Undergraduate Robotics at Roger Williams University
20
Undergraduate Robotics Undergraduate Robotics at at Roger Williams Roger Williams University University Matthew Stein Roger Williams Unversity
-
Upload
joseph-atkinson -
Category
Documents
-
view
33 -
download
1
description
Undergraduate Robotics at Roger Williams University. Matthew Stein Roger Williams Unversity. Never Heard of it?. Just 20 minutes south. Undergraduate Institution. B.S. General Engineering. One elective course in Robotics. Employ 1-2 students on internally funded Research projects. - PowerPoint PPT Presentation
Transcript of Undergraduate Robotics at Roger Williams University
Undergraduate Robotics Undergraduate Robotics atat
Roger Williams UniversityRoger Williams University
Matthew SteinRoger Williams Unversity
Never Heard of it?
Just 20 minutes south
Undergraduate Institution
B.S. General Engineering
One elective course in Robotics
Employ 1-2 students on internally fundedResearch projects

The Robotics Class
3 CreditsSr/Jr engineers and computer
scientists21 Students Fall 2006Entertaining video

Research projects?Like What?PumaPaint 1998-2008
50,000 users - thousands of paintings
Allows user to perform 2D taskLimited to a plane ( canvas)Internet surfers control robot through
a graphical user interface.Limited to simple camera feedback
Most Recent Project
J.P Brice2008 GraduateOn to U. of UtahSlides from his ASME DETC
presentation
Matthew Stein

Objective
3D manipulationLet users manipulate object instead of
drawing on a canvas
Provide more information to the user.
Provide touch feedback True haptic feedback using a force
feedback controller or sensory substitution through a GUI
Matthew Stein

iHandsRobotic hand that let internet users
manipulate objectsPlatform mounted on a linear stage
with 1 foot of displacementTwo pair of fingers
Sensors provide touch feedback
A pneumatic thumb
Hardware and circuitry controlled by Galil Inc. DMC motion controllerOnline 24x7: http://ihands.rwu.edu

Right now

Fingers
Provide touch feedbackSkin over skeletonSensors to detect touching.
Reproduce open-close motion of actual finger
Lead screw linear actuator 12V dc motor
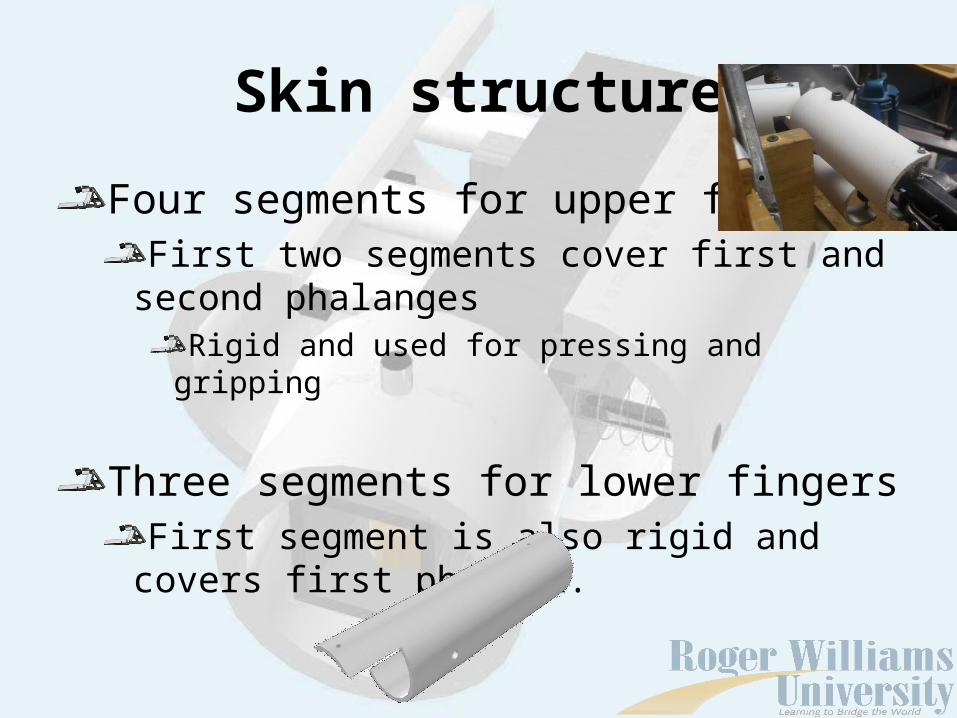
Skin structure
Four segments for upper fingerFirst two segments cover first and
second phalangesRigid and used for pressing and gripping
Three segments for lower fingersFirst segment is also rigid and covers
first phalanx.
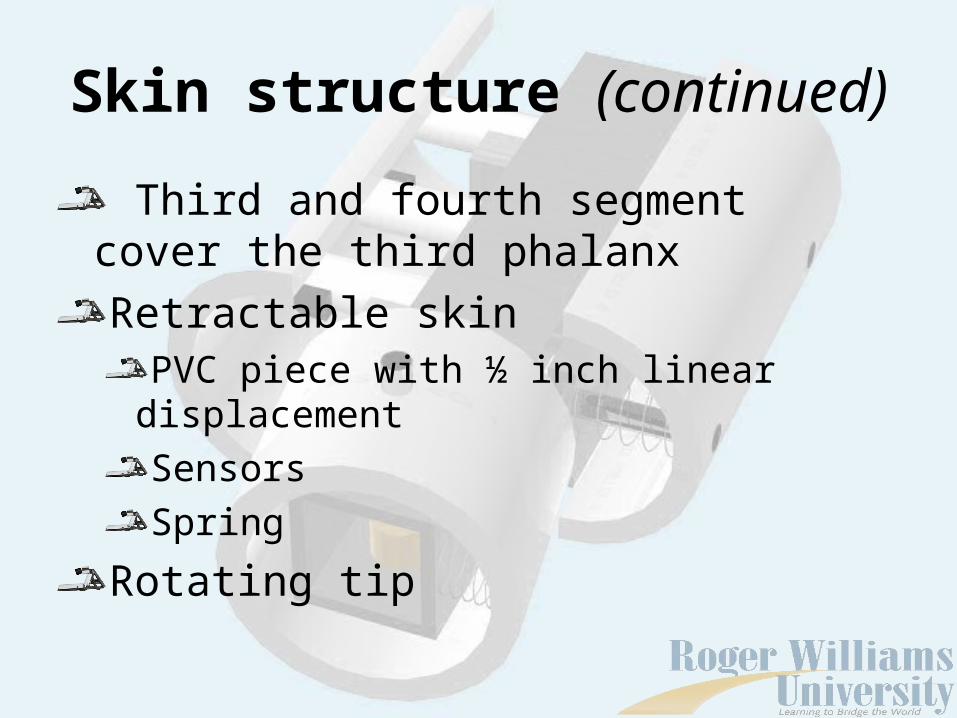
Skin structure (continued)
Third and fourth segment cover the third phalanxRetractable skin
PVC piece with ½ inch linear displacementSensorsSpring
Rotating tip

Third Phalanx
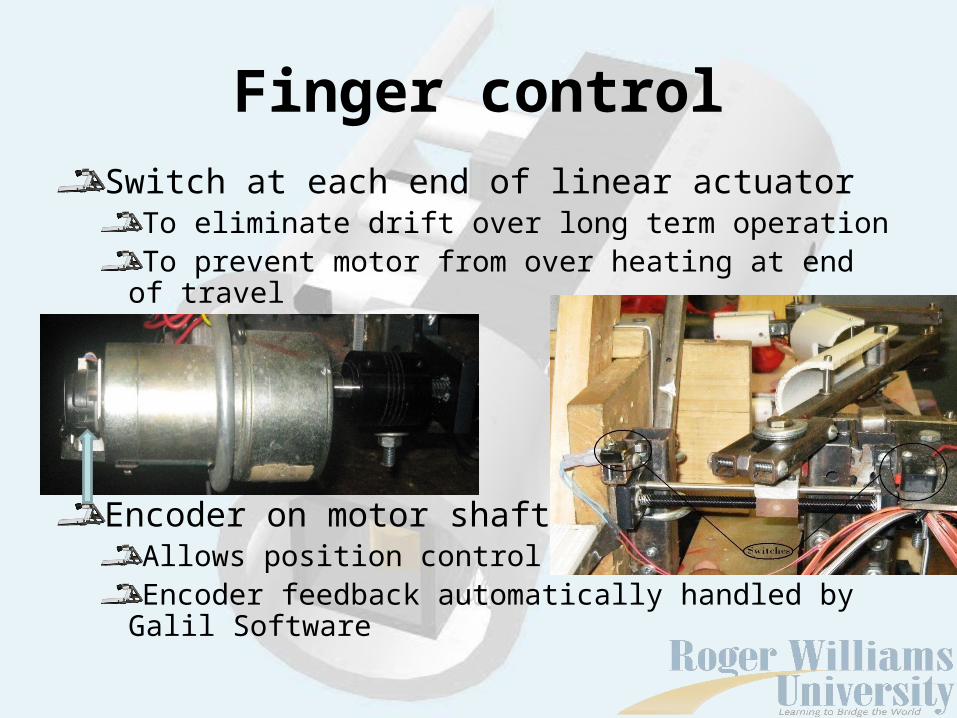
Finger controlSwitch at each end of linear actuator
To eliminate drift over long term operationTo prevent motor from over heating at end of
travel
Encoder on motor shaft Allows position controlEncoder feedback automatically handled by
Galil Software

Motor control
Use of motor command signal from DMC panelLinear transistor circuit to amplify
signal current from 3mA.

Finger motion

Sensory Substitution
Detect contactSkin retracts and obstruct optical sensorOp amp circuit to decide when touching or not
Display contact through graphical user interface
Red arrows are displayed on the GUI

Thumb Design
3 state opposable thumbPneumatic actuator moves thumb up
and downTransistor circuit control valveOutput port on DMC panel used to
activate thumbAll the way upAll the way downTouching and applying quick pressure

Drawings of Thumb

The Graphical User Interface
Conclusion / future work
Users have manipulated balloons and clay
Slow access ( about 2 users per day)
System is robust. Operated without need to reset for six monthsGUI an interesting research issue