The Robot-Era Domestic Robot: Kinova Jaco and MoveIt...
9
University of Hamburg Robot-Era Kinova Jaco and MoveIt! The Robot-Era Domestic Robot: Kinova Jaco and MoveIt! MoveIt! tutorial, ICRA-2013 Norman Hendrich, Johannes Liebrecht, Jianwei Zhang University of Hamburg MIN Faculty, Dept. of Informatics Vogt-K¨olln-Str. 30, D-22527 Hamburg [email protected] 10/May/2013 N.Hendrich 1
Transcript of The Robot-Era Domestic Robot: Kinova Jaco and MoveIt...
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
The Robot-Era Domestic Robot:Kinova Jaco and MoveIt!
MoveIt! tutorial, ICRA-2013
Norman Hendrich, Johannes Liebrecht, Jianwei Zhang
University of HamburgMIN Faculty, Dept. of Informatics
Vogt-Kolln-Str. 30, D-22527 [email protected]
10/May/2013
N.Hendrich 1
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
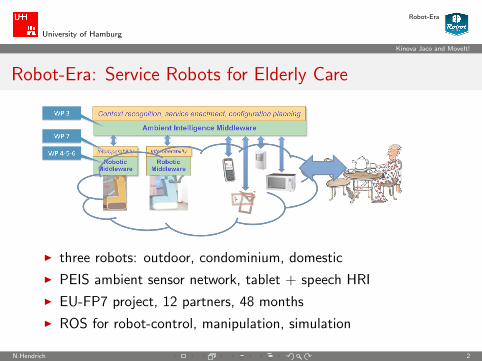
Robot-Era: Service Robots for Elderly Care
I three robots: outdoor, condominium, domestic
I PEIS ambient sensor network, tablet + speech HRI
I EU-FP7 project, 12 partners, 48 months
I ROS for robot-control, manipulation, simulation
N.Hendrich 2

University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
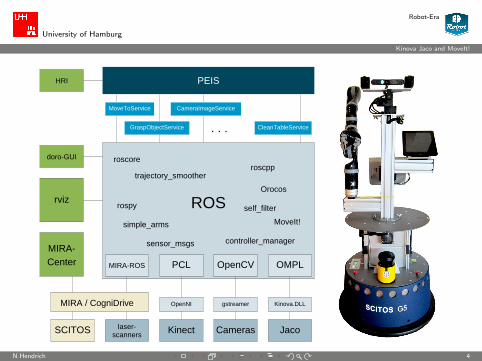
Domestic Robot: manipulation services
I differential-drive platform, sensor-headI one Kinova Jaco arm with gripperI prototypes about 70K EUR
N.Hendrich 3
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
self_filter
controller_manager
simple_arms
Orocos
sensor_msgs
trajectory_smoother
rospy
roscpproscore
ROS
MIRA-ROS OMPLOpenCVPCL
CleanTableService
CameraImageServiceMoveToService
GraspObjectService
HRI
doro-GUI
SCITOS
PEIS
OpenNI gstreamer Kinova.DLL
. . .
rviz
CenterMIRA-
MIRA / CogniDrive
CamerasKinectlaser-scanners Jaco
MoveIt!
N.Hendrich 4
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
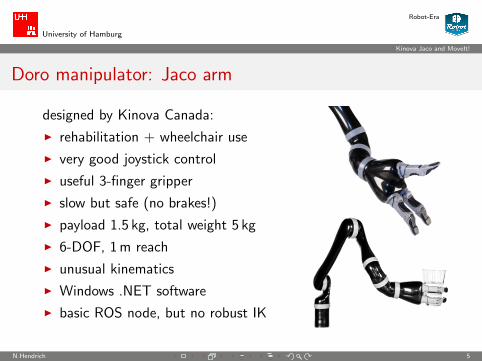
Doro manipulator: Jaco arm
designed by Kinova Canada:
I rehabilitation + wheelchair use
I very good joystick control
I useful 3-finger gripper
I slow but safe (no brakes!)
I payload 1.5 kg, total weight 5 kg
I 6-DOF, 1 m reach
I unusual kinematics
I Windows .NET software
I basic ROS node, but no robust IK
N.Hendrich 5
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
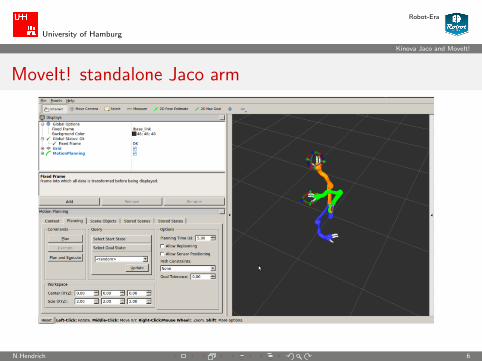
MoveIt! standalone Jaco arm
N.Hendrich 6
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
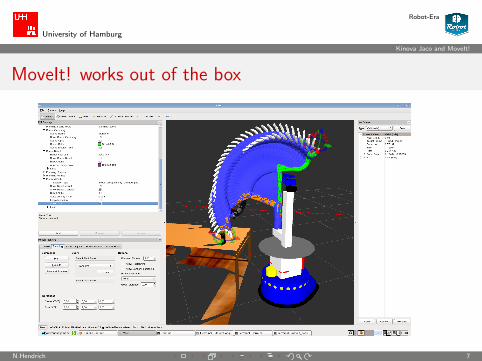
MoveIt! works out of the box
N.Hendrich 7
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
MoveIt! status and future work
I setup is really easy, assistant works fine
I trajectory planning and generation works
I trajectory replay on Jaco works
I missing Kinova IK not a problem anymore
I self-collision model not perfect
I OMPL/RRT fast enough
I mixing Fuerte (Gazebo) and Groovy (MoveIt) ok
I working on the gripper now
N.Hendrich 8
University of Hamburg
Robot-Era
Kinova Jaco and MoveIt!
Discussion
I Thanks for your attention!I Questions?
I www.robot-era.eu/I [email protected]
I ROS incredibly useful
I MoveIt! very promising
I Acknowledgments: funding by project Robot-Era, FP7-288999
N.Hendrich 9