
The Use of Adjoint Methods in Jet Nozzle Design
85
The Pennsylvania State University The Graduate School The Use of Adjoint Methods in Jet Nozzle Design A Thesis in Aerospace Engineering by Nidhi Sikarwar © 2009 Nidhi Sikarwar Submitted in Partial Fulfilment of the Requirements for the Degree of Master of Science December 2009
Transcript of The Use of Adjoint Methods in Jet Nozzle Design

The Pennsylvania State University
The Graduate School
The Use of Adjoint Methods in Jet Nozzle Design
A Thesis in
Aerospace Engineering
by
Nidhi Sikarwar
© 2009 Nidhi Sikarwar
Submitted in Partial Fulfilment
of the Requirements
for the Degree of
Master of Science
December 2009
ii
The thesis of Nidhi Sikarwar was reviewed and approved∗ by the following:
Philip J. Morris
Boeing/A.D. Welliver Professor of Aerospace Engineering
Thesis Advisor
Dennis K. McLaughlin
Professor of Aerospace Engineering
George A. Lesieutre
Professor of Aerospace Engineering
Head of the Department of Aerospace Engineering
∗ Signatures are on the file in the Graduate School.

iii
Abstract
The use of adjoint methods for aerodynamic design has been a major topic of
research because of its benefits over traditional aerodynamic design. Traditional
aerodynamic design is performed by changing the geometry and solving the flow
equations for many possible geometries to see which one is the “optimum”
geometry. The geometry could be optimum on different bases. One is trying to
minimize or maximize a given objective function. This objective function may be the
drag or lift or some other property depending upon the problem. Adjoint methods
are used to find the direction of steepest descent by finding the gradients of the
objective function with respect to the design parameters. Direct calculation of these
gradients requires massive computational power, whereas solving the adjoint
equation costs the same computationally as solving the flow equation. Hence, the
use of adjoint methods saves on computational cost. In this thesis the use of adjoint
design methods is presented for the design of a jet nozzle contour. The design is
performed in such a manner that it gives a desired pressure distribution on the
nozzle centerline. Both supersonic and subsonic cases are considered to explain the
use of the adjoint method for design.

iv
Table of Contents
List of Figures
Acknowledgements
Chapter 1: Introduction . . . . . . . . 1
1.1 Motivation . . . . . . . . . 1
1.1.1 Background . . . . . . . . 2
1.1.2 The Discrete and Continuous Adjoint Approach . . . 3
1.2 Objective . . . . . . . . . 4
1.3 Thesis Outline . . . . . . . . . 4
Chapter 2: Theoretical and Numerical Development . . . 5
2.1 Adjoint for Quasi-one-dimensional Euler Equation . . . . 5
2.1.1 Introduction . . . . . . . . 5
2.1.2 Problem Formulation (Quasi-One-Dimensional) . . . 7
2.1.3 Example Problem . . . . . . . 10
2.1.4 Numerical Implementation . . . . . . 14
2.2 Theory of Two Dimensional Adjoint Equations . . . . 17
2.2.1 Introduction . . . . . . . . 17
2.2.2 Problem Formulation . . . . . . 18

v
2.2.3 Supersonic case with shocks . . . . . . 25
2.2.4 Numerical Implementation . . . . . . 27
Chapter 3: Results and Discussion . . . . . . 32
3.1 Quasi-one-dimensional Nozzle . . . . . . . 33
3.2 Two-dimensional Nozzle . . . . . . . 40
3.2.1 One Design Parameter . . . . . . 40
3.2.2 Three design parameters . . . . . . 49
3.2.3 Supersonic case with shocks . . . . . . 60
Chapter4: Conclusion and Future Work . . . . . 70
References . . . . . . . . . . 73
Nomenclature . . . . . . . . . 76

vi
List of Figures 2.1.1: A general parabolic shape of nozzle which depends on one design
parameter. . . . . . . . . 10 2.1.2: The distribution of residual with time step iterations for one-dimensional calculations. . . . . . . 15 2.1.3: The distribution of residual with time step iterations on a log – log plot
for one-dimensional calculations. . . . . . . 16 2.2.1: The general geometry of the nozzle for two-dimensional case . . . . 18 2.2.2: Mesh inside the nozzle domain for two-dimensional calculations . . 27 2.2.3: The distribution of increment dx with grid points along the nozzle centerline . . . . . . . . . . 28 2.2.4: The decay of residual with time iterations . . . . . . 30 2.2.5: The decay of residual with time iterations on a log – log plot . . . 30 3.1.1: Initial and final nozzle shapes. The lack line shows the final geometry and the red line shows the initial shape for quasi-one-dimensional flow . . . . . . . . 33 3.1.2: The convergence of the objective function with design cycles for quasi-one-dimensional flow . . . . . . . 34 3.1.3: The convergence on objective function with design cycles on a log-log plot for quasi-one-dimensional flow . . . . . 35 3.1.4: The convergence of the design parameter a with design cycles for quasi-one-dimensional flow . . . . . . . 35
vii
3.1.5: The convergence of the design parameter alpha with design cycles on a log-log plot for quasi-one-dimensional flow . . . . 36 3.1.6: The distribution of final, desired and initial pressure with nozzle axis for quasi-one-dimensional flow . . . . . . 37 3.1.7: The distribution of adjoint variable v1 with the nozzle axis for quasi-one-dimensional flow . . . . . . . . 38 3.1.8: The distribution of second adjoint variable v2 with the nozzle axis for quasi-one-dimensional flow . . . . . . . . 38 3.1.9: The distribution of second adjoint variable v3 with the nozzle axis for quasi-one-dimensional flow. . . . . . . 39 3.2.1: The initial (red), intermediate (green) and final (black) geometry of the rectangular nozzle . . . . . . . . 40 3.2.2: The pressure distribution along the centerline of the nozzle . Red line, blue and black lines show the initial, final and desired pressure respectively . . . . . . . . 42 3.2.3: The mach number distribution along the centerline of the nozzle. Red line, blue and black lines show the initial, final and desired mach number respectively along the nozzle centerline . . . . 42 3.2.4: The convergence of objective function with design cycles. . . 43 3.2.5: Change in design parameter α with design cycles. The desired value of design parameter is 0.25 . . . . . . . . 44 3.2.6: The convergence of the design parameter with respect to the desired value of design parameter (α−αο ) with design cycles on a log – log plot . . . . 44 3.2.7: The distribution of adjoint variable v1 along nozzle axis. . . . 46 3.2.8: The distribution of adjoint variable v2 along nozzle axis. . . . 46 3.2.9: The distribution of adjoint variable v3 along nozzle axis. . . . 47 3.2.10: The distribution of adjoint variable v4 along nozzle axis. . . . 47

viii
3.2.11: The pressure contours inside the nozzle. Upper half of the nozzle shows the pressure contours for the initial geometry and lower half shows the pressure contours for the final geometry . . . . 49 3.2.12: The geometry of the nozzle. Calculations were done only for half the domain, as other half is symmetric . . . . . . 50 3.2.13: The convergence of objective function with design cycles. It can be observed that it reaches the proximity of zero in just 4 design cycles . . 52 3.2.14: The convergence of objective function with design cycles on a log – log plot . . . . . . . . . 52 3.2.15: The convergence of design parameter α1 with design cycles . . . 53 3.2.16: The convergence of design parameter α2 with design cycles . . . 54 3.2.17: The convergence of design parameter α3 with design cycles . . . 54 3.2.18: The distribution of adjoint variable v1 along the nozzle centerline. It can be observed that both boundaries are around zero . . . 56 3.2.19: The distribution of adjoint variable v2 along the nozzle centerline. It can be observed that both boundaries are around zero . . . 56 3.2.20: The distribution of adjoint variable v3 along the nozzle centerline. It can be observed that both boundaries are around zero . . . 57 3.2.21: The distribution of adjoint variable v4 along the nozzle centerline. It can be observed that both boundaries are around zero . . . 57 3.2.22: The pressure distribution along the centerline of the nozzle . . . 58 3.2.23: The pressure contours inside the nozzle. Upper half of the nozzle shows the pressure contours for the initial geometry and lower half shows the pressure contours for the final geometry . . . 59 3.2.24: The decay of objective function with design cycles for supersonic case . . . . . . . . . . . 62 3.2.25: The convergence of objective with design cycles on a

ix
log – log plot for supersonic case . . . . . . 62 3.2.26: The convergence of design parameter α1 with design cycles . . . 63 3.2.27: The convergence of design parameter α2 with design cycles . . . 64 3.2.28: The convergence of design parameter α3 with design cycles . . . 64 3.2.29: The distribution of pressure along nozzle centerline . . . . 65 3.2.30: Pressure contours inside the nozzle domain. Upper half shows the initial flow and lower half shows the final flow . . . . 66 3.2.31: The distribution of shock parameter Z along nozzle axis for final design cycle . . . . . . . . . 66 3.2.32: The distribution of adjoint variable v1 along nozzle centerline for final design cycle . . . . . . . . 67 3.2.33: The distribution of adjoint variable v2 along nozzle centerline for final design cycle . . . . . . . . 68 3.2.34: The distribution of adjoint variable v3 along nozzle centerline for final design cycle . . . . . . . . 68 3.2.35: The distribution of adjoint variable v4 along nozzle centerline for final design cycle . . . . . . . . 69 Flow Chart 1: Algorithm for the adjoint method for designing a nozzle contour with
one design variable. . . . . . . . . . 13
Flow Chart 2: Algorithm for the adjoint method for designing a nozzle contour for
two-dimensional case . . . . . . . . . 23
x
Acknowledgements I would like to give my sincere thanks to my thesis advisor Prof. Philip J. Morris for
his continuous guidance and support during the project. It is because of his
profound knowledge, analytic thinking and technical abilities that I could finish the
project. I would like to thank him for finding financial support for my studies.
My special thanks go to Yongle Du with whom I have discussed the difficulties faced
during this study and it has been a real pleasure working with him. Additionally, I
would like to thank Steve Miller and Swati Saxena who had been there for clearing
my doubts. I would also like to thank my friends and colleagues at Penn State for
their support. I would like to dedicate my thesis to my parents whose undying
support and blessings have always been there in my life. My special gratitude goes
to my sister Dr. Nimisha Singh who always encouraged me in my work.

1
Chapter 1: Introduction
1.1 Motivation
The traditional method of design in aerodynamics has been to depend on the
designer’s intuition. Designers would make a design and then test it in a wind tunnel
to determine its performance. With the introduction of computers, the field of
aerodynamic design was revolutionized. Designs were first tested computationally
and then actual wind tunnel testing was done. This saved a lot of cost because
experiments are very expensive. Computational experiments became the tool for
design. However even these computational methods needed several iterations to
reach an optimal design. These numerical experiments need a large amount of
computations. Even with these large numerical experiments one can not be sure to
have reached the optimal design. An optimal design is the design which optimizes a
certain cost function within the given constraints. A method was needed which
would give the direction in which one should perturb the geometry to reach the
optimum value of cost function. The need for automatic designs came into the
picture with efforts to reduce the number of computational experiments done in
order to reach a final optimal design. For automatic design the gradients of a cost
function with respect to the design parameters are used to find the direction of
steepest decent. But the traditional automatic design methods require a lot of
computational cost to calculate the gradients. This is why one needs to use more
advanced mathematical methods to reduce the computational cost and time. Adjoint
methods are methods that do not need as much computation as traditional methods
to compute the needed gradients.

2
1.1.1. Background
Adjoint methods have been used in optimal control theory since 1971. Nowadays,
adjoint methods are being used for design in computational fluid dynamics more
extensively. Jameson [1-6] first used his knowledge of control theory in the field of
aerodynamic design. He developed continuous adjoint methods for various
governing equations such as the potential equations, and the Euler and Navier-
Stokes equations. An optimal design is the design which optimizes the defined cost
function within the given constraints. The cost function could be taken to be either
the lift or drag coefficients or some difference relative to a desired flow behavior. It
can be chosen to describe any other property with the given constraints such as
airfoil chord, wing volume for fuel, weight or any other constraints. Giles [7] made
important contributions to the use of adjoint methods in aerodynamic design. He
developed an adjoint equation for the quasi-one-dimensional Euler equation [8,9].
In computational fluid mechanics a great deal of computational cost can be used to
find the best geometry. For each new design, the flow solution must be found and
then the results studied. The adjoint method provides the linear sensitivities of an
objective function with respect to a number of design variables that parameterize
the shape. These sensitivities can then be used to derive an optimized solution. The
adjoint method takes considerably less computational cost to provide these
sensitivities. In this way the computational cost can be reduced.
Lions [12] used adjoint methods to develop an optimization technique for systems
that are governed by partial differential equations. The adjoint equations have been
used in optimal control theory for a long time. Pironneau[13] used the adjoint
equations for the first time in fluid dynamics for design work, but Jameson
revolutionized the use of adjoint methods for aerodynamic design. He used them to
find a geometry that optimizes a certain cost function. Jameson et al. [1-3]
developed adjoint methods for potential flow, and the Euler and Navier – Stokes
equations. These methods were then developed for two and three dimensional wing
designs and also for a full aircraft [5, 6]. Some researchers developed adjoint CFD

3
codes for design optimization [14 – 21]. The ‘discrete’ adjoint approach had been
used by Elliott [23] and Neilson and Anderson [24, 25] while working with
unstructured grids. Another interesting work is described by Mohammadi [26]
where automatic differentiation software is used to take an original CFD code as
input to provide the adjoint code.
1.1.2 Discrete and Continuous Adjoint Approaches
Adjoint equations are formulated from the governing equations. They also depend
on the choice of cost function. The cost function is the property that is being
minimized: such as lift or drag. For optimization of a design, it is necessary to find
the perturbation in the cost function due to a perturbation in the geometry and a
corresponding perturbation in the flow field. The goal of adjoint methods is to find
the linearized perturbation of the cost function which is the gradient of the cost
function with respect to the design parameters. Depending upon the approach,
adjoint methods can be divided into two kinds: discrete adjoint and continuous
adjoint. When the governing equations are discretized first and then the adjoint
equations are formulated using the discretized governing equations, then the
approach is known as the discrete approach. It is not necessary to discretize the
adjoint equations in this case. When the governing equations are continuous and
the adjoint equations are formulated using these equations, and then the adjoint
equations are discretized in order to solve them, the approach is known as the
continuous approach.

4
1.2 Objective
The objective of this thesis is to redesign a jet nozzle contour such that the pressure
distribution on the nozzle centerline matches a desired pressure distribution.
Adjoint methods can be used to find the geometry that gives this desired pressure
distribution. For the supersonic case, when there are shocks in the nozzle, this
method can be used to find the geometry such that the shock strength is the cost
function. Then, for example, broadband shock associated noise could be controlled
by controlling the shock strength. The use of the adjoint method for this
optimization should save on the computational cost of the nozzle design.
1.3 Thesis Outline
This thesis is divided into four chapters. Chapter 1 gives an introduction to the
problem. It describes the motivation and background of the topic. Chapter 2 deals
with the formulation of adjoint methods in the context of finding the shape which
gives the desired geometry. It describes how the formulation is different for the one
and two-dimensional cases. Both subsonic and supersonic cases are considered. The
numerical methods used are explained in detail in the same chapter. Chapter 3
presents the results of the use of adjoint methods for subsonic and supersonic cases
for both one and two-dimensional examples. Chapter 4 presents the conclusions of
this thesis and ideas for future work are presented.

5
Chapter 2: Theoretical and Numerical Development
In this chapter, the formulation of the adjoint equation and the numerical technique
to solve it are explained for the quasi-one-dimensional Euler equations. Here, the
continuous approach has been used. The formulation of the adjoint equations for
the two-dimensional Euler equations, their solution and discretization is explained
later in this chapter. The duality of the adjoint solution is explained and proved
mathematically.
2.1 Adjoint for Quasi-one-dimensional Euler Equation
2.1.1 Introduction
The adjoint approach can be outlined by taking a simple example. Say the governing
equations (quasi-Euler, Euler or Navier-Stokes) are given by,
R(U) = 0 , (2.1)
where U is the flow solution and R is a nonlinear differential operator. The solution
will depend on the geometry of the problem. If the geometry is perturbed there will
be a perturbation in flow field U which is given by u. The governing equation can be
linearized with respect to u to give
Lu = f (2.2)
Lets say that the cost function or objective function is given by J(U). For
aerodynamic design, the cost function will be a function of U. Changes in geometry
will result in changes in U and consequently changes in the cost function. The linear
perturbation of the cost function I(u) can then be written as an inner product over
the domain,

6
I(u) = (g,u) (2.3)
for some given function g. where the inner product is given by
(g,u) = gudDD∫
If a direct approach is used for design, I(u) is determined separately for each design
variable by defining the appropriate geometry perturbation and solving the
equation for u. In the adjoint approach this can be determined without explicitly
calculating the perturbed flow field u. This is achieved by solving the adjoint
equation. To formulate the adjoint equation introduce a Langrage multiplier v such
that
I(u) = (g,u) − (v,Lu − f ) (2.4)
v has been introduced to enforce the constraint that u must satisfy Equation (2.2).
The adjoint linear operator
L* is defined by the identity
(v,Lu) = (L*v,u) (2.5)
for all u, v satisfying appropriate homogeneous boundary conditions. Using this,
identity
I(u) = (v, f ) − (L*v − g,u) = (v, f ) (2.6)
is obtained, provided v is the solution of the adjoint equation
L*v − g = 0 (2.7)
The adjoint approach provides exactly the same answer as the direct linear
perturbation analysis [8]. The advantage of the adjoint formulation of the objective
function is that only one adjoint equation needs to be solved in order to get the
sensitivities to all the geometric parameters and hence it saves computational cost
and time.

7
2.1.2 Problem Formulation (Quasi-One-Dimensional Euler Equations)
The nozzle is confined in
−1≤ x ≤1
The equations are the quasi-one-dimensional Euler equations, given by
R(U,h) =ddx
hF( )−dhdx
P = 0 (2.8)
where
U =ρρqρE
,
F =
ρqρq2 + pρqH
and
P =0p0
also,
p = (γ −1)ρ E −q2
2
(2.9)
and
H = E +pρ
(2.10)
Where h(x) represents the half height of the nozzle duct. For small perturbations in
the duct shape h(x) linearized equations can be formed.
Let
˜ h (x) represents the perturbation in h(x)
The linearized equation is given by
Lu − f ≡ddx
hAu( )−dhdx
Bu
−
d ˜ h dx
P −ddx
˜ h F( )
= 0 (2.11)
where u is the perturbation in the flow variable U and
A =∂F∂U
and
B =∂p∂U
Let the objective function be the difference in the pressure distribution from a
desired pressure distribution on the centerline of the nozzle. That is,
J =12
p − pd( )2 dx−1
1∫ (2.12)

8
The cost function sensitivity is given by
I =dJdh
˜ h = p − pd( ) dpdU
dUdh
˜ h −1
1∫ dx (2.13)
but
dUdh
˜ h = u
hence
I = p − pd( ) dpdU
u−1
1∫ dx (2.14)
Introduce the Lagrange multiplier v. A constraint on the objective function can be
enforced by letting,
J =12
p − pd( )2
−1
1∫ dx − vT Rdx−1
1∫ (2.15)
This ensures that the flow satisfies the equation of motion (2.8). That is,
R = 0 .
Then,
I =dJdh
˜ h = p − pd( ) dpdU
u−1
1∫ dx − vT (Lu − f )dx−1
1∫ (2.16)
Set,
dpdU
= gT , Then, consider
vT Ludx−1
1∫ =
vT ddx
hAu( )−dhdx
Bu
dx
−1
1∫
Integration by parts gives
vT Ludx−1
1∫ =
vT hAu( )−1
1−
dvT
dxhAu − vT dh
dxBu
dx
−1
1∫

9
Let
hAT dvdx
−dhdx
BTv = L*v (2.17)
Then
vT Ludx−1
1∫ =
vT hAu( )−1
1− L*v( )T
udx−1
1∫ (2.18)
Then
I = p − pd( )gT u−1
1∫ dx + vT fdx−1
1∫ − L*v( )Tudx
−1
1∫ − vT hAu( )−1
1 (2.19)
= vT fdx−1
1∫ − L*v − p − pd( )g( )Tudx
−1
1∫ − vT hAu( )−1
1
Now we can set
L*v − p − pd( )g = 0 (2.20)
This equation is the “Adjoint Equation” which can be solved for v.
This eliminates the dependence of cost function sensitivity on u except at the
boundaries. Inlet and exit conditions can be chosen to eliminate the explicit
dependence of I on u. That is,
vT hAu( )−1
1= 0 (2.21)
At a boundary where the flow equations have n incoming characteristics, and hence
n imposed boundary conditions, the adjoint equations will thus have (3-n) boundary
conditions corresponding to an equal number of incoming adjoint characteristics.
Then
I = vT fdx−1
1∫ (2.22)
Now, I tells us the rate of change or sensitivity of the objective function with respect
to change in the design parameter or parameters.

10
2.1.3 Example Problem
Assume that the duct shape is a function of a parameter
α
h(x) = α + 1−α( )x 2 (2.25)
Figure 2.1.1 shows the geometry of the duct with the throat area being equal to
α .
Note that,
∂h∂α
=1− x 2 (2.26)
Now return to the flow equation,
R(U,h(α)) = 0 (2.27)
Figure 2.1.1: A general parabolic shape of nozzle which depends on one design parameter.

11
The objective function is given by
J(U,α) . Linearization with respect to
α will give:
h = h +dhdα
dα and
F = F +dFdα
dα
Also,
Lu =ddx
hAu( )−∂h∂x
Bu (2.28)
and
f =∂ 2h
∂x∂αP −
ddx
dhdα
F
(2.29)
Hence
Lu = f can be solved for u.
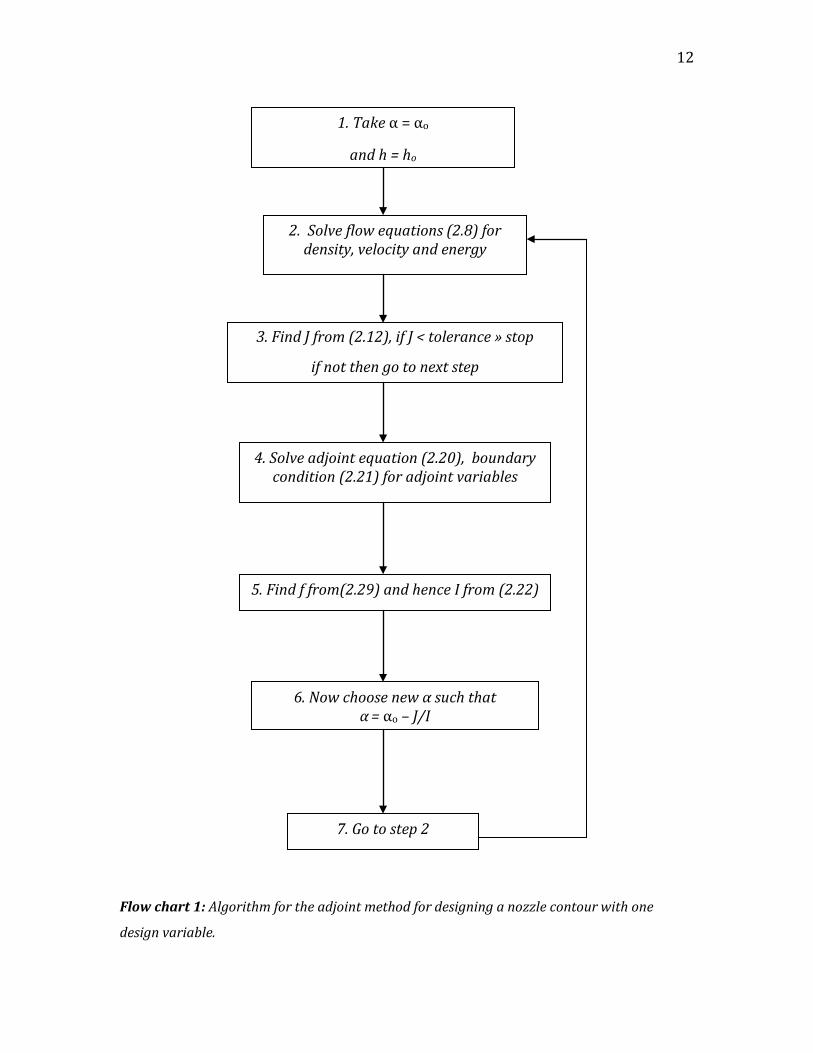
The design process is summarized in the flow chart 1. First take a guessed value of
design parameter α, say αo. The geometry for this value of design parameter is given
by equation (2.25). The governing equations (2.8) are then solved for the flow
properties ρ, p, E and u for the geometry corresponding to this value of design
parameter. The value of objective function corresponding to this geometry can now
be obtained using equation (2.12). The adjoint equations (given by (2.20)) are now
solved with boundary conditions (2.21) for the adjoint variables v1, v2 and v3. Now,
the values of the adjoint variables and flow properties are known inside the domain.
These values can be used to find the value of the sensitivity of the cost function with
respect to the design parameter. The sensitivity of the cost function with respect to
the design parameter is given by (2.22) and can directly be obtained using the
adjoint variables and f. The flow source term f can be obtained using the equation
(2.29). The new value of the design parameter(s) is found based on the steepest
descent method. The process is repeated until the objective function reaches the
desired minimum value.
12
Flow chart 1: Algorithm for the adjoint method for designing a nozzle contour with one
design variable.
1. Take α = αo
and h = ho
2. Solve flow equations (2.8) for density, velocity and energy
3. Find J from (2.12), if J < tolerance » stop
if not then go to next step
4. Solve adjoint equation (2.20), boundary condition (2.21) for adjoint variables
5. Find f from(2.29) and hence I from (2.22)
6. Now choose new α such that α = αo – J/I
7. Go to step 2

13
2.1.4 Numerical Implementation
Finite difference discretization is used to solve the equations (2.8) numerically. The
equations are considered in the conservative form in order to be able to capture the
any shock that might occur. MacCormack’s explicit technique [27] is used for
discretizing the governing equations. The governing equations (2.8) are described in
section 2.1.2. The MacCormack scheme is implemented in two steps. The first step is
known as the predictor step and is given by,
Ui* = Ui
t −dtdx
hF( )i+1
t − hF( )i
t( )+∂h∂x i
pit + Si
t (2.30)
where u* is the intermediate flow solution. The second step is the corrector step which is
given by,
Uit +dt = 0.5 Ui
t + Ui*( )−
dtdx
0.5 Ui* −Ui−1
*( )+ Sit +dt (2.31)
An artificial dissipation with a coefficient equal to 0.4 is always used to capture the shock
when there is shock in the solution. The artificial dissipations
Sit and
Sit +∆t are given by
Sit =
Cx pi+1t − 2pi
t + pi−1t
pi+1t + 2pi
t + pi−1t ui+1
t − 2uit + ui−1
t( ) (2.32)
Sit +∆t =
Cx pi+1* − 2pi
* + pi−1*
pi+1* + 2 pi
* + pi−1* ui+1
* − 2ui* + ui−1
*( ) (2.33)
The grid is uniform in the entire domain. A fine grid with 151 points is used to obtain the
numerical solution of the problem. Local time stepping is implemented to reach to the
steady state solution as a time accurate solution is not necessary. A very small time step
(5 x10-6) is used to obtain a stable numerical solution. CFL number is taken to be
0.0255.
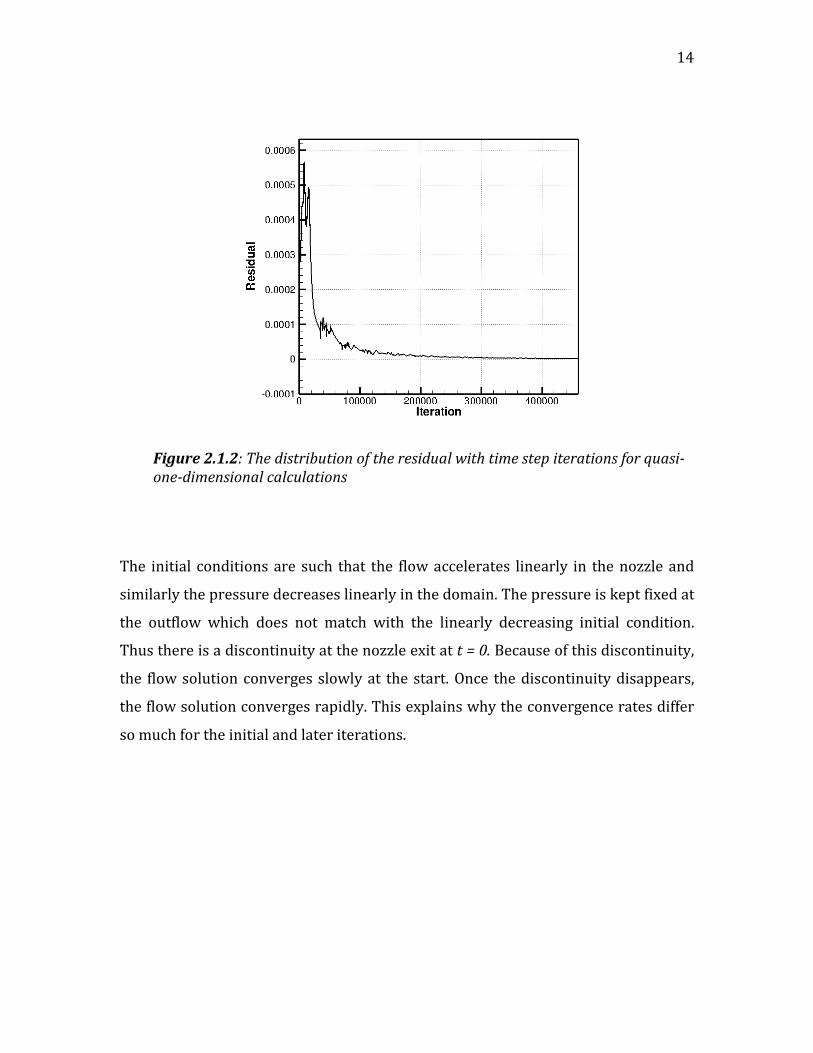
Figures 2.1.2 and 2.1.3 show the decay in the residual with time steps on a linear and on a
log – log plot respectively. It took approximately 106 time steps to converge to a 10-6
convergence level.
14
The initial conditions are such that the flow accelerates linearly in the nozzle and
similarly the pressure decreases linearly in the domain. The pressure is kept fixed at
the outflow which does not match with the linearly decreasing initial condition.
Thus there is a discontinuity at the nozzle exit at t = 0. Because of this discontinuity,
the flow solution converges slowly at the start. Once the discontinuity disappears,
the flow solution converges rapidly. This explains why the convergence rates differ
so much for the initial and later iterations.
Figure 2.1.2: The distribution of the residual with time step iterations for quasi-one-dimensional calculations

15
Figure 2.1.3: The distribution of the residual with time step iterations on a log – log plot for quasi-one-dimensional calculations.

16
2.2: Theory of Two Dimensional Adjoint Equations
2.2.1 Introduction
This section discusses the formulation of the two dimensional adjoint equations. A
Cartesian coordinate system is used to define the geometry. The physical space is
transformed to a uniform computational domain. The starting point is a system of
nonlinear partial differential equations describing a steady flow within some
computational domain. Curvilinear coordinates
(ξ,η) are used. Using these
coordinates, the partial differential equations describing the flow can be written as
R(U,α) = 0 (2.34)
where
U is the flow solution,
α are the design parameters and R is a nonlinear
differential operator which depends on the mapping from (x,y) to
(ξ,η) . Changing
the shape changes the mapping and hence R. Linearization of R will give the linear
partial differential equation
Lu = f (2.35)
where u is the perturbation in the flow field and f is the change due to the mapping.
Let J be the objective function and
α a vector of design variables. The aim is to find
the sensitivity of the objective function with respect to the design variables. If
J = J(U,α) then,
δJ =∂JT
∂αδα +
∂JT
∂UδU (2.36)
Similarly
δR =∂R∂α
δα +∂R∂U
δU = 0 (2.37)
Multiplying equation 2.37 by vT and subtracting from
δJ , given by 2.36, gives,
17
δJ =∂JT
∂αδα +
∂JT
∂UδU − vT ∂R
∂αδα +
∂R∂U
δU
(2.38)
Thus,
δJ =∂JT
∂α− vT ∂R
∂α
δα +
∂JT
∂U− vT ∂R
∂U
δU (2.39)
If v chosen to satisfy the adjoint equation,
∂JT
∂U− vT ∂R
∂U=0 (2.40)
then the sensitivity of the objective function will be independent of the flow solution
perturbation
δU . Solving the adjoint equation takes a computational effort equal to
that for one flow solution. This way it saves computational cost when multiple
design parameters are considered.
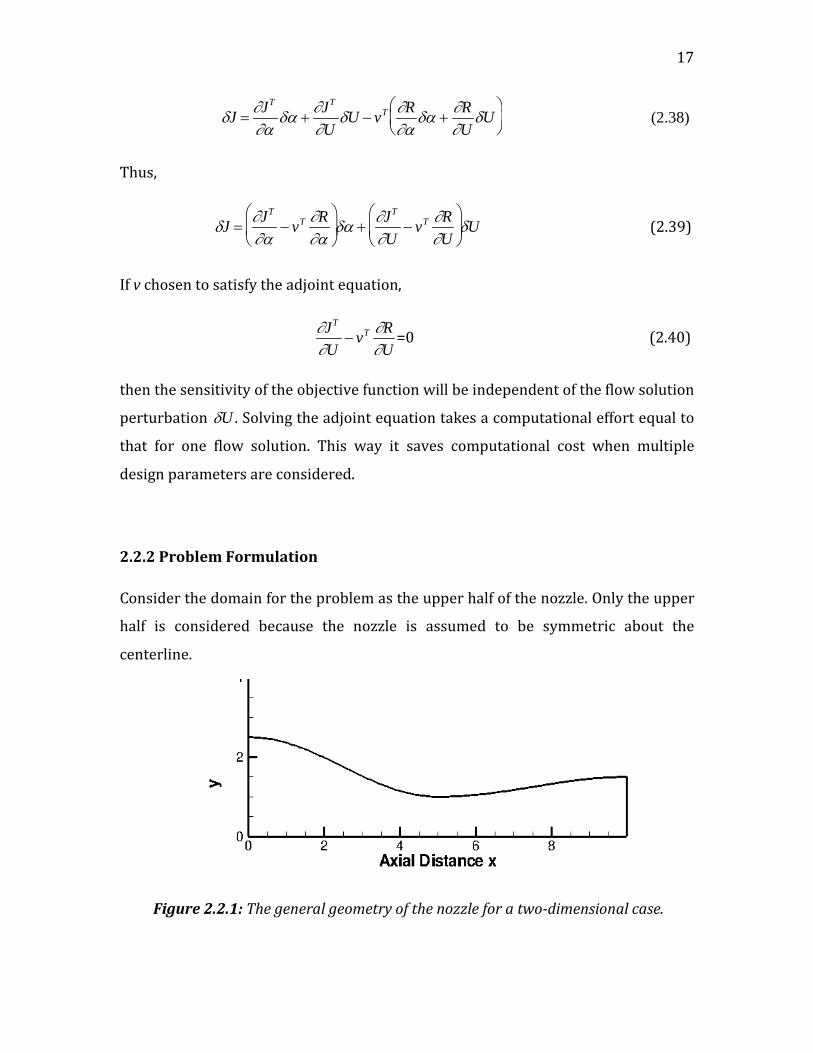
2.2.2 Problem Formulation
Consider the domain for the problem as the upper half of the nozzle. Only the upper
half is considered because the nozzle is assumed to be symmetric about the
centerline.
Figure 2.2.1: The general geometry of the nozzle for a two-dimensional case.

18
The governing equations for the flow are Euler’s equations. In conservative form
Euler’s equations are:
∂U∂t
+∂F∂x
+∂G∂y
= 0 in D (2.41)
where
U =
ρρuρvρE
,
F =
ρuρu2 + pρuvρuH
,
G =
ρvρuvρv 2 + pρvH
The equations are transformed to a curvilinear coordinate system for the purpose of
solving the equations numerically. The transformation matrix is defined by,
K =
∂x∂ξ
∂x∂η
∂y∂ξ
∂y∂η
and the Jacobian by,
Jc =∂x∂ξ
∂y∂η
−∂x∂η
∂y∂ξ
(2.41)

19
Introduce the contravariant velocity components
U 'V '
= K−1 uv
=1J
∂y∂η
−∂x∂η
−∂y∂ξ
∂x∂ξ
uv
(2.42)
Then , in the transformed plane
(ξ,η) , the equations are,
∂U '∂t
+∂F'∂ξ
+∂G '∂η
= 0 in D , (2.43)
where,
U '= J
ρρuρvρE
F '= J
ρU '
ρU 'u +∂ξ∂x
p
ρU 'v +∂ξ∂y
p
ρU 'H
,
G'= J
ρV '
ρV 'u +∂η∂x
p
ρV 'v +∂η∂y
p
ρV 'H
Now, the linearization of the fluxes with respect to the design parameter gives
If these relationships are introduced into the equations of motion (2.43), terms
independent of
˜ α will cancel each other and terms involving the square of
˜ α are
neglected as they are assumed to be small. The linearized equation can then be
written,
(2.44)
F → F +∂F∂U
∂U∂α
˜ α
G → G +∂G∂U
∂U∂α
˜ α
Lu = f

20
where,
and
A =∂F∂U
and
B =∂G∂U
The desired pressure distribution on the nozzle centerline is specified, and a nozzle
contour is to be found which gives this desired distribution. Let the cost function be
defined as the difference between the pressure at the centerline and the desired
pressure at the centerline. The goal is to minimize this cost function.
Thus the cost function is defined as,
J =12
p − pd( )2 dξ0
ξ m∫ (2.45)
Where pd is the desired pressure distribution at the nozzle centerline, p is the
calculated pressure distribution at the nozzle centerline, and
ξ m is the maximum
value of ξ, that is,
0 ≤ ξ ≤ ξ m
Now, multiply the governing equation by vT and subtract from the cost function. This
gives,
J =12
p − pd( )2 dξ0
ξ m∫ − vT Rdξ0
ξ m∫ (2.46)
The cost function sensitivity is given by,
I =∂J∂α
˜ α = p − pd( ) ∂p∂U
udξ0
ξ m∫ − vT Lu − f( )dξ0
ξ m∫ (2.47)
Lu =∂
∂ξAyη − Bxη( )u[ ]+
∂∂η
−Ayξ + Bxξ( )u[ ]
f =∂
∂ξF ∂
∂αyη − G ∂
∂αxη
u
+∂
∂η−F ∂
∂αyξ + G ∂
∂αxξ
u

21
where
u =∂U∂α
˜ α
That is,
I = p − pd( ) ∂p∂U
u − vT Lu
dξ
0
ξ m∫ + vT fdξ0
ξ m∫
Integration by parts and rearrangement leads to,
I = p − pd( ) ∂p∂U
u +∂vT
∂ξ(Ayη − Bxη )
dξ
0
ξ m∫ + vT fdξ0
ξ m∫ + vT (Ayη − Bxη )u0
ξ m
The adjoint equation is chosen such that,
I = vT fdξ0
ξ m∫ (2.48)
Thus the adjoint equation is,
p − pd( )∂p∂U
u +∂vT
∂ξAyη − Bxη( )= 0 (2.49)
with the boundary conditions for the adjoint equation being
vT Ayη − Bxη( )u0
ξm = 0 (2.50)
22
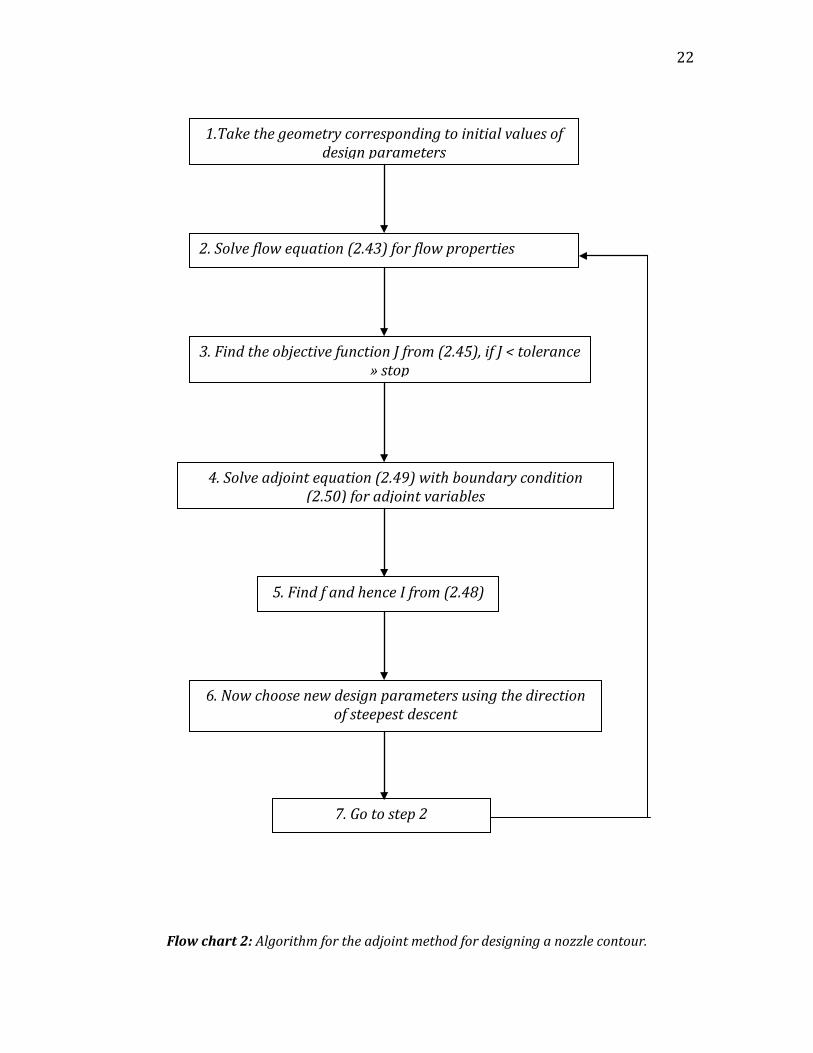
Flow chart 2: Algorithm for the adjoint method for designing a nozzle contour.
1.Take the geometry corresponding to initial values of design parameters
2. Solve flow equation (2.43) for flow properties
3. Find the objective function J from (2.45), if J < tolerance » stop
4. Solve adjoint equation (2.49) with boundary condition (2.50) for adjoint variables
5. Find f and hence I from (2.48)
6. Now choose new design parameters using the direction of steepest descent
7. Go to step 2

23
The process is summarized in flow chart 2. First, take a set of guessed values of the
design parameters α, say αo and find the geometry corresponding this set of design
parameters. The governing equations (2.43) are then solved for the geometry
corresponding to this set of design parameters for the flow properties ρ, p, v, E and
u. The value of the objective function corresponding to this geometry can now be
obtained using equation (2.45). The adjoint equations (2.49) are now solved with
the boundary conditions (2.50) to obtain the adjoint variables v1, v2, v3 and v4. The
value of the gradient of the cost function with respect to the design parameter then
can be directly obtained by equation (2.48) using the adjoint variables. A new value
of design parameter(s) is found based on the steepest descent method. The process
is repeated until the objective function reaches a desired minimum value.

24
2.2.3 Supersonic case with shocks:
In the case of supersonic flow a shock may occur in the flow domain inside the
nozzle. For example if the pressure ratio pa/po equals 0.67 a shock forms near the
nozzle exit. This discontinuity in the flow makes the objective function
discontinuous at the location of the shock, as the objective function is chosen to be
the integral of the pressure difference between the actual and desired values along
the nozzle centerline. With this discontinuity in the flow the adjoint equations can
not be solved. To remove the discontinuity in the objective function the objective
function is redefined as,
J =12
λ1Z2 + λ2
dZdξ
2
dξ
ξ 1
ξ m∫ − vT Rdξξ 1
ξ m∫ (2.51)
where Z is defined by equation (2.58). The gradient of the objective function with
respect to the design parameter(s) (also known as sensitivity) is given by,
I =dJdα
˜ α (2.52)
This leads to,
I = Z ∂p∂U
uξ 1
ξ m∫ dξ − vT (Lu − f )dξξ 1
ξ m∫ where
u =∂U∂α
˜ α
Hence, in this formulation Z replaces (p-pd). Here
ξ1 ≤ ξ ≤ ξm is the centerline coordinate. In this particular case
ξ1 = 0
Integration by parts and rearrangement leads to,
I = Z ∂p∂U
u − vT Lu
dξ +
0
ξ m∫ vT fdξ0
ξ m∫ (2.53)
The adjoint equation is chosen such that,

25
I = vT fdξ0
ξ m∫ (2.54)
Thus the adjoint equation is,
Z ∂p∂U
u +∂vT
∂ξAyη − Bxη( )= 0 (2.55)
with the boundary conditions for the adjoint equation being chosen such that,
vT Ayη − Bxη( )u0
ξm = 0 (2.56)
During the derivation of the adjoint equation it is also necessary to enforce the condition,
Z dδZdξ
ξ1
ξ m
= 0 . (2.57)
From this it is chosen that Z(
ξ 1)=Z(
ξ m)=0.
Z is calculated numerically in the domain.
The values of
λ1 and
λ2 are chosen such that the equation,
λ1Z − λ2d2Zdξ 2 = p − pd (2.58)
has a smooth solution for Z.
The solution procedure is,
1. solve the flow equation
2. solve for the shock parameter Z
3. solve the adjoint equation
4. calculate the value of the objective function
5. correct the design parameter in the direction of steepest descent

26
2.2.4 Numerical Implementation
The two-dimensional physical space is mapped to a uniform computational space.
Cartesian coordinates (x,y) are transformed to a uniform computational
domain
(ξ,η) . Every constant
ξ line corresponds to a constant x line and every
constant
η line corresponds to a contour in the y direction. The grid distribution is
uniform in the
η direction but it is not uniform in
ξ direction. Figure 2.2.2 shows
the grid inside the domain. The distribution of the increment dx is shown in figure
2.2.3. This distribution is chosen such that the flow in the convergent and divergent
sections is captured accurately. There is more clustering near the outflow and less
clustering near the inflow. A fine grid with 201x21 points is used to obtain the
numerical solution of the problem. A very small time step (5 x10-7) is used to get a
stable numerical solution. The CFL number is taken to be
0.0068.
Figure 2.2.2: Mesh inside the nozzle domain for two-dimensional calculations.

27
Local time stepping is used to obtain the steady solution. The second order explicit finite
difference MacCormack scheme is used to find the flow solution [27]. It is a predictor
corrector scheme. The first step is known as predictor step given by,
ui, j* = ui, j
t −dtdξ
f i+1, jt − f i, j
t( )−dtdη
gi, j +1t − gi, j
t( )+ Si, jt (2.59)
where u* is the intermediate flow solution. The second step is the corrector step, which is
given by,
ui, jt +∆t = 0.5 ui, j
t + ui, j*( )−
dtdξ
0.5 f i, j* − fi−1, j
*( )−dtdη
0.5 gi, j* − gi, j−1
*( )+ Si, jt +∆t (2.60)
Where
ui, jt ,gi, j
t and
fi, jt are the components of the vectors defined by equation (2.43) at
the grid point i, j and time step t.
Figure 2.2.3: The distribution of increment dx with grid points along the nozzle centerline.

28
Artificial dissipation with a coefficient 0.4 is used to smooth the shock when there is
shock in the solution. The artificial dissipation factors are
Si, jt and
Si, jt +∆t , given by
Si, jt =
Cx pi+1, jt − 2pi, j
t + pi−1, jt
pi+1, jt + 2pi, j
t + pi−1, jt ui+1, j
t − 2ui, jt + ui−1, j
t( )+Cy pi, j +1
t − 2 pi, jt + pi, j−1
t
pi, j +1t + 2 pi, j
t + pi, j−1t ui, j +1
t − 2ui, jt + ui, j−1
t( ) (2.61)
Si, jt +∆t =
Cx pi+1, j* − 2pi, j
* + pi−1, j*
pi+1, j* + 2pi, j
* + pi−1, j* ui+1, j
* − 2ui, j* + ui−1, j
*( )+Cy pi, j +1
* − 2pi, j* + pi, j−1
*
pi, j +1* + 2pi, j
* + pi, j−1* ui, j +1
* − 2ui, j* + ui, j−1
*( ) (2.62)
Figures 2.2.4 and 2.2.5 show the decay in the residual with time steps on a direct and on a
log – log plot respectively. The behavior of the residual can be explained by the initial
conditions. Initial conditions are such that the pressure decreases linearly in the
nozzle and reaches its minima at the nozzle exit. The boundary conditions are such
that pressure is kept fixed at the nozzle exit which is much higher than the linearly
described pressure value, hence there develops a discontinuity at the nozzle exit.
Because of this discontinuity the convergence rate is smaller to start with. Once the
discontinuity disappears, the flow solution converges much more rapidly.

29
Figure 2.2.4: The decay of the residual with time iterations.
Figure 2.2.5: The decay of residual with time iterations on a log – log plot.

30
In this chapter the formulation of the adjoint equations has been discussed for
quasi-one-dimensional and two-dimensional Euler equations. The use of the adjoint
equation to find the gradient of the cost function with respect to the design
parameters is then explained. The geometry that gives an optimum value of cost
function can be found using these gradients. The case when there is shock inside the
nozzle is considered separately and the formulation is described for that case. The
chapter then briefly describes the numerical implementation of these methods. In
the next chapter the results of the use of these methods are given. The geometry
that gives an optimum value of the cost function is obtained for quasi-one-
dimensional and two-dimensional cases. These results are discussed in the next
chapter.

31
Chapter 3: Results and Discussion
In the previous chapter it was shown how adjoint methods could be used to
determine a nozzle shape with particular flow characteristics. To assess the method
further, a desired pressure distribution is taken to be such that the corresponding
nozzle shape is known. For this known shape, the pressure distribution at the nozzle
centerline is calculated by solving the Euler equations (one or two dimensional).
Then the shape is perturbed from the desired one. The first design cycle uses this
new shape to find the flow solution. Then the adjoint solution and hence the
gradient of the objective function with respect to the design parameter(s) is
determined. This gradient is used to calculate the next value of design parameter as
follows
α new = α old −J
∂J∂α( )
. (3.1)
Here
α new is the new value of the design parameter,
α old is the previous value of the
design parameter,
J is the objective function corresponding to the previous value of
the design parameter, and
∂J∂α
is the gradient of the objective function with respect
to the previous value of the design parameter (calculated using adjoint methods).
When there are several design parameters {
α i}
α inew = α i
old −J
∂J∂α i
(3.2)
Either (3.1) or (3.2) is iterated until the value of the objective function reaches a
desired limit: usually a small value. It generally takes small number of iterations to
reach to the desired limit. This is discussed in detail along with a discussion of the
individual cases.

32
Quasi-one-dimensional and two-dimensional cases are considered to determine the
nozzle shape that gives the desired pressure distribution on the nozzle centerline.
Both subsonic and supersonic flows are considered. The findings are compared with
earlier results by Giles [7] and Jameson [1]. The general properties of the one-
dimensional results match those that Giles had anticipated. Two different kinds of
nozzle geometries are considered for the two-dimensional case – one with one
design parameter and other with three design parameters.
3.1 Quasi-one-dimensional Nozzle
A convergent-divergent nozzle is considered here. The use of the adjoint method to
determine a geometry which gives the desired pressure distribution is
demonstrated. The nozzle under consideration has a very simple shape given by a
parabola. That is,
h(x) = α + 1−α( )x 2 (3.3)
Figure 3.1.1: Initial and final nozzle shapes. The black line shows the final geometry and the red line shows the initial shape for quasi-one-dimensional flow.

33
The parabola depends on a single parameter α. As discussed earlier, the flow inside
a nozzle depends mainly on the axial position and area ratio. Hence, the quasi-one-
dimensional equations (2.8) are considered to determine the flow properties inside
the nozzle.
Figure 3.1.1 shows the geometry of the nozzle. Note that the actual equations are
quasi-one-dimensional. The exact shape changes with the value of the design
parameter α. The desired pressure distribution corresponds to value of α = 0.8. This
geometry is shown in black in the figure. This is the value which is needed to be
reached by the adjoint design method. To start the design procedure, the initial
value of α is taken to be 0.68, the corresponding geometry is shown by the red line
in figure 3.1.1. The corresponding pressure distribution is found numerically at the
nozzle centerline for a subsonic case. The geometry is parabolic and the area ratio
(Ae/Ao) is equal to one and so is the pressure ratio. To ensure that there is a flow
inside the nozzle, a small velocity has been assigned at the inflow. The flow
accelerates inside the nozzle and then it decelerates to have the exit Mach number
equal to the inlet Mach number. After the first design cycle, the value of α obtained
is 0.6779. This value of α is now used to obtain the next value of α. The MacCormack
scheme [27] is used to determine the flow solution. Details of the numerical method
are given in section 2.1.4.
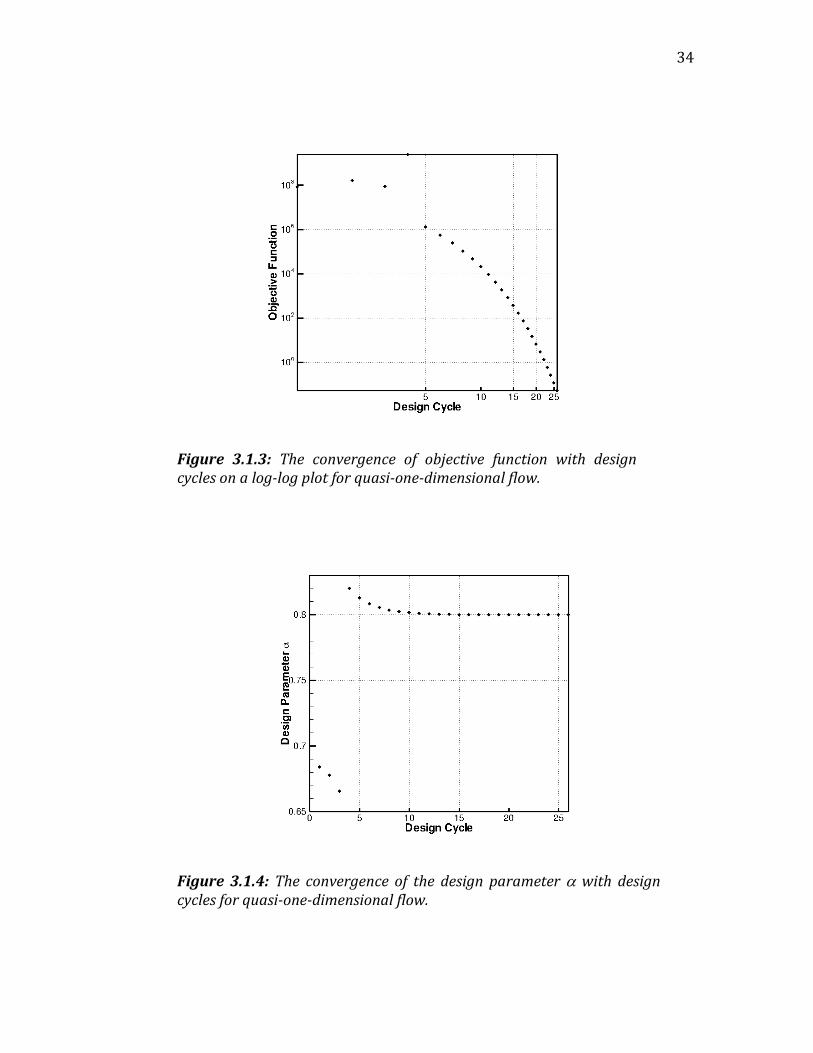
Figure 3.1.2: The convergence of the objective function with design cycles for quasi-one-dimensional flow.
34
Figure 3.1.4: The convergence of the design parameter α with design cycles for quasi-one-dimensional flow.
Figure 3.1.3: The convergence of objective function with design cycles on a log-log plot for quasi-one-dimensional flow.

35
The decrease in the value of (p-pd)2 (i. e. the difference in the desired and numerical
pressure) is rapid initially and gradual afterwards, hence the objective function
drops rapidly for first few design cycles and then it drops more gradually as shown
in figure 3.1.2. The objective function shows a very good rate of convergence as does
the design parameter as shown in figure 3.1.4. It took approximately 17 design
cycles to converge to a value of α = 0.80009. The corresponding value of objective
function is 73.93 (N/m2)2, which is a drop from its initial value of 8.563 x 104
(N/m2)2. Figure 3.1.5 shows the convergence of the design parameter α with design
cycles on a log – log plot. The design parameter converges steadily towards the
desired value.
Figure 3.1.5: The convergence of the difference of design parameter α and required design parameter αο with design cycles on a log-log plot for the quasi-one-dimensional flow.

36
Figure 3.1.6 shows the initial, final and desired pressure distributions. The initial
pressure distribution is given by red in the figure. The final pressure distribution is
given by blue which overlaps the desired pressure distribution (symbols). The
maximum difference between initial and final pressure distributions is
approximately 20000 N/m2. Τhe difference between the desired and final pressure
distributions is negligible. Hence, from now onwards, there is no need for additional
design cycles and it can be observed from the α and objective function convergence
plots, figures 3.1.4 and 3.1.2, that the change is negligible after a certain number of
design cycles.
Figure 3.1.6: The distribution of the final, desired and initial pressure distribution (with respect to total pressure po) as function of axial distance inside nozzle. The symbols represent the desired pressure distribution, the blue line represents the final pressure distribution, and the red line represents the initial pressure distribution for quasi-one-dimensional flow.
37
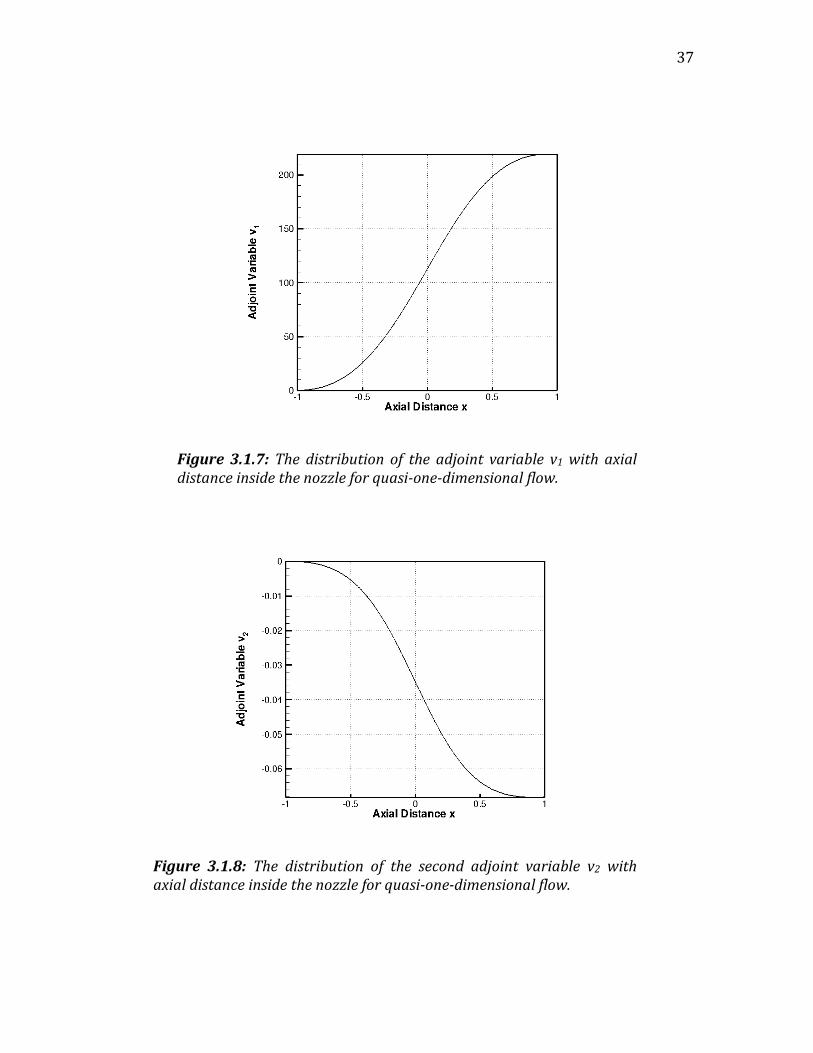
Figure 3.1.7: The distribution of the adjoint variable v1 with axial distance inside the nozzle for quasi-one-dimensional flow.
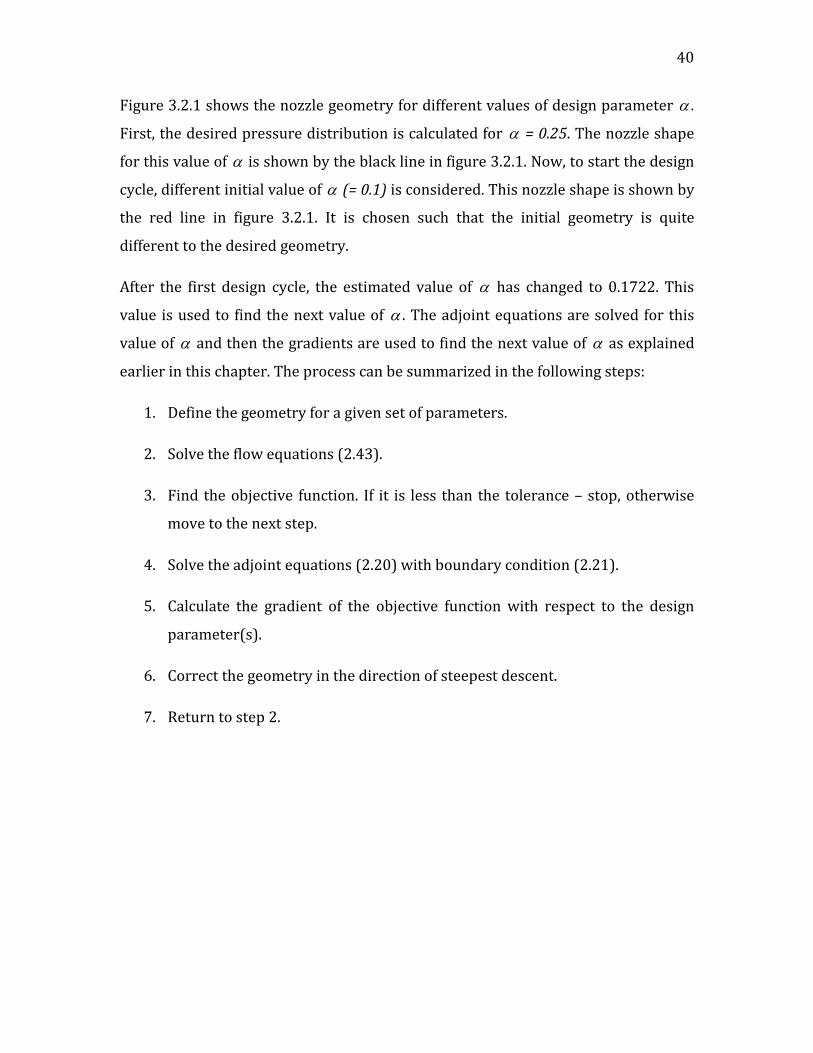
Figure 3.1.8: The distribution of the second adjoint variable v2 with axial distance inside the nozzle for quasi-one-dimensional flow.

38
Figures 3.1.7 – 3.1.9 show the distribution of the adjoint variables v1, v2 and v3 along
the nozzle centerline for the final geometry. As discussed in previous work by Giles
(8), adjoint variables are continuous inside the domain. However, one thing to take
note of is that these variables are not equal to zero at the nozzle exit. This seemed to
be a requirement in the formulation of the method in order to eliminate the
dependence on the flow variable fluctuations but the actual requirement is that the
derivative
∂v∂x should be zero at the inlet and the outlet. At the inlet a Dirichlet
boundary condition is implemented so that the adjoint variables are zero. The outlet
boundary is kept free which shows that although the adjoint variables are not zero,
their gradients are, which is the requirement of the method. It should be recalled
that the inner product of the adjoint variables with the right hand side of the
linearized flow equations, which depends on the geometry, gives the sensitivity of
the cost function to the design parameter(s).
Figure 3.1.9: The distribution of the initial adjoint variable v3 with axial distance the nozzle for quasi-one-dimensional flow.

39
3.2 Two-dimensional Nozzle
A two-dimensional nozzle is considered for this case. The flow is considered to be
inviscid and the two-dimensional compressible inviscid equations are used as the
governing equations in conservative form (section 2.2.2). Two different cases are
considered in this section. First, a simple case where the nozzle geometry depends
on only one design parameter is studied. A subsonic flow solution is found for this
case. The second case is where the nozzle geometry depends on three design
parameters. All three design parameters are varied and design iterations are
performed to obtain the desired centerline pressure distribution. First the subsonic
case is presented and then a case where a shock forms inside the nozzle is
presented.
3.2.1 One Design Parameter
To demonstrate the design method a simple case is considered first. A nozzle shape
is introduced that is governed by only one design parameter. This parameter is
denoted by
α . The nozzle contour is given by the equations,
y =1.75 − (0.5 + α)cos((0.2x −1)π ) for
0 ≤ x ≤ 5
y =1.25 −α cos((0.2x −1)π ) for
5 ≤ x ≤10 (3.4)
Figure 3.2.1: The initial (red), intermediate (green) and final (black) geometry of the rectangular nozzle.
40
Figure 3.2.1 shows the nozzle geometry for different values of design parameter
α .
First, the desired pressure distribution is calculated for
α = 0.25. The nozzle shape
for this value of
α is shown by the black line in figure 3.2.1. Now, to start the design
cycle, different initial value of
α (= 0.1) is considered. This nozzle shape is shown by
the red line in figure 3.2.1. It is chosen such that the initial geometry is quite
different to the desired geometry.
After the first design cycle, the estimated value of
α has changed to 0.1722. This
value is used to find the next value of
α . The adjoint equations are solved for this
value of
α and then the gradients are used to find the next value of
α as explained
earlier in this chapter. The process can be summarized in the following steps:
1. Define the geometry for a given set of parameters.
2. Solve the flow equations (2.43).
3. Find the objective function. If it is less than the tolerance – stop, otherwise
move to the next step.
4. Solve the adjoint equations (2.20) with boundary condition (2.21).
5. Calculate the gradient of the objective function with respect to the design
parameter(s).
6. Correct the geometry in the direction of steepest descent.
7. Return to step 2.

41
Figure 3.2.2: The pressure distribution (with respect to total pressure po) along
the centerline of the nozzle. The red and blue lines show the initial and final
pressure respectively along the nozzle centerline. The desired pressure is shown
Figure 3.2.3: The Mach number distribution along the centerline of the nozzle. The red
and blue lines show the initial and final Mach number respectively along the nozzle
centerline. The desired Mach number is shown by symbols.

42
Figure 3.2.4: The decay of the objective function with design cycles. It decays rapidly initially and then it converges steadily to zero. The second plot shows the same data on a log-log scale.

43
Figure 3.2.6: The convergence of the design parameter with respect to the desired value of design parameter (α−αο ) with design cycles on a log – log plot .
Figure 3.2.5: Change in the design parameter α with design cycles. The desired value of design parameter is 0.25.

44
This procedure gives the value of
α to be 0.2497 in 10 design cycles. For this value
of design parameter the flow properties in the nozzle match closely with the desired
values (figures 3.2.2 and 3.2.3). The decay of the objective function with design
cycles is shown in figure 3.2.4, it decays rapidly initially and then it decays steadily
to close to zero. To understand the convergence of the objective function, it is shown
on a log-log plot in figure 3.2.4. The convergence of
α on the log-log plot is shown in
figure 3.2.6. These convergence rates are lower that the convergence rates of the
one-dimensional solution. It was observed that after 10 design cycles
α keeps on
fluctuating and does not converge any further. It reaches the proximity of the
desired value and then it keeps oscillating around that. The reason for the
oscillations can be given by the fact that pressure distribution is already close to the
desired pressure distribution and further design cycles are not really useful. It could
also be the limit of the resolution of the numerical solution.
45
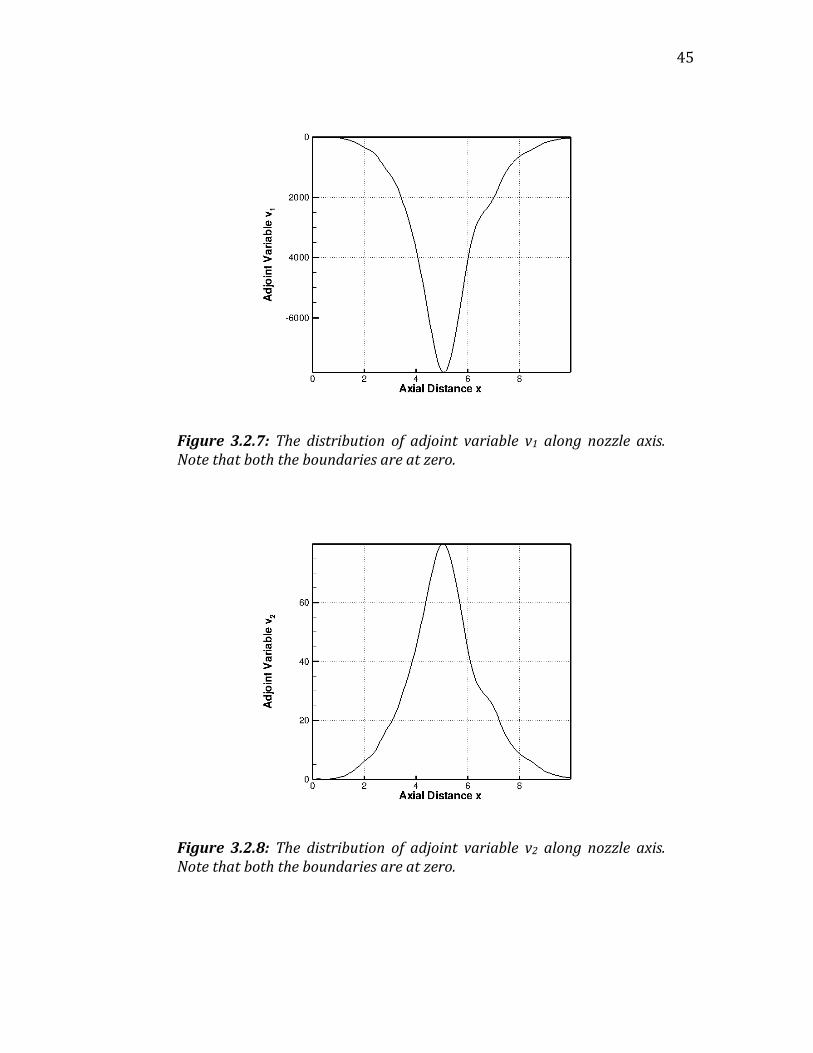
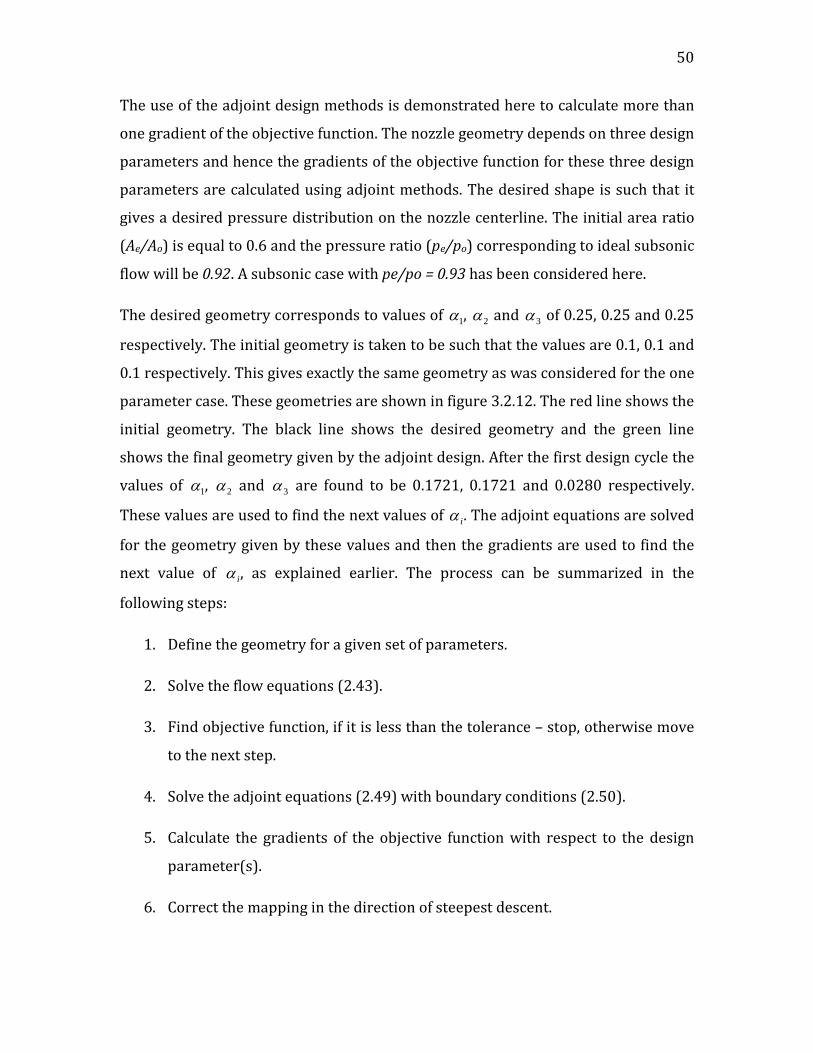
Figure 3.2.8: The distribution of adjoint variable v2 along nozzle axis. Note that both the boundaries are at zero.
Figure 3.2.7: The distribution of adjoint variable v1 along nozzle axis. Note that both the boundaries are at zero.

46
Figure 3.2.9: The distribution of adjoint variable v3 along nozzle axis. Note that both the boundaries are at zero.
Figure 3.2.10: The distribution of adjoint variable v4 along nozzle axis. Note that both the boundaries are at zero.

47
The distribution of the adjoint variables for final design cycle is shown in the figures
3.2.7 - 3.2.10 for a subsonic flow. The adjoint variables are continuous throughout
the nozzle for the subsonic case. In the two dimensional case, adjoint variables have
values of zero at both boundaries. Zero Dirichlet boundary conditions have to be
implemented numerically in order to obtain the solution of the adjoint equations.
This is different than the one-dimensional case. For the one-dimensional case the
values of the adjoint variables are non-zero at the outflow boundary. For the one-
dimensional case no boundary condition was needed at the outflow boundary. The
value of the third adjoint variable is zero throughout on the centerline (figure 3.2.9).
The third adjoint variable corresponds to the y component of the velocity and that is
zero on the centerline of the nozzle. This indicates that the gradient of the objective
function is independent of the y component of velocity on centerline, which is, of
course, zero. Figures 3.2.2 and 3.2.3 show the distribution of Mach number and
pressure respectively at the nozzle centerline. The value of pe/po is kept constant
and is equal to 0.93 to ensure subsonic flow inside the nozzle. The initial and final
flow properties are quite different from each other. The final flow properties are
equal to the desired flow properties which shows that very good convergence is
achieved through this method. The flow solutions for the initial and final geometries
inside the whole nozzle domain are shown for a case of subsonic flow in figure
3.2.11. It can be noticed that the initial and final flows are quite different especially
at the nozzle throat. A low-pressure zone extends for the final flow at the throat
which is same as the desired condition.

48
3.2.2 Three design parameters
In this section a more complicated nozzle geometry is considered to show the
advantage of the adjoint method. In this case the nozzle geometry depends on three
design parameters. This is the practical case as adjoint methods are most cost
effective when there are several design parameters. The design parameters are
denoted by
α1,
α2 and
α3 . The nozzle contour equations are ,
Figure 3.2.11: Pressure contours inside the nozzle. The upper half of the nozzle shows the
pressure contours for the initial geometry and the lower half shows the pressure contours
for the final geometry.

49
for
0 ≤ x ≤ 5
y =1.75 − (0.5 + α1)cos((0.2x −1)π ) −α2 cos((0.2x −1)π ) + α3 cos((0.2x −1)π )
for
5 ≤ x ≤10
y =1.25 −α1 cos((0.2x −1)π ) −α2 cos((0.2x −1)π ) + α3 cos((0.2x −1)π ) (3.5)
The equation (3.5) is such that α2 and α3 can be combined to give one new design
parameter. Then the geometry will depend only on two design parameters. Breaking
up the geometry into more parts gives the freedom of perturbing the geometry in
more places.
Figure 3.2.12: The geometry of the nozzle. Calculations were performed for only half the
domain. The red line shows the initial geometry. The green line shows the final geometry. The
black line shows the geometry that gives the desired pressure distribution.
50
The use of the adjoint design methods is demonstrated here to calculate more than
one gradient of the objective function. The nozzle geometry depends on three design
parameters and hence the gradients of the objective function for these three design
parameters are calculated using adjoint methods. The desired shape is such that it
gives a desired pressure distribution on the nozzle centerline. The initial area ratio
(Ae/Ao) is equal to 0.6 and the pressure ratio (pe/po) corresponding to ideal subsonic
flow will be 0.92. A subsonic case with pe/po = 0.93 has been considered here.
The desired geometry corresponds to values of
α1,
α2 and
α3 of 0.25, 0.25 and 0.25
respectively. The initial geometry is taken to be such that the values are 0.1, 0.1 and
0.1 respectively. This gives exactly the same geometry as was considered for the one
parameter case. These geometries are shown in figure 3.2.12. The red line shows the
initial geometry. The black line shows the desired geometry and the green line
shows the final geometry given by the adjoint design. After the first design cycle the
values of
α1,
α2 and
α3 are found to be 0.1721, 0.1721 and 0.0280 respectively.
These values are used to find the next values of
α i. The adjoint equations are solved
for the geometry given by these values and then the gradients are used to find the
next value of
α i, as explained earlier. The process can be summarized in the
following steps:
1. Define the geometry for a given set of parameters.
2. Solve the flow equations (2.43).
3. Find objective function, if it is less than the tolerance – stop, otherwise move
to the next step.
4. Solve the adjoint equations (2.49) with boundary conditions (2.50).
5. Calculate the gradients of the objective function with respect to the design
parameter(s).
6. Correct the mapping in the direction of steepest descent.
51
7. Return to step 2.
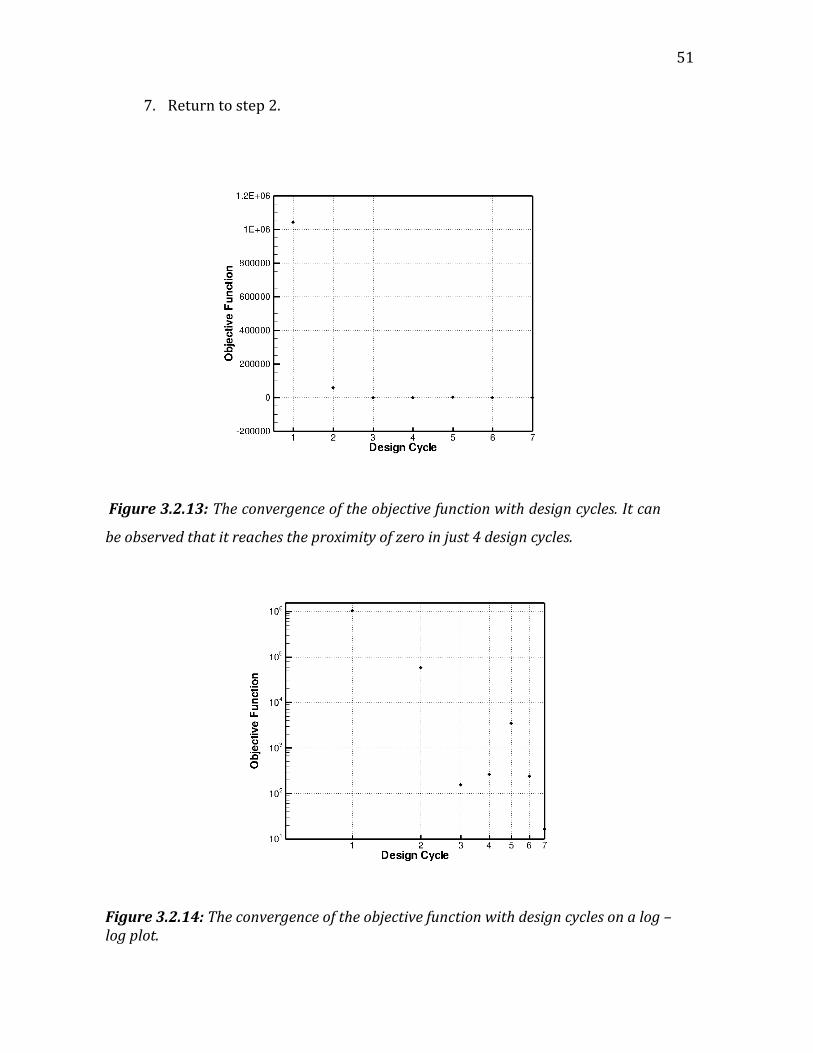
Figure 3.2.14: The convergence of the objective function with design cycles on a log – log plot.
Figure 3.2.13: The convergence of the objective function with design cycles. It can
be observed that it reaches the proximity of zero in just 4 design cycles.

52
In this case it took approximately 7 design cycles to converge to the desired shape. It
can be observed that the final and desired geometry match quite well (figure
3.2.12). The value of the objective function after 7 design cycles is equal to 36.38
(N/m2)2 which is a decrease from an initial value 1.042 x 106 (N/m2)2. So it has
dropped by a more than four orders of magnitude. The convergence of the objective
function is shown in figure 3.2.13. It shows a very good convergence rate which can
be seen on a log – log plot (figure 3.2.14). It is observed that the objective function
drops rapidly initially and then it gradually approaches zero. The rate of
convergence is higher than the one in the case of one parameter only. From the log –
log plot it can be seen that the objective function keeps on oscillating about a small
minimum value. This may be due to the resolution limit of the grid in the flow
simulation.
Figure 3.2.15: The convergence of design parameter α1 with design cycles.

53
Figure 3.2.16: The convergence of design parameter α2 with design cycles.
Figure 3.2.17: The convergence of design parameter α3 with design cycles.

54
The convergence of
α i is shown in figures 3.2.15-3.2.17. One interesting thing about
the results is that although the final geometry matches quite well with the desired
geometry (as do the flow properties), the design parameters do not individually
meet the desired design parameters. The set of design parameters for which the
desired pressure distribution was found is (0.25, 0.25, 0.25) whereas the final set
converged values of design parameters is (0.1502, 0.1502, 0.049794). The geometry
contour given by (3.5) is same for these two sets of design parameters which means
that although the design parameters do not reach the desired set of values, the
geometry does. These values effectively reach their final value in just three design
cycles but they keep on oscillating around those values with more design cycles. The
method could have been truncated at three design cycles where the objective
function has a value equal to 154.2 (N/m2)2.
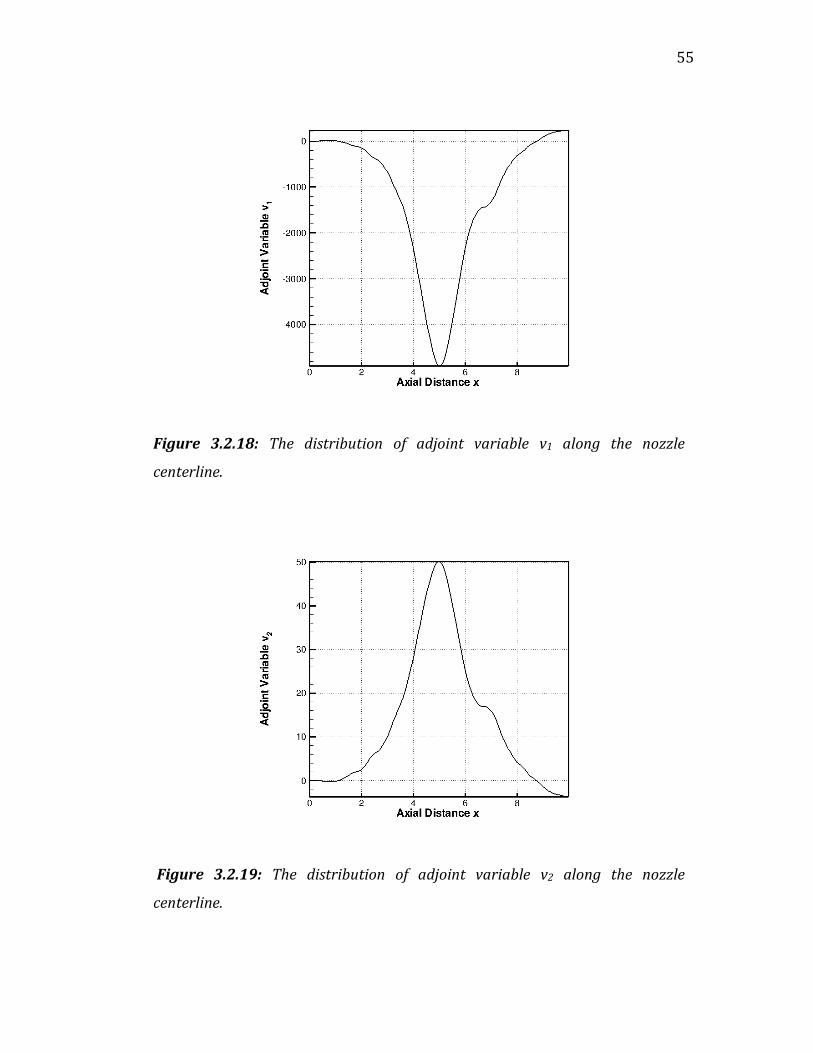
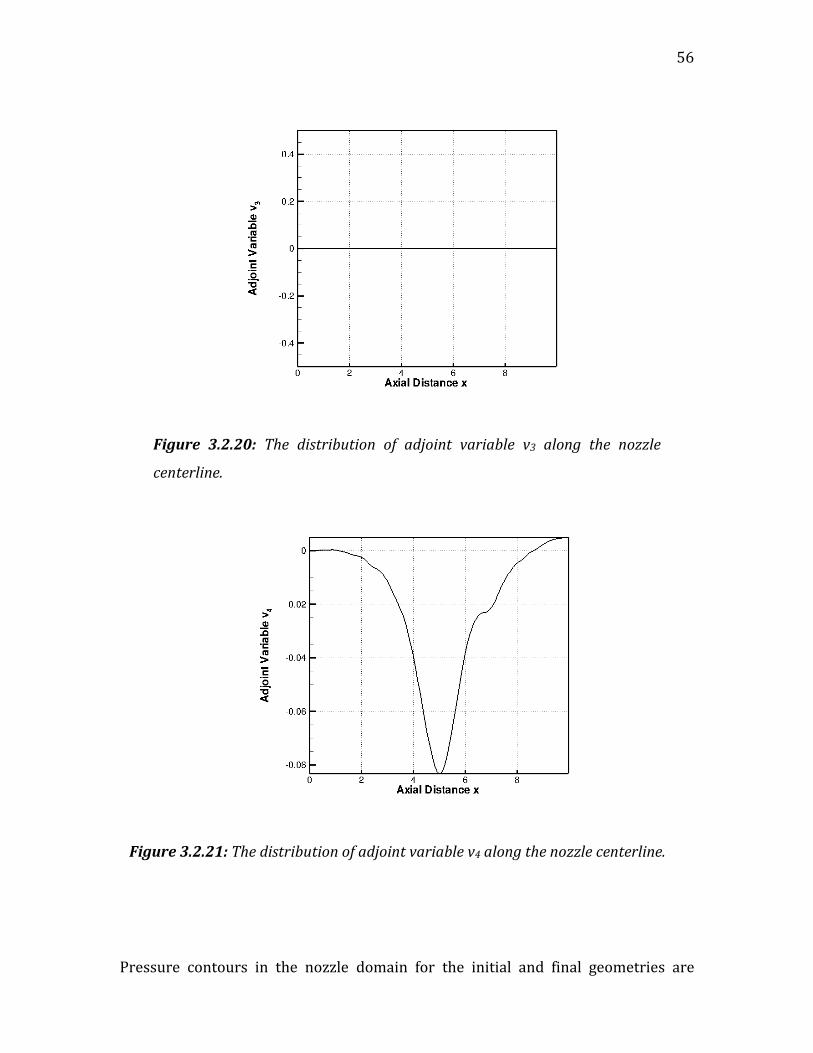
Figures 3.2.18 – 3.2.21 show the distributions of the adjoint variables along the
nozzle centerline for the final design cycle. For the subsonic case, the adjoint
variables are continuous on the centerline. The third adjoint variable (figure 3.2.20)
is zero everywhere on the centerline. It corresponds to the y component of the
velocity. This indicates that the gradient of the objective function is independent of
the y component of velocity on the centerline, which is, of course, zero. Adjoint
variables depend on the flow solution and geometry. As the desired geometry is
same for one parameter and three parameter cases, the distribution of adjoint
variables is very similar for both the cases. Note that the pressure ratio pe/po is kept
same for both cases (= 0.93 for subsonic flow).
55
Figure 3.2.18: The distribution of adjoint variable v1 along the nozzle
centerline.
Figure 3.2.19: The distribution of adjoint variable v2 along the nozzle
centerline.
56
Pressure contours in the nozzle domain for the initial and final geometries are
Figure 3.2.21: The distribution of adjoint variable v4 along the nozzle centerline.
Figure 3.2.20: The distribution of adjoint variable v3 along the nozzle
centerline.

57
shown in figure 3.2.22. It can be seen that the initial and final flows are quite
different. The red and blue lines in the figure 3.2.22 respectively show the initial and
final pressure distribution on the nozzle centerline. The desired pressure
distribution on the nozzle centerline is shown by symbols. The flow properties on
the nozzle centerline match very well with the desired flow property distribution.
The pressure contours inside the entire nozzle domain are shown in figure 3.2.23. It
can be observed from that figure that the initial and final flows are very different
although the exit pressure ratio is kept constant for a subsonic flow inside the
nozzle.
Figure 3.2.22: The pressure distribution (with respect to total pressure po)
along the centerline of the nozzle. The red and blue lines show the initial and
final pressure respectively along the nozzle centerline. The desired pressure is
shown by black symbols.

58
Figure 3.2.23: The pressure contours inside the nozzle. The upper half of the nozzle shows the
pressure contours for the initial geometry and lower half shows the pressure contours for the
final geometry.

59
3.2.3 Supersonic case with shocks
In this section a case is presented where there is shock in the flow solution. In such a
case, the flow in not continuous in the nozzle. Hence, calculations can not be
performed in the same way as for a shock free case. As already discussed previously
a new parameter Z is introduced such that new cost function in terms of Z is
continuous across the shock (see equation (2.58)). A nozzle contour is considered
which depends on three parameters. The design parameters are denoted by
α1,
α2
and
α3 . The nozzle contour equations are,
for
0 ≤ x ≤ 5
y =1.75 − (0.5 + α1)cos((0.2x −1)π ) −α2 cos((0.2x −1)π ) + α3 cos((0.2x −1)π )
for
5 ≤ x ≤10
y =1.25 −α1 cos((0.2x −1)π ) −α2 cos((0.2x −1)π ) + α3 cos((0.2x −1)π ) (3.6)
The initial geometry is taken such that the values of design parameters
α1,
α2 and
α3 are 0.1, 0.1 and 0.1 respectively. The desired geometry is such that the values of
the design parameters
α1,
α2 and
α3 are 0.25, 0.25 and 0.25 respectively. The initial
area ratio (Ae/Ao) is equal to 0.6 and the pressure ratio corresponding to ideal
supersonic flow will be 0.17. The value of pressure ratio (pe/po) is taken to be 0.67 to
ensure shocks in the nozzle. After the first design cycle the values of
α1,
α2 and
α3
are found to be 0.1101, 0.11001 and 0.0899 respectively. The flow equation is solved
for the new geometry defined by these values. Then the value of shock parameter is
calculated to smooth the cost function. This is an extra step for the discontinuous
flows. The adjoint equations are solved again and the gradients are used to find the
next values of the design parameters. The process can be summarized as follows:
60
1. Define the geometry for an initial set of parameters.
2. Solve the flow equation (2.43).
3. Find objective function, if it is less than the tolerance – stop, otherwise move
to the next step.
4. Smooth the cost function if necessary (supersonic case with shocks).
5. Solve the adjoint equations.
6. Calculate the gradient of the objective function with respect to the design
parameter(s).
7. Correct the mapping in the direction of steepest descent.
8. Return to step 2.
In this case it took approximately 32 design cycles to converge to the desired
pressure distribution. The final pressure distribution matched very well with the
desired pressure distribution even though there is a shock in the flow (figure
3.2.32). This case shows different characteristics than the earlier cases. The
objective function does not drop as rapidly. The decay of the objective function with
design cycles is shown in figure 3.2.24. The number of design cycles taken is much
larger than in the other cases. The rate of convergence of objective function is also
shown on a log – log plot (figure 3.2.25). This value of convergence rate is much
smaller than the other cases.

61
Figure 3.2.24: The decay of objective function with design cycles for the supersonic case with a shock.
Figure 3.2.25: The convergence of objective with design cycles on a log – log plot for the supersonic case with a shock.

62
The convergence of
α i is shown in figures 3.2.26-3.2.28. They gradually converge to
the values that are not the originally desired values, but the geometry given by the
converged values is very similar to the desired geometry. The set of design
parameters for which the desired pressure distribution was found is (0.25, 0.25,
0.25) whereas the final set of the converged values of design parameters is (0.1502,
0.1502, 0.04979). Unlike other cases these value take several design cycles to
converge. It took approximately 32 design cycles to reach the proximity of the
desired pressure distribution. It is probable that this reflects the limit of the grid to
resolve smaller changes in the pressure distribution.
Figure 3.2.26: The convergence of the design parameter α1 with design cycles.

63
Figure
Figure 3.2.27: The convergence of the design parameter α2 with design cycles.
Figure 3.2.28: The convergence of the design parameter α3 with design cycles.

64
3.2.29 shows the distribution of pressure on the nozzle centerline. The initial
pressure distribution is shown by a red line. The final pressure distribution is
shown by blue line. The desired pressure distribution is shown by symbols in figure
3.2.29. All these calculations are performed for a fixed value of pressure ratio pe/po
(= 0.67). Initially, the shock was at the nozzle exit and it keeps on moving inside the
nozzle with each design cycle. The final and desired pressure distributions do not
agree exactly but they are very close. The presence of the shock increases the value
of objective function. The initial value of the objective function is 4.39 x 106 (N/m2)2
which drops to a value of 2.13 x 105 (N/m2)2 after 32 design cycles which is a
decrease of 95.14%. The full flow solution for the initial (upper) and final (lower)
geometries inside the nozzle domain is shown in figure 3.2.30. Pressure contours
are shown in the domain. The difference in the two solutions is basically the shock
location. The nozzle is sonic at the throat hence the flow upstream of the throat
remains the same. Whereas, the flow downstream changes with each design cycle.
Figure 3.2.29: The distribution of pressure (with respect to total pressure po)
along nozzle centerline. The red and blue lines show the initial and final
pressure respectively along the nozzle centerline. The desired pressure is shown
by black symbols.

65
Figure 3.2.30: Pressure contours inside the nozzle domain. Upper half shows the initial flow and lower half shows the final flow.
Figure 3.2.31: The distribution of shock parameter Z along nozzle axis for the final design cycle.
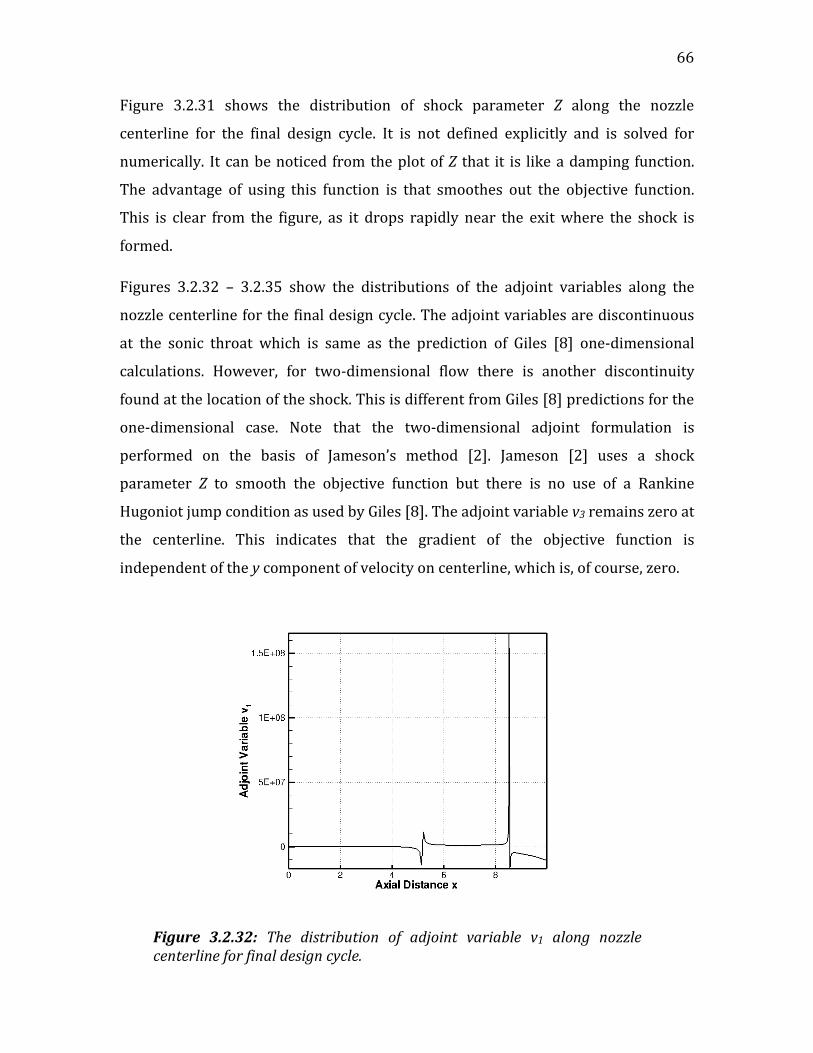
66
Figure 3.2.31 shows the distribution of shock parameter Z along the nozzle
centerline for the final design cycle. It is not defined explicitly and is solved for
numerically. It can be noticed from the plot of Z that it is like a damping function.
The advantage of using this function is that smoothes out the objective function.
This is clear from the figure, as it drops rapidly near the exit where the shock is
formed.
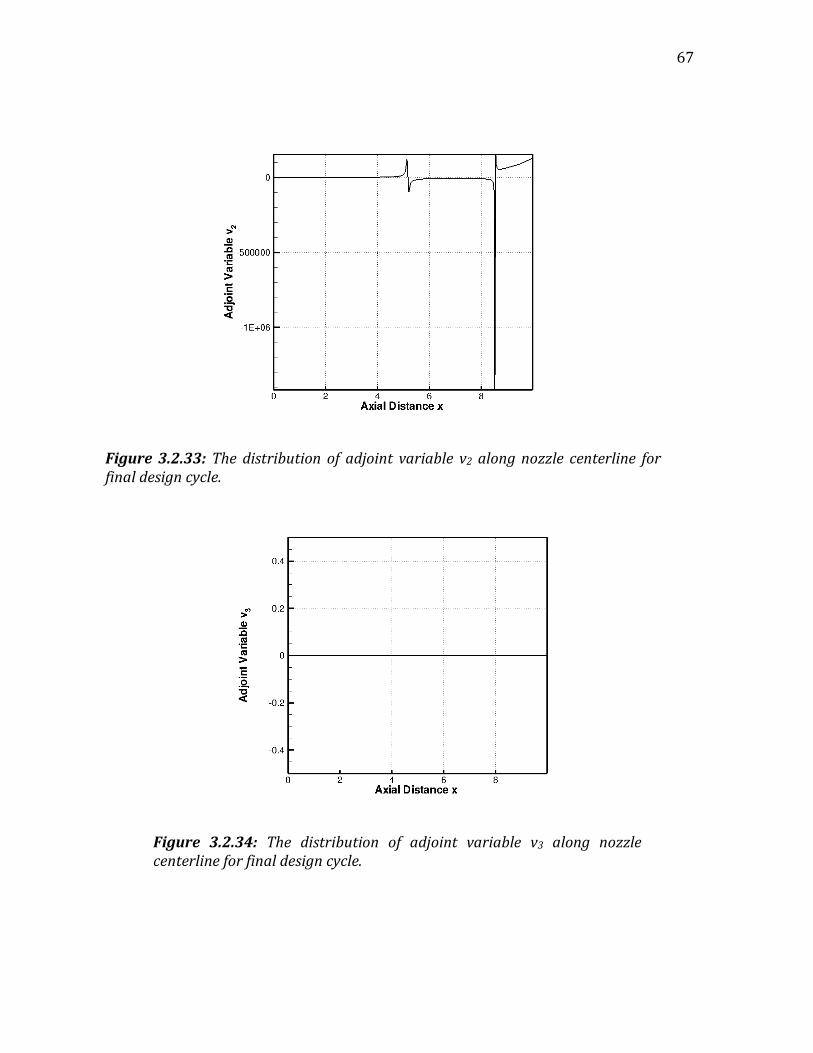
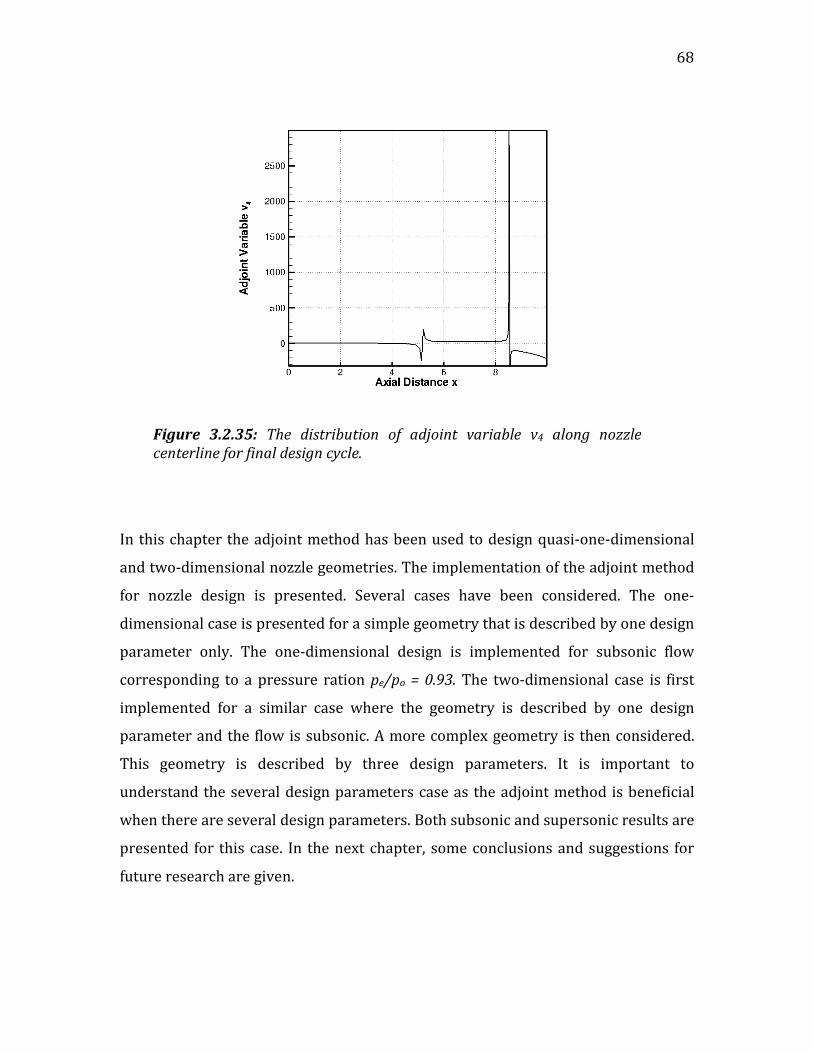
Figures 3.2.32 – 3.2.35 show the distributions of the adjoint variables along the
nozzle centerline for the final design cycle. The adjoint variables are discontinuous
at the sonic throat which is same as the prediction of Giles [8] one-dimensional
calculations. However, for two-dimensional flow there is another discontinuity
found at the location of the shock. This is different from Giles [8] predictions for the
one-dimensional case. Note that the two-dimensional adjoint formulation is
performed on the basis of Jameson’s method [2]. Jameson [2] uses a shock
parameter Z to smooth the objective function but there is no use of a Rankine
Hugoniot jump condition as used by Giles [8]. The adjoint variable v3 remains zero at
the centerline. This indicates that the gradient of the objective function is
independent of the y component of velocity on centerline, which is, of course, zero.
Figure 3.2.32: The distribution of adjoint variable v1 along nozzle centerline for final design cycle.
67
Figure 3.2.34: The distribution of adjoint variable v3 along nozzle centerline for final design cycle.
Figure 3.2.33: The distribution of adjoint variable v2 along nozzle centerline for final design cycle.
68
In this chapter the adjoint method has been used to design quasi-one-dimensional
and two-dimensional nozzle geometries. The implementation of the adjoint method
for nozzle design is presented. Several cases have been considered. The one-
dimensional case is presented for a simple geometry that is described by one design
parameter only. The one-dimensional design is implemented for subsonic flow
corresponding to a pressure ration pe/po = 0.93. The two-dimensional case is first
implemented for a similar case where the geometry is described by one design
parameter and the flow is subsonic. A more complex geometry is then considered.
This geometry is described by three design parameters. It is important to
understand the several design parameters case as the adjoint method is beneficial
when there are several design parameters. Both subsonic and supersonic results are
presented for this case. In the next chapter, some conclusions and suggestions for
future research are given.
Figure 3.2.35: The distribution of adjoint variable v4 along nozzle centerline for final design cycle.

69
Chapter4: Conclusion and Future Work
Adjoint methods have been shown to be very efficient methods of optimization in
terms of saving computational cost. In this thesis, adjoint methods have been
developed for quasi-one-dimensional and two-dimensional nozzle flows. The aim is
to find a geometry that has an optimum value corresponding to a desired cost
function. The cost function, in this thesis, has been considered as the difference of
the pressure distribution from a desired pressure distribution on the nozzle axis.
The adjoint variables are used to find the sensitivity of the cost function with
respect to the design parameters. First, a quasi-one-dimensional case is considered
to explain the method. Then more complicated two-dimensional cases are
considered. The two-dimensional cases have been demonstrated for a one design
parameter case for understanding purposes and then a several design parameters
two-dimensional case has been considered. The nozzle operating conditions include
both subsonic and supersonic cases. In the supersonic case, when there is a shock
present in the nozzle, the cost function has been smoothed. Even though the cost
function has been smoothed for the supersonic case, the adjoint variables are
observed to be discontinuous at the sonic throat and at the location of the shock.
The number of design cycles required to achieve the desired pressure distribution
varies with the type of problem (subsonic, supersonic), and type of governing
equations (quasi-one-dimensional, two-dimensional). The adjoint equation is
similar to the flow equation. Hence its solution takes approximately the same
computational effort as the flow equation. Traditional methods of computing the
cost function sensitivity require much more computational effort with a new flow
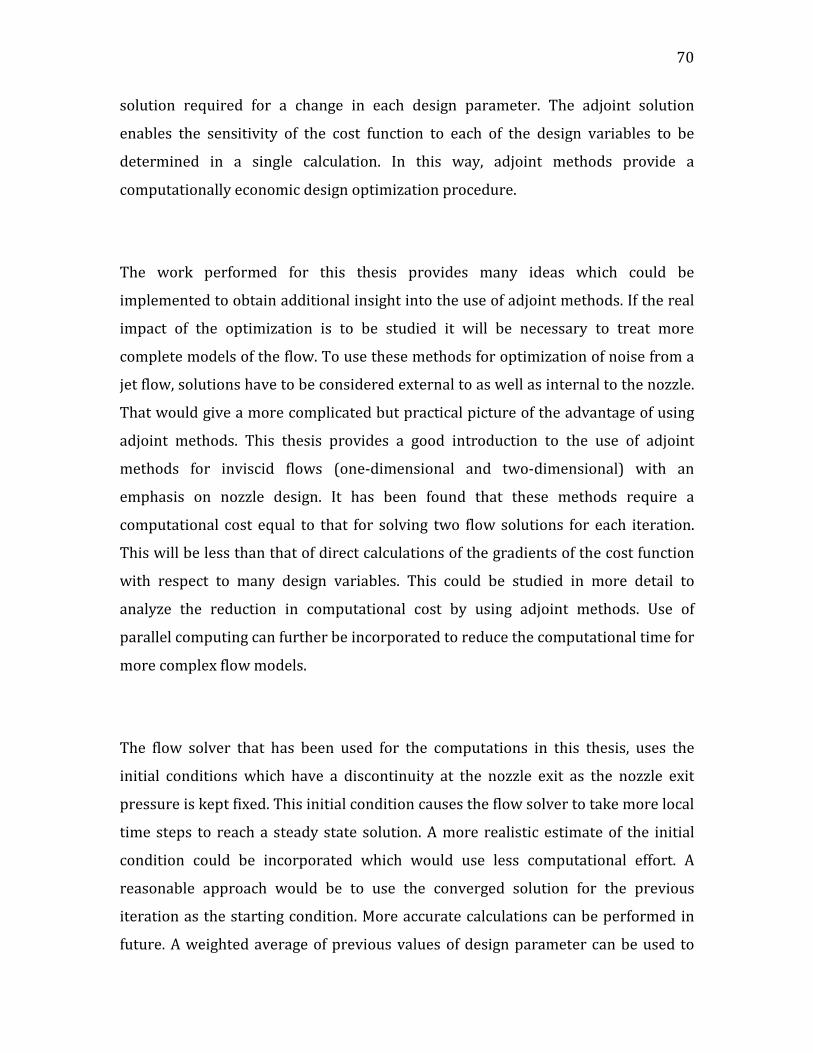
70
solution required for a change in each design parameter. The adjoint solution
enables the sensitivity of the cost function to each of the design variables to be
determined in a single calculation. In this way, adjoint methods provide a
computationally economic design optimization procedure.
The work performed for this thesis provides many ideas which could be
implemented to obtain additional insight into the use of adjoint methods. If the real
impact of the optimization is to be studied it will be necessary to treat more
complete models of the flow. To use these methods for optimization of noise from a
jet flow, solutions have to be considered external to as well as internal to the nozzle.
That would give a more complicated but practical picture of the advantage of using
adjoint methods. This thesis provides a good introduction to the use of adjoint
methods for inviscid flows (one-dimensional and two-dimensional) with an
emphasis on nozzle design. It has been found that these methods require a
computational cost equal to that for solving two flow solutions for each iteration.
This will be less than that of direct calculations of the gradients of the cost function
with respect to many design variables. This could be studied in more detail to
analyze the reduction in computational cost by using adjoint methods. Use of
parallel computing can further be incorporated to reduce the computational time for
more complex flow models.
The flow solver that has been used for the computations in this thesis, uses the
initial conditions which have a discontinuity at the nozzle exit as the nozzle exit
pressure is kept fixed. This initial condition causes the flow solver to take more local
time steps to reach a steady state solution. A more realistic estimate of the initial
condition could be incorporated which would use less computational effort. A
reasonable approach would be to use the converged solution for the previous
iteration as the starting condition. More accurate calculations can be performed in
future. A weighted average of previous values of design parameter can be used to

71
calculate the next value of design parameter. Different geometries and different
numbers of the design parameters can be studied to obtain a better indication of the
benefits of the method. It would also help in understanding the limitations of the
method. A two-dimensional nozzle has been considered in this thesis for most of
the calculations. However, to examine more practical cases an axisymmetric nozzle
could be considered and use of the adjoint method could be applied to that case.
72
References
1. “Aerodynamic design via control theory” Jameson, A., J. Sci. Comput.3 (1988)
233-260.
2. “Optimum Aerodynamic design using CFD and control theory” Jameson, A., AIAA95-1729-CP (1995).
3. “Optimum aerodynamic design using control theory” Jameson, A., In: Hafez, M. and Oshima, K. (eds), Computational Fluid Dynamics Review, Annual Book Series. John Wiley & Sons, New York (1995) pp. 495-528.
4. “Optimum aerodynamic design using Navier-Stokes equations” Jameson, A., Pierce, N.A. and Martinelli, L., AIAA Paper 97-0101 (1997).
5. “Control based airfoil design using the Euler equations” Reuther, J., and Jameson, A., AIAA Paper 94-4272-CP (1994).
6. “Aerodynamic shape optimization of complex aircraft configurations via an adjoint formulation” Reuther, J., Jameson, A., Farmer, J., Martinelli, L., and Saunders, D., AIAA Paper 96-0094 (1996).
7. “An Introduction to the Adjoint Approach to Design” M. B. Giles and N. A. Pierce, Flow, Turbulence and combustion 65: 393-415, (2000).
8. “Analytic adjoint solutions for the quasi-one-dimensional Euler equations” M. B. Giles and N. A. Pierce, J. Fluid Mechanics (2001), vol. 426, pp. 327-345.
9. “On the Properties of Solutions of the Adjoint Euler Equations” M. B. Giles and N. A. Pierce
10. “The noise from shock waves in supersonic jets” Harper-Bourne, M. and Fisher, M.J., AGARD-CP-131 11:1-13 (1974).
11. “Stochastic model theory of broadband shock associated noise from supersonic jets,” Tam, C.K.W., J. Sound Vib 116, 265-302 (1987).
12. “Optimal Control of Systems Governed by Partial Differential Equations”
Lions, J.L., Springer- Verlag, Berlin (1971). Translated by S.K. Mitter.

73
13. “On optimum design in fluid mechanics” Pironneau O., J. Fluid Mech. 64
(1974) 97–110.
14. “Adjoint operator approach to shape design for internal incompressible flow” Cabuk, H., Shung, C.H. and Modi, V., In: Dulikravich, G.S. (ed.), Proceedings 3rd International Conference on Inverse Design and Optimization in Engineering Sciences (1991) pp. 391–404.
15. “Sensitivity analysis, approximate analysis and design optimization for internal and external viscous flows” Korivi, V.M., Taylor III, A.C. and Hou, G.W., AIAA Paper 91-3083 (1991).
16. “Aerodynamics design and optimization in one shot” Ta’asan, S., Kuruvila, G.
and Salas, M.D., AIAA Paper 92-0025 (1992).
17. “Aerodynamic design optimization using sensitivity analysis and computational fluid dynamics” Baysal, O. and Eleshaky, M.E., AIAA J. 30(3) (1992) 718–725.
18. “Practical design and optimization in computational fluid dynamics”
Huffman, W.P., Melvin, R.G., Young, D.P., Johnson, F.T., Bussoletti, J.E., Bieterman, M.B. and Himes, C.L., AIAA Paper 93-3111 (1993).
19. “Airfoil design via control theory using the full-potential and Euler
equations” Lewis, J. and Agarwal, R., The Forum on CFD for Design and Optimization (IMECE 95), San Francisco, CA (1995).
20. “Aerodynamic design optimization on unstructured grids with a continuous adjoint formulation” Anderson, W.K. and Venkatakrishnan, V., AIAA Paper 97-0643 (1997).
21. “CFD design problems using progressive optimization” Dadone, A. and
Grossman, B., AIAA Paper 99-3295 (1999).
22. “Overview of sensitivity analysis and shape optimization for complex aerodynamic configurations” Newman III, J.C., Taylor III, A.C., Barnwell, R.W., Newman, P.A. and Hou, G.J.-W., J. Aircraft 36(1) (1999) 87–96.
23. “Aerodynamic optimization based on the Euler and Navier–Stokes equations using unstructured grids” Elliott, J., Ph.D. Thesis, MIT, Department of Aeronautics and Astronomy (1998).
24. “Aerodynamic design optimization on unstructured meshes using the Navier–Stokes equations” Nielsen, E. and Anderson, W.K., AIAA Paper 98-

74
4809 (1998).
25. “Airfoil design on unstructured grids for turbulent flows” Anderson, W.K. and Bonhaus, D.L., AIAA J. 37(2) (1999) 185–191.
26. “Optimal shape design, reverse mode of automatic differentiation and turbulence” Mohammadi, B., AIAA Paper 97-0099 (1997).
27. “Computational Fluid Dynamics: The basics with applications” Anderson J.
D., McGraw Hill international editions.

75
Nomenclature
U = flow properties vector
u = perturbation in flow properties
p = pressure
q = one-dimensional velocity
ρ = density
E = energy
H = enthalpy
h = nozzle half height (one-dimensional)
˜ h = perturbation in h
pd = desired pressure
v = adjoint variable
Jc = jacobian
ξ,η( ) = transformed coordinates
α = design parameter
J = objective function
I = sensitivity of objective function with respect to design parameter
Z = shock parameter
Cx, Cy = coefficients of artificial dissipation


















