Transient thermal-fluid flow characteristics of vascular networks
8
Transient thermal-fluid flow characteristics of vascular networks Kee-Hyeon Cho a,⇑ , Moo-Hwan Kim b a Energy & Resources Research Department, Research Institute of Industrial Science & Technology (RIST), San 32, Hyoja-dong, Namgu, Pohang, Kyungbuk 790-330, Republic of Korea b Department of Mechanical Engineering, Pohang University of Science and Technology (POSTECH), San 31, Hyoja-dong, Namgu, Pohang, Kyungbuk 790-784, Republic of Korea article info Article history: Received 5 October 2011 Received in revised form 24 February 2012 Accepted 27 February 2012 Available online 14 April 2012 Keywords: Transient response Optimization Constructal Vascular Smart structures abstract Here we develop new vascular designs for the volumetric bathing of smart structures under time-varying conditions. The three flow configurations described in this paper are the first, second, and third construc- tal structures with optimized hydraulic diameters (D 1 and D 2 ) and non-optimized hydraulic diameter (D) for one system size, 20 20. The main objective was to determine the longest permissible time delay so that the maximum temperatures do not exceed the maximum allowable limit. It is the best to cool with the first construct in the optimized constructal configurations when pressure drop number (Be) is lower than 1 10 11 and the best structure is the second constructal structure when pressure drop number (Be) is greater than 2 10 11 , whereas the best structure in the non-optimized constructal configurations is the third construct. It is also shown that the most attractive configurations have larger allowable delay times: in both the optimized and non-optimized constructal structures, the best configuration is the second con- struct where the pressure drop is fixed at about 1 kPa. Ó 2012 Elsevier Ltd. All rights reserved. 1. Introduction Much effort has been directed the development of optimization technology in multi-scale flow architectures. The use of tree- shaped architectures with greater volumetric densities of heat transfer, mass transfer and chemical reaction rates is an important movement toward compact flow structures. Tree-shaped flow architectures are derived from the constructal law as flow struc- tures that connect one point (source, or sink) and an infinite num- ber of points (curves, areas, or volumes). Constructal law focuses on the relationship between the architecture of the flow system and its global performance [1]. The constructal law and the use of tree architectures were originally proposed as a problem of pure heat conduction, and later were extended to structures for convec- tive fins, fluid flow, and heat transfer [2]. Kim et al. [3], Wang et al. [4], Lee et al. [5], and Cho et al. [1] illustrated how this methodology can be used to develop vascular structures for self-healing materials, widely encountered in natural systems, to inspire the design of systems. Biomimetic also used in self-healing systems for polymer composites [6–8]. In those systems, a continuous supply of healing agents throughout the vol- ume of the self-healing material requires the vascularization of the entire volume, so that the structural composite is immune to volumetric cracking. The vasculature is more effective when it delivers the fluid faster and more uniformly regardless of the (random) position of the crack site [1]. However, most of the constructal design or the optimization study in multi-scale flow architectures that has been done so far is mainly for steady-state thermal and fluid flow. Cho et al. [9] investigated the fluid mechanics and thermal performance of the same configurations with constructal architectures explored in the previous work [1], under steady-state conditions. Kim et al. [10] studied the time-dependent behavior of a different configura- tion, not the same vascular designs considered in the present study. Thus, this paper proposes new vascular designs for the volumetric bathing of the smart structures under time-varying conditions, by considering the fundamental problem in the three- dimensions (Fig. 1). At the time t =0 + , heat is generated uniformly over the area at the rate q’’. The coolant starts flowing at t = t d , and sweeps the area from side to side. For volumes that must be bathed uniformly by a single stream flowing in and out, the recommended dendritic flow architecture consists of two trees matched canopy- to-canopy [11], shown in Fig. 1(a). Additional classes of multi-scale trees matched canopy to canopy are shown in Fig. 1(b) and (c). The second construct in Fig. 1(b) has blocks of parallel channels serving as canopies for two matched trees, and the third construct in Fig. 1(c) has four blocks of parallel channels. This higher-order con- struct has greater complexity. Here we focus on the transient response of a vascularized cooling body subjected to sudden heating and fluid flow. The results of this study are helpful for the design and optimization of vascular networks. 2. Geometry and numerical model 2.1. Geometry Consider the vascularized cooling body consisting of a square slab measuring X Y and having thickness W, where W is the 0017-9310/$ - see front matter Ó 2012 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.ijheatmasstransfer.2012.02.075 ⇑ Corresponding author. Tel.: +82 54 279 5267; fax: +82 54 279 6309. E-mail address: [email protected] (K.-H. Cho). International Journal of Heat and Mass Transfer 55 (2012) 3533–3540 Contents lists available at SciVerse ScienceDirect International Journal of Heat and Mass Transfer journal homepage: www.elsevier.com/locate/ijhmt
-
Upload
kee-hyeon-cho -
Category
Documents
-
view
214 -
download
0
Transcript of Transient thermal-fluid flow characteristics of vascular networks

International Journal of Heat and Mass Transfer 55 (2012) 3533–3540
Contents lists available at SciVerse ScienceDirect
International Journal of Heat and Mass Transfer
journal homepage: www.elsevier .com/locate / i jhmt
Transient thermal-fluid flow characteristics of vascular networks
Kee-Hyeon Cho a,⇑, Moo-Hwan Kim b
a Energy & Resources Research Department, Research Institute of Industrial Science & Technology (RIST), San 32, Hyoja-dong, Namgu, Pohang, Kyungbuk 790-330, Republic of Koreab Department of Mechanical Engineering, Pohang University of Science and Technology (POSTECH), San 31, Hyoja-dong, Namgu, Pohang, Kyungbuk 790-784, Republic of Korea
a r t i c l e i n f o a b s t r a c t
Article history:Received 5 October 2011Received in revised form 24 February 2012Accepted 27 February 2012Available online 14 April 2012
Keywords:Transient responseOptimizationConstructalVascularSmart structures
0017-9310/$ - see front matter � 2012 Elsevier Ltd. Ahttp://dx.doi.org/10.1016/j.ijheatmasstransfer.2012.02
⇑ Corresponding author. Tel.: +82 54 279 5267; faxE-mail address: [email protected] (K.-H. Cho).
Here we develop new vascular designs for the volumetric bathing of smart structures under time-varyingconditions. The three flow configurations described in this paper are the first, second, and third construc-tal structures with optimized hydraulic diameters (D1 and D2) and non-optimized hydraulic diameter (D)for one system size, 20 � 20. The main objective was to determine the longest permissible time delay sothat the maximum temperatures do not exceed the maximum allowable limit. It is the best to cool withthe first construct in the optimized constructal configurations when pressure drop number (Be) is lowerthan 1 � 1011 and the best structure is the second constructal structure when pressure drop number (Be)is greater than 2 � 1011, whereas the best structure in the non-optimized constructal configurations is thethird construct. It is also shown that the most attractive configurations have larger allowable delay times:in both the optimized and non-optimized constructal structures, the best configuration is the second con-struct where the pressure drop is fixed at about 1 kPa.
� 2012 Elsevier Ltd. All rights reserved.
1. Introduction is mainly for steady-state thermal and fluid flow. Cho et al. [9]
Much effort has been directed the development of optimizationtechnology in multi-scale flow architectures. The use of tree-shaped architectures with greater volumetric densities of heattransfer, mass transfer and chemical reaction rates is an importantmovement toward compact flow structures. Tree-shaped flowarchitectures are derived from the constructal law as flow struc-tures that connect one point (source, or sink) and an infinite num-ber of points (curves, areas, or volumes). Constructal law focuseson the relationship between the architecture of the flow systemand its global performance [1]. The constructal law and the useof tree architectures were originally proposed as a problem of pureheat conduction, and later were extended to structures for convec-tive fins, fluid flow, and heat transfer [2].
Kim et al. [3], Wang et al. [4], Lee et al. [5], and Cho et al. [1]illustrated how this methodology can be used to develop vascularstructures for self-healing materials, widely encountered in naturalsystems, to inspire the design of systems. Biomimetic also used inself-healing systems for polymer composites [6–8]. In thosesystems, a continuous supply of healing agents throughout the vol-ume of the self-healing material requires the vascularization of theentire volume, so that the structural composite is immune tovolumetric cracking. The vasculature is more effective when itdelivers the fluid faster and more uniformly regardless of the(random) position of the crack site [1].
However, most of the constructal design or the optimizationstudy in multi-scale flow architectures that has been done so far
ll rights reserved..075
: +82 54 279 6309.
investigated the fluid mechanics and thermal performance of thesame configurations with constructal architectures explored inthe previous work [1], under steady-state conditions. Kim et al.[10] studied the time-dependent behavior of a different configura-tion, not the same vascular designs considered in the presentstudy. Thus, this paper proposes new vascular designs for thevolumetric bathing of the smart structures under time-varyingconditions, by considering the fundamental problem in the three-dimensions (Fig. 1). At the time t = 0+, heat is generated uniformlyover the area at the rate q’’. The coolant starts flowing at t = td, andsweeps the area from side to side. For volumes that must be batheduniformly by a single stream flowing in and out, the recommendeddendritic flow architecture consists of two trees matched canopy-to-canopy [11], shown in Fig. 1(a). Additional classes of multi-scaletrees matched canopy to canopy are shown in Fig. 1(b) and (c). Thesecond construct in Fig. 1(b) has blocks of parallel channels servingas canopies for two matched trees, and the third construct inFig. 1(c) has four blocks of parallel channels. This higher-order con-struct has greater complexity. Here we focus on the transientresponse of a vascularized cooling body subjected to suddenheating and fluid flow. The results of this study are helpful forthe design and optimization of vascular networks.
2. Geometry and numerical model
2.1. Geometry
Consider the vascularized cooling body consisting of a squareslab measuring X � Y and having thickness W, where W is the

Nomenclature
A area (m2)Be pressure drop number (Eq. (23))cp specific heat (J kg�1 K�1)d elemental length scale (m)Di channel diameter (m)D1 hydraulic diameter of thin channels (m)D2 hydraulic diameter of thick channels (m)k thermal conductivity (W m�1 K�1)~k ratio of thermal conductivities (Eq. (22))Li channel length (m)_m mass flow rate (kg s�1)
n normal directionN number of elemental sequences d � d in one directionP local pressure (Pa)Pin inlet pressure (Pa)Pout outlet pressure (Pa)Pr Prandtl number (Eq. (22))q00 bottom and top heat flux (W m�2)R overall thermal resistance (Eq. (25))~R dimensionless thermal resistance based on total volume
(Eq. (27))Re Reynolds number (Eq. (24))Sv svelteness number (Eq. (2))T local temperature (K)t time (s)tc thermal inertia time (s), (Eqs. (29) and (30))tss characteristics response time (s), (Eq. (29))Tin inlet temperature (K)Tmax maximum temperature (K)Tmin minimum temperature (K)u, v, w velocity components in x, y, and z directions (ms�1)
V total volume (m3)Vc total channel flow volume (m3)x, y, z Cartesian coordinates (m)X, Y, W dimensions of vascularized unit (m), (Fig. 1)
Greek symbolsDP pressure difference (Pa)m kinematic viscosity (m2 s�1)q density (kg m�3)u porosity (Eq. (1))lf fluid dynamic viscosity (kg s�1 m)af fluid thermal diffusivity (m2 s�1)s time delay (Eq. (30))
Subscriptsc criticalf fluidi channel rankin inletmax maximummin minimumopt optimumout outlets solidss steady state
Superscript� dimensionless
3534 K.-H. Cho, M.-H. Kim / International Journal of Heat and Mass Transfer 55 (2012) 3533–3540
dimension of the solid body in the direction perpendicular to theplane X � Y, as shown in Fig. 1. The size of the square domain ismeasured in terms of N � N, where N is the number of small squareelements counted along one side, 20, in the present study.
The path to higher performance involves increasing the freedomto morph the flow architecture [11]. This entails adding morelength scales that can be varied, in this case two diameter sizes in-stead of one. The ratio of diameters D1/D2 is the additional degreeof freedom. Optimized multiple scales D1 and D2 will be distributednon-uniformly through the available flow volume. We built thefirst, second, and third constructs with two diameter sizes on asquare domain with 20 � 20 elements from our earlier work [1].According to constructal theory [11–13], the thinner channels(D1) should be placed in the canopy, and the thicker (D2) in the
(a) (b)
Fig. 1. Schematic diagram of the three-dimensional geometry of cooling plates with tconstruct, (c) third construct.
stem and main branches (see Fig. 1). The elemental length is d,which means the pitch between two successive thin channels inthe present study, as illustrated in Fig. 1. The shape of the channelcross section is assumed to be fixed from one channel to the next.Note that the effect of local pressure losses can be reduced furtherby smoothing the transitions between subsequent channels of dif-ferent sizes, but they are perpendicular at a channel intersectionwhile maintaining the original cross-section of subsequent chan-nels for simplicity.
We also define the corresponding non-optimized configura-tions, where channels have only one size, on a square domain com-posed of 20 � 20 elements. There is one channel size D, with thechannel volume Vc fixed on the same basis as the results of theoptimized configurations. The vascular designs described in this
(c)
ree-shaped cooling channel with 20 � 20 elements: (a) first construct, (b) second

K.-H. Cho, M.-H. Kim / International Journal of Heat and Mass Transfer 55 (2012) 3533–3540 3535
paper were optimized with respect to a minimal pressure drop byusing the methodology explored in previous research [1]. Thedetailed geometrical dimensions for each configuration aresummarized in Table 1.
The volume fraction occupied by all channels is held constant:
u ¼ total channel volumetotal volume
¼ V c
Vð1Þ
where the element volume is V = XYW. The void fraction u may beviewed on the average porosity of the whole structure, with theobservation that in these designs the channel volume is not distrib-uted uniformly. Another geometric property of the flow structure isthe svelteness Sv, which is the ratio of the external length scale((XY)1/2) divided by the internal length scale:
Sv ¼ external length scaleinternal length scale
¼ ðXYÞ1=2
V1=3c
ð2Þ
Sv is a global property of the flow architecture, playing an importantrole in the evolution of the flow architecture toward the best ornear-best architecture in a fixed space (near the ‘‘equilibrium flowconfiguration’’ performance level [11]).
2.2. Numerical model
The frame (x,y,z) is aligned with the (X,Y,Z) directions as shownin Fig. 1. Cooling is provided by an embedded three-dimensionalchannel network. Coolant is pumped into the cooling plate with aspecified pressure at the inlet. This pressure must be high enoughto overcome the pressure losses when the cooling plate is underoperation. The porosity u is fixed at 0.02 for all configurations.The boundary conditions are applied, as shown in Fig. 2. The chan-nel surfaces are impermeable with no slip. The bottom and top sur-faces are subjected to constant heat flux, q00 = 500 W/m2. The othersurfaces are adiabatic, as shown in Fig. 2. The numerical work cov-ers the overall pressure drop range DP ffi 100�104 Pa, which corre-sponds to the mass flow rate range 4.2 � 10�5 � 1.2 � 10�3 kg/s.The inlet temperature Tin is fixed at 291 K. It is assumed that thefluid is incompressible and Newtonian, gravity effects are negligible
Table 1Geometric dimensions for the constructal configurations.
Complexity V (mm3) Vc (mm3) d (mm)
1st 50,000 1000 52nd 50,000 1000 53rd 50,000 1000 5
Fig. 2. Schematic diagram of computational domain with bou
in the momentum equations, and the flow is laminar and singlephase. For the sake of simplicity, the properties are assumed to beconstant functions of temperature because these assumptions al-low easier derivation of the dimensionless governing equationsand the dimensionless parameters. This also offers simple relationsamong the process parameters that give a better insight on the phe-nomena involved, although they may have a significant effect onquantitative aspects of the results under certain circumstances.The material properties of water as a working fluid are asfollows: density q = 998.2 kg/m3, specific heat cp = 4175.0 J/kg K,thermal conductivity k = 0.605 W/m K, and dynamic viscosityl = 8.51 � 10�5 kg/m s. The material properties of a solid plate areas follows: q = 8030.0 kg/m3, cp = 461.1 J/kg K, and k = 15.5891 W/m K. These material properties are evaluated at a fixed referencetemperature of 300 K, which is higher than the inlet temperature(291 K) and lower than the outlet temperature, because the averagetemperatures for each case are different from each other.
Based on the above assumptions, the governing equations formass, momentum, and energy are solved numerically in the solidand fluid domains of the cooling plate, as follows:
(1) Mass conservation:
D
0.70.70.7
ndary co
ouoxþ ov
oyþ ow
oz¼ 0 ð3Þ
(2) Momentum equation:
qouotþ u
ouoxþ v ou
oyþw
ouoz
� �¼ � op
oxþ lr2u ð4Þ
qovotþ u
ovoxþ v ov
oyþw
ovoz
� �¼ � op
oyþ lr2v ð5Þ
qowotþ u
owoxþ v ow
oyþw
owoz
� �¼ � op
ozþ lr2w ð6Þ
where r2 ¼ o2=ox2 þ o2=oy2 þ o2=oz2.
(D1 = D2) D2 (mm) D1 (mm) Sv
80 1.500 0.663 10.064 1.282 0.537 10.082 1.160 0.531 10.0
nditions (first construct with 20 � 20 elements).

3536 K.-H. Cho, M.-H. Kim / International Journal of Heat and Mass Transfer 55 (2012) 3533–3540
(3) Energy equation:
– Energy in the fluid domain:ðqCpÞfoTotþ u
oToxþ v oT
oyþw
oToz
� �¼ kfr2T ð7Þ
– Energy in the solid domain:
ðqCpÞsoTot¼ ksr2T ð8Þ
The constant heat flux imposed on the upper and lower X � Yplanes is:
q00 ¼ �ksoToz
ð9Þ
where ks is the thermal conductivity of the solid. The continuity ofthe temperature and heat flux at the interface between the solidand fluid require:
Tjs ¼ Tjf ð10Þ
ksoTon
����s¼ kf
oTon
����f
ð11Þ
where kf is the fluid thermal conductivity and n is the vector normalto the surface.
Velocity components in the x, y, and z directions in the coordi-nate system were designated by u, v, and w, respectively. The vari-ables are defined in the Nomenclature. The numerical work ofsolving Eqs. (3)–(11) was based on a dimensionless formulationusing the variables:
~x ¼ xL; ~y ¼ y
L; ~z ¼ z
L; ~n ¼ n
L; ð12Þ
~u ¼ uLaf; ~v ¼ v L
af; ~w ¼ w
Laf; ð13Þ
~P ¼ P � Poutð ÞL2
laf; ~T ¼ T � T inð Þkf
q00L; ~t ¼ taf
L2 ð14Þ
where L is a reference length (L = X = Y = 0.1 m) and ~u; ~v , and ~w arethe velocity components in the ~x; ~y;~z directions, whileDP = Pin � Pout.
The resulting dimensionless equations include:
o~uo~xþ o~v
o~yþ o~w
o~z¼ 0 ð15Þ
1Pr
o~uo~tþ ~u
o~uo~xþ ~v o~u
o~yþ ~w
o~uo~z
� �¼ � o~p
o~xþr2~u ð16Þ
1Pr
o~vo~tþ ~u
o~vo~xþ ~v o~v
o~yþ ~w
o~vo~z
� �¼ � o~p
o~yþr2 ~v ð17Þ
1Pr
o ~wo~tþ ~u
o ~wo~xþ ~v o~w
o~yþ ~w
o ~wo~z
� �¼ � o~p
o~zþr2 ~w ð18Þ
o~To~tþ ~u
o~To~xþ ~v o~T
o~yþ ~w
o~To~z¼ r2 ~T ð19Þ
o~To~t¼ ~ar2~T ð20Þ
1 ¼ �~koToz; ~k
o~To~n
�����s
¼ o~To~n
�����f
ð21Þ
where the dimensionless groups are
Pr ¼ maf; ~a ¼ as
af; ~k ¼ ks
kfð22Þ
The dimensionless pressure drop number (Be) is defined by
Be ¼ DPL2
lfafð23Þ
where af and lf are the thermal diffusivity and viscosity of workingfluid, respectively. The dimensionless pressure drop number (Be)that Bhattacharjee and Grosshandler [14] and Petrescu [15] termedthe Bejan number is clearly a measure of the relative magnitude ofthe heat transfer and fluid friction irreversibility. The pressure dropnumber plays the same role in forced convection that the Rayleighnumber plays in natural convection. When one fixes DP, then Be isfixed [9]. The overall pressure drop across the cooling plates is de-fined as DP = Pin � Pout, where Pin and Pout are the inlet and outletpressures, respectively. The lowest pressure (Pout = 0) is maintainedas constant and uniform at the single outlet channel. The resultingpressure drops across the cooling channels were such that theReynolds number based on the inlet channel diameter was in therange of 70–1500.
2.3. Numerical method and grid independence
Computations were performed using a finite-volume packagewith pressure-based segregated solver and node-based gradientevaluation [16]. As for the coupling of velocity and the pressurein the momentum equation, the Semi-Implicit Method for PressureLinked Equation (SIMPLE) algorithm [17] is used. The standardscheme was used for pressure discretization. The second order up-wind scheme [16], which is one of the more popular numericalschemes because of its combination of accuracy and stability, isused to solve the combined convection–diffusion effect in the gov-erning equations, and first-order implicit scheme for unsteady for-mulation. Under-relaxation was used for the pressure, momentum,and energy equations to provide stable convergence.
In grid generation, structured hexahedral grids are adopted. Theindependence of the solution with respect to the grid size waschecked by examining the values of the mass flow rate, maximumtemperature, temperature differences between the inlet and outlet,convective heat transfer coefficient between the channel walls andthe fluid, and the time to reach the steady state temperature foreach geometrical configuration. The number of cells varied fromcase to case; for example, the smallest number was 3 � 106 forthe optimized first construct.
Convergence is achieved when the residuals for the mass andmomentum equation are smaller than 10�4, and the residual ofthe energy equation is less than 10�11. In addition, we examinedclosely the difference between the incoming and outgoing massflow rates and the sensible heat balance, which is the differencebetween the incoming and outgoing enthalpies. For all of the casessimulated in this study, the relative difference was kept within0.01%. The time step criteria for steady-state is selected based onthe criterion e = (Ti � Ti�1)/Ti 6 0.0001, where Ti is the highest tem-perature computed for the ith step.
3. Results and discussion
Numerical simulations were conducted to study the steady andtransient behavior of the constructal channel architectures duringthe startup period and a time delay before the coolants startsflowing with the dimensionless pressure drop parametersBe ffi 8.0 � 109 � 7.2 � 1011, Pr = 5.87 and ~k ¼ 25:8. These dimen-sionless groups represent a physical system that consists of AISI304 steel as solid and water as fluid.
3.1. Steady conjugate heat transfer
The Reynolds number based on the inlet hydraulic diameter(Din) and the local mean velocity at the inlet (U) is defined as:
Re ¼ qUDin
lð24Þ

Fig. 4. Global thermal resistance vs. pressure drop number (Be) under steady-statecondition in the structure of Fig. 1.
K.-H. Cho, M.-H. Kim / International Journal of Heat and Mass Transfer 55 (2012) 3533–3540 3537
The effectiveness of cooling plates is decided by how well the fluidflow depresses the peaks of the highest temperature (hot spot,Tmax). The overall temperature difference across the XYW volumeis (Tmax � Tmin), where Tmin is the inlet temperature of the coolant.The overall thermal resistance is expressed as:
R ¼ Tmax � Tmin
qð25Þ
where q is the total heat imposed on the cooling plate. The globalthermal resistance is non-dimensionalized as:
~Rmax ¼Tmax � Tmin
2q00Y2=ðksWÞð26Þ
The corresponding dimensionless thermal resistance distribution isrepresented by
~R ¼ T � Tmin
2q00Y2=ðksWÞð27Þ
where T(x, y, z) is a local temperature in the cooling plate. R andRmax may also be considered as non-dimensional temperatures.
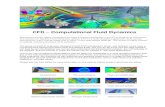
Fig. 3 shows the steady-state non-dimensional temperature dis-tribution on the mid-plane of the cooling plates along the z-axis asthe pressure drop (DP) increases. The steady-state maximumdimensionless temperature (~Rmax ;ss) for optimized channels(D1 – D2) (Fig. 3(b)) is much lower than for non-optimized chan-nels (D1 = D2) (Fig. 3(e)) at the same conditions, DP ffi 300 Pa. Thetemperature distribution is also different, i.e., the non-optimizedconfigurations have clear and intensive hot spots near the uppercentral area, resembling a reverse triangle shape where hot spotsof the cooling plate are formed (Fig. 3(g)–(h)), as reported in Choet al. [9].
Fig. 4 is a summary of how the steady-state non-dimensionaltemperature distribution (~Rmax ;ss) depends on Be. The cooling per-formance improves (i.e., ~Rmax ;ss decreases) as the applied pressuredrop (DP) increases. Here, increasing the overall pressure drop
Outlet
Inlet
Outlet
Inlet I
(b)(a)Outlet
Inlet
Outlet
Inlet
(e) (f)
xy
Fig. 3. Steady-state dimensionless temperature distributions (~R) for the first construct w(c) D1 – D2, DP ffi 1 kPa; (d) D1 – D2, DP ffi 3 kPa; (e) D1 = D2, DP ffi 300 Pa; (f) D1 = D2, D
(DP) increases the overall flow-rate. It is also found that the coolingenhancement depends greatly on the channel configurations. Forexample, it is the best to cool with the third construct among thenon-optimized channel architecture, whereas performances ofthe first and second constructs among the optimized configura-tions are competitive across all working conditions. The secondconstruct is superior to that of the first constructal structures whenBe is greater than 2 � 1011.
3.2. Transient conjugate heat transfer
Initially the cooling plate has a uniform temperature Tmin and atthe time t = 0+ the top and bottom surface are suddenly exposed to auniform heat flux (q00 = 500 W/m2), which is constant and
Outlet
nlet
Outlet
Inlet(c) (d)
Outlet
Inlet
Outlet
Inlet
(g) (h)
ith 20 � 20 elements (Sv = 10.0): (a) D1 – D2, DP ffi 100 Pa; (b) D1 – D2, DP ffi 300 Pa;P ffi 1 kPa; (g) D1 = D2, DP ffi 3 kPa; (h) D1 = D2, DP ffi 10 kPa.

Fig. 7. The definition of the thermal inertia time (~tc) constant of the vascularcooling plates.
3538 K.-H. Cho, M.-H. Kim / International Journal of Heat and Mass Transfer 55 (2012) 3533–3540
perpendicular to the direction of fluid flow, as depicted in Fig. 2. Wemonitored the highest temperature ~Tmax, not the locations, wherethe hot spots occur. Note that the locations change as the dimen-sionless pressure drop number Be change, and with time.
Fig. 5 shows the time evolution of the global thermal resistance(~Rmax) for all configurations when the pressure drop (DP) is fixed at1 kPa. Each curve represents a flow structure. In the large ~t limit,the dimensionless peak temperature ~Rmax reaches a steady-statelevel that depends on channel configurations and Be, as illustratedin Figs. 4 and 5. Here we define a dimensionless time to character-ize the time evolution of the dimensionless peak temperature. Thecharacteristic response time ~tss is the time when the dimensionlessmaximum temperature ~Rmax reaches 99% of the steady-state levelof the dimensionless maximum temperature ~Rmax ;ss:
~Rmax ~tss� �
¼ 0:99~Rmax;ss ð28Þ
The 0.99 value is a choice that we made from the Blasius formula forthe laminar boundary layer thickness [10].
The characteristic response time ~tss is plotted against theimposed pressure drop number (Be) in Fig. 6 and its behavior issimilar to that of the steady-state peak temperature, as illustratedin Fig. 4. The analogy between the global thermal resistance andthe characteristic time is noteworthy: they depend in the sameway on Be. Effective cooling calls for designs with fast response,i.e., short ~tss values.
Fig. 5. The time evolution of the maximum dimensionless temperature (~Rmax).
Fig. 6. The characteristic time (~tss) as a function of the pressure drop number (Be).
3.3. Time delay on cooling
The main objective of the vascularized wall design is to protectthe wall from overheating. In practice a time delay ~td exists be-tween sensing and actuating, that is before the pumping of the
(a)
(b)
Fig. 8. The effect of the coolant time delay on the evolution of the peak temperaturefor the first construct with 20 � 20 elements (Be = 7.7 � 1010): (a) D1 – D2, (b)D1 = D2.

K.-H. Cho, M.-H. Kim / International Journal of Heat and Mass Transfer 55 (2012) 3533–3540 3539
coolant begins. If the time delay is too long, the peak temperatureswill exceed the steady-state value. Hence the key design questionis how long a response delay is permissible.
The allowable time delay is determined by two factors. One ishow fast the vascularized wall is cooled by the coolant, and thisis associated with the characteristic response time that we havestudied in the previous section. The other accounts for how fastthe peak temperature rises during the delay, when there is no cool-ant. If the peak temperature increases slowly during the delay, andresponds fast after the coolant starts flowing, then the allowabletime delay is long, which is an attractive feature in design (robust-ness) [10].
In order to evaluate the second factor, we define the thermalinertia time, or time constant ~tc, which is the time when thehot-spot temperature reaches the steady-state hot-spot tempera-ture when the coolant is not flowing:
~Rmax;no flow ~tc� �¼ ~Rmax;ss ð29Þ
First, we determined the characteristic time of the vascular system– the thermal inertia time ~tc, as illustrated in Fig. 7.
At t = 0+, the uniform heat flux q00 is applied on a cooling platethat is not bathed by coolant (initially the tree channels are filledwith stagnant coolant) and all the remaining external surfacesare adiabatic. At t ¼ ~td, the coolant starts to flow in steady fullydeveloped fashion. If the coolant is not flowing, then shortly after
(a)
(b)
Fig. 9. The effect of the coolant time delay on the evolution of the peak temperaturefor the second construct with 20 � 20 elements (Be = 7.7 � 1010): (a) D1 – D2, (b)D1 = D2.
t = 0+ the peak temperature of the system increases almost linearlyin time. The system is also characterized by its steady-state peaktemperature indicated by ~Rmax ;ss, which occurs late enough whenthe coolant is flowing. The intersection of the two lines definesthe thermal inertia time ~tc. The time delay before the start of theflow of coolant is set in relation to ~tc, as a fraction of the timeconstant determined in Eq. (29) and Fig. 7:
s ¼~td
~tcð30Þ
In Figs. 8–10, we investigated the effect of s on the unsteadyresponse of the vascularized cooling plates. When the delay timeis larger than a critical value (called sc), the peak temperature over-shoots the steady-state level. The overshoot must be avoided so thatthe peak temperature worthiness of the vascular design continuesto be described by the steady-state peak temperature. Furthermore,the critical time delay sc is a valuable feature to know because itrepresents the longest delay time within which the vascular coolingplate is still safe to operate without coolant flowing.
Figs. 8–10 show the evolution of the dimensionless maximumtemperature during a time delay. During the delay time, there isno flow and the dimensionless maximum temperature risesrapidly. When the coolant begins to flow, the rise of dimensionlesspeak temperature slows down. The dimensionless maximum tem-perature becomes saturated without overshoot at the steady-state
(a)
(b)
Fig. 10. The effect of the coolant time delay on the evolution of the peaktemperature for the third construct with 20 � 20 elements (Be = 7.7 � 1010): (a)D1 – D2, (b) D1 = D2.

Fig. 11. Critical time delay vs. pressure drop number (Be) for the second constructwith 20 � 20 elements.
3540 K.-H. Cho, M.-H. Kim / International Journal of Heat and Mass Transfer 55 (2012) 3533–3540
maximum temperature when the time delay s is relatively brief(e.g., at a time delay below s = 0.44, as illustrated in Fig. 8(a)),whereas the dimensionless maximum temperature overshootoccurs when the time delay s is relatively large (say, aboves = 0.47, as shown in Fig. 8(a)). The horizontal dashed line showsthe steady-state maximum temperature, or the allowable maxi-mum temperature. When the time delay s is less than approxi-mately 1, the unsteady peak temperature can be kept under theallowable level. Fig. 9 shows the critical delay time for the first con-struct design is sc = 0.45 for the optimized configurations (D1 – D2)and sc = 0.56 for the non-optimized configurations (D1 = D2). Simi-larly, Fig. 10 shows the critical delay time for the second constructdesign is sc = 0.55 for the optimized configurations (D1 – D2) andsc = 0.60 for the non-optimized configurations (D1 = D2). Finally,Fig. 11 shows the critical delay time for the third construct designis sc = 0.52 for the optimized configurations (D1 – D2) and sc = 0.57for the non-optimized configurations (D1 = D2). Such a trend for thedesign of the optimized configurations is caused by the lower flowresistance than that of the non-optimized configurations. The sc
values were estimated approximately by extrapolation becausethe overshooting can be discerned only when s is greater than sc.
We also performed many time-dependent simulations byincreasing the pressure drop number (Be) for the optimized andnon-optimized second construct. The results for sc are summarizedin Fig. 11. It shows a minimum sc in both the optimized and thenon-optimized channel configurations across all working condi-tions. The minimum sc value is 0.56 in the vicinity of the pressuredrop DP = 300 Pa for the optimized channel configurations and 0.6in the vicinity of the pressure drop DP = 1 kPa for the non-opti-mized channel configurations. When the applied pressure differ-ence is specified, there is a less desirable point that offers smallerallowable delay time (lower sc).
4. Conclusions
In this study we documented the unsteady-state cooling perfor-mance of vascular cooling plates subjected to sudden heating andcooled with single-phase coolant flowing through constructalchannels. The three flow configurations described in this paper
are the first, second, and third constructal structures with opti-mized hydraulic diameters (D1 – D2) and non-optimized hydraulicdiameter (D1 = D2) for one system size, 20 � 20. The chief objectivewas to determine the longest permissible time delay so that themaximum temperatures do not exceed the maximum allowablelimit. The configurations with fast heat removal time are the mostattractive: the designs with the optimized first construct outper-form the second and third constructs in the optimized constructalconfigurations when the pressure drop is fixed as DP ffi 1 kPa. Wesuggest that it is the best to cool with the first construct in the opti-mized constructal configurations when Be is lower than 1 � 1011
and the best structure is the second constructal structure whenBe is greater than 2 � 1011, whereas the best structure in thenon-optimized constructal configurations is the third construct,as illustrated in Figs. 4 and 6.
We also documented the effect of the time delay that separatesthe cooling process from the start of sudden heating. The bestconfiguration is the second construct for both the optimized andnon-optimized constructal structures, as shown in Figs. 8–10.
In conclusion, the configuration of the vascular architecture isessential to ensuring the best performance of the vascular material.When the applied pressure difference is specified, there is a certainchannel configuration, depending on the Be number, that offersbetter cooling (lower ~Rmax, Fig. 4) and a longer allowable delay time(higher sc, Figs. 8–10).
Acknowledgment
The authors thank Dr. A. Bejan for his valuable comments.
References
[1] K.H. Cho, J. Lee, M.H. Kim, A. Bejan, Vascular design of constructal structureswith low flow resistance and nonuniformity, Int. J. Therm. Sci. 49 (2010) 2309–2318.
[2] P. Xu, X.Q. Wang, A.S. Mujumdar, C. Yap, B.M. Yu, Thermal characteristics oftree shaped microchannel nets with/without loops, Int. J. Therm. Sci. 48 (2009)2139–2147.
[3] S.W. Kim, S. Lorente, A. Bejan, Vascularized materials: tree-shaped flowarchitectures matched canopy to canopy, J. Appl. Phys. 100 (2006) 063525.
[4] K.M. Wang, S. Lorente, A. Bejan, Vascularized networks with two optimizedchannel sizes, J. Phys. D. Appl. Phys. 39 (2006) 3086–3096.
[5] J. Lee, S. Kim, S. Lorente, A. Bejan, Vascularization with trees matched canopyto canopy: diagonal channels with multiple sizes, Int. J. Heat Mass Transfer 51(2008) 2029–2040.
[6] S.R. White, N.R. Sottos, P.H. Geubelle, J.S. Moore, M.R. Kessler, S.R. Sriram, E.N.Brown, S. Viswanathan, Autonomic healing of polymer composites, Nature 409(2001) 794–797.
[7] N. Rudraiah, C. Ng, A model for manufacture of nano-sized smart materials freefrom impurities, Curr. Sci. 86 (2004) 1076–1091.
[8] K.S. Toohey, N.R. Sottos, J.A. Lewis, J.S. Moore, S.R. White, Self-healing materialswith microvascular networks, Nat. Mater. 6 (2007) 581–585.
[9] K.H. Cho, J. Lee, H.S. Ahn, A. Bejan, M.H. Kim, Fluid flow and heat transfer invascularized cooling plates, Int. J. Heat Mass Transfer 53 (2010) 3607–3614.
[10] S. Kim, S. Lorente, A. Bejan, Transient behavior of vascularized walls exposed tosudden heating, Int. J. Therm. Sci. 48 (2009) 2046–2052.
[11] A. Bejan, Shape and Structure: From Engineering to Nature, CambridgeUniversity Press, Cambridge, UK, 2000.
[12] A. Bejan, Advanced Engineering Thermodynamics, second ed., Wiley, NewYork, 1997.
[13] A. Bejan, S. Lorente, Design with Constructal Theory, Wiley, Hoboken, NJ, 2008.[14] S. Bhattacharjee, W.L. Grosshandler, The formation of a wall jet near a high
temperature wall under microgravity environment, ASME HTD 96 (1988) 711–716.
[15] S. Petrescu, Comments on the optimal spacing of parallel plates cooled byforced convection, Int. J. Heat Mass Transfer 37 (1994) 1283.
[16] FLUENT, version 6.3, User’s Manual, ANSYS, Inc., 2007.[17] S.V. Patankar, Numerical Heat Transfer and Fluid Flow, Hemisphere,
Washington DC, 1980.