This article was originally published in the Comprehensive...
18
This article was originally published in the Comprehensive Nuclear Materials published by Elsevier, and the attached copy is provided by Elsevier for the author's benefit and for the benefit of the author's institution, for non-commercial research and educational use including without limitation use in instruction at your institution, sending it to specific colleagues who you know, and providing a copy to your institution’s administrator. All other uses, reproduction and distribution, including without limitation commercial reprints, selling or licensing copies or access, or posting on open internet sites, your personal or institution’s website or repository, are prohibited. For exceptions, permission may be sought for such use through Elsevier's permissions site at: http://www.elsevier.com/locate/permissionusematerial Cai W., Li J., and Yip S. (2012) Molecular Dynamics. In: Konings R.J.M., (ed.) Comprehensive Nuclear Materials, volume 1, pp. 249-265 Amsterdam: Elsevier. © 2012 Elsevier Ltd. All rights reserved.
Transcript of This article was originally published in the Comprehensive...

This article was originally published in the Comprehensive Nuclear Materials published by Elsevier, and the attached copy is provided by Elsevier for the author's benefit and
for the benefit of the author's institution, for non-commercial research and educational use including without limitation use in instruction at your institution, sending it to
specific colleagues who you know, and providing a copy to your institution’s administrator.
All other uses, reproduction and distribution, including without limitation commercial reprints, selling or licensing copies or access, or posting on open internet sites, your personal or institution’s website or repository, are prohibited. For exceptions, permission may be sought for such use through Elsevier's permissions site at:
http://www.elsevier.com/locate/permissionusematerial
Cai W., Li J., and Yip S. (2012) Molecular Dynamics. In: Konings R.J.M., (ed.) Comprehensive Nuclear Materials, volume 1, pp. 249-265 Amsterdam: Elsevier.
© 2012 Elsevier Ltd. All rights reserved.

Author's personal copy
1.09 Molecular DynamicsW. CaiStanford University, Stanford, CA, USA
J. LiUniversity of Pennsylvania, Philadelphia, PA, USA
S. YipMassachusetts Institute of Technology, Cambridge, MA, USA
� 2012 Elsevier Ltd. All rights reserved.
1.09.1 Introduction 249
1.09.2 Defining Classical MD Simulation Method 250
1.09.3 The Interatomic Potential 252
1.09.3.1 An Empirical Pair Potential Model 252
1.09.4 Book-keeping Matters 253
1.09.5 MD Properties 255
1.09.5.1 Property Calculations 255
1.09.5.2 Properties That Make MD Unique 255
1.09.6 MD Case Studies 256
1.09.6.1 Perfect Crystal 256
1.09.6.1.1 Zero-temperature properties 257
1.09.6.1.2 Finite-temperature properties 258
1.09.6.2 Dislocation 259
1.09.6.2.1 Peierls stress at zero temperature 259
1.09.6.2.2 Mobility at finite temperature 261
1.09.7 Perspective 262
References 264
Abbreviations
bcc
Body-centered cubic structure
CSD
Central symmetry deviationEAM
Embedded Atom Method potentialFS
Finnis–Sinclair potentialMD
Molecular dynamics simulationNMR
Nuclear Magnetic Resonance experimentnn
Nearest-neighbor distanceNPT
Ensemble in which number of atoms,pressure and temperature are constant
NVE
Ensemble in which number of atoms,volume and total energy are constant
NVT
Ensemble in which number of atoms,volume and temperature are constant
PBC
Periodic boundary condition1.09.1 Introduction
A concept that is fundamental to the foundations ofComprehensive Nuclear Materials is that of microstruc-tural evolution in extreme environments. Given
Comprehensive Nuclear Mater
the current interest in nuclear energy, an emphasison how defects in materials evolve under conditionsof high temperature, stress, chemical reactivity, andradiation field presents tremendous scientific andtechnological challenges, as well as opportunities,across the many relevant disciplines in this importantundertaking of our society. In the emerging field ofcomputational science, which may simply be definedas the use of advanced computational capabilitiesto solve complex problems, the collective contentsof Comprehensive Nuclear Materials constitute a set ofcompelling and specific materials problems that canbenefit from science-based solutions, a situation thatis becoming increasingly recognized.1–4 In discus-sions among communities that share fundamentalscientific capabilities and bottlenecks, multiscalemodeling and simulation is receiving attention forits ability to elucidate the underlying mechanismsgoverning the materials phenomena that are criticalto nuclear fission and fusion applications. As illu-strated in Figure 1, molecular dynamics (MD) is anatomistic simulation method that can provide detailsof atomistic processes in microstructural evolution.
249ials (2012), vol. 1, pp. 249-265

250 Molecular Dynamics
Author's personal copy
As the method is applicable to a certain range oflength and time scales, it needs to be integratedwith other computational methods to span the lengthand time scales of interest to nuclear materials.9
The aim of this chapter is to discuss in elemen-tary terms the key attributes of MD as a principalmethod of studying the evolution of an assembly ofatoms under well-controlled conditions. The intro-ductory section is intended to be helpful to studentsand nonspecialists. We begin with a definition ofMD, followed by a description of the ingredients thatgo into the simulation, the properties that one cancalculate with this approach, and the reasons why themethod is unique in computational materials research.We next examine results of case studies obtained usingan open-source code to illustrate how one can studythe structure and elastic properties of a perfect crystalin equilibrium and the mobility of an edge dislocation.We then return to Figure 1 to provide a perspectiveon the potential as well as the limitations of MD inmultiscale materials modeling and simulation.
1.09.2 Defining Classical MDSimulation Method
In the simplest physical terms, MD may be charac-terized as a method of ‘particle tracking.’ Operation-ally, it is a method for generating the trajectories of asystem of N particles by direct numerical integration
Figure 1 MD in the multiscale modeling framework ofdislocation microstructure evolution. The experimental
micrograph shows dislocation cell structures in
Molybdenum.5 The other images are snapshots from
computer models of dislocations.6–8
Comprehensive Nuclear Mater
of Newton’s equations of motion, with appropriatespecification of an interatomic potential and suitableinitial and boundary conditions. MD is an atomisticmodeling and simulation method when the particlesin question are the atoms that constitute the materialof interest. The underlying assumption is that onecan treat the ions and electrons as a single, classicalentity. When this is no longer a reasonable approxi-mation, one needs to consider both ion and electronmotions. One can then distinguish two versions ofMD, classical and ab initio, the former for treatingatoms as classical entities (position and momentum)and the latter for treating separately the electronicand ionic degrees of freedom, where a wave func-tion description is used for the electrons. In thischapter, we are concerned only with classical MD.The use of ab initio methods in nuclear materialsresearch is addressed elsewhere (Chapter 1.08, AbInitio Electronic Structure Calculations forNuclear Materials). Figure 2 illustrates the MD sim-ulation system as a collection of N particles containedin a volume O. At any instant of time t, the particlecoordinates are labeled as a 3N-dimensional vector,r3N ðtÞ � fr1ðtÞ; r2ðtÞ; . . . ; rN ðtÞg, where ri repre-sents the three coordinates of atom i. The simula-tion proceeds with the system in a prescribed initialconfiguration, r3N ðt0Þ, and velocity, _r3N ðt0Þ, at timet ¼ t0. As the simulation proceeds, the particles evolvethrough a sequence of time steps, r3N ðt0Þ ! r3N ðt1Þ !r3N ðt2Þ ! � � � ! r3N ðtLÞ, where tk ¼ t0 þ kDt ,k¼ 1,2, . . .,L, andDt is the time step ofMD simulation.The simulation runs for L number of steps and coversa time interval of LDt . Typical values of L can rangefrom 104 to 108 and Dt � 10�15s. Thus, nominal MDsimulations follow the system evolution over time inter-vals not more than �1–10 ns.
Vj (t)
rj (t)
x
y
N
z
Figure 2 MD simulation cell is a system of N particleswith specified initial and boundary conditions. The output of
the simulation consists of the set of atomic coordinates
r3NðtÞ and corresponding velocities (time derivatives).All properties of the MD simulation are then derived from
the trajectories, {r3N (t),_r3N(t)}.
ials (2012), vol. 1, pp. 249-265

Molecular Dynamics 251
Author's personal copy
The simulation system has a certain energy E, thesum of the kinetic and potential energies of theparticles, E¼ KþU, where K is the sum of individualkinetic energies
K ¼ 1
2mXNj¼1
vj � vj ½1�
and U ¼ Uðr3N Þ is a prescribed interatomic interac-tion potential. Here, for simplicity, we assume thatall particles have the same mass m. In principle,the potential U is a function of all the particle coordi-nates in the system if we allow each particle to interactwith all the others without restriction. Thus, thedependence of U on the particle coordinates can beas complicated as the system under study demands.However, for the present discussion we introducean approximation, the assumption of a two-body orpair-wise additive interaction, which is sufficient toillustrate the essence of MD simulation.
To find the atomic trajectories in the classicalversion of MD, one solves the equations governingthe particle coordinates, Newton’s equations of motionin mechanics. For our N-particle system with potentialenergy U, the equations are
md2rj
dt 2¼ �rrj U ðr3N Þ; j ¼ 1; . . . ;N ½2�
where m is the particle mass. Equation [2] may lookdeceptively simple; actually, it is as complicated as thefamous N-body problem that one generally cannotsolve exactly when N is >2. As a system of coupledsecond-order, nonlinear ordinary differential equations,eqn [2] can be solved numerically, which is what iscarried out in MD simulation.
Equation [2] describes how the system (particlecoordinates) evolves over a time period from a giveninitial state. Suppose we divide the time period of inter-est into many small segments, each being a time step ofsizeDt . Given the system conditions at some initial timet0, r
3N ðt0Þ, and _r3N ðt0Þ, integration means we advancethe system successively by increments of Dt ,
r3N ðt0Þ ! r3N ðt1Þ ! r3N ðt2Þ ! � � � ! r3N ðtLÞ ½3�where L is the number of time steps making up theinterval of integration.
How do we numerically integrate eqn [3] for agiven U ? A simple way is to write a Taylor seriesexpansion,
rj ðt0 þ DtÞ ¼ rj ðt0Þ þ vj ðt0ÞDtþ 1=2aj ðt0ÞðDtÞ2 þ � � �
½4�
Comprehensive Nuclear Mater
and a similar expansion for rj ðt0 � DtÞ. Adding thetwo expansions gives
rj ðt0 þ DtÞ ¼ � rj ðt0 � DtÞ þ 2rj ðt0Þþ aj ðt0ÞðDtÞ2 þ � � �
½5�
Notice that the left-hand side of eqn [5] is what wewant, namely, the position of particle j at the nexttime step t0þDt. We already know the positions at t0and the time step before, so to use eqn [5] we needthe acceleration of particle j at time t0. For this wesubstitute Fj ðr3N ðt0ÞÞ=m in place of accelerationaj ðt0Þ, where Fj is just the right-hand side ofeqn [2]. Thus, the integration of Newton’s equationsof motion is accomplished in successive time incre-ments by applying eqn [5]. In this sense, MD can beregarded as a method of particle tracking where onefollows the system evolution in discrete time steps.Although there are more elaborate, and thereforemore accurate, integration procedures, it is impor-tant to note that MD results are as rigorous as classicalmechanics based on the prescribed interatomic poten-tial. The particular procedure just described is calledthe Verlet (leapfrog)10 method. It is a symplecticintegrator that respects the symplectic symmetry ofthe Hamiltonian dynamics; that is, in the absence offloating-point round-off errors, the discrete mappingrigorously preserves the phase space volume.11,12
Symplectic integrators have the advantage of long-term stability and usually allow the use of larger timesteps than nonsymplectic integrators. However, thisadvantage may disappear when the dynamics is notstrictly Hamiltonian, such as when some thermostat-ing procedure is applied. A popular time integratorused in many early MD codes is the Gear predictor–corrector method13 (nonsymplectic) of order 5. Higheraccuracy of integration allows one to take a largervalue of Dt so as to cover a longer time interval forthe same number of time steps. On the other hand,the trade-off is that one needs more computer mem-ory relative to the simpler method.
A typical flowchart for an MD code11 would looksomething like Figure 3. Among these steps, the partthat is the most computationally demanding is theforce calculation. The efficiency of an MD simulationtherefore depends on performing the force calculationas simply as possible without compromising the phys-ical description (simulation fidelity). Since the force iscalculated by taking the gradient of the potential U,the specification of U essentially determines the com-promise between physical fidelity and computationalefficiency.
ials (2012), vol. 1, pp. 249-265

Set particlepositions
Assign particlevelocities
Calculate force oneach particle
Update particlepositions and velocities
to next time step
Reach presettime steps?
No
Yes
Save/analyze dataand print results
Save particle positionsand velocities and other
properties to file
Figure 3 Flow chart of MD simulation.
252 Molecular Dynamics
Author's personal copy
1.09.3 The Interatomic Potential
This is a large and open-ended topic with an exten-sive literature.14 It is clear from eqn [2] that theinteraction potential is the most critical quantity inMD modeling and simulation; it essentially controlsthe numerical and algorithmic simplicity (or complex-ity) of MD simulation and, therefore, the physicalfidelity of the simulation results. Since Chapter 1.10,Interatomic Potential Development is devoted tointeratomic potential development, we limit our dis-cussion only to simple classical approximations toUðr1; r2; . . . ; rN Þ.
Practically, all atomistic simulations are based onthe Born–Oppenheimer adiabatic approximation,which separates the electronic and nuclear motions.15
Since electrons move much more quickly becauseof their smaller mass, during their motion one cantreat the nuclei as fixed in instantaneous positions,or equivalently the electron wave functions follow thenuclear motion adiabatically. As a result, the electronsare treated as always in their ground state as thenuclei move.
Comprehensive Nuclear Mater
For the nuclear motions, we consider an expansionof U in terms of one-body, two-body, . . . N-bodyinteractions:
Uðr3N Þ ¼XNj¼1
V1ðrj Þ þXNi<j
V2ðri ; rj Þ
þXNi<j<k
V3ðri ; rj ; rkÞ þ � � �½6�
The first term, the sum of one-body interactions, isusually absent unless an external field is presentto couple with each atom individually. The secondsum is the contribution of pure two-body interactions(pairwise additive). For some problems, this termalone is sufficient to be an approximation to U. Thethird sum represents pure three-body interactions,and so on.
1.09.3.1 An Empirical Pair Potential Model
A widely adopted model used in many early MDsimulations in statistical mechanics is the Lennard-Jones (6-12) potential, which is considered a reason-able description of van der Waals interactions betweenclosed-shell atoms (noble gas elements, Ne, Ar, Kr,and Xe). This model has two parameters that arefixed by fitting to selected experimental data. Oneshould recognize that there is no one single physi-cal property that can determine the entire potentialfunction. Thus, using different data to fix the modelparameters of the same potential form can lead todifferent simulations, making quantitative compar-isons ambiguous. To validate a model, it is best tocalculate an observable property not used in thefitting and compare with experiment. This wouldprovide a test of the transferability of the potential,a measure of robustness of the model. In fittingmodel parameters, one should use different kindsof properties, for example, an equilibrium or ther-modynamic property and a vibrational propertyto capture the low- and high-frequency responses(the hope is that this would allow a reasonable inter-polation over all frequencies). Since there is consid-erable ambiguity in what is the correct methodof fitting potential models, one often has to rely onagreement with experiment as a measure of thegoodness of potential. However, this could be mis-leading unless the relevant physics is built intothe model.
For a qualitative understanding of MD essentials,it is sufficient to assume that the interatomic
ials (2012), vol. 1, pp. 249-265

Molecular Dynamics 253
Author's personal copy
potential U can be represented as the sum of two-body interactions
Uðr1; . . . ; rN Þ ffiXi<j
V ðrij Þ ½7�
where rij � jri � rj j is the separation distancebetween particles i and j. V is the pairwise additiveinteraction, a central force potential that is a func-tion of only the scalar separation distance betweenthe two particles, rij . A two-body interaction energycommonly used in atomistic simulations is theLennard-Jones potential
V ðrÞ ¼ 4e½ðs=rÞ12 � ðs=rÞ6� ½8�where e and s are the potential parameters that set thescales for energy and separation distance, respectively.Figure 4 shows the interaction energy rising sharplywhen the particles are close to each other, showing aminimum at intermediate separation and decaying tozero at large distances. The interatomic force
FðrÞ � �dV ðrÞdr
½9�
is also sketched in Figure 4. The particles repel eachother when they are too close, whereas at large separa-tions they attract. The repulsion can be understood asarising from overlap of the electron clouds, whereasthe attraction is due to the interaction between theinduced dipole in each atom. The value of 12 forthe first exponent in V(r) has no special significance,as the repulsive term could just as well be replaced byan exponential. The value of 6 for the second expo-nent comes from quantum mechanical calculations(the so-called London dispersion force) and therefore
V(r)
F(r)
rcr
ronn
o
2nn
s
e
Figure 4 The Lennard–Jones interatomic potential V(r).The potential vanishes at r ¼ s and has a depth equal to�e.Also shown is the corresponding force F(r) between the two
particles (dashed curve), which vanishes at r0 ¼ 21=6s.At separations less or greater than r0, the force is repulsive
or attractive, respectively. Arrows at nn and 2nn indicate
typical separation distances of nearest and second nearest
neighbors in a solid.
Comprehensive Nuclear Mater
is not arbitrary. Regardless of whether one uses eqn[8] or some other interaction potential, a short-rangerepulsion is necessary to give the system a certainsize or volume (density), without which the particleswill collapse onto each other. A long-range attractionis also necessary for cohesion of the system, withoutwhich the particles will not stay together as they mustin all condensed states of matter. Both are necessaryfor describing the physical properties of the solidsand liquids that we know from everyday experience.
Pair potentials are simple models that capture therepulsive and attractive interactions between atoms.Unfortunately, relatively few materials, among themthe noble gases (He, Ne, Ar, etc.) and ionic crystals(e.g., NaCl), can be well described by pair potentialswith reasonable accuracy. For most solid engineeringmaterials, pair potentials do a poor job. For example,all pair potentials predict that the two elastic con-stants for cubic crystals, C12 and C44, must be equal toeach other, which is certainly not true for most cubiccrystals. Therefore, most potential models for engi-neering materials include many-body terms for animproved description of the interatomic interaction.For example, the Stillinger–Weber potential16 forsilicon includes a three-body term to stabilize thetetrahedral bond angle in the diamond-cubic struc-ture. A widely used typical potential for metals isthe embedded-atom method17 (EAM), in which themany-body effect is introduced in a so-called embed-ding function.
1.09.4 Book-keeping Matters
Our simulation system is typically a parallelepipedsupercell in which particles are placed either in a veryregular manner, as in modeling a crystal lattice, or insome random manner, as in modeling a gas or liquid.For the simulation of perfect crystals, the number ofparticles in the simulation cell can be quite small, andonly certain discrete values, such as 256, 500, and 864,should be specified. These numbers pertain to a face-centered-cubic crystal that has four atoms in each unitcell. If our simulation cell has l unit cells along eachside, then the number of particles in the cube willbe 4l3. The above numbers then correspond to cubeswith 4, 5, and 6 cells along each side, respectively.
Once we have chosen the number of particles wewant to simulate, the next step is to choose the systemdensity we want to study. Choosing the density isequivalent to choosing the system volume sincedensity r ¼ N=O, where N is the number of particles
ials (2012), vol. 1, pp. 249-265

254 Molecular Dynamics
Author's personal copy
and O is the supercell volume. An advantage ofthe Lennard-Jones potential is that one can work indimensionless reduced units. The reduced density rs3
has typical values of about 0.9–1.2 for solids and0.6–0.85 for liquids. For reduced temperature kBT=e,the values are 0.4–0.8 for solids and 0.8–1.3 for liquids.Notice that assigning particle velocities accordingto the Maxwellian velocity distribution probability ¼ðm=2pkBTÞ3=2exp½�mðv2xþv2y þv2zÞ=2kBT �dvx dvy dvzis tantamount to setting the system temperature T.
For simulation of bulk properties (system with nofree surfaces), it is conventional to use the periodic
boundary condition (PBC). This means that the cubicalsimulation cell is surrounded by 26 identical imagecells. For every particle in the simulation cell, there isa corresponding image particle in each image cell.The 26 image particles move in exactly the samemanner as the actual particle, so if the actual particleshould happen to move out of the simulation cell,the image particle in the image cell opposite to theexit side will move in and become the actual particlein the simulation cell. The net effect is that par-ticles cannot be lost or created. It follows thenthat the particle number is conserved, and if thesimulation cell volume is not allowed to change,the system density remains constant.
Since in the pair potential approximation, theparticles interact two at a time, a procedure is neededto decide which pair to consider among the pairsbetween actual particles and between actual andimage particles. The minimum image convention is aprocedure in which one takes the nearest neighborto an actual particle as the interaction partner,regardless of whether this neighbor is an actual parti-cle or an image particle. Another approximation thatis useful in keeping the computations to a manage-able level is the introduction of a force cutoff distancebeyond which particle pairs simply do not see eachother (indicated as rc in Figure 4). In order to avoid aparticle interacting with its own image, it is necessaryto set the cutoff distance to be less than half of thesimulation cell dimension.
Another book-keeping device often used in MDsimulation is a neighbor list to keep track of who are thenearest, second nearest, . . . neighbors of each particle.This is to save time from checking every particle in thesystem every time a force calculation is made. The listcan be used for several time steps before updating. Inlow-temperature solidswhere the particles do notmovevery much, it is possible to do an entire simulationwithout, or with only a few, updating, whereas in simu-lation of liquids, updation every 5or 10 steps is common.
Comprehensive Nuclear Mater
If one uses a naıve approach in updating theneighbor list (an indiscriminate double loop over allparticles), then it will get expensive for more than afew thousand particles because it involves N�N
operations for an N-particle system. For short-rangeinteractions, where the interatomic potential can besafely taken to be zero outside of a cutoff rc, acceler-ated approaches exist that can reduce the number ofoperations from order-N2 to order-N. For example,in the so-called ‘cell lists’ approach,18 one partitionsthe supercell into many smaller cells, and each cellmaintains a registry of the atoms inside (order-Noperation). The cell dimension is chosen to be greaterthan rc, so an atom cannot possibly interact withmore than one neighbor atom. This will reduce thenumber of operations in updating the neighbor listto order-N.
With the so-called Parrinello–Rahman method,19
the supercell size and shape can change dynamicallyduring a MD simulation to equilibrate the internalstress with the externally applied constant stress. Inthese simulations, the supercell is generally non-orthogonal, and it becomes much easier to use theso-called scaled coordinates sj to represent particlepositions. The scaled coordinates sj are related to thereal coordinates rj through the relation, rj ¼ H � sj ,when both rj and sj are written as column vectors.H is a 3� 3 matrix whose columns are the threerepeat vectors of the simulation cell. Regardless ofthe shape of the simulation cell, the scaled coordi-nates of atoms can always be mapped into a unitcube, ½0; 1Þ � ½0; 1Þ � ½0; 1Þ. The shape change ofthe simulation cell with time can be accounted forby including the matrix H into the equation ofmotion. A ‘cell lists’ algorithm can still be workedout for a dynamically changing H, which minimizesthe number of updates.13
For modeling ionic crystals, the long-range elec-trostatic interactions must be treated differentlyfrom short-ranged interactions (covalent, metallic,van der Waals, etc.). This is because a brute-forceevaluation of the electrostatic interaction energiesinvolves computation between all ionic pairs,which is of the order N2, and becomes very time-consuming for large N. The so-called Ewald sum-mation20,21 decomposes the electrostatic interactioninto a short-ranged component, plus a long-rangedcomponent, which, however, can be efficientlysummed in the reciprocal space. It reduces thecomputational time to order N3/2. The particle meshEwald22–24 method further reduces the computationaltime to order N log N.
ials (2012), vol. 1, pp. 249-265

Molecular Dynamics 255
Author's personal copy
1.09.5 MD Properties
1.09.5.1 Property Calculations
Let hAi denote a time average over the trajectorygenerated by MD, where A is a dynamical variable,A(t). Two kinds of calculations are of common inter-est, equilibrium single-point properties and time-correlation functions. The first is a running timeaverage over the MD trajectories
hA i ¼ limt!1
1
t
ðto
dt 0Aðt 0Þ ½10�
with t taken to be as long as possible. In terms ofdiscrete time steps, eqn [10] becomes
hA i ¼ 1
L
XLk¼1
AðtkÞ ½11�
where L is the number of time steps in the trajectory.The second is a time-dependent quantity of the form
hAð0ÞBðtÞi ¼ 1
L0XL0k¼1
AðtkÞBðtk þ tÞ ½12�
where B is in general another dynamical variable,and L0 is the number of time origins. Equation [12]is called a correlation function of two-dynamical vari-ables; since it is manifestly time dependent, it is able torepresent dynamical information of the system.
We give examples of both types of averages byconsidering the properties commonly calculated inMD simulation.
U ¼XNi<j
V ðrij Þ* +
potential energy ½13�
T ¼ 1
3NkB
XNi¼1
mivi � vi* +
temperature ½14�
P¼ 1
3O
XNi¼1
mivi �vi �Xj>i
@V ðrij Þ@rij
rij
0@
1A* +
pressure ½15�
gðrÞ¼ 1
r4pr 2N
XNi¼1
Xj 6¼i
dðr �jri � rj jÞ* +
radial distribution function
½16�
MSDðtÞ¼ 1
N
XNi¼1
jriðtÞ� rið0Þj2
mean squared displacement
½17�
Comprehensive Nuclear Mater
vð0Þ �vðtÞh i¼ 1
N
XNi¼1
1
L0XL0k¼1
viðtkÞ �viðtkþ tÞ
velocity autocorrelation function
½18�
sab ¼Xi
va
O
� �siab; siab
¼ 1
va�mviavibþ
Xj>i
@V ðrij Þ@rij
rijarijb
rij
* +
Virial stress tensor
½19�
In eqn [19], va is the average volume of one atom,via is the a-component of vector vi, and rija is thea-component of vector ri � rj . The interest in writingthe stress tensor in the present form is to suggest thatthe macroscopic tensor can be decomposed intoindividual atomic contributions, and thus siab isknown as the atomic level stress25 at atom i. Althoughthis interpretation is quite appealing, one should beaware that such a decomposition makes sense onlyin a nearly homogeneous system where every atom‘owns’ almost the same volume as every other atom.In an inhomogeneous system, such as in the vicinityof a surface, it is not appropriate to consider suchdecomposition. Both eqns [15] and [19] are writtenfor pair potential models only. A slightly differentexpression is required for potentials that containmany-body terms.26
1.09.5.2 Properties That Make MD Unique
A great deal can be said about why MD is a usefulsimulation technique. Perhaps the most impor-tant statement is that, in this method, one follows theatomic motions according to the principles of classicalmechanics as formulated by Newton and Hamilton.Because of this, the results are physically as meaningfulas the potential U that is used. One does not have toapologize for anyapproximation in treating theN-bodyproblem. Whatever mechanical, thermodynamic, andstatistical mechanical properties that a system of Nparticles should have, they are all present in thesimulation data. Of course, how one extracts theseproperties from the simulation output – the atomictrajectories – determines how useful the simulation is.We can regard MD simulation as an ‘atomic video’ ofthe particle motion (which can be displayed as amovie), and how to extract the information in a scien-tifically meaningful way is up to the viewer. It is to beexpected that an experienced viewer can get muchmore useful information than an inexperienced one.
ials (2012), vol. 1, pp. 249-265

256 Molecular Dynamics
Author's personal copy
The above comments aside, we present herethe general reasons why MD simulation is useful (orunique). These are meant to guide the thinking ofthe nonexperts and encourage them to discoverand appreciate the many significant aspects of thissimulation technique.
(a) Unified study of all physical properties. Using MD,one can obtain the thermodynamic, structural,mechanical, dynamic, and transport propertiesof a system of particles that can be studied in asolid, liquid, or gas. One can even study chemicalproperties and reactions that are more difficultand will require using quantum MD, or anempirical potential that explicitly models chargetransfer.27
(b) Several hundred particles are sufficient to simulate bulk
matter. Although this is not always true, it is rathersurprising that one can get quite accurate ther-modynamic properties such as equation of statein this way. This is an example that the law oflarge numbers takes over quickly when one canaverage over several hundred degrees of freedom.
(c) Direct link between potential model and physical proper-
ties. This is useful from the standpoint of funda-mental understanding of physical matter. It is alsovery relevant to the structure–property correla-tion paradigm in material science. This attributehas been noted in various general discussionsof the usefulness of atomistic simulations inmaterial research.28–30
(d) Complete control over input, initial and boundary
conditions. This is what provides physical insightinto the behavior of complex systems. This isalso what makes simulation useful when com-bined with experiment and theory.
(e) Detailed atomic trajectories. This is what one obtainsfrom MD, or other atomistic simulation tech-niques, that experiment often cannot provide.For example, it is possible to directly computeand observe diffusion mechanisms that otherwisemay be only inferred indirectly from experi-ments. This point alone makes it compelling forthe experimentalist to have access to simulation.
We should not leave this discussion without remindingourselves that there are significant limitations to MDas well. The two most important ones are as follows:
(a) Need for sufficiently realistic interatomic potential
functions U. This is a matter of what we reallyknow fundamentally about the chemical bindingof the system we want to study. Progress is being
Comprehensive Nuclear Mater
made in quantum and solid-state chemistry andcondensed-matter physics; these advances willmake MD more and more useful in understand-ing and predicting the properties and behavior ofphysical systems.
(a) Computational-capability constraints. No computerswill ever be big enough and fast enough. On theother hand, things will keep on improving as faras we can tell. Current limits on how big and howlong are a billion atoms and about a microsecondin brute force simulation. A billion-atom MDsimulation is already at the micrometer lengthscale, in which direct experimental observations(such as transmission electron microscopy) areavailable. Hence, the major challenge in MDsimulations is in the time scale, because most ofthe processes of interest and experimental obser-vations are at or longer than the time scale of amillisecond.
1.09.6 MD Case Studies
In the following section, we present a set of casestudies that illustrate the fundamental concepts dis-cussed earlier. The examples are chosen to reflectthe application of MD to mechanical properties ofcrystalline solids and the behavior of defects inthem. More detailed discussions of these topics,especially in irradiated materials, can be found inChapter 1.11, Primary Radiation Damage For-mation and Chapter 1.12, Atomic-Level LevelDislocation Dynamics in Irradiated Metals.
1.09.6.1 Perfect Crystal
Perhaps the most widely used test case for an atomis-tic simulation program, or for a newly implementedpotential model, is the calculation of equilibriumlattice constant a0, cohesive energy Ecoh, and bulkmodulus B. Because this calculation can be performedusing a very small number of atoms, it is also a widelyused test case for first-principle simulations (seeChapter 1.08, Ab Initio Electronic Structure Cal-culations for Nuclear Materials). Once the equilib-rium lattice constants have been determined, we canobtain other elastic constants of the crystal in additionto the bulk modulus. Even though these calculationsare not MD per se, they are important benchmarks thatpractitioners usually perform, before embarking onMD simulations of solids. This case study is discussedin Section 1.09.6.1.1.
ials (2012), vol. 1, pp. 249-265

Molecular Dynamics 257
Author's personal copy
Following the test case at zero temperature, MDsimulations can be used to compute the mechanicalproperties of crystals at finite temperature. Beforecomputing other properties, the equilibrium latticeconstant at finite temperature usually needs to bedetermined first, to account for the thermal expan-sion effect. This case study is discussed in Section1.09.6.1.2.
1.09.6.1.1 Zero-temperature properties
In this test case, let us consider a body-centeredcubic (bcc) crystal of Tantalum (Ta), described bythe Finnis–Sinclair (FS) potential.31 The calculationsare performed using the MDþþ program. The sourcecode and the input files for this and subsequenttest cases in this chapter can be downloadedfrom http://micro.stanford.edu/wiki/Comprehensive_Nuclear_Materials_MD_Case_Studies.
The cut-off radius of the FS potential for Ta is4.20 A. To avoid interaction between an atom with itsown periodic images, we consider a cubic simulationcell whose size is much larger than the cut-off radius.The cell dimensions are 5[100], 5[010], and 5[001]along x, y, and z directions, and the cell containsN¼ 250 atoms (because each unit cell of a bcccrystal contains two atoms). PBC are applied in allthree directions. The experimental value of the equi-librium lattice constant of Ta is 3.3058 A. Therefore,to compute the equilibrium lattice constant of thispotential model, we vary the lattice constant a from3.296 to 3.316 A, in steps of 0.001 A. The potentialenergy per atom E as a function of a is plotted inFigure 5. The data can be fitted to a parabola. The
−8.0990
−8.0992
−8.0994
−8.0996
−8.0998
−8.1
3.295
E (e
V)
3.300 3.305
a0 (Å)
3.310 3.315
Figure 5 Potential energy per atom as a function of latticeconstant of Ta. Circles are data computed from the FS
potential, and the line is a parabola fitted to the data.
Comprehensive Nuclear Mater
location of the minimum is the equilibrium latticeconstant, a0¼ 3.3058 A. This exactly matches theexperimental data because a0 is one of the fittedparameters of the potential. The energy per atom ata0 is the cohesive energy, Ecoh¼�8.100 eV, which isanother fitted parameter. The curvature of paraboliccurve at a0 gives an estimate of the bulk modulus,B¼ 197.2GPa. However, this is not a very accurateestimate of the bulk modulus because the range of a isstill too large. For a more accurate determination ofthe bulk modulus, we need to compute the E(a) curveagain in the range of ja � a0j<10�4 A. The curvatureof the E(a) curve at a0 evaluated in the second calcu-lation gives B¼ 196.1GPa, which is the fitted bulkmodulus value of this potential model.31
When the crystal has several competing phases(such as bcc, face-centered cubic, and hexagonal-closed-packed), plotting the energy versus volume(per atom) curves for all the phases on the samegraph allows us to determine the most stable phaseat zero temperature and zero pressure. It also allowsus to predict whether the crystal will undergo a phasetransition under pressure.32
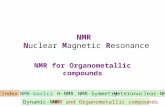
Other elastic constants besides B can be computedusing similar approaches, that is, by imposing astrain on the crystal and monitoring the changes inpotential energy. In practice, it is more convenientto extract the elastic constant information from thestress–strain relationship. For cubic crystals, such asTa considered here, there are only three independentelastic constants, C11, C12, and C44. C11 and C12 canbe obtained by elongating the simulation cell in thex-direction, that is, by changing the cell length intoL ¼ ð1þ exxÞ � L0, where L0 ¼ 5a0 in this test case.This leads to nonzero stress components sxx, syy, szz,as computed from the Virial stress formula [19],as shown in Figure 6 (the atomic velocities arezero because this calculation is quasistatic). Theslope of these curves gives two of the elastic con-stants C11¼ 266.0GPa and C12¼ 161.2GPa. Theseresults can be compared with the bulk modulusobtained from potential energy, due to the relationB ¼ ðC11 þ 2C12Þ=3 ¼ 196:1GPa.
C44 can be obtained by computing the shearstress sxy caused by a shear strain exy. Shear strainexy can be applied by adding an off-diagonal elementin matrix H that relates scaled and real coordinatesof atoms.
H ¼L0 2exyL0 00 L0 00 0 L0
24
35 ½20�
ials (2012), vol. 1, pp. 249-265

30
20
sxx
syy
sxy10
−10
−20
−300
Strain � 10−4−1 1
0
Str
ess
(MP
a)
Figure 6 Stress–strain relation for FS Ta: sxx and syy asfunctions of exx and sxy as a function of exy.
258 Molecular Dynamics
Author's personal copy
The slope of the shear stress–strain curve gives theelastic constant C44¼ 82.4GPa.
In this test case, all atoms are displaced accordingto a uniform strain, that is, the scaled coordinatesof all atoms remain unchanged. This is correct forsimple crystal structures where the basis containsonly one atom. For complex crystal structures withmore than one basis atom (such as the diamond-cubicstructure of silicon), the relative positions of atoms inthe basis set will undergo additional adjustments whenthe crystal is subjected to a macroscopically uniformstrain. This effect can be captured by performingenergy minimization at each value of the strain beforerecording the potential energy or the Virial stressvalues. The resulting ‘relaxed’ elastic constants corre-spond well with the experimentally measured values,whereas the ‘unrelaxed’ elastic constants usuallyoverestimate the experimental values.
1.09.6.1.2 Finite-temperature properties
Starting from the perfect crystal at equilibrium latticeconstant a0, we can assign initial velocities to theatoms and perform MD simulations. In the simplestsimulation, no thermostat is introduced to regulatethe temperature, and no barostat is introduced toregulate the stress. The simulation then correspondsto the NVE ensemble, where the number of particlesN, the cell volume V (as well as shape), and totalenergy E are conserved. This simulation is usu-ally performed as a benchmark to ensure that thenumerical integrator is implemented correctly andthat the time step is small enough.
The instantaneous temperature T inst is definedin terms of the instantaneous kinetic energy K
Comprehensive Nuclear Mater
through the relation K � ð3N=2ÞkBT inst, where kBis Boltzmann’s constant. Therefore, the velocity canbe initialized by assigning random numbers to eachcomponent of every atom and scaling them so thatT inst matches the desired temperature. In practice,T inst is usually set to twice the desired temperaturefor MD simulations of solids, because approximatelyhalf of the kinetic energy flows to the potentialenergy as the solids reach thermal equilibrium.We also need to subtract appropriate constants fromthe x, y, z components of the initial velocities to makesure the center-of-mass linear momentum of theentire cell is zero. When the solid contains surfacesand is free to rotate (e.g., a nanoparticle or ananowire), care must be taken to ensure that thecenter-of-mass angular momentum is also zero.
Figure 7(a) plots the instantaneous temperatureas a function of time, for an MD simulation startingwith a perfect crystal and T inst¼ 600K, using theVelocity Verlet integrator13 with a time step ofDt¼ 1 fs. After 1 ps, the temperature of the simulationcell is equilibrated around 300K. Due to the finitetime step Dt, the total energy E, which should bea conserved quantity in Hamiltonian dynamics,fluctuates during the MD simulation. In this simula-tion, the total energy fluctuation is <2� 10–4 eV peratom, after equilibrium has been reached (t> 1 ps).There is also zero long-term drift of the total energy.This is an advantage of symplectic integrators11,12
and also indicates that the time step is small enough.The stress of the simulation cell can be computed by
averaging the Virial stress for time between 1 and 10ps.A hydrostatic pressure P � �ðsxx þ syy þ szzÞ=3 ¼1:33 0:01GPa is obtained. The compressive stressdevelops because the crystal is constrained at thezero-temperature lattice constant. A convenient wayto find the equilibrium lattice constant at finite tem-perature is to introduce a barostat to adjust the vol-ume of the simulation cell. It is also convenientto introduce a thermostat to regulate the temperatureof the simulation cell. When both the barostat andthermostat are applied, the simulation correspondsto the NPT ensemble.
The Nose–Hoover thermostat11,33,34 is widelyused for MD simulations in NVT and NPT ensem-bles. However, care must be taken when applying itto perfect crystals at medium-to-low temperatures,in which the interaction between solid atoms is closeto harmonic. In this case, the Nose–Hoover thermo-stat has difficulty in correctly sampling the equi-librium distribution in phase space, as indicated byperiodic oscillation of the instantaneous temperature.
ials (2012), vol. 1, pp. 249-265

0.5 1 1.5 2 2.50
200
400
600
Tinst
(K)
t (ps)0
(a)
30
1
2
p (G
Pa)
0
(b)
20 40 60 80 100
250
300
350
Tinst
(K)
t (ps)
−2
0
2
p (G
Pa)
Figure 7 (a) Instantaneous temperature Tinst and Virial pressure p as functions of time in an NVE simulation with initial
temperature at 600 K. (b) Tinst and P in a series of NVT at T ¼ 300 K, where the simulation cell length L is adjustedaccording to the averaged value of P.
Molecular Dynamics 259
Author's personal copy
The Nose–Hoover chain35 method has been devel-oped to address this problem.
The Parrinello–Rahman19 method is a widelyused barostat for MD simulations. However, periodicoscillations in box size are usually observed duringequilibration of solids. This oscillation can take a verylong time to die out, requiring an unreasonably longtime to reach equilibrium (after which meaningfuldata can be collected). A viscous damping term isusually added to the box degree of freedom to accel-erate the speed of equilibration. Here, we avoid theproblem by performing a series of NVT simulations,each one lasting for 1 ps using the Nose–Hooverchain method with Velocity Verlet integrator andDt¼ 1 fs. Before starting each new simulation, thesimulation box is subjected to an additional hydro-static elastic strain of e ¼ hPi=B0 , where hPi is theaverage Virial pressure of the previous simulation,where B0 ¼ 2000GPa is an empirical parameter.
The instantaneous temperature and Virial pressureduring 100 of these NVT simulations are plotted inFigure 7(b). The instantaneous temperature fluctuatesnear the desired temperature (300K) nearly from thebeginning of the simulation. The Virial pressure is wellrelaxed to zero at t¼ 20 ps. The average box size from50 to 100 ps is L¼ 16.5625 A, which is larger thanthe initial value of 16.5290 A. This means that thenormal strain caused by thermal expansion at 300K isexx¼ 0.00203. Hence, the coefficient of thermal expan-sion is estimated to be a ¼ exx=T ¼ 6:8� 10�6K�1:35
1.09.6.2 Dislocation
Dislocations are line defects in crystals, and theirmotion is the carrier for plastic deformation of
Comprehensive Nuclear Mater
crystals under most conditions (T<Tm/2).36,37 The
defects produced by irradiation (such as vacancy andinterstitial complexes) interact with dislocations,and this interaction is responsible for the change inthe mechanical properties by irradiation (such asembrittlement).38 MD simulations of dislocationinteraction with other defects are discussed in detailin Chapter 1.12, Atomic-Level Level DislocationDynamics in Irradiated Metals. Here, we describea more basic case study on the mobility of an edgedislocation in Ta. In Section 1.09.6.2.1, we describethe method of computing its Peierls stress, whichis the critical stress to move the dislocation at zerotemperature. In Section 1.09.6.2.2, we describe howto compute the mobility of this dislocation at finitetemperature by MD.
1.09.6.2.1 Peierls stress at zero temperature
Dislocations in the dominant slip system in bccmetals have h111i=2 Burgers vectors and {110} slipplanes. Here, we consider an edge dislocation withBurgers vector b ¼ 1=2½111� (along x-axis), slip planenormal ½110� (along y-axis), and line direction ½1 12�(along z-axis). To prepare the atomic configuration,we first create a perfect crystal with dimensions30½111�, 40½110�, 2½ 1 12� along the x-, y-, z-axes.We then remove one-fourth of the atomic layersnormal to the y-axis to create two free surfaces,as shown in Figure 8(a).
We introduce an edge dislocation dipole into thesimulation cell by displacing the positions of allatoms according to the linear elasticity solution ofthe displacement field of a dislocation dipole. Tosatisfy PBC, the displacement field is the sum of thecontributions from not only the dislocation dipole
ials (2012), vol. 1, pp. 249-265

Dislocation
Cut plane b
(a) (b)
y
x
Figure 8 (a) Schematics showing the edge dislocationdipole in the simulation cell. b is the dislocation Burgers
vector of the upper dislocation. Atoms in shaded regions are
removed. (b) Core structure of edge dislocation (at the
center) and surface atoms in FS Ta after relaxationvisualized by Atomeye.41 Atoms are colored according to
their central-symmetry deviation parameter. Adapted from
Li, J. InHandbook ofMaterialsModeling; Yip, S., Ed.; Springer:Dordrecht, 2005; pp 1051–1068; Mistake-free version at
http://alum.mit.edu/www/liju99/Papers/05/Li05-2.31.pdf;
Kelchner, C. L.; Plimpton, S. J.; Hamilton, J. C. Phys. Rev. B
1998, 58, 11085.
260 Molecular Dynamics
Author's personal copy
inside the cell, but also its periodic images. Care mustbe taken to remove the spurious term caused by theconditional convergence of the sum.26,40–42 Becausethe Burgers vector b is perpendicular to the cut-plane connecting the two dislocations in the dipole,atoms separated from the cut-plane by <jbj=2 in thex-direction need to be removed. The resulting struc-ture contains 21 414 atoms. The structure is subse-quently relaxed to a local energy minimum with zeroaverage stress. Because one of the two dislocations inthe dipole is intentionally introduced into the vacuumregion, only one dislocation remains after the relaxa-tion, as shown in Figure 8(b).
The dislocation core is identified by centralsymmetry analysis,13 which characterizes the degreeof inversion-symmetry breaking. In Figure 8(b), onlyatoms with a central symmetry deviation (CSD)parameter larger than 1.5 A2 are plotted. Atoms withCSD parameter between 0.6 and 6 A2 appear at thecenter of the cell and are identified with the disloca-tion core. Atoms with a CSD parameter between10 and 20 A2 appear at the top and bottom of thecell and are identified with the free surfaces.
The edge dislocation thus created will move alongthe x-direction when the shear stress sxy exceedsa critical value. To compute the Peierls stress, weapply shear stress sxy by adding external forces onsurface atoms. The total force on the top surface
Comprehensive Nuclear Mater
atoms points in the x-direction and has magnitudeof Fx ¼ sxyLxLz . The total force on the bottom sur-face atoms has the same magnitude but points inthe opposite direction. These forces are equallydistributed on the top (and bottom) surface atoms.Because we have removed some atoms when creatingthe edge dislocation, the bottom surface layer hasfewer atoms than the top surface layer. As a result,the external force on each atom on the top surface isslightly lower than that on each atom on the bottomsurface.
We apply shear stress sxy in increments of 1MPaand relax the structure using the conjugate gradientalgorithm at each stress. The dislocation (as identifiedby the core atoms) does not move for sxy< 27MPabut moves in the x-direction during the relaxation atsxy¼ 28MPa. Therefore, this simulation predictsthat the Peierls stress of edge dislocation in Ta (FSpotential) is 28 1MPa. The Peierls stress computedin this way can depend on the simulation cell size.Therefore, we will need to repeat this calculation forseveral cell sizes to obtain a more reliable predictionof the Peierls stress. There are other boundaryconditions that can be applied to simulate disloca-tions and compute the Peierls stress, such as PBCs inboth x- and y-directions,42 and the Green’s functionboundary condition.44 Different boundary conditionshave different size dependence on the numericalerror of the Peierls stress.
The simulation cell in this study contains two freesurfaces and one dislocation. This is designed tominimize the effect of image forces from the bound-ary conditions on the computed Peierls stress. If thesurfaces were not created, the simulation cell wouldhave to contain at least two dislocations so that thetotal Burgers vector content was zero. On applicationof the stress, the two dislocations in the dipole wouldmove in opposite directions, and the total energywould vary as a function of their relative position.This would create forces on the dislocations, in addi-tion to the Peach–Koehler force from the appliedstress, and would lead to either overestimation orunderestimation of the Peierls stress. On the contrary,the simulation cell described above has only onedislocation, and as it moves to an equivalent latticesite in the x-direction, the energy does not changedue to the translational symmetry of the lattice. Thismeans that, by symmetry, the image force on thedislocation from the boundary conditions is iden-tically zero, which leads to more accurate Peierlsstress predictions. However, when the simulationcell is too small, the free surfaces in the y-direction
ials (2012), vol. 1, pp. 249-265

Molecular Dynamics 261
Author's personal copy
and the periodic images in the x-direction can stillintroduce (second-order) effects on the critical stressfor dislocation motion, even though they do notproduce any net force on the dislocation.
1.09.6.2.2 Mobility at finite temperature
The relaxed atomic structure from Section 1.09.6.2.1at zero stress can be used to construct initialconditions for MD simulations for computing dislo-cation mobility at finite temperature. The dislocationin Section 1.09.6.2.1 is periodic along its length(z-axis) with a relatively short repeat distanceð2½1 12�Þ. In a real crystal, the fluctuation of thedislocation line can be important for its mobility.Therefore, we extend the simulation box length byfive times along z-axis by replicating the atomicstructure before starting the MD simulation. Thus,the MD simulation cell has dimensions 30[111],40½110�, 10½1 12� along the x, y, z axes, respectively,and contains 10 7070 atoms.
In the following section, we compute the disloca-tion velocity at several shear stresses at T¼ 300K.For simplicity, the simulation in which the shearstress is applied is performed under the NVTensem-ble. However, the volume of the simulation cell needsto be adjusted from the zero-temperature value toaccommodate the thermal expansion effect. Thecell dimensions are adjusted by a series of NVTsimulations using an approach similar to that used inSection 1.09.6.1.2, except that exx, eyy, ezz are allowedto adjust independently. As we have found in Section1.09.6.1.2 that for a perfect crystal, the thermal strainat 300K is e¼ 0.00191, exx , eyy , ezz are initialized to thisvalue at the beginning of the equilibration.
2000
1500
1000
500
00 100
(a)
200
t (ps)
300
20 MPa
40 MPa
60 MPa
80 MPa
100 MPa
400 500
(Å)
á
á
x
Figure 9 (a) Average position of dislocation core atoms as a f
velocity as a function of sxy at T ¼ 300 K.
Comprehensive Nuclear Mater
After the equilibration for 10 ps, we performMD simulation under different shear stresses sxyup to 100MPa. The simulations are performedunder the NVT chain method using the VelocityVerlet algorithm with Dt¼ 1 fs. The shear stress isapplied by adding external forces on surface atoms, inthe same way as in Section 1.09.6.2.1. The atomicconfigurations are saved periodically every 1 ps. Foreach saved configuration, the CSD parameter45 ofeach atom is computed. Due to thermal fluctuation,certain atoms in the bulk can also have CSD valuesexceeding 0.6 A2. Therefore, only the atoms whoseCSD value is between 4.5 and 10.0 A2 are classified asdislocation core atoms.
Figure 9(a) plots the average position hxi of dis-location core atoms as a function of time at differentapplied stresses. Due to PBC in x-direction, it ispossible to have certain core atoms at the left edgeof the cell with other core atoms at the right edge ofthe cell, when the dislocation core moves to the cellborder. In this case, we need to ensure that all atomsare within the nearest image of one another, whencomputing their average position in x-direction.When the configurations are saved frequentlyenough, it is impossible for the dislocation to moveby more than the box length in the x-direction sincethe last time the configuration was saved. Therefore,the average dislocation position hxi at a given snap-shot is taken to be the nearest image of the averagedislocation position at the previous snapshot sothat the hxiðtÞ plots in Figure 9(a) appear as smoothcurves.
Figure 9(a) shows that all the hxiðtÞ curvesat t¼ 0 have zero slope and nonzero curvature,
00 20 40 60
sxy (MPa)80 100
(b)
100
200
300
v (m
s−1)
400
500
600
unction of time at different shear stresses. (b) Dislocation
ials (2012), vol. 1, pp. 249-265

262 Molecular Dynamics
Author's personal copy
indicating that the dislocation is accelerating. Even-tually, hxi becomes a linear function of t, indicatingthat the dislocation has settled down into steady-statemotion. The dislocation velocity is computed fromthe slope of the hxiðtÞ in the second half of the timeperiod. Figure 9(b) plots the dislocation velocityobtained in this way as a function of the appliedshear stress. The dislocation velocity appears to bea linear function of stress in the low stress limit,with mobility M ¼ v=ðsxy � bÞ ¼ 2:6� 104 Pa�1 s�1.Dislocation mobility is one of the important materialinput parameters to dislocation dynamics (DD)simulations.46–48
For accurate predictions of the dislocation veloc-ity and mobility, MD simulations must be performedfor a long enough time to ensure that steady-statedislocation motion is observed. The simulation cellsize also needs to be varied to ensure that theresults have converged to the large cell limit. Forlarge simulation cells, parallel computing is usuallynecessary to speed up the simulation. The LAMMPSprogram49 (http://lammps.sandia.gov) developed atSandia National Labs is a parallel simulation programthat has been widely used for MD simulations ofsolids.
1.09.7 Perspective
The previous sections give a hands-on introduc-tion to the basic techniques of MD simulation.More involved discussions of the technical aspectsmay be found in the literature.30 Here, we offercomments on several enduring attributes of MDfrom the standpoint of benefits and drawbacks,along with an outlook on future development.
MD has an unrivalled ability for describingmaterial geometry, that is, structure. The Greek phi-losopher Democritus (ca. 460 BCE–370 BCE) recog-nized early on that the richness of our world arosefrom an assembly of atoms. Even without very sophis-ticated interatomic potentials, a short MD simulationrun will place atoms in quite ‘reasonable’ locationswith respect to each other so that their cores do notoverlap. This does not mean that the atomic positionsare correct, as there could be multiple metastableconfigurations, but it provides reasonable guesses.Unlike some other simulation approaches, MD iscapable of offering real geometric surprises, that isto say, providing new structures that the modelerwould never have expected before the simulationrun. For this reason, visualization of atomistic
Comprehensive Nuclear Mater
structure at different levels of abstraction is veryimportant, and there are several pieces of free soft-ware for this purpose.13,50,51
As the ball-and-stick model of DNA by Watsonand Crick52 was nothing but an educated guessbased on atomic radii and bond angles, MD simula-tions can be regarded as ‘computational Watson andCrick’ that are potentially powerful for structuraldiscovery. This remarkable power is both a blessingand a curse for modelers, depending on how it isharnessed. Remember that Watson and Crick hadX-ray diffraction data against which to check theirstructural model. Therefore, it is very important tocheck the MD-obtained structures against experiments(diffraction, high-resolution transmission electronmicroscopy, NMR, etc.) and ab initio calculationswhenever one can.
Another notable allure of MD simulations is thatit creates a ‘perfect world’ that is internally consis-tent, and all the information about this world isaccessible. If MD simulation is regarded as a numeri-cal experiment, it is quite different from real experi-ments, which all practitioners know are ‘messy’ andinvolve extrinsic factors. Many of these extrinsic fac-tors may not be well controlled, or even properlyidentified, for instance, moisture in the carrier gas,initial condition of the sample, the effects of vibra-tion, thermal drift, and so on. The MD ‘world’ ismuch smaller, with perfectly controlled initial condi-tions and boundary conditions. In addition, realexperiments can only probe a certain aspect, a smallsubset of the properties, while MD simulation givesthe complete information. When the experimentalresult does not work out as expected, there could beextraneous factors, such as a vacuum leak, impurityin the reagents, and so on that could be very difficultto trace back. In contrast, when a simulation gives aresult that is unexpected, there is always a way tounderstand it, because one has complete control ofthe initial conditions, boundary conditions, and allthe intermediate configurations. One also has accessto the code itself. A simulation, even if a wrong one(with bugs in the program), is always repeatable.Not so with actual experiments.
It is certainly true that any interatomic potentialused in an MD simulation has limitations, whichmeans the simulation is always an approximation ofthe real material. It also can happen that the limita-tions are not as serious as one might think, such as inestablishing a conceptual framework for fundamentalmechanistic studies. This is because the value of MDis much greater than simply calculating material
ials (2012), vol. 1, pp. 249-265

Molecular Dynamics 263
Author's personal copy
parameters. MD results can contribute a great dealtowards constructing a conceptual framework andsome kind of analytical model. Once the conceptualframework and analytical model are established, theparameters for a specific material may be obtained bymore accurate ab initio calculations or more readilyby experiments. It would be bad practice to regardMD simulation primarily as a black box that canprovide a specific value for some property, withouta deeper analysis of the trajectories and interpreta-tion in light of an appropriate framework. Such aframework, external to the MD simulation, is oftenbroadly applicable to a variety of materials; for exam-ple, the theory and expressions of solute strengthen-ing in alloys based on segregation in the dislocationcore. If solute strengthening occurs in a wide varietyof materials, then it should also occur in ‘computermaterials.’ Indeed, the ability to parametrically tunethe interatomic potential, to see which energeticaspect is more important for a specific behavior orproperty, is a unique strength of MD simulationscompared with experiments. One might indeedargue that the value of science is to reduce the com-plex world to simpler, easier-to-process models. Ifone wants only all the unadulterated complexity,one can just look at the world without doing anything.Thus, the main value of simulation should not be inthe final result but also in the process, and the role ofsimulations should be to help simplify and clarify, notjust to reproduce, the complexity. According to thisview, the problem with a specific interatomic poten-tial is not that it does not work, but that it is notknown which properties the potential can describeand which it cannot, and why.
There are also fundamental limitations in the MDsimulation method that deserve comment. The algo-rithm is entirely classical, that is, it is Newtonianmechanics. As such, it misses relativistic and quantumeffects. Below the Debye temperature,53 quan-tum effects become important. The equipartitiontheorem from classical statistical mechanics, statingthat every degree of freedom possesses kBT/2 kineticenergy, breaks down for the high-frequency modes atlow temperatures. In addition to thermal uncertain-ties in a particle’s position and momentum, there arealso superimposed quantum uncertainties (fluctua-tions), reflected by the zero-point motion. Theseeffects are particularly severe for light-mass elementssuch as hydrogen.54 There exist rigorous treatmentsfor mapping the equilibrium thermodynamics ofa quantum system to a classical dynamics system.For instance, path-integral molecular dynamics
Comprehensive Nuclear Mater
(PIMD)55,56 can be used to map each quantum particleto a ring of identical classical particles connected byPlanck’s constant-dependent springs to represent quan-tum fluctuations (the ‘multi-instance’ classical MDapproach). There are also approaches that correct forthe quantum heat capacity effect with single-instanceMD.53,57 For quantum dynamical properties outside ofthermal equilibrium, or even for evaluating equilibriumtime-correlation functions, the treatment based on anMD-like algorithm becomes even more complex.58–60
It is well recognized in computational materialresearch that MD has a time-scale limitation. Unlikeviscous relaxation approaches that are first orderin time, MD is governed by Newtonian dynamicsthat is second order in time. As such, inertia andvibration are essential features of MD simulation.The necessity to resolve atomic-level vibrationsrequires the MD time step to be of the orderpicosecond/100, where a picosecond is the charac-teristic time period for the highest-frequency oscilla-tion mode in typical materials, and about 100 stepsare needed to resolve a full oscillation period withsufficient accuracy. This means that the typicaltimescale of MD simulation is at the nanosecondlevel, although with massively parallel computer andlinear-scaling parallel programs such as LAMMPS,49
one may push the simulations to microsecond tomillisecond level nowadays. A nanosecond-levelMD simulation is often enough for the convergenceof physical properties such as elastic constants, ther-mal expansion, free energy, thermal conductivity,and so on. However, chemical reaction processes,diffusion, and mechanical behavior often depend onevents that are ‘rare’ (seen at the level of atomicvibrations) but important, for instance, the emissionof a dislocation from grain boundary or surface.61
There is no need to track atomic vibrations, impor-tant as they are, for time periods much longer thana nanosecond for any particular atomic configura-tion. Important conceptual and algorithmic advanceswere made in the so-called Accelerated MolecularDynamics approaches,62–66 which filter out repetitivevibrations and are expected to become more widelyused in the coming years.
. . . Above all, it seems to me that the human mind
sees only what it expects.
These are the words of Emilio Segre (Noble Prize inPhysics, 1959, for the discovery of the antiproton) in ahistorical account of the discovery of nuclear fissionby O. Hahn and F. Strassmann,67 which led to a NobelPrize in Chemistry, 1944, for Hahn. Prior to the
ials (2012), vol. 1, pp. 249-265

264 Molecular Dynamics
Author's personal copy
discovery, many well-known scientists had worked onthe problem of bombarding uranium with neutrons,including Fermi in Rome, Curie in Paris, and Hahnand Meitner in Berlin. All were looking for the pro-duction of transuranic elements (elements heavierthan uranium), and none were open minded enoughto recognize the fission reaction. As atomistic simula-tion can be regarded as an ‘atomic camera,’ it wouldbe wise for anyone who wishes to study naturethrough modeling and simulation to keep an openmind when interpreting simulation results.
Acknowledgments
W. Cai appreciates the assistance from KeonwookKang and Seunghwa Ryu in constructing the casestudies and acknowledges support by NSF grantCMS-0547681, AFOSR grant FA9550-07-1-0464,and the Army High Performance ComputingResearch Center at Stanford. J. Li acknowledges sup-port by NSF grant CMMI-0728069 and DMR-1008104, MRSEC grant DMR-0520020, and AFOSRgrant FA9550-08-1-0325.
References
1. Guerin, Y.; Was, G. S.; Zinkle, S. J. MRS Bull. 2009, 34(1),10–19.
2. Basic Research Needs for Advanced Nuclear EnergySystems: Report of the Basic Energy Sciences Workshopon Basic Research Needs for Advanced Nuclear EnergySystems; U.S. Department of Energy Office of BasicEnergy Sciences, 2006.
3. Simulation Based Engineering Science – RevolutionizingEngineering Science Through Simulation; NationalScience Foundation, 2006.
4. Science Based Nuclear Energy Systems Enabled byAdvanced Modeling and Simulation at the Extreme Scale;U.S. Department of Energy’s Offices of Science andNuclear Energy, 2009.
5. Kopetskii, C. V.; Pashkovskii, A. I. Phys. Stat. Solidif. A1974, 21.
6. Marian, J.; Cai, W.; Bulatov, V. V. Nat. Mater. 2004, 3, 158.7. Bulatov, V. V.; Cai, W. Phys. Rev. Lett. 2002, 89, 115501.8. Bulatov, V. V.; Hsiung, L. L.; Tang, M.; et al. Nature 2006,
440, 1174.9. Integrated Computational Materials Engineering:
A TransformationalDiscipline for ImprovedCompetitivenessand National Security; National Research Council, 2008.
10. Verlet, L. Phys. Rev. 1967, 159(1), 98–103.11. Frenkel, D.; Smit, B. Understanding Molecular Simulation:
From Algorithms to Applications, Academic Press:New York, 2002.
12. Yoshida, H. Phys. Lett. A 1990, 150(5–7), 262–268.13. Li, J. In Handbook of Materials Modeling; Yip, S., Ed.;
Springer, 2005; pp 565–588; Mistake free version athttp://alum.mit.edu/www/liju99/Papers/05/Li05-2.8.pdf.
Comprehensive Nuclear Mater
14. Finnis, M. Interatomic Forces in Condensed Matter;Oxford University Press: Oxford, 2003.
15. Born, M.; Oppenheimer, R. Ann. Phys. 1927, 84(20),457–484.
16. Stillinger, F. H.; Weber, T. A. Phys. Rev. B 1985, 31,5262–5271.
17. Daw, M. S.; Baskes, M. I. Phys. Rev. B 1984, 29,6443–6453.
18. Allen, M. P.; Tildesley, D. J., Computer Simulation ofLiquids; Clarendon Press: New York, 1987.
19. Parrinello, M.; Rahman, A. J. Appl. Phys. 1981, 52(12),7182–7190.
20. Ewald, P. P. Ann. Phys. 1921, 64(3), 253–287.21. de Leeuw, S. W.; Perram, J. W.; Smith, E. R. Proc. Roy.
Soc. Lond. A 1980, 373, 27–56.22. Darden, T.; York, D.; Pedersen, L. J. Chem. Phys. 1993,
98, 10089–10093.23. Essmann, U.; Perera, L.; Berkowitz, M. L.; Darden, T.;
Lee, H.; Pedersen, L. G. J. Chem. Phys. 1995, 103(19),8577–8593.
24. Deserno, M.; Holm, C. J. Chem. Phys. 1998, 109(18),7678–7701.
25. Srolovitz, D.; Vitek, V.; Egami, T. Acta Metall. 1983, 31(2),335–352.
26. Bulatov, V. V.; Cai, W. Computer Simulations ofDislocations; Oxford University Press: Oxford, 2006.
27. Streitz, F. H.; Mintmire, J. W. Phys. Rev. B 1994, 50(16),11996–12003.
28. Yip, S. In Molecular-Dynamics Simulation of Statistical-Mechanical Systems; Ciccotti, G.; Hoover, W. G., Eds.;North-Holland: Amsterdam, 1986; pp 523–561.
29. Yip, S. Nat. Mater. 2003, 2(1), 3–5.30. Yip, S. Handbook of Materials Modeling; Springer:
Dordrecht, 2005.31. Finnis, M. W.; Sinclair, J. E. Philos. Mag. A Phys.Condens.
Matter Struct. Defects Mech. Prop. 1984, 50(1), 45–55.32. Muller, M.; Erhart, P.; Albe, K. J. Phys. Condens. Matter
2007, 19(32), 326220–326243.33. Nose, S. Mol. Phys. 1984, 52(2), 255–268.34. Hoover, W. G. Phys. Rev. A 1985, 31(3), 1695–1697.35. Martyna, G. J.; Klein, M. L.; Tuckerman, M. J. Chem. Phys.
1992, 97(4), 2635–2643.36. Ryu, S.; Cai, W.Model. Simul. Mater. Sci. Eng. 2008, 16(8),
085005–085017.37. Frost, H. J.; Ashby, M. F. Deformation-Mechanism Maps;
Pergamon Press: Oxford, 1982.38. Hirth, J. P.; Lothe, J. Theory of Dislocations; Wiley:
New York, 1982; 2nd edn.39. de la Rubia, T. D.; Zbib, H. M.; Khraishi, T. A.; Wirth, B. D.;
Victoria, M.; Caturla, M. J. Nature 2000, 406(6798),871–874.
40. Li, J. Model. Simul. Mater. Sci. Eng. 2003, 11(2), 173–177.41. Cai, W.; Bulatov, V. V.; Chang, J. P.; Li, J.; Yip, S. Phys.
Rev. Lett. 2001, 86(25), 5727–5730.42. Cai, W.; Bulatov, V. V.; Chang, J. P.; Li, J.; Yip, S. Philos.
Mag. 2003, 83(5), 539–567.43. Li, J.; Wang, C. Z.; Chang, J. P.; Cai, W.; Bulatov, V. V.;
Ho,K.M.; Yip, S.Phys.Rev.B2004,70(10), 104113–104121.44. Woodward, C.; Rao, S. Philos. Mag. A 2001, 81,
1305–1316.45. Kelchner, C. L.; Plimpton, S. J.; Hamilton, J. C. Phys. Rev.
B 1998, 58, 11085–11088.46. van der Giessen, E.; Needleman, A. Model. Simul. Mater.
Sci. Eng. 1995, 3, 689–735.47. Tang, M.; Kubin, L. P.; Canova, G. R. Acta Mater. 1998, 46,
3221–3235.48. Cai, W.; Bulatov, V. V.; Chang, J.; Li, J.; Yip, S.,
In Dislocations in Solids; Nabarro, F. R. N.; Hirth, J. P.,Eds.; Elsevier: Amsterdam, 2004; Vol. 12, pp 1–80.
ials (2012), vol. 1, pp. 249-265

Molecular Dynamics 265
Author's personal copy
49. Plimpton, S. J. Comput. Phys. 1995, 117(1), 1–19.50. Bhattarai, D.; Karki, B. B. J. Mol. Graph. 2009, 27(8),
951–968.51. Stukowski, A. Model. Simul. Mater. Sci. Eng. 2010, 18(1),
015012.52. Watson, J. D.; Crick, F. H. C. Nature 1953, 171, 737.53. Li, J.; Porter, L.; Yip, S. J. Nucl. Mater. 1998, 255(2–3),
139–152.54. Mills, G.; Jonsson, H.; Schenter, G. K. Surf. Sci. 1995,
324(2–3), 305–337.55. Chandler, D.; Wolynes, P. G. J. Chem. Phys. 1981, 74(7),
4078–4095.56. Sprik, M. In Computer Simulation in Materials Science:
Interatomic Potentials, Simulation Techniques andApplications; Meyer, M., Pontikis, V., Eds.; Kluwer:Dordrecht, 1991; pp 305–320.
57. Dammak, H.; Chalopin, Y.; Laroche, M.; Hayoun, M.;Greffet, J. J. Phys. Rev. Lett. 2009, 103(19), 190601.
Comprehensive Nuclear Mater
58. Jang, S.; Voth, G. A. J. Chem. Phys. 1999, 111(6),2357–2370.
59. Miller, W. H. J. Phys. Chem. A 2001, 105(13),2942–2955.
60. Poulsen, J. A.; Nyman, G.; Rossky, P. J. Proc. Natl. Acad.Sci. USA 2005, 102(19), 6709–6714.
61. Zhu, T.; Li, J.; Samanta, A.; Leach, A.; Gall, K. Phys. Rev.Lett. 2008, 100(2), 025502–025506.
62. Voter, A. F. Phys. Rev. Lett. 1997, 78(20), 3908–3911.63. Voter, A. F.; Montalenti, F.; Germann, T. C. Annu. Rev.
Mater. Res. 2002, 32, 321–346.64. Laio, A.; Parrinello, M. Proc. Natl. Acad. Sci. USA 2002,
99(20), 12562–12566.65. Miron, R. A.; Fichthorn, K. A. J. Chem. Phys. 2003,
119(12), 6210–6216.66. Hara, S.; Li, J. Phys. Rev. B 2010, 82(18),
184114–184121.67. Segre, E. G. Phys. Today 1989, 42(7), 38–43.
ials (2012), vol. 1, pp. 249-265