Toward Safety-Assured Development of Real-Time Software November 5, 2011 Eunkyoung Jee, Oleg...
37
Toward Safety-Assured Development of Real-Time Software November 5, 2011 Eunkyoung Jee, Oleg Sokolsky, Insup Lee PRECISE center, Department of Computer and Information Science University of Pennsylvania The 11 th KOCSEA Technical Symposium
-
Upload
august-booker -
Category
Documents
-
view
214 -
download
0
Transcript of Toward Safety-Assured Development of Real-Time Software November 5, 2011 Eunkyoung Jee, Oleg...
Toward Safety-Assured Development of Real-Time
SoftwareNovember 5, 2011
Eunkyoung Jee, Oleg Sokolsky, Insup LeePRECISE center, Department of Computer and Information
ScienceUniversity of Pennsylvania
The 11th KOCSEATechnical Symposium

2
Outline Introduction Case Study: Pacemaker A Safety-Assured Development Approach for RTS
Formal Modeling and Verification Implementation and Timing Analysis Property Preservation
Limitations and Possibilities Conclusion and Future Work
3
Introduction Guaranteeing timing properties
is crucial for real-time safety critical systems
We can have a formally verified model
How can we implement time-guaranteed real-time software from a verified model?
Present a safety-assured development approach for real-time software Model-driven development +
timing analysis Pacemaker case study
4
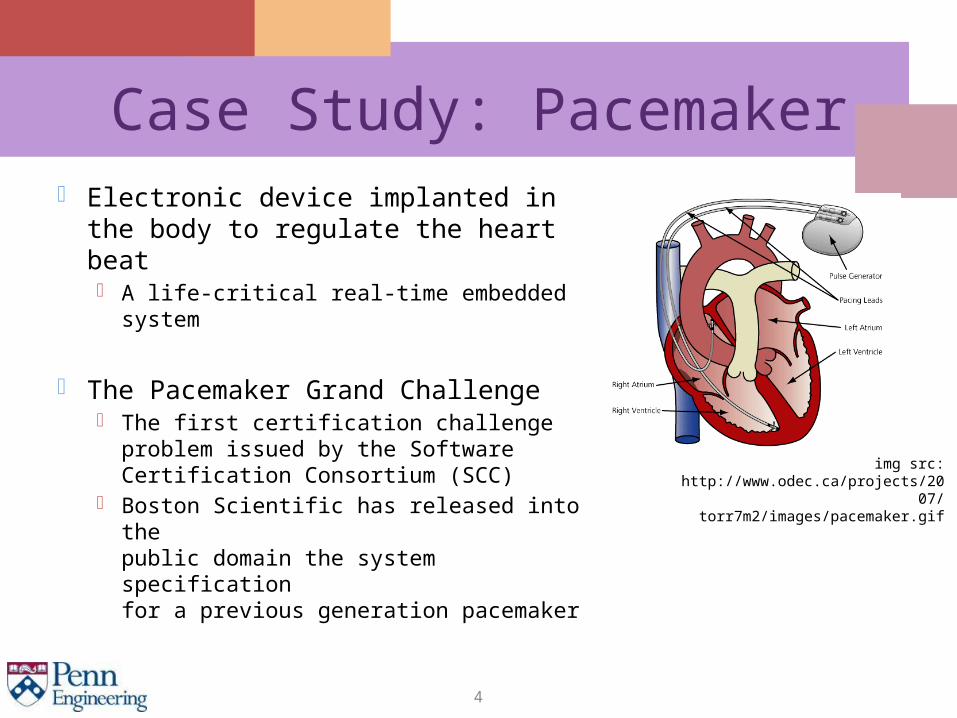
Case Study: Pacemaker Electronic device implanted in the
body to regulate the heart beat A life-critical real-time embedded
system
The Pacemaker Grand Challenge The first certification challenge
problem issued by the Software Certification Consortium (SCC)
Boston Scientific has released into the public domain the system specification
for a previous generation pacemaker
img src: http://www.odec.ca/projects/2007/
torr7m2/images/pacemaker.gif
5
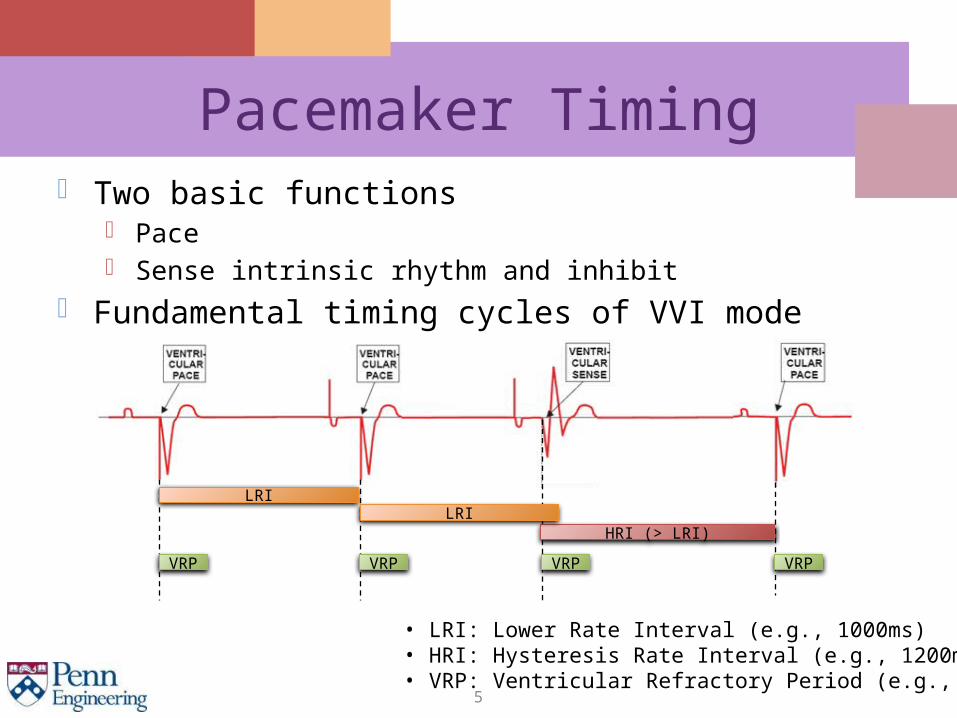
Pacemaker Timing Two basic functions
Pace Sense intrinsic rhythm and inhibit
Fundamental timing cycles of VVI mode (simplest mode)
LRI
HRI (> LRI)LRI
VRP
VRP
VRP
• LRI: Lower Rate Interval (e.g., 1000ms)• HRI: Hysteresis Rate Interval (e.g., 1200ms)• VRP: Ventricular Refractory Period (e.g., 320ms)
VRP
6
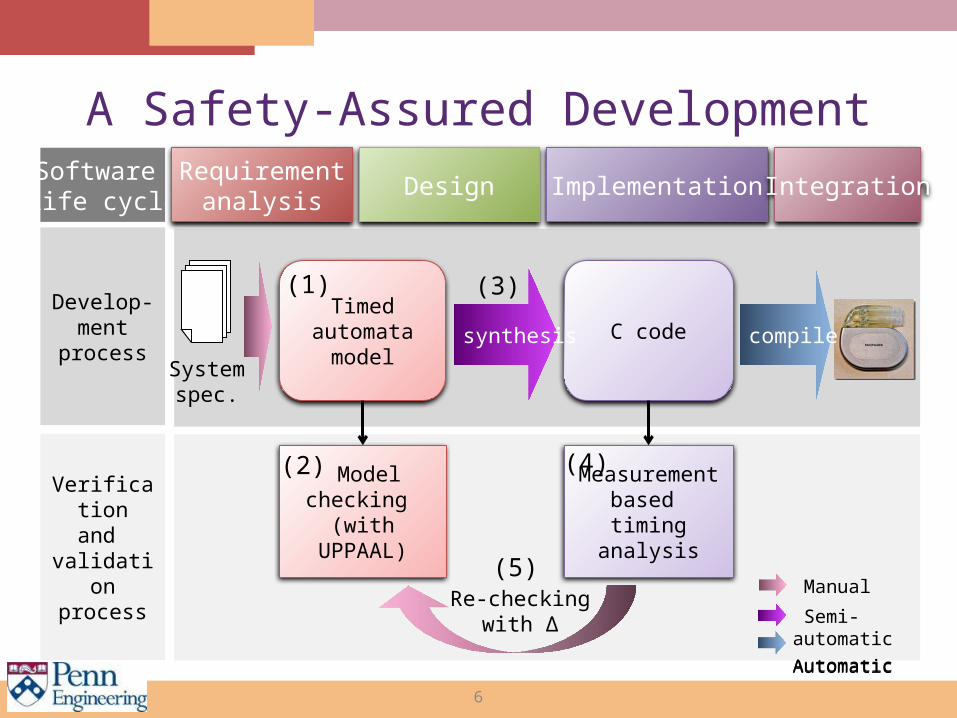
A Safety-Assured Development
Automatic
Systemspec.
C code
Model checking (with UPPAAL)
Measurementbased
timing analysis
Timed automata
model
Software life cycle
Requirementanalysis ImplementationDesign Integration
synthesis
Develop-ment
process
Verificationand
validationprocess
compile
(1)
(2)
(3)
(4)
(5)Re-checking
with ∆
Manual
Semi-automatic Automatic

7
Formal Modeling in UPPAAL
Ventricu-lar
controller
Heart
Pacemaker on VVI mode

8
Formal Verification Model checking using UPPAAL Covered properties
PropLRI: Hysteresis pacing is deactivated a ventricular pace or sense should be no later than LRI
A[] (!Ventricle.hpenable imply Ventricle.x <= Ventricle.LRI) PropHRI: Hysteresis pacing is activated a ventricular
pace or sense should be no later than HRI A[] (Ventricle.hpenable imply Ventricle.x <= Ventricle.HRI)
PropVRP: Sensing cannot occur before VRP ends A[] ((Ventricle.WaitRI && Ventricle.started) imply Ventricle.x
>= Ventricle.VRP) Deadlock freeness
A[] (not deadlock)
All these properties were satisfied on the model We assume that users capture all the important properties correctly.

9
Code Synthesis & Timing Analysis
C code
Model checking
(with UPPAAL)
Measurementbased timing
analysis
Timed automata
model synthesis
(1)
(2)
(3)
(4)
(5)Re-checking
with ∆
Check whether the timing properties are satisfied in the code (by testing)
For each of violating properties, measure how much deviations occur Find a timing tolerance ∆Modify the code and the model with ∆
Check again that the model and the code satisfy all the properties within ∆
Produce C code from the timed automata model systematically

10
Code Synthesis Code generated by the TIMES tool
Amnell et al., Code synthesis for timed automata, Nordic Journal of Computing, 9(4), pp. 269-300, 2003
Generated code ported to a different platform Replacing system calls does not change
functional behavior
11
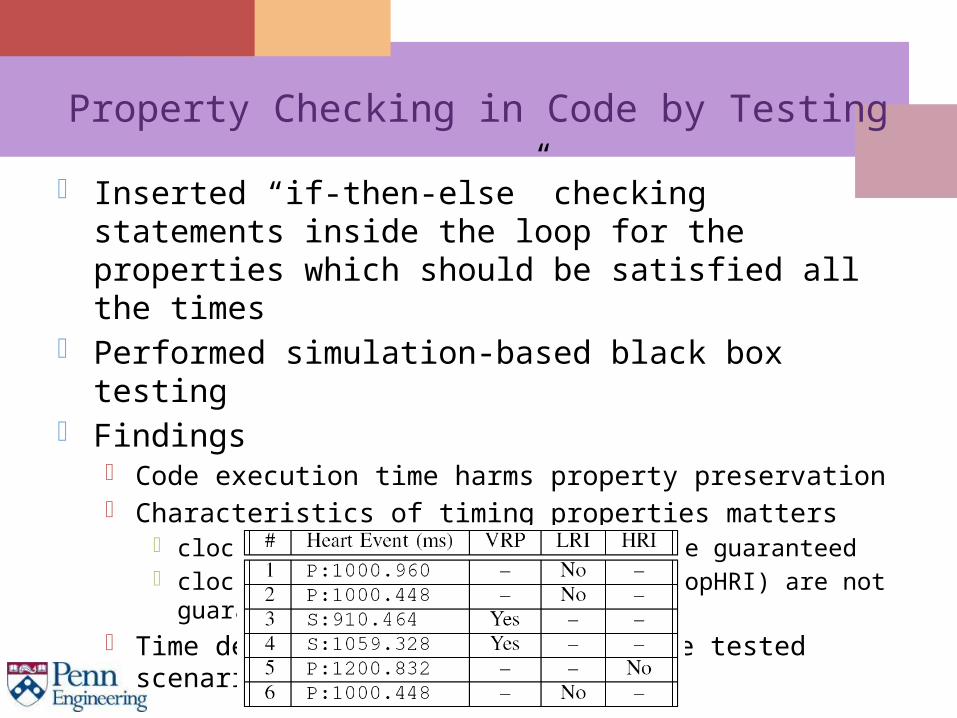
Property Checking in Code by Testing
Inserted “if-then-else” checking statements inside the loop for the properties which should be satisfied all the times
Performed simulation-based black box testing Findings
Code execution time harms property preservation Characteristics of timing properties matters
clock_var limit (e.g. PropVRP) are guaranteed clock_var limit (e.g. PropLRI, PropHRI) are not guaranteed
Time deviations were bounded in the tested scenarios (E.g., 1ms)
12
Timing Tolerance ∆ Modify the code and the model referring to the
violated properties to keep the properties transferred from the model in the code
Strategy for converting the violated properties to the satisfied ones
Make the desired events happen no later than the predetermined time T by evaluating
guard at ∆ time units earlier than T, while not violating all other properties
Find a timing tolerance ∆ by measuring deviations from the desired time
13
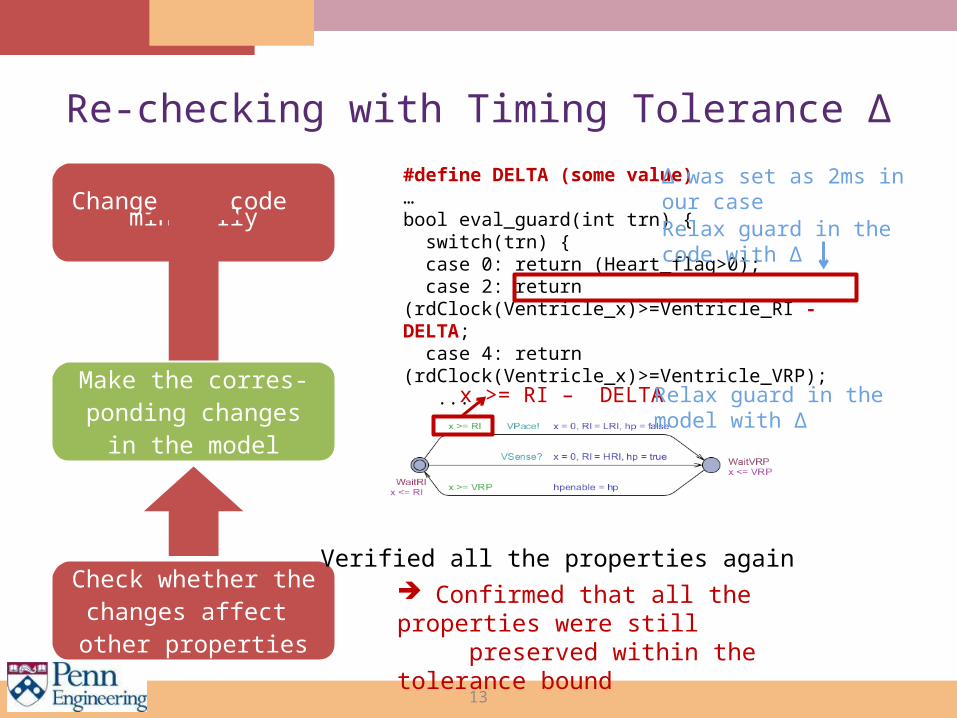
Re-checking with Timing Tolerance ∆
Change the code minimally
Make the corres-ponding changes
in the model
Check whether the changes affect other properties
#define DELTA (some value)…bool eval_guard(int trn) { switch(trn) { case 0: return (Heart_flag>0); case 2: return (rdClock(Ventricle_x)>=Ventricle_RI - DELTA; case 4: return (rdClock(Ventricle_x)>=Ventricle_VRP); ...}
Relax guard in the code with ∆
x >= RI – DELTA Relax guard in the model with ∆
Verified all the properties again Confirmed that all the properties were still preserved within the tolerance bound
∆ was set as 2ms in our case

14
Limitations and Possibilities Type of timing properties
Combinations of complex timing properties need to be considered Instrumentation overhead
Time overhead from instrumentation may cause the code to fail in satisfying timing properties, although not in our example
Existing techniques for improving the performance and accuracy of time profilers based on code instrumentation can be applied to our approach
Timing analysis on C code Simple measurement technique to find timing tolerances can be replaced by
WCET techniques Generalization
Other modeling languages, verification tools, code synthesis techniques, and timing analysis techniques can be used as long as they satisfy minimum requirements
Scalability Semi-automatic code synthesis and manual modifications to the model could
be automated by development of proper tools
15
Conclusion & Future Work Proposed a safety-assured development approach
for real-time software Combined the model-driven development methodology
and the measurement-based timing analysis Suggested a way to achieve property preservation within
the timing tolerance in the code Demonstrated the proposed approach using pacemaker
software
Future Work Complement measurement-based timing analysis with
formal analysis (e.g. WCET) Complement testing by code level verification
16
Questions?

17
References [AFP+03] T. Amnell, E. Fersman, P. Pettersson, W. Yi, and H.
Sun, “Code synthesis for timed automata,” Nordic J. of Computing, vol. 9, no. 4, pp. 269–300, 2002.
[DDR04] M. de Wulf, L. Doyen, and J.-F. Raskin, “Systematic implementation of real-time models,” in FM, ser. Lecture Notes in Computer Science, J. Fitzgerald, I. J. Hayes, and A. Tarlecki, Eds., vol. 3582. Springer, 2005, pp. 139–156.
[AT05] K. Altisen and S. Tripakis, “Implementation of timed automata: an issue of semantics or modeling,” in In Proc. 3rd Int. Conf. Formal Modelling and Analysis of Timed Systems (FORMATS05), Lecture Notes in Computer Science. Springer, 2005, pp. 273–288.

Backup Slides

19
Property Checking in Code Inserted “if-then-else” checking statements into
the end of the loop for each “A[] P” safety property…
for each trn do if (trn is active) and (eval_guard(trn)) if (there is synchronization) if (compl_trn exists) and (eval_guard(compl_trn)) read test_clock;
/* for property checking */ update variables of both trn and compl_trn; take both trn and comp_trn to new states; check properties and print results;
/* for property checking */ set trn to -1; /* check all outgoing transitions again */ end if else /* no synchronization */
update variables of trn; take the transition trn to new state; set trn to -1;
end if end if end ifend for…
Timer value used in checking is a value after guard evaluation followed by check_synch and before taking to next state
20
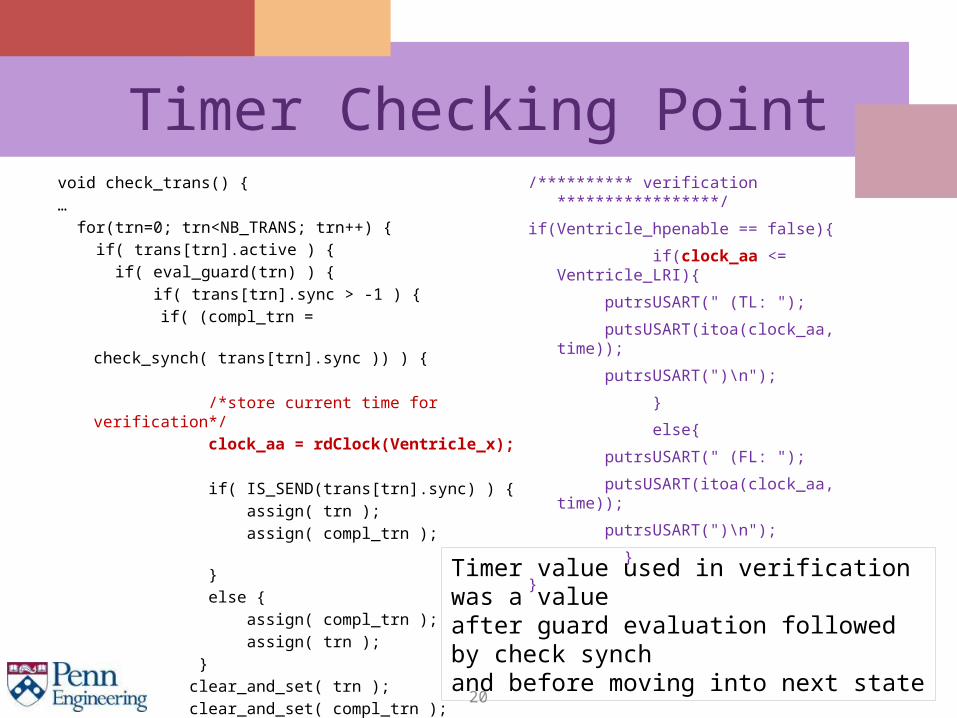
Timer Checking Pointvoid check_trans() {… for(trn=0; trn<NB_TRANS; trn++) { if( trans[trn].active ) { if( eval_guard(trn) ) { if( trans[trn].sync > -1 ) {
if( (compl_trn = check_synch( trans[trn].sync )) ) {
/*store current time for verification*/ clock_aa = rdClock(Ventricle_x);
if( IS_SEND(trans[trn].sync) ) { assign( trn ); assign( compl_trn ); } else { assign( compl_trn ); assign( trn ); }
clear_and_set( trn ); clear_and_set( compl_trn );
/********** verification *****************/
if(Ventricle_hpenable == false){
if(clock_aa <= Ventricle_LRI){
putrsUSART(" (TL: ");
putsUSART(itoa(clock_aa, time));
putrsUSART(")\n");
}
else{
putrsUSART(" (FL: ");
putsUSART(itoa(clock_aa, time));
putrsUSART(")\n");
}
}
Timer value used in verification was a value after guard evaluation followed by check synchand before moving into next state

21
Multi-threaded C code Structure
A thread per each transition
Uses semaphores for each location and each input event
int main(…){ pthread_create(&threadV1,
NULL, transV1, NULL); pthread_create(&threadV2, NULL, transV2, NULL); pthread_create(&threadV3,
NULL, transV3, NULL); … pthread_join ();}
void *transV1(void *ptr) { while(1) {
sem_wait(&WaitRI);t=wait2(&v_x,&ri);clearTimer(&v_x);current=ST_W_VRP;sem_post(&WaitVRP);sem_post(&Pace);
}}
Evaluate guard
Update
transV1

22
Multi-threaded Code Structure
void *transV1(void *ptr) { while(1) {
sem_wait(&WaitRI);t=wait2(&v_x,&ri);clearTimer(&v_x);current=ST_W_VRP;sem_post(&WaitVRP);sem_post(&Pace);
}}
Evaluate guard
Update
transV1 task Template
while true WaitEvent(CURR_LOC_EVENT); ClearEvent(CURR_LOC_EVENT); thread specific calculation sleep when necessary if ((sleeping is used) and (cur_loc is changed when waking up)) cancel transition else update variables clear timer when necessary change to destination location SetEvent(DEST_task_ID, EVENT_ID); perform verification end if end while
23
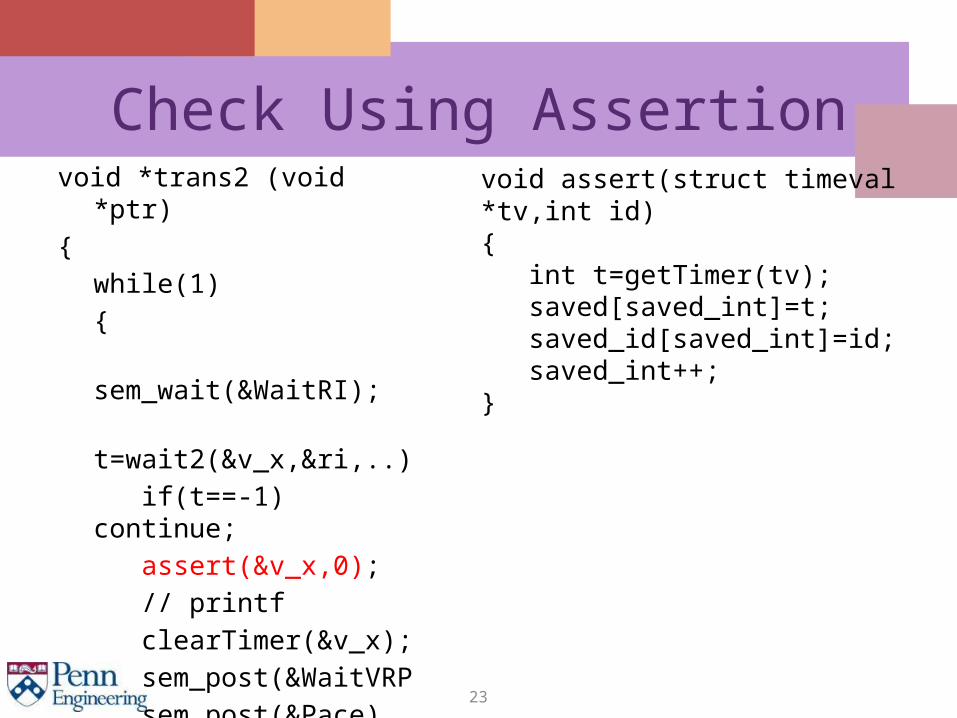
void *trans2 (void *ptr){
while(1){
sem_wait(&WaitRI);
t=wait2(&v_x,&ri,..)if(t==-1)
continue;assert(&v_x,0);// printf
clearTimer(&v_x);
sem_post(&WaitVRPsem_post(&Pace)
}}
Check Using Assertionvoid assert(struct timeval *tv,int id){
int t=getTimer(tv);saved[saved_int]=t;saved_id[saved_int]=id;saved_int++;
}

24
Issues (1) Change the code minimally
Which point of timer should be used for checking? Which delta value should we use? All tested scenarios All possible scenarios
Testing vs. verification
(2) Change the model Can we assure that we made correct changes on model
according to the changes on code? Is it enough to change only corresponding guards in model? Do we also need to modify invariants in model?
25
Issues (cont.) (3) Check properties again
We still feel less confident on that these changes to the code and model really have no effects on property preservation
Even huge delta value (e.g. 500ms) does not make properties violated
Is our set of properties reasonably enough to catch all the important properties of VVI mode?
Do we need to improve our model and properties?
26
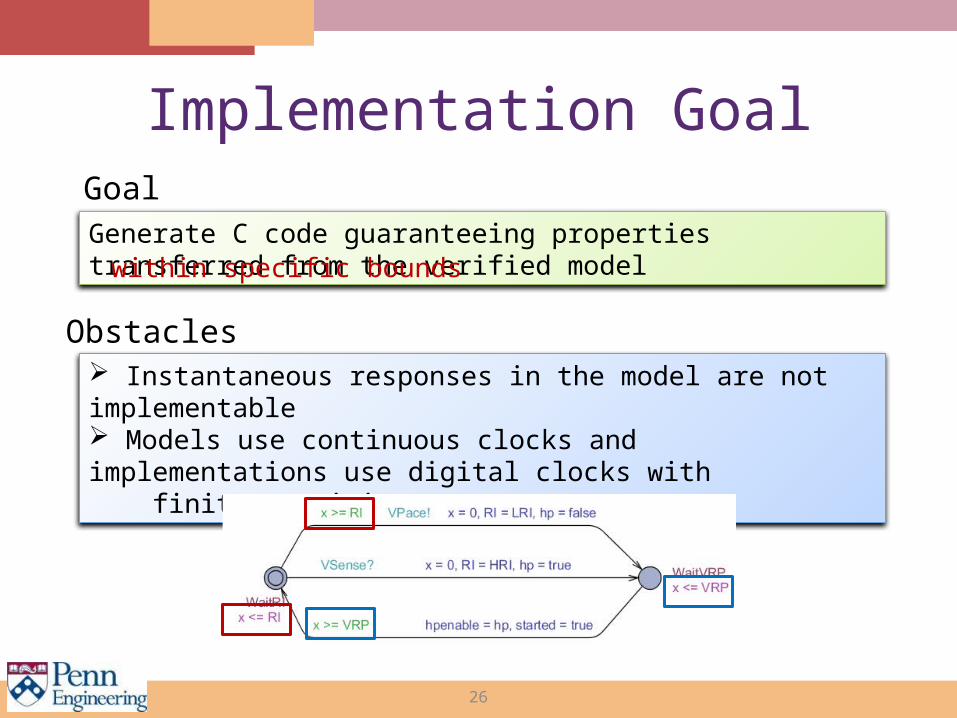
Implementation Goal
Generate C code guaranteeing properties transferred from the verified modelwithin specific bounds
Instantaneous responses in the model are not implementable Models use continuous clocks and implementations use digital clocks with finite precision
Obstacles
Goal

27
Code Synthesis & Timing Analysis
C code
Model checking
(with UPPAAL)
Measurementbased timing
analysis
Timed automata
model synthesis
(1)
(2)
(3)
(4)
(5)Re-checking
with ∆
Check whether the timing properties are satisfied in the code (by testing)
For each of violating properties, measure how much deviations occur Find a timing tolerance ∆Modify the code and the model with ∆
Check again that the model and the code satisfy all the properties within ∆
Produce C code from the timed automata model systematically

28
Code Synthesis Generated two flavors of implementation
code Single-threaded Multi-threaded
Timed automata model of a pacemaker
Multiple threaded C code
Timing analysis
No thread support
Single threaded C code
Timing analysis
Thread support
29
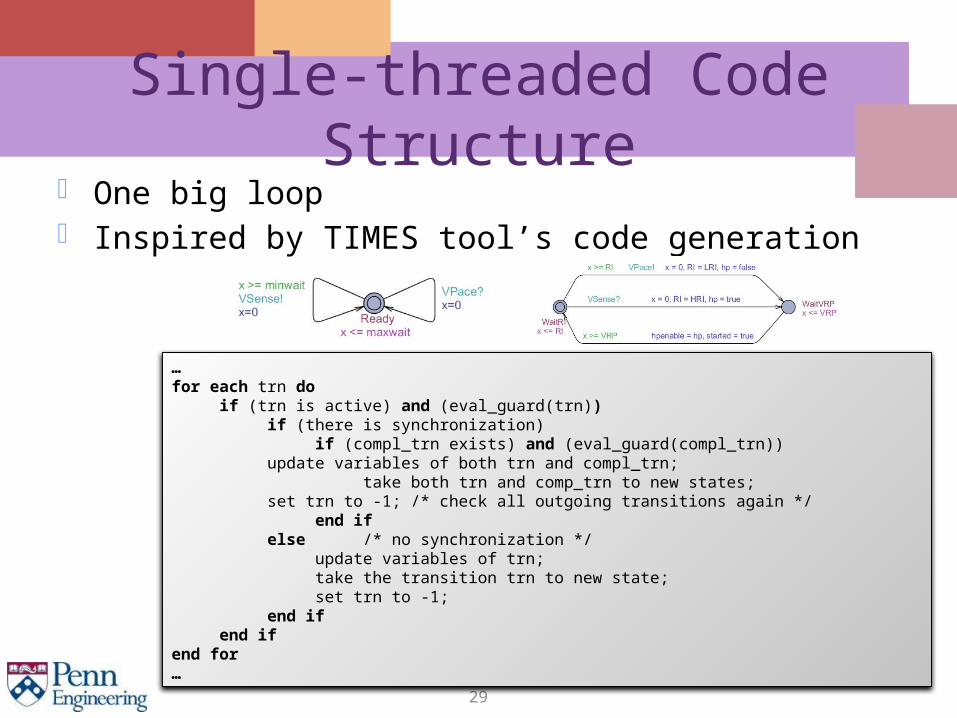
Single-threaded Code Struc-ture
One big loop Inspired by TIMES tool’s code generation
…for each trn do if (trn is active) and (eval_guard(trn)) if (there is synchronization) if (compl_trn exists) and (eval_guard(compl_trn))
update variables of both trn and compl_trn; take both trn and comp_trn to new states;
set trn to -1; /* check all outgoing transitions again */ end if else /* no synchronization */
update variables of trn; take the transition trn to new state; set trn to -1;
end if end ifend for…
30
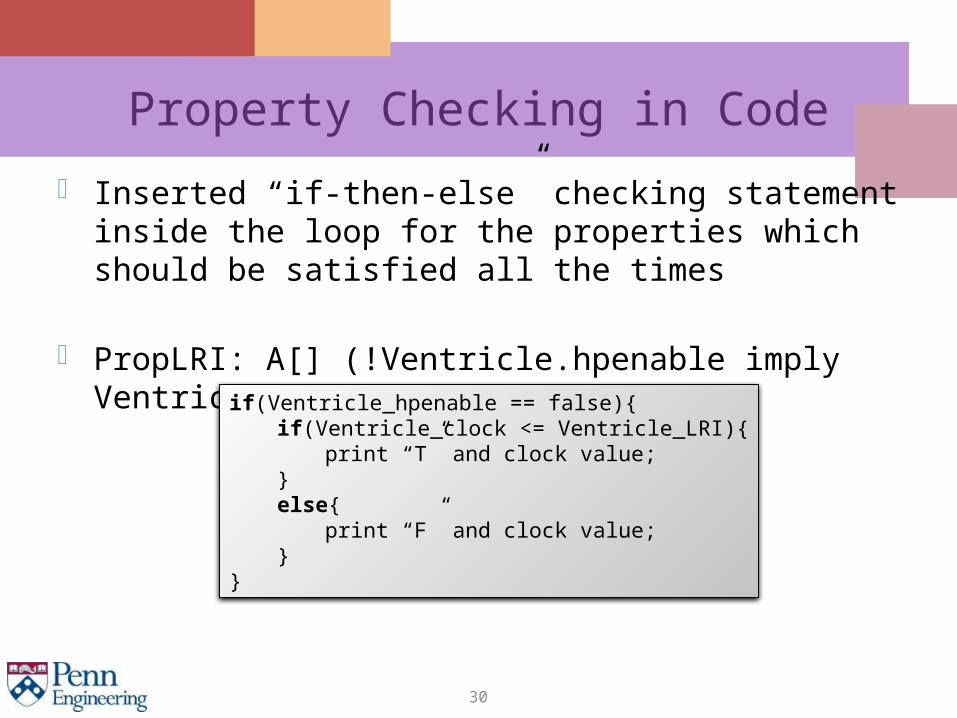
Property Checking in Code Inserted “if-then-else” checking statement inside
the loop for the properties which should be satisfied all the times
PropLRI: A[] (!Ventricle.hpenable imply Ventricle.x <= Ventricle.LRI)if(Ventricle_hpenable == false){
if(Ventricle_clock <= Ventricle_LRI){print “T” and clock value;
}else{
print “F” and clock value;}
}
31
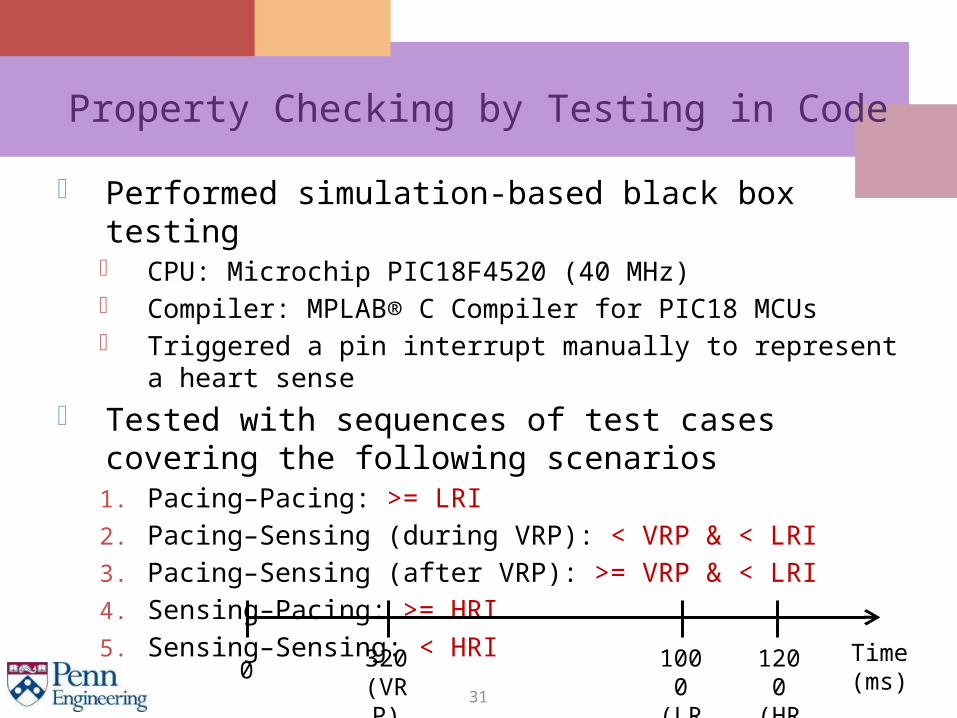
Property Checking by Testing in Code
Performed simulation-based black box testing CPU: Microchip PIC18F4520 (40 MHz) Compiler: MPLAB® C Compiler for PIC18 MCUs Triggered a pin interrupt manually to represent a heart
sense Tested with sequences of test cases covering the
following scenarios1. Pacing–Pacing: >= LRI2. Pacing–Sensing (during VRP): < VRP & < LRI 3. Pacing–Sensing (after VRP): >= VRP & < LRI4. Sensing–Pacing: >= HRI 5. Sensing–Sensing: < HRI
0 320(VRP)
1000
(LRI)
1200
(HRI)
Time (ms)

32
Result of Property Checking in Code
Findings Code execution time harms property preservation Characteristics of timing properties matters
clock_var limit (e.g. PropVRP) are guaranteed clock_var limit (e.g. PropLRI, PropHRI) are not guaranteed
Time deviations were bounded in the tested scenarios (E.g., 1ms)
33
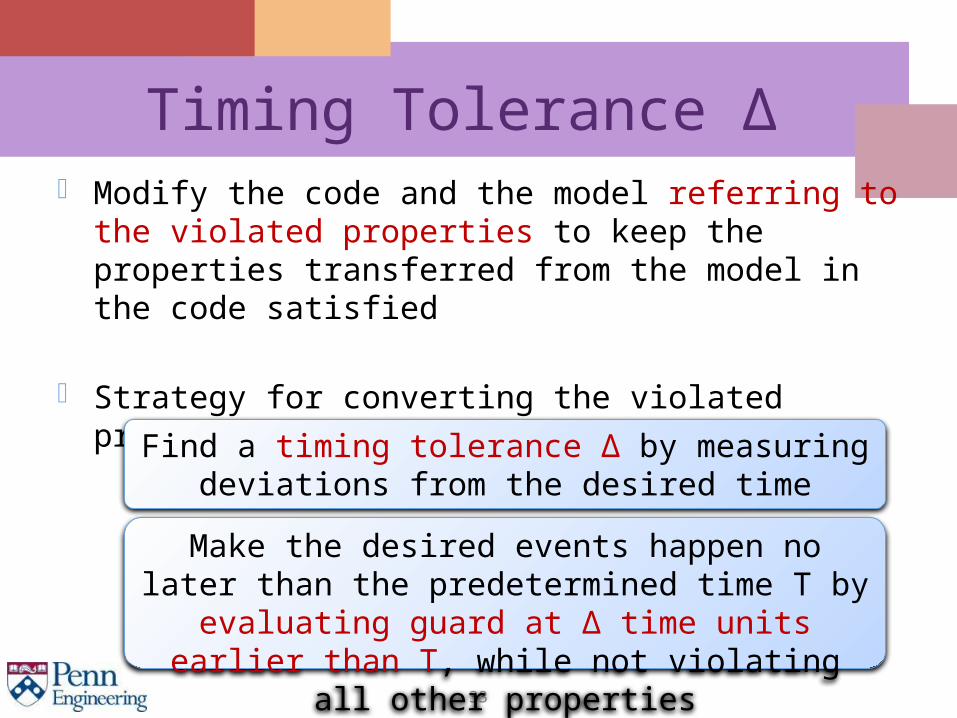
Timing Tolerance ∆ Modify the code and the model referring to the
violated properties to keep the properties transferred from the model in the code satisfied
Strategy for converting the violated properties to the satisfied ones
Make the desired events happen no later than the predetermined time T by evaluating
guard at ∆ time units earlier than T, while not violating all other properties
Find a timing tolerance ∆ by measuring deviations from the desired time

34
Modify the Code with ∆ To make guard evaluated ∆ time units earlier
Experimented using several values of ∆ Three properties are satisfied in the code with ∆
greater than or equal to 2ms for all tested scenarios
#define DELTA (some value)…bool eval_guard(int trn) { switch(trn) { case 0: return (Heart_flag>0); case 2: return (rdClock(Ventricle_x)>=Ventricle_RI - DELTA; case 4: return (rdClock(Ventricle_x)>=Ventricle_VRP); … }}

35
Modify the Model with ∆ Make the corresponding changes in the model
Verify the modified model again w.r.t. all the properties
Confirm that the modified model satisfies all the properties with the timing tolerance
x >= RI – DELTA

36
Result of Property Checking in Code
Simulation-based black box testing on Linux Test inputs: Randomly generated heart sensing
signals Execution delay was shown to be bounded by
2ms
Re-checking resultFirst checking result
: 2ms
37
Related Work: Code Gen. from TA
TIMES tool [AFP+03] Generate code from TA extended with tasks for BrickOS
platform Under synchrony hypothesis (SH), the code synthesis is
guaranteed to preserve safety properties transferred from models
Supports enriched TA, provides many types of automatic analysis
Preservation of properties is not guaranteed without SH ELASTIC2BRICK tool [DDR04]
Generate code from a simplified TA for BrickOS platform Safety properties proven correct with Δ in the model are
preserved Formalized treatment of the synchrony hypothesis and
correctness proofs Limited and difficult applicability (e.g. no shared variables, no
broadcasting, etc.) Our approach
Applicable without much restrictions while guaranteeing timing properties to some extents without SH