Two DOF vehicle response analysis
6
DCU Faculty of Engineering & Computing. School of Mechanical and Manufacturing Engineering Two DOF vehicle response MM401 Mechanical Engineering System Simulation Neville Lawless 10212298
-
Upload
neville-lawless -
Category
Documents
-
view
217 -
download
0
Transcript of Two DOF vehicle response analysis

8/2/2019 Two DOF vehicle response analysis
http://slidepdf.com/reader/full/two-dof-vehicle-response-analysis 1/6
DCU Faculty of Engineering & Computing.
School of Mechanical and Manufacturing Engineering
Two DOF vehicle
responseMM401 Mechanical Engineering System Simulation
Neville Lawless
10212298

8/2/2019 Two DOF vehicle response analysis
http://slidepdf.com/reader/full/two-dof-vehicle-response-analysis 2/6
P a g e | 1
Contents1. Problem Constants .......................................................................................................................... 1
2. Free body diagram .......................................................................................................................... 2
3. Global problem equations .............................................................................................................. 4
4. Results ............................................................................................................................................. 5
1. Problem Constants
Vehicle mass (m) = 9.2tonnes = 9.2x103kg
Mass distribution = 37:63 (front: rear)
Total length of vehicle = 9.2 metres
Wheelbase = 5.6 metres
Vehicle velocity (V) = 45k.p.h = 12.5m/s
Wavelength 1 (λ1) = 4 metres
Wavelength 2 (λ2) = 6 metres
Stiffness of springs (k) = Front (Kf ) = 800 kN/m Rear (KR)=1050 kN/m

8/2/2019 Two DOF vehicle response analysis
http://slidepdf.com/reader/full/two-dof-vehicle-response-analysis 3/6
P a g e | 2
Radius of gyration (r) = 1.95m
Amplitude = 0.04m
2. Free body diagram
Distance from front of vehicle to centre of gravity (a)
metresa
a
ondistributimassgthVehiclelena
733.5
63.0*1.9
%*
Distance from rear of vehicle to centre of gravity (b)
metresa
a
ondistributimassgthVehiclelena
367.3
37.0*1.9
%*
Values for lf and lr are then found to be:
lf = 4.233m lr = 1.367m
Moment of inertia (I)
2
2
2
34983
95.1*9200
)(
kgm I
I
mr I inertiaof moment
Natural frequency (f)
v f
f v
*

8/2/2019 Two DOF vehicle response analysis
http://slidepdf.com/reader/full/two-dof-vehicle-response-analysis 4/6
P a g e | 3
There will be two different values for the natural frequency because there are two different
wavelengths to consider (f 1 for 4 metres and f 2 for 9 metres wavelengths)
hz f
hz f
083.26
5.12
125.34
5.12
2
1
Frequency (ω)
There will also be two different values for the frequency as there are two values to input as
the natural frequency (f 1 and f 2)
f 2
sec / 087.13**2
sec / 635.19**2
22
11
rad f
rad f
External forces
)(2
2
t kbSinFr
t kbSinFf
Where b is the wave road profiles amplitude = 0.04m
and is the phase lag for the rear wheel.
Phase lag (Φ)
As with the frequency there will also be two phase lags. This phase lag is how much the
cosine wave lags behind the sine wave and is only applied to the rear of the vehicle
)lrlf (2
rad
rad
86.56
)6.5(*2
79.84
)6.5(*2
2
1

8/2/2019 Two DOF vehicle response analysis
http://slidepdf.com/reader/full/two-dof-vehicle-response-analysis 5/6
P a g e | 4
3. Global problem equations
r r t r r r f f f gg
r t r r f f
lF lF ll zk ll zk I θ
F F l zk l zk m z
f
..
..
Rearranging;
r r t r f f r r f f r r gg
r t lf r r r f
lF lF llk lk lk lk z I θ
F F kf lk k k zm z
f
22
..
..
In matrix format;
[ gg I ] ..
z..
θ r f k k lf r r kf lk
lf r r kf lk 22
f f r r lk lk { } r t F F
r r t lF lF f
letting; Z = zSin(wt) & = Sin(wt)
{ } = { } {
}
{ } { } { }
Yielding;
[ gg I ] { } r f k k lf r r kf lk
lf r r kf lk 22 f f r r lk lk
{ } r t F F
r r t lF lF f
{ } r f F F
r r t lF lF f
Applying Cramer’s rule:
| r t F F
r r t lF lF f
|
| |

8/2/2019 Two DOF vehicle response analysis
http://slidepdf.com/reader/full/two-dof-vehicle-response-analysis 6/6
P a g e | 5
| r t F F
r r t lF lF f |
|
|
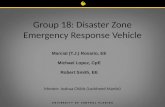
4. Results
On examining the mode shapes graph plot above we can see that the optimal ride position is
placed in front of the centre of gravity at a distance of just less than 0.5m
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-2 -1 0 1 2 3 4 5 D i s p l a c e m e n t ( m )
Amplitude of vibration wrt centre of gravity (m)
Mode Shapes
4m Wavelenght
6m wavelenght
wavelenght @ 4m
x1 top = 2.72806E+11 X1= -0.03182 x2 top = -2.60613E+11 X2= 0.030395
x bottom = -8.5743E+12 x bottom = -8.5743E+12
wavelenght @ 6m
x1 top = -4.47493E+11 X1= 0.05219 x2 top = 1.80481E+11 X2= -0.02105
x bottom = -9.797E+11 x bottom = -9.797E+11