
Tim lucas-id2ox
27
Estimating abundance from camera traps and acoustic sensors Tim C.D. Lucas & Elizabeth A. Moorcroft CoMPLEX, UCL @timcdlucas @statsforbios
Transcript of Tim lucas-id2ox

Estimating abundance from cameratraps and acoustic sensors
Tim C.D. Lucas & Elizabeth A. Moorcroft
CoMPLEX, UCL
@timcdlucas @statsforbios







Sensor
p
vt = velocity x time

Sensor
p
vt = velocity x time

Sensor
p
Area = pvt

Sensor
p
Area = pvt
z = Dpvt

Sensor
p
vt = velocity x time

Sensor
θ α
r
p = ?

Sensor Angle, θ
Cal
l Ang
le, α
gas
NW1REM
NE1
NE2NE3
NW2
NW3
NW4
NW5
NW6
NW7
SE1
SE2SE3
SE4
SW1
SW2
SW3SW4
SW5
SW6
SW7
SW8
SW9
0 π 2π
0π
2π

αp = 2 r sin2


p̄ =12π
∫ 2π
0p dx

Sensor Angle, θ
Cal
lAng
le,α
0 π 2π
0π
2π
rπ
(θ − cos
(α2
)+ 1
)
rπ
(θ sin
(α2
)− cos
(α2
)+ 1
)
rπ (θ + 2)
2r
2r sin(α2
)
rπ
(θ − cos
(α2
)+ cos
(α2 + θ
))
rπ
(θ + 2 sin
(θ2
))
rπ
(θ sin
(α2
)− cos
(α2
)+ cos
(α2 + θ
))
Expressions for p̄

Sensor Angle, θ
Cal
lAng
le,α
0 π 2π
0π
2π
rπ
(θ − cos
(α2
)+ 1
)
rπ
(θ sin
(α2
)− cos
(α2
)+ 1
)
rπ (θ + 2)
2r
2r sin(α2
)
rπ
(θ − cos
(α2
)+ cos
(α2 + θ
))
rπ
(θ + 2 sin
(θ2
))
rπ
(θ sin
(α2
)− cos
(α2
)+ cos
(α2 + θ
))
D = z/(p̄vt)

Simulations

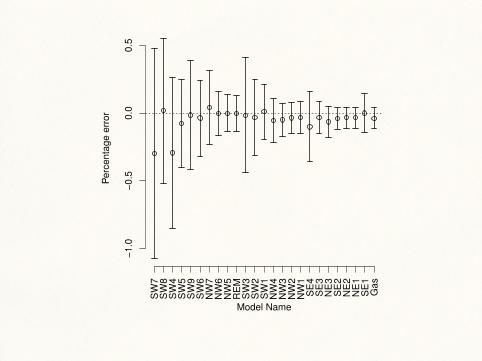
−1.0
−0.5
0.0
0.5
Model Name
Perc
enta
ge e
rror
SW
7S
W8
SW
4S
W5
SW
9S
W6
NW
7N
W6
NW
5R
EM
SW
3S
W2
SW
1N
W4
NW
3N
W2
NW
1S
E4
SE
3N
E3
SE
2N
E2
NE
1S
E1
Gas

Sensor Angle, θ
Cal
lAng
le,α
π 2π
0π
2π
0.5
1.0
1.5
2.0
2.5
3.0
3.5
SD
of E
rror
s

20 40 60 80 100
−70
070
NW1
20 40 60 80 100
−70
070
SW1
20 40 60 80 100
−70
070
SE3
20 40 60 80 100
−70
070
NE1
Number of captures
Per
cent
age
erro
r

−0.2
0.0
0.2
0.4
0.6
0.8
Correlated Walk
Perc
enta
ge e
rror
0 π 3 2π 3 π
NWSWNESE

0 0.25 0.5 0.75−4
04
NW1
0 0.25 0.5 0.75−4
04
SW1
0 0.25 0.5 0.75−4
04
SE3
0 0.25 0.5 0.75−4
04
NE1
Proportion of time spent stationary
Per
cent
age
Err
or

Any Questions ?Tim C.D. Lucas & Elizabeth A. Moorcroft
@timcdlucas @statsforbios
Sensor Angle, θ
Cal
lAng
le,α
0 π 2π
0π
2π
rπ
(θ − cos
(α2
)+ 1
)
rπ
(θ sin
(α2
)− cos
(α2
)+ 1
)
rπ (θ + 2)
2r
2r sin(α2
)
rπ
(θ − cos
(α2
)+ cos
(α2 + θ
))
rπ
(θ + 2 sin
(θ2
))
rπ
(θ sin
(α2
)− cos
(α2
)+ cos
(α2 + θ
))


















