
Training and Optimization - cs.haifa.ac.il
92
Training and Optimization Many slides from: Stanford CS231 1
Transcript of Training and Optimization - cs.haifa.ac.il

Training and Optimization
Many slides from: Stanford CS231
1

• A network is represented using a computation graph.
• Our goal: learning the network parameters through
optimization.
Where are we now?
�
W1 b1
� ℒ
W2 b2
�ℎlossLinearLinear �(�)
2

Loop:
1. Sample a batch of data
2. Forward prop it through the graph (network), get loss
3. Backprop to calculate the gradients
4. Update the parameters using the gradient
Mini-batch SGD
�
W1 b1
� ℒ
W2 b2
�ℎlossLinearLinear �(�)
�� = − �� ��ℒ� �
�
��� 3

• One time setup:
activation functions, preprocessing, weight initialization,
regularization, gradient checking
• Training dynamics:
babysitting the learning process, parameter updates,
hyperparameter optimization
• Evaluation:
Bias vs. variance
Training and Optimization: Overview
Source: Stanford CS231
4
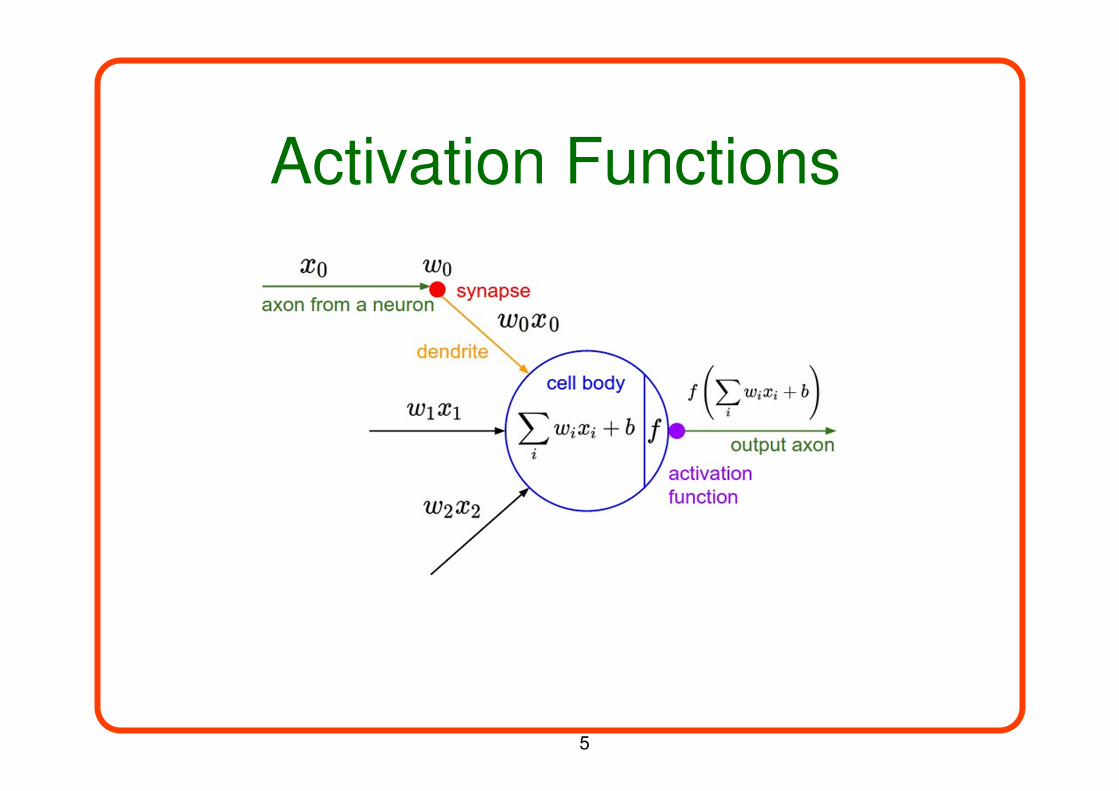
Activation Functions
5
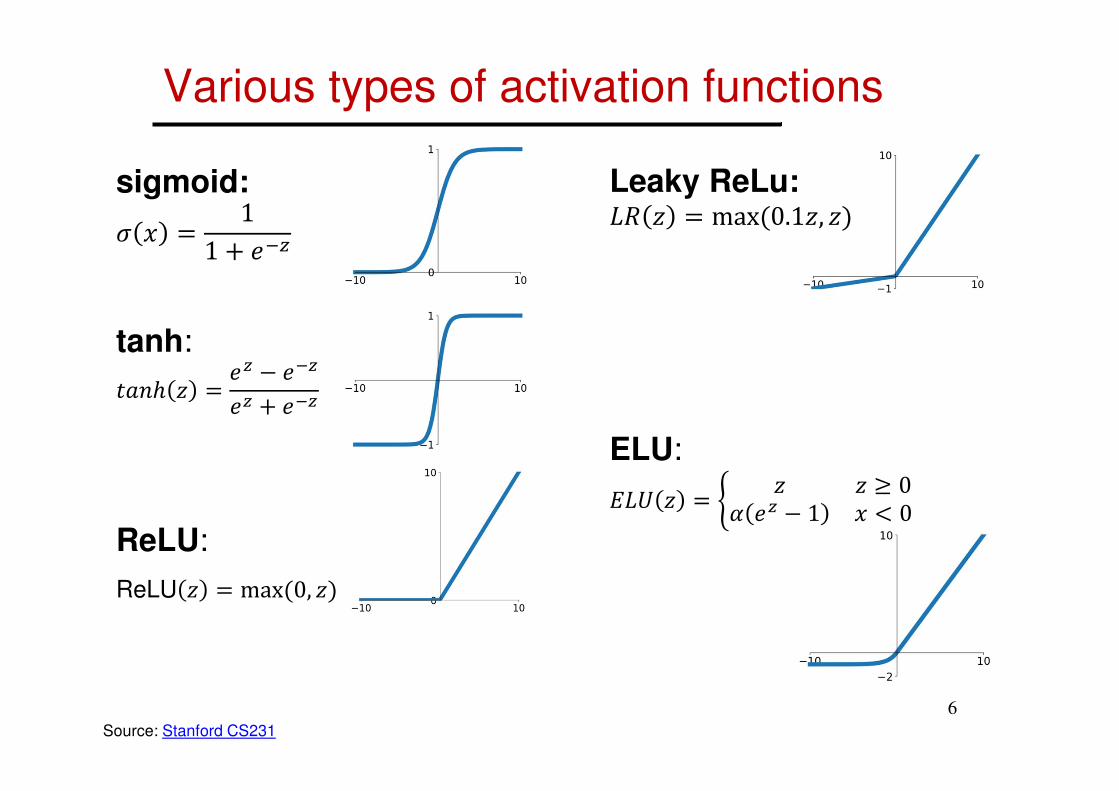
Various types of activation functions
Source: Stanford CS231
sigmoid:
� � = 11 � ���
tanh:
���ℎ � �� � ����� � ���
ReLU:
ReLU � max �0, ��
Leaky ReLu:%& � max �0.1�, ��
ELU:
(%) � * � � + 0, �� � 1 � - 0
6

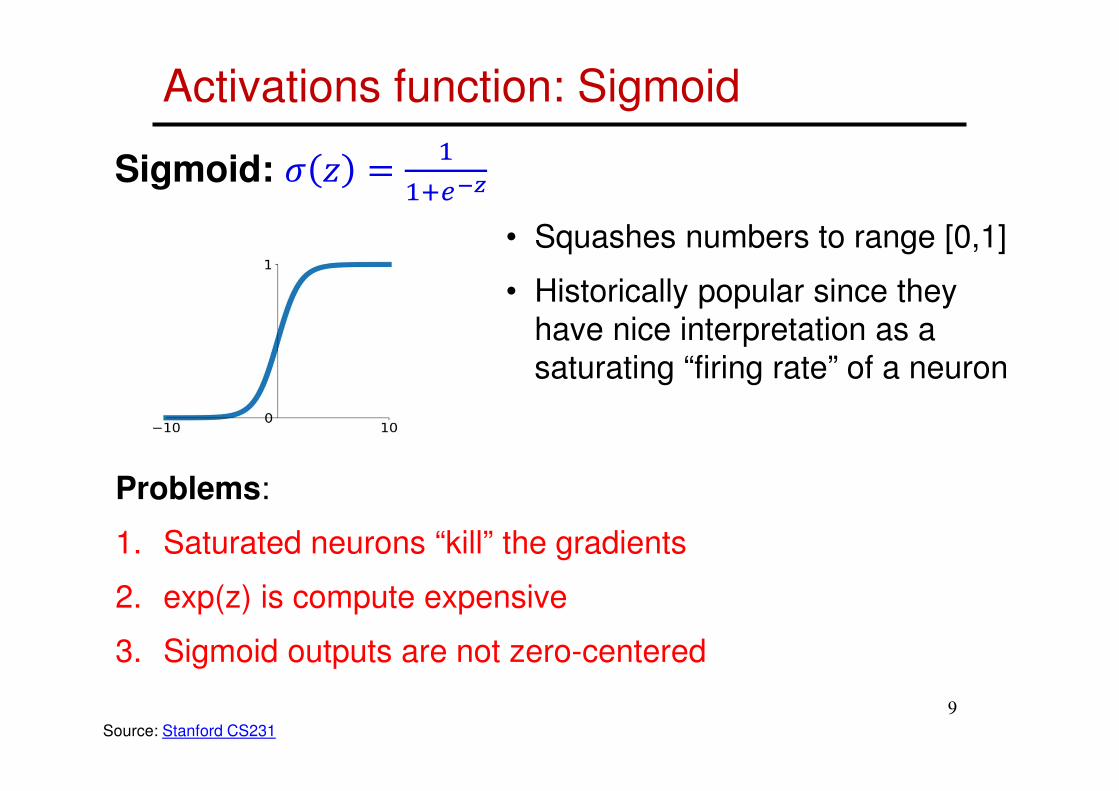
Sigmoid: � � ���./0
Activations function: Sigmoid
Source: Stanford CS231
• Squashes numbers to range [0,1]
• Historically popular since they
have nice interpretation as a
saturating “firing rate” of a neuron
Problems:
1. Saturated neurons “kill” the gradients
7

Activations function: Sigmoid
Source: Stanford CS231
• What happens when � �10 ?• What happens when � 0 ?• What happens when � 10 ?
sigmoid
gate�����
� �
�ℒ��
�ℒ�� �ℒ
������
8
Activations function: Sigmoid
Source: Stanford CS231
• Squashes numbers to range [0,1]
• Historically popular since they
have nice interpretation as a
saturating “firing rate” of a neuron
Sigmoid: � � ���./0
Problems:
1. Saturated neurons “kill” the gradients
2. exp(z) is compute expensive
3. Sigmoid outputs are not zero-centered
9

Activations function: Sigmoid
Source: Stanford CS231
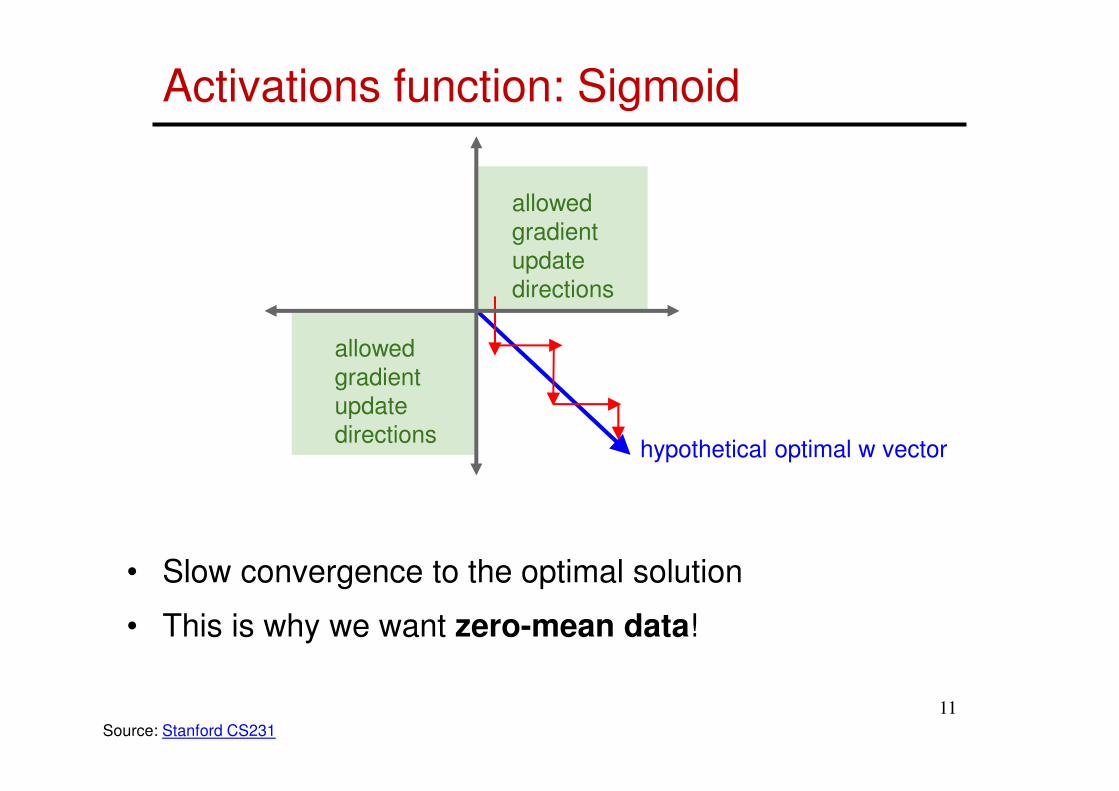
Sigmoid outputs are not zero-centered
• What happens to the gradients of 1 when the input to a
neuron is always positive?
• Answer: 2ℒ23 will be all positive or negative
• So, what is wrong with that?
4�56 � 7�
�ℒ�4
�ℒ�1 �ℒ
�4�4�1
, 7�4�1 48 � 6
10
Activations function: Sigmoid
Source: Stanford CS231
• Slow convergence to the optimal solution
• This is why we want zero-mean data!
hypothetical optimal w vector
allowed
gradient
update
directions
allowed
gradient
update
directions
11

tanh:
Activations function: tanh
Source: Stanford CS231
• Squashes numbers to range [-1,1]
• Zero-centered (nice)
• Still “kills” gradients when saturated (active in small range)
• Still exp(z) is compute expensive
���ℎ � �� � ����� � ���
12

ReLU (Rectified Linear Unit):
Activations function: ReLU
• Does not saturate (in the � 9 0 region)
• Computationally very efficient
• Converges much faster than sigmoid/tanh (6x)
• Not zero-centered
• “Dead” parameter regions
:�;� max �<, ;�
Source: Stanford CS231
13

Activations function: ReLU
Source: Stanford CS231
“Dead” parameter regions
• What happens when � 10 ?• What happens when � 0 ?• What happens when � �10 ?
ReLU
gate��4��
4 � max�0, z�
�ℒ�4
�ℒ�� �ℒ
�4�4��
14

Activations function: ReLU
Source: Stanford CS231
DATA CLOUDactive ReLU
Dead ReLU
will never activate
never update 15

ReLU alternatives
Source: Stanford CS231
• Does not saturate
• Computationally efficient
• Converges fast
• Will not “die”
• Related alternative: Parametric ReLU
4 � max ,�, � and backprop into ,
Leaky ReLU
4 � max 0.01�, �
16

ReLU alternatives
Source: Stanford CS231
• All benefits of ReLU
• Does not die
• Close to zero mean outputs
• Computation requires exp()
Exponential Linear Units (ELU)
4 � * � >4 � 9 0, exp � � 1 � A 0
17

TDLR: Activation functions
Source: Stanford CS231
• Use ReLU. Be careful with your learning rates
• Try out Leaky ReLU / ELU
• Try out tanh but don’t expect much
• Don’t use sigmoid
18
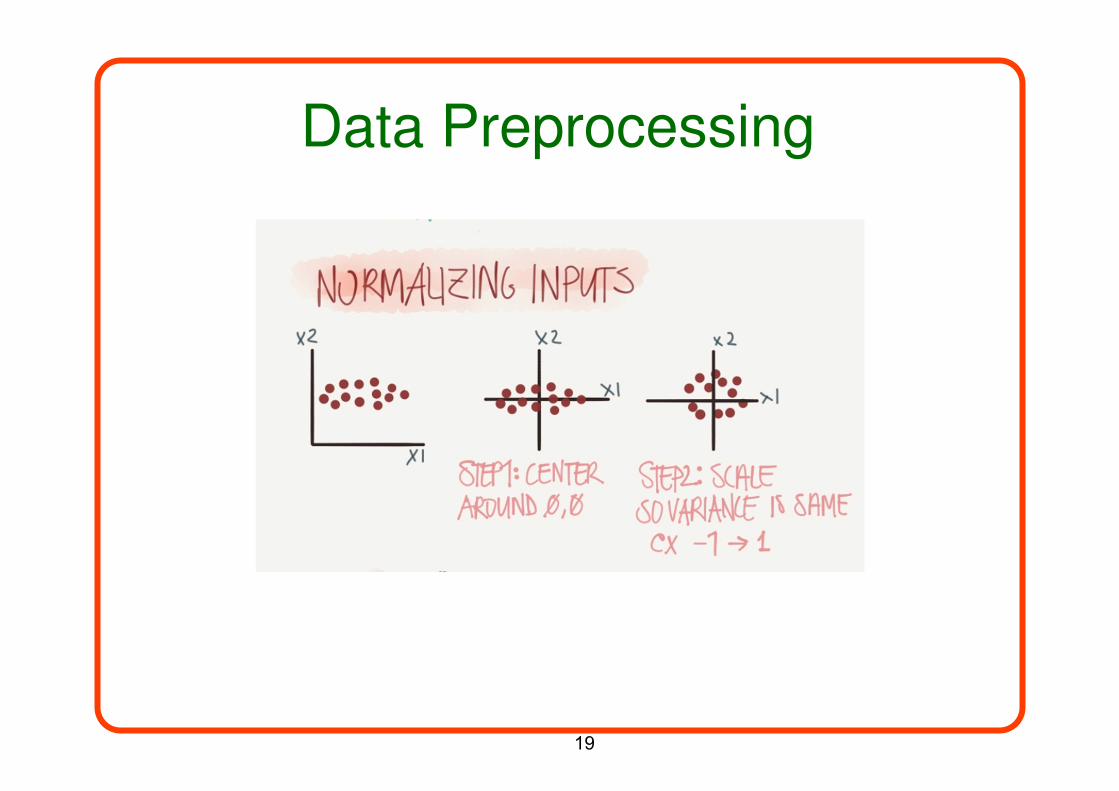
Data Preprocessing
19

• For a linear neuron with a squared
error, it is a quadratic bowl.
• Vertical cross-sections are parabolas.
• Horizontal cross-sections are ellipses.
• For multi-layer, non-linear nets the error
surface is much more complicated.
• But locally, a piece of a quadratic bowl
is usually a very good approximation.
Data preprocessing
Source: Geoffrey Hinton
Reminder: The error surface for a linear neuron
20

Data preprocessing
Source: Geoffrey Hinton
• Going downhill reduces the error, but the direction of
steepest descent does not point at the optimal point unless
the ellipse is a circle.
• The gradient is big in the direction in which we only want to
travel a small distance.
• The gradient is small in the direction in which we want to
travel a large distance.
• This produces zig-zag path.
21

Zero centering
Source: Geoffrey Hinton
• When using steepest descent, shifting the input values
makes a big difference.
• It usually helps to transform each component of the input
vector so that it has zero mean over the whole training set.
�� �B �101 101 2101 99 2
�� �B �1 1 21 �1 2
gives error surface
gives error surface�� �B

Scaling
Source: Geoffrey Hinton
• When using steepest descent, scaling the input values
makes a big difference.
• It usually helps to transform each component of the input
vector so that it has unit variance over the whole training set.
�� �B �0.1 10 20.1 �10 2
�� �B �1 1 21 �1 2
gives error surface
gives error surface�� �B

Data preprocessing
(Assume X [NxD] is a data matrix, each example in a row)
�� �� � E���
Source: Stanford CS231
24

Data preprocessing
Source: Stanford CS231
(data has diagonal
covariance matrix)
(covariance matrix is
the identity matrix)
• In practice, you may also see PCA and Whitening of the
data.
• This can be performed using SVD:
X ← H �I��� H, ��>J 0 , ), K, L JMN H , H3O�. K��/B)5H• For linear neuron, this converts the data to be uncorrelated.

Data preprocessing
Data preprocessing for images:
• Subtract the mean image (all input images need to have
the same resolution).
• Subtract per-channel means (images don’t need to
have the same resolution).
• Be sure to apply the same transformation at training and
test time! Save training set statistics and apply to test
data.
• Not common to normalize variance, or to apply PCA or
whitening (why).
26

Weight Initialization
27

Weight initialization:
• What’s wrong with initializing all weights to be the same
number (e.g. zero)?
• If two hidden units have exactly the same incoming and
outgoing weights, they will always get exactly the same
values.
• The gradients is also the same for every unit, thus, all
the weights have the same values in the subsequent
iterations.
1�
1B
possible weights

Weight initialization: Experiments
• Initiate the weights with small random numbers (Gaussian with zero mean and � standard deviation): 1 ~R�0, ��
Source: Stanford CS231
HD
W σ ∗ np. random. randn�D, H�
29

Weight initialization: Experiments
• 10-layer network
• 10 neurons on each layer
• tanh non-linearities
• Iinitialized by randn
Source: Stanford CS231
Recall: For two independent random variables:M�\ �� M�\ � M�\ � � (B � M�\ � � (B � M�\ � M�\ � � � M�\ � � M�\ � ; M�\ �� �B M�\ � ,

First try: Initiate the weights with zero mean Gaussian
values with 1E-2 standard deviation.
Weight initialization: Experiments
All activations
become zero!
Q: think about the
backward pass.
What do the
gradients look like?
Hint: think about
backward pass for
a ^� gate.
Source: Stanford CS231
31

Second try: Initiate the weights with zero mean Gaussian
values with 1.0 standard deviation
Weight initialization: Experiments
Almost all neurons
completely
saturated, either -1
and 1. Gradients
will be all zero.
Source: Stanford CS231
32

Third try: Initiate the weights with zero mean Gaussian
values with 1.0/sqrt(10)=0.316 standard deviation
Weight initialization: Experiments
Source: Stanford CS231
33
Why 1/sqrt(10)?
If ��~_ 0,1 , and
� � ��1����..�`
Then
M�\ � � M�\ 1� M�\����
���..�`
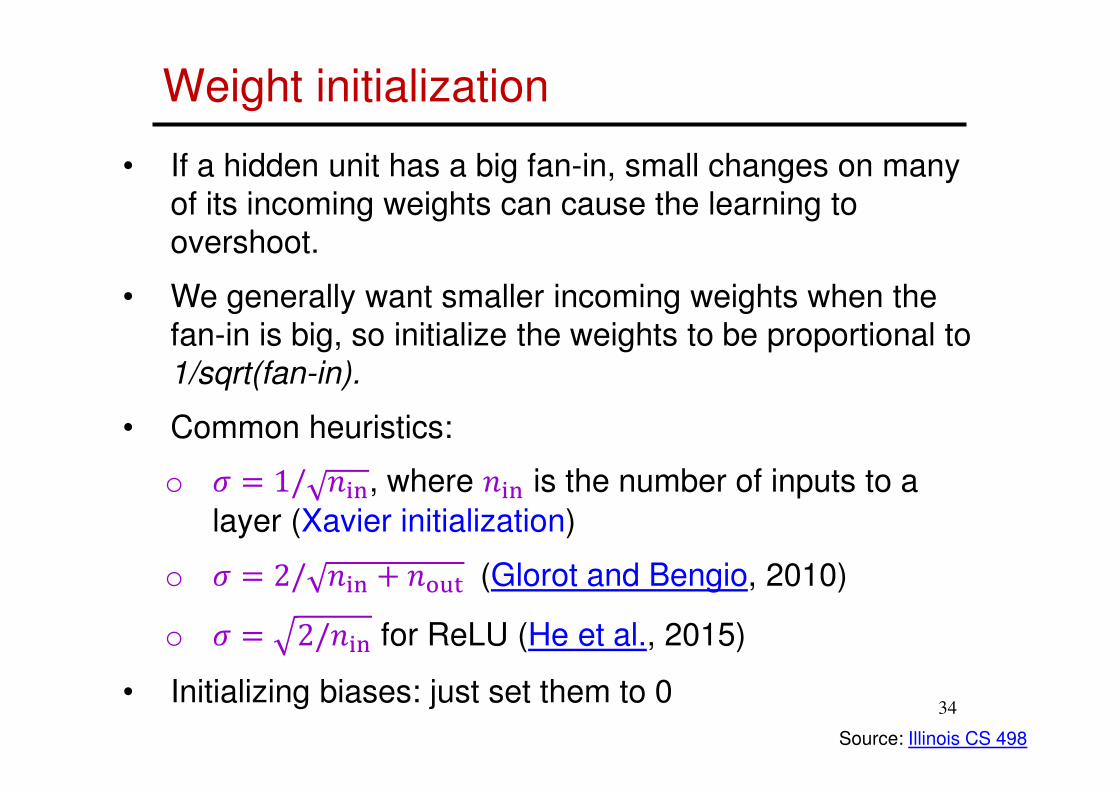
Weight initialization
• If a hidden unit has a big fan-in, small changes on many
of its incoming weights can cause the learning to
overshoot.
• We generally want smaller incoming weights when the
fan-in is big, so initialize the weights to be proportional to
1/sqrt(fan-in).
• Common heuristics:
o � 1/ �ab, where �ab is the number of inputs to a
layer (Xavier initialization)
o � 2/ �ab � �cde (Glorot and Bengio, 2010)
o � = 2/�ab for ReLU (He et al., 2015)
• Initializing biases: just set them to 0
Source: Illinois CS 498
34

Weight initialization
• When using the ReLU nonlinearity with � = 1/ �ab it breaks.
Source: Stanford CS231
35

Weight initialization
• When using � = 2/�ab for ReLU (He et al., 2015)
Source: Stanford CS231
36
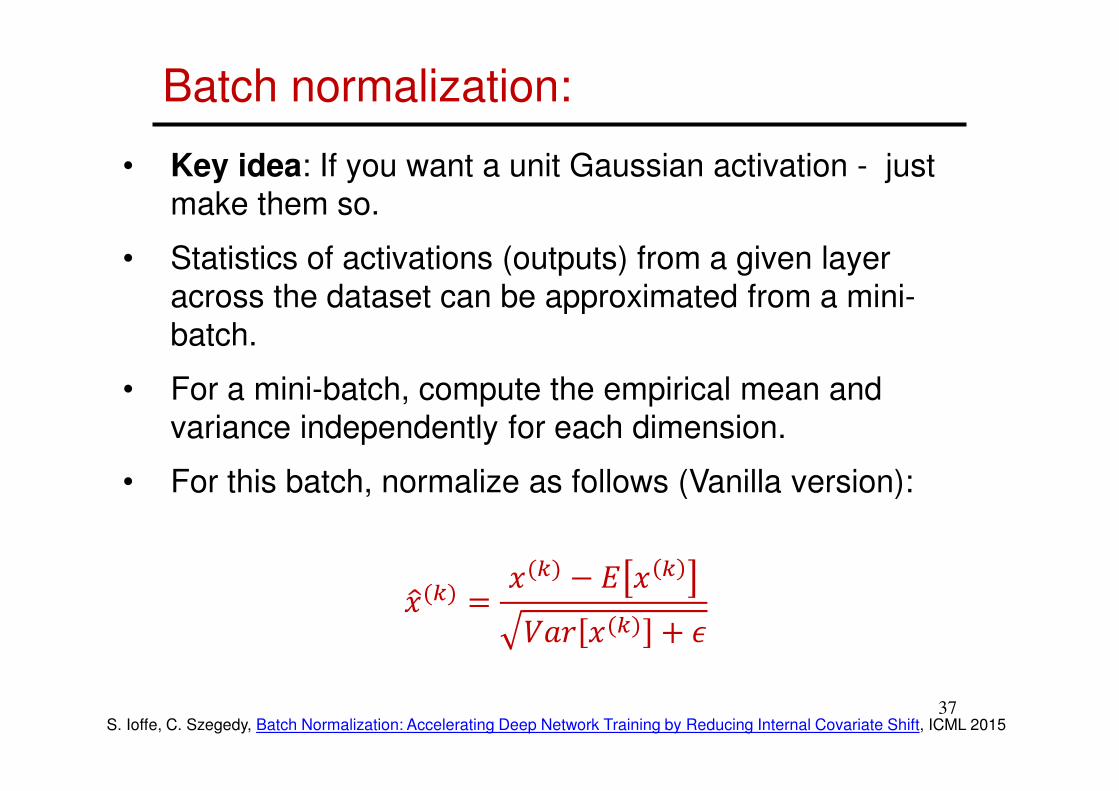
Batch normalization:
• Key idea: If you want a unit Gaussian activation - just
make them so.
• Statistics of activations (outputs) from a given layer
across the dataset can be approximated from a mini-
batch.
• For a mini-batch, compute the empirical mean and
variance independently for each dimension.
• For this batch, normalize as follows (Vanilla version):
�f(g) = �(g) − ( � g
L�\ �(g) � h
S. Ioffe, C. Szegedy, Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift, ICML 201537

Batch normalization
Usually inserted after Fully Connected
layers / (or Convolutional, as we’ll see
soon), and before nonlinearity.
Problem: do we really want a unit
Gaussian input to a tanh layer?
Solution: Allow the network to modify
the scale and bias , if needed.
FC
BN
tanh
FC
BN
tanh
...
Source: Stanford CS231
38

Batch normalization
• Batch Normalization – full version:
�f(g) = �(g) − ( � g
L�\ �(g) � h
then allow the network to squash the range if it wants to:
� = i(g) �f(g) � j(g)where i and j are learned through the back prop.
• Note, the network can learn:
i(g) = L�\ �(g) and j(g) = ( � g
recovering the identity mapping
Source: Stanford CS231
39

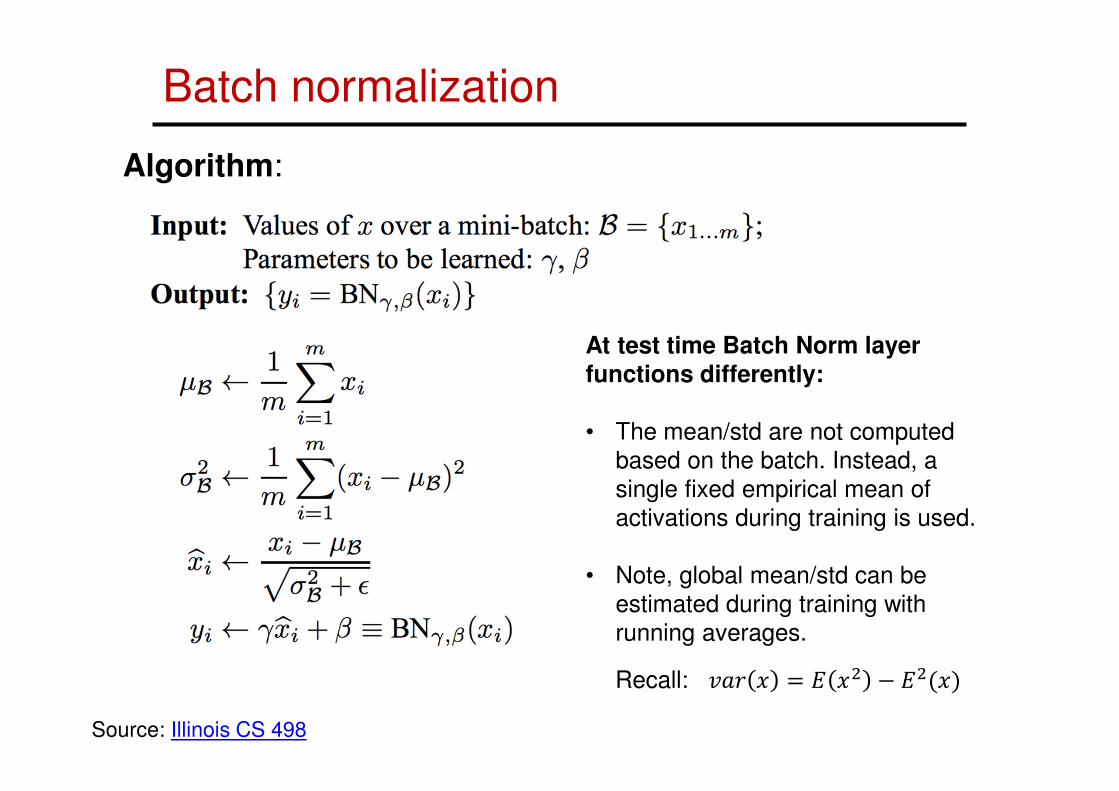
Batch normalization
Algorithm:
Source: Illinois CS 498
40
Batch normalization
Algorithm:
Source: Illinois CS 498
At test time Batch Norm layer functions differently:
• The mean/std are not computed
based on the batch. Instead, a
single fixed empirical mean of
activations during training is used.
• Note, global mean/std can be
estimated during training with
running averages.
Recall: M�\ � = ( �B − (B(�)
Batch normalization
Benefits
• Prevents exploding and vanishing gradients
• Keeps most activations away from saturation regions of
non-linearities
• Accelerates convergence of training
• Makes training more robust w.r.t. hyperparameter
choice, weight initialization
Pitfalls
• Behavior depends on composition of mini-batches, can
lead to hard-to-catch bugs if there is a mismatch
between training and test regime
Source: Illinois CS 498
42

Regularization
43
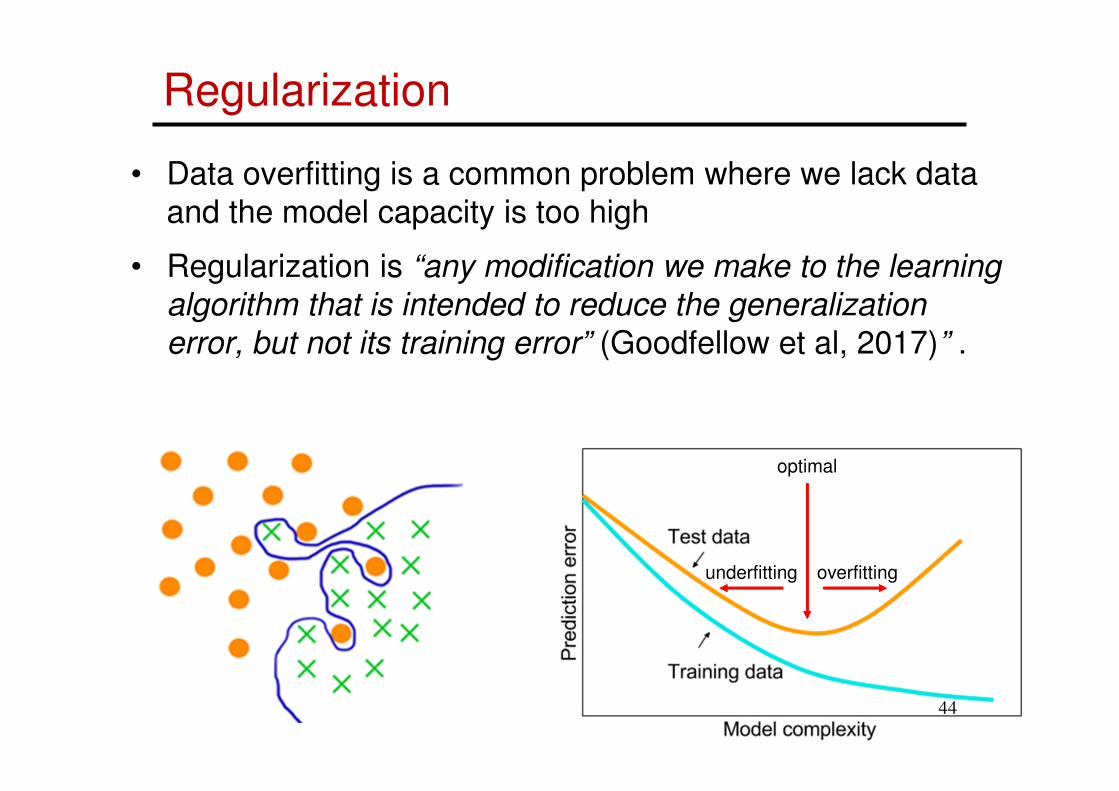
Regularization
• Data overfitting is a common problem where we lack data
and the model capacity is too high
• Regularization is “any modification we make to the learning
algorithm that is intended to reduce the generalization
error, but not its training error” (Goodfellow et al, 2017)” .
optimal
overfittingunderfitting
44

L2 regularization
• Regularized objective:
ℒk�1� l2 1 BB ��m�1, ����, �����
n
���• Gradient of objective:
∇ℒk�1� l1 ��∇m�1, ����, �����n
���• SGD update:
1 ← 1 � � l1 � ∇m 1, ����, ����1 ← 1 � �l 1 � �∇m 1, � � , � �
Interpretation: weight decay45

L1 regularization
• Regularized objective:
ℒk 1 l 1 � ��m 1, ����, ����n
��� l� 1p
p��m 1, ����, ����
n
���• Gradient: ∇ℒk 1 l sgn �1� � ∑ ∇m�1, ����, �����n���
• SGD update:1 ← 1 � �l sgn 1 � �∇m 1, ����, ����
• Interpretation: encouraging sparsity
46

Regularization: dropout
• At training time, in each forward pass, turn off some
neurons with probability 1-p
• At test time, to have deterministic behavior, use the
full network and multiply output of neuron by p
Srivastava et al. Dropout: A Simple Way to Prevent Neural Networks from Overfitting, JMLR 201447

Regularization: dropout
Srivastava et al. Dropout: A Simple Way to Prevent Neural Networks from Overfitting, JMLR 201448

Regularization: dropout
Intuitions:
1. Forces the network to have a redundant representation
2. prevent “co-adaptation” of units, increase robustness to
noise
3. Can be seen as a large ensemble of models that share
parameters
has an ear
has a tail
is furry
has claws
mischievous
look
X
X
X
cat
score
Source: Stanford CS231
49
Non-redundant representation

Ensemble
Network
1
Network
2
Network
3
Network
4
Train a bunch of networks with different structures
Training
Set
Set 1 Set 2 Set 3 Set 4
Source: Lee Hung-yi50

Ensemble
y1
Network
1
Network
2
Network
3
Network
4
Testing data x
y2 y3 y4
average
Source: Lee Hung-yi51
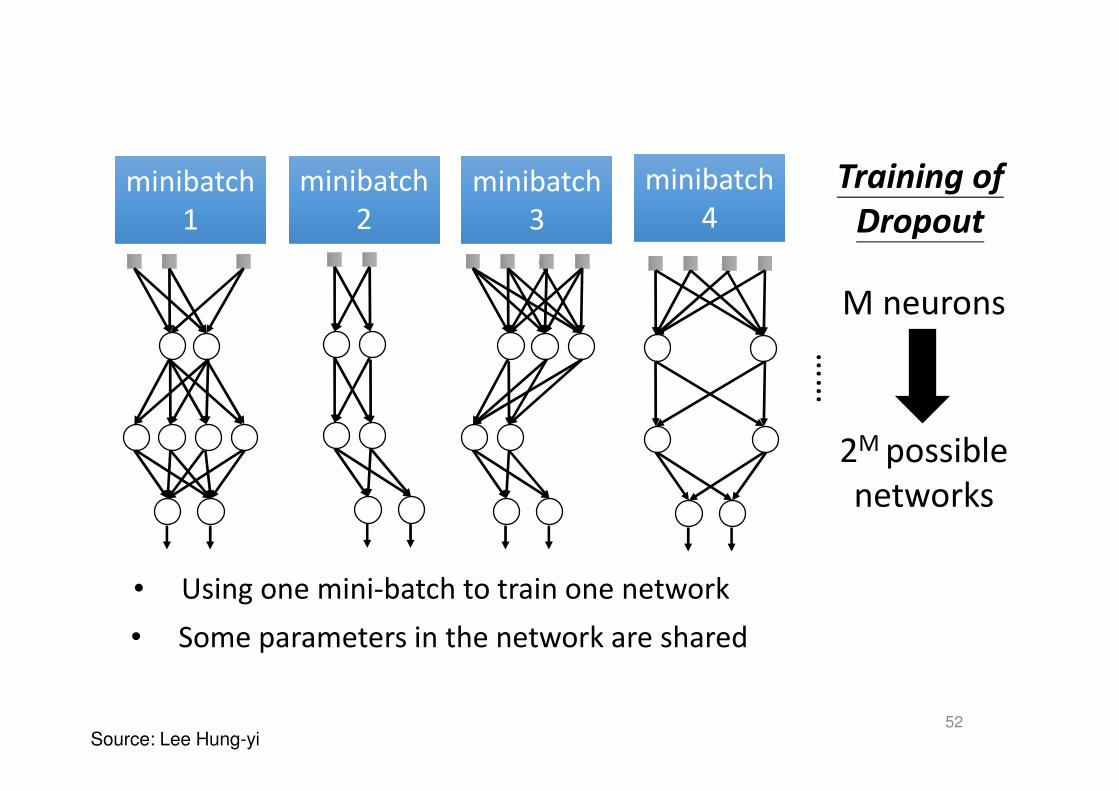
Training of
Dropout
minibatch
1
minibatch
1
……
• Using one mini-batch to train one network
• Some parameters in the network are shared
minibatch
2
minibatch
2
minibatch
3
minibatch
3
minibatch
4
minibatch
4
M neurons
2M possible
networks
Source: Lee Hung-yi52

testing data xTesting of Dropout
……
average
y1 y2y3
Multiply all
activations
by p
= y
Source: Lee Hung-yi53

Dropout Summary
54
Dropout Summary
drop in forward pass
scale at test time
Source: Stanford CS231
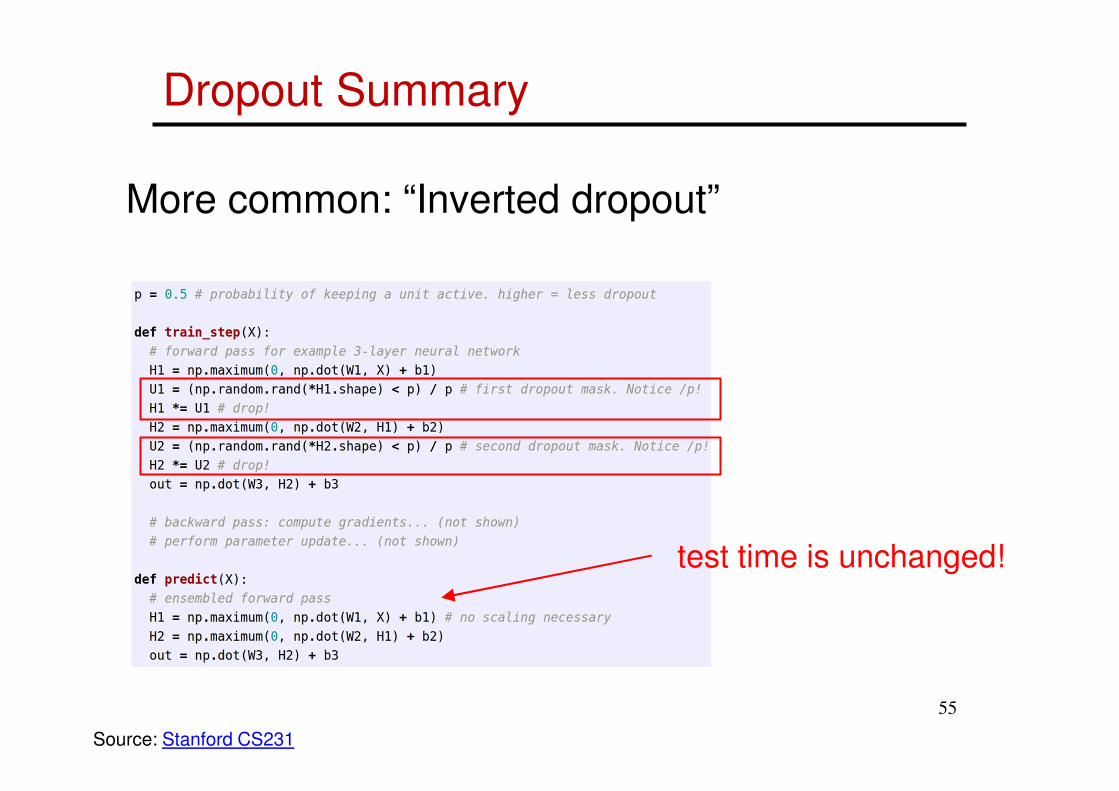
Dropout Summary
55
More common: “Inverted dropout”
test time is unchanged!
Source: Stanford CS231

Regularization: drop connect
• Drop-Connect works similarly to dropout, except that we
disable individual weights (i.e., set them to zero), instead
of nodes.
• Drop-Connect is a generalization of Drop-out because it
produces more possible models, as there are almost
always more connections than units.
56

Regularization: Data augmentation
Intuition: If you have few examples – generate new
examples from the existing ones.
• Introduce transformations not adequately sampled in
the training data
• Geometric: flipping, rotation, shearing, multiple crops
• Photometric: Color transformations, add noise, etc.
Source: Stanford CS231
Rorartions
57

Regularization: Data augmentation
Zooming Occlusions Cropping
Color
transformations
Add noise58

Regularization: Data augmentation
• Use many transformations. Go crazy!
• But avoid introducing obvious artifacts
Source: Stanford CS231
59

Early stopping
• Idea: do not train a network to achieve too low training
error
• Monitor validation error to decide when to stop
60

Early stopping
• Idea: do not train a network to achieve too low training
error
• Monitor validation error to decide when to stop
61

Transfer Learning
• Transfer learning is a method where a pre-trained
network on one task is re-used on a second task
• Two possibilities:
o Use the pre-trained model as a starting point for the second-task
o Freeze the lower part of the network and retrain the last part
62

Transfer Learning
• Transfer learning is useful where we lack annotated data
Source: Stanford CS231
63
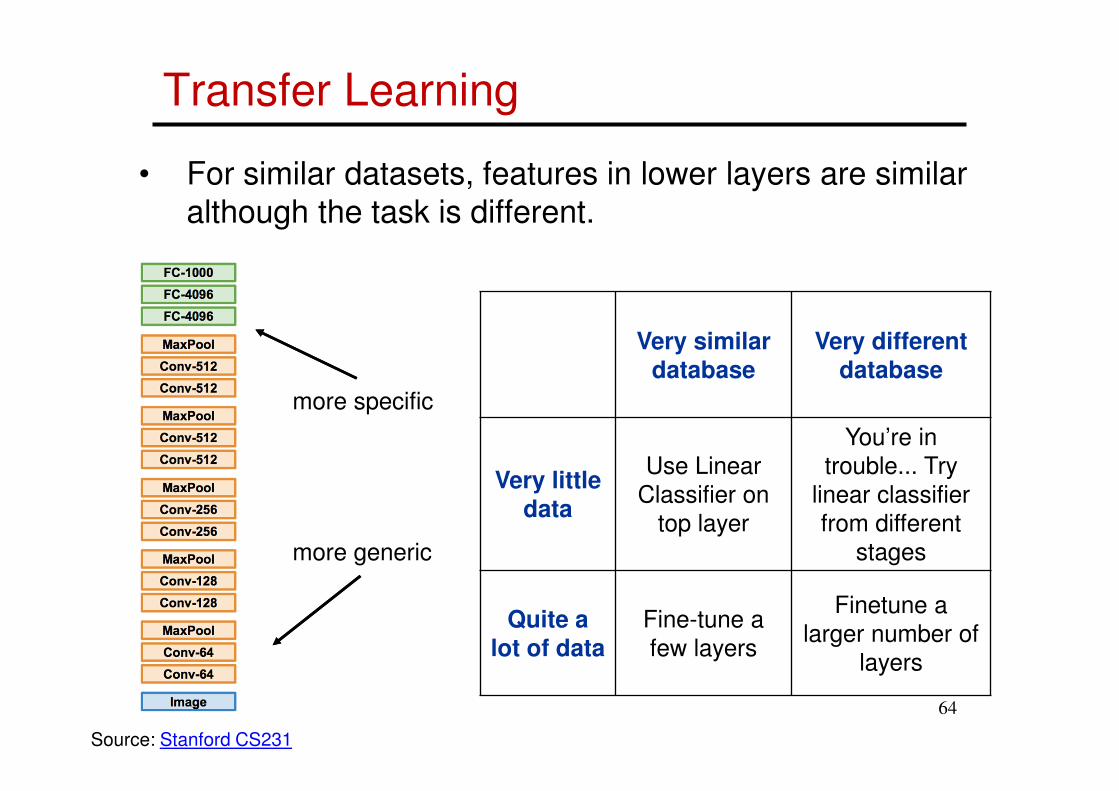
Transfer Learning
• For similar datasets, features in lower layers are similar
although the task is different.
Very similar database
Very different database
Very little data
Use Linear
Classifier on
top layer
You’re in
trouble... Try
linear classifier
from different
stages
Quite a lot of data
Fine-tune a
few layers
Finetune a
larger number of
layers
more specific
more generic
Source: Stanford CS231
64

Regularization: Summary
• General Idea: do not train a network to achieve too low
training error and high generalization error
• Methods: Disrupt your network and constrain the
flexibility of the model
• Approaches:
- Weight decay (L2,L1)
- Dropout / drop-connect
- Early stopping
- Data augmentation
• Advanced methods:
- Transfer Learning
- add synthesized data using generative models
- add unlabeled data (semi-supervised learning) 65

Regularization: Summary
Semi-supervised:
66
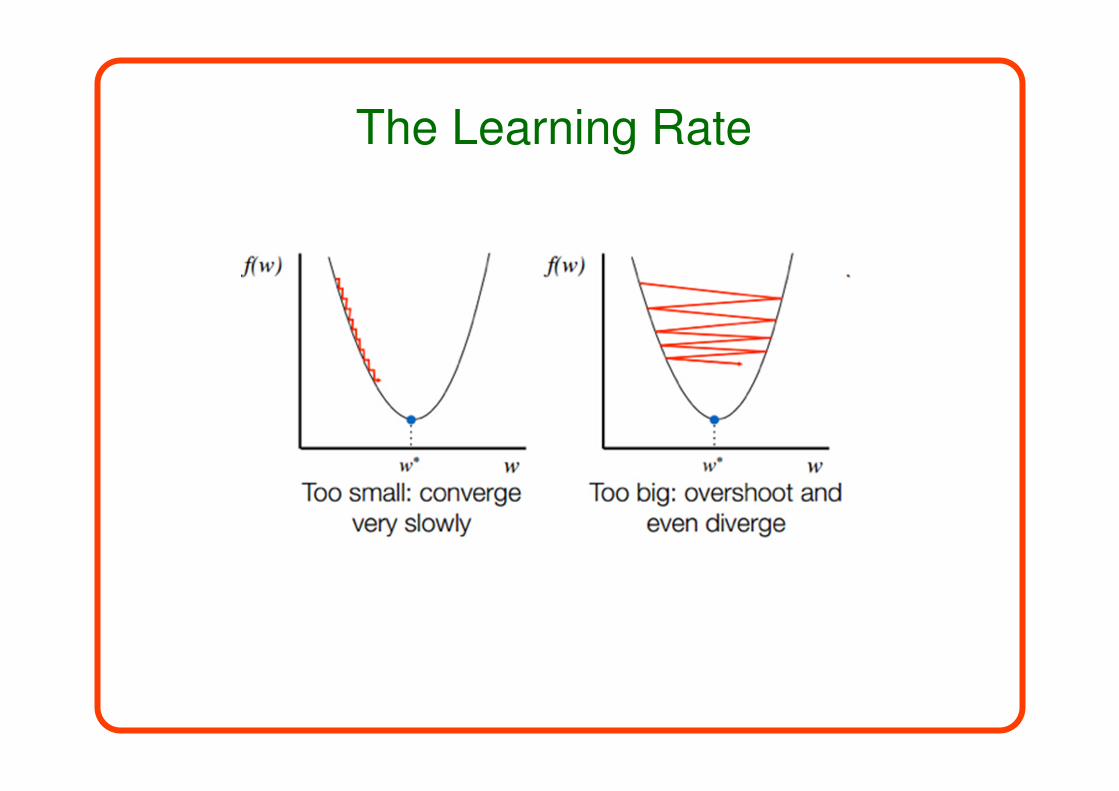
The Learning Rate

Learning Rate
How to choose the learning rate?We already studied several alternatives:
Manual tuning
Rate decay
Momentum
Adaptive learning rates (Adagrad, Adam)

Hyper-parameter Tuning
69

Supervised learning outline
1. Collect data and labels
2. Specify model: select model type, loss
function, hyperparameters
3. Train model: find the parameters of the
model that minimize the empirical loss on
the training data
• What is the right methodology for step 2?
70
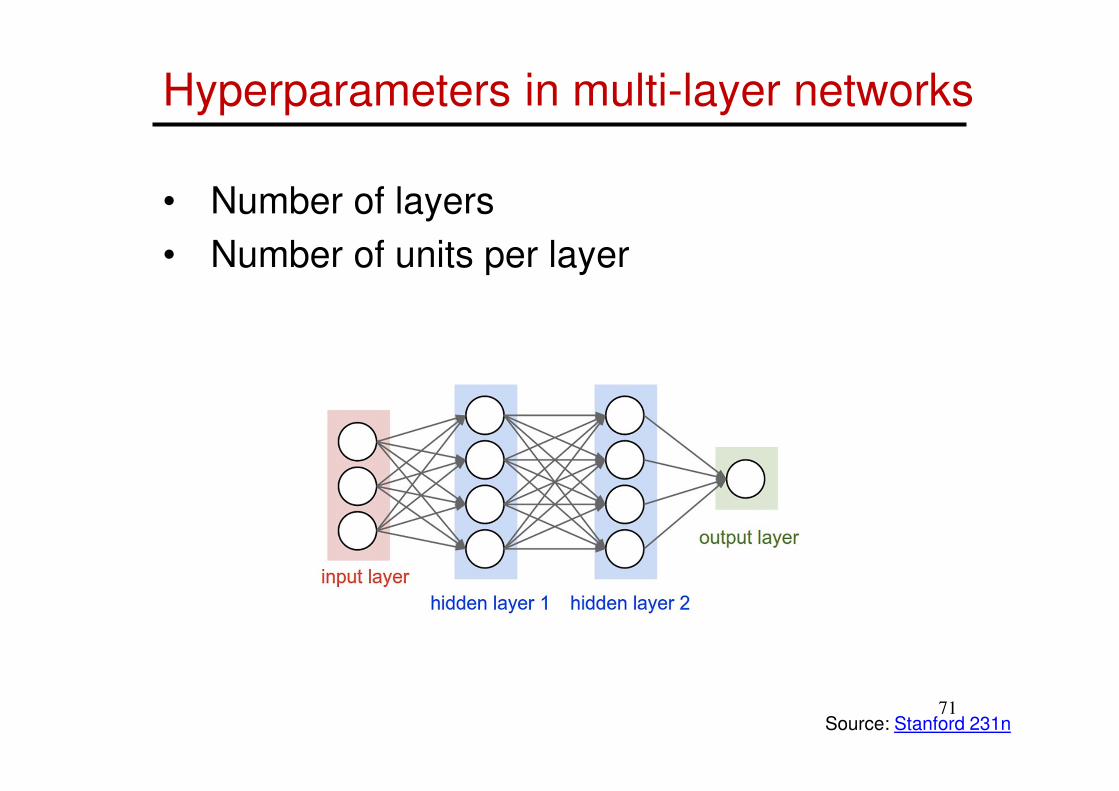
Hyperparameters in multi-layer networks
• Number of layers
• Number of units per layer
Source: Stanford 231n71

Hyperparameters in multi-layer networks
Source: Stanford 231n
Number of hidden units in a two-layer network
72
• Number of layers
• Number of units per layer

Hyperparameters in multi-layer networks
Source: Stanford 231n73
• Number of layers
• Number of units per layer
• Regularization %�, %B, l

Hyperparameters in multi-layer networks
Source: Stanford 231n74
• Number of layers
• Number of units per layer
• Regularization %�, %B, l• SGD: learning rate schedule, number of
epochs, minibatch size, dropout p, etc.
• We can think of our hyperparameter choices
as defining the “complexity” of the model and
controlling its generalization ability
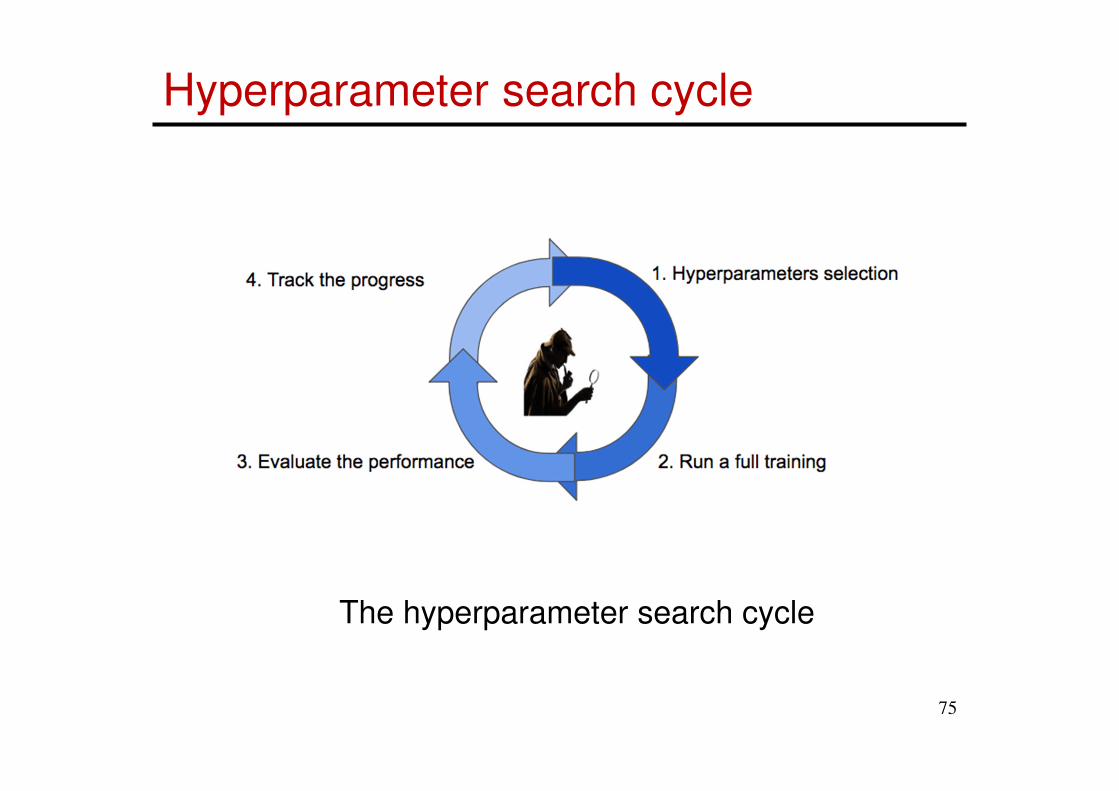
Hyperparameter search cycle
The hyperparameter search cycle
75

Hyperparameter Tuning
• Training set - used to learn the network
parameters (weights, biases)
• Validation set (Dev) – used to perform model
selection and hyper-parameters tuning
• Test set – used to assess the fully trained model
• For deep networks, Dev and Test sets should be a
small fraction of the entire set, as most of the data
is needed for training

Hyperparameter evaluation
• Another possibility of to use the k-fold cross validation
• Training is performed of k-1 folds and evaluated on the
last fold.
• This process is iterated k-times and the final evaluation is
the average of the k-results
• This technique is less common when the training process
is too long
77

Hyperparameter search
• Grid search is a traditional technique for implementing
hyperparameters. It brute forces all combinations.
• Grid search suffers from the curse of dimensionality if
data is of high dimensional space.
• Random search randomly samples the search space. It
explores more samples at each axis. Especially useful if
one axis is more important than the others.
78
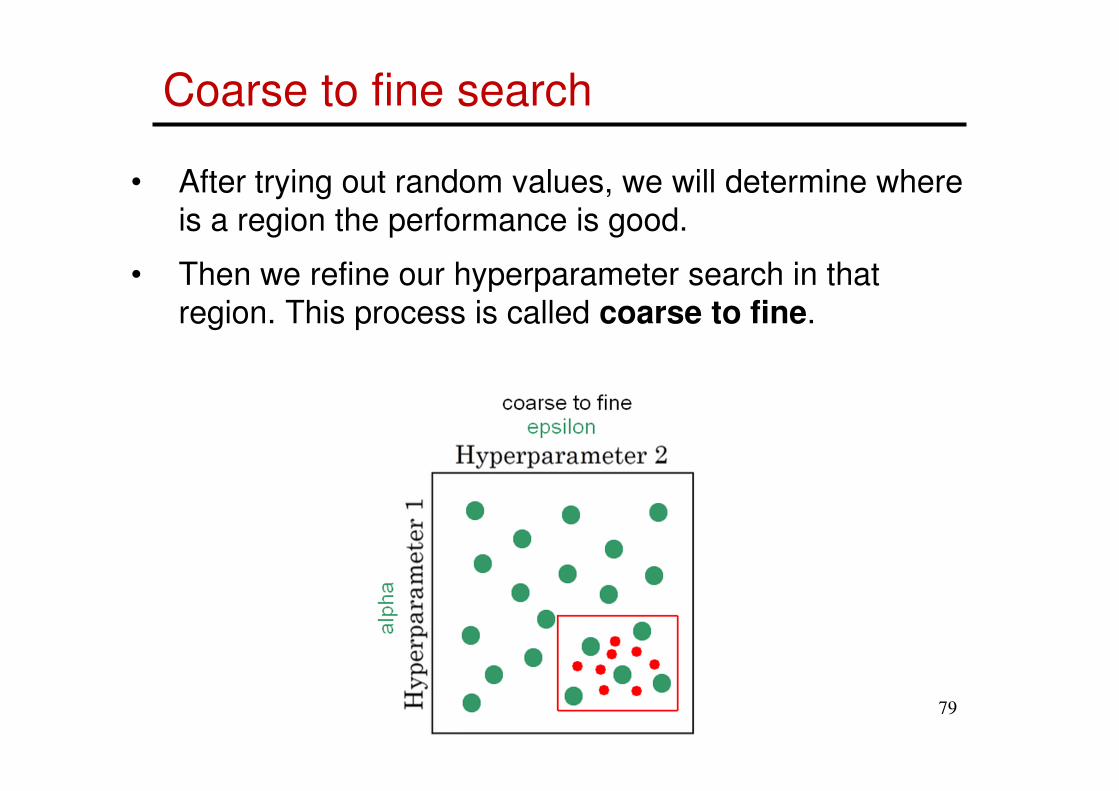
Coarse to fine search
• After trying out random values, we will determine where
is a region the performance is good.
• Then we refine our hyperparameter search in that
region. This process is called coarse to fine.
79

Log Scale Search
• Some hyper-parameters, such as, learning rate and
regularization strength, have multiplicative effects on the
training dynamics.
• Adding 0.01 to a learning rate has huge effects on the
dynamics if the learning rate is 0.001, but nearly no
effect if the learning rate when it is 10.
• For such hyperparameters search on log scale:
m��m�>�u&��� 10 ∗∗ uniform −4,0
0.0001 0.001 0.01 0.1 1.0
80
Bias vs. Variance
81

Bias vs Variance
• Supervised learning: � 4��� is unknown
• Find a model 4k that approximates 4: 4k { 4• End goal: 4k should achieve a low predictive error on
unseen data
• Underfitting: 4k is not flexible enough to approximate 4.
• Overfitting: 4k fits the training set noise
Under fitting Overfitting 82

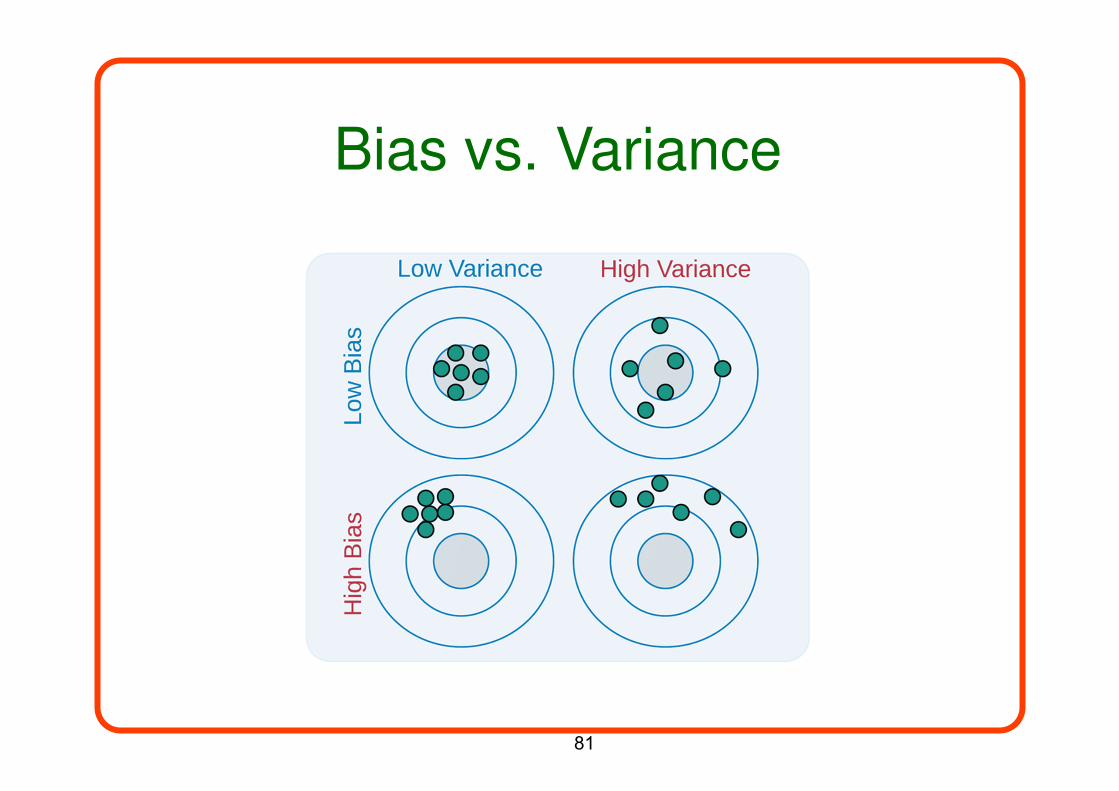
Bias vs Variance
• Bias: error due to simplifying model assumptions
• Variance: error due to randomness of training set
• The tradeoff between these components is determined
by the complexity of the model and the amount of
training data
• Generalization Error of 4k 7>�JB � M�\>��|�
High bias, low variance Low bias, high variance83

Bias vs Variance
• Bias: error term that tells you, on average, how much 4k } 4• Variance: tells you how much 4k is inconsistent over different
training sets.
underfitting
overfitting
84

Bias vs Variance
• Bias: error term that tells you, on average, how much 4k } 4• Variance: tells you how much 4k is inconsistent over different
training sets.
85

Training vs test errors
Training error
Test error
Complexity Low BiasHigh Variance
High BiasLow Variance
Err
or
Source: D. Hoiem
86

Effect of training set size
Source: D. Hoiem
Many training examples
Few training examples
Complexity Low BiasHigh Variance
High BiasLow Variance
Test E
rror
87

Effect of training set size
Source: D. Hoiem
Testing
Training
Number of training examples
Err
or
Generalization gap
Fixed model
88

The ML Recipe
Error
Train 1% 15% 15% 0.5%
Test 11% 10% 30% 1%
High
Variance
High
Bias
High
B&V
Low
B&V
89

The ML Recipe
Error
Train 1% 15% 15% 0.5%
Test 11% 10% 30% 1%
High
Variance
High
Bias
High
B&V
Low
B&V
90
• Training neural networks is still a black magic
• Process requires close “babysitting”
• For many techniques, the reasons why, when, and
whether they work are in active dispute
• Read everything but don’t trust anything
• It all comes down to (principled) trial and error
Training Summary
Source: Illinois CS 498
91
THE END
92


















