The role of MHD turbulence in magnetic self-excitation in ...
145
THE ROLE OF MHD TURBULENCE IN MAGNETIC SELF-EXCITATION: A STUDY OF THE MADISON DYNAMO EXPERIMENT by Mark D. Nornberg A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Physics) at the UNIVERSITY OF WISCONSIN–MADISON 2006
Transcript of The role of MHD turbulence in magnetic self-excitation in ...

THE ROLE OF MHD TURBULENCE IN MAGNETIC SELF-EXCITATION:
A STUDY OF THE MADISON DYNAMO EXPERIMENT
by
Mark D. Nornberg
A dissertation submitted in partial fulfillment of
the requirements for the degree of
Doctor of Philosophy
(Physics)
at the
UNIVERSITY OF WISCONSIN–MADISON
2006

c© Copyright by Mark D. Nornberg 2006
All Rights Reserved

i
For my parents who supported me throughout college and for my wife who supported me
throughout graduate school. The rest of my life I dedicate to my daughter Margaret.

ii
ACKNOWLEDGMENTS
I would like to thank my adviser Cary Forest for his guidance and support in the completion
of this dissertation. His high expectations and persistence helped drive the work presented in
this thesis. I am indebted to him for the many opportunities he provided me to connect with the
world-wide dynamo community. I would also like to thank Roch Kendrick for leading the design,
construction, and operation of the experiment. He taught me how to do science using nothing but
duct tape, Sharpies, and Scotch-Brite. He also raised my appreciation for the artistry of engineer-
ing. My thanks also go to the many undergraduate students who assisted in the construction of the
experiment, especially Craig Jacobson who performed graduate-level work.
My research partner, Erik Spence, deserves particular thanks for his tireless efforts in modeling
the experiment. His persnickety emendations were especially appreciated as we entered the publi-
cation stage of the experiment. The conversations during our morning commute to the lab will be
sorely missed. I never imagined forging such a strong friendship with a colleague, and I hope our
families remain close despite great distance.
I would also like to thank Jim, Mike, and Julie for both moral support and epicurean sustenance.
I would never have endured the struggle of graduate school without the steadfast support of my
family. I will always be grateful for the education I received through the sacrifices of my parents.
My beautiful wife Julianne has been my comfort and encouragement throughout my graduate
career. She checked my discouragement with unwavering optimism and provided the hope that is
needed in accomplishing such an endeavor.

iii
It seems an almost incredible thing to me that an invention of the human intellect and the structure
of the universe coincide.
— Benedict XVI

iv
TABLE OF CONTENTS
Page
List of tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
List of figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 A brief history of the dynamo problem . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Dynamo experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Motivation for the experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Outline of the thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 The kinematic dynamo problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 The magnetic induction equation . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 The Bullard and Gellman formalism . . . . . . . . . . . . . . . . . . . . . . . . . 122.3 The kinematic eigenvalue problem . . . . . . . . . . . . . . . . . . . . . . . . . . 152.4 Simple roll flow dynamos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5 The stretch-twist-fold mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . 212.6 Comparison with simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.7 Anticipated effects of turbulence . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.7.1 Intermittent excitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.7.2 Mean-field dynamo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.7.3 Small-scale dynamo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3 Description of the sodium experiment . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.1 Industrial automation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.2 Holding tank . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3 Experimental vessel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.4 Expansion tank . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.5 Melt station . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.6 Pneumatic transfer system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42

v
Page
3.7 Magnetic sensors and data acquisition . . . . . . . . . . . . . . . . . . . . . . . . 433.8 External field coils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463.9 Safety equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.9.1 Protective clothing and gear . . . . . . . . . . . . . . . . . . . . . . . . . 473.9.2 Scrubber system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.9.3 Fume hood for small sodium fires and material tests . . . . . . . . . . . . 483.9.4 Sodium cleaning station . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4 Hydrodynamic experiments to model the flow . . . . . . . . . . . . . . . . . . . . . 50
4.1 Description of the water experiment . . . . . . . . . . . . . . . . . . . . . . . . . 504.2 Laser Doppler velocimetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.3 Model of the mean flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.4 Velocity fluctuations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.5 Kinematic growth rate of the magnetic field . . . . . . . . . . . . . . . . . . . . . 624.6 Kolmogorov turbulence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.7 Measurements of the velocity spectrum . . . . . . . . . . . . . . . . . . . . . . . 704.8 Turbulent conductivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5 Comparison of measurements of the induced field with predictions . . . . . . . . . 80
5.1 The predicted mean induced magnetic field . . . . . . . . . . . . . . . . . . . . . 805.2 Measurements of the magnetic field . . . . . . . . . . . . . . . . . . . . . . . . . 815.3 Reconstruction of the mean magnetic field . . . . . . . . . . . . . . . . . . . . . . 855.4 Magnetic field amplification and feedback . . . . . . . . . . . . . . . . . . . . . . 875.5 The magnetic spectrum due to turbulence . . . . . . . . . . . . . . . . . . . . . . 945.6 Measurements of the magnetic spectrum . . . . . . . . . . . . . . . . . . . . . . . 985.7 Influence of the back reaction on turbulence . . . . . . . . . . . . . . . . . . . . . 103
6 Observation of an intermittently excited magnetic field . . . . . . . . . . . . . . . . 104
7 Summary and discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
APPENDICES
Appendix A: Calculating the Mode Energy . . . . . . . . . . . . . . . . . . . . . . . 128

vi
LIST OF TABLES
Table Page
2.1 Optimized flow parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Experiment parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1 Turbulence characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.1 Results from conditional averaging . . . . . . . . . . . . . . . . . . . . . . . . . . . 109

vii
LIST OF FIGURES
Figure Page
1.1 Schematic of the sodium experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Dudley and James t2s2 flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2 Growth rate plot of the Dudley and James t2s2 flow . . . . . . . . . . . . . . . . . . 19
2.3 Stretch-twist-fold mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4 Structure of the excited magnetic field . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.5 Growth rates for different flows . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 Photo of the Madison Dynamo Experiment . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Sodium conductivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 Automation software display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4 Motor power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.5 Photo of magnetic sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.1 Photo of the water experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.2 Photo of the impellers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3 Schematic of the water experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4 LDV time series measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.5 Measurements of the mean flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.6 Reconstruction of the mean flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61

viii
Figure Page
4.7 PDF of velocity fluctuations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.8 Contour plot of velocity fluctuation levels . . . . . . . . . . . . . . . . . . . . . . . . 64
4.9 Eigenmode growth rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.10 Particle arrival time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.11 Sample and hold interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.12 Velocity power spectra from LDV . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.13 Velocity correlation functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.14 Turbulent conductivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.15 Spatial distribution of turbulent conductivity . . . . . . . . . . . . . . . . . . . . . . 79
5.1 Time series measurements of the magnetic field . . . . . . . . . . . . . . . . . . . . . 83
5.2 Internal magnetic field measurements . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.3 Spherical harmonic modes of the field induced by the flow . . . . . . . . . . . . . . . 88
5.4 Reconstruction of the magnetic field induced by the flow . . . . . . . . . . . . . . . . 89
5.5 Predicted gain and growth rate of induced transverse dipole field . . . . . . . . . . . . 92
5.6 Gain and orientation of induced transverse dipole field . . . . . . . . . . . . . . . . . 93
5.7 Magnetic power spectrum from simulation . . . . . . . . . . . . . . . . . . . . . . . 96
5.8 Magnetic power spectra measurements . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.9 Magnetic spectrum varying applied field strength . . . . . . . . . . . . . . . . . . . . 101
5.10 Dependence of dissipation scale on Rm . . . . . . . . . . . . . . . . . . . . . . . . . 102
6.1 PDF of magnetic field fluctuations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6.2 Surface magnetic field during burst . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.3 Time series of transverse dipole field . . . . . . . . . . . . . . . . . . . . . . . . . . 108

ix
AppendixFigure Page
6.4 Conditionally averaged magnetic bursts . . . . . . . . . . . . . . . . . . . . . . . . . 108
6.5 Energy PDFs of transverse dipole field . . . . . . . . . . . . . . . . . . . . . . . . . . 110

x
Nomenclature
MHD Magnetohydrodynamics
LDV Laser Doppler Velocimetry
VKS Von Karman Sodium Experiment
PDF Probability Distribution Function
PSD Power Spectral Density
ACF Autocorrelation Function

xi
Abstract
Determining the onset conditions for magnetic field growth in magnetohydrodynamics is fun-
damental to understanding how astrophysical dynamos such as the Earth, the Sun, and the galaxy
self-generate magnetic fields. The Madison Dynamo Experiment was constructed to explore the
role of turbulence in changing these onset conditions for an impeller-driven flow of liquid sodium.
The flow generates intermittent magnetic bursts with the spatial structure predicted from kinematic
dynamo theory.
A model of the mean flow was constructed from laser Doppler velocimetry measurements
of the flow in an identical-scale water experiment. A kinematic eigenvalue code predicted that
the flow would generate a predominantly dipolar magnetic field perpendicular to the symmetry
axis for sufficiently high impeller speeds. The flow amplifies the magnetic field by stretching
field lines. The field lines are then twisted back onto themselves creating a feedback loop for
dynamo growth. The same flow was generated in the sodium experiment and was found to amplify
an applied magnetic field oriented perpendicular to the drive shaft axis of the experiment. The
amplification increased with motor rotation rate as the induced field became more closely aligned
with the applied field, though a reduction in the amplitude is attributed to an enhanced resistivity
due to turbulent diffusion.
The turbulence was characterized by measurements of the velocity and magnetic power spectra.
The velocity spectra have a Kolmogorov scaling. The wavenumber at which resistive dissipation
range becomes dominant was observed to increase with flow speed indicating that smaller scale
magnetic structures were generated. No amplification due to a small-scale dynamo was observed.
The intermittent bursts were analyzed using conditional averaging. The growth rate was found
to increase linearly with impeller rotation rate resulting in stronger bursts. The average duration

xii
decreased so that the bursts continued to satisfy Poisson statistics; they remained rare, random
events. The excitation of the bursts is attributed to modification of the dynamo threshold by large-
scale velocity fluctuations. The results suggest that magnetic field generation in fully-developed
turbulence is characterized by intermittent bursts caused by distortions of the flow profile with a
minimal threshold for excitation.

1
Chapter 1
Introduction
1.1 A brief history of the dynamo problem
It is currently accepted that the magnetization of most astrophysical bodies is not of primordial
origin, but rather the result of an ongoing dynamical process. This process, known as the magneto-
hydrodynamic (MHD) dynamo, results from the motion of an electrically conducting fluid within
a rotating body. A conductor moving through a magnetic field generates a current according to
Faraday’s Law [Jackson, 1999, Sec. 5.15]. In a flow which creates a dynamo, these currents gener-
ate the self-same magnetic field. The resulting system converts a portion of the mechanical energy
in the fluid flow to magnetic energy. The theory of the self-exciting dynamo has attracted the at-
tention of physicists for most of the 20th century and has endured as a topic of current research
with relevance in the fields of astrophysics, geophysics, and plasma physics1.
The notion that magnetic fields might be the result of dynamic generation due to flowing con-
ducting fluids began with Larmor’s tentative suggestion that the magnetic fields associated with
sunspots are generated by convective flow in the sun [Larmor, 1919]. The presence of magnetic
fields within sunspots was demonstrated by spectroscopy measurements of Zeeman splitting by
Hale [1908]. He noticed that the sunspots appear in pairs, each member of the pair having a dif-
ferent polarity, and follow a cyclic pattern with an average period of 11 years. Hale’s observations
established that there is a dynamic process of magnetic field generation in the Sun with a regular
cycle2.1For a thorough discussion of the history of geomagnetism, see Stern [2002]. For more general discussions of the
history of the dynamo problem, see Parker [1970] and the introductory chapters of Moffatt [1978] and Childress andGilbert [1995].
2For an overview of the solar dynamo, see Charbonneau [2005].

2
The dynamic generation of the solar magnetic field lead to suggestions that the Earth’s field
is also maintained by a dynamo, thus refuting Gilbert’s permanent magnetization hypothesis from
1600. Today it is known that the temperature of the Earth’s core is much higher than the Curie
temperature, the temperature at which ferromagnetic materials lose their magnetization. Modern
reconstructions of the Earth’s magnetic field over the past 400 years from ship navigation logs
demonstrate variations in the field suggestive of dynamic generation [Jackson et al., 2000]. During
the time of Larmor and Hale, however, evidence used to sustain the geodynamo hypothesis came
from the paleomagnetic record which was constructed from measurements of the remnant magne-
tization in rocks and lava flows around the globe. The observations revealed that the orientation of
the Earth’s field reverses itself randomly with an average period of 200,000 years [Merrill et al.,
1996].
The difficulty of applying Larmor’s novel concept, however, was quickly realized when Cowl-
ing [1933] proved that an axially symmetric magnetic field could not be sustained by an axially
symmetric flow, thereby ruling out Larmor’s simple model. In fact, Cowling’s theorem established
that it is essential to address the dynamo problem in three dimensions. Eventually, with the aid of
Elsasser’s spherical harmonic expansion technique [Elsasser, 1946], Bullard and Gellman [1954]
suggested two important processes in the generation of magnetic fields. First, differential rotation
in a flow can induce a strong toroidal magnetic field from an initial poloidal magnetic field. This
process is often referred to as the Ω-effect. Second, a non-axisymmetric helical component of the
flow is required to twist the toroidal magnetic field back into the poloidal direction to complete the
cycle of field generation. This description of amplification and feedback provided the framework
for later successful dynamo models. Calculations based on the Bullard and Gellman formalism by
Dudley and James [1989] provided examples of fluid dynamos with simple spherical geometries.
The helical motion required to complete the dynamo feedback cycle was the basis for Parker’s
model of the geodynamo [Parker, 1955a]. He argued that the desired mean magnetic field on
the large-scale could be obtained by averaging together the effects of several small-scale cyclonic
eddies. Parker’s idea was formalized by Krause and Radler [1980] into what is now known as
mean-field theory; the theory provides a mathematical framework for addressing the effects of

3
MHD turbulence. From this theory, it was shown that turbulence lacking reflectional symmetry
can generate currents along the mean magnetic field (known as the α-effect), thereby providing
the dynamo feedback mechanism. The mean-field dynamo model has been used as the basis for
explaining the generation of magnetic fields in the Earth, the Sun, and the galaxy [Parker, 1971a,b].
The problem of the homogeneous dynamo has lead to an extensive analytical and compu-
tational treatment of magnetohydrodynamics and models of turbulence. Modern computational
resources have allowed numerical dynamo models to develop from kinematic calculations [Lil-
ley, 1970; Roberts, 1972; Roberts and Stix, 1972; Gubbins, 1973; Pekeris et al., 1973; Kumar
and Roberts, 1975; Dudley and James, 1989] to fully dynamic simulations. The most popular
examples are those of the geodynamo simulations of Glatzmaier and Roberts [1995], Kuang and
Bloxham [1997], and Kageyama et al. [1999]. Each of these simulations is capable of reproducing
certain notable characteristics of the Earth’s field such as dominance of the axial dipole moment,
the magnitude of the field, and even polarity reversals. None of the simulations have succeeded
in simultaneously obtaining these characteristics, and each one relies on using parameters that are
either not known for the Earth to sufficient accuracy or are quite different from the estimates. Of
particular concern is the inability to adequately address the development of turbulence in direct
numerical simulations. The lack of proven MHD turbulence models has prompted the need for
experiments to explore the generation of magnetic fields in turbulent flow.
1.2 Dynamo experiments
One of the earliest experiments relevant to the dynamo problem was conducted by Lehnert
[1957]. He demonstrated the Ω-effect by observing a toroidal magnetic field induced by an axisym-
metric cylindrical flow of sodium with an initially imposed axial field. Although the experiment
does not demonstrate the generation of a magnetic field, it establishes one of the steps in Bullard
and Gellman’s dynamo scheme. Lowes and Wilkinson [1963, 1968] were the first to demonstrate
magnetic field generation with a homogeneous dynamo in the laboratory. The device consisted
of two solid conducting cylinders rotating in a conducting house-shaped block. The device suc-
ceeded in achieving field growth through the use of various high-permeability materials. Each

4
cylinder amplified the magnetic field in the other cylinder thereby closing the requisite feedback
loop.
The concept of large-scale field generation from non mirror-symmetric flow suggested by
mean-field dynamo theory was tested in the α-box experiment of Steenbeck et al. [1968]. A flow
of liquid sodium was directed through two interwoven channels such that flow in one channel was
orthogonal to flow in the adjacent channel. A weak magnetic field was applied across the chan-
nels; the voltage measured across the device was independent of flow direction and proportional
to the applied field. It demonstrated that non mirror-symmetric flow could be used as a mecha-
nism for generating currents parallel to the mean magnetic field. Hence, the αΩ-dynamo model of
mean-field theory gained experimental support.
In the 1970s, the dynamo problem took on a more practical dimension when it was recognized
by Bevir [1973] that the geometry of the liquid sodium cooling loop on fast breeder reactors, a heli-
cal flow surrounded by a conducting medium, could act as a hydromagnetic generator, or dynamo
[Ponomarenko, 1973]. Further studies showed that the operational parameters for the facilities
were below the threshold for generating a magnetic field [Alemany et al., 2000], however the
cooling loop experiments provided the technology and the impetus for later liquid metal dynamo
experiments.
A breakthrough in the problem of experimental demonstration of a fluid dynamo occurred at the
end of 1999 when two different liquid sodium experiments observed a self-excited dynamo. The
first facility, in Riga, Latvia, used an impeller to generate helical flow down a vertical cylindrical
pipe [Gailitis et al., 2000, 2002a, 2004]. The design was based on the model of a homogeneous
screw-flow dynamo demonstrated by Ponomarenko [1973]. The return flow proceeded through an
outer coaxial cylinder and the entire fluid column was surrounded by a jacket of stationary sodium.
The purpose of the back flow region was to make the magnetic instability global; the helical flow
alone would amplify the field locally and carry it down the cylinder. The resulting excited field was
observed to be oscillatory, and the saturated field strength was shown to depend on the impeller
rotation rate [Gailitis et al., 2001]. The instability was sufficiently long-lived to produce fields that
modified the flow so that saturation effects could be explored [Gailitis et al., 2002b]. It is currently

5
understood that the rotation of the inner helical flow was slowed by Lorentz forces while a counter
rotating flow was established in the outer-most cylinder of the initially stationary sodium [Stefani
et al., 2005].
The second experiment to report a self-excited dynamo is located in Karlsruhe, Germany
[Stieglitz and Muller, 2001; Muller et al., 2002, 2004]. The facility used a series of adjacent
helical flow channels in a large cylindrical container to produce a periodic flow pattern. Such flows
were shown by Roberts [1970] to produce growing magnetic fields. Liquid sodium was driven by
inductive pumps through pipes in which helical baffles produced the desired flow. The periodic
spatial pattern of the flow produced a steady self-excited magnetic field using the Earth’s field as a
seed.
Although the experiments at Riga and Karlsruhe provided experimental substantiation of ho-
mogeneous dynamos, they were limited in the extent to which turbulence was allowed to modify
the flow. Each of the experiments relied on a separation of the scale at which velocity shear resides
and the scale at which the magnetic field was generated. The experiments are well-described by
laminar models of the flow since the flow geometry was confined by baffles and pipes and, as such,
the mean-field effects relying on the spontaneous breaking of flow symmetry were insignificant.
Several experiments have been developed to study the effects of magnetic field generation in
fully-developed turbulent flows where there is no scale separation. One of these experiments was
conducted at Swarthmore University by Reighard and Brown [2001]. A turbulent flow of liquid
sodium was established in a spherical Pyrex flask with a single Teflon impeller. Copper electrodes
were immersed in the flow, and the resistivity of the circuit was measured for various impeller rota-
tion rates. A 4% reduction in conductivity was measured and attributed due to enhanced resistivity
by turbulence (known as the β-effect from mean-field theory).
Experiments at the University of Maryland demonstrated that impeller-driven helical flows of
liquid sodium in an unconstrained geometry can reduce the decay rate of an externally applied
magnetic field [Peffley et al., 2000; Lathrop et al., 2001]. The flow was generated by two counter-
rotating impellers in a 30 cm diameter sphere. Although no velocimetry measurements were per-
formed, the flow is likely very similar to the flow produced in the Madison Dynamo Experiment.

6
Saturation of the induced magnetic field due to strong externally applied fields was also studied
[Sisan et al., 2003].
The von Karman Gallium (VKG) experiment in Lyon [Odier et al., 1998; Bourgoin et al.,
2004b] and von Karman Sodium (VKS) experiments in Cadarache, France [Bourgoin et al., 2002;
Petrelis et al., 2003; Bourgoin et al., 2004a] documented the induction effects within a turbulent
flow established by two counter-rotating disks in a cylindrical vessel. The flow was studied in
water and the role of boundary conditions in minimizing the required flow speed for magnetic field
excitation was explored [Ravelet et al., 2005; Marie et al., 2003, 2006].
1.3 Motivation for the experiment
The Madison Dynamo Experiment is currently the largest of the devices studying the simple
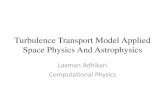
flows of Dudley and James [1989]. A schematic of the experiment is shown in Fig. 1.1. The
purpose of the Madison Dynamo Experiment is to explore the role of turbulence in the generation
of magnetic fields in a homogeneous dynamo. The flows generated in the experiment are inspired
by the simple roll flow geometries shown to self-excite by Dudley and James [1989] for conditions
that can be achieved in a laboratory experiment. The experiment is designed to produce flows
which, though highly turbulent, on average have the same structure as the simple roll flows.
The work done on this experiment complements the results of the successful pipe-flow dynamo
experiments at Karlsruhe and Riga. Although the results of these experiments demonstrate the gen-
eration of magnetic fields using a flowing liquid metal, the flow geometries are highly constrained
and contrived to provide a separation between turbulence on the small-scales and the self-excited
magnetic field on the large-scale. The spherical geometry of the Madison Dynamo Experiment
allows turbulence to develop to the scale at which the magnetic field is produced, thereby breaking
the scale separation assumption of mean-field dynamo theory.
The object of the research presented in this thesis is to document the characteristics of the
dynamo transition in a turbulent flow. Experiments have been performed to quantify the amplifica-
tion of an imposed magnetic field by the flow of liquid sodium. These measurements are compared
with predictions from a laminar model of the flow constructed from velocimetry measurements in

7
Figure 1.1 A schematic of the sodium experiment. A turbulent flow is generated by the twocounter-rotating impellers. Two sets of coils, one coaxial and one perpendicular with the driveshafts, are used to generate various seed fields. The field induced by the flow is measured by anarray of Hall probes both on the surface of the sphere and within stainless steel tubes inside thesphere.

8
water. The discrepancy between the measured results and the prediction are attributed to an effec-
tively enhanced resistivity due to turbulent diffusion. The turbulent spectrum of both the velocity
and magnetic fields is documented; the velocity spectrum demonstrates an inertial range consistent
with Kolmogorov turbulence theory whereas the magnetic spectrum suggests that the magnetic
field is advected passively. The magnetic spectrum also has an apparent dissipation scale below
which magnetic diffusion becomes dominant. Finally, measurements demonstrating the intermit-
tent growth and decay of a magnetic field with the spatial structure predicted from the laminar
dynamo theory are presented. The observation of this intermittent dynamo excitation suggests
that the transition to a dynamo is not smooth as predicted from laminar dynamo theory, but rather
punctuated by random bursts of a large-scale magnetic field.
1.4 Outline of the thesis
Chapter 2 begins with the theoretical model for magnetic field growth for a laminar flow. The
kinematic dynamo problem is presented along with a laminar flow model which is calculated to
produce growing magnetic fields at reasonable flow speed for a laboratory experiment. The effects
of turbulence on the results of the laminar model are discussed.
Chapter 3 provides a description of the apparatus, diagnostics, and laboratory infrastructure
for performing experiments with turbulent flows of liquid sodium. Each of the vessels used for
holding the sodium is described along with the techniques for transferring liquid sodium from one
container to another. Considerations of the safe handling of sodium are also presented.
Chapter 4 details the results of hydrodynamic experiments used to model the mean flow. An
experimental apparatus identical in scale and geometry with the liquid metal experiment is used to
generate turbulent flows of water. Laser Doppler velocimetry measurements are used to construct
a model of the mean flow from which the threshold of magnetic field growth is calculated. The
measurements are also used to characterize the spatial distribution of velocity fluctuation levels
and to determine the velocity spectrum for the turbulent flow.
In Chapter 5, measurements of the magnetic field induced by the turbulent flow when an ex-
ternal field is applied are presented. Magnetic fluctuations within the flow are also described.

9
These measurements are used to verify the scaling laws established from MHD turbulence theory.
The magnetic dissipation scale is identified and a discussion of the effects of the Lorentz force on
small-scale turbulence is presented.
Chapter 6 presents the the observation of magnetic field bursts due to intermittent excitations.
The bursts are characterized using conditional averaging and the mechanism for generating the
intermittent excitation is discussed.
Chapter 7 concludes the thesis with a summary of the experiments performed.

10
Chapter 2
The kinematic dynamo problem
This chapter describes the formulation of the kinematic dynamo problem in which one tries
to find a velocity field that produces a growing magnetic field. A linear stability analysis of the
magnetic induction equation predicts the growth rate of the magnetic field for a specified flow. A
simple flow geometry composed of two counter-rotating helical vortices is shown to generate a
dipole magnetic field perpendicular to the flow’s symmetry axis. The mechanism for generating
the field is described by the stretching and twisting of magnetic field lines to provide the necessary
amplification and feedback required for a dynamo. The mathematical framework presented in this
chapter will later be used to predict the behavior of the dynamo experiment.
2.1 The magnetic induction equation
The dynamics of electrically conducting fluids is known as magnetohydrodynamics (MHD).
The equations governing the evolution of an incompressible conducting fluid such as a liquid metal
are given by the magnetic induction equation,
∂B
∂t= ∇× v ×B +
1
µ0σ∇2B (2.1)
and the Navier-Stokes equation,
ρ
[∂v
∂t+ (v ·∇)v
]= F + J×B−∇p + ρν∇2v. (2.2)
Here, B is the magnetic field, v is the velocity field, σ is the fluid conductivity, µ0 is the vacuum
permeability, ρ is the fluid density, F is the driving force per unit volume, J is the current density,
ν is the kinematic viscosity, and p is the pressure.

11
A homogeneous MHD dynamo is created when a force F creates a flow for which Eqs 2.1–2.2
are unstable to magnetic field growth. The full system of MHD equations form a coupled set of
nonlinear partial differential equations for which nontrivial analytic solutions are difficult to obtain.
To simplify the problem, it is assumed that the magnetic field is initially weak so that the Lorentz
force can be neglected in Eq. 2.2. The velocity field then is determined by the forcing term F and
the boundary conditions. Supposing that this velocity field is specified, Eq. 2.1 becomes linear in
B and can be solved.
In its dimensionless form, the magnetic induction equation is written as
∂B
∂t′= Rm∇′ × (v′ ×B) +∇′2B (2.3)
where v/v′ = v0 is a characteristic speed of the flow, t/t′ = τσ = µ0σL2 is the diffusion time,
∇ = L∇′ where L is a characteristic length scale, and Rm = µ0σLv0 is the magnetic Reynolds
number. Throughout the rest of the chapter it will be assumed that quantities are in normalized
units. The right-hand-side of Eq. 2.3 has two terms. The first term describes the advection and
stretching of magnetic field lines whereas the second term describes the diffusion of the magnetic
field. The magnetic Reynolds number can be thought of as the ratio of the rate of advection to
the rate of diffusion [Moffatt, 1978, Sec. 3.2]. It can be seen that when Rm = 0, Eq. 2.3 reduces
to the vector diffusion equation for the magnetic field. In such a situation, an initially specified
magnetic field will decay away on a timescale t ∼ τσ. For a flow to produce a dynamo, the rate
of advection must be sufficiently fast compared with the rate of diffusion, hence the magnetic
Reynolds number must be large (see for instance Proctor [1977] or Backus [1957] for analytical
calculations). The minimum value of Rm that provides a growing magnetic field is called the
critical magnetic Reynolds number Rmcrit. A desirable flow for a liquid metal experiment limited
in size and maximum flow speed will have a low value of Rmcrit.

12
2.2 The Bullard and Gellman formalism
Since the magnetic field is solenoidal, i.e. ∇ ·B = 0, it can be written in terms of poloidal and
toroidal vector fields as [Moffatt, 1978, Sec. 2.2]
B(r) = ∇×∇× S(r, θ, φ)r + ∇× T (r, θ, φ)r. (2.4)
To exploit the spherical geometry of many astrophysical dynamos, the poloidal and toroidal scalar
functions are expanded in spherical harmonics to give:
S(r, θ, φ) =∞∑
`=1
∑m=0
S`,m(r)Ymc,s` (θ, φ), (2.5)
T (r, θ, φ) =∞∑
`=1
∑m=0
T`,m(r)Ymc,s` (θ, φ). (2.6)
The spherical harmonics used in the expansions are defined as
Ymc,s` (θ, φ) =
√2` + 1
2π (1 + δm,0)
(`−m)!
(` + m)!Pm
` (cos θ)
cos mφ
sin mφ
, (2.7)
where Pm` (cos θ) are the associated Legendre polynomials and δij is the Kronecker delta. In terms
of the poloidal and toroidal spherical harmonic modes, the magnetic field components are:
Br(r, θ, φ) =∑
γ
` (`γ + 1)
r2Sγ(r)Yγ(θ, φ), (2.8)
Bθ(r, θ, φ) =∑
γ
1
r
(dSγ
dr
∂Yγ
∂θ+
Tγ(r)
sin θ
∂Yγ
∂φ
), (2.9)
Bφ(r, θ, φ) =∑
γ
1
r
(1
sin θ
dSγ
dr
∂Yγ
∂φ− T`,m(r)
∂Yγ
∂θ
). (2.10)
Here, the dual spherical harmonic indices ` and m and the selection of sin(mφ) or cos(mφ) have
been expressed as the single index γ to simplify the notation. It will be understood that summations
over Greek letter indices represent summations over both spherical harmonic indices and sines and
cosines with particular values of the regular indices written as `γ and mγ where appropriate.
Assuming the fluid is incompressible (an assumption generally valid for liquid metals, but not
plasmas), ∇ · v = 0. Thus, v can also be expressed in terms of expansions of poloidal and toroidal

13
fields in spherical harmonics. In this thesis, poloidal and toroidal magnetic field harmonics are
written as Sγ and Tγ , whereas poloidal and toroidal velocity field harmonics are written as sα and
tα.
Substituting the magnetic and velocity field spherical harmonic expansions into Eq. 2.3 and
exploiting the orthogonality of the poloidal and toroidal vector spherical harmonics allows the
magnetic induction equation to be recast as:
∂Sγ
∂t=
∂2Sγ
∂r2− `γ(`γ + 1)
r2Sγ +
Rm
r2
∑γ
[(sαSβSγ) + (tαSβSγ)
+ (sαTβSγ) + (tαTβSγ)] , (2.11)
∂Tγ
∂t=
∂2Tγ
∂r2− `γ(`γ + 1)
r2Tγ +
Rm
r2
∑γ
[(sαSβTγ) + (tαSβTγ)
+ (sαTβTγ) + (tαTβTγ)] . (2.12)
The bracket terms in Eqs. 2.11–2.12 represent the interaction of a particular velocity harmonic
with a magnetic field harmonics. For example, the (tαSβSγ) term characterizes the interaction of
the toroidal velocity field harmonic tα with the poloidal magnetic field harmonic Sβ to produce
the poloidal magnetic field harmonic Sγ . The interaction terms in Eqs. 2.11–2.12 are defined as
[Bullard and Gellman, 1954; Sarson, 1994; Spence, 2006]
(sαSβSγ) =Kαβγ
Nγ
[pαcαsα
dSβ
dr− pβcβ
dsα
drSβ
]
(sαSβTγ) = −Lαβγ
Nγ
[pβ
(d2sα
dr2− 2
r
dsα
dr
)Sβ − 2
(cγ
dsα
dr+
pαsα
r
)dSβ
dr+ pαsα
d2Sβ
dr2
]
(sαTβSγ) =Lαβγ
Nγ
pαsαTβ
(sαTβTγ) =Kαβγ
Nγ
[pαcα
(dsα
dr− 2sα
r
)+ pγcγ
dsα
dr
]Tβ + pαcαsα
dTβ
dr
(2.13)
(tαSβSγ) =Lαβγ
Nγ
pβtαSβ
(tαSβTγ) = −Kαβγ
Nγ
[(pγcγ + pβcβ)tα
dSβ
dr+ pβcβ
(dtαdr
− 2tαr
)Sβ
]
(tαTβSγ) = 0

14
(tαTβTγ) =Lαβγ
Nγ
pγtαTβ
where pα = `α(`α + 1) and cα = (pα − pβ − pγ)/2. For the spherical harmonic normalization
used in Eq. 2.7, Nγ = pγ . Each interaction term also contains the coefficients Kαβγ and Lαβγ
which are the Gaunt and Elsasser integrals respectively. Note that the (tαTβSγ) term is zero since
a toroidal flow cannot generate a poloidal field from a toroidal field. The Gaunt [1929] and Elsasser
[1946] integrals are triple spherical harmonic integrals given by:
Kαβγ =
∫ 2π
0
∫ π
0
YαYβYγ sin θ dθ dφ, (2.14)
Lαβγ =
∫ 2π
0
∫ π
0
Yα
(∂Yβ
∂θ
∂Yγ
∂φ− ∂Yβ
∂φ
∂Yγ
∂θ
)dθ dφ. (2.15)
Due to the orthogonality of the spherical harmonics, the Gaunt and Elsasser integrals are only
nonzero for certain combinations of α, β, γ. Hence, a set of selection rules can be established for
the various interaction parameters [Bullard and Gellman, 1954]. The Gaunt integrals are non-zero
only if
1. mα ±mβ ±mγ = 0 and
2. |`α − `γ| ≤ `β ≤ `α + `γ .
3. `α + `β + `γ is even and
4. the number of cos(mφ) harmonics is odd.
The Elsasser integrals are non-zero only if
1. mα ±mβ ±mγ = 0 and
2. |`α − `γ| ≤ `β ≤ `α + `γ .
3. `α + `β + `γ is odd,
4. the number of cos(mφ) harmonics is even, and
5. all the harmonics are different.

15
These selection rules greatly reduce the number of terms in the expansions in Eqs. 2.11 and 2.11.
In fact, Bullard and Gellman [1954] created a system of diagrams to chart all of the relevant
interactions for some simple cases. More importantly, the selection rules make it reasonable to
expect that expansions in Eqs. 2.11–2.12 can be truncated for the purpose of computation.
2.3 The kinematic eigenvalue problem
The magnetic induction equation 2.3 can be solved by assuming a solution of the form
B(r, t) =∑
i
Bi(r)eλit. (2.16)
The induction equation can then be written as an eigenvalue equation with eigenvalues λi and
eigenfunctions Bi(r) satisfying
λiBi(r) = Rm∇× v ×Bi(r) +∇2Bi(r). (2.17)
The kinematic dynamo problem now is formulated as a search for the velocity profile v for which
Re(λi) > 0 with the lowest value of Rm.
The time derivatives in Eqs. 2.11–2.12 can be written as
∂Sγ
∂t=
∑i
λiSγ,i (2.18)
∂Tγ
∂t=
∑i
λiTγ,i (2.19)
thus reducing them to a set of coupled linear ordinary differential equations for the poloidal and
toroidal magnetic field harmonics. To solve this system of equations, boundary conditions on
v(r, θ, φ) and B(r, θ, φ) must be specified. To prevent singular values at the origin,
s`,m = t`,m = S`,m = T`,m = 0 at r = 0. (2.20)
Assuming the flow is contained within a sphere, we require vr = 0 at r = 1 (recall that r is scaled
to the radius of the sphere) which implies
s`,m = 0 at r = 1. (2.21)

16
It is assumed that outside the sphere there are no currents so that ∇×B = 0 for r ≥ 1. Hence,
outside the sphere the magnetic field can be described in terms of the magnetic potential Φ where
B(r, θ, φ) = −∇Φ(r, θ, φ) and ∇2Φ = 0. (2.22)
Since Φ satisfies Laplace’s equation, it can be written as [Arfken and Weber, 1995, Sec. 8.3]
Φ(r, θ, φ) =∑
`,m
(C`,mr` + D`,mr−(`+1)
)Y m
` (θ, φ). (2.23)
The constraint that Φ → 0 as r →∞ requires C`,m = 0. The components of the magnetic field
outside the sphere are then given by
Br(r, θ, φ) =∑
`,m
D`,m (` + 1) r−(`+2)Y m` (θ, φ) (2.24)
Bθ(r, θ, φ) = −∑
`,m
D`,mr−(`+2)∂Y m`
∂θ(2.25)
Bφ(r, θ, φ) = −∑
`,m
D`,mr−(`+2)
sin θ
∂Y m`
∂φ. (2.26)
Assuming that surface currents at the edge of the sphere are negligible for time scales on the order
of τσ, the magnetic field at r = 1 is continuous1. Matching Eqs. 2.8–2.10 and 2.24–2.26 at the
surface of the sphere yields the boundary conditions
dS`,m
dr
∣∣∣∣r=1
+ `S`,m(1) = 0 (2.27)
T`,m(1) = 0. (2.28)
The toroidal field vanishes at the boundary of the sphere since the geometry is simply connected.
With the boundary conditions on the velocity and magnetic fields specified in Eqs. 2.20–2.21,
and 2.27–2.28, the equations can be solved computationally. The radial profiles are discretized on
a regular array ri and the radial derivatives are calculated using finite differencing. The magnetic
field is written in vector form with components Bγ,i = [Sγ(ri), Tγ(ri)]. The diffusion terms in
1Again, recall that the radial coordinate is normalized the radius of the sphere.

17
Eqs. 2.11–2.12 are written in terms of the matrix elements Dγ,j and the interaction terms in the
advection terms are written as matrix elements Aγ,j . The discretized induction equation is thus
λB = (A + D) B. (2.29)
The equations are solved with a linear eigenvalue code utilizing the ARPACK eigenvalue solver
[Lehoucq et al., 1997] developed by R. O’Connell and described in Spence [2006], O’Connell
et al. [2000], and Forest et al. [2002].
2.4 Simple roll flow dynamos
As mentioned in Chap. 1, Dudley and James [1989] demonstrated that there are a class of
simple flows in a spherical geometry that self-excite at relatively low magnetic Reynolds numbers.
The flow addressed in this thesis is modeled by the t2,0 and s2,0 terms in Bullard and Gellman’s
spherical harmonic expansion. Hence, it is called a t2s2 flow. The equations for the radial profiles
used for the Dudley and James flow are
s2,0(r) = εr2 sin(πr) (2.30)
t2,0(r) = r2 sin(πr) (2.31)
where ε is the parameter that sets the relative strength of the poloidal flow to the toroidal flow.
The radial profiles satisfy the boundary conditions in Eqs. 2.20–2.21. A contour plot of the t2s2
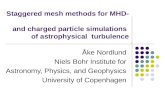
flow using these radial profiles is shown in Fig. 2.1. The flow is axisymmetric and composed of
two counter-rotating toroidal cells shown in the bottom half of Fig. 2.1. The poloidal flow is also
composed of two cells with radial inflow at the equator, defined as the vertical line on the sphere,
and radial outflow along the poles of the horizontal symmetry axis. Together, the poloidal and
toroidal flow cells constitute two counter-rotating vortices.
Using the eigenvalue solver described in Sec. 2.3, the growth rate of the least-damped magnetic
eigenmode is calculated for the Dudley and James t2s2 flow for ε = 0.14 and at various values of
Rm. The results are shown in Fig. 2.2. The critical magnetic Reynolds number for the flow is
found to be about Rmcrit = 50, in good agreement with Dudley and James [1989].

18
-0.5 -0.3 0.0 0.3 0.5Speed [arb]
vpol
vφ
Figure 2.1 Contours of the Dudley and James t2s2 flow. The flow is symmetric about the hori-zontal axis. The upper hemisphere depicts streamlines of the poloidal flow. The flow is radiallyoutward at the poles of the symmetry axis and radially inward at the equator. The strength of theflow is indicated by the color contour. The bottom hemisphere depicts a contour plot of the toroidalflow. The two toroidal flow cells are counter rotating with red indicating flow out of the page andblue indicating flow into the page.

19
0 20 40 60 80Rm
-15
-10
-5
0
5
10
Rea
l Gro
wth
Rat
e
20 40 60
Figure 2.2 Growth rate of the least-damped magnetic eigenmode of the Dudley and James t2s2flow as a function of Rm. The growth rate is specified in units of τσ.

20
Interest in a liquid metal experiment using the t2s2 flow is motivated both by the simplicity
of the flow structure and the low value of Rm required to generate magnetic fields. It is apparent
that two counter-rotating helical impellers placed along the axis of symmetry should be capable of
producing the desired flow. An experimental demonstration of the flow is presented in Chap. 4.
The critical magnetic Reynolds number for the t2s2 flow can be slightly reduced by making
modifications to the radial profiles in Eqs. 2.30–2.31. In an attempt to find the radial profiles that
minimize Rmcrit, the poloidal and toroidal profiles are parameterized as
s2,0(r) = asr2 exp
[− δ
r(1− r)− (r − rs)
2
w2s
](2.32)
t2,0(r) = atr2 exp
[− δ
r(1− r)− (r − rt)
2
w2t
], (2.33)
where as, at describe the relative amplitudes of the poloidal and toroidal modes; rs, rt describe the
radial position of the poloidal null points and the toroidal peak; ws, wt describe the shear; and δ
determines the boundary layer width. Using a nonlinear search algorithm, O’Connell et al. [2000]
obtained the set of parameters shown in Tab. 2.1 for which Rmcrit = 47. Although the optimized
profiles only slightly improved Rmcrit from the Dudley and James trigonometric profiles, the study
revealed that the threshold for magnetic field growth was highly sensitive to the particular shape
of the flow. Modest changes to the shape of the flow profile and the addition of other spherical
harmonic components to the flow can raise Rmcrit significantly. It was also found that ε = as/at,
i.e. the ratio of poloidal speed to toroidal speed, has a large influence on Rmcrit [Forest et al.,
2002]. A Monte Carlo analysis predicted that large-scale velocity fluctuations that distort the flow
profile on timescales comparable to τσ would vary the eigenmode growth rate so that flows with
Rm slightly below Rmcrit would have a finite probability of self-exciting due to fluctuations in the
flow profiles. Hence, the flow is expected to intermittently excite a magnetic field.
as at rs rt ws wt δ Rmcrit
0.14 1.0 0.46 0.5 0.32 0.32 0.05 47
Table 2.1 Values of parameters in Eqs. 2.32–2.33 that minimize Rmcrit for a t2s2 flow.

21
The magnetic field generated by the t2s2 flow is determined by the largest growing eigenmode
calculated by the eigenvalue code described in Sec. 2.3. Outside the sphere, the eigenmode is
dominated by the S1,1 component in the spherical harmonic expansion in Eq. 2.4 corresponding to a
dipole field oriented perpendicular to the rotation axis of the flow. There is no preferred φ direction
for the transverse dipole field; it is free to rotate about the symmetry axis in the equatorial plane
(i.e. for θ = π/2). The eigenmode also has a strong toroidal field within the sphere as expected
from the Ω-effect. Cowling’s theorem [Cowling, 1933; Moffatt, 1978] is not violated since the
symmetry axis of the field is different from the symmetry axis of the flow.
2.5 The stretch-twist-fold mechanism
Although the kinematic analysis in Sec. 2.4 shows that the t2s2 flow can generate a self-excited
magnetic field, the mechanism for field growth is not readily apparent. According to the approach
adopted by Bullard and Gellman [1954], the flow must provide a mechanism for amplification, or
stretching, of the magnetic field lines and for positive feedback to sustain the generation of the
magnetic field.
This mechanism is elucidated when the problem is considered in the limit of high conductivity.
From the integral form of Faraday’s Law [Jackson, 1999, Sec. 5.15], the change in magnetic flux
Ψ through a surface S bounded by a closed loop C is given by
dΨ
dt=
d
dt
∫
S
B · da (2.34)
=
∫
S
∂B
∂t· da +
∮
C
B · (d`× v) (2.35)
= −∫
S
∇× E · da−∮
C
B× v · d` (2.36)
= −∮
C
(E + v ×B) · d`. (2.37)
where v is the velocity of the loop traveling with the fluid. From Ohm’s Law, we have J =
σ (E + v ×B) and so in the limit of high conductivity,
dΨ
dt= −
∮
C
J · d`
σ→ 0 as σ →∞. (2.38)

22
In this limit, the flux through any material fluid element remains constant. Known as Alfven’s
theorem, Eq. 2.38 suggests that magnetic field lines can be considered frozen into the fluid [Alfven,
1943; Moffatt, 1978]. The evolution of the field is then governed entirely by the evolution of the
flow and can be determined by tracking the trajectory of material fluid elements. The evolution of
two magnetic field lines in the Dudley and James [1989] t2s2 flow in the frozen-flux approximation
is shown in Fig. 2.3. The field lines r(`, t) are constructed from an initial magnetic field at t = t0
using the field line equation∂r
∂`
∣∣∣∣t=t0
= B(r, t0). (2.39)
Here ` is a parameterization of points along the field line and B(r, t) = B/ |B| is a unit vector
in the direction of the magnetic field at r(`, t). This formulation is similar to the calculation of a
streamline in a stationary hydrodynamic flow [Chorin and Marsden, 1993]. The trajectory of the
field line elements is calculated from
dr
dt= v(r(t), t), (2.40)
where it is assumed that the flow is stationary so that v(r, t) = v(r, 0). Equation 2.40 is a linear
ordinary differential equation and can be solved numerically using standard techniques such as the
fourth order Runge-Kutta method [Arfken and Weber, 1995, Sec. 8.8]. In solving Eq. 2.40, the
individual field line elements can be advanced in time to r(`, t+∆t) where ∆t is the step size used
in the algorithm. The four panels in Fig. 2.3 show the location of the field lines at four different
points in time.
The initial field lines are constructed from the magnetic field of the largest growing eigenmode
for the t2s2 flow calculated by the kinematic eigenvalue code discussed in Sec. 2.3. They originally
run roughly parallel to the equatorial plane on either side of the plane. Each field line is stretched
into a loop by the combined motion of the radially outward flow along the symmetry axis and the
strong toroidal flow about the axis. Each loop is twisted through an angle of π radians until the
end of the loop lies along the original position of the field line. Due to the finite resistivity of the
fluid, which is ignored in this model, the complicated field line structure deep within the flow is
expected to be smoothed by resistive diffusion. The amplification of the magnetic field is apparent

23
Figu
re2.
3T
heev
olut
ion
oftw
ofie
ldlin
esin
the
t2s2
flow
inth
efr
ozen
flux
appr
oxim
atio
n.T
hefie
ldlin
esar
est
retc
hed
and
twis
ted
byth
ela
rge
helic
alflo
wce
llsun
tilth
efie
ldlin
esov
erla
pat
the
equa
tor.

24
from the stretching of the field line loops and the feedback is provided by the rotation of the loop.
The sensitivity of the dynamo threshold to the ratio of the poloidal to toroidal flow speed can be
understood as a geometric effect; if the toroidal flow is too weak or too strong compared with the
poloidal flow, the loop will not be twisted by exactly π radians and the feedback will be weakened.
2.6 Comparison with simulation
A fully dynamic simulation of the experiment was developed during the construction of the
experiment by Bayliss [2006]. The simulation evolves both the velocity and magnetic field and
so modifications of the flow due to the Lorentz force are included in the dynamics. Hence not
only can the onset conditions for a dynamo be determined, but the saturation regime in which the
magnetic field reaches steady-state can be explored.
The simulated flow is generated by the local forcing term F in Eq. 2.2 designed to model
the impellers in the experiment. For laminar flows in which the viscosity is much larger than
in the experiment, the magnetic field is excited for sufficiently large Rm [Bayliss et al., 2006].
The energy in the magnetic field grows at a rate consistent with the growth rate predicted from
the kinematic eigenvalue code. Once the magnetic energy becomes sufficiently large, the Lorentz
force becomes strong enough to act back on the flow. This back-reaction reduces the flow speed
resulting in a decrease in Rm and alters the flow profile resulting in an increase in Rmcrit. The
magnetic field reaches saturation when the flow becomes marginally stable with Rm = Rmcrit.
In saturation, the kinetic energy and magnetic energy are in near equipartition with Ev/EM ≈2, and the structure of the saturated magnetic field is a dipole field perpendicular to the symmetry
axis of the flow as predicted by the kinematic eigenvalue code. The saturated field is shown in
Fig. 2.4. The orientation of the transverse dipole field is observed to wander about the equatorial
plane. The sensitivity of Rmcrit to ε, the ratio of the poloidal to toroidal flow speed, is also present.
The growth rate of the dominant eigenmode as a function of Rm for several different values of ε
is shown in Fig. 2.5. The flow which minimizes Rmcrit has ε = 0.22.

25
Figure 2.4 The structure of the self-excited magnetic field in saturation for a laminar flow. Thefield lines are constructed from the results of a numerical simulation of the experiment [Baylisset al., 2006]. Blue indicates a field line segment with a positive radial component whereas redindicates a field line segment with a negative radial component.

26
0 50 100 150-15
15
0
0.18
0.14
0.40
0.8,0.85,0.9
λ
[τσ]
-1
ε=0.22
Rm
Figure 2.5 The growth rate of the dominant eigenmode calculated from the numerical simulationof the experiment [Fig. 4 in Bayliss et al., 2006]. Flows with different ratios of poloidal to toroidalflow speed ε are found to have different thresholds for field growth.

27
2.7 Anticipated effects of turbulence
2.7.1 Intermittent excitations
Given that the flows driven in the experiment are turbulent rather than laminar, the threshold
for the dynamo instability is not expected to be the smooth transition from decaying to growing
magnetic fields described by laminar kinematic theory. As mentioned in Sec. 2.4, the growth rate
of the magnetic field is highly sensitive to the geometry of the flow. Hence, large-scale eddies can
cause the instantaneous flow to differ significantly from the mean flow. The threshold for magnetic
field growth given by Rmcrit can therefore be considered a moving target, varying with changes in
the flow profile. The characteristic speed governing the magnetic Reynolds number can also vary
making it possible for a flow which on average is subcritical, i.e. Rm < Rmcrit, to occasionally
satisfy Rm > Rmcrit and briefly produce a growing magnetic field.
Numerical models of the MHD equations have demonstrated that the dynamo transition is
characterized by an on-off intermittency for Rm > Rmcrit [Sweet et al., 2001a,b]. This on-off
intermittency in nonlinear dynamical systems has been attributed to the presence of low-frequency
noise in the control parameter [Aumaitre et al., 2005]. The large-scale velocity fluctuations can
also be viewed as a low-frequency noise in Rm, thus it is expected that in the experiment there is
a range of flow speeds for which the magnetic field is intermittently excited by a dynamo.
2.7.2 Mean-field dynamo
In addition to this intermittency effect, which involves velocity fluctuations at the largest scale
of the flow, there is the possibility that small-scale eddies may contribute to the induced field.
In the context of astrophysical dynamos, these small-scale interactions are usually addressed by
mean-field dynamo theory [Krause and Radler, 1980, Chap. 1]. The velocity and magnetic fields
are separated into mean and fluctuating parts
v = v0 + v
B = B0 + B.(2.41)

28
Here it is assumed that the velocity fluctuations are on a length scale ` which is small compared
with the length scale of the mean motion and mean magnetic field. Substituting Eqs. 2.41 into the
magnetic induction equation 2.1 yields
∂B0
∂t= ∇× (v0 ×B0) + ∇× E +
1
µ0σ∇2B0 (2.42)
∂B
∂t= ∇×
(v0 × B
)+ ∇× (v ×B0) + ∇×G +
1
µ0σ∇2B (2.43)
where E =⟨v × B
⟩is the turbulent EMF and G = v × B − E . Notice from Eq. 2.42 that
small-scale eddies interacting with small-scale fields can contribute to the production of large-
scale magnetic fields.
Mean-field theory provides a method of addressing the turbulent emf E through a first-order
smoothing approximation. Equation 2.43 is linearized in B so that
∂B
∂t≈ ∇× (v ×B0). (2.44)
Note that we have neglected the role of the mean flow and diffusion on the magnetic fluctuations.
Equation 2.44 can then be integrated to obtain
B(r, t) ≈∫ t
t0
∇× [v(r, t′)×B0(r, t′)] dt′. (2.45)
Substituting Eq. 2.45 into the turbulent emf yields
E(r, t) ≈∫ t
t0
〈v(r, t)×∇× [v(r, t′)×B0(r, t′)]〉 dt′ (2.46)
assuming that the order of the integration and averaging can be exchanged. The mean magnetic
field is considered constant over the time interval of the integration so that B(r, t′) = B(r, t). The
average over velocity fluctuations is only non-zero over some finite correlation time τcorr so that
the integral can be written as
E(r, t) ≈∫ ∞
0
〈v(r, t)×∇× [v(r, t− τ)×B0(r, t)]〉 dτ. (2.47)
Assuming incompressibility so that ∇ · v = 0, we have
E(r, t) ≈∫ ∞
0
〈v(r, t)× (B0 ·∇) v(r, t− τ)〉 dτ
−∫ ∞
0
〈v(r, t)× [v(r, t− τ) ·∇]B0〉 dτ.
(2.48)

29
In Levi-Cevita notation [Krause and Radler, 1980, Sec. 4.1], the turbulent emf can be written as
Ei = αijB0j+ βijkB0k
(2.49)
where the expansion coefficients αij and βijk are tensors relating the velocity correlations in
Eq. 2.48. Assuming the turbulence is isotropic, Ei is independent of direction and so αij = αδij
and βijk = βεijk, where δij is the Kronecker delta and εijk is the Levi-Cevita antisymmetric ten-
sor. Under these conditions, the turbulent emf is characterized by the two quantities [Krause and
Radler, 1980, Sec. 3.7]:
α = −1
3
∫〈v(r, t) ·∇× v(r, t− τ)〉 dτ, (2.50)
β =1
3
∫〈v(r, t) · v(r, t− τ)〉 dτ. (2.51)
Note that the α-effect is related to the kinetic helicity h = 〈v ·∇× v〉 whereas the β-effect is
related to the autocorrelation function of the velocity fluctuations.
For homogeneous turbulence, α and β are scalar quantities. If we examine just the α term,
the turbulent emf can be written as E = αB0, and through Ohm’s Law J0 = σE = σαB0.
Thus, the turbulent contribution from α produces currents parallel to the mean large-scale magnetic
field. The α-effect, also known as the Parker-effect after Parker [1955b], thus provides a means of
producing a large scale magnetic field perpendicular to the mean field [Steenbeck et al., 1968]. If
the initial mean field is a toroidal field induced by the Ω-effect through differential rotation, then
the α-effect can be used to produce a poloidal field from this toroidal field. The feedback cycle
described by Bullard and Gellman [1954] is closed resulting in an αΩ-dynamo. In the context
of the Madison Dynamo Experiment, the presence of an α-effect due to helical turbulence could
lower Rmcrit thereby making it possible to excite a large-scale magnetic field in the experiment at
lower impeller rotation rates.
A scalar value of β results in a turbulent emf of the form E = −β ∇×B0 = −βµ0J0. Hence,
∇× E = β∇2B0 and so β can be considered an enhancement of the resistivity due to turbulence.
The resulting turbulent conductivity is written as
σT =σ
(1 + µ0σβ). (2.52)

30
A β-effect in the experiment would result in an effective reduction of the magnetic Reynolds num-
ber to RmT = µ0σT av0 thereby reducing the effective field line stretching by the mean flow and
making it more difficult to excite a magnetic field [Reighard and Brown, 2001].
If the statistics of the turbulent small-scale eddies are not time-stationary but rather evolve on
the same time scale as the mean flow, then there may be occasional adjustments to Rmcrit due
to an intermittent α-effect [Leprovost and Dubrulle, 2005]. Likewise if the small-scale eddies are
intermittently decorrelated, then the β-effect may temporarily be suppressed thereby increasing the
effective value of Rm.
2.7.3 Small-scale dynamo
It is also possible that the small-scale eddies may excite a turbulent dynamo at the small-scales
[Frisch et al., 1975]. Simulations for magnetic Prandtl numbers of order unity using EDQNM2
closure methods [Pouquet et al., 1976; Pouquet and Patterson, 1978] and direct numerical simula-
tions [Meneguzzi et al., 1981] suggest that there is an ‘inverse cascade’ of magnetic fluctuations
from the small-scales up to the mean flow scale.
Going beyond the kinematic approximation, it is possible that the small-scale dynamo may
saturate before the large-scale magnetic field develops and thereby suppress the α-effect [Vain-
shtein and Cattaneo, 1992; Bhattacharjee and Yuan, 1995; Gruzinov and Diamond, 1996; Cattaneo
et al., 2002]. These ‘catastrophic’ saturation models have been contested however by Blackman
and Field [1999]. The presence of a small-scale dynamo may also change the critical threshold for
the large-scale field growth [Subramanian, 1999; Cattaneo and Tobias, 2005].
It is not clear whether or not a small-Prandtl-number fluid can sustain a small-scale dynamo
[Boldyrev and Cattaneo, 2004; Schekochihin et al., 2004; Schekochihin et al., 2005]. Although
direct numerical simulations still lack the resolution required to adequately model low-Prandtl
number systems, more recent simulations have started to explore progressively smaller values of
Pm [Mininni et al., 2005; Ponty et al., 2005; Bayliss et al., 2006]. The conclusion of these studies
2EDQNM stands for the eddy-damped quasi-normal Markovian approximation and is a turbulence model elabo-rated in Orszag [1970].

31
is that Rmcrit for a turbulent small-scale dynamo becomes very high as Pr is reduced, thus it is
not likely to be excited in the experiment at moderate magnetic Reynolds numbers.

32
Chapter 3
Description of the sodium experiment
The results presented in this thesis are the result of magnetohydrodynamic experiments in tur-
bulent flows of liquid sodium. The main apparatus, referred to as the Madison Dynamo Experi-
ment, is a one-meter diameter sphere filled with liquid sodium1. A picture of the experiment is
shown in Fig. 3.1. A turbulent double-vortex flow of sodium is created by two counter-rotating
impellers within the sphere. The main diagnostics on the experiment are magnetic field measure-
ments from an external array of Hall probes on the surface of the sphere and an internal array
immersed in the flow as seen in the schematic in Fig. 1.1.
Liquid sodium is used in MHD dynamo experiments due to its high conductivity and hydrody-
namic similarity to water. At temperatures just above freezing, sodium has the highest conductivity
of liquid metals with σ = 1.05×107 (Ωm)−1 at 98C. The conductivity decreases by 4% for a 10C
increase in temperature as shown in Fig. 3.2 and so the experiments are limited to a temperature
range of 98–105C. The density and kinematic viscosity of sodium are similar to that of water at
about 50C (see Tab. 3.1). The sodium used for this experiment was donated by Argonne National
Labs and delivered in both 30 gallon and 55 gallon drums. Much of the development of the ex-
periment has been in the design and construction of the facilities for the safe handling of liquid
sodium.1The experiment is featured on the cover of the February 2006 issue of Physics Today.

33
Figure 3.1 A photo of the Madison Dynamo Experiment. In the foreground is the spherical ves-sel covered with insulation. The many pipes are part of an oil heat exchanger used to maintainthe sphere’s temperature. The holding tank is in the vault on the left and the expansion tank ismounted on the tower at the top. There are two sets of magnetic field coils, one coaxial and oneperpendicular with the drive shafts. The coaxial cables coming from the cable tray run to the Hallprobe array.

34
100 110 120 130 140 150Temperature [oC]
8.0•106
9.0•106
1.0•107
1.1•107
Con
duct
ivity
[(O
hm m
)-1]
Figure 3.2 The conductivity of liquid sodium as a function of temperature. The interpolationformula is from Cook and Fritsch [1985].

35
Symbol Description Value Units
a Sphere radius 0.533 m
d Sphere thickness 1.6 cm
rimp Impeller radius 0.153 m
ρ Sodium density (98C) 926 kg/m3
Water density (35C) 994 kg/m3
ν Sodium kinematic viscosity (98C) 7.43× 10−5 m2/s
Water kinematic viscosity (35C) 7.24× 10−5 m2/s
σ Sodium conductivity (98C) 1.05× 107 Ω−1m−1
Pr = µ0σν Magnetic Prandtl number 9.80× 10−4
Table 3.1 Dimensions of the experiment and magnetohydrodynamic properties of sodium. Com-parisons of hydrodynamic properties to water are provided. Properties of sodium are provided byShpil’rain et al. [1985] and Cook and Fritsch [1985] and properties of water are provided by RobertC. Weast [1986].

36
3.1 Industrial automation
The experiment is designed to be run remotely from a control room in a separate part of the
building from the room containing the experiment. The industrial automation system used is Na-
tional Instrument’s FieldPoint I/O bus with Lookout software package. The FieldPoint bus is elec-
trically isolated and sufficiently rugged for the environment. It is controlled from a rack mounted
PC running Windows 2000. The Lookout automation software provides event-based control and
monitoring of the experiment. The front panel display is shown in Fig. 3.3. Relays and digital
output modules are used to activate heaters, open and close electro-pneumatic valves, and energize
the external field coils. Analog and digital input modules are used to monitor quantities such as the
sodium liquid level, pressures, temperatures, shaft rotation rates, and interlock alarms. The Look-
out software records all the monitored quantities to a historical database which can be accessed
from on-screen charts.
The control computer in the lab communicates over an internal 100baseT Ethernet network
with a workstation in the control room. From the workstation, the operator has the same control and
monitoring capability as from the control computer. Networked cameras are positioned throughout
the laboratory to provide surveillance.
3.2 Holding tank
The sodium is kept in a 300 gallon stainless steel pressure vessel referred to as the holding tank.
The holding tank resides in a steel lined vault below floor level. In an emergency, the sodium can be
drained from the experimental vessel by gravity. In case the holding tank is breached, the sodium
will be contained in the vault. The holding tank is heated by a series of Calrod resistive heating
elements. The Calrods are arranged in a 3-phase delta configuration supplied with 240 V. The
power is regulated by a stand-alone proportional-integral-derivative (PID) temperature controller.
The holding tank is insulated with mineral wool to reduce ambient heat loss. Before the holding
tank was filled with sodium, it was evacuated with a roughing pump and heated to 120C to remove
any remaining moisture. Once filled, the holding tank is kept at 120C to keep the sodium liquid.

37
Figure 3.3 The front panel of the Lookout industrial automation software used to control andmonitor the experiment.

38
The holding tank is mounted on load cells which use strain gages to determine the weight of
the tank to within 0.5 pounds. The inventory of sodium transferred to and from the holding tank
is recorded by changes in the tank weight. The liquid level inside the tank is monitored by three
electrodes that enter through a flange on top of the tank. Each electrode is kept at 24 V above the
tank potential. When sodium comes in contact with the electrode, the circuit between the electrode
and the tank wall is completed by the conductive sodium and registered by a digital input module
on the FieldPoint I/O bus. This technique is also used to detect sodium on the floor of the vault. A
series of sodium leak detectors made from two wires, one grounded and the other at 24 V, placed
along a strip of tape, are arranged around the tank. In event of a sodium leak, the sodium shorts
the wires triggering an alarm.
3.3 Experimental vessel
The vessel in which the experiments are conducted is a 42 inch (1 meter) diameter stainless
steel sphere with 5/8 inch (1.6 cm) thick walls. The sphere is supported by four legs cast into a
6 foot deep reinforced concrete slab. The support structure for the experiment is extremely stiff
in order to damp mechanical vibrations. The sphere is pinned to two of the legs and allowed to
slip along the other pair. This arrangement is necessary since the sphere grows by up to 1/4 inch
(6 mm) from room temperature to 120C.
The sphere has two flanges on opposite sides through which the impeller drive shafts enter
the sphere. The flange face seal uses a spiral wound Graphoil gasket. Each shaft is supported
by a bearing assembly mounted to the flange. Each bearing assembly houses two bearings; the
inner bearing provides radial loading while the outer bearing provides axial loading. The inner
bearing accommodates the axial movement due to thermal growth of the stainless steel shaft. The
bearings are lubricated by an oil circulation system using Royal Purple oil. It is kept at 60C by a
heat exchanger capable of both heating and cooling. Inside the vessel, the flange also supports an
inboard sodium-wetted bearing.
Each bearing assembly also contains a custom-made mechanical cartridge seal for making a
seal where the shaft enters the sphere. The inboard side of the cartridge has an inner bellows which

39
compresses a ceramic mechanical seal to prevent sodium from leaking out of the vessel along
the shaft. On the outboard side is a cavity flooded with oil. The oil is a hydro-cracked mineral oil
made by Conoco which is circulated through the cavity to provide both lubrication and temperature
control of the seal face. The oil is pressurized to 30 psi above the sodium pressure so that, in case
of a leak, oil flows into the sphere rather than sodium flowing out. A second ceramic mechanical
seal prevents oil from leaking to the outboard side of the cartridge seal. Outside the second ceramic
seal is a cavity that is flooded with argon gas to keep the oil from oxidizing. To the outboard side
of the argon cavity is a static Graphoil packing.
A turbulent flow is generated by two 30.5 cm diameter helical impellers. The impellers are
described in detail in Sec. 4.1 and shown in Fig. 4.2. They are driven by two 100 hp (75 kW) ac
motors. Since the motors generate magnetic fields that would be considered noise in the experi-
ment, they are connected to the drive shafts by torque tubes so as to allow them to be placed away
from the experiment. The motors are individually powered by variable frequency drives (VFDs)
which provide an adjustable range of impeller rotation rates between 180–1780 rpm (3–30 Hz).
The magnetic Reynolds number based on the tip speed of the impellers is
Rmtip = µ0σa rimp 2πf, (3.1)
where f is the rotation frequency. The range of Rmtip is between 18–180. The rotation rate of
the impellers is measured by optical encoders. The VFDs provide torque and power estimates.
The motor power follows a cubic relationship with rotation rate as shown in Fig. 3.4 as expected
for turbulent flow [Batchelor, 1970]. The sphere is pressurized up to 100 psi with argon gas to
suppress cavitation as described in Sec. 4.1. The motors have been operated up to rotation rates of
1300 rpm (21.7 Hz) at which point mechanical vibrations become significant.
The sphere is kept at temperatures between 98–115C to optimize Rm without freezing the
sodium. A series of thermocouples mounted to the sphere record the temperature. The temperature
is maintained by a heat exchange system running hydro-cracked mineral oil through a series of
copper tubes mounted to the surface of the sphere. The system provides 12 kW of heating and
75 kW of cooling. The surface of the sphere is covered with Kaowool insulation to reduce ambient
heat loss. Due to the stress induced by thermal expansion of the stainless steel, the sphere is heated

40
0 20 40 60 80Power [kW]
0
50
100
150
200
Rm
(ba
sed
on ti
p sp
eed)
Motor 1Motor 2
Figure 3.4 The power required to rotate the impellers scales as the cube of the rotation rate. Thedashed curve shows an extrapolation up to the rated power of the motors.

41
from room temperature up to 120C over the course of five hours before it is filled with sodium.
Although the sphere needs to be heated before filling it, it needs to be cooled while the motors are
running. Heat introduced to the sodium by the rotating impellers is removed through the surface
of the sphere by the heat exchange system.
A series of stainless steel drip trays are mounted beneath the experiment. Should there be
a sodium leak, the trays are sloped to bring the molten sodium to an easily accessible storage
reservoir where the fire may be extinguished. The trays are wired with the sodium leak detectors
described in Sec. 3.2.
3.4 Expansion tank
Sodium expands with increasing temperature and so an additional pressure vessel, called the
expansion tank, is connected to the top of the sphere. When the sphere is being filled, the sodium
rises from the bottom of the sphere until the liquid level reaches to the expansion tank above the
sphere. The expansion tank accommodates changes in the volume of the sodium due to variation
in temperature. The liquid level in the expansion tank is monitored using three electrodes like the
ones described in Sec. 3.2. The expansion tank is heated with Calrods and insulated with mineral
wool. The expansion tank is connected to the pneumatic pressure system described in Sec. 3.6 to
provide a means for sodium transfers and for pressurizing the sphere to suppress cavitation (see
Sec. 4.1).
3.5 Melt station
A melt station was constructed for heating the sodium drums and pneumatically transferring the
sodium to the holding tank. The melt station consists of an over-pack drum placed on top of a scale
which records the weight change as the inventory of sodium is transferred. The scale uses strain
gauge load cells which generate an electronic measurement of the weight. The over-pack drum
provides protection in case of a spill; if the drum should rupture, the sodium is allowed to collect

42
in the over-pack upon which a lid is placed to extinguish the resulting fire through suffocation. The
over-pack drum and scale are placed within a large stainless steel drip tray for added safety.
To melt the sodium, the walls of the drum were heated using three industrial band heaters. The
bottom of the drum was also heated with five 3 kW electric heating elements. The bottom heating
elements were mounted to springs to bring them in good thermal contact with the drum. The drum
was instrumented with thermocouples for monitoring temperature and then wrapped with ceramic
fiber insulation. The 30 gallon drums had two ports fitted with Swagelok valves. One port had an
internal tube running to the bottom of the drum. This port was fitted with a stainless steel flexible
hose connected to a pipe leading to the holding tank. The other port was supplied with pressurized
argon to back purge the drum as sodium was conveyed out through the flexible hose. The 55 gallon
drums lacked an internal tube for conveying sodium and so a lance was constructed from 3/4 inch
stainless steel tubing. Once the sodium was molten, the lance was inserted through the drum’s top
bung.
3.6 Pneumatic transfer system
The sodium is conveyed from the drum to the holding tank pneumatically. Since the 30 gallon
drums are rated for moderate pressures, sodium can be transferred by applying pressure to the top
of the drum and forcing the sodium up through the internal tube, through the transfer pipe, and
into the holding tank. Argon gas is used to provide the pressure so as to prevent the sodium from
oxidizing. The argon is supplied by a manifold of 3000 psi pressurized argon cylinders with a 100
psi regulator. The main supply line runs throughout the lab to provide 100 psi of argon gas for
various applications. A precision low-pressure gas regulator local to the melt station controls the
fine adjustment of the drum pressure. The gas displaced in the holding tank escapes through a vent
line; a check valve prevents air from entering the holding tank through the vent.
The 50 gallon drums are not rated for pressure and so the sodium must be drawn out of the
drum by reducing the holding tank pressure. A Welch Duo Seal roughing pump is used to pump
down the holding tank to a few psi below gauge pressure (1 atm). The pressure difference draws

43
sodium up through the lance that was inserted after melting the sodium, and the displaced volume
is filled with low-pressure argon.
The equipment and techniques developed in the process of melting and transferring sodium
from the drums to the holding tank are also used in transferring sodium from the holding tank to
the Sphere.
3.7 Magnetic sensors and data acquisition
The magnetic field is measured using Hall-effect probes (Analog Devices AD22151 Linear
Output Magnetic Field Sensors) on integrated circuits with internal temperature compensation. The
signal gain, is set by a voltage divider on the circuit board to about 6.8 µT/mV; the probes saturate
at ±17 mT. The signals are sent through a low-pass filter to reduce the noise level. Since the
stainless steel sphere shields the probes from frequencies higher than the skin-effect frequency, the
low-pass filter is designed to have a roll-off frequency below the skin-effect frequency. Stainless
steel has a resistivity of η ∼ 7.2 × 10−7 Ωm, and from Tab. 3.1 the sphere thickness is 1.6 cm
so that the skin frequency is fskin ∼ (πµ0σd2)−1 ∼ 1 kHz. The roll-off frequency of the probes
is 100 Hz which is sufficiently high to resolve frequencies at which resistive dissipation becomes
important, estimated to be fσ ∼ Rm/τσ ∼ 50 Hz [Nornberg et al., 2006b].
Single-chip circuit boards are mounted on insulating standoffs within a stainless steel housing
as seen in Fig. 3.5(a). The probes require 5 V DC power and generate a signal between 0–5 V. The
5 V is provided by a regulated power supply. The power and signal leads are connected to isolated
BNC feedthroughs on the housing. The 5 V power is delivered to the probe on a 30–35 ft coaxial
cable with BNC connectors. The shield on the power supply cable is not connected to the chip to
prevent a ground loop. The signal runs along another coaxial cable to the data acquisition system
described below. The probe housings are mounted to the sphere using a single 1/4” stainless steel
stud, and the probes are oriented so as to measure the radial component of the magnetic field.
Eight of the probes are also placed on the bearing assembly to measure the axial component of the
magnetic field. The full array of probes are capable of resolving spherical harmonic modes up to a
polar order of ` = 7 and an azimuthal order of m = 5. The single-chip probes were calibrated in

44
Figure 3.5 (a) Hall probe assembly for probes mounted on the surface of the sphere. (b) Arrayof ten Hall probes for use within the sphere. (c) Internal Hall probe array assembly. (d) Stainlesssteel tube (1/2 inch OD) into which the internal Hall probe circuit board is mounted. (e) Stainlesssteel tube (3/4 inch OD) which serves as a sheath for the internal Hall probe assembly.

45
a solenoid with a known field strength; measurements were also compared with measurements by
an F. W. Bell Model 5080 gauss meter.
In addition to the single-chip probes on the surface of the sphere, multiple-chip arrays of probes
were constructed for internal field measurements. Ten chips are placed on a circuit board in a
linear array as seen in Fig. 3.5(b–c). They share common ground and power buses. The circuit
board is press fit into the 1/2” stainless steel tube seen in Fig. 3.5(d) which is mounted within the
3/4” stainless steel outer tube seen Fig. 3.5(e). The 3/4” tube is mounted to the Greylock port
on the sphere using a Swagelok compression fitting and extends radially into the sphere. The
1/2” tube can be rotated within the 3/4” tube so that either the poloidal or toroidal field can be
measured. The ground, power, and signal leads are connected to an RJ-45 feedthrough and run
to the data acquisition system along an unshielded CAT5 cable. The cable and connectors used
on the internal probes were chosen due to cost and expediency. The degradation in signal-to-
noise ratio is slight and determined to be acceptable given that the fields measured inside the flow
are expected to be a factor of Rm greater than the applied magnetic field. The 3/4” stainless
steel tubes encasing the internal sensor arrays vibrate when the impellers are driven at rotation
rates above 15 Hz (Rmtip = 90). Since the amplitude of the vibrations increases with flow speed,
experiments are limited to the lower rotation rates to prevent damaging the tubes and risking a
breach. A comparison of data from experiments before the internal arrays were installed with data
from experiments with the tubes indicates that the disturbance in the flow due to the tubes has
negligible effect on the large-scale induced magnetic field. The internal probes were calibrated
in situ by reconstructing the magnetic field generated by the external coils using the surface Hall
probe array. Since most of the probes on the internal array all lie in the same meridian, the array
is only capable of resolving the axisymmetric part of the mean magnetic field. The internal probes
are also used for studying the frequency spectrum of the magnetic field generated by turbulent
fluctuations.
Data from the magnetic probes is sampled by five National Instruments M Series PCI-6224
16-bit digitizers on PCI-based data acquisition cards. Each card has a single analog-to-digital
converter (ADC) multiplexed between 32 channels. The sample clock on the first addressed card

46
is routed to each of the other cards on an internal bus so that the ADC samples across cards are
synchronized. Each ADC has a maximum sample rate of 250 kHz. After multiplexing the ADC,
each channel is sampled at a rate of 1 kHz. The sample rate is sufficient to resolve fluctuations due
to eddies down to the resistive dissipation scale. The entire data acquisition circuitry, including
the computer and the rack it is mounted to, runs on a separate ground line that runs to the main
grounding pole in the laboratory. The ground can be disconnected by a knife switch to aid in
checking for ground loops. Such checks are performed on each run day before the experiments are
performed.
Data from the cards is acquired by a LabView routine with the National Instruments drivers.
The LabView program can be run from the workstation in the control room as well as from the data
acquisition computer in the lab. The cards store the data to an on-board buffer; the LabView routine
runs in a loop to check the status of the buffer. When the buffer is half full, the data is written from
the buffer to a binary file on the hard disk. Once the data acquisition is complete, the data are
read from the binary file, converted from voltage measurements to magnetic field measurements
based on the calibration information for each probe, and written to a Common Data Format (CDF)
database. In addition to the magnetic field measurements, each dataset CDF contains information
on the probe positions, orientations, calibration values, and external coil current. From this data,
the magnetic field is reconstructed using the technique outlined in Sec. 5.3.
3.8 External field coils
Measuring the induction effects of the turbulent flow requires the presence of a sufficiently
strong seed magnetic field. Various seed field geometries are generated by two sets of external field
coils. One pair of coils in a nearly Helmholtz configuration is coaxial with the axis of rotation. The
other two coils are perpendicular to the symmetry axis and are further apart. Two knife switches
are used to change the coil configuration to produce either coaxial dipole, coaxial quadrupole,
transverse dipole, or transverse quadrupole fields. A DC power supply provides up to 600 A to the
coils. The maximum applied field strength is 15 mT on axis for the coaxial dipole configuration.
The coil current is measured by an F. W. Bell CLN-1000 closed-loop Hall effect current sensor and

47
recorded to the Lookout historical database. The coils are water-cooled by a Neslab chiller outside
the laboratory.
3.9 Safety equipment
3.9.1 Protective clothing and gear
Each person who enters the laboratory while there is sodium in the sphere is required to wear
several items of protective clothing and gear. All clothing, including jacket, pants, socks, and
undergarments, are made of a fireproof material called Nomex. Steel-toed boots with chemical
resistant soles are required footwear. Chrome leather spats, gauntlet-style gloves, and apron pro-
vide some protection in the event of a spray of liquid metal. A hard hat with protective shield is
worn along with HEPA masks with organic cartridges and dust filters to protect against the caustic
smoke generated in a sodium fire.
3.9.2 Scrubber system
One of the hazards of liquid sodium is that it produces copious amounts of smoke when ignited.
The smoke is the result of a reaction with the moisture in the air and contains sodium oxide,
a caustic particulate. In the event of a fire, the smoke is eliminated from the laboratory by the
scrubber system. The scrubber system acts as a large fume hood for the entire room, drawing air in
through a large vent by means of a blower located outside the lab. The blower draws smoke out of
the room and fresh air in through vents in the far wall. The sodium oxide particulates are removed
from the smoke as it passes through a venturi wet air scrubber. Water in the venturi reacts with the
sodium oxide to produce sodium hydroxide which drops out of the venturi into a storage tank. The
cleansed air proceeds out of the room through the blower and out a chimney. The scrubber can
be started from pushbuttons located inside the lab, just outside each entrance to the lab, and in the
control room.

48
3.9.3 Fume hood for small sodium fires and material tests
A fume hood was constructed for melting small quantities of sodium to test fire-fighting tech-
niques and material compatibility with liquid sodium. The fume hood was originally completely
made of steel, but the bottom was cut out and replaced with a 3 inch deep stainless steel tray. The
fume exhaust was connected to a input port on the scrubber system and slots were cut into the back
wall of the fume hood to draw smoke away from the working area.
Sodium was melted in small stainless steel beakers on an electric hotplate. It was observed
that solid sodium would quickly form a brittle white coating of sodium oxide. When heated to
98C, the sodium would become molten beneath the sodium oxide layer. The sodium would not
self-ignite until it reached a temperature of about 120C. Once ignited however, the fire would heat
the sodium and continue to burn. The fire was easily extinguished through suffocation by placing
a lid on the beaker, though it quickly reignited when the cover was removed. The fire could be
extinguished by covering the sodium with soda ash, though after a time the sodium would wick up
through the ash and reignite. The fire was completely extinguished after several layers of ash were
applied and the temperature of the sodium fell below 120C.
3.9.4 Sodium cleaning station
Once a component of the experiment, such as a valve or length of tubing, is exposed to sodium
the component must be cleaned to remove any remnant sodium. Many of the components have
delicate parts which can be damaged by the heat generated by the reaction with water, so ethanol
is used instead. Ethanol has a much milder reaction with sodium, forming sodium ethoxide by
liberating hydrogen, and is used as an intermediary in the cleaning process. Valves, tubes, and
other components are cleaned internally by connecting them to an ethanol circulation loop. The
loop consists of a reservoir, a centrifugal pump, and an air bleeder which releases the hydrogen
generated from the reaction.
Once a component has been cleaned with ethanol, it is flushed with water and dried with a heat
gun. The remaining mixture of ethanol and sodium ethoxide is a very strong base that must be

49
neutralized with hydrochloric acid before disposal. All tasks performed with the ethanol and solid
sodium require the use of chemical gloves, apron, and goggles.

50
Chapter 4
Hydrodynamic experiments to model the flow
The overarching strategy of the Madison Dynamo Experiment is to develop a model of the fluid
flow for predicting both the self-excitation of magnetic fields and the inductive response to an exter-
nally applied magnetic field. Ultimately, this flow model must account for the effects of turbulence
on the magnetic fields induced by the flow in relation to both modifications to the threshold for
magnetic field growth (i.e. modifications of Rmcrit) and modifications to the saturation mechanism
which halts the exponential field growth.
The first step to this approach, however, is to create a laminar model of the flow. The laminar
model is constructed from measurements of the mean flow in water in a vessel identical in scale and
geometry to the liquid sodium experiment. This laminar model is then used to create a quantitative
prediction of the magnetic field induced by the flow when an externally generated magnetic field is
applied. Likewise, the conditions for which the flow will generate a magnetic field are determined.
The laminar prediction is then compared with the measurements of the induced magnetic field in
the sodium experiment to quantify the contribution from fluctuations in the flow due to turbulence.
4.1 Description of the water experiment
Liquid sodium at a temperature in the range 98–115C has the same kinematic viscosity as
water in the range 32–38C and a similar density (see Tab. 3.1). Flows established in water by
identical impellers in a spherical vessel of the same size should therefore reproduce the flow estab-
lished in the sodium experiment excepting modifications to the flow due to the Lorentz force. For
sufficiently weak magnetic fields the effects on the large-scale flow should be negligible.

51
Figure 4.1 Photo of the water experiment with the laser Doppler velocimetry system. The opticalprobe for the laser system is mounted to a traverse and can be positioned in front of each of thewindows on the sphere. An impeller is mounted to the drive shaft in the foreground. The shaftenters the sphere through a mechanical cartridge seal on the flange in the picture. A pressuretransducer on the seal monitors the vessel pressure. A thermocouple enters the sphere through aflange on the right and provides temperature measurements.

52
Figure 4.2 Photos of a single impeller and both impellers mounted to the drive shaft assembly inthe water experiment. The Kort nozzle ring on each impeller is 12” (30.5 cm) in diameter.

53
These hydrodynamic experiments are conducted in a 42 inch (1 meter) diameter stainless steel
sphere shown in Fig. 4.1. The two horizontal drive shafts, each supported by two bearing sets, enter
the sphere and establish the symmetry axis of the flow. The end of each shaft has been machined
to create a spline keyway onto which the impellers are mounted. The spline keyway provides
more stable support and less rattle than the traditional square key design. The impellers, shown in
Fig. 4.2, are modified stainless steel, square-pitched1 boat propellers. The edge of each impeller is
machined to a radius of 6 inches to accommodate a 4 inch wide outer stainless steel ring. This outer
ring, known as a Kort nozzle, focuses the thrust from the impeller in the axial direction to generate
a large poloidal flow cell. Three 0.5-inch-tall (1.3 cm) stainless steel blocks are welded to the
outside edge of the Kort nozzle to increase the toroidal thrust of the impeller. The impeller design
is the result of a series of empirical flow studies carried out by Rob O’Connell and Jon Goldwin
[Goldwin, 1999]. Their studies were conducted in a 30 cm Pyrex sphere. The analysis of flows in
both the small-scale and the full scale water experiments concluded that the ratio of the poloidal
flow speed to toroidal flow speed is a critical parameter governing the threshold of magnetic field
growth [O’Connell et al., 2000; Forest et al., 2002]. The impeller pitch, which controls the ratio of
poloidal to toroidal thrust, is designed to minimize the flow speed required to produce a dynamo.
Each impeller is dynamically balanced to reduce vibrations and flow distortions due to shaft runout.
The impellers are held onto the shafts by a double nut; the second nut is a flex-top locknut which
keeps the first nut from loosening off the shaft during rotation. The entire drive shaft assembly is
identical to the drive shafts used in the sodium experiment with the exception of the handedness of
the helical impellers2.
The impellers are driven by two 60 hp (45 kW) motors independently controlled by two variable
frequency drives (VFDs). The VFDs are operated remotely using the Modbus serial communica-
tion protocol within National Instrument’s Lookout industrial automation software. The motors
have been operated up to a rotation rate of 1200 rpm (20 Hz). At these speeds the motors over-
heat within several minutes, and so the maximum speed for which there is complete flow data is
1Square-pitched propellers advance a distance equal to their diameter in one rotation2As a result, the impeller rotation directions are reversed between experiments to preserve the same flow geometry.

54
1000 rpm (16.7 Hz). The rotation rate is measured by optical encoders mounted to the ends of the
drive shafts. The measured rotation rates are used in a feedback algorithm in the Lookout motor
control routine to periodically update the requested rotation rate sent to the VFDs. In this way, a
consistent and balanced flow profile is maintained (see Sec. 3.1 for a description of the automa-
tion of the experiment). Before implementing this control algorithm, it was found that the fluid
coupling between the two impellers could change the actual rotation rate of the motor from the
requested rate.
The fluid cavitates at high impeller rotation rates. The local pressure of the fluid near the
impeller’s trailing edge drops below the vapor pressure of the fluid and vapor bubbles are formed.
The bubbles eventually collapse due to the pressure of the surrounding fluid. This collapse is very
violent; it can lead to pitting of the impellers and disruption of flow through the impeller. The
collapse of the bubbles also generates vibrations throughout the fluid in the ultrasonic frequency
range which is monitored by an ultrasonic transducer mounted to the surface of the experiment.
Cavitation can be suppressed by raising the background pressure of the fluid sufficiently high that
the pressure drop of the impeller’s edge is raised above the vapor pressure. The pressures required
for suppressing cavitation are determined empirically by monitoring the amplitude of fluctuations
on the ultrasonic transducer as the vessel pressure is both raised and lowered at fixed impeller
rotation rate. For rotation rates of 1000 rpm (16.7 Hz) the required background pressure is 80 psi.
The vessel has been operated up to 100 psi at these rotation rates without rupturing.
At impeller rotation rates above 400 rpm (6 Hz), the viscous heating is sufficient to raise the
temperature of the water thereby lowering the viscosity beyond the range comparable with liq-
uid sodium. The water temperature is monitored by a thermocouple inserted into the sphere and
recorded to the Lookout database. The temperature is moderated by stopping the motors and cir-
culating the water through a heat exchanger when the measured temperature rises above a set point
of 38C. The heat is removed from the heat exchanger by an HX-750 Neslab reservoir chiller. The
experiment resumes when the water temperature drops to 32C.
The sphere has five Pyrex windows along a single meridional line across the top of the sphere
as shown in Fig. 4.3. The windows allow measurements of the velocity profile in a single toroidal

55
plane using an optical measurement technique called laser Doppler velocimetry 3 (LDV) which is
described in Sec. 4.2.
4.2 Laser Doppler velocimetry
Laser Doppler velocimetry is an optical measurement technique widely used in turbulent flow
experiments. Bachalo [1985] provides a thorough explanation of the technique. To summarize,
two laser beams are focused by a fiberoptic probe and converge at a point in the flow. At this
measurement point, the interference from the two beams create a fringe pattern of alternating
intensity with a fringe spacing of
δ =λ
2 sin θ/2(4.1)
where λ is the wavelength of light and θ is the angle between the intersecting beams. The fluid
is seeded with reflecting particles which pass through the measurement volume and reflect the
incident light. The intensity of the reflected light varies as the particle traverses the fringe pat-
tern generating a signal with a frequency dependent upon the speed of the particle. A velocity
component of the particle is then calculated from this measured Doppler frequency.
The particular hardware used in this experiment is a two-component LDV system made by TSI
corporation and a Model 2025-05 5 Watt continuous-wave Spectra-Physics argon-ion laser. The
laser generates a multi-line beam with dominant wavelengths at 514.5 nm (green) and 488.0 nm
(blue). The two colors are separated into four separate beams, two of each color, by a Model 9201
Colorburst Beam Separator. Bragg cells are used to shift the frequency of one beam of each color
by about 40 MHz which causes the fringe pattern in the measurement volume to move. The mo-
tion of the fringe pattern shifts the signal frequency so that the signal from particles moving in one
direction can be distinguished from the signal from particles moving in the opposite direction. The
beams travel along fiberoptic cables to a Model 9253-350 Fiberoptic Probe which focuses each of
the beams to intersect at a single measurement point. Each color pair of laser beams measures a
single velocity component; green is used to measure vθ and blue is used to measure vφ. The light
reflected directly back from particles in the measurement volume to the fiberoptic probe travels3In some of the literature, this technique is also known as laser Doppler anemometry.

56
through a fiberoptic cable to a 9230 Colorlink Plus Multicolor Receiver. The receiver has two
photomultiplier tubes (PMTs). The green and blue light is separated using color filters and sent
to each PMT. The electronic signal from each PMT is sent to an IFA 755 Digital Burst Correlator
which analyzes the measured signals from both channels. The correlator determines when there
is a measurement burst from the passage of a particle through the measurement volume and cal-
culates the Doppler shift frequency from the autocorrelation of the signals on each channel. The
autocorrelator is programmed to reject measurements that are not within a window of 100 µs to en-
sure that the two velocity component measurements are from the same particle. The measurements
are recorded on a personal computer running Windows 95 and TSI’s proprietary FIND software.
For further details of each of the components and the particular settings used in the experiments,
see Spence [2006].
The fiberoptic probe is mounted to a traverse that provides both linear translation and rotation
about an axis. The combined traverse system can position the fiberoptic probe at each window at
various distances so that the measurement point can move throughout a meridional plane in the
flow, as seen in Fig. 4.3. These measurements are then used to constrain several parameters of a
numerical model of the mean flow (Sec. 4.3) and to study the velocity fluctuation statistics and
turbulent power spectra (Sec. 4.6).
4.3 Model of the mean flow
Although the impeller-generated flow in the experiment is turbulent, the mean flow can be
approximated by a laminar model. Flows in a spherical geometry are most easily modeled by
exploiting the spherical geometry of the experiment through the Bullard and Gellman [1954] for-
malism described in Sec. 2.2. Analogous to the magnetic field components in Eq. 2.8–2.10, the
three components of the velocity field expressed in terms of the spherical harmonic expansions of

57
Figu
re4.
3A
sche
mat
icof
the
wat
erex
peri
men
tan
dth
eL
DV
trav
erse
syst
em.
The
flow
iscr
eate
dby
two
impe
llers
driv
enby
two
45kW
mot
ors.
The
sphe
reha
sfiv
evi
ewin
gw
indo
ws
thro
ugh
whi
chth
eL
DV
prob
em
easu
res
the
flow
velo
city
.T
hefib
erop
tiche
adis
mou
nted
toa
trav
erse
capa
ble
ofpo
sitio
ning
the
mea
sure
men
tpoi
ntw
ithin
the
flow
.

58
the poloidal and toroidal fields are:
vr(r, θ) =∑
`
` (` + 1)
r2s`,0(r)Y
0` (θ) (4.2)
vθ(r, θ) =∑
`
1
r
ds`,0
dr
∂Y 0`
∂θ(4.3)
vφ(r, θ) = −∑
`
t`,0(r)
r
∂Y 0`
∂θ, (4.4)
where it is assumed that the flow is axisymmetric (m = 0). The model of the flow is constructed
by curve fitting the LDV data to Eqs. 4.2–4.4 where s`(r) and t`(r) are parameterized by cubic
splines as described in Spence [2006].
An example of the time series measurements of vθ and vφ taken at a point in the turbulent
flow is shown in Fig. 4.4. The data are taken from a flow generated with an impeller rotation rate
of 1000 rpm (16.7 Hz). The water temperature was maintained between 32–38C and the vessel
pressure was maintained at 80 psi to suppress cavitation. The average velocity is determined from
time series measurements throughout the flow as shown in Fig. 4.5. These values are used to
construct the mean flow model. Even harmonics ` = 2, 4, 6, 8 are used for the toroidal profiles
and harmonics ` = 1, 2, 4 are used for the poloidal profiles in Eqs. 4.2–4.4. Other harmonic
components such as ` = 3 tend not to improve the fit to the data and are not used. Each profile has
four spline knots. A contour plot of the reconstructed velocity field is shown in Fig. 4.6. The ` = 2
poloidal and toroidal profiles are the strongest components and result in the two poloidal and two
toroidal flow cells. The direction of the flow is inward at the equator and outward toward the poles
of the sphere. The full three-dimensional flow is composed of two counter-rotating helical vortices
with a strong shear layer at the equator. From this flow model, the growth rate of the magnetic
field and the fields induced from an externally applied magnetic field are calculated as described
in Sec. 4.5.

59
0 5 10 15 20 25 30Time [s]
−4−2
0
2
46
v φ [m
/s]
−4−2
0
2
46
v θ [m
/s]
Figure 4.4 LDV time series measurements of both vθ and vφ located at r = 0.448 m, θ = 0.60 radin the flow.

60
Poloidal
-5
0
5
θ = 0.60
-5
0
5
θ = 1.05
-5
0
5
Vel
ocity
[m/s
]
θ = 1.50
-5
0
5
θ = 1.95
0.20 0.30 0.40 0.50Radial Position [m]
-5
0
5
θ = 2.41
Toroidal
θ = 0.60
θ = 1.05
θ = 1.50
θ = 1.95
0.20 0.30 0.40 0.50Radial Position [m]
θ = 2.41
Figure 4.5 Radial profiles of LDV measurements of the mean flow in the water experiment. Errorbars represent the rms velocity fluctuation level; the experimental uncertainty is very small dueto long time averages. The solid lines indicate the profile of the reconstructed velocity field. Thecolors coincide with the measurement positions shown in Fig. 4.6.

61
-4.9 -2.5 0.0 2.5 4.9Speed [m/s]
0.1 0.2 0.3 0.4 0.5Radial Position [m]
0.00
0.05
0.10
Pol
oida
l
S1S2S4
0.0
0.5
Tor
oida
l
T2T4T6T8
vpol
vφ
Figure 4.6 A contour plot of the mean velocity field reconstructed from LDV measurements in thewater experiment (top) with the poloidal and toroidal radial profiles used to construct it (bottom).The flow primarily is composed of t2 and s2 components.

62
4.4 Velocity fluctuations
Although the flow has a well defined mean as seen in Fig. 4.6, the measured fluctuation levels
shown in Fig. 4.4 and Fig. 4.5 are quite large. On average, the rms fluctuation level is about 50%
of the mean velocity.
The probability distribution function is calculated from a histogram of the time series measure-
ments of v and is shown in Fig. 4.7. The fluctuations appear to be well described by a Gaussian
profile as expected from a stationary turbulent flow according to the central limit theorem [Batch-
elor, 1970; Tennekes and Lumley, 1972]. The presence of non-Gaussian features would indicate
that intermittency effects were more important than the statistics of the integral scale eddies gen-
erated by the impellers [Falkovich et al., 1996; Falkovich and Lebedev, 1997]. The fact that the
distributions are Gaussian also indicates that the measurements are taken over a sufficiently long
time to give good estimates for the average velocity.
The spatial distribution of the rms velocity fluctuation levels is shown in Fig. 4.8. As expected,
the fluctuation levels are quite strong near the impellers and get weaker near the surface of the ves-
sel. Consequently, the turbulence is not homogeneous throughout the fluid volume. The interaction
of the fluid turbulence with a magnetic field in the sodium experiment may differ from regions of
strong fluctuations to regions of weak fluctuations.
4.5 Kinematic growth rate of the magnetic field
As mentioned in Sec. 2.7.1, due to the presence of large-scale eddies the flow is expected
to occasionally satisfy Rm > Rmcrit and produce intermittent magnetic field excitations. To
estimate the likelihood the flow is self-exciting, the kinematic growth rate from the model of the
mean velocity field in Sec. 4.3 is calculated. The solid line in Fig. 4.9 shows the results of the
calculation using the mean flow. From the mean flow model, the critical threshold for field growth
is Rmcrit = 190. whereas the dashed line shows the growth rate calculated for an optimized
flow geometry similar to and within the fluctuation levels of the measured flow [O’Connell et al.,
2000]. The region between the growth rates of the mean and optimized flows indicates the range

63
−4 −2 0 2 4 6 8Velocity [m/s]
10−4
10−3
10−2
10−1
100
PD
F
vθ Mean: 1.48StdDev: 1.24
vφ Mean: 1.70StdDev: 1.01
Figure 4.7 Probability distribution function of LDV measurements in Fig. 4.4. The solid curvesare Gaussian curve fits to the distributions.

64
0.0 1.3 2.6 3.9 5.2<v2> [m2/s2]
0.1 0.2 0.3 0.4 0.5Radial Position [m]
-20
-10
0
10
20
30
Rad
ial W
eigh
ting
S1S2S3S4S5
Figure 4.8 Contour plot of velocity fluctuation levels constructed from LDV measurements (top)and the poloidal radial profiles used to construct it (bottom).

65
0 50 100 150 200
-2
-1
0
1
Rm
Gro
wth
Rat
e [s
-1] ftip=16.7 Hz
ftip=13.3 Hzftip=10 Hz
Figure 4.9 Kinematic growth rate versus Rm for the mean flow measured in the water experiment(solid) and an optimized flow (dashed). The vertical lines identify Rmcrit for each case. The PDFsof Rm for flows with three different impeller rotation rates are shown to demonstrate the increasingoverlap of the ranges of Rm and Rmcrit.

66
of possible eigenmode growth rates for an instantaneous realization of the flow and the resulting
variation in Rmcrit.
The velocity fluctuations also contribute to variations in the instantaneous maximum speed of
the flow, thereby creating a range of Rm. Probability distributions of Rm constructed from the
measured velocity fluctuations for three different impeller rotation rates are plotted in Fig. 4.9. It is
expected that a greater overlap of the PDF of Rm with the range of Rmcrit will result in magnetic
field excitations with greater frequency and strength. The duration of each excitation is expected
to decrease since the correlation time of the velocity fluctuations scales as τc ∼ `/V` where ` is the
eddy scale length and V` is the characteristic speed of the eddy.
4.6 Kolmogorov turbulence
Several universal properties have been established for both hydrodynamic and magnetohydro-
dynamic turbulence which are observed in many examples from atmospheric turbulence to plasmas
in the interstellar medium. This section describes the analysis of turbulent flows in the Madison
Dynamo Experiment using power spectra of the velocity field. The effects of turbulence on mag-
netic field generation are discussed in Chap. 5.
Although the large-scale flow is adequately quantified by the mean flow model described in
Sec. 4.3, a turbulent flow has structure ranging over a multitude of scales due to a cascade of
local interactions. Eddies at a particular scale transport energy to eddies at a slightly smaller scale
through vortex tube stretching [Tennekes and Lumley, 1972, Chap. 8]. Of particular interest is the
energy spectrum defined as Ev(k) = |V(k)|2 where
V(k) =
∫v(r)e−ik·r dr (4.5)
is the Fourier transform of the magnitude of the velocity field. From Plancherel’s Theorem, we
find that the kinetic energy per unit mass Ev is related to the energy spectrum by
Ev =
∫v2(r) dr =
∫V2(k) dk =
∫Ev(k) dk. (4.6)
The energy spectrum is also related to the correlation tensor
Rij(δr) = 〈vi(r)vj(r + δr)〉 . (4.7)

67
From the Weiner-Khinchin Theorem [Frisch, 1995, Sec 4.5], the autocorrelation function Rjj(δr)
is the Fourier transform of the energy spectrum, i.e.
Rjj(δr) =
∫Ev(k)e−ik·δr dk. (4.8)
This relationship between the autocorrelation function and energy spectrum will be used in Sec. 4.7
to obtain the energy spectrum from LDV measurements.
The energy spectrum that develops in fully developed turbulence can be described under several
assumptions by scaling laws derived by Kolmogorov [Frisch, 1995; Batchelor, 1970]. It is assumed
that there is a range of scales for which small eddies evolve on time scales faster than the mean
flow so that they have adequate time to reach equilibrium within the local mean flow. The energy
transfer between scales in this range is therefore independent of the details of the large-scale mean
flow, including driving forces and boundary conditions. Under this assumption, the symmetries
of the Navier-Stokes equation, specifically homogeneity and isotropy, are realized in a statistical
sense at the small-scales.
In the equilibrium range, the kinetic energy spectrum Ev(k) should depend only on the energy
dissipation rate per unit mass ε and the viscosity ν, i.e. Ev = Ev(k, ε, ν). Although a more rigorous
derivation of the kinetic energy spectrum can be made without making such a strong assumption,
the resulting spectrum is correct to within a proportionality constant [Frisch, 1995, Chap. 6]. With
ε and ν as the only relevant scaling parameters, the length scale at which viscous diffusion becomes
important, also known as the Kolmogorov microscale, is given by dimensional analysis:
`ν = ν3/4ε−1/4 ∼ Re−3/4L. (4.9)
The corresponding wavenumber is kν = `−1ν . Eddies at scales smaller than `ν are viscously damped
so k > kν is labeled the viscous dissipation range. In this range, the velocity energy spectrum drops
off quickly making `ν the minimum size for eddies that are important to the dynamics of the flow.
For wave numbers k < kν , the eddies evolve independently of the viscosity; their evolution is
governed by inertial terms in the Navier-Stokes equation. The resulting energy spectrum depends
only on the wave number k and the rate of energy dissipation per unit mass ε. Dimensional analysis

68
Symbol Description Value Units
f impeller rotation rate 16.7 Hz
rimp impeller radius 0.153 m
vtip tip speed 16 m/s
P total motor power 40 kW
ε energy dissipation rate 70 (m/s)2
vrms rms velocity 3 m/s
Re Reynolds number 2× 104
Rmtip magnetic Reynolds number 100
`ν Kolmogorov microscale 3× 10−4 m
Table 4.1 Turbulence characteristics of flows measured in the water experiment.
yields the Kolmogorov energy spectrum
Ev(k) = Cε2/3k−5/3 (4.10)
where C is called the Kolmogorov constant. The Kolmogorov energy spectrum is seen in many
different types of turbulent flow and is the expected scaling for turbulence in the water experi-
ment. Assuming that the magnetic field is sufficiently weak that the resulting Lorentz forces are
negligible, it is also expected that the velocity spectrum for the turbulent sodium flow follows the
Kolmogorov scaling. Conversely, a deviation from this scaling law is evidence that the magnetic
field is sufficiently strong to affect the flow and suggests that the dynamo has entered the saturation
regime.
In Fig. 3.4 the power required to drive the motors at 16.7 Hz, corresponding to Rmtip = 100,
is about P = 20 kW per motor. If we ignore the power that is dissipated in the drive assembly and
assume that all of the power is used in generating the flow, then the energy dissipation rate per unit
mass is
ε =P
43πa3ρ
= 70 m2/s2. (4.11)

69
where ρ and a are given in Tab. 3.1. Using ε ∼ v3rms/a as an order of magnitude estimate for the
energy dissipation rate per unit mass [Frisch, 1995, Sec. 5.2], the characteristic flow parameters
are calculated and presented in Tab. 4.1. The rms speed is vrms = 3 m/s and the Reynolds number
is Re = 2 × 104. From Eq. 4.9, the viscous dissipation scale is `ν = 0.3 mm. The inertial range
in both the sodium experiment and the water model experiment is therefore expected to be about
four decades wide with very small boundary layers at the sphere surface and near the impellers.
Velocity measurements are usually made at a single point, or multiple points, over a period of
time. The frequency spectrum of the resulting time series signals can be predicted from knowledge
of the wavenumber energy spectrum of turbulence. The energy as calculated from a time series
measurement of the velocity is given by
Ev =
∫ T
0
|v(t)|2 dt =
∫|V(f)|2 df. (4.12)
where V(f) is the Fourier transform of v(t). Since the flow is being driven, there is a constant flux
of energy and the integral in Eq. 4.12 grows as T → ∞. Since the velocity is a time-stationary
signal the average energy per time, or average power, is expected to converge to a mean value given
by⟨v2
⟩= lim
T→∞1
T
∫ T
0
|v(t)|2 dt =
∫S(f) df (4.13)
where S(f) is the power spectral density (PSD)
S(f) = limT→∞
1
T|V(f)|2 (4.14)
which is a measure of the distribution of the signal power over frequency space.
The frequency spectrum can be related to the wavenumber spectrum of velocity fluctuations
by a dispersion relation. Traditionally in turbulence research a hypothesis is invoked which asserts
that the velocity fluctuations in the measurement volume are due to the advection of small eddies
by the mean flow [Taylor, 1938]. The resulting dispersion relation is 2πf = v0k where v0 is the
mean velocity. Substituting this relation into Eq. 4.10 yields
Ev(f) = Cε2/3
(2πf
v0
)−5/3
. (4.15)

70
The predicted power spectral density is thus
S(f) =C
∆Tε2/3
(2πf
v0
)−5/3
(4.16)
where ∆T is the total length of the time series. Under conditions for which the Taylor hypothesis
is valid, the spectrum should have the power law relation S(f) ∝ f−5/3.
There are, however, various reasons why the Taylor hypothesis is insufficient for predicting
the wavenumber spectrum [Pinton and Labbe, 1994; L’vov et al., 1999]. First, it is valid only if
there is an identifiable homogeneous mean flow sweeping eddies past the measurement point. The
turbulent flow being studied, however, has turbulent eddies ranging up to the largest scale of the
flow with velocity fluctuations on the same order as the mean flow speed. Second, the hypothesis
is valid only if the decay time of an eddy is slow compared with the sweeping time of the eddy past
the measurement point. The lifetime of an eddy of size ` is well-approximated by the eddy turnover
time k−1v−1k . In the inertial range, vk ∝ k1/3 and so the ratio of the sweeping time L/v0 to the eddy
turnover time scales as k−4/3. Hence, for k À L−1, the eddy decay time becomes small compared
with the sweeping time so that the Taylor hypothesis should be applicable at sufficiently small-
scales for the wavenumber spectrum and sufficiently high frequencies in the frequency spectrum.
4.7 Measurements of the velocity spectrum
Time series measurements of two components of the velocity are obtained as described in
Sec. 4.2 at a single measurement location in the flow. A measurement is made when the LDV
signal correlator successfully measures both components of the velocity within a time window
set by the user. The success of the measurement depends on a number of factors including the
presence of a reflecting particle in the measurement volume, sufficient intensity of reflected light
for the detector, signal processor dead time, etc. As a result, the arrival time of LDV measurements
is random, and the velocity measurements are irregularly spaced in time. In fact, the probability
distribution function of the arrival time of particles in the measurement volume is quite adequately
modeled by the equation
p(δt) = ne−nδt (4.17)

71
0 10 20 30 40 50Arrival Time [ms]
0.001
0.010
0.100
1.000
PD
F
Mean Arrival Time: 18 ms
Figure 4.10 The probability distribution function for the time between LDV measurements dueto the random occurrence of particles traversing the measurement volume. The dotted line showstheoretical estimate given in Eq. 4.17.
where n is the mean rate of arrival and δt is the time interval between measurements. The proba-
bility distribution function of the particle arrival time is shown in Fig. 4.10 with a fit to Eq. 4.17.
The derivation of this relation can be found in Nobach et al. [1998].
In addition to irregular sampling, the rate of measurements is correlated to the velocity. A
greater number of particles pass through the measurement volume at higher flow speeds thereby
increasing the sampling rate. Hence, estimations of the moments of the velocity probability distri-
bution based on LDV measurements can be biased toward higher speeds.
Several techniques for estimating velocity spectra from LDV measurements have been devel-
oped and are reviewed in Benedict et al. [2000]. The procedure used to determine velocity spectra
is outlined here. First, an interpolation of the velocity measurements v′(t) is created from the
N velocity measurements vi taken at times ti by using “sample and hold” interpolation. In this
scheme, the last valid measurement is used to estimate the velocity so that
v′(t) = vi for ti ≤ t < ti+i and i = 0, . . . , N − 1. (4.18)
An example of the interpolated velocity is shown in Fig. 4.11. The velocity is interpolated onto a
regular grid of 216 points with time resolution ∆τ = 832 µs so that v′i = v′(i∆τ).

72
0.0 0.1 0.2 0.3 0.4 0.5Time [s]
−2
0
2
4
6
v θ [m
/s]
Figure 4.11 The irregularly sampled LDV measurements are interpolated onto a regular grid using“sample and hold” interpolation. The crosses depict the LDV measurements and the solid lineindicates the interpolated signal.

73
The new signal is prefiltered to remove the mean velocity and long timescale periodicity using
the smoothing algorithm
u′i = v′i −∑i+M
j=i−M vjwj∑i+Mj=i−M wj
(4.19)
where the weighting is based on the arrival time wi = ti − ti−1 and the number of consecutive
measurements M used in the smoothing is chosen empirically; M = 100 was used for the spectra
presented in Fig. 4.12.
The signal is then split into NB consecutive blocks which are used to generate independent
spectra that will be averaged together; NB = 10 for the spectra in Fig. 4.12. The PSD S(j) is cal-
culated for each block the fast Fourier transform (FFT) algorithm, and the autocorrelation function
(ACF) R(tk) is determined from the Wiener-Khinchin Theorem in Eq. 4.8 using the inverse FFT
of the PSD in each block. The autocorrelation function is truncated to a maximum time lag of
τmax = K∆τ with K = 2000 to further reduce the variance of the PSD estimate by eliminating the
long timescale correlations. The ACF refinement filter described in Nobach et al. [1998] is given
by
R′(tk) =
R(tk) for k = 0
(2c + 1) R(tk)− c (R(tk−1)R(tk+1)) for 1 ≤ k ≤ K(4.20)
c =e−n∆τ
(1− e−n∆τ )2 . (4.21)
The refinement filter is used to remove the filtering effects due to the “sample and hold” interpo-
lation. A new PSD is then calculated for each block of data from the FFT of R′(tk). The PSD
estimate and its variance is then calculated from averaging over the NB blocks
〈S〉 =1
NB
NB−1∑j=0
S(j) (4.22)
σ2S =
1
NB − 1
NB−1∑j=0
(S(j) − 〈S〉)2
(4.23)
The spectrum is finally smoothed with IDL’s Smooth function which performs a boxcar moving
average.

74
10−410−3
10−2
10−1
100
101
102
103
f−5/3
vθ
vφ
vθ
vφ
10−1 100 101 102 10310−410−3
10−2
10−1
100
101
102103
vθ
vφ
10−1 100 101 102 103
vθ
vφ
PS
D [m
/s/H
z]P
SD
[m/s
/Hz]
Frequency [Hz] Frequency [Hz]
(a) (b)
(c) (d)
Figure 4.12 The velocity power spectrum from LDV measurements of vθ and vφ is plotted forfour different positions. The impeller rotation rate is 1000 rpm (16.7 Hz). The measurementswere taken over the course of 30 s and so the spectrum is poorly resolved at the lower frequencies.The spectrum is consistent with the f−5/3 power-law scaling predicted for Kolmogorov turbulence.The locations are (a) in the bulk flow above and behind the impeller (r = 0.448 m, θ = 0.596 rad)(b) deep in the flow at the equator (r = 0.256 m, θ = 1.50 rad) (c) near the wall (r = 0.528 m,θ = 0.596 rad) and (d) near an impeller (r = 0.336 m, θ = 0.596 rad).

75
The resulting velocity spectrum for four different locations in the flow is shown in Fig. 4.12.
The spectrum follows the f−5/3 power-law derived in Eq. 4.15 for about two decades. Since
the viscous dissipation scale is less than a millimeter and the LDV measurement volume is on this
scale, it is not anticipated that improvements in the sampling rate through increased particle density
would resolve the viscous scale. Both vθ and vφ have the similar structure in the inertial range for
all of the LDV measurement points showing that even in the presence of a strong mean flow,
the turbulence is to some extent isotropic at sufficiently small-scales. Similar spectral structure
is observed from measurements throughout the flow, though they differ in magnitude due to the
variation of the velocity fluctuation levels (see Fig. 4.8).
4.8 Turbulent conductivity
In Sec. 2.7.2 it was shown that correlations of the small-scale eddies could contribute to a
large-scale electric field and that one of the effects of this electric field is to decrease the effective
conductivity of the fluid. This β-effect can be calculated from Eq. 2.51 using the autocorrelation
functions Rjj in Sec. 4.7. Since it was established that the turbulence is not homogeneous, β is
not simply a constant. We will assume that the turbulence is locally homogeneous, i.e. in the small
neighborhood r + r′, where r′ is much smaller than the integral scale, v(r + r′) = v(r). Under
these conditions, the β-effect term is estimated to be
β(r) =1
3
∫ ∞
0
〈v(r, t) · v(r, t− τ)〉 dτ =1
3vrms τcorr (4.24)
where β(r) is now a function over space, vrms is the rms speed at the measurement point, and τcorr
is the correlation time defined as
τcorr = |Rii(0)|−1
∫ T
0
|Rii(τ)| dτ (4.25)
and Rii(τ) is the refined ACF from Eq. 4.20. Assuming axisymmetry, we have β(r) = β(r, θ)
which can be determined from the autocorrelation functions of the LDV measurements from
Fig. 4.13. The turbulent conductivity σT can then be computed using Eq. 2.52; the value of σT /σ
at each of the LDV measurement points is plotted in Fig. 4.14 and a contour plot is shown in

76
0.0
0.2
0.4
0.6
0.8
1.0τθ= 61.07msτφ= 55.05ms
τθ=415.28msτφ=621.36ms
0 200 400 6000.00.2
0.4
0.6
0.81.0 τθ=175.26ms
τφ=104.52ms
0 200 400 600
τθ= 54.18msτφ= 61.15ms
AC
FA
CF
Time [ms] Time [ms]
(a) (b)
(c) (d)
Figure 4.13 Autocorrelation functions of LDV velocity measurements corresponding to the fourpositions used in Fig. 4.12. The correlation time is calculated for each velocity component usingEq. 4.25.

77
Fig. 4.15. Although σT is not uniform throughout the flow, on average the turbulence results in a
60% decrease in the effective conductivity of the fluid.
From Fig. 4.15 it is apparent that the effect is strongest in the shear layer at the equator. Though
the velocity fluctuation levels at the equator shown in Fig. 4.8 are fairly weak compared with the
rest of the flow, the correlation time is much longer as is evidenced in Fig. 4.13(b). This observation
is consistent with the situation described by Colgate [2006] in which the shear layer develops a
Kelvin-Helmholtz instability that governs the strength of the β-effect.

78
σT/σ
0.00.20.40.60.81.0
θ = 0.60
0.00.20.40.60.81.0
θ = 1.05
0.00.20.40.60.81.0
σ T/σ
θ = 1.50
0.00.20.40.60.81.0
θ = 1.95
0.20 0.30 0.40 0.50Radial Position [m]
0.00.20.40.60.81.0
θ = 2.41
Figure 4.14 Ratio of the turbulent conductivity σT to the molecular conductivity σ using correlatedvelocity fluctuations from LDV measurements at each point in the flow.

79
0.0 0.2 0.3 0.5 0.6σT/σ
0.1 0.2 0.3 0.4 0.5Radial Position [m]
−4
−2
0
2
4
6
Rad
ial W
eigh
ting
S1S2S3
Figure 4.15 Contour plot of σT /σ created by a curve fit of the data in Fig. 4.14.

80
Chapter 5
Comparison of measurements of the induced field with predic-tions
In this chapter, measurements of the magnetic field induced when external magnetic fields are
applied to the turbulent flow of liquid sodium are compared with the predictions made from the
velocity field model described in Chap. 4.
5.1 The predicted mean induced magnetic field
Given the model of the mean velocity field described in Sec. 4.3, the magnetic field induced by
the mean flow can be calculated using the magnetic induction equation 2.3. The magnetic field is
separated into two parts, B0 which is generated by currents in magnetic field coils external to the
fluid and Bi which is generated by currents induced by the fluid motion. Since B0 is generated by
currents outside of the sphere, µ0J0 = ∇×B0 = 0 for r ≤ 1 where r is normalized to the radius
of the sphere. Therefore, the diffusion term∇2B0 = −∇×∇×B0 = 0 for the applied field. The
resulting induction equation can be written as
∂
∂t(Bi + B0) = Rm∇× v × (Bi + B0) +∇2Bi. (5.1)
For a time-stationary flow and applied field, the induced field is expected to be time-stationary as
well provided that the flow is subcritical. The left hand side of Eq. 5.1 then vanishes when averaged
over times much longer than the diffusion time. In terms of the discretized advection and diffusion
operators described in Sec. 2.3, the induction equation is written as the matrix equation
A (Bi + B0) + DBi = 0. (5.2)

81
Solving this equation for the induced field yields
Bi = − (A + D)−1 AB0 (5.3)
where the advection and diffusion matrices are inverted using the LAPACK linear algebra library
[Anderson et al., 1999]. Hence, given an applied field B0 and the velocity field model constructed
from measurements of the turbulent flow described in Sec. 4.3, the induced magnetic field Bi is
obtained. The code for computing the induced field is described in Spence [2006].
5.2 Measurements of the magnetic field
Measurements from the array of Hall probes described in Sec. 3.7 are used to reconstruct the
magnetic field on the surface of the sphere and the axisymmetric part of the magnetic field within
the sphere. Of particular interest is the magnetic field due to currents induced in the liquid sodium
due to the turbulent flow. However, there are also externally generated magnetic fields such as
the fields generated by the external coils and the background magnetic field. The background
magnetic field is primarily due to the Earth’s magnetic field which passes parallel to the equatorial
plane of the sphere at an angle of about 40 from vertical. Other sources of background field
include ferromagnetic welds in the stainless steel, electric heater rods, motors, etc. The dynamic
background sources are minimized by placing the motors far from the experiment and shutting
off the heating rods while acquiring data. The static background fields are measured before the
experiment is run and subtracted from subsequent measurements.
The magnetic fields generated by the external field coils, represented by B0 in Sec. 5.1, are
measured with the Hall probe array when the sphere is empty. The voltage of the coil power supply
is ramped from its minimum to maximum value and the field measured at each probe location is
recorded. The measurements are then used to create a calibration curve; given the measured current
in the coils, the portion of the measured magnetic field due to the externally applied field can be
subtracted from the measurements so that what is left is the field induced by the flow.
Reconstruction of the magnetic field induced by the flow depends upon the applied magnetic
field being sufficiently weak so as not to change the flow by Lorentz forces. The relative importance

82
of the Lorentz force in the flow dynamics is given by the interaction parameter
N =|J×B|
|(ρv ·∇)v| =σa |B0|2
ρv0
. (5.4)
For flow speeds of v0 = 5 m/s with an applied field strength of 5 mT, the interaction parameter is
N = 3%, hence Lorentz forces are considered negligible.
Time series measurements of the magnetic field when the experiment is running are shown in
Fig. 5.1. The magnetic field from six Hall probes on the surface of the sphere along the same
meridian (same value of φ at six different values of θ) are shown. A nearly-uniform magnetic field
B0 is generated by the coaxial external field coils as seen on the probe time series measurements
for times t < 7 s. At about t = 7 s, the motors are started and by t = 11 s the impeller rotation
rate reaches steady-state. The impeller rotation rates of the two motors shown in Fig. 5.1 are
scaled in terms of the magnetic Reynolds number based on tip speed. Once the flow is established,
the measured magnetic field shifts to a new mean value due to the addition of the mean induced
magnetic field Bi.
The measured Hall probe signals also demonstrate large, broad-band fluctuations in the mag-
netic field due to turbulent eddies in the flow. Fluctuations on the probes near the equator of the
sphere, specifically at θ = 1.39 rad and θ = 1.76 rad, are particularly strong with large intermit-
tent bursts. The significance of these bursts is addressed in Chap. 6. The bursts result in skewed,
non-Gaussian histograms of the measured signals making the most probable measured value dif-
ferent from the mean measured value. To address this peculiarity in the modeling of the magnetic
field, the most probable value of each probe measurement is calculated by finding the value of the
magnetic field at the peak of a histogram of the measurements.
The magnetic field within the flow is measured by the internal Hall probe array. Measurements
from experimental runs with a 6 mT axial applied magnetic field for three different impeller rota-
tion rates are shown in Fig. 5.2. A toroidal magnetic field is induced from the toroidal flow through
the (tαSβTγ) interaction term in Eq. 2.13. The production of a toroidal magnetic field from the
interaction of a poloidal field with a toroidal flow is also known as the Ω-effect and is due to differ-
ential rotation of the fluid [Moffatt, 1978, Sec.s 3.7, 3.11]. Although the strength of the maximum
induced toroidal field BT from an axial applied field B0 is estimated in Moffatt [1978] to scale as

83
0 10 20 30Time [s]
-60
-40
-20
0
20
40
60
Fie
ld [G
]
θ = 0.65
θ = 1.02
θ = 1.39
θ = 1.76
θ = 2.12
θ = 2.49
050
100
150
Rm
tip
Motor 1Motor 2
Figure 5.1 Top: The impeller rotation rate scaled to Rmtip according to Eq. 3.1. The impellerrotation rate increases linearly over about 4 s and achieves steady-state. Bottom: Measurements ofthe magnetic field. The measurement are from Hall probes at six positions in θ with φ = 0.262. A6 mT axial magnetic field is applied.

84
0.40 0.45 0.50 0.55 0.60 0.65-80-60
-40
-20
020
Tor
oida
l Fie
ld [G
]
Rm = 10Rm = 50Rm = 120
0.25 0.30 0.35 0.40 0.45 0.50Radius [m]
0
20
40
60
Axi
al F
ield
[G]
(a)
(b)
Figure 5.2 (a) Toroidal magnetic field measurements near the toroidal maximum above the im-peller (θ = 0.649) and (b) Axial magnetic field measurements in the equatorial plane (θ = 1.57)for impeller rotation rates corresponding to Rmtip = 10, 50, and 120. Note that the radius of thesphere is a = 0.533 m.

85
max |BT | ∼ Rm |B0|, it is observed from Fig. 5.2(a) that the maximum measured toroidal field is
equal in strength to the applied field at Rmtip = 120. From Fig. 5.2(b) it is apparent that the axial
magnetic field along the equatorial plane weakens with greater impeller rotation rate in the region
in which the field is being measured. This weakening of the axial magnetic field implies that the
flow is redirecting the axial magnetic flux to another region. Comparable measurements have been
made in turbulent von Karman flows of liquid gallium [Bourgoin et al., 2004b] and liquid sodium
[Bourgoin et al., 2002].
5.3 Reconstruction of the mean magnetic field
Measurements of the applied magnetic field are used to create a model from which, given
the measured current in the coils, the applied magnetic field at any point in the sphere may be
reconstructed. Since the radial component of the magnetic field is determined from measurements
over the surface of the sphere, the field within the sphere can be determined by matching the
measured field to a vacuum field. Inside the empty sphere there are no currents so ∇×B0 = 0 for
r ≤ a, where a is the radius of the sphere. Hence, the magnetic field may be expressed in terms
of the magnetic potential in Eq. 2.23. For the applied field to be finite at r = 0 we must require
that D`,m = 0. Thus, the applied magnetic field can be written in terms of the spherical harmonic
expansion
B0(r, θ, φ) · r = −∑
`,m
C`,m`r`−1Y m` (θ, φ) (5.5)
B0(r, θ, φ) · θ = −∑
`,m
C`,mr`−1∂Y m`
∂θ(5.6)
B0(r, θ, φ) · φ = −∑
`,m
C`,mr`−1
sin θ
∂Y m`
∂φ. (5.7)
Matching Eqs. 5.5–5.7 at r = 1, the surface of the sphere, to the Bullard and Gellman form in
Eq.s 2.8–2.10 yields the relation
C`,m = − (` + 1) S`,m(1). (5.8)

86
Equations 5.5–5.7 serve as the model for reconstructing the applied magnetic field. Once the
spherical harmonic expansion coefficients C`,m are determined, the magnetic field at any point in
the sphere can be calculated. The coefficients are determined from the applied field calibration
measurements described above. The most probable value of the magnetic field measured on each
probe is stored in an array whose ith component is Bi = [B0(ri, θi, φi) · ni] where ni is the unit
direction vector of the probe orientation. The problem of solving for the coefficients C`,m can be
expressed as the matrix equation
B = L · C (5.9)
where C represents the array of undetermined coefficients C`,m and L is the design matrix with
elements constructed from the remainder of the right-hand-side of Eqs. 5.5–5.7. For example, for
Hall probes facing the radial direction so that ni = r, the matrix elements have the form
Li,j = −`jr`j−1i Y
mj
`j(θi, φi) (5.10)
and the matrix multiplication sums over the harmonic indices `j and mj . The spherical harmonic
expansions are truncated to only the harmonic modes that can be resolved by the Hall probe array,
specifically `max = 7 and mmax = 5. The coefficients are found by calculating C = L−1 · B using
Singular Value Decomposition (SVD) [Press et al., 2002, Sec. 2.6].
The magnetic field induced by the flow Bi can also be reconstructed in a similar manner. The
field induced by the flow is determined from the Hall probe measurements by subtracting the
background and applied magnetic fields. Since the field is created by currents within the flowing
liquid sodium, there are no currents associated with Bi outside the sphere so that ∇×Bi = 0 for
r > a. Again, Eq. 2.23 is invoked to describe Bi in terms of a magnetic potential. This time, for
Bi to remain finite as r → ∞ requires C`,m = 0. The components of the magnetic field in this
case were given in Eqs. 2.24–2.26. Matching Eqs. 2.24–2.26 at r = 1 to the Bullard and Gellman
form in Eqs. 2.8–2.10 yields the relation
D`,m = `S`,m(1). (5.11)

87
The expansion coefficients D`,m are then determined by constructing a matrix equation from
Eqs. 2.24–2.26 using data from the Hall probe measurements and using SVD to invert the design
matrix.
The technique describe above is used to reconstruct the magnetic field induced by a turbulent
flow of liquid sodium when an axial magnetic field is applied [Nornberg et al., 2006b]. The data
depicted in Fig. 5.1 are used to compute the spherical harmonic expansion coefficients of the
induced magnetic field. Time series of the resulting harmonic modes are shown in Fig. 5.3. The
presence of the S1,0 dipole moment in the induced field is of particular importance in that it cannot
be induced by an axisymmetric flow [Spence et al., 2006]. It is an indication that turbulence in the
flow is capable of the symmetry-breaking required for a turbulent dynamo.
The magnetic field within the flow is reconstructed from measurements made by the internal
Hall probe array. Since the Hall probes are single-axis probes, they have to be rotated between
experimental runs to obtain both Bθ and Bφ to fully reconstruct both the poloidal and toroidal
magnetic field within the sphere. The measurements are then used to obtain S`,m using the axi-
symmetric form of Eqs. 2.9 and 2.10 and a curve-fitting routine similar to the one used in the
velocity reconstruction in Sec. 4.3. The reconstruction of both the internal and external magnetic
field induced by the turbulent flow for an axial applied field is shown in Fig. 5.4. The data are
taken from two different experimental runs with the impellers rotating at 1000 rpm. The measured
fields are scaled to the on-axis applied field strength of the nearly-uniform axial field.
5.4 Magnetic field amplification and feedback
As described in Sec. 2.5, a magnetohydrodynamic dynamo requires a mechanism for amplify-
ing the magnetic field and for creating feedback to regenerate the initial seed magnetic field. The
amplification and feedback is accomplished through the advection of the magnetic field by the flow
of conducting fluid. Using a vector identity and the fact that both v and B are solenoidal fields,

88
0 10 20 30Time [s]
-40
-20
0
20
40
Fie
ld [G
]
(3,0)(4,0)(5,0)
(1,0)(2,0)
Applied
Figure 5.3 Spherical harmonic modes of the magnetic field induced by the turbulent t2s2 flow ofliquid sodium when an axial magnetic field is applied (cf. Fig. 5.1).

89
-1.5 -0.8 0.0 0.8 1.5B/B
app
Bpol
Bφ
Figure 5.4 A reconstruction of the axisymmetric mean magnetic field induced by the turbulent flowwhen an axial field is applied. The data are from experimental runs with the impellers rotating at1000 rpm (16.7 Hz) corresponding to Rmtip = 100. The upper half of the sphere shows thepoloidal field lines with color contours indicating the strength of the poloidal field scaled to theapplied field. The lower half of the sphere depicts color contours of the toroidal field strengthscaled to the applied field.

90
Eq. 2.1 can be written1 as
dB
dt=
∂B
∂t+ (v ·∇)B = (B ·∇)v +
1
µ0σ∇2B (5.12)
where d/dt = ∂/∂t + v ·∇ is known as the convective derivative and notationally represents the
use of Lagrangian coordinates which follow material elements in the fluid [see Moffatt, 1978, Sec.
2.5]. The (B ·∇)v term describes the stretching of magnetic field lines by velocity shear whereas
the (v ·∇)B term describes the advection of the magnetic field by the flow. The stretching of
magnetic field lines is associated with amplification of the field since the rate of change of the
magnetic energy is given by [Moffatt, 1978, Sec. 6.2]
dEM
dt=
1
2µ0
d
dt
∫B2 dr =
1
µ0
∫B · dB
dtdr
=1
µ0
∫B · (B ·∇)v dr +
1
µ20σ
∫B · ∇2B dr
=1
µ0
∫B · (B ·∇)v dr− 1
σ
∫J2 dr.
(5.13)
From Eq. 5.13 it is apparent that field line stretching contributes to an increase in magnetic energy
whereas magnetic diffusion leads to a decrease in magnetic energy. Hence, the rate of magnetic
field amplification due to field line stretching must be larger than the rate of ohmic dissipation to
sustain a magnetic field. The rate of ohmic diffusion is estimated to be
τ−1diff =
1
µ0σ
|∇2B||B| ∼ 1
µ0σa2(5.14)
while the rate of advection, including both the line stretching and bending terms, is estimated to be
τ−1adv =
|∇× (v ×B)||B| ∼ v0
a. (5.15)
For the rate of advection to be faster than the rate of diffusion, it is required that
τ−1adv
τ−1diff
= µ0σv0a = Rm > 1. (5.16)
Thus, the amplification and feedback mechanisms of the flow are expected to be more effective at
large magnetic Reynolds numbers.1Note that the coordinates are not normalized

91
As described in Sec. 2.4, the magnetic field generated by the t2s2 is anticipated to be a dipole
field oriented perpendicular to the symmetry axis of the flow. The growth rate of the transverse
dipole field is calculated using the eigenvalue solver described in Sec. 2.3 supplied with the velocity
field model from Sec. 4.3. The results are shown in Fig. 5.5(a). As Rm increases, the growth rate
increases until it becomes positive at a value of Rmcrit = 175. Flows for which Rm < Rmcrit do
not self-generate a magnetic field but can be studied by supplying the transverse dipole field by the
external field coils shown in Fig. 1.1. Using the code described in Sec. 5.1 with B0 specified as
the magnetic field generated by the external transverse field coils, the induced magnetic field due
to the velocity field is computed. The effective magnetic field amplification and feedback due to
the flow can be quantified by the gain g defined as
g =Bi cos δ + B0
B0
. (5.17)
Here, Bi is the magnitude of the induced transverse dipole field (specifically the S1,1 harmonic
component of the field), B0 is the magnitude of the applied transverse dipole field, and δ is the
angle defining the relative orientation of the induced field to the applied field. A gain of unity
indicates that the induced field in the direction of the applied field is weak, a gain of less than
unity indicates that the induced field is opposing the applied field, and a gain of greater than unity
indicates that the applied magnetic field is being effectively amplified and regenerated by the flow.
The calculated gain for the velocity field model is shown in Fig. 5.5(b). As Rm increases, the gain
increases by about 40% before the magnetic field self-excites.
The results of the experiment are shown in Fig. 5.6. The induced magnetic field is reconstructed
from the Hall probe measurements and the S1,1 harmonic component is used in the gain calculation.
The gain is shown to increase with Rmtip in Fig. 5.6(a), though not as quickly as anticipated from
the kinematic model. Figure 5.6(b) shows that the induced field is somewhat out of phase with the
applied field at low Rmtip and that the alignment improves as Rmtip increases. The reduction in
gain is consistent with the enhanced resistivity due to turbulence from Sec. 4.8 (also see Bayliss
et al. [2006] for results from the numerical simulation).

92
-10-8
-6
-4
-2
02
Rea
l Gro
wth
Rat
e
(a)
0 50 100 150 200Rm
0.8
1.0
1.2
1.4
Gai
n
(b)
Figure 5.5 (a) The kinematic growth rate of the dominant eigenmode versus Rm. The growth rateis calculated from the linearized induction equation using the flow profile constructed from LDVmeasurements in a water model of the sodium experiment, where Rmtip = 100. It is assumedthat the impellers generate the same flow profile as the impeller tip speed is increased and that themaximum flow speed scales linearly with the tip speed. (b) The corresponding gain as definedin Eq. 5.17. The amplification of magnetic flux grows as the flow reaches Rmcrit = 175. AboveRmcrit, the gain is undefined since the kinematic model does not account for the saturation of themagnetic field.

93
0.951.001.051.101.151.201.25
Gai
n
(a)
0 20 40 60 80 100 120 140Rmtip
-100-50
0
50
100150
Pha
se D
iffer
ence
[o ]
(b)
Figure 5.6 (a) Amplification of a magnetic field applied perpendicular to the drive shaft axis as afunction of Rmtip. Gain is defined in Eq. 5.17. The solid line is the gain predicted by the kinematicmodel shown in Fig. 5.5(b). (b) Azimuthal angle between the induced transverse dipole field andthe applied field. Error bars on both plots indicate rms fluctuation levels.

94
5.5 The magnetic spectrum due to turbulence
In the case of turbulent flows with large Rm, an applied field can be amplified not only by the
large scale mean flow, but also by turbulent eddies. Whereas the dissipation scale in the kinetic
energy spectrum was governed by viscosity, the magnetic dissipation scale is governed by the
fluid’s conductivity σ. If the applied field is sufficiently small, then the back reaction on the flow
due to the Lorentz force may be neglected. Given these assumptions, the kinetic energy spectrum
is expected to be unchanged from the Kolmogorov spectrum in Eq. 4.10. For Rm À 1, the
small-scale magnetic fluctuations are isotropic and achieve equilibrium. The statistics of these
fluctuations therefore depend solely on ε, σ, and ν.
In fluids and plasmas relevant to planetary and solar dynamos, the ratio of the viscous diffusiv-
ity to the magnetic diffusivity, known as the Prandtl number Pr = µ0σν, is very small. For liquid
sodium at 98 C at standard pressure, Pr = 9 × 10−4. In this case, the scale `σ at which resistive
dissipation becomes important is expected to be much larger than `ν given in Eq. 4.9 [Moffatt,
1961]. In this case, the wave number associated with the resistive diffusion scale kσ = 2π`−1σ
resides in the inertial range of the velocity energy spectrum; hence, it is independent of ν. Dimen-
sional analysis yields
`σ = (µ0σ)−3/4 ε−1/4 ∼ Rm−3/4L. (5.18)
The magnetic dissipation scale therefore divides the inertial range into two subranges: the inertial-
advective range k0 < k < kσ where magnetic field fluctuations are advected by the flow, and the
inertial-resistive range kσ < k < kν in which fluctuations are damped due to resistive diffusion.
For turbulent flows in the experiment with vrms = 3 m/s, the magnetic Reynolds number based on
fluctuation levels is Rmturb = µ0σavrms = 20 and the resistive dissipation scale is estimated to be
about `σ = Rm3/4a = 5 cm.
The scaling properties of the magnetic energy spectrum in the inertial-resistive range have
been studied for turbulent flows with a weak externally applied uniform magnetic field. Moffatt
[1961] and Golitsyn [1960] provide rather rigorous derivations which are consistent with the fol-
lowing scaling model. The magnetic field is broken up into mean and fluctuating components as in

95
Sec. 2.7.2. Equation 2.43 is dotted with B and the order of magnitude of each term is determined
following Ruzmaikin and Shukurov [1982] and [Moffatt, 1978, Sec.7.5] giving
∣∣∣∣∣∂B2
∂t
∣∣∣∣∣ ∼
⟨B2
⟩
τ`
(5.19)
∣∣∣B ·∇×(v0 × B
)∣∣∣ ∼v0
⟨B2
⟩
`∼
⟨B2
⟩
τ0
(5.20)
∣∣∣B ·∇× (v ×B0)∣∣∣ ∼
B0
⟨B2
⟩1/2
〈v2〉1/2
`=
B0
⟨B2
⟩1/2
τ`
(5.21)
∣∣∣B ·∇×G∣∣∣ ∼
〈v2〉1/2⟨B2
⟩
`=
⟨B2
⟩
τ`
(5.22)
∣∣∣∣1
µ0σ∇2B2
∣∣∣∣ ∼
⟨B2
⟩
µ0σ`2=
⟨B2
⟩
τσ
(5.23)
where ` is the eddy scale size, τ` = `/ 〈v2〉1/2 is the eddy turn-over time, τ0 = `/v0 is the advection
time, and τσ = µ0σ`2 is the diffusion time. Note that the ∇×(v0 × B
)term is just the advection
of magnetic fluctuations with the fluid. Equating this term with ∂B/∂t is equivalent to assuming
the Taylor hypothesis and deriving the dispersion relation ω = v0k. Also note that τσ/τ0 =
µ0σv0` = Rm a/` so that for high magnetic Reynolds number and very small scales compared
with the radius of the sphere, the resistive diffusion time is much longer than the advection time.
The ∇ × (v ×B0) term is referred to as the field shredding term since it represents gradients in
the turbulent velocity field inducing magnetic fields on the eddy scale length `. For τ` ¿ τσ, the
field shredding term is balanced with the diffusion term. Taking the Fourier transform yields Bk ∼kvkτσB0, hence the magnetic spectrum in the inertial-resistive range is EM(k) ∼ k−1Bk ∼ k−11/3.
The k−11/3 scaling of the magnetic spectrum in the inertial-resistive range for a uniform applied
field has been observed in the Von Karman Sodium (VKS) Experiment [Bourgoin et al., 2002]
and the Von Karman Gallium (VKG) Experiment [Odier et al., 1998]. It was also observed in
liquid sodium pipe flow in the Superphenix breeder reactor [Alemany et al., 2000] and the Riga
experiment [Gailitis et al., 2004]. A steeper spectrum was reported by the group Maryland with
a smaller impeller-driven experiment attributed to shielding effects of the stainless steel vessel

96
Figure 5.7 The velocity wavenumber spectrum, labeled MHD (V), and the magnetic wavenumberspectrum, labeled MHD (B), from a numerical simulation of the experiment [Fig. 13 in Baylisset al., 2006]. The wavenumber spectrum from a comparable hydrodynamic simulation is shownin green. The wavenumber spectrum is computed from the frequency spectrum using the Taylorhypothesis. The measurement position within the simulated flow is in the equatorial plane atr = 0.75 a, θ = 2π. The simulated flow is subcritical with a 5.13 mT uniform applied field. Thered line indicates a k−5/3 slope whereas the blue line indicates a k−5/3 slope above the resistivecutoff and a k−11/3 slope below.

97
[Peffley et al., 2000]. Karlsruhe reported a steeper scaling due to modifications of the small scale
turbulence by Lorentz forces [Muller et al., 2004]. The scaling has also been verified in simulations
based on EDQNM closure [Leorat et al., 1981] and direct numerical simulations of the Madison
Dynamo Experiment shown in Fig. 5.7 [Bayliss et al., 2006; Bayliss, 2006].
However, there are varying results for magnetic spectra in the inertial-advective range. Batch-
elor [1950] pointed out that the evolution of the magnetic field in a turbulent fluid is analogous
to the evolution of vorticity in hydrodynamic turbulence since the induction and vorticity equa-
tions have the same form. He argued that magnetic field amplification depended on the magnetic
Prandtl number; for Pr > 1, the magnetic field would be amplified and become comparable to
the kinetic energy at wavenumbers larger than the inertial range, i.e. the magnetic spectrum would
reach equipartition for k > kν . For Pr < 1, however, Batchelor thought that resistive dissipation
of the magnetic field would damp out any amplification of the field due to turbulent stretching of
field lines. For a weak applied field, Moffatt [1961] showed that turbulence in the inertial-advective
range (k < kσ < kν) would amplify the magnetic field such that EM(k) ∝ k1/3 for Pr < 1 using
the vorticity analogy. Kraichnan and Nagarajan [1967] identified a problem with the use of the
vorticity analogy, namely that the conservation of vorticity implied that the magnetic field at high
wavenumbers could be sustained against resistive dissipation at the cost of magnetic energy at low
wavenumbers. Provided that the low wavenumber magnetic field is supplied externally this poses
no problem in the experiment, but suggests that the magnetic spectrum is produced only by advec-
tion of the applied field and not by turbulent amplification. If this is the case, then for τ À τ0, τσ,
the field shredding term is balanced with the ∇×G term so that Bk ∼ B0. As described in Bour-
goin et al. [2002], the magnetic field increments saturate for long time scales corresponding to
low wavenumber. In this case, the magnetic spectrum is EM(k) ∼ k−1B20 . The k−1 scaling at
low wavenumbers was observed in VKS [Bourgoin et al., 2002], Riga [Gailitis et al., 2004], and
Karlsrhue [Muller et al., 2004].
Provided that the resistive dissipation scale kσ is sufficiently separated from the scale of the
mean flow k0, another power law scaling may develop. In this case, the relevant time scale is
τ ∼ τ0. Equation 2.43 can be linearized by neglecting the ∇ × G and the field shredding term

98
giving∂B
∂t= (v0 ·∇) B +
1
µ0σ∇2B. (5.24)
The(B ·∇
)v0 term is neglected since the mean flow is considered smooth on the length scales
` ¿ `0. Equation 5.24 is remarkably similar to the advection-diffusion equation for a passive scalar
and the magnitude of the vector magnetic field B can be considered analogous to a contaminant
in the turbulent flow [Bershadskii and Sreenivasan, 2004]. The magnitude of the magnetic field
assumes the k−5/3 scaling just as the spectrum of a passive scalar does [Muller and Biskamp,
2000; Brandenburg, 2001]. The k−5/3 scaling has been observed in the Maryland experiment
[Peffley et al., 2000] and in the solar wind [Goldstein et al., 1995; Goldstein and Roberts, 1999].
Simulations of the experiment by Bayliss et al. [2006] suggest that there are scales at which the
magnetic field behaves as a passive vector as seen in Fig. 5.7.
5.6 Measurements of the magnetic spectrum
The magnetic energy spectrum is determined from measurements from single-axis Hall probes
placed within stainless steel tubes immersed in the turbulent flow. The Hall probe measurements
are regularly spaced in time with sampling rates of 1024 Hz. The frequency power spectral density
(PSD) is found by using the fast Fourier transform algorithm in IDL. The magnetic field measure-
ments are scaled in terms of the Alfven speed vA = B/√
µ0ρ for comparison with the velocity
spectrum. The magnetic field time series measurements are divided into blocks of time, the power
spectrum is determined for each block of the signal, and then the blocks are averaged together to
lower the variance in the resulting spectrum.
Examples of the measured velocity and magnetic spectra at four different locations in the flow
are shown in Fig. 5.8. The velocity data are from LDV measurements described in Chap. 4 for a
flow with an impeller rotation rate of 16.7 Hz. As such, the two components of the velocity field
are measured simultaneously. Since the Hall probes used to measure the magnetic field are single-
axis probes, the two components of the magnetic field are taken from two different experimental
runs with an axial applied field. The data for Bφ at the two different locations in Figs. 5.8(a)

99
10−810−6
10−4
10−2
100
102 vθvφ
Bθ
Bφ
vθvφ
Bθ
Bφ
10−1 100 101 102 10310−810−6
10−4
10−2
100
102 vθvφ
BrBθBφ
10−1 100 101 102 103
vθvφ
BθBφ
PS
D [m
/s/H
z]P
SD
[m/s
/Hz]
Frequency [Hz] Frequency [Hz]
(a) (b)
(c) (d)
Figure 5.8 The measured velocity and magnetic field spectra for various locations within the flow.The measurements are from comparable experimental runs in the water and sodium label with animpeller rotation rate of 16.7 Hz. (a) Measurements are taken at a location slightly behind andabove one of the impellers (vθ, vφ measured at r = 0.448 m, θ = 0.596 rad and Bθ, Bφ measuredat r = 0.453 m, θ = 0.649 rad). (b) Measurements in the shear layer at the equator of the sphere(vθ, vφ measured at r = 0.320 m, θ = 1.50 rad and Bθ, Bφ measured at r = 0.301 m, θ = 1.57 rad).(c) Measurements near the inner sphere wall (vθ, vφ measured at r = 0.528 m, θ = 2.41 rad, Bθ, Bφ
measured at r = 0.532 m, θ = 2.49 rad, Br measured on the surface of the sphere at r = 0.556,θ = 2.49 rad). (d) Measurements near the impeller (vθ, vφ measured at r = 0.303 m, θ = 1.05 radand Bθ, Bφ measured at r = 0.306 m, θ = 1.02 rad).

100
and 5.8(b) are taken for an experimental run with an applied field strength of 7.4 mT and a sodium
temperature of 120 C. The data for Bθ are taken for an experimental run with an applied field
strength of 6.9 mT and a sodium temperature of 108 C.
There are several remarkable features of the magnetic spectra in Fig. 5.8. First, the magnetic
spectra are at least two orders of magnitude below the velocity spectra; there is no equipartition
of kinetic and magnetic energy as would be for Alfvenic turbulence from a small-scale dynamo.
Second, the magnetic spectra are decreasing for increasing frequency with no indication of field
amplification at small scales. Third, despite slight variations in sodium temperature and applied
field strength, the spectra are identical for different components of the respective fields. Hence,
at sufficiently small scales there is a realization of isotropy in the turbulence for both the velocity
field and the magnetic field. Finally, the shape of the spectra vary from position to position. For
example, the spectrum in Fig. 5.8(c) for a position near the sphere wall close to the symmetry
axis has a shallow f−1 slope extending to about 20 Hz before the f−11/3 range, very similar to the
observation in Bourgoin et al. [2002]. The other spectra, however, have a steeper fall off with an
intermediate f−5/3 range suggesting that the magnetic field is being passively advected.
The three ranges are labeled in Fig. 5.9. The frequency at which the f−1 range ends moves to
lower frequencies as the strength of the applied magnetic field is increased. This observation sug-
gests that the saturation of the magnetic increments discussed in Bourgoin et al. [2002] giving rise
to the f−1 range becomes less effective at high frequencies when the magnetic field is sufficiently
strong.
The frequency spectrum is converted to a wave number spectrum in Fig. 5.10 by specifying the
dispersion relation ω = kV0 according to Taylor’s hypothesis. The mean flow speed V0 at the probe
location is determined from the flow model established by measurements on the water experiment.
The dissipation scale kσ is evident from the knee in the wave number spectrum of Fig. 5.10 and
increases with Rmtip. Consequently, the magnetic field gains structure at smaller scales as Rmtip
increases, down to length scales of `σ = 2π/kσ = 16 cm at Rmtip = 100.

101
0.1 1.0 10.0 100.0 1000.0Fequency [Hz]
10-8
10-6
10-4
10-2
100
102
Pow
er D
ensi
ty S
pect
rum
[(m
/s)/
Hz]
75 Gauss
50 Gauss
25 Gauss
0 Gauss
f-1 f-5/3
f-11/3
f-5/3
fm fσ
Figure 5.9 The measured magnetic spectrum for Bφ at r = 0.453 m, θ = 2.49 rad for variousapplied field strengths. The velocity spectrum (blue) is shown for reference. B0 = 0 correspondsto a case in which only the Earth’s magnetic field was present. The cutoff frequency between thef−1 and f−5/3 ranges fm is found to decrease as B0 increases. The resistive dissipation cutoff islabeled fσ.

102
10-1 100 101 102 103
k [m-1]
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
Pow
er S
pect
rum
[Gau
ss2 ] k-5/3
k-11/3
Rm=100Rm=60Rm=30
kσk0
Figure 5.10 The inferred spatial spectrum constructed from the Fourier transform of the signalfrom a Hall probe inside the sphere for three different values impeller rotation rates. The probe islocated just above the impeller near the toroidal maximum in r = 0.4531 m, θ = 2.49 rad. Thewavenumber corresponding to the scale size of the experiment is labeled as k0. The wavenumbercorresponding to the dissipation scale kσ is labeled for the three spectra and is found to increasewith Rm.

103
5.7 Influence of the back reaction on turbulence
The arguments above address the problem of magnetic field generation in MHD turbulence
from the kinematic point of view, i.e. the back-reaction due to the Lorentz force is considered to be
weak compared with the inertial forces in Eq. 2.2. In Sec. 5.2, Lorentz forces were determined to
be too weak to affect the mean flow. It has not been demonstrated, however, that turbulent eddies
at scales smaller than the mean flow are unaffected the applied magnetic field. The dominant
contribution to the Lorentz force at small scales is due to currents induced by the small scale
eddies of size ` = 2πk−1 interacting with the large scale field of strength B0 [Leorat et al., 1981].
From Ohm’s Law, the small scale current is Jk ∼ σvkB0. The relative strength of the Lorentz force
compared to inertial forces at wavenumber k is
|J×B||(ρv ·∇)v| ∼
σvkB20
ρkv2k
=
(σB2
0
ρCε1/3
)k−2/3, (5.25)
where vk = Cε1/3k1/3 [Frisch, 1995]. Hence, the interaction parameter falls off at higher wave-
number and is strongest at the large scales. The strength of the magnetic field necessary for the
Lorentz force and inertial forces to be of the same order is
B0 =
√ρCε1/3(2π/a)2/3
σ= 40 mT (5.26)
given the values in Tabs. 3.1 and 4.1. The maximum applied field strength of the external coils is
15 mT, thus back reaction effects on the turbulence are currently unobservable. Stronger applied
fields will be necessary in addition to liquid metal velocimetry to characterize the influence of the
applied field on the turbulence.

104
Chapter 6
Observation of an intermittently excited magnetic field
The primary observation to be reported from the Madison Dynamo Experiment suggesting
the presence of a homogeneous dynamo is the observation of an intermittently excited magnetic
field [Nornberg et al., 2006a]. Recall from Sec. 2.7.1 that the transition from damped to growing
magnetic fields is expected to be characterized by intermittent excitations of the transverse dipole
field. There are several possible mechanisms for this excitation. Velocity field fluctuations are
large, with V / 〈V 〉 ≈ 0.5 as determined from LDV measurements. These large fluctuations cause
the peak flow speed to vary, which can be interpreted as variation in Rm. Fluctuations at the largest
scales can also cause changes in the shape of the flow leading to variation of Rmcrit. The statistics
of the small-scale fluctuations could change, also contributing to variation of Rm and Rmcrit. For
instance, if the kinetic helicity of the small-scale eddies becomes sufficiently strong for an instant
in time, the net current generation could give rise to the observed magnetic field bursts [Cattaneo
and Tobias, 2005; Leprovost and Dubrulle, 2005]. Regardless of scale, subtle changes in the flow
can adjust the instability threshold.
As mentioned in Sec. 5.2, when an axial magnetic field is applied to the turbulent flow there are
intermittent bursts observed on Hall probes near the equator of the sphere. Figure 6.1 shows signals
from two Hall probes on the surface of the sphere and their probability distribution functions. The
signal shown in Fig. 6.1(a) is from a probe located on the surface of the sphere near the equator
for an impeller rotation rate of 16.7 Hz with an axial applied field of 6 mT. The inset in the figure
shows a segment of time with a particularly strong burst with a duration of a few seconds. The burst
is sufficiently strong that the measured field is in the opposite direction from the most probable
measured field. Figure 6.1(b) shows the PDF of the signal. The tail of the PDF near negative field

105
values is significantly larger than what would be expected for a Gaussian distribution (depicted
by the dashed curve). For comparison, the signal from a Hall probe near one of the drive shafts
is plotted in Fig. 6.1(c) along with the corresponding PDF in Fig. 6.1(d). The distribution of the
fluctuations measured on this probe is adequately fit by a Gaussian distribution as expected from
normal noise.
The structure of the magnetic field during these bursts has been studied using the array of Hall
probes on the surface of the sphere and the techniques for reconstructing the measured magnetic
field presented in Sec. 5.3. The induced field on the surface of the sphere during a burst is shown
in Fig. 6.2. The harmonic composition of the induced field is primarily due to the S1,1 coefficient
corresponding to a dipole field perpendicular to the rotation axis of the experiment. The orientation
of this transverse dipole field varies from burst to burst so that on average the non-axisymmetric
part of the induced field is small compared with the axisymmetric part.
From the kinematic eigenvalue calculations presented in Sec. 2.4, the largest growing eigen-
mode of the t2s2 flow also has a spherical harmonic structure dominated by the S1,1. The fully
dynamic simulation of Bayliss et al. [2006] shows this same transverse dipole field as the expected
structure of the excited field for a laminar flow (see Fig. 2.4). The observed bursts are suggestive
of an intermittent excitation of the dominant eigenmode of the t2s2 flow. A time series of the
energy in the transverse dipole field (the S1,1 component in the spherical harmonic expansion) is
shown in Fig. 6.3. The formula for calculating the mode energy for a particular spherical harmonic
expansion coefficient is derived in Appendix A.
To characterize the behavior of the bursts, a conditional averaging procedure was devised. First,
the peaks of the bursts are identified using a peak detection algorithm. A threshold is chosen to
distinguish a burst from the small background fluctuations; for this analysis, the threshold is 50%
of the maximum measured energy. This level is chosen since it is sufficiently small to capture a
large number of bursts and provide adequate averaging, yet is significantly larger than the mean
measured energy. For each of the data sets used in the analysis, the threshold is about two standard
deviations above the mean energy of the time series. Each time the energy crosses the threshold,
the local maximum is found and identified as the time of a burst. Bursts which are the result of

106
0 200 400 600Time [s]
-20
-10
0
10
20
30
Mag
netic
Fie
ld [G
]
42 44 46 48 50 52 54Time [s]
-20-10
010203040
Mag
netic
Fie
ld [G
]
Equator
(a) -10 0 10 20 30 40Magnetic Field [G]
10-4
10-3
10-2
10-1
PD
F
(b)
0 200 400 600Time [s]
29
30
31
32
33
Mag
netic
Fie
ld [G
]
Pole
(c) 28 29 30 31 32 33 34Magnetic Field [G]
10-2
10-1
100
PD
F
(d)
Figure 6.1 (a) Measurement from a Hall probe on the surface of the sphere near the equator atr = 0.556 m, θ = 1.39 rad. (b) The probability distribution for the signal in (a). The impellerrotation rate for this example is 16.7 Hz (Rmtip = 100) and a 6 mT dipole field is applied. AGaussian fit to the right side of the distribution is shown (dotted line) to illustrate the asymmetry.(c) The time series from a probe near the drive shaft axis at r = 0.899 m, θ = 0.175 rad and (d) itsprobability distribution is shown for comparison.

107
Figure 6.2 Contours of Br(θ, φ) measured on the surface of the sphere during a burst. The modestructure of the intermittent bursts corresponds to a dipole field aligned perpendicular to the driveshaft axis, as seen from the surface magnetic field (the axis of rotation is vertical and the top of thesphere is at a longitude of 90). The mean magnetic field has been removed to isolate the structureof the fluctuation.

108
0 100 200 3000.00
0.04
0.08
0.12
Time [s]
Ene
rgy
[J]
Figure 6.3 Time series of the energy in the transverse dipole field for an impeller rotation rate of10 Hz. The diamonds mark the peak of a burst where the energy exceeds 50% of its maximumvalue.
−4 −2 0 2 40.00
0.05
0.10
0.15
0.20
Ene
rgy
[J]
Time [s]
ftip=13.3 Hzftip=10 Hzftip=6.7 Hz
Figure 6.4 The ensemble average of bursts from three time series. The averaged burst is used tocalculate the growth rate and burst width in Tab. 6.1.

109
ftip [Hz] Rm T [s] Nb fb [s−1] nd [%] τb [s] λb [s−1] 〈E〉 [mJ] σE [mJ]
3.3 14 300 5 0.017 6.7 3.99 0.17 2 2
6.7 22 300 9 0.030 7.5 2.50 0.30 9 8
10.0 28 300 22 0.070 6.1 0.83 1.12 21 20
13.3 35 300 38 0.127 7.3 0.58 1.62 48 43
16.7 42 300 37 0.123 6.3 0.51 2.22 78 76
20.0 49 100 15 0.150 5.4 0.36 2.93 111 98
Table 6.1 The magnetic Reynolds number Rm based on the maximum speed in measured flows,duration of the measurement T , number of bursts Nb, average burst rate fb, burst width τb, growthrate λb, estimate of the overall fraction of time the flow is bursting nd, mean energy 〈E〉, andstandard deviation of the energy σE as a function of the rotation rate of the impellers ftip.
rapid fluctuations across the threshold are rejected as are bursts that are too close to the beginning
or end of the measurement period. The peaks of the remaining bursts are identified by diamonds
in Fig. 6.3.
Once the burst times are identified, an ensemble average of the individual measured bursts
is created. A time interval is chosen to create a block of time around each burst. The blocks
are averaged together to create a canonical burst from which the characteristics of the bursts are
determined. Examples of the burst ensemble averages for three different impeller rotation rates
are shown in Fig. 6.4. The width of a burst τb is calculated from the width of the peak at half
maximum. The growth rate λb is determined from an exponential curve fit of the rising edge of the
averaged burst. The results are presented in Table 6.1. The bursts tend to increase in frequency and
strength for higher impeller rotation rates. Although the growth rate of the bursts tends to increase
linearly with impeller rotation rate, the burst widths are decreasing. The proportion of time that
the magnetic field is bursting is estimated to be nd = fbτb, where fb is the average frequency of the
bursts. The data in Tab. 6.1 show that the proportion of time the flow is bursting stays relatively
constant between 5–8%.
It is also interesting to note from Table 6.1 that the standard deviation of the energy in the
intermittent transverse dipole field is approximately equal to its mean value. This equality is a

110
0 1 2 3 4 50.001
0.010
0.100
1.000
E/<E>
PD
F 3.3 Hz6.7 Hz10.0 Hz13.3 Hz16.7 Hz20.0 Hz
Figure 6.5 The PDF of the energy in the transverse dipole field for several impeller rotation rates.The thick line is an example Poisson distribution. The thin line represents the energy distributionif the magnetic fluctuations were Gaussian.

111
characteristic of a Poisson probability distribution [Landau and Lifshitz, 1999] and suggests that
the bursts can be treated as rare, random events. The probability distribution of the magnetic field
energy can be determined heuristically given this assumption. The probability of measuring n
bursts in time t is given by
P (t) =(fbt)
n
n!e−fbt (6.1)
where fb is the average rate of bursts. The average growth of the magnetic field over time t during
a burst is ∆B = B0eλt, where B0 is the average strength of the initial seed field. The resulting
gain in the magnetic field energy per unit volume is
∆E =∆B2
2µ0
=B2
0
2µ0
e2λt. (6.2)
Solving for t in terms of ∆E yields
t =log (∆E/E0)
2λ(6.3)
where E0 = B20/2µ0. Substituting the time in terms of ∆E into the Poisson distribution in Eq. 6.1
yields a log-Poisson distribution for the probability density of ∆E
P (∆E) =1
n!
[fb
2λln
(∆E
E0
)]n
e−(fb/2λ) ln(∆E/E0). (6.4)
The probability distributions of the transverse dipole energy are shown in Fig. 6.5. The distribu-
tions with large numbers of bursts tend to have significantly more high energy fluctuations than
is expected from Gaussian fluctuations. The overall invariance of the distributions as the impeller
rotation rate is increased demonstrates that the increased frequency of bursts is offset by their
shortened duration. Thus, for the flow rates studied the flow fails to achieve sufficient feedback to
sustain the growth of the magnetic field.

112
Chapter 7
Summary and discussion
The Madison Dynamo Experiment, currently the most promising candidate for demonstrating
a homogeneous dynamo in a simply-connected turbulent flow, has been constructed and has been
operated with over a dozen successful experimental run days. The experiment is unique among
other simply-connected liquid sodium experiments in that the magnetic field is resolved by a large
array of probes capable of characterizing the harmonic structure of the magnetic fields induced by
the flow. It is also currently the largest of the unconstrained-flow experiments used to study the
role of turbulence in magnetic field generation.
The flows produced in the Madison Dynamo Experiment are modeled using LDV measure-
ments from a full scale water model of the sodium experiment. The flow model is used to predict
the structure of the magnetic field induced by the flow when an external field is supplied. It is also
used to predict the threshold for magnetic field growth. The magnetic structure of the self-excited
magnetic field is that of a dipole oriented perpendicular to the rotation axis of the flow. The predic-
tions from this laminar model suggest that the mean flow should be stable to the dynamo instability
for the rotation rates studied in the sodium experiment.
The mechanism for providing the amplification and feedback necessary to generate the mag-
netic field is understood to be a process of stretching the magnetic field into loops in each hemi-
sphere of the flow and twisting them by a rotation of π radians. This process is illustrated by a
simulation of field lines being advected by the flow in the frozen-flux approximation.
The amplification of a magnetic field by the flow is determined by measuring the strength of
a field induced by the flow when externally generated magnetic fields are applied. The induced
field strength is found to be weaker than predicted for a laminar flow which is consistent with an

113
enhanced resistivity due to turbulence as found in numerical simulations of the experiment and
estimates from LDV measurements. Measurements of the velocity correlation time suggest that an
instability in the shear layer between the two flow cells is responsible for the enhanced magnetic
diffusivity.
The velocity and magnetic spectra have each been measured in the water and sodium experi-
ments respectively. A direct comparison suggests that the magnetic field energy is 2–3 orders of
magnitude below equipartition with the velocity field energy. The magnetic field is dissipated at
scale lengths on the order of 30% of the radius of the vessel and so the eddies inducing the field
are very close to the scale length of the mean flow. There is no evidence of small scale field am-
plification; rather, the magnitude of the magnetic field behaves as a passive vector advected by the
flow.
The magnetic field induced by the flow when an axial field is applied demonstrates intermittent
excitations. The structure of the excited field matches the field predicted to be self-excited by the
t2s2 flow. Large scale fluctuations make it possible for the flow to occasionally achieve criticality
to produce a magnetic field burst. The characteristics of the bursts are determined from conditional
averaging. They are found to have larger growth rates and become stronger and more frequent with
increasing Rm. They also shorten in duration so that the time of excitation never exceeds about
5–8% of the total time. Since the shortening of the bursts offsets the increased growth rate of the
field excitation, the dynamo is unable to feedback on itself to sustain the growth of the field. If the
burst length finally reaches a minimum value as Rm increases then it is expected that the bursts
will begin to overlap and produce sustained growth. This type of on-off intermittency has been
suggested as a characteristic of the galactic dynamo [Ko and Parker, 1989].
Some potential avenues for further research have been suggested throughout the thesis. De-
termining the effect of the induced magnetic field on the small scale turbulence requires direct
velocimetry measurements of the liquid sodium flow. This can be accomplished with the installa-
tion of an ultrasound Doppler velocimetry system which is currently being prototyped on the water
experiment. Also, saturation effects can be studied by applying stronger magnetic fields with the

114
external coils. Ultimately, to further explore the transition to a dynamo the experiment must be
operated at higher impeller rotation rates where the mean flow is predicted to self-excite.

115
References
Alemany, A., Marty, P., Plunian, F., and Soto, J., “Experimental investigation of dynamo effect in
the secondary pumps of the fast breeder reactor superphenix,” J. Fluid Mech., 403, 263 (2000).
doi:10.1017/S002211209900703X.
Alfven, H., “On the existence of electromagnetic-hydrodynamic waves,” Ark. Mat. Astron. o. Fys.,
29, 1 (1943).
Anderson, E., Bai, Z., Bischof, C., Blackford, S., Demmel, J., Dongarra, J., Du Croz, J., Green-
baum, A., Hammarling, S., McKenney, A., and Sorensen, D., LAPACK Users’ Guide (Society
for Industrial and Applied Mathematics, Philadelphia, PA, 1999), third edition, ISBN 0-89871-
447-8.
Arfken, G. B. and Weber, H. J., Mathematical Methods for Physicists (Academic Press, San Diego,
CA, 1995), fourth edition.
Aumaitre, S., Petrelis, F., and Mallick, K., “Low-frequency noise controls on-off
intermittency of bifurcating systems,” Phys. Rev. Lett., 95 (6), 064101 (2005).
doi:10.1103/PhysRevLett.95.064101.
Bachalo, W. D., “Laser doppler velocimetry primer,” Technical Report NASA-CR-177386, NASA
Center for Aerospace Information (1985). URL.
Backus, G., “The Axisymmetric Self-Exicited Fluid Dynamo.” Astrophys. J., 125, 500 (1957).
URL.
Batchelor, G. K., “On the spontaneous magnetic field in a conducting liquid in turbulent motion,”
Proc. R. Soc. London, Ser. A, 201 (1066), 405 (1950). URL.

116
Batchelor, G. K., The Theory of Hydrodynamic Turbulence (Cambridge University Press, New
York, 1970).
Bayliss, R. A., Numerical simulations of current generation and dynamo excitation in a
mechanically-forced, turbulent flow, Ph.D. thesis, University of Wisconsin-Madison (2006).
Bayliss, R. A., Forest, C. B., Nornberg, M. D., and Terry, P. W., “Numerical simulations of mag-
netic field generation in a mechanically-forced spherical dynamo,” (2006), submitted to Phys.
Rev. E, arXiv:physics/0602126.
Benedict, L. H., Nobach, H., and Tropea, C., “Estimation of turbulent velocity spectra from laser
Doppler data,” Meas. Sci. Technol., 11, 1089 (2000). URL.
Bershadskii, A. and Sreenivasan, K. R., “Intermittency and the passive nature of the magnitude of
the magnetic field,” Phys. Rev. Lett., 93 (6), 064501 (2004). URL.
Bevir, M. K., “Possibility of electromagnetic self-excitation in liquid metal flows in fast reactors,”
J. British Nuc. Eng. Soc, 12, 455 (1973).
Bhattacharjee, A. and Yuan, Y., “Self-Consistency Constraints on the Dynamo Mechanism,” As-
trophys. J., 449, 739 (1995). doi:10.1086/176094. URL.
Blackman, E. G. and Field, G. B., “Resolution of an Ambiguity in Dynamo Theory and Its Con-
sequences for Back-Reaction Studies,” Astrophys. J., 521, 597 (1999). doi:10.1086/307590.
URL.
Boldyrev, S. and Cattaneo, F., “Magnetic-Field Generation in Kolmogorov Turbulence,” Phys. Rev.
Lett., 92 (14), 144501 (2004). URL.
Bourgoin, M., Marie, L., Petrelis, F., Gasquet, C., Guigon, A., Luciani, J.-B., Moulin, M., Namer,
F., Burguete, J., Chiffaudel, A., Daviaud, F., Fauve, S., Odier, P., and Pinton, J.-F., “Magnetohy-
drodynamics measurements in the von Karman sodium experiment,” Phys. Fluids, 14 (9), 3046
(2002). URL.

117
Bourgoin, M., Odier, P., Pinton, J.-F., and Ricard, Y., “An iterative study of time independent
induction effects in magnetohydrodynamics,” Phys. Fluids, 16 (7), 2529 (2004a). URL.
Bourgoin, M., Volk, R., Frick, P., Khripchenko, S., Odier, P., and Pinton, J.-F., “Induction mech-
anisms in von Karman swirling flows of liquid gallium,” Magnetohydrodynamics, 40 (1), 3
(2004b). URL.
Brandenburg, A., “The Inverse Cascade and Nonlinear Alpha-Effect in Simulations of Isotropic
Helical Hydromagnetic Turbulence,” Astrophys. J., 550, 824 (2001). doi:10.1086/319783.
Bullard, E. C. and Gellman, H., “Homogeneous dynamos and terrestrial magnetism,” Philos.
Trans. R. Soc. London, Ser. A, 247 (928), 213 (1954). URL.
Cattaneo, F., Hughes, D. W., and Thelen, J. C., “The nonlinear properties of a large-scale dynamo
driven by helical forcing,” J. Fluid Mech., 456, 219 (2002). doi:10.1017/S0022112001007479.
Cattaneo, F. and Tobias, S. M., “Interaction between dynamos at different scales,” Phys. Fluids,
17 (12), 127105 (2005). URL.
Charbonneau, P., “Dynamo Models of the Solar Cycle,” Living Rev. Solar Phys., 2 (2005), cited on
12 July 2006. URL.
Childress, S. and Gilbert, A., Stretch, Twist, Fold: The fast dynamo (Springer-Verlag Telos, Berlin,
1995).
Chorin, A. J. and Marsden, J. E., A Mathematical Introduction to Fluid Mechanics (Springer-
Verlag, New York, 1993).
Colgate, S. A., “Dynamo and hydromagnetic liquid metal experiments,” Astron. Nachr., 327, 456
(2006). doi:10.1002/asna.200610557.
Cook, J. G. and Fritsch, G., Thermal Conductivity in the Liquid Phase (Blackwell Science Publica-
tions, Oxford, 1985), chapter 7.2, International Union of Pure and Applied Chemistry Chemical
Data Series.

118
Cowling, T. G., “The magnetic field of sunspots,” Mon. Not. R. Astron. Soc., 94, 39 (1933). URL.
Dudley, M. L. and James, R. W., “Time-dependent kinematic dynamos with stationary flows,”
Proc. R. Soc. London, Ser. A, 425 (1869), 407 (1989). URL.
Elsasser, W., “Induction effects in terrestrial magnetism Part I. theory,” Phys. Rev., 69 (3–4), 106
(1946). URL.
Falkovich, G., Kolokolov, I., Lebedev, V., and Migdal, A., “Instantons and intermittency,” Phys.
Rev. E, 54 (5), 4896 (1996). doi:10.1103/PhysRevE.54.4896.
Falkovich, G. and Lebedev, V., “Single-point velocity distribution in turbulence,” Phys. Rev. Lett.,
79 (21), 4159 (1997). doi:10.1103/PhysRevLett.79.4159.
Forest, C. B., Bayliss, R. A., Kendrick, R. D., Nornberg, M. D., O’Connell, R., and Spence,
E. J., “Hydrodynamic and numerical modeling of a spherical homogeneous dynamo experi-
ment,” Magnetohydrodynamics, 38 (1/2), 107 (2002). URL.
Frisch, U., Turbulence: The Legacy of A. N. Kolmogorov (Cambridge University Press, Cambridge,
England, 1995).
Frisch, U., Pouquet, A., Leorat, J., and Mazure, A., “Possibility of an inverse cascade of magnetic
helicity in magnetohydrodynamic turbulence,” J. Fluid Mech., 68, 769 (1975).
Gailitis, A., Lielausis, O., Dement’ev, S., Platacis, E., Cifersons, A., Gerbeth, G., Gundrum,
T., Stefani, F., Christen, M., Hanel, H., and Will, G., “Detection of a flow induced mag-
netic field eigenmode in the Riga dynamo facility,” Phys. Rev. Lett., 84 (19), 4365 (2000).
doi:10.1103/PhysRevLett.84.4365.
Gailitis, A., Lielausis, O., Platacis, E., Dement’ev, S., Cifersons, A., Gerbeth, G., Gundrum, T.,
Stefani, F., Christen, M., and Will, G., “Magnetic field saturation in the Riga dynamo experi-
ment,” Phys. Rev. Lett., 86 (14), 3024 (2001). doi:10.1103/PhysRevLett.86.3024.

119
Gailitis, A., Lielausis, O., Platacis, E., Gerbeth, G., and Stefani, F., “Laboratory experiments on hy-
drodynamic dynamos,” Rev. Mod. Phys., 74 (4), 973 (2002a). doi:10.1103/RevModPhys.74.973.
Gailitis, A., Lielausis, O., Platacis, E., Gerbeth, G., and Stefani, F., “On back-reaction effects in
the Riga dynamo Experiment,” Magnetohydrodynamics, 38 (1/2), 15 (2002b). URL.
Gailitis, A., Lielausis, O., Platacis, E., Gerbeth, G., and Stefani, F., “Riga dynamo experiment and
its theoretical background,” Phys. Plasmas, 11 (5), 2838 (2004). doi:10.1063/1.1666361.
Gaunt, J. A., “The triplets of helium,” Philos. Trans. R. Soc. London, Ser. A, 122 (790), 513 (1929).
Glatzmaier, G. A. and Roberts, P. H., “A three-dimensional self-consistent computer simulation of
a geomagnetic reversal,” Nature, 377, 203 (1995). URL.
Goldstein, B. E., Smith, E. J., Balogh, A., Horbury, T. S., Goldstein, M. L., and Roberts, D. A.,
“Properties of magnetohydrodynamic turbulence in the solar wind as observed by Ulysses at
high heliographic latitudes,” Geophys. Res. Lett., 22, 3393 (1995). doi:10.1029/95GL03183.
URL.
Goldstein, M. L. and Roberts, D. A., “Magnetohydrodynamic turbulence in the solar wind,” Phys.
Plasmas, 6 (11), 4154 (1999). URL.
Goldwin, J., “Water modeling of a sodium MHD dynamo,” (1999), Hildale Scholar thesis.
Golitsyn, G. S., “On the structure of turbulence in the small-scale range,” Soviet Phys. Doklady, 5,
536 (1960).
Gruzinov, A. V. and Diamond, P. H., “Nonlinear mean field electrodynamics of turbulent dy-
namos,” Phys. Plasmas, 3 (5), 1853 (1996). URL.
Gubbins, D., “Numerical solutions of the kinematic dynamo problem,” Philos. Trans. R. Soc. Lon-
don, Ser. A, 274 (1241), 493 (1973). URL.
Hale, G. E., “On the Probable Existence of a Magnetic Field in Sun-Spots,” Astrophys. J., 28, 315
(1908). doi:10.1086/141602. URL.

120
Jackson, A., Jonkers, A. R. T., and Walker, M. R., “Four centuries of geomagnetic secular variation
from historical records,” Philos. Trans. R. Soc. London, Ser. A, 358, 957 (2000). URL.
Jackson, J. D., Classical Electrodynamics (John Wiley & Sons, Inc., New York, 1999), third edi-
tion.
Kageyama, A., Ochi, M. M., and Sato, T., “Flip-flop transitions of the magnetic intensity and
polarity reversals in the magnetohydrodynamic dynamo,” Phys. Rev. Lett., 82 (26), 5409 (1999).
doi:10.1103/PhysRevLett.82.5409.
Ko, C. M. and Parker, E. N., “Intermittent behavior of galactic dynamo activities,” Astrophys. J.,
341, 828 (1989). doi:10.1086/167540.
Kraichnan, R. H. and Nagarajan, S., “Growth of turbulent magnetic fields,” Phys. Fluids, 10 (4),
859 (1967). URL.
Krause, K. and Radler, K. H., Mean-field Magnetohydrodynamics and Dynamo Theory (Pergam-
mon Press, New York, 1980).
Kuang, W. and Bloxham, J., “An earth-like numerical dynamo model,” Nature, 389, 371 (1997).
doi:10.1038/38712.
Kumar, S. and Roberts, P. H., “A three-dimensional kinematic dynamo,” Proc. R. Soc. London, Ser.
A, 344 (1637), 235 (1975). URL.
Landau, L. D. and Lifshitz, E. M., Statistical Physics (Reed Educational and Professional Publish-
ing, Oxford, 1999).
Larmor, J., “How could a rotating body such as the sun become a magnet?” Rep. Br. Assoc. Adv.
Sci., pp. 159–160 (1919).
Lathrop, D. P., Shew, W. L., and Sisan, D. R., “Laboratory experiments on the transition to mhd
dynamos,” Plasma Phys. & Controlled Fusion, 43 (12A), A151 (2001). doi:10.1088/0741-
3335/43/12A/311.

121
Lehnert, B., “An experiment on axisymmetric flow of liquid sodium in a magnetic field,” Ark. Fys.,
13 (10), 109 (1957).
Lehoucq, R. B., Sorensen, D. C., and Yang, C., ARPACK Users’ Guide: Solution of Large Scale
Eigenvalue Problems with Implicitly Restarted Arnoldi Methods., Computer Based Learning
Unit, University of Leeds, fifth edition (1997). URL.
Leorat, J., Pouquet, A., and Frisch, U., “Fully developed MHD turbulence near critical magnetic
Reynolds number,” J. Fluid Mech., 104, 419 (1981). URL.
Leprovost, N. and Dubrulle, B., “The turbulent dynamo as an instability in a noisy medium,” The
European Physical Journal B, 44, 395 (2005). doi:10.1140/epjb/e2005-00138-y.
Lilley, F. E., “On kinemtic dynamos,” Proc. R. Soc. London, Ser. A, 316 (1525), 153 (1970). URL.
Lowes, F. J. and Wilkinson, I., “Geomagnetic dynamo: A laboratory model,” Nature, 198 (4886),
1158 (1963).
Lowes, F. J. and Wilkinson, I., “Geomagnetic dynamo: An improved laboratory model,” Nature,
219, 717 (1968).
L’vov, V. S., Pomyalov, A., and Procaccia, I., “Temporal surrogates of spatial turbulent statistics:
The Taylor hypothesis revisited,” Phys. Rev. E, 60 (4), 4175 (1999). URL.
Marie, L., Burguete, J., Daviaud, F., and Leorat, J., “Numerical study of homogeneous dynamo
based on experimental von Karman type flows,” The European Physical Journal B, 33, 469
(2003). URL.
Marie, L., Normand, C., and Daviaud, F., “Galerkin analysis of kinematic dynamos in the von
Karman geometry,” Phys. Fluids, 18 (1), 017102 (2006). URL.
Meneguzzi, M., Frisch, U., and Pouquet, A., “Helical and nonhelical turbulent dynamos,” Phys.
Rev. Lett., 47 (15), 1060 (1981). doi:10.1103/PhysRevLett.47.1060.

122
Merrill, R. T., McElhinny, M. W., and McFadden, P. L., The Magnetic Field of the Earth (Academic
Press, San Diego, CA, 1996).
Mininni, P., Alexakis, A., and Pouquet, A., “Shell-to-shell energy transfer in magnetohydrody-
namics. ii. kinematic dynamo,” Phys. Rev. E, 72 (4), 046302 (2005). URL.
Moffatt, H. K., “The amplification of a weak applied magnetic field by turbulence in fluids of
moderate conductivity,” J. Fluid Mech., 11, 625 (1961).
Moffatt, H. K., Magnetic field generation in electrically conducting fluids (Cambridge University
Press, Cambridge, England, 1978).
Muller, U., Stieglitz, R., and Horany, S., “A two-scale hydromagnetic dynamo experiment,” J.
Fluid Mech., 498, 31 (2004). URL.
Muller, U., Stieglitz, R., and Horanyi, S., The Karlsruhe Dynamo Experiment (Forschungszentrum,
2002). URL.
Muller, W.-C. and Biskamp, D., “Scaling properties of three-dimensional magnetohydrodynamic
turbulence,” Phys. Rev. Lett., 84 (3), 475 (2000). doi:10.1103/PhysRevLett.84.475.
Nobach, H., Muller, E., and Tropea, C., “Efficient estimation of power spectral density from laser
Doppler anemometer data,” Experiments in Fluids, 24, 499 (1998).
Nornberg, M. D., Spence, E. J., Kendrick, R. D., Jacobson, C. M., and Forest, C. B., “Intermit-
tent excitation of a magnetic eigenmode in a turbulent flow of liquid sodium,” Phys. Rev. Lett.
(2006a), (in press), arXiv:physics/0606239.
Nornberg, M. D., Spence, E. J., Kendrick, R. D., Jacobson, C. M., and Forest, C. B., “Measure-
ments of the magnetic field induced by a turbulent flow of liquid metal,” Phys. Plasmas, 13,
055901 (2006b). doi:10.1063/1.2173614.
O’Connell, R., Kendrick, R., Nornberg, M., Spence, E., Bayliss, A., and Forest, C., “On the pos-
sibility of an homogeneous MHD dynamo in the laboratory,” in “Dynamo and Dynamics, a

123
Mathematical Challenge,” , edited by P. Chossat, D. Ambruster, and I. Oprea, NATO Science
Programme (Kluwer Academic Publishers, Dordrecht, 2000), volume 26 of NATO Science Se-
ries II, Mathematics, Physics and Chemistry, pp. 59–66.
Odier, P., Pinton, J.-F., and Fauve, S., “Advection of a magnetic field by a turbulent swirling flow,”
Phys. Rev. E, 58 (6), 7397 (1998). doi:10.1103/PhysRevE.58.7397.
Orszag, S. A., “Analytical theories of turbulence,” J. Fluid Mech., 41, 363 (1970).
doi:10.1017/S0022112070000642.
Parker, E. N., “Hydromagnetic Dynamo Models.” Astrophys. J., 122, 293 (1955a). URL.
Parker, E. N., “The Formation of Sunspots from the Solar Toroidal Field.” Astrophys. J., 121, 491
(1955b). URL.
Parker, E. N., “The Origin of Magnetic Fields,” Astrophys. J., 160, 383 (1970).
doi:10.1086/150442. URL.
Parker, E. N., “The Generation of Magnetic Fields in Astrophysical Bodies. II. The Galactic Field,”
Astrophys. J., 163, 255 (1971a). URL.
Parker, E. N., “The Generation of Magnetic Fields in Astrophysical Bodies.IV. The Solar and
Terrestrial Dynamos,” Astrophys. J., 164, 491 (1971b). URL.
Peffley, N. L., Cawthorne, A. B., and Lathrop, D. P., “Toward a self-generating dynamo: The role
of turbulence,” Phys. Rev. E, 61 (5), 5287 (2000). doi:10.1103/PhysRevE.61.5287.
Pekeris, C. L., Accad, Y., and Shkoller, B., “Kinematic dynamos and the Earth’s magnetic field,”
Philos. Trans. R. Soc. London, Ser. A, 275, 425 (1973).
Petrelis, F., Bourgoin, M., Marie, L., Burguete, J., Chiffaudel, A., Daviaud, F., Fauve, S., Odier, P.,
and Pinton, J.-F., “Nonlinear magnetic induction by helical motion in a liquid sodium turbulent
flow,” Phys. Rev. Lett., 90 (17), 174501 (2003). URL.

124
Pinton, J.-F. and Labbe, R., “Correction to the Taylor hypothesis in swirling flows,” J. Phys. II
France, 4, 1461 (1994). doi:10.1051/jp2:1994211.
Ponomarenko, Y. B., “Theory of the hydromagnetic generator,” J. Appl. Mech. Tech. Phys., 14 (6),
775 (1973). doi:10.1007/BF00853190.
Ponty, Y., Mininni, P. D., Montgomery, D. C., Pinton, J.-F., Politano, H., and Pouquet, A., “Nu-
merical Study of Dynamo Action at Low Magnetic Prandtl Numbers,” Phys. Rev. Lett., 94 (16),
164502 (2005). URL.
Pouquet, A., Frisch, U., and Lerot, J., “Strong MHD helical turbulence and the nonlinear dynamo
effect,” J. Fluid Mech., 77 (2), 321 (1976).
Pouquet, A. and Patterson, G. S., “Numerical simulations of helical magnetohydrodynamic turbu-
lence,” J. Fluid Mech., 85 (2), 305 (1978).
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flannery, B., Numerical Recipes in C: The
Art of Scientific Computing (Cambridge University Press, Cambridge, England, 2002), second
edition. URL.
Proctor, M. R. E., “On Backus’ Necessary Condition for Dynamo Action in a Conducting Sphere,”
Geophys. Astrophys. Fluid Dynamics, 9, 89 (1977).
Ravelet, F., Chiffaudel, A., Daviaud, F., and Leorat, J., “Toward an experimental von Karman
dynamo: Numerical studies for an optimized design,” Phys. Fluids, 17 (11), 117104 (2005).
URL.
Reighard, A. B. and Brown, M. R., “Turbulent conductivity measurements in a spherical liquid
sodium flow,” Phys. Rev. Lett., 86 (13), 2794 (2001). doi:10.1103/PhysRevLett.86.2794.
Robert C. Weast, CRC Handbook of Chemistry and Physics (CRC Press, Inc., Boca Raton, FL,
1986), sixty-sixth edition.

125
Roberts, G. O., “Spatially periodic dynamos,” Philos. Trans. R. Soc. London, Ser. A, 266 (1179),
535 (1970). URL.
Roberts, P. H., “Kinematic dynamo models,” Philos. Trans. R. Soc. London, Ser. A, 272 (1230),
663 (1972). URL.
Roberts, P. H. and Stix, M., “α-Effect Dynamos, by the Bullard-Gellman Formalism,” Astron. &
Astrophys., 18 (3), 453 (1972). URL.
Ruzmaikin, A. A. and Shukurov, A. M., “Spectrum of the galactic magnetic fields,” Astrophys.
Space Sci., 82, 397 (1982).
Sarson, G. R., Kinematic Dynamo Calculations for Geomagnetism, Ph.D. thesis, University of
Leeds (1994).
Schekochihin, A. A., Cowley, S. C., Maron, J. L., and McWilliams, J. C., “Critical Magnetic
Prandtl Number for Small-Scale Dynamo,” Phys. Rev. Lett., 92 (5), 054502 (2004). URL.
Schekochihin, A. A., Haugen, N. E. L., Brandenburg, A., Cowley, S. C., Maron, J. L., and
McWilliams, J. C., “The Onset of a Small-Scale Turbulent Dynamo at Low Magnetic Prandtl
Numbers,” Astrophys. J. Lett., 625, L115 (2005). doi:10.1086/431214.
Shpil’rain, E., Yakimovich, K. A., Fomin, V. A., Skovorodjko, S. N., and Mozgovoi, A. G., Dy-
namic and Kinematic Viscosity of Liquid Alkali Metals, International Union of Pure and Applied
Chemistry Chemical Data Series (Blackwell Science Publications, Oxford, 1985).
Sisan, D. R., Shew, W. L., and Lathrop, D. P., “Lorentz force effects in magneto-turbulence,”
Physics of the Earth and Planetary Interiors, 135, 137 (2003). doi:10.1016/S0031-
9201(02)00212-1.
Spence, E. J., Experimental observation of fluctuation-driven mean magnetic fields in the Madison
Dynamo Experiment, Ph.D. thesis, University of Wisconsin-Madison (2006).

126
Spence, E. J., Nornberg, M. D., Jacobson, C. M., Kendrick, R. D., and Forest, C. B., “Observation
of a turbulence-induced large scale magnetic field,” Phys. Rev. Lett., 96 (5), 055002 (2006).
doi:10.1103/PhysRevLett.96.055002.
Steenbeck, M., Kirko, I. M., Gailitis, A., Klyavinya, A. P., Krause, F., Laumanis, I. Y., and Lielau-
sis, O. A., “Experimental discovery of the electromotive force along the external magnetic field
induced by a flow of liquid metal (α-effect),” Sov. Phys.–Doklady, 13, 443 (1968).
Stefani, F., Gerbeth, G., Gailisis, A., Lielausis, O., and Platacis, E., “Have we understood the Riga
dynamo?” in “Perm Dynamo Days Workshop,” , edited by P. Frick (Institute of Continuous
Media Mechanics UB RAS, 2005), p. 69. URL.
Stern, D. P., “A millennium of geomagnetism,” Rev. Geophys., 40, 1 (2002).
doi:10.1029/2000RG000097.
Stieglitz, R. and Muller, U., “Experimental demonstration of a homogeneous two-scale dynamo,”
Phys. Fluids, 13 (3), 561 (2001). URL.
Subramanian, K., “Unified treatment of small- and large-scale dynamos in helical turbulence,”
Phys. Rev. Lett., 83 (15), 2957 (1999). doi:10.1103/PhysRevLett.83.2957.
Sweet, D., Ott, E., Finn, J. M., Jr., T. M. A., and Lathrop, D. P., “Blowout bifurcations and
the onset of magnetic activity in turbulent dynamos,” Phys. Rev. E, 63 (6), 066211 (2001a).
doi:10.1103/PhysRevE.63.066211.
Sweet, D., Ott, E., Thomas M. Antonsen, J., Lathrop, D. P., and Finn, J. M., “Blowout bi-
furcations and the onset of magnetic dynamo action,” Phys. Plasmas, 8 (5), 1944 (2001b).
doi:10.1063/1.1342228.
Taylor, G. I., “The Spectrum of Turbulence,” Proc. R. Soc. London, Ser. A, 164, 476 (1938). URL.
Tennekes, H. and Lumley, J. L., A First Course in Turbulence (MIT Press, Cambridge, MA, 1972).

127
Vainshtein, S. I. and Cattaneo, F., “Nonlinear restrictions on dynamo action,” Astrophys. J., 393,
165 (1992). doi:10.1086/171494. URL.

128
Appendix A: Calculating the Mode Energy
Appreciating the importance of a particular mode in the vacuum field expansion of the magnetic
field can be difficult since the magnitude depends upon the choice of normalization. One way of
characterizing the relative importance of each mode is by calculating the mode’s contribution to
the vacuum field energy.
Recall that the magnetic field is separated into two parts, B0 which is the field generated by
currents generated outside the sphere, and Bi which is generated by currents inside the sodium.
We thus have that ∇ × Bi = 0 for r > a where a is the edge of the sodium. We can thus write
Bi = −∇Φi where Φi is a scalar field. The scalar field satisfies Laplace’s equation due to the null
divergence of Bi yielding
Φi =∑
`,m
D`,m
r`+1Ym
` (θ, φ). (A.1)
The magnetic field can be written as
Bi =∑
`,m
D`,m
r`+2
[(` + 1)Ym
` r − ∂Ym`
∂θθ − 1
sin θ
∂Ym`
∂φφ
]. (A.2)
The energy in the vacuum magnetic field outside of the sodium generated by currents inside the
sphere is then given by
Ei =1
2µ0
∫ ∞
a
r2 dr
∫ π
0
sin θ dθ
∫ 2π
0
Bi ·B∗i (A.3)
where B∗i is the complex conjugate. Substituting Eq. A.2 into Eq. A.3 yields
Ei =1
2µ0
∑
`,m
∑
`′,m′D`,mD∗
`′,m′
∫ ∞
a
r2 dr
r`+`′+4
(` + 1) (`′ + 1)
∫ π
0
sin θ dθ
∫ 2π
0
dφ Ym`
(Ym′
`′
)∗
+
∫ π
0
sin θ dθ
∫ 2π
0
dφ
[∂Ym
`
∂θ
(∂Ym′
`′
∂θ
)∗+
1
sin2 θ
∂Ym`
∂φ
(∂Ym′
`′
∂φ
)∗](A.4)
The radial integral is calculated to be∫ ∞
a
dr
r`+`′+2= (` + `′ + 1)
−1a−(`+`′+1). (A.5)

129
Due to the orthogonality of the spherical harmonics, we have that∫ π
0
sin θ dθ
∫ 2π
0
dφ Ym`
(Ym′
`′
)∗= δ`,`′ δm,m′ (A.6)
where δ`,`′ is the Kronecker Delta.
To address the second and third terms, the spherical harmonics are decomposed into Legendre
polynomials and complex exponentials:
Ym` (θ, φ) =
√2` + 1
4π
(`−m)!
(` + m)!Pm
` (cos θ)eimφ. (A.7)
The polar and azimuthal derivatives are thus
∂Ym`
∂θ=
√2` + 1
4π
(`−m)!
(` + m)!
dPm`
dθeimφ (A.8)
∂Ym`
∂φ= im
√2` + 1
4π
(`−m)!
(` + m)!Pm
` (cos θ)eimφ (A.9)
The second and third terms in the energy equation become
∫ π
0
sin θ dθ
∫ 2π
0
dφ
[∂Ym
`
∂θ
(∂Ym′
`′
∂θ
)∗+
1
sin2 θ
∂Ym`
∂φ
(∂Ym′
`′
∂φ
)∗]
=
√2` + 1
4π
(`−m)!
(` + m)!
√2`′ + 1
4π
(`′ −m′)!(`′ + m′)!
×∫ π
0
sin θ dθ
(dPm
`
dθ
dPm′`′
dθ+
mm′
sin2 θPm
` Pm′`′
) ∫ 2π
0
dφ ei(m−m′)φ. (A.10)
Recognizing the orthogonality of the azimuthal integral gives
∫ π
0
sin θ dθ
∫ 2π
0
dφ
[∂Ym
`
∂θ
(∂Ym′
`′
∂θ
)∗+
1
sin2 θ
∂Ym`
∂φ
(∂Ym′
`′
∂φ
)∗]
=
√2` + 1
4π
(`−m)!
(` + m)!
√2`′ + 1
4π
(`′ −m′)!(`′ + m′)!
×∫ π
0
sin θ dθ
(dPm
`
dθ
dPm′`′
dθ+
m2
sin2 θPm
` Pm′`′
)2π δm,m′ (A.11)

130
The remaining polar integral can be solved by integration by parts. First, the variable of integration
is changed to x = cos θ so that∫ π
0
sin θ dθdPm
`
dθ
dPm`′
dθ=
∫ 1
−1
(1− x2
) dPm`
dx
dPm`′
dxdx (A.12)
= −∫ 1
−1
[d2Pm
`
dx2
(1− x2
)− 2xdPm
`
dx
]Pm
`′ dx (A.13)
=
∫ 1
−1
[` (` + 1)− m2
1− x2
]Pm
` Pm`′ dx (A.14)
where in the last equality the associated Legendre equation to eliminate the derivatives. The inte-
gral can now be written as∫ π
0
sin θ dθ
[dPm
`
dθ
dPm`′
dθ+
m2
sin2 θPm
` Pm`′
]= ` (` + 1)
∫ 1
−1
Pm` Pm
`′ dx
=2` (` + 1)
2` + 1
(` + m)!
(`−m)!δ`,`′ .
(A.15)
and so the integral becomes∫ π
0
sin θ dθ
∫ 2π
0
dφ
[∂Ym
`
∂θ
(∂Ym′
`′
∂θ
)∗+
1
sin2 θ
∂Ym`
∂φ
(∂Ym′
`′
∂φ
)∗]= ` (` + 1) δ`,`′δm,m′ . (A.16)
Putting all the terms together results in the energy equation
Ei =1
2µ0
∑
`,m
∑
`′,m′
D`,mD∗`′,m′
(` + `′ + 1) a`+`′+1
[(` + 1)2 + ` (` + 1)
]δ`,`′δm,m′ (A.17)
=1
2µ0
∑
`,m
∑
`′,m′
D2`,m
a2`+1
(2` + 1) (` + 1)
2` + 1(A.18)
=1
2µ0
∑
`,m
∑
`′,m′
D2`,m
a2`+1(` + 1) (A.19)
Hence the energy in a particular mode (`,m) of the internal magnetic response can be written as
Em` =
` + 1
2µ0a2`+1D2
`,m. (A.20)
Likewise, the energy contained within the sphere due to the externally applied field can be
calculated. This time the field is described by the magnetic potential
Φ0 =∑
`,m
C`,mr`Ym` (θ, φ). (A.21)

131
The external magnetic field can be written as
B0 = −∑
`,m
C`,mr`−1
[`Ym
` r +∂Ym
`
∂θθ +
1
sin θ
∂Ym`
∂φφ
]. (A.22)
The energy in the vacuum magnetic field inside the sphere generated by currents in the external
field coils is then
E0 =1
2µ0
∫ ∞
a
r2 dr
∫ π
0
sin θ dθ
∫ 2π
0
B0 ·B∗0 (A.23)
Going through the same calculation as above yields
E0 =1
4µ0
∑
`,m
`a2`+1C2`,m. (A.24)
Hence the energy in a particular mode (`,m) of the externally applied magnetic field can be written
as
Em` =
`a2`+1
4µ0
C2`,m. (A.25)