fondo
de perforación generado por gravedad, esfuerzos laterales, además de los
diferentes puntos de contacto que sufre el aparejo con las paredes del pozo,
lo cual facilitara la determinación de los puntos de contacto del aparejo con
el pozo.
El momento de flexión en la herramienta es medido a partir de la aplicación
de 2 medidores de tensión en lados opuestos en el fondo, y estos a su vez
conectados a un puente de medición de la herramienta. Los medidores de
tensión cambian de una manera pequeña su resistencia cuando se sujetan a
esfuerzos de deformación elástica, resultando en una pequeña señal de
salida que captura el puente de medición. Posteriormente la conversión de
la señal de análoga a digital se determina a partir de la utilización de un
factor de calibración específico en la herramienta para diferentes ciclos de
flexión.
Esta herramienta presenta dos puntos de medición perpendiculares para la
medición del momento de flexión cuando el aparejo de fondo se encuentra
48
en rotación. El momento de flexión total es determinado a través de una
suma de vectores de las lecturas individuales de los dos ejes Mx y My.
3.5. MEDICIONES GRABADAS Y MEDICIONES EN TIEMPO
REAL
La resolución de los datos provenientes de la telemetría son
significativamente más pobres que los datos almacenados en memoria para
su posterior análisis, aunque esto no refiere que uno sea mejor que otro, ya
que en la actualidad la importancia de la toma de datos en tiempo real se ha
convertido en una prioridad para la pronta toma de decisiones.
Cuando el equipo MWD (Measurement While Drilling) se corre en el aparejo
de fondo, es común la práctica de medir las aceleraciones en un grado
limitado. Más común es que en esta práctica las mediciones que se realizan
sean de los movimientos laterales y axiales o los choques en varios periodos
de tiempo. Adicionalmente, una forma alternativa de medir los choques y
aceleraciones torsionales es a través de magnetómetros usados
directamente para medir en el fondo del pozo las RPM (Revoluciones por
Minuto), y los acelerómetros son utilizados para medir movimientos
tangenciales y radiales.
Las vibraciones generalmente son identificadas en periodos de tiempo
pequeño lo cual hace que los datos arrojados paras las mediciones sean
bastos y útiles.
Los sensores para la vibración que son utilizados específicamente en el
fondo del pozo son colocados en una forma perpendicular y en un conjunto
de 3 acelerómetros como se observa en la figura 9. Un acelerómetro es
colocado en dirección del eje Z esto para medir los movimientos a lo largo
del aparejo de fondo de perforación, los otros 2 acelerómetros son
colocados en los dos ejes restantes y miden los movimientos laterales y

49
perpendiculares a los ejes X y Y. El conjunto de 3 acelerómetros mide una
cantidad de movimiento promedio y las graba. Los picos y choques también
son grabados y medidos por estas herramientas, los 2 acelerómetros
laterales también son capaces de medir cambios de velocidad en forma
radial y tangencial que son útiles para la determinación de aceleraciones
torsionales.
Figura 9. Posicionamiento de Acelerómetros.
Fuente: (DAVID C-K CHEN, 2003)
3.5.1. MEDICIÓN GRABADA (POST-JOB)
3.5.1.1. Principio de la herramienta
Es una herramienta no invasiva figura 10 y 11, maneja de manera
independiente la medición de las vibraciones y en los análisis para mejorar
los sistemas de perforación. La creación de esta herramienta fue a partir de
evitar las fallas prematuras en la barrena las cuales comprometen el
rendimiento de perforación y provoca una baja ROP (Rate of Penetration).

50
Los sensores de vibración en la herramienta de grabación se encuentran
lejos de la barrena debido al daño que se produce, aunque puede medir
datos muy cerca de la broca podría ser una mejor forma para detectar los
problemas, ya que al encontrarse a una distancia mínima del fondo puede
ser de una utilidad mayor que si encontrara a una gran distancia de la broca.
Figura 10. Herramienta Post - Corrida.
Fuente: Prieto, 2009
Figura 11. Herramienta Post - Corrida.
Fuente: (PRIETO, 2009)
51
La herramienta que se muestra en la Figura 4.4 contiene un módulo dinámico
que puede:
• Evaluar el diseño del aparejo de fondo y de la barrena.
• Mejorar los parámetros operativos.
• Contener puntos de referencia para laboratorio y campo.
Contiene un módulo de memoria para análisis post-corrida, además de contar
con acelerómetros, magnetómetros y sensores de temperatura. El tiempo de
operación de este tipo de herramientas puede ser de 200 horas
aproximadamente.
Está herramienta cuenta con un conjunto de acelerómetros, los cuales medirán
los 3 tipos de vibración que conocemos, además de medir la velocidad angular.
La herramienta es capaz de almacenar muestras de alta frecuencia de hasta 5
segundos en periodos regulares, llamados “ráfaga de datos”. También es capaz
de almacenar y calcular velocidades de rotación máximas y mínimas, además
de contar con la posibilidad de controlar la frecuencia de la “ráfaga de datos”.
Sus parámetros operativos pueden ser los siguientes: Puede operar a una
temperatura máxima de hasta 150°C, con una presión máxima de 20,000 psi, y
una medición de 20 G en RMS. Se puede activar automáticamente con la
presión y puede ser colocada en broca con diámetros variables.
En la figura 12 podemos observar las aceleraciones máximas laterales
tomadas por las herramientas de grabación. Vemos que la construcción de la
gráfica es la siguiente en el eje de las ordenadas se mide las G’s y en el eje de
la abscisas se mide el tiempo en horas. Se pueden ver los grandes picos que se
generan en el tiempo de medición, estos representan los rangos laterales, que

52
como se había comentado anteriormente se miden en G´s, sabemos que esto
es la cantidad de energía en un impacto que recibirá en este caso el aparejo de
fondo de Perforación y todos sus componentes.
Figura 12. Medición de máximos movimientos laterales en un Acelerómetro.
Fuente: (PÉREZ, 2007)
En la figura 13 se puede observar la severidad medida de Stick-Slip por la
herramienta de grabación, se puede observar que en el eje de las ordenadas se
mide la relación SS mientras que el eje de las abscisas se mide el tiempo. El
rango SS (Stick-Slip) es aquel que medirá la severidad del fenómeno vibratorio,
aquí podemos observar como este fenómeno se presenta de manera constante
a determinados tiempos, esta es una representación de lo que los
acelerómetros graban durante la operación, cabe mencionar que este tipo de
datos son analizados posteriormente a la operación y no en tiempo real, lo cual
es una limitante para este tipo de mediciones, ya que el control inmediato de las
mismas puede reducir y prevenir fallas prematuras en los componentes del
aparejo de fondo de Perforación.
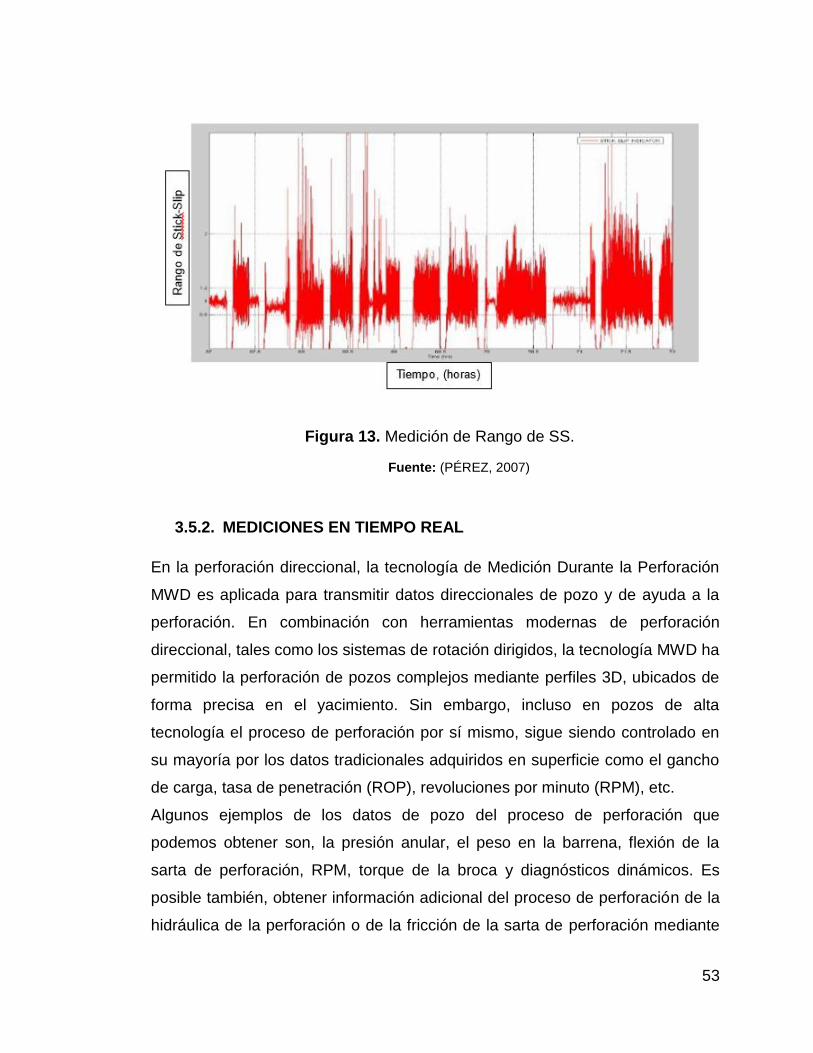
53
Figura 13. Medición de Rango de SS.
Fuente: (PÉREZ, 2007)
3.5.2. MEDICIONES EN TIEMPO REAL
En la perforación direccional, la tecnología de Medición Durante la Perforación
MWD es aplicada para transmitir datos direccionales de pozo y de ayuda a la
perforación. En combinación con herramientas modernas de perforación
direccional, tales como los sistemas de rotación dirigidos, la tecnología MWD ha
permitido la perforación de pozos complejos mediante perfiles 3D, ubicados de
forma precisa en el yacimiento. Sin embargo, incluso en pozos de alta
tecnología el proceso de perforación por sí mismo, sigue siendo controlado en
su mayoría por los datos tradicionales adquiridos en superficie como el gancho
de carga, tasa de penetración (ROP), revoluciones por minuto (RPM), etc.
Algunos ejemplos de los datos de pozo del proceso de perforación que
podemos obtener son, la presión anular, el peso en la barrena, flexión de la
sarta de perforación, RPM, torque de la broca y diagnósticos dinámicos. Es
posible también, obtener información adicional del proceso de perforación de la
hidráulica de la perforación o de la fricción de la sarta de perforación mediante

54
algoritmos de ingeniería de la perforación con los datos adquiridos en pozo y en
superficie.
3.5.3. TELEMETRÍA
El propósito de las señales de MWD es transmitir los datos medidos en el fondo
del pozo a la superficie para procesarlos. La telemetría es el proceso que
permite transmitir datos de un lugar a otro.
Se utiliza una variedad de tipos de señales para transmisión de datos, ondas
electromagnéticas, pulsos de presión del lodo; es decir pulsos negativos, pulsos
positivos y ondas continuas.
3.5.3.1. Ondas electromagnéticas Algunas herramientas de LWD utilizan este tipo de ondas para enviar su
información a la herramienta MWD, sobre todo cuando están demasiado lejos
sobre el aparejo de fondo de perforación para utilizar los suplementos en tiempo
real para la comunicación. Estas ondas no son lo bastante fuertes como para
distancias grandes tales como la transmisión a la superficie.
3.5.3.2. Pulsos negativos
Las herramientas de MWD no utilizan pulsos negativos para enviar datos a la
superficie. Estos pulsos son generados momentáneamente reduciendo la
presión en la columna de alimentación. Esto se completa cuando el fluido
dentro de la sarta se desvía al espacio anular con una válvula de descarga.
Abrir esta válvula reduce la presión en la columna de alimentación en 100 psi
aproximadamente, el cierre de la válvula vuelve la presión en la columna de
alimentación a su estado original.

55
3.5.3.3. Pulsos positivos
Las herramientas más antiguas utilizan este tipo de pulsos de presión para
transmitir los datos a superficie. Estos se generan en la columna del fluido por
bloqueo momentáneo y parcial del flujo del lodo a través de la sarta. Cuando se
bloquea el fluido, la presión dentro del aparejo aumenta y al desbloquearse
vuelve a su estado original.
3.5.3.4. Pulsos continuos Las nuevas herramientas ocupan este tipo de transmisión para enviar los datos
a la superficie. Son un tipo de pulso positivo. Son generadas en la columna de
fluido por un bloqueo y desbloqueo continuo del flujo de fluido a través del
aparejo. La presión del fluido aumenta dentro del aparejo y al desbloquearse
regresa a su estado original.
3.5.3.5. Mediciones en el fondo del pozo Durante la perforación utilizamos las herramientas MWD y LWD para hacer
mediciones en tiempo real del fondo del pozo, estas mediciones son una parte
importante, ya que permite la evaluación de la formación, colocación del pozo y
su dirección.
3.5.3.6. Conversión de datos El procesamiento de datos adquiridos a través de la herramienta MWD permite
que la evaluación continúe. En este caso se tratara el procesamiento de datos
con el sistema DSP (Digital Signal Processor), este sistema procesa líneas de
datos a lo largo de un segmento de 5 segundos mientras que el siguiente
segmento de datos adquiridos es almacenado. Entre cada segmento de 5

56
segundos en una fila de cerca de 60,000 datos (con 12 canales x 1,000 Hz x 5
segundos) la información se convierte en información de diagnóstico estática.
La información estática se entiende a partir de los valores promedio de los
sensores en cada canal, las RPM promedio en el fondo del pozo, el momento
estático de cada RMS para cada uno de los canales y el valor máximo y mínimo
de cada canal elegido. A partir de esto se definen valores de severidad del
fenómeno que se presenta.
El proceso inicia con un filtro digital con un ancho de banda de 70 Hz. Los datos
son filtrados y eliminados a través de diferentes niveles para seleccionarlos
para introducirlos a los algoritmos requeridos. Las señales del magnetómetro
son procesadas y determinan la velocidad de rotación instantánea promedio. Un
algoritmo parecido es utilizado para los canales que detectan la flexión. La
combinación de estos datos provee la entrada para el diagnóstico del giro. Los
componentes de la herramienta que manejan altas frecuencias son los
encargados de determinar la eficiencia de corte de la broca.
3.6. INTERPRETACIÓN
3.6.1. TORSIONAL (STICK-SLIP)
En la tabla 1 de la Compañía Baker Hughes, se pueden observar los diferentes
niveles de severidad que se pueden presentar de Stick-Slip, esta compañía
utiliza 8 niveles de severidad que van de 0 a 7 que se pueden visualizar en la
primera columna, en la segunda se puede ver los valores calculados de S1,
estos varían de 0 a 1.2, en los niveles de severidad que van del 0 al 5 no existe
un límite de tiempo para su tolerancia, en el nivel 6 el tiempo máximo permisivo
debe ser de 5 horas y para el nivel 7 el tiempo máximo debe ser de 1 hora, si no
la herramienta según sus especificaciones puede fallar.
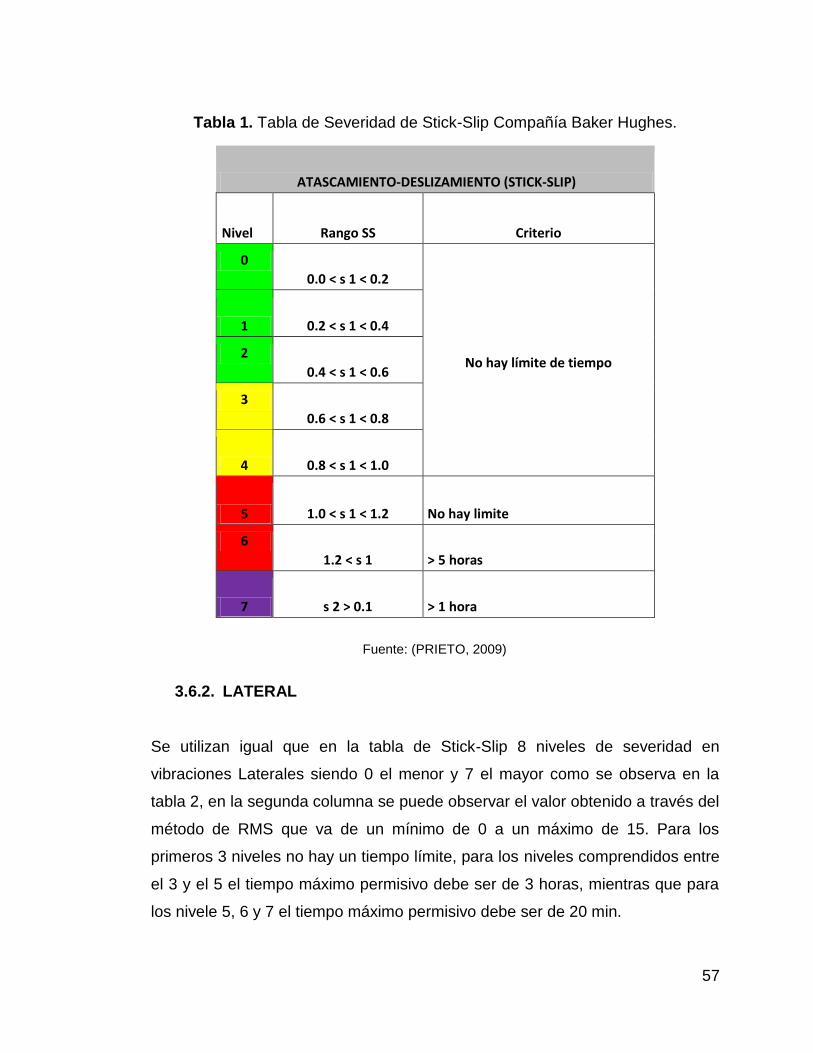
57
Tabla 1. Tabla de Severidad de Stick-Slip Compañía Baker Hughes.
ATASCAMIENTO-DESLIZAMIENTO (STICK-SLIP)
Nivel Rango SS Criterio
0 0.0 < s 1 < 0.2
No hay límite de tiempo
1 0.2 < s 1 < 0.4
2 0.4 < s 1 < 0.6
3 0.6 < s 1 < 0.8
4 0.8 < s 1 < 1.0
5 1.0 < s 1 < 1.2 No hay limite
6 1.2 < s 1 > 5 horas
7 s 2 > 0.1 > 1 hora
Fuente: (PRIETO, 2009)
3.6.2. LATERAL
Se utilizan igual que en la tabla de Stick-Slip 8 niveles de severidad en
vibraciones Laterales siendo 0 el menor y 7 el mayor como se observa en la
tabla 2, en la segunda columna se puede observar el valor obtenido a través del
método de RMS que va de un mínimo de 0 a un máximo de 15. Para los
primeros 3 niveles no hay un tiempo límite, para los niveles comprendidos entre
el 3 y el 5 el tiempo máximo permisivo debe ser de 3 horas, mientras que para
los nivele 5, 6 y 7 el tiempo máximo permisivo debe ser de 20 min.

58
Recordando que este tipo de vibración es la más dañina que existe
.
Tabla 2. Tabla de Severidad de Vibraciones Laterales Compañía Baker
LATERAL
Nivel g de RMS Criterio
0 0.0 < x < 0.5
No hay límite de tiempo
1 0.5 < x < 1.0
2 1.0 < x < 2.0
3 2.0 < x < 3.0
4 3.0 < x < 5.0 > 3 Horas
5 5.0 < x < 8.0 > 20 minutos
6 8.0 < x < 15.0 > 20 minutos
7 15.0 < x > 20 minutos
Fuente: (PRIETO, 2009)
3.6.3. AXIAL En esta tabla 3 se puede observar el mismo estándar utilizado para las
mediciones laterales, por lo que la variación en su interpretación no existe para
fines de la determinación de la severidad en la sarta de perforación y el aparejo
de fondo.

59
Tabla 3. Tabla de Severidades de Vibraciones Axiales Compañía Baker
Hughes.
Axial
g de RMS Criterio
0 0.0 < x < 0.5
No hay límite de
tiempo 1 0.5 < x < 1.0 2 1.0 < x < 2.0
3 2.0 < x < 3.0
4 3.0 < x < 5.0 > 3 Horas 5 5.0 < x < 8.0 > 20 minutos
6 8.0 < x <
15.0 > 20 minutos
7 15.0 < x > 20 minutos
Fuente: (PRIETO, 2009)
3.7. CONTROL DE VIBRACIONES
3.7.1. AXIAL
Cuando el tipo de vibración axial se encuentra en niveles normales y aceptables
los cuales no causan daño al ensamblaje de fondo de perforación ni al equipo
electrónico; se le puede considerar con una severidad de nivel bajo lo cual no
requiere acción alguna para mitigarla.
Pero si está en niveles altos la siguiente figura nos puede ayudar a tomar una
decisión.
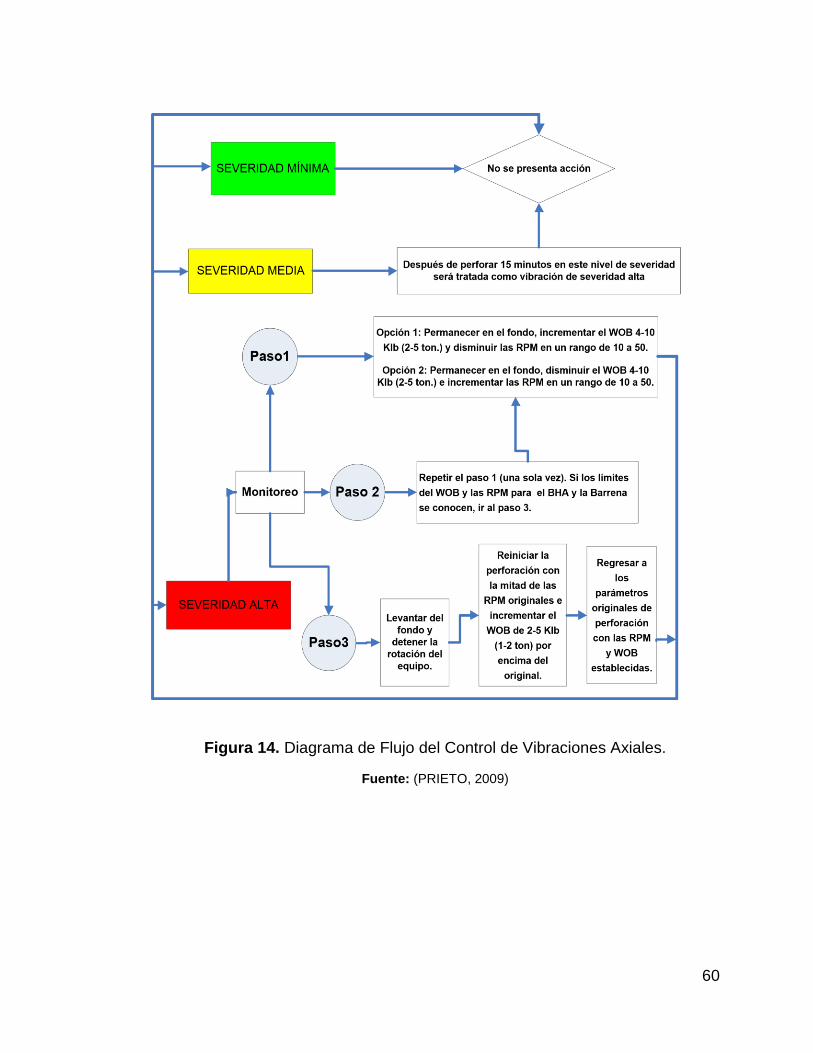
60
Figura 14. Diagrama de Flujo del Control de Vibraciones Axiales.
Fuente: (PRIETO, 2009)

61
3.7.2. LATERAL
Cuando este tipo de vibración se encuentra en niveles normales y aceptables
los cuales no causan daño al aparejo de fondo de perforación y al equipo
electrónico; se le puede considerar como una de nivel bajo lo cual no requiere
acción alguna para mitigarla.
Pero si está en niveles altos la siguiente figura nos puede ayudar a tomar una
decisión.

62
Figura 15. Diagrama de Flujo del Control de Vibraciones Laterales.
Fuente: (PRIETO, 2009)
SEVERIDAD MÍNIMA
SEVERIDAD MEDIA
SEVERIDAD ALTA
No se presenta acción
Después de perforar 15 minutos en este nivel de
severidad será tratada como vibración de
severidad alta
Se tiene que permanecer en el fondo y reducir las Revoluciones por Minuto ( RPM
) por intervalos de 10 - 50 , esta es la mejor opción especialmente cuando se perfora en pozos con altos ángulos , donde la presencia del giro ( Whirl
) es menos estable . Seguir monitoreando la actividad , hasta llegar a niveles bajos .
Levantar del fondo y detener la rotación . Reiniciar con RPM´s de entre 40 - 70
c icl / min . Regresar al fondo e
incrementar paulatinamente el peso sobre la barrena ( WOB )
hasta llegar al
intervalo de interés . Posteriormente incrementas las RPM
hasta maximizar
la ROP , este es el mejor paso para detener el giro ( Whirl )
en pozos con
bajos ángulos , donde la presencia del giro ( Whirl )
es más estable .
Paso 1
Paso 2
Monitoreo
63
3.7.3. TORSIONAL
Cuando el tipo de vibración de Stick-Slip se encuentra en niveles bajos no se
debe tomar acción en contra de este fenómeno, y aunque el nivel de
vibraciones sea un poco alto esto no significa que se deba de controlar por que
se ha demostrado que niveles moderados de vibración torsional son deseables
para optimizar el ROP en barrenas PDC mientras se perforan formaciones
duras, como la calcita y carbonatos duros.
En la siguiente figura nos muestra que se puede hacer para tomar una decisión
al momento de presentarse este tipo de vibración.

64
Figura 16. Diagrama de Flujo del Control de Vibraciones Torsionales
Fuente: (PRIETO, 2009)
SEVERIDAD MÍNIMA
SEVERIDAD MEDIA
SEVERIDAD ALTA
No se presenta acción
Después de perforar 15 minutos en este nivel de
severidad será tratada como vibración de
severidad alta
Incrementar las RPM en un rango de
10 a 50 y el WOB ( Peso sobre
la Barrena ) en un rango de
2 a 5
Klb ( 1 o
2 ton .).
Repetir el paso anterior a menos que se conozcan los límites de WOB y RPM para la barrena y el Aparejo de Fondo . Levantar del fondo y limpiar la sección del agujero y reiniciar la perforación con menos RPM y WOB .
Paso 1
Paso 2
Monitoreo
SEVERIDAD MUY ALTA
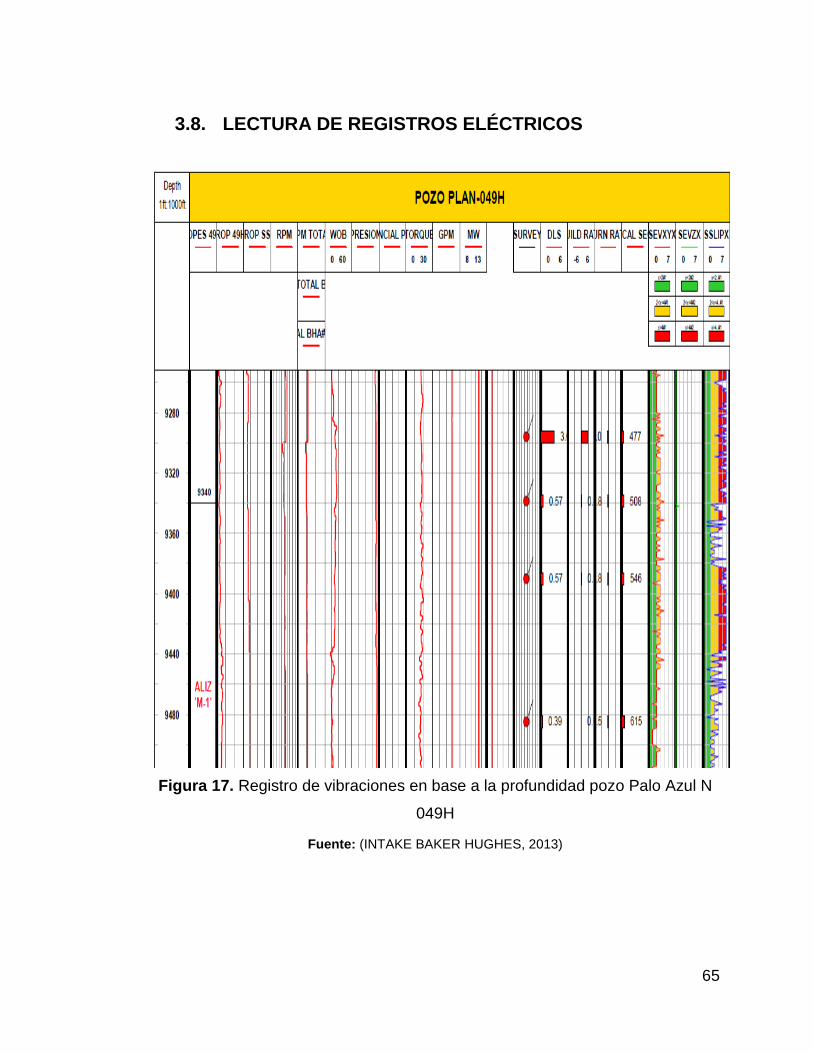
65
3.8. LECTURA DE REGISTROS ELÉCTRICOS
Figura 17. Registro de vibraciones en base a la profundidad pozo Palo Azul N
049H
Fuente: (INTAKE BAKER HUGHES, 2013)
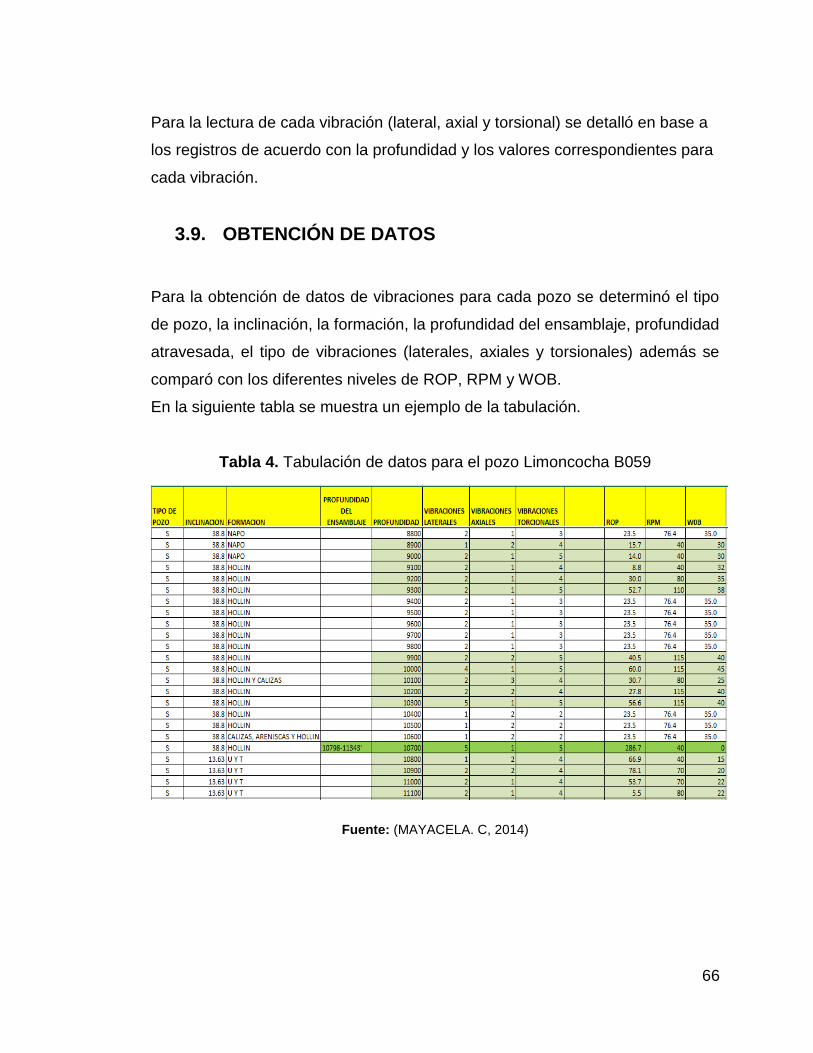
66
Para la lectura de cada vibración (lateral, axial y torsional) se detalló en base a
los registros de acuerdo con la profundidad y los valores correspondientes para
cada vibración.
3.9. OBTENCIÓN DE DATOS
Para la obtención de datos de vibraciones para cada pozo se determinó el tipo
de pozo, la inclinación, la formación, la profundidad del ensamblaje, profundidad
atravesada, el tipo de vibraciones (laterales, axiales y torsionales) además se
comparó con los diferentes niveles de ROP, RPM y WOB.
En la siguiente tabla se muestra un ejemplo de la tabulación.
Tabla 4. Tabulación de datos para el pozo Limoncocha B059
Fuente: (MAYACELA. C, 2014)
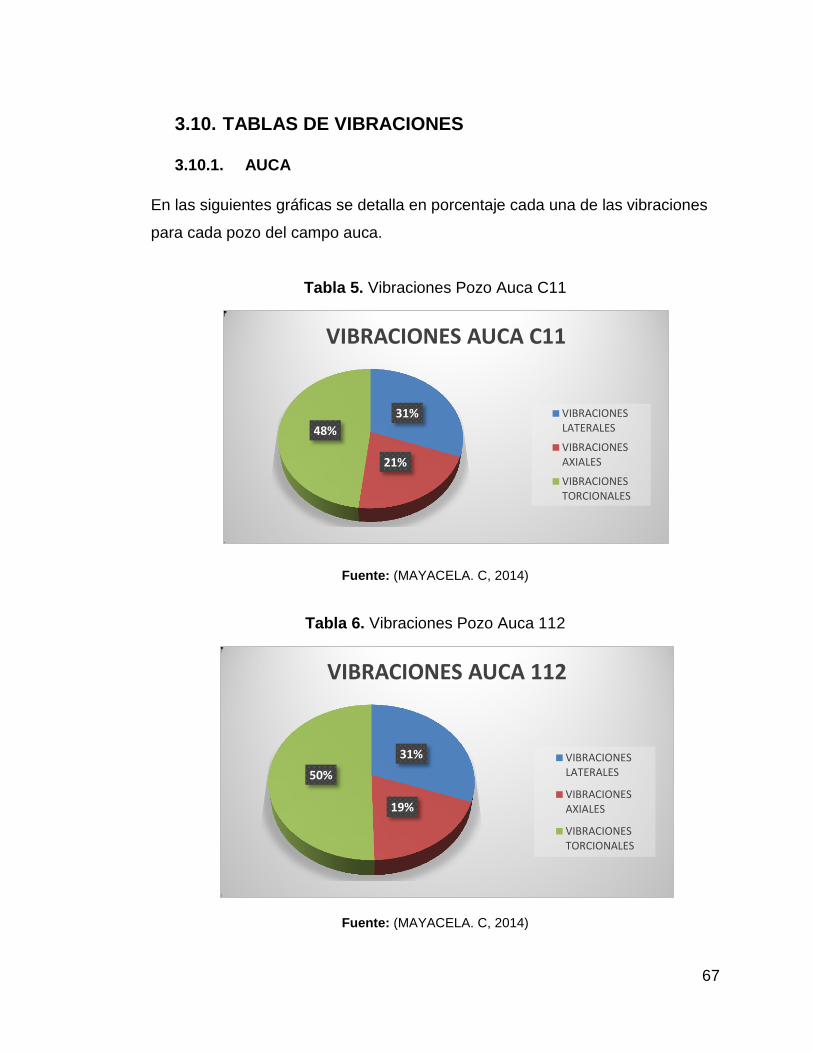
67
3.10. TABLAS DE VIBRACIONES
3.10.1. AUCA
En las siguientes gráficas se detalla en porcentaje cada una de las vibraciones
para cada pozo del campo auca.
Tabla 5. Vibraciones Pozo Auca C11
Fuente: (MAYACELA. C, 2014)
Tabla 6. Vibraciones Pozo Auca 112
Fuente: (MAYACELA. C, 2014)
31%
21%
48%
VIBRACIONES AUCA C11
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
31%
19%
50%
VIBRACIONES AUCA 112
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES

68
Tabla 7. Vibraciones Pozo Auca 127
Fuente: (MAYACELA. C, 2014)
Tabla 8. Vibraciones Pozo Auca J110
Fuente: (MAYACELA. C, 2014)
30%
22%
48%
VIBRACIONES AUCA C127
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
29%
21%
50%
VIBRACIONES AUCA J110
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES

69
Tabla 9. Vibraciones Pozo Auca J153
Fuente: (MAYACELA. C, 2014)
Tabla 10. Vibraciones Pozo Auca J154
Fuente: (MAYACELA. C, 2014)
28%
20%
52%
VIBRACIONES AUCA J153
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
28%
22%
50%
VIBRACIONES AUCA J154
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
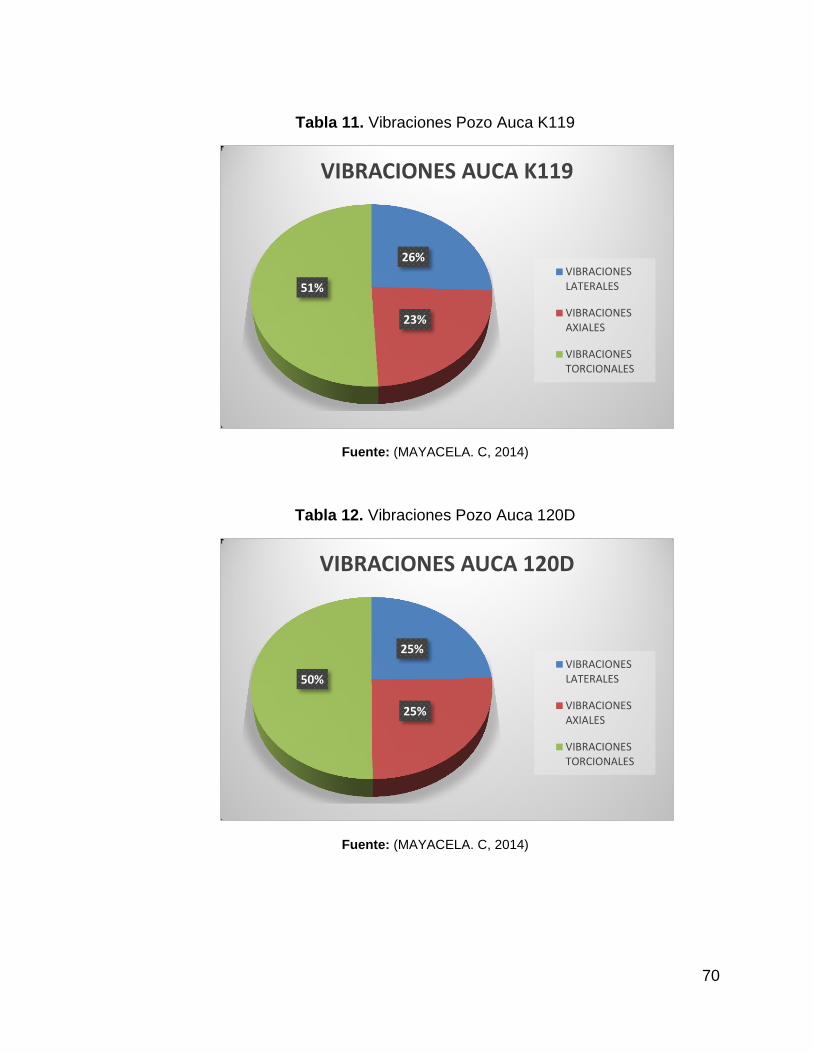
70
Tabla 11. Vibraciones Pozo Auca K119
Fuente: (MAYACELA. C, 2014)
Tabla 12. Vibraciones Pozo Auca 120D
Fuente: (MAYACELA. C, 2014)
26%
23%
51%
VIBRACIONES AUCA K119
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
25%
25%
50%
VIBRACIONES AUCA 120D
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
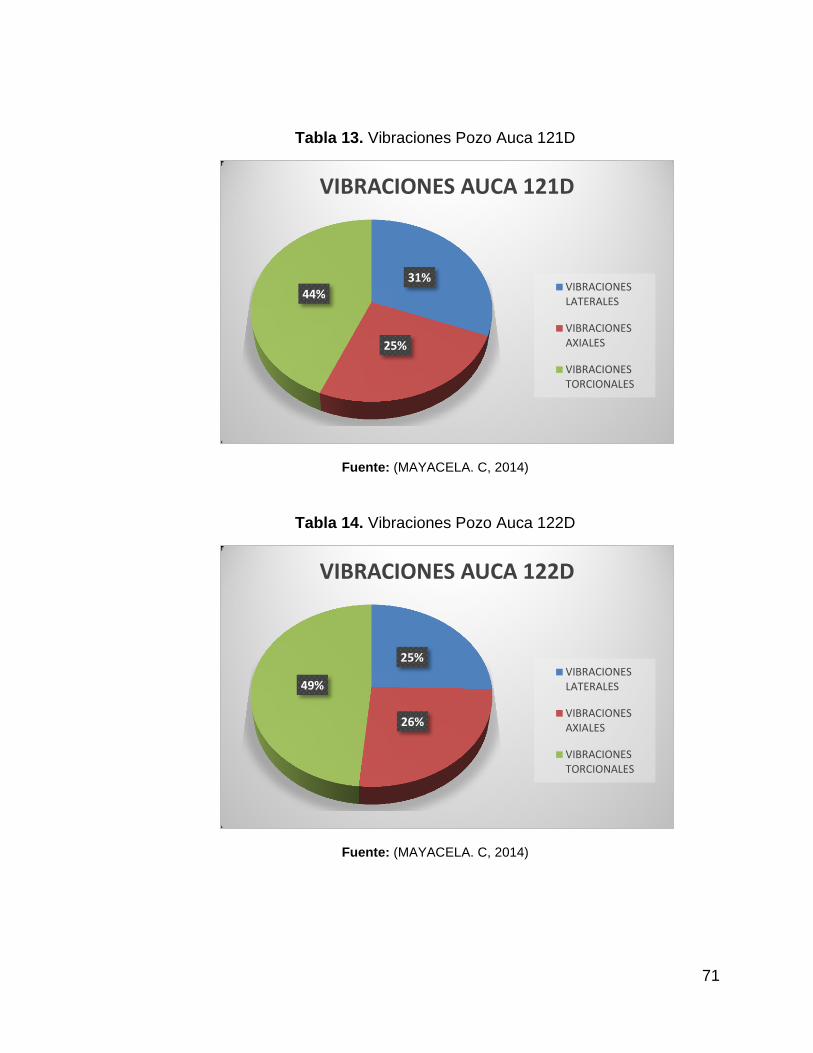
71
Tabla 13. Vibraciones Pozo Auca 121D
Fuente: (MAYACELA. C, 2014)
Tabla 14. Vibraciones Pozo Auca 122D
Fuente: (MAYACELA. C, 2014)
31%
25%
44%
VIBRACIONES AUCA 121D
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
25%
26%
49%
VIBRACIONES AUCA 122D
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
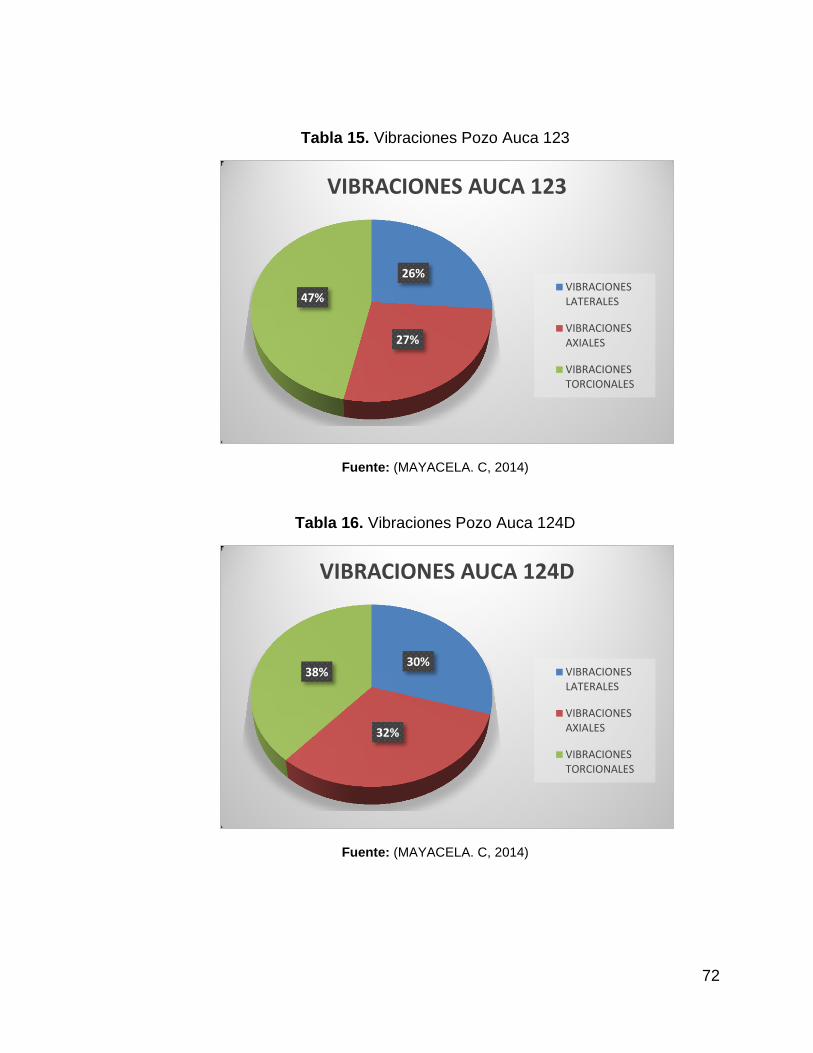
72
Tabla 15. Vibraciones Pozo Auca 123
Fuente: (MAYACELA. C, 2014)
Tabla 16. Vibraciones Pozo Auca 124D
Fuente: (MAYACELA. C, 2014)
26%
27%
47%
VIBRACIONES AUCA 123
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
30%
32%
38%
VIBRACIONES AUCA 124D
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES

73
Tabla 17. Vibraciones Pozo Auca 124D
Fuente: (MAYACELA. C, 2014)
3.10.2. LIMONCOCHA
En las siguientes gráficas se detalla en porcentaje cada una de las vibraciones
para cada pozo del campo Limoncocha.
Tabla 18. Vibraciones Pozo Limoncocha B57
Fuente: (MAYACELA. C, 2014)
27%
31%
42%
VIBRACIONES AUCA 125D
VIBRACIONESLATERALES
VIBRACIONESAXIALES
VIBRACIONESTORCIONALES
31%
19%
50%
Limoncocha B57
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES

74
Tabla 19. Vibraciones Pozo Limoncocha B059
Fuente: (MAYACELA. C, 2014)
Tabla 20. Vibraciones Pozo Limoncocha B42
Fuente: (MAYACELA. C, 2014)
32%
19%
49%
Limoncocha B059
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
28%
18%
54%
Limoncocha B42
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
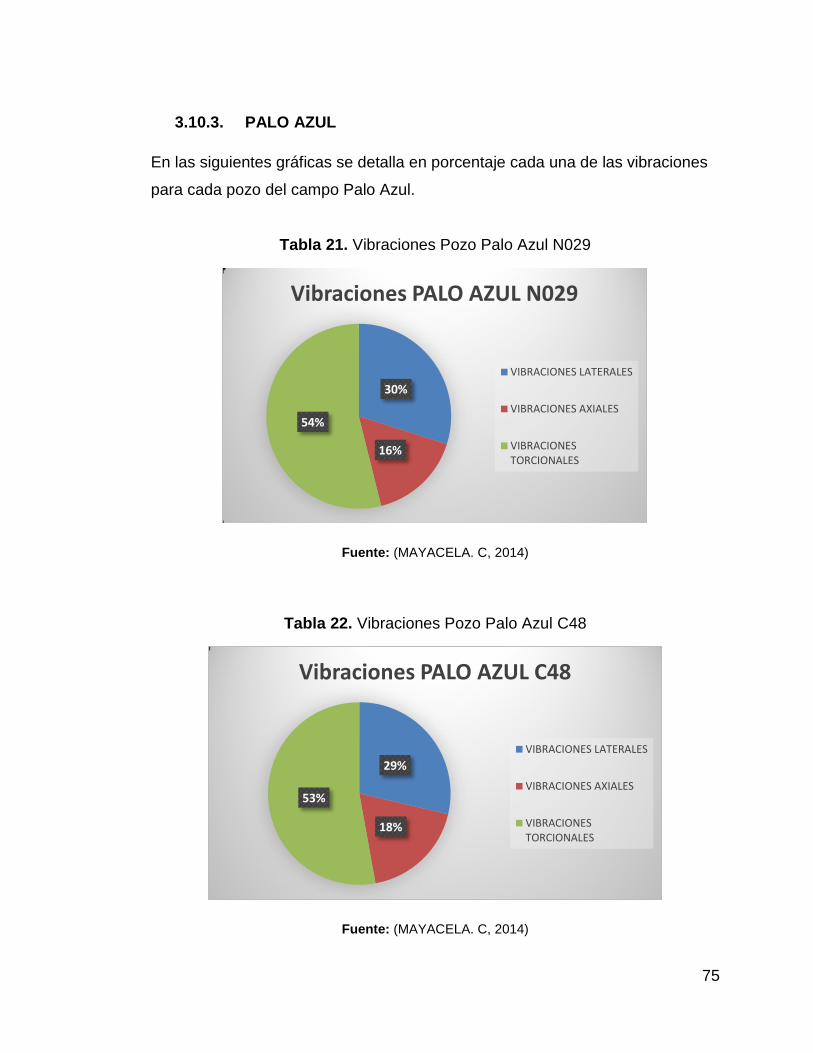
75
3.10.3. PALO AZUL
En las siguientes gráficas se detalla en porcentaje cada una de las vibraciones
para cada pozo del campo Palo Azul.
Tabla 21. Vibraciones Pozo Palo Azul N029
Fuente: (MAYACELA. C, 2014)
Tabla 22. Vibraciones Pozo Palo Azul C48
Fuente: (MAYACELA. C, 2014)
30%
16%
54%
Vibraciones PALO AZUL N029
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
29%
18%
53%
Vibraciones PALO AZUL C48
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
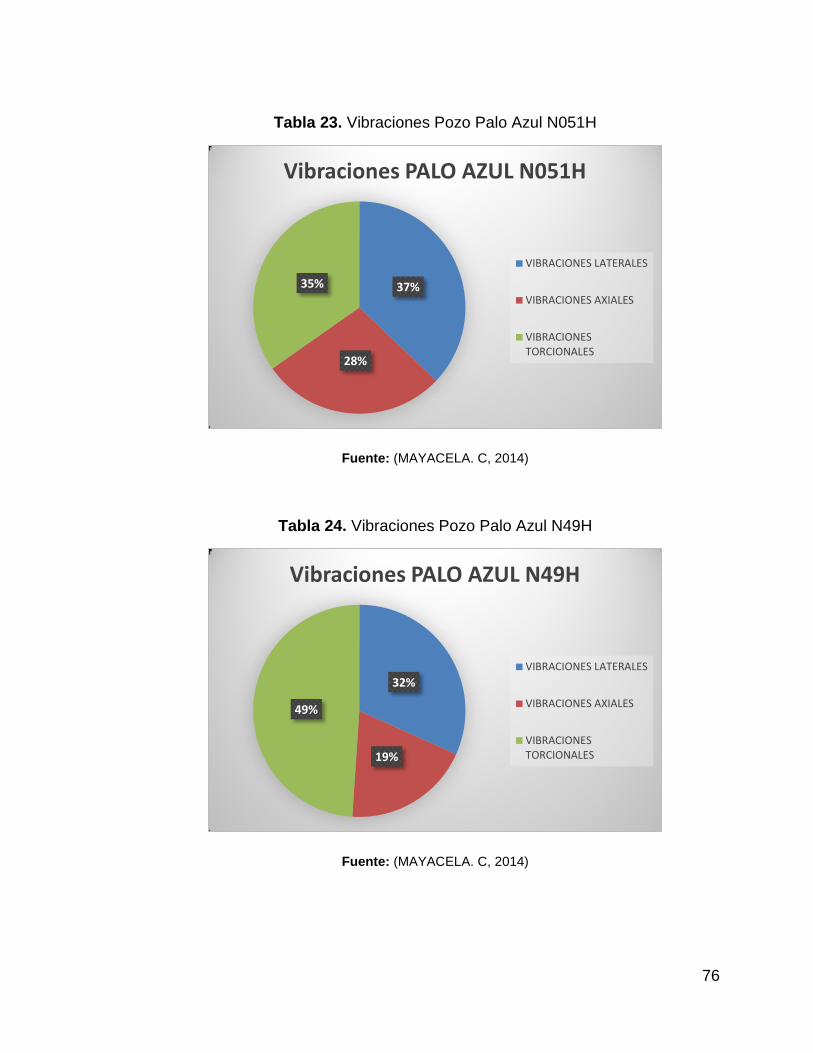
76
Tabla 23. Vibraciones Pozo Palo Azul N051H
Fuente: (MAYACELA. C, 2014)
Tabla 24. Vibraciones Pozo Palo Azul N49H
Fuente: (MAYACELA. C, 2014)
37%
28%
35%
Vibraciones PALO AZUL N051H
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
32%
19%
49%
Vibraciones PALO AZUL N49H
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES

77
Tabla 25. Vibraciones Pozo Palo Azul N050H
Fuente: (MAYACELA. C, 2014)
3.10.4. SACHA
En las siguientes gráficas se detalla en porcentaje cada una de las vibraciones
para cada pozo del campo Sacha.
Tabla 26. Vibraciones Pozo Sacha 220
Fuente: (MAYACELA. C, 2014)
29%
20%
51%
Vibraciones PALO AZUL N050H
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
32%
23%
45%
Vibraciones SACHA 220
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES

78
Tabla 27. Vibraciones Pozo Sacha 276
Fuente: (MAYACELA. C, 2014)
Tabla 28. Vibraciones Pozo Sacha 277
Fuente: (MAYACELA. C, 2014)
29%
21%
50%
Vibraciones SACHA 276
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
28%
19%
53%
Vibraciones SACHA 277
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES

79
Tabla 29. Vibraciones Pozo Sacha 278
Fuente: (MAYACELA. C, 2014)
Tabla 30. Vibraciones Pozo Sacha 286
Fuente: (MAYACELA. C, 2014)
29%
21%
50%
Vibraciones SACHA 278
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
28%
20%
52%
Vibraciones SACHA 286
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES

80
Tabla 31. Vibraciones Pozo Sacha 287
Fuente: (MAYACELA. C, 2014)
Tabla 32. Vibraciones Pozo Sacha 240
Fuente: (MAYACELA. C, 2014)
30%
22%
48%
Vibraciones SACHA 287
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
29%
20%
51%
Vibraciones SACHA 240
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
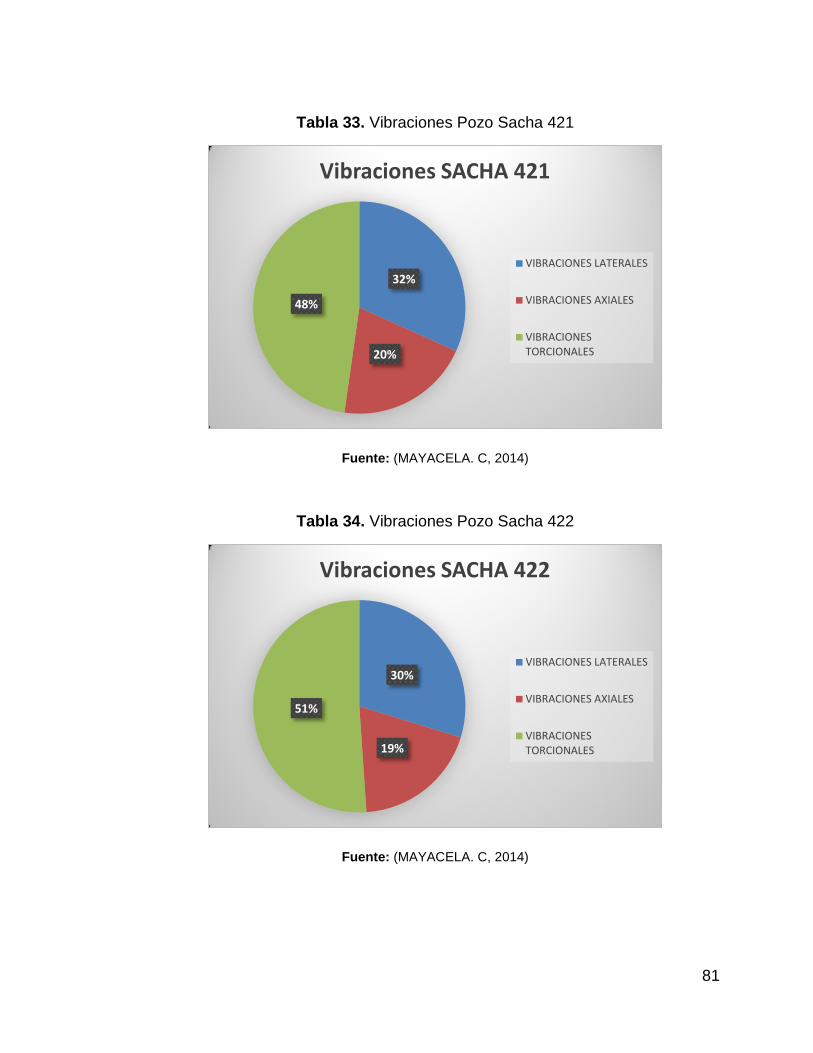
81
Tabla 33. Vibraciones Pozo Sacha 421
Fuente: (MAYACELA. C, 2014)
Tabla 34. Vibraciones Pozo Sacha 422
Fuente: (MAYACELA. C, 2014)
32%
20%
48%
Vibraciones SACHA 421
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES
30%
19%
51%
Vibraciones SACHA 422
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES

82
Tabla 35. Vibraciones Pozo Sacha 416
Fuente: (MAYACELA. C, 2014)
31%
17%
52%
Vibraciones SACHA 416
VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONESTORCIONALES

83
ANÁLISIS DE
RESULTADOS
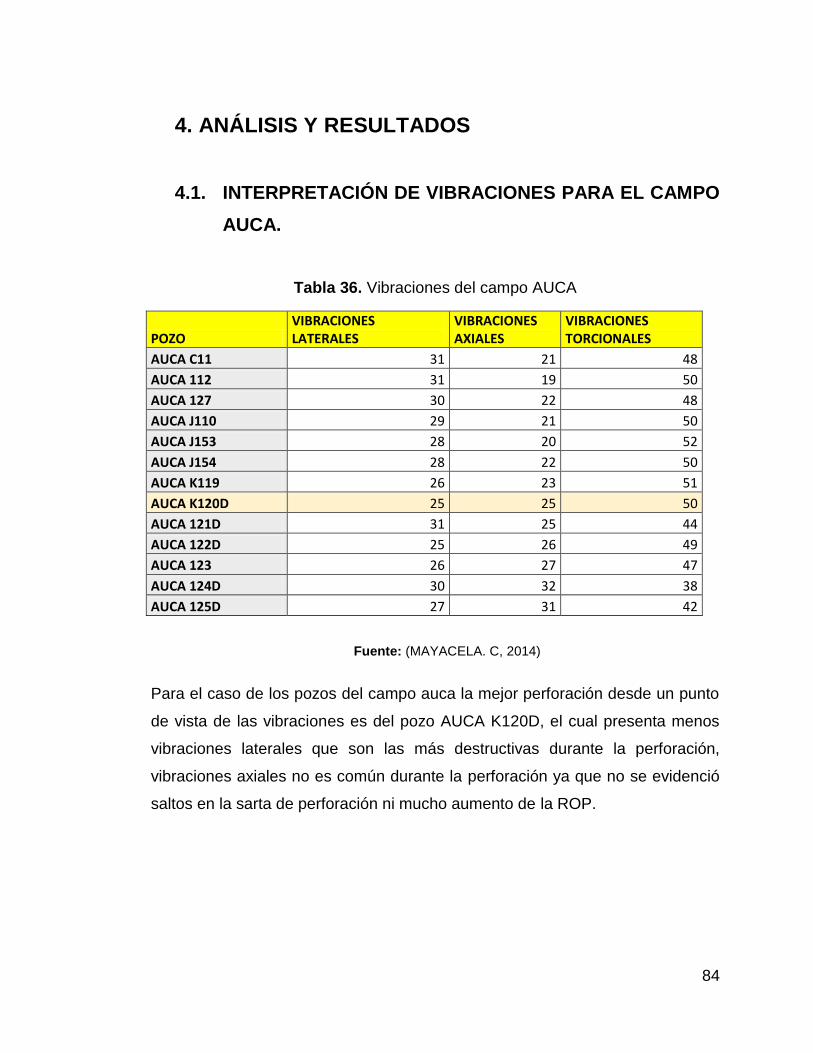
84
4. ANÁLISIS Y RESULTADOS
4.1. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO
AUCA.
Tabla 36. Vibraciones del campo AUCA
POZO VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONES TORCIONALES
AUCA C11 31 21 48
AUCA 112 31 19 50
AUCA 127 30 22 48
AUCA J110 29 21 50
AUCA J153 28 20 52
AUCA J154 28 22 50
AUCA K119 26 23 51
AUCA K120D 25 25 50
AUCA 121D 31 25 44
AUCA 122D 25 26 49
AUCA 123 26 27 47
AUCA 124D 30 32 38
AUCA 125D 27 31 42
Fuente: (MAYACELA. C, 2014)
Para el caso de los pozos del campo auca la mejor perforación desde un punto
de vista de las vibraciones es del pozo AUCA K120D, el cual presenta menos
vibraciones laterales que son las más destructivas durante la perforación,
vibraciones axiales no es común durante la perforación ya que no se evidenció
saltos en la sarta de perforación ni mucho aumento de la ROP.

85
4.1.1. PROPUESTA DE PERFORACIÓN PARA EL POZO AUCAK12
Es un pozo de desarrollo el cual lo llamaremos AUCA 12, con un
desplazamiento vertical de 2553 ft, y atravesará “Arenisca T Principal" como
objetivo Principal y los objetivos secundarios: Basal Tena, "U" Inferior, Hollín
Superior y Hollín Principal. El pozo está diseñado como un pozo tipo “J”, en el
cual el trabajo direccional inicia a 500 ft KOP, en donde comienza a construir a
razón de 1.2 deg/100 ft alcanzando una inclinación de 25.5 grados a los 2625 ft
MD, a partir de este punto se gira y construye a razón de 1.01 deg/100 ft hasta
alcanzar la inclinación máxima de 35 grados y el azimuth de 106.3 grados a los
5570 ft, desde acá se mantiene tangencial hasta los 10392 ft; pasando por la
sección de 12.24''.Luego de esto se empieza a tumbar la inclinación a razón de
1.2 deg/100 ft hasta el objetivo principal ''T'' inferior a los 11341 ft pasando por
el casing de 9 5/8 '' a 10913 ft, seguimos tumbando a razón de 1 deg/100 ft
hasta la profundidad final de 11759 ft MD en promedio para este campo.
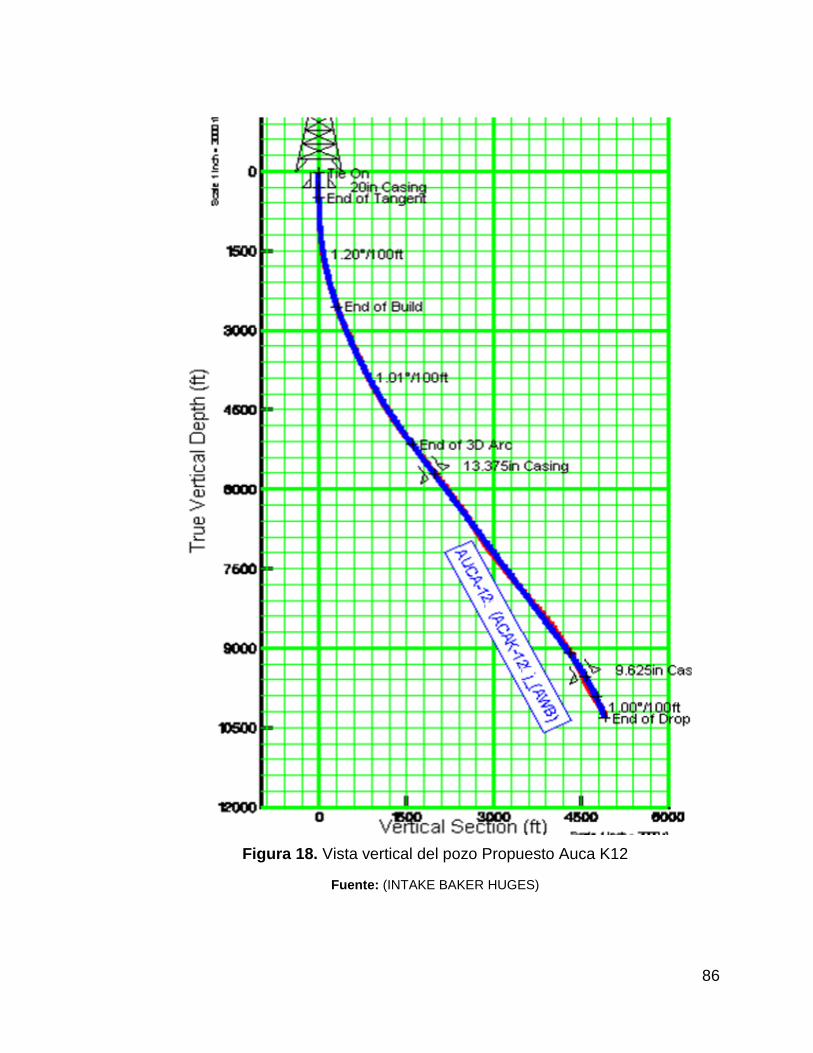
86
Figura 18. Vista vertical del pozo Propuesto Auca K12
Fuente: (INTAKE BAKER HUGES)

87
4.1.2. PROPUESTA PARA EL ENSAMBLAJE DE FONDO PARA CADA SECCIÓN DEL POZO AUCA K12
En base al estudio de vibraciones para el pozo propuesto del campo auca
los ensamblajes más recomendados son:
4.1.2.1. Sección BHA 16” del pozo Auca K12
Tabla 37. Ensamblaje propuesto para la sección 16” del pozo Auca k12
Fuente: (INTAKE, BAKER HUGHES, 2014)

88
4.1.2.2. Sección BHA 12.25” del pozo Auca k12
Tabla 38. Ensamblaje propuesto para la sección 12.25” del pozo Auca k12
Fuente: (INTAKE, BAKER HUGHES, 2014)

89
4.1.2.3. Sección BHA 8.5” del pozo Auca k12
Tabla 39. Ensamblaje propuesto para la sección 8.5” del pozo Auca k12
Fuente: (INTAKE, BAKER HUGHES, 2014)
4.2. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO
LIMONCOCHA.
Tabla 40. Vibraciones del campo LIMONCOCHA
POZO VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONES TORCIONALES
LIMONCOCHA B57 31 19 50
LIMONCOCHA B59 32 19 49
LIMONCOCHA B42 28 18 54
Fuente: (MAYACELA. C, 2014)

90
Para el caso de los pozos del campo limoncocha la mejor perforación desde
un punto de vista de las vibraciones es del pozo LIMONCOCHA B42, pozo
tipo “J”, el cual presenta menos vibraciones laterales que son las más
destructivas durante la perforación, vibraciones axiales no es común durante
la perforación ya que no se evidencio saltos en la sarta de perforación ni
mucho aumento de la ROP y vibraciones torcionales generalmente se
presentan al atravesar formaciones duras (conglomerados, calizas, arenas
abrasivas),
4.2.1. Propuesta de perforación para el pozo LIMONCOCHA H
Es un pozo direccional el cual lo llamaremos Limoncocha H, es un pozo de
desarrollo que producirá del reservorio U Inferior del campo LIMONCOCHA,
el mismo está planeado para alcanzar la arena "U" Inferior a 9463. TVD
(Objetivo Primario), en un hoyo de 8 ½.
La fase superficial de 16" se perforará verticalmente hasta ±500 ft (KOP),
donde se iniciará a perforar direccionalmente, construyendo ángulo con un
DLS de 1.6°/100 hasta alcanzar una inclinación de 10º y azimuth de 0º a
±1125. MD. Continuar tangencialmente hasta 1325. MD, donde se tumbará
ángulo con un DLS de 1.8°/100 hasta alcanzar la vertical a 1880. MD.
Perforar verticalmente hasta 2380. MD, donde se construirá con un DLS de
2.0°/100 hasta alcanzar una inclinación máxima de 42º y azimuth de 339º a
±4480. MD. Se continuará perforando tangencialmente hasta la profundidad
de asentamiento del revestimiento de 13 3/8. a ±6133. MD.
En la fase intermedia de 12 ¼”, se continuará perforando tangencialmente
hasta la profundidad de ±9425 ft MD, procediendo a construir y girar con
DLS de 3.05° hasta la profundidad de asentamiento del Caising de 9 5/8" a
±11545 ft MD con una inclinación de 56.77° y un azimuth de 263.21°. Las

91
formaciones que se atravesarán en esta sección son: Orteguaza, Tiyuyacu,
Tena y Napo.
En la fase de 8 ½”, se continuará realizando trabajo direccional en
inclinación y dirección con DLS de 2.89° hasta alcanzar una inclinación de
58.8° y un azimuth de 255.5° a 11779 ft MD (Tope de U Inferior). Luego se
continúa realizando trabajo direccional en inclinación y dirección con un DLS
de 1.8°/100 hasta alcanzar la profundidad total del pozo a 12444 ft MD/9864
ft TVD en promedio de este campo.

92
Figura 19. Vista vertical del pozo propuesto Limoncocha H
Fuente: (INTAKE BAKER HUGES, 2014)

93
4.2.2. Propuesta para el ensamblaje de fondo para cada sección para el
pozo Limoncocha H
En base al estudio de vibraciones para el campo LIMONCOCHA y para el pozo
propuesto los ensamblajes más recomendados son:
4.2.2.1. Sección BHA 16” del pozo Limoncocha H
Tabla 41. Ensamblaje propuesto para la sección 16” del pozo Limoncocha H
Fuente: (INTAKE, BAKER HUGHES, 2014)

94
4.2.2.2. Sección BHA 12.25” del pozo Limoncocha H
Tabla 42. Ensamblaje propuesto para la sección 12.25” del pozo Limoncocha H
Fuente: (INTAKE, BAKER HUGHES, 2014)
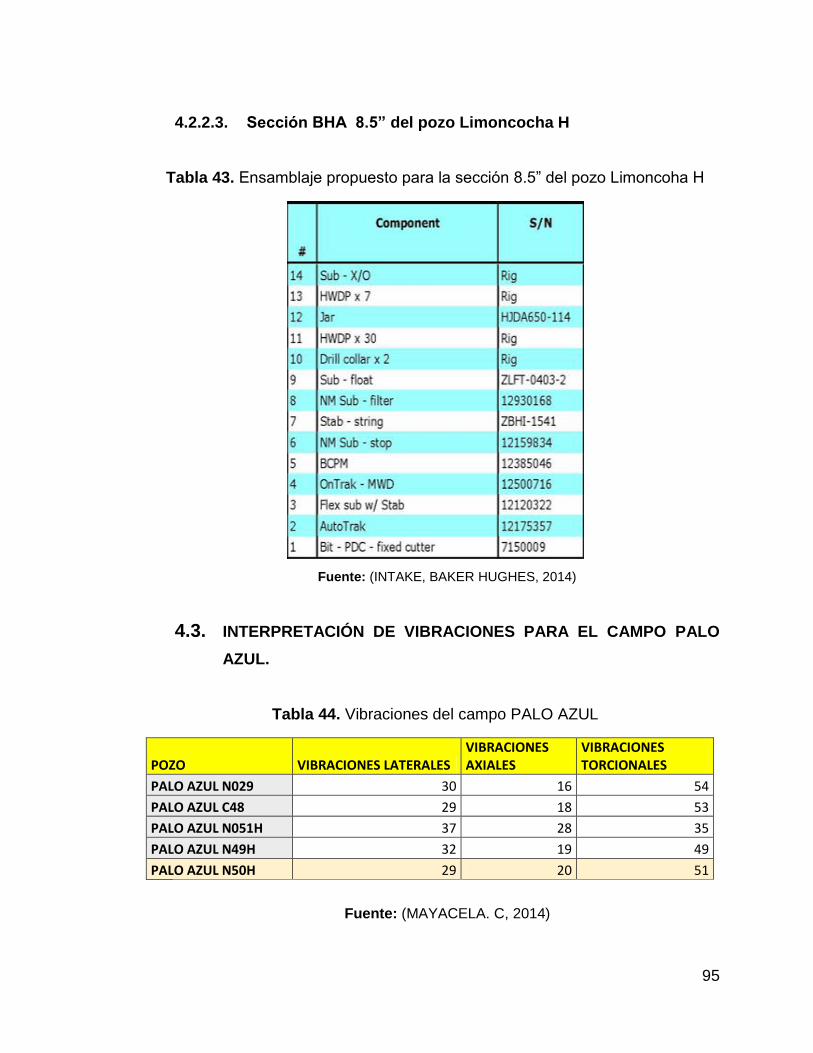
95
4.2.2.3. Sección BHA 8.5” del pozo Limoncocha H
Tabla 43. Ensamblaje propuesto para la sección 8.5” del pozo Limoncoha H
Fuente: (INTAKE, BAKER HUGHES, 2014)
4.3. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO PALO
AZUL.
Tabla 44. Vibraciones del campo PALO AZUL
POZO VIBRACIONES LATERALES VIBRACIONES AXIALES
VIBRACIONES TORCIONALES
PALO AZUL N029 30 16 54
PALO AZUL C48 29 18 53
PALO AZUL N051H 37 28 35
PALO AZUL N49H 32 19 49
PALO AZUL N50H 29 20 51
Fuente: (MAYACELA. C, 2014)

96
Para el caso de los pozos del campo palo azul la mejor perforación desde un
punto de vista de las vibraciones es del pozo PALO AZUL N50H , el cual
presenta menos vibraciones laterales que son las más destructivas durante la
perforación, vibraciones axiales no es común durante la perforación ya que no
se evidencio saltos en la sarta de perforación ni mucho aumento de la ROP y
vibraciones torcionales generalmente se presentan al atravesar formaciones
duras (conglomerados, calizas, arenas abrasivas),
4.3.1. PROPUESTA DE PERFORACIÓN PARA EL POZO PALO AZUL N0
El pozo a perforar como propuesta es el pozo Palo Azul N0, es un pozo de tipo
horizontal, que inicia a construir a razón de 1.1°/100', alcanzando a 1500 ft una
inclinación de 11° y azimuth de 210°. Se continuara perforando construyendo
ángulo y girando a razón de 1.0°/100ft, hasta que se tengan 28° de inclinación y
una dirección de 235°, esto a la profundidad de 3357 ft. A partir de dicha
profundidad inicia la zona tangencial hasta 4357 ft, para iniciar el tumbado de
ángulo, esto se hará a razón de 1.56°/100ft hasta conseguir 0° de inclinación
en el pozo, esto a la profundidad de 6154 ft, manteniendo la verticalidad hasta
la profundidad de 7854ft, donde se inicia el segundo KOP a razón de
2.55°/100ft, alcanzando una inclinación de 40° a 9423 ft. con una dirección de
17.567°. Se perfora una pequeña tangente de 300 ft, para continuar
construyendo hasta 10632ft a razón de 2.50°/100ft, profundidad a la que se
tendrán 62.729°. Desde esta profundidad se sigue incrementando el ángulo a
razón de 2.38°/100ft hasta conseguir 75.44° a 11165ft (Tope de Hollín). Se
continua levantando ángulo a razón de 2.97°/100ft y aterrizar el pozo con
85.48° a la profundidad de 11504 ft. Se alcanzara el punto de entrada de
navegación con 90° @ 10040 ft.
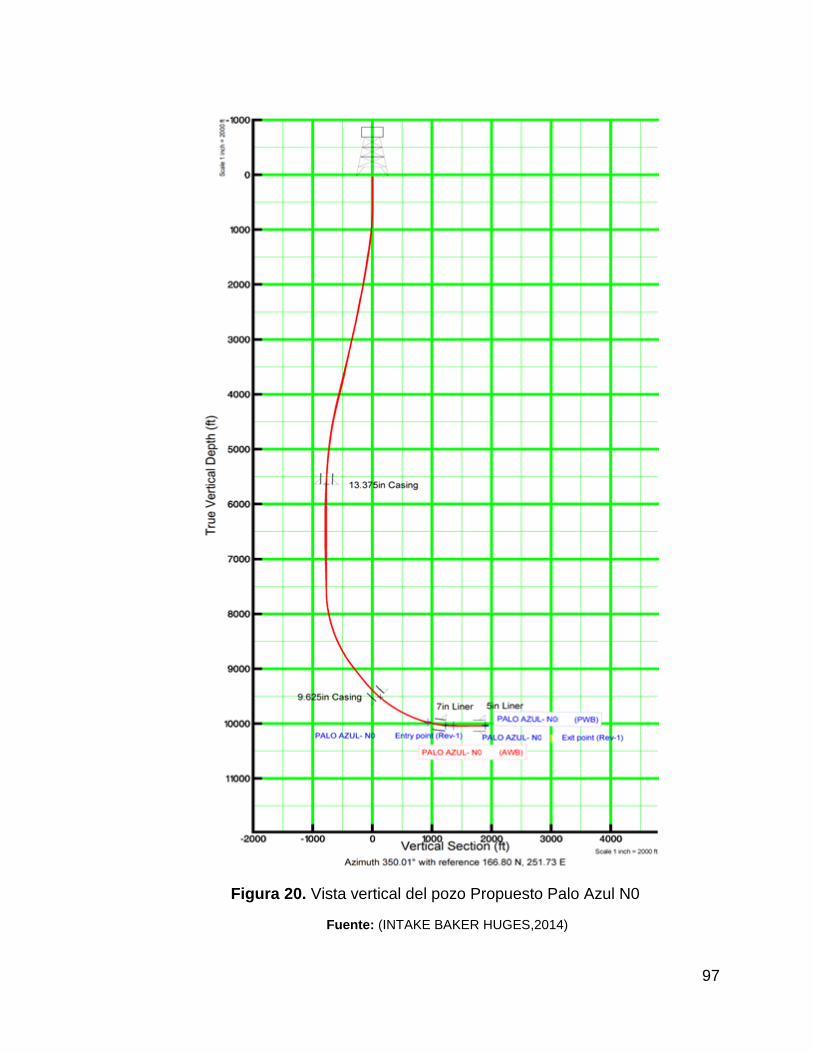
97
Figura 20. Vista vertical del pozo Propuesto Palo Azul N0
Fuente: (INTAKE BAKER HUGES,2014)

98
4.3.2. PROPUESTA PARA EL ENSAMBLAJE DE FONDO PARA CADA
SECCIÓN PARA EL POZO PALO AZUL N0
En base al estudio de vibraciones para el pozo propuesto del campo PALO
AZUL y para el pozo propuesto los ensamblajes más recomendados son:
4.3.2.1. Sección BHA 16” del pozo Palo Azul N0
Tabla 45. Ensamblaje propuesto para la sección 16” del pozo Palo Azul N0
Fuente: (INTAKE, BAKER HUGHES, 2014)

99
4.3.2.2. Sección BHA 12.25” del pozo Palo Azul N0
Tabla 46. Ensamblaje propuesto para la sección 12.5” del pozo Palo Azul N0
Fuente: (INTAKE, BAKER HUGHES, 2014)
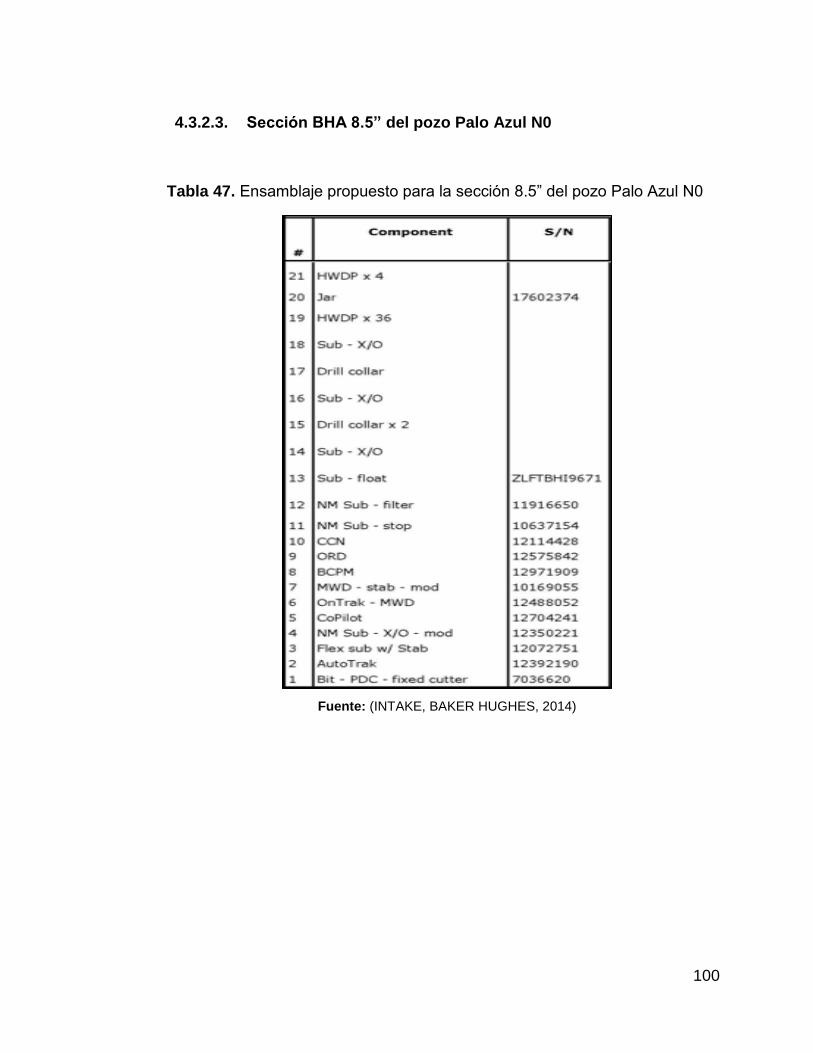
100
4.3.2.3. Sección BHA 8.5” del pozo Palo Azul N0
Tabla 47. Ensamblaje propuesto para la sección 8.5” del pozo Palo Azul N0
Fuente: (INTAKE, BAKER HUGHES, 2014)

101
4.4. INTERPRETACIÓN DE VIBRACIONES PARA EL CAMPO
SACHA.
Tabla 48. Vibraciones del campo SACHA
POZO VIBRACIONES LATERALES
VIBRACIONES AXIALES
VIBRACIONES TORCIONALES
SACHA 220 32 23 45
SACHA 276 29 21 50
SACHA 277 28 19 53
SACHA 278 29 21 50
SACHA 286 28 20 52
SACHA 287 30 22 48
SACHA 240 29 20 51
SACHA 241 32 30 48
SACHA 442 30 19 51
SACHA 416 31 17 52
Fuente: (MAYACELA. C, 2014)
Para el caso de los pozos del campo SACHA la mejor perforación desde un
punto de vista de las vibraciones es del pozo SACHA 286, pozo tipo "S" , el cual
presenta menos vibraciones laterales que son las más destructivas durante la
perforación, vibraciones axiales no es común durante la perforación ya que no
se evidencio saltos en la sarta de perforación ni mucho aumento de la ROP y
vibraciones torcionales generalmente se presentaron al atravesar formaciones
duras (conglomerados, calizas, arenas abrasivas).
4.4.1. PROPUESTA DE PERFORACIÓN PARA EL POZO SACHA 2
Es un pozo direccional, llamado Sacha 2, con una Dirección constante de
221.85°, a una profundidad de 3500ft, en donde empieza a construir a razón
1.80°/100ft alcanzando una inclinación máxima de 26.60° a los 4978ft MD.

102
A partir de esta profundidad se mantiene tangente hasta los 9307ft MD
(pasando por el casing de 13 3/8” a 4000ft MD), en donde empieza a tumbar
inclinación a razón de 2.0°/100ft hasta la Profundidad Final a 10662ft MD,
pasando por los Objetivos Principales y Secundarios arena ( U inferior) con un
radio de tolerancia de 50ft.
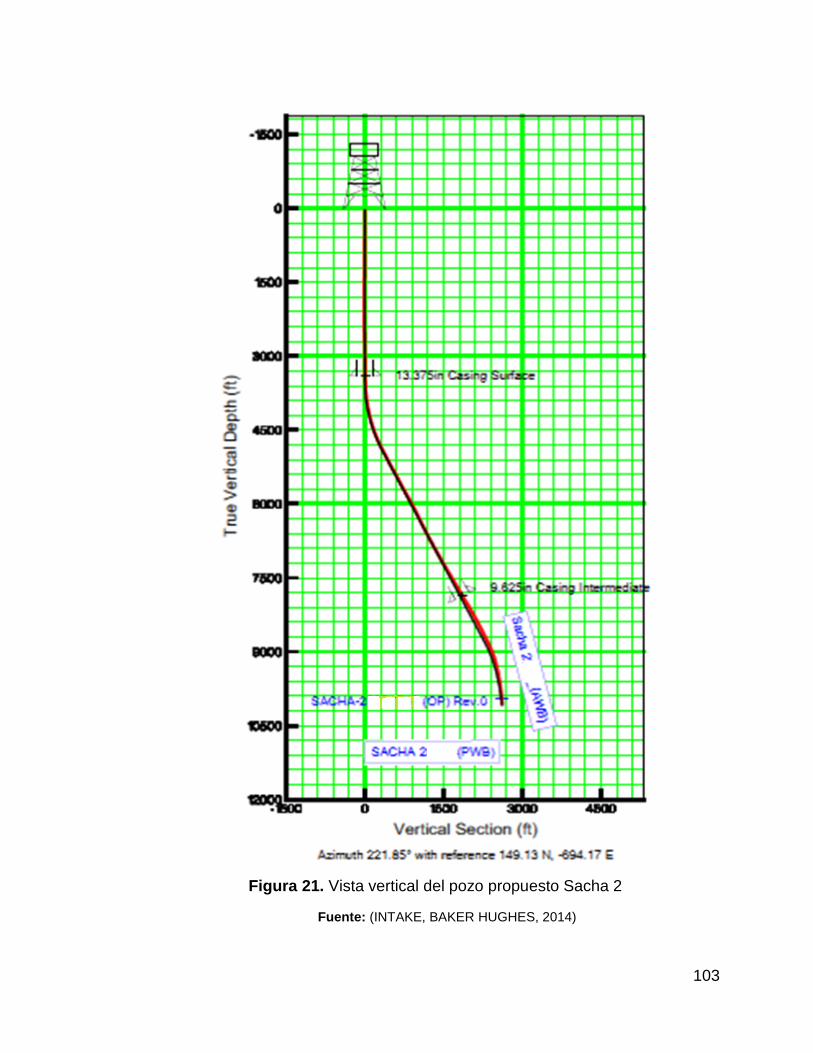
103
Figura 21. Vista vertical del pozo propuesto Sacha 2
Fuente: (INTAKE, BAKER HUGHES, 2014)

104
4.4.2. PROPUESTA PARA EL ENSAMBLAJE DE FONDO PARA CADA
SECCIÓN PARA EL POZO SACHA 2
En base al estudio de vibraciones para el pozo propuesto del campo SACHA
los ensamblajes más recomendados son:
4.4.2.1. Sección BHA 16” del pozo Sacha 2
Tabla 49. Ensamblaje propuesto para la sección 16” del Pozo Sacha 2
Fuente: (INTAKE, BAKER HUGHES, 2014)
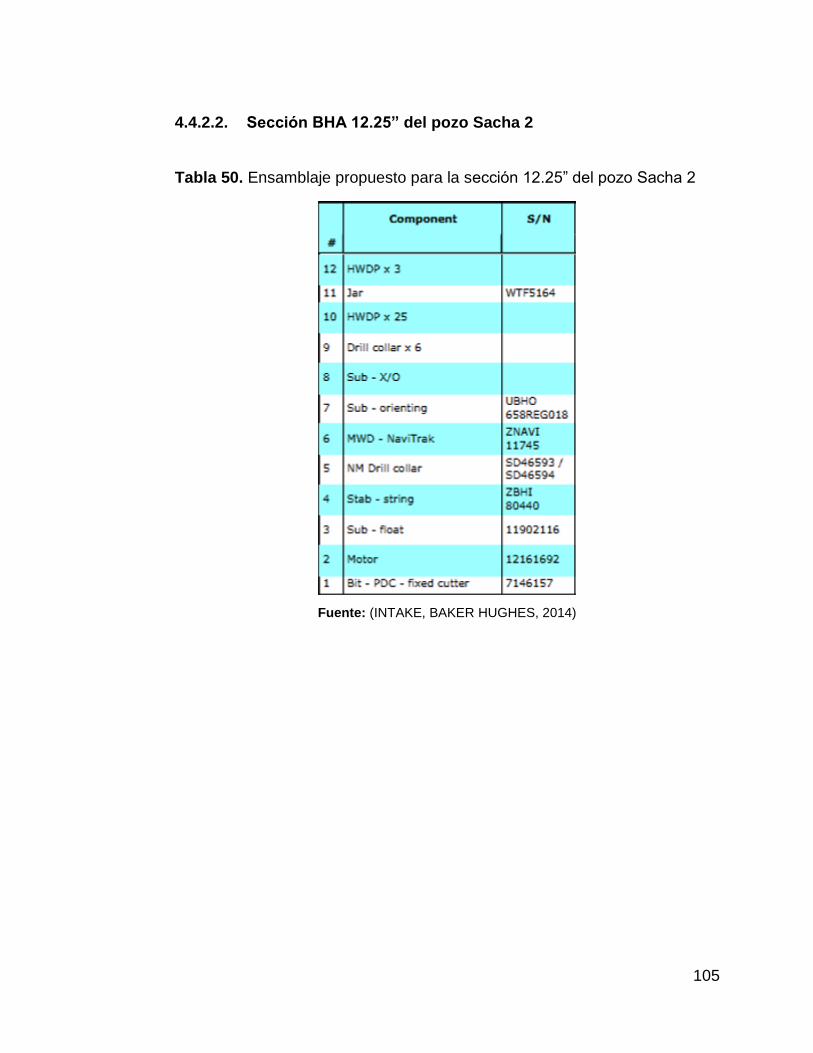
105
4.4.2.2. Sección BHA 12.25” del pozo Sacha 2
Tabla 50. Ensamblaje propuesto para la sección 12.25” del pozo Sacha 2
Fuente: (INTAKE, BAKER HUGHES, 2014)

106
4.4.2.3. Sección BHA 8.5” del pozo Sacha 2
Tabla 51. Ensamblaje propuesto para la sección 8.5” del pozo Sacha 2
Fuente: (INTAKE, BAKER HUGHES, 2014)
107
CONCLUSIONES Y
RECOMENDACIONES

108
5. CONCLUSIONES Y RECOMENDACIONES
5.1. CONCLUSIONES
• Para el caso de vibraciones torsionales y stick slip en superficie se
evidencia un aumento en torque con niveles erráticos y no uniformes, y
frecuentemente paro de rotaria, generalmente esto sucede al atravesar
formaciones duras y abrasivas (Conglomerados, calizas, arenas
abrasivas), o por efecto de mala limpieza en el hoyo debido a que en
fondo se disminuye o se detiene la rotación del BHA a causa de que la
fricción de resistencia supera el torque aplicado.
• Las vibraciones axiales es el tipo de vibración más destructivo y puede
generar mayores daños en los componentes del BHA. Además inducen a
vibraciones laterales.
• Las vibraciones axiales se identifican en superficie mediante saltos de la
sarta de perforación y disminución de la ROP. Es un principal indicativo
de cortes irregulares de la broca, daño de la broca o cambios bruscos de
litología.
• El diseño de la sarta de perforación debe permitir tener un control a todo
tiempo en los posibles cambios de los parámetros de perforación
dependiendo de las condiciones necesarias en el fondo del pozo como
son WOB y RPM, que son las principales fuentes de energía empleada
para la perforación del agujero.
109
• Los daños que producen las vibraciones son principalmente la fatiga del
material, desconexiones, falla o ruptura prematura a lo largo de la sarta
de perforación.
• Un control insuficiente o escaso de las vibraciones a tiempo real afecta
gravemente a la estabilidad del pozo teniendo como consecuencia
derrumbes o fractura de la formación donde se esté perforando.
• Para los equipos de control como las herramientas de MWD, LWD, RSS
(Rotary Steerable System), al encontrarse con niveles altos de vibración,
los componentes eléctrico/mecánicos de las herramientas se ven sujetos
a un posible daño, causando datos erróneos de MWD, interferencia en
la señales de la herramienta y en casos extremos pérdida de la
herramienta.
• Las mediciones realizadas por las herramientas de MWD, proporcionan
al perforador una mejor perspectiva de los problemas que pueden
suscitarse en el pozo a causa de los fenómenos vibratorios, además de
dar la capacidad de intervenir de forma inmediata ante el problema.
110
5.2. RECOMENDACIONES
• Cuando los niveles de torsión de la sarta aumentan a niveles más
severos se conoce el efecto de Stick Slip (medido en escala de 1-7
g_RMS) provocando una rotación inversa de la broca. La forma más
recomendable de mitigar el Stick Slip es incrementando la cantidad de
RPM en superficie de (10 a 15) o igualmente disminuir el WOB (5 a 10
Klbs) monitoreando durante 4 a 8 minutos hasta que los parámetros sean
conocidos por el BHA.
• La forma más recomendable de mitigar la vibración lateral es
disminuyendo las RPM en superficie de 10 a 20 y monitorear durante 4-6
minutos. Si vibraciones no disminuyen levantar de fondo y regresar con
50-60 RPM e incrementar el WOB progresivamente evitando tener Stick
Slip, seguidamente aumentar las RPM para mejorar la ROP.
• La mejor manera de atenuar vibraciones axiales es levantando de fondo
y parando la rotación, regresar a fondo con aproximadamente la mitad de
las RPM en superficie e incrementar progresivamente el WOB hasta que
los nuevos parámetros sea conocidos por el BHA y se genere un buen
patrón de corte. Finalmente incrementar las RPM a las que se venía
trabajando.

111
NOMENCLATURA
• Profundidad medida (MD): es la distancia o longitud del hoyo.
Representa la distancia de la trayectoria del pozo o la medición de la
tubería en el hoyo.
• Profundidad vertical verdadera (TVD): es la proyección de la
profundidad medida en la vertical. Representa la distancia vertical de
cualquier punto del hoyo al sistema de referencia.
• Desvío: es la distancia horizontal de cualquier punto del hoyo al eje
vertical de referencia, también se le conoce como desplazamiento o
desviación horizontal.
• Punto de arranque (“Kick off Point, KOP”): es la profundidad del hoyo
en la cual se coloca la herramienta de deflexión inicial y se comienza el
desvío.
• Pata de perro: término aplicado a un repentino cambio de dirección en el
pozo; un codo causado por dicho cambio de dirección.
• Buzamiento: es el ángulo entre el plano de estratificación de la
formación y el plano horizontal, medido en un plano perpendicular al
rumbo.
• Severidad de “Pata de perro”: Es la tasa de cambio del ángulo entre
dos secciones, expresado en grados por unidad de longitud
• Ángulo de inclinación: es el ángulo formado del pozo con respecto a la
vertical.
• Sarta: serie de tubos que se unen para formar la sarta de perforación.
Puede ser de revestimiento o de producción.
• Torre: término que se usa para indicar tanto la torre en sí, como
cualquier otra estructura que soporta carga; se refiere generalmente a la
estructura desde la cual se inserta la broca y la tubería para perforar un
112
pozo. La base de la torre es la subestructura de sustentación, en la cual
se alojan los preventores de reventones y el cabezal del pozo.
• Pozo: agujero perforado en la roca desde la superficie de un yacimiento
a efecto de explorar o para extraer aceite o gas.
• Perforación: operación que consiste en perforar el subsuelo con la
ayuda de herramientas apropiadas para buscar y extraer hidrocarburos.
• Explotación: operación que consiste en la extracción de petróleo y/o gas
de un yacimiento.
• Azimuth: ángulo desde el Norte, en dirección de las agujas del reloj, de
la desviación del hoyo.

113
BIBLIOGRAFÍA
• Gabriel P. "Drill String Vibration How to Identify and Supress" SPE
39002 SPE International 1997. (s.f.).
• Aerretad, T. (2005). An Experimental and Theorical Study of Coupled
Boundary Conditions for Vibrations in Drillstring. SPE 15563 International.
• Akinniranye, G. (2009). Implementation of a Shock and Vibration
Mitigation Process: Achieving Real-Time Solutions and Savings . SPE-
107903.
• Ashley, D. (2001). Extending BHA Life with Multi-Axis Vibration
Measurements . SPE/IADC 67696.
• Bailey, J. R. (2009). Managing Drilling Vibrations through BHA Design
Optimization. IPTC 13349 IPTC .
• Balachandran, B. (2006). Vibrations . Thomson.
• Chen, D. C.-K. (2006). Real-Time Downhole Torsional Vibration Monitor
for Improving Tool Performance and Bit Design . IADC/SPE 99193.
• Cheser, S. W. (2010). Operator/Service Company Research
Collaboration Leads to Reduced Downhole Vibration Levels and
Improved Drilling Performance . SPE 133801 SPE International .
• Craig, A. D. (2010). High Frequency Downhole Dynamic Measurements
Provide Greater Understanding of Drilling Vibration in Performance Motor
Assemblie. IADC/SPE 128211.
114
• Cromb, J. R. (2000). Cost Savings through an Integrated Approach to
Drillstring Vibration Control. IADC/SPE 59197.
• Delgado, C. A. (22 de 01 de 2008). Scribd. Obtenido de
http://www.cedex.es/lg/geofis/cd_hole.htm.
• F.E, D. (2005). Maximizing ROP With Real-Time Analysis of Digital Data
and MSE. IPTC 10607 IPTC .
• Fanchi, J. R. (2006). Petroleum Engineering Handbook (Vol. Vol. 1). SPE
SPE International.
• Halsey, G. W. (2006). Drillstring Torsional Vibrations: Comparison
Between Theory and Experiment on a Full-Scale Research Drilling Rig .
SPE 15564 .
• Heisig, G. (2000). Lateral Drillstring Vibrations in Extended-Reach Wells .
IADC/SPE 59235.
• Heisig, G. (2002). Downhole Diagnosis of Drilling Dynamics Data
Provides New Level Drilling Process Control to Driller. SPE 49206 .
• Jaggi , A., & Upadhaya, S. (2007). Successful PDC/RSS Vibration
Management Using Innovative Depth-of-Cut Control Technology: Panna
Field, Offshore India. SPE/IADC 104388.
• Mansure, A. (2003). Interpretation of Diagnostics-While-Drilling Data.
SPE 84244 International.
• Mensa-Wilmot, G. (2002). The Effects of Formation Hardness,
Abrasiveness, Heterogeneity and Hole Size on PDC Bit Performance.
SPE/IADC 67698 IADC .

115
• Mensa-Wilmot, G. (2010). Drilling Efficiency and Rate of Penetration:
Definitions, Influencing Factors, Relationships, and Value. SPE 128288 .
• P., G. (2007). Drill String Vibration How to Identify and Supress. SPE
39002 SPE International.
• Perez, D. (2007). Application of Small Vibration Logging Tool Yields
Improved Dynamic Drilling Performance . SPE 105898.
• Reckmann, H. ( 2010). MWD Failure Rates Due to Drilling Dynamics.
SPE 127413.

116
ANEXOS

117
Anexo 1
Ensamblaje de fondo de broca de 16”, motor steerable 9
½” para la perforar sección de 16”
118
Anexo 2
Configuración del Ensamblaje de fondo (MWD
8 ½ ”para sección de 16”).

119
Anexo 3
Daños en la broca a causa de la vibración

120
Anexo 4
Pérdida de nariz debido a la vibración

121


















