
THE NEW RTCM 3.1 TRANSFORMATION MESSAGESgeozilla.de/files/GEOSIBERIA_2008_RTCM_JAEGER.pdf ·...
31
GEOSIBERIA 2008 GEOSIBERIA 2008 Novosibirsk, 22. Novosibirsk, 22. - - 24.04.2008 24.04.2008 - - 4 4 th th Int. Int. Exhibition Exhibition and and Scientific Scientific Congress Congress devoted devoted to 75 to 75 th th Anniversary Anniversary of SSGA of SSGA - - THE NEW RTCM 3.1 TRANSFORMATION MESSAGES THE NEW RTCM 3.1 TRANSFORMATION MESSAGES Declaration, Generation from Reference Transformations and Implementation as a Server-Client-Concept for GNSS Services Prof. Dr. Reiner Jäger Prof. Dr. Reiner Jäger 1), 2) 1), 2) and Dipl. and Dipl. - - Ing. (FH) Simone Kälber Ing. (FH) Simone Kälber 3) 3) 1) Faculty of Geomatics, Hochschule Karlsruhe - Technik und Wirtschaft (HSKA) University of Applied Sciences, Moltkestrasse 30, D-76133 Karlsruhe, Germany 2) 2) Member of RTCM Working Group Transformation Messages 2004 Member of RTCM Working Group Transformation Messages 2004 - - 2007 2007 Member of FIG WG 5.4 GNSS-Networks EMail: [email protected] 3) EMail: [email protected] URL URL: www.dfhbf.de www.dfhbf.de ; www.geozilla.de www.geozilla.de
Transcript of THE NEW RTCM 3.1 TRANSFORMATION MESSAGESgeozilla.de/files/GEOSIBERIA_2008_RTCM_JAEGER.pdf ·...

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
THE NEW RTCM 3.1 TRANSFORMATION MESSAGESTHE NEW RTCM 3.1 TRANSFORMATION MESSAGESDeclaration, Generation from Reference Transformati ons and Implementation as a Server-Client-Concept for GNSS Services
Prof. Dr. Reiner Jäger Prof. Dr. Reiner Jäger 1), 2)1), 2) and Dipl.and Dipl. --Ing. (FH) Simone Kälber Ing. (FH) Simone Kälber 3)3)
1)Faculty of Geomatics, Hochschule Karlsruhe - Technik und Wirtschaft (HSKA)
University of Applied Sciences, Moltkestrasse 30, D- 76133 Karlsruhe, Germany
2)2) Member of RTCM Working Group Transformation Message s 2004 Member of RTCM Working Group Transformation Message s 2004 -- 20072007
Member of FIG WG 5.4 GNSS-Networks
EMail: [email protected] 3) EMail: [email protected]
URLURL: www.dfhbf.dewww.dfhbf.de ; www.geozilla.dewww.geozilla.de
GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
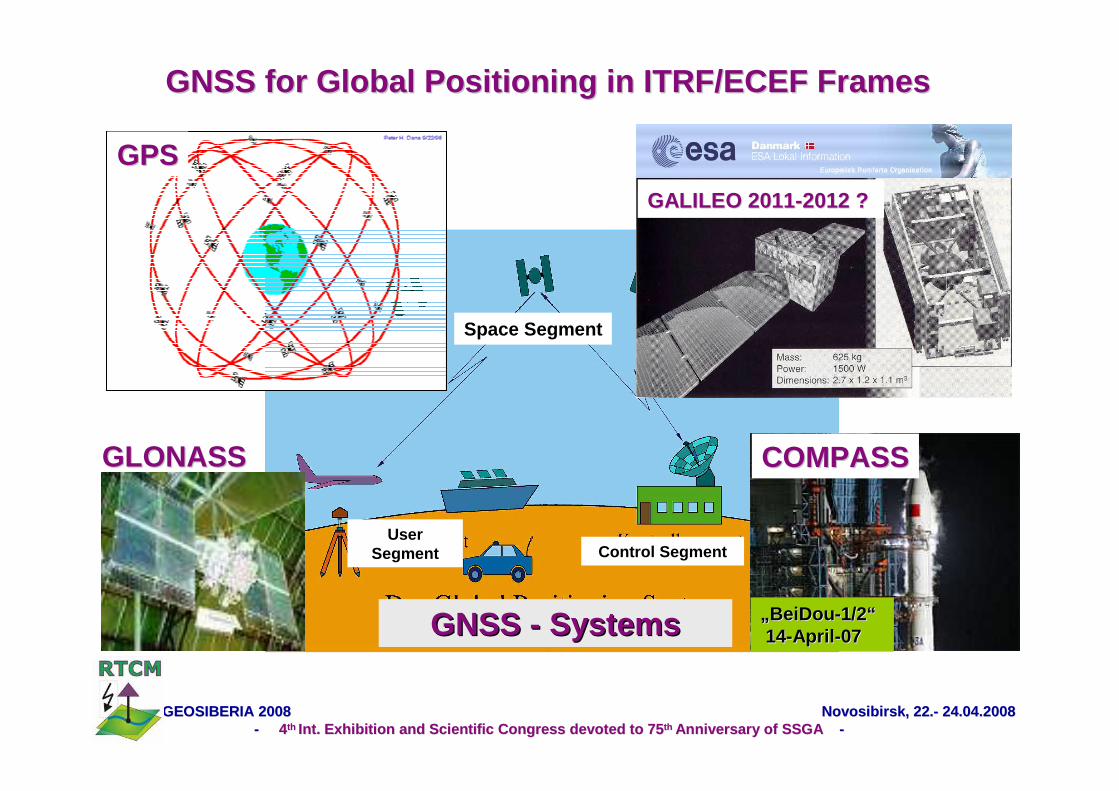
GNSS GNSS -- SystemsSystems
GNSS GNSS forfor Global Global PositioningPositioning in ITRF/ECEF in ITRF/ECEF FramesFrames
GPSGPS
GALILEO 2011GALILEO 2011 --2012 ?2012 ?
GLONASSGLONASS COMPASSCOMPASS
„„ BeiDouBeiDou --1/2“ 1/2“ 1414--AprilApril --07 07
Space Segment
User Segment Control Segment

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
ITRF/ECEF ITRF/ECEF -- Datum <= International GNSS Service (IGS)Datum <= International GNSS Service (IGS)
„„ MonthlyMonthly CoordinateCoordinate Files“ Files“ ETRS89 =: ITRF1989ETRS89 =: ITRF1989_01_01--19891989
<_1_cm <_1_cm ConsistencyConsistency !!
GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
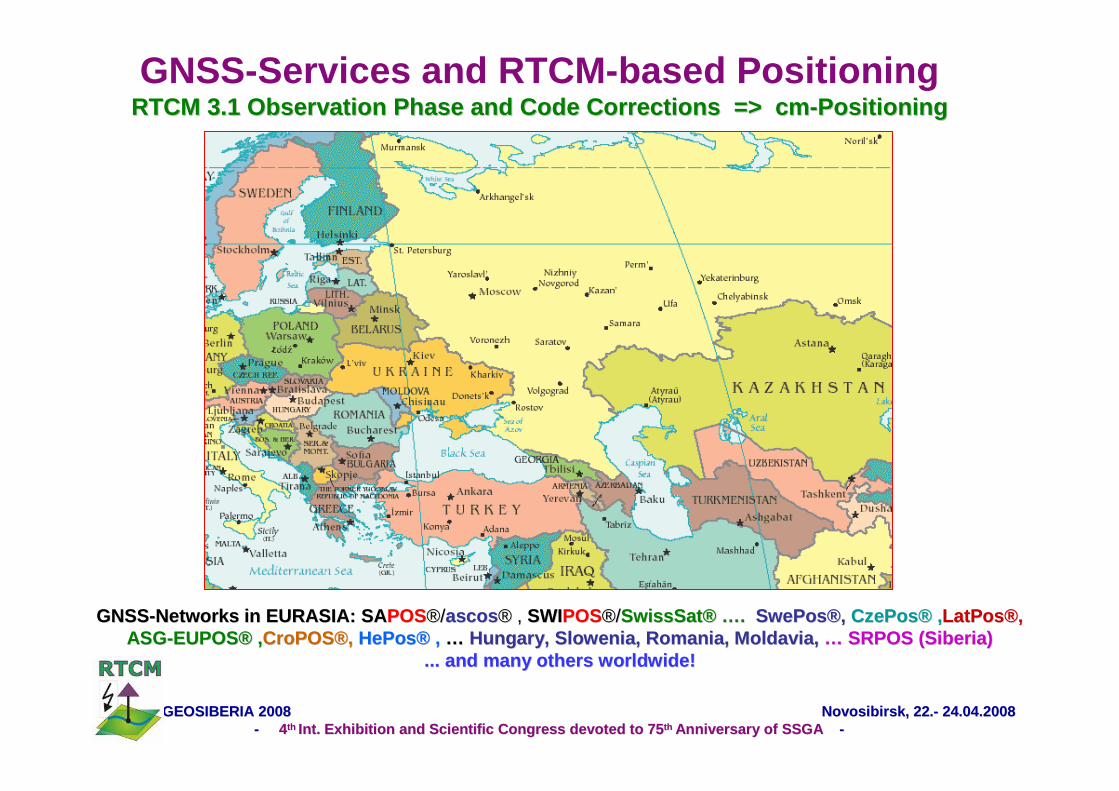
GNSSGNSS--NetworksNetworks in EURASIA: SAin EURASIA: SA POSPOS®/®/ascosascos ® , ® , SWISWIPOSPOS®/®/SwissSatSwissSat ® …. ® …. SwePosSwePos ®, ®, CzePosCzePos ® ,® ,LatPosLatPos ®, ®, ASGASG--EUPOS® ,EUPOS® ,CroPOSCroPOS ®, ®, HePosHePos ® , ® , … … HungaryHungary ,, SloweniaSlowenia , , RomaniaRomania , , MoldaviaMoldavia , , … SRPOS (… SRPOS (SiberiaSiberia ) )
... and ... and manymany othersothers worldwideworldwide !!
GNSS-Services and RTCM-based PositioningRTCM 3.1 Observation Phase and Code RTCM 3.1 Observation Phase and Code CorrectionsCorrections => => cmcm --PositioningPositioning
„„ ITRFITRF--relatedrelated ““e.ge.g. ETRF89. ETRF89

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
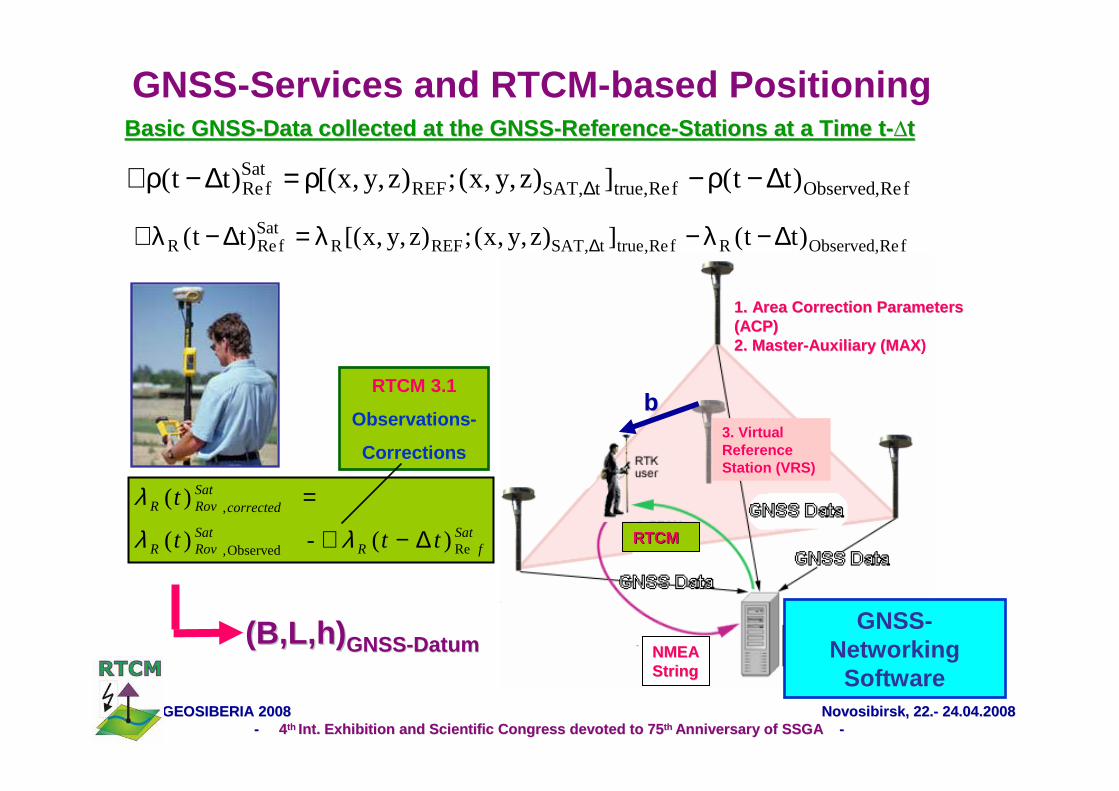
GNSS-Services and RTCM-based Positioning

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
GNSSGNSS--ServiceService –– NetworkNetwork of of ReferenceReference StationsStations+ + GNSSGNSS--NetworkingNetworking Software Software
GNSS-Services and RTCM-based Positioning
GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
1. 1. AreaArea CorrectionCorrection Parameters Parameters (ACP)(ACP)2. 2. MasterMaster --AuxiliaryAuxiliary (MAX(MAX)
fRe,ObservedfRe,truet,SATREFSat
fRe )tt(])z,y,x(;)z,y,x[()tt( ∆−ρ−ρ=∆−ρ∇ ∆
fRe,ObservedRfRe,truet,SATREFRSat
fReR )tt(])z,y,x(;)z,y,x[()tt( ∆−λ−λ=∆−λ∇ ∆
Basic Basic GNSSGNSS--DataData collectedcollected at at thethe GNSSGNSS--ReferenceReference --StationsStations at a Time at a Time tt--∆t∆t
GNSS-Networking
Software
SatfR
SatRovR
correctedSatRovR
ttt
t
ReObserved,
,
)( - )(
)(
∆−∇
=
λλ
λ
RTCM 3.1
Observations-
Corrections
((B,L,h)B,L,h) GNSSGNSS--DatumDatum
bb
RTCMRTCM
NMEANMEAStringString
3. VirtualReferenceStation (VRS)
GNSS-Services and RTCM-based Positioning

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Many Commercial Hard- and Software with NTRIP-embedding see
http://igs.ifag.de/index_ntrip.htm
Trend at Trend at manymany newnew servicesservicese.ge.g. in. in
PolandPolandSloveniaSlovenia
(TCP/(TCP/IPIP--basedbased , , e.ge.g. via. viaInternet, GPRS Internet, GPRS –– NTRIP)NTRIP)
GNSS-Services and RTCM-based Positioning

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
ITRF / ETRF89 - Datum Old Classical Systems
Transformation Problems and Transformation Problems and ReferenceReference TransformationsTransformations1.) Horizontal Datum 1.) Horizontal Datum TransitionTransition fromfrom (B,L) (B,L) GNSS,ITRF GNSS,ITRF
to to ClassicalClassical Datum (Datum ( B,L)B,L) ClassicalClassical
StrictStrict andandGeneralGeneralTRAFOTRAFO
((EnabledEnabled &&GNSSGNSS--practicepractice

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
1. Plane Problem - Karlsruhe Reference Transformation
3D 3D SimilaritySimilarity Transformation Transformation RelatedRelated to (to ( B,L,hB,L,h ))
[ ]
t
t
t
sMoldenski
v
v
v
)
h
L
B
h
L
B
h
L
B
(
z
y
x
z
y
x
i,)h,L,B(
ih
L
B
i
1)b,a(,)b,a(
)b,a(,)b,a(
)b,a(,)b,a(
2
1
21
21
21
∆εεε
⋅=
+
−
∆
∆
∆
−
⋅⋅⋅+⋅⋅⋅⋅⋅⋅⋅⋅−
⋅+⋅+−−
⋅++−⋅⋅⋅
⋅++−⋅⋅⋅
++⋅−
+⋅−
+⋅⋅⋅−
++⋅⋅
++⋅⋅−
)Bsin()Lsin()Bcos()Lcos()Bcos(Wah0)Lcos()Bcos()Bsin(eN)Lsin()Bcos()Bsin(eN
0)Bcos()hN(
)Lcos(
)Bcos()hN(
)Lsin(01
)Bcos()hN(
)h)e1(N()Lsin()Bsin(
)Bcos()hN(
)h)e1(N()Lcos()Bsin(hM
)Bcos(
hM
)Lsin()Bsin(
hM
)Lcos()Bsin(
hM
eN)Bcos()Bsin(0
hM
hWa)Lcos(
hM
hWa)Lsin(
22
22
2
ReferenceReference --TransformationTransformation((DataData / Parameters / / Parameters / AlgorithmsAlgorithms ))
Source CRS Target CRS
(B,L,h) GNSS => (B,L)Classical(B,L,h) GNSS => (B,L,H)Classical

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
1. Plane Problem - Karlsruhe Reference Transformation
DFLBF_DBTransformationParameters & Residuals
ReferenceReference --TransformationTransformation((DataData / Parameters / / Parameters / AlgorithmsAlgorithms ))
Source CRS Target CRS
(B,L,h) GNSS => (B,L)Classical(B,L,h) GNSS => (B,L,H)Classical

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
H = h - N(B,L,h)
GNSS Heighting„H from h- GNSS“
HRSHRShh
HH
hhNN
GeoidGeoid (HBF)(HBF)EllipsoidEllipsoid
+/+/-- 70 m70 m
2. Height Problem / HRS Transition - Karlsruhe Referen ce Transformation
ReferenceReference --TransformationTransformationSource CRS Target CRS(B,L,h) GNSS => N

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
hGNSS+ v = H + fT ⋅ p - hGPS·∆∆∆∆ m
H + v = H
NG‘ j + v j = fT ⋅ p + ∂NG(d j)
ξj + v = - fBT / M(B) ⋅ p + ∂ ξ (dξξξξ,ηηηη) j
ηηηη j + v = - fLT/(N(B)⋅cos(B)) ⋅ p + ∂ η(dξξξξ,ηηηη) j
)(4 ∫∫σγ⋅π⋅ B
a ∆∆∆∆g·S(ψ)dσ + v = NFEM(p)= fT ⋅ p
)(dg )'(cosP)'msin'S'mcos'C(r
)1)k(n(
r
avg
0k
k
0mm),k(nm),k(nm)),k(n
1)k(n
rLGVgrav d+∑ ∑ θ⋅λ⋅+λ⋅+
=+∞
= =
+
NFEM(p)N(pk)
∑ ∑ ∂+−θ⋅λ⋅+λ⋅
γ=
∂+=+
∞
= =
+
0k
k
0m
jm),k(nm),k(nm),k(n
1)k(n
Q
jm),k(nm),k(n
jGPM
)(N)Vref)'(cosP)'msin'S'mcos'C(r
a(
1
)(N)S,C(NvN
d
d
)hm()'S,'C(Nv0 Tm),k(nm),k(nN ⋅∆+⋅−=+ ∆ pf
2. Height Problem / HRS Transition - Karlsruhe Referen ce Transformation
ReferenceReference --TransformationTransformationSource CRS Target CRS(B,L,h) GNSS => N
DBDB

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
OfficialOfficialState State
DatabasesDatabases
e.ge.g..
in Germanin GermanCountriesCountries
......DFHBF-DB
2. Height Problem / HRS Transition - Karlsruhe Referen ce Transformation
ReferenceReference --TransformationTransformationSource CRS Target CRS(B,L,h) GNSS => N
GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
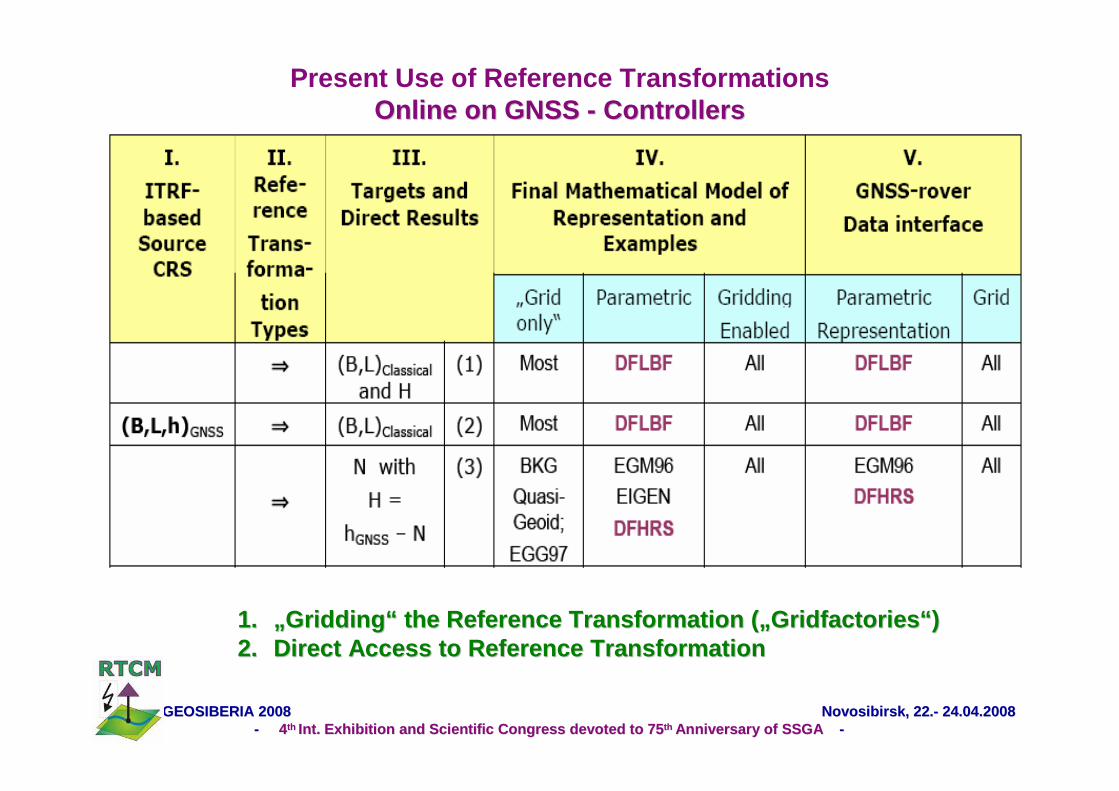
Present Use of Reference TransformationsOnline on GNSS Online on GNSS -- ControllersControllers
1.1. „„ GriddingGridding “ “ thethe ReferenceReference Transformation („Transformation („ GridfactoriesGridfactories “)“)2.2. DirectDirect Access to Access to ReferenceReference TransformationTransformation

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
DFLBF / DFHBF
Present Use of Reference Transformations on GNSS - Controllers

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Present Use of Reference Transformations on GNSS - Controllers

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
DFLBF / DFHBFDFLBF / DFHBF
Present Use of Reference Transformations on GNSS - Controllers

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
RTCM 3.1I.) RTCM 3.1 Observations Corrections
&II.) 7 RTCM Transformation Messages
(International RTCM Working Group 2004 – 2007)
• Transformation-Parameters (1021 ,1022)• Residual-Grids and/or Geoid-Representations (1023 ,1024)
• Projection-Information (1025 ,1026,1027)
sent by GNSS-Positioning-Service
to GNSS-Positioning-User
NMEANMEA--basedbased requestrequest to to RTCMRTCM--TransformationTransformation MessagesMessages ServerServer

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Gridding of Reference Transformations
PPi i [([(B,L,h)B,L,h)GNSSGNSS ]]
Virtual Fitting Points P i
Source CRS - Grid
Reference
Transformations
PPi i [([(B,L)B,L)ClassClass ]]
Virtual Fitting Points P i
Target CRS - Grid
PPi i [([(B,L,H)B,L,H)ClassClass ]]
PPi i [N[N ]] PPi i [H=[H=hhGNSSGNSS -- NN ]]
+
⋅⋅=
+
z
x
x
i,GNSS/Sourceiz
y
x
i,etargTT
T
T
t
t
t
z
y
x
s
r
r
r
z
y
x
R
Gridding
1.]
2.]
7 ParameterTrafo
Geoid/HRSGrid
7 Parameters7 Parameters3 Residual 3 Residual GridGrid
GridGrid of Nof N ii

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Area of validity for 7P transformation (origin and extension) + 16 Grid-Points
RCTM 3.1 Transformation Messages – Defintion and Examp les
GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
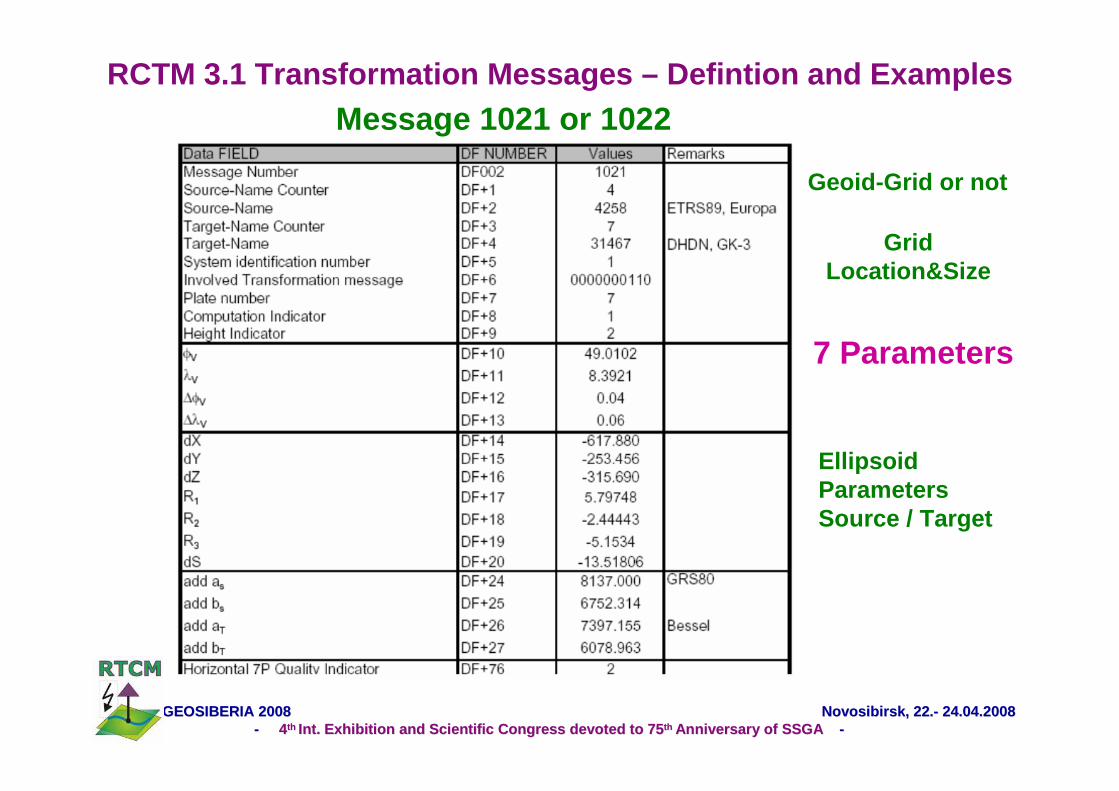
RCTM 3.1 Transformation Messages – Defintion and Examp lesMessage 1021 or 1022
GridLocation&Size
7 Parameters
Ellipsoid ParametersSource / Target
Geoid-Grid or not

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
MessageMessage 10231023 Message 1024or
Height Indicator = 1 „dh i„ = Physical Heights‘ Residuals dH i
Height Indicator = 2 „dh i„ = Geoid / HRS Heights N i (dN i)
Residuals P 14
Residuals P 15
Residuals P 16
:: ::
RCTM 3.1 Transformation Messages – Defintion and Examp les

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
UsingReference
Transformations
to compute
a country-wide
1.)„STATIC
GRID“(„Large Residuals“ Grid)
RCTM 3.1 Transformation Messages – Message Generation

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Using Reference Transformations to compute country-widegrids dynamically online on NMEA-request by virtual fitting points
RCTM 3.1 Transformation Messages – Message Generation
1.) No preceeding „Gridding“ Discretization Error2.) Small Residuals - Small Interpolation error3.) De facto - De facto independe nce of the residual
interpolation method in the rover
2.)„Dynamic
Grid“
Advantages

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Using Reference Tranformations to compute grids dynamica lly„Dynamic Grid“
RCTM 3.1 Transformation Messages – Message Generation
4.) Direct use of Original Reference Transformations
ϑ⋅λ+λ⋅+⋅=λϑ ∑ ∑
∞
= =)(cosP)msinSmcosC()
r
a(1(
r
GM),,r(W nmnmnm
n
2n
n
0m
80GRS
NhGNSS
UW))z,y,x((N
−γ−=
))u,,ß(|)M,,,a(UU REF λωε=
β⋅λ⋅β⋅ε+⋅
λ⋅⋅ε+⋅
=
sinu
sincosu1u
cosßcosu1u
z
y
x22
i
22i

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Using Reference Tranformations to compute grids dynamica lly„Dynamic Grid“
RCTM 3.1 Transformation Messages – Message Generation
5.) „Combined Messages Generation“ in case of ITRF-Ope ration Mode
GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
Using Reference Tranformations to compute grids dynamica lly„Dynamic Grid“
RCTM 3.1 Transformation Messages – Message Generation
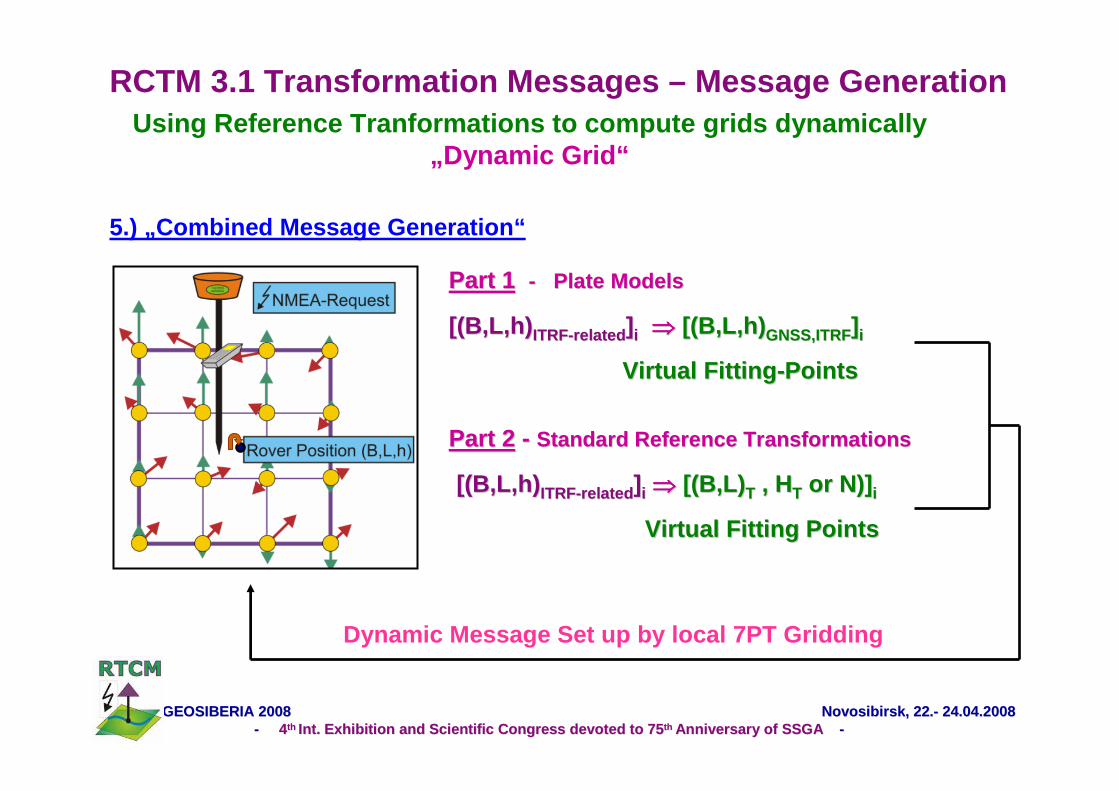
5.) „Combined Message Generation“
[([(B,L,h)B,L,h) ITRFITRF--relatedrelated ]] ii ⇒⇒⇒⇒⇒⇒⇒⇒ [(B,L)[(B,L) TT , H, HTT or or N)]N)] ii
[([(B,L,h)B,L,h) ITRFITRF--relatedrelated ]] ii ⇒⇒⇒⇒⇒⇒⇒⇒ [[ ((B,L,h)B,L,h) GNSS,ITRFGNSS,ITRF]] ii
Part 1Part 1 -- PlatePlate ModelsModels
Part 2Part 2 -- Standard Standard ReferenceReference TransformationsTransformations
VirtualVirtual FittingFitting --PointsPoints
VirtualVirtual Fitting Fitting PointsPoints
Dynamic Message Set up by local 7PT Gridding

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
RCTM 3.1 TransformationMessages
General General ConfigurableConfigurableRTCM TransformationRTCM Transformation
MessagesMessages ServerServer
All kind of ReferenceTransformations
in so calledTransformationTransformation
ModulesModules
Dynamic & Combined& Static RCTM-Messages
______________________
CommuicationDesign
in case of passingRTCM Transformation
Messagesthrough GNSS-Networking
Software

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
RCTM 3.1 Transformation Messages – „Full Service“ GNSS-Transformation Services

GEOSIBERIA 2008GEOSIBERIA 2008 Novosibirsk, 22.Novosibirsk, 22. -- 24.04.200824.04.2008-- 44th th Int. Int. ExhibitionExhibition and and ScientificScientific Congress Congress devoteddevoted to 75to 75 th th AnniversaryAnniversary of SSGA of SSGA --
RCTM 3.1 Transformation Messages – GZTra-Server and GZTra-Client
Reference TransformationsDFHBF Florida
DFHBF BavariaDFLBF Bavaria
www.geozilla.de


















