Ultrafast ranging lidar based on real-time Fourier transformation
3
Click here to load reader
Transcript of Ultrafast ranging lidar based on real-time Fourier transformation

2108 OPTICS LETTERS / Vol. 34, No. 14 / July 15, 2009
Ultrafast ranging lidar based on real-timeFourier transformation
Haiyun Xia* and Chunxi ZhangSchool of Instrument Science and Opto-Electronics Engineering, Beihang University, Beijing 100083, China
*Corresponding author: [email protected]
Received May 14, 2009; accepted May 26, 2009;posted June 10, 2009 (Doc. ID 111100); published July 7, 2009
Real-time Fourier-transformation-based ranging lidar using a mode-locked femtosecond fiber laser is dem-onstrated. The object signal and the reference signal are guided from a fiber Mach–Zehnder interferometerinto a dispersive element. The two optical pulses extend and overlap with each other temporally, whichyields a microwave pulse on the photodetector with its frequency proportional to the time delay between thetwo signals. The temporal interferograms are transformed from the time domain into the frequency domainusing a time-to-frequency conversion function obtained in the calibration process. The Fourier transform isused in the data processing. A range resolution of 334 nm at a sampling rate of 48.6 MHz over a distance of16 cm is demonstrated in the laboratory. © 2009 Optical Society of America
OCIS codes: 120.0280, 120.3180, 140.4050, 140.3510, 280.3400, 320.7160.
Since the laser was invented, intensive research hasbeen focused on its implementation in ranging andDoppler lidars based on either coherent or incoherenttechniques [1,2]. Recently, optical ranging based onfemtosecond laser became attractive for its inherentadvantages, at least, as illustrated in the followingfour points. First, a mode-locked femtosecond lasercould provide a large number of stable longitudinalmodes with a narrow linewidth and uniform modespacing [3]. The narrow linewidth of each longitudi-nal mode provides high resolution, while the select-able intermode beat-frequency ensures absoluteranging without ambiguity. Minoshima and Matsu-moto reported a resolution of 50 �m by measuringthe phase shift of a series of intermode beats basedon a phasemeter [4]. Second, the repetition frequencyof the mode-locked femtosecond lasers could be syn-chronized to an accurate microwave or rf clock di-rectly. Also, the carrier-envelope phase slippage be-tween successive pulses could be eliminated by usinga self-referencing control technique [5,6]. Such char-acteristics extend the measurement to a coherenttime of several seconds. Ye proposed to combine thetime-of-flight technique and the fringe-resolved inter-ferometry to achieve an absolute ranging over a longdistance [7]. Third, a femtosecond laser generally hasa spectral width broader than several nanometers. Itis a good substitute for the traditional light source ina spectrally resolved white-light interferometry.Thus, Joo and Kim demonstrated a range resolutionof 7 nm over a distance of 0.89 m [8]. Fourth, theworking wavelength around 1.5 �m is compatiblewith the broad gain spectrum of the erbium-doped fi-ber amplifier (EDFA), which could be used to improvethe signal-to-noise ratio in the optical receiver.Swann and Newbury reported a Doppler resolution of0.12 m/s and a range resolution of 60 �m [9].
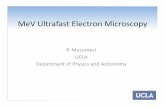
A temporal interferometric ranging lidar is pro-posed and demonstrated in this Letter. The sche-matic of the system is shown in Fig. 1. The opticalsource is a passively mode-locked femtosecond fiber
laser (IMRA Femtolite 780 Model B-4-FC-PD), which0146-9592/09/142108-3/$15.00 ©
emits a train of pulses with a pulse width of 394 fs(FWHM) and a center frequency of 192.31 THz at arepetition rate of 48.6 MHz. In the sensor module,the distance to be measured is incorporated into onearm of a fiber Mach–Zehnder interferometer (MZI) byusing an optical fiber circulator and a fiber collima-tor. On the other arm of the MZI, an optical time de-layer is used to change the time delay difference be-tween the reference and the object signals. Toperform a temporal interference, an in-line polarizeris added at the output end of the MZI. To achieve alargest fringe visibility in the interferogram, polar-ization controllers PC1 and PC2 are used to modulatethe transmission of the two signals through the po-larizer. A cooperative target (a reflecting mirror) ismounted on a nanopositioning stage (PI ModelP-752.1CD) driven by a piezoelectric tube controller(PI Model E-665.CR). The nanopositioning systemworks in a servocontrol mode, which produces an ac-curacy of 0.2 nm. In the optical receivertwo coils of dispersion-compensating fibers(DCFs)—DCF1 and DCF2—are used in cascade tostretch the femtosecond pulses sufficiently in thetime domain. The optical pulses are amplified by
Fig. 1. (Color online) System layout. FSFL, femtosecondfiber laser; C, optical coupler; PC, polarization controller;
PZT, piezoelectric tube; PD, photodetector.2009 Optical Society of America

July 15, 2009 / Vol. 34, No. 14 / OPTICS LETTERS 2109
EDFA1 and EDFA2 to guarantee the signal-to-noiseratio. The temporal interferogram and spectral inter-ferogram are recorded using an oscillator (OSC) andan optical spectrum analyzer (OSA), respectively.
The chromatic dispersion in single-mode fibers hasbeen proposed to implement a real-time dispersiveFourier transform [10]. If the femtosecond pulses andthe DCF meet the condition �T0
2 /�2L��1, where T0 isthe pulse width of the femtosecond pulse, �2 and Lare the group-velocity dispersion (GVD) parameterand the total length of the DCF, and with the neglectof the higher-order dispersion, the temporal pulsepassing through the DCF is a temporal analog of thespatial Fraunhofer diffraction [11],
a1�t� � exp�jt2/2�2L�A0�t/�2L�, �1�
where A0���= �A0����exp�i�0���� is the complex spec-trum of the femtosecond pulse guided into the DCF.I0���= �A0����2 and �0��� are the spectral intensityand the phase of the pulse, respectively. So, the out-put information-bearing signal is proportional to theFourier transform of the input information-bearingsignal, with an angular frequency given by �= t /�2L.
For simplicity, the signals from the two arms of theMZI are supposed to be intensity equalized afterpassing through the polarizer. Thus, the impulse re-sponse of the sensor module is
h�t� = ���t� + ��t + ���/2, �2�
where � is the time-delay difference between the twoarms of the MZI. The electrical field of the signal ar-riving at the photodetector can be expressed as a con-volution a2�t�= a1�t��h�t�. So, the output electric cur-rent is
i�t� = Ra2�t� · a2��t� = 1
4R��A0����2 + �A0�� + ���2
+ 2�A0�����A0�� + ���cos��� + �������=t/�2L,
�3�
where R is the responsivity of the photodetector, a2��t�
is the conjugate of a2�t�, �=� /�2L, and ����=����−���+��. The pulses generated directly fromthe passively mode-locked femtosecond fiber laser arenearly transform limited, i.e., �����0. And if � issmall enough, Eq. (3) can be approximated by
i�t� = RI0�t/�2L��1 + cos��t/�2L��/2. �4�
In the frequency domain, the transfer function of thesensor module is �1+cos����� /2. The spectral inter-ferogram recorded on the OSA is the product of thepulse spectrum and the transfer function
I��� = RI0����1 + cos�����/2. �5�
From Eqs. (4) and (5), one can see that, by recordingeither the temporal interferogram or the spectral in-terferogram, � can be retrieved.
Thanks to the high repetition rate of the femtosec-ond fiber laser, we perform a single-shot range detec-tion based on the temporal interferogram. Under the
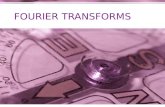
effect of the third-order dispersion of the entire sys-tem and the unbalanced dispersion between the twoarms of the MZI, the frequency of the temporal inter-ferogram would change linearly with time. A detaileddemonstration of this phenomenon is beyond thescope of this Letter. To calibrate the system, we scanthe optical delayer in the reference arm until a tem-poral interferogram at a frequency of about 1 GHz isobserved. The temporal interferogram and the spec-tral interferogram are recorded and shown along theabscissa and the ordinate, respectively, in Fig. 2. Thepeak centers of the two interferometric patterns arefound using a single-peak fitting algorithm. To com-pensate the effect of the third-order dispersion andunbalanced dispersion in the MZI, a polynomial fit-ting function up to the second order, which relatesthe peak centers of the two patterns, is obtained,
f = 192.423 + 0.1293t + 1.958 10−4t2, �6�
where the units of frequency and time are terahertzand nanoseconds, respectively.
We performed a relative displacement measure-ment in the following experiment. The distance fromthe collimator to the reflecting mirror is about 16 cm.The dynamic range is determined by the bandwidthof the oscilloscope (Tektronix Model TDS7704B, 7GHz bandwidth), since the photodetector has ahigher bandwidth (New Focus Model 1014, 45 GHzbandwidth). The temporal interferogram has a periodof about Ti=2��2L /�. Given the dispersion DL=−960 ps/nm, the center wavelength �=1559 nm,and with the relation D=−2�c�2 /�2, to satisfy the in-equation 1/Ti fb �fb=7 GHz� one can obtain � 54.4 ps. So the dynamic range is 8.17 mm. It isclear that, given a limited bandwidth of the receiver,the higher the dispersion DL, the larger the dynamicrange. However, the stretched pulses should not over-lap.
To initialize the system, we scan the optical delayeruntil a temporal interferogram with a frequency ofabout 3.5 GHz is detected. For a relative distancemeasurement, this position is set as the zero point.The frequency of the temporal interferogram is pro-portional to the time-delay difference linearly, so
Fig. 2. (Color online) Time-to-frequency conversion
function.
2110 OPTICS LETTERS / Vol. 34, No. 14 / July 15, 2009
there is no ambiguity problem. We set the nanoposi-tioning stage to nine different positions and recordthe temporal interferogram ten times at each posi-tion without averaging. The temporal interferogramsrecorded at the first position are shown in Fig. 3(a).After the data acquisition, each temporal interfero-gram is aligned to the center of the carrier envelopeand transformed from the time domain to the fre-quency domain using Eq. (6), then rescaled by usingspline interpolation and resampling, followed by aninverse Fourier transformation. The final results areshown in Fig. 3(b). The main sideband is associatedwith the time-delay difference. Some minor side-bands are also observed, which may be associatedwith the backscattering of fiber connectors and thecross talk of the optical circulator used in the system.Since the envelope of the femtosecond pulse has aGaussian shape, we fit each of the main sidebands toa Gaussian function with the center of each fitting re-sult equal to the time delay difference. Finally, therelative displacement of the mirror can be calculated.The result is shown in Fig. 4. A standard deviation of334 nm and a mean error of 85 nm are estimatedfrom the 90 measurements.
Here, we demonstrated that the real-time Fouriertransformation in an element that provides highGVD can be used to achieve an ultrafast range mea-surement. This method inherits the advantages fromthe accuracy of fringe encoding in both temporal andspectral interferometry techniques and from the re-sistance to noise in the Fourier processing. Attrac-
Fig. 3. (Color online) (a) Temporal interferograms re-corded at the zero point, (b) inverse Fourier transform re-sults shown on a logarithmic scale. Inset, partial view ofthe main sideband shown on a linear scale.
tively, the range information is encoded into the fre-quency of the generated microwave pulses. Thus,microwave techniques could be used to analyze thereceived signal instead of recording and processingthe signal directly. Additionally, the all-fiber systemshows high potential for integration. Although thedynamic range of this technique is small, we believethat it can be incorporated with other ranging tech-niques described at the beginning of this Letter toachieve a long distance measurement.
The authors are grateful to Jianping Yao for hissupport in the experiments, and to the reviewers fortheir constructive comments. H. Xia is supported bythe China Scholarship Council.
References
1. R. M. Huffaker and R. M. Hardesty, Proc. IEEE 84,181 (1996).
2. H. Xia, D. Sun, Y. Yang, F. Shen, J. Dong, and T.Kobayashi, Appl. Opt. 46, 7120 (2007).
3. W. C. Swann, J. J. McFerran, I. Coddington, N. R.Newbury, I. Hartl, M. E. Fermann, P. S. Westbrook, J.W. Nicholson, K. S. Feder, C. Langrock, and M. M.Fejer, Opt. Lett. 31, 3046 (2006).
4. K. Minoshima and H. Matsumoto, Appl. Opt. 39, 5512(2000).
5. D. J. Jones, S. A. Diddams, J. K. Ranka, A. Stentz, R.S. Windeler, J. L. Hall, and S. T. Cundiff, Science 288,635 (2000).
6. J. J. McFerran, W. C. Swann, B. R. Washburn, and N.R. Newbury, Opt. Lett. 31, 1997 (2006).
7. J. Ye, Opt. Lett. 29, 1153 (2004).8. K.-N. Joo and S.-W. Kim, Opt. Express 14, 5954 (2006).9. W. C. Swann and N. R. Newbury, Opt. Lett. 31, 826
(2006).10. T. Jannson, Opt. Lett. 8, 232 (1983).11. A. Papoulis, J. Opt. Soc. Am. A 11, 3 (1994).
Fig. 4. (Color online) Comparison between the preset po-sitions and the measurements. Data are shown in the for-mat of (standard deviation, mean error).