
The Stanford Systems Optimization Laboratory (SOL): Some...
63
Transcript of The Stanford Systems Optimization Laboratory (SOL): Some...
SOLIterative Solvers
Optimization SolversAerospace Applications
The Stanford Systems Optimization Laboratory (SOL):Some Applications of our Large-scale Optimization
Software
Michael Saunders
Management Science and Engineering (MS&E)Institute for Computational and Mathematical Engineering (iCME)
Stanford University
Optimization Day � Research and ApplicationsMechanical Engineering, Thermal and Fluid Sciences
A�liates and Sponsors ProgramStanford University, Feb 1, 2011
Michael Saunders SOL Optimization Software 1/31 1/31

SOLIterative Solvers
Optimization SolversAerospace Applications
SOL Origins
SOL
Systems Optimization Lab
Michael Saunders SOL Optimization Software 2/31 2/31
SOLIterative Solvers
Optimization SolversAerospace Applications
SOL Origins
Models, Algorithms, Software
George Dantzig1974�1988 PILOT energy-economic model
Linear program
Alan Manne1976 ETAMACRO energy model
nonlinear objective1996�2006 MERGE greenhouse-gas model
nonlinear objective and constraints
Ideal test problems for our optimization solvers
Murtagh and Saunders MINOS LP/NLP
Gill, Murray, and Saunders SQOPT, SNOPT QP, NLP
Infanger DECIS Stochastic LP
Part of modeling systems GAMS and AMPL (also TOMLAB)
Michael Saunders SOL Optimization Software 3/31 3/31
SOLIterative Solvers
Optimization SolversAerospace Applications
SOL Origins
Models, Algorithms, Software
George Dantzig1974�1988 PILOT energy-economic model
Linear program
Alan Manne1976 ETAMACRO energy model
nonlinear objective1996�2006 MERGE greenhouse-gas model
nonlinear objective and constraints
Ideal test problems for our optimization solvers
Murtagh and Saunders MINOS LP/NLP
Gill, Murray, and Saunders SQOPT, SNOPT QP, NLP
Infanger DECIS Stochastic LP
Part of modeling systems GAMS and AMPL (also TOMLAB)
Michael Saunders SOL Optimization Software 3/31 3/31

SOLIterative Solvers
Optimization SolversAerospace Applications
SOL Origins
Models, Algorithms, Software
George Dantzig1974�1988 PILOT energy-economic model
Linear program
Alan Manne1976 ETAMACRO energy model
nonlinear objective1996�2006 MERGE greenhouse-gas model
nonlinear objective and constraints
Ideal test problems for our optimization solvers
Murtagh and Saunders MINOS LP/NLP
Gill, Murray, and Saunders SQOPT, SNOPT QP, NLP
Infanger DECIS Stochastic LP
Part of modeling systems GAMS and AMPL (also TOMLAB)
Michael Saunders SOL Optimization Software 3/31 3/31
SOLIterative Solvers
Optimization SolversAerospace Applications
SOL Origins
Models, Algorithms, Software
George Dantzig1974�1988 PILOT energy-economic model
Linear program
Alan Manne1976 ETAMACRO energy model
nonlinear objective1996�2006 MERGE greenhouse-gas model
nonlinear objective and constraints
Ideal test problems for our optimization solvers
Murtagh and Saunders MINOS LP/NLP
Gill, Murray, and Saunders SQOPT, SNOPT QP, NLP
Infanger DECIS Stochastic LP
Part of modeling systems GAMS and AMPL (also TOMLAB)
Michael Saunders SOL Optimization Software 3/31 3/31

SOLIterative Solvers
Optimization SolversAerospace Applications
SOL Origins
Models, Algorithms, Software
George Dantzig1974�1988 PILOT energy-economic model
Linear program
Alan Manne1976 ETAMACRO energy model
nonlinear objective1996�2006 MERGE greenhouse-gas model
nonlinear objective and constraints
Ideal test problems for our optimization solvers
Murtagh and Saunders MINOS LP/NLP
Gill, Murray, and Saunders SQOPT, SNOPT QP, NLP
Infanger DECIS Stochastic LP
Part of modeling systems GAMS and AMPL (also TOMLAB)
Michael Saunders SOL Optimization Software 3/31 3/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
Iterative Solvers for
Ax = b min ‖Ax− b‖
http://www.stanford.edu/group/SOL/software.html
Michael Saunders SOL Optimization Software 4/31 4/31
SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
CG-type solvers for symmetric Ax = b
Krylov subspace Kk(A, b) = range{b, Ab, . . . , Ak−1b}Lanczos process generates Vk =
[v1 v2 . . . vk
]∈ Kk
using products Avj
kth approximation xk = Vkyk for some yk
Choose yk to minimize something
CG min 12xT
k Axk − bT xk (A posdef)SYMMLQ min ‖ek‖ error ek = x− xk
MINRES min ‖rk‖ residual rk = b−Axk
MINRES-QLP min ‖rk‖ for singular incompatible Ax ≈ b
Paige, Saunders, Choi
Michael Saunders SOL Optimization Software 5/31 5/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
CG-type solvers for symmetric Ax = b
Krylov subspace Kk(A, b) = range{b, Ab, . . . , Ak−1b}Lanczos process generates Vk =
[v1 v2 . . . vk
]∈ Kk
using products Avj
kth approximation xk = Vkyk for some yk
Choose yk to minimize something
CG min 12xT
k Axk − bT xk (A posdef)SYMMLQ min ‖ek‖ error ek = x− xk
MINRES min ‖rk‖ residual rk = b−Axk
MINRES-QLP min ‖rk‖ for singular incompatible Ax ≈ b
Paige, Saunders, Choi
Michael Saunders SOL Optimization Software 5/31 5/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
CG-type solvers for symmetric Ax = b
Krylov subspace Kk(A, b) = range{b, Ab, . . . , Ak−1b}Lanczos process generates Vk =
[v1 v2 . . . vk
]∈ Kk
using products Avj
kth approximation xk = Vkyk for some yk
Choose yk to minimize something
CG min 12xT
k Axk − bT xk (A posdef)SYMMLQ min ‖ek‖ error ek = x− xk
MINRES min ‖rk‖ residual rk = b−Axk
MINRES-QLP min ‖rk‖ for singular incompatible Ax ≈ b
Paige, Saunders, Choi
Michael Saunders SOL Optimization Software 5/31 5/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
CG-type solvers for min ‖Ax− b‖
Golub-Kahan process generates Uk =[u1 u2 . . . uk
],
Vk =[v1 v2 . . . vk
]using products Avj , ATuj
kth approximation xk = Vkyk for some yk
Choose yk to minimize something
LSQR min ‖rk‖ residual rk = b−Axk
LSMR min ‖ATrk‖ residual for ATAx = AT b
Paige, SaundersDavid Fong, iCME
Jon Claerbout, Geophysics
Michael Saunders SOL Optimization Software 6/31 6/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
CG-type solvers for min ‖Ax− b‖
Golub-Kahan process generates Uk =[u1 u2 . . . uk
],
Vk =[v1 v2 . . . vk
]using products Avj , ATuj
kth approximation xk = Vkyk for some yk
Choose yk to minimize something
LSQR min ‖rk‖ residual rk = b−Axk
LSMR min ‖ATrk‖ residual for ATAx = AT b
Paige, SaundersDavid Fong, iCME
Jon Claerbout, Geophysics
Michael Saunders SOL Optimization Software 6/31 6/31
SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
CG-type solvers for min ‖Ax− b‖
Golub-Kahan process generates Uk =[u1 u2 . . . uk
],
Vk =[v1 v2 . . . vk
]using products Avj , ATuj
kth approximation xk = Vkyk for some yk
Choose yk to minimize something
LSQR min ‖rk‖ residual rk = b−Axk
LSMR min ‖ATrk‖ residual for ATAx = AT b
Paige, SaundersDavid Fong, iCME
Jon Claerbout, Geophysics
Michael Saunders SOL Optimization Software 6/31 6/31
SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
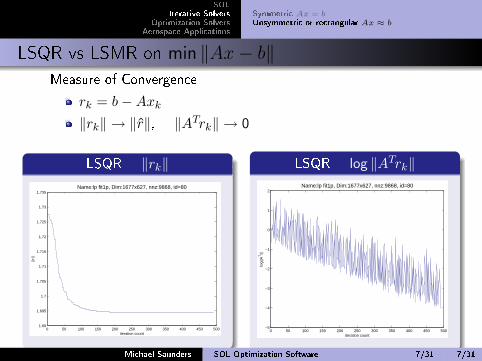
LSQR vs LSMR on min ‖Ax− b‖Measure of Convergence
rk = b−Axk
‖rk‖ → ‖r̂‖, ‖ATrk‖ → 0
� LSQR� LSMR
LSQR ‖rk‖
0 50 100 150 200 250 300 350 400 450 5001.69
1.695
1.7
1.705
1.71
1.715
1.72
1.725
1.73
1.735Name:lp fit1p, Dim:1677x627, nnz:9868, id=80
iteration count
||r||
LSQR log ‖ATrk‖
0 50 100 150 200 250 300 350 400 450 500−5
−4
−3
−2
−1
0
1
2Name:lp fit1p, Dim:1677x627, nnz:9868, id=80
iteration count
log|
|ATr|
|
Michael Saunders SOL Optimization Software 7/31 7/31
SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
LSQR vs LSMR on min ‖Ax− b‖Measure of Convergence
rk = b−Axk
‖rk‖ → ‖r̂‖, ‖ATrk‖ → 0
� LSQR� LSMR
LSQR ‖rk‖
0 50 100 150 200 250 300 350 400 450 5001.69
1.695
1.7
1.705
1.71
1.715
1.72
1.725
1.73
1.735Name:lp fit1p, Dim:1677x627, nnz:9868, id=80
iteration count
||r||
LSQR log ‖ATrk‖
0 50 100 150 200 250 300 350 400 450 500−5
−4
−3
−2
−1
0
1
2Name:lp fit1p, Dim:1677x627, nnz:9868, id=80
iteration count
log|
|ATr|
|
Michael Saunders SOL Optimization Software 7/31 7/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
LSQR vs LSMR on min ‖Ax− b‖Measure of Convergence
rk = b−Axk
‖rk‖ → ‖r̂‖, ‖ATrk‖ → 0
� LSQR� LSMR
‖rk‖
0 50 100 150 200 250 300 350 400 450 50049
49.5
50
50.5
51
51.5
52
52.5
53
53.5
iteration count
||r||
Name:lp fit1p, Dim:1677x627, nnz:9868, id=80
LSQRLSMR
log ‖ATrk‖
0 50 100 150 200 250 300 350 400 450 500−5
−4
−3
−2
−1
0
1
2
iteration count
log|
|ATr|
|
Name:lp fit1p, Dim:1677x627, nnz:9868, id=80
LSQRLSMR
Michael Saunders SOL Optimization Software 7/31 7/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Symmetric Ax = bUnsymmetric or rectangular Ax ≈ b
log10‖ATrk‖‖rk‖ for LSQR and LSMR � typical
0 100 200 300 400 500 600 700 800 900 1000−6
−5
−4
−3
−2
−1
0
iteration count
log(
E2)
Name:lp pilot ja, Dim:2267x940, nnz:14977, id=88
LSQRLSMR
Michael Saunders SOL Optimization Software 8/31 8/31
SOLIterative Solvers
Optimization SolversAerospace Applications
Active-set solversInterior-point solver
Optimization Solvers
Michael Saunders SOL Optimization Software 9/31 9/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Active-set solversInterior-point solver
Active-set solvers for LP, NLP
minx
ϕ(x) st ` ≤
xAxc(x)
≤ u
MINOS Sparse LP, NLPLSSOL Dense constrained least-squaresNPSOL Dense NLPQPOPT Dense QPSQOPT Sparse QP also QPBLUR, Chris Maes, iCME
SNOPT Sparse NLP Philip Gill, UCSD
Michael Saunders SOL Optimization Software 10/31 10/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Active-set solversInterior-point solver
PDCO: An optimizer for convex objectives
Nominally:min
xϕ(x) st Ax = b, x ≥ 0
where A may be a sparse matrix or an operator
More useful:
minx, r
ϕ(x) + 12‖D1x‖2 + 1
2‖r‖2
Ax + D2r = b, ` ≤ x ≤ u,
where D1 and D2 are posdef diagonal matrices
Regularized LP, QP, . . .
Basis Pursuit DeNoising David Donoho
LP feasibility (D2 = I) Jon Dattorro
NMR analysis Zeev Wiesman, Ofer Levi
Michael Saunders SOL Optimization Software 11/31 11/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Active-set solversInterior-point solver
PDCO: An optimizer for convex objectives
Nominally:min
xϕ(x) st Ax = b, x ≥ 0
where A may be a sparse matrix or an operator
More useful:
minx, r
ϕ(x) + 12‖D1x‖2 + 1
2‖r‖2
Ax + D2r = b, ` ≤ x ≤ u,
where D1 and D2 are posdef diagonal matrices
Regularized LP, QP, . . .
Basis Pursuit DeNoising David Donoho
LP feasibility (D2 = I) Jon Dattorro
NMR analysis Zeev Wiesman, Ofer Levi
Michael Saunders SOL Optimization Software 11/31 11/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Active-set solversInterior-point solver
PDCO: An optimizer for convex objectives
Nominally:min
xϕ(x) st Ax = b, x ≥ 0
where A may be a sparse matrix or an operator
More useful:
minx, r
ϕ(x) + 12‖D1x‖2 + 1
2‖r‖2
Ax + D2r = b, ` ≤ x ≤ u,
where D1 and D2 are posdef diagonal matrices
Regularized LP, QP, . . .
Basis Pursuit DeNoising David Donoho
LP feasibility (D2 = I) Jon Dattorro
NMR analysis Zeev Wiesman, Ofer Levi
Michael Saunders SOL Optimization Software 11/31 11/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Active-set solversInterior-point solver
PDCO: An optimizer for convex objectives
Nominally:min
xϕ(x) st Ax = b, x ≥ 0
where A may be a sparse matrix or an operator
More useful:
minx, r
ϕ(x) + 12‖D1x‖2 + 1
2‖r‖2
Ax + D2r = b, ` ≤ x ≤ u,
where D1 and D2 are posdef diagonal matrices
Regularized LP, QP, . . .
Basis Pursuit DeNoising David Donoho
LP feasibility (D2 = I) Jon Dattorro
NMR analysis Zeev Wiesman, Ofer Levi
Michael Saunders SOL Optimization Software 11/31 11/31

SOLIterative Solvers
Optimization SolversAerospace Applications
Active-set solversInterior-point solver
PDCO: An optimizer for convex objectives
Nominally:min
xϕ(x) st Ax = b, x ≥ 0
where A may be a sparse matrix or an operator
More useful:
minx, r
ϕ(x) + 12‖D1x‖2 + 1
2‖r‖2
Ax + D2r = b, ` ≤ x ≤ u,
where D1 and D2 are posdef diagonal matrices
Regularized LP, QP, . . .
Basis Pursuit DeNoising David Donoho
LP feasibility (D2 = I) Jon Dattorro
NMR analysis Zeev Wiesman, Ofer Levi
Michael Saunders SOL Optimization Software 11/31 11/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Aerospace Applications
Michael Saunders SOL Optimization Software 12/31 12/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
NASA Aerospace Applications
David Saunders1970 Visit Stanford for 1 month (now 40 years)1974�present NASA Ames
ProjectsOAW Oblique All-Wing supersonic airlinerHSCT Supersonic airlinerCTV SHARP shuttle designCEV Apollo-type capsule to ISS, moon
Michael Saunders SOL Optimization Software 13/31 13/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
NASA Aerospace Applications
David Saunders1970 Visit Stanford for 1 month (now 40 years)1974�present NASA Ames
ProjectsOAW Oblique All-Wing supersonic airlinerHSCT Supersonic airlinerCTV SHARP shuttle designCEV Apollo-type capsule to ISS, moon
Michael Saunders SOL Optimization Software 13/31 13/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
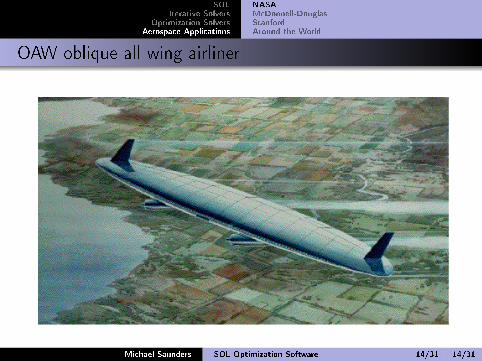
OAW oblique all wing airliner
Michael Saunders SOL Optimization Software 14/31 14/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
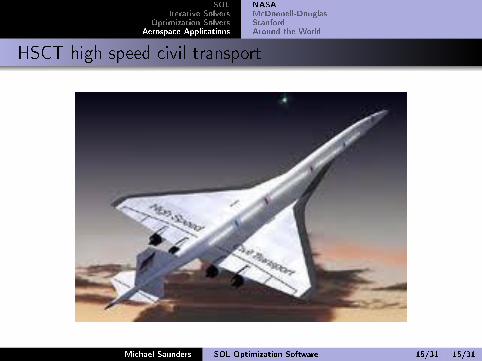
HSCT high speed civil transport
Michael Saunders SOL Optimization Software 15/31 15/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
CTV crew transfer vehicle
SHARP design (Slender Hypervelocity Aerothermodynamic Research Probes)Aerothermal performance constraint in (Velocity, Altitude) space, used during trajectory optimization
with UHTC materials (Ultra High Temperature Ceramics) to avoid exceeding material limits
Trajectory optimization with SNOPT
Could always abort to Kennedy, Boston, Gander, or Shannon
4000-mile cross-range capability during reentry
Image credit: David Kinney, NASA Ames Research Center
Michael Saunders SOL Optimization Software 16/31 16/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
CTV crew transfer vehicle
SHARP design (Slender Hypervelocity Aerothermodynamic Research Probes)Aerothermal performance constraint in (Velocity, Altitude) space, used during trajectory optimization
with UHTC materials (Ultra High Temperature Ceramics) to avoid exceeding material limits
Trajectory optimization with SNOPT
Could always abort to Kennedy, Boston, Gander, or Shannon
4000-mile cross-range capability during reentry
Image credit: David Kinney, NASA Ames Research Center
Michael Saunders SOL Optimization Software 16/31 16/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
CEV crew exploration vehicle
Tried shape optimization of heat shield and shoulder curvature(but the Apollo folk were pretty close already)
Michael Saunders SOL Optimization Software 17/31 17/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
McDonnell-Douglas Aerospace Applications
Philip Gill, Rocky Nelson1979�1988 SOL QPSOL, LSSOL, NPSOL1988�2007 UC San Diego QPOPT, SQOPT, SNOPTMcDonnell-Douglas Space Systems, LA (now Boeing)
ProjectsF-4 Minimum time-to-climb
DC-Y SSTO Minimum-fuel landing maneuver
Michael Saunders SOL Optimization Software 18/31 18/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
McDonnell-Douglas Aerospace Applications
Philip Gill, Rocky Nelson1979�1988 SOL QPSOL, LSSOL, NPSOL1988�2007 UC San Diego QPOPT, SQOPT, SNOPTMcDonnell-Douglas Space Systems, LA (now Boeing)
ProjectsF-4 Minimum time-to-climb
DC-Y SSTO Minimum-fuel landing maneuver
Michael Saunders SOL Optimization Software 18/31 18/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Michael Saunders SOL Optimization Software 19/31 19/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
DC-Y single-stage-to-orbit
Michael Saunders SOL Optimization Software 20/31 20/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Michael Saunders SOL Optimization Software 21/31 21/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Michael Saunders SOL Optimization Software 22/31 22/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
DC-Y landing, 2nd OTIS/NPSOL optimization
1st optimization: starting altitude = 2800ft
2nd optimization: starting altitude = variable
New constraint needed:
Don't exceed 3g
Optimum starting altitude = 1400ft(!)
Come back Alan Shephard!
Michael Saunders SOL Optimization Software 23/31 23/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
DC-Y landing, 2nd OTIS/NPSOL optimization
1st optimization: starting altitude = 2800ft
2nd optimization: starting altitude = variable
New constraint needed:
Don't exceed 3g
Optimum starting altitude = 1400ft(!)
Come back Alan Shephard!
Michael Saunders SOL Optimization Software 23/31 23/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
DC-Y landing, 2nd OTIS/NPSOL optimization
1st optimization: starting altitude = 2800ft
2nd optimization: starting altitude = variable
New constraint needed:
Don't exceed 3g
Optimum starting altitude = 1400ft(!)
Come back Alan Shephard!
Michael Saunders SOL Optimization Software 23/31 23/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
DC-Y landing, 2nd OTIS/NPSOL optimization
1st optimization: starting altitude = 2800ft
2nd optimization: starting altitude = variable
New constraint needed: Don't exceed 3g
Optimum starting altitude = 1400ft(!)
Come back Alan Shephard!
Michael Saunders SOL Optimization Software 23/31 23/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
DC-Y landing, 2nd OTIS/NPSOL optimization
1st optimization: starting altitude = 2800ft
2nd optimization: starting altitude = variable
New constraint needed: Don't exceed 3g
Optimum starting altitude = 1400ft(!)
Come back Alan Shephard!
Michael Saunders SOL Optimization Software 23/31 23/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
DC-Y landing, 2nd OTIS/NPSOL optimization
1st optimization: starting altitude = 2800ft
2nd optimization: starting altitude = variable
New constraint needed: Don't exceed 3g
Optimum starting altitude = 1400ft(!)
Come back Alan Shephard!
Michael Saunders SOL Optimization Software 23/31 23/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Stanford Aerospace Applications
Ilan Kroo Aircraft Aerodynamics and Design Group
Antony Jameson Aerospace Computing Lab
Juan Alonso Aerospace Design Lab
MDO Multidisciplinary Design Optimization
ASO Aerodynamic Shape Optimization
. . .
Numerous completed projectsOAW Oblique All-Wing supersonic airliner
Blended Wing-Body Transonic airliner
. . .
Michael Saunders SOL Optimization Software 24/31 24/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Stanford Aerospace Applications
Ilan Kroo Aircraft Aerodynamics and Design Group
Antony Jameson Aerospace Computing Lab
Juan Alonso Aerospace Design Lab
MDO Multidisciplinary Design Optimization
ASO Aerodynamic Shape Optimization
. . .
Numerous completed projectsOAW Oblique All-Wing supersonic airliner
Blended Wing-Body Transonic airliner
. . .
Michael Saunders SOL Optimization Software 24/31 24/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Blended wing airliner
Michael Saunders SOL Optimization Software 25/31 25/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Blended wing airliner
Ilan Kroo, Michael Holden Aero/Astro, Stanford, 1999
Compute controls for stable �ight of 17ft-span �ying modelModel trajectory of �exible body over time
Minimize wing weight (or move CG aft as far as possible)subject to �utter constraints
9000 nonlinear eqns, 9000 state variables, 7 design variables400,000 gradients in the Jacobian (sparse �nite di�erences)
MINOS 1999: 26 major iterations, 4000 minor iterations1500 function and Jacobian evaluations, 3 days on SGI Octane
SNOPT today: Probably 3 hours (or much less)
Michael Saunders SOL Optimization Software 26/31 26/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Blended wing airliner
Ilan Kroo, Michael Holden Aero/Astro, Stanford, 1999
Compute controls for stable �ight of 17ft-span �ying modelModel trajectory of �exible body over time
Minimize wing weight (or move CG aft as far as possible)subject to �utter constraints
9000 nonlinear eqns, 9000 state variables, 7 design variables400,000 gradients in the Jacobian (sparse �nite di�erences)
MINOS 1999: 26 major iterations, 4000 minor iterations1500 function and Jacobian evaluations, 3 days on SGI Octane
SNOPT today: Probably 3 hours (or much less)
Michael Saunders SOL Optimization Software 26/31 26/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Blended wing airliner
Ilan Kroo, Michael Holden Aero/Astro, Stanford, 1999
Compute controls for stable �ight of 17ft-span �ying modelModel trajectory of �exible body over time
Minimize wing weight (or move CG aft as far as possible)subject to �utter constraints
9000 nonlinear eqns, 9000 state variables, 7 design variables400,000 gradients in the Jacobian (sparse �nite di�erences)
MINOS 1999: 26 major iterations, 4000 minor iterations1500 function and Jacobian evaluations, 3 days on SGI Octane
SNOPT today: Probably 3 hours (or much less)
Michael Saunders SOL Optimization Software 26/31 26/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Blended wing airliner
Ilan Kroo, Michael Holden Aero/Astro, Stanford, 1999
Compute controls for stable �ight of 17ft-span �ying modelModel trajectory of �exible body over time
Minimize wing weight (or move CG aft as far as possible)subject to �utter constraints
9000 nonlinear eqns, 9000 state variables, 7 design variables400,000 gradients in the Jacobian (sparse �nite di�erences)
MINOS 1999: 26 major iterations, 4000 minor iterations1500 function and Jacobian evaluations, 3 days on SGI Octane
SNOPT today: Probably 3 hours (or much less)
Michael Saunders SOL Optimization Software 26/31 26/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Blended wing airliner
Ilan Kroo, Michael Holden Aero/Astro, Stanford, 1999
Compute controls for stable �ight of 17ft-span �ying modelModel trajectory of �exible body over time
Minimize wing weight (or move CG aft as far as possible)subject to �utter constraints
9000 nonlinear eqns, 9000 state variables, 7 design variables400,000 gradients in the Jacobian (sparse �nite di�erences)
MINOS 1999: 26 major iterations, 4000 minor iterations1500 function and Jacobian evaluations, 3 days on SGI Octane
SNOPT today: Probably 3 hours (or much less)
Michael Saunders SOL Optimization Software 26/31 26/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Blended wing airliner
Ilan Kroo, Michael Holden Aero/Astro, Stanford, 1999
Compute controls for stable �ight of 17ft-span �ying modelModel trajectory of �exible body over time
Minimize wing weight (or move CG aft as far as possible)subject to �utter constraints
9000 nonlinear eqns, 9000 state variables, 7 design variables400,000 gradients in the Jacobian (sparse �nite di�erences)
MINOS 1999: 26 major iterations, 4000 minor iterations1500 function and Jacobian evaluations, 3 days on SGI Octane
SNOPT today: Probably 3 hours (or much less)
Michael Saunders SOL Optimization Software 26/31 26/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Latest use of optimization
Conservative Meshless Scheme for Conservation LawsEdmond Chiu, Qiqi Wang and Antony Jameson
PDCO:
min ‖af‖
s.t.[Cf D
] [af
m
]= −Cpap, m > 0
LSQR:
min ‖af‖s.t. Cfaf = −Cpap −Dm
Michael Saunders SOL Optimization Software 27/31 27/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Geophysics at Stanford
Paul Segall, Dan Sinnett, Andrew BradleyGeophysical inverse problem:Determine the dislocation on a dike near Kilaueabased on GPS data
Least-squares matrix: half-space Green's functionsRegularization for smoothness of surface deformation
Kinematic consistency constraints on the dikeCertain slip components must be nonnegative
Apply SNOPT
Michael Saunders SOL Optimization Software 28/31 28/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Geophysics at Stanford
Paul Segall, Dan Sinnett, Andrew BradleyGeophysical inverse problem:Determine the dislocation on a dike near Kilaueabased on GPS data
Least-squares matrix: half-space Green's functionsRegularization for smoothness of surface deformation
Kinematic consistency constraints on the dikeCertain slip components must be nonnegative
Apply SNOPT
Michael Saunders SOL Optimization Software 28/31 28/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Geophysics at Stanford
Paul Segall, Dan Sinnett, Andrew BradleyGeophysical inverse problem:Determine the dislocation on a dike near Kilaueabased on GPS data
Least-squares matrix: half-space Green's functionsRegularization for smoothness of surface deformation
Kinematic consistency constraints on the dikeCertain slip components must be nonnegative
Apply SNOPT
Michael Saunders SOL Optimization Software 28/31 28/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Geophysics at Stanford
Paul Segall, Dan Sinnett, Andrew BradleyGeophysical inverse problem:Determine the dislocation on a dike near Kilaueabased on GPS data
Least-squares matrix: half-space Green's functionsRegularization for smoothness of surface deformation
Kinematic consistency constraints on the dikeCertain slip components must be nonnegative
Apply SNOPT
Michael Saunders SOL Optimization Software 28/31 28/31

SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
News Flash, 3 March 2007
Mike Ross Naval Postgraduate School, Monterey
DIDO: A package for solving optimal control problemsImplemented in MATLAB
Calls TOMLAB/SNOPT for the optimization
GMT 062:19:26The International Space Station was successfully maneuvered
using DIDO/TOMLAB/SNOPTFound zero-propellant solutions (globally optimal)Saved NASA $1M fuel cost
Michael Saunders SOL Optimization Software 29/31 29/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
News Flash, 3 March 2007
Mike Ross Naval Postgraduate School, Monterey
DIDO: A package for solving optimal control problemsImplemented in MATLAB
Calls TOMLAB/SNOPT for the optimization
GMT 062:19:26The International Space Station was successfully maneuvered
using DIDO/TOMLAB/SNOPTFound zero-propellant solutions (globally optimal)Saved NASA $1M fuel cost
Michael Saunders SOL Optimization Software 29/31 29/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
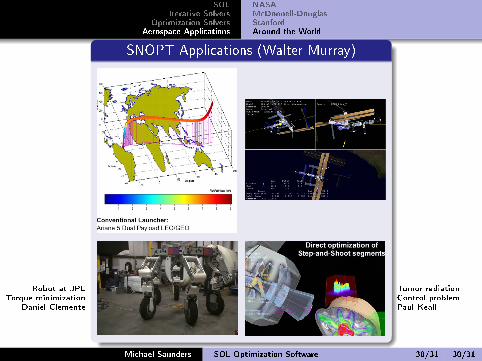
SNOPT Applications (Walter Murray)
Robot at JPLTorque minimization
Daniel Clemente
Tumor radiationControl problemPaul Keall
Michael Saunders SOL Optimization Software 30/31 30/31
SOLIterative Solvers
Optimization SolversAerospace Applications
NASAMcDonnell-DouglasStanfordAround the World
Michael Saunders SOL Optimization Software 31/31 31/31


















