TRABAJO FIN DE MASTER -...
51
TRABAJO FIN DE M ´ ASTER “Estabilidad y bifurcaci´ on de una viga excitada param´ etricamente: an´ alisis modal de un modelo continuo lineal” Autor: Miguel ´ Angel Lago Hidalgo para finalizar el “M´ aster en Dise˜ no Avanzado en Ingenier´ ıa Mec´ anica” Tutores Dr. Emilio Freire Mac´ ıas. Dpto. de Matem´ atica Aplicada II. Dr. Jorge Gal´ an Vioque. Dpto. de Matem´ atica Aplicada II. Dr. Juan S. Valverde Garc´ ıa. Dpto. de Ingenier´ ıa Mec´ anica y de los Materiales. Universidad de Sevilla Noviembre 2008
Transcript of TRABAJO FIN DE MASTER -...

TRABAJO FIN DE MASTER
“Estabilidad y bifurcacion de una vigaexcitada parametricamente: analisis modal
de un modelo continuo lineal”
Autor:
Miguel Angel Lago Hidalgo
para finalizar el “Master en Diseno Avanzado en Ingenierıa Mecanica”
TutoresDr. Emilio Freire Macıas. Dpto. de Matematica Aplicada II.Dr. Jorge Galan Vioque. Dpto. de Matematica Aplicada II.Dr. Juan S. Valverde Garcıa. Dpto. de Ingenierıa Mecanica y de los Materiales.
Universidad de Sevilla
Noviembre 2008

Para mi familia.

Agradecimientos.
Este trabajo de investigacion no hubiera podido ser posible sin la ayuda de varias personas.
En primer lugar quisiera agradecer al Dr. Jorge Galan su valiosa y constante ayuda du-rante todo el desarrollo del trabajo, aportando ideas y soluciones a los problemas quefueron surgiendo en el mismo. Asimismo, quisiera expresar mi agradecimiento al Dr. JuanS. Valverde por su tiempo y su apoyo especialmente en los momentos iniciales de la investi-gacion, y al Dr. Emilio Freire como tutor de este trabajo fin de master.
Y finalmente, pero no menos importante, agradezco a mis seres queridos su apoyo durantetantos anos. Especialmente a mis padres, cuyo ejemplo llevo siempre por bandera con orgullo.
Indice general
1. Introduccion. 1
1.1. Objetivos del proyecto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Introduccion teorica. 6
2.1. Sistemas dinamicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2. Resonancia parametrica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3. Investigaciones anteriores sobre el “Indian Wire”. 10
3.1. The ‘Indian Rope Trick’ for a parametrically excited flexible rod: linearizedanalysis [12] (El ‘Truco de la Cuerda India’ para una cuerda excitada parametri-camente: analisis linealizado). . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2. The ’Indian Rope Trick’ for a parametrically excited rod: nonlinear and sub-harmonic analysis [14] (El ‘Truco de la Cuerda India’ para una cuerda excitadaparametricamente: analisis no-lineal y subarmonico). . . . . . . . . . . . . . . 11
3.3. The parametrically excited upside-down rod: an elastic jointed pendulummodel [15] (La cuerda excitada parametricamente arriba-abajo: un mode-lo de pendulos con uniones elasticas). . . . . . . . . . . . . . . . . . . . . . . . 12
3.4. The ‘Indian wire Trick’ via parametric excitation: a comparison between theo-ry and experiment [13] (El ‘Truco del Cable Indio’ por medio de una excitacionparametrica: una comparacion entre la teorıa y los experimentos). . . . . . . 14
4. Modelado del “Indian Wire”. 19
4.1. Ecuaciones de los modelos anteriores . . . . . . . . . . . . . . . . . . . . . . . 19
4.1.1. Modelo lineal de Champneys y Fraser. . . . . . . . . . . . . . . . . . . 19
4.1.2. Modelo no-lineal de Champneys y Fraser. . . . . . . . . . . . . . . . . 20
4.1.3. Modelo de N pendulos con rigidez y amortiguamiento. . . . . . . . . . 20
4.2. Modelo dinamico lineal de una viga con amortiguamiento interno. . . . . . . 21
4.2.1. Equilibrio de un elemento diferencial de una viga. . . . . . . . . . . . 22
4.2.2. Efecto de la excitacion armonica sobre las ecuaciones del modelo. . . . 23
4.2.3. Relaciones constitutivas. Modelado del amortiguamiento interno. . . . 24
i

INDICE GENERAL ii
4.2.4. Ecuacion diferencial del movimiento transversal de la viga. . . . . . . 24
4.2.5. Adimensionalizacion de la ecuacion diferencial. . . . . . . . . . . . . . 25
5. Tecnica de solucion aproximada de la ecuacion. 27
5.1. Metodo de Galerkin. Discretizacion espacial. . . . . . . . . . . . . . . . . . . . 28
6. Estudio de la estabilidad de la solucion recta. 31
6.1. Metodo numerico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6.2. Parametros de continuacion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.3. Eleccion de los parametros para reproducir los experimentos de Mullin. . . . 32
6.3.1. Eleccion del parametro σ. Ajuste de la longitud crıtica de pandeo estatico. 32
6.3.2. Eleccion del numero de modos y del parametro γ. Ajuste del diagramade bifurcacion frecuencia-longitud de los experimentos de Mullin. . . . 33
6.4. Maxima longitud del “Indian Wire” que es posible estabilizar. . . . . . . . . . 37
6.4.1. Efecto de la variacion de la amplitud de vibracion. . . . . . . . . . . . 37
6.4.2. Efecto de la variacion del area de la seccion transversal de la viga. . . 38
6.4.3. Efecto de la variacion del coeficiente de amortiguamiento del material. 39
6.5. Desestabilizacion del “Indian Wire” a longitudes subcrıticas. . . . . . . . . . 40
7. Conclusiones y recomendaciones para futuras investigaciones. 41
Indice de figuras
1.1. Diagrama frecuencia-amplitud que muestra las regiones de estabilidad e in-estabilidad predichas por el teorema de Acheson para una configuracion detres pendulos unidos en la posicion invertida, ası como los modos de desesta-bilizacion del equilibrio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Viga de aluminio unida a una maquina de coser con un tornillo (Levi yWeckesser). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3. Pendulo triple de 50 cm. en la posicion invertida, cuyo punto de suspensionvibra con una amplitud de 2 cm. y una frecuencia de 40 Hz. Se observa que lacadena de pendulos retorna a la posicion vertical tras una perturbacion inicialsevera. “Not quite the Indian Rope Trick”. Acheson y Mullin. . . . . . . . . . 3
3.1. Datos experimentales y la “franja inferior” de la teorıa simple. . . . . . . . . 15
3.2. Demostracion experimental de Mullin: (a) el cable pandeado; (b) el cablevertical estabilizado; (c) movimiento de inclinacion cerca de la inestabilidadde “caıda” a baja frecuencia; y (d) movimiento cerca de la frecuencia superiorde la inestabilidad dinamica. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3. Resultados numericos del modelo discreto de pendulos para N=16. . . . . . . 17
4.1. Modelo fısico del sistema. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.2. Equilibrio de un elemento diferencial de una viga que vibra en direcciontransversal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.1. Diagrama de bifurcacion del modelo. ∆ = 0,011 m. γ = 0,0125. σ = 0,212. . . 35
6.2. Resultados experimentales vs. diagrama de bifurcacion del modelo . . . . . . 36
6.3. Diagrama de bifurcacion del modelo. ∆ = 0,005 m. γ = 0,0125. σ = 0,212. . . 39
6.4. Diagrama de bifurcacion ampliado para longitudes subcrıticas. ∆ = 0,011 m.γ = 0,0125. σ = 0,212. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
iii

Indice de Tablas
6.1. Efecto de la amplitud sobre la region de estabilizacion. γ = 0,0125. σ = 0,212 38
6.2. Efecto de la variacion de la seccion transversal sobre la region de estabilizacion.∆ = 0,011 m. γ = 0,0125 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.3. Efecto de la variacion del coeficiente de amortiguamiento interno sobre laregion de estabilizacion. ∆ = 0,011 m. σ = 0,212 . . . . . . . . . . . . . . . . 39
iv

Capıtulo 1
Introduccion.
Desde hace muchos anos se conoce el fenomeno por el cual una columna muy esbelta colocadaen posicion vertical puede llegar a pandear por su propio peso al exceder una determinadalongitud crıtica, por efecto de la gravedad. En 1881, el investigador Alfred G. Greenhill [1]estudio la mayor longitud que un cilindro podıa alcanzar antes de que se doblara por supropio peso, determinando por ejemplo la maxima longitud que podıa tener una pertiga desalto, o la maxima altura a la que podıa crecer un arbol de unas proporciones dadas.
Los fenomenos que desafıan la gravedad han cautivado a muchos investigadores desde prin-cipios del siglo pasado, los cuales han tratado de explicar desde un punto de vista cientıficoalgunos “trucos” que parecen tener un origen “magico”.
En 1908 Stephenson [2], utilizando las leyes de Newton, demostro que es posible estabilizarun pendulo rıgido en la posicion invertida (equilibrio inestable del sistema) haciendo vibrarsu punto de suspension verticalmente a alta frecuencia y pequena amplitud. Kapitza [3] en1951 realizo otro destacado estudio sobre este problema, tan popular entre los investigadores.
En 1993 Acheson [4] (consultar tambien el trabajo anterior de Otterbein [5]) demostro unteorema simple de estabilidad que revela que el mismo “truco” puede realizarse con cualquiernumero finito de pendulos rıgidos en posicion invertida, unidos entre sı formando una cadena.Dicho teorema proporciona una condicion simple en la amplitud y frecuencia de la excitacionvertical oscilatoria, aplicada sobre el punto de suspension mas bajo, que es necesaria paraestabilizar la cadena de pendulos.
Para establecer el teorema aplico la teorıa de pequenas oscilaciones en las ecuaciones de La-grange de movimiento del sistema. Demostro que en este caso las ecuaciones de movimientoresultan ser n ecuaciones de Mathieu desacopladas. La condicion en amplitud y frecuenciala obtuvo imponiendo que todos los autovalores cayeran en la region de estabilidad de laecuacion de Mathieu, y se expresa en forma de una inecuacion. En esta, la frecuencia re-querida varıa inversamente con la amplitud de la oscilacion, resultado similar al que obtuvoStephenson en el caso de un solo pendulo. Es decir, cuando el producto de la amplitud por lafrecuencia supera un determinado valor, el teorema de estabilidad predice que el equilibriose vuelve estable.
En 1995 Levi y Weckesser [6] dieron una explicacion geometrica directa y simple del efectoestabilizador de la vibracion de alta frecuencia en el problema del pendulo invertido. Re-alizaron ademas una demostracion experimental sencilla del fenomeno haciendo vibrar elpunto de suspension de un pendulo con una maquina de coser, observando que el equilibrio
1

CAPITULO 1. INTRODUCCION. 2
Figura 1.1: Diagrama frecuencia-amplitud que muestra las regiones de estabilidad e inesta-bilidad predichas por el teorema de Acheson para una configuracion de tres pendulos unidosen la posicion invertida, ası como los modos de desestabilizacion del equilibrio.
Figura 1.2: Viga de aluminio unida a una maquina de coser con un tornillo (Levi y Weckesser).
en la posicion invertida puede ser extraordinariamente estable, dependiendo de la amplitudy de la frecuencia de excitacion.
El legendario “Indian Rope Trick” [8] ocupa un lugar privilegiado en la historia de la magia.Se trata de uno de los mas famosos trucos magicos, existiendo relatos de testigos oculares quesituan su origen en el siglo XIV. Desde que en 1934 se ofreciera una suculenta recompensade 500 guineas a quien realizara el truco al aire libre, muchos magos lo han intentado sinexito. Todavıa hoy en dia sigue habiendo intensos debates entre magos e historiadores sobresi un truco ası podrıa alguna vez haberse realizado, o es solo un mito.
En la primera parte de la representacion del “Indian Rope Trick”, el mago indio tira al aireuna cuerda de unos 18 pies de longitud, la cual queda misteriosamente suspendida en el aire,inmovil y rıgida, desafiando la ley de la gravedad. Quizas el “Indian Rope Trick” sea solouna leyenda, pero aun ası Acheson y Mullin llegaron a la conclusion de que las leyes de lafısica podıan explicar el fenomeno anterior [10].
Desde un punto de vista teorico, el teorema de Acheson predice que es posible estabilizar unacadena de N pendulos en la posicion invertida, lo cual es una configuracion que se parece auna cuerda tanto mas cuanto mayor es N. Para comprobar que esta prediccion matematica

CAPITULO 1. INTRODUCCION. 3
Figura 1.3: Pendulo triple de 50 cm. en la posicion invertida, cuyo punto de suspension vibracon una amplitud de 2 cm. y una frecuencia de 40 Hz. Se observa que la cadena de pendulosretorna a la posicion vertical tras una perturbacion inicial severa. “Not quite the IndianRope Trick”. Acheson y Mullin.
realmente funcionaba en el mundo real, Acheson y Mullin (1997) [9] realizaron una serie deinteresantes experimentos. Lograron estabilizar sistemas de hasta cuatro pendulos unidos enposicion invertida, sometiendo a la base a un movimiento vertical sinusoidal de una frecuenciabastante alta. Ademas, demostraron que la estabilidad de este tipo de configuraciones esbastante robusta incluso para perturbaciones considerables respecto a la posicion recta.
Para tratar de estudiar la estabilidad de la “Indian Rope” (sistema continuo), la estrategianatural es, en la condicion de estabilidad del modelo de N pendulos, dejar la longitud dela cadena fija y hacer tender a infinito el numero de pendulos. En este lımite, la ecuacionde Lagrange de un pendulo tıpico de la cadena puede demostrarse que pasa a la ecuacionde movimiento de una masa elemental de una cuerda continua perfectamente flexible, a undistancia “s” a lo largo de la cuerda del punto de suspension oscilante.
Desafortunadamente, en este lımite, el rango de parametros excitadores que estabilizan lacadena invertida se desvanece. La frecuencia requerida se vuelve infinita y la maxima am-plitud requerida tiende a cero, por lo que este modelo no es valido para el estudio de laestabilidad de una cuerda.
Acheson y Mullin llegaron a predecir que, si pudieran excitar una cuerda con una frecuenciaextraordinariamente alta y una amplitud extremadamente pequena, la cuerda se mantendrıarecta en posicion vertical [10].
Conviene senalar que realmente ninguna cuerda es perfectamente flexible. Esta compuestade fibras rıgidas, y un segmento suficientemente corto permanecera vertical por sı mismo,demostrando que aunque la rigidez sea pequena en ningun caso es despreciable.
Acheson y Mullin no lograron estabilizar una cuerda, pero demostraron experimentalmenteque un trozo de cable de cortina con una cierta rigidez a flexion, cuya longitud es ligeramentesuperior a la crıtica para la cual pandea por su propio peso, se podıa estabilizar en la posicionvertical recta sometiendo a su base a una vibracion vertical de adecuada amplitud y frecuencia[11]. Este fenomeno es el que en el mundo cientıfico se ha bautizado como “Not quite theIndian Rope Trick” o “Indian wire Trick”, y es el objeto del presente proyecto.
Hoy en dıa es bien conocido que una excitacion de alta frecuencia (HFE) puede cambiar laspropiedades “efectivas”, “lentas” o “promedio” de los sistemas mecanicos, como por ejemplosu rigidez, las frecuencias naturales, los equilibrios, la estabilidad de los equilibrios y los
CAPITULO 1. INTRODUCCION. 4
diagramas de bifurcacion. Para mas informacion a este respecto se recomienda consultar laref. [22].
La estabilizacion del pendulo en la posicion invertida es un ejemplo de modificacion dela estabilidad de un equilibrio mediante HFE, mientras que la estabilizacion del cable decortina de Mullin en posicion vertical demuestra que las HFE permiten en determinadascircunstancias aumentar la rigidez efectiva de una viga y, como consecuencia, incrementartambien la carga crıtica de pandeo de la misma.
El cable de cortina utilizado por Acheson y Mullin en los experimentos esta compuesto esen-cialmente por un muelle helicoidal de traccion fabricado en acero. Dicho muelle esta dotadode una rigidez a flexion muy pequena y tiene una cubierta de plastico que lo envuelve.
En el caso estatico (sin vibracion) este cable presenta una comportamiento a pandeo muydiferente a una viga. Sus relaciones constitutivas presentan una no-linealidad evidente, yaque su pandeo es subcrıtico en lugar de supercrıtico. Esto se traduce en un comportamientode tipo histeretico en cuanto al pandeo: partiendo de una configuracion estable, al aumentarla longitud llega un momento en que el cable pandea por su propio peso. Si en ese momento,con el cable pandeado, se disminuye la longitud del mismo, el cable no recupera la posicionrecta inmediatamente, como serıa de esperar en una viga (comportamiento lineal). Por elcontrario, hasta que no se alcanza una longitud bastante menor que la crıtica de pandeo(aproximadamente el 80 % de la misma), el cable no recupera la posicion recta.
Utilizando un modelo geometricamente exacto de una viga (Cosserrat) [17] se estudio en [23]y [24] el comportamiento de la solucion pandeada de una viga. En dichos trabajos se uti-lizaron leyes constitutivas no-lineales del material para intentar reproducir el comportamientohisteretico del pandeo del cable de cortina, aunque no se obtuvo el exito esperado.
Simulaciones numericas realizadas con el programa de elementos finitos ABAQUS [25] pare-cen indicar que es la propia geometrıa del muelle del cable, y especialmente el contacto entrediferentes espiras que se produce cuando el muelle pandea, la responsable de la no-linealidadque produce el comportamiento histertico a pandeo.
1.1. Objetivos del proyecto.
Este trabajo pretende continuar las investigaciones llevadas a cabo por varios autores paraexplicar los resultados experimentales obtenidos por Mullin sobre la estabilizacion del cablede cortina. Dichos trabajos se recogen principalmente en cuatro artıculos:
“The Indian Rope Trick for a parametrically excited flexible rod: linearized analy-sis” [12]. Autores: Chamneys y Fraser. 2000.
“The Indian Rope Trick for a parametrically excited rod; nonlinear and subharmonicanalysis” [14]. Autores: Chamneys y Fraser. 2001.
“The parametrically excited upside-down rod: an elastic jointed pendulum model” [15].Autores: Galan, Fraser, Acheson y Champneys. 2005.

CAPITULO 1. INTRODUCCION. 5
“The Indian wire Trick via parametric excitation: a comparison between theory andexperiment” [13]. Autores: Mullin, Chamneys, Fraser, Galan y Acheson. 2003.
Los objetivos principales del presente trabajo son:
1. Desarrollar un modelo sencillo que permita obtener una explicacion coherente y cuan-titativamente correcta del “Indian rope trick” de Acheson y Mullin.
2. Comparar los enfoques utilizados y los resultados obtenidos con los de los artıculoscitados anteriormente.
3. Responder a las siguientes preguntas:
¿Es realmente posible estabilizar una cuerda de cualquier longitud mediante una os-cilacion vertical de una frecuencia suficientemente elevada y una amplitud lo bastantepequena, como predecıan Acheson y Mullin?
¿Cual es el efecto que tiene modificar la amplitud de la vibracion, la seccion de laviga o el amortiguamiento del material sobre el intervalo de frecuencias que permiteestabilizar el sistema para longitudes supercrıticas?
Una viga de longitud inferior a la crıtica y por tanto estable en posicion vertical, ¿puededesestabilizarse por el efecto de la la vibracion de su base?.
La estructura del presente trabajo es como sigue:
En el capıtulo segundo se realiza una introduccion teorica sobre sistemas dinamicos yresonancia parametrica.
El tercer capıtulo esta dirigido a explicar algunas de las investigaciones anteriores sobreel problema de la cuerda india.
En el cuarto capıtulo se exponen los modelos del “Indian wire” utilizados por otrosautores y se realiza un desarrollo de un modelo dinamico lineal de una viga.
El quinto capıtulo se dedica a explicar la tecnica de solucion aproximada de la ecuaciondiferencial que gobierna el movimiento transversal de la viga.
En el sexto capıtulo se realizan continuaciones numericas para estudiar si el modelopropuesto permite explicar los resultados experimentales de Mullin, y se analiza elefecto de la variacion de algunos parametros del sistema sobre el equilibrio de la solucionrecta.
Finalmente, en el septimo capıtulo se exponen las conclusiones y se realizan propuestaspara futuros trabajos.
Capıtulo 2
Introduccion teorica.
En los proximos capıtulos se explicaran los estudios anteriores realizados sobre el “Indian wiretrick”, incluyendo un modelo lineal sencillo que permite obtener interesantes resultados sobrela dinamica del problema. Este capıtulo intermedio tiene el proposito de explicar brevementealgunos resultados teoricos basicos sobre sistemas dinamicos y la terminologıa que apareceranen el resto del trabajo.
2.1. Sistemas dinamicos
La expresion de un sistema dinamico tiene la siguiente forma:
x = f(t,x, λ) , (2.1)
donde ( ˙ ) significa derivada respecto al tiempo, f es una funcion vectorial, x es un vectorn-dimensional y λ es un vector de k-parametros.
Normalmente, las ecuaciones diferenciales de movimiento de un sistema son de segundo ordenen el tiempo. Dichas ecuaciones se pueden expresar facilmente como un sistema dinamicoutilizando las velocidades, ademas de las posiciones, como variables del problema.
En su forma general, en la que aparece una dependencia temporal explıcita en f , el sistemase llama no autonomo, mientras que en algunos casos no existe dependencia temporal yhablamos de sistemas autonomos.
En este proyecto el interes se centra en la primera clase de sistemas dinamicos, debido a lapresencia de una excitacion exterior armonica que actua sobre la viga.
1. Bifurcaciones.
En un sistema dinamico, una bifurcacion es un cambio cualitativo en el comportamien-to del sistema provocado por un cambio pequeno en el valor de un parametro. Lasbifurcaciones son las responsables de la creacion y desaparicion de equilibrios y desoluciones periodicas en un sistema dado. Su aparicion a menudo viene acompanada
6
CAPITULO 2. INTRODUCCION TEORICA. 7
de un cambio en la estabilidad de la solucion. El conocimiento de dichos cambios cua-litativos es de vital importancia para comprender el comportamiento a largo plazo decualquier sistema dinamico.
La aparicion de bifurcaciones puede investigarse geometricamente analizando el espaciode fases para diferentes valores de los parametros en un sistema dado. Las representa-ciones geometricas de las estructuras de bifurcacion tienen la ventaja de permitir unainterpretacion visual de como los parametros del sistema afectan a su comportamiento.
Un diagrama de bifurcacion es un dibujo en el que se representan una medida escalar dela solucion de un sistema dado frente a uno de los parametros. Estas figuras se utilizannormalmente para mostrar como la estabilidad de las soluciones cambia cuando elparametro se hace variar.
Una exposicon mas avanzada y detallada sobre este tema puede encontarse en [20] y[21]
2. Analisis de Floquet de las bifurcaciones.
En un sistema excitado parametricamente como el de interes los objetos invariantes aanalizar son las soluciones periodicas.
Su estabilidad puede determinarse utilizando la Teorıa de Floquet. El primer pasodel analisis de Floquet es el calculo del mapa de Poincare. Esta tecnica reduce unsistema de dimension n a uno de dimension n − 1, y las soluciones periodicas puedenrepresentarse como un punto fijo en el mapa. Un analisis de los autovalores del mapade Poincare linealizado proporciona la estabilidad de la solucion periodica original.Estos autovalores se conocen como multiplicadores de Floquet y deberıan calcularsepara cada punto durante el proceso de continuacion. Basicamente para interpretar estateorıa, hay que tener en cuenta que:
Cuando los multiplicadores de Floquet estan dentro del cırculo unidad en el planocomplejo, la solucion periodica es estable.
Si uno o mas de los multiplicadores de Floquet se encuentran fuera del cırculounidad la solucion periodica es inestable.
Calculando los multiplicadores se puede detectar un cambio cualitativo en el compor-tamiento del sistema, lo que se conoce como un Punto de Bifurcacion. Esto ocurrecuando un multiplicador de Floquet real, o un par de complejos conjugados, atraviesanel cırculo unidad en el plano complejo. El tipo de bifurcacion que ocurre esta determi-nado por el punto en el cual el multiplicador atraviesa el cırculo unidad y la direccionen la que se mueve.
A continuacion se explican brevemente los dos tipos de Puntos de Bifurcacion queaparecen en el problema de interes:
La Bifurcacion tipo Tridente.Se trata de una bifurcacion local que ocurre cuando un multiplicador de Floquetatraviesa el cırculo unidad en el lado positivo del eje real del plano complejo.El multiplicador de Floquet que define el punto de bifurcacion es +1. Implicanormalmente una ruptura de la simetrıa del problema.

CAPITULO 2. INTRODUCCION TEORICA. 8
En la bifurcacion, ademas de una perdida de rango en el jacobiano, aparece unanueva solucion que nace de la existente (Branching point o BP)Hay dos tipo de bifurcaciones BP: supercrıticas y subcrıticas. En ambos casos lasolucion periodica pierde estabilidad. En la forma supercrıtica la solucion periodi-ca pierde estabilidad al nacer un par de orbitas asimetricas periodicas estables,mientras que en la forma subcrıtica pierde la estabilidad al absorber un par deorbitas asimetricas inestables.
La Bifurcacion de Duplicacion de Periodo (PD).
Se trata de una bifurcacion local que ocurre cuando un multiplicador de Floquetreal atraviesa el cırculo unidad en el lado negativo del eje real del plano complejo.El multiplicador de Floquet que define el punto de bifurcacion es -1.Hay dos tipos de bifurcaciones PD: supercrıticas y subcrıticas, al igual que en lasBP. En la forma supercrıtica la solucion pierde la estabilidad al nacer una orbitaperiodica de periodo doble, mientras que en la subcrıtica la pierde al absorber unaorbita inestable de periodo doble.
2.2. Resonancia parametrica.
La resonancia parametrica ocurre en un sistema mecanico cuando es excitado parametrica-mente y oscila a una de sus frecuencias de resonancia. La excitacion parametrica se diferenciade la forzada en que actua como una modificacion de uno de los parametros del sistema quevarıa en el tiempo.
Ası pues, este termino aparece en el lado izquierdo de la ecuacion en vez de en el lado derecho,donde suelen aparecer los terminos de fuerzas externas. Este tipo de excitacion se diferenciade la resonancia normal o de la superarmonica en que produce un fenomeno de inestabilidad.
El ejemplo clasico de resonancia parametrica es el pendulo excitado verticalmente. La es-tabilidad de la solucion periodica para pequena amplitud, obtenida mediante linealizacion,viene dada por:
d2u
dt2+ (α+ β cos(t))u = 0, (2.2)
donde u es una perturbacion de la solucion perodica,√α es la frecuencia natural y β es
la amplitud del desplazamiento vertical del punto de suspension que oscila con frecuenciaadimensional unidad.
La ecuacion (2.2) tiene la misma estructura que la ecuacion de Mathieu, que tiene el pico masimportante de resonancia en 2:1, es decir, cuando la frecuencia de excitacion es el doble de lafrecuencia natural. Este fenomeno de resonancia parametrica se caracteriza por la presenciade inestabilidad en las soluciones.
Si se incluye amortiguamiento en la ecuacion de Mathieu, la forma de las “lenguas de reso-nancia” cambia, lo que produce una estabilizacion del sistema. Este fenomeno de “lenguas

CAPITULO 2. INTRODUCCION TEORICA. 9
de inestabilidad” es uno de los puntos de interes en los estudios [12] y [14] sobre la “IndianRope”.

Capıtulo 3
Investigaciones anteriores sobre el“Indian Wire”.
Se han realizado varios estudios sobre el problema del “Indian Wire Trick”. En ellos seutilizan diferentes modelos y herramientas de analisis para tratar de explicar el fenomeno dela estabilizacion de una viga supercıtica en posicion vertical, cuando su base se somete a unavibracion de adecuada amplitud y frecuencia.
Destacan los cuatro artıculos ya enumerados, que se analizaran en este capıtulo, explicandomodelos utilizados, tecnicas de analisis empleadas y resultados obtenidos.
3.1. The ‘Indian Rope Trick’ for a parametrically excited flex-ible rod: linearized analysis [12] (El ‘Truco de la Cuer-da India’ para una cuerda excitada parametricamente:analisis linealizado).
Se trata del primer estudio directo a traves de un modelo continuo del problema del “IndianRope Trick”. Champneys y Fraser utilizan en este artıculo leyes constitutivas elasticas ylineales para obtener unas ecuaciones geometricamente no-lineales de la dinamica de unacolumna, basadas en la formulacion de Frenet.
Considerando el problema de torsion libre, linealizan las ecuaciones alrededor de la soluciontrivial para obtener una ecuacion en derivadas parciales (PDE) lineal, no-autonoma y no-homogenea, que describe los desplazamientos transversales de la viga.
Se puede demostrar que si en el modelo de N pendulos de Acheson se incluye una fuerzaelastica restauradora en las uniones proporcional al giro relativo entre dos pendulos ady-acentes, y se hace tender el numero de pendulos a infinito, se llega a la misma ecuaciondiferencial que la utilizada por los autores.
Champneys y Fraser estudian entonces las soluciones de esta PDE utilizando tecnicas asintoticasy teorıa de Floquet numerica, encontrando buena concordancia entre ambas para predecir
10

CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 11
las condiciones en amplitud y frecuencia que permiten estabilizar la columna que supera lalongitud crıtica.
Encuentran una condicion simple (3.1) para la frecuencia (ω) mınima necesaria para esta-bilizar el sistema en terminos de la amplitud (∆), de la longitud de la columna (l), de sulongitud crıtica de pandeo (lc) y de la gravedad (g), la cual es consistente con la analogıa delos pendulos rıgidos (teorema de Acheson): la frecuencia necesaria para estabilizar la columnavarıa inversamente con la amplitud.
ω2 > 1,27lg
4π2∆2(1− l3c
l3) (3.1)
Los resultados de Acheson del modelo de N pendulos invertidos definen una frontera superiorpara la frecuencia de excitacion, a partir de la cual el equilibrio de la posicion recta pasaa ser inestable, lo cual concuerda con los resultados experimentales que Mullin obtuvo conel cable de cortina. Es decir, para una configuracion de N pendulos en posicion invertida opara un cable de longitud supercrıtica en posicion vertical, existe una frecuencia mınima yuna maxima entre las cuales el equilibrio del cable es estable.
Sin embargo, en este modelo continuo, Champneys y Fraser no consiguen encontrar una fron-tera nıtida de frecuencias maximas debido, argumentan, a la presencia de infinitas “lenguasde resonancia”.
Tampoco consiguen encontrar una buena concordancia cuantitativa con los experimentosde Mullin. Las frecuencias mınimas que predice este modelo de la “Indian Rope” para laestabilizacion del sistema son muy inferiores a las experimentales. En concreto, la formula(3.1) obtenida subestima el valor del lımite inferior de la frecuencia en un factor que se situaentre dos y cuatro.
3.2. The ’Indian Rope Trick’ for a parametrically excited rod:nonlinear and subharmonic analysis [14] (El ‘Truco dela Cuerda India’ para una cuerda excitada parametrica-mente: analisis no-lineal y subarmonico).
En este segundo artıculo, Fraser y Champneys extienden el analisis linealizado del modelode viga de su primer artıculo, para incluir tridimensionalidad y no-linealidad geometrica.La estabilidad de la solucion recta se analiza utilizando expansiones asintoticas debiles en ellımite de las excitaciones de pequena amplitud.
En primer lugar estudian el problema no forzado, extendiendo el resultado clasico de Green-hill [1] de mostrar que todas las bifurcaciones son supercrıticas, si las leyes constitutivas quese utilizan son lineales. Los principales resultados sobre el problema forzado son referentes alas inestabilidades dinamicas mas simples.
Mientras que la inestabilidad de baja frecuencia esta asociada con el modo espacial de flexionpura (pandeo estatico), la superior parece estar causada por una resonancia dinamica en-tre un modo espacial de la columna de orden mayor y el primer armonico o subarmonico
CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 12
de la excitacion. Realizan una descripcion asintotica de estas inestabilidades (resonanciassubarmonicas), incluyendo informacion sobre la estabilidad de los estados de bifurcaciondinamica.
La teorıa que presentan ofrece interesantes resultados a nivel cualitativo, por dos motivosprincipalmente. Primero, la interaccion de las “lenguas de resonancia” que describen per-mite explicar la inexactitud de la formula obtenida en el primer artıculo. Segundo, las dosinestabilidades apreciadas en el experimento de Mullin corresponden en efecto a un modode flexion pura (pandeo) y al tercer modo espacial oscilando a la frecuencia de la excitacion,que es totalmente consistente con la hipotesis de esta teorıa de que es la interaccion entreestos dos modos para la frecuencia crıtica superior la que esta detras de lo que se observa.
Ademas, explican que a la hora de buscar concordancia cuantitativa con los experimentos delcable de cortina, deberıa recordarse que el analisis presentado no contiene amortiguamiento.Como es bien sabido (p. e. Nayfey y Mook (1979) [18]), el amortiguamiento tiene el efecto dedespegar las “lenguas de resonancia” correspondientes a armonicos mas elevados fuera deleje de amplitudes nulas. De alguna manera esto justifica que se centren en este artıculo ensolo las “lenguas de resonancia” de orden mas pequeno.
Reflexionan sobre que una de las caracterısticas del cable de cortina es que esta hecho de unmaterial claramente elastico no-lineal. De hecho, la no-linealidad suavizadora en sus leyesconstitutivas de momentos es tan extrema que su pandeo estatico es subcrıtico, como secomento en la introduccion del problema. Sin embargo, el analisis realizado por los autoresrevela que las columnas elasticas lineales pandean supercriticamente por el efecto de lasno-linealidades geometricas puras.
No obstante, parece que esta no-linealidad del material no juega un papel crucial en losfenomenos observados, ya que Tom Mullin ha desarrollado otros experimentos que demues-tran que columnas elasticas de material lineal (niobio) pueden tambien estabilizarse por ex-citacion parametrica, obteniendo en los experimentos resultados cualitativamente similaresa los del cable de cortina.
3.3. The parametrically excited upside-down rod: an elas-tic jointed pendulum model [15] (La cuerda excitadaparametricamente arriba-abajo: un modelo de penduloscon uniones elasticas).
Los autores utilizan un modelo discreto del problema consistente en una cadena de N pendu-los acoplados mediante uniones elasticas y con amortiguamiento, sometida a una vibracionsinusoidal vertical de la base. El objetivo principal del estudio es demostrar que la teorıaasintotica presentada en los artıculos [12] y [14] es valida tambien para amplitudes de os-cilacion mayores, que violan las hipotesis de los modelos utilizados en estos artıculos.
Utilizando la formulacion de Lagrange se obtienen las ecuaciones de movimiento de los Npendulos, las cuales se linealizan en torno a la posicion recta invertida. Se demuestra queutilizando un escalado apropiado, con este modelo se llega a un modelo de viga continua

CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 13
cuando N → ∞, el cual es identico al utilizado en el artıculo [12], pero incluyendo untermino de amortiguamiento del material.
Se estudia el comportamiento bifurcacional de la posicion recta en funcion de los cuatroparametros de interes (amplitud, frecuencia, rigidez y amortiguamiento). Se dibujan las cur-vas de la inestabilidad estatica y dinamica en funcion de dichos parametros y se muestraque son independientes del numero de pendulos, a partir de un valor de N lo suficientementeelevado (N=32). Ademas, no se recomienda utilizar valores mayores de N, ya que al apareceren las matrices del sistema de ecuaciones terminos de orden N4, para valores mayores de Nla continuacion parametrica presenta problemas de mal condicionamiento numerico.
En el artıculo [14] se muestra que los terminos no-lineales no son en absoluto cruciales alestudiar como las varias inestabilidades del equilibrio vertical interactuan variando la rigidez,la amplitud y la frecuencia para el modelo continuo. Por ello, es razonable utilizar este modelolinealizado.
Ademas, para cualquier demostracion practica del ’Indian Rope Trick’ el amortiguamien-to juega un papel determinante, lo que supone otra ventaja de este modelo sobre los dosanteriores.
Para investigar la estabilidad de la solucion vertical del sistema linealizado se utiliza elsoftware de continuacion numerica AUTO [19] de la siguiente manera. El punto inicial es lasolucion recta vertical para un numero fijo de pendulos. Esto se representa como una solucionperiodica del sistema no-autonomo de ODEs. Entonces se continua la solucion mientras unode los parametros adimensionales (B, ε, ω o Γ) varıa, estando dichos parametros asociadosa la rigidez, la amplitud, la frecuencia y el amortiguamiento, respectivamente. Al hacer estoes posible monitorizar los multiplicadores de Floquet caracterısticos y aproximadamente lospuntos de bifurcacion, para los cuales los multiplicadores cruzan el cırculo unidad.
Una vez que se localiza un BP (Branch Point) o una PD (Period Doubling), es posiblecontinuarlos en dos parametros y determinar las regiones de estabilidad del sistema. Alter-nativamente, pueden desarrollarse investigaciones en el caracter espacial y temporal del modoque se esta bifurcando, pidiendo a AUTO que cambie de rama en el BP. Sin embargo, no sepuede detectar comportamiento no-lineal como la super o subcriticidad de la bifurcacion ocualquier bifurcacion secundaria, ya que se estan usando las ecuaciones linealizadas.
Inestabilidad estatica.
En ausencia de fuerzas externas (amplitud 0) y de fuerzas elasticas restauradoras (B=0) elsistema de N pendulos (y su equivalente continuo) es inestable en su posicion vertical. Amedida que se aumenta el termino elastico, la solucion se vuelve estable. Para el sistemacontinuo el valor crıtico de B para esa transicion en valores adimensionales es Bcr=0.127594(ver artıculo [12]). Al mismo resultado se llega con el modelo de N pendulos, para N sufi-cientemente grande.
El efecto del amortiguamiento.
En el modelo continuo [12] el caso no amortiguado se estudio por medio de un analisisasintotico y Teorıa de Floquet numerica. La presencia de un numero infinito de resonancias enun rango finito de valores de los parametros hace problematico este analisis. Es bien conocidoque la inclusion de amortiguamiento en el modelo no solo hace al modelo mas realista, sinoque, ademas, en el lımite N → ∞ elimina las resonancias de mayor orden moviendolasa mayores valores de ε (amplitud adimensional). Con niveles de amortiguamiento realista,

CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 14
solo unas pocas inestabilidades permanecen, las cuales concuerdan cualitativamente con losexperimentos.
Representando los multiplicadores de Floquet en funcion de la frecuencia, se observa que enel caso sin amortiguamiento aparecen muchas ventanas estrechas de estabilidad intercaladascon picos cortos y mesetas correspondientes al cruce de lenguas de inestabilidad. Al aumentarN hay una variacion mas rapida por el mayor numero de modos espaciales y por tanto unamayor propension de inestabilidad parametrica.
Al aumentar el valor de Γ (amortiguamiento) se ensanchan las regiones de estabilidad y dis-minuye el numero de picos de inestabilidad. Esto confirma la idea de que el amortiguamientodestruye las lenguas de resonancia estrechas (mas precisamente las mueve a valores mas altosde ε en un espacio de parametros). Se observa que solo las inestabilidades correspondientes amodos espaciales simples sobreviven cuando el amortiguamiento aumenta para valores fijosde la amplitud.
Conclusiones.
Las formas de las curvas de inestabilidad de los diferentes diagramas de bifurcacion queobtienen y los modos de forma de las inestabilidades correspondientes se acercan bien a loscorrespondientes al experimento del cable de cortina. Hay que tener en cuenta no obstanteque en estos diagramas se trabaja con magnitudes adimensionales, cuando en el experimentode Mullin son la longitud L y la frecuencia ω los parametros de interes.
Como conclusion, con este estudio se demuestra que el fenomeno de estabilizacion de vigasde longitudes supercrıticas mediante vibracion de su base es robusto bajo la inclusion deamortiguamiento.
3.4. The ‘Indian wire Trick’ via parametric excitation: a com-parison between theory and experiment [13] (El ‘Trucodel Cable Indio’ por medio de una excitacion parametri-ca: una comparacion entre la teorıa y los experimentos).
Los autores presentan en este artıculo detalles cuantitativos de los experimentos de TomMullin y porporcionan una explicacion para las observaciones sobre la estabilizacion delcable en funcion de los resultados obtenidos en los artıculos anteriores.
El cable utilizado en los experimentos consistıa en un muelle de seccion circular con una cu-bierta de plastico. La longitud crıtica (lc) de pandeo por su propio peso del cable resulto serde 55.3 cm. El cable se empotro en un su base y se sometio a una oscilacion vertical aproxi-madamente sinusoidal de amplitud fija igual a 2.2 cm. de extremo a extremo. Las frecuenciasde oscilacion oscilaron entre 0 y 35 Hz.
Se tomaron varias longitudes li un poco mayores que lc. Para cada li se soltaba el cable enla posicion recta y se incrementaba la frecuencia en intervalos de 0.5 Hz, dejando para cadafrecuencia un tiempo para que los efectos transitorios se disiparan.
Se observo que para cada li la posicion vertical se hacıa estable para un rango ω1 < ω < ω2.La region de estabilidad obtenida se muestra en la figura 3.1, y se trata del area entre lascurvas ω1(l) y ω2(l) para l > lc.

CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 15
Figura 3.1: Datos experimentales y la “franja inferior” de la teorıa simple.
La frontera de estabilidad inferior ω1(l) se caracteriza porque el cable, inicialmente en laregion de estabilidad, pandea al reducirse ω (figura 3.2 c). Se trata de un pandeo dinamico,en lugar del pandeo estatico del problema no forzado.
La inestabilidad superior ω2(l) se observo que era mas violenta. Al aumentar la frecuenciael cable repentinamente se hacıa inestable con oscilaciones planas de gran amplitud queprovocaban deformaciones plasticas en el cable. Al inicio de la inestabilidad, las oscilacionesse producıan a la misma frecuencia que la de excitacion de la base y eran predominantementeen el tercer modo (figura 3.2 d).
Los experimentos revelaron que los efectos transitorios pueden jugar un papel importante.En particular, se encontraron evidencias de inestabilidades de resonancia adicionales en laregion dinamicamente estable de la figura 3.1. Es decir, en algunas ocasiones se excitabanoscilaciones laterales que implicaban una mezcla de diferentes modos espaciales y que podıancausar una perdida de estabilidad bastante por debajo de ω2 al incrementar lentamente ω.
Para la mayorıa de la region “dinamicamente estable”, el cable se encontro que era estable, esdecir, que a la punta se le podıa dar un ligero empujon y el movimiento lateral correspondientedecaıa con el tiempo.
El mismo fenomeno de estabilizacion mas alla de la longitud crıtica de pandeo se encon-tro utilizando otros materiales como un cable de niobio de 2 m. de longitud. Sin embargo,los autores se centraron en los resultados del cable de cortina, ya que eran robustos y laslongitudes de cable implicadas eran practicas.
Los autores trataron entonces de explicar cualitativa y cuantitativamente los resultados ex-perimentales utilizando las tres teorıas explicadas en los artıculos [12] , [14] y [15].
Utilizando la teorıa mas simple del primer artıculo (que no tiene en cuenta el amortiguamien-to ni las no-linealidades geometricas), obtuvieron las tres primeras frecuencias naturales paral = lc (4.9, 14.4 y 28.5 Hz). Los modos correspondientes son el segundo, el tercero y el cuarto,

CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 16
Figura 3.2: Demostracion experimental de Mullin: (a) el cable pandeado; (b) el cable verti-cal estabilizado; (c) movimiento de inclinacion cerca de la inestabilidad de “caıda” a bajafrecuencia; y (d) movimiento cerca de la frecuencia superior de la inestabilidad dinamica.
CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 17
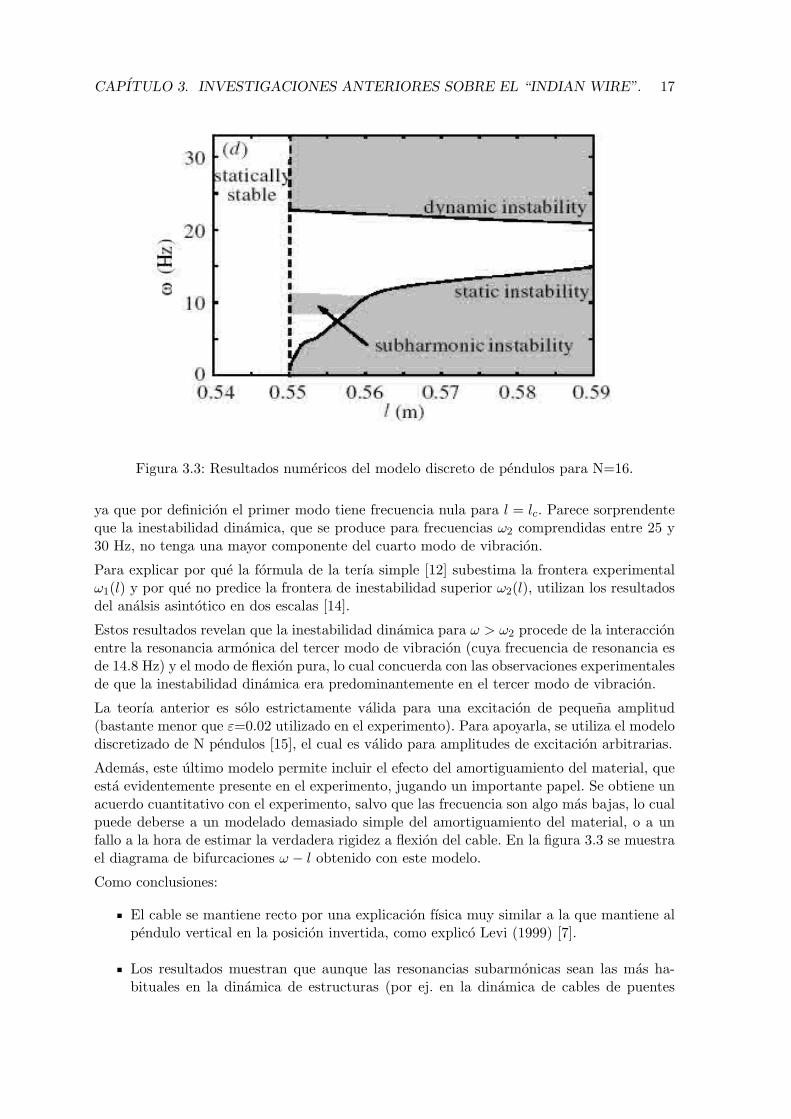
Figura 3.3: Resultados numericos del modelo discreto de pendulos para N=16.
ya que por definicion el primer modo tiene frecuencia nula para l = lc. Parece sorprendenteque la inestabilidad dinamica, que se produce para frecuencias ω2 comprendidas entre 25 y30 Hz, no tenga una mayor componente del cuarto modo de vibracion.
Para explicar por que la formula de la terıa simple [12] subestima la frontera experimentalω1(l) y por que no predice la frontera de inestabilidad superior ω2(l), utilizan los resultadosdel analsis asintotico en dos escalas [14].
Estos resultados revelan que la inestabilidad dinamica para ω > ω2 procede de la interaccionentre la resonancia armonica del tercer modo de vibracion (cuya frecuencia de resonancia esde 14.8 Hz) y el modo de flexion pura, lo cual concuerda con las observaciones experimentalesde que la inestabilidad dinamica era predominantemente en el tercer modo de vibracion.
La teorıa anterior es solo estrictamente valida para una excitacion de pequena amplitud(bastante menor que ε=0.02 utilizado en el experimento). Para apoyarla, se utiliza el modelodiscretizado de N pendulos [15], el cual es valido para amplitudes de excitacion arbitrarias.
Ademas, este ultimo modelo permite incluir el efecto del amortiguamiento del material, queesta evidentemente presente en el experimento, jugando un importante papel. Se obtiene unacuerdo cuantitativo con el experimento, salvo que las frecuencia son algo mas bajas, lo cualpuede deberse a un modelado demasiado simple del amortiguamiento del material, o a unfallo a la hora de estimar la verdadera rigidez a flexion del cable. En la figura 3.3 se muestrael diagrama de bifurcaciones ω − l obtenido con este modelo.
Como conclusiones:
El cable se mantiene recto por una explicacion fısica muy similar a la que mantiene alpendulo vertical en la posicion invertida, como explico Levi (1999) [7].
Los resultados muestran que aunque las resonancias subarmonicas sean las mas ha-bituales en la dinamica de estructuras (por ej. en la dinamica de cables de puentes

CAPITULO 3. INVESTIGACIONES ANTERIORES SOBRE EL “INDIAN WIRE”. 18
es la unica resonancia dinamica importante a ser considerada por los disenadores),las resonancias armonicas pueden llevar a efectos particularmente significativos, bajocondiciones en las que interactuan con una bifurcacion estatica.
Ademas, la presencia de resonancia armonica puede hacer que un analisis de bifurcacionestatico de un grado de libertad sea muy inexacto.
Capıtulo 4
Modelado del “Indian Wire”.
En este capıtulo se describiran los modelos del “Indian Wire” utilizados en otras investi-gaciones, comparandolos con el modelo propuesto. Se obtendra la ecuacion diferencial enderivadas parciales que gobierna los movimientos transversales del modelo de viga propues-to, y se describira la tecnica de discretizacion utilizada para aproximar la solucion de dichaecuacion diferencial.
4.1. Ecuaciones de los modelos anteriores
4.1.1. Modelo lineal de Champneys y Fraser.
En el primer artıculo, Champneys y Fraser utilizan directamente un modelo continuo que esuna simplificacion de un modelo dinamico mas general basado en leyes constitutivas linealesaplicadas en un sistema de coordenadas de Frenet, valido para formas mas generales deexcitacion.
Utilizan una columna de seccion circular de material isotropico lineal. Se asume que la vigatiene un eje inextensible.
Se argumenta que la deformacion por torsion no juega ningun papel y que el efecto de lainercia a rotacion puede rechazarse (por ser la viga muy esbelta).
Las ecuaciones se linealizan entonces en torno al estado trivial (solucion recta), obteniendouna ecuacion diferencial para los movimientos transversales de la columna u, cuya versionadimensional es:
D2u+ δBu′′′′ + (δ − ε cos t)[(1− s)u′]′ = 0, (4.1)
siendo t y s el tiempo y la longitud de arco adimensionales, y δ, ε y B parametros adimen-sionales asociados a la gravedad, la amplitud de la vibracion y la rigidez a flexion de la viga,respectivamente.
19
CAPITULO 4. MODELADO DEL “INDIAN WIRE”. 20
4.1.2. Modelo no-lineal de Champneys y Fraser.
En el segundo artıculo, Fraser y Champneys parten del mismo modelo dinamico general queen el primer artıculo. En este caso no realizan la linealizacion en el entorno de la solucionrecta, sino que mantienen la no-linealidad geometrica que contienen intrınsecamente lasecuaciones del modelo, las cuales son validas para grandes deflexiones laterales de la columna.
No se detallan en este trabajo las ecuaciones, por carecer de interes su comparacion con lasdel modelo lineal que se va a desarrollar posteriormente.
4.1.3. Modelo de N pendulos con rigidez y amortiguamiento.
Los autores consideran una configuracion de N pendulos de longitud l y masa m, unidos entresı en la configuracion invertida. El pivote mas bajo se mueve con un movimiento sinusoidal∆ cosωt.
En cada union se asume que existe una fuerza restauradora (rigidez a rotacion k), propor-cional al angulo relativo girado entre dos pendulos adyacentes. Ademas, cada union se suponeque experimenta una fuerza de amortiguamiento proporcional a la velocidad angular relativaentre dos pendulos unidos entre sı.
Utilizando la formulacion lagrangiana derivan las N ecuaciones diferenciales de movimientodel sistema formado por N pendulos. Linealizan las ecuaciones en torno a la posicion rectaconsiderando los angulos girados pequenos, y utilizan este modelo discreto de N pendulospara estudiar el problema de interes. Haciendo tender el numero de pendulos a infinito,demuestran que escalando adecuadamente los parametros del sistema se llega a la ecuaciondiferencial del lımite continuo de columna del modelo descrito:
−φ+ (εω2 cosωτ − 1)[(1− s)φ]′′ −BφIV = ΓφIV , (4.2)
siendo τ y s el tiempo y la longitud de arco adimensionales, y ε, ω, B y ∆ parametrosadimensionales asociados a la amplitud de la vibracion, a la frecuencia, a la rigidez a flexionde la viga y al coeficiente de amortiguamiento del material, respectivamente.
Esta ecuacion es equivalente a la de una columna continuamentre flexible con rigidez a flexionB y coeficiente de amortiguamiento del material Γ. La equivalencia entre esta ecuacion y laecuacion (4.1) puede comprobarse haciendo la sustitucion φ = y′, e integrando respecto a scon la condicion de contorno de que φ(0) = 0.
No obstante, conviene recordar que el modelo lineal de Champneys y Fraser no incluyetermino de amortiguamiento, el cual juega un papel importante en cualquier demostracionpractica del “Indian Rope trick”. Tambien hay que tener en cuenta que los parametrosadimensionales utilizados son diferentes en una y otra ecuacion.
CAPITULO 4. MODELADO DEL “INDIAN WIRE”. 21
Figura 4.1: Modelo fısico del sistema.
4.2. Modelo dinamico lineal de una viga con amortiguamientointerno.
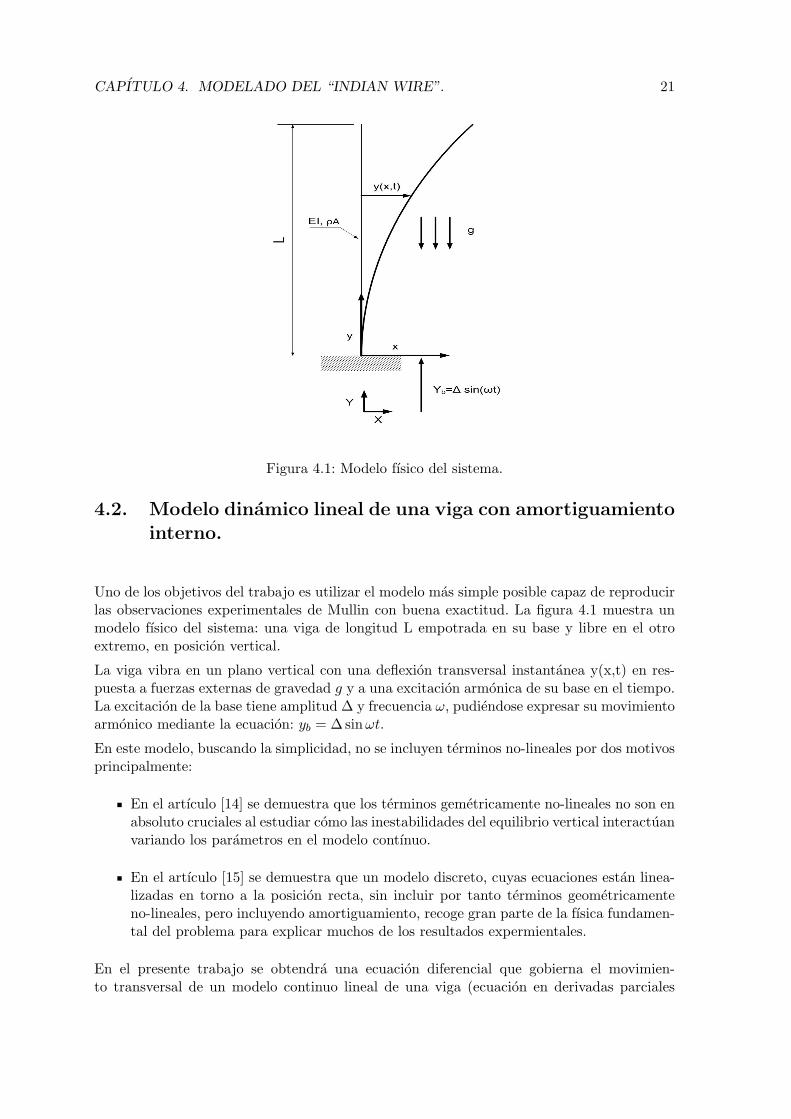
Uno de los objetivos del trabajo es utilizar el modelo mas simple posible capaz de reproducirlas observaciones experimentales de Mullin con buena exactitud. La figura 4.1 muestra unmodelo fısico del sistema: una viga de longitud L empotrada en su base y libre en el otroextremo, en posicion vertical.
La viga vibra en un plano vertical con una deflexion transversal instantanea y(x,t) en res-puesta a fuerzas externas de gravedad g y a una excitacion armonica de su base en el tiempo.La excitacion de la base tiene amplitud ∆ y frecuencia ω, pudiendose expresar su movimientoarmonico mediante la ecuacion: yb = ∆ sinωt.
En este modelo, buscando la simplicidad, no se incluyen terminos no-lineales por dos motivosprincipalmente:
En el artıculo [14] se demuestra que los terminos gemetricamente no-lineales no son enabsoluto cruciales al estudiar como las inestabilidades del equilibrio vertical interactuanvariando los parametros en el modelo contınuo.
En el artıculo [15] se demuestra que un modelo discreto, cuyas ecuaciones estan linea-lizadas en torno a la posicion recta, sin incluir por tanto terminos geometricamenteno-lineales, pero incluyendo amortiguamiento, recoge gran parte de la fısica fundamen-tal del problema para explicar muchos de los resultados expermientales.
En el presente trabajo se obtendra una ecuacion diferencial que gobierna el movimien-to transversal de un modelo continuo lineal de una viga (ecuacion en derivadas parciales

CAPITULO 4. MODELADO DEL “INDIAN WIRE”. 22
espaciales y temporales). A continuacion, utilizando un metodo de discretizacion modal(Galerkin) se reducira el estudio de la ecuacion original al de un sistema de ecuaciones dife-renciales ordinarias (solo temporales) cuya solucion aproxima a la de la ecuacion diferencialorginal, tanto mejor cuanto mayor sea el numero de modos que se consideren.
4.2.1. Equilibrio de un elemento diferencial de una viga.
Como bien es sabido, para que una viga de longitud L pandee por su propio peso debe sermuy esbelta (Lt/L 1), siendo Lt una dimension caracterıstica de la seccion transversal.Ademas, como se pretende estudiar el equilibrio de la solucion recta, tiene sentido utilizarun modelo basado en la Resistencia de Materiales cuyas hipotesis basicas son:
Solido homogeneo e isotropo.
Comportamiento lineal: se admite que los desplazamientos y deformaciones son muypequenos, por lo que la geometrıa deformada se toma coincidente con la inicial.
Asimismo, por la gran esbeltez de la viga, se puede utilizar la hipotesis de la teorıa de Euler-Bernouilli de que las secciones planas se mantienen planas y perpendiculares a la lınea mediadeformada (se desprecia la deformacion por cortante).
Se considera que la viga tiene propiedades constantes de la seccion transversal, con unarigidez a flexion EI y con una masa por unidad de longitud ρA, siendo E el modulo deYoung del material, I la inercia menor de la seccion, ρ la densidad del material y A el areade la seccion transversal. El material de la viga es viscoelastico lineal.
Sin perdida de generalidad, con el proposito de simplificar las ecuaciones, supondremos queexiste una direccion principal de inercia, por lo que solo consideraremos flexion en un plano.
Desarrollamos las ecuaciones en unos ejes moviles, fijos a la base de la viga.
Considerando el equilibrio dinamico de un elemento infinitesimal de viga, como se muestraen la figura 4.2 obtenemos:
Equilibrio en direccion axial:
N − ρAgdx = N + ∂N∂x dx
Integrando la ecuacion diferencial anterior con la condicion de contorno de extremolibre N(L)=0, se obtiene la expresion del esfuerzo axil a una distancia x de la base:
N(x) = ρAg(L− x) (4.3)
Equilibrio en direccion transversal:
ρA∂2y
∂t2=∂V
∂x(4.4)
Equilibrio de momentos:
V dx+Ndy + ∂M∂x dx = 0

CAPITULO 4. MODELADO DEL “INDIAN WIRE”. 23
Figura 4.2: Equilibrio de un elemento diferencial de una viga que vibra en direccion transver-sal.
Dividiendo en la ecuacion anterior por dx, obtenemos la siguiente ecuacion diferencial:
V +N∂y
∂x+∂M
∂x= 0 (4.5)
4.2.2. Efecto de la excitacion armonica sobre las ecuaciones del modelo.
Las frecuencias naturales de vibracion longitudinal de una viga son del orden de: ωnl ∼ 1L
√Eρ .
Mientras que el orden de mangnitud de las frecuencias naturales de vibracion transversalviene dado por: ωnt ∼ 1
L2
√EIρA
Dividiendo una entre otra, considerando una viga muy esbelta (Lt/L 1), y teniendo encuenta que I ∼ L4
t y que A ∼ L2t , se obtiene que ωnl
ωnt∼ L
Lt>> 1
Es decir, en el caso de una viga muy esbelta, las frecuencias naturales de vibracion longi-tudinal son de un orden de magnitud mucho mayor que las correspondientes en direcciontransversal.
En los experimentos de Mullin, la frecuencia de excitacion de la base llega como maximoa 35 Hz, que representa una frecuencia de excitacion del orden de la frecuencia natural deltercer o el cuarto modo de vibracion transversal de la viga. Por tanto, podemos afirmar quela frecuencia de excitacion de la base en los experimentos es en todo momento de un ordende magnitud muy inferior a las frecuencias naturales de vibracion axial de la viga, por lo queno producira en ningun caso resonancia axial. Es decir: ωnL >> ω.
Esta hipotesis permite considerar que, en un instante determinado, todos los puntos de laviga tienen la misma velocidad y aceleracion en direccion axial. Es decir, el movimientovertical de la base se transmite “instantaneamente” a todos los puntos de la viga.

CAPITULO 4. MODELADO DEL “INDIAN WIRE”. 24
Por ello, el efecto del movimiento armonico de la base ∆ sinωt sobre cada punto de la vigapuede considerarse como el de una aceleracion que se superpone a la de la gravedad. Se empleapor tanto en el modelo de aquı en adelante una gravedad “modificada” en las ecuaciones,que viene dada por:
g∗ = g + ∆ω2 sinωt (4.6)
4.2.3. Relaciones constitutivas. Modelado del amortiguamiento interno.
Para cerrar el conjunto de ecuaciones deben anadirse las relaciones constitutivas, que vienende la propiedad elastica del material. Recordando las hipotesis asumidas de que el material dela viga es homogeneo e isotropo, dichas relaciones pueden escribirse en terminos del momentoflector M y de la curvatura κ de cada seccion. Se asume que en la situacion inicial en reposola viga es recta.
Ya se ha comentado en varias ocasiones que el amortiguamiento interno juega un papel esen-cial en el comportamiento de la columna. Dicho amortiguamiento puede modelarse utilizandoun modelo de amortiguamiento viscoso equivalente.
Asumiendo que el material de la columna es viscoelastico, y siguiendo el desarrollo deValverde [17] el amortiguamiento viscoso se introduce en las relaciones constitutivas en laforma:
M = EI(κ+ γκ) (4.7)
Por otra parte, gracias a las hipotesis realizadas en el modelo, la curvatura de cada puntode la viga puede expresarse en funcion de los desplazamientos transversales de la misma enforma lineal:
κ =∂2y
∂x2(4.8)
Combinando las ecuaciones 4.7 y 4.8, se obtiene la siguiente expresion para la relacion con-stitutiva del material:
M = EI(∂2y
∂x2+ γ
∂2y
∂x2) (4.9)
4.2.4. Ecuacion diferencial del movimiento transversal de la viga.
Combinando las ecuaciones 4.3, 4.4, 4.5, 4.6 y 4.9 se obtiene la ecuacion diferencial quecaracteriza las vibraciones transversales de la columna:
ρA∂2y
∂t2+ EI
∂4y
∂x4+ EIγ
∂4y
∂x4+
∂
∂x[ρA(g + ∆ω2 sinωt)(L− x)
∂y
∂x] = 0 (4.10)
Se trata de una ecuacion diferencial en derivadas parciales de cuarto orden en x y de segundoorden en t, desarrollada en los ejes moviles solidarios a la viga.
Para resolver esta ecuacion es necesario imponer unas condiciones de contorno e inicialesadecuadas.
Las condiciones de contorno a tener en cuenta son:

CAPITULO 4. MODELADO DEL “INDIAN WIRE”. 25
En la base (x=0) la viga se asume que esta empotrada al soporte que oscila con unaamplitud ∆ y una frecuencia ω. Tanto el desplazamiento transversal de la viga comoel giro estan restringidos. y(0, t) = y′(0, t) = 0;
En el otro extremo (x=L) la condicion de contorno es la de extremo libre. El flector, elaxil y el cortante son nulos en este punto, por lo que utilizando la ley de comportamientodel material y la ecuacion de equilibrio de momentos, se tiene que:
y′′(L, t) = y′′′(L, t) = 0,
donde ()′ = ∂∂x() denota derivada parcial respecto al espacio y () = ∂()
∂t , derivada parcialrespecto al tiempo. En adelante utilizaremos esta notacion para mayor simplicidad.
En cuanto a las condiciones iniciales, consideramos que en el instante inicial se parte de lasolucion recta, y(x, 0) = 0, y que la barra esta en reposo, y(x, 0) = 0.
Comparando la ecuacion 4.10 de este modelo con las ecuaciones 4.1 y 4.2 de los modelosanteriores, se puede afirmar que la ecuacion de este modelo es similar a la 4.1, pero anadiendoel termino de amortiguamiento interno, e identica a la 4.2 del lımite continuo del sistema deN pendulos.
En cuanto a los enfoques utilizados para la resolucion del problema, en cada modelo se utilizauno diferente:
En el modelo de la ecuacion 4.1 se aplican directamente diversas tecnicas numericassobre la ecuacion diferencial, sin discretizarla.
En el modelo de N pendulos se parte directamente de un sistema discreto, y tomando Nsuficientemente grande se trata de aproximar el comportamiento del sistema continuo.
En el modelo propuesto, como se vera mas adelante, se parte de la ecuacion diferencialoriginal y se discretiza utilizando analisis modal, convirtiendo la complicada tarea deanalizar una ecuacion diferencial en derivadas parciales en el tiempo y en el espacio,en la de estudiar unas pocas ecuaciones diferenciales ordinarias que recogen la mayorparte de la dinamica del sistema.
4.2.5. Adimensionalizacion de la ecuacion diferencial.
Las ecuacion 4.10, que constituye la ecuacion en derivadas parciales que gobierna la dinamicatransversal de la columna, puede adimensionalizarse escalando las variables de acuerdo a:
x =x
L; y =
y
L; t = tω; ω =
√EI
ρAL4; (4.11)
G =g
ω2L; ∆ =
∆L
; Ω =ω
ω; Γ = ωγ; (4.12)
donde ω se corresponde con la primera frecuencia natural de vibracion transversal de unaviga, en ausencia de cargas externas y de amortiguamiento.
Siguiendo el proceseo de adimensionalizacion se obtiene la siguiente ecuacion adimensional(donde las barras se han suprimido por mayor simplicidad):

CAPITULO 4. MODELADO DEL “INDIAN WIRE”. 26
y + yIV + ΓyIV + [(G+ ∆Ω2Sin(Ωt)(1− x)y′]′ = 0 (4.13)
La version adimensional de las condiciones de contorno es:
y(0, t) = y′(0, t) = 0;
y′′(1, t) = y′′′(1, t) = 0.
En cuanto a las condiciones iniciales, en forma adimensional se escriben como:
y(x, 0) = 0;
y(x, 0) = 0.

Capıtulo 5
Tecnica de solucion aproximada dela ecuacion.
La ecuacion que describe el movimiento del modelo en estudio es una ecuacion en derivadasparciales (PDE), como es usual en las ecuaciones de movimiento de los sistemas continuos.
Para este tipo de ecuaciones en general, y en particular para la de este modelo, no existeuna solucion analıtica exacta, por lo que para su resolucion se debe utilizar algun metodoaproximado que permita convertir la PDE en un conjunto mas manejable de ODEs de ordenmenor.
La sıntesis modal de componentes es una aproximacion simple y practica de convertir unaPDE relacionada con una vibracion en un conjunto de ODEs. Dicha aproximacion tiende ala solucion exacta cuando el numero de modos tiende a infinito.
Para la resolucion aproximada de la ecuacion (4.13) se utilizara el metodo de Galerkin odiscretizacion de Galerkin, en el que las funciones aproximantes no se requiere que seanlos modos de forma asociados al problema de autovalores, sino solo ser funciones test o decomparacion. Dichas funciones test deben satisfacer todas las condiciones de contorno delproblema y ser diferenciables hasta el orden de la ecuacion diferencial.
Naturalmente, para un numero dado de funciones, la exactitud es menor que utilizando lasautofunciones del problema original, pero normalmente estas no se utilizan por ser muydifıciles o imposibles de calcular para un sistema dado. Los requerimientos de las funcionesaproximantes pueden relajarse mucho, por ejemplo satisfacer solo las condiciones de contornogeometricas, o ser cualquier conjunto de funciones que uno cree que pueden representaradecuadamente los movimientos basicos del sistema en consideracion.
El metodo de Galerkin presenta como ventaja principal que opera en terminos de cantidadesmedibles e interpretables, como son las frecuencias naturales y los modos de forma, y permitemodelar la respuesta adecuadamente utilizando unas pocas funciones de discretizacion.
27

CAPITULO 5. TECNICA DE SOLUCION APROXIMADA DE LA ECUACION. 28
5.1. Metodo de Galerkin. Discretizacion espacial.
Para utilizar la discretizacion ordinaria de Galerkin, lo primero es elegir unas funciones deforma adecuadas para el problema en consideracion.
Tratar de obtener las autofunciones exactas de la ecuacion (4.13) carece de sentido, yaque dichas autofunciones, ademas de carecer a priori de expresion analıtica, solo podrıancalcularse numericamente para valores concretos de los parametros del problema. En el casode realizarse continuaciones numericas de un equilibrio variando alguno de los parametrosdel problema, como la longitud (L), la frecuencia (ω) o la amplitud de la excitacion (∆),serıa necesario en cada paso recalcular las autofunciones, lo que complicarıa excesivamentedesde un punto de vista numerico el proceso de continuacion.
Por ello es mucho mas interesante elegir unas funciones aproximantes que sean independien-tes de los parametros del sistema. De esta forma, al realizar continuaciones numericas, losterminos que apareceran en el sistema de ODEs asociados a las funciones aproximantes seranconstantes, y no sera necesario recalcularlos en cada paso del proceso de continuacion.
Volviendo al problema de interes, es logico pensar que una buena aproximacion a las autofun-ciones del problema original es considerar los modos de vibracion del problema de vibracionlibre de una viga empotrada en un extremo y libre en el otro (sin amortiguamiento).
Tambien podrıan utilizarse funciones aproximantes mas simples, como por ejemplo se utilizanen el Metodo de los Elementos Finitos (MEF). Se emplearan las autofunciones del problemade vibracion libre porque la expansion en modos da mas libertad a la hora de elegir elnumero de funciones aproximantes a utilizar. Ademas, los fenomenos de inestabilidad queocurren en el problema estan asociados a la interaccion entre los cuatro primeros modos devibracion de la viga, por lo que probablemente con solo cuatro funciones se obtendra unabuena aproximacion cualitativa a la solucion de la ecuacion original.
La ecuacion diferencial en derivadas parciales que define dicho problema de vibracion simple,en forma adimensional, es:
∂2φ
∂t2+∂4φ
∂x4= 0, (5.1)
con las mismas condiciones de contorno que el problema original.
Utilizando analisis modal, se puede asumir que la solucion de la ecuacion (5.1) puede es-cribirse como:
φ(x, t) =∞∑n=i
φn(x)qn(t), (5.2)
donde qn(t) son funciones del tiempo desconocidas y φn(x) son las autofunciones ortonor-malizadas adimensionales del problema de vibracion libre.
Si se sustituye la expansion (5.2) en la ecuacion (5.1), se llega al siguiente problema deautovalores y autofunciones:
qn(t)φn(x) + qn(t)φIVn (x) = 0, o bien,qn(t)qn(t) = −φIV
n (x)φn(x) = −ω2
n,

CAPITULO 5. TECNICA DE SOLUCION APROXIMADA DE LA ECUACION. 29
siendo ωn las frecuencias naturales del problema.
Teniendo en cuenta las ecuaciones anteriores e imponiendo las condiciones de contorno,obtenemos la siguiente ecuacion que define las autofunciones del problema:
φIVn (x)− ω2nφn(x) = 0, con condiciones de contorno:
φn(0) = φ′n(0) = φ′′n(1) = φ′′′n (1) = 0.
Las autofunciones solucion de la ecuacion anterior vienen dadas por:
φn(x) = cosh(λnx)− cos(λnx)− cosh(λn) + cos(λn)sinh(λn) + sin(λn)
(sinh(λnx)− sin(λnx)), (5.3)
que satisfacen el problema de autovalores φ′′′′n = λ4φn con las mismas condiciones de contornoque “y” en la ecuacion original. Observese que presentan la ventaja ya comentada de nodepender de ninguno de los parametros del sistema.
En esta ecuacion, λn =√ωn es la solucion de la ecuacion de frecuencias cos(λ)cosh(λ)+1 = 0,
para la cual las ocho primeras aproximaciones son [1.875104, 4.694091, 7.854757, 10.99554,14.13717, 17.27876, 20.42034, 23.56193].
Para utilizar la discretizacion de Galerkin, se considera que la solucion de la PDE originalpuede expresarse de forma aproximada en la forma:
y(x, t) =∑k
n=i yn(x)an(t), siendo yn(x) las k primeras autofunciones del problema de vi-bracion libre.
La expansion anterior se inserta en la ecuacion original del problema 4.13. A continuacion,se obtienen k ODEs multiplicando la ecuacion expandida por yi (i=1,...k) e integrando encada ecuacion en la longitud adimensional de la viga (entre 0 y 1). Para ello se integra porpartes, y se utilizan las propiedades de ortogonalidad de las autofunciones yi(x):∫
10y
2i (x)dx = 1,∫
10yj(x)yk(x)dx = 0, y como yIVn (x) = ω2
nyn(x), se tiene que∫
10yi(x)yIVj (x)dx = 0.
De esta forma se obtiene un conjunto de k ecuaciones discretizadas para las amplitudesmodales, que se puede escribir en forma matricial como:
a(t) + ΓDa(t) + [D + (G+ ∆Ω2SinΩt)(P)]a(t) = 0, (5.4)
donde:
a(t) = [a1(t), a2(t), ..., ak(t)] es un vector cuyas componentes son las amplitudes modales(o coeficientes modales), dependientes unicamente del tiempo.
Las matrices D y P recogen las constantes modales.
Las componentes de la matriz diagonal D de dimension k × k vienen dadas por: dii =∫10yi(x)y4
i (x)dx, y las componentes de la matriz simetrica P tambien de dimensionk × k se obtienen como: pij =
∫10yi(x)(y′j(x)(1− x))′dx.
Finalmente se expresa la ecuacion matricial (5.4) como un sistema dinamico, utilizando lasderivadas temporales de las amplitudes modales como nuevas variables, pasando de esta

CAPITULO 5. TECNICA DE SOLUCION APROXIMADA DE LA ECUACION. 30
forma de un sistema de k ecuaciones diferenciales ordinarias de segundo orden a otro de 2kecuaciones de primer orden:
b(t) + ΓDb(t) + [D + (G+ ∆Ω2SinΩt)(P)]a(t) = 0 (5.5)a(t) = b(t) (5.6)
El cumplimiento de las condiciones de contorno queda garantizado porque las autofuncionesyn(x) ya las cumplen de antemano.
Esta ecuacion puede resolverse partiendo de condiciones iniciales especıficas y de valoresinciales de los parametros de continuacion utilizando el software standard AUTO [19]. Esteprograma permitira ademas realizar continuaciones numericas en cualquiera de los paramet-ros del sistema.
Como en cualquier metodo aproximado, la exactitud de la solucion aumenta con el numerok de funciones incluidas en la expansion. Sin embargo, ya que la respuesta esta tipicamentedominada por los modos mas bajos, se obtiene normalmente buena exactitud incluyendotodos los modos que tengan frecuencias naturales mas bajas y similares a la frecuencia deexcitacion.
Esta tecnica de aproximacion utilizada por ejemplo en [16], proporciona resultados que seaproximan en general muy bien a los resultados experimentales en el caso de vibracionesde sistemas continuos, incluso cuando la frecuencia de excitacion es proxima a una de lasfrecuencias de resonancia del sistema. Por eso es muy util para demostrar si el modelo originalincluye o no las caracterısticas fısicas de importancia primaria.

Capıtulo 6
Estudio de la estabilidad de lasolucion recta.
En esta seccion se estudia la estabilidad de la solucion recta al variar distintos parametrosdel sistema. El objetivo es explicar la estabilizacion del cable de cortina en una franja defrecuencias determinada para longitudes superiores a la crıtica, y su desestabilizacion estatica(ω < ω1) y dinamica (ω > ω2) fuera de dicha franja. Ademas, se estudiara el efecto de lavariacion de diferentes parametros sobre el comportamiento del sistema.
Para estudiar la estabilidad de la columna en posicion vertical se utilizara el software AUTO[19], el cual perimitira realizar continuaciones numericas del equilibrio de la solucion trivial.
6.1. Metodo numerico.
El punto incial para AUTO sera la solucion vertical, la cual se representa como una solucionperiodica de un sistema no autonomo de ODEs: a = (a1, a2, ..., ak) = (0, 0, ..., 0) y b =(b1, b2, ...bk) = (0, 0, .., 0).
Seguidamente se continua esta solucion variando uno de los parametros de las ecuaciones.Al hacer esto es posible monitorizar los multiplicadores de Floquet caracterısticos y localizarcon exactitud los puntos de bifurcacion.
Una vez que se alcanza un punto de bifurcacion, en determinadas condiciones sera interesantecontinuarlo en dos parametros y determinar las regiones de estabilidad del sistema.
Alternativamente, pueden desarrollarse estudios en el caracter espacial y temporal del modoque se esta bifurcando pidiendo a AUTO que cambie de rama en el BP. Sin embargo, comose esta utilizando un modelo lineal de la viga, no se puede detectar comportamiento no-linealcomo la super o subcriticidad de la bifurcacion o cualquier bifurcacion secundaria.
31

CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 32
6.2. Parametros de continuacion.
Aunque se hayan obtenido las ecuaciones del problema en forma adimensional, a la horade buscar concordancia cualitativa y cuantitativa con los experimentos de Mullin interesautilizar parametros con dimensiones fısicas para las continuaciones. En concreto son cincolos parametros elegidos:
Los dos parametros que se hacen variar en los experimentos de Mullin: la longitud dela viga (L) y la frecuencia de la excitacion de la base (υ) en Hz. (υ = ω
2π ).
La amplitud de la vibracion (∆), que es constante (e igual a 1.1 cm.) en los experi-mentos, pero cuya efecto sobre el diagrama de bifurcaciones L− υ se estudiara poste-riormente.
El coeficiente de amortiguamiento interno del material (γ), fundamental en el compor-tamiento dinamico del sistema.
Un nuevo parametro σ, que se define como σ = EIρA y que, para un determinado material
y tipo de seccion transversal caracteriza la dimension de la misma (σ ∼ cteL2t ).
Se puede demostrar facilmente que la ecuacion 4.13 y por tanto la 5.6 puede escribirse enfuncion de estos cinco parametros.
6.3. Eleccion de los parametros para reproducir los experi-mentos de Mullin.
El objetivo de esta seccion sera determinar los valores de los parametros σ y γ que mejorpermitan ajustar el diagrama de bifurcaciones L−υ del modelo al del expermiento de Mullin,para una amplitud ∆ fija e igual a 1.1 cm. En todo momento se estudia el equilibrio de lasolucion recta.
6.3.1. Eleccion del parametro σ. Ajuste de la longitud crıtica de pandeoestatico.
En primer lugar se van a determinar las propiedades del material y de la seccion de una vigaelastica-lineal, recogidas en el parametro σ, para que dicha viga tenga la misma longitudcrıtica de pandeo estatico que el cable de cortina (55.3 cm).
Para ello en la solucion inicial de AUTO se parte de los siguientes valores de los parametros:
L0=0.553 m.;
∆0=0 m. (en el caso estatico la amplitud de vibracion es nula);
CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 33
υ0=0.1 Hz. (se puede tomar cualquier valor no nulo ya que, al ser uno de los parametrosde continuacion el periodo de la solucion, si la frecuencia fuera cero el periodo serıainfinito, produciendose un error en la continuacion);
σ0=0.01 (valor muy pequeno de este parametro que corresponde a un filamento muyesbelto que con toda seguridad pandea por su propio peso para la longitud de 0.553m.);
γ0=0.01 (en el caso estatico, el valor del coeficiente de amortiguamiento puede sercualquiera, ya que este parametro solo afecta al comportamiento dinamico del sistema).
El programa AUTO detecta que para la solucion inicial, el numero de multiplicadores deFloquet estables (dentro del cırculo unidad) es 17 (para un total de 18), es decir, el equilibrioes inestable. Al continuar en σ, aumentando el valor de este parametro (lo cual equivale paraun material dado a aumentar la seccion transversal), se alcanza un punto de bifurcacion, enconcreto un BP (Branch Point), a partir del cual el numero de multiplicadores estables pasaa ser 18 (equilibrio estable). El valor crıtico de σ es de 0.212.
Como comprobacion se realiza otra continuacion, partiendo esta vez de L0=0.5 m y deσ0=0.212, manteniendo los mismos valores en los otros tres parametros. Al continuar en lalongitud, aumentando la misma, se detecta un BP para L=0.553 m., pasando en este puntoel equilibrio de estable a inestable. Es decir, se ha conseguido con σ = 0,212 que L=0.553 m.sea la longitud crıtica de pandeo de la viga.
6.3.2. Eleccion del numero de modos y del parametro γ. Ajuste del di-agrama de bifurcacion frecuencia-longitud de los experimentos deMullin.
Para el caso dinamico, la primera eleccion a realizar sera el numero de modos a consideraren el modelo. Como se explico en [14] es la interaccion entre el modo de flexion pura y eltercer modo de vibracion la responsable de la inestabilidad dinamica. Por ello el numero demodos debe ser forzosamente mayor que tres.
Utilizando cuatro o mas modos de vibracion puede demostrarse que los diagramas de bi-furcacion que se obtienen son cualitativamente similares, lo cual tiene sentido porque sonrealmente el primer y el tercer modo los protagonistas de las inestabilidades que ocurren. Altomar un numero mayor de modos lo que se consigue es una mayor aproximacion cuantitativaa la solucion de la PDE. Puede demostrarse que tomando ocho modos, como se ha realizadoen todas las continuaciones del trabajo, el error que se comete respecto a la solucion exactaes muy pequeno.
En el caso estatico la eleccion del numero de modos no era importante, ya que la inestabilidadestatica esta gobernada por el primer modo del sistema.
La segunda eleccion a realizar es el valor del amortiguamiento interno a considerar. Yaha sido comentado en varias ocasiones a lo largo de este trabajo la importancia de dichoamortiguamiento para eliminar todas las inestabilidades del sistema, salvo las mas simples.
Se elegira el valor de γ que permita una mejor aproximacion a los resultados de Mullin encuanto a los regiones de estabilidad e inestabilidad dinamicas. En concreto, puesto que lainestabilidad inferior aparece aunque no se tenga en cuenta el amortiguamiento [12], se va autilizar el valor de γ que mejor aproxime la inestabilidad superior.
CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 34
En los resultados experimentales de Mullin, representados en la figura 3.2, se va a consideraruna longitud supercrıtica de 0.57 m. Para esta longitud los lımites inferior y superior de laregion de estabilidad son ω1=21 Hz. y ω2=28 Hz., respectivamente.
La estrategia sera encontrar el valor de γ para el cual, para una amplitud de excitacion de1.1 cm. y una frecuencia de 28 Hz, aparece en el modelo de la viga un punto de bifurcacion,en concreto una bifurcacion de duplicacion de periodo (PD), que marca la frontera de lainestabilidad dinamica superior, como se obtuvo en [15].
Utilizando esta estrategia, se parte de los siguientes valores iniciales de los parametros parala continuacion con AUTO:
L0=0.57 m.;
∆0=0 m. (partimos de amplitud nula, para que la solucion trivial estatica siga valiendocomo “start point” en AUTO);
υ0=28 Hz.;
σ0=0.212;
γ0=0.008 (valor inicial pequeno del amortiguamiento que se ira aumentando en lacontinuacion hasta encontrar la PD).
Partiendo de esta solucion inicial, se continua en la amplitud (∆) hasta 0.011 m, que equivalea los 2.2 cm de amplitud de pico a pico utilizada en los experimentos de Mullin).
A continuacion, se continua en el parametro γ, observandose que para un valor de 0.0125aparece una PD.
Para comprobar si efectivamente 0.0125 es el valor de γ buscado, se realiza una continuacionen υ partiendo de los siguientes valores de los parametros:
L0=0.57 m;
∆0=0.011 m. (primero hay que partir de amplitud nula, y luego aumentar la amplitudhasta este valor);
υ0=0.1 Hz. (la frecuencia nunca puede ser nula, porque el periodo, que siempre es unparametro de la continuacion, serıa infinito);
σ0=0.212;
γ0=0.0125.
Al continuar en la frecuencia se localizan en el intervalo 0-50 Hz dos puntos de bifurcacion:un BP para ω1 = 15,54Hz y un PD para ω2 = 28,66Hz. Comparando los valores anteriorescon los valores experimentales de 21 y 28 Hz, se observa que al tratar de ajustarnos al lımitesuperior, se comete un error importante en el lımite inferior.
Ademas, en los experimentos de Mullin, tomando una longitud igual a la crıtica de pandeo,la frontera inferior de la region de estabilidad se situa a una frecuencia no nula de aprox-imadamente 16 Hz, en lugar de situarse a una frecuencia de 0 Hz como predice el modelo
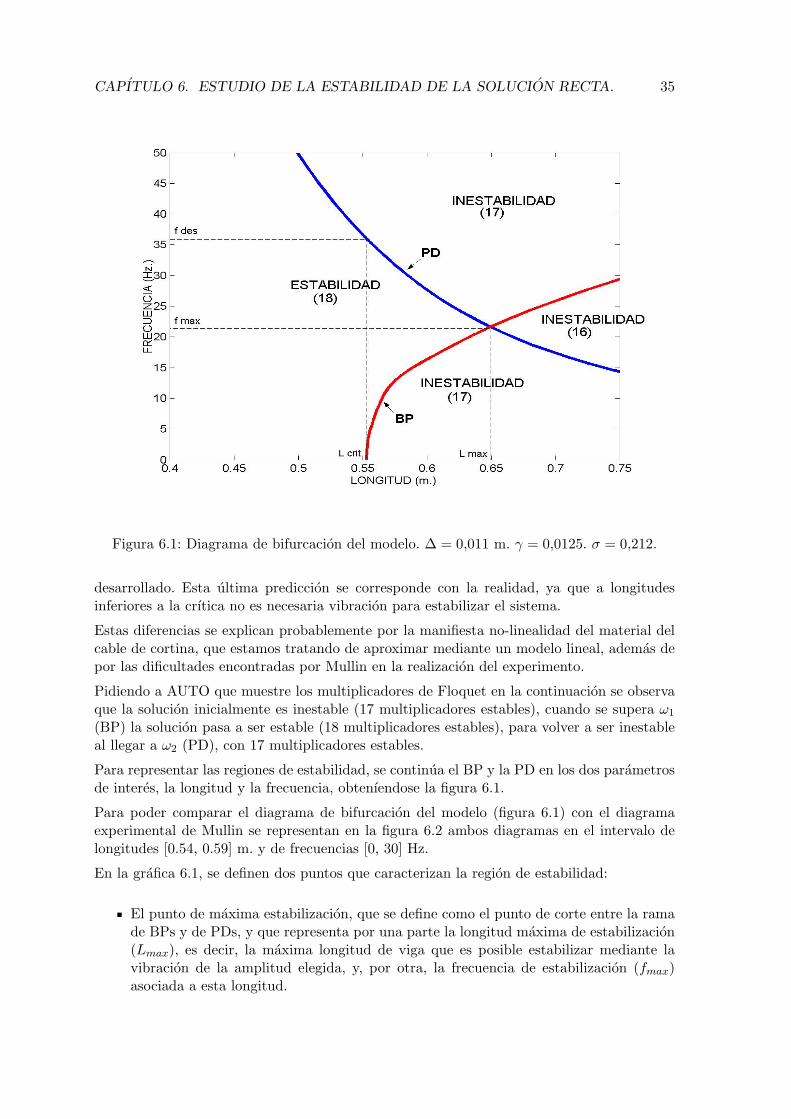
CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 35
Figura 6.1: Diagrama de bifurcacion del modelo. ∆ = 0,011 m. γ = 0,0125. σ = 0,212.
desarrollado. Esta ultima prediccion se corresponde con la realidad, ya que a longitudesinferiores a la crıtica no es necesaria vibracion para estabilizar el sistema.
Estas diferencias se explican probablemente por la manifiesta no-linealidad del material delcable de cortina, que estamos tratando de aproximar mediante un modelo lineal, ademas depor las dificultades encontradas por Mullin en la realizacion del experimento.
Pidiendo a AUTO que muestre los multiplicadores de Floquet en la continuacion se observaque la solucion inicialmente es inestable (17 multiplicadores estables), cuando se supera ω1
(BP) la solucion pasa a ser estable (18 multiplicadores estables), para volver a ser inestableal llegar a ω2 (PD), con 17 multiplicadores estables.
Para representar las regiones de estabilidad, se continua el BP y la PD en los dos parametrosde interes, la longitud y la frecuencia, obtenıendose la figura 6.1.
Para poder comparar el diagrama de bifurcacion del modelo (figura 6.1) con el diagramaexperimental de Mullin se representan en la figura 6.2 ambos diagramas en el intervalo delongitudes [0.54, 0.59] m. y de frecuencias [0, 30] Hz.
En la grafica 6.1, se definen dos puntos que caracterizan la region de estabilidad:
El punto de maxima estabilizacion, que se define como el punto de corte entre la ramade BPs y de PDs, y que representa por una parte la longitud maxima de estabilizacion(Lmax), es decir, la maxima longitud de viga que es posible estabilizar mediante lavibracion de la amplitud elegida, y, por otra, la frecuencia de estabilizacion (fmax)asociada a esta longitud.
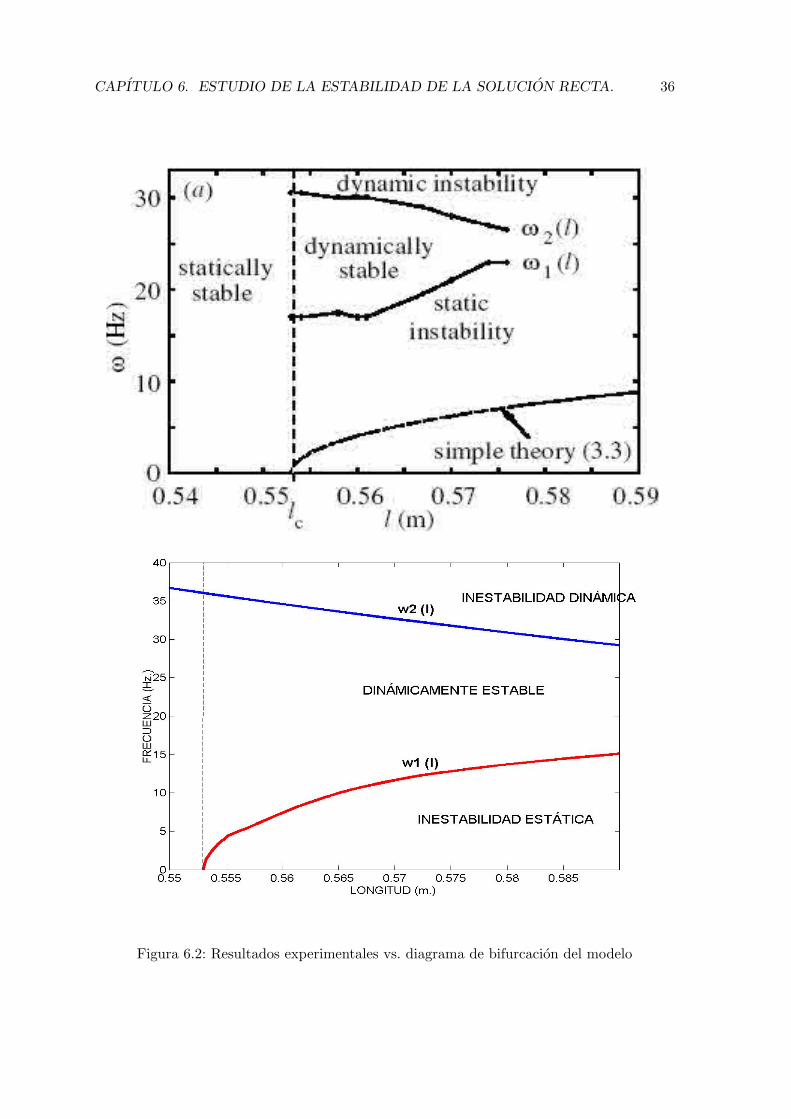
CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 36
Figura 6.2: Resultados experimentales vs. diagrama de bifurcacion del modelo
CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 37
La frecuencia de desestabilizacion (fdes) a la longitud crıtica de pandeo (Lcrit), quese define como la frecuencia a la que se desestabiliza una viga cuya longitud es iguala la crıtica de pandeo, y que caracteriza la amplitud de la franja de frecuencias deestabilizacion de la viga.
6.4. Maxima longitud del “Indian Wire” que es posible esta-bilizar.
Una de las predicciones que realizaron Acheson y Mullin tras realizar los experimentos deestabilizacion de la cadena de tres pendulos fue que, mediante una excitacion de una frecuen-cia lo suficientemente alta y de una amplitud adecuada, serıa posible estabilizar una cuerdaen posicion vertical.
Para analizar si esta afirmacion puede o no ser correcta, en esta seccion se analizara el efectoque tienen la variacion de la amplitud de vibracion, de la seccion transversal de la viga y delcoeficiente de amortiguamiento del mismo sobre el intervalo de frecuencias de estabilizaciony sobre la maxima longitud de viga que es posible estabilizar.
6.4.1. Efecto de la variacion de la amplitud de vibracion.
Para estudiar el efecto que tiene la amplitud de la vibracion, se obtendran los diagramasde bifurcion L-υ para diferentes amplitudes mayores y menores a 1.1 cm, manteniendo con-stantes los valores de los parametros σ y γ.
Para ello, se realiza una continuacion numerica con AUTO partiendo de los siguientes valoresiniciales de los parametros:
L0=0.57 m. (longitud supercrıtica);
υ0=1 Hz. (frecuencia pequena no nula);
∆0=0 m. (hay que partir de amplitud nula, para que la solucion trivial sirva como“start point” de la continuacion);
σ0=0.212;
γ0=0.0125.
El siguiente paso es continuar en la amplitud de vibracion, quedandonos con tres solucionesinteresantes para estudiar el efecto de la variacion de la amplitud de vibracion: las corre-spondientes a amplitudes de 0.005, 0.009 y 0.013 m.
Para cada una de las amplitudes anteriores se realiza una continuacion en la frecuencia de lavibracion υ, determinando el BP y el PD correspondientes a las fronteras de estabilizacionde la viga para esa longitud supercrıtica. Finalmente, se continua para cada amplitud la BPy la PD en dos parametros para trazar dichas fronteras.

CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 38
En la tabla 6.1 se muestra para cada amplitud los valores de Lmax, υmax, υdes y de la longitudrelativa de estabilizacion Lrel, que se define como Lrel = Lmax−Lc
Lc.
Esta magnitud mide, de forma relativa a la longitud crıtica de pandeo, la maxima longitudde viga que una determinada vibracion es capaz de estabilizar. Al ser una magnitud relativase podra, en la siguiente seccion, utilizar esta magnitud para comparar la capacidad deestabilizacion de la vibracion para diferentes valores de la seccion de la viga (y por tantopara diferentes longitudes crıticas de pandeo).
∆ (m.) Lcrit (m.) Lmax (m.) υmax (Hz.) υdes (Hz.) Lrel ( %)0.005 0.553 0.80 66.74 176.8 44.70.009 0.553 0.72 33.03 63.3 30.70.011 0.553 0.65 21.62 36.1 17.50.013 0.553 0.63 18.89 30.1 13.9
Tabla 6.1: Efecto de la amplitud sobre la region de estabilizacion. γ = 0,0125. σ = 0,212
En la figura 6.3 se muestra la region de estabilidad para el caso de una amplitud de vibracionde 0.005 m, practicamente la mitad de la original. Tanto los datos de la tabla 6.1 como lacomparacion de las figuras 6.1 y 6.3 revelan el efecto de la variacion de la amplitud devibracion sobre la region de estabilidad: cuanto menor es la amplitud de vibracion, mayores la longitud de viga que es posible estabilizar, pero las frecuencias necesarias para lograrloson tambien mayores.
En otras palabras, para una determinada longitud mayor que la crıtica, el intervalo de fre-cuencias que permite estabilizar el sistema es mas amplio y se localiza a frecuencias mayores,a medida que disminuye la amplitud.
6.4.2. Efecto de la variacion del area de la seccion transversal de la viga.
El parametro σ (σ = EIρA ) recoge el efecto de la seccion transversal de la viga sobre las
ecuaciones del modelo. Una variacion de la longitud caracterıstica de la seccion transversalde la viga (Lt) provocara una variacion del parametro σ, que vendra dada por:
∆σ ∼ E(∆Lt)4
ρ(∆Lt)2∼ cte(∆Lt)2.
Es decir, σ varıa como el cuadrado de Lt. Por ello, se van a obtener los valores caracterısticosde las regiones de estabilidad para los casos de multiplicar y de dividir por cuatro el parametroσ, lo que equivale a aumentar y a disminuir, respectivamente, Lt.
En ambos casos se mantendran constantes los valores originales del resto de los parametros(∆=0.011 y γ=0.0125). Los resultados obtenidos se muestran en la tabla ??.
σ (Nm3
Kg ) Lcrit (m.) Lmax (m.) υmax (Hz.) υdes (Hz.) Lrel ( %)0.847 0.878 1.11 30.77 60.49 26.40.212 0.553 0.65 21.62 36.10 17.50.053 0.348 0.365 11.22 13.14 4.9
Tabla 6.2: Efecto de la variacion de la seccion transversal sobre la region de estabilizacion.∆ = 0,011 m. γ = 0,0125
Los resultados de la tabla 6.2 revelan que el efecto de aumentar la longitud transversal essimilar al de disminuir la amplitud de la vibracion: la longitud relativa maxima de viga que es

CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 39
Figura 6.3: Diagrama de bifurcacion del modelo. ∆ = 0,005 m. γ = 0,0125. σ = 0,212.
posible estabilizar aumenta cuando lo hace la seccion transversal, al igual que las frecuenciasnecesarias para estabilizar el sistema, y que el ancho de la banda de frecuencias.
6.4.3. Efecto de la variacion del coeficiente de amortiguamiento del ma-terial.
El valor del coeficiente de amortiguamiento interno es caracterıstico del material en cuestion.En la tabla 6.3 se recogen los valores caracterısticos de las regiones de estabilidad para tresvalores de γ, manteniendo constantes la amplitud de vibracion (∆=0.011) y el parametro σ(0.212).
γ (s) Lcrit (m.) Lmax (m.) υmax (Hz.) υdes (Hz.) Lrel ( %)0.01 0.553 0.63 19.87 28.26 13.9
0.0125 0.553 0.65 21.62 36.10 17.50.015 0.553 0.68 24.51 47.68 23.3
Tabla 6.3: Efecto de la variacion del coeficiente de amortiguamiento interno sobre la regionde estabilizacion. ∆ = 0,011 m. σ = 0,212
El efecto de la variacion del parametro γ sobre las ecuaciones del modelo aparece reflejadoen la tabla 6.3. Aumentar el coeficiente de amortiguamiento, aumentar el area de la secciontransversal o disminuir la amplitud de la vibracion tienen cualitativamente el mismo efectosobre la region de estabilidad del sistema.

CAPITULO 6. ESTUDIO DE LA ESTABILIDAD DE LA SOLUCION RECTA. 40
Figura 6.4: Diagrama de bifurcacion ampliado para longitudes subcrıticas. ∆ = 0,011 m.γ = 0,0125. σ = 0,212.
6.5. Desestabilizacion del “Indian Wire” a longitudes sub-crıticas.
En todos los diagramas de bifurcaciones L − υ representados, como por ejemplo el de lafigura 6.1, se observa que a longitudes inferiores a la crıtica de pandeo existe una frecuenciacrıtica que, si es superada, tiene como efecto la desestabilizacion del equilibrio de la solucionrecta. Es la continuacion de la rama de PDs en la region de longitudes subcrıticas la quemarca dicha frontera.
Es decir, al igual una vibracion adecuada es capaz de estabilizar la viga a longitudes super-crıticas, donde en ausencia de vibracion la solucion recta de la viga es inestable, tambienotro tipo de vibracion puede conseguir que a longitudes subcrıticas, donde en ausencia devibracion la posicion vertical es estable, se desestabilice el sistema.
En la figura 6.4 se representa el diagrama de bifurcacion de la figura 6.1 ampliado paralongitudes subcrıticas. Se observa que a medida que se intenta desestabilizar longitudesmenores de viga, las frecuencias requeridas son cada vez mayores.
El modelo desarrollado predice que sea cual sea la longitud de viga considerada, se puededesestabilizar utilizando una frecuencia de excitacion suficientemente elevada.
Capıtulo 7
Conclusiones y recomendacionespara futuras investigaciones.
Este modelo presenta como principal ventaja sobre el utilizado en [12] y [14] que incluye elefecto del amortiguamiento del material, que sı fue tenido en cuenta sin embargo en [15].Hay dos razones que hacen atractivo a este modelo frente a los tres anteriores para el estudiodel problema:
Puesto que es un fenomeno de resonancia entre diferentes modos de vibracion el queparece ser el causante de la inestabilidad del sistema a alta frecuencia, la utilizacionde una descripcion modal permite plantear el problema en funcion de las “entidades”(modos) que estan interactuando.
Este modelo no presenta el problema de condicionamiento numerico que aparece en [15]al aumentar el numero de pendulos N por encima de un determinado valor. De hecho,cuanto mayor es el numero de modos, mejor es la aproximacion obtenida. Ademas,el sistema de ecuaciones final a analizar mediante tecnicas de bifurcaciones es de unadimension del orden de cuatro veces menor que el utilizado en [15] para obtener unabuena aproximacion de la solucion de la ecuacion original.
En el estudio del artıculo [15] se obtuvo un diagrama de bifurcaciones (figura 3.3) en el queaparece una rama de BP y otra de PD, marcando las frontera de la region de estabilidad.Estas ramas parece que se van aproximando al aumentar la longitud, pero el modelo noproporciona informacion sobre lo que ocurre realmente para longitudes mucho mayores quela crıtica.
El modelo desarrollado ha permitido descubrir lo que ocurre realmente para longitudes may-ores que la crıtica: la rama de BP y la de PD se van acercando hasta que llega un momentoen que se cortan, determinando la maxima longitud de viga que es posible estabilizar.
Las principales conclusiones de esta investigacion las constituyen las respuestas a las trespreguntas formuladas en el inicio del trabajo:
Este modelo predice que es posible estabilizar una viga (o cuerda) con una longitudmayor que la crıtica. Cuanto mayor sea la longitud de la cuerda a estabilizar por encima
41

CAPITULO 7. CONCLUSIONES Y RECOMENDACIONES PARA FUTURAS INVESTIGACIONES.42
de la crıtica de pandeo, menor sera la amplitud necesaria para ello y mayor sera lafrecuencia requerida. Una vez que se elige una amplitud de vibracion que permite quela longitud de la cuerda sea menor que la longitud de maxima estabilizacion, existe unintervalo de frecuencias en el que la solucion vertical sera estable. Por tanto, el modelopredice que la primera parte del “Indian Rope Trick” puede realizarse, como pensabanAcheson y Mullin.
El efecto de disminuir la amplitud de vibracion, de aumentar la seccion transversalo de aumentar el amortiguamiento interno del material sobre la region de estabilidades similar. Se produce en todos los casos un aumento de la longitud relativa maximade viga que es posible estabilizar, ademas de un aumento en las frecuencias necesariaspara estabilzar el sistema, y del ancho de la banda de region de estabilidad de lasfrecuencias.
Cualquier viga de longitud inferior a la crıtica de pandeo se desestabiliza cuando lafrecuencia de excitacion supera un cierto valor crıtico. A menor longitud respecto a lacrıtica de pandeo mayor es la frecuencia necesaria.
Todas las conclusiones anteriores se han extraıdo del estudio de un modelo de una vigaque es capaz de reproducir con bastante exactitud los experimentos de Mullin. No obstante,como en todo modelo, las conclusiones deberıan contrastarse mediante experimentacion.Mas todavıa cuando se ha utilizado un modelo lineal para predecir el comportamiento demateriales manifiestamente no-lineales, como cables o cuerdas.
No se ha intentado incluir en el trabajo consideraciones sobre no-linealidades para el sistemade la cuerda en estudio, ya que con el modelo lineal se ha encontrado un poder predictivobastante bueno. Para otros sistemas, las no-linealidades pueden afectar significativamente alas vibraciones de alta frecuencia.
En los diagramas representados se manejan en algunos casos frecuencias muy elevadas. Parapoder reproducir los resultados obtenidos mediante experimentacion sera necesario estudiarla frecuencias capaces de proporcionar los dispositivos existentes en el mercado. Tambiensera necesario tener en cuenta que a frecuencias muy elevadas podrıan excitarse modos devibracion longitudinales de la viga.
Como investigaciones futuras se propone:
Contrastar las conclusiones obtenidas desarrollando experimentos similares a los deMullin. Serıa interesante realizar dichos experimentos tanto con el cable de cortinacomo con algun material lineal, lo que permitira comprobar si el modelo propuesto seajusta mejor a los resultados de este ultimo que a los de un material no-lineal, comoes de esperar.
Incluir el efecto de la no-linealidad del material en las ecuaciones del modelo, paratratar de obtener una mejor aproximacion cuntitativa con los experimentos de Mullin.
Desarrollar un modelo que incluya ademas no-linealidades geometricas y que permitaanalizar la estabilidad de otras soluciones que no sean la recta.

Bibliografıa
[1] Greenhill, A.G. 1881 “Determination of the greatest height consistent with stability thata pole or mast can be made....” Proceedings of the Cambridge Philosophical Society, IV.(Oct. 25, 1880–May 28, 1883), pp. 65–73.
[2] Stephenson, A. 1908 “On a new type of dynamical stability” Mem. Proc. Manch. Lit.Phil. Soc., 52, 1-10.
[3] Kapitza, PL. 1951 “Dynamic stability of a pendulum with an oscillating point of sus-pension” Zurnal Eksperimentalnoj i Teoreticeskoj Fiziki, 21(5), 588-597 (en ruso).
[4] Acheson, D.J. 1993 “A pendulum theorem.” Proc. Roy. Soc. Lond. A443, 239–245.
[5] Otterbein, S. 1982 “Stabilisierung des n-Pendels und der Indische Seiltrick.” Arch. Ra-tion. Mech. Analysis. 78, 381–393.
[6] Levi, M. & Weckesser, W. 1995 “Stabilization of the inverted linearized pendulum byhigh frequency vibrations” SIAM Review, Vol. 37, No. 2, 219-223.
[7] Levi, M. 1999 “Geometry and physics of averaging with applications” Physica D, 132,150-164.
[8] Hurst, C.A. 1996 “The Indian rope trick explained.” Aust. Math. Soc. Gazette. 23,154-159.
[9] Acheson, D.J. & Mullin, T. 1993 “Upside-down pendulums.” Nature, Lond. 366, 215–216.
[10] Acheson, D.J. & Mullin, T. 1998 “Ropy magic.” New Scientist, 21 February 1998, 32–33.
[11] Acheson, D.J. 1997 From Calculus to Chaos, An Introduction to Dynamics. OxfordUniversity Press, Oxford.
[12] Champneys, A.R. & Fraser, W.B. 2000 “The ‘Indian rope trick’ for a parametricallyexcited rod: Linearized analysis.” Proc. Roy. Soc. Lond. 456, 553–570.
[13] Mullin, T., Champneys, A.R., Fraser, B.W., Galan, J. & Acheson, D. 2003 “The ’Indianwire trick’ via parametric excitation: a comparison between theory and experiment”Proc. Roy. Soc. Lond. 459 539-546.
[14] Fraser, B.W. & Champneys, A.R. 2001 “The ’Indian rope trick’ for a parametricallyexcited rod; nonlinear and subharmonic analysis.” Subm. to Proc. Roy. Soc. Lond A.
43

BIBLIOGRAFIA 44
[15] Galan, J., Fraser, B.W., Acheson, D. & Champneys, A.R., 2005 “The parametricallyexcited upside-down rod: an elastic jointed pendulum model.” Journal of sound andvibration 280 359-377.
[16] Thompsen, J. J., 2003 “Theories and experiments on the stiffening effect of high-frequency excitation for continuos elastic systems.” Journal of Sound and Vibration260 117-139.
[17] Valverde, J., Escalona, J. L., Dominguez, J., Champneys, A. 2006 “Stability and Bi-furcation Analysis of a Spinning Space Tether.” Journal of Nonlinear Science Vol. 16,No. 5 507-542.
[18] Nayfey, A.H. and Mook, D.T. 1970 Nonlinear Oscillations Wiley Interscience: New York.
[19] Doedel E. J., Paffenroth R. C., Champneys A. R., Fairgrieve T. F., Kuznetsov Y. A.,Sandstede B. and Wang X. J. AUTO 2000: Continuation and bifurcation software forordinary differential equations ( with HomCont).
[20] Strogatz S.H. Nonlinear Dynamics and Chaos. Addison–Wesley: Reading, MA,1994
[21] Thompson J.M.T. and Stewart H.B. Nonlinear dynamics and chaos. John Wiley & Sons,2002.
[22] Thomsen J.J. Vibrations and stability. Springer, 2003.
[23] Marın, G., 2003 “Modelado de un filamento no lineal mediante el formalismo de Cosser-rat; analisis de bifurcaciones estacionarias.” PFC Escuela Superior Ingenieros Sevilla P.4137.
[24] Lago, M. A., 2007 “Stability and Bifurcation of a parametrically excited wire modelledwith Cosserrat fosmalism.” Paper at Eurmoech 483: “Geometrically non-linear vibrationof structures”, Porto
[25] ABAQUS Manual. Getting started with ABAQUS.