
Towards Helicopter Tracking CS223b Project #20 Ritchie Lee Yu-Tai Ray Chen.
6
Towards Helicopter Tracking CS223b Project #20 Ritchie Lee Yu-Tai Ray Chen
-
date post
22-Dec-2015 -
Category
Documents
-
view
215 -
download
0
Transcript of Towards Helicopter Tracking CS223b Project #20 Ritchie Lee Yu-Tai Ray Chen.
Towards Helicopter Tracking
CS223b Project #20
Ritchie Lee
Yu-Tai Ray Chen

The Helicopter Tracking Problem
Aerobatic helicopter issues GPS: dependent on antenna direction IMU: integration noise
Visual Tracking Emulate pilot vision Estimate absolute pose

Recover Pose via Planar Homography
Generate a bank of planer marker with known posesRi , Ti and Ni
Record target in motion + generate SIFT features
Feature bank
Obtain SIFT correspondences + remove outliers (RANSAC)
Solve planar Homography:
H=(R+(1/d)*TNT)
Disambiguate R,T,N solutions with knowledge of Ti and Ni
Min ||Nest-RestTNf||
Use marker with most match points
• Rrel, Ri , Trel and Ti calculate pose and position relative to inertial frame• Get Euler or fixed axis angles
Tag target with known planar markers

Results: SIFT Matching
Still frame example/ ~45 degree perspective limitation
Scale invariance
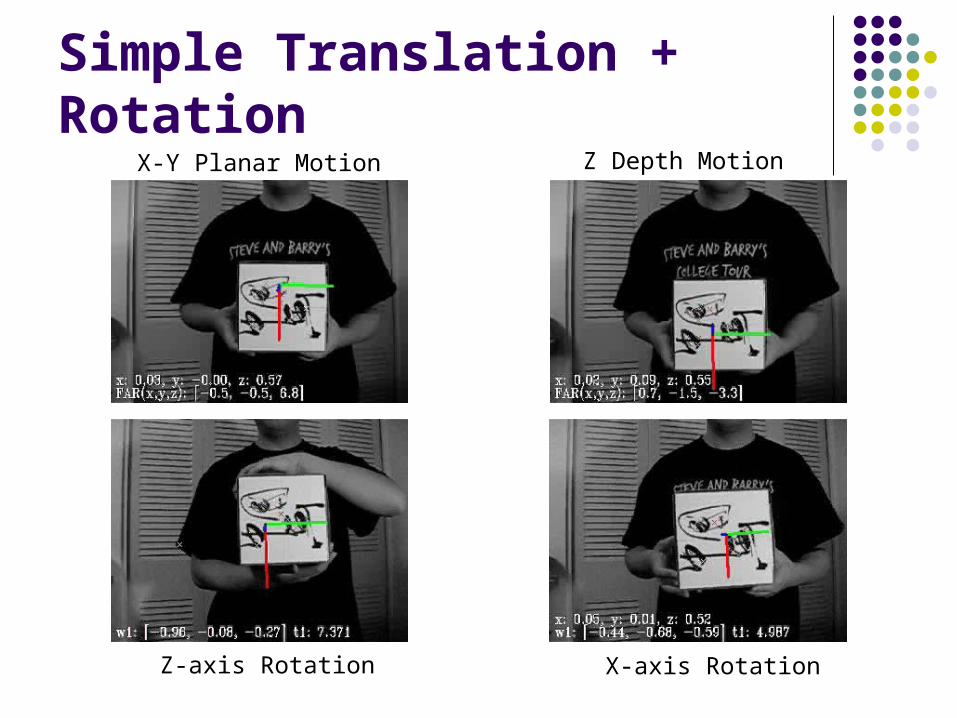
Simple Translation + RotationX-Y Planar Motion Z Depth Motion
Z-axis Rotation X-axis Rotation

More Complex Motion
Y-axis 90+ deg Rotationwith Multiple Markers Free Hovering Motion


















