Trade-Offs in Sensor Networking · 162 JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 23, NUMBERS 2 and...
10
162 JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 23, NUMBERS 2 AND 3 (2002) A Trade-Offs in Sensor Networking William G. Bath ir defense dominance requires a precise and timely picture of the surrounding air- space that is built using inputs from sensors on many different ships and aircraft. This article examines the sensor networking process in terms of its three primary descriptors: (1) The robustness and capacity of the data distribution process used. (For example, what is the probability of a sent message never being received, and how much data can be sent?); (2) The data grouping approach used. (How are detections grouped in order to know that a particular detection by one unit and another detection by another unit do or do not cor- respond to the same object?); and (3) The data sharing approach used. (Which data are transmitted between units, and how are these data used to calculate network tracks?) INTRODUCTION The Navy generally strives to establish air defense dominance in the regions in which it operates. A pre- condition for air dominance is having a precise and timely picture of the surrounding airspace. This “pic- ture” is a digital representation (position and velocity) of every “piece of metal” in the sky—be that piece an airplane, a helicopter, or a missile. The air picture is essential to air dominance as it allows both the human operators and the computers under their control to sort through all these objects to identify any suspect or hos- tile targets. The air picture is built using inputs from sensors on many different ships and aircraft. Sensor networking is the process of moving these data around and building the picture. A radar receives a reflected signal that is observed as a function of time delay—corresponding to target range. Many of these echoes are collected from different angles, producing a range-angle map of the sur- rounding airspace. Over time, these individual “looks” are collected and combined to make an automatic track (Fig. 1). This process is going on simultaneously on many ships and aircraft and at many different fixed and mobile land sites. Each is using its own sensors to attempt to create the best possible air picture. In an ideal world, each sensor could track every target continuously (e.g., from takeoff to landing, without interruption). How- ever, in the difficult environment we face, the laws of physics do not permit this. Target fades, terrain block- age, and spurious signals from the natural environment or from countermeasures all conspire to make the situ- ation not ideal. As a result, in general, no single ship, aircraft, or land unit can create a complete air defense picture. Unfortunately, while advances in sensor and com- puting power greatly improved what could be done automatically on a single ship or aircraft, on the whole, the networking systems have not kept pace.
Transcript of Trade-Offs in Sensor Networking · 162 JOHNS HOPKINS APL TECHNICAL DIGEST, VOLUME 23, NUMBERS 2 and...

162 JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002)
W. G. BATH
A
Trade-OffsinSensorNetworking
William G. Bath
irdefensedominancerequiresapreciseandtimelypictureofthesurroundingair-space that is built using inputs from sensors onmanydifferent ships and aircraft.Thisarticleexaminesthesensornetworkingprocessintermsofitsthreeprimarydescriptors:(1)Therobustnessandcapacityofthedatadistributionprocessused.(Forexample,whatistheprobabilityofasentmessageneverbeingreceived,andhowmuchdatacanbesent?);(2)Thedatagroupingapproachused.(Howaredetectionsgroupedinordertoknowthataparticulardetectionbyoneunitandanotherdetectionbyanotherunitdoordonotcor-respondtothesameobject?);and(3)Thedatasharingapproachused.(Whichdataaretransmittedbetweenunits,andhowarethesedatausedtocalculatenetworktracks?)
INTRODUCTION The Navy generally strives to establish air defense
dominanceintheregionsinwhichitoperates.Apre-condition for air dominance is having a precise andtimely picture of the surrounding airspace. This “pic-ture”isadigitalrepresentation(positionandvelocity)ofevery“pieceofmetal”inthesky—bethatpieceanairplane, a helicopter, or a missile. The air picture isessentialtoairdominanceasitallowsboththehumanoperatorsandthecomputersundertheircontroltosortthroughalltheseobjectstoidentifyanysuspectorhos-tiletargets.
Theairpictureisbuiltusinginputsfromsensorsonmanydifferentshipsandaircraft.Sensornetworkingistheprocessofmovingthesedataaroundandbuildingthe picture. A radar receives a reflected signal that isobservedasafunctionoftimedelay—correspondingtotarget range.Manyof theseechoesarecollected fromdifferentangles,producingarange-anglemapofthesur-roundingairspace.Overtime,theseindividual“looks”
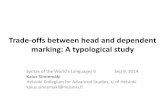
arecollectedandcombinedtomakeanautomatictrack(Fig.1).
This process is going on simultaneously on manyshipsandaircraftandatmanydifferentfixedandmobileland sites.Each isusing itsownsensors toattempt tocreate thebestpossible air picture. In an idealworld,eachsensorcouldtrackeverytargetcontinuously(e.g.,from takeoff to landing, without interruption). How-ever, inthedifficultenvironmentweface,thelawsofphysicsdonotpermitthis.Targetfades,terrainblock-age,andspurioussignalsfromthenaturalenvironmentorfromcountermeasuresallconspiretomakethesitu-ationnotideal.Asaresult, ingeneral,nosingleship,aircraft,orlandunitcancreateacompleteairdefensepicture.
Unfortunately,whileadvancesinsensorandcom-puting power greatly improved what could be doneautomatically on a single ship or aircraft, on thewhole, the networking systems have not kept pace.

JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002) 163
TRADE-OFFS IN SENSOR NETWORKING
Whentheseincompletepicturesarecombinedthroughtoday’s tactical data links, considerable confusionresults—including miscorrelations of data and ensu-ingdangerousmisidentificationsoftargets.Thusthereisnowconsiderablediscussionwithin theNavyand,indeed,throughouttheDoD,astohowbesttoimprovethenetworkingofsensors.Thisarticlediscussessomeof the trade-offs inherent in different approaches tosolvingtheproblem.
THE THEORY OF RADAR TRACKING Tounderstandthetrade-offsinsensornetworkingit
isnecessarytodelveintothebasictheoryoftracking.Thistheoryisrelativelywelldeveloped,havingbegunduringWorldWarII inthe1940sandbeingthesub-jectofthousandsoftechnicalpapersanddissertationssince.Eachsensormakesadigitaldetectionwhenthereceived signal exceeds a threshold. The essence oftheproblemisthatfrequentlyeachsensor’sdetections,such as those in Fig. 1, are anonymous. That is, to afirst approximation, the detections look alike, regard-lessofwhattargettheycorrespondto.Thetrackingpro-cessconsistsfirstofassociation—theprocessofgroupingtogetherdetectionsthatarebelievedtocorrespondtothesametarget—andthenfiltering—theprocessofcal-culatingthetrackstate(estimatedpositionandveloc-ity of the target)—and finally prediction—the processofextrapolating.These threeprocesses interact recur-sively.FirstonegroupstogetherNdetectionsandcal-culatesatrackstate.Thenoneusesthattrackstateasthe basis for associating the N 1st detection withthegroup.Becausethedetectionsareanonymous,thegroupingisbasedlargelyonthemeasuredpositionsofthedetections.
Tracking works well when oneknows in advance that the targetsare sufficiently far apart fromeachother that detections from onetargetarenotconfusedwith thosefrom another. When targets areclose and detections do get con-fused, many serious tracking prob-lemscanresult.Foronething,thetracks may be pulled off onto fic-titiouspositionsor assume inaccu-rate velocities. This then corruptstheassociationprocessonthenextopportunity—potentially resultinginmoreerroneousassociations.Theoutcomesofthesetypesoferrorsfallintocertainwell-knowncategories.Trackswapsoccurwhentwotracksessentially swap their streams ofdetectionssothattrack#1assumesthe position of track #2 and vice
Figure 1. The tracking process examines anonymous automatic detections (b), collected over time (c), and produces tracks (d, e).
versa (Fig. 1). This may seem innocuous, but it is aseriousmilitaryproblem.Forexample,iftrack#1hadbeenassessedasfriendly/neutralandtrack#2hadbeenassessedashostile,thentrack#2couldbeengagedbyshootingatitwithsurface-to-airorair-to-airmissiles.Ifthemeasurementstreamsswapaftertheassessmentofidentity,thenthesurface-to-airorair-to-airmissilewill be fired at and guided to the wrong (friendly/neutral)targetposition.Theresultcouldbethekill-ingof innocentor friendlypeople. Inaddition, sincethemissilewillnotbefiredatatracktaggedasfriendly/neutral, the truly hostile target is not engaged. Thiscan result indirectly in further damage or loss of lifeamongfriendlyforces.
Onecouldtrytoeliminatetrackswapsbymakingcorrelationcriteriaverystrict,thatis,byusinganalgo-rithm that will not group detections together unlesstheyareveryclosetoacommontrajectory.Unfortu-nately, this results in a second type of error called adual track. This is the erroneous representation of asingletargetbytwotracksinsteadofone,whichoccurswhenthedesignovercompensatesfortryingtopreventthetrackswapdescribedabove.Ifthecorrelationcrite-riaaremadeundulystrict,thenasinglegroupofdetec-tions froma single targetcanbeerroneouslydividedintotwogroupscorrespondingtotwodifferenttracks.Dualtracksproducelessseriousbutstillharmfuleffectsinairbattlemanagement.Oneofthemostimportantis that they tend to undermine the confidence ofhumanoperators in the air picture. (Operatorsoftenknowfromothersourcesthatonlyoneairplaneispres-ent, sowhyarethecomputerstellingthemtherearetwo?)Anotherimportantharmfuleffectisdualengage-ments—launching two salvos of missiles when onlyoneisneeded.
(a) Radar video (analog) (b) Automatic detections(anonymous)
(c) Automatic detections overtime (throughout network)
Detectionthreshold
Vid
eo a
mpl
itude
Vid
eo a
mpl
itude
Detectionthreshold
Range
Range
Differentangle
(d) Automatic tracks (correct) (e) Automatic tracks (incorrect)
TimelapseTimelapse

164 JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002)
W. G. BATH
thesystemmusttracktargetsperformingnomorethanaspecifiednumberofg’s).
The process of calculating an estimate, X(k|k), ofx(tk) given all measurements {y1,…,yk} is done recur-sively usingX(k|k1), the estimate ofx(tk) given allmeasurements{y1,...,yk1}:
X(k|k)=X(k|k1)Kk{ykf [X(k|k1)]} (4)
and
X(k1|k)=kX(k|k)k , (5)
whereKkisthegainmatrix,andthemultiplicationbyk hastheeffectofmovingtheestimateforwardintimefrom tk1 to tk. The most general method for deter-miningthegainmatrixistheKalmanfilterprocess1inwhichmaneuversaremodeledasarandomwalk.How-ever, other less general methods also exist for deter-ministic maneuvers.2,3 Although shown here for sim-plicityinCartesiancoordinates,theupdatemayalsobedoneinthemeasurementcoordinates.4Thetermkisadeterministiccorrection foranyknownacceleration(e.g.,accelerationofgravityorCoriollisaccelerationforballisticobjects).Ingeneral,thetrackstate,x(tk),andtheestimates,X(k|k)andX(k|k1),arevectors.Asix-dimensionalvectorisusedforpositionandvelocityinthreedimensions,andanine-dimensionalvectorisusedforcaseswhereinstantaneousaccelerationisalsoesti-mated.Equation4representstheupdateofthefilteredtrackstatewithanewmeasurement.Theseappearonagraphasdiscontinuities,suchasareseeninFig.2.Equa-tion5representstheextrapolationofthetracktothetimeofthenextanticipatedmeasurement.Forthecasewhereonlypositionandvelocity arebeingestimated,thesearethestraightlinesinFig.2.
Since the measurements are anonymous, each onemustbeassessedandadecisionmadeastowhetheritbelongstoeachexistingtrack.Boththemeasurementand the predicted track states have regions of uncer-tainty (ROUs) that contain the true target positionwithsomestatisticalconfidence,say99%.Ameasure-mentisacandidateforgroupingintoatrackwhentheseROUs overlap, as shown in Fig. 2. The measurementROUissimplyproportionaltothemeasurementaccu-racy.The extrapolated track stateROUhas a covari-ance term, Cov(k1/k), which includes the effect oftheaccuraciesofallpreviousmeasurements, thegainsused,andthedegreeofextrapolation. Italsocontainsa lag term, Lag(k1/k), due to biases created by anypotentialmaneuver:
ROU(k1/k)=Lag(k1/k)2.6Cov(k1/k) .
Topreventthetrackswapsanddualsdescribedpre-viouslyand inFig.2, theseassociationdecisionsmust
Therearemanydifferentvariationsontheseerrors,whichwillnotbediscussedhere.Needless to say, thenameofthegameistopreventmistakesingroupingthedetectionstoformtracks.Thetrackingsystemoptimizesthisgroupingprocessbycalculatingthemostaccuratetrack state possible and by making the best possibleassociationdecisions.Awell-knowntheoreticalframe-workexistsforgroupingmeasurementsintotracks.Letthetruetargetpositionasafunctionoftimebegivenbythefunctionx(t).Agivensensorwillmakeameasure-mentykattimetk:
yk=f(xk)nk , (1)
where nk is an independent stream of measurementerrorswithcovariancematrixR,and f() isthefunctionwhichdetermines themeasurement coordinate frame.Thefilteringprocessthatestimatesthetruetargetposi-tionandvelocity is basedona classicalKalmanfilterformulation in which the target state is position andvelocityandthetargetmotionismodeledaslinear.Forexample,
Xk
k
k
k
k
k
k
x t
x t
y t
y t
z t
z t
(model)
target position at timetarget velocity at timetarget position at timetarget velocity at timetarget position at timetarget velocity at time
.=
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
(2)
The modeled target state at time tk evolves in timeaccordingto
Xk 1(model)=kXk(model)wk . (3)
The transition matrix k represents linear motion.Thevectorwkrepresentsmaneuvers—deviationsofthetarget from a straight line. Generally these are turns,changes in speed, or changes in altitude rate havinganyofanuncountablenumberofshapes.Examplesarethe brief portions of a sinusoid (constant rate turn orcourse), jinks or a sustained sinusoid (evasive targetexecutingaweave),andaparabola(constantlongitu-dinalaccelerationtypicalofspeedchanges).Themax-imum sustained maneuver level or “g level” is deter-minedbythedensityoftheatmosphereaswellastheshape,speed,andconstructionofthetarget.Generallyahumanpilotcannotwithstandmuchmorethanseveralg’s, sothis limitswhatamannedaircraftcando.Mis-silescanhavehigherlimitsbeforetheybecomeunstableor fail structurally.Mostmilitary systems are specifiedfor somemaximumg levelbasedonthese limits(e.g.,

JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002) 165
TRADE-OFFS IN SENSOR NETWORKING
haveaveryreliablebackboneinfrastructureforinter-connectingthecells.Datadistributionbetweenmobileplatformsinamilitarytheater(e.g.,ship-to-ship,ship-to-air)isconsiderablydifferentbecausenosuchestab-lished infrastructure exists. (Or if there is an infra-structure and it is still intact, it may belong to theenemy and be unavailable.) Denied this infrastruc-ture,datadistributionisaccomplishedbyanetworkofradiocommunications.Unitsareoftenatthebound-aryofreliablecommunicationsfromafadingor jam-mingperspective.Thus,robustnessofdatadistributionisnotguaranteedandbecomesastrongdriverofover-allsystemperformance.
Forsimplicity,characterizetherobustnessofthedatadistributionbyasinglenumber—theprobabilityofmes-sage loss.Not surprisingly, if one is looking for a cer-taintyof99%containmentofthetrackingerrors,thenoneneedsaprobabilityofmessage loss somewhat lessthan 100% minus this number. Figure 3 shows theincreaseofthetrackROUastheprobabilityofmessagelossincreases.Somethinginthe.1to1%rangeisclearlyneedediftheradiosarenottobethelimitingfactorintrackingquality.
Unfortunately,manyoftoday’smilitarydatadistribu-tionsystemsarenotthisrobust.Sensornetworkingsys-temsgenerallyrequiresomesortofimprovementtotheexistingdatadistributionprocess.APLhasbeeninstru-mental in two such improvements: the developmentof robusthigh-frequency/ultra-high-frequencycommu-nicationsusingMulti-frequencyLink-11andthedevel-opmentofrobustmicrowavecommunicationsusingtheCooperativeEngagementCapability.
Againforsimplicity,characterizethecapacityofthedatadistributionbyasinglenumber—theupdaterateoftracks.Ingeneral,theamountofdatathatneedstobenetworkedisontheorderof(thenumberoftracks)(thenumberofbitsinamessage)(therateatwhichthemessagesaresentpertrack).
The number of tracks is an independent variabledeterminedbytheenvironment.Thenumberofbitsinthemessagewillbediscussed later,but is likelyontheorderofafewhundred.Ifoneviewsthesetwonumbersasfixed,thentheeffectsofdatadistributioncapacitycanbeseeninthetrackupdaterate.Considerasensorthatmakesmeasurementsevery2s. Ifonehadthecapacitytotransmitsomesortofmessageimmediatelyfollowingeach update, then the maximum time any user wouldhavetoextrapolatethetrackwouldbethe2suntilthenext measurement. If one can only update track dataevery12s,thenthemaximumextrapolationtimewouldbe14s.ThesensitivityoftrackROUtothisextrapola-tiondependsonthedegreetowhichthetargetcouldbemaneuvering(e.g.,isthereatleasta1%chanceofthis?).For example, inFig.4,weconsidermeasurements thatarerelativelyinaccurate—1200ft.Thiswouldlikelybealong-rangeanglecase.Herethedifferencebetweena2-s
Pos
ition
Filter extrapolationFilter updateMeasurementsRegion of uncertainty
Time Now
Overlapindicatesassociationcandidate
Figure 2. An expanded view of the tracking process shows the three main functions.
becorrect.ThebestapproachtomakingthemcorrectistokeepthistrackROU,ROU(k1/k),assmallaspos-sible.Thisreducesthechancethatmeasurementsfromadifferenttargetwillbegroupedintothetrackacciden-tally.Further,withthesmallROU,dualsarereducedbecausethedesignerisnottemptedtouseoverlystrictgroupingcriteria.
ALTERNATIVES FOR SENSOR NETWORKING
Althoughsensornetworkingisacomplexandmulti-facetedproblem,therearethreeprimarydescriptorsofasensornetworkingsystem.
1. Therobustnessandcapacityofthedatadistri-butionprocessused.(Forexample,whatistheprobability that a sent message will never bereceived,andhowmuchdatacanbesent?)
2. The data grouping approach used. (How aredetections grouped in order to know that aparticular detection by one unit and anotherdetectionbyanotherunitdoordonotcorre-spondtothesameobject?)
3. Thedatasharingapproachused.(Whichdataaretransmittedbetweenunits,andhowarethedatausedtocalculatenetworktracks?)
These descriptors and the fundamental trade-offsbetweendifferentdesignapproachesaredetailednext.
Data Distribution In our personal dealings with computers we are
used to relatively reliable distribution of data (e.g.,over local area networks, the Internet, etc.). Thesesorts of data distribution generally have a communi-cationsmediaoverestablishedinfrastructure—copperwires, fiber-optic cables, fixed point-to-point micro-waverelay,etc.Evencellularphones,whilepotentiallyof lowquality from thehandset to the cell antenna,

166 JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002)
W. G. BATH
and14-sextrapolation isabout3 to1. Ifoneconsidersdata thataremoreaccuratetobeginwith,suchas30ft,thenthisratiogrowsto5to1.Clearly,ineithercase,thecapacityofthedatadistributionequipmentgreatlyaffectstheaccuracyofsensornetworking.
Data GroupingDatagrouping iskeybecause,aspreviouslydiscussed, themost serious
sensor networking errors can result from mistaken grouping of the data.Therearetwobasicdatagroupingapproaches(Fig.5):
1. Measurement-to-track associationassociateseachmeasurementtothenet-workedtrackpotentiallycalculatedusingmeasurementsfromallsensors.Thustheentirestreamofmeasurements(uptothepresent)ispotentiallyavailabletocalculatethetrackstateusedforthedecisiononthemostrecentmeasurement.
2. Track-to-track associationassociateseachmeasurementtoasinglesensortrack state calculated using only measurements from that sensor. The
singlesensortrackstatesarethengroupedwitheachothertopro-duceanettedtrackstate.
Thedesigndecisionastowhichapproachisbetterforgroupingdatadependsonthesensorsandtargetsinvolved.Onecasewheremeasure-ment-to-trackassociationisclearlybetter is when the sensors have areducedprobabilityofdetectionsotherearepotentialgapsinthedatastreamor thedata streamis sparseforaperiodoftime.Inthesecases,amuchmoreaccuratetrackstatecanbe calculated using multiple datastreamsthanusingonlyone,asmul-tiplestreamswilltendtofillinthegapsindetectionandrestoreahigh,consistentdata rateduringperiodsofreducedprobabilityofdetection.Figure6illustratesthesensitivitytotargetfadesbyplottingtrackROUversus probability of detection forsinglesensortrackingandmultiplesensor tracking. When the proba-bilityofdetectionismuchlessthanunity,themultisensortrackiscon-siderably more accurate since theprobabilityofasignificantoutageofdataismuchreducediftwosourcesare available. With a more accu-ratetrack,tighterassociationcrite-ria can be used for measurements.However, if the biases cannot beeffectivelyremoved,thentheremaybe an advantage to associating toa single sensor track, which bydefinition is unbiased with respectto itself. If biases cannot be keptsmaller than the ROU, then atthehighprobabilitiesofdetection,onewouldprefersinglesensorasso-ciation followed by track-to-trackassociation.
Another variant of this occurswhen combiningdata froma highdata rate sensorwith those fromalow data rate sensor. The nettedtrack, becauseof itshigherupdaterate, will provide a much moreaccurate basis for data associationthanthelowupdatesensoralone.Acommonexampleofthisisthecom-binationofdatafromalowupdaterateairborneearlywarning(AEW)
104
103
10–3 10–2 10–1
Probability of message loss
Trac
k R
OU
(ft)
with
99%
con
tain
men
t Network update period = 12 s
Network update period = 2 s
Figure 3. The importance of data distribution robustness is shown. ROU increases sharply when the probability of message loss exceeds .01.
Figure 4. The importance of data distribution capacity is shown by ROU sensitivity to time latency (target max. maneuver = 1, 2, 3 g ; probability of detection = .8).
11gg
22gg
33gg105
103
104
0 5 10 15 20 25
Maximum latency from update (s)
Trac
k R
OU
(ft)
with
99%
con
tain
men
t

JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002) 167
TRADE-OFFS IN SENSOR NETWORKING
sensor with a higher update rate surface-based fire control radar. If oneusestrack-to-trackassociation,thentheAEWsensorisonitsownfordataassociation.Becausethedatarate is low,theROUis relatively largeandtherecanbesignificantchancesthatthetrackuncertaintywillencompassadetectionfromanotherobject.Thispotentiallyleadstotrackandidenti-ficationswaps.Ifoneusesmeasurement-to-trackassociation,thentheAEWsensormeasurementsareassociatedtoatrackthatcontainsthehighupdaterate measurements from the fire control sensor. As a result, the ROU ismuchsmaller,andthelikelihoodofatrackor identificationswapcanbereducedbyanorderofmagnitudeormore.
Finally, measurement-to-track association can actually increase thenumber of measurements available to the tracking process. In general,trackformationrequiresaverylowmeasurementfalsealarmrate,whereastrackingcanproceedwitha somewhathigher falsealarmrate.Thus the
detectionthreshold(Fig.1)canbereduced at one sensor if anothersensorhasthetargetintrack.Fur-ther, if the sensors can managetheirenergy,thenadditionalenergycan be used in the direction ofknown tracks. Both these factorscan increase the number of mea-surements that a sensor is able toputintothenetwork.
Data Sharing Therearetwobasicdatasharing
approaches,bothbasedonthetrack-ingtheoryalreadydescribed:
1. Measurement fusioncombinesthemeasurement streams from allsensorstoproduceasinglecom-positemeasurementstream.Thiscomposite measurement streamis then filtered using Eqs. 4and5.
2. Track fusion pre-filters the databefore sending them.ThusEqs.4and5areappliedrecursivelytoasequenceofsinglesensormea-surementspriortotransmission.Therecipientthencombinesthetracks (for example a weightedcombination5 with the weightsbasedontherelativesizeofthecovariancePk).Trackfusionhassomeinterestingvariants.
• Track selection is a verysimpleanddatarateefficientlogicwhichhasbeenusedintoday’s widely deployed net-workingsystems(e.g.,Link-11and Link-16). A commondecision is reached amongall units as to which unithas the best single sensortrack.Thenonlythistrackistransmitted.Thisselectionisknownas reporting responsi-bility. Each unit in the net-work (except for the onewithreportingresponsibility)thenhastwotrackstochoosefrom—its local one and the“best”remoteone.
• Trackletfusion6pre-filtersthedatabeforesendingthem,thenfilters them again on recep-tion. Thus Eqs. 4 and 5 are
Pos
ition
Pos
ition
Pos
ition
Pos
ition
Time Time
Time Time
Measurement-to-track:single track formed
Track-to-track:multiple tracksformed thencorrelated
1600
1400
1200
1000
800
600
400
200
0
RO
U (
ft)
.5 .6 .7 .8 .9 1.0
Measurement-to-track
Probability of detection, Pd
Measurement-to-track
TTrracack-to-trk-to-tracackk
Figure 5. Two data grouping approaches.
Figure 6. Comparison of measurement-to-track and track-to-track association. For fading targets (Pd < 1), measurement-to-track is preferred. For large sensor biases and nonfad-ing targets, track-to-track is preferred. (Second sensor biases = 0, 100, 200, and 300 ft, respectively, for measurement-to-track curves going from bottom to top.)

168 JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002)
W. G. BATH
applied recursively to asequence of single sensormeasurementsprior to trans-mission, producing a streamof tracklets emanating fromeachsite.Therecipientthencombines the streamsof sin-gle sensor tracklets into acompositestreamoftrackletsand applies Eqs. 4 and 5 tothe composite sequence of{X(k|k)}. To ensure that theinput to the second filteringprocess is statistically inde-pendent, the first filteringis either over disjoint setsof measurements or is pre-whiteneduponreception.
These approaches tend to besimilar when the target is knownwithcertaintytonotbeaccelerat-ing.However,whenone isuncer-tainaboutthelevelofmaneuverthetarget is currently performing, sig-nificant differences between mea-surementfusionandtrack(ortrack-let)fusionexist.Thisisbecauseasmoresensorsarecombinedthroughmeasurement fusion, the lags aresignificantlyreduced.Thereductionwhen more sensors are combinedthrough track or tracklet fusion isconsiderablyless.Toillustratethispoint,takeaverysimplecasecon-sisting of a single tracking filter.Thefiltergainis
KTk =
⎡
⎣⎢
⎤
⎦⎥
/,
Figure 7. Comparison of data sharing approaches. (a) For air-breathing targets, mea-surement sharing produces the smallest ROU. (b) For exo-atmospheric motion, the ROUs are similar. (For parts a and b, sensor accuracy = 1200 ft, sensor update rate = 2 s, and probability of detection = 1.0; target max. maneuver = 2 g and 0.01 g in a and b, respectively.)
whichisaconstant,andthetermsandaretheposi-tionandvelocitytrackinggains,respectively.
It is well known2 that the steady-state ROU with99%probabilityofcontainmentis
ROU( / ) .( )
.k k RT
+ =+ +− −
+1 2 62 2
4 2
2 2
Usingthisexpression,itispossibletomakesimplecom-parisonsbetweentheaccuracyofmeasurementfusionasopposedtotrackfusion(equalaccuracyisone-dimen-sional).WhentheROUisplottedasafunctionofposi-tion gain, it has the “bathtub” shape shownby thesinglesensorcurveinFig.7a.Theleft-handsideofthe
bathtubisdominatedbythelagcomponent,whiletheright-handsideisdominatedbythecovariancecompo-nent.Sincethegains(horizontalaxis)arethedesigner’schoice,thesinglesensorROUistheminimumofthebathtubcurve.
Nowconsiderthefusionoftwosensorsinaparticu-lardimension.Ifonesensorhasone-tenththeROUoftheother,thenfusionisuninterestingbecausethemoreaccuratesensorwilldominateandessentiallydeterminetheresult.At least in steadystate, it is relativelyeasytoproducethisdominancebyanyofthefusionmeth-ods.Ofmoreinterestisthecasewherethesensorsarecomparableintermsofaccuracyandupdaterate,pro-ducingcomparableROUs.Thiscasemoreclearlyshowsthedifferenceinthefusionmethods.
4000
0
400
1000
1500
2000
2500
3000
3500
Trac
k R
OU
(ft)
0 0.2 0.4 0.6 0.8 1.0Tracking filter gain,
Single sensorTwo sensors: measurement fusionTwo sensors: track fusionTwo sensors: track fusion (messagelength included)
500
600
700
800
900
0 0.2 0.4 0.6 0.8 1.0
Single sensorTwo sensors: measurement fusionTwo sensors: track fusion
(a)
(b)
1000
500
Trac
k R
OU
(ft)
Tracking filter gain,

JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002) 169
TRADE-OFFS IN SENSOR NETWORKING
For example, when two identical sensors arecombined by measurement sharing, the update rate isessentially doubled. This reduces the lag by a factorof4, allowinga smallergain tobe selected(optimiza-tionmoretotheleftofthebathtub)andreducingthecovariance. The net result is the movement from thesinglesensorcurvetothemeasurementsharingcurveinFig.7a.
When two identical sensors are combinedby tracksharing,theupdaterateforeachtrackingprocessdoesnotchange,andsothelagdoesnotchange.However,theoverallcovarianceisreduced,allowingalargergainto be selected (optimization more to the right of thebathtub) and reducing the lag. The net result is themovement from the single sensor curve to the tracksharingcurveinFig.7a.
If any significant maneuver is possible (e.g., if thetargetisanaircraftorcruisemissile),thefactorof4inlag willhave amore significant effect than the factorof2incovariance.Thusonecanseethatthemeasure-ment fusioncurveachievesasignificantly lowermini-mumthanthetrackfusioncurve.Thenumberofsensorscombined amplifies this difference. If maneuvers canbeexcluded(e.g.,exo-atmosphericmotionofan inertobjectsuchasaballisticmissilepartwithnothrusters),thenthefactorof4inlagdoesnothavenearlythesameeffect,andmeasurementandtrackfusionbecomecom-parable forequalmessage lengths(e.g.,Fig.7b,wheretheaccelerationis0.01g).
Tracklets will generally produce results in betweenthose of measurements and tracks. If many measure-mentsarecombinedintoatracklet,thentrackletfusionwillcomparewithsinglesensortrackingastrackfusiondoes. If only one or two measurements are used in
Figure 8. Measurement ellipsoids on uncertainty are very narrow in range dimension. Accurate triangulation requires precise characterization of ellipsoids.
a tracklet, then theywill comparewithsinglesensortrackingasmea-surementfusiondoes.
So far this discussion has cen-tered on which data sharing ap-proach is most accurate. Anotherimportantconsiderationishowwelltheapproachcharacterizestheaccu-racyofthetrack.Inmanyapplica-tions,suchasthegroupingofdata,there is relatively little benefit tohavingamoreaccuratetrackunlessoneknowsexactlyhowaccurateitisineachdimension.
The importance of accuratelyrepresenting the data covarianceandlagsisamplifiedbythephysicsof radar detection. With moderncomponents,onecaneasilybuildaradarthatcanmeasurerangetothetargettoanaccuracyof20ft.How-ever, in themicrowaveband, it is
impossiblewithashipboardoraircraftantennatomea-sureangletoanequivalentprecision.Thusthesensorellipsoidofuncertainty (Fig.8) isverynarrow inonedimension (range) and much wider in the other twodimensions.Whentheviewingdifferenceangleissig-nificant, data fusion essentially triangulates the targetposition to the volume where the ellipsoids overlap.This can produce a factor of 10 or more reductionin ROU. However, knowing the result of this fusionrequiresaverypreciseknowledgeoftheshapeandori-entationoftheellipsoids.Thisisexactlytheinforma-tioncontainedinthecovariancesandlags.
An advantage of measurement fusion is that therecipient, using the measurements, can calculate theROU.Thusitisonlynecessarytosendthecovariancesofthemeasurements.Thiscovariancematrixisdiago-nal,andsocontainstypicallyonlyafewnon-zeronum-bers.Inatrack(ortracklet)fusionsystem,therecipientdoesnotseetheindividualmeasurementsandsoneedsadditionaldatatocalculatetheROU—thetracknoisecovarianceandthelags.
Table1comparestheamountofdatathatmustbesentforthesimpleexampleofthree-dimensionalsen-sors (range, bearing, and elevation). Clearly, updatemessages for track fusion will be significantly longerthanformeasurementfusion.Asaresult,thedatamustbesentlessfrequently.Toreducethetrackfusionmes-sagesize,someapproximationscanbemade.Thelagsand covariances can be combined and the resultingmatrixblockdiagonalized.Thisresultsinasignificantreduction in the fidelity of representing the ROU,butdoespermitthedatatobesentmoreoften.(Sepa-rateaccountingfornoisecovariancesandlagsisimpor-tantbecausetheygrowatdifferentrates.)Averydata

170 JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002)
W. G. BATH
Table 1. How errors are represented in different data sharing approaches. Track selection and measurement fusion gener-ally require the shortest messages.
Networkingapproach Howerrorsarerepresented Whatissent
Measurementfusion Fullrepresentation 6numbers:3measuredcoordinates, 3measurementcovariances
Trackortrackletfusion Fullrepresentation 33numbersa:6filteredcoordinates,21track covariances,6accelerationlags
Downsizedtrackor ROUrepresentationonly;covariance 15numbers:6filteredcoordinates, trackletfusion matrixblockdiagonalized 9“total”trackcovariances
Trackselection ROUrepresentationonly(heavilyand Approx.6numbers:6filteredcoordinates, logarithmicallyquantized) 1ROUindexaThisisforasix-dimensionaltrackstate.Foranine-dimensionaltrackstate,67numbersarerequired.
distributionefficientvariantistrackselection. In this case, the ROUisheavilyquantizedintoanROUindex in a logarithmic fashion. Ifonly a single unit, the one withthehighestROUindex,isallowedtoreportdata,thennetworkingispossibleatvery lowdatadistribu-tionrates.
Whenonediscountstrackfusionfor the additional length of themessages (a factor of 3 increase isassumed), the difference betweenmeasurement and track fusionbecomes more pronounced (tracksharing [message length included]curveinFig.7a).
Anotherconsiderationinselect-ing the data sharing approach ismaintaining an open architecturefor theuserof the system. Ingen-eral, targetdataareused formanydifferent functions in a weaponsystem(e.g., situationalawareness,datacorrelation,interceptorlaunchscheduling,handoverofatargettoan interceptor seeker, etc.). Eachof these functions has differentdatafilteringrequirements.Oneofthe main differences among theserequirements is how heavily thedataaresmoothed(effectively,howsmall is ). Generally very heavysmoothing (small ) is used whenpredicting ahead for a long time(e.g.,schedulingthelaunchtimeofa long-range interceptor). In thiscaseonedeliberatelydiscardsinfor-mation by filtering out much ofthe higher-frequency components
ofthemeasurementspectrum.Conversely,verylightsmoothing(large)isusedwhenpredictingaheadforashorttime(e.g.,associatingdataatthenextmeasurement).Inthiscaseonewantstopreservenearlyallthespectralcontentofthemeasurements.Thedatasharingapproachmayrestrictthetypesoffunctionsthatcanbesupportedwiththenetworkeddata(Fig.9).
Measurement sharing provides the most open architecture because allfunctionscanbesupported(assumingthattheoriginaldataareofsufficientquality). As shown in Fig. 9, the wide spectral content of the measure-ments allowsvariousfilteringprocesses tobeused to achieveanydesiredspectral shape. Tracklets have a narrower spectrum because the higher-frequencycomponentshavebeenessentiallyaveragedout.Aslongastheapplicationneedsasmallerspectrum(i.e.,smootherdata)thanthetrackletitself, the application can be supported. However, applications requiringhighlyresponsivefiltering(largebandwidth)cannotbesupported.Thiscre-atesasomewhatundesirablecouplingbetweentheapplicationdesignandnetworkdesign,inthattheapplicationdesignermayhavetocomebacktothenetworkdesignerandrequestadifferenttrackletformationprocess.
Tracksarenoteasilyrefilteredfordifferentapplications,soatrack-basedsystem provides the least open architecture. Only a single bandwidth oftrack data is available, and this one form of data must be used for any
Figure 9. The type of data shared may restrict the applications for which they can be used. Measurement sharing provides the most open architecture.
Types of datanetworked
Applications supportedby networking
Application
Trackletformation
Spectrum ofmeasurement
Trac
k fo
rmat
ion
Spectrum oftracklets
Spectrum oftrack
Highly responsive filteringfor short-term prediction(cueing, association)
Moderately responsivefiltering for medium-term prediction
Slowly responsive filteringfor long-term prediction
1/t
1/t
1/t

JOHNSHOPKINSAPLTECHNICALDIGEST,VOLUME23,NUMBERS2and3(2002) 171
TRADE-OFFS IN SENSOR NETWORKING
THE AUTHOR
WILLIAM G. (JERRY) BATH received B.E.S., M.S.E., and Ph.D. degrees fromTheJohnsHopkinsUniversityin1974,1975,and1980,respectively.SincejoiningtheLaboratoryin1974,hehasworkedonthesignalprocessing,automation,andintegrationofradarsystemsforNavyships(AN/SYS-1,AN/SYS-2,MK-92CORT,SPS-48CDDC)andtheearlynetworkingofNavyradarsusingtheSurfaceGridlockSystem(SGS/AC).For14years,heledtheengineeringanalysisgroupthatdevel-opedtheconcepts,requirements,andalgorithmsforsensornettingintheCoopera-tiveEngagementCapability.Since1997,Dr.BathhasledtheSensorandWeaponControlIntegrationBranchoftheAirDefenseSystemsDepartment.Hehaspub-lishedover30papersonradarsignalprocessing,tracking,andnetworking.HeisaseniormemberofIEEEandthefirstrecipientoftheIEEEradarsystemspanelawardforoutstandingcontributiontoradar.Hise-mailaddressisjerry.bath@jhuapl.edu.
application.Thiscreatesanevenstrongercouplingofthe network designs, in that now different units withdifferentapplicationsmaycompetewitheachothertohave the network tracking process designed to meettheirneeds.
SUMMARYThe sensor networking process has been examined
intermsofitsthreeprimarydescriptors:(1)therobust-ness and capacity of the data distribution process,(2) the data grouping approach used, and (3) thedata sharing approach used. The sensitivity of trackaccuracy todatadistribution robustnessandcapacityhasbeenexamined.Themeasurement-to-trackgroup-ing approach has been shown to have advantageswhensinglesensorshavetargetdetectionfades,butitismoresensitivetosensorbiases.Thetransmissionof
measurements(vicetracksortracklets)hasbeenshownto be a more efficient use of data distribution band-widthwhentargetsarecapableof significantmaneu-vers.Thetransmissionofmeasurementsalsoprovidesamoreopenarchitecturebygivingtheusermoreoptionsfortailoringthetrackdatatotheapplication.
REFERENCES 1Kalman, R. E., and Bucy, R., “New Results in Linear Filtering and
Prediction,”J. Basic Eng.83D,95–108(1961). 2Benedict,T.R.,andBordner,G.W.,“SynthesisofanOptimalSetof
RadarTrack-While-ScanSmoothingEquations,”IRE Trans. Autom. ControlAC-7(4),27–32(1962).
3Portmann,G.J.,Moore,J.R.,andBath,W.G.,“SeparatedCovari-ance Filtering,” in Proc. 1990 Int. Radar Conf., pp. 456–460 (7–10May1990).
4Castella, F. R., “Multisensor, Multisite Tracking Filter,” IEE Proc. Radar Sonar and Navigation141(2),75–82(Apr1994).
5Gelb,A.,Applied Optimal Estimation,MITPress(1974). 6Blackman,S.,andPopoli,R.,Design and Analysis of Modern Tracking
Systems,Artech(1999).