Two-Mass, Three-Spring Dynamic System Investigation Case...
43
Mechatronics Two-Mass, Three-Spring Dynamic System K. Craig 1 Two-Mass, Three-Spring Dynamic System Investigation Case Study
Transcript of Two-Mass, Three-Spring Dynamic System Investigation Case...

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig1
Two-Mass, Three-SpringDynamic System Investigation
Case Study

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig2
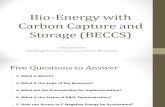
Physical System Physical Model MathematicalModel
ModelParameter
Identification
ActualDynamicBehavior
ComparePredictedDynamicBehavior
MakeDesign
Decisions
DesignComplete
Measurements,Calculations,
Manufacturer's Specifications
Assumptionsand
Engineering Judgement
Physical Laws
ExperimentalAnalysis
Equation Solution:Analytical and Numerical
Solution
Model Adequate,Performance Adequate
Model Adequate,Performance Inadequate
Modify or
Augment
Model Inadequate:Modify
Dynamic System Investigation
Which Parameters to Identify?What Tests to Perform?

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig3
Objective
• The objective was to design, build, and demonstrate a dynamic system that:– Would demonstrate dynamic system behavior
below, at, and above a system resonance– Would demonstrate the physical significance of
transfer function poles and zeros– Would show clearly the relationship between the
time domain and frequency domain– Would show the difference between collocated and
non-collocated control systems

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig4
Physical System Picture

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig5
Physical System Schematic
M1 M2
Infrared PositionSensor
Rack and Pinion
Motor withEncoder
Springs
Linear Bearings
Infrared PositionSensor
Connecting Bar
Guideway
Two-Mass Three-Spring Dynamic System

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig6
Physical System Components
• Translating masses (2)• Tension springs (3)• Linear bearings (3) and guide-way• Rack and pinion gear system• Infrared position sensors (2)• Permanent magnet brushed DC motor with
optical encoder• PWM servoamp and power supply

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig7
Physical Model Assumptions
• Springs– three tension springs are identical– linear springs– neglect mass of springs– neglect structural damping in springs– constant spring rate– springs are always in tension

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig8
Physical Model Assumptions
• Masses– two masses are rigid bodies– one degree of freedom (translation) for each mass– neglect air damping on masses– Coulomb friction and viscous damping in linear
bearings supporting masses and rack– Coulomb friction: independent of position and
velocity– Viscous damping: coefficient is constant

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig9
Physical Model Assumptions
• Structure– rigid and fixed– independent of system motions– straight track– level track (gravity acts perpendicular to track)

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig10
Physical Model Assumptions
• Rack and Pinion Gear System– neglect elasticity of gear teeth– neglect backlash of gear teeth– neglect friction of gear teeth– rigid connection to motor shaft and to translating
mass

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig11
Physical Model Assumptions
• Motor / Amplifier– PWM servoamp operates in current mode– neglect amplifier dynamics– Coulomb friction and viscous damping in motor– Coulomb friction: independent of angular position
and angular velocity– Viscous damping: coefficient is constant

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig12
Physical Model Assumptions
• Sensors– Optical encoder: 2000 counts per revolution with
quadrature decoding– Analog infrared position sensor
• time constant: 2.5 ms• range: 0.9 m• output: 0 to 10 V

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig13
Diagram of Physical Model
M1 M2
K K K
Two-Mass Three-Spring Dynamic SystemPhysical Model
X1 X2
θ rp
Jmotor BmotorTfriction Jpinion
Tm
B1 Ff1 B2 Ff2

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig14
Model Parameter Identification
J m rp p p≈12
2
• Translating Masses– m1 = 1.6725 kg (includes mass of rack)– m2 = 1.275 kg
• Pinion Gear– rp = 0.0127 m– mp = 0.0092 kg
• Infrared Position Sensors– Calibration Curves

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig15
Model Parameter Identification
0 1 2 3 4 5 6 7 8 9 10-80
-60
-40
-20
0
20
40
60
80
100Sensor II X2(mm)= -0.286*V13+2.6671*V12-21.2174*V1+125.0637
Sensor Volts
Pos
ition
(mm
), "
+" w
hen
mov
es a
way
from
the
mot
or
Sensor I (near the motor) Sensor II
( )

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig16
Model Parameter Identification
• Motor– Jm = 0.0078 oz-in-s2 = 5.5080E-5 kg-m2
– Bm = 0.20 oz-in/krpm = 1.3487E-5 N-m-s– Tf m = 0.19 in-lb = 0.0215 N-m– Kt = 11.8 oz-in/A = 8.3326E-2 N-m/A
• Springs– K = 494 N/m
• PWM Servo-Amplifier– Ka = 1 A/V

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig17
Model Parameter Identification
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50.04
0.045
0.05
0.055
0.06
0.065
Time(sec)
Ampl
itude
(m)
Mx Bx Kx
nx
x
B m
n
n
ln
+ + =
=FHGIKJ
=+
=
+
2 0
1
22
1
1
2 2
δ
ζδ
π δ
ζω
a f
• Friction in System– Mass M1– Viscous Damping– B = 1.8 N-s/m
Approximate Exponential Decay

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig18
Model Parameter Identification
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
Time(sec)
Ampl
itude
(m)
Mx Bx Kx
nx
x
B m
n
n
ln
+ + =
=FHGIKJ
=+
=
+
2 0
1
22
1
1
2 2
δ
ζδ
π δ
ζω
a f
Approximate Exponential Decay• Friction in System– Mass M2– Viscous Damping– B = 1.8 N-m/s

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig19
Model Parameter Identification
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
t
Ampl
itude
(m)
Approximate Linear Decay
• Friction in System– Mass M1 + Rack/Pinion + Motor– Coulomb Damping– Ff1-eff = 2.4 N
Mx Kx F
F Kf
f
+ =
=
22
4∆

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig20
Mathematical Model: FBD’s
T K i K K Vm t t a in= =
+θ
Fc
J Tθ
rp
Bmθ
Tf sgn θb g
o
Motor Rotor + Pinion
J J JT motor pinion= +
J B T K K V F rT m f t a in c psgnθ θ θ+ + = −b gMo∑ = 0

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig21
Mathematical Model: FBD’s
x1
M1
M x1 1Fstatic Fstatic
Fc
Kx1K x x2 1−a f
B x1 1
F xf1 1sgna f
Mass M1
M x B x Kx Kx F F xc f1 1 1 1 1 2 1 12 sgn+ + = + − a fFx∑ = 0

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig22
Mathematical Model: FBD’s
x2
M2
M x2 2Fstatic Fstatic
K x x2 1−a f −Kx2
B x2 2
F xf 2 2sgna f
Mass M2
M x B x Kx Kx F xf2 2 2 2 2 1 2 22 sgn+ + = − a fFx∑ = 0

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig23
Mathematical Model:Equations of Motion
J B T K K V F rT m f t a in c psgnθ θ θ+ + = −b g [1]
M x B x Kx Kx F F xc f1 1 1 1 1 2 1 12 sgn+ + = + − a f [2]
M x B x Kx Kx F xf2 2 2 2 2 1 2 22 sgn+ + = − a f [3]
x r
x r
x r
p
p
p
1
1
1
=
=
=
θ
θ
θ
Kinematic Relations:

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig24
Mathematical Model:Equations of Motion
Solve for Fc in equation [1] using the kinematic relations:
F J xr
B xr
Tr
K Kr
Vc Tp
mp
f
p
t a
pin= − − − +
sgn12
12
θb g
Substitute this expression into equation [2]:
M Jr
x B Br
x Kx
Kx F xT x
rK K
rV
T
p
m
p
ff
p
t a
pin
1 2 1 1 2 1 1
2 1 11
2+LNM
OQP
+ +LNM
OQP
+
= − − +sgnsgn
a f a f

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig25
Mathematical Model:Equations of Motion Summary
M x B x Kx Kx F xf2 2 2 2 2 1 2 22 sgn+ + = − a fM x B x Kx Kx F x K K
rVeff eff f eff
t a
pin1 1 1 1 1 2 1 12− − −+ + = − +sgna f
M M Jr
B B Br
F F Tr
effT
p
effm
p
f eff ff
p
1 1 2
1 1 2
1 1
−
−
−
= +
= +
= +

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig26
Mathematical Model:Linear Model
M x B x Kx Kx K Kr
Veff efft a
pin1 1 1 1 1 22− −+ + = +
M x B x Kx Kx2 2 2 2 2 12+ + =
Laplace Transform:
M s B s K KK M s B s K
X sX s
K Kr Veff efft a
p in1
21
22
2
1
2
22 0
− −+ + −− + +
LNM
OQPLNMOQP =L
NMMO
QPP
a fa f

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig27
Mathematical Model:Linear Model - Transfer Functions
X s
K Kr
V K
M s B s KM s B s K K
K M s B s K
X s
M s B s K K Kr
V
KM s B s K K
K M s B s K
t a
pin
eff eff
eff efft a
pin
eff eff
12
22
12
1
22
2
2
12
1
12
1
22
2
0 22
2
2
02
2
a f
a f
=
−
+ ++ + −− + +
=
+ +
−+ + −− + +
− −
− −
− −

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig28
Mathematical Model:Linear Model - Transfer Functions
X sV s
K Kr
M s B s K
D s
X sV s
K Kr
K
D s
in
t a
p
in
t a
p
12
22
2
2a fa f
c h
a fa f
=
FHGIKJ + +
=
FHGIKJ
( )
( )
D s M M s M B M B s
M M K B B s B B K s Keff eff eff
eff eff eff
( ) = + + +
+ + + + +− − −
− − −
1 24
1 2 2 13
1 2 1 22
1 222 2 3
a f a fa f a f

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig29
Mathematical Model:Linear Model - State Space Equations
q Aq Buy Cq Du= += +
State Variables: State Space Equations:q xq xq xq x
1 1
2 1
3 2
4 2
====
qqqq
KM
BM
KM
KM
KM
BM
qqqq
K Kr M V
yy
qqqq
eff
eff
eff eff
t a
p eff in
1
2
3
4
1
1
1 1
2
2
2
1
2
3
4
1
1
2
1
2
3
4
0 1 0 02 0
0 0 0 10 2
2
0
00
1 0 0 00 0 1 0
0
L
N
MMMM
O
Q
PPPP=
− −
− −
L
N
MMMMM
O
Q
PPPPP
L
N
MMMM
O
Q
PPPP+
L
N
MMMMM
O
Q
PPPPP
LNMOQP =LNM
OQPL
N
MMMM
O
Q
PPPP+
−
−
− − −
0LNMOQPVin

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig30
Mathematical Model:Transfer Functions and State Space Equations
X sV s
s ss s s s
X sV s s s s s
A
C
in
in
12
4 3 2
24 3 2
3 2503 4 5887 2518 72 3449 1265 7 1414 1 284460
1259 32 3449 1265 7 1414 1 284460
0 1 0 0489 45 0 93313 244 72 0
0 0 0 1387 45 0 774 90 14118 0
1 0 0 00 0 1 0
( )( )
. . .. . .
( )( )
.. . .
. . .
. . .
=+ +
+ + + +
=+ + + +
=− −
− −
L
N
MMMM
O
Q
PPPP
L
N
MMMM
O
Q
PPPP
=LNM
OQP
LNMOQP
B =
03.2503
0
D =00

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig31
Mathematical Model:Transfer Functions and State Space Equations
− ± ⇒ =− ± ⇒
0 536 17 1 17 1. . .i rad / s = 0.03130.637 31.2i = 31.2 rad / s = 0.0204
ω ζω ζ
Poles:
X sV sin
1a fa f⇒ − ± ⇒ =0 706 27 8 27 8. . .i rad / s = 0.0254ω ζ
Zeros:X sV sin
2 a fa f⇒ None

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig32
Frequency Response Plots: Analytical
XVin
1
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)Bode Diagrams
-70
-60
-50
-40
-30
-20
100
101
102
-150
-100
-50
0

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig33
Frequency Response Plots: Analytical
Frequency (rad/sec)
Phas
e (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-80
-60
-40
-20
100
101
102
-300
-200
-100
0
XVin
2

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig34
Frequency Response Plots: Experimental
XVin
1
100
101
102
-70
-60
-50
-40
-30
-20
Frequency (rad/s)
Mag
nitu
de (d
B)
100
101
102
-200
-150
-100
-50
0
Frequency (rad/s)
Phas
e (d
egre
es)
EncoderNetwork Analyzer

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig35
Frequency Response Plots: Experimental
10-1
100
101
-60
-50
-40
-30
-20
Frequency (Hz)
Mag
nitu
de (d
B)
Bode Plot for Mass1 (Optical Encoder)
10-1
100
101
-200
-150
-100
-50
0
Frequency (Hz)
Phas
e (d
egre
es)
XVin
1
EncoderSine Sweep

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig36
Frequency Response Plots: Experimental
10-1
100
101
-70
-60
-50
-40
-30
-20
Frequency (Hz)
Mag
nitu
de (d
B)
Bode Plot for Mass1 (IR Sensor)
10-1
100
101
-250
-200
-150
-100
-50
0
Frequency (Hz)
Phas
e (d
egre
es)
XVin
1
IR SensorSine Sweep

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig37
Frequency Response Plots: Experimental
XVin
2
10-1
100
101
102
-55
-50
-45
-40
-35
-30
-25
Frequency (rad/s)
Mag
nitu
de (d
B)
10-1
100
101
-400
-300
-200
-100
0
Frequency (rad/s)
Phas
e (d
egre
es)
IR SensorNetwork Analyzer

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig38
Frequency Response Plots: Experimental
10-1
100
101
-80
-70
-60
-50
-40
-30
-20
Frequency (Hz)
Mag
nitu
de (d
B)
Bode Plot for Mass2 (IR Sensor)
10-1
100
101
-500
-400
-300
-200
-100
0
Frequency (Hz)
Phas
e (d
egre
es)
XVin
2
IR SensorSine Sweep

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig39
Collocated and Non-CollocatedControl Systems
• Collocated Control System– All energy storage elements that exist in the system exist
outside of the control loop.– For purely mechanical systems, separation between sensor
and actuator is at most a rigid link.
• Non-Collocated Control System– At least one storage element exists inside the control loop– For purely mechanical systems, separating link between
sensor and actuator is flexible.

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig40
Poles and Zeros of Transfer Functions:Physical Interpretation
• Complex Poles of a collocated control system and those of a non-collocated control system are identical.
• Complex Poles represent the resonant frequencies associated with the energy storage characteristics of the entire system.
• Complex Poles, which are the natural frequencies of the system, are independent of the locations of sensors and actuators.

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig41
Poles and Zeros of Transfer Functions:Physical Interpretation
• At a frequency of a complex pole, even if the system input is zero, there can be a nonzero output.
• Complex Poles represent the frequencies at which energy can freely transfer back and forth between the various internal energy storage elements of the system such that even in the absence of any external input, there can be nonzero output.
• Complex Poles correspond to the frequencies where the system behaves as an energy reservoir.

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig42
Poles and Zeros of Transfer Functions:Physical Interpretation
• Complex Zeros of the two control systems are quite different and they represent the resonant frequencies associated with the energy storage characteristics of a sub-portion of the system defined by artificial constraints imposed by the sensors and actuators.
• Complex Zeros correspond to the frequencies where the system behaves as an energy sink.

MechatronicsTwo-Mass, Three-Spring Dynamic System
K. Craig43
Poles and Zeros of Transfer Functions:Physical Interpretation
• Complex Zeros represent frequencies at which energy being applied by the input is completely trapped in the energy storage elements of a sub-portion of the original system such that no output can ever be detected at the point of measurement.
• Complex Zeros are the resonant frequencies of a subsystem constrained by the sensors and actuators.