THE PISTON MOTION IN A FREE-PISTON DRIVER FOR SHOCK … · 2017-08-22 · helium in front of the...
41
Transcript of THE PISTON MOTION IN A FREE-PISTON DRIVER FOR SHOCK … · 2017-08-22 · helium in front of the...

3tM^6W~v^&*^.
FM 88-1
THE PISTON MOTION IN A FREE-PISTON DRIVER
FOR SHOCK TUBES AND TUNNELS
by
Hans G. Hornung
Graduate Aeronautical Laboratories
California Institute of Technology
Pasadena, California 91125
January, 1988

-2-
1. Introduction
The purpose of a free-piston driver is to generate, in a volume of gas, conditions of sufficiently high
temperature and pressure to serve as the driver gas for a shock tube in which a fast shock wave is to be
generated. This is achieved by adiabatic compression of the driver gas. To drive a fast shock, the
speed of sound in the driver gas must be high. Hence a light gas at a high temperature is desirable.
Helium is particularly suitable as a driver gas (the gas that is being compressed by the piston) because it
has no low-energy internal degrees of freedom and hence behaves like a perfect gas up to relatively
high temperatures. Consequently, less energy is required to raise the temperature of helium to the high
value needed than is the case for hydrogen for example.
The operation of the free-piston driver is as follows: Compressed air typically at a pressure of 100
atm. drives a heavy piston (typically 100 kg) from the left along a cylindrical compression tube
containing helium (typically at a pressure of 1 atm). The tube is closed at the right hand end by a
diaphragm, whose burst pressure is typically 900 atm. These pressures are such as to cause the piston
to compress the helium to 1/60 of its original volume before the diaphragm bursts. At that time the
temperature in the helium is 4500 K if it started at room temperature.
In this report, a set of model equations is set up to describe the piston motion in order to be able to
choose the parameters governing it for optimum performance. The effect of assumptions made in order
to achieve a sufficiently simple model is discussed, and examples of the use of the model in a particular
design problem are given.
2. The process before diaphragm rupture
In the operation of a free-piston driver with helium, the typical piston speed reaches values around
300 m/s. This approaches the speed of sound in the air behind the piston but is very subsonic in the
helium in front of the piston. The acceleration of the piston and the length of the tube are such that no
shock waves are formed in the helium within the compression tube. Hence, the helium may be
considered to a good approximation to be spatially uniform at any time, undergoing a quasi-steady
adiabatic compression until diaphragm rupture. The dissipation caused by vortical flows arising from
the piston-tubewall junction is neglected.
On the left hand side of the piston, the tube is assumed to have infinite extent, so that the expansion
waves generated by the piston acceleration are not reflected back to the piston and the conditions in the
air may be calculated by assuming it to be subjected to a simple wave.
The piston is assumed to seal perfectly and to move in the tube without friction.
2.1 Model equations
Let the initial pressure in the air be pAo, the initial pressure in the helium be pHo, the piston speed
(positive to the right) be u, the initial distance of the piston from the diaphragm be L, its variable value
being x. The inertia of the helium is neglected throughout.
The air pressure/^ at the left side of the piston is then given by

-3-
Pa = 1-
1
2 ao (1)
where a0 is the initial speed of sound in the air and yA is the ratio of specific heats in the air (7/5)
which is being considered as a perfect gas.
The helium pressure pH on the right side of the piston is given by
f *\-i x
Ph=,
where 7 is the ratio of specific heats of helium (5/3). Hence the equation of motion of the piston is
-M
(2)
(3)
where M is the piston mass, D is the compression tube diameter, and t is time measured from piston
release.
This assumes that the reference frame is ineru'al, which it is not if the compression tube is free to
recoil. We assume that the compression tube is so heavy that the recoil motion may be neglected.
Introducing the dimensionless variables
t dn
(4)
equation (3) together with the relevant initial conditions may be written as
4 =-♦
b<> = —- ^r
(5)
where the dot denotes differentiation with respect to 1 and the parameters b\ and ̂ are given by
(6)

-4-
2.2 Results from numerical solution of the model equations
The nonlinear equations (5) cannot be solved in a closed form but arc easily solved numerically.
Examples of their solution are presented in Fig. 1 and Fig. 2 for LID = 100, as phase plane (£-<$>) plots
and as time-distance (tau -xi) plots respectively for a set of values of the parameters b \ and b2. Tlie
calculation is terminated at £ = £r 3xrID. Fig. 3 shows the values of <J>r = ur/a0 resulting from such
computations for LID = 100, £r = 5/3 and LID = 60, §r = 1, as functions of b\ and b2.
Qearly, tlie velocity of the piston at diaphragm rupture is very sensitive to the values of tlie
parameters b \ and b2. It will be seen in the next section Uiat the piston speed at rupture is an important
parameter for the piston motion after rupture.
3. Piston motion after diaphragm rupture
3.1 Conditions behind the piston
Figures 1 and 2 show that the piston acceleration just before diaphragm rupture is an order of
magnitude greater than its initial acceleration. The distance, s, behind the piston at which a shock wave
is formed because of the steepening of tlie compression waves originating from the piston may be
estimated from
2ar2
where ar is tlie speed of sound in tlie air at diaphragm rupture and A is the piston acceleration. A
typical value for the cases computed in Fig. 2 is s = 3 D. The time for waves to traverse this distance
is small compared to the time scale of the piston motion. Hence, it will be assumed that tlie pressure on
the back face of tlie piston is given by the pressure after the shock that would be generated if the piston
were stopped instantaneously at diaphragm rupture.
The Mach number, Mr, of tlie shock generated is given by
(8)
where ar is tlie speed of sound in the air at the piston face before the shock is generated. ar is given by
ar t_i ur
~ = 1 + V • (9)
Since urla0 is known from the computation in tlie previous section, the Mach number of tlie shock may
be obtained from a solution of the quadratic equation resulting from combination of (8) and (9)
Mr2 — A/r-l=0 (10)

-5-
as (yA = 7/5 is substituted)
O.6ur/ao 0.6m,/a o (11)
l+0.2Mr/a0
Hence, the pressure at the piston face after the shock has been generated is
n lM2-\ PAr =PaS\ -0.2Mr/a0)7 • - , (12)
where the shock jump conditions have been used. Fig. 4 shows the variation of PatIPa* with ur/ao. It
will be assumed that tlie pressure behind the piston remains constant at paf after diaphragm rupture.
3.2 Conditions in front of the piston
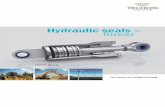
In order to illustrate die situation after diaphragm rupture in the helium, Fig. 5 shows the
construction of an actual device of this kind. The piston, which has a cup-shaped front end, continues
to move to the right after the diaphragm breaks, thus pushing the helium while this is expanded into the
shock tube through the holes in tlie pressure plate and striker plate. There comes a time, when the lip
of the cup engages with the annular space around the pressure plate, thus sealing this space off and
preventing the helium trapped in it from expanding into the shock tube. This device serves to continue
decelerating the piston and preventing it from running into the end of the compression tube.
During tlie time before trap engagement, it is assumed that the area of the striker plate holes acts as
the throat area for a steady expansion from the conditions pertaining in the main space between tlie
piston and the end of the tube. Tlie diaphragm is assumed to rupture in zero time and the conditions in
the helium are assumed to be spatially uniform.
After trap engagement, the leakage from the trap into tlie main space is also assumed to be sonic at
the gap area and the mixing is assumed to occur isentropically.
At trap disengagement, the gases from the trap and the main space are assumed to mix
isenthalpically in zero time.
33 Conditions in the main space before trap engagement
Let the mass of helium in the main space be m and its value at diaphragm rupture be mr. The rate
of change of mass in the main space because of tlie outflow into the shock tube is
2(y-i) nd2 • -^r- . (13)
where p is tlie helium density and d is the equivalent diameter of the striker plate holes, considered as
one hole of the same area. Rewriting (2) for 7= 5/3,

-6-
dm _ 9
dt 64
Isentropic changes in the driver gas imply
Ph_
Pr
5/3
The density and m are related through
p = m • —5-
1tD2X
Replacing p in (15) from (16) results in
Ph
Substituting (16) and (17) into (14) yields
dm __Q_rc_
dt " 32
mr
5/3
m
5/3
4/3
where pr is the rupture pressure of the diaphragm.
3.4 Equations of motion
3 A.I Equations of motion before trap engagement. The equation of motion of the piston
..dh. , 2
(14)
(15)
(16)
(17)
(18)
(19)
may now be closed by using (17) and (18) to obtain pH, the constant p^r having been determined as a
function of ur/a0 in equations (11) and (12). The result is the coupled set of differential equations
..dh
M-d7=PA'
and (18). Introducing the dimensionless variable
(20)
m (21)
we obtain

-7-
(22)
where
K_
4 Mai Pa
j3 K
Pa, Pa,
~b\~:~
fc5/3_^__£ Pr t5/3 _
Mai T Pao Pa0 i
D
1/2
D2
(23)
Again this set of equations has to be solved numerically and the result depends on tlie five parameters
£r»<J>r« ^3. b4, bs. However, fc3 and (J)r may be expressed in terms of b\, bi and LID, and b4 may be
expressed in terms of bh b2 and £r. Hence, the five parameters are not five new parameters, but the
total number of independent parameters including the three of tlie problem defined by (5) and (6) is five.
3.42 Equations of motion after trap engagement. Let the diameter of the trap inner side be D \ and
the outside diameter of tlie pressure plate be D x - 2G, G being the gap width specifying the sonic
throat area nD \G for leakage from the trap. The leakage is assumed to occur without friction and heat
transfer, as this is an area where optimization involves experiment in any case. Assume further that the
trap engagement occurs in zero time and that the pressure difference across the leakage area is
immediately sufficient for sonic conditions to be reached.
At engagement, divide the mass into the mass in the trap, mt, and the mass in the main space, ms:
mt =0-
El
D
,..S - „ r.M
where m i is the value of m at engagement. Thereafter,
dm, 9kDxG
(24)
dt 16 •Pi
LEl 3 p,
(25)

-8-
4mt
n(D2-D2)x
5/3
and
so that
Pt = P/_
Pi
(26)
(27)
dmt 9nDxG
dt 16
5 Pi
3pi5/3 n{D2-D2)
4/3 4/3
(28)
and
Pt = Pi
5/3 n(D2-D2)
5/3 5/3
(29)
Meantime, in the central portion, i.e., the main space, the drainage through the diaphragm holes
continues while the leak from the trap adds to the mass ms. Thus,
dms
dt 64
4/31 5 Pr
4/3
dmt
~dT ' (30)
and
Ps =Pr '
5/3
(3D
The equation of motion of the piston may be written as
Substituting from (29) and (31) gives
4 A + jP'-affc-^r pAr (32)
M dt2
D-Ar.lL 5/3
5/3
X
5/3
(33)
where use has been made of the fact that/? i/pf3 =/?r/pr5/3. Introducing the dimensionless variables
_ mt mx _ ms (34)
we obtain the equations of motion in dimensionless form

-9-
with
1-
(35)
D? (36)
and
(37)
In equation (36) as elsewhere the subscript 1 refers to the value at trap engagement. Clearly, the new
parameters b6 to b9 contain only three independent new parameters that arise because of the new
geometric parameters D \ID, GID and §i.
3.43 Equations of motion after trap disengagement. At disengagement the assumption that mixing
occurs at constant total enthalpy between the trap gas and the main space gas means that
P = 1-D2
+ Ps El D2
(38)
where pt and ps are the pressures in the trap and main space respectively, just prior to disengagement.
This causes the entropy to increase and it becomes necessary to adjust the dimensionless parameters of
section 3.2.2, though the equations remain the same, i.e., equations (22) apply with the new parameters.
The parameters concerned are b<\ and i>5 which become
El Ps
1- Ei D
El D
(39)
and

-10-
m 1-D2 D
1/2
(40)
4. Results from numerical solution without trap
4.1 The significance of the parameter b$
It is now necessary to achieve a piston path such that the pressure in the main space is as nearly
constant over as long a time after diaphragm rupture as possible. To achieve this, we first consider the
problem before trap engagement, because only this part of the process is significant during the operation
of the shock tube, the later phase serving only to catch the piston gently.
The process is dominated by the parameter
16
which may be rewritten by expressing Mlmr as
D 2 •
M_ 1 (41)
where ao//« and <*0Air are the speeds of sound in air and helium at room temperature. Substituting this
into the expression for b5,
bs 9 ^
or
(42)
The piston motion, and therefore the pressure history in the main space is thus determined for this
phase of the motion by the equations (22) and the parameters
(43)
= b5(L/D,d/D) .
As may be seen from (43), the only new parameter beyond the ones needed to determine <j>r (namely
b\, bi, ̂ r, LID) is dID. This is not surprising, as the rate of pressure rise at diaphragm rupture is
governed by the area ratio d2ID2 and the piston speed <$>r. hi fact, the value of §r for constant pressure
at rupture may be determined from

-11-
v*i
A,1'3 <*OAir D
2 *
or
(44)
where
(45)
I.e.,
(46)
4.2 Results for X = 60
Choosing the volumetric compression ratio X to be 60, yields a helium condition at rupture of
particular interest here. It also connects £r and LID through (45).
In the solution of the problem without a trap, i.e., of the initial value problem (for i> zr)
(22)
there are four independent parameters
K
Pa0
D

-12-
and bs = . . ^
b3 being given in terms of b\ and <j)r by (11) and (12). A possible way to proceed in the choice of
parameters is as follows:
1. Choose LID
2. Choose dID giving b5, see above
3. Select a combination of bi and b2t using Fig. 3 with the appropriate LID, such
that<|>r >§rc =6A5d2/D2.
4. Read <J>r from Fig. 3
5. Determine ̂ 3(^1, <t>r)
6. Numerically solve (22)
7. Assess whether constancy of pressure and its duration are satisfactory
8. Iterate
This process has been performed for the two values of LID of 100 and 60. Examples of the pressure-
time solutions are given in Figs. 6a-d. Step 7 was achieved by noting the time interval tca^D -xc,
over which the pressure in the main space deviates from its maximum value by 10% or less. The
method is illustrated in Fig. 7.
At each set of parameters, the value of bs is varied and the maximum value of xc (value at
dxcldbs = 0) is noted as xCma. The value of b$ at which this maximum occurs is noted as ^5^. Fig. 8
shows lines of constant xCaix thus obtained in a plot of b2 vs. b\. As may be seen, xCam increases
monotonically with decreasing b\, i.e. e.g., with increasing piston mass, while xCaAX is relatively
insensitive to b2.
4.2.1 Example of choice of parameters. Best xCma. Considering the case of a particular value of
LID, say 100 in Fig. 8, we may now see the effect of fixing the piston mass on the freedom to move
around in the parameter space. The product
D Mai
depends only onpnJM \fX,LID,D,aoarc chosen. In that case, lines b\b2 - constant are also lines
of constant pnJM. When the piston mass is fixed, it is therefore only possible to move from one value
of b \b2 to another by varying pn0. For a given diaphragm burst pressure and lambda ,p sub H sub
Oisfixed Jiowever jothat,atatafixedsetofthevariables.EQ\,pr, LID, D, ao and M'H is only possible to
move along the line b \b2 - constant which passes through the design point. This can be achieved by
varying pAo. Let us choose the point b\ =0.012, b2 = 25 as an example of the design point, giving
xCan = 2.2 at b5 = 0.48 and <t>r = 0.55. The corresponding line b \b2 = 0.3 is also shown in Figs. 3 and
8. If the values of the above list of variables are

-13-
pr = \OOMPa
LID = 100
D = 0.3m
and 6^2 = 0.3
then
=0.3
so that this line b\b2 = 0.3 corresponds to a line M = 153*g. Then, if for example the diaphragm burst
pressure is to be raised to 180 MPa, this requires pn0 to be raised by a factor of 1.8 also. If the design
line (ft \b2) is not to be altered in Fig. 8, the piston mass must be increased by a factor of 1.8 also. This
is often impractical, and it is therefore interesting to see how far leaving the piston mass at 153 kg puts
us off design. The new value of b \b2 is 1.8 x 0.3 = 0.54. This line is also shown in Fig. 8 and in Fig.
9 which is a repeat of Fig. 3 in order to have this information on the same page as Fig. 8. As may be
seen, the value of xCmM is reduced, reaching a maximum of 1.8 at b2 = 26 and b\ - 0.021.
Going through the same exercise with a heavier piston, i.e., starting with a design point at
b xb2 - 0.2, at ft i = 0.08, b2 = 25, giving iCaa = 2.4 at ft5 = 0.5 and <t>r = 0.53, leads to a piston mass of
230 kg and a shift of the design curve to ftift2 = 0.36.
Clearly, a heavier piston gives larger values of TCmu. Also, running off-design at higher diaphragm
burst pressures reduces iCmu and vice versa. A good compromise in this case appears to be M = MSkg,
at
fti=0.01 ft5 = 0.5
ft2 = 25 <{>r = 0.53
X = 60 giving xCaa = 2.4
LID =100 Pr _ \00MPa
D = 0.3m
at the design point and
<J)r = 0.6
%Caa = 1.9
pr = \S0MPa
pAo = \6MPa
at the higher pressure.
In a similar way, design parameters were chosen for the two cases

-14-
LID = 60 , %r = 1 , D = 0.3m
and LID = 40 , £r - 0.667 , D = 0.3m .
The results are shown in Figs. 8bc and 9bc.
In this method of choosing the parameters, use has tacitly been made of a feature of the surface
xCmJibh bj) in Fig. 8. At each value of bit decreasing the value of b2 causes xCaux to increase rapidly
until it reaches a maximum value at a fairly sharply defined value of b2. It is desirable to locate the
design point along this ridge, or just to the higher -b2 side of it, because this allows the best xCma to be
attained for the highest ratio of helium to air pressure (highest b^, i.e., with the smallest piston energy
at burst, for a given b\. Clearly, this is the condition at which it is likely to be easiest to catch the
piston gently, yet at the highest xCmtx. The ridge defines a best off-design direction in the (b\ b^-spacc,
which is shown in Figs. 9 as a dashed line. It should be pointed out here that Fig. 8 represents a highly
condensed set of information, each point in it involving an integration of equations (5) and
approximately 7 integrations of equations (22).
4.2.2 Example of choice of parameters. Fixed dID. In the last section, the value of bs was varied to
optimize xCatx. If, however, the equivalent shock tube (and diaphragm-burst) diameter is to be fixed, this
constrains d, and xc is reduced. For example, comparing the optima obtained for
LID = 100, 60, and 40 in the last section, they occur at shock tube diameters of
0.076m , 0.061m , and 0.049m
respectively. If instead the equivalent shock tube diameter d is fixed at, say, 0.085m, the corresponding
values of b 5 are
0.614 , 0.518 , and 0.452
respectively, instead of the b 5 values for optimum xCma, namely
0.486 , 0.265 , and 0.152 .
Clearly, this will have a considerable effect on xc, and its best value will occur at a different value of
The corresponding computation of xc yields the values plotted in Figs. lOabc. A suitable design
point taking into account piston mass and air pressure limitations is plotted in each of these plots. The
values of xc corresponding to these design points and obtained from Fig. 8 arc both plotted in Fig. 11
against LID for the case d = 0.085m, D =0.3m. For a given shock tube diameter, it is seen that
increasing LID has an even more significant positive effect on xc than if the shock tube diameter is
allowed to vary for optimum xc.
5. Results from calculations with the trap
The discussion in this chapter will be restricted to the case LID - 100. It will also be assumed that
the design point has been chosen in Figs. 8 and 9, and that any deviation from this occurs along the best

-15-
off-design direction shown in Fig. 9. Hence, only one degree of freedom remains among the parameters
There are, however, three new parameters, D \ID, XXID and GID defining the geometry of the trap.
In order to choose the best values of these three parameters, we will be guided by the need to restrict
the pressure in the trap to less than or approximately the same as the maximum pressure reached in the
main space for strength reasons, and the need for the piston to reach the end of the tube with the
smallest possible speed. A further condition is that the trap should only engage when more than the
time corresponding to xCaa has elapsed from the instant of diaphragm burst. This sets an upper limit on
X XID immediately. In addition, a lower limit for D \ID is imposed by the need to accommodate a
sufficiently large opening d for the diaphragm burst, especially if the multiple hole arrangement of Fig.
5 is used. An upper limit is imposed on D \ID through the strength requirement on the lip and the need
to accommodate a piston ring.
The last two requirements are used immediately to choose D\ID as 0.65, and X\ID as 0.5. Hence,
it is only necessary to optimize the pressure trace and piston trajectory by using GID. In fact, an
additional parameter was introduced in the operation of the trap by making the gap vary linearly with xi
from the instant of engagement. This may be accomplished by making both the piston and the pressure
plate slightly conical. The result is that the gap starts out at a value G\ at \ = %x and finishes with a
value G2 at £ = 0, varying linearly with § in between. An example of the result of playing with these
two parameters for optimization is shown in Fig. 12. The pressure trace and piston trajectory are fairly
sensitive to G1 and G% and this is an area where it will be necessary to proceed by experimentation.
6. Effect of the shock tube length on the piston path.
Let the flow at the diaphragm be sonic, this condition being reached through a steady expansion
from the conditions in the main space. If the speed at the diaphragm is ad, the shock generated at the
end of the shock tube by stopping this flow has a Mach number given by
1 =
i.e. M2 - -^-M -1=0
2
Y+-1 -i
M =-1t^ + 4 16
+ 1
1/2
= 1.87
Hence the speed of the shock relative to the shock tube is 0.87^. Thus the time from diaphragm burst
to return of the shock to the diaphragm station is
, ■ ' , / ,2 1 l d ad 0.87a,, * ad
where / is the shock tube length. The pressure behind the shock is given by the shock jump condition
operating on the pressure at the throat (diaphragm) in the steady expansion.

-16-
The reflected shock raises tlie pressure in the main space to a considerable value again, which it will
not be attempted to estimate here. Hence, the piston motion at time later than td cannot be predicted
from the present work. Suffice it to say, that, for a shock tube length of 8m, and X = 60, td is
approximately 5ms. With D = 30cm, this corresponds to tarfD = 5.5. By this time, Fig. 11 shows the
piston to be virtually stationary. Tlie increase of the pressure in the main space due to the reflected
shock therefore acts to make the piston rebound if anything, and the action of the trap would have to
serve to catch it gently during the second forward motioa
7. Estimates of the effect of some of the assumptions made.
7.1 Neglecting friction
The friction between tlie piston and the compression tube wall depends on how tightly the piston
rings fit. A crude estimate of an upper bound for the friction force is 3 times the weight of the piston,
or 3 Mg. Comparing this force with tlie force exerted on the piston by tlie air pressure, —pAD*, it may
be seen that friction is negligible if
12 Mg ^7 « 1
k Pad2
4 Mai gD or 3 t - -^r «\
3 a02
Now si ID is typically 360,000m Is2 and b\ is typically 0.01, so that tlie l.h.s. of the inequality is
approximately 0.01, and friction will not cause significant differences from the results computed with
the model equations. Its effect would be to lower §r slightly.
7.2 Neglecting leakage past the piston
The leakage may (pessimistically) be treated as if a sonic throat area corresponding to the clearance
between the piston and the tube wall were effecting the leak. This clearance is in fact zero when the
piston rings are new, but may increase to approximately 0.01 mm. Thus the area of the gap, for a
piston of 0.3m diameter, is 2 x 10~5m2. The piston area is 0.09m2. Comparing the gap area with the
typical shock tube area (5 x 10"3m2) it may be seen that the maximum leak rate past the piston will be
considerably less than one percent of the leak into the shock tube. The effect of varying the parameter
b 5 by 1% is almost indiscernible in the results, and the leak past tlie piston would have less effect.
73 Neglecting the reflected waves in the air.
In calculating pA, it was assumed that no waves are reflected from the 1. h. end of the compression
tube. An alternative assumption that would err on the other side of the actual value of pA would be that

-17-
the air is expanded in a steady expansion corresponding to the piston speed. Let the pressure
corresponding to that assumption be pA. Then
7/2
1-0.24 Pa_
Pa
At very small values of u/ao, i.e., during the initial motion of the piston, the ratio is 1. At values of
u/ao greater than 0.4 the reflected waves may be seen not to be able to reach the piston from the x-t
diagrams in Fig. 2 during the period of interest. There is a region between, where the difference is
significant. For example, at u/ao - 0.2,
— = 1.29 , Pa
the time value being somewhere between pA and pA. Up until u/ao =0.4, however, the piston has
only moved typically 5 diameters (see Fig. 1) so that the bulk of the work done on the piston is
delivered later. Hence, this error is not as large in the total contribution. Nevertheless, the effect of the
assumption is to reduce the value of pAg needed to drive the piston by typically 5% below that evaluated
from b\, if the same piston trajectory is to be achieved.
It makes little sense however, to make more precise calculations of pA, since these depend very
much on the details of the construction of the l.h. end of the compression tube. The effective pA has to
be determined in a real case by experiment
8. Conclusions
The equations of motion of the piston in a free-piston driver have been written down using a
particular set of simplifying assumptions. The solution of these equations is presented in the form of a
parameter study aimed at outlining possible ways of choosing these parameters in a design. In
particular, the time of pressure constancy in the driver is considered as a parameter to be maximized
under two different constraint conditions, and with restrictions on air driving pressure and piston mass.
A further optimization of a trap for catching the piston gently is described. This work relies heavily on
previous work of Stalker and experience gained in the construction and operation of a free-piston shock
tunnel during the time when the author was a colleague of Stalker's 1967-1980, see References.
9. References
[1] R. J. Stalker (1967) A study of the free piston shock tunnel. AIAAJ. 5, pp. 2160-2165.
[2] R. J. Stalker (1987) Shock tunnel for real gas hypersonics. AGARD CP 428.
[3] H. G. Hornung (1986) Laboratory simulation of the real gas effects of reentry. In: Fluid
mechanics and space. ESA publication SP-265.

-19-
Appendix 1: Nomenclature
b6
bi
d
D
g
G
L
m
M
P
s
t
u
X
Y
X
P
t
PAo
= 1.65 D
1/3
4i D2
b9 =b5
2I{D2-D2)]m
= 6.6\(L/D)m[D2/(D2-D2))4f3
D2
D2
4/3
DXG
~D2~
equivalent shock tube diameter
diameter of compression tube
acceleration of gravity
gap width in trap
length of compression tube
mass of helium
mass of piston, Mach number
pressure
distance from piston on the air side
time measured from instant of piston launch
piston speed
distance of piston from diaphragm
ratio of specific heats
volumetric compression ratio
density
= u/a0
= x/D

-20-
Subscripts
A air
c during constant pressure time
H helium
r at diaphragm rupture
s main space
t trap
0 before piston launch
1 at trap engagement

-21-
Appendix 2: Equations and parameters
Time interval 0 < x < xr
Input
LID
b2
interval xr < x < X\
Input
= 63(^1, <J)r)
= b\b2
= b5(L/D,d/D)
interval X\ < %
Input
DXID
GID
Equations(5)
Equations(22)
Equations(35)
Output
Output
M-i
*i pressure trace
Jffln
Output
<t> at £ -> 0
trap function

100
x/D
Fig. la Early part of piston motion. Solution of equations (5) for LID = 100,

60 80 100
x/D
Fig. lb Early part of piston motion. Solution of equations (5) for LID - 100,

0 (0
0.3 -
0.2 .
0.1 .
100
x/D
Fig. lc Early part of piston motion. Solution of equations (5) for LID = 100,

100
200
t.ao/D
Fig. 2a Early part of piston motion. Solution of equations (5) for LID - 100,

100
X
40 .
30 .
20
10 .
200
t.ao/D 250 300
Fig. 2b Early part of piston motion. Solution of equations (5) for LID = 100,

100
250 300
t.ao/D
Fig. 2c Early part of piston motion. Solution of equations (5) for LID = 100,

0.7
0.65 .
0.55 .
0.45 .
0.35
0.3
0.02
Fig. 3a Piston velocity at diaphragm rupture for LID = 100, £r = 1.667

0.5
0.1
0 02
Fig. 3b Piston velocity at diaphragm rupture for LID = 60, %r = 1

1.0
O-9
0-8
PA
O7
O-6
0-5
1r
0-2
1 1 1 1 r
. I I I I l I I
O4 O-6 1-0
Fig. 4 Pressure on the rear face of piston stopped instantaneously from a speed ur
to which it has been accelerated from rest adjacent to a gas at pressure pAo,
speed of sound a0, yA = 7/5 (see equation 12)

Nut
Fig. 5 Example of the arrangement of the right hand end of the compression tube.
Definition of D, D lt x i, G.

Fig. 6 Method of determining xc from the pressure trace after diaphragm rupture.
Rupture pressure = 0.9 x maximum pressure. In this case tc = tCmu.

r- tv
Fig. 7 Two other examples of determining»

Fig. 8a Best value of xc, obtained by adjusting b$ as a function of b\ and b2. A
defines the design point discussed in the text and B lies in the best off-
design direction at a pressure 1.8 times higher than that of A. LID - 100,
%r = 1.667.
0.3
Fig. 9a Piston velocity at diaphragm rupture for LID = 100,
best off-design direction in the urlao - b\ plane.
= 1.667. Showing

Fig. 8b Best value of %c, obtained by adjusting b$ as a function of b\ and b2. A
defines the design point discussed in the text and B lies in the best off-
design direction at a pressure 1.8 times higher than that of A. LID = 60,
Fig. 9b Piston velocity at diaphragm rupture for LID - 60,
off-design direction in the ur/a0 - b \ plane.
= 1. Showing best

7TO2
Fig. 8c. Best value of tc, obtained by adjusting b5 as a function of b\ and b2. A
defines the design point discussed in the text and B lies in the best off-
design direction at a pressure 1.8 times higher than that of A. LID = 40,
$r = 0.667.
0.5
0.43 .
Fig. 9c Piston velocity at diaphragm rupture for LID = 40, £r = 0.667. Showing
best off-design direction in the urlao - b\ plane.

T
0702
Fig. 10a Constant pressure time for fixed value of shock tube diameter. At points
further to the left than C, the piston mass gets excessive. LID = 100,
%r = 1.667.

0702
Fig. 10b Constant pressure time for fixed value of shock tube diameter. At values of
b 2 smaller than 8.4 it becomes impossible to catch the piston gently.
LID =604 = 1-

0.02
Fig. 10c Constant pressure time for fixed value of shock tube diameter. At values of
b 2 smaller than 4 it becomes impossible to catch the piston gently.
LID =40,^r =0.667.

cmax
O 100
L/D
Fig. 11 Approximate behavior of the optimum constant pressure time in the driver
gas with LID for volumetric compression ratio 60. Dotted curve: constant
shock tube diameter (see Figs. 10). Full curve: b$ adjusted for maximum
value of xc.

0.2
r- r.
Fig. 12a Best values of the parameters of the trap showing pressure history and
piston path for the design point A in Fig. 8a. 0.22 > 68 > 0.14. Note that
the trap engages only after x - xr > %Cmn, which is 2.2 at this condition.

r - rr
Fig. 12b The operation of the trap at the off-design point B in Fig. 8a, retaining the
same trap parameters as for the design point. (0.14 < fc8 < 0.22)