DC - 2012-04-13 Sibley - Sibley Opposition to Motion to Dismiss
date post
20-Dec-2015Category
view
223download
5
Time Synchronization (RBS, Elson et al.)
Presenter: Peter Sibley

Traditional Synchronization Methods
Server sends messages to client, containing server’s current time.
Common extension: 1. Client requests time from server
2. Server sends current time.
3. Client estimates one-way latency from the round-trip time.
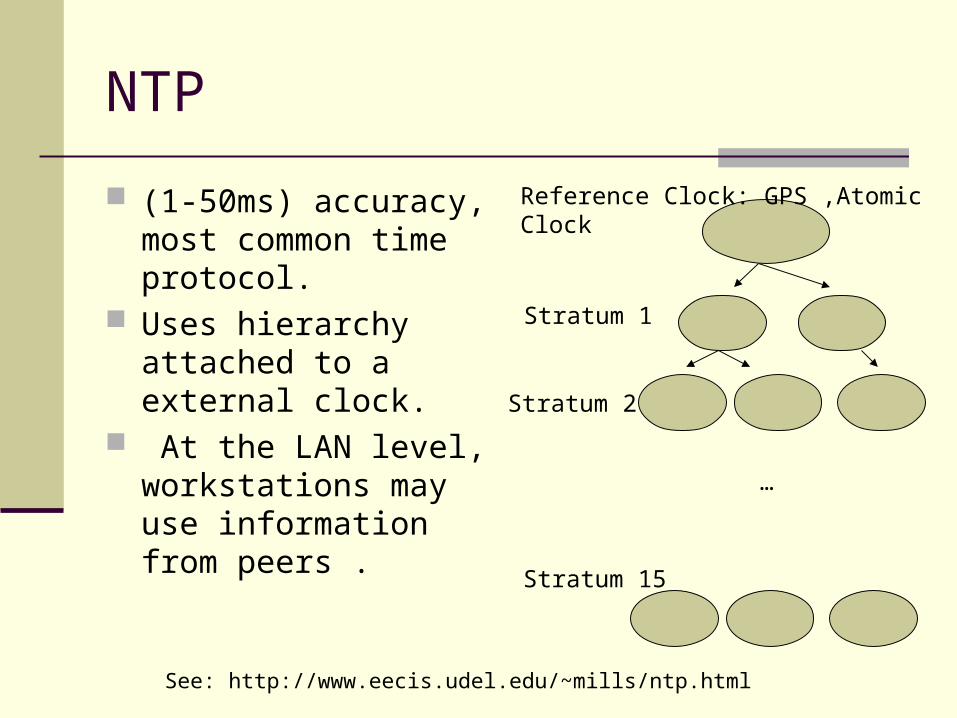
NTP
(1-50ms) accuracy, most common time protocol.
Uses hierarchy attached to a external clock.
At the LAN level, workstations may use information from peers .
Reference Clock: GPS ,Atomic Clock
Stratum 1
Stratum 2
…
Stratum 15
See: http://www.eecis.udel.edu/~mills/ntp.html

Sources of Error
Send Time Constructing message Variable OS delays in moving message to the
interface Access Time
Waiting to transmit message. (depends on MAC)
Propagation Time To time get to receiver’s interface
Receive Time Time for interface to generate a message
reception signal

Observations (Elson et al.)
Try to remove send/access time errors. Synchronize among receivers. Relative time is more important. Latency is less of an issue, determinism is
what matters.

Example Phase Est.
Node i at (0,0) is triggered at t=4. Node j at (0,10) is triggered at t=5.
The moving object has velocity (0,10).
Notice, no reference to a global time scale.

Estimation of Phase
1. A transmitter sends m reference packets
2. Each of the n receivers records the arrival times according to their local clock
3. The receivers exchange their observations
4. Receiver i computes phase offset to another other receiver j as average offsets.

Phase-Estimation Simulation Results

Estimation of Clock Skew
Each device’s crystal oscillator, has slightly different frequency.
Frequency of each oscillator varies over time. Use Least-Squares fit, instead of averaging
phase offsets. Assumes phase error changes at a constant
rate

Implementations
Mote Tested 5 motes, with periodic reference pulse. 2 micro-sec resolution clock
Ipaq running linux 2.4, 802.11 wireless Userspace Unix daemon. Use UDP.

Results (Mote)

Results

Multi-hop extension (example)

Multi-hop algorithm

Performance of multihop extension

Information Driven Dynamic Sensor Collaboration for Tracking Applications, Zhao et al.
Presenter: Peter Sibley

Scenario

Collaborative Tracking.

Sequential Bayesian Estimation
Problem: Picking the next sensor, should be local choice.
Need to Pick the neighbor sensor that will improve the estimation the most.
Rephrase as an optimization problem, Objective is Mixture of Information Gain and
Cost

Utility/Cost.
Different Utility functions can be used: Mahalanobis Distance Entropy Based Estimated Likelihoods
(Depends on distributional assumptions)
Costs Euclidean and weighted Euclidean distance
from the leader node.

Tracking Results

Tracking Results