Two-layer distributed optimal control for energy system ... · Two-layer distributed optimal...
181
University of Groningen Two-layer distributed optimal control for energy system integration Alkano, Desti IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite from it. Please check the document version below. Document Version Publisher's PDF, also known as Version of record Publication date: 2016 Link to publication in University of Groningen/UMCG research database Citation for published version (APA): Alkano, D. (2016). Two-layer distributed optimal control for energy system integration. [Groningen]. Copyright Other than for strictly personal use, it is not permitted to download or to forward/distribute the text or part of it without the consent of the author(s) and/or copyright holder(s), unless the work is under an open content license (like Creative Commons). Take-down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Downloaded from the University of Groningen/UMCG research database (Pure): http://www.rug.nl/research/portal. For technical reasons the number of authors shown on this cover page is limited to 10 maximum. Download date: 16-05-2019
Transcript of Two-layer distributed optimal control for energy system ... · Two-layer distributed optimal...

University of Groningen
Two-layer distributed optimal control for energy system integrationAlkano, Desti
IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite fromit. Please check the document version below.
Document VersionPublisher's PDF, also known as Version of record
Publication date:2016
Link to publication in University of Groningen/UMCG research database
Citation for published version (APA):Alkano, D. (2016). Two-layer distributed optimal control for energy system integration. [Groningen].
CopyrightOther than for strictly personal use, it is not permitted to download or to forward/distribute the text or part of it without the consent of theauthor(s) and/or copyright holder(s), unless the work is under an open content license (like Creative Commons).
Take-down policyIf you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediatelyand investigate your claim.
Downloaded from the University of Groningen/UMCG research database (Pure): http://www.rug.nl/research/portal. For technical reasons thenumber of authors shown on this cover page is limited to 10 maximum.
Download date: 16-05-2019

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Two-layer distributed optimalcontrol for energy system
integration
Desti Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
The research described in this dissertation has been carried out in Discrete Tech-nology and Production Automation at the Faculty of Mathematics and NaturalSciences, University of Groningen, The Netherlands.
This thesis has been completed in partial fulfillment of the requirements of theDutch Institute of Systems and Control (DISC) for graduate study.
This research has been financed by a grant of the Energy Delta Gas Research(EDGaR) program. EDGaR is co-financed by the Northern Netherlands Provinces,the European Fund for Regional Development, the Ministry of Economic Affairsand the Province of Groningen.
ISBN (book): 978-94-028-0269-6 ISBN (e-book): 978-94-028-0270-2
Printed by Ipskamp Printing, Enschede

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Two-layer distributed optimalcontrol for energy system
integration
PhD thesis
to obtain the degree of PhD at theUniversity of Groningenon the authority of the
Rector Magnificus Prof. E. Sterkenand in accordance with
the decision by the College of Deans.
This thesis will be defended in public on
Friday 9 September 2016 at 12:45 hours
by
Desti Alkano
born on 14 April 1985in Kediri, Indonesia

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
SupervisorProf. J.M.A. Scherpen
Assessment committeeProf. J. StoustrupProf. M.K. CamlibelProf. Siep Weiland

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
To my family

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Acknowledgments
After spending almost 5 years of pleasant time in the Discrete Technology andProduction Automation (DTPA) group of University of Groningen, this page isapparently the hardest page to write down. My PhD life is imperfect without thenumber of people that I would like to thank.
First of all, I would like to say many thanks to my supervisor, JacquelienScherpen. I saw you several times when I was busy finalizing my thesis at the DTPAlab. I was so naive that I thought you were a secretary of our DTPA group till BayuJayawardhana told me that ’the secretary’ had some PhD position available for me.Thank you for offering me the position even before I finished my master thesis. Iam really fortunate to have you as my supervisor. We shared not only about scienceand research-related work, but also our family and friends. I still remember duringthe first year of my PhD program, I always needed to go to toilet several timesbefore seeing you in some meeting. I was always afraid that I would disappointyou with my stupid questions. Also thank you for your patient guidance for almost5 years and your full support on my future career.
Bayu Jayawardhana has contributed a lot to my scientific journey. Thank youfor the encouragement and opportunity to be your master student. Your correctionsand input on scientific matters gave me the confidence to start doing PhD withJacquelien. I would not be seen by Jacquelien if I did not do my thesis under yourgreat supervision.
This research was financed by a grant of the Energy Delta Gas Research (EDGaR)program. I would like to express my sincere thanks to everyone I met in the EDGaRprogram, especially to Marcel Volkerts, Lukas Grond, Gerard Martinus, and KoenWiersma. Marcel, thank you for our interesting discussions for about 3 years. Youhelped me to love what I was doing.
I am thankful for prof. Jakob Stoustrup, prof. Kanat Camlibel, and prof. SiepWeiland for being my assessment committee. Thank you for constructive commentsto improve the thesis. I would also like to thank Ming Cao for our fruitful discussion
vii

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
and collaboration.I am so happy that two of my best friends in the DTPA group, i.e. Bao Nguyen
and Qingkai Yang, are willing to be my paranymphs. Bao, thank you for your helpand support every time I was stuck with errors on my Latex and Matlab code. Youoften came to my office around 7 p.m. and had nice (and sometimes non-sense)discussions with me. I will miss our routine. Qingkai, thank you for sharing theoffice with me for more than 2 years. You are always energetic, although you havevery long working hours. A special thank to Martijn Dresscher and Matthijs de Jongwho helped me to translate the thesis summary and abstract in Dutch and PutriDwi Utari and Pak Rofiq who designed my thesis cover.
I would like to thank to my colleagues and secretariat of the DTPA group andSmart Manufacturing Systems (SMS) group of University of Groningen, especiallyto Hector, Matin, Frederika, Rully, Zaki, Hadi, Pouria, Ewoud, Gunn, and Mauricio.Hector, thank you for sharing the difficulties and happiness in obtaining our PhDdegree. I had a dream that we could defend our thesis at the same day. However, asyou are much brighter, you deserve for obtaining your degree 3 months earlier. OhMatin, I am so grateful to have you when struggling with the DISC courses and stillto have you around our DTPA corridor after you finished your PhD degree. You’realways there smiling although I was somewhat knowing there’s something you didworry. Thank you for everything, Baby. You’re one of the cleverest women in theworld that I have ever met. Frederika, thank you so much for all kinds of helpyou provided to make my academic and personal life much easier. You’re alwayscheerful and energetic. I do miss your ’Hi guys, see you tomorrow! Have a goodevening! My husband has waited for me outside. Daaag’. Rully, I could not stillbelieve that you’re following me till this far. How come, jongen? And why? You’realways updating me with your great results these years, even though I did not askabout them. I do appreciate your share, Rully. Besides those great results, I feltinspired by your cooking skill and style. Zaki, thank you for always helping meout when some technical problems accidentally occurred to me. Hadi and Pouria,thank you so much for always knocking my office door to ask how I was doingbefore you went home. I would like to thank as well to Ewoud Vos, Gunn Larsen,and Mauricio Munos for being such inspiring and lovely people that I could easilyfind when I was bored with my own matters. Thank you for everything, guys!
During my PhD program, I had opportunities to supervise bachelor and masterstudents. I would like to mention Wouter Nefkens, Ilco Kuiper, Julia Bottela, andYounes Chorfi for such powerful joint work resulting in some conference and journalpapers. I am very thankful to them for helping me to improve my teaching skilland to gain more knowledge on the EDGaR project itself by answering their greatquestions.
I am grateful to have always Indonesian friends living in Groningen, sharingtheir daily matters and, of course, sharing their immensely delicious food with me

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
almost every weekend. Thank you, Tante Indah & Oom Yon for being my parentsin the Netherlands, Mbak Tiurma for sharing the apartment for 3 years and fortaking great care of Daanish, Mbak Indres & Felicia for always being my inspiration,Mas Donny & Mbak Nieke for being a great brother and sister, Mbak Adzkiya andMas Riffat for being soulmates of my son (Daanish), Bu Rini, Pak Asmoro, MasAdi, and Mbak Ifa, Mbak Laksmi,Mas Kadek, Mbak Vina, Mbak Dita, Noorma, Irfan,Liza, Zidan, Caca, Salma, Dini, Bintoro, Widi for for being my close family, Puti,Arramel, Meisya, Intan, Guntur, Nadia, Azka, Hannae, Mas Nandang, Teh Nisa,Pandji, Faizah, Hanna, Mas Kus, Mbak Fitri, Mas Haidar, Mbak Pia, Fean, Bu AriWdyanti, Pak Titah, Mbak Ari, Mas Herman, Budhe Nannie, Wak As & suami, MasDidik and Mbak Rosel’s family, Mas Zainal and Ayu’s family, Intan and Kinan, Fajar,Monika, Runa, Mbak Icha and Mas Kris’ family, Mbak Ira, Mbak Frita, Susan, MasBino, Anika, Amalina’s family, Ali Syariati, Liany, Mas Fanny, Mas Ronny, MbakNur, Bu Ima, Pak Hengki, Ela, Sofi, Mas Teguh’s family, Mas Surahyo, Mbak Awalia,Mbak Keisha, Mbak Katya, Mbak Christina Avanti, Vinny, Mbak Mutia, Pak Tatang’sfamily, Pak Taufik’s family, Mbak Nunung, Budhe Nanie & Oom Fred, Nadya & Johanfor sharing those 5 years of pleasant time in Groningen.
To my family in Maastricht, i.e. Mas Wisnu’s family, Mas Ferdi’s family, MbakUpie Spee’s family, MasArianto’s family, Mas Dani’s family, Mbak Upi Rachminawati’sfamily, thank you for making my weekends in Maastricht so colorful. I would alsolike to thank Tezar, Intan, Aiden, Sannya, Dimas, and Hafshah for inspiring andaccompanying me to stay in The Netherlands.
I am very grateful to have full support from my parents and siblings to pursuethe master and PhD programs that I took in Groningen, which is about 13,000 kmfrom my hometown. Thank you so much for your belief on my ability to finishmy educational programs here. Mama Binti and Ayah Suko, many thanks foralways encouraging me to love and finish whatever I have started. Raising a childwhile finishing the PhD program was not easy without great help from my brother,Reddy. Thank you so much, Reddy. Thank you, Dik Kenny Alkano, Zul, Leyna, Killa,Phaskia Alkano, and Karen Alkano for taking good care of our mom and dad whenI was (and currently still) far away. I wish you all success! Many thanks as well toPapa Edie, Mama Mariam, and Anto for supporting me and my husband till this far.
Finally, I would like to deeply thank to Mas Iging and Daanish for always beingsupportive and being my motivation to finish the PhD program on time. Mas, youare indeed a dedicated husband and father. At the beginning I let you live onlywith Daanish in Maastricht, I certainly wanted to take a train back to Maastrichtwhenever you said that Daanish did not want to eat, sleep, take a bath, or go to hisdaycare/brush his teeth. You managed to be a great father immediately and now Isee myself not comparable with you in treating Daanish as a toddler. Thank you foreverything, Sayang.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Desti AlkanoGroningen, June 2016

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Contents
1 Introduction 11.1 Towards decentralizing gas market . . . . . . . . . . . . . . . . . . 11.2 Energy system integration . . . . . . . . . . . . . . . . . . . . . . . 31.3 Distributed optimal control . . . . . . . . . . . . . . . . . . . . . . 41.4 Contributions and thesis outline . . . . . . . . . . . . . . . . . . . . 61.5 EDGaR project . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.6 List of publications . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Preliminaries 112.1 Constrained utility maximization and Lagrange duality . . . . . . . 12
2.1.1 Solution via dual decomposition . . . . . . . . . . . . . . . 142.1.2 Convergence . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Model predictive control . . . . . . . . . . . . . . . . . . . . . . . . 172.2.1 Principle of operation . . . . . . . . . . . . . . . . . . . . . 172.2.2 Model predictive control for distributed coordination . . . . 18
2.3 Asynchronous implementation . . . . . . . . . . . . . . . . . . . . . 202.3.1 Asynchronous supply coordination by a grid operator . . . . 202.3.2 Asynchronous supply coordination by agent i . . . . . . . . 21
2.4 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 Supply coordination of agents coupled to multiple energy grids 253.1 Problem setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 Agents with energy converters and gas storage devices . . . . . . . 26
3.2.1 Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.2.2 Problem formulation . . . . . . . . . . . . . . . . . . . . . . 30
3.3 Distributed Supply Coordination . . . . . . . . . . . . . . . . . . . 333.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4.1 Fairness and practical implementations . . . . . . . . . . . . 37
xi

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.4.2 Simulation results . . . . . . . . . . . . . . . . . . . . . . . 383.5 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4 Asynchronous supply coordination in multiple energy grids 474.1 Problem setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.1.1 Agents embedded in multiple grids . . . . . . . . . . . . . . 494.1.2 Distributed supply coordination . . . . . . . . . . . . . . . . 51
4.2 Asynchronous supply coordination in a static case . . . . . . . . . . 554.2.1 Asynchronous supply coordination by grid operator m . . . 554.2.2 Asynchronous supply coordination by agent i . . . . . . . . 56
4.3 Asynchronous supply coordination in a dynamic case . . . . . . . . 614.3.1 Dynamic asynchronous supply coordination by agent i . . . 614.3.2 Dynamic asynchronous supply coordination by grid operator m 664.3.3 Suboptimal strategy . . . . . . . . . . . . . . . . . . . . . . 67
4.4 Power-to-Gas case study . . . . . . . . . . . . . . . . . . . . . . . . 684.4.1 Simulation setup . . . . . . . . . . . . . . . . . . . . . . . . 684.4.2 Distribution charge behavior . . . . . . . . . . . . . . . . . 694.4.3 Performance evaluation . . . . . . . . . . . . . . . . . . . . 71
4.5 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5 Asynchronous supply and consumption coordination of biogas pro-sumers 735.1 Problem setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735.2 Prosumers with biogas μ-CHPs and energy storage devices . . . . . 75
5.2.1 μ-CHP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.2.2 Heat buffer . . . . . . . . . . . . . . . . . . . . . . . . . . . 775.2.3 Gas storage device . . . . . . . . . . . . . . . . . . . . . . . 775.2.4 Capacities on the energy grids . . . . . . . . . . . . . . . . . 78
5.3 Distributed supply and consumption coordination . . . . . . . . . . 795.3.1 Model predictive control problem . . . . . . . . . . . . . . . 815.3.2 Distributed MPC problem . . . . . . . . . . . . . . . . . . . 82
5.4 Asynchronous supply and consumption coordination . . . . . . . . 845.4.1 The implementation in a dynamic case . . . . . . . . . . . . 84
5.5 Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.5.1 Synchronous vs asynchronous updates . . . . . . . . . . . . 875.5.2 Reaction on overloaded and underloaded grids . . . . . . . 885.5.3 Fairness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.6 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . 90

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6 Asynchronous distributed control of the energy supply-demand bal-ance 936.1 Problem setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936.2 System model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6.2.1 A micro grid of prosumers . . . . . . . . . . . . . . . . . . . 976.2.2 External energy grids . . . . . . . . . . . . . . . . . . . . . . 1016.2.3 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.3 Optimal supply and demand control . . . . . . . . . . . . . . . . . 1066.3.1 Model predictive control . . . . . . . . . . . . . . . . . . . . 1066.3.2 Distributed MPC problem . . . . . . . . . . . . . . . . . . . 107
6.4 Asynchronous distributed optimal supply and demand control . . . 1106.5 Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.5.1 Simulation setup . . . . . . . . . . . . . . . . . . . . . . . . 1146.5.2 The impact of different information topology of the commu-
nity shown in the matrix A . . . . . . . . . . . . . . . . . . 1166.5.3 Flexible and fixed heat demand . . . . . . . . . . . . . . . . 1176.5.4 Interpretation of shadow price . . . . . . . . . . . . . . . . 1196.5.5 Convergence of synchronous and asynchronous coordination 121
6.6 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7 Conclusion and outlook 1257.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1257.2 Outlook . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
A Proofs of Lemmas 4.16 - 4.22 129A.1 Proof of Lemma 4.16 . . . . . . . . . . . . . . . . . . . . . . . . . . 129A.2 Proof of Lemma 4.17 . . . . . . . . . . . . . . . . . . . . . . . . . . 129A.3 Proof of Lemma 4.18 . . . . . . . . . . . . . . . . . . . . . . . . . . 130A.4 Proof of Lemma 4.19 . . . . . . . . . . . . . . . . . . . . . . . . . . 131A.5 Proof of Lemma 4.20 . . . . . . . . . . . . . . . . . . . . . . . . . . 131A.6 Proof of Lemma 4.21 . . . . . . . . . . . . . . . . . . . . . . . . . . 132A.7 Proof of Lemma 4.22 . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Bibliography 135
Summary 145
Samenvatting 149

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 1Introduction

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 1
Introduction
1.1 Towards decentralizing gas market
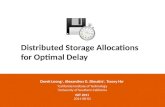
Discovered in 1959, the Groningen field is the largest gas field in Europe and thetenth largest gas field in the world [2]. Its supply chain is schematically illustratedin Figure 1.1.
From Groningen, the high-pressure transmission (HPT) lines transport naturalgas across the Netherlands. The pressure of the grid is 66 bar. There exist two HPTlines; one is for transporting low-calorific gas and the other one is for transportinghigh-calorific gas. Besides transporting gas across the country, the HPT lines areused to inject (export) the imported (exported) gas from (to) other countries. Gasstorage sites with a national scale are also embedded in the HPT lines. ThroughMetering & Regulating (M&R) stations, the 66-bar gas pressure is reduced to 40 barand is then injected to the regional transmission lines. At these lines, some large gasconsumers, e.g. factories, are embedded. From the regional transmission lines, gasis injected to Gas Receiving Station (GRS). Within GRS, the gas pressure is reducedfrom 40 bar to 8 bar. The gas is then supplied to the high-pressure distributiongrid. Afterwards, the gas is injected to supply stations in order to reduce the gaspressure to 100 or 30 mbar. From the supply stations, the gas is supplied to thelow-pressure distribution grid. Finally, gas end-users and small factories can utilizethe gas at 100 or 30 mbar from the low-pressure distribution grid.
As seen also in the figure, the distribution grids consist of high and low pressuredistribution grids, operated by Distribution Service Operators (DSOs). Theseoperators are also responsible for operating supply stations as well. High pressureand regional transmission lines as well as M&R station and GRS are managed andoperated by Transmission Service Operator (TSO).
The Dutch gas market is changing towards liberalized and decentralized gasmarket [102]. It results from the ambition of the European Union and the DutchGovernment to meet approximately 20% of the gas consumption in 2030 withsustainable gas supply [91]. In particular, these days gas end-users may producerenewable gases. One of the renewable gases is biogas. Biogas results from theanaerobic digestion of organic waste [19], [56]. The biogas production level there-fore depends on the weather conditions and agricultural seasons. One possibility to

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
2 1. Introduction
High pressure transmission lines (66 bar)
Regional transmission lines (40 bar)
High pressure distribution grid (8 bar)
Low pressure distribution grid (100 or 30 mbar)
M&R station
GRS
Supply station
Storage Import
Production
Power generation
Large industry
Export
Industry
Industry
Industry
Households
TSOs
DSOs
Figure 1.1: Schematic illustration of the current gas supply chain from the Groningenfield [102]. M&R station, GRS, TSO, and DSO stand for Metering & Regulating station,Gas Receiving Station, Transmission Service Operator, and Distribution Service Operator,respectively.
use the produced biogas is to inject it to the low-pressure distribution grids hencecreating some revenue. However, in order to meet the quality requirement of theinjection, the produced biogas needs to be upgraded to bio-methane, i.e. greengas. The Dutch government aims at fulfilling 5% of the country’s gas demand usinggreen gas by 2020 [3].
Another type of the renewable gas is hydrogen. There exists a technologyso-called Power-to-Gas whose main component is an electrolyzer [27]. The facilityconverts excess electrical energy, i.e. due to the high penetration of wind andsolar energy, into hydrogen. Currently, 0.02% of the capacity of the low-pressuredistribution grid in the Netherlands can be fulfilled by hydrogen [43].
The sources of the produced biogas and hydrogen can be considered as intermit-tent sources, due to high dependence on agricultural season and weather condition,

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
1.2. Energy system integration 3
respectively. The introduction of such renewable gases thus provides a large impacton the gas distribution grid. Particularly, the gas flow will become bidirectional,come from multiple sources at multiple locations, and may have varying qualities.It is then desirable that the gas distribution grid transforms from a mono-gas systeminto a multi-gas system.
1.2 Energy system integration
With recent development, gas can be utilized to produce electrical energy and heatsimultaneously by using a device so-called Combined Heat and Power (CHP) [74].On a residential level, this device is able to produce electrical energy up to 15 kW[41]. It is commonly named a micro-CHP (μ-CHP) device.
The μ-CHP devices can be controlled based on either power or heat demand.The produced electricity can be used by the owners of μ-CHP devices to satisfytheir local power demand and/or to inject it to the low-voltage power grid hencecreating some revenue. The generated heat can be used for a district heatingnetwork and/or to fulfill the local heat demand of the owners of μ-CHP devices. Inwhat follows, we call the owner of μ-CHP devices a prosumer as the prosumer cancontrol its energy production and make locally use of its energy production.
Equipped with smart electric appliances, e.g., smart air conditioner, refrigerator,washing machine, whose demand is shiftable in time as well as heat buffers whichhave a range of comfort levels, the prosumers can exploit their flexibilities inboth production and demand sides. The net load profiles of the prosumers willthen be less predictable. Hence, the integration of the prosumers in the energyinfrastructures, including the gas distribution grid, power grid, and district heatingsystem, will highly impact the performance of the infrastructures. Moreover, as thenumber of such prosumers equipped with distributed co-generation, e.g., μ-CHPdevices, increases, the degree of integration of the different energy infrastructuresincreases.
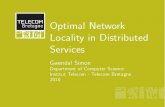
With the aforementioned developments, the DSOs need to change their passivegrid management to active grid management in an effort to maintain the gridstability [97]. Specifically, the DSOs are expected to have bidirectional coordinationwith the prosumers. Figure 1.2 illustrates how the gas grid will look like with theintegration of new gases and co-generations. The figure is provided by Liander, anenergy DSO in the Netherlands. Liander aims at actively monitoring and controllingthe quality and flow of gas and increasingly interacting with the power and heatgrids.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4 1. Introduction
Figure 1.2: Smart gas grid [6]
1.3 Distributed optimal control
The developments of and requirements for the future gas infrastructure motivateus to consider a large number of prosumers building a community embedded inmultiple energy grids. Within the community, the prosumers help each other tolocally balance between supply and demand. Hence, it increases the value ofthe produced renewable energy and reduces the energy losses. When they havesurplus gas, they may create some revenue by selling it to the gas grids [28].Equipped with energy converters, the prosumers may sell the converted energy tothe corresponding energy grids hence also creating some revenue [84].
Within this setting, the prosumers are coupled with each other taking intoaccount two factors. Firstly, the limited capacities of the energy grids, e.g., trans-mission lines and valve limitations, restrict the energy supply level of prosumersto the grids. Secondly, the prosumers influence each other in the community in aneffort to maintain the balance between demand and supply within the community.
Due to the competitive nature of the liberalized and decentralized market, itrequires a distributed controller for each prosumer and energy grid operator to

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
1.3. Distributed optimal control 5
solve the associated optimal control problems. It motivates us to study bidirectionalcoordination between the prosumers and the connected energy grid operatorsand between the prosumers and their neighboring prosumers in the communityby decoupling the two aforementioned coupling factors. With the bidirectionalcoordination, we aim at obeying the grid capacity constraints and satisfying thetechnical constraints of the prosumers when locally solving the associated optimalcontrol problems.
There exists a large literature on studying bidirectional communication betweenprosumers and their neighboring prosumers, e.g., [68], [83], and [70]. Theprosumers communicate with each other and reach an agreement towards theirglobal goal in a distributed fashion. Additionally, most of recent studies, e.g.,[11], [62], [100], [95], and [68], deal with a single-grid perspective in developinga supply coordination framework. In contrast, such bidirectional coordinationbetween a prosumer and multiple grid operators to avoid congested grids has notbeen studied.
A practical challenge to implement the bidirectional coordination is the presenceof asynchronous exchange information. In practice, both prosumers and gridoperators may not have access to a common clock when solving their problems andsharing their information. As a result, they solve their problems based on out-datedinformation.
Inspired by [76], the distributed asynchronous coordination has been exten-sively implemented in, e.g., [37], [34], for a static case in communication networks.Some recent studies, e.g. [20], [45], and [21], adopted real-time congestion controlof communication networks for the energy distribution grid. Both the congestioncontrol problem in the energy distribution grids and in communication networkscan be tackled by using distributed optimal control methods. Additionally, both ofthem are designed to handle controllable and uncontrollable loads.
Besides the help from the neighboring prosumers in the community, it is desir-able for the prosumers to own energy storage devices in order to mitigate theirlocal imbalance between supply and demand. The existence of the storage devicesleads us to incorporate the dynamics of the storage devices when studying thedistributed asynchronous optimality of the associated optimal control problems.
In this thesis, we also aim at anticipating the future condition on the energygrids and on prosumers’ supply and demand profiles and incorporating all staticand dynamics constraints of prosumers. We thus formulate the optimal controlproblems in Model Predictive Control, solved in a distributed manner. We referthe reader to, e.g., [35], [80], and [82], for the detailed explanation of the MPCapproach, whereas the feasibility and stability for solving the MPC problem in adistributed manner can be found in [52].

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6 1. Introduction
1.4 Contributions and thesis outline
Below, we list the contributions of the thesis:
1. We start with dealing with a multiple-grid perspective at which each energyproducer has more than one type of energy to produce and sell to multipleenergy grids. It is therefore necessary to take into account all possible currentand predicted limitations in the associated energy grids. With this setting,it is natural to formulate the associated optimal control problem in modelpredictive control framework.
2. We develop a distributed coordination method enabling the energy producersto locally maximize their utility subject to their technical and dynamics con-straints. Yet, coordination with the associated grid operators is still necessaryto obey the grid capacity constraints. It results in two-layer distributed supplycontrol which is performed with bidirectional communication between theproducers and the grid operators.
3. We study asynchronous information exchange on the proposed distributedcoordination. The convergence of the distributed asynchronous coordinationalgorithm is proved in both the static and the dynamic environments.
4. We examine some benefits on building a community consisting of producersand consumers, shortly prosumers. The prosumers have capabilities to controltheir production levels and demand profiles. The community goal is tominimize the imbalance between supply and demand within community.
5. We employ an information topology allowing the prosumers to keep trackof the community imbalance. They share asynchronously their imbalanceinformation to their neighboring prosumers within the community and com-municate asynchronously their supply bids, if they have excess producedenergy, to the corresponding grid operators. We prove analytically the con-vergence of the asynchronous information exchange.
The rest of the thesis is organized as follows.Chapter 2 provides preliminaries on constrained utility maximization, La-
grangian duality, model predictive control, and asynchronous supply coordinationwith a single-grid perspective for a static maximization problem.
Chapter 3 is based on our work presented in [18] and [12], proposing supplycoordination for energy producers equipped with storage devices. The energyproducers, i.e. PtG facilities, are coupled to various energy grids. The technical anddynamics constraints of PtG facilities and the grid capacity constraints are takeninto account when solving the associated utility maximization problem. We study

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
1.4. Contributions and thesis outline 7
fairness and practical implementations of our proposed algorithm. The algorithmperformance is evaluated by applying the algorithm to a number of scenarios.
Chapter 4 is based on our work published in [16] and [14]. The aim is tostudy asynchronous information exchange for the proposed distributed supplycoordination between dynamic agents, e.g., PtG facilities equipped with storagedevices, and the DSOs. The convergence of the asynchronous distributed supplycoordination algorithm in both the static and the dynamic cases are shown inthe chapter. To illustrate the algorithm convergence and to study its practicalimplementations, the algorithm is applied for a setup consisting of PtG facilitiesembedded in a gas grid, mobility industrial grid, and power grid.
Chapter 5 is based on our work presented in [13]. We consider a communityconsisting of biogas prosumers possessing a central anaerobic digester. The pro-sumers are embedded in low-pressure gas distribution grid, and low-voltage powergrid. The prosumers are equipped with μ-CHP devices, decentralized gas storagedevices, and heat buffers. Formulated with the model predictive control frame-work, we study the asynchronous distributed algorithm proposed in Chapter 4 tocoordinate both supply and consumption level of prosumers within the community,given the predictions of future local net load profiles and future conditions on thelow-pressure gas distribution grid and low-voltage power grid. Reactions of DSOswhen foreseeing overloading and underloading grids are shown with simulationresults.
Chapter 6 is based on our work presented in [17]. We consider the communityconsisting of biogas prosumers. They are equipped with local anaerobic digesters,μ-CHP devices, decentralized gas storage devices, local heat buffers, and local smartheating system with a certain range of comfort temperature levels. The prosumershelp each other to minimize local imbalance between biogas supply and demand.The community is embedded in external energy grids. They can import energy ifthere is biogas shortage within the community. They can export their excess energyproduced to external energy grids hence creating some revenue. In this chapter, weextend the distributed algorithm proposed in Chapter 4 to asynchronously commu-nicating the states of the imbalance to neighboring prosumers in the communityand to asynchronously sharing the supply bids to the associated DSOs. We conductsimulations using realistic data to study the behavior of bidding process between aprosumer and its neighboring prosumers and between a prosumer and connectedDSOs.
Chapter 7 provides conclusion of the thesis and an outlook of the future re-search.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
8 1. Introduction
1.5 EDGaR project
The research has been financed by a grant of the Energy Delta Gas Research(EDGaR) program. EDGaR is co-financed by the Northern Netherlands Provinces,the European Fund for Regional Development, the Ministry of Economic Affairsand the Province of Groningen. The research was carried out as part of the project”Innovative smart grid solution for the new gas value chain”, which includedUniversity of Groningen, Gasunie, GasTerra, and Hanze University of AppliedSciences. The project finished in January 2015.
The aim of the project was to investigate the capacity of smart grid technologiesto facilitate the introduction of new gases, which are produced in multiple decen-tralized points with various qualities, in the existing gas grids. Within the project,some innovations were proposed, including: a gasboard, a smart energy systemmaturity model, and a smart gas grid maturity model.
Our role is to provide new-gas producers a means to control their productionand demand profiles. We also wish to provide a fair and dynamic pricing mechanismfor producers and consumers in the future gas grids. With the mechanism, we aimat obeying the grid constraints as well as technical and dynamics constraints ofproducers and consumers while locally maximizing their utility.
1.6 List of publications
Journal papers
1. D. Alkano and J.M.A. Scherpen, ”Distributed supply coordination for Power-to-Gas facilities embedded in energy grids,” To appear in IEEE Transactionson Smart Grid, DOI: 10.1109/TSG.2016.2574568.
2. D. Alkano, J.M.A. Scherpen, and M. Cao, ”Distributed asynchronous coordi-nation for dynamic agents embedded in multiple grids,” Under review.
3. D. Alkano and J.M.A. Scherpen, ”Distributed asynchronous supply and con-sumption coordination of biogas prosumers,” Submitted.
4. D.Alkano, J.M.A. Scherpen, and Y. Chorfi, ”Distributed asynchronous controlof biogas supply and multi-energy demand,” Submitted.
Conference papers
1. D. Alkano, W. Nefkens, J.M.A. Scherpen, and M. Volkerts, ”Storage sizingfor embedding of local gas production in a micro gas grid,” EPJ Web ofConferences, vol. 79, 03005p.1-p.9, 2014. Presented in 3rd European EnergyConference, Budapest, Hungary, Oct. 2013.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
1.6. List of publications 9
2. D. Alkano, W. Nefkens, J.M.A. Scherpen, and M. Volkerts, ”Optimal flowcontrol in a micro grid of prosumers using model predictive control,” In Proc.Of 21th International Symposium on Mathematical Theory of Networks andSystems, pp. 592-598, Groningen, Netherlands, July 2014.
3. D. Alkano, I. Kuiper, and J.M.A. Scherpen, ”Distributed model predictivecontrol for Power-to- Gas facilities embedded in multiple energy grids,” InProc. of European Control Conference 2015, pp. 1468-1473, Linz, Austria, July2015.
4. D. Alkano, J.M.A. Scherpen, and M. Cao, ”Distributed asynchronous supplycoordination for producers embedded in multiple energy grids,” In Proc. ofIEEE Conference on Decision and Control 2015, pp. 5239-5244, Osaka, Japan,Dec. 2015.
Conference abstracts
1. D. Alkano and J.M.A. Scherpen,”Distributed dynamic price mechanisms in thenew gas chain,” In Proc. of the 31st Benelux Meeting on Systems and Control,Heijderbosch, the Netherlands, March 2012.
2. D. Alkano and J.M.A. Scherpen, ”Storage sizing for a micro gas grid ofprosumers,” In Proc. of the 33th Benelux Meeting on Systems and Control,Heijen, the Netherlands, March 2014.
3. D. Alkano, I. Kuiper, and J.M.A. Scherpen, ”Distributed supply coordinationfor Power-to-Gas facilities embedded in the energy grids,” in Proc. 34thBenelux meeting on systems and control, Lommel, Belgium, March 2015.
Book chapter
• D.B. Nguyen, D Alkano, J.M.A. Scherpen, ”The optimal control problem insmart grids,” Chapter 7 in Smart Grids from a Global Perspective: Bridging Oldand New Energy Systems, Eds. J.A. Beaulieu, J.H. de Wilde, J.M.A. Scherpen,Springer, 2016.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 2Preliminaries

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 2
Preliminaries
This chapter reviews some properties of a constrained utility maximization prob-lem, introduces a Model Predictive Control (MPC) scheme, describes how anasynchronous information exchange is generally implemented when solving theproblem.
The problems studied in this thesis subject to technical constraints, includingflow rate constraints, grid capacity constraints, and some dynamics constraints dueto, e.g., the needs to take available amounts of source in a buffer into account.We therefore start the chapter by reviewing some properties of the constrainedutility maximization problems in Section 2.1. Due to practical and computationallimitations, it is desirable to solve the problems in a distributed fashion. In doingso, we use a dual decomposition approach combined with the gradient projectionmethod. The approach and method are also reviewed in the section.
To handle all technical constraints, including their predictions, over multipletime steps, we propose to use a model predictive control (MPC) scheme. Theprinciple of the MPC operation is provided in Section 2.2. We implement the MPCscheme for solving the problems introduced in Chapters 3, 5, and 6. In thesechapters, we have the MPC problems solved in both centralized and distributedfashions.
Practically, the agents considered in this thesis may not have access to a com-mon clock to synchronize their updates. Thus, in Section 2.3 we review how anasynchronous information exchange is generally implemented when solving theproblem in a distributed fashion. Throughout the section, we state assumptions onthe constrained utility maximization problems and on the consecutive updates ofinformation exchange. We also state a proof for the convergence of the algorithmsas presented in [76] in the section. Finally, some concluding remarks of the chapterare given in Section 2.4.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
12 2. Preliminaries
2.1 Constrained utility maximization and Lagrangeduality
Constrained optimization is a well-developed area in both theoretical and practicalaspects. We refer the reader to, e.g., [76], [30], [32] for the detailed explanationof the constrained optimization for both linear and non-linear systems. For someapplications of the constrained optimization problems, see, e.g., [24], [39], [101],[72]. In most studies, the problems are subject to flow constraints that sources withdifferent characteristics and capabilities should react differently to, e.g., a networkcongestion. One way of quantifying these differences is through utility functions.The definition of the functions is stated in the following definition.
Definition 2.1. [59] The utility function of a source indicates how much enjoymentthe source can get out of transmitting at a given rate.
In this chapter, we focus on a utility maximization under coupling constraintsintroduced in [76]. Now, consider a set I = {1, . . . , n} of agents. At the timeinstance k ∈ {1, . . . ,K}, agent i generates a product at a rate of xi(k). This rateis supplied to a grid, which has a limited capacity c(k). Hence, the grid capacitylimits the supply levels of the agents given by
n∑i
xi(k) � c(k). (2.1)
Due to the capacity of its transmission lines, there exist minimum and maximumamount xi(k), xi(k) ∈ R+ that agent i can deliver. These constraints are given by
Xi = {xi(k)|xi � xi(k) � xi}. (2.2)
For each agent i, the supply rate xi(k) is characterized by (Ui(k),Xi). Agent i
receives some utility Ui(k) when it supplies its product to the grid at a rate of xi(k),which satisfies the constraints (2.1) - (2.2). The control objective is to decide thesupply levels xi(k) for all agents i ∈ I so as to:
Problem 2.2.
maxxi
n∑i=1
Ui(k),
subject to constraints (2.1) - (2.2) for all agents i ∈ I at each time k.
Problem 2.2 is in fact a simplification of problem P in [76]. The detailed basicsof convexity and feasibility of the problem P can be found in [85] and [95]. The

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
2.1. Constrained utility maximization and Lagrange duality 13
problem P assumes that each agent chooses a fixed route which is specified by asequence of links in order to supply its source to a destination, whereas problem2.2 assumes that each agent chooses a route specified by only one link to connectbetween its source and destination. The route has a limited capacity, denoted asc(k) in constraints (2.1).
There are in fact some nice properties of the basic utility model which providethe mathematical tractability of the utility model. They are specifically due toseveral simplifying assumptions on the utility functions and on the associatedconstraints. However, because of the assumptions, the applicability of the utilitymaximization problem is limited. In particular, the utility functions Ui(k) are oftenassumed to be (strictly) concave functions.
Generally, one uses the definition of a convex function in defining the concavefunction, as a function U is concave if −U is a convex function [33]. We thereforestate the definition of convex function in the following definition. If one excludesthe equality sign on the definition of convex function, he obtains a strictly convexfunction.
Definition 2.3. [33] A function U : Rn → R is convex if, for all x, y ∈ dom U
and θ ∈ [0, 1], θx + (1 − θ)y ∈ dom U (i.e., the domain is a convex set) andU(θx+ (1− θ)y) � θU(x) + 1(1− θ)U(y).
Next, we state the feasibility and uniqueness of the optimal solutions for theutility maximization problem 2.2 under certain assumptions in the following propo-sitions.
Proposition 2.4. [95], [85] The concavity assumption on the utility function andthat the inequality constraints are convex lead the problem 2.2 to become a convexoptimization problem. A solution xi(k) in the domain of the problem is feasible if itsatisfies all constraints (2.1)-(2.2).
Proposition 2.5. [95] There exists a unique maximizer xi(k) for each agents i whenthe objective function Ui(k) is assumed to be strictly concave in its argument and allconstraints (2.1) - (2.2) are convex. The solution can, however, be infeasible.
Solving Problem 2.2 requires a centralized authority that has knowledge of allstates, local measurements, and objective function of all agents. These require-ments result in practical and computational limitations. In particular, each agent ipractically aims at deciding its supply levels based on its local information, since itmay not be willing to share its information to all agents within a network. Addition-ally, the centralized computation may result in high computational requirementswhen large amount of data to be communicated along the whole network and largeoptimization problems need to be solved. The nature of the problem thus requiresa distributed controller, that each agent i is able to locally decide its supply level

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
14 2. Preliminaries
based on its local information. Yet, some coordination with the grid operator is stillnecessary to obey the grid capacity constraints. The following subsection reviewsthe decomposition methods to solve locally the problem.
2.1.1 Solution via dual decomposition
To obtain the distributed formulation of Problem 2.2, we decompose the probleminto distributively solvable sub-problems. The sub-problems are solved by theagents. The solutions of the sub-problems are then iteratively coordinated to thecentralized authority, who owns a high-level master problem, in order to find theoptimal solutions.
We now briefly review two decomposition techniques, i.e. dual decompositionand primal decomposition methods, based on [85]. With the primal decompositionmethod, the centralized authority directly allocates some amount of capacity thateach sub-problem can use. The primal decomposition is only appropriate when theoriginal problem has a complicating variable among agents such that, when thevariable is fixed to some value, the rest of the original problem can be decoupledinto sub-problems.
Example 2.1. [85] Consider the original problem:
maxxi,y
n∑i=1
Ui(xi),
subject to xi ∈ Xi, xi � y, y ∈ Y for all agents i = 1, . . . , n. When the parameter yis fixed for each agent i, then the original problem is separable for each agent i.We thus have a two-layer optimization problem. At a lower level, given y which isfixed, each agent i solves:
maxxi
Ui(xi), (2.3)
subject to xi ∈ Xi, xi � y. And at the higher level, we have the master problemtaking care of updating y by solving
maxy
n∑i=1
U∗i (y), (2.4)
subject to y ∈ Y, where U∗i (y) are the optimal values of utility functions in (2.3)
solved by each agent i for a given y.
We instead use the dual decomposition method in this thesis. The methodis based on decomposing the Lagrangian dual problem. The associated masterproblem faced by a centralized authority sets a dynamic variable, i.e. dual variable.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
2.1. Constrained utility maximization and Lagrange duality 15
The variable is published to the connected agents allowing the centralized authorityto ensure that their grid capacity constraints are met.
Let λ(k) � 0 be the dual variables associated with the grid capacity constraints(2.1) at time k. The Lagrangian function of Problem 2.2 is given by
L(xi(k), λ(k)) =
n∑i=1
U(xi(k))− λ(k)(
n∑i=1
xi(k)− c(k)). (2.5)
Define g(λ(k)) = supL(xi(k), λ(k)) as the dual function of Problem 2.2. Wethen obtain the dual of Problem 2.2 specified by
Problem 2.6.
min g(λ(k))
subject to λ(k) � 0 and boundary conditions xi(k) ∈ Xi for all agents i = 1, . . . , n ateach time k.
Note that Problem 2.6 is a convex optimization problem, with variables λ(k) � 0.We therefore obtain the following proposition.
Proposition 2.7. [85] As the dual variable λ(k) � 0, any feasible solutions of λ(k)provide an upper bound of the optimal value of Problem 2.2. Hence, we obtaing(λ(k)) � U(xi(k)) for any feasible xi(k) and any λ(k) � 0.
Remark 2.8. By exploiting the decomposable structure of the Lagrangian functionin 2.5, we obtain a two-layer optimization problem. At a lower level, we have thesub-problems faced by agent i given by
Problem 2.9.
maxUi(xi(k))− λ(k)xi(k)
subject to constraints (2.2).
At the higher level, we have the master problem to take care of updating thedual variables λ(k) by solving
Problem 2.10.
min g(λ(k)) =
n∑i=1
gi(λ(k)) + λ(k)c(k),
subject to λ(k) � 0, where gi(λ(k)) is the dual function obtained as the maximumvalue of Problem 2.9 solved by all agents i = 1, . . . , n for a given λ(k).

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
16 2. Preliminaries
We solve Problem 2.10 using the gradient method [30]. To do so, we start withan initialization of dual variables λ(k) � 0 and update them based on
λr+1(k) = λr(k) + αr(k)(
n∑i=1
xri (k)− c(k)), (2.6)
where αr(k) > 0 is a gradient step size and r is an iteration index within each timek. Different choices of the step size, including constant and diminishing step sizes,are provided in [30]. The terms
∑ni=1 xi(k) − c(k) in the updates (2.6) are the
slacks in the link capacity. The slacks can either be positive or negative values whenthe grid is overloaded and underloaded, respectively. The updates are terminatedwhen, e.g., the updates of λr(k) stay within a certain bound ξ and the grid capacityconstraints 2.1 are met. The distributed algorithm is summarized in Algorithm 1.
Algorithm 1: Distributed algorithm for solving Problem 2.2
Result: Find x∗i (k) for each agent i.
Initialize λr=0(k) � 0 ;while |λr(k)− λr−1(k)| � ξ and the grid capacity constraints 2.1 are met do
for agent i = 1, . . . , n dosolve Problem 2.9, given λr(k);
endEach agent i publishes xr
i (k) to the grid operator;The grid operator updates the dual variables λr(k) according to theupdates (2.6) and shares the variables to all agents.
end
In the following subsection, we show that for any α which is sufficiently small,the distributed algorithm will converge to the optimal solution of Problem 2.2. Itmeans that
xri (k) → x∗
i (k), and
λr(k) → λ∗(k)
for r → ∞ and for each agent i = 1, . . . , n and each time k = 1, . . . ,K, wherex∗i (k) and λ∗(k) are primal and dual solutions, respectively.
2.1.2 Convergence
In this section, we establish the convergence of the primal optimal x∗i (k) and the
dual optimal λ∗(k). To do so, we consider the following assumption on the utilityfunctions Ui.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
2.2. Model predictive control 17
Assumption 2.11. The utility functions Ui are increasing, strictly concave, andtwice continuously differentiable.
We are now ready to state the existence of primal optimal and dual optimal inthe following propositions.
Proposition 2.12. [30] Under the assumption 2.11 and the constraints (2.1) - (2.2)which are convex and compact, the optimal value of the (primal) Problem 2.2 is equalto the optimal value of the Lagrangian dual problem (2.5). Additionally, the dualvariables λ(k) always exist.
Proposition 2.13. [30] The supply levels xi(λ) for each agent i may not be primaloptimal. However, when λ∗ � 0 is dual optimal, then the supply level xi(λ
∗) isprimal optimal provided by the complementary slackness related to the grid capacityconstraints is obeyed and the supply level xi(λ
∗) is feasible given a convex solution setXi.
2.2 Model predictive control
To handle all technical constraints, including their predictions, while incorporatingnew measurement of c(k) over multiple time steps, we propose to use a modelpredictive control (MPC) scheme. The scheme is widely used for optimizing theoperation in power and gas networks. See the implementations, e.g., [70], [57],[25], [98], [105].
The rest of the section is organized as follows. We briefly review the principle ofthe MPC operation in Section 2.2.1. We then formulate Problem 2.9 and Problem2.10 in the MPC framework in Section 2.2.2. With the formulation, the agents areallowed to adapt their supply levels based on, e.g., expected fluctuations in the gridand expected changes in their supply profiles.
2.2.1 Principle of operation
With the MPC framework, the utility is maximized over a prediction horizon T
given the estimates of future conditions in the grid and the expected changes inthe supply profiles. From the sequence of optimal solutions that covers the timehorizon T , only the optimal solution of the first step is applied. At the next timestep the optimization problem is re-solved and, again, only the solution of thefirst step is implemented. We refer the reader to, e.g., [35],[80], [82], for thedetailed explanation of the MPC framework. The operation of the framework isschematically illustrated in Figure 2.1.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
18 2. Preliminaries
k Horizon
Predic�on horizon
k+N
u
k+1 Horizon
Past Future
Predic�on horizon
k+N+1
u
Op�mal sequence
Past Future
Op�mal sequence
Only the first input is implemented
Figure 2.1: Schematic illustration of the MPC operation.
2.2.2 Model predictive control for distributed coordination
In this subsection, we formulate Problem 2.9 and Problem 2.10 in the MPC frame-work by taking into account the predicted changes in the supply levels xi(k) and inthe grid capacity c(k).
Let τ = k, . . . , k+ T be a new time variable introduced to differentiate betweenthe system time step k and prediction time steps. Problem 2.9 can be rewritten inthe MPC framework as

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
2.2. Model predictive control 19
Problem 2.14.
max
k+T∑τ=k
Ui(xi(τ))− λ(τ)xi(τ)
subject to xi(τ)|τ=k = x(k) and xi(τ) ∈ Xi for all τ = k, . . . , k + T .
The hat-notations are specified to distinguish the prediction parameters fromthe system model parameters. The maximization is performed at each time k
taking into account the new measurements of xi(k) and λ(k). Over optimal controlsequence xi(τ)|k+T
τ=k obtained, only the first optimal solution xi(τ)|τ=k = x(k) isimplemented to calculate the utility function. Next, the horizon is shifted onesample τ = k + 1, . . . , k + 1 + T and the corresponding maximization problem isre-solved. Again, only the solution of the first step is implemented.
By taking into account the new measurements of c(k) and aggregated supplylevels
∑ni=1 xi(k) from all agents i = 1, . . . , n, the grid operator updates its dual
variables by
λr+1(k) = λr(k) + αr(k)(
n∑i=1
xri (k)− c(k)). (2.7)
Only the first optimal dual variable λ(τ)|τ=k = λ(k) is shared to agents connected.The distributed MPC algorithm is summarized in Algorithm 2.
Algorithm 2: Distributed MPC for supply coordination
Result: Find xi(k) at each time k of the distributed MPC scheme.initialize λr=0(τ) � 0;for τ = k, . . . , k + T do
while all termination criterion are not met dofor agent i = 1, . . . , n do
solve Problem 2.14, given λr(τ);endEach agent i publishes xr
i (τ) to the grid operator;The grid operator updates the dual variables λr(τ) according to theupdates 2.7 and shares the variables to all agents.
endendimplement xi only for τ = k.
The updates in (2.7) are done synchronously, as the supply levels xri (k) and dual
variables λr(k) are iteratively calculated at the same time iteration r ∈ {1, 2, 3 . . .}.Practically, the agents and grid operator may not have access to a common clock

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
20 2. Preliminaries
to synchronize their updates. Thus, in the following section we implement anasynchronous setting when solving Problem 2.2 in a distributed fashion.
2.3 Asynchronous implementation
In this section, we incorporate the asynchronous exchange information on thedistributed supply coordination provided Subsection 2.2.2. The correspondingalgorithm has been proposed in [76]. It is however important to note that theauthors in [76] treats the single product for each agent, proposes the supplycoordination algorithm for multiple agent, and proves the convergence of thealgorithm in a static environment. In this thesis, we further develop the algorithmfor treating agents owning multiple products and decentralized storage devices.Our proposed algorithms particularly take into account dynamics of the storagedevices.
In fact, the algorithm is the same as that in Section 2.2.2, except that it is basedon its current estimates of the latest exchanged information [76]. The algorithmsfor asynchronous supply coordination done by the grid operator and each agent iare shown in Subsections 2.3.1 and 2.3.2, respectively. For notational convenience,we only consider a time τ .
2.3.1 Asynchronous supply coordination by a grid operator
We now state the algorithm for asynchronous supply coordination by a grid operatoras is given in [76].
For each time τ , let Ro ⊆ {1, 2, . . .} be a set of internal times at which the gridoperator adjusts its dual variables λ based on its current knowledge of aggregatedsupply levels from all agents i = 1, . . . , n.
1. At times r ∈ Ro, the grid operator computes an estimate of the complementaryslackness l(r) according to
l(r) = c−n∑
i=1
xi(r)
= c−n∑
i=1
r∑r′=r−ro
ai(r′, r) · xi(r
′), (2.8)
with∑r
r′=r−roai(r
′, r) = 1 ∀r representing the weighting factor of the totalsupply levels received by the grid operator.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
2.3. Asynchronous implementation 21
2. It then updates its dual variables λ(r) based on
λ(r + 1) = [λ(r)− γl(r)]+, (2.9)
where γ > 0 is a sufficiently small step size and [z]+ denotes the positive partof z, i.e., max{0, z}.
3. Otherwise, at times r /∈ Ro, the dual variables λ(r) is unchanged, resulting inλ(r + 1) = λ(r), r /∈ Ro.
Proposition 2.15. (Optimality conditions, [30]) The optimization experienced bythe grid operator is attained if and only if λ(r)l(r) = 0.
The grid operator practically terminates the updates of its dual variables λ(r)when
• the difference between its consecutive updates λ(r) is within a bound ξ, i.e.|λ(r)− λ(r − 1)| � ξ, and
• the estimate l(r) � 0.
2.3.2 Asynchronous supply coordination by agent i
In this subsection, we state the algorithm for asynchronous supply coordination byagent i, which is given in [76]. It is important to note that the authors in [76] treatthe single product for each agent i. Furthermore, they prove the convergence of thealgorithm in a static environment. Based upon the algorithm which is explainedin this subsection, we will develop algorithms for the asynchronous distributedsupply coordination of agents owning multiple products and decentralized storagedevices in Chapters 4-6. Our proposed algorithms take into account dynamics ofthe storage devices.
Let Ri ⊆ {1, 2, . . .} be a set of internal times within time step τ at which agenti updates its supply level xi(r) for the grid operator by optimizing Problem 2.14subject to xi(τ)|τ=k = x(k) and xi(τ) ∈ Xi.
1. At times r ∈ Ri, agent i estimates dual variables λi(r) by
λi(r) =
r∑r′=r−ro
bi(r′, r) · λ(r′), (2.10)
with∑r
r′=r−robi(r
′, r) = 1 indicating the weighting factor of dual variablesreceived by agent i.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
22 2. Preliminaries
2. Based on the estimated dual variables λi(r), agent i solves Problem 2.14subject to xi(τ)|τ=k = x(k) and xi(τ) ∈ Xi and therefore obtains
xi(r) = xi(λi(r)). (2.11)
3. Otherwise, at times r /∈ Ri, xi(r + 1) = xi(r).
The iterations are terminated by agent i when the successive updates xi(r) arewithin a bound ξi, i.e. |xi(r)− xi(r − 1)| � ξi.
Remark 2.16. At least, there exist two policies for weighting the exchanged infor-mation, defined by ai(r
′, r) and bi(r′, r):
• For some r ∈ {r − ro, . . . , r}, only the last received supply levels and dualvariables are used to estimate l(r) and λi(r), respectively. It means thatai(r
′, r) = bi(r′, r) = 1 if r′ = r and 0 otherwise.
• Only the average over the latest m received supply levels and dual variablesare used to estimate l(r) and λi(r), respectively, given by ai(r
′, r), bi(r′, r) > 0
for r′ = r −m+ 1, . . . , r and 0 otherwise.
We use the following assumptions on the objective functions Ui and on the timebetween the successive updates of the supply levels and the dual variables.
Assumption 2.17. U ′′i � − 1
α , where α is a positive constant.
Assumption 2.18.
The time between the consecutive updates is upper bounded by ro for both theupdates of dual variables and supply levels.
We are now ready to establish the convergence of the asynchronous distributedsupply coordination in the following theorem.
Theorem 2.19. [76] Given any initial supply levels xi(0), any initial dual variablesλ(0) � 0 and suppose that assumptions 2.11, 2.17, and 2.18 hold, the error in thedual variable estimation Δλ(r), the deviation in the supply level estimation Δxi(r),and the error in the gradient estimation Δl(r) all converge to zero as r → ∞ for allagents i = 1, . . . , n.
2.4 Concluding remarks
In this chapter, we have reviewed the constrained utility maximization solved ina distributed fashion using the dual decomposition approach combined with the

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
2.4. Concluding remarks 23
gradient projection method in Section 2.1. We have reviewed the MPC frameworkto anticipate the future events when maximizing the utility function subject to thenew measurements of the operational constraints of each agent i in Section 2.2.Furthermore, in Section 2.3 we have described how an asynchronous informationexchange is generally implemented when solving the problem in a distributedfashion.
We will use the distributed algorithm provided in Section 2.2 for supply coordi-nation of heterogeneous energy producers, i.e. Power-to-Gas facilities, embedded inmultiple energy grids in Chapter 3. In Chapter 4, we will extend the asynchronoussupply coordination given in Section 2.3 for dynamic utility maximization prob-lems. Under certain assumptions on the revenue functions, on the time between thesuccessive updates, and on the time at which the algorithms reaches the optimal so-lutions, we will prove the convergence of the algorithms in that chapter. In Chapter5, we will implement the distributed asynchronous algorithm presented in Chapter4 for the supply and consumption coordination of a community consisting of biogasprosumers. Specifically, we will show how the distributed coordination among themis done through bidirectional communication, allowing them to optimally utilizetheir resource allocation. In Chapter 6, we will extend the asynchronous distributedcoordination provided in Section 2.3 for state information exchange in a networkof prosumers. The state information mainly contains knowledge on the imbalancebetween prosumers’ supply and demand. Furthermore, the prosumers are embed-ded in the multiple energy grids. Hence, the distributed coordination aims both atminimizing the imbalance between supply and demand within the community andat maximizing the prosumers’ utility under their technical constraints.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 3Supply coordination of agents coupled to multiple
energy grids

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 3
Supply coordination of agents coupled tomultiple energy grids
In this chapter, we consider hydrogen and renewable electricity from Power-to-Gas(PtG) facilities supplied to multiple energy grids, including: a gas grid, mobilityindustrial grid, and power grid. The PtG facilities are equipped with hydrogenbuffers and fuel cells. The problem setting of the considered systems is introducedin Section 3.1. The supply levels from the PtG facilities must be coordinated withthe corresponding energy grid operators in order to avoid overloading grids whilemaximizing the expected profit of the PtG facilities. The details and technicalconstraints of the PtG facilities and the capacity constraints on the energy gridsare given in Section 3.2. To include these constraints when deciding the supplylevels locally, the distributed MPC (DMPC) method reviewed in Subsection 2.2.2 isemployed. We provide the distributed supply coordination in Section 3.3. Based onour work presented in [18] and [12], the fairness and its practical implementationsof the associated distributed algorithm as well as simulation results are given inSection 3.4. Finally, concluding remarks of the chapter are given in Section 3.4.
3.1 Problem setting
As introduced in Chapter 1, PtG is an increasingly popular alternative energy storageoption. In PtG facilities, an electrolyzer converts excess power into hydrogen [27].The produced hydrogen is potentially useful for mixing with natural gas in thegas distribution grid, and for usage in the mobility industrial grid. By including ahydrogen storage device, the PtG facility can be regarded as a means for energystorage. The stored hydrogen can then later be used as mentioned above, or bereconverted into electrical energy using a fuel cell. The produced electricity can besold to a low-voltage power grid hence creating some revenue for the owners ofPtG facilities.
It is desirable that the number of PtG facilities equipped with hydrogen buffersand fuel cells increases to support the integration of renewable energy into theenergy grids. However, the capacity of energy grids has limitations hence restrictingthe aggregated supply levels from the PtG facilities. This restriction is governedby a distribution system operator (DSO) of each energy grid, as the DSO has the

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
26 3. Supply coordination of agents coupled to multiple energy grids
responsibility to manage and operate the energy distribution grid. The responsibilitymakes the DSO act when overloading is detected [97]. It may modify its distributioncharge for energy transport and system services utilized by PtG facilities, therebyinducing the PtG facilities to modify their supply levels.
The contributions of this chapter are twofold. Firstly, recent studies, e.g., [11],[62], [100], [95], [68], deal with a single-grid perspective in developing a supplycoordination framework. In contrast, we deal with a multiple-grid perspective atwhich each PtG facility has more than one type of energy to produce and sell tomultiple energy grids. Therefore, it is necessary to take into account all possiblecurrent (and predicted) limitations in the associated energy grids. With thissetting, it is natural to formulate the optimization problem in the MPC frameworkreviewed in Section 2.2. The framework allows the PtG facilities to anticipate thefuture conditions of the energy grids hence maximizing their expected profit for agiven time horizon without overloading the energy grids. Secondly, we examinebidirectional communication between energy grid operators and PtG facilitiesusing the approach reviewed in Subsection 2.2.2. We proposed a real-time supplycoordination algorithm that automatically interconnect the PtG facilities and theDSOs to search for the optimal energy supply levels for each PtG facility and theoptimal distribution charge to be advertized by the operators.
In fact, there are distributed algorithms which are in some sense outperformingthe projected gradient method, such as the accelerated gradient method proposedin [54]. However, the gradient method is the simplest way we can implementto perform bidirectional communication between PtG facilities and the multipleenergy grid operators. In the distributed setting, we provide a pricing mechanismby the DSOs of the energy grids to ensure that the grid capacity constraints areobeyed. The price, the so-called distribution charge, is time-variant and uniformfor all PtG facilities. Nevertheless, our framework offers the possibility for the PtGfacilities to have different characteristics, and thus their profits may be different aswell.
3.2 Agents with energy converters and gas storagedevices
We first develop a model of a renewable energy generator equipped with a PtGfacility. Consider the PtG facility with a hydrogen buffer and a fuel cell. Theschematic description of the PtG facility is presented in Figure 3.1. The numberof technical constraints of the PtG facility and a role of the gas grid, the mobilityindustrial grid, and the power grid connected to PtG facilities are described inSection 3.2.1. We assume that the strategy of PtG facilities is to maximize theirrevenue and to minimize the associated cost (thereby maximizing their (expected)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.2. Agents with energy converters and gas storage devices 27
profit), as formulated in Section 3.2.2.
3.2.1 Modeling
We consider regular measurements from a PtG facility i ∈ {1, . . . , n}, defined bya time k ∈ {1, . . . ,K}. Let vi(k) > 0 be the surplus power generation, defined asa difference between the electricity usage of the loads vload(k) ∈ R+, the poweroutput from the conventional power generator vconv(k) ∈ R+ and the poweroutput from the renewable energy source vrenew(k) ∈ R+ at time k, given byvi(k) = vconv,i(k)+vrenew,i(k)−vload,i(k). Strictly speaking, at time k it is possiblethat vi(k) < 0 which indicates energy shortage in the power grid and vi(k) = 0
when there is perfect matching between total power demand and the aggregatedsupply from both the conventional power and renewable energy generator.
Gas grid
Mobility industry
Power grid
Solar
Wind
Other renewable
Electrolyzer
Fuel cell Storage
Flaring
Figure 3.1: An overview of the Power-to-Gas concept, adapted from [55].
The main task of a PtG facility is to convert the surplus power generation, i.e., ifvi(k) > 0, into a gaseous energy carrier, i.e. hydrogen and synthetic methane. Weonly focus on the produced hydrogen, not on the synthetic methane, in this casestudy due to broad usage of hydrogen. Here we use a proton exchange membrane(PEM) water electrolyzer to convert the excess power to hydrogen because of itshigh efficiency, i.e. 70% [36].
The produced hydrogen pi(k) ∈ R+ is dependent on the electrolyzer capacityci, the electrolyzer efficiency ηi, the maximum heating value hi, and the minimumfraction of the maximum capacity li at which the electrolyzer needs to operate,given by

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
28 3. Supply coordination of agents coupled to multiple energy grids
pi(k) =
⎧⎪⎪⎨⎪⎪⎩
ci·ηi
hiif vi(k) � ci
else
{vi(k)·ηi
hiif vi(k) � lici
0 if vi(k) < lici..
This equation simply defines the produced hydrogen at
pi(k) ∈ 0 ∪ [pmin,i, pmax,i], (3.1)
at time k, where pmin,i = lici·ηi
hiand pmax,i = ci·ηi
hi. Note that the produced
hydrogen pi(k) is not controllable, as it depends mainly on the intermittent sourcevi(k).
As mentioned above, the PtG facility may contribute to increasing the sustain-ability of a gas grid and to satisfying hydrogen demand of a mobility industrialgrid by injecting amounts of hydrogen gi(k) ∈ R+ and yi(k) ∈ R+ to the gasgrid and to the mobility industrial grid, respectively. Alternatively, some producedhydrogen can be stored in a hydrogen storage device, denoted by us,i(k) ∈ R+, tobe reconverted into electrical energy using a fuel cell, to be sold to the gas grid,and/or to be injected to the mobility industrial sector at a later time.
We choose a PEM fuel cell due to its substantially lower cost per kWh of thepower output than that of other fuel cells. In addition, the PEM fuel cell has areasonably high efficiency, 40− 60% [63]. In practice, the power output from thePEM fuel cell depends on the efficiency of the fuel cell, the amount of electricalenergy required per kilogram hydrogen, and the density of hydrogen, which aretogether characterized by a constant parameter ε. Given amount of stored hydrogenwi(k) ∈ R+, the electrical energy produced by the fuel cell is characterized byei(k) =
1εwi(k).
Remark 3.1. It is assumed that there is no excessive demand on the power gridwhen hydrogen is produced by the electrolyzer of PtG facilities, i.e. pi(k) > 0
implies that there is no excessive demand on the power grid which is denoted byei(k) = 0.
We assume that there is no leakage of the stored hydrogen over time. Moreover,hydrogen is assumed to be stored at normal temperature and normal pressure,which are respectively 20◦C and 1 atm [47]. Given the initial value of storedhydrogen in the storage device zi(0), we define the dynamics of available hydrogenzi(k) in the hydrogen buffer of PtG facility i by a linear model, given by
zi(k + 1) = zi(k)− ρtut,i(k) + ρsus,i(k), (3.2)
where ut,i(k) ∈ R+ refers to the amounts of hydrogen which are taken from the

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.2. Agents with energy converters and gas storage devices 29
storage device, whereas ρt and ρs are respectively the efficiency of discharging andcharging the storage device. We set us,i(k) as a controllable input for the storagedevice.
Remark 3.2. It can be argued that there are three reasons why a PtG facility storeshydrogen at a time k. Firstly, it is desirable to store some hydrogen in the storagedevice when the current energy prices are low compared to the estimates of futureenergy prices. Secondly, it is necessary to store the produced hydrogen when thereis no more demand that needs to be satisfied. However, it can only be done if thereis remaining space in the storage device. Thirdly, it is natural to store the remainingproduced hydrogen when the corresponding variable production cost to provideenergy is higher than the associated revenue.
In fact, the available hydrogen in the storage device has an upper limit deter-mined by the storage capacity of the device Si of PtG facility i , given by
0 � zi(k) � Si. (3.3)
Hence, we have upper limits on ut,i(k) and us,i(k) given by uti(k) � zi(k)ρt
and
usi(k) �Si−zi(k)
ρs, respectively.
When the surplus hydrogen that needs to be stored exceeds the remaining spacein the storage device, some amount of hydrogen fi(k) ∈ R+ needs to be flared.This amount can be seen as a dump load, enabling the total energy supplied byPtG facility i to match the sum of its production and energy taken from its storagedevice, given by
gi(k) + yi(k) + ei(k) + us,i(k) + fi(k) = pi(k) + ut,i(k). (3.4)
We determine all variables stated in (3.4) in a volume unit, i.e. Nm3 meaning thateach m3 is considered at normal condition with the temperature of 20◦C and thepressure of 1 atm. The energy injected to the gas grid, the mobility industrial sector,and the power grid per PtG facility i are bounded by
Xi = {xi(k)|xi � xi(k) � xi} (3.5)
for all x = g, y, e and all k ∈ {1, . . . ,K}, where xi and xi are respectively the lowerand upper bounds of energy injected in the energy grid x ∈ {g, y, e}, where gridg, y, e are the gas grid, the mobility industrial grid, and the power grid, respectively.The constraints (3.5) represent constraints per PtG i for supply, i.e. valve limitations,etc.
Let n PtG facilities be embedded in the same gas grid, the same mobilityindustrial grid, and the same power grid. We refer to such a group of renewableenergy producers, later called as agents, as a community. The community aims at

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
30 3. Supply coordination of agents coupled to multiple energy grids
maximizing its profit from the produced energy without overloading the energygrids.
Overload of the energy grids is defined as a situation in which the total energysupply from PtG facilities exceeds the maximum allowable energy injected in theenergy grids. In order to avoid an overload, we have the following constraints:
n∑i=1
xi(k) � cx(k) ∀x = g, y, e. (3.6)
Remark 3.3. The constraints (3.6) are in fact a nonlinear function. Particularly, inthe power grid they are dependent on the distribution factor and nodal injection[65],[60]. We however assume these to be external signals, thus allowing us towrite the constraint as a time-varying signal.
With the constraints (3.6), the DSO of an energy grid x ensures that theaggregated supply levels from all PtG facilities will not exceed its grid capacitycx. More formally on the constraints (3.6), if
∑ni xi(k) � cx(k), then x = (xi, i ∈
{1, . . . , n}) is feasible.As stated above, we assume that the strategy of PtG facilities is to maximize
their revenue and to minimize their associated costs. We formulate these twoobjectives in the following subsection.
3.2.2 Problem formulation
Let px(k) ∈ R+ be the selling price signal in an energy grid x at time k. Let cx,i be atime-invariant cost to provide energy to the associated energy grid x. Furthermore,we let cqx,i be time-invariant cost of transmission losses of energy injected to theenergy grid x. Each PtG facility may have different responses to the same sellingprices px(k) for all x = g, y, e, as it may not have the same variable productioncosts cx,i and the same costs of transmission losses cqx,i for each PtG facility i.We can mathematically capture the different responses of diverse PtG facilities tovarying selling price signals px(k) by using the concept of utility function borrowedfrom the microeconomics discipline [77]. For each PtG facility i ∈ {1, . . . , n}, itscorresponding revenue function Ui(gi(k), yi(k), ei(k)) depends on the amount ofenergy injected in the gas grid gi(k), in the mobility industrial grid yi(k), and inthe power grid ei(k), characterized by
Ui(gi(k), yi(k), ei(k)) = Ug,i(k) + Uy,i(k) + Ue,i(k), (3.7)
where Ux,i(k) = (px(k)− cx,i)xi(k)− cqx,ix2i (k), for all x = g, y, e. We are inspired
by [71] in choosing quadratic forms associated with the time-invariant costs of

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.2. Agents with energy converters and gas storage devices 31
transmission losses cqx,i. Furthermore, we assume that the revenue functions fulfillthe following properties:
• Increasing revenue function The PtG facilities are always willing to supply theenergy grids, if possible, to maximize their revenue. It is mathematicallydefined by ∂Ui
∂x > 0, resulting in
0 � xi(k) <px(k)− cx,i
2cqx,i(3.8)
for all x = g, y, e. We can interpret Qx = ∂Ui
∂x as marginal revenue.
• Strictly concave revenue function That is, the PtG facilities have non-increasingmarginal revenue function, given by ∂2Ui
∂x < 0 for all x = g, y, e at each timek, implying that cqg,i, cqy,i, cqe,i > 0.
From (3.2), Remark 3.2, and (3.4), the control decisions
gi(k), yi(k), ei(k), ut,i(k), us,i(k)
influence the amount of hydrogen available in the storage device zi(k) and theamount of hydrogen that needs to be flared fi(k). The surplus hydrogen which areboth flared and stored in the storage device causes additional cost for PtG facility i,defined by
Ci(k) = cf,ifi(k) + cop,izi(k), (3.9)
where cf,i and cop,i denote the flaring cost and opportunity cost for each Nm3
hydrogen flared and stored in the storage device, respectively. Notice that the PtGfacilities flare their surplus hydrogen if there is no more space remaining in theirstorage devices. We are inspired by [86] and[94] in choosing a convex function, inparticular a linear function, associated with the opportunity cost. We thus simplydefine the opportunity cost by multiplying the available hydrogen in the storagedevice zi(k) by an interest rate cop,i, i.e. cop,i · zi(k). It is calculated repeatedly ateach time k. Other ways of determining the opportunity cost, e.g., as proposed in[29], can be adopted for our model. It is based on micro-economic theory wherethe opportunity cost is not necessarily a linear function of the available inventoryin the storage device.
It is desirable for PtG facility i to maximize its revenue function (3.7) andto minimize its associated costs (3.9) in order to maximize its profit Vi(k) =
Ui(k) − Ci(k) without exceeding the grid capacities. To do so, the PtG facilitiesneed to coordinate their supply bids to the energy grid operators in order to avoidoverloading grids. We will provide the supply coordination in the following section.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
32 3. Supply coordination of agents coupled to multiple energy grids
Here we define the supply coordination, performing the revenue maximization(3.7) and the cost minimization (3.9) while obeying both the grid constraints (3.6)and local technical constraints (3.1)-(3.5) for all i ∈ {1, . . . , n} and k ∈ {1, . . . ,K}.We formulate the optimization problem in a model predictive control (MPC) schemeas we aim at taking into account the predictions of all individual constraints of eachPtG facility and the predictions of all possible limitations in the associated energygrids. For extensive explanation of the MPC scheme, refer to e.g., [82], [80], [78],and [35].
Let us consider n PtG facilities embedded in the same gas grid, the same mobilityindustrial grid, and the same power grid. In the MPC scheme, all information aboutthe objective functions, states, and predictions of hydrogen production of all PtGfacilities are globally available and governed by a central unit in an effort to solvethe optimization problems. We define the optimization problem as
maxk+T∑τ=k
n∑i=1
Vi(τ), (3.10)
subject to the prediction models of (3.1)-(3.6) and given initial conditions denotedby
zi(τ)τ=k = zi(k), (3.11)
as well as additional constraints
x(τ) � xi(τ) � xi(τ) ∀x = g, y, e (3.12)
where τ = k . . . ,K + T is a new time variable introduced to differentiate betweenthe system time k and the prediction time τ . The hat-notations are specified todistinguish the prediction parameters from the system model parameters. Wheninjecting energy to all energy grids at time k is not beneficial for PtG facilities, theproblem (3.10) becomes a minimization problem with respect to zi(k) and fi(k).
Define Gi = {gi(τ)|gi � gi(τ) � gi(τ)}, Yi = {yi(τ)|yi � yi(τ) � yi(τ)}, andEi = {ei(τ)|ei � ei(τ) � ei(τ)}. We have the following assumption on the profitfunction.
Assumption 3.4. The profit function Vi(τ) is increasing and strictly concave onthe intervals Gi,Yi, Ei.
Notice that all constraints stated in (3.1)-(3.5) are compact and convex, whereasthe objective function follows Assumption (3.4). Hence, the problem is a convexoptimization problem with one optimal solution at most [95].
As mentioned previously, when we solve the problem (3.10) centrally, weassume that there exists a central unit making decisions for all PtG facilities. The

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.3. Distributed Supply Coordination 33
central unit only applies the first of the planned actions, i.e. g1(τ), . . . , gn(τ),y1(τ), . . . , yn(τ), e1(τ), . . . , en(τ), ut,1(τ), . . . , ut,n(τ), and us,1(τ), . . . , us,n(τ). Itthen repeats the optimization for next time instance.
Due to the competitive nature of energy providers, i.e. PtG facilities, it mayhappen that they are not willing to share their information to their competitors.We therefore aim at solving the problem (3.10) in a distributed fashion. In this way,each PtG facility can locally manage their hydrogen allocation based on its ownlocal information, yet it is still necessary to coordinate its supply bids to the DSOsof the energy grids in order to avoid overloading grids. To obtain the distributedsolutions, the problem (3.10) will be reformulated using a dual decompositionapproach combined with a projected gradient method. The approach and methodhave been reviewed in Subsection 2.1.1. The reformulated problem will containtwo-layer optimization problems experienced by each PtG facility and each DSOof the energy grids. With the reformulation, the computations are scalable toimplement.
3.3 Distributed Supply Coordination
Recall that the objective function (3.10) is separable for each supply level
gi(τ), yi(τ), ei(τ)
and each PtG facility i. However, the supply levels are coupled by the predictionsof constraints (3.6). As we aim at developing a distributed supply coordination, theproblem (3.10) is decoupled using a dual decomposition approach combined witha projected gradient method. Our work is closely related to the work presented in[95] and [31]. However, they only deal with a single-grid perspective in developinga distributed coordination framework. Here we deal with a multiple-grid perspec-tive at which each PtG facility has five controllable inputs with three of them arecoupled. Moreover, the PtG facilities are equipped with gas storage devices. It istherefore necessary to take into account the dynamics of the storage devices. As aresult, our work leads to more complex practical implementations of the algorithm,which will be described later. With the algorithm, we provide some insight on howthe distributed approach can be realized in the energy markets and how the dualvariables associated with three coupling inequality constraints (3.6) react to eachother.
To decouple the problem (3.10), we first derive a dual function of that problem.Let λg(τ), λy(τ), λe(τ) be the projected dual variables associated with the predictionmodel of the grid capacities (3.6) at prediction time τ . It is common in some recentliterature to mention the dual variables as shadow prices, such as in [68] and [85].

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
34 3. Supply coordination of agents coupled to multiple energy grids
Define the Lagrangian function of the problem (3.10)
L(g(τ), y(τ), e(τ), λg, λy, λe)
= maxK+T∑τ=k
V (τ)− λg(τ)
(n∑
i=1
gi(τ)− cg(τ)
)
− λy(τ)
(n∑
i=1
yi(τ)− cy(τ)
)− λe(τ)
(n∑
i=1
ei(τ)− ce(τ)
) (3.13)
where
g(τ) = {g1(τ), . . . , gn(τ)},y(τ) = {y1(τ), . . . , yn(τ)},e(τ) = {e1(τ), . . . , en(τ)}.
Notice that V (τ) =∑n
i=1 Vi(τ) in (3.10) is separable in gi(τ), yi(τ), ei(τ), re-sulting in
max
k+T∑τ=k
n∑i=1
(Vi − λg(τ)gi(τ)− λy(τ)yi(τ)− λe(τ)ei(τ)
)
−∑
x=g,y,e
λx(τ)cx(τ) =
k+T∑τ=k
n∑i=1
max(Vi(τ)− λg(τ)gi(τ)− λy(τ)yi(τ)− λe(τ)ei(τ)
)
−∑
x=g,y,e
λx(τ)cx(τ).
The dual function of problem (3.10) is therefore defined by
m(λg, λy, λe) = supL(g(τ), y(τ), e(τ), λg, λy, λe). (3.14)
Hence, we obtain the dual of the problem (3.10) specified by
minimize m(λg(τ), λy(τ), λe(τ))
subject to λg(τ), λy(τ), λe(τ) � 0.(3.15)
Remark 3.5. We can interpret the projected dual variables λg(τ), λy(τ), λe(τ) asthe distribution charges for energy transport and system services utilized by PtGfacilities. The charges experienced by DSOs fluctuate to ensure that the aggregatedsupply levels from the PtG facilities are not exceeding the grid capacities [96].

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.3. Distributed Supply Coordination 35
The problem stated in (3.15) is convex. As the projected dual variablesλg(τ), λy(τ), λe(τ) � 0, any feasible solutions of λg(τ), λy(τ), λe(τ) � 0 provideupper bounds of the optimal values of problem (3.10), given by
m(λg(τ), λy(τ), λe(τ)) �n∑
i=1
Vi(τ),
for any feasible g(τ), y(τ), e(τ) and any λg(τ), λy(τ), λe(τ). Additionally, it isconfirmed in [30] that if the primal problem is a strictly concave utility functionand all constraints are linear, the duality gap does not appear and the dual variablesexist.
In order to solve problem (3.15), we use the gradient method for updatingλg(τ), λy(τ), λe(τ). At every time τ , the dual variables are initially set at non-negative values, i.e. λrg=0
g (τ), λry=0y (τ), λre=0
e (τ) � 0 and are updated by
λrx+1x (τ) = λrx
x (τ) + αrxx (τ)
(N∑i
xrxi (τ)− cx(τ)
)(3.16)
for all x = g, y, e, where rx is an iteration index within each time step τ , whereasαrxx (τ) is time-variant step size for each iteration rx. The iterations are terminated
within a time step τ when the consecutive updates of λrxx (τ) stay within the bounds
ξx and when the estimates of the grid capacities (3.6) are met.
GasDSO
IndustryDSO
PowerDSO
PtG 1 PtG n
Figure 3.2: Proposed interactions among PtG facilities and multiple energy DSOs at eachiteration rg, ry, re within a time step τ . Given distribution charges λrg
g (τ), λryy (τ), λre
e (τ) � 0,PtG facilities exchange their supply bids grgi (τ), y
ryi (τ), erei (τ) to the energy DSOs. The DSOs
then modify their distribution charges based on the aggregated supply levels from all PtGfacilities.
Remark 3.6. The updates (3.16) are assumed to be done synchronously, i.e. thesupply level and distribution charge are iteratively calculated based on updatedinformation at each iteration rg, ry, re within a time τ , i.e. rg = ry = re.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
36 3. Supply coordination of agents coupled to multiple energy grids
The corresponding algorithm is sketched in Algorithm 3 and illustrated in Figure3.2. Bidirectional communication among the DSOs and the PtG facilities is capturedin the proposed algorithm. The algorithm is distributed and applicable for anynon-negative distribution charge initialization. The algorithm will first help thePtG facilities to calculate the optimal supply level for a grid which has the mostappealing selling price. The optimal supply levels from the PtG facilities which areinjected to a particular grid will then affect the optimal supply levels injected toother energy grids, as the produced hydrogen pi(k) and the stored energy zi(k) tosupply energy to all energy grids are limited.
Notice that given λrgg (τ), λ
ryy (τ), λre
e (τ) � 0, the profit maximization of PtGfacility i is locally solved, i.e.
Li = max
K+T∑τ=k
Vi(τ)− λrgg g
rgi (τ)− λry
y yryi (τ)− λre
e erei (τ) (3.17)
subject to the prediction model of constraints (3.1)-(3.5) and (3.11)-(3.12).
Algorithm 3: Distributed supply coordination
Result: Find gi(k), yi(k), ei(k), ut,i(k), us,i(k) at each time k of the DMPCscheme.
initialize λrg=0g (τ), λ
ry=0y (τ), λre=0
e , zi(τ) � 0;for τ = k, . . . , k + T do
while all termination criterion are not met doGiven the updated distribution charges λrg
g (τ), λryy (τ), λre
e , PtG facilityi = 1, . . . , n do their local optimization:
max Vi(τ)− λrgg gi(τ)− λry
y yi(τ)− λree ei(τ)
s.t. the prediction model of constraints (3.1)-(3.5) and (3.11)-(3.12).PtG facilities publish their supply bids grg (τ), yry (τ), ere to theassociated DSOs.Given the updated supply bids, DSOs update the distribution chargesλrgg (τ), λ
ryy (τ), λre
e using according to (3.16).DSOs share their distribution charges to PtG facilities.
endendimplement gi, yi, ei, ut,i, us,i only for τ = kcalculate zi(k), fi(k) and the realistic profit Li(k)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.4. Results 37
3.4 Results
3.4.1 Fairness and practical implementations
Recall Li in (3.17) representing the realistic profit which is obtained by PtG facilityi, given λ = [λ
rgg ; λ
ryy ; λre
e ]. Recall the assumption on the profit function Vi(τ) statedin Assumption (3.4). We assume that its realistic profit Li is also increasing andstrictly concave on the interval of the feasible sets to ensure that the PtG facilitiessupply energy to the grids when it is beneficial.
Let hi = [g∗i , y∗i , e
∗i ] be the unique maximizer of Li. As well known, the Karush-
Kush-Tucker (KKT) conditions provide necessary and sufficient conditions foroptimality of a constrained convex optimization problem [32]. Based on theKKT conditions, a unique maximizer hi exists where ∂Li
∂hi= 0. More formally,
hi(λ) = argmax{Li}.
Fairness is related to allocating the resource in a way that takes into accountthe individual capability of each PtG facility to satisfy the demand of the energygrids. Our definition comes from [76]. When we constrain V (τ) stated in (3.10)to be logarithmic functions, we obtain the so-called proportional fairness which isintroduced in [44].
In our work, DSOs provide uniform distribution charge for all PtG facilitiesconnected to their grids. When two PtG facilities a and b have the same parametervalues involved in their revenue function (3.7) and in their cost function (3.9), theywill have equal supply level to be injected to the same grids, i.e. ha(λ) = hb(λ).Obviously, PtG facilities need to ensure that they have sufficient available hydrogenin their systems, i.e. zi(τ) and pi(τ).
The PtG facilities may however react differently to the uniform distributioncharge. It is due to the fact that each PtG facility may have different costs associatedwith producing and transporting some amount of energy to each energy grid andmay have the capability to inject different amount of energy than others.
Remark 3.7. In practice, DSO x may provide a different distribution charge λx,i(τ)
to each PtG facility i. For a simple case, let us define λx(τ) =∑n
i=1 λx,i(τ) for allx = g, y, e. Within our problem setting, we still obtain unique solutions for the profitmaximization of each PtG facility i as stated in (3.17), given any value λx,i(τ) � 0
for all x = g, y, e. The solutions jointly solve the global maximization problem(3.10). The optimality conditions can be obtained by using Karush-Kuhn-Tucker(KKT) conditions [32]. They are summarized in the following statement.
Given the initial values λrg=0g,i , λ
ry=0y,i , λre=0
e,i � 0 which may be different for eachPtG facility i, the unique solutions for the supply levels g∗i , y
∗i , e
∗i must satisfy the

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
38 3. Supply coordination of agents coupled to multiple energy grids
KKT conditions:
V ′x(
n∑i=1
x∗i ) =
n∑i=1
λ∗x,i (3.18)
n∑i=1
λ∗x,i(
n∑i=1
x∗i − cx) = 0, (3.19)
for all x = g, y, e.An arising question is then how DSOs determine such diverse distribution
charges such that they are fair for each PtG facility i. The proportional fairness asproposed in [44] may help to do so. It however results in different implementations,since we calculate the optimal solutions x∗
i for each PtG facility i in a different wayas in [44].
It is worthwhile to note that the dual problem (3.15) is equivalent to
minλg
minλy
minλe
m(λg(τ), λy(τ), λe(τ)) (3.20)
Within each time cycle of the DMPC scheme, the sequence of the minimizationproblems initially depends on the estimated selling price and demand level of theenergy grids. If the gas grid has the most appealing expected selling price anddemand level among others, minλg
will be first solved. It is due to the fact thateach PtG facility aims at maximizing its projected profit.
As a consequence, the total energy supply from all PtG facilities exceeds thecapacity of the gas grid. Therefore, the algorithm results in the increase of λrg
g (τ),resulting in a decrease of grgi (τ). When the increase of λrg
g (τ) makes PtG facilitiesunwilling to supply their energy to the corresponding grid, they start to offer theirenergy to another grid which has the second highest estimated selling price anddemand levels, and so on. If the predicted grid constraints (3.6) are met and theconsecutive updates of distribution charges are within bounds ξg, the gas grid DSOwill stop iterations by publishing the optimal distribution charge λ∗
g(τ) to all PtGfacilities. The optimal supply levels from the PtG facilities which are injected tothe gas grid will affect the optimal supply levels injected to other energy grids asthe produced hydrogen pi(k) and the stored energy zi(k) to supply energy to allenergy grids are limited.
3.4.2 Simulation results
In this section, we first perform numerical testings of the distributed algorithm pre-sented in Section 3.3. All technical constraints of PtG facilities and the grid capacityconstraints in Section 3.2 are taken into account when solving the optimization

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.4. Results 39
problem. In addition, the performance of the distributed algorithm is evaluatedby applying it for different initial distribution charges and various number of PtGfacilities embedded in the energy grids.
We consider three renewable energy generators equipped with the PtG facilities.We assume that they are embedded in the same gas grid, the same mobilityindustrial grid, and the same power grid. We use realistic electricity load patternsfrom [4], the capacity of a conventional power generator from [74], and thecapacity of installed wind turbines from [64] to provide the excess power pattern.The excess power output pattern is shown in Figure 3.3, representing five typicaldays in the beginning of July 2012. This time horizon is divided into 15-minutesamples, resulting in 480 samples.
� ��� ��� ��� ����
���
���
����
����
�
�
������������������ �
��
���������������� �
Figure 3.3: Excess power output of a wind farm for typical five days in the beginning ofJuly 2012. The wind farm was in Groningen, the Netherlands. [66]
We implement a prediction horizon of T = 4, which means that each PtG facilitycan take the estimates of the selling price signals and the demand patterns of thenext one hour into account. The selling price signals and demand patterns aregathered from [9] and presented in Figure 3.4 and Figure 3.5.
The parameter values involved in the revenue function (3.7) and the costfunction (3.9) are given in Table 3.1, as defined in [66]. We set the time-variantstep sizes below, inspired by a non-summable diminishing step size proposed in[33], i.e. αrx
x (k) = px(k)·α√rx
for all x = g, y, e, with α=5e-5 at iteration numbersrg, ry, re. We include the selling price signals in these dynamic step sizes to obtainfaster convergences when the selling price signals increase. We define the boundsξg, ξy, ξe at 1e-6 for each time τ to terminate the iterations. A QP-solver fromGurobi 5.6.3 with YALMIP embedded in Matlab 2014a is used to find the optimalsolutions.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
40 3. Supply coordination of agents coupled to multiple energy grids
� ��� ��� ��� ���
�����
�����
�����
�����
�����
�
������
�������������� ���
���
����������� ������
� ��� ��� ��� ������
���
���
���
����
���������
�������
�������������� ���
���
����������� ������
Figure 3.4: Selling price patterns of the low-pressure gas grid, the mobility industrial grid,and the power grid [9].
� ��� ��� ��� ����
����
����
����
����
����
�
� ������
���������
�
��������� ������
� ��� ��� ��� ����
��
��
���
���
� ��������
���
���������
�
Figure 3.5: Demand patterns of the low-pressure gas grid, the mobility industrial grid, andthe power grid [10].
The initial distribution charges are set at zero. Given data shown in Figure 3.3,Figure 3.4 and Figure 3.5, the whole demand on the gas grid and the mobilityindustrial grid, which is represented as their grid capacities, are fully satisfied. Incontrast, there is unsatisfied demand on the power grid, as depicted in Figure 3.6.It is natural since the selling price of the power grid presented in Figure 3.4 is thelowest one, whereas its demand shown in Figure 3.5 is considerably higher thanthat of other energy grids.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.4. Results 41
Table 3.1: The parameter values in the objective function [66]
Parameter Value Parameter Value Parameter Value
cg 0.189 cqg 1e-4 cop 2.76e-5cy 0.224 cqy 1e-4 α 55e-5ce 0.01 cqe 1e-5 cf 1.0e-4ηt 1 ηs 1 S 500
� ��� ��� ��� ���
�
����
����
����
�
�
������������
�
Figure 3.6: Unsatisfied demand in the power grid, with given excess power output in Figure3.3, the selling price pattern in Figure 3.4, and the demand pattern in Figure 3.5.
Figure 3.7 shows the optimal distribution charges during k = 1, . . . , 480, gener-ated by our proposed algorithm. We see that the distribution charge in the mobilitygrid λy(k), green line, has the highest level. It is due the fact that the sellingprice of the mobility industrial grid is the most appealing price, that makes all PtGfacilities aim at satisfying as much demand as possible in the mobility industrialgrid. The associated distribution charge is therefore sufficiently increased from zerolevel to ensure that the corresponding grid constraint is obeyed. It is shown as wellin Figure 3.7 that the distribution charge in the gas grid λg(k), black line, variesperiodically per day. This phenomenon corresponds to the fact that the sellingprice on the gas grid also varies periodically each day, as respectively depicted inFigure 3.5. It can be concluded from Figure 3.7 that the higher selling price anddemand level of an energy grid compared to others, the higher distribution chargeis needed.
By comparing Figure 3.7 next to Figure 3.6, we see that when there is unsatisfieddemand on the power grid, the distribution charge in the gas grid λg(k), black line,and the charge in the mobility industrial grid λy(k), green line, intensely decrease.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
42 3. Supply coordination of agents coupled to multiple energy grids
� ��� ��� ��� ���
����
����
����
����
����
�
�
������������� ������������
�� �����
��
���������������� �
Figure 3.7: Optimal distribution charges
For instance, on the interval k = 233, . . . , 287 the unsatisfied demands on the powergrid are up to 447 kNm3, resulting in intensely decrease of λg(k) and λy(k) up tozero level. It may interpret a reaction of the DSOs of the gas grid and the mobilityindustrial grid on the current situation of another energy market, i.e. power grid.
The evolution of the distribution charges and the aggregated supply levels onthe gas grid at time k = 1 with two different initial values of the distributioncharges are shown in Figure 3.8 and Figure 3.9. We set the capacity of the gas gridat 28 Nm3. As shown in Figure 3.8, the zero initial distribution charge makes allPtG facilities aim at injecting their hydrogen to the gas grid hence the overloadinggrid is detected by the associated DSO. The DSO then increases its distributioncharge thus inducing PtG facilities to reduce their supply level. In contrast, theinitial distribution charge set at 0.2 e/Nm3 makes the PtG facilities unwillingto inject their energy to the gas grid. It is shown in Figure 3.9. As a result, thecorresponding DSO decreases its distribution charge with zero as a lower bound.
We also address the issues related to the initialization of distribution charges andthe scalability of the algorithm. As shown in Table 3.2, for 3 facilities we simulatedtwo different initial values of distribution charges, i.e. zero initial distributioncharges which are denoted by λr=0(k) = 0 and the initializations based on theoutcome of the previous time step which are defined by λr=0(k) = λ∗(k−1). As canbe expected, the latter initialization is better than just crudely taking zero as initialdistribution charge. Using the initialization based on the previous time step, westudy scalability towards 3, 30, and 50 PtG facilities. In our simulation, the mobilityindustry has the highest selling price of hydrogen. More iterations are needed whenthe number of PtG facilities embedded in the mobility industry is getting larger.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.4. Results 43
λr=0(k), n = 3 n, λr=0(k) = λ∗(k − 1)
0 prev 30 50
Gas DSO 36 17 39 86Industry DSO 19 8 75 173
Power DSO 2 2 2 2
Table 3.2: The average number of iterations (r) with different initial distribution chargesλr=0 and diverse number of PtG facilities n.
Conversely, the mean number of iterations needed in the power grid remains thesame and is the lowest number (r = 2), as the power grid has the lowest sellingprice compared to others’. The energy demand in the power grid will therefore befulfilled by PtG facilities after all demand in the gas grid and the mobility industrialgrid are satisfied. The number of iteration thus provides some insight on howdifficult the bidding process between PtG facilities and the energy grid operators is.A larger number of iteration mean that the time it takes to compute the optimalsolutions is longer, and hence it affects the size of the time steps that can be taken.For implementation, with many facilities there is therefore a trade-off between thetime steps we take and the number of PtG facilities embedded in the energy grids.
� � �� �� ��
����
���
����
���
����
�
�����������
��������������� �������
����������
��
�
���
���
��
���� �����������
���������
������
�
Figure 3.8: The evolution of distribution charge and aggregated supply bids of 3 PtGfacilities when the initial distribution charge is zero.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
44 3. Supply coordination of agents coupled to multiple energy grids
� � �� �� �����
�����
����
�����
����
�����
���������������� ��������������
�
������������
�
��
��
��
Figure 3.9: The evolution of distribution charge and aggregated supply bids of 3 PtGfacilities when the distribution charge is initially set at 0.2 e/Nm3.
3.5 Concluding remarks
In this work, we have presented how supply from PtG facilities equipped withhydrogen storage devices and fuel cells can be coordinated, such that their technicalconstraints and the grid constraints are obeyed when maximizing their expectedprofit. We have proposed an optimal distribution pricing algorithm in Section IVin order to do the coordination in a distributed manner. Two-layer optimizationproblems are involved in the algorithm. The low level consists of the individualoptimization problem (3.17) solved to maximize PtG facilities’ profit, whereas thehigh level is due to the requisite in updating the distribution charges to ensurethat the grid capacity constraints are met. The distributed algorithm proposed inSection IV caters to the distributed nature of the energy generators in a community.
Our finding that the DSO of an energy grid will immediately react on the currentsituation of other energy grids is supported by our numerical testings. Our findingthat a good initialization of the distribution charges at every optimization canreduce the computational load is confirmed by our observations. In general, thedistribution charge intensely decreases, i.e. up to zero level, when large amounts ofdemand on other energy grids are not satisfied. Conversely, the distribution chargeincreases when overloading grid is detected.
We terminate the iterations of distribution charges when the predicted gridcapacity constraints (3.6) are met and when the consecutive updates of
λrgg (τ), λry
y (τ), λree (τ)
stay within sufficiently small bounds ξg, ξy, ξe. With these settings, the proposed

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
3.5. Concluding remarks 45
algorithm has fairly slow convergence rate. Alternatively, we can set the maximumallowable number of iterations to terminate the iterations while sub-optimality andstability are still guaranteed, as proposed in [31] and [51].
As stated in Remark 3.6, PtG facilities may not have a common clock to syn-chronize their updates. Their communication may have time-varying delays. Asa consequence, they may optimize their problems based on outdated informa-tion. We will therefore involve this asynchronous scheme in the distributed supplycoordination in the following chapter.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 4Asynchronous supply coordination in multiple energy
grids

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 4
Asynchronous supply coordination inmultiple energy grids
This chapter is based on our works presented in [16] and [14]. We study adistributed asynchronous supply coordination for controlling the supply levels ofdynamic agents which are embedded in multiple energy grids. Equipped withconverters, the dynamic agents are allowed to offer multiple types of products tothe corresponding grids which have limited capacities. The formulation is basedon the utility maximization framework, which is used to characterize the supplylevels of each product. We first propose a distributed asynchronous algorithm in astatic environment as presented in [16] and then we extend the algorithm for thedynamic case, based on dual decomposition combined with the gradient projectionmethod reviewed in Subsection 2.1.1.
The chapter is organized as follows. In Section 4.1, we start by presenting theproblem setting and theoretical background for the optimization problem. Next, wesolve it in a distributed fashion. We then add asynchronous exchange informationbetween the agents and the energy grid operators on the corresponding distributedalgorithm, for both the static case and dynamic case presented in Sections 4.2 and4.3, respectively. To illustrate the algorithm and to study the practical implementation, the algorithms are applied for a setup consisting of Power-to-Gas facilitiesembedded in a gas grid, mobility industrial grid, and power grid. This case study ispresented in Section 4.4. Finally, concluding remarks are presented at the end ofthe chapter.
4.1 Problem setting
In many practical situations, the grid operators and agents may update the dis-tribution charges and supply levels, respectively, at different times due to somecommunication delay or simply because they do not have access to a common clock.It results in asynchronous updates in which the operator and agents compute theiroptimal values based on outdated information.
Under the assumptions that A) the agents’ utility function are increasing, strictlyconcave, and twice differentiable, that B) the curvatures of utility functions arebounded away from zero, and that C) the consecutive updates done by the grid

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
48 4. Asynchronous supply coordination in multiple energy grids
operator and agents are upper bounded, the convergence of an asynchronousapproach in a static environment has been provided in [76]. See, e.g., [34],[37],for applications of the asynchronous approach in wireless sensor network. However,these studies deal with a single-grid situation when each agent has one controllableinput and has some freedom to choose which sequence of paths in the grid to usebetween source and destination.
In contrast, we here consider a number of dynamic agents producing multipleproducts and embedded in multiple grids. Each product is characterized by a utilityfunction of its supply levels and the agents’ goal is to maximize the aggregatedutility. Each product has a particular path to transfer to the corresponding grid.Additionally, due to technical constraints the grids have limited capacities. In thissetting, we assume that the present decisions may affect the future condition of theagents’ systems. Hence, it is necessary to take into account the agents’ dynamicswhen solving the utility maximization problems.
We provide an algorithm for distributed asynchronous coordination betweengrid operators and agents which is given as follows: each grid operator deter-mines whether its grid overloads based on the current estimates of the aggregatedsupply levels from all agents. The distribution charge is updated as a function ofexcess supply, i.e. the distribution charge increases from its initial value duringoverloading. The updated distribution charge is shared with the agents. Based onthe current estimates of the latest distribution charges received from multiple gridoperators, the agents calculate their optimal values. The values are provided to thecorresponding grid operators. Under such a scheme, we allow agents to solve theirutility maximization problems locally and asynchronously, yet some coordinationwith grid operators is still necessary to satisfy the grid capacity constraints.
In fact, all aforementioned studies are applied for communication networks.Some recent studies, e.g. [45] and [21], adopted real-time congestion control ofcommunication networks for the energy distribution grid. Both the congestioncontrol problem in the energy distribution grids and in communication networkscan be tackled by using distributed optimal control methods. Additionally, both ofthem are designed to handle controllable and uncontrollable loads.
Our result on the convergence of the distributed asynchronous supply coor-dination algorithm in a static case is shown in [16], under the aforementionedassumptions A-C and the assumption that there are always sufficient sources toproduce the products. Additionally, in this chapter, by considering the agents’ dy-namics when iteratively calculating the optimal values, we prove the convergenceof the distributed asynchronous coordination algorithm in a dynamic environment.The proof is done under the assumptions A-C and an additional assumption on thetime at which the algorithm reaches the optimal solutions.
As mentioned above, the agents exchange iteratively and asynchronously theircontrollable inputs, i.e. supply levels, to the corresponding grid operators when

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.1. Problem setting 49
searching for their optimal supply levels. We will extend the method and algorithmproposed in this chapter for also exchanging the agents’ states in Chapter 6. Inparticular, we consider the scenario that the agents build a community. They sharetheir states, i.e. imbalance level between their local supply and demand, with eachother hence enabling them to minimize the total imbalance of the community.
4.1.1 Agents embedded in multiple grids
We start by putting the problem formulated in Chapter 3 in a standard utilitymaximization given in Section 2.1. Consider a set I = {1, . . . , n} of agents. Eachagent i ∈ I owns a source which produce hi(k) units at the time instance k ∈{1, . . . ,K}. From the source hi(k), agent i generates a set of products. Eachproduct of agent i with the supply rate of xm,i(k) is supplied to a particular gridm ∈ M = [1, . . . , q]. Hence, m is an index and M is the set of indices for thedifferent grids. Each grid only accepts one type of product, thus the index sets forthe products and grids are the same, i.e. M . Moreover, each grid m has a limitedcapacity cm(k). Therefore, the grid capacity limits the supply level of the agents asfollows:
n∑i=1
xm,i(k) � cm(k). (4.1)
There is a minimum and maximum amount xm,i(k), xm,i(k) ∈ R+ that agent ican deliver due to the capacity of its transmission lines. These constraints are givenby
Xm,i = {xm,i(k)|xm,i � xm,i(k) � xm,i}. (4.2)
The source hi(k) and the bounds specified in (4.1)-(4.2) may result in themismatch between supply and demand that agents need to mitigate by usinglocal energy storage devices. Assume that agent i has 100% efficiency to convertthe source hi(k) to any product xm,i(k) for all m ∈ M . When the source hi(k)
exceeds the total production∑q
m=1 xm,i(k), agent i stores the surplus sourcehi(k) −
∑qm=1 xm,i(k) in its local storage device. Otherwise, agent i discharges
some source from the storage device. Assuming that there is leakage of the storedsource over time with the associated parameter δi ∈ (0, 1), the dynamics of theavailable source in the storage device denoted by zi(k) is given by
zi(k) = (1− δi)zi(k − 1) + ρi
(hi(k − 1)−
q∑m=1
xm,i(k − 1)
)(4.3)
where ρi is the efficiency of (dis)charging the storage device of agent i. Suppose

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
50 4. Asynchronous supply coordination in multiple energy grids
that the maximum capacity of the storage device is denoted by Si, the availablesource in the storage device is limited by
Zi = {zi(k)|0 � zi(k) � Si(k)}. (4.4)
Note that hi(k) is an external input. When there is no more remaining space forsurplus source in the storage device, i.e. hi(k)−
∑qm=1 xm,i(k) > Si − zi(k), the
excess source, i.e. hi(k)−∑q
m=1 xm,i(k) > 0, is injected into a grid which is not inM . We here assume that there is no cost/revenue associated with this injection.
For each agent i, we characterize the supply rate xm,i(k) of the product deliveredto grid m by (Um,i(k),Xm,i). Agent i receives a revenue Um,i(k) when it suppliesits product to grid m at a level of xm,i(k), which satisfies the constraints (4.1)-(4.2).The revenue is modeled as a utility function borrowed from the microeconomicsdiscipline [77].
As briefly stated earlier, the control objective is to decide the supply levelsxm,i(k) for all agents i ∈ I and all products m ∈ M so as to:
Problem 4.1.
maxxm,i
n∑i=1
q∑m=1
Um,i(k) (4.5)
subject to (4.1)-(4.4) for all agents i ∈ I and all products m ∈ M .
Remark 4.2. Note that our problem stated in Problem 4.1 looks similar to theproblem shown in [76]. However, we consider the case that each agent canoffer multiple types of products to the corresponding grids hence owning multiplecontrollable inputs. Furthermore, each product at a level of xm,i(k) has a particularpath to transfer to the associated grid. We also extend the problem stated in [76]to the dynamic case by including the constraints (4.3)-(4.4) in the optimizationproblem.
We further denote the total revenue of agent i as Ui(k) =∑q
m=1 Um,i(k). Weuse the following assumptions on the total revenue functions Ui(k).
Assumption 4.3. The total revenue functions Ui are increasing, strictly concave,and twice continuously differentiable on the solution sets Xm,i for all i = {1, . . . , n}and m = {1, . . . , q}.
Assumption 4.4. U”i (k) �
⎛⎜⎜⎝
− 1α1i
0 0
0. . . 0
0 0 − 1αqi
⎞⎟⎟⎠, where Ui”(k) is the Hessian
matrix of Ui(k) and α1i, . . . , αqi are positive constants.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.1. Problem setting 51
Note that U”i (k) is a diagonal matrix. Under assumption 4.3, agent i only sells
its product to grid m with the supply rate of xm,i(k) when it gains a revenueUm,i(k). Assumption 4.4 gives us a condition guaranteeing that the curvatures ofUi(k) are bounded away from zero for all xm,i ∈ Xm,i with m = 1, . . . , q.
There exists a unique maximizer xm,i(k), i.e. the solution can however beinfeasible, for all agents i ∈ I and products m ∈ M , as the objective function Ui(k)
follows the conditions 4.3 and 4.4 and all constraints (4.1)-(4.4) are compact [76].The objective function of Problem 4.1 is separable for each agent i and for each
product at a level of xm,i. However, the constraints (4.1) make agents coupled witheach other. Hence, solving Problem 4.1 requires coordination among the agents.
Due to the competitive nature of agents, it is highly unlikely that they are willingto share all information, including their states and other local information, to others.Therefore, in the following section we solve problem 1 in a distributed manner inwhich each agent i can locally make a decision on its supply levels xm,i(k) for allproducts m ∈ M , based on its local information and some coordination with thegrid operators.
4.1.2 Distributed supply coordination
To develop the distributed supply coordination, we start with decomposing Problem4.1 for each agent i using the dual decomposition method. We apply gradientiterations and the stopping criterion to reach the optimal solutions.
When it is clear from the context, we leave out the dependence on k for nota-tional convenience. Let us define the Lagrangian function L(x1,i, . . . , xq,n, λ1, . . . , λq)
of (4.1) by
L(x1,i, . . . , xq,n, λ1, . . . , λq) =
n∑i=1
Ui −q∑
m=1
λm(
n∑i=1
xm,i − cm),
where λm is the associated dual variables of coupling constraints (4.1).The objective function of the dual problem is then given by
D(λ1, . . . , λq) = maxx1,i,...,xq,n
L(x1,i, . . . , xq,n, λ1, . . . , λq)
=n∑
i=1
Wi(λ1, . . . , λq) +
q∑m=1
cmλm, (4.6)
where
Wi(λ1, . . . , λq) = maxx1,i,...,xq,i
Ui(k)−q∑
m=1
λmxm,i, (4.7)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
52 4. Asynchronous supply coordination in multiple energy grids
representing the exact revenue function of agent i, given the dual variablesλ1, . . . , λq. Hence, we obtain the dual problem specified by
Problem 4.5.
minλ1(k),...,λq(k)�0
maxxm,i∈Xm,i,zi∈Zi
L(x1,i, . . . , xq,n, λ1, . . . , λq). (4.8)
subject to the constraints (4.2)-(4.4).
The optimality condition for the problem can be obtained directly by usingKarush-Kuhn-Tucker (KKT) theorem [32].
Proposition 4.6. The optimal values of supply levels xm,i(k) in Problem 1 mustsatisfy
U ′m(xm,i(k)) = λm(k) ∀i ∈ I, (4.9)
λm(k)(n∑
i=1
xm,i(k)− cm(k)) = 0 ∀m ∈ M, (4.10)
with λm(k) � 0.
Condition (4.9) shows that the marginal revenue for adding a unit of xm,i(k)
is equal to the optimal value of the corresponding dual variable λm(k). Condition(4.10) requires the additional terms in the objective function (4.6), which isλm(k)(
∑ni=1 xm,i(k)− cm(k)), to be zero at optimality, in order to ensure that the
optimal solutions of Problem 4.1 is the same as the ones of Problem 4.5.To solve Problem 4.5, we use the gradient projection method. The dual variable
λm(k) is initially set at some non-negative value, i.e. λr=0m (k) � 0, and updated
based on
λr+1m (k) =
[λrm(k) + γ
(n∑i1
xrm,i(k)− crm(k)
)]+
, (4.11)
where γ > 0 is the step size and r is the internal iteration index for each time k.The iterations are terminated when the successive updates of the dual variable iswithin a small bound ξm, i.e. |λr
m(k)− λr−1m (k)| � ξm.
The primal variable xrm,i(k) is calculated by maximizing the functions Wi in
(4.7), subject to the individual constraints of agent i. One may approximate theoptimal value of the primal variable by using the gradient projection method [30].
Remark 4.7. The dual variable λm can be interpreted as the distribution charge forthe transport and system services which are utilized by agents connected to gridm. Thus, in what follows we call the dual variables the distribution charges. With

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.1. Problem setting 53
the gradient iterations (4.11), the charges are adjusted so as to avoid overloadinggrids.
Remark 4.8. Solving Problem 4.5 results in two layered optimization problem. Thelower level is to calculate the optimal values of xm,i(k) for all m = 1, . . . , q whichis done locally by agent i, given distribution charges λ1(k), . . . , λq(k). The higherlevel is to update the distribution charges which is done by grid operator m, giventhe aggregated supply rates
∑ni=1 xm,i(k).
Next, we show that using the gradient projection method (4.11), the solutionsof Problem 4.5 converges to the solutions of Problem 4.1.
We define the distribution charge vector λ = [λ1, . . . , λq]T . From assumptions
4.3-4.4, we have the following two basic properties.
Lemma 4.9. Suppose that assumption 4.3 holds. The dual objective function D(λ) isconvex, lower bounded, and continuously differentiable.
Proof. The dual objective function D(λ) is convex and lower bounded due to theproperties of its primal objective function. As the primal objective function isincreasing and strictly concave while all constraints are convex, the duality gapdoes not exist. Hence, the Lagrangian function L(x1,i, . . . , xq,n, λ1, . . . , λq) has aunique maximizer for each controllable input at a level of xm,i. From [30], itis known that D(λ) is continuous differentiable if its Lagrangian function has aunique maximizer.
Now, define βi(λ) =
⎡⎢⎣
β1,i(λ1) 0 0
0. . . 0
0 0 βq,i(λq)
⎤⎥⎦ where
βm,i(λm) =
⎧⎨⎩
1−U”
m,i
if U ′m,i(xm,i) � λm,i � U ′
m,i(xm,i)
0 otherwise,(4.12)
for all m = 1, . . . , q. From assumption 4.4, for all λm � 0 we have
0 � βi(λ) � αi < ∞, (4.13)
where αi =
⎡⎢⎣
α1,i 0 0
0. . . 0
0 0 αq,i
⎤⎥⎦ . Furthermore, let B(λ) be the q×q matrix specified

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
54 4. Asynchronous supply coordination in multiple energy grids
by
B(λ) =
⎡⎢⎣
∑ni=1 β1,i 0 0
0. . . 0
0 0∑n
i=1 βq,i
⎤⎥⎦ .
Let xm,i(λm) be the unique maximizer in (4.7). According to KKT theorems, wehave λm = U ′
i(xm,i(λm)) for all m ∈ M , where U ′i(xm,i) denotes the derivatives
of Ui(xm,i). Hence, with U′−1i are the inverse function of U ′
i , we obtain xm,i =
[U′−1i (λm)]
xm,ixm,i
, where [j]ba = min{max{j, a}, b} are the projection on the intervala and b.
Lemma 4.10. [[76], Lemma 2] Suppose that assumption 4.3 holds. The Hessian ofthe dual objective function D(λ) is given by ∇2D(λ) = B(λ).
Define α := maxm=1,...,q
∑ni=1 βm,i with n agents embedded in grid m. We are
now ready to prove the zero duality gap between the optimal solutions of Problem4.1 and the ones of Problem 4.5.
Theorem 4.11. Given that 0 � γ � 2α , assumptions 4.3-4.4 hold, and any initial
distribution charges λr=0m (k) � 0. Then the optimal solutions of Problem 4.1 are the
same as the optimal solutions of Problem 4.5.
Proof. From Lemma 4.9, the dual objective function of Problem 4.5 is convex,lower bounded, and continuously differentiable. As B(λ) is a symmetric matrix,we obtain ||B(λ)||1 = ||B(λ)||∞. Therefore
||B(λ)||2 � ||B(λ)||∞
= max
(n∑
i=1
β1,i, . . . ,
n∑i=1
βq,i
).
As α be the upper bound of∑n
i=1 βm,i among m = 1, . . . , q, we have ||B(λ)||2 �α. Then, by following similar steps to prove Theorem 9.19 in [92], we have||∇D(λa) −∇D(λb)||2 � α||λa − λb||2, where λa, λb � 0. The rest of the proof isomitted because it is identical to the proof of Theorem 1 in [76].
The updates in (4.11) are done synchronously, as the supply levels and distri-bution charges are iteratively calculated at the same time iteration r ∈ {1, 2, 3 . . .}.Practically, the agents and grid operators may not have access to the same clockto synchronize their updates. Thus, in the following section we implement anasynchronous setting when solving Problem 4.1 in a distributed fashion.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.2. Asynchronous supply coordination in a static case 55
4.2 Asynchronous supply coordination in a static case
In this section, we incorporate asynchronous implementation in the distributedsupply coordination proposed in Section 4.1. We develop the associated algorithmin a static environment, assuming that there is always sufficient source hi + zi toproduce products at the supply rate of xm,i, for all m ∈ M . In other words, weare only interested in considering the problem of a particular time k and do notinclude the dynamics of the stored source stated in (4.3). In Section 4.3, we willextend the results by incorporating the dynamics of available source.
In the distributed asynchronous supply coordination, the computation is thesame as that in Section 4.1, except that it is based on its current estimates of thelatest collected values. The associated algorithm is inspired by [76]. The authors in[76] consider a single product for each producer i, while here we take into accountq products which correspond to q different utility functions, i.e. U1,i(k), . . . , Uq,i(k),for each agent i.
We use the following assumption on the time between the successive updates.
Assumption 4.12. The time between the consecutive updates is upper boundedby ro for both the updates of distribution charges and supply bids.
4.2.1 Asynchronous supply coordination by grid operator m
For each time instant k, let Rm ⊆ {1, 2, . . .} be a set of internal times at which gridoperator m adjusts its distribution charge λm based on its current knowledge ofaggregated supply levels from all agents i = 1, . . . , n.
1. At times r ∈ Rm, grid operator m computes an estimate lm(r) according to
lm(r) = cm −n∑
i=1
xm,i(r)
= cm −n∑
i=1
r∑rr=r−ro
am,i(rr, r) · xm,i(rr), (4.14)
with∑r
rr=r−roam,i(rr, r) = 1 ∀r representing the weighting factor of the
total supply bids received by grid operator m.
2. It then updates its distribution charge λm(r) based on
λm(r + 1) = [λm(r)− γlm(r)]+, (4.15)
where γ > 0 is a sufficiently small step size.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
56 4. Asynchronous supply coordination in multiple energy grids
3. Otherwise, at times r /∈ Rm, the distribution charge λm(r) is unchanged,resulting in λm(r + 1) = λm(r), r /∈ Rm.
Proposition 4.13. (Subsection 5.5.3 in [32] and Proposition 5.1.1 in [30]) Notethat n denotes the number of agents embedded in grid m and λ∗
m be a dual variable.Then x∗
m,1, . . . , x∗m,n are global maximum of the primal problem (1) if and only if
x∗m,1, . . . , x
∗m,n are feasible, x∗
m,i = argmaxxm,i∈Xm,i Ui(λ∗m), and λ∗
ml∗m = 0.
The grid operator m practically terminates the updates of its distribution chargeλm(r) when
• the difference between its consecutive updates λm(r) is within a bound ξm,i.e. |λm(r)− λm(r − 1)| � ξm, and
• the estimate lm(r) � 0.
4.2.2 Asynchronous supply coordination by agent i
Let Ri ⊆ {1, 2, . . .} be a set of internal times within time instant k at which agenti updates its supply level xm,i(r) for all grid operators m ∈ M by optimizingProblem (4.7) subject to boundary conditions xm,i(r) ∈ Xm,i and the assumptionon sufficient source to produce all products, i.e.
∑qm=1 xm,i(r) � hi(r) + zi(r) �∑q
m=1 xm,i(r).
1. At times r ∈ Ri, agent i estimates distribution charges λm,i(r) for all gridoperators m ∈ M by
λm,i(r) =
r∑rr=r−ro
bm,i(rr, r) · λm(rr), (4.16)
with∑r
rr=r−robm,i(rr, r) = 1 indicating the weighting factor of distribution
charges received by agent i.
2. Based on the estimated distribution charges λm,i(r) for all grid operatorsm ∈ M , agent i solves the optimization problem (4.7) subject to boundaryconditions xm,i(r) ∈ Xm,i and therefore obtains
xm,i(r) = xm,i(λm,i(r)). (4.17)
3. Otherwise, at times r /∈ Ri, xm,i(r + 1) = xm,i(r) for all grid operatorsm ∈ M .
The iterations are terminated by agent i when the successive updates xm,i(r)
are within a bound ξm,i, i.e. |xm,i(r)− xm,i(r − 1)| � ξm,i.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.2. Asynchronous supply coordination in a static case 57
Remark 4.14. Problem 4.5 can be rewritten as
minλ1
. . .minλq
D(λ1, . . . , λq). (4.18)
When the agents may attain higher revenue by selling its product to a particulargrid m than other grids, the agents will first search for the optimal value of itscorresponding supply level. Strictly speaking, at each time r ∈ Ri agent i will solveone of its controllable inputs. In this case, we can directly use the proof of Theorem2 in [76] to establish the convergence of our proposed distributed asynchronousalgorithm.
We aim at generalizing the case for all possible values of Um,i. In particular,we deal with the case when all grids m ∈ M give the same revenue to agent i.Hence, agent i has no priority in calculating xm,i(r) at each iteration r ∈ Ri. Inother words, agent i optimizes its controllable inputs at a supply level of xm,i(r)
for all grids m ∈ M at the same time r.
Define the error in the distribution charge estimation as
Δλi(r) = [Δλ1,i(r), . . . ,Δλq,i(r)]T
with Δλm,i(r) = |λm,i(r) − λm,i(r)|, the deviation in the supply level estimationas Δxi(r) = [Δx1,i(r), . . . ,Δxq,i(r)]
T with Δxm,i(r) = |xm,i(r)− xm,i(r)|, and theerror in the gradient estimation as Δl(r) = [Δl1(r), . . . ,Δlq(r)]
T with Δlm(r) =
|lm(r)− ∂D∂λm
(λ(r))|.The following theorem establishes the convergence of the proposed distributed
asynchronous supply coordination in the static case.
Theorem 4.15. Given the knowledge that
q∑m=1
xm,i(r) � hi(r) + zi(r) �q∑
m=1
xm,i(r),
any initial supply levels xm,i(0), any initial distribution charges λm(0) � 0 andsuppose that assumptions 4.3, 4.4, and 4.12 hold, the error in the distribution chargeestimation Δλi(r), the deviation in the supply level estimation Δxi(r), and the errorin the gradient estimation Δl(r) all converge to zero as r → ∞, for all i ∈ I andm ∈ M .
Proof. Besides Lemmas 4.9 and 4.10, the following 7 lemmas are needed to proveTheorem 4.15. Their proofs are omitted as they use similar steps to prove Lemmas4-6 in [76].

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
58 4. Asynchronous supply coordination in multiple energy grids
Let
π(r) = [π1(r), . . . , πq(r)]T
= [λ1(r + 1)− λ1(r), . . . , λq(r + 1)− λq(r)]T.
Given any λ ∈ Rq×1+ , define ui(.; λ) : R
q×1+ → R+ by
ui(ε; λ) = U′−1i (εT λ) = U
′−1i (
∑r
εrλr) (4.19)
Suppose all assumptions 4.3, 4.4, and 4.12 hold and define
l(r) =
⎡⎢⎣
l1(r) 0 0
0. . . 0
0 0 lq(r)
⎤⎥⎦ .
Lemma 4.16. For all r, l(r)π(r) � − 1γπ
2(r), where π2(r) = [π21(r), . . . , π
2q ]
T .
Lemma 4.17. There exists a constant A1 > 0 such that, for all λ � 0 and all j, wehave jT∇2D(λ)j � 4nA1||j||2.
Define λm(r) as the upper bound of∑
r λm(r), for all m = 1, . . . , q.
Lemma 4.18. For any distribution charge λm,
0 �[
∂ui
∂ε1,r(ε; λ1), . . . ,
∂ui
∂εq,r(ε; λq)
]T� αi
[λ1(r), . . . , λq(r)
]T.
Define now
U′−1i (λm,i(r)) = ui(εm,rr (r); λm(r)), (4.20)
U′−1i (λm,i(r)) = ui(1m,rr (r); λm(r)), (4.21)
where λm,i(r) and λm,i(r) are the estimated and exact distribution charges for gridm, respectively, and
1m,rr (r) =
{1 if rr = r,
0 otherwise,(4.22)
andεm,rr (r) = bm,i(rr, r), (4.23)
for all m = 1, . . . , q.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.2. Asynchronous supply coordination in a static case 59
Define
ΔU′−1i (λ(r)) =
[ΔU
′−1i (λ1(r)), . . . ,ΔU
′−1i (λq(r))
]Twhere ΔU
′−1i (λm(r)) = |U ′−1
i (λm,i(r))− U′−1i (λm,i(r))| and
πabs(rr) = [πabs,1(rr), . . . , πabs,q(rr)]T
with πabs,m(rr) = |πm(rr)|.
Lemma 4.19. ΔU′−1i (λ(r)) � αi
∑r−1rr=r−ro
πabs(rr), ∀r.
Define ΛU′−1i (λ(r)) =
[ΛU
′−1i (λ1(r)), . . . ,ΛU
′−1i (λq(r))
]Twith ΛU
′−1i (λm(r)) =
|U ′−1i (λi
m(r))− U′−1i (λi
m(τ))|.
Lemma 4.20. ΛU′−1i (λ(r)) � αi
∑r−1rr=τ πabs(rr), ∀r.
Lemma 4.21. There exists a constant A2 > 0 such that Δl(r) � nA2αi
∑r−1rr=r−2ro
πabs(rr)
for all r, where αi is the upper bound of αi.
Lemma 4.22. Given step size γ that is sufficiently small, for all r we have
D(λm(r + 1)) � D(λm(0))− (1
γ− 2nA1 − nA2αmi)
r∑τ=0
|πm(τ)|2,
for all m = 1, . . . , q.
As stated in assumption 4.3, we have the primal functions Ui which is increasing,strictly concave, and twice differentiable. Its dual function D(λ) is thereforedecreasing, convex, lower bounded, and continuously differentiable (Lemma 4.9).The optimal distribution charge λ∗
m is found when
limr→∞D(λm(r))−D(λm(r − 1)) = 0. (4.24)
Hence, from Lemma 4.22 we obtain
limr→∞ |πm(r)| = 0. (4.25)
We are now ready to prove Theorem 4.15. According to (4.16) and (4.25), forall agents i = 1, . . . , n we have the estimated and exact distribution charges given

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
60 4. Asynchronous supply coordination in multiple energy grids
by
|λm(r)− λm(r)| = |r∑
rr=r−ro
bmi(rr, r)λm(rr)− λm(r)|
� maxr−ro�rr�r
|λm(rr)− λm(r)|
� maxr−ro�rr�r
r−1∑τ=rr
|πm(τ)|
�r∑
rr=r−ro
|πm(rr)|.
Hence,
limr→∞ |λm(r)− λm(r)| = 0. (4.26)
As we have defined the error in distribution charge estimation by Δλi(r) =
[Δλ1,i(r), . . . ,Δλq,i(r)]T with Δλm,i(r) = |λm,i(r)−λm,i(r)|, we obtain limr→∞ Δλ(r) =
0.
We have the estimated value for controllable inputs xm,i(r) defined by
xm,i(r) = xm,i( ˆλm,i(r)), (4.27)
where
xm,i(.) = [U′−1i (.)]xm,i
xm,i,
λm,i(r) =
r∑rr=r−ro
bmi(rr, r)λm(rr),
r∑rr=r−ro
bmi(rr, r) = 1,
for all m = 1, . . . , q. Remind that xm,i(r) is the value of controllable inputs xm,i(r)
when agent i knows the true distribution charges λm(r) at time r.
Note that xm,i(r) is bounded by a lower bound xm,i and upper bound xm,i.Hence, by projection theorem {[30], Prop. 2.1.3.c}, Lemma 4.19, and (4.25), weobtain
|xm,i(r)− xm,i(r)| � |U ′−1i (λm(r))− U
′−1i (λm(r))|
� αm,i
r−1∑rr=r−ro
|πm(rr)|.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.3. Asynchronous supply coordination in a dynamic case 61
Hence,
limr→∞ |xm,i(r)− xm,i(r)| = 0, ∀m = 1, . . . , q. (4.28)
Previously, we defined the deviation in supply level estimation as Δxi(r) =
[Δx1,i(r), . . . ,Δxq,i(r)]T, where Δxm,i(r) = |xm,i(r)− xm,i(r)|. From (4.28), we
then have limr→∞ Δxi(r) = 0.
From Lemma 4.21 and (4.25), we obtain limr→∞ |lm(r) − ∂D∂λm
| = 0, for allm = 1, . . . , q.
As defined before, the error in gradient estimation is Δl(r) = [Δl1(r), . . . ,Δlq(r)]T,
where Δlm(r) = |lm(r)− ∂D∂λm
(λ(r))|. Hence, limr→∞ Δl(r) = 0.
4.3 Asynchronous supply coordination in a dynamiccase
In contrast to Section 4.2.1, here we take into account the dynamics of availablesource in the storage device zi(r) and the source hi(r) when iteratively calculatingthe optimal supply bids xm,i(r) according to (4.17). We consider these dynamicsas we assume that the current period’s decision affects the future condition in thestorage device, which is denoted by zi(r+1). We are therefore interested in settingand solving the associated dynamic optimization problem experienced by agent iand grid operator m in this section.
To do so, we first define the dynamic optimization problem faced by agent iin Subsection 4.3.1. We solve the problem using a standard Lagrangian methodcombined with a gradient projection method. Next, the dynamic optimizationproblem experienced by grid operator m is shown in Subsection 4.3.2. Underassumptions 4.3, 4.4, 4.12 and an assumption on the time at which the algorithmreaches the optimal solution, we establish the convergence of the proposed dis-tributed asynchronous supply coordination in a dynamic environment. To achievea faster convergence, we propose a suboptimal strategy in Subsection 4.3.3.
4.3.1 Dynamic asynchronous supply coordination by agent i
Note that at time r ∈ Ri = {0, . . . , rfin} agent i updates the estimates of distri-bution charges λm,i(r) for all m = 1, . . . , q based on its knowledge between timer − ro and r, given by
λm,i(r) =r∑
rr=r−ro
bm,i(rr, r) · λm(rr), (4.29)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
62 4. Asynchronous supply coordination in multiple energy grids
where∑r
rr=r−robm,i(rr, r) = 1 determines the weighting factor of distribution
charges received by agent i. Based on the estimates (4.29), agent i maximizes itsexact revenue:
maxxm,i(r)∈Xm,i,zi(r)∈Zi
rfin∑r=0
(Ui(r)−
q∑m=1
λm,i(r)xm,i(r)
), (4.30)
subject to
zi(r) = (1− δi)zi(r − 1) + ρi(hi(r − 1)−q∑
m=1
xm,i(r − 1)), (4.31)
for all r ∈ Ri with zi(r) represents the dynamics of the available source in thestorage device.
For solving the dynamic optimization problem (4.30) analytically, we can usethe standard Lagrangian method [32] or the Bellman approach [38]. Here wechoose to use the Lagrangian method, by converting the constrained maximizationproblem (4.30) to an unconstrained one with the introduction of the associated dualvariables νi. With this method, we only deal with solving the dual variables directly;we do not require the knowledge of a value function and its derivative to calculatethe optimal solution as in the Bellman approach. It is therefore computationallymore efficient to solve the dynamic optimization problem using the Lagrangianmethod than via the Bellman approach.
We first define the Lagrangian function associated with the dynamic optimiza-tion problem (4.30) as
Li(x1,i(r), . . . , xq,i(r), zi(r), νi(r))

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.3. Asynchronous supply coordination in a dynamic case 63
=
rfin∑r=0
(Ui(r)−
q∑m=1
λm,i(r)xm,i(r)
)
+
rfin∑r=1
νi(r) ((1− δ)zi(r − 1) + ρihi(r − 1))
−rfin∑r=1
νi(r)
(q∑
m=1
xm,i(r − 1))− zi(r)
)
= Ui(0)−q∑
m=1
λm,i(0)xm,i(0)
+ νi(1)
((1− δ)zi(0) + ρi(hi(0)−
q∑m=1
xm,i(0))
)
+
rfin∑r=1
(Ui(r)−
q∑m=1
λm,i(r)xm,i(r)− νi(r)zi(r)
)
+
rfin∑r=1
(νi(r + 1)
((1− δ)zi(r) + ρi(hi(r)−
q∑m=1
xm,i(r))
))
where νi(r) represents the dual variable corresponding to the r constraint
zi(r) = (1− δ)zi(r − 1) + ρi
(hi(r − 1)−
q∑m=1
xm,i(r − 1)
).
The dual variable νi(r) measures the shadow price or value of the available sourcein the storage device zi(r). The dual variable νi(r) is unique for each agent i.
The objective function of the dual problem is given by
Di(νi(r)) = maxxm,i(r)∈Xm,i,zi∈Zi
Li(x1,i(r), . . . , xq,i(r), zi(r), νi(r)). (4.32)
Hence, we obtain the dual problem defined as
Problem 4.23.
minνi
Di(νi(r)). (4.33)
Setting to zero the derivatives of the Lagrangian function
Li(x1,i(r), . . . , xq,i(r), zi(r), νi(r))
with respect to xm,i(r), zi(r), and νi(r), for all m = 1, . . . , q and r ∈ Ri, will resultin the following proposition.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
64 4. Asynchronous supply coordination in multiple energy grids
Proposition 4.24. (Optimality conditions) Let
xi(r) = [x∗1,i(r), . . . , x
∗q,i(r)]
and (x∗i (r), ν∗i (r)) is a pair of optimal solution-dual variable if and only if
∂Ui(r)
∂x∗m,i(r)
= λm,i(r) + ν∗i (r + 1)ρi (4.34)
ν∗i (r) = (1− δi)ν∗i (r + 1)
z∗i (r) = (1− δ)z∗i (r − 1) + ρi(hi(r − 1)−q∑
m=1
x∗m,i(r − 1))
x∗m,i(r) ∈ Xm,i, z∗i (r) ∈ Zi
x∗i (r) = argmaxL(xi(r), z∗i (r), ν∗i (r))
The first necessary condition (4.34) requires that the supply level in eachinternal iteration is chosen so that the marginal revenue of the additional supplylevel xm,i(r) is proportional to its marginal cost, i.e. estimated distribution chargeλm,i(r) plus future shadow price νi(r + 1).
Proof. It follows from the proof of Prop 5.1.5 in [30].
To solve the dual problem stated in Problem 4.23, we use the gradient projectionmethod, given by
ντ+1i (r) = ντi (r) +
η
[(1− δi)z
τi (r − 1) + ρi(hi(r − 1)−
q∑m=1
xτm,i(r − 1))− zτi (r)
](4.35)
where τ is the internal iteration number between r and r + 1 and η > 0 is a fixedstep size. The iterations are terminated when the successive update ντi (r) stayswithin a small bound ξ.
The proposed dynamic distributed supply coordination experienced by agent iis sketched in Algorithm 4. The algorithm is illustrated in Figure 4.1.
We are now ready to prove the convergence of ν∗i (r), which is the optimal dualvariable associated with the dynamics of the available source in the storage devicefor agent i at time r ∈ Ri.
Theorem 4.25. Given the estimates of distribution charges λm,i(r) which is based on(4.29), Algorithm 4 results in
limτ→∞ ντi (r) = ν∗i (r). (4.37)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.3. Asynchronous supply coordination in a dynamic case 65
Algorithm 4: Dynamic asynchronous supply coordination by agent i
Result: Find x∗1,i(r), . . . , x
∗q,i(r), ν
∗i (r) at each time r ∈ Ri.
Initialize ντ=0i (r) ;
Estimate λm,i(r) according to∑r
rr=r−robm,i(rr, r) · λm(rr);
while |ντi (r)− ντ−1i (r)| � ξi do
Local optimization at each agent i:
maxxm,i∈Xm,i,zi∈Zi
Uτi (r)−
q∑m=1
λm,i(r)xτm,i(r) + νi(r)
τ ((1− δi)zτi (r − 1))
+ νi(r)τ
(ρi(hi(r − 1)−
q∑m=1
xτm,i(r − 1))− zτi (r)
)(4.36)
Update the dual variable ντi (r) according to (4.35)endCalculate the optimal available source in the storage z∗i (r) and optimalestimated revenue L∗
i (r)Report x∗
m,i(r) to grid operator m.
r-1 r r+1 r-ro r+1-ro
=1
Figure 4.1: Illustration of Algorithm 1 The internal iterations between r and r + 1 arerepresented as τ .
Proof. Given the estimates of the distribution charges λm,i(r) at each time r ∈ Ri,the strong duality holds for the primal problem stated in (4.30) and its dual

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
66 4. Asynchronous supply coordination in multiple energy grids
problem, i.e.
minνi
maxxm,i∈Xm,i,zi∈Zi
Li(x1,i(r), . . . , xq,i(r), zi(r), νi(r)). (4.38)
Next, the directional derivative of the Lagrangian function
Li(x1,i(r), . . . , xq,i(r), zi(r), νi(r)) (4.39)
is given by
∂Li(xτ1,i(r), . . . , x
τq,i(r), z
τi (r), ν
τi (r))
∂ντi (r)=
(1− δi)zτi (r − 1) + ρi(hi(r − 1)−
q∑m=1
xτm,i(r − 1))− zτi (r).
It is then clear that the updates of the dual variable νi(r) in (4.35) is a gradientprojection for the dual problem (4.38). With η > 0, we obtain
limτ→∞ ντi (r) = ν∗i (r), (4.40)
as the Lagrangian dual problem is a convex problem [30].
4.3.2 Dynamic asynchronous supply coordination by grid oper-ator m
We treat a similar case as in Subsection 4.2.1, but now with dynamic agents as inSubsection 4.3.1.
Define t as a time at which the algorithm reaches the optimal solution experi-enced by agent i. We use the following assumption on the time t.
Assumption 4.26. We take the iteration time step τ sufficiently small, so that tsatisfies
r � t � r + 1− ro,
for all times r ∈ Ri.
With this assumption along with assumptions 4.3, 4.4, and 4.12, we establishthe convergence of the dynamic asynchronous supply coordination in the followingtheorem.
Theorem 4.27. Given the knowledge of the available source hi(r), the dynamics ofthe stored source zi(r), initial supply levels xm,i(0), and initial distribution charges

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.3. Asynchronous supply coordination in a dynamic case 67
λm(0) � 0, and suppose that assumptions 4.3, 4.4, 4.12, and 4.26 hold, then theerror in the distribution charge estimation Δλi(r), the deviation in the supply levelestimation Δxi(r), and the error in the gradient estimation Δl(r) all converge to zeroas r → ∞, for all i ∈ I and m ∈ M .
Proof. As the convergence of the new dual variable νi(r) associated with dynamicsof the stored source zi(r) is proved in Theorem 4.25, the proof here follows thesame reasoning as Theorem 4.15.
4.3.3 Suboptimal strategy
As defined in (4.29), agent i updates its knowledge of any published distributioncharge λm(rr) at times r − ro � rr � r to obtain new estimates of the distributioncharge λm,i(r). However, the convergence of Algorithm 4 may be slow, resulting int � r − ro thus conflicting with assumption 4.26. An intuitive way to tackle thisissue is by terminating the iterations in (4.35) when τ reaches a certain numberN . Nevertheless, the optimal solution using this termination criterion may notconverge to the precise primal optimal solution, but only to an approximatedsolution, as is standard for gradient iteration methods. In other words, we onlyobtain the approximated optimal solutions xN
m,i(r) for all m = 1, . . . , q with theapproximated revenue value
Li(xN1,i(r), . . . , x
Nq,i(r), z
Ni (r), νNi (r)) � Li(x
∗1,i(r), . . . , x
∗q,i(r), z
∗i (r), ν
∗i (r)),(4.41)
where Li(x∗1,i(r), . . . , x
∗q,i(r), z
∗i (r), ν
∗i (r)) is the optimal exact revenue obtained by
Algorithm 4.The sub-optimality can be improved by using the accelerated gradient method
[90]. In principle, this method takes into account the history of the optimizationprocess done in the preceding iterations when computing the next iterations. Tomodel the accelerated gradient iteration for the dual variable βτ
i (r), we use thetwo-step update of the form
ντ+1i (r) = ντi (r) +
γ
[(1− δi)z
τi (r − 1) + ρi(hi(r − 1)−
q∑m=1
xτm,i(r − 1))− zτi (r)
]+
τ − 1
τ + 2(ντi (r)− ντ−1
i (r)). (4.42)
The convergence rate properties for the dual function value using this acceleratedgradient method is given in [50]. See, e.g. [53] and [48], for recent applications ofthe accelerated gradient methods to solve a large number of optimization problems.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
68 4. Asynchronous supply coordination in multiple energy grids
4.4 Power-to-Gas case study
In this section, an application of the distributed asynchronous supply coordinationproposed in Section 4.3 is presented. The example is taken from a setup consistingof Power-to-Gas (PtG) facilities embedded in the same electricity grid, the same lowpressure gas grid, and the same mobility industrial grid which has been describedin Section 3.2. The schematic illustration of the considered setup is shown in Figure3.1.
The rest of this section is organized as follows. In Subsection 4.4.1, we providethe simulation setup of PtG facilities equipped with energy converters and storagedevices and embedded in the electricity grid, gas grid, and mobility industrialgrid. The aim of the PtG facility case study is to show the behavior of the distri-bution charges in both synchronous and asynchronous settings with diverse initialdistribution charges and to indicate the role of distribution charges in avoidingthe overloading of the grids. The associated simulation results are presented inSubsection 4.4.2, whereas the performance evaluations of the standard update rule(4.35) and the accelerated update rule (4.42) are shown in Subsection 4.4.3.
4.4.1 Simulation setup
For notational convenience, we rename some of the variables involved in Chapter3. The hydrogen production level is denoted by hi(k) ∈ R+, at each time k ∈{1, . . . ,K}. The PtG facility aims at creating revenue from the produced hydrogenby injecting it into the gas grid and mobility industrial grid at a level of xg,i(k) ∈R+ and xy,i(k) ∈ R+, respectively. Additionally, the produced hydrogen can bereconverted into electrical energy using a PEM fuel cell before selling it to a powergrid. The corresponding amount of hydrogen is denoted by xe,i(k) ∈ R+. Clearly,xe,i(k) = 0 if hi(k) > 0.
As briefly stated before, the objective of the community consisting of n PtGfacilities embedded in the same gas grid, mobility industrial grid, and power gridis to decide the supply levels xg,i(k), xy,i(k), xe,i(k) for all i = 1, . . . , n so as to:maxxm,i,xy,i,xe,i
∑ni=1 Um,i(k) subject to (4.1)-(4.4).
In the simulation, we consider 5 PtG facilities equipped with 10e+6 Nm3
pressured tanks. We implement algorithms for both distributed synchronous andasynchronous supply coordination for each PtG facility i and grid operator m in thedynamic case. In the distributed synchronous supply coordination, all PtG facilitiesand grid operators calculate their solution at the same iteration r. In the distributedasynchronous supply coordination, we have two groups, namely a group of PtGfacilities and a group of grid operators. The PtG facilities and the grid operatorsperform their optimization when the iteration numbers r are uneven and even,respectively.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.4. Power-to-Gas case study 69
The parameter values involved in objective function Ui and the grid capacitiesare given in Table 4.1. With the uniform values for the associated selling prices andcosts in the low pressure gas grid and in the mobility industrial grid, i.e. pm, cm, cqmfor m = g, y, the proposed algorithm calculates the optimal values of xg,i and xy,i
at the same time. As hi > 0, it implies no chance for the PtG facilities to injecttheir energy to the power grid. We initially set the available hydrogen stored in thestorage device at zero level.
Table 4.1: The parameter values involved in the objective functions [66]
Var Value Unit Var Value Unit
pg = py 0.2 e/Nm3 Si 10e+6 Nm3
cg,i = cy,i 0.019 e/Nm3 xg,i = xy,i 0 Nm3
cqg,i = cqy,i 0.001 e/Nm3 xg,i = xy,i 100 Nm3
hi 5e+4 Nm3 cg = cy 43 Nm3
We specify the constant step sizes γ in (4.15) and η in (4.35) at 5e-4. Thestopping criterion ξ and ξm are set at 0.01 for all grid operator m = g, y, e. Theoptimal solutions are calculated using the QP-solver from Gurobi 5.6.3 embeddedin MATLAB 2014a.
4.4.2 Distribution charge behavior
0 10 20 30 40
0.00
0.05
0.10
0.15
Asynchronous updates
Synchronous updates
Evolu
tion o
f dis
trib
ution c
harg
e
(Euro
/Nm
3)
Iterations (r)
0 10 20 30 40
0
250
500
750
1000
Synchronous updates
Asynchronous updates
Tota
l supply
(N
m3)
Iterations (r)
Figure 4.2: The evolution of distribution charges and aggregated supply bids in the gas gridand mobility industrial grid when the distribution charges are initially set at zero.
Figure 4.2 and Figure 4.3 show the evolution of the optimal aggregated supplylevel of 5 PtG facilities and the optimal distribution charges of the gas grid andmobility industrial grid when the distribution charges are initially set at zero andone, respectively. They are identical due to the settings pg = py, cg,i = cy,i, and

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
70 4. Asynchronous supply coordination in multiple energy grids
0 1000 2000 3000 40000.0
0.3
0.6
0.9
Asynchronous updates
Synchronous updates
Evolu
tion o
f dis
trib
ution c
harg
e
(Euro
/Nm
3)
Iterations (r)
0 1000 2000 3000 4000
0
20
40
60
Asynchronous updates
Synchronous updates
Tota
l supply
(Nm
3)
Iterations (r)
Figure 4.3: The evolution of distribution charges and aggregated supply bids in the gas gridand mobility industrial grid when the distribution charges are initially set at one.
cqg,i = cqy,i, for all i = 1, . . . , 5. As shown in the figures, the optimal solutionsx∗g,i, x
∗y,i, λ
∗g, λ
∗y from both algorithms of synchronous and asynchronous distributed
supply coordination are equal. As expected, the convergence is much faster whenthe updates are done synchronously. By reviewing Figure 4.2 next to Figure 4.3,two different initial distribution charges result in a different number of iterationsneeded for the solutions to converge. From the figures we see that when the energygrid operators detect the overloading grids, i.e.
∑5i=1 xg,i > 43Nm3, they increase
their distribution charges from the initial values. Otherwise, they decrease thedistribution charges, with zero as a lower bound.
Figure 4.4: Convergence of the supply bids with diverse selling prices of the energy grids.The energy grid which has the most appealing selling price requires more iterations for thesolutions to converge.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
4.5. Concluding remarks 71
Now we elaborate more on Remark 4.14. In particular, we aim at providingsome insight of the proposed algorithms when an energy grid offers more appealingselling prices to PtG facilities than other energy grids. In the simulation, the gasgrid is set to have the highest selling price, followed by the mobility industrial gridand power grid. As seen in Figure 4.4, calculation on finding the optimal supplylevels in the gas grid requires larger numbers of iterations than others. It is dueto the fact that the energy grid which has the highest selling price pm will be thefirst concern of all PtG facilities, making the corresponding grid operator m moredifficult to reach the equilibrium of its optimal distribution charge.
4.4.3 Performance evaluation
Here we evaluate the performance of the standard update rule (4.35) and theaccelerated update rule (4.42). Specifically, we compare the number of iterationsneeded when using the standard update rule (4.35) without and with a maximumiteration N=2210 and when using the accelerated update rule (4.42).
The simulation results are shown in Figure 4.5. It shows that the acceleratedupdate rule (4.42) provides the least number of iterations (N=2210) needed forthe solutions to converge, whereas the standard update rule (4.35) requires 4470iterations. Practically, it is difficult to estimate a sufficiently good value of N . Itfollows from the simulation results shown in Figure 4.5, that the optimal supplylevel is zero when using the standard update rule (4.35) with a maximum iterationN=2210, whereas the real optimal supply level using the standard update rule(4.35) is 42.66 Nm3. In other words, the standard update rule (4.35) with amaximum iteration N=2210 fails to reach the real optimal value.
4.5 Concluding remarks
We have presented the distributed asynchronous supply coordination of agentswhich are equipped with storage devices and embedded in multiple grids. Wehave shown that the distribution charges help the grid operators to optimallydecide about the supply levels for diverse agents, thus avoiding overloading grids.The associated algorithms for both static and dynamic environments have beenproposed in Sections 4.2 and 4.3, respectively. Under assumptions on the revenuefunctions, on the time between the successive updates, and on the time at whichthe algorithm reaches the optimal solutions, we have proved the convergence of theour proposed algorithms. By simulations, we have demonstrated the convergencein both synchronous and asynchronous cases, have provided some insights on thebehaviors of distribution charges, and have evaluated the performance of variedupdating rules.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
72 4. Asynchronous supply coordination in multiple energy grids
0 800 1600 2400 3200 4000
0
15
30
45
60
Accelerated gradient (31)
Standard gradient (25)
Standard gradient (25), with N=2210
The s
upply
bid
s for
the g
as g
rid
(Nm
3)
Internal iteration (τ)
Figure 4.5: The convergence of the supply bids The dual variable is initially set at one.The accelerated update rule (4.42) provides the least number of iterations (N=2210) neededfor solutions to converge, whereas the standard update rule (4.35) requires 4470 iterations.The optimal supply bids using the standard update rule (4.35) with and without maximumnumber iteration N = 2210 and using the accelerated update rule (4.42) are 0, 42.66, and42.59 Nm3, respectively.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 5Asynchronous supply and consumption coordination of
biogas prosumers

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 5
Asynchronous supply and consumptioncoordination of biogas prosumers
This chapter is based on our work presented in [13]. We utilize the method andalgorithms proposed in Chapter 4 for the congestion control and flow control ofa community consisting of biogas prosumers embedded in the low-pressure gasgrid and in the low-voltage power grid. The prosumers are equipped with devicesrunning on biogas which is generated by a central anaerobic digester. Here wepropose bidirectional communication between the prosumers and the energy gridoperators and between the prosumers and the digester operator in order to obeythe grid capacity constraints. We formulate the associated optimization problemsin the MPC framework reviewed in Section 2.2.
The rest of the chapter is organized as follows. We introduce the problemsetting of the considered community in Section 5.1. A modeling for prosumerswith biogas μ-CHPs and energy storage devices are provided in Section 5.2. Thedistributed supply and consumption coordination between the prosumers and theenergy operators and between the prosumers and the digester operator is presentedin Section 5.3. The asynchronous implementation on the distributed coordinationis given in Section 5.4. Our proof-of-concept demonstrations and some concludingremarks of the chapter are presented in Sections 5.5 and 5.6, respectively.
5.1 Problem setting
The drive towards a low-carbon economy coupled with decreasing productionof conventional energy has motivated countries to subsidize the production andinjection of renewable gas, i.e. biogas, into an existing low-pressure gas grid [58].Biogas results from the anaerobic digestion of organic waste. It therefore dependson the weather conditions and agricultural seasons. Due to high investment costand minimum volume of waste needed to operate, actors in various agriculturalsectors may build a central anaerobic digester to produce biogas from the collectedorganic waste [56]. They may not only produce biogas, but also use specialhouseholds that reliably and safely consume biogas. We thus call them prosumer.Assuming that biogas is predominantly used for space heating, the consumptionlevel fluctuates over the year. This results in a mismatch between biogas supply

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
74 5. Asynchronous supply and consumption coordination of biogas prosumers
and demand.
There exists a large literature on mitigating the imbalance, see, e.g., [79], [28],[19], and [84]. In [79], local gas storage devices allow prosumers to make benefitof fluctuating gas price. The prosumers can store the excess biogas if selling it tothe low-pressure gas grid is not beneficial. When the price is high, the prosumerscan sell the stored gas hence creating some revenue [28]. However, it needs to beupgraded first to green gas in order to meet the gas quality requirement on thegrid. Biogas can also be used to turn on some energy converter, i.e. Combined Heatand Power (CHP), to generate heat and power to fulfill the local energy demands[19]. When they are embedded in a low-voltage power grid, the produced powercan be sold to the grid hence creating revenue as well [84].
While most recent studies only investigated one or two of these scenarios, e.g.,[79]-[84], we address the imbalance problem by taking all aforementioned sce-narios into account in this work. Specifically, we consider a community consistingof the prosumers. The community builds a central anaerobic digester to generatebiogas from collected organic waste provided by the prosumers. They are equippedwith local gas storage devices, heat buffers, and biogas CHPs with a power outputcapacity less than 15 kW hence named as micro-CHPs or μ-CHPs. The community isembedded in a low-pressure gas grid and low-voltage power grid thus allowing theprosumers to create revenue from their excess energy. The schematic illustrationis shown in Figure 5.1. It is therefore necessary to take into account all possiblecurrent and predicted limitations in the energy grids and the digester. With this set-ting, it is natural to formulate the corresponding optimization problem in the MPCframework reviewed in Section 2.2. In this way, each prosumer in the communityhas capability to anticipate the unexpected future events.
As energy will flow in two directions, come from multiple sources at multiplelocations, and may have varying qualities, the grid operators need to transformfrom passive to active grid management in order to maintain the grid stability[97]. Similarly, it is desirable that the operator of the central anaerobic digesterbidirectionally communicates with the prosumers in the community to ensure thatthe aggregated biogas consumption level asked by the prosumers is not exceed-ing the associated capacity constraint. In this paper, we propose a way to usetime-varying prices, named as distribution charges, associated with the capacityconstraints to coordinate the prosumers’ supply and consumption levels. Basedon Section 4.3, we here provide distributed algorithms allowing the prosumersto locally and asynchronously calculate their optimal energy supply and biogasconsumption levels.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.2. Prosumers with biogas μ-CHPs and energy storage devices 75
Aux. burner
Heat demand
Power demand
Heat tank
Gas storage
Upgrade
Power grid
Low pressure
gas grid
Biogas flow
Power flow
Heat flow
Central anaerobic digester
Green gas flow
Prime mover
��CHP Prosumer 1
Heat demand
Gas storage
Prime mover
Aux. burner
��CHP
Prosumer n
Heat tank
Power demand
Figure 5.1: Schematic illustration of a community consisting of prosumers which areequipped with biogas μ-CHPs, heat buffers, and local gas storage devices. The communityowns a central anaerobic digester and a central biogas upgrader. The community is embeddedin a low-pressure gas grid and in a low-voltage power grid.
5.2 Prosumers with biogas μ-CHPs and energy stor-age devices
Consider a set N of prosumers building a community. Due to high investmentcost and minimum volume of waste needed to operate, the community owns acentral anaerobic digester to generate biogas from their collected organic waste[19]. Define wi(k) as the waste from prosumer i ∈ N converted to biogas bi(k)
at time k with an efficiency ηw ∈ (0, 1]. Hence, bi(k) = ηw · wi(k). As the centralanaerobic digester has a limited production capacity B(k), the aggregated biogasproduced from the digester is limited by∑
i∈N
bi(k) � B(k). (5.1)
Here we assume that the produced biogas bi(k) can be utilized by prosumer i
without any associated cost.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
76 5. Asynchronous supply and consumption coordination of biogas prosumers
Equipped with μ-CHPs and local energy storage devices and embedded inthe low-pressure gas grid and in the low-voltage power grid, some amount ofbiogas bi(k) can be used to: 1) run the μ-CHP to satisfy the local power demandpd,i(k) ∈ R+ and the local heat demand hd,i(k) ∈ R+, 2) fill the local gas storagedevice hence allowing prosumer i to use the stored biogas at a later moment, 3)create revenue by selling the upgraded biogas to the low-pressure gas grid. SeeFigure 1 for the schematic illustration.
We describe the technical details and constraints of the μ-CHP in Subsection5.2.1, the operational constraints of the heat buffer in Subsection 5.2.2, the dynam-ics of the gas storage device in Subsection 5.2.3, and the role of the low-pressuregas grid and the low-voltage power grid in Subsection 5.2.4.
5.2.1 μ-CHP
As stated earlier, biogas can be utilized to generate power and heat simultaneouslyusing CHP. See, e.g. [19], for the detailed description of a CHP system running onbiogas. For residential buildings, CHP can be a controllable domestic generatorwith the capacity less than 15 kW [87]. We call it as micro-CHP or μ-CHP as thecapacity of CHP commonly varies between 50 kW-40 MW. It mainly consists of aprime mover and an auxiliary burner. Typically, a fuel cell prime mover is chosenas it has the highest electric efficiency among other prime mover technologies andprovides low emissions [1].
Combined with oxygen, biogas can be used to run the fuel cell prime moverof μ-CHP to produce electricity, with heat as a byproduct [19]. Suppose thatthe prime mover produces power output at a level of ppm,i(k) ∈ R+ with anefficiency ηp,i ∈ (0, 1] and heat output at a level of hpm,i(k) ∈ R+ with an efficiencyηh,i ∈ (0, 1] at time k. Because of the coupling outputs produced from the primemover of μ-CHP, we have
hpm,i(k) =ηh,iηp,i
ppm,i(k). (5.2)
Due to the couplings, there are two possible control strategies to run the primemover of μ-CHP: the prime mover can be controlled either based on local heatdemand or power demand. When the prime mover is controlled based on local heatdemand, the power output from the prime mover fluctuates accordingly. Otherwise,the heat output fluctuates accordingly.
Due to the production capacity of the prime mover of the μ-CHP, the energyoutput should satisfy its lower and upper output limits given by
pminpm,i(k) � ppm,i(k) � pmax
pm,i(k), (5.3)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.2. Prosumers with biogas μ-CHPs and energy storage devices 77
where pmin(max)pm,i (k) ∈ R+are the lower (upper) power output limits, respectively.
As mentioned earlier, the μ-CHP does not only consist of the prime mover, butalso consists of an auxiliary burner. The auxiliary burner of μ-CHP only producesheat output at a rate haux,i(k) ∈ R+, modulating between a certain minimumcapacity hmin
aux,i(k) ∈ R+ and maximum capacity hmaxaux,i(k) ∈ R+, i.e.
hminaux,i(k) � haux,i(k) � hmax
aux,i(k). (5.4)
Prosumers may turn on the auxiliary burner in the case of high heat demand. Inthis way, undesired power output from the prime mover is avoidable.
5.2.2 Heat buffer
To mitigate the fluctuating heat output from the prime mover of the μ-CHP dueto the power-led control, prosumers can utilize a local heat storage device. A hotwater tank can be a realistic heat buffer for residential buildings. Assume that thereare no thermal losses in the conversion and storage system. Then by referring to[57], the dynamics of the available heat in the heat storage device, zh,i(k) ∈ R+, isgiven by
zh,i(k + 1) = zh,i(k) + hpm,i(k) + haux,i(k)− hd,i(k). (5.5)
The device is also useful to cover high heat demand against the uncertain biogasproduction. The available heat in the heat buffer thus needs to stay in the followingrange:
zminh,i � zh,i(k) � zmax
h,i , (5.6)
where zmin(max)h,i = micpΔT
min(max)i with mi is the mass of water, cp is heat
constant, and ΔTmin(max)i is the difference between the appropriate temperature
and the minimum (maximum) temperature of the water. The maximum value zmaxh,i
commonly corresponds to a maximum capacity of the heat storage device.
5.2.3 Gas storage device
One way to mitigate the imbalance between varying biogas production and fluctuat-ing biogas consumption level at each time k is to utilize a local gas storage. Defineui(k) ∈ R+ and ui(k) ∈ R− as some amount of biogas stored and taken from thegas storage device, respectively. We model the dynamics of biogas available in thedecentralized gas storage device, zg,i(k) ∈ R+, as
zg,i(k + 1) = zg,i(k) + ui(k). (5.7)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
78 5. Asynchronous supply and consumption coordination of biogas prosumers
The dynamics (5.7) is under an assumption that there is no leakage of the storedbiogas over time. Given a maximum capacity of the biogas storage device Sg,i ∈ R+,the available biogas in the gas storage device is thus limited by
0 � zg,i(k) � Sg,i. (5.8)
In order to: 1) generate power output from the prime mover at a level ofppm,i(k), 2) produce heat from the auxiliary burner at a level of haux,i(k), and/or3) create revenue by selling biogas to the gas grid at a level of gi(k) ∈ R+, prosumeri can take some amount of biogas from the gas storage device at rate ui(k) ∈ R−and/or ask some amount of biogas from the biogas anaerobic digester at a levelof bi(k) ∈ R+. With the aforementioned setting, we have the following equalityconstraint:
bi(k) =1
ηp,ippm,i(k) +
1
ηh,ihaux,i(k) + ui(k) + gi(k). (5.9)
It is important to note that in an effort to meet the gas quality requirements forgrid injection, the biogas being sold to the low-pressure gas grid at a level of gi(k)needs to be upgraded to green gas. Some upgrading technology options can befound in [89]. As the associated investment is currently high, the prosumers maychoose to have a central gas upgrader to generate green gas from the producedbiogas. Indeed, the biogas upgrader has a limited capacity V ∈ R+, thereby
∑i∈N
gi(k) � V. (5.10)
5.2.4 Capacities on the energy grids
The biogas needs to be upgraded to green gas with an efficiency ηg ∈ (0, 1] beforeinjecting it to the low-pressure gas grid. Due to capacity of the gas grid which isdenoted by G(k) ∈ R+, the aggregated green gas supplied by prosumers is upperbounded by
ηg∑i∈N
gi(k) � G(k). (5.11)
Remark 5.1. The prosumers aim at creating as much revenue as possible by injectingthe produced green gas to the low-pressure gas grid. A sufficiently large capacityof the central biogas upgrader is therefore chosen. The bottleneck for injecting theproduced green gas is then the constraint (5.11), not the constraint (5.10).
When the selling price of the power grid is appealing, the prosumers may

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.3. Distributed supply and consumption coordination 79
produce more power output from the prime mover of μ-CHPs than their localpower demand. In this way, the prosumers can create some revenue by selling theexcess power output to the power grid. Nevertheless, the power grid has a limitedcapacity which is denoted by Pcap(k) ∈ R+ thereby restricting the aggregatedpower supply level from the prosumers, i.e.∑
i∈N
ppm,i(k)− pd,i(k) � Pcap(k). (5.12)
In the case that pd,i(k) > ppm,i(k), Pcap(k) denotes the maximum power that canbe imported from the power grid to the network of prosumers.
5.3 Distributed supply and consumption coordina-tion
Each prosumer may have different choices on how to utilize the produced biogasand on how to cover its local power and heat demands. In particular, the prosumerscan use the produced biogas to turn μ-CHP on, to create revenue by upgrading andselling it to the low-pressure gas grid, and/or to fill its decentralized gas storagedevice. They can cover locally power demand from the prime mover of their μ-CHPsand/or from the external power grid. They can satisfy their local heat demand fromthe prime mover and/or the auxiliary burner of their μ-CHPs. See again Figure 5.1.
With those choices, the prosumers have a multi-objective optimization problem.As modeled in [15]-[70], there are at least three objective functions for eachprosumer i. Firstly, the prosumers aim at maximizing their revenue from theirproduced renewable energy. Secondly, they aim at minimizing the cost of effortrelated to charging and discharging routines of their gas storage device. Thirdly,they aim at ensuring that the auxiliary burner is only on when it is needed to meetthe heat storage constraints. With a given time horizon K, the multi-objectiveoptimization problem is subject to all constraints (5.1)-(5.9) and (5.11)-(5.12), i.e.
maxui,gi,ppm,i,haux,i
K∑k=1
∑i∈N
(rp(k)− cp,i(k))pi(k)− ctp,i(k)pi(k)2
+ (rg(k)− cg(k))ηggi(k)− ctg(k)ηggi(k)2 − yiui(k)
2 − jihaux,i(k)2 (5.13)
subject to the constraints (5.1)-(5.9) and (5.11)-(5.12), where pi(k) = ppm,i(k)−pd,i(k), rp(k) is the selling price on the power grid, cp,i(k) is the cost producingpower output at a level of ppm,i(k), ctp,i(k) is the cost associated with transmissionlosses of pi(k), rg(k) is the selling price on the low pressure gas grid, cg,i(k) is

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
80 5. Asynchronous supply and consumption coordination of biogas prosumers
the cost producing and selling green gas at a level of gi(k), ctg,i(k) is the costassociated with transmission losses of gi(k), yi represents the cost of effort instoring/taking biogas from the decentralized gas storage device, whereas ji de-notes the cost of effort in producing heat from the auxiliary burner. Inspiredby [71], we formulate the cost of transmission losses in a quadratic form. Weset ji at a sufficiently high value ensuring that the auxiliary burner will only beturned on when it is needed to meet the heat storage constraints (5.6). Note thatrp(k), cp,i(k), ctp,i(k), rg(k), cg(k), ctg(k), yi, ji ∈ R+.
Define
zi(k) = [zh,i(k), zg,i(k)]T ,
Zi = {zi(k)|[zminh,i (k), 0]T � zi(k) � [zmax
h,i (k), Sg,i]T },
and Ui(k) for the objective function in (5.13). For notational convenience, thecontrol objective is to decide the supply and consumption levels
xi(k) = [ppm,i(k), haux,i(k), ui(k), gi(k)]T
for all prosumers i = 1, . . . , n so as to:
Problem 5.2.
maxxi(k)∈Xi
K∑k=1
∑i∈N
Ui(xi(k))
subject to ∑i∈N
Hxi(k) � C(k), (5.14)
zi(k + 1) = zi(k) +Aixi(k) + Fifi(k),

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.3. Distributed supply and consumption coordination 81
and boundary conditions on zi(k) ∈ Zi and xi(k) ∈ Xi, where
Xi = {xi(k)|xi(k) � xi(k) � xi(k)} ,
Hi =
⎡⎢⎢⎢⎣
1 0 0 0
0 0 0 01
ηp,i
1ηh,i
1 1
0 0 0 ηg
⎤⎥⎥⎥⎦ , Fi =
[0 −1
0 0
]
C(k) =
⎡⎢⎢⎣
Pcap(k)−∑
i∈N Pd, i(k)
0
B(k)
G(k)
⎤⎥⎥⎦ ,
fi(k) =
[0
hd,i(k)
], and Ai =
[ηh,i
ηp,i1 0 0
0 0 1 0
],
with
xi(k) =[pminpm,i(k), h
minaux,i(k), u
mini (k), gmin
i (k)]T
and
xi(k) =[pmaxpm,i(k), h
maxaux,i(k), u
maxi (k), gmax
i (k)]T
.
We consider the same assumptions as stated in assumptions 4.3 and 4.4 on theprofit function Ui(xi(k)).
5.3.1 Model predictive control problem
To handle all technical constraints and to anticipate the future situation of theenergy grids and the local energy demand patterns, Problem 5.2 is solved usinga model predictive control (MPC) approach reviewed in Section 2.2. With thisapproach, the profit is maximized over a prediction horizon T given the estimatesof future conditions in the low-voltage power grid, the low-pressure gas grid, thebiogas production level, and the local heat and power demands. From the sequenceof optimal solutions that covers the time horizon T , only the optimal solution ofthe first step is applied. At the next time step the optimization problem is re-solvedand, again, only the solution of first step is implemented.
Let Ui(xi(k)) be the total estimated profit of prosumer i over a given timehorizon T . Then we formulate Problem 5.2 in an MPC setting as
Problem 5.3.
maxxi(k)∈Xi
k+T∑τ=k
∑i∈N
Ui(xi(τ)) (5.15)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
82 5. Asynchronous supply and consumption coordination of biogas prosumers
subject to the prediction model of the constraints (5.1)-(5.9) and (5.11)-(5.12),boundary conditions zi(k) ∈ Zi, and given initial conditions zi(τ = 0) = zi(k).The hat notations are defined to distinguish the prediction parameters from thesystem model parameters and τ = k, . . . , k + T is a new time variable introducedto distinguish between the system time k and the prediction time τ .
Solving Problem 5.3 requires a centralized agent that has knowledge of all states,local measurements, and objective function of all prosumers. Additionally, large-scale prosumers embedded in the gas grid and in the power grid may be the casefor the future gas value chain. The nature of the problem thus requires a distributedcontroller, that each prosumer i locally decides its supply and consumption levelsbased on its own local information. Yet, some coordination with the energy gridoperators and with the digester operator is still necessary to avoid congested gridsand biogas shortage. In what follows, we solve Problem 5.3 in a distributed fashionthereby allowing the prosumers to control their supply and consumption levelslocally.
5.3.2 Distributed MPC problem
To do it, we combine a dual decomposition approach with the gradient projectionmethod to decouple Problem 5.3. Note that the constraints
∑i∈N Hixi(k) �
C(k) make the prosumers coupled with each other. We then define a Lagrangianfunction associated with these coupling constraints with dual variables λ(τ) =
[λp(τ), λb(τ), λg(τ)] as
L(x, λ) =k+T∑τ=k
∑i∈N
Ui(xi(τ))− λ(τ)
(∑i∈N
Hixi(k)− C(k)
). (5.16)
The objective function of the dual problem is given by D(λ) = maxL(x, λ). Wetherefore obtain the dual problem defined by
Problem 5.4.
minλ
D(λ), (5.17)
subject to λ � 0, the prediction model of the constraints zi(k + 1) = zi(k) +
Aixi(k) + Fifi(k) and boundary conditions xi(k) ∈ Xi and zi(k) ∈ Zi.
Remark 5.5. The Lagrangian function (5.16) is separable for each prosumer i, eachenergy grid operator, and the digester operator. As a consequence, we obtain atwo-layer optimization problem. At the lower level, we have the sub-problemsfaced by prosumer i given by

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.3. Distributed supply and consumption coordination 83
Problem 5.6.
max
k+T∑τ=k
Ui(xi(τ))− λ(τ)∑i∈N
Hixi(k), (5.18)
subject to the prediction model of the constraints zi(k + 1) = zi(k) +Aixi(k) +
Fifi(k) and the boundary conditions xi(k) ∈ Xi and zi(k) ∈ Zi. At the higher level,we have the master problem to take care of updating the dual variables λ(k) bysolving
Problem 5.7.
minλ(τ)
d(λ(τ)) =∑i∈N
di(λ(τ)) + λ(τ)C(τ), (5.19)
subject to λ(τ) � 0, where di(λ(τ)) is the dual function obtained as the maxi-mum value of Problem 5.6 solved by prosumers for a given λ.
Under assumption 4.3, Problem 5.4 can be solved with the following gradientiteration [85]:
λr+1(τ) = max
(0, λr(τ) + βr
(n∑
i=1
Hixri (τ)− C(τ)
)), (5.20)
where βr > 0 is the step size and r is internal iteration within time τ .
As stated before, we have the dual variables λ(τ) = [λp(τ), λb(τ), λg(τ)]. From(5.20), the updates
λr+1p (τ) = max
(0, λr
p(τ) + βr
(∑i∈N
pri (τ)− ˆPcap(τ)
)),
λr+1g (τ) = max
(0, λr
g(τ) + βr
(ηg
∑i∈N
gri (τ)− G(τ)
)),
λr+1b (τ) = max
(0, λr
b(τ) + βr
(∑i∈N
bri (τ)− B(τ)
)),
are experienced by the power grid operator, the gas grid operator, and the digesteroperator, respectively. The grid operators and the digester operator terminate theupdates when the successive of their dual variables are within a small bound ξ andwhen their grid capacity constraints are obeyed. In what follows, we call the dualvariables as distribution charges.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
84 5. Asynchronous supply and consumption coordination of biogas prosumers
5.4 Asynchronous supply and consumption coordi-nation
We here assume that the prosumers, the grid operators, and the digester operatormay not update their systems synchronously due to essential time delay, or simplybecause they do not have access to a common clock. Hence, we now implementthe asynchronous scheme to solve Problem 5.4. We require that:
1. the power grid operator has estimates of the aggregated power supply bids,denoted by
∑ni=1 pi(r),
2. the gas grid operator has estimates of the aggregated gas supply bids, givenby
∑ni=1 gi(r),
3. the central anaerobic digester has estimates of the aggregated biogas con-sumption bids, defined by
∑ni=1 bi(r), and
4. the prosumers have estimates of the distribution charges, denoted by λi(r)
based on their current knowledge.
5.4.1 The implementation in a dynamic case
Now we take into account the dynamics of the available energy in the storagedevices zi(r) when iteratively calculating the optimal supply and consumptionbids xi(r). The algorithms with asynchronous iterative search embedded for eachprosumer, each energy grid operator, and the digester operator are provided inthe following three subsections. For simplicity, we provide the algorithm for aprediction time τ = k.
A. Distributed asynchronous coordination done by prosumer i
Recall that xi(r) = [ppm,i(r), haux,i(r), ui(r), gi(r)]T . Within τ , let Ri ∈ {1, 2, . . .}
be the time at which prosumer i updates its supply levels xi(r) by locally solving itsproblem 5.6.
1. At times r ∈ Ri, prosumer i estimates the distribution charge λi(r) by λi(r) =∑rr′=r−ro
bi(r′, r) · λ(r′) with λi(r
′) is the distribution charge received byprosumer i from the energy grid operators and the central anaerobic digesterat time r′ and
∑rr′=r−ro
bi(r′, r) = 1∀r ∈ Ri weights the distribution charges
obtained by prosumer i.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.4. Asynchronous supply and consumption coordination 85
2. Based on the estimated distribution charge λi(r) and its local information,prosumer i locally solves Problem 5.6 subject to boundary conditions xi(r) ∈X . By also considering the dynamic constraints zi(r + 1) = zi(r) +Aixi(r) +
Fifi(r) and boundary conditions xi(r) ∈ X and zi(r) ∈ Z, prosumer i getsxi(r) = xi(λi(r)). To solve the corresponding dynamic optimization problem,we follow the same method proposed in Subsection 4.3.1.
3. Calculate the biogas consumption bid bi(r) by
bi(r) =1
ηp,ippm,i(r) +
1
ηaux,ihaux,i(r) + ui(r) + gi(r).
4. Prosumer i publishes the power supply bid ppm,i(r) to the power grid operator,the gas supply bids gi(r) to the gas grid operator, and the biogas consumptionbid bi(r) to the digester operator.
5. At times r /∈ Ri, xi(r + 1) = xi(r).
This algorithm repeats up till the successive updates xi(r) are within a small boundξ, i.e. |xi(r)− xi(r − 1)| � ξ.
B. Dynamic distributed asynchronous supply coordination by the digester op-erator b
Let Rb ∈ {1, 2, . . .} be the time at which the digester operator b updates its distribu-tion charge λb.
1. At times r ∈ Rb, the digester operator b estimates the aggregated biogas con-sumption bids from all prosumers by
∑ni=1 bi(r) =
∑ni=1
∑rr′=r−ro
ab(r′, r) ·
bi(r′) with
∑rr′=r−ro
ab(r′, r) = 1 denotes the weighting factor of the aggre-
gated biogas consumption bids and bi(r′) is the aggregated biogas consump-
tion bids received by the digester operator b at time r′.
2. Based on the estimated aggregated biogas consumption bids∑n
i=1 bi(r), thedigester operator b modifies its distribution charge
λb(r + 1) = max(0, λb(r) + β(
n∑i=1
bi(r)−B)).
3. The digester operator b publishes λb(r) to all prosumers connected.
4. At times r /∈ Rb, λb(r + 1) = λb(r).

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
86 5. Asynchronous supply and consumption coordination of biogas prosumers
r r+1 r+1-ro
Anaerobic digester y
Prosumer i
r r-ro r+1 r+1-ro
r-ro
Figure 5.2: Interaction between prosumer i and the digester operator b with asynchronousimplementation.
The iterations are terminated when the successive updates λb(r) are within a smallbound ξ, i.e. |λb(r)− λb(r − 1)| � ξ.
The algorithms proposed in Subsections 5.4.1.A and 5.4.1.B are illustrated inFigure 5.2.
C. Distributed asynchronous coordination done by the gas and power gridoperators p and g
We use similar steps as in Subsection 4.3.2 to provide the algorithms for distributedasynchronous coordination which is done by the gas grid operator g and the powergrid operator p.
The time between the successive updates are assumed to obey the assumption4.12. We also use the same assumption as stated in the assumption 4.26 on a timeh at which the algorithm for solving Problem 5.4 reaches the optimal solution.
Define the error in the distribution charge estimation as
Δλ(r) = [Δλp(r),Δλb(r),Δλg(r)]T
with Δλm(r) = |λim(r)− λi
m(r)| for all m = p, b, g, the deviation in the supply andconsumption bid estimation as
Δxi(r) = [Δppm,i(r),Δhaux,i(r),Δui(r),Δgi(r)]T
with Δppm,i(r) = |ppm,i(r)− ppm,i(r)|, and the error in the gradient estimation as
Δl(r) = [Δlp(r),Δlb(r),Δlg(r)]T

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.5. Simulation results 87
with Δlm(r) = |lm(r)− ∂D∂λm
λ(r)| for all m = p, b, g.
We summarize the convergence of the distributed asynchronous supply andconsumption coordination applied for the dynamic case in the following theorem.
Theorem 5.8. Given knowledge of the dynamic stored energy in the storage devicezi(r), initial distribution charge λ(0) � 0, and suppose that assumption 4.3, 4.4,4.12, and 4.26 hold, then the error in the distribution charge estimation Δλ(r), thedeviation in the supply and consumption bid estimation Δxi(r), and the error in thegradient estimation Δl(r) converge to zero as r → ∞ for all i ∈ {1, 2, . . . , n}.
Proof. The proof is presented in [14].
5.5 Simulation results
Numerical testings are provided in this section in order: 1) to examine the con-vergence of the algorithms, 2) to show how the grid operators and the digesteroperator shall react on congestion, and 3) to study the fairness of the proposedalgorithms.
We determine the supply and consumption levels in a volume unit, i.e. Nm3
meaning that every m3 energy is considered at normal condition with the roomtemperature and the pressure of 1 atm. We simulate 25 identical biogas prosumersequipped with μ-CHPs and heat buffers. The characteristics of the μ-CHPs andheat buffers are provided in [70]. We use MATLAB 2012b to implement the model,YALMIP to formulate the distributed control problem, and Gurobi 5.5 to solve theoptimization problem.
5.5.1 Synchronous vs asynchronous updates
To illustrate the convergence of both distributed synchronous and asynchronouscoordination, we run simulations. In the synchronous scenario, each prosumer, theenergy grid operators, and the digester operator calculate their solutions at thesame iteration r. In the asynchronous scenario, the energy grid operators and thedigester operator perform their optimization when the iteration number r is uneven,whereas the prosumers perform their optimization when the iteration number ris even. The distribution charges are initially set at 0 e/Nm3. The evolution ofdistribution charges of the digester operator is shown in Figure 5.3. As expected,the convergence is faster when the updates are done synchronously (depicted bythe black line).

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
88 5. Asynchronous supply and consumption coordination of biogas prosumers
0 10 900 1050 1200 1350
0.0
0.1
0.2
0.3
0.4
Evolu
tion o
f dis
trib
ution c
harg
e (
Euro
/Nm
3)
Internal iteration
Synchronous update
Asynchronous update
Figure 5.3: Evolution of distribution charge provided by the digester operator. It needs,respectively, 991 and 1371 iterations to converge to the optimal distribution charge whenthe iterations are done synchronously and asynchronously.
5.5.2 Reaction on overloaded and underloaded grids
Now we show how the grid operators and the digester operator shall react on con-gestion. From Problem 5.6, it is clear that the distribution charges λp(k), λb(k), λg(k)
affect the total profit obtained by prosumers. The distribution charges are modifiedby the corresponding operator, based on the aggregated consumption bids from 25identical prosumers.
Figure 5.4a and Figure 5.4b show the evolution of the distribution chargeprovided by the digester operator and the aggregated biogas consumption bidsfrom 25 identical prosumers. In these two figures, the iterations r to modify thebids and the distribution charge are terminated when the successive updates of thedistribution charges are smaller than 0.001. The updates of the consumption bidsand the distribution charge are done locally and synchronously.
In Figure 5.4a, the distribution charge is initially set at 0.09 e/Nm3. Withthe initial distribution charge, all prosumers are not willing to utilize the biogasproduced by the central anaerobic digester, i.e. the aggregated consumption bidsat the first internal iteration is zero. The digester operator is then decreasing itsdistribution charge making it beneficial for the prosumers to utilize the producedbiogas.
In contrast, Figure 5.4b presents the reaction of the digester operator whenthe congestion is detected. The available biogas on the central anaerobic digesteris set at 36 Nm3. With the initial distribution charge set at 0.005 e/Nm3, theaggregated biogas consumption bid is 43 Nm3. The digester operator then increases

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.5. Simulation results 89
0 2 4 6 460 462 464 466
0.00
0.03
0.06
0.09
Internal iteration
Evolu
tion o
f dis
trib
ution c
harg
e (
Euro
/Nm
3)
0
15
30
45
Tota
l consum
ptio
n b
id (N
m3)
a. λq(0)=0.09 e/Nm3 and ξ=0.001
0 2 4 6 460 462 464 466
0.000
0.005
0.010
0.015
0.020
Internal iteration
Evolu
ation o
f dis
trib
ution c
harg
e (
Euro
/Nm
3)
0
15
30
45
Tota
l consum
ptio
n b
id (N
m3)
b. λq(0)=0.005 e/Nm3 and ξ=0.001
0 2 4 296 298 300
0.00
0.02
0.04
0.06
0.08
0.10
Internal iteration
Evolu
tion o
f dis
trib
ution c
harg
e (
Euro
/Nm
3)
0
15
30
45 Tota
l consum
ptio
n b
id (N
m3)
c. λq(0)=0.09 e/Nm3 and N=300
0 2 4 296 298 300
0.000
0.005
0.010
0.015
0.020
Internal iteration
Evolu
tion o
f dis
trib
ution c
harg
e (
Euro
/Nm
3)
0
15
30
45
Tota
l consum
ptio
n b
id (N
m3)
d. λq(0)=0.005 e/Nm3 and N=300
Figure 5.4: Reaction on underloaded and overloaded grids, with different initial val-ues of the distribution charge and different termination criteria. The evolutions of thedistribution charge provided by the digester operator are depicted by the black dots, whereasthe aggregated consumption bids from 25 identical prosumers are shown by the blue dots.The available biogas in the central anaerobic digester is set at 36 Nm3.
its distribution charge from the initial value to avoid overloads in the grid. Byreviewing Figure 5.4a next to Figure 5.4b, the two different initial distributioncharges result in the same optimal value of the distribution charge (0.0082 e/Nm3)and the same optimal aggregated biogas consumption bid (36 Nm3), when asufficiently small bound is used to terminate the iterations.
In addition, Figure 5.4c and Figure 5.4d show the evolution of the distributioncharge provided by the digester operator and the aggregated biogas consumptionbids from 25 identical prosumers, when a maximum number of iterations of 300is used to terminate the iterations in modifying the bids and the distributioncharge. With this stopping criterion, we only approximate the optimal consumption

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
90 5. Asynchronous supply and consumption coordination of biogas prosumers
bids (36 Nm3) with the aggregated consumption bids of 42.45 Nm3. In otherwords, by reviewing Figure 5.4a next to Figure 5.4c, the two different stoppingcriteria converge to different optimal value of the distribution charge and biogasconsumption bids.
5.5.3 Fairness
The limited biogas resource and grid capacities should be judiciously allocated andshared among the prosumers. With our setting, when prosumers a and b haveidentical profit function, i.e. Ua(k) = Ub(k), and their μ-CHPs and energy storagedevices have the same characteristics, they will react similarly to the distributioncharges provided by the digester operator and the energy grid operators. Thisequality is shown in Figure 5.5a, i.e., that prosumer 1 (depicted by the green dots)and prosumer 2 (presented by the blue dots) which react identically to the dynamicdistribution charge published by the power grid operator.
Moreover, the prosumers may have the capability to inject different amounts ofenergy than others. The evolutions of optimal supply bids on the power grid fromtwo prosumers with diverse capabilities are presented in Figure 5.5b. Prosumer 1has twice higher costs in producing and transmitting power to the associated gridthan prosumer 2. At the first 62 iterations, both prosumers react similarly to thedistribution charge published by the power grid operator. It is due to the fact thatthe charge is low (0.01 e/Nm3) making the prosumers interested in supplyingall available resource. The corresponding operator then increases its distributioncharge hence inducing the prosumers to reduce their supply bids. As shown inFigure 5.5b, because of its higher marginal profit, prosumer 2 gains higher optimalsupply levels.
5.6 Concluding remarks
We have modeled a community of biogas prosumers equipped with μ-CHPs, de-centralized gas storage devices, and heat buffers. The community owns a centralanaerobic digester and a central biogas upgrader and is embedded in the low-pressure gas grid and in the low-voltage power grid. We have proposed distributedsupply and consumption coordination among the prosumers, the energy grid oper-ators, and the digester operator. We have explicitly showed how the coordinationis done through bidirectional communication. With the associated algorithm, pro-sumers can locally manage their resource allocation. Yet, some coordination withthe energy grid operators and the digester operator is still necessary to obey thegrid capacity constraints.
Our finding that the asynchronous updates require a larger number of iterations

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
5.6. Concluding remarks 91
0 3 6 1194 1197 1200
0.00
0.01
0.02
0.03
Distribution charge
Prosumer 1
Prosumer 2
Internal iteration
Evolu
tion o
f dis
trib
ution c
harg
e (
Euro
/Nm
3)
0
3
6
9
Supply
level (N
m3)
a
0 3 6 1194 1197 1200
0.00
0.01
0.02
0.03
Distribution charge
Prosumer 1
Prosumer 2
Internal iteration
Evolu
tion o
f dis
trib
ution c
harg
e (
Euro
/Nm
3)
0
3
6
9
Supply
level (N
m3)
b
Figure 5.5: a The optimal supply levels and distribution charge in the power grid when twoprosumers are identical. b The optimal supply levels and distribution charge in the powergrid when prosumer 1 (green dots) has twice higher costs in producing and transmittingpower to the associated grid than prosumer 2 (blue dots).
to converge to the optimal solution than the synchronous updates is supported byour numerical testing in Subsection 5.5.1. When the operators detect overloadedgrids, they increase their distribution charges from the initial values. Otherwise,they decrease the charges with zero as a lower bound. These facts are confirmed inSubsection 5.5.2. The observations provided in Subsection 5.5.3 indicate that theproposed coordination framework takes into account the individual characteristicand capability of each prosumer when providing some amount of energy to thecorresponding grids.
Heat can be effectively stored for a long period. However, as the heat bufferhas a maximum capacity, the excess heat is wasted. It is therefore of interest forfuture work to embed the prosumers in some heating network in order to use thewaste heat of the μ-CHPs. An examination of the practical control considerationsdue to the on-off restriction of the μ-CHP on the proposed model is also interestingfor further research.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 6Asynchronous distributed control of the energy
supply-demand balance

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 6
Asynchronous distributed control of theenergy supply-demand balance
In Chapter 4, the agents exchange iteratively and asynchronously their controllableinputs, i.e. supply levels, to the connected grid operators when searching for theiroptimal supply levels. We extend the method and algorithm proposed in Chapter4 for also exchanging the agents’ states. We implement them for a communityof biogas prosumers possessing capabilities to control their supply and demandprofiles. The prosumers are embedded in multiple energy grids. The prosumerscommunicate their states, i.e. imbalance between biogas supply and demand, witheach other enabling them to minimize the imbalance within the community. Whenthe prosumers aim at creating some revenue by selling their energy to the energygrids, the prosumers must coordinate their supply bids to the corresponding energygrid operators. In this way, the grid operators can ensure that their grid capacityconstraints are obeyed.
The rest of the chapter is organized as follows. In Section 6.1, we introducethe problem setting of the considered community. The technical constraints ofthe prosumers are shown in Section 6.2. The constraints of external energy gridsembedded in the micro grid of prosumers, including a power grid, gas grid, and gasfilling station are described also in the section. We define the optimal supply anddemand control formulated in the MPC framework and propose the correspondingalgorithms to solve the optimization problem in a distributed manner in Section6.3. In Section 6.4, we incorporate the asynchronous exchange information schemeon the algorithms and prove their convergence. Numerical results for various casesusing realistic data are presented in Section 6.5, followed by some discussion whichis provided in Section 6.6.
6.1 Problem setting
There have been a significant number of studies on congestion control mechanismsfor large-scale energy networks. See, e.q.,[42], [81], [31], for instance. Themechanisms deal with the problems of controlling the supply and demand levelsof distributed generation and active demand units such that the associated utilityfunctions are maximized under technical constraints. Equipped with energy storage

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
94 6. Asynchronous distributed control of the energy supply-demand balance
devices, the optimization problem of the units take the dynamic states of the storagedevices into account explicitly [22], [18].
The impacts of the integration of the distributed generation and active demandunits in the existing energy grids have been studied in, e.g., [22], [93], and [103].Due to practical and computational limitations, most of the studies solve theaforementioned optimization problem in a distributed manner, with an assumptionthat all units and the energy grid operators update their systems, i.e. by calculatingand (partly) communicating their controllable inputs and states, at the same time.
Practically, they do not have a common clock to update their systems. As aresult, they solve their local optimization problems based on outdated information.Motivated by [76], the convergence of asynchronous distributed supply coordina-tion for controlling the supply rates of dynamic agents which are embedded inmultiple grids has been provided in [14]. The agents communicate their supplyrates, which are their controllable inputs, to the corresponding energy grid oper-ators. The operators then share a dynamic price as a function of excess supplyin regards to their grid capacity constraints. With this setting, the grid capacityconstraints are obeyed while maximizing the agents’ utility.
Here we extend the work in [14] for asynchronous updates of both inputs andstates. Consider, e.g., the local imbalance between supply and demand as a state.The state is coordinated among agents, within a community for instance, in orderto minimize the whole imbalance in the community. We prove the convergence ofinput and state asynchronous updates under the assumptions that: a) the units’ utilityfunction are increasing, strictly concave, and twice differentiable, b) the curvaturesof the utility functions are bounded away from zero, and c) the consecutive updatesdone by the units and the energy grid operators are upper bounded.
We implement the algorithms of our proposed state and input asynchronousupdates for a micro grid which consists of the units equipped with distributedgenerations by means of micro Combined Heat and Power (μ-CHP) devices, heatbuffers, and decentralized gas storage devices. The μ-CHP devices run on biogasgenerated from organic waste using local anaerobic digesters [56], [104]. Thebiogas μ-CHP devices are switched on to satisfy the local power and heat demand.Here we assume that some part of heat demand can be shifted in time. Furthermore,the units have capability to control the power and heat output from the μ-CHPdevices. Hence, in what follows we call them (active) prosumers, as they are ableto control both production and demand sides. A schematic illustration of suchprosumers is shown in Fig. 1.
Specifically, we consider a situation where a large number of prosumers build amicro grid. Within the micro grid, the prosumers can contribute to balance betweensupply and demand hence increasing the value of the produced renewable energyand reducing the energy losses. When there are some amounts of excess biogasafter fulling the demand of the micro grid, the prosumers may inject the biogas to

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.1. Problem setting 95
Micro- CHP
Heat buffer
Space heating
District heating system Low voltage power grid
Digester
Gas storage
Fuel cell
Upgrader
Gas filling station
Low pressure gas grid
Prosumer i
Biogas Heat Power Green gas
Figure 6.1: The schematic illustration of a prosumer equipped with an anaerobic digester,decentralized gas storage device, fuel cell, micro-CHP, and heat buffer. It is embedded in alow pressure gas grid, low voltage power grid, district heating system, and gas filling station.
a low-pressure gas grid and/or may sell it to a gas filling station. The technicalchallenges for such gas injection are stated in [88]. Furthermore, the power outputfrom the μ-CHP devices can be sold to a low-voltage power grid to satisfy theassociated demand elsewhere [93], [103]. With the existing energy grids, theprosumers are allowed to create some revenue. Of course, when the prosumershave lack of the power and heat, i.e. due to the fact that the biogas productionlevel highly depends on the agricultural seasons and weather conditions, we allowthe prosumers to import some energy from the external energy grids. Nevertheless,the capacities of the energy grids are limited thereby restricting the amount ofenergy injected and imported from the grids.
Inspired by [15], [70], [49], [73], [75], and [57], the objectives of the pro-sumers are a) to minimize the imbalance between supply and demand in the microgrid, b) to maximize the projected revenue of the prosumers gained by sellingtheir surplus energy to the existing energy grids, c) to minimize the associated

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
96 6. Asynchronous distributed control of the energy supply-demand balance
costs, and d) to maintain their comfort levels regarding the shifting loads, subjectto the time-varying capacities of the energy grids, the individual constraints anddynamic states of the prosumers. We use an imbalance information proposed in[68] allowing the prosumers to track the imbalance of their connected prosumersin the micro grid. In this way, the prosumers can coordinate their decisions in orderto maintain the balance between supply and demand within the micro grid. Asalso done in [15], [70], and [57], we formulate the optimization problem in theMPC framework enabling the prosumers to easily adapt predicted fluctuations inthe energy grids and in the local load profiles. We refer the reader to, e.g., [35],for the detailed explanation of the MPC approach. We solve the MPC problem ina distributed manner. We allow the prosumers and the energy grid operators tocoordinate their decision variables to each other asynchronously. Dynamic pricingmechanisms are here utilized to: a) coordinate the imbalance between biogassupply and demand hence minimizing the imbalance within the micro grid and b)coordinate the supply levels of the excess biogas from the prosumers to the energygrid operators thus avoiding overloading grids while maximizing and minimizingthe prosumers’ expected revenue and associated costs, respectively.
Our proposed algorithms for distributed asynchronous coordination amonga prosumer, its neighboring prosumers, and energy grid operators are given asfollows: Each energy grid operator determines whether its grid overloads accordingto the estimates of the aggregated supply levels from all prosumers. A dynamicprice, i.e. the congestion price associated with the limited capacity of the energygrids, is updated as a function of excess supply. Specifically, the congestion priceincreases from its initial value during overloading. The updated congestion pricesare communicated with the connected prosumers. Based on: the estimates of thelatest congestion prices from the energy grid operators and the recent estimatesof the imbalance information from its neighboring prosumers, each prosumercalculates its imbalance information and its shadow price corresponding to theexpected imbalance in the micro grid. The prosumers then communicate thecalculated variables to its neighboring prosumers and its connected energy gridoperators. Under such a scheme, the prosumers locally and asynchronously optimizetheir supply and demand levels based on local information, yet some coordinationwith the energy grid operators and some communication with the neighboringprosumers are still necessary to obey the grid capacity constraints and to keep trackon the imbalance in the micro grid.
6.2 System model
We first develop a model of a micro grid consisting of prosumers. The prosumersare equipped with a local anaerobic digester, a fuel cell, a biogas storage device, a

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.2. System model 97
μ-CHP device, and a heat buffer. They have local power and heat demands. Theyare embedded in a low-pressure (LP) gas grid, a low-voltage (LV) power grid, andcoupled to a gas filling station. The schematic illustration of such a prosumer ispresented in Fig. 1. The technical constraints and dynamics of the prosumers aredescribed in Section II-A. We explain the role of the three aforementioned externalenergy grids in Section II-B. We assume that the strategy of the prosumers is tomaximize their revenue, to minimize the associated costs, to minimize the overallbiogas imbalance in the micro grid, and to maintain the heat comfort level of theprosumers, as described in Section II-C.
6.2.1 A micro grid of prosumers
A prosumer i ∈ {1, . . . , n} has its local heat demand hd,i(k) ∈ R�0 and local powerdemand pd,i(k) ∈ R�0 at time k ∈ {1, . . . ,K}. The prosumers aim at locallyfulfilling the heat and power demands by producing the energy using their μ-CHPdevices running on biogas. The biogas is generated from prosumers’ organic wasteusing the local anaerobic digester. See [56] for the detailed anaerobic digestionprocess. In this way, the value of the produced biogas is increased and some lossesdue to the energy transmission can be reduced.
Produced from the organic waste, it can be argued that the biogas productionlevel varies depending on weather conditions and agricultural seasons. Equippedwith a decentralized gas storage device, the prosumers can better cover their localenergy demands againts the uncertain biogas production pi(k) ∈ R�0. Define theamounts of biogas taken from the storage device as ui(k) ∈ R�0. Given the initialvalue of the stored biogas in the storage device denoted by zg,i(1), the dynamics ofthe available biogas in the device zg,i(k) ∈ R�0 is specified by
zg,i(k + 1) = zg,i(k) + pi(k)− ui(k). (6.1)
Suppose that Si is the maximum capacity of the biogas storage device. Then theavailable biogas in the device is bounded by
0 � zg,i(k) � Si. (6.2)
The biogas available in the storage device can be used for the following pur-poses.
• It can be used as a fuel for running the μ-CHP devices in order to satisfythe prosumers’ local heat and power demands [67]. It can also be used tohelp the connected prosumers to satisfy their local demands. Define theamounts of biogas needed to run the μ-CHP device and to help the connectedprosumers as qi(k) ∈ R�0.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
98 6. Asynchronous distributed control of the energy supply-demand balance
• The stored biogas can be sold to the gas filling station at gi(k) ∈ R�0 using alorry and/or to the LP gas grid at fi(k) ∈ R�0 [88]. The station and grid mayhave different capacities, selling price patterns, and associated costs.
• The stored biogas can be converted into electrical energy using a fuel cell.The produced electricity can then be sold to an LV power grid. The amountof biogas is denoted by ei(k) ∈ R�0.
With the aforementioned purposes of the stored biogas in the storage device,we have
ui(k) = qi(k) + fi(k) + gi(k) + ei(k). (6.3)
Due to gas quality requirements for the grid injections, the biogas being soldto the gas filling station and to the LP gas grid needs to be upgraded to green gas.Because of high investment cost, the prosumers in a micro grid may build a centralbiogas upgrader [89]. As the upgrader has a production capacity of Fg ∈ R�0, wehave
n∑i=1
fi(k) + gi(k) � Fg. (6.4)
Remark 6.1. Besides using the fuel cell, the conversion from biogas into electricalenergy can also be done by the μ-CHP devices, which will be described shortly inthe next paragraph. Nevertheless, we here assume that the power output from theμ-CHP device is only for satisfying the local power demand and the power outputfrom the fuel cell is only for creating some profit by selling the produced electricalenergy to the LV power grid.
A μ-CHP device mainly consists of a prime mover and an auxiliary burner.Among the prime mover technologies, a proton exchange membrane fuel cell(PEMFC) prime mover is commonly chosen as it has the highest electric efficiencyamong other prime mover technologies and provides low emissions [57]. The primemover can produce heat and electricity at the same time k. When the prime moveris controlled based on power demand, the heat output at a level of hpm,i(k) ∈ R�0
fluctuates accordingly. Otherwise, when the prime mover is controlled based onheat demand, the power output at a level of ppm,i(k) ∈ R�0 from the prime moverfluctuates accordingly. As the power output and heat output from the prime moverare coupled, we have
hpm,i(k) =ηh,iηp,i
ppm,i(k), (6.5)
where ηp,i ∈ (0, 1] and ηh,i ∈ (0, 1] are the power and heat output efficiencies,

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.2. System model 99
respectively. The power output should satisfy its lower limit pminpm,i ∈ R�0 and its
upper limit pmaxpm,i ∈ R�0, as the prime mover has a production capacity. Hence,
pminpm,i � ppm,i(k) � pmax
pm,i. (6.6)
When the power output from the prime mover cannot satisfy the local powerdemand, the prosumers import some amounts of power from the external powergrid at pimp,i(k) ∈ R�0, i.e.
pd,i(k) = ppm,i(k) + pimp,i(k). (6.7)
The parameters in (6.7) are in kWh. As the local power demand pd,i(k) is a givenvalue at each time k, we can choose either the amount pimp,i(k) or ppm,i(k) to bethe controllable input.
In contrast to the prime mover, the auxiliary burner of the μ-CHP device onlygenerates the heat output at haux,i(k) ∈ R�0. The heat output can vary betweenthe minimum capacity hmin
aux,i and the maximum capacity hmaxaux,i, thus
hminaux,i � haux,i(k) � hmax
aux,i. (6.8)
Prosumers turn on the auxiliary burner in the case of high heat demand. In thisway, undesirable fluctuating power output from the prime mover is avoidable.
To mitigate the fluctuating heat output from the prime mover due to the power-led control, prosumers can utilize local heat buffers. A hot water tank can be arealistic heat buffer for residential buildings. Given the initial value of stored heatin the heat buffer zh,i(1), we define the dynamics of available heat zh,i(k) ∈ R�0
in the heat buffer of prosumer i by a linear model specified by
zh,i(k + 1) = zh,i(k) + hpm,i(k) + haux,i(k)− hd,i(k). (6.9)
The heat buffer has its lower bound zminh,i and upper bound zmax
h,i thereby
zminh,i � zh,i(k) � zmax
h,i , (6.10)
where zmin(max)h,i = micpΔT
min(max)i with mi is the mass of water, cp is heat
constant, and ΔTmin(max)i is the difference between the inside room temperature
and the minimum (maximum) temperature of the water.In the case that there exists excess heat due to the power-led control of the
prime mover and there is no remaining space in the heat buffer, the excess heatmust be disposed in, e.g., some district heating systems. We do not associate thedisposal with any costs.
Here, we refer to the heat consumption for space heating systems as the local

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
100 6. Asynchronous distributed control of the energy supply-demand balance
heat demand hd,i(k). The systems are designed to guarantee a comfortable roomtemperature range. Equipped with these systems, the prosumers can contributeto minimize the mismatch between the available biogas and the heat demand bymeans of demand response [23], [99]. Define Tin,i(k) ∈ R�0 and Tout,i(k) ∈ R�0
as the temperature at time k inside and outside a room of prosumer i, respectively.As in [73] and [99], the dynamics of the inside temperature Tin,i(k) ∈ R�0 isdefined by
Tin,i(k + 1) =
Tin,i(k) + α (Tout,i(k)− Tin,i(k)) + βhd,i(k), (6.11)
given the initial inside temperature Tin,i(1), with α > 0 and β > 0 represent thethermal characteristics of the heater and prosumer i’s room, respectively. Eachprosumer has its comfortable range of inside temperature specified by [Tmin
in,i , Tmaxin,i ].
Consequently,
Tminin,i � Tin,i(k) � Tmax
in,i . (6.12)
As stated earlier, one of the prosumers’ control goals is to minimize the biogasimbalance within the micro grid. It corresponds to adjusting the biogas supply anddemand. When calculating the imbalance dynamics xi(k) of prosumer i, we onlyconsider the amounts of biogas needed to satisfy the local heat and power demandsand we exclude the amounts of biogas sold to the LP gas grid, to the gas fillingstation, and to the LV power grid. Given the initial value of the imbalance xi(1),we specify the dynamics of prosumer’s biogas imbalance as the difference equationgiven by
xi(k + 1) = xi(k) + qi(k)− 1
ηp,ippm,i(k)− 1
ηaux,ihaux,i(k), (6.13)
where ηaux,i ∈ (0, 1] is the efficiency of heat output produced from the auxiliaryburner of the μ-CHP device of prosumer i. Eq. (6.13) shows that prosumer i keepstrack on its own imbalance xi(k). However, as the prosumers aim at minimizingthe overall biogas imbalance within the micro grid, they need to keep track onother prosumers’ imbalance as well.
Now define the imbalance information of prosumer i as xi(k). This informationdepends on other prosumers’ imbalance information. Then by referring to [68],given the initial value of the imbalance information xi(1), the dynamics of the

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.2. System model 101
imbalance information xi(k) is given by
xi(k + 1) =
Aiixi(k) +∑j =i
Aijxj(k) + qi(k)− 1
ηp,ippm,i(k)− 1
ηaux,ihaux,i(k), (6.14)
where Aii and Aij weight, respectively, the biogas imbalance information of pro-sumer i itself and the information obtained from its neighboring prosumers j. Thevalue of qi(k) may be higher than the summation of 1
ηp,ippm,i(k) and 1
ηaux,ihaux,i(k),
when prosumer i aims at providing some amount of biogas to its neighboring pro-sumers.
Define the vectors x(k) = [x1(k), . . . , xn(k)]T , q(k) = [q1(k), . . . , qn(k)]
T , ppm(k) =
[ppm,1(k), . . . , ppm,n(k)]T , haux(k) = [haux,1(k), . . . , haux,n(k)]
T . We can rewritethe dynamics (6.14) in a more compact form as
x(k + 1) = Ax(k) + q(k)−Bppm(k)− Chaux(k), (6.15)
where the weights Aii and Aij are the elements of imbalance information matrixA ∈ R
n×n and B and C are the appropriate time-invariant matrices of vectorsppm(k) and haux(k), respectively. According to [69], there are four restrictions indesigning the entries of the imbalance information matrix A, given by
• R1: Aij = 0 if and only if there is imbalance information exchanged fromprosumer j to i.
• R2: Aij � 0, i, j = 1, . . . , N .
• R3:∑
j Aij = 1, j = 1, . . . , N .
• R4: The graph corresponding to the matrix A is strongly connected.
Given that the initial value of the imbalance information is equal to the initialvalue of the physical imbalance, i.e. x(1) = x(1), and suppose that restrictionsR1-R4 hold, the total imbalance information in the micro grid is equal to the totalphysical imbalance in the micro grid, i.e.
∑ni=1 xi(k) =
∑ni=1 xi(k) [69]. It is
however not necessary to have xi(k) = xi(k) at each time k.
6.2.2 External energy grids
To support a sustainable and environmental-friendly energy sources, it is desirablethat the biogas prosumers are connected to an LP gas grid [88]. One can see thatthe gas grid acts as sink for prosumers to create revenue from excess biogas. Asmentioned earlier, the biogas needs to be upgraded to green gas with an efficiency

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
102 6. Asynchronous distributed control of the energy supply-demand balance
ηu ∈ (0, 1] before injecting it into the gas grid. Due to a limited capacity of the gasgrid which is denoted by F (k), the aggregated green gas supplied by prosumers islimited by
n∑i=1
ηufi(k) � F (k). (6.16)
The prosumers may also create some revenue by transporting the green gasusing a lorry to the gas filling station. However, the gas filling station has amaximum capacity which is specified by G(k). Thus, we have the followinginequality constraint given by
n∑i=1
ηugi(k) � G(k). (6.17)
Remark 6.2. It is worthwhile to note that the produced green gas needs to becompressed in order to use less space for transporting green gas to the gas fillingstation. However the compressor has a limited capacity, denoted by Lc. As theprosumers aim at creating as much revenue as possible by injecting the producedgreen gas to both the LP gas grid and to the gas filling station, sufficiently largecapacities of the central biogas upgrader and green gas compressor are thereforechosen. The bottleneck for injecting the green gas is then constraints (6.16)-(6.17),not constraints (6.4) and the capacity Lc.
Due to the decrease of conventional energy production coupled with the drivetowards a low-carbon economy, it is desirable that the renewable prosumers are notonly connected to the gas grid, but also to the power grid. When the selling price ofthe power grid is appealing, the prosumers may produce power output by switchingon their fuel cells. The produced power output is then sold to the LV power gridhence creating some profit. Nevertheless, the power grid has a time-varying limitedcapacity which is denoted by E(k). It thus restricts the aggregated power supplylevel from the prosumers, given by
n∑i=1
ηe,iei(k) � E(k), (6.18)
where ηe,i ∈ (0, 1] is an efficiency of the fuel cell owned by prosumer i.
The constraints (6.18) are in fact nonlinear, dependent on the distribution factorand nodal injection [65], [60]. We however assume these to be external signals,thus allowing us to write J(k) as a time-varying bound.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.2. System model 103
6.2.3 Objectives
Each prosumer may have different choices on how to utilize their biogas and onhow to cover its local power and heat demands. In particular, the prosumers canuse their biogas to turn the μ-CHP devices on, to create revenue by upgrading andselling biogas to the LP gas grid and to the gas filling station, and/or to convert itinto electrical energy and then sell it to the LV power grid. They can locally covertheir power demand from the prime mover of their μ-CHP devices and/or from theexternal power grid. They can satisfy their local heat demand from the heat outputof the auxiliary burner and/or from the stored heat in the heat buffers. See againFig. 1.
With those aforementioned choices, the prosumers may have a multi-variableoptimization problem. Define the gas filling station as grid g, the LP gas grid asgrid f , and the LV power grid as grid e. As in [15], [70], [49], [73], [75], [68],and [57], for k ∈ {1, . . . ,K} and i ∈ {1, . . . , n}, define the following quantities:
• U1,i = −cx,ixi(k)2, where cx,i > 0 indicates the relative importance of mini-
mizing the imbalance compared to other control goals. When the imbalanceminimization is the most important consideration, one can set the associatedweight higher than other weights.
• U2,i =∑
m=f,g,e(rm(k) − cm,i(k))ηm,imi(k) − ctm,i(k)(ηm,imi(k))2, where
rm(k) ∈ R�0 is the selling price on the grid m, cm,i(k) ∈ R�0 is the costproducing energy output at a level of mi(k), ctm,i(k) ∈ R�0 is the costassociated with transmission losses of mi(k), and ηm is the efficiency of theassociated converters, upgraders, and compressors. As stated in Subsection6.2.2, we have ηg,i = ηf,i = ηu.
• U3,i(k) = −hihaux,i(k)2, where hi > 0 represents the relative importance of
minimizing the cost related to turning on the auxiliary burner compared toother control goals. The quantity U3,i(k) will be included as one of prosumers’objectives to ensure that the auxiliary burner of their μ-CHP devices is onlyswitched on to meet the heat storage constraints.
• U4,i(k) = −(cp,i(k)(pd,i(k)− ppm,i(k)) + ctp,i(k)(pd,i(k)− ppm,i(k))2), where
cp,i(k) ∈ R�0 indicate the prices for buying power from the power grid,whereas ctp,i(k) ∈ R�0 specify the costs of transmission losses for importingsome amount of power from the LV power grid.
• U5,i(k) = −(czgg,i(k)zg,i(k)+czg,i(k)zg,i(k)2+czhh,i(k)zh,i(k)+czh,i(k)zh,i(k)
2),representing opportunity cost as a function of zg,i(k) and zh,i(k), whereczgg,i(k) ∈ R+ and czhh,i(k) ∈ R+.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
104 6. Asynchronous distributed control of the energy supply-demand balance
• U6,i(k) = −(ta(Tin(k) − Ta(k))2), ta > 0 defines the relative importance of
maintaining the inside temperature close to the given target Ta(k) comparedto other control goals.
• U7,i(k) = −(chd,ihd,i(k)
2 + cqiqi(k)2), where chd,i
and cqi are the costs asso-ciated with utilizing heat from the heat buffer and the produced biogas forrunning μ-CHP devices, respectively.
With a given time horizon K, the multi-variable optimization problems aresubject to all constraints (6.1)-(6.3), (6.5)-(6.12), (6.14), and (6.16)-(6.18), i.e.
Problem 6.3.
maximizeK∑
k=1
n∑i=1
7∑l=1
Ul,i(k)
subject to (6.1)− (6.3), (6.5)− (6.12), (6.14), and (6.16)− (6.18).
In order to write Problem 6.3 in a compact form, define the vectors
zi(k) = [zg,i(k), zh,i(k), Tin,i(k), xi(k)]T ,
yi(k) = [ppm,i(k), haux,i(k), fi(k), gi(k), ei(k), hd,i(k), qi(k)]T ,
wi(k) = [pi(k), 0, αTout,i(k),∑j =i
Aij xj(k)]T ,
bi(k) = [pd,i(k)− pimp,i(k), himp,i(k)]T ,
h(k) = [F (k), G(k), E(k)]T ,
Di =
⎡⎢⎢⎣
1 0 0 0
0 1 0 0
0 0 (1− α) 0
0 0 0 Aii
⎤⎥⎥⎦ ,
Ji =
⎡⎢⎢⎢⎣
0 0 −1 −1 −1 0 −1ηh,i
ηp,i1 0 0 0 −1 0
0 0 0 0 0 β 0
− 1ηp,i
− 1ηaux,i
0 0 0 0 1
⎤⎥⎥⎥⎦ ,
Fi =[1 0 0 0 0 0 0
],
Hi =
⎡⎣ 0 0 ηu 0 0 0 0
0 0 0 ηu 0 0 0
0 0 0 0 ηe,i 0 0
⎤⎦ .

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.2. System model 105
We then have a compact form of Problem 6.3 given by
maxzi(k),yi(k)
K∑k=1
n∑i=1
Ui(zi(k), yi(k))
subject to zi(k + 1) = Dizi(k) + Jiyi(k) + wi(k),n∑
i=1
Hiyi(k) � h(k), Fiyi(k) = bi(k).
(6.19)
and boundary conditions on zi(k) ∈ Zi and yi(k) ∈ Yi, with Ui(zi(k), yi(k)) =∑7l=1 Ul,i(zi(k), yi(k)), where Zi and Yi are intervals, i.e. Zi = [zi, zi] and Yi =
[yi, yi], respectively. One can consider wi(k) as an external signal of prosumer i.
Inspired by [46], the problem stated in (6.19) can be rewritten in a morecompact form for each time k as
maxai∈Ai
n∑i=1
Ui(ai)
subject to Ciai = ci,n∑
i=1
Niai � d,
(6.20)
where we stack the variables over time in the vector ai, i.e., in the case of, e.g.,K = 3, we have
ai = [yi(1), zi(2), yi(2), zi(3)]T ,
ci = [bi(1), Dizi(1) + wi(1), bi(2), wi(2)]T ,
d = [h(1), h(2)]T , Ci =
⎡⎢⎢⎣
Fi 0 0 0
−Ei I 0 0
0 0 Fi 0
0 −Di −Ei I
⎤⎥⎥⎦ ,
Ni =
[Hi 0 0 0
0 0 Hi 0
],
with zi(1) is the initial value of available energy in the storage devices. This is aconvenient form for notational purposes further on in the paper.
When the utility function Ui(ai) is a concave function and the constraints in theproblem (6.20) as well as the boundary conditions on ai ∈ Ai are compact andconvex, we obtain a unique maximizer ai at most [30].

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
106 6. Asynchronous distributed control of the energy supply-demand balance
6.3 Optimal supply and demand control
Here we formulate our optimal control problems in model predictive control (MPC)framework. In this section, we also propose the corresponding algorithms to solvethe problem (6.20) in a distributed fashion.
6.3.1 Model predictive control
To handle all technical constraints and to anticipate on the future situation of theexternal energy grids and local load profiles, problem (6.20) is solved using an MPCapproach. See, e.g., [35], for the detailed explanation of the approach. With thisapproach, the utility is maximized over a prediction horizon T given the estimatesof future conditions in the LV power grid, the LP gas grid, the gas filling station, andthe local heat and power demands. From the sequence of optimal solutions overprediction horizon T , only the optimal solution of the first step is applied. At thenext time step the optimization problem is re-solved and, again, only the solutionof the first step is implemented. In what follows, we call the utility function Ui(ai)
as the total profit.Let Ui(ai) be the predicted profit of prosumer i. Over a given prediction horizon
T , the MPC problem is given by
maximizeai(k)∈Ai
k+T∑τ=k
n∑i=1
Ui(ai(τ)) (6.21)
subject to
n∑i=1
Ni(τ)ai(τ) � d(τ), (6.22)
Ci(τ)ai(τ) = ci(τ), (6.23)
and boundary conditions ai(τ) ∈ Ai for all τ = k, . . . , k + T . The hat notations aredefined to distinguish the prediction parameters from the system model parametersand τ = k, . . . , k + T is a new time variable introduced to distinguish between thesystem time k and the prediction time τ .
It is foreseen that the future energy grids become highly complex systems asthey have bidirectional energy flows due to the integration of the prosumers inthe existing energy grids. Solving such a large optimization problems for a hugenumber of producers and consumers in a centralized manner is time consumingand does not scale well due to the computational complexity [61]. Moreover,the nature of the problem requires a distributed controller, that each prosumer i

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.3. Optimal supply and demand control 107
locally decides its supply and demand levels based on its own local information,yet some coordination with the energy grid operators and some communicationwith its neighboring prosumers are still necessary to avoid overloading grids and tokeep track on the overall imbalance in the micro grid, respectively. It is thereforeimpractical to solve problem (6.21) in a centralized manner. In what follows, wesolve problem (6.21) in a distributed fashion, thereby allowing the prosumerscontrol their supply and demand levels locally.
6.3.2 Distributed MPC problem
As proposed in [52] and [51], we combine a dual decomposition approach withthe gradient projection method to decouple problem (6.21). The feasibility andstability of the distributed MPC approach have been studied in [52] and [51] aswell. Let vi(τ) be the influence prosumer i expects to receive from its neighboringprosumers in the micro grid, given by
vi(τ) =∑j =i
Aij xj(τ). (6.24)
Hence, the imbalance information (6.14) becomes
xi(τ + 1) =
Aiixi(τ) + vi(τ) + qi(τ)− 1
ηp,ippm,i(τ)− 1
ηaux,ihaux,i(τ).
Now, compile the variables ai(τ) and vi(τ) together in si(τ), i.e. si(τ) =
[ai(τ), vi(τ)]T .
Remark 6.4. In the objective function of problem (6.21), we put an additionalterm, i.e. wv,i(vi(τ)−
∑j =i Aij xj(τ))
2 where wv,i is a weighting factor. Hence, itresults in new profit functions given by Vi(si(τ)). With this additional term, weensure that the convexity and differentiability arguments of the new variable statedin (6.24) hold. Adding the additional term wv,i(vi(τ) −
∑j =i Aij xj(τ))
2 in theoriginal problem (Problem 6.3) will result in no difference in the optimal solutions,as at optimality vi(τ) =
∑j =i Aij xj(τ) due to the constraint (6.24).
We then define a Lagrangian function L associated with the coupling constraints

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
108 6. Asynchronous distributed control of the energy supply-demand balance
(6.22) and (6.24) with dual variables λa(τ) and λi(τ), respectively, as
L =
k+T∑τ=k
n∑i=1
Vi(si(τ))− λTa (τ)
(n∑
i=1
Ni(τ)ai(τ)− d(τ)
)
+ λi(τ)
⎛⎝vi(τ)−
∑j =i
Aij xj(τ)
⎞⎠
=
k+T∑τ=k
n∑i=1
Vi(si(τ))− λa(τ)T
(n∑
i=1
Ni(τ)ai(τ)− d(τ)
)
+ λi(τ)vi(τ)−∑j =i
λj(τ)Aij xi(τ). (6.25)
Note that ai and the dual variable λa are column vectors.The objective function of the dual problem is given by
D = maxsi∈Si
L
=
n∑i=1
Wi + λTa (τ)d(τ), (6.26)
where
Wi = maxsi∈Si
Vi(si(τ))− λa(τ)TNi(τ)ai(τ)
+λi(τ)vi(τ)−∑j =i
λj(τ)Aij xi(τ), (6.27)
representing the exact profit function of prosumer i, given the dual variablesλa(τ) = [λf (τ), λg(τ), λe(τ)]
T from the associated grid operators f, g, e, the dualvariable λj , and influence xj from the neighboring prosumers. From (6.26), weobtain the dual problem defined by
Problem 6.5.
minimizeλa,λi
D
subject to the constraints (6.23) and boundary conditions si(τ) ∈ Si, whereSi = [si, si] and λa is a non-negative column vector. The optimality conditions ofthe dual problem can be directly obtained from KKT Theorem [30].
Remark 6.6. The dual variable λm from the associated grid operator m ∈ {f, g, e}

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.3. Optimal supply and demand control 109
can be interpreted as the distribution charge for the transport and system serviceswhich are utilized by prosumers when injecting their energy to the associatedgrid. In what follows, we call the dual variables as the distribution charges. Sincethe changes are functions of excess supply, the distribution charges might bemeasured in monetary unit per a unit of energy flow. The distribution charges aremodified by associated energy grid operators and are uniform for all prosumersconnected. When overloading, the distribution charges increase from their initialvalues. Otherwise, they decrease with zero as a lower bound.
Remark 6.7. As in [68], the dual variable λi can be interpreted as shadow priceswhich are functions of the deviation between the expected and real influenceprosumer i expects from its neighboring prosumers.
To solve Problem 6.5, we use a gradient projection method. The distributioncharges λm(τ) are initially set at some non-negative value. Define the index r isinternal index iteration between times τ and τ + 1. For all τ = k, . . . , k + T , thedistribution charges and the shadow prices are updated based on
λτm(r + 1) = λτ
m(r) + γrm
[n∑
i=1
ηmmτi (r)− Mτ
i
], (6.28)
λτi (r + 1) = λτ
i (r) + γri
⎡⎣vτi (r)−∑
j =i
Aij xτj (r)
⎤⎦ , (6.29)
for each grid operator m ∈ {f, g, e} and each prosumer i ∈ {1, . . . , n}. Note that,e.g., for the gas grid operator m = f , we have M = F which is the limited amountof green gas that can be injected in the gas grid (as in (6.16)). The parametersγrm, γr
i > 0 are time-varying step sizes. The choices on the step sizes are givenin [30]. The iterations are terminated when the successive updates of the dualvariables are smaller than some small bounds and the grid capacity constraints aresatisfied.
When the prosumers and the energy grid operators have a common clock, theupdates (6.28)-(6.29) can be done synchronously at each iteration step r. Inpractice, they may not update their systems synchronously due to a time delay, orsimply because they do not have access to a common clock. Hence, we implement ascheme of asynchronous exchange information in solving Problem 6.5 and providethe corresponding algorithm in the following section.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
110 6. Asynchronous distributed control of the energy supply-demand balance
6.4 Asynchronous distributed optimal supply and de-mand control
Inspired by [76], here we incorporate the asynchronous setting in the distributedoptimal supply and demand control proposed in Subsection 6.3.2. Assumptionson the asynchronous setting are stated throughout this section. The detailedalgorithms for each prosumer and energy grid operator as well as their convergenceproofs are provided in this section.
Consider the fact that the prosumers and the energy grid operators have diverseclocks to update their systems. For notational convenience, consider the case attime τ . In the asynchronous setting, it is required for
• each energy operator m ∈ {f, g, e} to estimate the aggregated supply bidsfrom all prosumers by
n∑i=1
mi(r) =
n∑i=1
r∑r′=r−ro
bb(r′, r) · mi(r′), (6.30)
with∑r
r′=r−robb(r′, r) = 1 denoting the weighting factor of the aggregated
supply bids received by the grid operators m and mi(r′) is the received supply
bids at time r′ ∈ [r − r0, r] from prosumer i,
• each prosumer i to estimate a) the distribution charges by
λm(r) =
r∑r′=r−ro
eei(r′, r) · λm(r′), (6.31)
for all m = f, g, e, b) the shadow price from the neighboring prosumers by
λj(r) =
r∑r′=r−ro
ooi(r′, r) · λj(r
′), (6.32)
and c) the connected prosumers’ imbalance information by
xj(r) =
r∑r′=r−ro
uui(r′, r) · xj(r
′), (6.33)
based on their current knowledge. mi(r′) is the received supply bids at time
r′ ∈ [r−r0, r] from prosumer i. λm(r′), λj(r′) and xj(r
′) are the distribution charge,the shadow price from the neighboring prosumer, and the connected prosumers’imbalance information received by prosumer i at time r′ ∈ [r − r0, r], respec-tively.
∑rr′=r−ro
eei(r′, r) = 1,
∑rr′=r−ro
ooi(r′, r) = 1, and
∑rr′=r−ro
uui(r′, r) = 1

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.4. Asynchronous distributed optimal supply and demand control 111
weight the received distribution charge, the obtained shadow price, and the receivedconnected prosumers’ imbalance information at time r′ ∈ [r − r0, r], respectively.
Let Ri ∈ {1, 2, . . .} be the time at which prosumer i performs its optimization.Define Rm ∈ {1, 2, . . .} be the time at which grid operator m updates its distri-bution charge. We provide the algorithms for solving Problem 6.5 locally andasynchronously in Algorithm 5. The illustration of the algorithm is shown in Fig.6.2.
���� �� ��������� �������
������� �����������������
� �������
� ��������
��������������������� ��������
������ ���������
Figure 6.2: Interaction between prosumer 1 and prosumer 2 and between prosumer1 and the gas grid operator, with asynchronous updates. The distribution charge λg(r)
is an element of λa(r), whereas the gas supply bid being injected to the gas grid gi(r) is anelement of si(r).
We consider the following assumptions on the profit functions Vi(si).
Assumption 6.8. On intervals si ∈ Si, profit functions Vi(si) are increasing, strictlyconcave, and twice continuously differentiable.
Assumption 6.9. The curvatures of Vi(si) are bounded away from zero for allsi ∈ Si: −V ”
i (si) � Ti > 0 with Ti is a 12×12 diagonal matrix in which the diagonalentries are 1/α for all α = αppm , αhaux , αf , αg, αe, αhd
, αq, αzg , αzh , αTin , αx, αv >
0, and in which the entries outside the main diagonal are all zero values.
The time between the successive updates are assumed to obey the followingcondition.
Assumption 6.10. For the energy grid operators g, f, e and prosumer i = 1, . . . , n,the difference between successive elements of Rg, Rf , Rj , and Ri is bounded byro.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
112 6. Asynchronous distributed control of the energy supply-demand balance
Algorithm 5: Asynchronous input and state exchange information
Result: Find yi at each time k of the distributed MPC scheme.for k = 1, . . . ,K do
Agent i measures zi(k), wi(k);Grid operator m measures its grid capacity M ;while |λτ
i (r)− λτi (r − 1)| > ξ, |λτ
m(r)− λτm(r − 1)| > ξ and∑n
i=1 ηm,imτi (r) � M for all m = g, f, e and i = 1, . . . , n do
for i = 1, . . . , n such that r ∈ Ri doFor all τ = k, . . . , k + T , agent i:
• Estimates λτa(r) = [λτ
g(r), λτf (r), λ
τe (r)]
T
based on (6.31) and the estimate λτj (r) based on (6.32).
• Solves problem (6.27).
• Communicates xτi (r) to the connected prosumers.
• Coordinates mτi (r) to corresponding energy grid operator m
for all m = f, g, e.
• Estimates xτj (r) according to (6.33).
• Updates the shadow price λτi (r) based on (6.29).
• Shares λτi (r) to the connected prosumers.
endfor i = 1, . . . , n such that r /∈ Ri do
si(r) = si(r − 1) and λi(r) = λi(r − 1).endfor m = 1, . . . , q such that r ∈ Rm do
For all τ = k, . . . , k + T , grid operator m:
• Estimates the aggregated supply bids∑n
i=1 ηm,imτi (r)
based on (6.30).
• Updates the distribution charge λτm(r)
based on (6.28).
• Shares λτm(r) to the connected prosumers.
endfor m = 1, . . . , q such that r /∈ Rm do
λτm(r) = λτ
m(r − 1)end
endImplement yi which includes gi, fi, ei only for τ = k.
end

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.5. Simulation results 113
For each time τ , define the error in distribution charge estimation as Δλa(r) =
[Δλf (r),Δλg(r),Δλe(r)]T where Δλi
m(r) = |λim(r) − λi
m(r)| for all m = f, g, e,the deviation in estimations of the decision variables Δfi(r),Δgi(r),Δei(r),Δvi(r),the deviation in distribution charge estimation as Δλm(r) = |λi
m(r)− λim(r)| for all
m = f, g, e, the deviation in shadow price estimation as Δλj(r) = |λj(r)− λj(r)|and the error in gradient estimation as Δl(r) = [Δlf (r),Δlg(r),Δle(r)]
T whereΔlm(r) = |lm(r)− ∂D
∂λmλ(r)| for all m = f, g, e.
We summarize the main results on the convergence of the asynchronous dis-tributed supply and demand control in the following theorem.
Theorem 6.11. Given knowledge of the dynamic stored energy in the storage devicezi(r), initial distribution charge λm(1) � 0, and suppose that assumptions 6.8, 6.9,and 6.10 hold, then the error in the distribution charge estimation Δλa(r), thedeviation in shadow price estimation Δλj(r), the deviation in estimations of thedecision variables Δsi(r) and the error in the gradient estimation Δl(r) converge tozero as r → ∞ for all i ∈ {1, 2, . . . , n} and all m = f, g, e.
Proof. We follow similar steps as in Theorem 1 in [16], where only some control-lable inputs are asynchronously exchanged. Firstly, we formulate our problem in astatic optimization form, as in 6.21, so that the framework of [16] is similar. Thenwe add asynchronous state coordination. To use the same steps as in proofingTheorem 1 in [16], we have the assumptions (6.8) and (6.9) stating that the profitfunctions Vi(si) have quadratic functions of all states and controllable inputs, whichare denoted by si. Therefore, we add an additional term in the objective functionof problem (6.21), as stated in Remark 6.4 in Subsection 6.3.2. The rest of theproof then follows similar to [16].
6.5 Simulation results
In this section, we conduct simulations to: a) assess the impact of different infor-mation topologies of the community shown in the matrix A at (6.15), b) studythe impact of owning flexible heat demand, c) interpret shadow prices, and d)illustrate the convergence of the proposed asynchronous coordination shown inSection 6.4. All dynamics and technical constraints of the prosumers in Subsection6.2.1 and the constraints on the external energy grids in Subsection 6.2.2 are takeninto account when solving the distributed optimization problem synchronouslyand asynchronously, as stated in Subsections 6.3 and 6.4, respectively. We usethe QP-solver from Gurobi 6.0.5. with YALMIP R20150626 embedded in MATLAB2015a to find the optimal solutions.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
114 6. Asynchronous distributed control of the energy supply-demand balance
6.5.1 Simulation setup
We consider a micro grid consisting of 2 prosumers and 2 consumers. The prosumersare equipped with an anaerobic digester to produce biogas, a fuel cell and adecentralized gas storage device. Their biogas production level is set at 25 Nm3/15min, which is equivalent to 150 kWh/15 min per time step k. We initially set theavailable biogas at the prosumers’ gas storage devices at zero, i.e. zg,i(1) = 0.Both prosumers and the consumers have μ-CHP devices, heat buffers and smartair conditioners which have a comfortable range for the inside temperature. Weuse the characteristics of μ-CHP devices and heat buffers as presented in [70]. Wechoose the same fuel cell, i.e. Proton Exchange Membrane (PEM) fuel cell, as whatwe have for the prime mover of μ-CHP devices. The above-ground low-pressurevessels with a capacity of 2000 m3 (equivalent to 12000 kWh [8]) is chosen for thedecentralized gas storage devices [26].
The outside temperature tout,i(k) and the target of the inside temperature ta,i(k)
for all prosumers and consumers are identical and provided in Fig. 6.3. The powerconsumption patterns of the prosumers and consumers are shown in Fig. 6.4. Thepatterns in the figure represent the data for 21 November 2012. The time horizonof that day is divided into 15-minute samples, resulting in 96 samples. We assumethat the prosumers and consumers have capability to well predict their own localenergy demands for the next hour, i.e. T = 4. We therefore provide 100 samples ofthe power demand profiles (in Fig. 6.4), the outside temperature and the target ofinside temperature (in Fig. 6.3).
The selling prices of the LP gas grid and the gas filling station are gatheredfrom [9], whereas the selling prices of the LV power grid are obtained from [7].We assume that the capacity of the gas grid and power grid are equal to theaggregated demand of 600 gas consumers and 100 power consumers, respectively.The average consumption patterns of a gas consumer and power consumer areshown in [15] and in the red line depicted in Fig. 6.4, respectively. We assumethat the lorry capacity picking up the green gas from the micro grid to bring itto the gas filling station is sufficiently high. Table 6.1 presents the values of theparameters involved in the objective function of Problem 6.3, which is stated inSection 6.3. The upgrading efficiency is set at 100%, whereas the efficiency ofthe fuel cell is set at 30%. We set the non-summable diminishing step sizes atγi(r) = γg(r) = γf (r) = γe(r) =
0.4√r. To terminate the internal iteration r, we use
the small bounds ξi = ξg = ξf = ξe = 0.001.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.5. Simulation results 115
0 15 30 45 60 75 90
4
8
16
20
24
Tem
pera
ture
(C
elc
ius)
Time step (k)
Target temp.
Outside temp.
Figure 6.3: Outside temperature profile for the whole day of 21 November 2012 in theNetherlands [5] and the target of inside temperature of all prosumers and consumers.
0 15 30 45 60 75 900.00
0.15
0.30
0.45
0.60
0.75
Pow
er
dem
and (
kW
h/1
5 m
in)
Time step (k)
Prosumer 1
Consumer 1
Prosumer 2
Consumer 2
Figure 6.4: Power consumption patterns of 4 prosumers.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
116 6. Asynchronous distributed control of the energy supply-demand balance
Table 6.1: The parameter values in the objective function of Problem 6.3 stated in Section6.3
Parameter Value Parameter Value
cx,i 1 czh,i 1e-3ctf,i, ctg,i, cte 1e-6 ta,i 1e-6
czg,i 1e-6 caux 1e-6ctp,i 10000 chd,i, cq,i 1e-6
6.5.2 The impact of different information topology of the com-munity shown in the matrix A
In order to assess the impact of different information topologies of the communityshown in the matrix A at (6.15), we use the following three information matricesA given by
A1 =
⎡⎢⎢⎣
0.2 0.4 0 0.4
0.4 0.2 0.4 0
0 0.4 0.2 0.4
0.4 0 0.4 0.2
⎤⎥⎥⎦ , A2 =
⎡⎢⎢⎣
0.6 0.2 0 0.2
0.2 0.6 0.2 0
0 0.2 0.6 0.2
0.2 0 0.2 0.6
⎤⎥⎥⎦ ,
and A3 whose entries are all set at 0.25. Utilizing matrix A1, the prosumers weightheir own imbalance information with 0.2 and their neighboring prosumers’ imbal-ance information with 0.4. Hence, using matrix A1 (A2), the prosumers weigh theirimbalance information more (less) important than their neighboring prosumers,respectively. In contrast, the prosumers weigh their imbalance information equallyto their neighboring prosumers when using matrix A3.
The total biogas imbalance patterns with those three information topologies areshown in Fig. 6.5. As can be seen in the figure, they have similar pattern. However,information topology A1 results in better balancing between biogas supply anddemand in the micro grid than the other information topologies. It is due to thefact that using information topology A1 the prosumers weight their neighboringprosumers’ imbalance more important than their own imbalance. In this way, theprosumers take better care on what is happening in the micro grid than when theyuse information topologies A2 and A3.
The negative imbalance levels shown in Fig. 6.5 depict the moments whenthe consumers discharge some amount of biogas from the pipeline of the microgrid thereby decreasing the pressure of the micro grid. In contrast, the positiveimbalance levels represent the moments when the prosumers charge some amountof biogas to the pipeline of the micro grid as they have capabilities to predictthe load profiles in the micro grid using the imbalance information formulated in

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.5. Simulation results 117
0 15 30 45 60 75 90
-0.2
-0.1
0.0
0.1
0.2
Bio
gas im
bala
nce (
Nm
3/1
5 m
in)
Time step (k)
A2
A3
A1
Figure 6.5: Total biogas imbalance in the micro grid with different A1, A2, and A3 matrices
Subsection 6.2.2.We then use information topology A1 for different weighting factors on the im-
ported power, i.e. ctp,i = 10, 100, 10.000. The corresponding total biogas imbalancepatterns are shown in Fig. 6.6. With ctp,i = 10.000, where it is immensely expen-sive to import the power, the prosumers contribute more to help the consumersin the micro grid to minimize the biogas imbalance within the micro grid. It canbe verified by looking at the total amount of imported power from the externalpower grid to satisfy the power demand in the micro grid, as depicted in Fig. 6.7.The total imported power level with ctp,i = 10.000 is always the lowest level, i.e.pimp(k) ≈ 0, in comparison to other values of ctp,i. It means that the consumersget biogas from their neighboring prosumers to fulfill their local demand.
6.5.3 Flexible and fixed heat demand
Our heat demand cannot be shifted in time when we have the constraints givenby Tin,i(k) = Ta,i(k) at each time k. Instead, the prosumers and consumers in ourstudy aim at participating in demand response by controlling the inside temperatureof their room within a certain temperature range. They have targets of the insidetemperature, which are set in the middle of the lower and upper bounds presentedrespectively in the dashed and solid black lines in Fig. 6.8. The outside temperaturepattern can be seen in Fig. 6.3. The prosumers and consumers allow their insidetemperature to deviate from the target with some boundaries, depending on theavailable heat in their systems. As mentioned earlier, the lower and upper bounds

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
118 6. Asynchronous distributed control of the energy supply-demand balance
0 15 30 45 60 75 90-0.16
-0.08
0.00
0.08
0.16
Bio
gas im
bala
nce (
Nm
3/1
5 m
in)
Time step (k)
10
100
10000
Figure 6.6: Total biogas imbalance with different weighting factors on the imported power(ctp,i).
0 15 30 45 60 75 90
0.0
0.1
0.2
0.3
Import
ed p
ow
er
(kW
h/1
5 m
in)
Time step (k)
10
100
10000
Figure 6.7: Total imported power from the external power grid to satisfy local powerdemand in the micro grid, with different weighting factors on the imported power (ctp,i).
of the inside temperature are depicted by the dashed and solid black lines in Fig.6.8.
We here conduct 5 scenarios with diverse weighting factors on the available

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.5. Simulation results 119
heat stored in the water tank, denoted by czh,i, and with different weighting factorson the deviation from the targets, specified by ta,i, as is presented in Table 6.2. Weset the rest of the parameters involved in the objective function of Problem 6.3 as inTable 6.1. The total available heat for all prosumers and consumers for the wholeday on 21 November 2012, i.e.
∑96k=1
∑4i=1(zh,i(k)− 8.1) and the total deviation
of inside temperature from the targets, i.e.∑96
k=1
∑4i=1 |Tin,i(k)− Ta(k)|, can be
found in Table 6.3. The value 8.1 is the minimum heat available in the water tank,calculated using (6.10), where m = 200kg and cp = 4.05kJ/(kg.K).
From cases 1, 4, and 5 in Table 6.3, we see that the higher weighting factorof ta,i, the lower total of deviation between the inside temperature and its target.Moreover, we can conclude from cases 1, 2, and 3 in the table that the higherweighting factor of czh,i, the lower total of heat available in the water tank. Thesetwo facts are also shown in Fig. 6.8 and Fig. 6.9, respectively. From Fig. 6.9, theavailable heat in the water tank during k = 0, . . . , 43 is close to zero, as the powerdemand is low at the moments. Hence, the heat output from the prime mover isdirectly used to satisfy the lower bound of the inside room temperature, as shownin Fig. 6.8.
Table 6.2: Five cases with diverse values of czh,i and ta,i
Case czh,i ta,i
1 1e-3 1e-32 5e-3 1e-33 1e-2 1e-34 1e-3 5e-35 1e-3 1e-1
Table 6.3: Results of five cases stated in Table 6.2
Case∑96
k=1
∑4i=1(zh,i(k)− 8.1)
∑96k=1
∑4i=1 |Tin,i(k)− Ta(k)|
1 198.0 197.42 165.6 214.83 163.0 210.44 235.1 109.95 256.1 70.6
6.5.4 Interpretation of shadow price
Here we examine the interpretation of shadow prices, whereas the interpretation ofdistribution charges has been discussed in Remark 6.6. We show the shadow price

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
120 6. Asynchronous distributed control of the energy supply-demand balance
0 15 30 45 60 75 90
15
18
21
24
Insid
e tem
pera
ture
(C
elc
ius)
Time step (k)
Case 1
Case 5
Lower bound
Upper bound
Figure 6.8: The inside temperature of consumer 1 for cases 1 and 5
0 15 30 45 60 75 90
8.4
9.1
9.8
10.5
Heat in
the w
ate
r ta
nk (
kW
h/1
5 m
in)
Time step (k)
Case 3
Case 1
Figure 6.9: Available heat in the heat tank of consumer 1 for cases 1 and 3
λr1(1) of consumer 1 at time step k = 1 and its deviation between the expected and
real influence from its neighboring prosumers, i.e. Δrv1(1) = vr1(1)−
∑j =1 A1jx
rj(1)
for all j = 2, 3, 4 in Fig. 6.10. The shadow price is initially set at 1, i.e. λr=0(1) = 1.As seen in the figure, when Δr
v1(1) < 0 the consumer decreases its shadow price.Otherwise, it increases its shadow price up till Δr
v2(1) = 0. This phenomenon also

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.5. Simulation results 121
holds for the shadow price of prosumers.
0 3 6 9 12 15
-0.4
0.0
0.4
0.8
1.2
λ 2 and Δ
2
Internal iteration (r)
Difference between the expected & real influence from neighboring agents
Shadow price
Figure 6.10: The shadow price λr1(1) of consumer 1 and its deviation between the expected
and real influence from its neighboring prosumers, i.e. Δrv1(1) = vr1(1) −
∑j �=1 A2jx
rj (1)
for all j = 2, 3, 4
Moreover, we simulate another case where the shadow price is initially set atzero. The evolution of the shadow price in comparison to the evolution of theshadow price when using the initial value of one is shown in Fig. 6.11. It shows usthat with different initializations of the shadow prices, we converge to the sameoptimal values of shadow price, but with different number of iterations.
6.5.5 Convergence of synchronous and asynchronous coordina-tion
Here we illustrate the convergence of the synchronous and asynchronous coordina-tion. To do so, we use the following simple setup to implement the asynchronouscoordination proposed in Subsection 6.4. The micro grid is divided into two groups,namely a group with consumers and a group with prosumers. The consumersperform their optimization when the iteration number r is uneven. The biogasprosumers perform their optimization when the iteration number r is even. Oncethe termination criteria stated in Algorithm 5 hold, they implement the first inputsequence.
The evolution of shadow prices when implementing synchronous and asyn-chronous exchange information can be found in Fig. 6.12. As expected, it requires

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
122 6. Asynchronous distributed control of the energy supply-demand balance
0 15 30 45 60
0.0
0.3
0.6
0.9
1.2
λ 2
Internal iteration (r)
λ2(r=0)=0
λ2(r=0)=1
Figure 6.11: Shadow price evolution of consumer 1 when its initial shadow price is set at 1and 0
more number of internal iterations to converge to the optimal shadow prices whenimplementing the asynchronous updates than when implementing the synchronousupdates. They however converge to the same optimal solution.
0 20 40 60 800.0
0.3
0.6
0.9
1.2
Synchronous state update
Asynchronous state update
λ 2
Internal iteration (r)
Figure 6.12: The convergence of synchronous and asynchronous coordination

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
6.6. Discussion 123
6.6 Discussion
We have proposed a utility-based asynchronous state and input coordination algo-rithm for dynamic prosumers embedded in multiple energy grids. The coordinationexamines bidirectional communication between a prosumer and connected energygrid operators and between a prosumer and its neighboring prosumers. We haveproved theoretically and illustrate the convergence of the algorithm. We haveshown that the distribution charges help the energy grid operators to optimallydecide the maximum allowable energy injected by each prosumer connected, henceavoiding overloading energy grids. The distribution charges modified by the energygrid operators are uniform for all connected prosumers. We also have shown thatthe shadow prices help the prosumers to reach a consensus, i.e. through informa-tion topology shown in the matrix A, with their neighboring prosumers on howmuch they influence each other. The shadow prices are unique for each prosumer.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 7Conclusion and outlook

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Chapter 7
Conclusion and outlook
We have studied how to embed dynamic agents that transform gas to power, orpower to gas in the different energy grids, including: the gas grid, the mobilityindustrial grid, and the power grid, in a distributed and optimal manner. In thischapter, we discuss the main conclusions and findings presented in Chapters 3-6.We also provide suggestions for future research in this chapter.
7.1 Conclusion
This research is motivated and supported by a smart gas grid project (C9) of theEnergy Delta Gas Research (EDGaR) consortium in the Netherlands. The projectdeals with investigating the capacity of smart grid technologies to facilitate theintroduction of new gases into the distribution grids.
In particular, this research focuses on demand control of active energy con-sumers, supply control of renewable energy sources, and storage managementsystem for the consumers and producers embedded in the multiple energy grids. Inthe following, we summarize the conclusions of each chapter.
In Chapter 3, we have considered supply coordination between energy gridoperators and energy producers equipped with decentralized energy storage devicesand energy converters. Specifically, the energy producers make decisions on theirsupply bids based on local information, yet still coordinate their bids to the gridoperators in order to avoid overloading the grids, with the help of distributioncharges. The setting results in a two-layer optimization problem experiencedby energy producers and grid operators. Bidirectional communication betweenenergy producers and grid operators is therefore examined in the chapter. Wehave formulated the associated optimal control problem in an MPC framework toanticipate the future conditions on the energy grids and changes on the supplyprofiles. We propose synchronous distributed algorithms, assuming that all energyproducers and grid operators have a common clock to update their supply bidsand distribution charges, respectively. It is confirmed from our numerical testingsthat a good initialization of distribution charges can reduce the number of iterationneeded to converge to the optimal supply bids and distribution charges.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
126 7. Conclusion and outlook
In Chapter 4, we have extended the approach given in Chapter 3 by imple-menting asynchronous exchange information on the proposed supply coordinationalgorithms. We prove the convergence of the asynchronous supply coordinationalgorithms in two cases. First, under some assumptions we prove the convergenceof the asynchronous supply coordination algorithms in the static case, assumingthat there are always sufficient sources to supply the amount of energy to the corre-sponding energy grids. Next, we prove the convergence of the asynchronous supplycoordination algorithms by considering the dynamics of the energy producers fromenergy storage devices, when iteratively calculating the optimal supply bids anddistribution charges. The proof is done under some additional assumption andan additional assumption on the time at which the algorithms reach the optimalsolutions. The distributed asynchronous supply coordination is implemented andevaluated for a setup consisting of energy producers modeled in Chapter 3. It isnumerically confirmed that the distribution charges increase from the initial valuesif the aggregated supply bids from the energy producers exceed the grid capacities.Otherwise, the distribution charges decrease with zero as a lower bound.
In Chapter 5, we have implemented the algorithms presented in Chapter 4 forbiogas consumption and multi-energy supply coordination of prosumers. Theybuild a central anaerobic digester for producing biogas from their organic waste.They are embedded in the low-pressure gas grid and in the low-voltage power grid.Here we proposed bidirectional communication between the prosumers and thedigester operator and between the prosumers and the energy grid operators in orderto obey the grid capacity constraints. It requires more iterations to converge tothe optimal solutions when implementing the asynchronous exchange informationthan when implementing the synchronous exchange information.
In Chapter 6, we have not only coordinated the supply bids of prosumers to theassociated energy grid operators asynchronously (as in Chapter 4), but also partlycoordinated the states of the prosumers, i.e. imbalance between their local supplyand demand, to their neighboring prosumers in a community asynchronously.Hence, the prosumers can contribute to minimize the community imbalance, whilemaximizing their profit by selling their surplus energy to the energy grids. Weuse a dynamic pricing mechanism, the so-called shadow price, for coordinatingthe imbalance in the community. The shadow prices help the prosumers to reacha consensus, i.e. through information topology presented in the A matrix, onhow much they influence (help) each other. The number of iterations needed toconverge to the optimal solutions depend on the initialization of shadow prices. Inthis chapter, we also considered the case when the prosumers have some flexibleheat demand thereby allowing them to participate more actively in maintainingthe balance in the community. To use similar steps as in Chapter 4 to provethe convergence of the corresponding asynchronous input and state coordinationalgorithms, it requires an additional assumption on the optimization problem, i.e.,

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
7.2. Outlook 127
that all controllable inputs and states have quadratic functions in the optimizationproblem. It is numerically confirmed that with different initializations of theshadow prices, we converge to the same optimal values of shadow prices, but withdifferent number of iterations. The shadow prices decrease from the initial valuesif the deviations between the expected and real influence from the neighboringprosumers are less than zero. Otherwise, they decrease till the deviations becomezero.
7.2 Outlook
In this thesis, we have presented two-layer optimization problems. The low levelconsists of the individual optimization problem solved to maximize prosumers’profit, minimize all associated costs, minimize the imbalance within a community,and/or maintain the heat comfort levels of prosumers. The high level is due to therequisite in updating the distribution charges to ensure that the grid constraintsare met. The integration of new stakeholders, including: aggregators of renewableenergy producers and consumers and balancing responsible parties, into the setupconsidered in Chapter 3 may result in multi-hierarchical optimization problems.Examination of the integration is currently being studied under the Universal SmartEnergy Framework (USEF). See [40] for detailed description about USEF.
Due to condition C1 in Chapter 4, the profit functions must be strictly concave,continuous, and twice differentiable. On the practical side, the revenue functionsmay not satisfy the condition, or may simply be a linear function. Hence, consider-ing the convergence of the asynchronous supply coordination with this practicalconsideration is a topic that deserves future investigation.
In fact, heat can be effectively stored for a long period. However, as the heatbuffer has a maximum capacity, some surplus heat is wasted under the settingwe propose in Chapter 5. It is therefore of interest for future work to embed theprosumers in some heating network in order to use the waste heat of the μ-CHPs.
An experimental implementation of the proposed asynchronous distributedcoordination algorithm may bring new insights which deserve some attention andfurther investigation. Additionally, inclusion of practical control considerationsdue to on-off constraints of the energy converters is among future extensions forChapter 6. This results in considering non-convex constraints when iteratively andasynchronously solving the prosumers’ optimal control problem.
Another future avenue for Chapter 6 is to extend the problem by incorporat-ing flexible power demand due to, e.g., the use of plug-in electric vehicles. Bycoordinating the switch-on time of the plug-in electric vehicles, the prosumers canparticipate in demand response more actively.
Regarding the four restrictions R1 −R4 in Subsection 6.2.1, we still have some

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
128 7. Conclusion and outlook
freedom in designing the static information topology shown in A matrix. As seenin the simulation results in Subsection 6.5.2, different A matrices result in diversetotal community imbalance levels. It is therefore of interest as well to investigatean approach to find the optimal information topology.
As stated earlier, good initialization of distribution charges and shadow pricesreduces the number of iterations needed to converge to the optimal solutions.Hence, future research may include a method to optimize the initial values ofdistribution charges and shadow prices hence reducing the number of iterationsduring the bidding process between the prosumers and the energy grid operatorsand between the prosumers and their neighboring prosumers in the community,respectively.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Appendix

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Appendix A
Proofs of Lemmas 4.16 - 4.22
This appendix shows the proofs of Lemmas 4.16 - 4.22 presented in Chapter 4. Theproofs use similar steps to prove Lemma 4-6 in [76].
A.1 Proof of Lemma 4.16
For r ∈ R1, . . . , Rq, applying the projection theorem {[30], Prop. 2.1.3} to
λm(r + 1) = [λm(r)− γlm(r)]+
for all m = 1, . . . , q. We then have
(λm(r)− γlm(r)− λm(r + 1)) (λm(r)− λm(r + 1)) � 0.
Hence, lm(r)πm(r) � − 1γπm(r)2 for all m = 1, . . . , q, yielding the desired result.
A.2 Proof of Lemma 4.17
According to Lemma 4.10, the Hessian of the dual objective function D(λ) issymmetric and positive semidefinite. Hence, from Appendix A in [30] we have
qT∇2D(λ)q � ρ(∇2D(λ))||q||2
where ρ(∇2D(λ)) is the largest eigenvalue of the matrix ∇2D(λ), which is boundedfor all λ. From Lemma 4.10 and (4.13), we obtain

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
130 A. Proofs of Lemmas 4.16 - 4.22
ρ(∇2D(λ)) � trace(B(λ))
=
n∑i=1
q∑m=1
βm,i(λ)
�n∑
i=1
q∑m=1
αm,i
From assumption 4.4, we have αm,i > 0 for all i. When there exists a constant0 < αm,i � A1, we have
ρ(∇2D(λ)) < 4nA1,
generating the desired result.
A.3 Proof of Lemma 4.18
From (4.13)-(4.19) and the chain rule theorem, we obtain
0 � ∂ui
∂εm,r(ε; λ)
� ∂U′−1i (εT λ)
∂εm,r(ε; λ)=
∂U′−1i (
∑r εm,rλm,r)
∂εm,r(ε; λ)
=∂U
′−1i (
∑r εm,rλm,r)
∂∑
r εm,rλm,r)
∂∑
r εm,rλm,r
∂εm,r(ε; λ)
= U′′−1i (
∑r
εm,rλm,r) ·∑r
λm,r
� − 1
αm,i·∑r
λm,r
� αm,i · λm,r
where λm,r is an upper bound of∑
r λm,r, for all m = 1, . . . , q.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
A.4. Proof of Lemma 4.19 131
A.4 Proof of Lemma 4.19
By using the mean value theorem, Lemma 4.18, and (4.20)-(4.23), for some εm wehave
|U ′−1i (λi
m(r))− U′−1i (λi
m(r))| = |ui(εmr′(r); λm(r))− ui(1mr′(r); λm(r))|ΔU
′−1i (λm(r)) = |
∑r′
∂ui
∂εmr′(εm; λm(r))(1mr′(r)− εmr′(r))|
� αmi|∑r′
λmr′(r)(1mr′(r)− εmr′(r))|
� αmi|λm(r)−r∑
r′=r−ro
bmi(r′, r)λm(r′)|
� αmi maxr−ro�r′�r
|λm(r)− λm(r′)|
� αmi maxr−ro�r′�r
r−1∑τ=r′
|πm(τ)|
� αmi
r−1∑r′=r−ro
|πm(r′)|
� αmi
r−1∑r′=r−ro
πabs,m(r′)
for all m = 1, . . . , q, resulting in the desired result.
A.5 Proof of Lemma 4.20
Using (4.21)-(4.22), Lemma 4.18, and the mean value theorem, we have

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
132 A. Proofs of Lemmas 4.16 - 4.22
|U ′−1i (λi
m(r))− U′−1i (λi
m(τ)| = |ui(1mr′(r); λm(r))− ui(1mr′(τ); λm(τ))|ΛU
′−1i (λm(r)) � |ui(1mr′(r); λm(r))− ui(1mr′(τ); λm(r))|
� | ∂ui
∂1m(1m; λm(r))(1mr′(r)− 1mr′(τ))|
� |∑r′
∂ui
∂1mr
(1m; λm(r))(1mr′(r)− 1mr′(τ))|
� αmi|∑r′
λmr′(r)(1mr′(r)− 1mr′(τ))|
� αmi|λm(r)− λm(τ)|
� αmi
t−1∑r′=τ
|πm(r′)|
� αmi
t−1∑r′=τ
πabs,m(r′)
for all m = 1, . . . , q.
A.6 Proof of Lemma 4.21
From (4.6),
∂D
∂λm= cm −
n∑i=1
xm,i, (A.1)
for all m = 1, . . . , q. The energy grids are determined as overloading or underload-ing grids by the estimates lm(r) given by
lm(r) = cm −n∑
i=1
r∑r′=r−ro
ami(r′, r)xm,i(r
′), (A.2)
with∑r
r′=r−roami(r
′, r) = 1, for all m = 1, . . . , q. Define now xm,i(r) = xm,i(λm(r))
as the supply level xm,i(r) of agent i at time r, given the exact distribution chargeλm(r) at the same time r. We then have
| ∂D
λm(r)− lm(r)| =
n∑i=1
|r∑
r′=r−ro
ami(r′, r)xm,i(r
′)− xm,i(r)|.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
A.7. Proof of Lemma 4.22 133
For a constant natural number A2 > 0, we obtain
| ∂D
λm(r)− lm(r)| � A2
n∑i=1
|r∑
r′=r−ro
ami(r′, r)xm,i(r
′)− xm,i(r)|
Δlm(r) � A2
n∑i=1
maxr−ro�r′�r
|xm,i(r′)− xm,i(r)|
� A2
n∑i=1
maxr−ro�r′�r
|U ′−1i (λi
m(r′))− U′−1i (λi
m(r))|
(A.3)
Using Lemmas 4.19-4.20, we have
Δlm(r) � A2
n∑i=1
maxr−ro�r′�r
|U ′−1i (λi
m(r))− U′−1i (λi
m(r′))|
+ |U ′−1i (λi
m(r′))− U′−1i (λi
m(r′))|
� A2
n∑i=1
maxr−ro�r′�r
αmi
⎛⎝ r−1∑
τ=r′|πm(τ)|+
r′−1∑τ=r′−ro
|πm(τ)|⎞⎠
= A2
n∑i=1
αmi maxr−ro�r′�r
r−1∑τ=r′−ro
|πm(τ)| (A.4)
As stated earlier, we define r′ = r − ro. Hence,
Δlm(r) � A2
n∑i=1
αmi
r−1∑τ=r−2ro
|πm(τ)|
� nA2αmi
r−1∑τ=r−2ro
|πm(τ)|
� nA2αmi
r−1∑τ=r−2ro
πabs,m(τ)
where αmi is the upper bound of αmi.
A.7 Proof of Lemma 4.22
Applying Lemmas 4.16-4.17 to the second order Taylor expansion of D(λ(r + 1)),we obtain

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
134 A. Proofs of Lemmas 4.16 - 4.22
D(λm(r + 1)) = D(λm(r)) +∂D(λm)
∂λm(λm(r + 1)− λm(r))
+1
2
∂2D(λm)
∂λ2m
(λm(r + 1)− λm(r))2
= D(λm(r)) +∂D(λm)
∂λmπm(r) +
1
2
∂2D(λm)
∂λ2m
π2m(r)
� D(λm(r)) +∂D(λm)
∂λmπm(r)− lm(r)πm(r) + lm(r)πm(r)
+ 2nA1|πm(r)|2
� D(λm(r)) + |∂D(λm)
∂λm− lm| · |πm(r)| − 1
γ|πm(r)|2
+ 2nA1|πm(r)|2
By Lemma 4.21,
D(λm(r + 1)) � D(λm(r)) + nA2αmi
r−1∑r′=r−2ro
|πm(r′)|2 − (1
γ− 2nA1)|πm(r)|2
� D(λm(0)) + nA2αmi
r∑τ=0
|πm(τ)|2 − (1
γ− 2nA1)
r∑τ=0
|πm(τ)|2
� D(λm(0))− (1
γ− 2nA1 − nA2αmi)
r∑τ=0
|πm(τ)|2,
for all m = 1, . . . , q and γ > 0.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Bibliography
[1] www.epa.gov.
[2] http://www.geoexpro.com/articles/2009/04/the-groningen-gas-field. .
[3] www.gasunie.nl/en/corporate-responsibility/sustainability/green-gas. .
[4] http://energieinfo.tennet.org/dataexport/exporteerdata.aspx?id=load/nextday.
[5] http://projects.knmi.nl/klimatologie/uurgegevens/selectie.cgi.
[6] http://www.liander.nl.
[7] www.apxendex.com.
[8] www.afbini.gov.uk/afbi-ad-18-months-v05.pdf.
[9] www.iceendex.com.
[10] www.ika.rwth-aachen.de on European hydrogen infrastructure and production.
[11] J.A. Aguado and V.H. Quintana. Inter-utilities power-exchange coordination:a market-oriented approach. Power Systems, IEEE Transactions on, 16(3):513–519, Aug 2001.
[12] D. Alkano and J.M.A. Scherpen. Distributed supply coordination for power-to-gas facilities embedded in energy grids. 2016. doi: 10.1109/TSG.2016.2574568.
[13] D. Alkano and J.M.A. Scherpen. Distributed supply and consumption coordi-nation of biogas prosumers. Submitted.
[14] D. Alkano, J.M.A. Scherpen, and M. Cao. Distributed asynchronous supplycoordination of dynamic agents embedded in multiple grids. Submitted.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
136 BIBLIOGRAPHY
[15] D. Alkano, W.J. Nefkens, J.M.A. Scherpen, and M. Volkerts. Optimal controlin a micro gas grid of prosumers using model predictive control. In 21thInternational Symposium on Mathematical Theory of Networks and Systems,pages 592–598, July 2014.
[16] D. Alkano, J.M.A. Scherpen, and M. Cao. Distributed asynchronous supplycoordination in energy grids. In Decision and Control, 2015. Proceedings.IEEE Conference on, pages 5239–5244, Dec 2015.
[17] D. Alkano, J.M.A. Scherpen, and Y. Chorfi. Asynchronous distributed controlof the energy supply-demand balance. Submitted.
[18] I. Alkano, D.and Kuiper and J.M.A. Scherpen. Distributed mpc for power-to-gas facilities embedded in the energy grids. In European Control Conference,2015. Proceedings. IEEE, pages 1468–1473, July 2015.
[19] S. Amiri, D. Henning, and B.G. Karlsson. Simulation and introduction of a{CHP} plant in a swedish biogas system. Renewable Energy, 49:242 – 249,2013.
[20] O. Ardakanian, C. Rosenberg, and S. Keshav. Realtime distributed congestioncontrol for electrical vehicle charging. SIGMETRICS Perform. Eval. Rev., 40(3):38–42, January 2012.
[21] O. Ardakanian, S. Keshav, and C. Rosenberg. Real-time distributed controlfor smart electric vehicle chargers: From a static to a dynamic study. IEEETransactions on Smart Grid, 5(5):2295–2305, Sept 2014.
[22] M. Arnold, R. R. Negenborn, G. Andersson, and B. Schutter. IntelligentInfrastructures, chapter Distributed Predictive Control for Energy Hub Coor-dination in Coupled Electricity and Gas Networks, pages 235–273. SpringerNetherlands, Dordrecht, 2010.
[23] A. Arteconi, N.J. Hewitt, and F. Polonara. State of the art of thermalstorage for demand-side management. Applied Energy, 93:371 – 389, 2012.(1) Green Energy; (2)Special Section from papers presented at the 2ndInternational Enery 2030 Conf.
[24] S. Athuraliya and S.H. Low. Optimization flow control, ii: Implementation,2000.
[25] K. Baker, J. Guo, G. Hug, and X. Li. Distributed mpc for efficient coordinationof storage and renewable energy sources across control areas. Smart Grid,IEEE Transactions on, PP(99):1–10, 2016.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
BIBLIOGRAPHY 137
[26] J. Barnthaler, H. Bergmann, H. Hornbachner, and D. Konrad. Gasversorgungmittels lokaler Biogas-Mikronetze, report Bundesministerium fur Verkehr, Inno-vation und Technologie. 2009.
[27] M. Beaudin, H. Zareipour, A. Schellenberglabe, and W. Rosehart. Energystorage for mitigating the variability of renewable electricity sources: Anupdated review. Energy for Sustainable Development, 14(4):302 – 314, 2010.
[28] J. Bekkering, E.J. Hengeveld, W.J.T. van Gemert, and A.A. Broekhuis. Willimplementation of green gas into the gas supply be feasible in the future?Applied Energy, 140:409 – 417, 2015.
[29] P. Berling. Holding cost determination: An activity-based cost approach.International Journal of Production Economics, 112(2):829 – 840, 2008.Special Section on RFID: Technology, Applications, and Impact on BusinessOperations.
[30] D.P. Bertsekas. Nonlinear programming. Athena Scientific, 1999.
[31] B. Biegel, P. Andersen, J. Stoustrup, and J. Bendtsen. Congestion manage-ment in a smart grid via shadow prices, Sept. 2012.
[32] S. Boyd and L. Vandenberghe. Convex optimization. Cambridge Univ. Press,2004.
[33] S. Boyd, L. Xiao, and A. Mutapcic. Subgradient methods. Lecture notes, Oct2005.
[34] L. Bui, A. Eryilmaz, R. Srikant, and Xinzhou Wu. Joint asynchronous con-gestion control and distributed scheduling for multi-hop wireless networks.In INFOCOM 2006. 25th IEEE International Conference on Computer Commu-nications. Proceedings, pages 1–12, April 2006.
[35] E.F. Camacho and C. Bordons. Model predictive control. Springer, 2004.
[36] M. Carmo, D.L. Fritz, J.M., and D. Stolten. A comprehensive review on{PEM} water electrolysis. International Journal of Hydrogen Energy, 38(12):4901 – 4934, 2013.
[37] J. Chen, W. Xu, S. He, Y. Sun, P. Thulasiraman, and X. Shen. Utility-basedasynchronous flow control algorithm for wireless sensor networks. SelectedAreas in Communications, IEEE Journal on, 28(7):1116–1126, September2010.
[38] G.C. Chow. Optimal control without solving the bellman equation. Journalof Economic Dynamics and Control, 17(4):621 – 630, 1993.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
138 BIBLIOGRAPHY
[39] L. Chunlin and Li. Layuan. Multi economic agent interaction for optimizingthe aggregate utility of grid users in computational grid. Applied Intelligence,25(2):147–158.
[40] Smart Enegry Collective. An introduction to the Universal Smart EnergyFramework. Arnhem, the Netherlands, 2014.
[41] M. Dentice dAccadia, M. Sasso, S. Sibilio, and L. Vanoli. Micro-combinedheat and power in residential and light commercial applications. AppliedThermal Engineering, 23(10):1247 – 1259, 2003. ISSN 1359-4311.
[42] R. Deng, Z. Yang, J. Chen, N. R. Asr, and M. Y. Chow. Residential en-ergy consumption scheduling: A coupled-constraint game approach. IEEETransactions on Smart Grid, 5(3):1340–1350, May 2014.
[43] R. Donders, J. Holstein, and E.W.M.F. Van der Putten. Groen Gas Invoedingin het Gasnet: Scenario Ontwikkeling. Agentschap NL, Utrecht, 2010.
[44] D. K. H. Tan F. P. Kelly, A. K. Maulloo. Rate control for communicationnetworks: Shadow prices, proportional fairness and stability. The Journal ofthe Operational Research Society, 49(3):237–252, 1998.
[45] Z. Fan. A distributed demand response algorithm and its application to phevcharging in smart grids. IEEE Transactions on Smart Grid, 3(3):1280–1290,Sept 2012.
[46] G. Frison and J. B. JŁrgensen. Efficient implementation of the riccati recur-sion for solving linear-quadratic control problems. In Control Applications(CCA), 2013 IEEE International Conference on, pages 1117–1122, Aug 2013.doi: 10.1109/CCA.2013.6662901.
[47] L.M. Gandia, G. Arzamedi, and P.D. Dieguez. Renewable hydrogen tech-nologies: Production, purification, storage, applications and safetys. Elsevier,2013.
[48] E. Ghadimi, M. Johansson, and I. Shames. Accelerated gradient methodsfor networked optimization. In American Control Conference (ACC), 2011,pages 1668–1673, June 2011.
[49] A. Ghouali, T. Sari, and J. Harmand. Maximizing biogas production fromthe anaerobic digestion. Journal of Process Control, 36:79 – 88, 2015.
[50] P. Giselsson. A generalized distributed accelerated gradient method fordistributed model predictive control with iteration complexity bounds. InAmerican Control Conference (ACC), 2013, pages 327–333, June 2013.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
BIBLIOGRAPHY 139
[51] P. Giselsson and A. Rantzer. Distributed model predictive control withsuboptimality and stability guarantees. In Decision and Control (CDC), 201049th IEEE Conference on, pages 7272–7277, Dec 2010.
[52] P. Giselsson and A. Rantzer. On feasibility, stability and performance indistributed model predictive control. IEEE Transactions on Automatic Control,59(4):1031–1036, April 2014. ISSN 0018-9286. doi: 10.1109/TAC.2013.2285779.
[53] P. Giselsson, M.D. Doan, T. Keviczky, B.De Schutter, and A. Rantzer. Ac-celerated gradient methods and dual decomposition in distributed modelpredictive control. Automatica, 49(3):829 – 833, 2013.
[54] P. Giselsson, M.D. Doan, T. Keviczky, B.De Schutter, and A. Rantzer. Ac-celerated gradient methods and dual decomposition in distributed modelpredictive control. Automatica, 49(3):829 – 833, 2013.
[55] L. Grond, P. Schulze, and J. Holstein. System analyses Power-to-Gas. DNV GLReport, June 2013.
[56] M.A. Hessami, S. Christensen, and R. Gani. Anaerobic digestion of householdorganic waste to produce biogas. Renewable Energy, 9(14):954 – 957, 1996.
[57] M. Houwing, R.R. Negenborn, and B. De Schutter. Demand response withmicro-chp systems. Proceedings of the IEEE, 99(1):200–213, Jan 2011.
[58] IEA.Bioenergy-2006.
[59] O.C. Imer and T. Basar. Dynamic optimization flow control. In Decisionand Control, 2003. Proceedings. 42nd IEEE Conference on, volume 3, pages2082–2087 Vol.3, Dec 2003.
[60] M. Kahl, C. Freye, and T. Leibfried. A cooperative multi-area optimiza-tion with renewable generation and storage devices. Power Systems, IEEETransactions on, 30(5):2386–2395, Sept 2015.
[61] M. Kezunovic, V. Vittal, S. Meliopoulos, and T. Mount. The big picture:Smart research for large-scale integrated smart grid solutions. IEEE Powerand Energy Magazine, 10(4):22–34, July 2012.
[62] B.H. Kim and R. Baldick. A comparison of distributed optimal power flowalgorithms. Power Systems, IEEE Transactions on, 15(2):599–604, May 2000.
[63] A. Kirubakaran, Shailendra Jain, and R.K. Nema. A review on fuel celltechnologies and power electronic interface. Renewable and SustainableEnergy Reviews, 13(9):2430 – 2440, 2009.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
140 BIBLIOGRAPHY
[64] W.L. Kling, M. Gibescu, B.C. Ummels, and R.L. Hendriks. Implementation ofwind power in the dutch power system. In Power and Energy Society GeneralMeeting - Conversion and Delivery of Electrical Energy in the 21st Century,2008 IEEE, pages 1–6, July 2008.
[65] D.P. Kothari and I.J. Nagrath. Modern power system analysis. NEw Delhi:Macgraw-Hill College, 2003.
[66] I. Kuiper. Power-to-Gas, the missing link? MS thesis, Production Technologyand Logistics, University of Groningen, 2014.
[67] J. Kupecki, M. Skrzypkiewicz, M. Wierzbicki, and M. Stepien. Analysisof a micro-chp unit with in-series {SOFC} stacks fed by biogas. EnergyProcedia, 75:2021 – 2026, 2015. Clean, Efficient and Affordable Energy fora Sustainable Future: The 7th International Conference on Applied Energy(ICAE2015).
[68] G.K.H. Larsen, N.D. van Foreest, and J.M.A. Scherpen. Distributed controlof the power supply-demand balance. Smart Grid, IEEE Transactions on, 4(2):828–836, June 2013.
[69] G.K.H. Larsen, N.D. van Foreest, and J.M.A. Scherpen. Power supplyde-mand balance in a smart grid: An information sharing model for a marketmechanism. Applied Mathematical Modelling, 38(13):3350 – 3360, 2014.
[70] G.K.H. Larsen, N.D. van Foreest, and J.M.A. Scherpen. Distributed mpcapplied to a network of households with micro-chp and heat storage. SmartGrid, IEEE Transactions on, 5(4):2106–2114, July 2014.
[71] J. Lavaei, A. Rantzer, and S.H. Low. Power flow optimization using positivequadratic programming. 2011.
[72] J.W. Lee, M. Chiang, and A.R. Calderbank. Price-based distributed algo-rithms for rate-reliability tradeoff in network utility maximization. SelectedAreas in Communications, IEEE Journal on, 24(5):962–976, May 2006.
[73] N. Li, L. Chen, and S. H. Low. Optimal demand response based on utilitymaximization in power networks. In Power and Energy Society GeneralMeeting, 2011 IEEE, pages 1–8, July 2011.
[74] P. Loesoenen. Combined heat and power (chp) plant statistics in the eu2000. Statistics in Focus, Theme, 8, 2003.
[75] S.H. Low. Convex relaxation of optimal power flow; part i: Formulationsand equivalence. IEEE Transactions on Control of Network Systems, 1(1):15–27, March 2014.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
BIBLIOGRAPHY 141
[76] S.H. Low and D.E. Lapsley. Optimization flow control. i. basic algorithm andconvergence. Networking, IEEE/ACM Transactions on, 7(6):861–874, Dec1999.
[77] D.G. Luenberger. Microeconomics theory. New York: Mcgraw-Hill College,1994.
[78] J.M. Macijowski. Predictive control with constraints. Prentice Hall, 2002.
[79] C. Mao, Y. Feng, and and G. Ren X. Wang. Review on research achievementsof biogas from anaerobic digestion. Renewable and Sustainable EnergyReviews, 45:540 – 555, 2015.
[80] D.Q. Mayne, J.B. Rawlings, C.V. Rao, and P.O.M. Scokaert. Constrainedmodel predictive control: Stability and optimality. Automatica, 36(6):789 –814, 2000.
[81] A. Mercurio, A. Di Giorgio, and A. Quaresima. Distributed control approachfor community energy management systems in presence of storage. InControl Automation (MED), 2012 20th Mediterranean Conference on, pages1303–1308, July 2012.
[82] M. Morari and J.H. Lee. Model predictive control: past, present and future.Computers and Chemical Engineering, 23(45):667 – 682, 1999.
[83] M. Honarvar Nazari, Z. Costello, M. J. Feizollahi, S. Grijalva, and M. Egerst-edt. Distributed frequency control of prosumer-based electric energy systems.IEEE Transactions on Power Systems, 29(6):2934–2942, Nov 2014.
[84] A.D. Ondeck, T.F. Edgar, and M. Baldea. Optimal operation of a residentialdistrict-level combined photovoltaic/natural gas power and cooling system.Applied Energy, 156:593 – 606, 2015.
[85] D.P. Palomar and Mung Chiang. A tutorial on decomposition methodsfor network utility maximization. Selected Areas in Communications, IEEEJournal on, 24(8):1439–1451, Aug 2006.
[86] V. Pando, J.G. Laguna, L.A. San-Jos, and J. Sicilia. Maximizing profits inan inventory model with both demand rate and holding cost per unit timedependent on the stock level. Computers and Industrial Engineering, 62(2):599 – 608, 2012.
[87] M. Pehnt. Micro cogeneration: towards decentralized energy systems. Berlin,Germany: Springer, 2006.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
142 BIBLIOGRAPHY
[88] M. Persson, O. Jonsson, and A. Wellinger. Biogas upgrading to vehicle fuelstandards and grid injection. IEA Bioenergy Task 37, 2006.
[89] A. Petersson and A. Wellinger. Biogas upgrading technologies-Developmentsand innovations 2009. IEA Bioenergy Task 37.
[90] B. Polyrak. Introduction to optimization. 1987.
[91] J. Ros, J. Olivier, and J. Notenboom. Sustainability of biomass in a bio-basedeconomy. PBL Netherlands Environmental Assessment Agency, Feb. 2012.
[92] W. Rudin. Principles of mathematical analysis. McGraw-Hill Inc., thirdedition, 1976.
[93] T. Sansawatt, J. R. G. Whiteford, and G. P. Harrison. Assessing the impact ofmicro chp on gas and electricity distribution networks. In Universities PowerEngineering Conference (UPEC), 2009 Proceedings of the 44th International,pages 1–5, Sept 2009.
[94] X. Tan, Y. Wu, and D.H.K. Tsang. Optimal energy trading with batteryenergy storage under dynamic pricing. In Smart Grid Communications(SmartGridComm), 2014 IEEE International Conference on, pages 722–727,Nov 2014.
[95] N. Trichakis, A. Zymnis, and S. Boyd. Dynamic network utility maximizationwith delivery contracts. In 17th IFAC, pages 2907–2912, July 2008.
[96] P. Van den Oosterkamp. The role of DSOs in a smart grid environment. ECNReport, 2014.
[97] M.J.N. van Werven and M.J.J. Scheepers. The changing role of distributionsystem operators in liberalized and decentralizing electricity market. ECNReport, 2005.
[98] A.N. Venkat, I.A. Hiskens, J.B. Rawlings, and S.J. Wright. Distributed mpcstrategies with application to power system automatic generation control.Control Systems Technology, IEEE Transactions on, 16(6):1192–1206, Nov2008.
[99] E. Vrettos, K. Lai, F. Oldewurtel, and G. Andersson. Predictive control ofbuildings for demand response with dynamic day-ahead and real-time prices.In Control Conference (ECC), 2013 European, pages 2527–2534, July 2013.
[100] C. Wang, P.B. Luh, P. Gribik, L. Zhang, and T. Peng. The subgradient-simplexbased cutting plane method for convex hull pricing. In Power and EnergySociety General Meeting, 2010 IEEE, pages 1–8, July 2010.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
BIBLIOGRAPHY 143
[101] E. Wei, A. Ozdaglar, A. Eryilmaz, and A. Jadbabaie. A distributed newtonmethod for dynamic network utility maximization with delivery contracts.In Information Sciences and Systems (CISS), 2012 46th Annual Conference on,pages 1–6, March 2012.
[102] T.D. Weidenaar, D. Hoesktra, and W. Wolters. Development options forthe dutch gas distribution grid in a changing gas market. In InternationalConference on Networking, Sensing and Control, 2011 IEEE, April 2011.
[103] S. You, F. Marra, and C. Traeholt. Integration of fuel cell micro-chps onlow voltage grid: A danish case study. In Power and Energy EngineeringConference (APPEEC), 2012 Asia-Pacific, pages 1–4, March 2012.
[104] C. Zhang, H. Su, J. Baeyens, and T. Tan. Reviewing the anaerobic digestionof food waste for biogas production. Renewable and Sustainable EnergyReviews, 38:383 – 392, 2014.
[105] Y. Zong, D. Kullmann, A. Thavlov, O. Gehrke, and H.W. Bindner. Applicationof model predictive control for active load management in a distributedpower system with high wind penetration. Smart Grid, IEEE Transactions on,3(2):1055–1062, June 2012.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
BIBLIOGRAPHY 145
(PtG)

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Summary
Because of the introduction of decentralized energy generators, e.g., micro-CombinedHeat and Power (μ-CHP) and Power-to-Gas (PtG) facility, traditionally independentenergy systems, including electricity, gas, and heat energy systems, become physi-cally and economically coupled. The energy end-users may have the decentralizedenergy generators. Hence, we call them the energy prosumers. As a consequence,the energy flow will become bidirectional, come from multiple sources at multiplelocations, and may have varying qualities. The way on how energy services are gen-erated, delivered, and traded will then be different in the next coming years. Theenergy distribution grid operators need to change their passive grid managementto active grid management in an effort to maintain their grid stability.
This thesis contributes to the issue by proposing bidirectional communicationbetween the energy prosumers and their connected energy grid operators to reachan agreement on maximum allowable amount of energy that the prosumers can askand offer to the energy grid operators. The proposed bidirectional communicationresults from solving the optimal control problem of the prosumers and energy gridoperators in a distributed fashion, using the dual decomposition method combinedwith a gradient projection approach. Anticipating the future condition on theenergy grids and on the prosumers supply and demand profiles, we formulate theoptimal control problem in the model predictive control framework.
As both prosumers and grid operators may practically not have access to acommon clock when solving their optimization problem and when sharing theirinformation, we take into account the presence of asynchronous exchange informa-tion on the implementation of the bidirectional communication. The correspondingalgorithm is analytically proved and applied for a setup consisting of PtG facilitiesembedded in a gas grid, mobility industrial grid, and power grid.
Moreover, we consider a large number of prosumers building a community andembedded in multiple energy grids. The prosumers are equipped with μ-CHP andsmart appliances enabling them to have some internal flexibilities to optimally

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
148 Summary
utilize their energy source. We employ an information topology, allowing theprosumers to help their neighboring prosumers to satisfy local energy demand. Wepropose an asynchronous bidirectional communication between the prosumers andtheir neighboring prosumers within the community.
Besides the help from the neighboring prosumers in the community, it is desir-able for the prosumers to own energy storage devices in order to mitigate their localimbalance between supply and demand. The existence of the storage devices leadsus to incorporate the dynamics when implementing the asynchronous bidirectionalcommunication between the prosumers and their neighboring prosumers withincommunity and between the prosumers and their connected energy grid operators.We prove analytically the convergence of the associated algorithm for this dynamiccase. Furthermore, we employ a number of case studies to exploit the behavior ofbidding process between a prosumer and its neighboring prosumers and betweena prosumer and connected energy grid operator and to examine the energy gridoperators’ reaction when foreseeing overloading and underloading grids.

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
Samenvatting
De introductie van gedecentraliseerde energie generatoren, zoals zogeheten mi-cro Warmte Kracht Koppel systemen (μ-WKK) en Power-to-Gas (PtG) faciliteiten,heeft significante gevolgen voor het energienetwerk. Een van deze gevolgen isdat traditioneel onafhankelijke energie systemen, zoals elektriciteit, gas en ver-warming systemen, fysiek en economisch gekoppeld worden. Een ander gevolgis dat als de eindgebruikers de gedecentraliseerde energie generatoren hebben,ze de rol aannemen van energie prosument. Dit resulteert in een wederzijdseenergiestroom tussen prosument en het netwerk, welke gegenereerd wordt doormeerdere bronnen op meerdere locaties varierend in kwaliteit. De wijze waaropenergiediensten gegenereerd, geleverd en uitgewisseld worden gaat hierdoor ver-anderen in de komende jaren. Dit vergt dat de netwerkbeheerders omschakelenvan passief netwerkmanagement naar actief netwerkmanagement om de stabiliteitvan het netwerk te waarborgen. Dit proefschrift draagt bij aan het oplossen van hetprobleem door een wederzijdse communicatie tussen de energieprosument en derelevante energie netwerkbeheerder te introduceren. Dit protocol heeft als doel omovereenstemming te bereiken tussen de maximaal toegestane hoeveelheid energiedie prosumenten kunnen vragen en aanbieden aan de energienetwerkbeheerder.De voorgestelde wederzijdse communicatie resulteert in het oplossen van een opti-maal regelprobleem van de prosumenten en de energie netwerkbeheerders op eengedistribueerde wijze, gebruikmakend van de duale decompositie methode gecom-bineerd met een gradint projectie aanpak. Anticiperend op de toekomstige staatvan de energienetwerken en op de toekomstige vraag- en aanbodprofielen van deprosumenten, formuleren we het optimale regel probleem in het model predictivecontrol kader. Zowel de prosumenten als de netwerkbeheerders hebben mogelijkgeen toegang tot een gedeelde klok voor het oplossen van hun optimalisatiepro-bleem. Om deze reden houden we rekening met de aanwezigheid van asynchroneinformatie-uitwisseling voor de implementatie van de wederzijdse communicatie.Het bijbehorende algoritme is analytisch aantoonbaar correct. Het is toegepast op

Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016Processed on: 10-8-2016
504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano504563-L-bw-Alkano
150 Samenvatting
een opstelling bestaande uit PtG faciliteiten die onderdeel uitmaken van een gasnetwerk, een industrieel mobiliteitsnetwerk en een elektriciteitsnetwerk. Naast hetbovenstaande beschouwen we een groot aantal prosumenten die een gemeenschapbouwen die onderdeel uit maakt van meerdere energienetwerken. De prosumentengebruiken μ-WKK en slimme toepassingen om middels interne flexibiliteit hunenergiebron optimaal te benutten. Middels een informatietopologie stellen weprosumenten in staat om hun naburige prosumenten te helpen om aan hun lokaleenergiebehoefte te voldoen en we stellen een asynchrone wederzijdse communica-tie tussen de prosumenten en hun naburige prosumenten in de gemeenschap voor.Het is, naast het hebben van hulp van de naburige prosumenten in de gemeenschap,wenselijk voor de prosumenten om eigen energie-opslagapparaten te hebben zodatze hun lokale onbalans tussen vraag en aanbod kunnen opvangen. Het bestaanvan de opslagapparaten zorgt er voor dat we de dynamica moeten integreren metde implementatie van de asynchrone wederzijdse communicatie. Deze integratieis relevant voor zowel de prosumenten en hun naburige prosumenten als voor deprosumenten en de aangesloten energienetwerkbeheerders. We bewijzen de con-vergentie van het bijbehorende algoritme analytisch voor deze dynamische situatie.Hiernaast bekijken we een aantal situaties om het gedrag van het biedproces tussenzowel een prosument en de naburige prosumenten als tussen een prosument en eenaangesloten energienetwerkbeheerder te verkennen. Ook verkennen we de reactievan de energienetwerkbeheerder op het vooruitzicht van over- en onderbelastingvan het netwerk.