Underwater Robot
16
422 Underwater Robots: Past, Present and Future Andrea Caiti, University of Pisa, Pisa/Italy, [email protected] Vincenzo Calabrò, University of Pisa, Pisa/Italy, [email protected] Daniele Meucci, University of Pisa, Pisa/Italy, [email protected] Andrea Munafò, University of Pisa, Pisa/Italy, [email protected] Abstract Tele-operated (ROV – Remotely Operated Vehicles) or unsupervised (AUV – Autonomous Underwater Vehicles) marine robots have found their solid application and commercial niche in several underwater tasks. ROVs are ubiquitous in intervention and safe & rescue applications, while AUVs are common in exploration and surveillance. While revising some success stories of the past, this paper highlights the current challenges in the field of autonomous underwater robot operation: intervention and manipulation tasks with untethered vehicles, oriented toward deep water field operations; network of autonomous mobile sensors for monitoring and surveillance, in environmental and security hazards; long endurance, energy efficient vehicles for oceanographic exploration, including biomimetic and nature-inspired design. 1. Introduction Robotics is essentially an interdisciplinary field, requiring insights from many different scientific and engineering domains: chemistry and material science, electronics and nanotechnologies, mechanical design, sensors and actuators, computer science, control and communication systems, etc. Indeed, it is difficult for us to single out an engineering domain which has given no contribution whatsoever to robotics. Robotic science, intended as the set of methodologies for the integrated design of robotic devices, has progressed enormously in the recent past. The fall-out of this progress in the application domain is evident to everyone, sometimes even taken for granted, notwithstanding the fact that the increased and widespread diffusion of robots in industries, services and everyday life has started only in the last quarter of the 20 th century. In particular, the greatest part of industrial production and manufacturing by now employs routinely robotic technology, either with human supervision or in a totally autonomous fashion, for tasks as welding, micro- and macro-assembling, painting, pieces movement, storehouse management. Also service robotics is here to stay, with a wealth of cleaning and washing robots, grass mowers, fruit pickers, pool cleaners, just to name a few. Robotic medical aids are also very diffuse and common, Fig.1. Robotics is playing a key role in space operations and planet exploration, with many people still remembering the rover “Sojourner” that collected the first samples of soil of the planet Mars in 1997, and in military applications, Fig. 2. The robotics community provides a considerable effort in developing search and rescue robots, Fig. 3. The CRASAR (Center for Robot-Assisted Search And Rescue), established at the Texas A&M University, is managing a worldwide network to provide robotic aids, for free, in case of natural disasters or calamities. By looking at Figs.1 to 3, which are certainly not exhaustive, one can appreciate the wide diversity of robotic designs, and the sophistication and maturity reached by some of them. The more so, considering that most of the complex tasks that those robots have to fulfill are executed in an autonomous way. It is likely, though, that twenty or thirty years ago few people would have doubted that the robotic field would have reached the present-day maturity; in fact, it is likely that the progress of robotics has been slower than expectations. And the development of underwater robotics has progressed at a slower pace than any other robotics application field, due to the harshness and hostility of the marine environment that poses very severe challenges and constraints, Bellingham (2007).
-
Upload
le-dinh-phong -
Category
Documents
-
view
95 -
download
3
Transcript of Underwater Robot
-
422
Underwater Robots: Past, Present and Future
Andrea Caiti, University of Pisa, Pisa/Italy, [email protected] Vincenzo Calabr, University of Pisa, Pisa/Italy, [email protected]
Daniele Meucci, University of Pisa, Pisa/Italy, [email protected] Andrea Munaf, University of Pisa, Pisa/Italy, [email protected]
Abstract
Tele-operated (ROV Remotely Operated Vehicles) or unsupervised (AUV Autonomous Underwater Vehicles) marine robots have found their solid application and commercial niche in several underwater tasks. ROVs are ubiquitous in intervention and safe & rescue applications, while AUVs are common in exploration and surveillance. While revising some success stories of the past, this paper highlights the current challenges in the field of autonomous underwater robot operation: intervention and manipulation tasks with untethered vehicles, oriented toward deep water field operations; network of autonomous mobile sensors for monitoring and surveillance, in environmental and security hazards; long endurance, energy efficient vehicles for oceanographic exploration, including biomimetic and nature-inspired design.
1. Introduction
Robotics is essentially an interdisciplinary field, requiring insights from many different scientific and engineering domains: chemistry and material science, electronics and nanotechnologies, mechanical design, sensors and actuators, computer science, control and communication systems, etc. Indeed, it is difficult for us to single out an engineering domain which has given no contribution whatsoever to robotics. Robotic science, intended as the set of methodologies for the integrated design of robotic devices, has progressed enormously in the recent past. The fall-out of this progress in the application domain is evident to everyone, sometimes even taken for granted, notwithstanding the fact that the increased and widespread diffusion of robots in industries, services and everyday life has started only in the last quarter of the 20th century. In particular, the greatest part of industrial production and manufacturing by now employs routinely robotic technology, either with human supervision or in a totally autonomous fashion, for tasks as welding, micro- and macro-assembling, painting, pieces movement, storehouse management. Also service robotics is here to stay, with a wealth of cleaning and washing robots, grass mowers, fruit pickers, pool cleaners, just to name a few. Robotic medical aids are also very diffuse and common, Fig.1.
Robotics is playing a key role in space operations and planet exploration, with many people still remembering the rover Sojourner that collected the first samples of soil of the planet Mars in 1997, and in military applications, Fig. 2. The robotics community provides a considerable effort in developing search and rescue robots, Fig. 3. The CRASAR (Center for Robot-Assisted Search And Rescue), established at the Texas A&M University, is managing a worldwide network to provide robotic aids, for free, in case of natural disasters or calamities.
By looking at Figs.1 to 3, which are certainly not exhaustive, one can appreciate the wide diversity of robotic designs, and the sophistication and maturity reached by some of them. The more so, considering that most of the complex tasks that those robots have to fulfill are executed in an autonomous way. It is likely, though, that twenty or thirty years ago few people would have doubted that the robotic field would have reached the present-day maturity; in fact, it is likely that the progress of robotics has been slower than expectations. And the development of underwater robotics has progressed at a slower pace than any other robotics application field, due to the harshness and hostility of the marine environment that poses very severe challenges and constraints, Bellingham (2007).
-
423
Fig. 1: From top left, clock-wise: industrial manipulators in automotive production; autonomous laser guided vehicles for parts and pieces transfer in industrial manufacturing; dustbot, a service robot for
garbage collection; Asimo, a service robot for human assistance.
Fig. 2: From left to right: the Mars rover Sojourner, a robotic arm on a satellite, an Unmanned Aerial Vehicle (UAV) holding a micro-camera for intelligence missions.
Fig. 3: Search and rescue robots, designed to carry sensors over rough, difficult-to-reach terrains
-
424
Risk of structural failures due to the increase of pressure with depth, strong motion disturbances due to sea currents and/or waves, limitation in optical visibility due to turbidity, strong attenuation of any kind of electromagnetic transmission, all pose tight constraints in the design and operation of underwater robots. Nevertheless, both tethered (ROV Remotely Operated Vehicles) and unsupervised (AUV Autonomous Underwater Vehicles) robots have by now found their solid application and commercial niche in several underwater tasks. ROVs are ubiquitous in intervention and safe & rescue applications, while AUVs are more and more common in exploration and surveillance tasks. Commercial domains for the underwater robots are the oil and offshore industries, defense, and ocean sciences.
This paper briefly reviews the progress of the last twenty years of developments in underwater robotics toward industrial and real-world applications; more than writing the history of marine robotics, the ambition is to provide the reader with a sufficiently informative picture and list of references in the field, from which each one can start his own bibliographic research. While we have tried to be comprehensive, any kind of review is bound to have limitations, and we had no ambition to create a complete list of reference.
Looking at the future, the paper aims at identifying the current research challenges in marine robotics. Although this indication may also be debatable and subject to criticism, we believe that future developments will occur along three main lines:
Networks of autonomous mobile sensors for monitoring and surveillance; Long endurance, energy efficient vehicles for oceanographic exploration, including bio-
mimetic and nature-inspired design. Autonomous intervention and manipulation tasks with untethered vehicles, oriented toward
deep water field operations.
2. Twenty years of increasing autonomy
2.1 ROV: Remotely Operated Vehicles
ROVs essentially reached technological maturity in the 80s, Christ and Wernli (2007). By the early 90s, ROVs were established as commercially available underwater robots, usually equipped with one or two manipulator arms, with the possibility of mounting different tools (working class ROVs). These vehicles are characterized by an open-frame structure, and by the umbilical cable through which data and commands are exchanged. Often also energy is supplied to the vehicle from the surface commanding platform. ROVs have limited movement capabilities, due to the non-slender body structure, designed first of all to exert power, and due to the maximum tether length. They were at the time and still are mainly used for underwater work in the offshore industry (inspection, cable/pipe lay-out, repair Fig. 4, from Wood et al. (1994); for scientific sampling; in search and rescue and in military applications as mine search and counter-measurements). ROVs allow tele-operated maneuvering, and they still require a skilled pilot for commanding the vehicle. Already in the 90s several navigation aids were installed on many ROVs, such as auto-depth and auto-heading servos. The need of a surface vessel properly equipped to deploy and recover an ROV, and the limits in maneuverability of the vehicle itself, have led the research on ROV to pursue even more autonomy in the Guidance, Navigation and Control (GNC) system, Caccia et al. (2000); to develop specialized designs for specific purposes (for instance micro-ROVs, equipped just with a small camera, for inspection in shallow waters and harbors); to increase the efficiency and execution of the task; to increase the operating depths, a trend led by the increase in depth of the offshore industry, Cohan (2008). The diffusion of ROVs has been enlarged by vehicles for observation tasks, Christ and Wernli (2007). In particular, there is a trend toward replacing human divers whenever possible with ROV deployment, in scientific environmental monitoring, civil and military inspection, archaeological work, Conte et al. (2009); this has led to the commercialization of a great number of small, lightweight vehicles, deployable even from rubber boats. The ROV market is still growing, led by
-
425
working class ROVs, whose demand is driven by the ocean drilling industry and oil and gas companies. Fig.5 shows three contemporary ROVs, a working class ROV and two observation ROVs; the similarity of the working class one with its predecessor of Fig.4 is striking.
Fig. 4: The TRITON ROV, with a manipulator visible on the left side, Wood et al. (1994)
Fig. 5: From left to right: working class ROV; ISME ROV on an inspection and mapping mission over an archaeological site, Conte et al. (2009); micro-ROV for inspection in very shallow water
2.2. AUV: Autonomous Underwater Vehicles
Unlike for ROVs, in the early 90s there was no commercially available AUV, i.e.; a vehicle without a tether able to fulfill a mission in a completely autonomous way. While the generic idea of having an unmanned submarine required no particular leap of imagination, the difficulties linked to the absence of any kind of communication between the vehicle and a mission monitoring station had so far prevented the development of vehicles with these characteristics. This is a peculiar aspect that it is easy to overlook from the outside: without tether, and without possibility of communicating with the vehicle, experimentation is blind, i.e.; analysis of any experimentation with the vehicle occurs off-line, after the experiment, looking at the vehicle logs - if the vehicle has survived the experimental mission. Pool tests are important, but not representative of the behavior at sea; and the risks associated to experimentation at sea prevented most of the research labs with low budget (typically, university labs) to invest in this particular field. In the USA, Draper Labs developed two large-scale, torpedo-shaped vehicles as test-bed for Navy projects, Blidberg (2001). While there was a rising interest in the potential of AUV technology from the point of view of the applications, the technology was not mature enough to answer the expectations; in particular, in our opinion, the costs associated, the limited success of the experimentation, and the excess in expectations raised by the researchers themselves to gain support for the research program led to some skepticism from the defense users on the whole AUV concept throughout the early 90s.
In parallel to the ambitious military-oriented programs, there were research groups focusing on the development of smaller vehicles for inspection and mapping purposes. Among these, the MIT group in the USA developed the Odissey AUV, Bellingham et al. (1994), while in Europe the European Union sponsored the project that led to the MARIUS AUV, Pascoal et al. (1997), which was one of
-
426
the first vehicles not shaped as a torpedo. A vision for the future of operational oceanography, exploiting the new possibilities of autonomous sensing, including AUVs, was put forward in Curtin et al. (1993), a famous paper in which the concept of Autonomous Ocean Sampling Network (AOSN) was formulated: it was envisioned that future oceanographic measurements would take place through a combination of fixed and mobile autonomous sensors, all connected in a network, some installed permanently, some deployed on demand, according to the evolution of the oceanic features of interest. It is difficult to underestimate the importance of this paper: it has provided many researchers with a guideline and a long-term objective that has focused many of the intermediate achievements of the subsequent years. To anticipate some of the story, AOSN has become an operational reality with the series of experiments in Monterey Bay which started about 15 years after the original paper, Bellingham (2009).
By 1994 there was a growing awareness in the research community that the field was effectively maturing; critical technologies were identified, Yuh and Negahdaripour (1994) in the fields of:
navigation; command and control; components reliability; energy storage and supply.
In the same report, it was suggested to have a small number of high-profile projects as demonstrative test-beds of the potential of the technology, to build confidence in the user community.
The second half of the 90s saw several initiatives that, if not strictly following the guidelines of the 1994 workshop, did address the critical technologies there outlined. In particular, Kongsberg Maritime, through a combined effort with the Norwegian Defence Research Establishment (FFI) and the national oil company Statoil, and with additional support by university labs, developed the HUGIN class AUV, Fig.6, Hagen et al. (1999). This vehicle was specifically designed for seabed and sub-bottom mapping surveys in deep water, with an endurance originally up to two days (currently 60 h). The success of the project was due, among other things, to the capability developed in-house by Kongsberg to have an acoustic communication link with the vehicle through the Hi-Pap localization/acoustic modem system. This system allowed to monitor the mission from a surface ship, and provided georeferentiation to the vehicle. The Hugin 3000, rated to 3000 m depth, completed its acceptance and qualification tests in year 2000. First acquired by C&C Technologies and deployed in the Gulf of Mexico, by 2007 the commercial HUGIN fleet had completed 150.000 km of seabed surveys. The reliability of the system, despite its costs and the need of a surface platform to follow it during operation, made it an immediate success and gave momentum to the AUV development. One particular aspect, from the commercial side, was the demonstration that the operational costs of a HUGIN survey were lower than the equivalent costs of the same survey with a deep-tow system; moreover, data quality from the HUGIN AUV was better, Chance et al. (2000). The success of the initiative led to the development of a defense version of the vehicle, and to yet another version for exploration of deeper sites.
In the same period, while Bellingham moved from MIT to the Monterey Bay Aquarium Research Institute (MBARI), in the area where also the Naval Postgraduate School was investigating advanced control systems for AUVs, Marco and Healey (2001), the MIT group launched a long-term experimentation program together with the NATO Undersea Research Centre (NURC) in Italy. The GOATS program allowed a series of test with the new-generation Odyssey vehicles employed as platforms for acoustic and oceanographic sensors. One of the clever aspect of the initiative was its openness to participation of research group from all over the NATO countries, with NURC making available its sea-going facilities and experience, Bovio and Schmidt (2001), Moran et al. (1999). Many groups have gained tremendous experience and hindsight from the GOATS program.
-
427
Fig. 6: HUGIN AUV on deck before deployment
A third key initiative of the second half of the 90s was the development of the REMUS AUV at the Woods Hole Oceanographic Institute (WHOI), Allen et al. (1997). The REMUS, Fig.7, is a very small, lightweight vehicle, specifically designed for coastal oceanography, easy to carry and to deploy, and with costs of more than an order of magnitude less than the HUGIN. Clearly, the application domain of the REMUS was complementary to that of the HUGIN; but it was an interesting demonstration on how, focusing on the mission, instead than trying to show that the same basic AUV can accomplish many different missions, it was possible to dramatically reduce the budget cost of the research, development and technology transfer, while reaching the mission goal. The potential of the REMUS caused a renewed enthusiasm in Navy circles, and WHOI was asked to develop a Navy version to be employed in Mine Counter Measurements operation, Stokey et al. (2001). REMUS vehicles were deployed in operational missions by the US Navy in 2003.
The HUGIN and REMUS projects, as well as the GOATS program, were instrumental in gaining visibility and appreciation from the users community, and at the end of the 90s the degree of confidence in the potential of AUVs was high both in the scientific and the user community. The review paper Yuh (2000) shows how, a few years after the 1994 workshop, Yuh and Negahdaripour (1994), the challenges then identified by the research community had been addressed and satisfactory solutions had been found. From a methodological view point, throughout the period two important contributions to allow a systematic approach to GNC of marine vehicles are due to Fossen (1994) and Antonelli (2003). Both contributions pursue a system-oriented approach to the modeling and control of underwater robots. Fossen (1994) is more general, and the theory there discussed is in fact applied also to surface vessels: the book has the great merit of showing how the hydrodynamic equations can be converted, for GNC purposes, to ordinary differential equations in standard form. Antonelli (2003), within the same framework, includes a systematic analysis of floating vehicles-plus-manipulator systems. An emerging aspect of the developments in this period consists in the importance of acoustic localization/communication, either to monitor or to adapt the mission. We already mentioned the Hi-Pap system. The WHOI team developed in these years the acoustic Micromodem, Freitag et al. (2005), installed on the REMUS for both localization and communication.
Fig. 7: REMUS vehicles (WHOI)
-
428
Related to this period, though with a possibly different background, are research initiatives in Japan, Ura (2000). The emphasis of Uras group was on on-board intelligence and mission adaptation capabilities of the systems, and resulted in a series of different vehicles that, starting from the mid-90s, were able to conduct missions in a great variety of situations.
Autonomy and on-board intelligence were present in all the vehicles developed in the late 90s, and many vehicles were proven capable to conduct missions without need of acoustic monitoring/ supervision and external localization aid. However, for most of the mapping survey missions, acoustic localization with external sensors, Caiti et al. (2005) had to be present, to be used at least in a post-processing phase to properly georeference the data, due to the drift of on-board Inertial Measurement Units (IMU).
The confidence acquired at the turn of century resulted in the development of numerous vehicles of different kinds, with increased specialization of tasks and mission oriented designs, in a way similar to the very specialized development of the ROV world in the previous decades. New possibilities started to appear and to find interesting and valuable application niches.
Among these new applications, Autonomous Surface Crafts (ASC) started to gain momentum, Leonessa et al. (2003), Alves et al. (2006), Caccia (2006), Ghabcheloo et al. (2009). ASCs are easier to develop than AUVs from the point of view of the navigation, having access, at least in principle, to GPS. Experimentation with ASCs makes it possible to decouple navigation difficulties from all the other sources of disturbances peculiar to the marine environment. So, it may have been expected to see ASCs as predecessors of AUVs. This has not been the case: the progress in the two fields has proceeded at best in parallel. However, ASCs have now a clear potential for applications in defense and security, Mies (2010), and for hazardous inspection missions, Bash (2008). From a scientific viewpoint, ASCs are an ideal vehicle to collect samples from the sea surface, for oceanographic and marine biology purposes. They can also be efficiently used as test-bed for multi-vehicle operations.
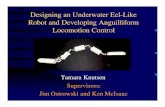
Another class of vehicle, now largely diffused, is oceanographic gliders, Webb et al. (2001), Fig.8. These vehicles were designed primarily for oceanographic purposes, with the mission of sampling in depth the water column when moving from one station to another. Usually equipped with standard CTD (Conductivity Temperature Depth) probes, gliders do not have propellers, but change their buoyancy and asset by active ballast variation and displacement; once the system is negative/positive buoyant and it has the appropriate pitch, the vehicle control surface will produce a net movement in the horizontal plane. So gliders are characterized by a typical yo-yo motion in the water column while moving from one point to another. Since actuation of the system is required only to change buoyancy and pitch, i.e. at the turning points of the yo-yo path, energy consumption of oceanographic gliders is very limited. Indeed, gliders have shown the ability of conducting ocean sampling mission of several months length, Holling et al. (2010). Each time the vehicle resurfaces, it gets into GPS/satellite contact, transmit the data to a ground station, and receives further indication on the next route to pursue. While path following accuracy and speed are not to be expected from gliders, they have been shown very versatile in terms of mission reconfiguration and adaptation, and in coordinated missions, Bellingham (2009), Leonard et al. (2010).
Fig. 8: Slocum oceanographic glider, from www.webresearch.com
-
429
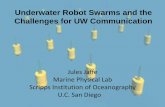
Hybrid designs also started to appear in this period. Our lab ISME has been involved in the development of the Folaga hybrid vehicle, Alvarez et al. (2009), Caffaz et al. (2010), Fig. 9. The Folaga is characterized by an actuation system which is similar to underwater gliders for buoyancy and pitch control, but it has also jet-pumps and/or screw propellers for yaw and surge motion. The vehicle, designed for shallow/coastal waters applications, has very high maneuverability, since its motion does not rely on control surfaces. Moreover, the vehicle can hover, rest on the sea bottom, dive vertically along the depth axis. All these features can be exploited in a number of different environmental monitoring and surveillance systems. The small dimensions, lightweight and very low cost of the Folaga make it also feasible for prototypal experimentation in multi-vehicle or multi-purpose systems.
From year 2005 on, mission autonomy with a single vehicle can be considered an achieved goal by any AUV design, constantly repeated in experiments and transferred to commercial applications. Many different specific designs have appeared tailored to specific application domains; in many cases, this has led to a dramatic cost reduction, as compared to the systems available in the early 90s, and also to great improvements in operability, maintenance, infrastructure needs. In particular, for coastal survey, mapping and environmental monitoring, a wealth of different systems has been developed, at research and/or commercial level, Nicholson and Healey (2008). From a market point of view, some research prototypes have been brought to the market by academic spin-off companies, which in turn have been acquired by larger companies: a typical examples is Hydroid (for the WHOI REMUS), which is now part of Kongsberg Maritime.
2.3 Toward autonomous cooperation
The availability of low-cost, small vehicles, at least for the coastal environment, has in turn allowed strategic research and experimentation on cooperative missions executed by a team of AUVs. Here cooperation may be intended in different ways, from simply having different vehicles pursuing different pre-planned missions in different areas, to interaction among the vehicles during the mission (for instance, to avoid repeated sampling or exploration at the same location by different vehicles), to strict formation control, the strongest form of cooperation.
There are a number of advantages in considering a team of small AUVs for specific operations instead of a single, large, more powerful AUV: the team will not be affected as a whole by the malfunctioning of a single vehicle, or at least the system performance will degrade gently; scale economies may be gained in vehicle production; launch and recovery issues are less relevant for small vehicles; overall mission time may be minimized, with consequent cost savings. There are also specific missions that can only be pursued by a team, as for instance synoptic sampling of the ocean (i.e. synchronous sampling in time distributed over a spatial domain). The drawback of the team mission is that functionalities have to be designed and implemented at group level: a system design approach has to be pursued.
Fig. 9: Folaga vehicle, latest version, with a mid-vehicle payload module carrying a CTD probe and an acoustic modem. The vehicle has approx. 1.80 m length and 30 kg weight without payload
-
430
The last five-six years have seen a rise in both theoretical and experimental work on the subject, with a clear domain of application in area mapping, environmental monitoring/surveying, underwater surveillance system. The Monterey Bay series of experiments, Bellingham (2009) have examples of all three cooperation modalities, as well as heterogeneous components (propelled AUVs, gliders, surface platforms, fixed assets as oceanographic buoys or benthic stations, satellite interaction), with various degrees of integration, realizing the AOSN framework envisaged in Curtin et al. (1993). Of particular interest in this context is the work Leonard et al. (2010), in which a formation of oceanographic glider is kept in order to optimize the gradient sampling of an oceanographic front, and the formation itself is adaptively moved along the front as a result of oceanographic model predictions remotely generated thanks to the data fed by the glider formation itself. Cooperative adaptive oceanographic sampling and missions are investigated also in Eickstedt et al. (2006), Alvarez et al. (2007), Munaf et al. (2011).
3. The future
The thread we have chosen to follow in the description of the evolution in marine robotics is that of the autonomy of the systems. Presently, there are autonomous vehicles, commercially available and relied upon by the user communities. We do not have yet, though, widespread user exploitation of autonomous cooperative missions with AUV teams. This reflects the fact that, despite recent successful research experimentation, the field is not mature enough, and research efforts have still to be exerted along this line. As autonomy increases, the need of longer operational hours increases as well; another research front that will play a key role in the future is that of energy efficient vehicles, possibly with renewable energy. Finally, a field that has been left out so far from the autonomy development is that of intervention: underwater manipulators are still tele-operated through ROVs, while in factories, service robotics and space exploration, there are numerous examples of autonomous manipulation tasks. Also this gap will need to be addressed in the near future. In the following, a more detailed discussion on each of these items is offered.
3.1 Team cooperation and the communication challenge
The two first commercial (as well as scientific) successes in the AUV field, the HUGIN and the REMUS, were developed by companies/labs in parallel to acoustic communication and localization systems to be exploited by the vehicles themselves. Autonomy does not exclude, and in fact it may rely on, the possibility to communicate (for instance, with a fixed transponder in order to correct navigation errors). As the field evolves toward cooperative multi-vehicle operations, communication among the vehicles has to be supported. The communication problem now moves from point-to-point communication to networked communication, since we do not expect to have simply a team of two vehicles. The acoustic communication channel is a time-varying, space-varying channel, with strong delays, limited bandwidth, fading and interference caused by multi-path acoustic propagation effects, Stojanovic (2007). These conditions already limit point-to-point communication possibilities, and put even harder constraints in establishing a network infrastructure among the vehicles. Due to the bandwidth limitation (which is a barrier posed by the physics of acoustic propagation, not by our lack of technology), exchange of information has to be kept to a minimum. The cooperative strategies and algorithms have to be designed in order to exploit as much as possible the autonomous decisions of the individual vehicles, and to be robust to communication loss. This prevents the use of cooperative strategies that are very popular in terrestrial or aerial robotics, as all the algorithms based on the consensus approach, Wei et al. (2005), due to the communication overburden implied. Research on underwater acoustic networking is therefore very active and coupled with the cooperation design. A relatively recent review of the state-of-the art is in Pompili and Akyldiz (2009); a more recent experimental example of acoustic communication network with both fixed and mobile sensors, that has continuously run for five days, is reported in Caiti et al. (2012); a cooperative algorithm tailored on the acoustic communication capabilities has been presented in Chen and Pompili (2012); and a vision both from the research and the user community perspective is presented in Been et al. (2010). An important recent development is the consideration of optical (LED, but also green laser)
-
431
communication at short ranges not only for coordination but also to transmit at high rate payload data from vehicles to fixed stations data gatherers (e.g. oceanographic buoys with satellite links), Doniec et al. (2010); following this line, WHOI has patented a dual acoustic/optical modem, that may switch between the two modalities according to the relative range among the vehicles, Farr et al. (2010). Also relative localization of the team members is a problem that can be tackled using inter-vehicle acoustic range measurements, and designing appropriate cooperative behaviors of vehicles: studies and preliminary experimental experiences have been presented for instance in Bahr et al. (2009), Antonelli et al. (2010).
Another aspect at the core of the investigation is that of control & communication oriented software architectures to support the cooperative mission. In this field the MIT group has allowed to make important progresses, starting from the GOATS program experience and following with contributions on adaptive control of heterogeneous vehicles and addressing interoperability issues, Eickstedt et al. (2006), Benjamin et al. (2010), Schneider and Schmidt (2010). In parallel to the advances in the communication section, both experimentation and theoretical work on team coordination and control for both surface and underwater vehicles has progressed with a considerable push from several European Union sponsored projects, Brignone et al. (2009), Almeida et al. (2010), Birk et al. (2011), Bibuli et al. (2012). A global view of a relevant part of the research community has been presented in Das et al. (2011). The expectation is to see many experimental results coming out in the near future; the accumulation of successful experiences at increasing complexity levels will likely allow a fast transfer to the user community of the research achievements.
3.2 Energy efficient autonomy: Toward green vehicles and biomimetic systems?
As the fleet of AUVs increases, and long-term missions are considered, the energy efficiency of the vehicles becomes a key issue. So far progress in endurance has been linked to progress in electrical batteries; new generation batteries, Hyakudome et al. (2011), allow for more energy storage while at the same time reducing size and weight. This allows an increase in mission time even for small lightweight vehicles. However, this is not yet enough to guarantee mission times of more than few days at the very best. Moreover, the increase in functionalities carries over an increase in energy requirements. Acoustic modems do not come cheaply, in terms of energy budget; some payloads (typically acoustic payloads, as for instance side-scan sonars) are also energy-consuming devices. The example of the glider actuation system shows that clever, focused design may allow a much higher jump in efficiency.
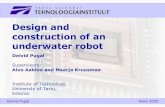
Other energy saving systems have been explored. The group led by Blidberg at AUVSI has pioneered the investigation on solar-powered AUVs, Blidberg et al. (2005), with solar panels accumulating energy when the vehicle is at the surface. The very recent wave-glider vehicle, Frolov et al. (2011), is a surface autonomous vehicle that exploits wave motion to produce a net horizontal movement in the desired direction, Fig.10. The system is complemented with solar panels, and it has the potential of being a movable surface sampling station with unlimited energy autonomy; it already has been applied in environmental/oceanographic application, and it is an example of a specialized vehicle entirely supported by green energy. In March 2012, four months after the start, a group of wave gliders arrived from San Francisco to Hawaii, having travelled 2500 miles across the Pacific ocean (reported by the news site Innovation on msnbc.com).
Nature-inspired design may lead to improved efficiency and reduced consumption. Examples of design criteria and specific realizations are in Yamamoto (2006), Fig.11. Another instance of design aimed at exploiting biomimetic features is the Octopus project, sponsored by the European Union, in which the functionalities of octopus tentacles and propulsion are replicated to obtain a floating vehicle with manipulation capabilities, Laschi et al. (2009). This last instance, though not specifically aimed at consumption reduction, is an example of the potential still to be exploited in underwater robotics design, and nicely links to the last subject of the paper, autonomous manipulation for intervention tasks.
-
432
Fig. 10: The Wave-Glider, produced by Liquid Robotics images from the web site: http://www.msnbc.msn.com/id/46725384/ns/technology_and_science-innovation/#.T2DEMRFbrY9
Fig. 11: Biomimetic design of a flat-fish robot, Yamamoto (2006)
3.3 Autonomous Intervention
In contrast with survey, mapping and sampling applications, underwater intervention robotics has not changed much since the 80s: tasks are still performed by tele-operation through ROVs. However, as dramatically demonstrated in the 2010 Deepwater Horizon oil spill in the Gulf of Mexico, ROVs do not have the necessary ability to perform their tasks with the desired agility and dexterity. The presence of the umbilical cable may constitute an additional hazard and a limit to operability in safe and rescue operation, or in operations on a wreck or on a damaged installation. So, there is a clearly identifiable need for autonomous robots capable of underwater intervention through manipulators. The development of underwater manipulators with great agility, dexterity and soft grasp capabilities was pioneered by the European Union project AMADEUS, Lane et al. (1997). Advances in vehicle-manipulator joint control were reported in Antonelli et al. (2000). The arm design originated by the project AMADEUS was then transferred to the SAUVIM project at the University of Hawaii, Marani et al. (2009), Marani and Choi (2010). SAUVIM is to date the only project able to successfully conduct an experiment at sea proving autonomous manipulation capabilities, Fig.12. While possibly not yet mature for immediate transfer to the industry, SAUVIM shows indeed that autonomous manipulation is not that far away anymore. While progress has been slow so far, there is now promise for faster development, as it has been the situation for AUVs at the end of the 90s. Of particular interest in this context are the work reported in De Novi et al. (2010) and the on-going European Union project TRIDENT, Sainz et al. (2010), which carry the promise of a further advancement in manipulation autonomy and agility. As this goal is reached, cooperative intervention will be the next step.
4. Conclusions
The paper has presented a survey of recent developments in underwater robotics, and on the current hot topic research and technological issues. As any exercise of this kind, this survey may likely reflect the bias of the authors on some specific topic, and, also, space limitation may have prevented some further discussion (for instance, progress in exploration at abyssal depths and the establishment of deep water benthic laboratories have not been touched).
-
433
Fig. 12: From left to right: The SAUVIM AUV for intervention; its robotic arm; the arm as installed in the vehicle. Images from the SAUVIM project site: http://www.eng.hawaii.edu/~asl/Sauvim
At the very least, we hoped to have shown that, though slow, the progress in underwater robotics is catching up with the capabilities of the other robotic fields in producing original, differentiated, designs and systems tailored to the specific application needs, getting closer and closer to the autonomy expected by cognitive systems. Figs.1 to 3 show the diversity now developed in ground and aerial systems. In Figs.6 to 12 we see a similar pattern emerging also in the underwater domain. Underwater robots are well on their way to take part in our every-day lives and activities.
References
ALLEN, B.; STOKEY, R.; AUSTIN, T.; FORRESTER, N.; GOLDSBOROUGH, R.; PURCELL, M.; VON ALT, C. (1997), REMUS: a small, low cost AUV; system description, field trials and performance results, IEEE Oceans97, Halifax
ALMEIDA, J.; SILVESTRE, C.; PASCOAL, A. (2010), Cooperative control of multiple surface vessels in the presence of ocean currents and parametric model uncertainty, Int. J. Robust Nonlinear Control 20/14 pp.15491565
ALVAREZ, A.; CAFFAZ, A.; CAITI A.; CASALINO, G.; GUALDESI, L.; TURETTA, A.; VIVI-ANI, R. (2009), Folaga: a low cost autonomous underwater vehicle combining glider and AUV capabilities, Ocean Engineering 36/1, pp.24-38
ALVAREZ, A.; GARAU, B.; CAITI, A. (2007), Combining networks of drifting profiling floats and gliders for adaptive sampling of the Ocean, IEEE Conf. Robotics and Automation (ICRA), Rome
ALVES, J.; OLIVEIRA, P.; OLIVEIRA, R.; PASCOAL, A.; RUFINO, M.; SEBASTIAO, L.; SILVESTRE, C. (2006), Vehicle and mission control of the DELFIM autonomous surface craft, IEEE 14th Mediterranean Conf. Control Automation, Ancona
ANTONELLI, G. (2003), Underwater Robots, Springer
ANTONELLI, G.; CACCAVALE, F.; CHIAVERINI, S.; VILLANI, L. (2000), Tracking control for underwater vehicle-manipulator systems with velocity estimation, IEEE J. Oceanic Eng. 25/3, pp.399-413
ANTONELLI, G.; CAITI, A.; CALABR, V.; CHIAVERINI, S. (2010). Designing behaviours to improve observability for relative localization of AUVs, IEEE Conf. on Robotics and Automation (ICRA), Anchorage
BAHR, A.; LEONARD, J.J.; FALLON, M.F. (2009), Cooperative localization for autonomous underwater vehicles, Int. J. Robot. Res. 28/6, pp.714728
BASH, J.F. (2008), New ship technology and design, J. Marine Tech. Soc. 42/1, pp.21-25 BELLINGHAM, J.G: (2009), Autonomous ocean sampling network-II (AOSN-II): Integration and
-
434
demonstration of observation and modeling (Final Report), DTIC Report http://oai.dtic.mil/oai/oai?verb=getRecord&metadataPrefix=html&identifier=ADA501315
BELLINGHAM, J.G.; RAJAN, K. (2007), Robotics in remote and hostile environments, Science 318/5853, pp.1098-1102
BELLINGHAM, J.G.; GOUDEY, C.A.; CONSI, T.R.; BALES, J.W.; ATWOOD, D.K.; LEONARD, J.J.; CHRYSSOSTOMIDIS, C. (1994), A second generation survey AUV, IEEE Symp. Autonomous Underwater Vehicle Technology, Cambridge
BENJAMIN, M.R.; SCHMIDT, H.; NEWMAN, P.M.; LEONARD, J.J. (2010), Nested autonomy for unmanned marine vehicles with MOOS-IvP, J. Field Robotics, 27/6, pp.834-875
BEEN, R.; HUGHES, D.T.; POTTER, J.R.; STRODE, C. (2010), Cooperative anti-submarine warfare at NURC moving towards a net-centric capability, IEEE Oceans10, Sidney
BIBULI, M.; CACCIA, M.; LAPIERRE, L.; BRUZZONE, G. (2012), Guidance of unmanned surface vehicles: Experiments in vehicle following, IEEE Robotics and Automation Magazine Digital Object Identifier 10.1109/MRA.2011.2181784.
BIRK, A.; ANTONELLI, G.; CAITI, A.; CASALINO, G.; INDIVERI, G.; PASCOAL, A.; CAFFAZ, A. (2011), The CO^3AUVs (cooperative cognitive control for autonomous underwater vehicles) project: Overview and current progresses, IEEE Oceans11 Conf., Santander
BLIDBERG, D.R. (2001), The development of autonomous underwater vehicles (AUV); A brief summary, Int. Conf. Rob. Autom. (ICRA), Seoul
BLIDBERG,.D.R.; MUPPARAPU, S.; CHAPPELL, S.; KOMERSKA, R.; JALBERT, J.C.; NITZELM R. (2005), The SAUV II (solar powered AUV) test results 2004, IEEE Oceans05, Brest
BOVIO, E.; SCHMIDT, H. (2001), The GOATS joint research project: underwater vehicle networks for acoustic and oceanographic measurements in the littoral ocean. SACLANTCEN Conf., La Spezia, pp.3-16
BRIGNONE, L.; ALVES, J.; OPDERBECKE, J. (2009) GREX sea trials: first experiences in multiple underwater vehicle coordination based on acoustic communication, IEEE Oceans09, Bremen
CACCIA, M. (2006), Autonomous surface craft: Prototypes and basic research issues, IEEE 14th Mediterranean Conf. Control Automation, Ancona
CACCIA, M.; BONO, R.; BRUZZONE, VERUGGIO, G. (2000). Unmanned underwater vehicles for scientific applications and robotics research: The ROMEO project, J. Marine Tech. Soc. 34/2, pp.317
CAITI, A.; CALABRO, V.; DINI, G.; LO DUCA, A.; MUNAFO, A. (2012), Secure cooperation of autonomous mobile sensors using an underwater acoustic network, Sensors, 12/2, pp.1967-1989.
CAITI, A.; GARULLI, A.; LIVIDE, F.; PRATTICHIZZO, D. (2005), Localization of autonomous underwater vehicles by floating acoustic buoys: a set-membership approach, IEEE J. Oceanic Eng. 30/1, pp.140-152
CAFFAZ, A.; CAITI, A.; CASALINO, G.; TURETTA, A. (2010), The Hybrid Glider/AUV Flaga, IEEE Robotics and Automation Magazine, 17/1, pp.31-44 CHANCE, T.S.; KLEINER, A.A. NORTHCUT, J.G. (2000), The autonomous underwater vehicle
-
435
(AUV): A cost-effective alternative to deep-towed technology, Integrated Coastal Zone Management: Strategies and Tools, ICG Publishing, London, pp.65-69
CHEN, B.; POMPILI, D. (2012), Team formation and steering algorithms for underwater gliders using acoustic communication, Computer Communications DOI: dx.doi.org/10.1016/j.comcom.2012.01.001
CHRIST, R.D.; WERNLI, R.D. (2007), The ROV manual: a user guide for observation class remotely operated vehicles, Butterworth & Heinemann, Oxford
COHAN, S. (2008), Trends in ROV development, J. Marine Tech. Soc. 42/1, pp.38-43
CONTE, G.; ZANOLI, S.M.; SCARADOZZI, D.; CAITI, A. (2009), Robotics techniques for under-water archaeology, Int. J. Mechanics and Control 10/1, pp.45-51
CURTIN T, BELLINGHAM J, CAPITOVIC J, WEBB D (1993), Autonomous oceanographic sampling networks, Oceanography 6/3, pp.8694
DAS, J.; MAUGHAN, T.; MCCANN, M.; GODIN, M.; O'REILLY, T.; MESSIE, M.; BAHR, F.; GOMES, K.; PY, F.; BELLINGHAM, J.G.; SUKHATME, G.S.; RAJAN, K. (2011), Towards mixed-initiative, multi-robot field experiments: Design, deployment, and lessons learned, IEEE Conf. Intelligent Robots and Systems (IROS), San Francisco
DE NOVI, G.; MELCHIORRI, C.; GARCA, J.C.; SANZ, P.J.; RIDAO, P.; OLIVER, G. (2010), A new approach for a reconfigurable autonomous underwater vehicle for intervention, IEEE Aerospace and Electronic Systems Magazine 25/11, pp.32-36
DONIEC, M.; DETWEILER, C.; VASILESCU, I.; RUS, D. (2010), Using optical communication for remote underwater robot operation, IEEE Conf. Intelligent Robot and Systems (IROS), Taipei
EICKSTEDT, D.P.; BENJAMIN, M.R.; SCHMIDT, H.; LEONARD, J.J. (2006), Adaptive control in heterogeneous marine sensor platforms in an autonomous sensor network, IEEE. Conf. Intelligent Robots and Systems (IROS), Beijing
FARR, N.; BOWEN, A.; WARE, J.; PONTBRIAND, C.; TIVEY, M. (2010), An integrated underwater optical/acoustic communication system, IEEE Conf. Oceans'2010, Sydney
FOSSEN, T. (1994), Marine Control Systems, Marine Cybernetics, Trondheim
FREITAG, L.; GRUND, M.; SINGH, S. PARTAN, J.; KOSKI, P.; BALL, K. (2005), The WHOI micro-modem: an acoustic communications and navigation system for multiple platforms, IEEE Conf. Oceans05, Washington
FROLOV, S.; BELLINGHAM, J.; ANDERSON, W.; HINE, G (2011), Wave Glider - A platform for persistent monitoring of algal blooms, IEEE Oceans11, Kona
GHABCHELOO, R.; AGUIAR, A.P.; PASCOAL, A.; SILVESTRE, C.; KAMINER, I.; HESPANHA, J. (2009), Coordinated path following in the presence of communication losses and time delays, SIAM J. Control Opt. 48/1, pp.234265
HAGEN, P.E.; STORKERSEN, N.J.; VESTGARD, K. (1999), HUGIN-use of UUV technology in marine applications, IEEE OCEANS99 Conf., Seattle, pp. 967972
HOLLINGS, B.; PATTIARATCHI, C.B.; WOO, M.; HANSON, C.E. (2010), Sustained oceanographic observations around Australia using autonomous Ocean Gliders, IEEE Oceans10
-
436
Conf., Sydney
HYAKUDOME, T.; YOSHIDA, H.; ISHIBASHI, S.; SAWA, T.; NAKAMURA, M.; (2011), Development of advanced Lithium-ion battery for underwater vehicle, IEEE Underwater Technology Symp.; Tokyo
LEONARD, N.E.; PALEY, D.A, DAVIS R.E.; FRATANTONI, D.M.; LEKIEN, F.; ZHANG, F. (2010), Coordinated control of an underwater glider fleet in an adaptive ocean sampling field experiment in Monterey Bay. Int J. Field Robotics 27/6, pp.718740
LANE D. M.; O'BRIEN D. J.; PICKETT M.; DAVIES J. B. C.; ROBINSON G. , JONES D.; SCOTT E.; CASALINO G.; BARTOLINI G.; CANNATA G. , FERRARA A.; ANGELETTI D.; VERUGGIO G.; BONO R.; VIRGILI P.; CANALS M.; PALLAS R.; GRACIA E.; SMITH C. (1997), AMADEUS: Advanced manipulation for deep underwater sampling, IEEE Robotics and Automation Magazine 4/4, pp.34-45
LASCHI, C.; MAZZOLAI, B.; MATTOLI, V.; CIANCHETTI, P.; DARIO P. (2009) Design of a biomimetic robotic octopus arm, Bioinspiration and Biomimetics 4/1 DOI:/10.1088/1748-3182/4/1/015006.
LEONESSA, A.; J. MANDELLO, J.; MOREL, Y.; VIDAL, M. (2003), Design of a small, multi-purpose, autonomous surface vessel, IEEE OCEANS03 Conf., San Diego
MARANI, G.; CHOI, S.K. (2010), Underwater target localization, IEEE Robotics and Automation Magazine, 17/1, pp.64-70
MARANI, G.; CHOI, S.K.; YUH, J. (2009) Underwater autonomous manipulation for intervention missions AUVs, Ocean Eng. 36/1, pp.15-23
MARCO, D.B.; HEALEY, A.J. (2001), Command, control, and navigation experimental results with the NPS ARIES AUV, IEEE J. Oceanic Eng. 26/4, pp.466-476
MIES, G. (2010), Military robots of the present and the future, AARMS 9/1, pp.125-137
MORAN, B.A.; GRIEVE, R.; SCHMIDT, H. (1999), GOATS 98-AUV network sonar concepts for shallow water mine countermeasures, 11th Int. Symp.Unmanned Untethered Submersible Tech., Durham
MUNAFO, A.; SIMETTI, E.; TURETTA, A.; CAITI, A.; CASALINO, G. (2011), Autonomous underwater vehicle teams for adaptive ocean sampling: a data-driven approach, Ocean Dynamics 61/11, pp.1981-1994
NICHOLSON, J.W.; HEALEY, A.J. (2008), The present state of autonomous underwater vehicle (AUV) applications and technologies, J. Marine Tech. Soc. 42/1, pp.44-51
PASCOAL, A.; OLIVEIRA, P.; SILVESTRE, C.; BJERRUM, A.; ISHOY, A.; PIGNON, J.-P.; AYELA, G.; PETZELT, C. (1997), MARIUS: an autonomous underwater vehicle for coastal oceanography, IEEE Robotics and Automation Magazine 4/4, pp.46-59
POMPILI, D.; AKYLDIZ, I. (2009), Overview of networking protocols for underwater wireless communications, IEEE Communications Magazine 47/1
SANZ, P.J.; RIDAO, P.; OLIVER, G.; MELCHIORRI, C.; CASALINO, G.; SILVESTRE, C.; PETILLOT, Y.; TURETTA, A. (2010), TRIDENT: A framework for autonomous underwater intervention missions with dexterous manipulation capabilities, 7th IFAC Symp. Intelligent
-
437
Autonomous Vehicles, Lecce
SCHNEIDER, T.; SCHMIDT, H. (2010), Unified command and control for heterogeneous marine sensing networks, J. Field Robotics 27/6, pp. 876889
STOJANOVIC, M. (2007), On the relationship between capacity and distance in an underwater acoustic communication channel, ACM SIGMOBILE Mobile Computing and Communications Review (MC2R) 11/4, pp.3443
STOKEY, R.; AUSTIN, T.; ALLEN, B.; FORRESTER, N.; GIFFORD, E.; GOLDSBOROUGH, R.; PACKARD, G.; PURCELL, M.; VON ALT, C. (2001), Very shallow water mine countermeasures using the REMUS AUV: a practical approach yielding accurate results, IEEE Conf. Oceans01, Honolulu
URA, T. (2000), Establishment of underwater technology research center at the institute of industrial science of the university of Tokyo and its activities on AUV development, IEEE Int. Sym. Underwater Technology UT00, Tokyo
WEBB, D.C.; SIMONETTI, P.J.; JONES, C.P. (2001), SLOCUM: an underwater glider propelled by environmental energy, IEEE J. Oceanic Eng. 26/4, pp.447-452
WEI R.; BEARD, R.W.; ATKINS, E.M. (2005), A survey of consensus problems in multi-agent coordination, American Control Conf.; Portland
WOODS, A.; DOCHERTY, T.; KOCH, R. (1994), Experiences of using stereoscopic video with an underwater remotely operated vehicle, Underwater Interventions94, San Diego
YAMAMOTO, I. (2006), Research and development of past, present, and future AUV technologies, Masterclass in AUV Technology for Polar Science, National Oceanography Centre, Southampton http://www.noc.soton.ac.uk/CASEE/CASEE2/
YUH, J. (2000), Design and control of autonomous underwater robots: A survey, Autonom. Robots 8/1, pp.724.
YUH, J.; NEGAHDARIPOUR, S. (1994), Report of the workshop on future research directions on underwater robotics, Maui