Tutorial Visual Perception 1.Towards Computer Vision 2.Steps in 3D Object Modelling 3.Camera...
10
Tutorial Visual Perception 1. Towards Computer Vision 2. Steps in 3D Object Modelling 3. Camera Modelling and Calibration 4. StereoVision & Epipolar Geometry 5. Fundamental Matrix Estimation 6. Coded Structured Light
-
Upload
logan-booker -
Category
Documents
-
view
217 -
download
0
Transcript of Tutorial Visual Perception 1.Towards Computer Vision 2.Steps in 3D Object Modelling 3.Camera...

Tutorial
Visual Perception
1. Towards Computer Vision
2. Steps in 3D Object Modelling
3. Camera Modelling and Calibration
4. StereoVision & Epipolar Geometry
5. Fundamental Matrix Estimation
6. Coded Structured Light

Human Vision:• Identify objects • Locate its 3D position.
Image acquisition
Image interpretation

The Human Eye ?
Image enhancement: • Cornea: Transparent surface. • Lens: Focuses the light to the retina surface to perform proper focus of near and distant objects.• Iris: Acts as a diaphragm to control the amount of light entering the eye.
Eye shape:• Cornea: Transparent surface.• Sclera: Outer cover composed of a fibrous coat that surrounds the choroid.• Choroid: a layer of blood capillaries.• Retina: layer inside the choroid composed of two types of receptors (rods and cones) and a netword of nerves.• Optic nerve: Retinal nerves leave the eye to the brain trough the optic nerve bundle.

How an eye is working ?
Image acquisition: • Retina: Composed of
• 100 M. Rods: Long slender receptors. Sensitive at low levels of light.
• 6.5 M. Cones. Shorter and thicker receptors.Sensitive at high levels of light.Greatest presence at the Fovea region (sharpest
vision).• Three types of cones with different wavelength absorption with peaks in the blue, green and red light spectrum
• Light stimulus activate a rod or cone producing a nerve impulse which is transmitted through the optic nerve.
More information at: http://www.vision.ca/eye/lobby.html

Computer Vision:Object Recognition. Object Localisation.
Advantage: Automatisation.Constraint: Difficult to transmit the human intelligence and skills to a computer.
Applications:Shape Inspection for quality controlRapid PrototypingComputer assisted surgeryFilm making effectsObject pickingRobot Navigation
Image acquisition
Image interpretation

INTERPRETATIONKNOWLEDGE
BASEDATABASE
InterpretationLevel
SCENEDESCRIPTIONFUSION TRACKING
SHAPEIDENTIFICATION
LOCALIZATIONSCENEANALYSIS
SEGMENTATION
3DINFORMATION
FEATUREEXTRACTION
MOVEMENTDETECTION
TEXTUREANALYSIS
IMAGERESTORATION
EDGERESTORATION
DescriptionLevel
Image ProcessingHigh Level
FILTERINGEDGE
THINNING
EDGEDETECTION
COLOURCOMPENSATION
THRESHOLDING
GRADIENTS
RE-HISTOGRAMATION
A/D
COLOURSEPARATION
SENSOR
Image AcquisitionLevel
Image ProcessingLow Level
3D Information
System selection
Modelling
Calibration
Correspondence
Get 3D Cloud
Data Fusion

System Selection
Combination of computational and optical techniques aimed at estimating or making explicit geometric (3D shape) properties of objects or scenes from their digital images.
• stereovision• pattern projection• laser scanning• shape from X (motion, texture, shading, focus, zoom)
Computation for all or some pixels of the distance between a known reference frame and the scene point that is imaged in those pixels. The output is a range image (depth map) or a cloud of points {(xi, yi, zi), i=1..N}.
The fusion of several range images or point clouds corresponding to partially different views of an object may yield its full 3D digitization.
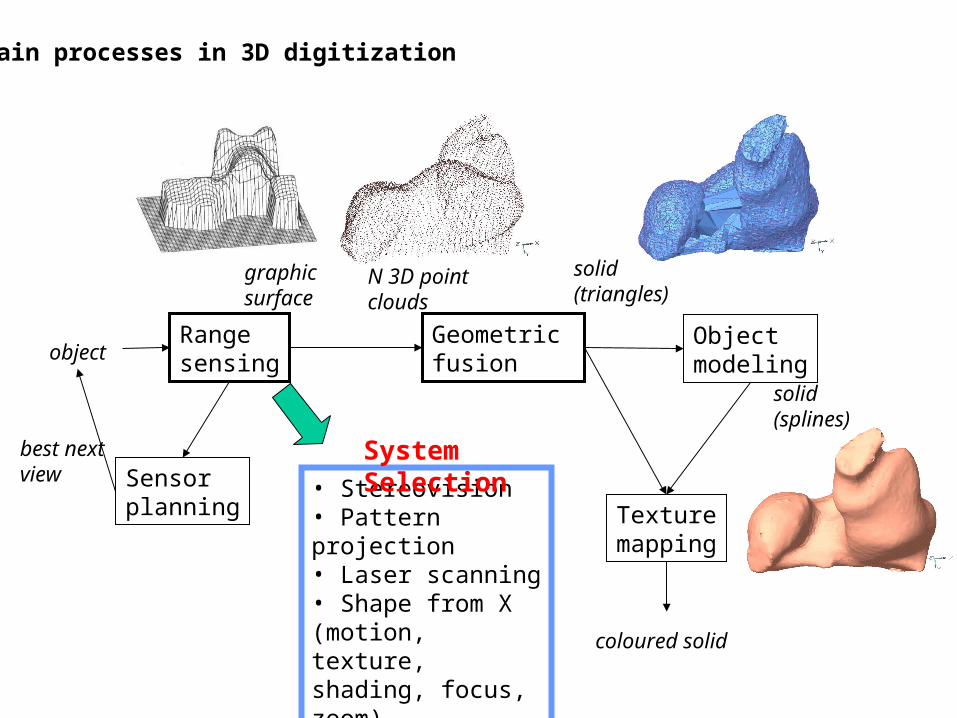
Main processes in 3D digitization
objectRange sensing
Geometric fusion
Objectmodeling
Texturemapping
Sensorplanning
N 3D pointclouds
solid(triangles)
solid(splines)
coloured solid
best nextview
graphicsurface
• Stereovision• Pattern projection• Laser scanning• Shape from X (motion, texture, shading, focus, zoom)
System Selection

24 aligned 3D scansready for merging
24 meshes merged into a surface triangulation.
set of six 3D scans acquired from different viewpoints and their alignment (center)
Geometric fusion

– Dense reconstruction – Visual inspection
– Object localization – Camera localization
PRTH
HTC CTW
WTR
Applications