Econ Fundies Cram Kit -- Draft 01 Cram Kit.pdf · Econ Fundies Cram Kit -- Draft 01 ... 2008

Trigonometry Cram Sheet
August 3, 2016
Contents1 Definition 2
1.1 Extensions to Angles > 90◦ . . . . . . . . . 21.2 The Unit Circle . . . . . . . . . . . . . . . . 21.3 Degrees and Radians . . . . . . . . . . . . . 21.4 Signs and Variations . . . . . . . . . . . . . 2
2 Properties and General Forms 32.1 Properties . . . . . . . . . . . . . . . . . . . 3
2.1.1 sin x . . . . . . . . . . . . . . . . . . . 32.1.2 cosx . . . . . . . . . . . . . . . . . . . 32.1.3 tan x . . . . . . . . . . . . . . . . . . . 32.1.4 cscx . . . . . . . . . . . . . . . . . . . 32.1.5 secx . . . . . . . . . . . . . . . . . . . 32.1.6 cotx . . . . . . . . . . . . . . . . . . . 3
2.2 General Forms of Trigonometric Functions . 3
3 Identities 43.1 Basic Identities . . . . . . . . . . . . . . . . 43.2 Sum and Difference . . . . . . . . . . . . . . 43.3 Double Angle . . . . . . . . . . . . . . . . . 43.4 Half Angle . . . . . . . . . . . . . . . . . . . 43.5 Multiple Angle . . . . . . . . . . . . . . . . 43.6 Power Reduction . . . . . . . . . . . . . . . 53.7 Product to Sum . . . . . . . . . . . . . . . . 53.8 Sum to Product . . . . . . . . . . . . . . . . 53.9 Linear Combinations . . . . . . . . . . . . . 53.10 Other Related Identities . . . . . . . . . . . 53.11 Identities without Variables . . . . . . . . . 6
4 Graphs 64.1 y = sin x . . . . . . . . . . . . . . . . . . . . 64.2 y = cosx . . . . . . . . . . . . . . . . . . . . 64.3 y = tan x . . . . . . . . . . . . . . . . . . . . 64.4 y = cscx . . . . . . . . . . . . . . . . . . . . 64.5 y = secx . . . . . . . . . . . . . . . . . . . . 64.6 y = cotx . . . . . . . . . . . . . . . . . . . . 6
5 Tables 75.1 Exact Values of Trigonometric Functions . . 75.2 Relations Between Trig Functions . . . . . . 8
6 Inverse Trigonometric Functions 86.1 Principal Values . . . . . . . . . . . . . . . . 8
6.2 Identities . . . . . . . . . . . . . . . . . . . 8
7 Relationships Between Sides and Angles 97.1 Law of Sines . . . . . . . . . . . . . . . . . . 97.2 Law of Cosines . . . . . . . . . . . . . . . . 97.3 Law of Tangents . . . . . . . . . . . . . . . 97.4 Law of Cotangents . . . . . . . . . . . . . . 97.5 Mollweide’s Formula . . . . . . . . . . . . . 97.6 Stewart’s Theorem . . . . . . . . . . . . . . 97.7 Angles in Terms of Sides . . . . . . . . . . . 9
8 Solving Triangles 108.1 AAS/ASA Triangle . . . . . . . . . . . . . . 108.2 SAS Triangle . . . . . . . . . . . . . . . . . 108.3 SSS Triangle . . . . . . . . . . . . . . . . . . 108.4 SSA Triangle . . . . . . . . . . . . . . . . . 118.5 Right Triangle . . . . . . . . . . . . . . . . . 11
9 Polar Coordinates 119.1 Properties . . . . . . . . . . . . . . . . . . . 119.2 Coordinate Transformation . . . . . . . . . 11
10 Special Polar Graphs 1110.1 Limaçon of Pascal . . . . . . . . . . . . . . 1210.2 Rose . . . . . . . . . . . . . . . . . . . . . . 1310.3 Spiral of Archimedes . . . . . . . . . . . . . 1310.4 Lemniscate of Bernoulli . . . . . . . . . . . 1310.5 Folium of Descartes . . . . . . . . . . . . . . 1410.6 Spiral of Fermat . . . . . . . . . . . . . . . . 1410.7 Cissoid of Diocles . . . . . . . . . . . . . . . 1410.8 Epispiral . . . . . . . . . . . . . . . . . . . . 1410.9 Lituus . . . . . . . . . . . . . . . . . . . . . 1510.10 Eight Curve . . . . . . . . . . . . . . . . . . 1510.11 Butterfly Curve . . . . . . . . . . . . . . . . 1510.12 Strophoid . . . . . . . . . . . . . . . . . . . 1510.13 Cochleoid . . . . . . . . . . . . . . . . . . . 1610.14 Cycloid of Ceva . . . . . . . . . . . . . . . . 1610.15 Freeth’s Nephroid . . . . . . . . . . . . . . . 16
11 Miscellaneous Stuff 1711.1 Pythagorean Triples . . . . . . . . . . . . . 1711.2 Triangle Centers . . . . . . . . . . . . . . . 1711.3 Area of the Triangle . . . . . . . . . . . . . 1811.4 Other Coordinate Systems . . . . . . . . . . 18
1

Trigonometry Cram Sheet alltootechnical.tk
1 Definition
Triangle ABC has a right angle at C and sides of length a,b, c. The trigonometric functions of angle A are defined asfollows:
1. sinA = a
c= opposite
hypotenuse
2. cosA = b
c= adjacent
hypotenuse
3. tanA = a
b= opposite
adjacent
4. cscA = c
a= hypotenuse
opposite
5. secA = c
b= hypotenuse
adjacent
6. cotA = b
a= adjacent
opposite
1.1 Extensions to Angles > 90◦
A point P in the Cartesian plane has coordinates (x, y),where x is considered as positive along OX and negativealong OX ′, while y is considered as positive along OY ′ andnegative along OY . The distance from origin O to point Pis positive and denoted by r =
√x2 + y2. The angle A de-
scribed counterclockwise from OX is considered positive. Ifit is described clockwise from OX it is considered negative.
For an angle A in any quadrant, the trigonometric functionsof A are defined as follows:
1. sinA = y
r
2. cosA = x
r
3. tanA = y
x
4. cscA = r
y
5. secA = r
x
6. cotA = x
y
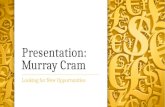
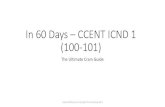
1.2 The Unit Circle
x
y
0◦
30◦
60◦90◦
120◦
150◦
180◦
210◦
240◦270◦
300◦
330◦
360◦
π6
π4
π3
π2
2π3
3π4
5π6
π
7π6
5π4
4π3
3π2
5π3
7π4
11π6
2π
(√3
2 ,12
)(√
22 ,√
22
)(
12 ,√
32
)
(−√
32 ,
12
)(−√
22 ,√
22
)(− 1
2 ,√
32
)
(−√
32 ,−
12
)(−√
22 ,−
√2
2
)(− 1
2 ,−√
32
)
(√3
2 ,−12
)(√
22 ,−
√2
2
)(
12 ,−
√3
2
)
(−1, 0) (1, 0)
(0,−1)
(0, 1)
1.3 Degrees and Radians
A radian is that angle θ subtended at center O of a circle byan arc MN equal to the radius r. Since 2π radians = 360◦we have:
1 radian = 180◦/π = 57.29577951308232 . . . ◦
1◦ = π/180 radians = 0.017453292519943 . . . radians
1.4 Signs and Variations
Quadrant sinA cosA tanA
I +(0, 1)
+(1, 0)
+(0,∞)
II +(1, 0)
−(0,−1)
−(−∞, 0)
III −(0,−1)
−(−1, 0)
+(0,∞)
IV −(−1, 0)
+(0, 1)
−(−∞, 0)
Quadrant cotA secA cscA
I +(∞, 0)
+(1,∞)
+(∞, 1)
II −(0,−∞)
−(∞,−1)
+(1,∞)
III +(∞, 0)
−(−1,∞)
−(∞,−1)
IV −(0,−∞)
+(∞, 1)
−(−1,∞)
2

Trigonometry Cram Sheet alltootechnical.tk
2 Properties and General Forms
2.1 Properties
2.1.1 sin x
Domain: {x|x ∈ R} or (−∞,+∞)
Range: {y| − 1 ≤ y ≤ 1} or [−1, 1]
Period: 2π
VA: none
x-intercepts: kπ where k ∈ Z
Parity: odd
2.1.2 cosx
Domain: {x|x ∈ R} or (−∞,+∞)
Range: {y| − 1 ≤ y ≤ 1} or [−1, 1]
Period: 2π
VA: none
x-intercepts: π2 + kπ where k ∈ Z
Parity: even
2.1.3 tan x
Domain:{x|x 6= π
2 + kπ, k ∈ Z}or⋃k∈Z
((k−1)π
2 , (k+1)π2
)Range: {y|y ∈ R} or (−∞,+∞)
Period: π
VA: x = π2 + kπ where k ∈ Z
x-intercepts: kπ where k ∈ Z
Parity: odd
2.1.4 cscx
Domain: {x|x 6= kπ, k ∈ Z}or⋃k∈Z (kπ, (k + 1)π)
Range: {y|y ≤ 1 ∪ y ≥ 1} or (−∞,−1] ∪ [1,+∞)
Period: 2π
VA: x = kπ where k ∈ Z
x-intercepts: none
Parity: odd
2.1.5 secx
Domain:{x|x 6= π
2 + kπ, k ∈ Z}or⋃k∈Z
((k−1)π
2 , (k+1)π2
)Range: {y|y ≤ 1 ∪ y ≥ 1} or (−∞,−1] ∪ [1,+∞)
Period: 2π
VA: x = π2 + kπ where k ∈ Z
x-intercepts: none
Parity: even
2.1.6 cotx
Domain: {x|x 6= kπ, k ∈ Z} or⋃k∈Z (kπ, (k + 1)π)
Range: {y|y ∈ R} or (−∞,+∞)
Period: π
VA: x = kπ where k ∈ Z
x-intercepts: π2 + kπ where k ∈ Z
Parity: odd
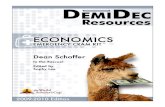
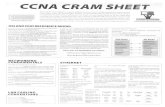
2.2 General Forms of Trigonometric Functions
Given some trigonometric function f (x), its general form is represented as y = Af (B (x− C)) +D, where its amplitudeis |A|, its period is 2π
|B| orπ|B| (for tangent and cotangent), its phase shift is C, and its vertical translation is D units
upward (if D > 0) or D units downward (if D < 0). The maximum and minimum value for sin x and cosx is A+D and−A+D respectively.
amplitude period phase shift vertical translation
−1 1 2 3
−2
−1
1
0
f
a
−1 1 2 3
−2
−1
1
0
f
a
−1 1 2 3
−2
−1
1
0
f
a
−1 1 2 3
−2
−1
1
0
f
a
3

Trigonometry Cram Sheet alltootechnical.tk
3 Identities
3.1 Basic Identities
Reciprocal Identities
csc θ = 1sin θ ; sin θ = 1
csc θ
sec θ = 1cos θ ; cos θ = 1
sec θ
cot θ = 1tan θ ; tan θ = 1
cot θsin θ csc θ = cos θ sec θ = tan θ cot θ = 1
Ratio Identities
tan θ = sin θcos θ ; cos θ = sin θ
tan θ ; sin θ = cos θ tan θ
cot θ = cos θsin θ ; sin θ = cos θ
cot θ ; cos θ = sin θ cot θ
Pythagorean Identities
sin2 θ + cos2 θ = 1; sin2 θ = 1− cos2 θ; cos2 θ = 1− sin2 θ
tan2 θ + 1 = sec2 θ; tan2 θ = sec2 θ − 1; sec2 θ − tan2 θ = 1
cot2 θ + 1 = csc2 θ; cot2 θ = csc2 θ − 1; csc2 θ − cot2 θ = 1
Co-function Identities
sin(π
2 − θ)
= cos θ
cos(π
2 − θ)
= sin θ
tan(π
2 − θ)
= cot θ
csc(π
2 − θ)
= sec θ
sec(π
2 − θ)
= csc θ
cot(π
2 − θ)
= tan θ
Parity Identities
sin (−A) = − sinA
cos (−A) = cosA
tan (−A) = − tanA
csc (−A) = − cscA
sec (−A) = secA
cot (−A) = − cotA
3.2 Sum and Difference
sin (α± β) = sinα cosβ ± cosα sin β
cos (α± β) = cosα cosβ ∓ sinα sin β
tan (α± β) = tanα± tan β1∓ tanα tan β
cot (α± β) = cotα cotβ ∓ 1cotβ ± cotα
3.3 Double Angle
sin 2α = 2 sinα cosα
cos 2α = cos2 α− sin2 α = 1− 2 sin2 α = 2 cos2 α− 1
tan 2α = 2 tanα1− tan2 α
3.4 Half Angle
Let Qn, where n ∈ {1, 2, 3, 4}, denote the set of all angleswithin the nth quadrant of the Cartesian plane.
sin α2 =
√
1−cosα2 if α2 ∈ (Q1 ∪Q2)
−√
1−cosα2 if α2 ∈ (Q3 ∪Q4)
cos α2 =
√
1+cosα2 if α2 ∈ (Q1 ∪Q4)
−√
1+cosα2 if α2 ∈ (Q2 ∪Q3)
tan α2 = sinα1 + cosα = 1− cosα
sinα = cscα− cotα
3.5 Multiple Angle
sin 3α = 3 sinα− 4 sin3 α
cos 3α = 4 cos3 α− 3 cosα
tan 3α = 3 tanα− tan3 α
1− 3 tan2 α
sin 4α = 4 sinα cosα− 8 sin3 α cosα
cos 4α = 8 cos4 α− 8 cos2 α+ 1
tan 4α = 4 tanα− 4 tan3 α
1− 6 tan2 α+ tan4 α
sin (nα) =n∑i=0
(n
i
)cosi α sinn−i α sin
((n− i)π
2
)
cos (nα) =n∑i=0
(n
i
)cosi α sinn−i α cos
((n− i)π
2
)
4

Trigonometry Cram Sheet alltootechnical.tk
3.6 Power Reduction
sin2 θ = 1− cos 2θ2
cos2 θ = 1 + cos 2θ2
tan2 θ = 1− cos 2θ1 + cos 2θ
sin3 θ = 3 sin θ − sin 3θ4
cos3 θ = 3 cos θ + cos 3θ4
sin4 θ = 3− 4 cos 2θ + cos 4θ8
cos4 θ = 3 + 4 cos 2θ + cos 4θ8
sin5 θ = 10 sin θ − 5 sin 3θ + sin 5θ16
cos5 θ = 10 cos θ + 5 cos 3θ + cos 5θ16
3.7 Product to Sum
sinα cosβ = 12 [sin (α+ β) + sin (α− β)]
cosα sin β = 12 [sin (α+ β)− sin (α− β)]
cosα cosβ = 12 [cos (α+ β) + cos (α− β)]
sinα sin β = 12 [cos (α+ β)− cos (α− β)]
3.8 Sum to Product
sin θ ± sinϕ = 2 sin θ ± ϕ2 cos θ ∓ ϕ2
cos θ + cosϕ = 2 cos θ + ϕ
2 cos θ − ϕ2
cos θ − cosϕ = −2 sin θ + ϕ
2 sin θ − ϕ2
3.9 Linear Combinations
For some purposes it is important to know that any linearcombination of sine waves of the same period or frequencybut different phase shifts is also a sine wave with the sameperiod or frequency, but a different phase shift.
Definition
The two-argument form of the arctangent function, denotedby tan−1 (y, x) gathers information on the signs of the in-puts in order to return the appropriate quadrant of the com-puted angle. Thus, it is defined as:
tan−1(y, x) =
tan−1 ( yx
)if x > 0,
tan−1 ( yx
)+ π if x < 0 and y ≥ 0,
tan−1 ( yx
)− π if x < 0 and y < 0,
+π2 if x = 0 and y > 0,−π2 if x = 0 and y < 0,undefined if x = 0 and y = 0.
Sine and Cosine
In the case of a non-zero linear combination of a sine andcosine wave (which is just a sine wave with a phase shift ofπ2 ), we have:
a sin x+ b cosx = c sin (x+ θ)
where c = ±√a2 + b2 and θ satisfies the equations c cos θ =
a and c sin θ = b, or θ = tan−1 (b, a).
Arbitrary Phase Shift
More generally, for an arbitrary phase shift, we have:
a sin x+ b sin (x+ θ) = c sin (x+ ϕ)
where c = ±√a2 + b2 + 2ab cos θ, and ϕ satisfies the equa-
tions c cosϕ = a + b cos θ and c sinϕ = b sin θ or ϕ =tan−1 (b sin θ, a+ b cos θ).
3.10 Other Related Identities
• If x + y + z = π, then sin 2x + sin 2y + sin 2z =4 sin x sin y sin z.
• Triple Tangent Identity. If x + y + z = π, thentan x+ tan y + tan z = tan x tan y tan z.
• Triple Cotangent Identity. If x + y + z = π2 , then
cotx+ cot y + cot z = cotx cot y cot z.
• Ptolemy’s Theorem. If w + x + y + z = π, thensin (w + x) sin (x+ y) = sinw sin y + sin x sin z.
• cotx cot y + cot y cot z + cot z cotx = 1
• a cosx+ b sin x =√a2 + b2 cos
(x− tan−1 (b, a)
)• Tangent of an Average. tan
(α+β
2
)= sinα+sin β
cosα+cos β =− cosα−cos β
sinα−sin β
• tan x+ secx = tan(x2 + π
4)
•n∑i=0
sin (ϕ+ iα) =sin (n+1)α
2 sin(ϕ+ nα
2)
sin α2
5

Trigonometry Cram Sheet alltootechnical.tk
•n∑i=0
cos (ϕ+ iα) =sin (n+1)α
2 cos(ϕ+ nα
2)
sin α2
•∞∑n=1
n∏m=1
cos mπ
2n+ 1 = 1
3.11 Identities without Variables
• Morrie’s Law. cos 20◦ · cos 40◦ · cos 80◦ = 18
• sin 20◦ · sin 40◦ · sin 80◦ =√
38
• cos 24◦ + cos 48◦ + cos 96◦ + cos 168◦ = 12
• cos 2π21 + cos
(2 · 2π
21)
+ cos(4 · 2π
21)
+ cos(5 · 2π
21)
+cos(8 · 2π
21)
+ cos(10 · 2π
21)
= 12
• cos π5 = cos 36◦ = 14 (√
5 + 1) = 12ϕ
• sin π
10 = sin 18◦ = 14 (√
5− 1) = 12ϕ−1
• sin2 18◦ + sin2 30◦ = sin2 36◦
4 Graphs4.1 y = sin x
−2π − 3π2−π −π2
π2
π 3π2
2π
−2
−1
1
2
4.2 y = cos x
−2π − 3π2−π −π2
π2
π 3π2
2π
−2
−1
1
2
4.3 y = tan x
−2π − 3π2−π −π2
π2
π 3π2
2π
−2
−1
1
2
4.4 y = csc x
−2π − 3π2−π −π2
π2
π 3π2
2π
−2
−1
1
2
4.5 y = sec x
−2π − 3π2−π −π2
π2
π 3π2
2π
−2
−1
1
2
4.6 y = cot x
−2π − 3π2−π −π2
π2
π 3π2
2π
−2
−1
1
2
6

Trigonometry Cram Sheet alltootechnical.tk
5 Tables
5.1 Exact Values of Trigonometric Functions
A◦ A rad sinA cosA tanA cotA secA cscA
0◦ 0 0 1 0 ∞ 1 ∞
15◦ π/12 14(√
6−√
2) 1
4(√
6 +√
2)
2−√
3 2 +√
3√
6−√
2√
6 +√
2
30◦ π/6 12
12√
3 13√
3√
3 23√
3 2
45◦ π/4 12√
2 12√
2 1 1√
2√
2
60◦ π/3 12√
3 12
√3 1
3√
3 2 23√
3
75◦ 5π/12 14(√
6 +√
2) 1
4(√
6−√
2)
2 +√
3 2−√
3√
6 +√
2√
6−√
2
90◦ π/2 1 0 ±∞ 0 ±∞ 1
105◦ 7π/12 14(√
6 +√
2)
− 14(√
6−√
2)−(2 +√
3)−(2−√
3)−(√
6 +√
2) √
6−√
2
120◦ 2π/3 12√
3 12 −
√3 − 1
3√
3 −2 23√
3
135◦ 3π/4 12√
2 − 12√
2 −1 −1 −√
2√
2
150◦ 5π/6 12 − 1
2√
3 − 13√
3 −√
3 − 23√
3 2
165◦ 11π/12 14(√
6−√
2)
− 14(√
6 +√
2)−(2−√
3)−(2 +√
3)−(√
6−√
2) √
6 +√
2
180◦ π 0 −1 0 ∓∞ −1 ±∞
195◦ 13π/12 − 14(√
6−√
2)− 1
4(√
6 +√
2)
2−√
3 2 +√
3 −(√
6−√
2)−(√
6 +√
2)
210◦ 7π/6 12 − 1
2√
3 13√
3√
3 − 23√
3 −2
225◦ 5π/4 − 12√
2 − 12√
2 1 1 −√
2 −√
2
240◦ 4π/3 − 12√
3 − 12
√3 1
3√
3 −2 − 23√
3
255◦ 17π/12 − 14(√
6 +√
2)− 1
4(√
6−√
2)
2 +√
3 2−√
3 −(√
6 +√
2)−(√
6−√
2)
270◦ 3π/2 −1 0 ±∞ 0 ∓∞ −1
285◦ 19π/12 − 14(√
6 +√
2) 1
4(√
6−√
2)
−(2 +√
3)−(2−√
3) √
6 +√
2 −(√
6−√
2)
300◦ 5π/3 − 12√
3 12 −
√3 − 1
3√
3 2 − 23√
3
315◦ 7π/4 − 12√
2 12√
2 −1 −1√
2 −√
2
330◦ 11π/6 − 12
12√
3 − 13√
3 −√
3 23√
3 −2
345◦ 23π/12 − 14(√
6−√
2) 1
4(√
6 +√
2)
−(2 +√
3)−(2 +√
3) √
6−√
2 −(√
6 +√
2)
360◦ 2π 0 1 0 ∓∞ 1 ∓∞
7

Trigonometry Cram Sheet alltootechnical.tk
5.2 Relations Between Trig Functions
sin θ = u cos θ = u tan θ = u csc θ = u sec θ = u cot θ = u
sin θ u√
1− u2 u√1 + u2
1u
√u2 − 1u
1√1 + u2
cos θ√
1− u2 u1√
1 + u2
√u2 − 1u
1u
u√1 + u2
tan θ u√1− u2
√1− u2
uu
1√u2 − 1
√u2 − 1 1
u
csc θ 1u
1√1− u2
√1 + u2
uu
u√u2 − 1
√1 + u2
sec θ 1√1− u2
1u
√1 + u2 u√
u2 − 1u
√1 + u2
u
cot θ√
1− u2
u
u√1− u2
1u
√u2 − 1 1√
u2 − 1u
6 Inverse Trigonometric Functions
If x = sin y, then y = sin−1 x, i.e. the angle whose sine is xor arcsine of x, is a multiple-valued function of x which is acollection of single-valued functions called branches. Simi-larly, the other inverse trigonometric functions are multiple-valued.For many purposes, a particular branch is required. This iscalled the principal branch and the values for this branchare called principal values.
6.1 Principal Values
Since none of the six trigonometric functions are one-to-one,they are restricted in order to have inverse functions. There-fore the ranges of the inverse functions are proper subsetsof the domains of the original functions.
Principal values for x ≥ 0 Principal values for x < 0
0 ≤ sin−1 x ≤ π2 −π2 ≤ sin−1 x < 0
0 ≤ cos−1 x ≤ π2
π2 < cos−1 x ≤ π
0 ≤ tan−1 x < π2 −π2 < tan−1 x < 0
0 < cot−1 x ≤ π2
π2 < cot−1 x < π
0 ≤ sec−1 x < π2
π2 < sec−1 x ≤ π
0 < csc−1 x ≤ π2 −π2 ≤ csc−1 x < 0
6.2 Identities
In all cases it is assumed that principal values are used.
Reciprocal Identities
sin−1 1x
= csc−1 x
cos−1 1x
= sec−1 x
csc−1 1x
= sin−1 x
sec−1 1x
= cos−1 x
tan−1 1x
={π2 − tan−1 x = cot−1 x if x > 0−π2 − tan−1 x = cot−1 x− π if x < 0
cot−1 1x
={π2 − cot−1 x = tan−1 x if x > 03π2 − cot−1 x = π + tan−1 x if x < 0
Negative Identities
sin−1 (−x) = − sin−1 x
cos−1 (−x) = π − cos−1 x
tan−1 (−x) = − tan−1 x
csc−1 (−x) = − csc−1 x
sec−1 (−x) = π − sec−1 x
cot−1 (−x) = π − cot−1 x
Complementary Identities
sin−1 x+ cos−1 x = π
2
tan−1 x+ cot−1 x = π
2
8

Trigonometry Cram Sheet alltootechnical.tk
sec−1 x+ csc−1 x = π
2
Sum and Difference Identities
sin−1 α± sin−1 β = sin−1(α√
1− β2 ± β√
1− α2)
cos−1 α± cos−1 β = cos−1(αβ ∓
√(1− α2) (1− β2)
)tan−1 α± tan−1 β = tan−1
(α± β1∓ αβ
)
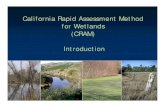
7 Relationships Between Sides andAngles
7.1 Law of Sines
a
sinα = b
sin β = c
sin γ
Extended Law of Sines
αβ
γ
c
ab
R
a
sinα = b
sin β = c
sin γ = 2R,
where R is the circumradius of the triangle.
7.2 Law of Cosines
cosα = b2 + c2 − a2
2bc ; a =√b2 + c2 − 2bc cosα
cosβ = a2 + c2 − b2
2ac ; b =√a2 + c2 − 2ac cosβ
cos γ = a2 + b2 − c2
2ab ; c =√a2 + b2 − 2ab cos γ
7.3 Law of Tangents
a− ba+ b
=tan 1
2 (α− β)tan 1
2 (α+ β)
b− cb+ c
=tan 1
2 (β − γ)tan 1
2 (β + γ)
c− ac+ a
=tan 1
2 (γ − α)tan 1
2 (γ + α)
7.4 Law of Cotangents
Let s be the semiperimeter, that is, s = a+b+c2 , and r be
the radius of the inscribed circle, then:
cot α2s− a
=cot β2s− b
=cot γ2s− c
= 1r
and furthermore that the inradius is given by:
r=√
(s− a)(s− b)(s− c)s
7.5 Mollweide’s Formula
Each of these identities uses all six parts of the triangle—thethree angles and the lengths of the three sides.
a+ b
c=
cos α−β2sin γ
2; a− b
c=
sin α−β2
cos γ2
7.6 Stewart’s Theorem
A
BC
c
a
b
D
d
n m
Let D be a point in BC of 4ABC. If |BD| = m, |CD| = n,and |AD| = d, then b2m+ c2n = a
(d2 +mn
).
7.7 Angles in Terms of Sides
Let s = a+b+c2 be the semiperimeter of the triangle, then:
α = sin−1(
2bc
√s (s− a) (s− b) (s− c)
)
β = sin−1(
2ac
√s (s− a) (s− b) (s− c)
)
γ = sin−1(
2ab
√s (s− a) (s− b) (s− c)
)
9

Trigonometry Cram Sheet alltootechnical.tk
8 Solving Triangles
A general form triangle has six main characteristics: threelinear (side lengths a, b, c) and three angular (α, β, γ). Theclassical plane trigonometry problem is to specify three ofthe six characteristics and determine the other three. A tri-angle can be uniquely determined in this sense when givenany of the following:
• Three sides (SSS)
• Two sides and the included angle (SAS)
• Two sides and an angle not included between them(SSA), if the side length adjacent to the angle isshorter than the other side length.
• A side and the two angles adjacent to it (ASA)
• A side, the angle opposite to it and an angle adjacentto it (AAS).
For all cases in the plane, at least one of the side lengthsmust be specified. If only the angles are given, the sidelengths cannot be determined, because any similar triangleis a solution.
Notes
• To find an unknown angle, the law of cosines is saferthan the law of sines. The reason is that the valueof sine for the angle of the triangle does not uniquelydetermine this angle. For example, if sin β = 0.5, theangle β can be equal either 30◦ or 150◦. Using thelaw of cosines avoids this problem: within the inter-val from 0◦ to 180◦ the cosine value unambiguouslydetermines its angle. On the other hand, if the an-gle is small (or close to 180◦), then it is more robustnumerically to determine it from its sine than its co-sine because the arc-cosine function has a divergentderivative at 1 (or −1).
• We assume that the relative position of specified char-acteristics is known. If not, the mirror reflection of thetriangle will also be a solution. For example, three sidelengths uniquely define either a triangle or its reflec-tion.
8.1 AAS/ASA Triangle
The known characteristics are the side c and the angles α, β.The third angle γ = 180◦ − α− β.Two unknown side can be calculated from the law of sines:
a = c sinαsin γ ; b = c sin β
sin γ .
The procedure for solving an AAS triangle is same as thatfor an ASA triangle: First, find the third angle by using theangle sum property of a triangle, then find the other twosides using the law of sines.
8.2 SAS Triangle
Here the lengths of sides a, b and the angle γ between thesesides are known. The third side can be determined from thelaw of cosines:
c =√a2 + b2 − 2ab cos γ
Now we use law of cosines to find the second angle:
α = cos−1 b2 + c2 − a2
2bc
Finally, β = 180◦ − α− γ.
8.3 SSS Triangle
Let three side lengths a, b, c be specified. To find the anglesα, β, the law of cosines can be used:
α = cos−1 b2 + c2 − a2
2bc ; β = cos−1 a2 + c2 − b2
2ac .
Then angle γ = 180◦ − α− β.
10

Trigonometry Cram Sheet alltootechnical.tk
8.4 SSA Triangle
This case is not solvable in all cases; a solution is guaranteedto be unique only if the side length adjacent to the angle isshorter than the other side length. Assume that two sidesb, c and the angle β are known. The equation for the angleγ can be implied from the law of sines:
sin γ = c sin βb
We denote further D = c sin βb (equation’s right side). There
are four possible cases:
1. If D > 1, no such triangle exists because the side bdoes not reach line BC. For the same reason a solu-tion does not exist if the angle β ≥ 90◦ and b ≤ c.
2. If D = 1, a unique solution exists: γ = 90◦, i.e., thetriangle is right-angled.
3. If D < 1, two alternatives are possible.
(a) If b < c, the angle γ may be acute: γ = sin−1 Dor obtuse: γ′ = 180◦ − γ. The picture aboveshows the point C, the side b and the angle γ asthe first solution, and the point C ′, side b′ andthe angle γ′ as the second solution.
(b) If b ≥ c then β ≥ γ (the larger side correspondsto a larger angle). Since no triangle can have twoobtuse angles, γ is acute angle and the solutionγ = sin−1 D is unique.
Once γ is obtained, the third angle α = 180◦ − β − γ .The third side can then be found from the law of sines:
a = b sinαsin β
8.5 Right Triangle
Solving right triangles is simply using the definitions of thetrigonometric functions and the Pythagorean theorem to de-termine the other parts. The right angle γ = 90◦ is alwaysassumed to be given.
9 Polar Coordinates
A point P can be located by rectangular coordinates (x, y)or polar coordinates (r, θ).The angle θ is a directed angle, that is, it is positive if itis measured counterclockwise from the initial side to theterminal side, and negative if it is measured clockwise.The value r is a directed distance, it is positive if the pointP lies on the terminal side of θ and negative if P is on theextension of the terminal side.
9.1 Properties
• Every ordered pair of polar coordinates (r, θ) locatesa unique point in the plane.
• However, a point P on the plane may be specified byan infinite number of ordered pairs (r, θ).
• The pole O may be specified by the ordered pair (0, θ)where θ ∈ R.
• Let P (r, θ) be a point in the polar plane. Then(r, θ + 2kπ) are also coordinates of the point P forany k ∈ Z.
• It can also be shown that ((−1)n r, θ + nπ) are alsocoordinates of P , where n ∈ Z.
9.2 Coordinate Transformation
Polar to Rectangular{x = r cos θy = r sin θ
Rectangular to Polar{r =
√x2 + y2
θ = tan−1 (y, x) ≈ tan−1 ( yx
)where tan−1 (y, x) is the two-argument form of the arctan-gent function (see section 3.9).
10 Special Polar Graphs
Theorem
A polar graph is:
1. symmetric with respect to the polar axis if anequivalent equation is obtained when (r, θ) is replacedby either (r,−θ) or (−r, π − θ).
2. symmetric with respect to the π2 -axis if an equiv-
alent equation is obtained when (r, θ) is replaced byeither (r, π − θ) or (−r,−θ).
11

Trigonometry Cram Sheet alltootechnical.tk
3. symmetric with respect to the pole if an equiv-alent equation is obtained when (r, θ) is replaced byeither (−r, θ) or (r, π + θ).
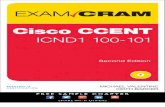
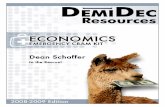
10.1 Limaçon of Pascal
A polar equation of the form r = a+b cos θ or r = a+b sin θhas a polar graph which is called a limaçon.Let OQ be a line joining origin O to any point in Q on acircle of diameter b passing through O. Then the curve isthe locus of all points in P such that |PQ| = a
Types of Limaçons
• Looped limaçon if 0 <∣∣ab
∣∣ < 1
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 2 4 6
• Cardioid if∣∣ab
∣∣ = 1
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3 4
• Dimpled limaçon if 1 <∣∣ab
∣∣ < 2
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 2 4
• Convex limaçon if∣∣ab
∣∣ ≥ 2
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 2 4 6
Symmetry and Direction
For a > 0 and b > 0:
symmetry points to the
r = a+ b cos θ polar axis right
r = a− b cos θ polar axis left
r = a+ b sin θ π2 -axis top
r = a− b sin θ π2 -axis bottom
12

Trigonometry Cram Sheet alltootechnical.tk
10.2 Rose
A rose with n leaves has a polar equation r = a cos (nθ) orr = a sin (nθ) where a is a constant and n is an odd integer.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 2 4
For an even integer n, the polar graph of an equationr = a cos (nθ) or r = a sin (nθ) is a rose with 2n leaves.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 0.5 1 1.5 2
Properties
• The length of one leaf in the polar graph of a rose is|a|.
• If n is odd, then the graph of the polar equationr = a cos (nθ) is symmetric with respect to the po-lar axis.
• If n is odd, then the graph of the polar equationr = a sin (nθ) is symmetric with respect to the π
2 -axis.
• A rose with an even number of leaves is symmetricwith respect to the polar axis, the π
2 -axis, and thepole.
10.3 Spiral of Archimedes
The polar graph of a polar equation r = aθ where θ > 0and a ∈ R is called a spiral.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 2 4 6
10.4 Lemniscate of Bernoulli
A polar equation r2 = a cos 2θ or r2 = a sin 2θ has a polargraph that is called a lemniscate.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3 4
13

Trigonometry Cram Sheet alltootechnical.tk
10.5 Folium of Descartes
A folium is a plane curve proposed by Descartes to chal-lenge Fermat’s extremum-finding techniques. It has a polarequation r = 3a sec θ tan θ
1+tan3 θ .
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3 4
10.6 Spiral of Fermat
The Fermat’s spiral, also known as the parabolic spiral, hasa polar equation r2 = a2θ. The resulting spiral is symmetricwith respect to the origin.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2
10.7 Cissoid of Diocles
Given an origin O and a point P on the curve, let S be thepoint where the extension of the line OP intersects the linex = 2a and R be the intersection of the circle of radius a
and center (a, 0) with the extension of OP . Then the cis-soid of Diocles is the curve which satisfies OP = RS. It hasa polar equation r = 2a sin θ tan θ.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 2 4
10.8 Epispiral
The epispiral is a plane curve with a polar equation r =a sec (nθ). Then there are n sections if n is odd (in blue), or2n sections if n is even (in red). A slightly more symmetricversion considers instead r = a |sec (nθ)|.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 2 4 6
14

Trigonometry Cram Sheet alltootechnical.tk
10.9 Lituus
The lituus is the locus of the point P moving such thatthe area of a circular sector remains constant. It means a“crook,” in the sense of a bishop’s crosier. It has a polarequation r2θ = a2.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 0.5 1 1.5 2
10.10 Eight Curve
The eight curve, also known as the lemniscate of Gerono,is given by the polar equation r2 = a2 sec4 θ cos (2θ). Ithas vertical tangents (±a, 0) and horizontal tangents at(±√
22 a,±
12a).
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3 4
10.11 Butterfly Curve
The butterfly curve is a transcendental plane curve discov-ered by Temple H. Fay. The curve is given by the polarequation r = esin θ − 2 cos 4θ + sin5 ( 1
24 (2θ − π)).
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3 4
10.12 Strophoid
Let C be a curve, let O be a fixed point (the pole), and letO′ be a second fixed point. Let P and P ′ be points on a linethrough O meeting C at Q such that P ′Q = QP = QO′.The locus of P and P ′ is called the strophoid of C withrespect to the pole O and fixed point O′. Its polar equationis r = b sin(a−2θ)
sin(a−θ) .
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 5 10
15

Trigonometry Cram Sheet alltootechnical.tk
10.13 Cochleoid
A cochleoid is a snail-shaped curve similar to a strophoidwhich can be represented by the polar equation r = a sin θ
θ .
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3
10.14 Cycloid of Ceva
The cycloid of Ceva is a polar curve that can be used forangle trisection. It has the polar equation r = 1 + 2 cos 2θ.
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3
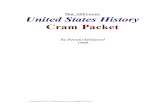
10.15 Freeth’s Nephroid
It is a strophoid of a circle with the pole O at the center ofthe circle and the fixed point P on the circumference of thecircle. It has a polar equation r = a
(1 + 2 sin θ
2).
π6
π3
π22π
3
5π6
π
7π6
4π3 3π
2
5π3
11π6
0 1 2 3
16

Trigonometry Cram Sheet alltootechnical.tk
11 Miscellaneous Stuff
11.1 Pythagorean Triples
A Pythagorean triple (a, b, c) is a triple of positive inte-gers such that a2 + b2 = c2 . It is primitive if the great-est common divisor of a, b, and c is 1. For any primi-tive Pythagorean triple, either m or n is even, but notboth (i.e. m 6≡ n mod 2). When that is done, then ev-ery primitive Pythagorean triple (a, b, c) is of the form(a, b, c) =
(m2 − n2, 2mn,m2 + n2) where m and n are rel-
atively prime (i.e. gcd (m,n) = 1) and 1 ≤ n < m.m n a b c2 1 3 4 53 2 5 12 134 1 15 8 174 3 7 24 255 2 21 20 295 4 9 40 416 1 35 12 376 3 27 36 456 5 11 60 617 2 45 28 537 4 33 56 657 6 13 84 858 1 63 16 658 3 55 48 738 5 39 80 898 7 15 112 1139 2 77 36 859 4 65 72 979 6 45 108 1179 8 17 144 14510 1 99 20 10110 3 91 60 10910 5 75 100 12510 7 51 140 14910 9 19 180 18111 2 117 44 12511 4 105 88 13711 6 85 132 157
m n a b c11 8 57 176 18511 10 21 220 22112 1 143 24 14512 3 135 72 15312 5 119 120 16912 7 95 168 19312 9 63 216 22512 11 23 264 26513 2 165 52 17313 4 153 104 18513 6 133 156 20513 8 105 208 23313 10 69 260 26913 12 25 312 31314 1 195 28 19714 3 187 84 20514 5 171 140 22114 7 147 196 24514 9 115 252 27714 11 75 308 31714 13 27 364 36515 2 221 60 22915 4 209 120 24115 6 189 180 26115 8 161 240 28915 10 125 300 32515 12 81 360 36915 14 29 420 421
11.2 Triangle Centers
Centroid
The geometric centroid (center of mass) of the polygon ver-tices of a triangle is the point G which is also the intersec-tion of the triangle’s three triangle medians. The point istherefore sometimes called the median point. The centroidis always in the interior of the triangle.For a triangle with Cartesian vertices (x1, y1), (x2, y2),(x3, y3), the Cartesian coordinates of the centroid are givenby:
G (x0, y0) =(x1 + x2 + x3
3 ,y1 + y2 + y3
3
)
Incenter
The incenter I is the center of the incircle for a triangle.The corresponding radius of the incircle is known as theinradius.The incenter can be constructed as the intersection of anglebisectors. It is also the interior point for which distances tothe sides of the triangle are equal.For a triangle with Cartesian vertices (x1, y1), (x2, y2),(x3, y3), the Cartesian coordinates of the incenter are givenby:
I (x0, y0) =(ax1 + bx2 + cx3
a+ b+ c,ay1 + by2 + cy3
a+ b+ c
)
Orthocenter
The intersection H of the three altitudes AHA, BHB , andCHC of a triangle is called the orthocenter.For a triangle with Cartesian vertices (x1, y1), (x2, y2),(x3, y3), the Cartesian coordinates of the circumcenter aregiven by:
H (x0, y0) =(x1tA + x2tB + x3tC
tA + tB + tC,y1tA + y2tB + y3tC
tA + tB + tC
)where tA, tB , tC is equal to tanA, tanB, tanC respectively.
Circumcenter
The circumcenter is the center O of a triangle’s circumcir-cle. It can be found as the intersection of the perpendicularbisectors.For a triangle with Cartesian vertices (x1, y1), (x2, y2),(x3, y3), the Cartesian coordinates of the circumcenter aregiven by:
O (x0, y0) = (Ox, Oy)
where Ox = (y2−y3)(x21+(y1−y2)(y1−y3))+x2
2(y3−y1)+x23(y1−y2)
2(x1(y2−y3)+x2(y3−y1)+x3(y1−y2))
and Oy = 2(x2−x3)(−x21+x2
3−y21+y2
3)+2(x1−x3)(x22−x
23+y2
2−y23)
4(x1(y2−y3)+x2(y3−y1)+x3(y1−y2)) .
Excenter
An excenter, denoted Ji, is the center of an excircle of atriangle. An excircle is a circle tangent to the extensions oftwo sides and the third side. It is also known as an escribedcircle.
17

Trigonometry Cram Sheet alltootechnical.tk
11.3 Area of the Triangle
Base and Altitude
A4 = 12bh
where b is the base and h is the altitude.
SAS Triangle
A4 = 12ab sin γ = 1
2bc sinα = 12ac sin β
SSS Triangle
Given three sides a, b, and c, the area of the triangle can bedetermined by Heron’s formula:
A4 =√s (s− a) (s− b) (s− c)
= 14√
4a2b2 − (a2 + b2 − c2)2
where s = a+b+c2 is the semiperimeter. The area can also
be determined by:
A4 = abc
4Rwhere R is the circumradius.
AAS Triangle
A4 = a2 sin β sin γ2 sinα = b2 sinα sin γ
2 sin β = c2 sinα sin β2 sin γ
where the missing angle can be easily determined throughα+ β + γ = 180◦.
ASA Triangle
A4 = a2
2 (cotβ + cot γ) = b2
2 (cotα+ cot γ) = c2
2 (cotα+ cotβ)
Three Vertices
Given the vertices of the triangle (xi, yi) ∀i ∈ {1, 2, 3}, theshoelace formula can be applied for n = 3 as follows:
A4 = 12
∣∣∣∣∣2∑i=1
xiyi+1 + x3y1 −2∑i=1
xi+1yi − x1y3
∣∣∣∣∣= 1
2 |x1y2 + x2y3 + x3y1 − x2y1 − x3y2 − x1y3|
However, if one of the vertices is at the origin, then the areaof the triangle can be simplified:
A4 = 12
∥∥∥∥ x2 x3y2 y3
∥∥∥∥ = 12 |x2y3 − x3y2|
where ‖·‖ denotes the absolute value of the determinant.
Equilateral Triangle
A4 =√
34 a2
Isosceles Triangle
These are special cases of the formulas given above.
A4 = b
4√
4a2 − b2 = 12a
2 sin θ
Pick’s Theorem
A4 = I + 12B − 1
where I is the number of internal lattice points and B is thenumber of lattice points lying on the border of the triangle.
11.4 Other Coordinate Systems
Let a, b, c denote the side length and A,B,C denote theangles at the respective vertices.
Barycentric Coordinates
centroid G 1 : 1 : 1orthocenter H tanA : tanB : tanCincenter I sinA : sinB : sinC
circumcenter O sin 2A : sin 2B : sin 2Cexcenters Ja, Jb, Jc {−a : b : c, a : −b : c, a : b : −c}
Trilinear Coordinates
centroid G cscA : cscB : cscCorthocenter H secA : secB : secCincenter I 1 : 1 : 1
circumcenter O cosA : cosB : cosCexcenters Ja, Jb, Jc {−1 : 1 : 1, 1 : −1 : 1, 1 : 1 : −1}
18