Theorem of movement - m Relativity · Theorem of movement ... formulation of one general theorem...
48
Theorem of movement by Victor Félix de Botton Abstract The theorem is not a "theory" and is mathematically developed to fully resolve the problem of all movement and all the misunderstandings, unknowns and disparities between previously assumed "theories" about movement, departing from accessible mathematic considerations, not relying on any assumption or measured or "calculated" dimensional coefficient or constant as no constants whatsoever are included in the theorem and lemmas developed, unifying all movement into a unique description, systematically discarding all previously dedicated descriptions, assumptions, laws, coefficients and constants, leaving no isolated movement in universal space, scale or time, using an existing purely mathematic equation and multidisciplinary mathematic demonstrations, enabling application of the theorem to calculate all and every existing observation or phenomenon requiring only geometric measurements of distances, angles and time for all calculations and previsions. N.B. All written and graphic original material herewith is the property of Victor Félix de Botton and cannot without his written authorisation be reproduced, reprinted or used to obtain any patent for inventions based on or relating to the contained original ideas and developments including theorem, lemmas, formulae and appendices in every and all countries. April 28,2006. Victor Félix de Botton - Kaplan Place 12 , Beersheva 84288 Israel phone 972-86273890 - [email protected] ISDN 965-555-116-4 1
Transcript of Theorem of movement - m Relativity · Theorem of movement ... formulation of one general theorem...

Theorem of movementby Victor Félix de Botton
Abstract
The theorem is not a "theory" and is mathematically developedto fully resolve the problem of all movement and all themisunderstandings, unknowns and disparities betweenpreviously assumed "theories" about movement, departing fromaccessible mathematic considerations, not relying on anyassumption or measured or "calculated" dimensional coefficientor constant as no constants whatsoever are included in thetheorem and lemmas developed, unifying all movement into aunique description, systematically discarding all previouslydedicated descriptions, assumptions, laws, coefficients andconstants, leaving no isolated movement in universal space,scale or time, using an existing purely mathematic equation andmultidisciplinary mathematic demonstrations, enablingapplication of the theorem to calculate all and every existingobservation or phenomenon requiring only geometricmeasurements of distances, angles and time for all calculationsand previsions.
N.B. All written and graphic original material herewith is theproperty of Victor Félix de Botton and cannot without his writtenauthorisation be reproduced, reprinted or used to obtain anypatent for inventions based on or relating to the containedoriginal ideas and developments including theorem, lemmas,formulae and appendices in every and all countries. April 28,2006.
Victor Félix de Botton - Kaplan Place 12 , Beersheva 84288 Israelphone 972-86273890 - [email protected]
ISDN 965-555-116-4
1

Table of content
p. Subject
4 Summary6 Introduction7 The theorem8 General considerations
MovementDimensionsMathematic representationRelativity - Observer
9 The soveon set10 Universal complement set12 Time
Alternatives for simultaneity assessment in time
Continuous infinitesimal time increments simultaneityassessmentPeriodic finite time increments simultaneity assessment
13 Time a dependent variableAssessment moment
14 Implementation sequenceSpace and velocity
15 RangeSubsets
16 Presence and rangePresence
17 Memory creation18 Availability of soveon subset memory
Propagation range at higher presencePopulation
19 Temperature and statistical mechanics19 The equation21 Accelerations
Operational sequence of the equation
2
22 Lemma 1 Evaluation of illustrative space contractionsInfluence in the spherical range of an elementary soveon
23 Influence in the range involving a subset with two soveons26 Subsets formation29 Behaviour of soveons in different spatial densities of
population.Lemma 2 Superposition of a mathematical flow pattern
Doublet31 Transposition of streamlines into a circular acceleration 34 Lemma 3 Third dimension rotation of a doublets sphere35 Mathematics are appropriate to express movement. Conclusion37 Appendix 1 Numerical applications of the theorem of movement44 Appendix 2 Immediate research45 Appendix 3 Immediate developments - Previsions - Patent
association46 References
3
Summary
The theorem discards assumptions, laws, principles and other intuitiveand a posteriori behaviour descriptions for selected populations of movingentities.
The theorem demonstrates a priori logic and mathematic constraintsneeded to define movement as intrinsically and essentially universal,impossible to isolate in location or in time, simultaneous, relative andreciprocal to any other movement or formal observer, which for this sakemust be endowed with movement features, all to constitute a set, the heredefined "soveon set" with elements and subsets featured with linear andangular velocities and assessment of simultaneity in a time scalemeasured in full periods of the elements of the set, accelerating and beingaccelerated by simultaneous elements or subsets in the range at everyend of period, the rest of the universe of movement, where entities orlocations devoid of movement features are meaningless to any theoremon movement, being the ultimate complement set for each and everyoneof them.Equation (1) in vector form
a' = a + Ω x r + 2ω x v + ω x (ω x r)
is unique to describe movement accelerations exerted by or on anyelement or subset.
Soveons apply irreversible accelerations according to equation (1) at eachend of period, on all simultaneous soveons located in a range sphere ofradius one present wavelength, where all accelerations superpose and aresatisfied, the sphere centred at the extremity of the forthcomingwavelength according to the present linear velocity.The accelerations template can be but is not necessarily assimilated formathematical description, to a temporary contraction of space of the rangeat simultaneity, involving the said simultaneously assessing soveons.
The capacity of simultaneous assessment per unit time of a soveon or asubset is its presence, the combination of the simultaneity assessmentsfeatures or otherwise put, the independent frequencies of its elementsoveons and their independent common first harmonics as extra newfrequencies who form AND gates witnessing the assembly of any two
4

formerly independent frequencies, the gates becoming memory registersfor recognition, comparison and imitation to other subsets in the range.For reminder, any information as light, sound, heat etc..., is transmitted,recognised and displayed by frequencies.The AND gates are similar to Morse message letters transmitted andcollected by any soveon subset in the range.The population of a subset is the number of its derivable subsets down toits elements.
Doublet flowing patterns generated by equal and opposite soveons inplanes and the planes rotated around the sink-source axis of the doubletssuperpose and exert a centre-spherical acceleration with an overallrotation in the third dimension around the sink source axis that producesalso satellite and ring acceleration.
All basic essential phenomena are all mathematically described inappendices by applying the theorem totally free of assumptions orarbitrary or dimensional or otherwise constant or coefficient.
Movement is appropriately described by humanly created mathematicalequations, mathematics being based on the same soveon memoryregister gates created within human anatomy and physiology in physicaland chemical soveon subsets for comparison criteria all belonging to thesame soveon universal set.
5

Introduction
The theorem supplies a fundamental tool to describe and calculate allphenomena using one unique geometric theorem measuring distances,angles and time only, with no need of any assumptions. Movement or "motion" in Newton's words(1), has been defined andexpressed in various ways by classical dynamics(1)(2)(3), special and generalrelativity(2)(4), wave mechanics(5)(6), formalism of wave particles(5), quantummechanics(5)(6)(7), statistical mechanics(8) and others, each with a set ofassumptions like for example the general gravity mass law(1)(5). theconstancy of light velocity(4)(9)(10), the linearity of movement/time links(6),Pauli's principle(8), and together with a set of coefficients or constants, likefor instance the general gravity constant measured and checkedagain(11)(12) and again to this day but still using the same mass lawassumption, Planck's constant(6), etc.., , each and every one dedicated toa restrained population of behaviours. events or observations segregatedand isolated in space or time like small or large objects or distances....The mere multiplication of interpretations of movement stresses perfectlythe disarray. Nonetheless all of the interpretations entered freely thescientific lexicon not always accentuating the fundamental assumptions,finally reaching a very stable dead end situation for over a century with notrue or even foreseeable conciliation.Movement analysis based strictly and uniquely on mathematical criteriaand constraints, making use of several disciplines(14)(15)(16), permitsformulation of one general theorem unifying description under a singlevectorial equation(2)(3) developed from Galilean transformations a centuryago, derived in time from a geometric displacement in a rotatingcoordinate system. The equation supplies at once solutions to allaccelerations formerly discovered individually. Applications of the equationand the theorem give calculated results to all observed or observableevents and behaviours(7)(17)(18)(19) with no assumptions, no dimensionalcoefficients or constants, using units of distances, angles, pure numbers,and time also unified.Every time a mathematical or logic deductions replaces assumptions it willbe specifically outlined in the demonstration and the developments.
6
The theorem
Movement constitutes a set defined by intrinsic relativity, reciprocity andsimultaneity of translation and rotation of all moving entities, the soveonset.
Relativity and simultaneity allow no isolated soveon in time or location.Soveons, elements and subsets, have angular and linear velocities andsimultaneity assessment capacity to all relevant simultaneous soveonsand ultimately to the rest of the universe for it to be to each thesimultaneous complement subset.
Any mathematic description of movement by an equation implies openloop immediate implementation of the accelerations required by theequation on each soveon, one soveon period a priori in a one wavelengthradius spherical range centred one wavelength in front of the presentposition in direction of the present linear velocity.
Subsets comprise all the ranges, frequencies and harmonic frequencies ofeach independent pair of their elements and subsets and all combinationsbetween them.
The presence of a soveon subset is the combination of all the frequenciesof assessment of its subsets and the obtained first independent harmonicfrequencies from every two basic frequencies that constitute memoryregisters, logic AND gates to permit immediate recognition andcomparison and further assessment capacity.The population of a soveon subset is the combination of its derivablesubsets.
Equation a' = a + Ω x r + 2 ω x v + ω x (ω x r) (1)
is unique to describe movement.Mathematics based on AND memory gates included in the presencedefinition are part of the set and appropriate to describe the soveonmovement set as a whole.
7

General considerations
MovementMovement intuitively and formally is a change in time of a relativegeometric status between definable entities here called soveons.Undefined or undefinable entities or undefined or undefinable changes intheir relative geometric status in time are insignificant and irrelevant to atheorem intended to describe changes in geometric status of movingentities in time via some set of mathematical equations.
DimensionsDimensions involved in mathematic representation of movement areangles, distances, and changes in time of the distances and the angles.Devoid of time, geometric changes reduce to formal transformations.No other mathematic dimension is definable for movement description.Angles imply three point bundles in any space definition to be associatedwith any moving entity. One point entities possessing no measurableangle directions, cannot mathematically represent movement.Basic dimensions being distances, angles and time, the time dependentdimensions will be the linear and angular velocities and accelerations.
Mathematic representationMathematic representation implies a functional link between a givenrelative geometric and kinetic status and the required changes to beimplemented simultaneously, starting from the present status with norecordings required.A mathematical time definition and measurement for simultaneity will beanalysed separately.
Relativity - ObserverAbsolute coordinates are undefinable at any observer level, there can beno right or wrong observer(17) for despite the said in the reference bothGalileo and the Establishment were right, any observer must be entirelysatisfied from his point of view and any mathematically defined status of amoving entity must be entirely satisfied and therefore geometric status andvelocities and accelerations must be essentially relative and reciprocal.The mathematic expression must be expressed the same for any movingentity wherever its location and whatever relative velocities andaccelerations, they must remain invariant.For any two moving entities, a change of status of one of them must
8

simultaneously bring about a change of status to the second and mutualinfluences are compulsory to maintain the relativity and the reciprocity.There can be no moving entity devoid of influencing accelerations on othermoving entities and that implies that influence between any two movingentities cannot and must not be a priori attributed to any one of the twoand definable influences must superpose and all must be taken intoaccount and each be satisfied separately and entirely.The above defines the set of moving entities, the soveon set.Entities that cannot display soveon features cannot affect soveons.Any observer of soveons must possess soveon features to be able toassess movement through the said movement influence(7).Relative and reciprocal simultaneous influence eliminates the possibility ofstoring movement. Quasi-static, equilibrium, isolated and similar notionscannot be quoted together with movement analysis. The same putssimultaneity as the paramount condition to maintain relativity andreciprocity. Additional proof of this statement will be confirmed within thetime definition,The influence expresses the instant transformation of any movement toanother movement and eliminates notions of useful or non-usefulmovement like work or the ad hoc and per se "horse powering"requirements from engineers in the eighteenth century, further followed bythe nineteenth century "energy" concept and with it all the followingconservation laws even at corpuscular levels as if each corpuscle had topump water from mine wells.The present relativity and reciprocity specification for movement isabsolutely universal and discards any constant linked to it.
The soveon setSoveons constitute a set of entities possessing relative and reciprocalposition, velocities and accelerations angular and linear towards any otherrelevant soveon in space. Each having reciprocal velocities andaccelerations, both linear and angular, to all other soveons in space, theultimate complement subset to any soveon is then by definition the rest ofthe soveon universe as it contains all reciprocal velocities andaccelerations to the said soveon. There can remain no isolated soveons.
9
Universal complement setThe link of a soveon to its universal complement subset is depicted in aVenn-Euler diagram in figure 1.Any soveon in the universe requires by relativity and reciprocity the rest ofthe universe to be its reciprocal relative movement thus its complementsubset. At any situation change a soveon makes a renewal link to itsuniversal complement subset. For any soveon there has been a formeropposite movement, angular and linear velocities and accelerationsabsorbed by the universe, hence the necessary and sufficientsimultaneous link to the universe.To an angular velocity ω and a linear velocity v of a soveon relative to therest of the universe there are at the same time the relative and reciprocalvelocities angular - ω and linear - v of the rest of the universe towards thesoveon.It can be seen that a soveon acquires any starting conditions by leaningon the universe producing an anti soveon opposite and reciprocal, all to beperformed with the universe as basic soveon observer of the soveonactivity. All other simultaneous soveons present in the range will beinfluenced by the soveon requirements and will influence it back in thesame way.An illustrative example would be an internal combustion engine mountedon a ship, first started against the ship hull and the sea or otherwise statedthe rest of the universe and then coupled to a propeller which propels it byleaning also on the universe against the navigation direction. At each plugignition of the engine the leaning on the universe is renewed exactly asany soveon appears at full period to the universal complement set. Thedirection and velocity of the ship can be modified by the captain using arudder or a helm and an accelerator but each change will be accompaniedby a reciprocal change of the universe.There are no small soveons and large soveons or negligible soveons asthey all lean on the universe.
10

Complementsubset
Figure 1 - Venn-Euler diagram Soveon and complement Universal set
Reciprocity of angular and linear velocities
V
ωω
Vu
u
s
sSoveon
Universe
Figure 1 Venn-Euler diagram of the universe of movement
Reciprocal influence between soveons can be assimilated for easymathematic representation to a cumulative template deformation of spacein the ultimate complement set to all simultaneous soveons thus ensuringautomatic superposition.These simulated space strains will transport all soveons in simultaneousrange to homothetic pre-dictated positions according to the accelerationsexerted by each soveon at any next time increment.Simultaneous soveons in range will be transported and of course theinfluencing soveon itself will be transported to its next position respondingaltogether to deformations dictated by all the superposed templates ofsimultaneous soveons in the range including its own.The cumulative strain of space allows any partial collection of subsets atrange to observe internal reciprocal influences as if within a cell, the cellitself strained by farther external subsets but within the same cell therelative positions and influences must remain true between them.
11

TimeSimultaneity assessment for reciprocal influence using a mathematicalrelation is required to update relative parameters for further influence.Movement being a change of geometric status in time, time must supply acommon basis to determine simultaneity and assess mutual relative statusfor accelerations, time must be common to all soveons and the universalcomplement set to be partner to each and every one as none can beisolated. Time is adjoined to assess simultaneity for implementation of themathematic template. It is to be noted that in the absence of movement time is undefinable andvice versa.
Alternatives for simultaneity assessment in time (21)
The alternatives that stand for analysis can be a continuous assessment,making use of infinitely small infinitesimal time increments or, periodicfinite assessment time increments.
a - Continuous infinitesimal time increments simultaneity assessmentContinuity is obtained by the assembly of an infinite number of infinitelysmall increments in a defined interval and implies universal updating ofstatus to all simultaneous soveons in space and activation of accelerationsafter the said time interval. Geometric and time increments for any soveonmust together be infinitesimal.Time infinitesimals have by definition to tend to zero but never attain it forthe time dimension to exist altogether. Whatever small the infinitesimalchosen it can still be large enough for some soveon to remains "unseen"or uninfluenced as there can and must be no defined high or lownumerical boundary in the form of a coefficient or a constant, to distances,angles, velocities, accelerations or frequencies.The continuous alternative cannot supply a universally definite and reliablesolution for simultaneity assessment.
b - Periodic finite time increments simultaneity assessmentA soveon possessing a definable definite period will use one full period asits time increment for simultaneity assessment, parts of periods bringingback the infinitesimal indefiniteness.Alternative "b" insures that any two soveons having different periods willindeed assess if they are in the range even after a long time, as againstalternative "a" by which assessment is in the hands of "destiny", a totallyunacceptable option for any ordered system or closer, any system
12

designer..For a subset containing many soveons moving together so as to producean overall subset period, each of the partner soveons will at its own end ofperiod represent the subset as if it was the subset itself with the subsetoverall period, for as said beforehand there can be no unsatisfiedinfluence by relativity and reciprocity.The periodic alternative is universally acceptable as it deals with finitedefinable values, leaving no soveon in an undetermined situation and theuniversal complement set to any soveon element or subset alsoreassessing it at the soveon's end of period.
N.B. The periodic "quantic" alternative is the result of actual operationalconstraints to supply a reliable no failure system of assessment fordefiniteness and is the only "quantic" requirement to fulfil all necessaryunderstanding of all the observations. No assumption(6) was needed butplain mathematic analysis in the way to decide on a scan rate to be sureto detect all including very short events.
Time a dependent variableThe periodic time assessment alternative excludes the option to definetime as an "independent" parameter.Time will be counted and measured as the number of actual rotations ofdefinable soveons very much like actual time measurements.The dependence of time on movement makes time irreversible at anysoveon level each being dependent on the simultaneous universalcomplement set. Reversal of time at any situation is undefinable as thereis no definable central subset to relate to with other subsets time scales.The periodic requirement makes movement of soveons immediatelytransformable, exchangeable but not storable and not given to any linearalgebra or conservative solution for movement representation.
Assessment momentThe time increment being one period, time measurements will be integralnumbers of periods and simultaneity will be assessed at time intervals thatare equal multiples of the different periods of assessing soveons. Just asthe time infinitesimal had to be finite to be definite, the assessment timemust be absolute zero, also a finite quantity, to remain definite and notinterfere with any period of some faster soveon. The assessment will takeplace exactly at the count of the said common multiple at exactly the endof period of any elementary soveon in any subset.
13
Soveons possessing equal periods will assess only if they aresimultaneous or if they belong to subsets that can assess at their phaseangle through the periods of other soveons they contain.Simultaneity is the time extension of relativity for distances and angles, i.e.all simultaneous soveons start their mutual relative and inherentlyreciprocal movement together. Each soveon will execute the changesrequired by the assessment till the next assessment but it will not bedetectable in between so it could have been once assumed(6) that thechange is abrupt but it must not be, it is only "unnoticed" within any partialperiod time. It could also have been assumed(6) that "energy" had to beinvested to produce the changes in position and velocities but no "energy"has to be invested or obtained, each soveon executing the exactrequirements of the a priori link dictated from mathematical argumentsabout the destiny of the system from starting conditions. Soveons notpresently simultaneous will not participate in assessment and will not beinfluenced by the superposed influence of presently simultaneoussoveons.For the record, simultaneity is elsewhere called coherence and invoked aposteriori without actually analysing operational constraints.
Implementation sequenceThe time increment being one full period and assessment time being zero,implementation must be such that at the end of the next period all thechanges required by whatsoever implemented mathematical relations ofdisplacements, velocities and accelerations, linear and angular arecompleted within the exactly elapsed one period with the exact timeinterval of one period used for the time elapse of operation in themathematical link.
Space and velocityOne consequence of the periodic time scale and sequence alternative isthat for a given soveon the unit distance is one wavelength at the presentvelocity, the soveon therefore "appears" to any formal simultaneousobserver at wavelength intervals only. By the same argument it will alwayspresent the same angle of rotation at "appearance".For a soveon to "appear" to an observer implies the soveon to influencethe soveon observer and vice-versa and neither the said soveon nor theobserver are quite the same as before the appearance, some of theirparameters may have changed. A highly populated subset with similarelements and a largely populated observer can retain most of their
14
characteristics, a single element soveon, observed or observer, willchange altogether.
RangeAt the end of any period the only known parameters for a soveon are thepresent linear and angular velocities and therefore the only way to definethe forthcoming range is within the context of the two. The predictablecentre of the forthcoming event is one wavelength away as the unit timeincrement of a soveon is one period. The predictable range of influencealso can be no more than, but at least, one whole wavelength, the productof its present velocity by its present period and for an element in a subsetthe product of its velocity by any of the periods of the subset, i.e. a sphereof radius one wavelength, for any further influence must and will beaffected by the present one wavelength irreversible implementation andwill become invalid at the next simultaneous assessment. Soveons cannotdesign their future for more than one period and one wavelength as at theend of the said period influence is already implemented and has produceda new status for the next period, and this is valid for elementary photonsas well as for very populous subsets like supernovae or galaxies. Animmediate conclusion is that devoid of linear velocity a soveon has norange of influence and is thus unnoticeable. Movement is dependentaltogether on rotation for time definition and on linear velocity for rangelocation and volume. No movement is observable that is not equipped withboth linear and angular velocities. The range and volume of influence isdictated by purely logical and in the field constraints with no assumptions.
SubsetsIn case a subset contains many elements or subsets in similar situationbut having different timing schedules, the external subset influence mayseem conservative (reversible) as each of its elements "has paved theway" to another element with the next timing schedule for influence, andinfluence may seem the result of, instead of the reason to, the subsetsbehaviour observed by a slower observer.Subsets contain elements and subsets and display all their features,velocities, accelerations and assessment schedules, and possess theirown overall linear and angular velocities and time assessment schedulesand all are to be considered for assessment. Any combination must besatisfied and any solution to any combination is valid for furtherimplementation. This allows research within partial links each true andactive.
15

Presence and range
PresenceSoveons in a subset behave in an assessing schedule comprising all theassessing schedules of all its components be they elements or subsetsand the schedule of the overall subset. Each component having a specificfrequency and a phase angle the subset will display new overall assessingproperties.In the timetable on figure 2 for example soveon A appears three times asecond, frequency 3, soveon B appears seven times a second, frequency7, a subset C containing soveons A and B will appear, but only for shortintervals of time, 21 times a second, frequency 21 or the first commonharmonic of the two former frequencies.From two original frequencies a new frequency or otherwise a new periodhas been created and although it will not manifest itself continuously thenew angular velocity has been created for as long as the two soveonsremain within range the harmonic will manifest itself. A soveon with higherfrequency can be treated as the common harmonic of the second soveonand another soveon with a lower frequency. The common harmonic stringof two other strings of a musical instrument will vibrate spontaneouslywhen both strings are activated simultaneously.
1 second 1 second
A = 3/s A A A A A
B=7/s B B B B B B B B B B B B B
C C C CFrequency C = A+B or AxB = 21/second has been created
Figure 2 Timetable of a subset of two soveons
A subset having P independent frequencies or simultaneity schedules willhave P!(Pi.Pj)!(14) derivable frequencies, where Pi.Pj expresses the numberof independent harmonics obtained by each basic frequency pair.
Pij = P ! (Pi.Pj) ! (2)
This "presence" feature expresses very well the new assessing and
16

recognising power of the subset as it gives the number of assessmentcombinations per unit time of the subset.
Memory creationActually memory has been created by the coupling of two basicfrequencies.The new frequency is witness to the event that the two soveon subsetshave met and assembled and this is true whatever the subsets complexity.The creation is an AND logic gate.
A + B = C or A x B = C closer to the arithmetic truth
Any further independent addition to the subset will increase its presenceand the memory of the new subset. Memory, not a virtual soveon, has been created, as from every twofrequencies a third has been remembered as long as the soveons remainin range while originally there were only two frequencies.The new frequency can be the basis for a new coupling between the newsubset, the first and second soveons assembly, with an adequate lowerfrequency soveon in the range to complete the higher harmonic frequencyand thus create a new subset . The new subset comprising the secondand third subsets is the copy of the first subset.
A + B = CC + D(A - B) = A + B + A - B = 2A
Soveon subsets possess memory.The memory outward display is executed as follows:assessment or contact - very definite time delay - assessment or contactThere can be no mistake with the exact time delay for recognition, just likeMorse radio communication with a very qualified (the universalcomplement subset} operator.This information transmission process leaves no place for mistakes, andpermits multiplexing using combinations of time delays.The independent first harmonic supplies a very selective system forrecognition and it can also permit associative recognition in the form
A + B = E + F which is an associative alternative permitting furtherexpansion of the memory registers
As can be seen the logic of the frequency information transmission isversatile and resembles very much actual human made logic networks
17

which of course are the result on the inherent human logic based on thesame actual memory AND gates.N.B. The AND gates are specifically linked to the subset and are notrepresented in the universal complement set as there are no velocitiesattached to them. They are recognition frequencies to increase presence.
Availability of soveon subset memoryConsecutive encounters at the same frequency period of subsetspossessing the frequency in their memory are to be dealt exactly as thedigestive system of the dog in Pavlov's experiment.The dog recognised food by sight and at food sight the overall systemproduced stomach secretions and when Pavlov coupled the bell ring to thesight the memory system would use the bell ring to produce secretions. Aset of accelerations of soveons in the digestive system was switched onby the secondary frequency of the bell ring.
Propagation range at higher presenceThe range of a subset increases with its presence as it becomes broaderbeing the longest wavelength which must be satisfied, the product of thelongest period by the highest linear velocity of all the elements.
PopulationTwo elementary soveons involved in a subset define two as the populationof the subset. The population of a subset of N soveons will be the numberof derivable subsets:The population is then expressed as
Pn = N! (3).
Subsets can contain a very large population but when many subsets orelements have dependent angular velocity (frequency) like crystals, allhaving the same composition and order the subset has then a limitedpresence as most angular velocities are equal and have a uniquedependent outward presence. A molecule of protein(20) having a populationof only hundreds but a very large variety of independent angular velocitiesin every chemical radical, will have a much extended presence andmemory as it is composed of all the particular angular velocities, mostlyindependent together with all the harmonics obtainable from them. Thesame molecule immersed in a solution containing basic radicalcomponents could then make use of its memory to reproduce itself or
18

some of its components as described in the memory creation paragraph.
Temperature and statistical mechanicsStatistical mechanics(8) conclusions remain accessible using equations (2)and (3) where they contain actually definable presence and population,with no need of assumed principles(8), and with no undefinable "energy"states, actually taken there as the number of "particles" combination, thepopulation, and emitting assumptions as for its diversity.N.B. The exclusion principle(8) is replaced by a logic requirement forindependent frequency existence.A population increase accompanied by a presence increase will produce aspecific presence increase with both increased range and velocitiesavailable for interaction with other subsets.Lower velocities will produce conduction velocity emissions at short rangeand higher velocity emissions will produce radiation to a farther range.A population increase with no presence increase as crystal growth will notproduce a specific presence increase.
The equationAt this point it has to be stressed that no assumption was emitted and allthe considerations were intrinsically mathematic, logic and logistic andtherefore a purely mathematic expression can and must be used todescribe movement.
Equation(2)
a' = a + Ω x r + 2 ω x v + ω x (ω x r) (1)
was taken from the reference text book in which the full but very shortdemonstration is carried out.The equation expressing accelerations exerted on and by any soveon,was derived by applying twice a time derivative using ideal mathematicinfinitesimals on a geometric linear displacement in a rotating coordinatessystem i.e. intrinsic relative translation and rotation twice in timeinfinitesimals.The equation is in Cartesian vector form but all the conclusions areindependent of the form as should invariant accelerations be.Coupled with the universal complement set space illustrative straining inthe range the equation is immediately adaptable and clearly estimated.
N.B. The position and velocities angular and linear being intrinsically
19
relative and reciprocal there is no need to state expressively the identity ofthe soveon/soveons involved.
The terms of the equation:r : position vector between simultaneous soveons in the range.ω : relative angular velocity.v : relative linear velocity. a’ : total relative linear acceleration.a : relative linear self acceleration of a soveon subset by any innerprocess such as rocket or other.Ω : relative angular acceleration to the universal complement subsetexpressing changes of direction of the angular velocity ω as a result of thechange of geometric status.ω x (ω x r) : centripetal acceleration to accelerate simultaneous soveons inthe range perpendicularly towards the axis of the relative angular velocitywith value ω2 r sinφ where φ is the angle between the position vector ofthe simultaneous soveon and the angular velocity.Ω x r : linear acceleration resulting from the vector product of the angularacceleration, the change of direction of the angular velocity, with theposition vector.2 ω x v : "de Coriolis" acceleration exerted between the soveons whichcan be intrinsically and uniquely linked with one of them as independent ofany particular simultaneous soveon or any particular position in space, it isnever negative, null only when the angular and linear velocities are coaxiallike with a photon having null "mass".
All the terms of the equation are all well within the requirements of thesoveon set.From the generality of the equation any simultaneous soveons in spaceexcept the defined soveon are also to obey the equation. The equation isinherently at least three dimensional and points not comprising angle ofrotation data are excluded. No less than three dimension version of theequation is acceptable as it deals with vector products.An equation like G m1 m2 / r2 = m2 ω2 r is inherently inapplicable to amovement theorem as ω is three dimensional.
20
AccelerationsAccelerations are the result of starting conditions, relative positions andvelocities assessed simultaneously. The equation mathematically derivedexpresses exactly and solely all alternative accelerations and excludesany otherwise assumed accelerations from presumed different sources ordifferent mathematical or mechanical relations, as they would contradict orimpede the present solution obtained by strict mathematic demonstration.All existing soveons result from former soveons. Accelerations beingadditive the process is collective and superposes.
Operational sequence of the equationAccelerations between soveons involving resultant angular and linearvelocities will be implemented for an a priori "in front" decision foracceleration.At the end of any period of a subset all known centripetal accelerationsmust be satisfied in the known range as formulated in the equation.Satisfaction of the equation will dictate the changes for the remainingaccelerations during the time interval of one period.If a simultaneous soveon in the range has a higher angular velocity andthus a larger centripetal acceleration the present soveon will beaccelerated towards it accordingly.The linear velocity vector will be diverted according to the centripetalacceleration and will produce a velocity change that will produce a deCoriolis acceleration.The change of position of the soveon will also divert ω the angular velocityand thus produce an angular acceleration which at a distance will producea new linear acceleration.
21

Lemma 1 Evaluation of illustrative space contractionsN.B. The space contraction notion is developed for mathematical
description only.
A soveon will at simultaneity influence simultaneous soveons in the rangein a fashion that can be assimilated to a contraction of the range space.General formulae for space contraction by a single elementary soveonand by subsets of two or more elementary soveons are developed.
Influence in the spherical range of an elementary soveonThe range being a sphere of radius one wavelength, interaction with othersoveons can divert a subset relative velocity vector. In case of noassessment at the present period the former velocity direction and extentwill be used for the next range.The acceleration ω2 r sinφ affects a sphere range r = λ as in figure 3.The centripetal acceleration is directed at right angle towards the angularvelocity with value ω2r sinφ where φ is the angle between the radiusvector and the angular velocity.All relevant soveons will be attracted in homothetic ratios to the radiuspattern similar to a space contraction.The acquired velocity of any soveon under the present influence at time twill be
v = - ω2 r sin φ t , the distance walked by an attracted soveon during this period will be
dr = v dt = - ω2 r sin φ t dt dr /r = - ω2 sin φ t dt , integrating for all r ≠ 0 and replacing r = ro for t = 0ln r /ro = - ω2 sin φ t2 /2 at t = T = 2 π /ω , ln r /ro = - 2 π2 sin φ , r = ro exp( - 2π2) sin φ ,r/ro = (2.6753 x 10-9) sin φ
a definitely not null quantity and similar for any elementary angularvelocity.The range sphere has contracted to an ellipsoid of revolution according tothe template.A point in line with the angular velocity will not be accelerated orcontracted. A point at right angle with the angular velocity will becontracted most.The acquired velocity has become
v = dr/dt = - ω2 r sin φ t vT = - 2 π ω ro exp( - 2π2) sin φ2
on the range sphere ro = λ = v0T = 2 π v0 / ω then
22

vT/ v0 = - 4 π 2 exp( - 2π2) sin φ2 = - 1.0562 x 10-7 sin φ2 perpendicular to ω
The reference soveon can be the soveon itself as it is located on therange sphere. The acceleration then induces an acquired linear velocityperpendicular to the angular velocity and it is added in vector summationto the original linear velocity. In case the original linear velocity and theangular velocity were in line the original linear velocity is fully conserved,in case the original linear velocity and the angular velocity were at anangle the acquired linear velocity is deduced vector fashion from theoriginal linear velocity. The process rotates both the linear and angularvelocities and decreases the angle between them by reducing the linearvelocity. The process tends to put angular and linear velocity in line.
Range sphere
Sovon after simultaneous end of period
Figure 3 Centripetal accelerations range
Influence in the range involving a subset with two soveonsand their angular velocities.
In figure 4 a soveon ω2 revolves at distance d from a central soveon ω1
with linear velocity around its core v = ω1d its angular velocity ω2 coaxial with v .
23

4 π ω / ω )
r0
Angular velocity
r = r exp( -
ω
ω2
1
λ = 2 π ν / ω12
Range
Arrow away from observer
0 2 1
222
Angular velocity
Figure 4 Contraction of space by two soveons, ω2 revolving around ω1
Range radii to the centripetal acceleration of ω1 can be λ1 = 2 π v /ω1 or λ2 = 2 π v /ω2 , if ω2 > ω1 the farthest range will be λ1 = 2 π v /ω1 and the shortest period will be T2 = 2 π /ω2
Strain of space around ω1 will be at end of period as a consequence of a1 = ω1 x (ω1 x r1) applied to contract space a1 = - ω1
2 r1 sin φ perpendicular to ω1
the acquired velocity v1 = - ω12 r1 sin φ t and the walked path at time t
dr1 = v1 dt = - ω12 r1 sin φ t dt, dividing by r1 for r1 ≠ 0
dr1 /r1 = - ω12 sin φ t dt, and integrating
ln r1 = - π ω12 t2 sin φ/2 + ln r0 ,
rearranging and replacing t by T2 = 2 π /ω2 , ln( r1 /r0) = ( - 2 π2 ω1
2 /ω22 ) sin φ
r1 /r0 = exp ( - 2 π2 ω12 /ω2
2) sin φ < 1 (4) , similar to r1 /r0 = cos α or (r0 - r1) = r0 (1 - cos α)
24
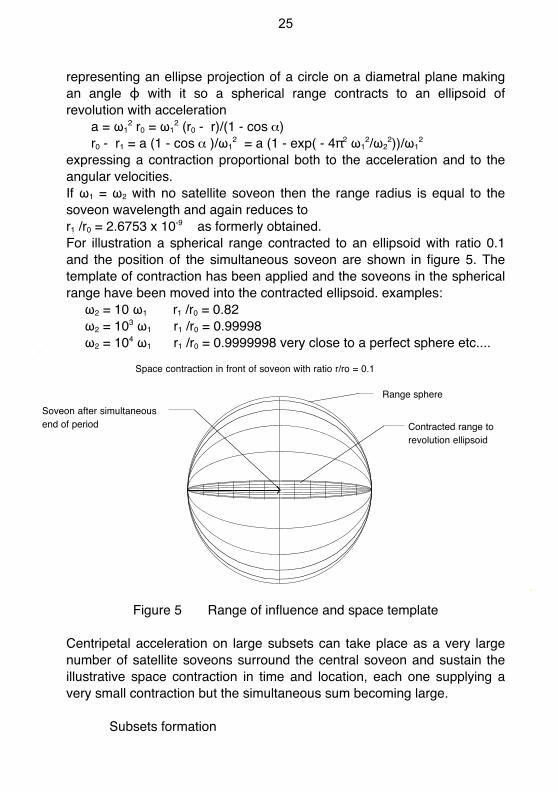
representing an ellipse projection of a circle on a diametral plane makingan angle ϕ with it so a spherical range contracts to an ellipsoid ofrevolution with acceleration
a = ω12 r0 = ω1
2 (r0 - r)/(1 - cos α)r0 - r1 = a (1 - cos α )/ω1
2 = a (1 - exp( - 4π2 ω12/ω2
2))/ω12
expressing a contraction proportional both to the acceleration and to theangular velocities.If ω1 = ω2 with no satellite soveon then the range radius is equal to thesoveon wavelength and again reduces to r1 /r0 = 2.6753 x 10-9 as formerly obtained.For illustration a spherical range contracted to an ellipsoid with ratio 0.1and the position of the simultaneous soveon are shown in figure 5. Thetemplate of contraction has been applied and the soveons in the sphericalrange have been moved into the contracted ellipsoid. examples: ω2 = 10 ω1 r1 /r0 = 0.82 ω2 = 103 ω1 r1 /r0 = 0.99998 ω2 = 104 ω1 r1 /r0 = 0.9999998 very close to a perfect sphere etc....
Space contraction in front of soveon with ratio r/ro = 0.1
Range sphere
Contracted range to revolution ellipsoid
Soveon after simultaneous end of period
Figure 5 Range of influence and space template
Centripetal acceleration on large subsets can take place as a very largenumber of satellite soveons surround the central soveon and sustain theillustrative space contraction in time and location, each one supplying avery small contraction but the simultaneous sum becoming large.
Subsets formation
25

In figure 6 four successive steps have been described for a soveonwrapping itself around a reference soveon kept steady to enable clearerillustration of space contraction.The range of the soveon being one wavelength, the diagram describes thesituations in sequence and the self contraction exerted by a soveon withratio r/r0 = 0.5 for detail.
ac = - ω x (ω x r ) centripetalThe soveon exerts an immediate self acceleration towards the referencesoveon.In the process the angular velocity and the linear velocity are rotated bythe other two accelerations
acor = - 2 ω x v de Coriolis and aω = - Ωs x r result of an angular acceleration
The accelerations acor and aω come out of the plane in opposite directionand neutralise each other. But in fact the soveon has acquired a planetarytrajectory in the plane with effective angular velocity perpendicular to theplane having and absolute value | Ωs | = | 2 ω vs/rs | per period. It can be called ωp and expressed asωp = ΩsTs as T=1 for the soveon and index p for perpendicular and the
radius to which it has retracted can be called rf for final.
Three cases can occur :
a - the radius remains constant the linear orbiting velocity remainsconstant but the relative velocity between the soveons one on a perfectcircle around the second becomes null and the couple becomes a subset. The absolute value of the radius becomes after contraction according tothe centripetal acceleration of the second soveon | rf | = | (2 ω x v)/ Ωp | (5)where Ωp is the change of angular velocity due to the presence of anexisting soveon, Ωp is an angular velocity of the angular velocityperpendicular to it and constant, similar to a photon becoming an electron-proton pair. ω x (ω x r) = 0 and following it 0 = Ωp x r + 2 ω x v is automatically satisfied
26

Steps 0 to 4 wrapparound a reference soveon with influence ratio r/ro = 0.5
0
0 1 2
4
Reference soveon
r
r = 0.5 r
0
1
ωa
b
ω << ω a b
ω
Reference sovon
1
2
3
4
Smoothed trajectory
Space spheres contracted to ellipsoids
3
figure 6 Soveons encountersWrapping around a reference faster soveon, the angular velocity position
in upper drawing and in lower drawing the soveon centre position
b – The radius changes slightly around a constant value, the equationbecomes :
27

- ω x (ω x r) ~ ~ constant = Ω x r + 2 ω x v (6)
which is the illustration of the time derivative of the second law of Kepler.The direction of the new angular velocity Ωp is perpendicular to thesoveon’s original angular velocity with absolute value
| (2 ω v + const.)/r | , r varying between the two half axes of the ellipseand the centripetal acceleration having but small changes from null. Thiscan also be the case of an electron-proton formation starting from aphoton.
c - The soveons exit their common range and part every one on its way like light rays in a slit diffraction experiment. Photons coming close to the slit border interact with its atoms and scatter. Some of the trajectories bend right and others bend left.
In figure 7 the extreme case of a very fast soveon both in angular andlinear velocity passes by another soveon displaces it and abandons it.
0 1
Reference soveon
Entrainmement steps 0 to 4 about a reference soveon with influence ratio r/ro = 0.5
rr = 0.5 r
0
01ω
2 3 4
b
a
ω >> ωa b
ω
Figure 7 Soveons encounter and separation
In all three cases no resultant external acceleration has been exerted onthe complementary subset, the universal complement set of the twosoveons.The sequence supplies three alternative solutions bearing absolutely no
28

uncertainty(6).N.B. The uncertainty assumption is unnecessary to explain observedexperiments.For an outside observer it can be thought that some arbitrary decision wasmade but according to the sequence every soveon will perform exactly thedecision required by initial conditions at every period and even a priori.
Behaviour of soveons in different spatial densities of populationDeriving from the above the population spatial density of a soveon subsetand its frequencies ratio with an incoming soveon will play a decisive roleas to the possibility of simultaneous encounters between them.The population spatial density of a subset expresses the mean distancebetween its elements. The frequencies ratio expresses the range radiiratio between the subset population and the incoming soveon. A relativelyfast incoming soveon having a frequency many orders of magnitudehigher than the subset ranges hence a relatively thin tunnel of influencewill pass through the subset with an encounter opportunity proportional tothe ranges (wavelengths) ratio. A subset formed of closely compressedelements will increase the opportunity.
Lemma 2 Superposition of a mathematical flow pattern and an acceleration patternon a populated subset made of coaxial doublet planes creates anequipotential spherical acceleration pattern devoid of assumptions andcontaining no singular points.The subset must comprise a sufficient population to permit a pseudo-continuous display and must be geometrically arranged so as to conservethe pattern according to its own inner movement.
DoubletAn ideal doublet in fluid dynamics(15) is a source and sink coupled in aplane with a distinctive pattern of circular streamlines orthogonal topotential circles as in figure 8.Two equal parallel and opposite populated soveon subsets having thesame overall angular velocity around their centre attract each other andany other soveon within range and do not require any moment to lean onthe universal complement subset as they lean upon each other. Bringingthe soveons closer together and making them overlap produces an idealdoublet. The direction of rotation of the streams produce a sink and a
29

source on the vertical axis of symmetry.The doublet flow pattern is a purely mathematic development and doesnot rely on any measured constant or coefficient.In figure 9 the original source and sink of the doublet have been slightlyseparated from full overlap to permit detail, the common centripetalresultant of acceleration produced by the pair of soveons is by vectorialsummation equal to twice each soveon's centripetal acceleration on acircular envelope. The sum exerts no external moment as did eachsoveon alone.
Potential linesSink of doublet
Source of doublet
Flow direction
Streamlines
Figure 8 Ideal doublet geometric flow pattern
By superposing to the doublet pattern the circular acceleration obtainedfrom figure 8, the streamlines rearrange into concentric circles around thedoublet.
30

range = v x T
Doublet resultant acceleration - Constant acceleration circles
LegendArrow away from observerArrow towards observer
−ω
ω
r 2
r1
r + r = 2 r1 2
1x r )ωω x (
2ω ω x r )x (
2 ω ωx (
x r )
Figure 9 A circular acceleration pattern from a couple of equal andopposite soveons, a doublet acceleration
Transposition of streamlines into a circular acceleration pattern of adoublet
Figure 10 is the illustration of the rearrangement of the circular orthogonalstreamlines into circular concentric streamlines and a central sink-source.The streamlines finally enter the vertical sink and emerge through thevertical source. The streamlines rearrange along equipotentialacceleration circles in a sink-source direction.
N.B. The following is a flow development of the former paragraph andremains mathematically true for fluid/viscous/solid dust.
31

Range = v x T
a = 2 w x ( w x r )
Figure 10 Rearrangement and transposition of equally accelerated streamlines
Doublets in spherical configurationMultiplication of planes similar to figure 10 around the new sink-source axis of the doublet creates a spherical acceleration volume as in figure 11.The equal acceleration spherical surfaces
a = 2 ω2 r (7)
become equipotential surfaces and rearrange the streamlines in two half circle segments on each side of the doublets. The collected streams flow into a sink along the symmetry axis and emerge at the source.Velocities are equal to the soveon angular velocity multiplied by the radiusto the velocity surface: V = ω r The elements rotating around the central soveons, themselves soveonsenter the sink and exit the source as a flow.
32
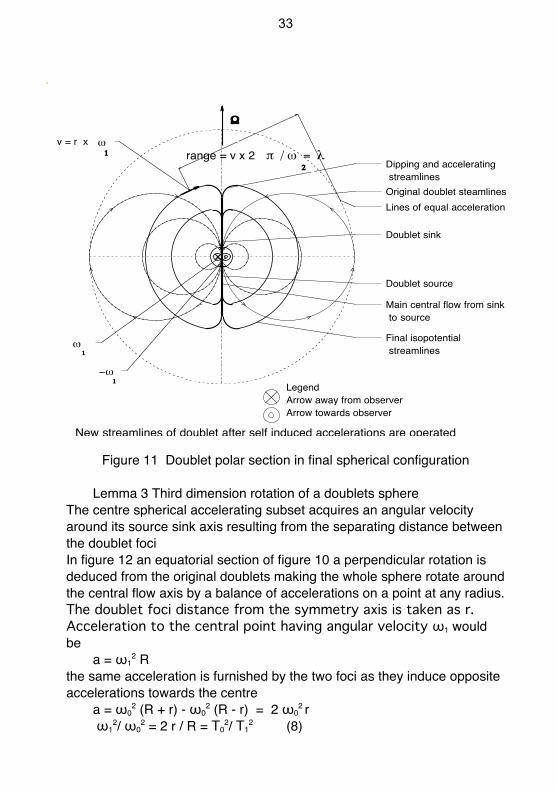
Original doublet steamlinesLines of equal acceleration
Final isopotential streamlines
Dipping and accelerating streamlines
Main central flow from sink to source
Doublet sink
Doublet source
New streamlines of doublet after self induced accelerations are operated
ω
−ω
ω v = r x 1
1
1
range = v x 2 π / ω = λ2
LegendArrow away from observerArrow towards observer
Ω
Figure 11 Doublet polar section in final spherical configuration
Lemma 3 Third dimension rotation of a doublets sphereThe centre spherical accelerating subset acquires an angular velocity around its source sink axis resulting from the separating distance betweenthe doublet fociIn figure 12 an equatorial section of figure 10 a perpendicular rotation is deduced from the original doublets making the whole sphere rotate aroundthe central flow axis by a balance of accelerations on a point at any radius.The doublet foci distance from the symmetry axis is taken as r. Acceleration to the central point having angular velocity ω1 would be
a = ω12 R
the same acceleration is furnished by the two foci as they induce opposite accelerations towards the centre
a = ω02 (R + r) - ω0
2 (R - r) = 2 ω02 r
ω12/ ω0
2 = 2 r / R = T02/ T1
2 (8)
33

When r = 0 there is no perpendicular rotationThe rotation period is dependent on the distance to the core.For R = r , T1 = T0 / sqrt(2) and increasing with R getting smaller than r indicating the core is rotating at an increasing rate which further explains the source/sink character of the doublets configuration.From the measurement of periods and accelerations an apparent viscous coefficient between spherical strata on the subset can be calculated.
Equatorial section showing doublets rotational acceleration around central axis
LegendArrow away from observer Arrow towards observer
ω
ω
c
p a
R
r r
Figure 12 Third dimension rotation of sphere.The newly identified rotation exerts a centripetal cylindric acceleration on its range and the universal complement set and can produce satellite and/or rings movement.
34
Mathematics are appropriate to express movement.
Human thinking is based on memory using words, nouns, adjectives.adverbs, all comparisons of new to previously remembered notions, andverbs for required changes or operations on assessed situations orvalues.Human thinking is operated using newly assessed angular velocities(frequencies) of movement into protein cell radicals to compare andcompute and predict by association to remembered frequencies. Thecommunication process was already observed(20) but not explained in itsinner parameters, human subsets memory uses the frequency protocolbased on frequencies and not on digital contacts, requiring only two inputsand the time elapsed between them for comparison to any otherfrequency. Time being involved, movement is involved.The process of thinking based on time thus on movement, its produce,mathematics are appropriate to formulate definitions and solutions formovement as they are both subsets of the same set.
Conclusion
Mathematical and experimental support for the development of thetheorem on observable movement have been available for a long time.Equation (1) was developed more than a century ago.Diffraction experiments, the best witness to the simultaneous end ofperiod "appearance" where non simultaneous photons are not detected atall on the screen were performed even before. The "uncertainty" wasaccepted as an unexplained default.The coherence notion was invoked but not logistically analysed for it to bea measuring constraint of reliable time.The red shift is here to witness that a soveon linear velocity is dependenton its source and its further encounters. Acceleration of the earth and year length changes following solar or starseruptions are hereby explainable together with stronger acceleration onelevated locations and at the equator in spite of the inverse square law.The unexplained central singular point from the inverse square law has lefteverybody mute and undisturbed.The missing link was procedure analysis and explanation for actual fieldimplementation the same as in any man made process.An implementation procedure was not asked for and thus was notinvestigated, calculations were carried out a posteriori (post-mortem) with
35
some sort of success making use of a lot of "coefficients" and "constants "and accepted as satisfactory enough although the "constants" had to besupervised periodically.No question was asked about how nature could carry out a posterioricalculations and still be in time for simultaneous influences.A detailed specification for implementation of movement was necessary tounderstand a priori reasons and get rid of a posteriori parameters likegravity etc... A catalogue of a few gigabytes is necessary to list on the net all theexisting measured physical constants. Any user of registered andmeasured constants knows the inherent dangers stemming from their use.The present theorem opens the way to much experimental coupled withmathematical research to eliminate all coefficients and replace allempirical equations by purely mathematical solutions to equation (1) andexpand the Mendeleyev table with all the real subatomic particles andtheir combinations that constitute the black galaxies and black holes.Exact a priori specifications for subatomic soveons (particles) can beexpressly formulated to usefully guide the experimental work followingwhat Newton called "the glory of geometry".Communication protocols have to be replaced using nature's sublimeexample.Artificial "downward" acceleration in space voyagers capsules is at handreach.Magnetic use of the underground soveons voyaging at 5.6 km/secondmust be devised to reduce pollution.Rediscovering the solar system and avoidance of such mishaps as Beagle2 by recalculating accelerations on planets.Reviving disconnected neurones communication properties by re-inducingvery high frequency pulses to re-connect.Etc....
36
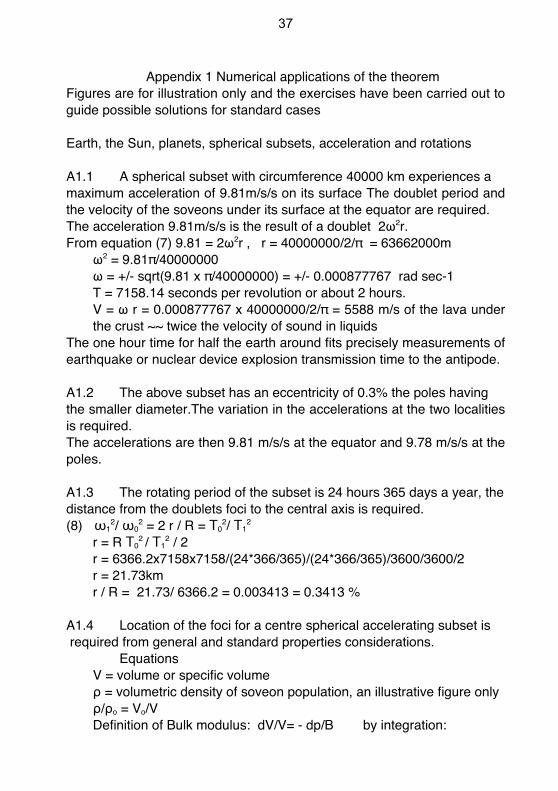
Appendix 1 Numerical applications of the theoremFigures are for illustration only and the exercises have been carried out toguide possible solutions for standard cases
Earth, the Sun, planets, spherical subsets, acceleration and rotations
A1.1 A spherical subset with circumference 40000 km experiences a maximum acceleration of 9.81m/s/s on its surface The doublet period andthe velocity of the soveons under its surface at the equator are required.The acceleration 9.81m/s/s is the result of a doublet 2ω2r.From equation (7) 9.81 = 2ω2r , r = 40000000/2/π = 63662000m
ω2 = 9.81π/40000000ω = +/- sqrt(9.81 x π/40000000) = +/- 0.000877767 rad sec-1T = 7158.14 seconds per revolution or about 2 hours.V = ω r = 0.000877767 x 40000000/2/π = 5588 m/s of the lava underthe crust ~~ twice the velocity of sound in liquids
The one hour time for half the earth around fits precisely measurements ofearthquake or nuclear device explosion transmission time to the antipode.
A1.2 The above subset has an eccentricity of 0.3% the poles having the smaller diameter.The variation in the accelerations at the two localitiesis required.The accelerations are then 9.81 m/s/s at the equator and 9.78 m/s/s at thepoles.
A1.3 The rotating period of the subset is 24 hours 365 days a year, thedistance from the doublets foci to the central axis is required.(8) ω1
2/ ω02 = 2 r / R = T0
2/ T12
r = R T02 / T1
2 / 2 r = 6366.2x7158x7158/(24*366/365)/(24*366/365)/3600/3600/2 r = 21.73km r / R = 21.73/ 6366.2 = 0.003413 = 0.3413 %
A1.4 Location of the foci for a centre spherical accelerating subset is required from general and standard properties considerations.
EquationsV = volume or specific volumeρ = volumetric density of soveon population, an illustrative figure onlyρ/ρo = Vo/VDefinition of Bulk modulus: dV/V= - dp/B by integration:
37

ln V = - p/B + C ; ln(1/ρ) = - p/B + C ; ln(1/ρo) = - po/B + C ; ρ = ρo exp((p - p0)/B) ; ln ( ρ / ρo) = (p - p0)/B
Continuity equation , v = velocity vi+1 ρi+1 = vi ρi
A stream line is a closed loop and must carry the same amount ofsoveons all the way around so that at an equatorial section the balance isnull.The velocity can be taken at first approximation as v = ω r to perform thebalance by summing up once from the outer rim to the centre and oncefrom the centre to the outer rim and finding the equilibrium point.
ω ri+1 ρi+1 = ω ri ρi and in general r ρ = r0 ρ0 or r / r0 = ρ0 / ρ
The density is independent of the bulk modulus and the angular velocity.ln ( r0 / r ) = ln ( ρ / ρ0 ) = (p - p0)/B = ln r0 - ln r p = p0 + B ( ln r0 - ln r )
The pressure is indeed dependent on the bulk modulus.The pressure, density, cross flows and their balance and the cross sectionof the soveons to radiation were computed for the 40000 kmcircumference subset and depicted in figure 13 as function of the radius inthe neighbourhood of the centre.The equilibrium point for the up and down going circular flows, in fact thevortex distance from the centre where the velocity changes direction, wasfound at first approximation at 21.95 km, 0.3448 % of the radius from thecentre very much in accordance with the result of the former paragraph.A second approximation to the under crust radius of 6306 km givesexactly 21.73 km focus distance as in the former paragraph which gives afair evaluation of the crust thickness as 64 km also confirmed in table 1.The true circulating outer radius must be taken into account.A trial run with the sun dimensions gave 24136 km radius for the densecore and the result will be quoted in the next appendix.This confirmation from two different considerations for the location of thefoci permits a general statement that the distance of the vortices from thecentre is at a constant ratio 0.3448 % from the outside circulation radius ofthe subset no matter the bulk coefficient or the compressibility or theangular velocities.
A1.5 Radiation collector In this paragraph regular "energy" calculations were carried out toillustrate within this frame itself some discrepancies. The "heat energy" is
38

in fact the degree of soveons specific presence within and emitting fromand absorbed into subsets.In figure 13. at 15.7 kilometres from the centre of the subset, the density isapproximately 393000 and the factor for radiation absorption (crosssection) is increased for cosmic and very short wave X and gamma raysabout 5300 times down to less than 0.001 pm wavelengths and up to 5 x1022 Hz.
Earth
15.7/ 393
21.7302
0
200
400
0 20 40
radius km
Mbardensity / 1000radius C.G.crossection /1000
Figure 13 Parameters in the neighbourhood of the centre of a spherical accelerating subset.
This 31.4 km diameter sphere constitutes a radiation collector needed tofill in a lack obtained from the heat balance drawn in table 1 and a generalvalue for this supplementary radiation was obtained. The extra heat inputof about 28% invisible radiation (very very high frequencies) has to beadded to the approximate standard average of 0.3 kW m-2 close to visibleradiation measured on the surface to account for the total earth emissionsto space as a black body.
39

The input comes from the sun and cosmic sources in the very smallwavelength radiation, invisible to most of the present day instrumentationwhich are transparent to this "black" radiation. The central dense core ofthe sun emits much shorter wavelength radiation as expected from itsdensity.The heat input is also the convection pump mover for the central source/sink feed of the doublets' vortices. The pump can be reversed as somearchaeologic findings have indicated. An increase in ground cosmicradiation or activity of the sun will change the heat flows and surfacetemperatures and the liquid flows and the periods both of the doubletsincreasing acceleration on the surface and of the third dimension rotationchanging the day period.A 3% simulation increase of this extra radiation as for example at a suncycle/storm or eruption or a stain surface increase would add half aCelsius degree to the sea water temperature. The balance accounts alsofor the temperature gradient in subterranean layers.Fossil fuels heat output taken at 10 billion metric tonnes equivalent in2005 as supplemental total heat supplied (for in the end of any process allthe mechanical output transforms to heat) accounts but for a minor heatsupply about 0.007% of the general balance.All planets and their satellites data can be revised according to the samemodel and all accelerations calculated exactly to avoid mishaps of spacevehicles landings as on Mars 10 or so (till now) crashes.
40

Estimate of radiation heat balance on Earth 20056366.2 km average radius of earth
5.67E-08 J s-1 m-2 K-4 Stephan-Boltzman constant = W m-2 K-4.0.96 emissivity of 80% of water surface
288.16 oK average temperature of ocean water0.375 kW m-2 radiation heat emitted at surface0.300 kW m-2 average visible solar radiation absorbed
0.0753 kW m-2 difference from invisible solar3.84.E+13 kW total invisible difference3.93.E+05 minimum formal density at central core radius figure 135.37.E+03 excess radiation factor at density = d exp(2/3)
1611 kW m-2 average solar invisible extra radiation absorbed2.38.E+10 m2 absorbing surface required
16 km radius of required collector15.7 km actual radial point of minimum density 3.930E+05
Simulation of a 3% increase rate of invisible radiation1659 kW m-2 at core average after increase
0.0776 kW m-2 on crust average after increase0.3776 kW m-2 total to emit288.59 oK required temperature of water to emit total heat
0.43 oC increase of water temperatureEstimate of temperature gradient in earth crust
64000 m earth crust depth evaluation App. 1.1.41550 oC lava temperature (SiO2 M.T.)
1.7 k W m-1 oC-1 for earth crust
0.024 oC m-1 temperature gradient2.40 oC 100 m-1 gradient as in coal mines
0.0709 kW m-2 on crust1 oF for every 75 feet descent experimental = 2.4 oC/100m
Estimate for fuel equivalent combustion emissions for year 20051.00E+13 kg year-1 fuel equivalent consumption
0.0000260 kW m-2 from fuel0.00689% of total heat balance
1.15% of 3% surge in invisible radiationTable 1
41

A1.6 Magnetic needles alinementIn figure 14 the peripheral flows induce a de Coriolis acceleration moment on any soveon, for instance a magnetic needle swivelled around a central axis rotates to become parallel to the flow direction and at the poles there is a sharp dip of the needle axis.
A compass which is a sovon will align parallel streamlines to reduce Coriolis acceleration
Dip parallel to streamlines
Compass
Figure 14 Compass needles align with streamlines
A1.7 Photon-electron-proton-neutron coincidenceA 121.67 nm (1215.668 Å) hydrogen wavelength (40% of the hydrogenspectrum) photon hits an attracting pole and starts surrounding it at a 20pm (+/-) (X - rays diffraction) practically constant distance. The angularvelocity absolute value of the angular acceleration (or the addedperpendicular angular velocity) will be:
(5) | Ωp| = 2 ω v/rv = λ/T, T = 2π/ω, v = λω/ 2π, Ωp = 2λ ω/2πrΩp/ω = λ/πr = 121.67/π/0.020 = 1936
very close to the 1836 "mass" ratio between a proton and an electron.
42

The example illustrates that the measured electron-proton "masses" ratiois the result of the de Coriolis acceleration impeding movement of both theproton and the electron.No electron has been detected without a proton at range or withoutappearance of a photon. Electron, proton and photon are an indivisibletrio.To obtain the pair an existing neutron attracts the photon which "charges"the neutron with a positive charge, a second photon with an oppositeangular velocity (spin) neutralises the said neutron-electron subset, twoneutrons have been obtained etc... Half and more of the molecular weightof all elements is made of neutrons.
Photon/electron/proton/neutron coupling The table of Mendeleiv extension to higher frequencies.A coupling similar to the above mentioned and a similar table isconceivable within any range of frequencies similar to the range 2 x 1013
to 2 x 1017 Hz of Mendeleiv, for example 2 x 1027 to 2 x 1032 Hz. allin the dense core of subsets according to the local density.
A1.8 The sun spherical space contractionω1 = 2 π / 27.3 days = 2.6934 x 10-6 radian/sec for the sunT 1 = 27.3 days = 2360000 sv = 300000 km/s for an emitted photon with frequency 2 x 1015
The theoretical range of the sun is 7.08 x 1011 km = 708 billion km and thecontraction according to the frequency ratio:ω1/ω2 = T 2/T 1 = 4 x 10-16 / 2360000 = 1,7 x 10-22 r/r0 = exp ( - 4π2 ω1
2/ω22) = ~ 1 a quasi perfect sphere due to one single
photon at the photon simultaneity. A very large number of simultaneousphotons would change the order of magnitude.
A1.9 A chemical radical as leptonA carbon atom simultaneous with 2 hydrogen atoms and an iron atom canproduce a chemical radical of some sort.The frequencies are respectively 2 x 1015, 1 x 1015, 1015 . The maximumcommon harmonic frequency in case all the frequencies are prime to eachother would be (2) (2 x 1015) x ( 1 x 1015) x (8 x 1015) = 1.6 x 1045 and the minimum wouldbe 8 x 1015, an acceptable value would be 8 x 1031 of the same order ofmagnitude as the "human lepton" in reference (21) which could explain theadvent of wars or revolutions on earth following "invisible black" radiationeruptions on the sun.
43

Appendix 2 Immediate research for Newton's "glory of geometry".
A2.1 Redefinition of all the electrical and magnetic "induction" laws.A2.2 Redefinition of all fluid "turbulent" flows by separation of de
Coriolis and other accelerations and addition of equation (1) to the developments.
A2.3 Physical. chemical, engineering constants replacement by mathematic demonstrations and subsets definitions.
A2.4 Climate changes/Heat emissions reassessment.A2.5 Continents drift to the North, "hot spots" at the poles of planets
and their satellites and rings including under the earth's South Pole ice cap rivers and lakes research reconsidered by the hot flows from the centre of the earth bearing collected radiation in the centre to dissipate.
A2.6 Weight loss of a charged condenser (19).A2.7 Neutrons free fall trajectories (18).A2.8 Reassessment of "ozone holes" and "black holes" and "missing
mass" in the "light" of black radiation.A2.9 Neurone chemical radicals communication frequencies mapping
and reconnaissance.A2.10 Reconsideration of DNA mapping according to the frequency
communication protocol and range.A2.11 Research about Fe60 in the bottom of the oceans in the light of
the nuclear activity in the earth's dense core.
44

Appendix 3 Immediate developments Previsions
Patent association for Victor de Botton
A3.1 Development of very high frequency antennas to emit/collect upto 1040 Hz using the same trick as nature by coupling frequenciesand using their harmonics to obtain the desired scanning.
A3.2 Super-conductive power transmission, trailer low amperage lowvoltage companion to high amperage, high voltage power lines toput "order" in the de Coriolis state of the higher conductor andthus reduce resistance.
A3.3 Earthquake prevision, continents stability reassessment.A3.4 Satellite landings control according to true acceleration equation
and all space design revamping.A3.5 Fusion, high pressure temperature and radiation reassessment
according to exact movement equationA3.6 Damaged neurone transmission capacity repair by induction of
very high frequencies into their chemical radicalsA3.7 Hardware and software development by the use of the natural
frequency protocol.A3.8 Climate previsions redefinition and software.A3.9 "Black" radiation detection and photo by heavy elements "camera
oscura" coupled with protein selective film sensitive to very highfrequencies using the high frequency radicals embodied tochange the protein colour to translate different invisible highfrequency radiation from outer space to visible patterns.
A3.10 Centripetal acceleration machine for space stations and vehiclesA3.11 Etc...
45
References
(1) Newton PL 2104 - Magic, Medicine and Science Fall 2004Selections from Philosophiae Naturalis Principia Mathematica(Mathematical Principles of Natural Philosophy)* Newton's prefaceto the first edition "motion", "the glory of geometry"
(2) D.E. Rutherford, Vector Methods 1939, University Mathematical Texts, Oliver and Boyd, § 39, p. 49 , § 89 p. 126
(3) Mechanical design and systems handbook - McGraw-Hill book Coy. , 1964 Chapter 3 by Thomas Mitchell, § 3.1, p. 3.3
(4) Barry Spain, Tensor calculus 1960., University Mathematical Texts, Oliver and Boyd, § 64, p. 106 , § 66 p. 111
(5) Mathematical Physics by Eugene Butkov, Adison Wesley PublishingCompany1973 § 11.2 p. 467 The postulate of Quantum Mechanics
(6) Leonard L. Schiff, Quantum mechanics, McGraw-Hill book Coy. , 1955,Chapter 2, § 7 Scroedinger equation
(7) Jean E. Charon, L'esprit et la relativité complexe, Albin Michel 1983Introduction a la PsychophysiqueSection VI Le modèle leptonique, graphe 1 p.120, T=~ 500 x10-26 s.
(8) L.D. Landau and E.M. Lifshitz, Statistical physics, Pergamon press,1970, § 3, Liouville's theorem
(9) The Michelson and Morley 1887 Experiment and the Discovery of Absolute Motion Author/Date: Reginald T. Cahill, 2005 Published: Progress in Physics, 3, 25-29(2005); arXiv: physics/0508174
(10) Michelson-Morley experiments revisited:Systematic errors, Consistency Among Different Experiments, andCompatibility with Absolute space” Hector A. Munera CentroInternacional de Fisica A.A. 251955. Bogota D.C. Colombia ApeironVol. 5 Nr. 1-2 January-April 1998
(11) Extremal parity pair test masses will measurably violate the Equivalence Principle in Eotvos experiments.©2005 Alan M. Schwartz. All Rights Reserved.
(12) J.H. Gundlach and S.M. Merkowitz, Phys. Rev. Lett. 85 2869 (2000).(13) Barry Setterfield and Trevor Norman, The Atomic Constants, Light,
and Time, 1987, invited research report(14) H.S. Hall and S.R. Knight, Higher algebra, MacMillan & Co., London,
1957, Chapter XI(15) Mechanics of fluids by Irving H. Shames McGraw Hill Book Coy. 1962
§ 8-14 p.231 fol.
46

(16) Seymour Lifshutz, Set theory and related topics, Schaum publishing Coy,1964, Chapters 1 to 3.
(17) Valentino Necco - Storia in network con l'eretico Galilei la chiesa uso solo il pugno di velluto, "eppur si muove" con cui Galileo avrebbe accolto la sentenza di condanna www.storiain.net/arret/num35/galil35.htm - 40k
(18) V Nesvizhevsky et al 2001 Nature 415 297(19) DR Buehler / Journal of Space Mixing 2 (2004) 1-22. (20) The logical repertoire of ligand-binding proteins by Ian Graham and
Thomas Duke Institute of physics publishing, Phys. Biol. 2 (2005) 159–165 doi:10.1088/1478-3975/2/3/003
(21) General Relativity and Quantum Cosmology, Hitoshi Kitada Date,Local Time and the Unification of Physics Part I. Local Time, Apeiron, vol.3, no.2, April 1996, pp.38-45
47

N.B. All written and graphic original material herewith is theproperty of Victor Félix de Botton and cannot without his writtenauthorisation, be reproduced, reprinted or used to obtain anypatent for inventions based on or relating to the containedoriginal ideas and developments including theorem, lemmas,formulae and appendices in every and all countries. April 28,2006.
Victor Félix de Botton - Kaplan Place 12 , Beersheva 84288 Israelphone 972-86273890 - [email protected]
ISDN 965-555-116-4
48
Joseph A. Rybczyk
Text Box
More Articles Millennium Relativity home page


















