Tp3 Control de Robots Noblia
17
Martín Noblía Tp3 Control de Robots 2013 Ingeniería en Automatización y Control Universidad Nacional de Quilmes Ejercicio 1 Determinar el espacio de trabajo alcanzable para el manipulador de 3 brazos de la figura siguiente con (cm), (cm), (cm), , , In [192]: from IPython.core.display import Image In [193]: Image(filename='Imagenes/copy_left.png') In [194]: Image(filename='Imagenes/dibujo_robot2_tp2.png') In [195]: #imports from sympy import * import numpy as np In [196]: #Con esto las salidas van a ser en LaTeX init_printing(use_latex=True) Recordemos que el espacio de trabajo alcanzable es la región espacial a la que el efector final puede llegar, con al menos una orientación. Vamos a desarrollar primero la cinemática directa(como en el tp2) para luego evaluar variando los angulos de articulaciones en los rangos dados y asi obtener el espacio de trabajo alcanzable. = 15.0 L 1 = 10.0 L 2 = 3.0 L 3 0º < < 360º θ 1 0º < < 180º θ 2 0º < < 180º θ 3 Out[193]: Out[194]:
Transcript of Tp3 Control de Robots Noblia

Martín Noblía
Tp3
Control de Robots 2013
Ingeniería en Automatización y Control
Universidad Nacional de Quilmes
Ejercicio 1
Determinar el espacio de trabajo alcanzable para el manipulador de 3 brazos de la figura siguiente con
(cm), (cm), (cm), , ,
In [192]: from IPython.core.display import Image
In [193]: Image(filename='Imagenes/copy_left.png')
In [194]: Image(filename='Imagenes/dibujo_robot2_tp2.png')
In [195]: #imports
from sympy import *
import numpy as np
In [196]: #Con esto las salidas van a ser en LaTeX
init_printing(use_latex=True)
Recordemos que el espacio de trabajo alcanzable es la región espacial a la que el efector final puede llegar, con al
menos una orientación. Vamos a desarrollar primero la cinemática directa(como en el tp2) para luego evaluar
variando los angulos de articulaciones en los rangos dados y asi obtener el espacio de trabajo alcanzable.
= 15.0L1 = 10.0L2 = 3.0L3 0º < < 360ºθ1 0º < < 180ºθ2 0º < < 180ºθ3
Out[193]:
Out[194]:
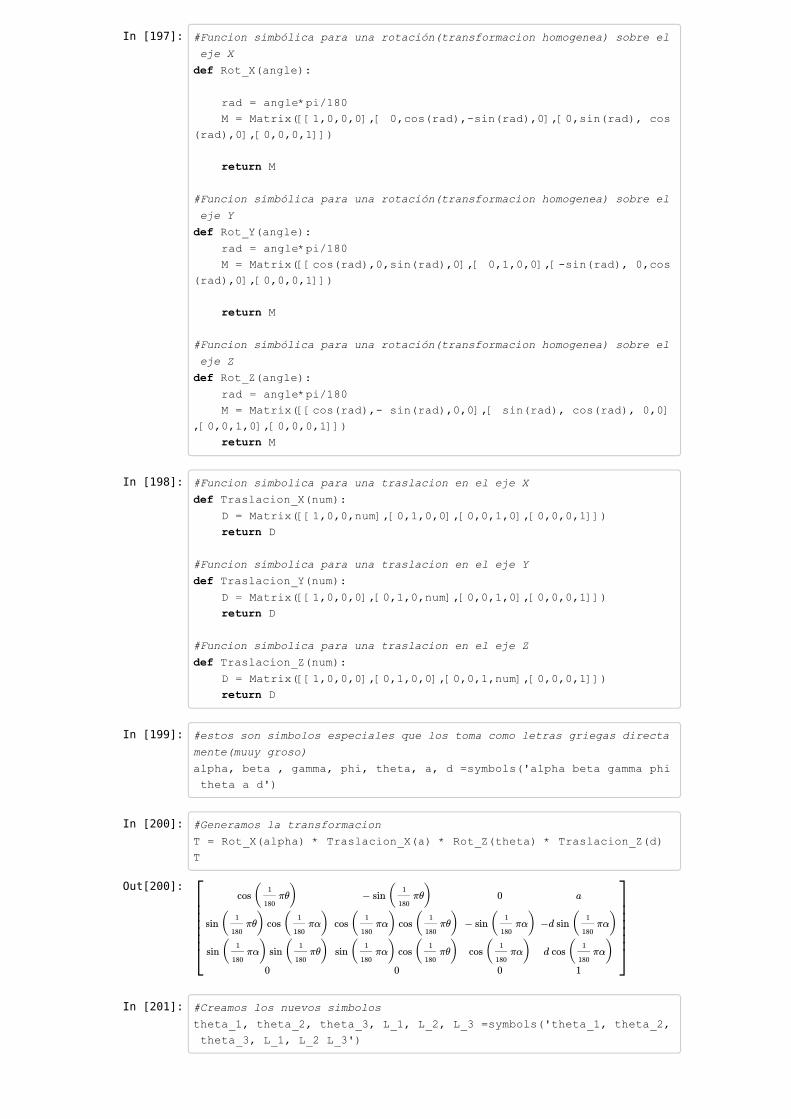
In [197]: #Funcion simbólica para una rotación(transformacion homogenea) sobre el
eje X
def Rot_X(angle):
rad = angle*pi/180
M = Matrix([[1,0,0,0],[ 0,cos(rad),-sin(rad),0],[0,sin(rad), cos
(rad),0],[0,0,0,1]])
return M
#Funcion simbólica para una rotación(transformacion homogenea) sobre el
eje Y
def Rot_Y(angle):
rad = angle*pi/180
M = Matrix([[cos(rad),0,sin(rad),0],[ 0,1,0,0],[-sin(rad), 0,cos
(rad),0],[0,0,0,1]])
return M
#Funcion simbólica para una rotación(transformacion homogenea) sobre el
eje Z
def Rot_Z(angle):
rad = angle*pi/180
M = Matrix([[cos(rad),- sin(rad),0,0],[ sin(rad), cos(rad), 0,0]
,[0,0,1,0],[0,0,0,1]])
return M
In [198]: #Funcion simbolica para una traslacion en el eje X
def Traslacion_X(num):
D = Matrix([[1,0,0,num],[0,1,0,0],[0,0,1,0],[0,0,0,1]])
return D
#Funcion simbolica para una traslacion en el eje Y
def Traslacion_Y(num):
D = Matrix([[1,0,0,0],[0,1,0,num],[0,0,1,0],[0,0,0,1]])
return D
#Funcion simbolica para una traslacion en el eje Z
def Traslacion_Z(num):
D = Matrix([[1,0,0,0],[0,1,0,0],[0,0,1,num],[0,0,0,1]])
return D
In [199]: #estos son simbolos especiales que los toma como letras griegas directa
mente(muuy groso)
alpha, beta , gamma, phi, theta, a, d =symbols('alpha beta gamma phi
theta a d')
In [200]: #Generamos la transformacion
T = Rot_X(alpha) * Traslacion_X(a) * Rot_Z(theta) * Traslacion_Z(d)
T
In [201]: #Creamos los nuevos simbolos
theta_1, theta_2, theta_3, L_1, L_2, L_3 =symbols('theta_1, theta_2,
theta_3, L_1, L_2 L_3')
Out[200]: ⎡
⎣⎢⎢⎢⎢⎢⎢
cos ( πθ)1
180
sin ( πθ) cos ( πα)1
180
1
180
sin ( πα) sin ( πθ)1
180
1
180
0
− sin ( πθ)1
180
cos ( πα) cos ( πθ)1
180
1
180
sin ( πα) cos ( πθ)1
180
1
180
0
0
− sin ( πα)1
180
cos ( πα)1
180
0
a
−d sin ( πα)1
180
d cos ( πα)1
180
1
⎤
⎦⎥⎥⎥⎥⎥⎥
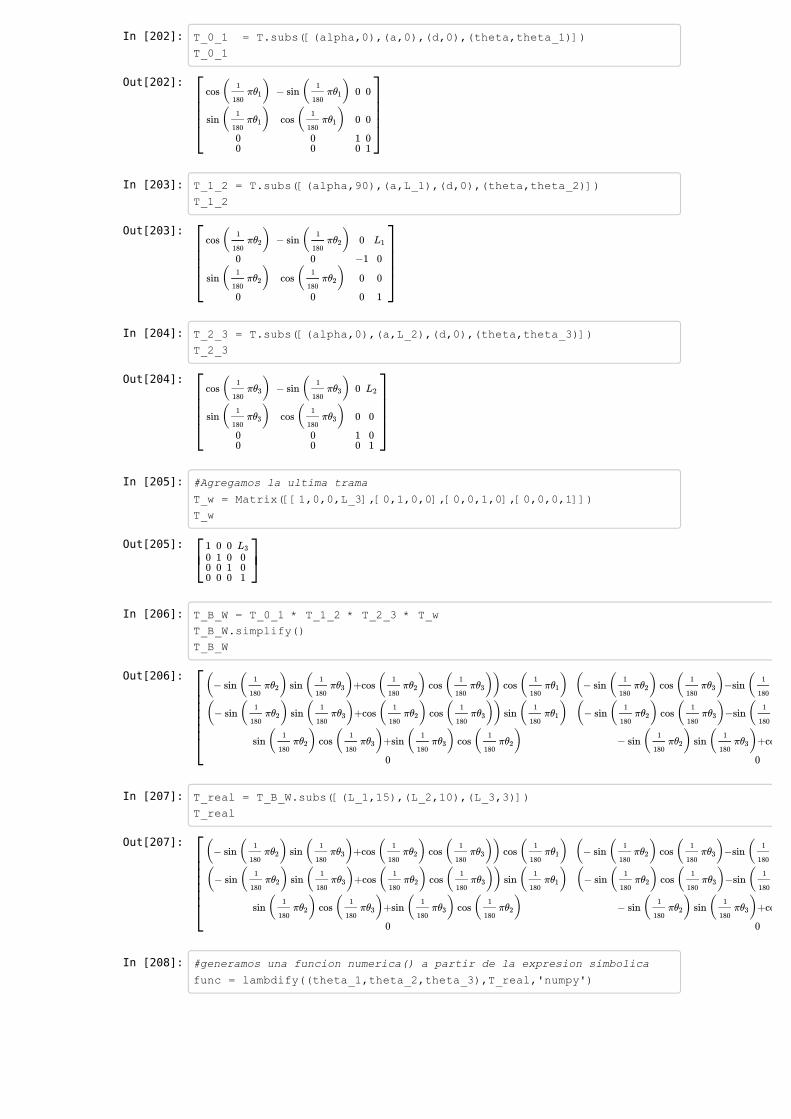
In [202]: T_0_1 = T.subs([(alpha,0),(a,0),(d,0),(theta,theta_1)])
T_0_1
In [203]: T_1_2 = T.subs([(alpha,90),(a,L_1),(d,0),(theta,theta_2)])
T_1_2
In [204]: T_2_3 = T.subs([(alpha,0),(a,L_2),(d,0),(theta,theta_3)])
T_2_3
In [205]: #Agregamos la ultima trama
T_w = Matrix([[1,0,0,L_3],[0,1,0,0],[0,0,1,0],[0,0,0,1]])
T_w
In [206]: T_B_W = T_0_1 * T_1_2 * T_2_3 * T_w
T_B_W.simplify()
T_B_W
In [207]: T_real = T_B_W.subs([(L_1,15),(L_2,10),(L_3,3)])
T_real
In [208]: #generamos una funcion numerica() a partir de la expresion simbolica
func = lambdify((theta_1,theta_2,theta_3),T_real,'numpy')
Out[202]: ⎡⎣⎢⎢⎢
cos ( π )1
180θ1
sin ( π )1
180θ1
00
− sin ( π )1
180θ1
cos ( π )1
180θ1
00
0
0
10
0
0
01
⎤⎦⎥⎥⎥
Out[203]: ⎡⎣⎢⎢⎢
cos ( π )1
180θ2
0
sin ( π )1
180θ2
0
− sin ( π )1
180θ2
0
cos ( π )1
180θ2
0
0
−1
0
0
L1
0
0
1
⎤⎦⎥⎥⎥
Out[204]: ⎡⎣⎢⎢⎢
cos ( π )1
180θ3
sin ( π )1
180θ3
00
− sin ( π )1
180θ3
cos ( π )1
180θ3
00
0
0
10
L2
0
01
⎤⎦⎥⎥⎥
Out[205]: ⎡⎣1000
0100
0010
L3001
⎤⎦
Out[206]: ⎡
⎣⎢⎢⎢⎢⎢⎢
(− sin ( π ) sin ( π )+cos ( π ) cos ( π )) cos ( π )1
180θ2
1
180θ3
1
180θ2
1
180θ3
1
180θ1
(− sin ( π ) sin ( π )+cos ( π ) cos ( π )) sin ( π )1
180θ2
1
180θ3
1
180θ2
1
180θ3
1
180θ1
sin ( π ) cos ( π )+sin ( π ) cos ( π )1
180θ2
1
180θ3
1
180θ3
1
180θ2
0
(− sin ( π ) cos ( π )−sin ( π1
180θ2
1
180θ3
1
180
(− sin ( π ) cos ( π )−sin (1
180θ2
1
180θ3
1
180
− sin ( π ) sin ( π )+cos1
180θ2
1
180θ3
0
Out[207]: ⎡
⎣⎢⎢⎢⎢⎢⎢
(− sin ( π ) sin ( π )+cos ( π ) cos ( π )) cos ( π )1
180θ2
1
180θ3
1
180θ2
1
180θ3
1
180θ1
(− sin ( π ) sin ( π )+cos ( π ) cos ( π )) sin ( π )1
180θ2
1
180θ3
1
180θ2
1
180θ3
1
180θ1
sin ( π ) cos ( π )+sin ( π ) cos ( π )1
180θ2
1
180θ3
1
180θ3
1
180θ2
0
(− sin ( π ) cos ( π )−sin ( π1
180θ2
1
180θ3
1
180
(− sin ( π ) cos ( π )−sin (1
180θ2
1
180θ3
1
180
− sin ( π ) sin ( π )+cos1
180θ2
1
180θ3
0

In [209]: #verificamos si funciona
func(10,30,10)
In [210]: def get_position(q_1,q_2,q_3):
"""
Funcion para extraer la posicion cartesiana de la transformacion
homogenea que describe la cinematica directa del manipulador RRR
espacial(ver ejercicio 2 tp2)
Inputs:
q_1 (angulo del link 1)
q_2 (angulo del link 2)
q_3 (angulo del link 3)
Outputs:
"""
M = func(q_1,q_2,q_3)
arr = np.asarray(M)
x = arr[0,3]
y = arr[1,3]
z = arr[2,3]
return x,y,z
In [211]: #probamos si funciona
L=get_position(10,10,10)
L
In [212]: %pylab inline
plt.rcParams['figure.figsize'] = 12,10
import mpl_toolkits.mplot3d.axes3d as axes3d
Out[209]: [[ 0.75440651 -0.63302222 0.17364818 25.56402113] [ 0.13302222 -0.1116189 -0.98480775 4.50762666] [ 0.64278761 0.76604444 0. 6.92836283] [ 0. 0. 0. 1. ]]
Out[211]: ( )27.2468291343, 4.80435111513, 2.76254220665
Populating the interactive namespace from numpy and matplotlib
WARNING: pylab import has clobbered these variables: ['prod', 'plotting', 'Circle', 'power', 'diag', 'sinh', 'trunc', 'binomial', 'plot', 'eye', 'tan', 'product', 'roots', 'vectorize', 'sin', 'transpose', 'zeros', 'cosh', 'conjugate', 'take', 'beta', 'ones', 'cos', 'interactive', 'solve', 'diff', 'invert', 'tanh', 'Polygon', 'reshape', 'sqrt', 'floor', 'source', 'add', 'multinomial', 'poly', 'mod', 'sign', 'gamma', 'log', 'var', 'seterr', 'flatten', 'nan', 'pi', 'exp', 'test']`%pylab --no-import-all` prevents importing * from pylab and numpy
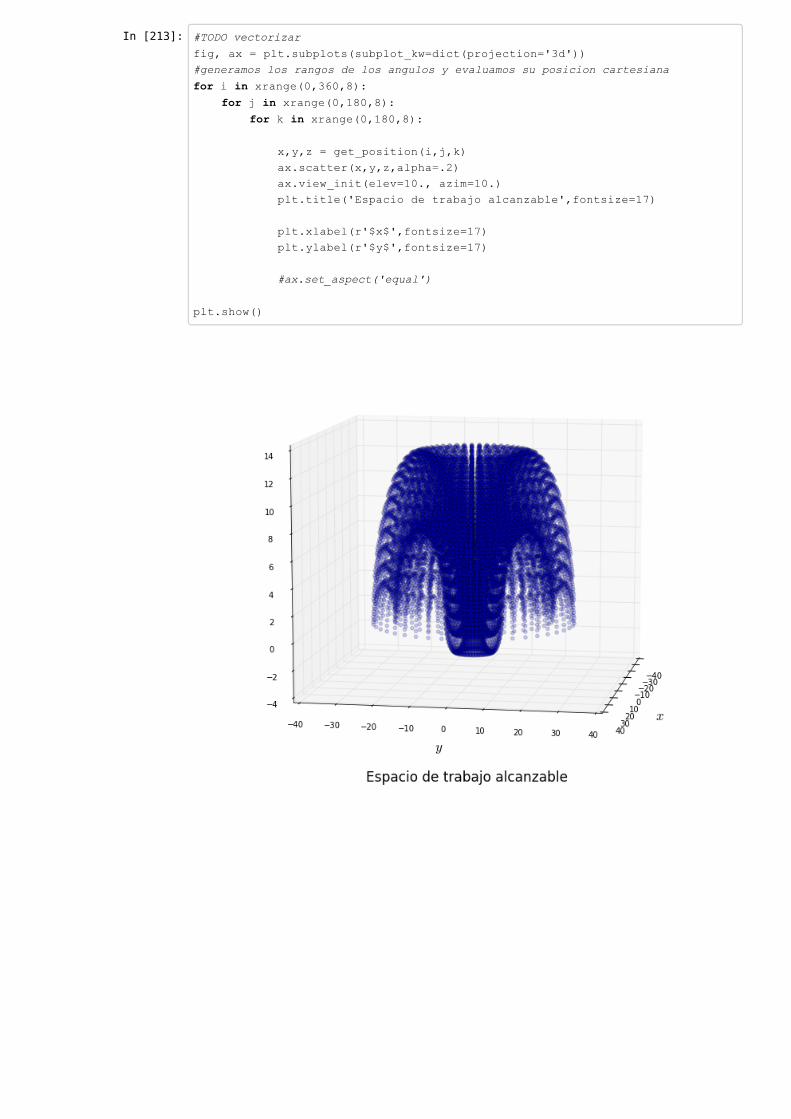
In [213]: #TODO vectorizar
fig, ax = plt.subplots(subplot_kw=dict(projection='3d'))
#generamos los rangos de los angulos y evaluamos su posicion cartesiana
for i in xrange(0,360,8):
for j in xrange(0,180,8):
for k in xrange(0,180,8):
x,y,z = get_position(i,j,k)
ax.scatter(x,y,z,alpha=.2)
ax.view_init(elev=10., azim=10.)
plt.title('Espacio de trabajo alcanzable',fontsize=17)
plt.xlabel(r'$x$',fontsize=17)
plt.ylabel(r'$y$',fontsize=17)
#ax.set_aspect('equal')
plt.show()
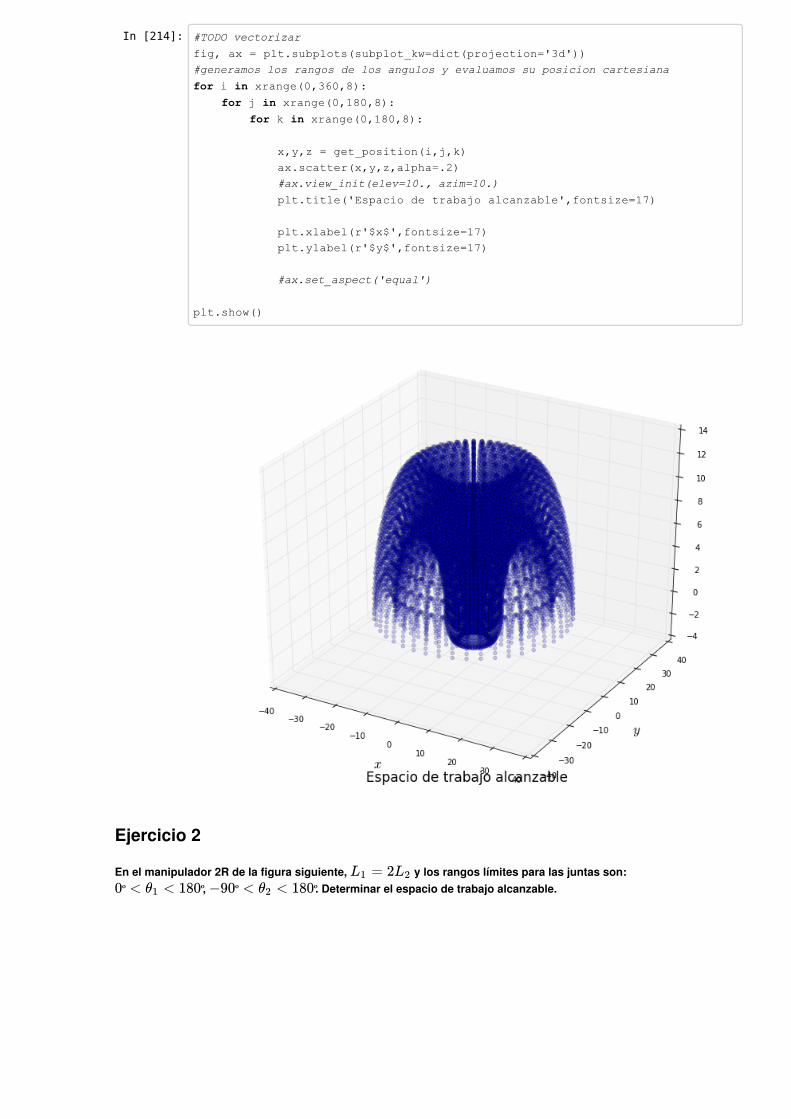
In [214]: #TODO vectorizar
fig, ax = plt.subplots(subplot_kw=dict(projection='3d'))
#generamos los rangos de los angulos y evaluamos su posicion cartesiana
for i in xrange(0,360,8):
for j in xrange(0,180,8):
for k in xrange(0,180,8):
x,y,z = get_position(i,j,k)
ax.scatter(x,y,z,alpha=.2)
#ax.view_init(elev=10., azim=10.)
plt.title('Espacio de trabajo alcanzable',fontsize=17)
plt.xlabel(r'$x$',fontsize=17)
plt.ylabel(r'$y$',fontsize=17)
#ax.set_aspect('equal')
plt.show()
Ejercicio 2
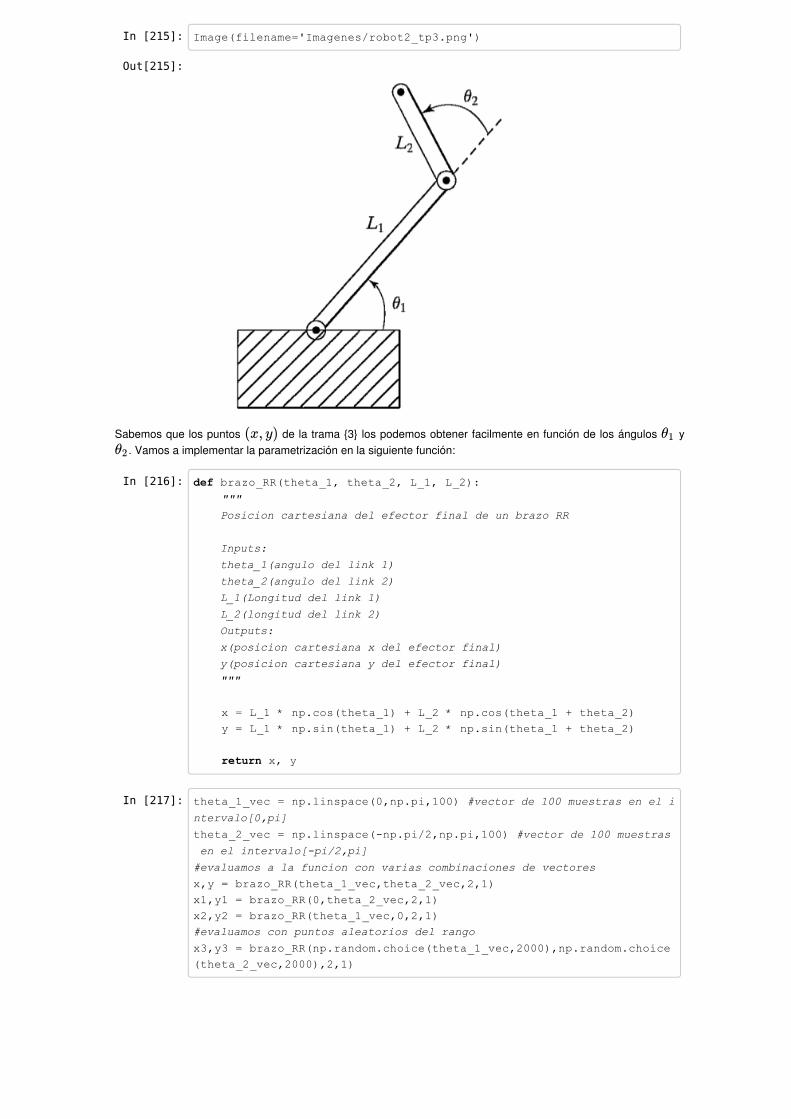
En el manipulador 2R de la figura siguiente, y los rangos límites para las juntas son:
, . Determinar el espacio de trabajo alcanzable.
= 2L1 L20º < < 180ºθ1 −90º < < 180ºθ2
In [215]: Image(filename='Imagenes/robot2_tp3.png')
Sabemos que los puntos de la trama {3} los podemos obtener facilmente en función de los ángulos y
. Vamos a implementar la parametrización en la siguiente función:
In [216]: def brazo_RR(theta_1, theta_2, L_1, L_2):
"""
Posicion cartesiana del efector final de un brazo RR
Inputs:
theta_1(angulo del link 1)
theta_2(angulo del link 2)
L_1(Longitud del link 1)
L_2(longitud del link 2)
Outputs:
x(posicion cartesiana x del efector final)
y(posicion cartesiana y del efector final)
"""
x = L_1 * np.cos(theta_1) + L_2 * np.cos(theta_1 + theta_2)
y = L_1 * np.sin(theta_1) + L_2 * np.sin(theta_1 + theta_2)
return x, y
In [217]: theta_1_vec = np.linspace(0,np.pi,100) #vector de 100 muestras en el i
ntervalo[0,pi]
theta_2_vec = np.linspace(-np.pi/2,np.pi,100) #vector de 100 muestras
en el intervalo[-pi/2,pi]
#evaluamos a la funcion con varias combinaciones de vectores
x,y = brazo_RR(theta_1_vec,theta_2_vec,2,1)
x1,y1 = brazo_RR(0,theta_2_vec,2,1)
x2,y2 = brazo_RR(theta_1_vec,0,2,1)
#evaluamos con puntos aleatorios del rango
x3,y3 = brazo_RR(np.random.choice(theta_1_vec,2000),np.random.choice
(theta_2_vec,2000),2,1)
Out[215]:
(x, y) θ1θ2
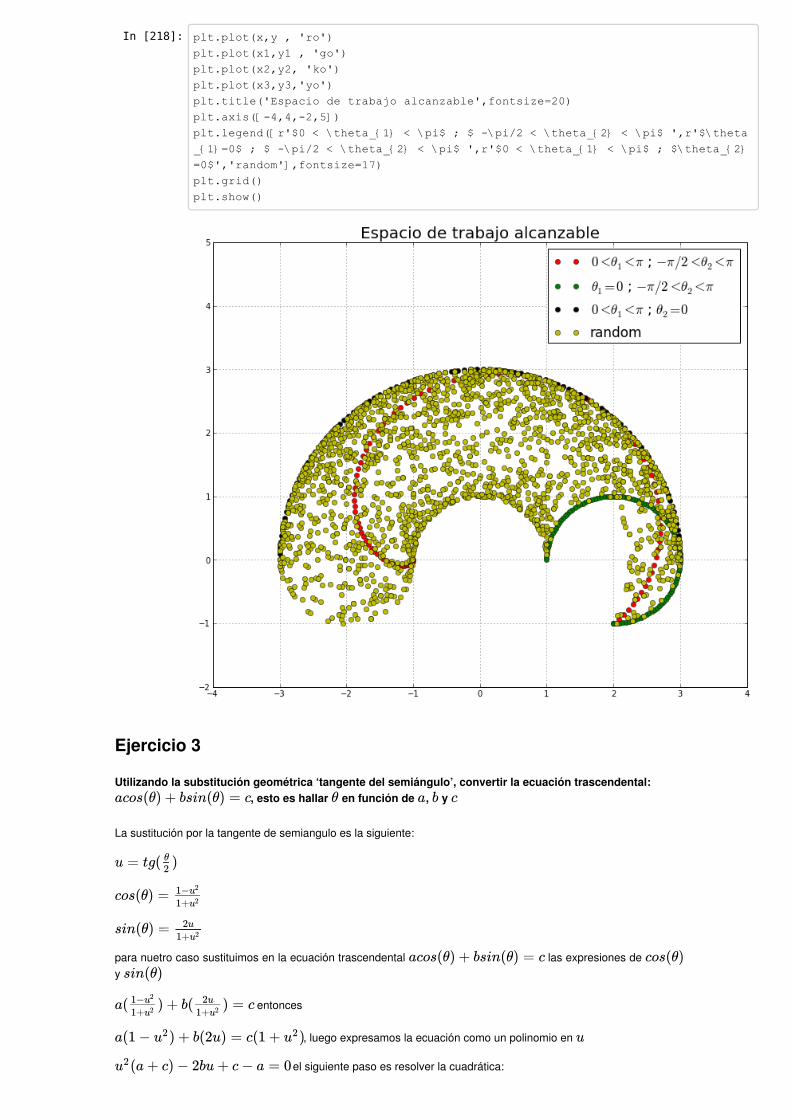
In [218]: plt.plot(x,y , 'ro')
plt.plot(x1,y1 , 'go')
plt.plot(x2,y2, 'ko')
plt.plot(x3,y3,'yo')
plt.title('Espacio de trabajo alcanzable',fontsize=20)
plt.axis([-4,4,-2,5])
plt.legend([r'$0 < \theta_{1} < \pi$ ; $ -\pi/2 < \theta_{2} < \pi$ ',r'$\theta
_{1}=0$ ; $ -\pi/2 < \theta_{2} < \pi$ ',r'$0 < \theta_{1} < \pi$ ; $\theta_{2}
=0$','random'],fontsize=17)
plt.grid()
plt.show()
Ejercicio 3
Utilizando la substitución geométrica ‘tangente del semiángulo’, convertir la ecuación trascendental:
, esto es hallar en función de , y
La sustitución por la tangente de semiangulo es la siguiente:
para nuetro caso sustituimos en la ecuación trascendental las expresiones de
y
entonces
, luego expresamos la ecuación como un polinomio en
el siguiente paso es resolver la cuadrática:
acos(θ) + bsin(θ) = c θ a b c
u = tg( )θ2
cos(θ) = 1−u2
1+u2
sin(θ) = 2u
1+u2
acos(θ) + bsin(θ) = c cos(θ)sin(θ)
a( ) + b( ) = c1−u2
1+u22u
1+u2
a(1 − ) + b(2u) = c(1 + )u2 u2 u
(a + c) − 2bu + c − a = 0u2

Por lo tanto:
Ejercicio 4
Derive la cinemática inversa del robot RRR del ejercicio 2 de la práctica 2.
Si la transformación esta dada entonces hacemos:
y como , podemos escribir:
Además como sabemos del ejercicio 2 de la practica 2:
luego igualamos las componentes de ambas matrices, entonces:
luego igualamos los elementos , entonces:
, como vemos podemos estimar el valor de como:
Continuamos igualando los elementos y :
Entonces vemos que si
o
Luego igualando los elementos
Por último igualando los elementos y
Por lo tanto:
Ejercicio 5
Este ejercicio se enfoca en la solución de la cinemática de planteamiento inverso para el robot planar 3-DOF(tres
u = b± + −b2 a2 c2√a+c
θ = 2t ( )g−1 b± + −b2 a2 c2√a+c
TSW T = T ) T ) )B
W (BS (S
T (WT T −1
T = T )BW (0
3
T =03
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
r11
r21
r31
0
r12
r22
r32
0
r13
r23
r33
0
x
y
z
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
T =03
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
c1c23
s1c23
s23
0
−c1c23
−s1s23
c23
0
s1
−c1
0
0
( + )c1 c2L2 L1
( + )s1 c2L2 L1
s2L2
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥(1, 3)
=s1 r13
(2, 3)
− =c1 r23 θ1
= Atan2( , − )θ1 r13 r23
(1, 4) (2, 4)
x = ( + )c1 c2L2 L1
y = ( + )s1 c2L2 L1
≠ 0c1 ∴ = ( − )c21
L2
xc1
L1
= ( − )c21
L2
y
s1L1
(3, 4) z = s2L2 ∴ = Atan2( ; )θ2z
L2c2
(3, 1) (3, 2)
=s23 r31
=c23 r32
= Atan2( ; ) −θ3 r31 r32 θ2

grados de libertad)(ver ejercicio 1 ). Se proporcionan los siguientes parámetros de longitud fija: ,
,
Derive en forma analítica y a mano, la solución de planteamiento inverso para este robot. Dado ,
calcule todas las múltiples soluciones posibles para
a.
Desarrolle un programa para resolver por completo este problema de cinemática de planteamiento
inverso para el robot planar (es decir, proporcione todas las múltiples soluciones). Pruebe su
programa utilizando los siguientes casos de entrada:
b.
c.
ii.
iii.
iv.
Para todos los casos emplee una comprobación circular para validar sus resultados: introduzca cada conjunto de
ángulos de articulación(para cada una de las múltiples soluciones ) de vuelta en el programa de planteamiento
directo para demostrar que obtiene las matrices
a)
Como sabemos las ecuaciones cinemáticas de este brazo son :
Vamos a suponer una configuración genérica del brazo relativa a la trama base, la cual es . Como estamos
trabajando con un manipulador planar, puede lograrse especificando tres números , en donde es la
orientación del vínculo 3 en el plano(relativo al eje ). Por ello nuestra transformación genérica es:
= 4L1= 3L2 = 2L3
T )(0H
[ , , ]θ1 θ2 θ3
3R
T =0H
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
1
0
0
0
0
1
0
0
0
0
1
0
9
0
0
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
T =0H
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
0.5
0.866
0
0
−0.866
0.6
0
0
0
0
1
0
7.5373
3.9266
0
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
T =0H
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
0
−1
0
0
1
0
0
0
0
0
1
0
−3
2
0
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
T =0H
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
0.866
−0.5
0
0
0.5
0.866
0
0
0
0
1
0
−3.1245
9.1674
0
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
T0H
T ) = T ) =(BW (0
3
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
c123
s123
0
0
−s123
c123
0
0
0
0
1
0
+L1c1 L2c12
+L1s1 L2s12
0
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥T )(B
W
[x, y, ϕ] ϕ
X̂
T ) =(BW
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
cϕ
sϕ
0
0
−sϕ
cϕ
0
0
0
0
1
0
x
y
0
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥

Todos los destinos alcanzables deben encontrarse en el subespacio implicado por la estructura de la ecuación
anterior. Si igualamos las dos matrices llegamos a las siguientes ecuaciones:
Asi si elevamos al cuadrado las últimas dos ecuaciones y las sumamos:
despejando
Entonces, vemos que para que pueda existir una solución el lado derecho de la ecuación anterior debe estar en el
intervalo
Luego suponiendo que se cumple esa condición, podemos hallar el valor del como:
Por último calculamos con la rutina de arco tangente de dos argumentos:
Dependiendo que signo hallamos elegido en la ecuación del corresponderá a una de las dos suluciones
múltiples "codo hacia arriba" o "codo hacia abajo"
Luego podemos resolver para de la siguiente manera:
sean :
en donde:
si llamamos y a entonces podemos escribir:
por lo tanto:
Usando el arreglo de dos elementos:
y por lo tanto :
Finalmente podemos resolver para la suma de a
De este último resultado podemos despejar ya que conocemos el valor de los otros ángulos.
=cϕ c123
=sϕ s123
x = +L1c1 L2c12
y = +L1s1 L2s12
+ = + + 2x2 y2 L21 L2
2 L1L2c2
c2
=c2+ − −x2 y2 L2
1 L22
2L1L2
[−1, 1]
s2
= ±s2 1 − c22
− −−−−√θ2
= Atan2( , )θ2 s2 c2
s2
θ1
x = −k1c1 k2s1
y = +k1s1 k2c1
= +k1 L1 L2c2
=k2 L2s2
r = ± +k21 k2
2
− −−−−−√ γ = Atan2( , )k2 k1
= cos(γ)cos( ) − sin(γ)sin( )xr
θ1 θ1
= cos(γ)sin( ) + sin(γ)cos( )y
rθ1 θ1
cos(γ + ) =θ1xr
sin(γ + ) =θ1y
r
γ + = Atan2( , ) = Atan2( , )θ1y
rxr
k2 k1
= Atan2(y, x) − Atan2( , )θ1 k2 k1
θ1 θ3
+ + = Atan2( , ) = ϕθ1 θ2 θ3 sϕ cϕ
θ3

b)
A continuación desarrolamos una implementación que resuelve la cinemática inversa anterior

In [219]: def inverse_kin(T, L_1, L_2):
"""
Funcion para resolver la cinematica inversa de un manipulador plana
r RRR
Inputs:
T(Matriz de tranformacion homogenea)
L_1(Longitud del link 1)
L_2(Longitud del link 2)
Outputs: Una tupla de 6 elementos con los angulos de las dos config
uraciones
codo arriba o codo abajo
(theta_1,theta_2,theta_3,theta_1_up,theta_2_up,theta_3_up)
"""
x = T[0,3]
y = T[1,3]
#calculamos si el punto es alcanzable
es_alc = (x**2 + y**2 - L_1**2 - L_2**2)/(2*L_1*L_2)
if (-1 <= es_alc <= 1):
print 'es alcanzable'
c_2 = es_alc
#Hay dos soluciones para elegir
s_2_elbow_up = np.sqrt(1-c_2**2)
s_2_elbow_down = -np.sqrt(1-c_2**2)
theta_2_up = np.arctan2(s_2_elbow_up,c_2)
theta_2_down = np.arctan2(s_2_elbow_down,c_2)
#cambio de variables
k_1 = L_1 + L_2*c_2
k_2_up = L_2*s_2_elbow_up
k_2_down = L_2*s_2_elbow_down
gamma_up = np.arctan2(k_2_up,k_1)
gamma_down = np.arctan2(k_2_down,k_1)
r_up = np.sqrt(k_1**2+k_2_up**2)
r_down= np.sqrt(k_1**2+k_2_down**2)
k_1_1 = r_up*np.cos(gamma_up)
k_1_2 = r_down*np.cos(gamma_down)
k_2_1 = r_up*np.sin(gamma_up)
k_2_2 = r_down*np.sin(gamma_down)
theta_1_up = np.arctan2(y,x) - np.arctan2(k_2_1,k_1_1)
theta_1_down = np.arctan2(y,x) - np.arctan2(k_2_2,k_1_2)
c_phi = T[0,0]
s_phi = T[1,0]
phi = np.arctan2(s_phi,c_phi)
theta_3_up = phi - theta_1_up - theta_2_up
theta_3_down = phi - theta_1_down - theta_2_down
fac = 180/np.pi #para pasar a grados
return theta_1_up*fac,theta_2_up*fac,theta_3_up*fac,theta_1_
down*fac,theta_2_down*fac,theta_3_down*fac
else:
print 'No es alcanzable'

Vamos a crear las matrices del enunciado para poder evaluarlas, además tenemos que tener en cuenta que las
transformaciones que nos dan en el enunciado son las que van de la trama base a la Herramienta, por ello
debemos transformarla para que nos quede
Donde :
In [220]: #Matriz de transformacion del insiso i
T_0_H_i = np.array([[1,0,0,9],[0,1,0,0],[0,0,1,0],[0,0,0,1]])
T_0_H_i
In [221]: #Matriz de la transformacion de la trama 3 a la herramienta
T_H_3 = np.array([[1,0,0,2],[0,1,0,0],[0,0,1,0],[0,0,0,1]])
T_H_3
In [222]: #Inversa de la matriz que representa la transformacion de la trama 3 a
la herramienta
T_3_H=np.linalg.inv(T_H_3)
T_3_H
In [223]: #Obtenemos la transformacion que necesitamos
T_0_3_i=np.dot(T_0_H_i,T_3_H)
T_0_3_i
In [224]: #calculamos los angulos(deberia dar cero(ya que en x tenemos la suma de
los L_1, L_2))
angulos_i = inverse_kin(T_0_3_i,4,3)
angulos_i
T = T ) T03 (0
H (H3 )−1
T =H3
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
1
0
0
0
0
1
0
0
0
0
1
0
2
0
0
1
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
Out[220]: [[1 0 0 9] [0 1 0 0] [0 0 1 0] [0 0 0 1]]
Out[221]: [[1 0 0 2] [0 1 0 0] [0 0 1 0] [0 0 0 1]]
Out[222]: [[ 1. 0. 0. -2.] [ 0. 1. 0. 0.] [ 0. 0. 1. 0.] [ 0. 0. 0. 1.]]
Out[223]: [[ 1. 0. 0. 7.] [ 0. 1. 0. 0.] [ 0. 0. 1. 0.] [ 0. 0. 0. 1.]]
es alcanzable
Out[224]: ( )0.0, 0.0, 0.0, 0.0, −0, 0.0

In [225]: #punto ii)
#Cargamos la matriz y repetimos el procedimiento anterior
T_0_H_ii = np.array([[.5,-0.866,0,7.5373],[0.866,0.6,0,3.9266],[0,0,
1,0],[0,0,0,1]])
T_0_H_ii
In [226]: T_0_3_ii = np.dot(T_0_H_ii,T_3_H)
T_0_3_ii
In [227]: #Calculamos los angulos (son 6 tres para una configuracion y tres para la otra)
angulos_ii = inverse_kin(T_0_3_ii,4,3)
angulos_ii
In [228]: #punto iii)
#Cargamos la matriz y repetimos el procedimiento anterior
T_0_H_iii = np.array([[0,1,0,-3],[-1,0,0,2],[0,0,1,0],[0,0,0,1]])
T_0_H_iii
In [229]: T_0_3_iii = np.dot(T_0_H_iii,T_3_H)
T_0_3_iii
In [230]: #Calculamos los angulos (son 6 tres para una configuracion y tres para
la otra)
angulos_iii = inverse_kin(T_0_3_iii,4,3)
angulos_iii
Out[225]: [[ 0.5 -0.866 0. 7.5373] [ 0.866 0.6 0. 3.9266] [ 0. 0. 1. 0. ] [ 0. 0. 0. 1. ]]
Out[226]: [[ 0.5 -0.866 0. 6.5373] [ 0.866 0.6 0. 2.1946] [ 0. 0. 1. 0. ] [ 0. 0. 0. 1. ]]
es alcanzable
Out[227]: ( 9.99989065325, 20.0004358928, 29.9989456731, 27.1143607137, −20.0004358928, 52.8853473983
Out[228]: [[ 0 1 0 -3] [-1 0 0 2] [ 0 0 1 0] [ 0 0 0 1]]
Out[229]: [[ 0. 1. 0. -3.] [-1. 0. 0. 4.] [ 0. 0. 1. 0.] [ 0. 0. 0. 1.]]
es alcanzable
Out[230]: ( )90.0, 90.0, −270.0, 163.739795292, −90.0, −163.739795292

In [231]: #punto iv)
#Cargamos la matriz y repetimos el procedimiento anterior
T_0_H_iv = np.array([[0.866,.5,0,-3.1245],[-.5,0.866,0,9.1674],[0,0,
1,0],[0,0,0,1]])
T_0_H_iv
In [232]: T_0_3_iv = np.dot(T_0_H_iv,T_3_H)
T_0_3_iv
In [233]: angulos_iv = inverse_kin(T_0_3_iv,4,3)
angulos_iv
Ahora vamos a realizar una funcion para verificar circularmente los resultados. Primero generamos la cinemática
directa como en el tp2 simbólicamente y luego la convertimos a numérica gracias a las bondades del lenguaje.
In [234]: #Generamos la cinematica directa del brazo planar RRR
T_0_1 = T.subs([(alpha,0),(a,0),(d,0),(theta,theta_1)])
T_1_2 = T.subs([(alpha,0),(a,L_1),(d,0),(theta,theta_2)])
T_2_3 = T.subs([(alpha,0),(a,L_2),(d,0),(theta,theta_3)])
T_0_3 = T_0_1 * T_1_2 * T_2_3
#Reemplazamos los valores de longitudes de link
T_0_3_real = T_0_3.subs([(L_1,4),(L_2,3)])
In [235]: #generamos una funcion numerica a partir de la simbolica
func_kin = lambdify((theta_1,theta_2,theta_3),T_0_3_real,'numpy')
In [236]: #evaluamos para los primeros tres elementos de la tupla que contiene lo
s angulos de una configuracion
func_kin(angulos_i[0],angulos_i[1],angulos_i[2])
In [237]: #evaluamos para los ultimos tres elementos de la tupla que contiene los
angulos de una configuracion
func_kin(angulos_i[3],angulos_i[4],angulos_i[5])
Out[231]: [[ 0.866 0.5 0. -3.1245] [-0.5 0.866 0. 9.1674] [ 0. 0. 1. 0. ] [ 0. 0. 0. 1. ]]
Out[232]: [[ 0.866 0.5 0. -4.8565] [ -0.5 0.866 0. 10.1674] [ 0. 0. 1. 0. ] [ 0. 0. 0. 1. ]]
No es alcanzable
Out[236]: [[ 1. -0. 0. 7.] [ 0. 1. 0. 0.] [ 0. 0. 1. 0.] [ 0. 0. 0. 1.]]
Out[237]: [[ 1. 0. 0. 7.] [ 0. 1. 0. 0.] [ 0. 0. 1. 0.] [ 0. 0. 0. 1.]]

Back to top
In [238]: #evaluamos para los primeros tres elementos de la tupla que contiene lo
s angulos de una configuracion
func_kin(angulos_ii[0],angulos_ii[1],angulos_ii[2])
In [239]: #evaluamos para los ultimos tres elementos de la tupla que contiene los
angulos de una configuracion
func_kin(angulos_ii[3],angulos_ii[4],angulos_ii[5])
In [240]: #evaluamos para los primeros tres elementos de la tupla que contiene lo
s angulos de una configuracion
func_kin(angulos_iii[0],angulos_iii[1],angulos_iii[2])
In [241]: #evaluamos para los ultimos tres elementos de la tupla que contiene los
angulos de una configuracion
func_kin(angulos_iii[3],angulos_iii[4],angulos_iii[5])
Vemos que vuelven a dar las mismas matrices de transformación
In [241]:
More info on IPython website (http://ipython.org). The code for this site (https://github.com/ipython
/nbviewer) is licensed under BSD (https://github.com/ipython/nbviewer/blob/master/LICENSE.txt). Some icons from
Glyphicons Free (http://glyphicons.com), built thanks to Twitter Bootstrap (http://twitter.github.com/bootstrap/)
This web site does not host notebooks, it only renders notebooks available on other websites. Thanks to all our
contributors (https://github.com/ipython/nbviewer/contributors).
Out[238]: [[ 0.500011 -0.86601905 0. 6.5373 ] [ 0.86601905 0.500011 0. 2.1946 ] [ 0. 0. 1. 0. ] [ 0. 0. 0. 1. ]]
Out[239]: [[ 0.500011 -0.86601905 0. 6.5373 ] [ 0.86601905 0.500011 0. 2.1946 ] [ 0. 0. 1. 0. ] [ 0. 0. 0. 1. ]]
Out[240]: [[ 6.12323400e-17 1.00000000e+00 0.00000000e+00 -3.00000000e+00] [ -1.00000000e+00 6.12323400e-17 0.00000000e+00 4.00000000e+00] [ 0.00000000e+00 0.00000000e+00 1.00000000e+00 0.00000000e+00] [ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
Out[241]: [[ 5.55111512e-17 1.00000000e+00 0.00000000e+00 -3.00000000e+00] [ -1.00000000e+00 5.55111512e-17 0.00000000e+00 4.00000000e+00] [ 0.00000000e+00 0.00000000e+00 1.00000000e+00 0.00000000e+00] [ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]