The Magnetic field of the Earth and Planets
23
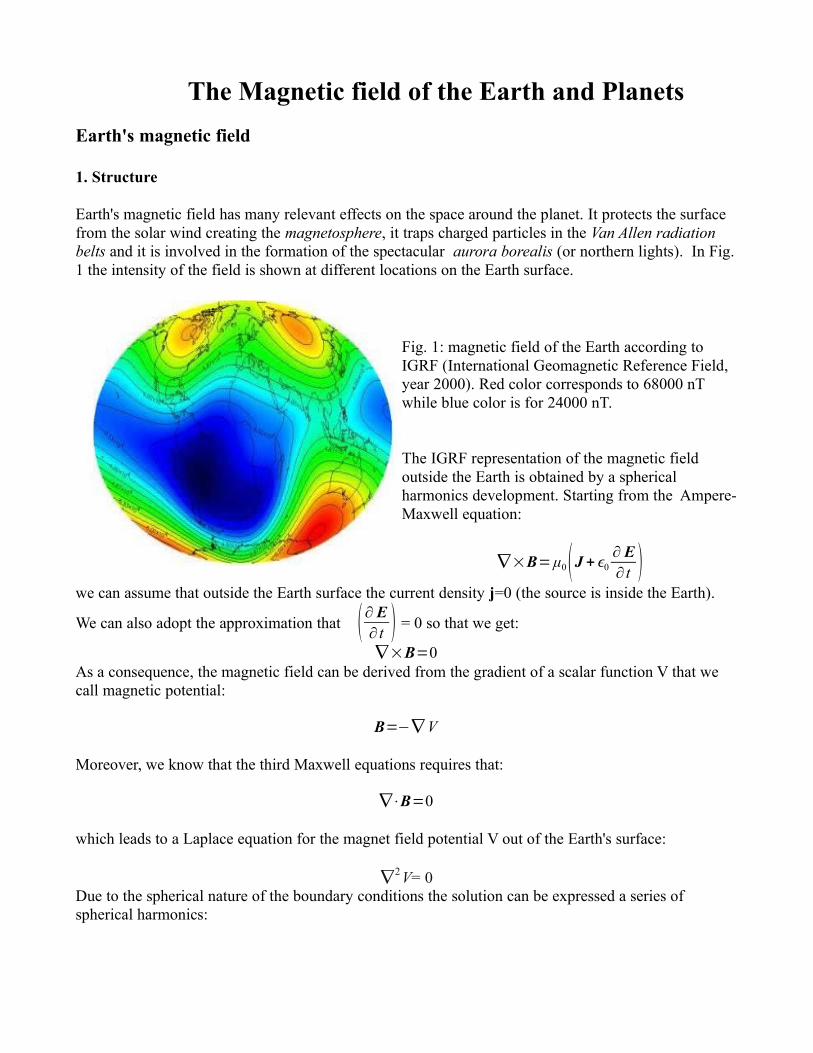
The Magnetic field of the Earth and Planets Earth's magnetic field 1. Structure Earth's magnetic field has many relevant effects on the space around the planet. It protects the surface from the solar wind creating the magnetosphere, it traps charged particles in the Van Allen radiation belts and it is involved in the formation of the spectacular aurora borealis (or northern lights). In Fig. 1 the intensity of the field is shown at different locations on the Earth surface. Fig. 1: magnetic field of the Earth according to IGRF (International Geomagnetic Reference Field, year 2000). Red color corresponds to 68000 nT while blue color is for 24000 nT. The IGRF representation of the magnetic field outside the Earth is obtained by a spherical harmonics development. Starting from the Ampere- Maxwell equation: ∇× B = μ 0 ( J + ϵ 0 ∂ E ∂ t ) we can assume that outside the Earth surface the current density j=0 (the source is inside the Earth). We can also adopt the approximation that ( ∂ E ∂ t ) = 0 so that we get: ∇× B =0 As a consequence, the magnetic field can be derived from the gradient of a scalar function V that we call magnetic potential: B =− ∇ V Moreover, we know that the third Maxwell equations requires that: ∇⋅ B =0 which leads to a Laplace equation for the magnet field potential V out of the Earth's surface: ∇ 2 V= 0 Due to the spherical nature of the boundary conditions the solution can be expressed a series of spherical harmonics:
Transcript of The Magnetic field of the Earth and Planets
The Magnetic field of the Earth and Planets
Earth's magnetic field
1. Structure
Earth's magnetic field has many relevant effects on the space around the planet. It protects the surface from the solar wind creating the magnetosphere, it traps charged particles in the Van Allen radiation belts and it is involved in the formation of the spectacular aurora borealis (or northern lights). In Fig.1 the intensity of the field is shown at different locations on the Earth surface.
Fig. 1: magnetic field of the Earth according to IGRF (International Geomagnetic Reference Field, year 2000). Red color corresponds to 68000 nT while blue color is for 24000 nT.
The IGRF representation of the magnetic field outside the Earth is obtained by a spherical harmonics development. Starting from the Ampere-Maxwell equation:
∇×B=μ0(J +ϵ0
∂ E∂ t )
we can assume that outside the Earth surface the current density j=0 (the source is inside the Earth).
We can also adopt the approximation that (∂E∂ t ) = 0 so that we get:
∇×B=0As a consequence, the magnetic field can be derived from the gradient of a scalar function V that we call magnetic potential:
B=−∇V
Moreover, we know that the third Maxwell equations requires that:
∇⋅B=0
which leads to a Laplace equation for the magnet field potential V out of the Earth's surface:
∇2V= 0
Due to the spherical nature of the boundary conditions the solution can be expressed a series of spherical harmonics:

V r,θ,φ=a∑n=1
k
ar
n+ 1
∑m= 0
n
g nm cosmφ+hm
n sin mφ Pnmθ
where a is the average Earth's radius (for the International Geomagnetic Reference Field (IGRF) a=6371,2 km); g n
m e hnm are the Gauss' coefficients and r, θ , φ are the radial distance, co-latitude
(complementary angle of the latitude) and longitude measured from Greenwich towards east, respectively. The Pn
m are the Legendre functions. The Gauss' coefficients are given by IGRF and are computed with least squares interpolation of measured data on the magnetic field. The components of the magnetic field are given by:
Br=−∂V∂ r
Br=−1r∂V∂
B=−
1rsin
∂V∂
2. Source
What is the source of the magnetic field? To answer this question we have to explore the interior of theEarth. Earthquakes and the difference in the propagation of seismic waves which depends on the composition of the crossed material, have lead to the following model of Earth's interior:
Fig. 2: different propagation paths of seismic waves on the interior of the Earth. Reflection and refraction phenomena.
The Earth is divided in the lithosphere (crust and uppermost mantle), the mantle, an outer liquid core and an inner solid core.

Fig.3: Earth's structure.
The inner core is solid and it is believed to be madeof a nickel-iron
alloy (Ni about 5-10 wt%) with very small amounts of some lighter elements. It is the outcome of the Earth differentiation with the heavier elements sinking towards the center of the planet after its formation. It is unattached to the mantle, suspended in the molten outer core and, in spite of its high temperature (5000-6000 C), it is believed to have solified as a result of pressure-freezing which occursto most liquids under extreme pressure.
Fig. 4. Typical pressure-temperature diagram for a solid (the dotted line shows the anomalous behaviorof water). Increasing the pressure leads to crystallization at higher temperatures. On the left, the phase diagram for a Fe-10wt%Ni alloy from Lin et al., Geophysical Research Letters 29, 1471, 2002.
The inner core has a density of about 15 g/cm3 .
The outer core has a composition similar to the inner core with about 10% of sulphur, oxygen and other light elements. The temperature is 4000-5000 C and the density is between 10 and 12 g/cm3. Since the pressure is lower and it is hot, the outer core is liquid. Over geologic time, the inner core grows at the expense of the outer core as the whole Earth cools. The pressure is the same but the temperature drops and the pressure-freezing radius extends farther out. In the outer core the liquid

metal is electrically conducting. This conductive layer combines with Earth's rotation to create a dynamo effect that maintains a system of electrical currents that creates the Earth's magnetic field.In conclusion, the Earth's magnetism is due to a combination of rotation and molten metallic core.
Classical dynamo configuration: an initial magnetic field coupled to the rotation of disk generates a self-sustaining magnetic field.
Considering the melted core as a fluid, the MHD equation describing its evolution is:
DuD t
=1ρ ∇ p+ν∇ 2u+ρg+2Ω×u+Ω×Ω×r+
1ρ J×B
the second term on the right includes the viscous term ν∇2u , Coriolis’ term 2Ω×u and
Lorentz’s term 1ρ J×B . The combination of convective motion, due to the temperature gradient,
and Coriolis’ force generates spiral motions creating the magnetic field. The rotation of the core (Coriolis force) is then a crucial ingredient for the generation of B.
Planetary rotations and magnetic fields.
The rotation rate of a planet and the presence of a molten core are fundamental requirements for the presence of a magnetic field. Here below we list the planets of the solar system and the parameters related to rotation and dipole axis inclination. The angle ε is the obliquity, the inclination of the rotation axis of the planet respect to the orbital plane, the angle α is instead the angle between the magnetic field axis (in dipole approximation) and the planet rotation axis. The rotation period is given in days for the terrestrial planets and hours for the outer planets while the magnetic moment is given asmultiple of the magnetic moment of the Earth. For Venus the absence of a magnetic field must be attributed to its slow rotation while for Mars it is due to the absence of a molten core. For the outer planets the magnetic field has a more complex source and for Jupiter and Saturn may be related to the formation of metallic hydrogen close to the planet core.

a (deg) e (deg) P (days) MB (in Earth's units)
Mercury 10 0 58.6 4 10-4
Venus 0 177 -243 0Earth 10.8 23.5 1 1Mars 0 25.9 1 0Jupiter 9.6 3.12 9.9 (hrs) 2 104
Saturn < 1 26.75 10.7 (hrs) 600Uranus 60 97.86 -17.2 (hrs) 50Neptune 47 29.5 16.1 (hrs) 25
4 Dipole approximation
The Earth's magnetic field is due by 97-99% to electric currents in the nucleus, 1-2% to magnetized rocks in the crust, and 1-2% to electric currents around the Earth. It has a strongly dipole-dominated structure (up to 90% of the field strength) with the magnetic south close to the geographic north (see figure).

The magnetic field of the Earth inverts its polarization approximately every 250000 years, even if the periodicity is not well defined. We know of the field reversal because of the different magnetization of ferromagnetic rocks of different ages (paleomagnetism).
Fig. 5. Timing of magnetic reversals from
magnetized rocks. Dark areas denote periods where the polarity matches today's polarity, light areas denote periods where that polarity is reversed.
The magma flows out of the crust at a temperature higher than the Curie temperature and then it is not magnetized since all dipoles are randomly oriented because of the thermal agitation. When it cools down, the dipoles orient along the current magnetic field and the rock is magnetized accordingly. The different magnetization of rocks at different depths preserve the record of field reversals.
Glatzmaier-Roberts numerically solved the magneto-hydrodynamics equations (MHD) to model the magnetic field generation in a fluid outer core surrounding a solid inner core (Glatzmaier and Roberts,Phys. Earth Planet. Inter., 91, 63-75, 1995). They were also able to reproduce the dipole field reversal and they find that the intensity of the magnetic dipole moment decreases by about a factor of ten

during the reversal and recovered immediately after, similar to what is seen in the Earth's paleomagnetic reversal record. On the basis of their model they explain how convection in the fluid outer core is continually trying to reverse the field but that the solid inner core inhibits magnetic reversals because the field in the inner core can only change on the much longer time scale of diffusion. Only once in many attempts is a reversal successful, which is probably the reason why the times between reversals of the Earth's field are long and randomly distributed (Glatzmaier and Roberts, Nature, 377, 203-209, 1995).
Fig. 6: 3D magnetic field structure simulated with the Glatzmaier-Roberts (1995) geodynamo model. Magnetic field lines are blue where the field is directed inward (North) and yellow where directed outward (South). The rotation axis of the model Earth is vertical and through the center. The field linesare drawn out to two Earth radii.
4. Magnetic dipole
The equations for a 3D magnetic dipole are:
Br=2μ0 m
4 π r3 cosθ
Br=−μ0 m
4π r3 sinθ
Bϕ=0
where m is the magnetic moment that, for a coilof area As with a current i, is defined as:
m=As⋅i
When dealing with the Earth's magnetic field, usually the co-latitude θ is substituted by the latitude andthe direction of the dipole moment is directed downwards. As a consequence, the formula for a dipolar
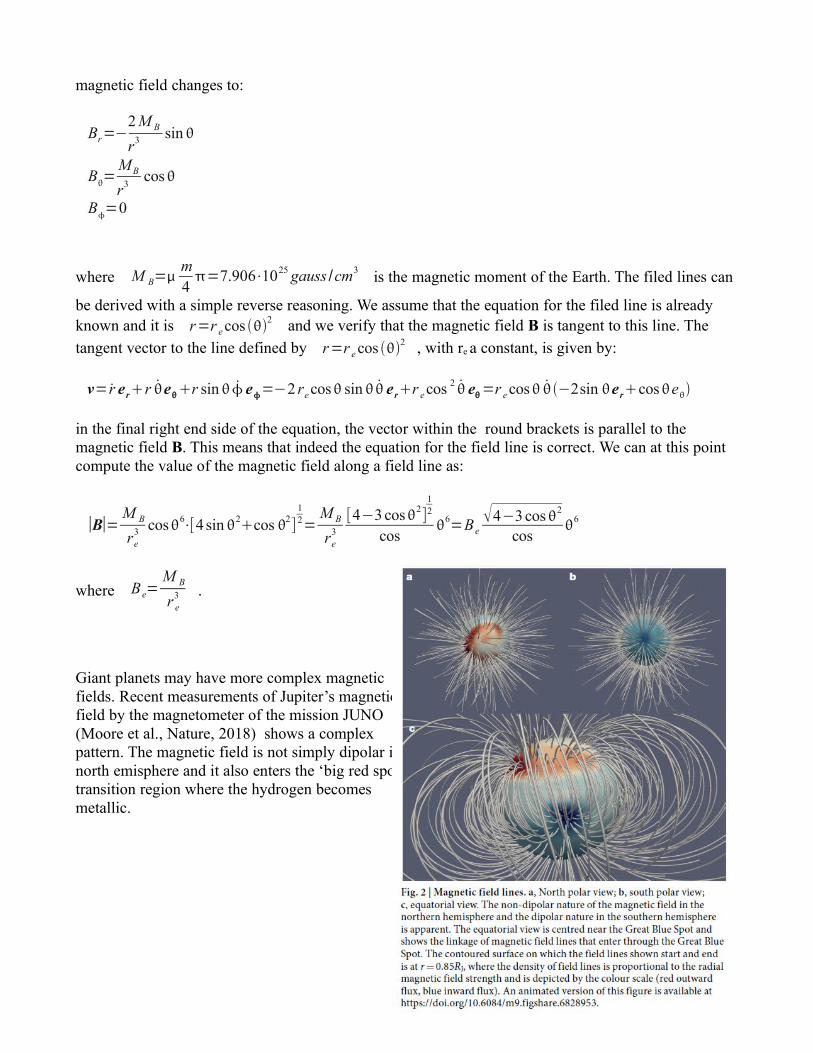
magnetic field changes to:
Br=−2M B
r3 sin
B=
M B
r3cos
B=0
where M B=m4=7.906⋅1025 gauss /cm3
is the magnetic moment of the Earth. The filed lines can
be derived with a simple reverse reasoning. We assume that the equation for the filed line is already known and it is r=r e cos 2 and we verify that the magnetic field B is tangent to this line. The
tangent vector to the line defined by r=r e cos 2 , with re a constant, is given by:
v= r err er sin e=−2 re cos sin err e cos 2 e=r e cos −2sin ercose
in the final right end side of the equation, the vector within the round brackets is parallel to the magnetic field B. This means that indeed the equation for the field line is correct. We can at this point compute the value of the magnetic field along a field line as:
∣B∣=M B
re3 cos6
⋅[4sin2cos 2
]
12=
M B
re3
[4−3 cos2]
12
cos
6=Be
4−3cos2
cos
6
where B e=M B
r e3 .
Giant planets may have more complex magnetic fields. Recent measurements of Jupiter’s magnetic field by the magnetometer of the mission JUNO (Moore et al., Nature, 2018) shows a complex pattern. The magnetic field is not simply dipolar in the north emisphere and it also enters the ‘big red spot’ . The origin of this structure is suspected to the the transition region where the hydrogen becomes metallic.

Motion of charged particles in the magnetic field of the Earth
Unperturbed motion: gyromagnetic (locally constant magnetic field)
Drift motion: gradient and curvature of themagnetic field, other external forces (electricfield, gravity)
Mirror motion: when the field lines thicken, the particles feel a repulsive force.
The motion of charged particles trapped in the magnetic field of the Earth is multi-periodical and it canbe studied with a perturbative approach. It can be divided in three different component: the gyromagnetic, drift and mirror motion. This separation is possible since the different types of motion have different timescales. The gyromagnetic motion can be considered as the unperturbed motion of particles occurring on a very short timescale, while the drift and the mirror motion are slow

perturbations of the gyromotion.
1. The gyromagnetic motion
The equation of motion of a charge particle q under the action of a constant magnetic field directed along the z-axis are derived from the Lorentz's equation of the force:
m v x=q v y Bm v y=q v x B where B=0,0, B and V= vx , v y , 0
to solve this equations we can derive the equation of motion once:
x=qBm
y=−qBm
2
x
y=qBm
x=−qBm
2
y
Integrating back these equations we get:
x=−c
2 x
y=−c2 y
They are the equations of uniform circular motion with frequency:
c=qBm
called cyclotron frequency. The centripetal acceleration and the radius are given by:
∣a∣=c2∣r∣=
v2
r and r c=
vc
=v mq B
where rc is the radius of the circular trajectory while v=v x2v y
2 is the modulus of the circular velocity perpendicular to the magnetic field direction. Ad example, electrons moving along the magnetic filed lines of the Earth have an average radius of 100 m, a period of the order of the μs and a velocity around 106 km/s.
2. The drift motion
The drift motion of charged particles in the Earth's magnetic field is due to the curvature and gradient of the field and, to a lower extent, to the presence of the gravity field and a weak electric field. We list here below the contributions to the drift motion:
1) If the magnetic field lines are curved then:
v D1=m v∥
2 B×n
Rc q B2
where v∥ is the component of the particle velocity parallel to the tangent of the local magnetic field line and R_c is the curvature radius of the field line.
2) If there is a non-zero field gradient, then:
v D2=12
mv ⊥
2 B×∇ B
q B2
The sign of both vD1 and vD2 depend on the charge q. As a consequence, protons and electrons drift towards different directions. Electrons drift towards west while protons towards east. On average,
v ⊥>v∥ ⇒ v D2>vD1 .
3) If there is an electric field E and a gravity field G there is a third drift velocity given by:
vD3=E×B
B2 m
q B2G×B
The dominant velocity component is vD1 which is proportional to v which is usually the larger velocity components of drifting charges.
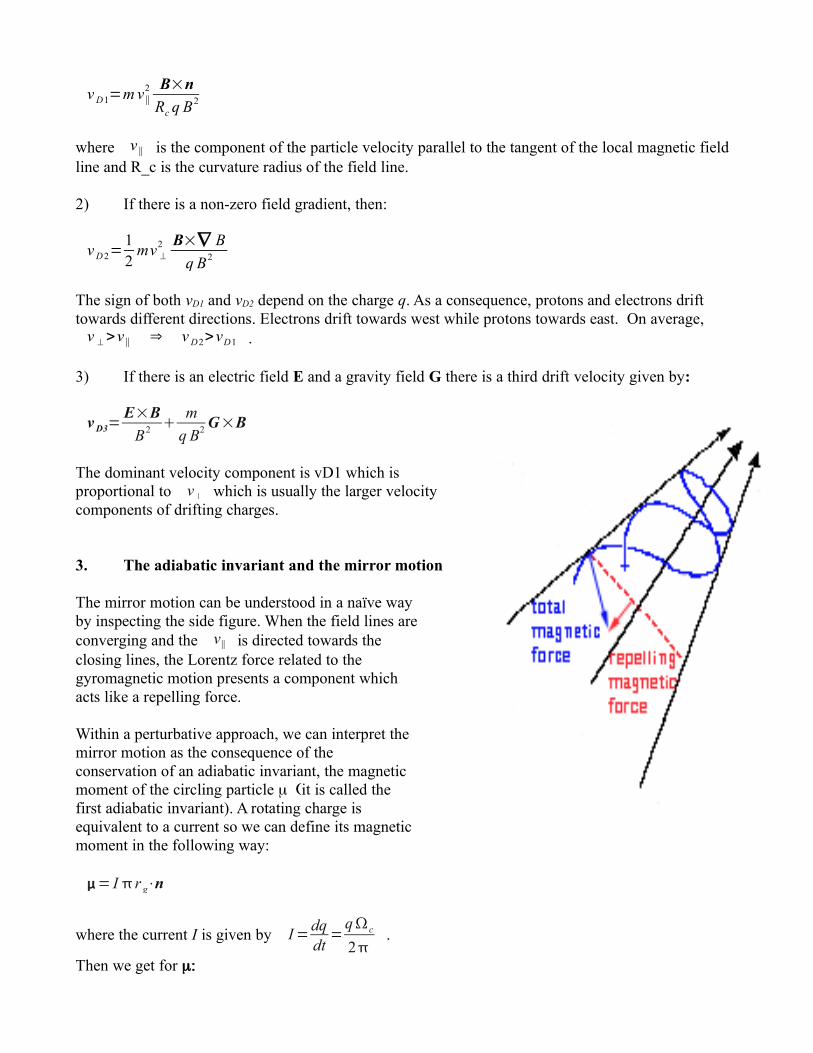
3. The adiabatic invariant and the mirror motion
The mirror motion can be understood in a naïve way by inspecting the side figure. When the field lines areconverging and the v∥ is directed towards the closing lines, the Lorentz force related to the gyromagnetic motion presents a component which acts like a repelling force.
Within a perturbative approach, we can interpret the mirror motion as the consequence of the conservation of an adiabatic invariant, the magnetic moment of the circling particle μ (it is called the first adiabatic invariant). A rotating charge is equivalent to a current so we can define its magnetic moment in the following way:
= I r g⋅n
where the current I is given by I=dqdt
=qc
2.
Then we get for μ:

=ec
2
v
2
c2=
12
mv
2
Bn
This is an adiabatic invariant and is conserved when the length scale of the variation of the magnetic field is significantly larger than the radius of the gyromagnetic motion. Then its invariance can be easily proved. Let's start from the variation of the perpendicular component of the particle velocity:
ddt
m v=q Ev×B
if we multiply both sides by v we get:
mv⋅d v
dt=
ddt
12
m v
2=qv⋅E
At this point we integrate the previous formula over one complete gyromagnetic period T=2c
to
get:
∫0
T ddt
12
m v
2dt=
12
m v
2=q∫0
Tv⋅E dt=q∮E⋅d l
We can apply Faradys' law and express the electric field as the variation of the magnetic field:
q∮ E⋅d l=−∫
∂B∂ t
ds
Here S is the area enclosed by a gyromagnetic orbit. Since we have assumed that the variation of B is small over a gyromagnetic radius, than we can approximate the integral on the right as:
−∫
∂B∂ t
ds=−qdBdt
⋅=qdBdt
rc2
Why the change in sign from the second to the third expression?When the line-integral is transformed into a surface integral by theFaradys' law, a convention on the direction of the line integral (anti-clockwise) is adopted (see side figure). However, the line integral iscomputed along the gyromagnetic motion with is clockwise (forpositive charges, than the q changes sign). As a consequence, wehave to assume that the normal n points along -z or, in altenrative,that the area is negative. At this point we can substitute thepreviously computed expression for rc to get:
If the magnetic field changes smoothly on time because of the
motion of the particle along the fiels line (due to v∥ ), we can substitute TdBdt
with B so that
the Farady's law lead to the following equation:
= B
B
From calculus we know that if y x
=yx
then :
yx=
∂yx
∂ x x
∂yx
∂ y y=−
y
x2 x y
x=−
y
x2 xy
x2 x=0
For this reason =
B=0 and the magnetic moment is an adiabatic invariant for slow changes
in time or small changes in space of the magnetic field. The system has then two constants, μ and the
kinetic energy =∥=12
m v
2v∥
2 . When the particle moves towards a region of space where
the field lines converge, the value of B grows. To keep μ constant, =12
m v
2 must increase at the
expenses of ∥=12
m v∥
2 until v∥=0 . When this limit is reached, the motion reverses and the
particles moves towards regions where the filed lines are widening with increasing parallel velocity.
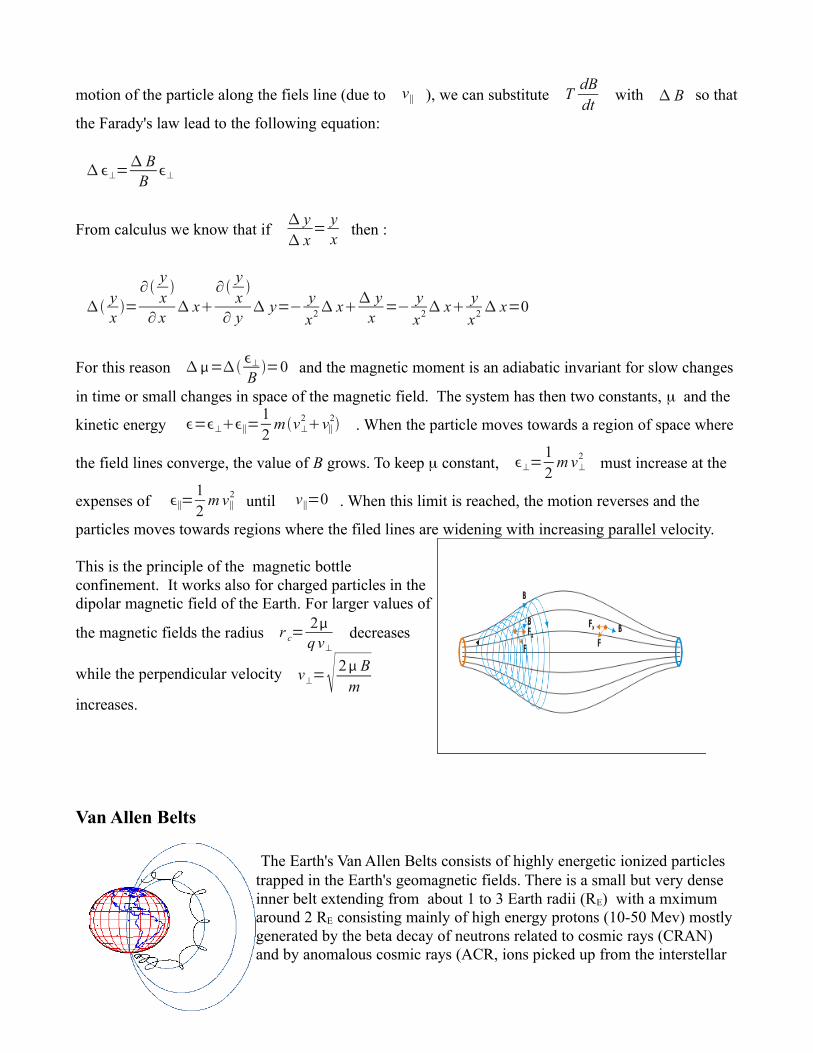
This is the principle of the magnetic bottleconfinement. It works also for charged particles in thedipolar magnetic field of the Earth. For larger values of
the magnetic fields the radius r c=2q v
decreases
while the perpendicular velocity v= 2 Bm
increases.
Van Allen Belts
The Earth's Van Allen Belts consists of highly energetic ionized particles trapped in the Earth's geomagnetic fields. There is a small but very dense inner belt extending from about 1 to 3 Earth radii (RE) with a mximum around 2 RE consisting mainly of high energy protons (10-50 Mev) mostly generated by the beta decay of neutrons related to cosmic rays (CRAN) and by anomalous cosmic rays (ACR, ions picked up from the interstellar

neutral gas at the heliosphere). Heavier ions like O+ (1-00 Kev) are also present possibly produced bythe interaction of the gyromagnetic particles with the upper atmosphere or by solar storms. Low energye- are also populate the inner belt.
The outer belt is made mostly of high-energy e- and low energetic protons (that form plasma with e- ). It extends from about 3 to 9 Earth radii with the center at about 6 Earth radii. There can be large variations due
to solar wind storms and distortions can occurlike that shown in the side figure (Baker et al.,Nature 432, 878–881, 2004) detected bySAMPEX mission:
South Atlantic anomaly: the inner Van Allen Belt is aligned with the magnetic field whose axis is inclined respect to the Earth’s rotation axis. In addition, the center of the dipolar field is shifted respect to the Earth’s center. As a consequence, the magnetic field B and the Van Allen Belt are closer to the Earth’s surface in the South as shown in the following picture.

Antimatter in the Van Allen Belts: cosmic rays colliding with the atmosphere of the Earth create sprays of new particles, including antiparticles. Many antiparticles get trapped inside the belts. Previous space missions has already discovered positrons, now a spacecraft has detected also antiprotons.

Magnetosphere of the Earth.
The interaction of the solar wind with the magnetic field of the Earth gives origin to a very complex environment called the magnetosphere (see figure3 below).
The radial solar wind is deflected by the magnetic field lines and a complex structure is created around the planet characterized by complicate plasma fluxes. We can derive an approximate estimate of the average size of themagnetosphere and how it responds to changes in the solar wind parameters like density and average velocity. We first estimate the pressure due to the solar wind particles following the lines of the particle-in-a-box
approach for the computation of a ideal gas pressure. The variation of the momentum due to a single particle of the solar wind plasma interacting with an imaginary surface dx⋅dy perpendicular to the Sun-Earth direction (z-axis) is:
p=−mv
Usually, in the kinetic theory for ideal gas p=−2 mv since it is assumed that the gas particle bounces back on the same direction. In our case the particle is deflected and we can assume as a first approximation that the deflection occurs at 90o respect to the original velocity. As a consequence, the variation of momentum in the radial direction after the interaction is only p=−mv since the motion after the interaction is in a direction perpendicular to the initial motion. The total force due to N particles interacting with the surface (N is the number of particles reaching the surface in a time dt) is then:
F= p⋅N
dt=
N m v2
dz
The pressure is the force divided by the area of the surface so:
P=FA=
N mv 2
dx⋅dy⋅dz=
N m v2
V=v2
The magnetic pressure which is the force of deflection (or radius of the induced gyromotion) is expressed by the formula:
P M=B2
20

Equating the two expression for the pressure we find the radius were the two forces balances:
v2=
B2
20
=M B
2
20 r6
where MB is the magnetic dipole moment for the Earth. Solving the above equation in r we get an approximate value for the magnetosphere radius:
r M=M B
2
20v2
16
For average values of the solar wind density (ρ » 5 p+ per cm3, v » 300 km/s) we get rM » 10 RE.
Northern lights (aurora borealis).

APPENDIX A: proof of the formula for the drift motion due to the field curcature.
Let's start from the case where the gyromagnetic motion of a charged particle is perturbed by an electric field. The configuration of the fields is such that the magnetic field B is directed along the z-axis while the E field is constant and uniform with any direction. The Lorentz's force has the following expression:
m v=qEv×B
We introduce a reference frame moving with velocity vRF=E×B
B2 . In this reference frame, the
velocity of the charged particle is u=v−vRF=v−E×B
B2 . Since both the fields E and B are
constants, u=v . In this new reference frame, we can study the trajectory of the charged particle since we know its equation of motion:
m u=m v=qEv×B=q EuE×B
B2×B=q Eu×B
E×B×B
B2
Recalling the rules that relate the cross product of 3 vectors to the dot product of the same vectors:
A×B×C=A⋅C B−B⋅C A
we get:
m u=q Eu×BE⋅BB
B2−E =q u×BE⋅b b
where b=BB=z . Let's split the velocity of the particle in a component u∥=u⋅b parallel to the z-
axis and in a component u⊥=|u−u∥⋅b| perpendicular to the z-axis and then to the magnetic field B.The equation of motion can be split in two equations for each of the velocity components. For the parallel component we get:
m u⋅b=m u'∥=q (( b⋅b)(E⋅b)+(u×B)⋅b)=q E∥
The motion along the z-axis is accelerated by the component of the electric field along the z-axis. We can go back to the original reference frame and compute the equation of the velocity v∥ since:
u∥=u⋅b=v⋅b−(E×b)
b=v⋅b=v∥
As a consequence, the equation for the parallel component of the velocity in the initial reference frame is:
v∥=qm
E∥ t+v∥0

The most interesting part is the motion in the planet perpendicular to the z-axis:
m u−m u∥ b=q( b(E⋅b)+u×B−E∥ b)=q(u×B)=qu∨×B=m u ⊥
This equation implies that the motion in the new reference frame is a gyromagnetic motion around the new z-axis. In the initial reference frame it is a gyromagnetic motion with a guiding center which
moves with a velocity v gc=v ∥ b+E×B
B2 . The first term is a motion along the direction of the filed
while the second term is the drift motion in a direction perpendicular to the field B. Along the derivation of the equation for v gc we never used any relation between the magnetic and electric field,Maxwell's equations were never used. This implies that the derivation holds if instead of the Electric field we use any other force field like gravity. In this case the drift velocity would be:
v gc=vDG=m
q B2G×B
since it is possible to make the substitution E=Fq=
mqG along the proof of the drift velocity. The
same holds for the centrifugal force and this leads to the demonstration of the formula for v D1 .If the field lines of the magnetic field B are bent, we can introduce a local reference frame with the z-axis along the tangent to the field line. The gyromotion is supposed to follow the field line moving along it with the velocity v∥ . Locally, this is a circular motion whose center is located along the perpendicular direction to the local tangent of the field line and whose radius is the local curvature radius Rc . In a reference frame moving with v∥ along the field line the particle feels a centrifugal force equal to:
F cf=mv∥
2
Rc
r=m v∥
2 RcRc
If we assume that this force is felt by a particle performing a gyromotion, than we can resort to the
results for the Electric field by substituting E=F cfq
so that the formula for the drift is:
vD1=F cf×B
q B2 =m v∥
2 Rc×B
R c q B2=m v∥
2 B×n
R cq B2
dove Rc=−n .
* Introduction to Plasma Physics, Goldston and Rutherford, IOP publishing Ltd, 1995

APPENDIX B: standard way to compute field lines from a vector field
Given a vector field V (x , y)=(v1(x , y ), v2(x , y)) , the equations for the field lines can be
computed in the following way. The 2D derivative is dydx
=v2(x , y )
v1(x , y ) which, integrated by parts,
gives ∫ v1(x , y)dy=∫ v2(x , y )dx . This integration gives a function y(x) which is the equation of the field line.
APPENDIX C: MHD
1) Ideal magnetohydrodynamics.
The Euler equations for a fluid are
∂ρ
∂ t+∇(ρu)=0
ρ(∂u∂ t
+u⋅∇ u)=−∇ P+ρ f+ j×B
where the term j×B is the Lorentz force on moving charges. A generalized Ohm’s law can be deduced in this way. In the fluid reference frame J=σE ' where all quantities like J and E’ are computed in the comoving frame. In the fixed reference frame, taking into account the transformation
law of the electric field E '=E+v×B the same equation becomes 1σ J=E+v×B . In ideal
conditions of perfect conductivity (electrons free to move without resistance i.e. without impacting protons typical of a low density fluid) σ → ∞ and E=−v×B . Inserting this relation into
Maxwell’s equation ∇×E=−∂B∂ t
⇒∂ B∂ t
=∇×(v×B) . This last is the induction equation,
one the MHD equations. From Maxwell’s equation for B ∇×B=μ0 J−1
c2
∂E∂ t
we can neglect the
last term if we are in non-relativistic conditions, so for the current density we get J=1μ0
∇×B
. The final complete set of equations for MHD are:
∂ρ
∂ t+∇ (ρu)=0
ρ(∂u∂ t +u∇ u)=−∇ P+ρ f+ j×B
∂B∂ t
=∇×(v×B)
J=1μ0
∇×B
P=Kργ

where the last equation is a state equation (barotropic condition) to close the equations.
2) Magnetic pressure
Lorentz’s term in the momentum equation can be manipulated by using the induction equation in order
to get: − j×B=B×J=1μ0B×(∇×B) . Taking into account the following vector calculus
indentities: A×(∇×C)=A⋅∇ C−(A⋅∇ )C12∇ (A⋅A)=A⋅∇ A
we can get 1μ0B×(∇×B)=
1μ0
(B⋅∇ )B−1
2μ0
∇ B2.
On the right side of the equation there is a pressure term given by the gradient of the magnetic field B
to the square. We can define a magnetic pressure −∇ ( B2
2μ0) which contributes to the total pressure
on the fluid: −∇ (P+ B2
2μ0) . This additional pressure term is anti-parallel to the curvature radius of
the local magnetic field line. When comparing the relevance of the kinetic and magnetic pressure term
a coefficient β β=gas pressure
magnetic pressure=
P
B2/2μ0
is usually introduced. For the solar corona this
value is β ~ 3.5 x 10-3 which means that the magnetic pressure is stronger. For the solar wind a Earth’s orbit, β ~ 2 implying that the two pressures re comparable. The presence of this magnetic pressure explains also why sunspots have a lower temperature than the surrounding gas and then appear dark.
Ù_-- Imagine the sunspot as a vertical magnetic flux tube:
Within the flux tube the fluid is stationary, which means that u=0 and also its time and spatial derivatives. The magnetic field B0 is vertical and constant along the tube. As a consequence:
ρ(∂u∂ t
+u∇ u)=0=−∇ P+ j×B . As a consequence
−∇ P+ j×B=−∇ P−B×J=−∇ P−1μ0B×(∇×B)=−∇ P+
1μ0
(B⋅∇ )B−1
2μ0
∇ B2=
1μ0
(B⋅∇ )B−∇(P+B2
μ0)

Since the magnetic field is vertical and constant within the tube, the magnetic tension term
1μ0
(B⋅∇ )B=0 and the pressure term
∇ (P+B2
2μ0
)=0 . As a consequence, the kinetic
and magnetic pressure terms are equal within and outside the tube. If we assume that outsidethe flux tube the magnetic field is =0 then
PE+BE
2
2μ0
=P0+B0
2
2μ0
⇒ PE=P0+B0
2
2μ0
If we invoke the perfect gas equation, assumingthat the gas density is equal within and outsidethe tube, we have
PE=ρEK BT EmE
P0=ρ0KBT 0
mEComparing the temperature,
T 0
T E=1−
B02
2μ0PE⇒ T E>T 0 . Ad example, in a solar sunspot, T0 ~3700 K while TE ~ 5700 K.
3) Alfven’s theorem and freezing of magnetic field lines
In a perfectly conducting plasma (i.e. in the conditions for which MHD is valid), the magnetic field lines move with the plasma flow. In other words, the magnetic field is frozen into the fluid and has to move along with it. To prove it, let’s start from the following figure:
The curve c encloses a surface S which moves with the plasma. In a given time interval dt, an element of the curve c determined by the vector dssweeps an aread (marked in blue Iin the figure) equal to
Area=(v dt)×ds
The flux of magnetic field through this area is given by
∬S
B⋅dS

while its change with time byddt (∬S B⋅dS) . The amount of flux exiting (or entering) through the
area (in blue) is calculated as B⋅((vdt )×ds)=−((v dt)×B)⋅ds where ((v dt)×ds) is a vector perpendicular to the area and whose module is equal to the area spanned by the two vectors
v , ds . The total flux through the area is finally −∫c
((vdt )×B)⋅ds . The change in flux can
then be split into two contribution: 1) a change with time of the magnetic field ∂B∂ t
2) a flux of B
through the walls spanned by the surface S given by −∫c
((vdt )×B)⋅ds . Adding up the two
contributes we get:
ddt (∬S
B⋅dS)=∬S∂ B∂ t
⋅dS−∫c
v×B⋅ds
where in the second term dt is simplified because of the time derivative. By using the Stokes’ theorem on the second term of the above equation we obtain ddt (∬S
B⋅dS)=∬S∂ B∂ t
⋅dS−∬S
∇×(v×B)⋅dS
(ds is the line element, dS the surface element). Grouping the two terms on the right we getddt (∬S B⋅dS)=∬S (
∂B∂ t
−∇×(v×B))⋅dS=0 which is equal to 0 because within the brackets theres
is the induction equation. As a consequence, the flux of magnetic field does not change if the circuit c moves through the plasma and the magnetic field is ‘frozen’ to the plasma.