The LES model's role in jet noise
10
The LES model’s role in jet noise Paul Tucker Whittle Laboratory, University of Cambridge,1 JJ Thompson Avenue, Cambridge CB3 0DY, UK abstract Problem definition, near wall modeling and other factors, including grid structure along with its implications on filter definition, are suggested to be of potentially greater importance for practical jet simulations than the LES (large eddy simulation) model. This latter element in itself can be theoretically questionable. When moving to realistic engine conditions, it is noted that disentangling numerical influences from the LES model’s appear difficult and negates the model value with its omission potentially being beneficial. Evidence cited suggests that if using an LES model for jets, choosing the numerically best conditioned or the one the code has or, for a dissipative solver, even LES model omission seems sensible. This view point precludes combustion modeling. Tensors of additional derivatives, used in non-linear LES models, when expanded, can yield potentially several hundred interesting derivatives. It is suggested that the MILES (monotone-integrated LES) and LES communities should move towards seeing where modified equation derivatives connect with derivatives that appear in more state of the art non-linear LES models. Then the best features could be combined to form mixed MILES–LES models or even mixed MILES–LES–RANS models. Combustion modeling also presents hybridization potential but in a different context. Most MILES-modified equation analysis focus on the spatial discretization and not the temporal. However, with some codes the spatial discretization terms are deliberately constructed to cancel temporal truncation error terms. Hence, the two things work in harmony and the temporal discretization can make a strong impact on resolved scales. & 2008 Elsevier Ltd. All rights reserved. Contents 1. Introduction ...................................................................................................... 427 2. Numerical influences ............................................................................................... 429 2.1. Temporal discretization ....................................................................................... 429 2.2. Grid influence .............................................................................................. 429 2.3. Acoustic processing .......................................................................................... 432 3. LES model uncertainties ............................................................................................ 432 4. Hybrid NLES–RANS ................................................................................................ 433 5. Boundary condition influences ....................................................................................... 434 6. Total of all influences .............................................................................................. 434 7. Conclusions ...................................................................................................... 435 Acknowledgments ................................................................................................. 435 References ....................................................................................................... 435 1. Introduction The failure of RANS (Reynolds averaged Navier–Stokes) models at yielding accurate off-design (involving significant separated flow and hence large scale time-dependent eddies) aerodynamics predictions, noise source information and predictive capability for the control of drag, noise and mixing processes in general, has resulted in the increasing use of large eddy simulation (LES) related techniques. The poor performance of RANS models for jets is illustrated by Georgiadis and DeBonis [1] and for separated flows at off-design conditions, in general aerodynamics, by Tucker [2]. Specifically, for jets, measurements show that a plane jet- spreads faster than a round one but the ke model gives the opposite trend. This is called the round jet/plane jet anomaly. For Mach numbers (Ma) greater than 1, the jet-spreading rate decreases reaching around a factor of 2 at Ma ¼ 2. RANS models will not predict this. Rectangular jets, that are horizontally long ARTICLE IN PRESS Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/paerosci Progress in Aerospace Sciences 0376-0421/$ - see front matter & 2008 Elsevier Ltd. All rights reserved. doi:10.1016/j.paerosci.2008.06.002 E-mail address: [email protected] Progress in Aerospace Sciences 44 (2008) 427–436
-
Upload
paul-tucker -
Category
Documents
-
view
217 -
download
0
Transcript of The LES model's role in jet noise

ARTICLE IN PRESS
Progress in Aerospace Sciences 44 (2008) 427–436
Contents lists available at ScienceDirect
Progress in Aerospace Sciences
0376-04
doi:10.1
E-m
journal homepage: www.elsevier.com/locate/paerosci
The LES model’s role in jet noise
Paul Tucker
Whittle Laboratory, University of Cambridge, 1 JJ Thompson Avenue, Cambridge CB3 0DY, UK
21/$ - see front matter & 2008 Elsevier Ltd. A
016/j.paerosci.2008.06.002
ail address: [email protected]
a b s t r a c t
Problem definition, near wall modeling and other factors, including grid structure along with its
implications on filter definition, are suggested to be of potentially greater importance for practical jet
simulations than the LES (large eddy simulation) model. This latter element in itself can be theoretically
questionable. When moving to realistic engine conditions, it is noted that disentangling numerical
influences from the LES model’s appear difficult and negates the model value with its omission
potentially being beneficial. Evidence cited suggests that if using an LES model for jets, choosing the
numerically best conditioned or the one the code has or, for a dissipative solver, even LES model
omission seems sensible. This view point precludes combustion modeling. Tensors of additional
derivatives, used in non-linear LES models, when expanded, can yield potentially several hundred
interesting derivatives. It is suggested that the MILES (monotone-integrated LES) and LES communities
should move towards seeing where modified equation derivatives connect with derivatives that appear
in more state of the art non-linear LES models. Then the best features could be combined to form mixed
MILES–LES models or even mixed MILES–LES–RANS models. Combustion modeling also presents
hybridization potential but in a different context. Most MILES-modified equation analysis focus on the
spatial discretization and not the temporal. However, with some codes the spatial discretization terms
are deliberately constructed to cancel temporal truncation error terms. Hence, the two things work in
harmony and the temporal discretization can make a strong impact on resolved scales.
& 2008 Elsevier Ltd. All rights reserved.
Contents
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
2. Numerical influences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429
2.1. Temporal discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429
2.2. Grid influence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429
2.3. Acoustic processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432
3. LES model uncertainties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432
4. Hybrid NLES–RANS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433
5. Boundary condition influences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434
6. Total of all influences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434
7. Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
1. Introduction
The failure of RANS (Reynolds averaged Navier–Stokes) modelsat yielding accurate off-design (involving significant separatedflow and hence large scale time-dependent eddies) aerodynamicspredictions, noise source information and predictive capability forthe control of drag, noise and mixing processes in general, has
ll rights reserved.
resulted in the increasing use of large eddy simulation (LES)related techniques. The poor performance of RANS models for jetsis illustrated by Georgiadis and DeBonis [1] and for separatedflows at off-design conditions, in general aerodynamics, by Tucker[2]. Specifically, for jets, measurements show that a plane jet-spreads faster than a round one but the k�e model gives theopposite trend. This is called the round jet/plane jet anomaly. ForMach numbers (Ma) greater than 1, the jet-spreading ratedecreases reaching around a factor of 2 at Ma ¼ 2. RANS modelswill not predict this. Rectangular jets, that are horizontally long

ARTICLE IN PRESS
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436428
and thin will, as they develop become vertically long and thinultimately becoming round. Most eddy viscosity based RANSmodels will again struggle to model this trait. Also, for wall jetswhere the flow physics becomes considerably more complex (thesubtle wall physics coming into play), even the Reynolds stressmodel can over predict the jet-spreading rate by 30%.
Added impetus for the use of LES has been given by the recenttremendous increases in affordable computing power. Also,potential new vistas are provided by the relatively cheap graphicalprocessor units used in children’s games (see Pullan and Brandvik[3]). The Navier–Stokes equations provide a remarkably accuratedescription of turbulent flow. However, the wide range of spaceand time scales found in turbulence make their direct solution(direct numerical simulation, DNS) expensive. This is especiallythe case for wall-bounded flows. Scaling estimates, for LEScomputing demands, with respect to Reynolds number can befound in Piomelli [4]. These stark statistics have given rise to thedisappointing performance of RANS being set aside and to theserious consideration of unsteady RANS and the vexing theoretical
0.35
0.25
0.15
0.05
-0.05
Am
plitu
de (m
/s)
0 0.0005 0.001 0.0015 0.002 0.0025µt, ave (kg/m s)
Non-linearmodels
Linearmodels
Measuredvalue
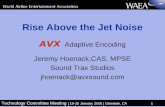
Fig. 1. Plot of average unsteadiness amplitude against average eddy viscosity for
linear and non-linear (U)RANS models.
Table 1Numerical solution procedures/codes and LES models considered
(a) Range of solvers and (b) range of LES models.
questions that this presents (see Spalart [5]). However, perhapsnot surprisingly, experiences with this approach can be disap-pointing, as catalogued by Tucker [6]. Fig. 1 plots the predictedaverage unsteadiness amplitude against volume averaged eddyviscosity for a complex geometry system [7] and a range of eddyviscosity models. The circles represent results for linear modelsand the diamonds for non-linear models. Full lines representingbest fits to these datasets are also shown. The horizontal dashedline is the measured unsteadiness amplitude. Clearly, the modelsnature strongly influences the predicted temporal content and infact even broad flow features are highly model dependent. WithLES the situation is very different.
For LES, the intention is that roughly around a fifth of theturbulence energy is modeled, the remaining being directlynumerically resolved. With regards to LES, like RANS, there isalso much open debate on the most appropriate LES model andthe ability of numerical influences to replace the LES model.Realization of the latter is most frequently described as MILES(monotone-integrated LES, see Boris et al. [8] or implicit LES(ILES)). However, a wide range of other names can also be found inthe literature for this controversial concept of omitting an explicitLES model. Here, mostly in a jet noise context, it is hoped thereader will see the LES model’s importance and hence the strengthof the MILES versus LES debate, in relation to other modelingelements such as: numerical influences, problem definition,solution uniqueness, transition, near wall modeling, grid quality,etc. The paper’s philosophy does not encompass the LES ofcombustion processes where modeling plays a crucial role (see,for example, Fureby [9] and Pitsch [10]). However, since jetsessentially involve detached shear layers the conclusions drawnhere have strong relevance to many applications beyond jets. Forexample, boundary later separation involves detached shearlayers.
Numerical influence is assessed by considering simulations of ajet case for the five different flow solvers. Essentially, the same5�106 cell grid is used. For these simulations, no LES model isused. Then jet simulations for a range of LES models are discussed.In this way an idea can be gained in relative terms how thenumerics and how the LES model influence results. The numericalschemes/programs and LES models are summarized in Tables 1(a)and 1(b), respectively. For the jet simulations—unless otherwisestated evidence for views are based on lateral/radial variations of

ARTICLE IN PRESS
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436 429
variables in the self-similar region. Axial variations of peakReynolds shear stresses in shear layers are also considered alongwith second-order correlation coefficients (not presented here).These are located in shear layers and at the jet axis. Numericalinfluences, LES model uncertainties, hybrid LES–RANS modeladvantages and defects and boundary condition influences arediscussed later in the paper.
2. Numerical influences
With LES involving an explicit model, numerical influencesmust be insignificant relative to contributions from the LES model.When moving towards realistic engine conditions, if solutions arenot to have significant ‘MILES/ILES’ character, this poses a serioussolution constraint. As noted by Chow and Moin [11], thenumerous forms of the Navier–Stokes equations, when discretizedusing the same numerical scheme will give different numericalinfluences. Also, there are a vast range of temporal and spatialdiscretizations. With regards to spatial, we can have staggeredgrids, cell-centered or vertex codes, codes with explicit smoothers,Rhie and Chow interpolation [12], different mesh singularitytreatments, we can have codes that focus on the Lagrangian ratherthan Eulerian frames or a mix of the two. Even nominally, the‘same scheme’ can be discretized differently. For example, one-and two-legged discretization forms, these terms making adistinction between whether the interpolation function is applieddirectly to the variable being solved for or a function of it.
2.1. Temporal discretization
As noted by Tucker [13], different implementations of theCrank–Nicolson (CN) scheme (even with a maximum Courantnumber well below 1) can make substantial (20%) differences tojet turbulence statistics. This is illustrated in Fig. 2, in which theradial distribution of the streamwise Reynolds stress is plotted inthe self-similar region. The symbols give the measurements ofHussein et al. [14] and Panchapakesan and Lumley [15]. The longdashed line gives the prediction for a five-stage Runge-Kuttascheme. The short dashed line gives the result for a CN form that
Fig. 2. Radial distribution of streamwise Reynolds stress for different temporal
discretizations.
is standard to a reputable code. It is formally second order butstabilized. A more standard CN scheme form is represented by thefull line. The maximum Courant number is small at around 0.5.However, the strong discretization effect can be clearly seen.Naturally, from this it follows that a first-order backwardsdifferences temporal scheme is highly unsuited to LES. Itintroduces substantial solution contamination even for impracti-cally small values of Courant number [16].
2.2. Grid influence
Discretizations which tend, for industrial solvers, to migrate tohaving dissipative elements, must ultimately be represented ongrids. The non-alignment to the flow and skewing of different celltypes also tends to produce further dissipation [13]. These aspectswhen combined with an LES model then tend to (with moretypical engineering codes) produce an excess of dissipation.Furthermore, with jets, far field numerical boundary conditionscan play a strong role. The potential significant, non-vanishing with
grid (unless extended filters are used), spatial numerical influenceis well illustrated by Chow and Moin [11], Ghosal [17] and Vremanet al. [18]. From these works, it is clear that the ability todisentangle numerical influences from those of the LES model isnot a trivial task that is to be taken for granted.
To illustrate the strong grid influence, tests are considered forthe unstructured grids shown in Fig. 3. These are used to modelthe spatial development of a subcritical Tollmien–Schlichting(T–S) instability wave in a plane channel. This flow is linearlystable for Reco5772 (see Orszag [19]). The Reynolds number isbased on the half-channel height and the centerline velocity. ForReoRec, instabilities show a downstream decay. Through con-sidering Poiseuille flow, a T–S wave can be obtained fromeigensolution of the Orr–Sommerfeld equation. After Navier–Stokes equation linearization and assuming a wave-like solution,the resulting Orr–Sommerfeld equation can be written as follows:
U0 �oR
a
� � d2
dy2� a2
!�
d2
dy2U0
24
þi
aRe
d2
dy2� a2
!235v ¼ 0. (1)
Here, U0 is a base flow of the form U0(y) ¼ y(2h�y), where h is thehalf-channel height. Also, a is the complex wave number a ¼aR þ iaI and oR the real frequency. The variables aR and oR arerelated by the expression c ¼ oR=aR. After obtaining v fromEq. (1), if desired, the remaining velocity component can be easilycalculated via the continuity equation.
Just grid snapshots for the lower channel half are shown inFig. 3. The hexahedral cell grid (see the right-hand side) uses 259nodes in the streamwise ‘x’-direction and 67 in the cross-stream‘y’-direction. This modest grid allows differences between thevarious spatial schemes to be observed. Grids are generally refinedat solid boundaries using a hyperbolic tangent function. Thenumerical domain has a height of 2 units in the verticaly-direction. The domain in the x-direction is uniform extendingat least 51 channel heights. When triangle cells are tested, thenodal locations are essentially (where possible) the same as forthe hexahedral grids the triangulations being formed about thesenodes. However, due to the inclusion of triangulation, the numberof edges typically increases by around 30%. A reputable edge-based solver is considered. Hence computational demands risewith increasing number of edges. The grid referred to as Voronoi isshown in the top right-hand corner of Fig. 3. As can be seen, thisgrid is in fact hybrid. The construction of a pure Voronoi grid,which can capture the sharp near wall velocity gradients, without

ARTICLE IN PRESS
Fig. 5. Voronoi mesh for a viscous boundary layer.
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436430
radically altering the streamwise grid spacing, being a challengingtask. For the current (Fig. 3) hybrid-Voronoi grid, the center of thechannel is tessellated with equilateral triangles. To permit thehigh aspect ratio cells, most suited to modeling, the near wallregion, to be linked to the Voronoi requires sudden grid-spacingtransition. This is potentially problematic but no ill effects arefound in the current results.
The graph at the center of Fig. 3 shows the decay of v0 (verticalvelocity fluctuation) for the subcritical T�S wave. The analyticsolution to the Orr–Sommerfeld equation is represented bysymbols. From Fig. 3, it is clear that Grid 2 (lower left-handcorner) gives the worst accuracy. However, this grid, when testedfor vortical and cut-on acoustic waves gave encouraging results.
As shown, in Fig. 3, the modest hexahedral grid showsreasonable agreement with the analytic solution. On the otherhand, the hybrid-Voronoi grid (even though the linking of thedifferent grid topologies is far from smooth) does well. In fact, ithas the highest accuracy. It is important to stress that this grid hasaround 40% less nodes and over 30% less edges than thehexahedral grid. Hence, the strong sensitivity of results to gridstructure are clear from Fig. 3. It is important to state that this isnot a quirk of the particular unstructured code used and will occurfor other solvers. Fig. 4 shows the control volume structuresfor the grid that gives the worst result (Grid 2) and the best(the Voronoi).
The key property that improves the predictive accuracy is thatthe control volume face is orthogonal to the line connecting thenodes that straddle it. This is consistent with the observations of
Fig. 3. Plot of T–S wave decay with streamwise distance fo
Fig. 4. Control volume configurations for worst and b
Moulinec et al. [20]. Anyway from this discussion it is clear thatfor LES simulations, the cell shape can potentially stronglyinfluence results—even ignoring filter definition and commuta-tion issues for the different grids. Hence, there seems plenty ofroom for research into optimal grid topologies for LES.
With regards to this, Fig. 5 shows a plausible ‘Voronoi’ gridform for a viscous boundary layer. Unfortunately, the grid lacksthe streamwise- orientated high aspect ratio cells necessary forthe economical LES computation of boundary layers. Hence,
r different grid topologies with an unstructured code.
est subcritical T–S wave propagation prediction.

ARTICLE IN PRESS
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436 431
hybrid-Voronoi hexahedral cells perhaps seem a more realisticoption, with careful blending of the two grid topologies. We notewith regards to grid that we expect disturbances at Chimera gridinterfaces and errors with excessive grid stretching—especially forcompact schemes (see Chung and Tucker [21]). Hence, carefulattention to grid is required along with the spatial and temporaldiscretizations, if numerical influences are to be disentangledfrom the LES model. Traditionally, the mesh and solver have beenconsidered as independent research aspects. This is not a goodthing and it is important to know how a particular mesh will workwith a particular solver.
In the light of all of the above issues, it might seem pragmatic,especially with dissipative codes, following Shur et al. [22],Uzun and Hussaini [23] and Tucker [24] to omit the LESmodel, acknowledging that the contribution of the numerics,when combined with those of the LES model, is likely to causean excess of dissipation. For example, with a Ma ¼ 0.6 jet,Uzun and Hussaini use a 50�106 cell grid. This is heavily focusedin the near field jet region. A sixth-order smoother is used (withno LES model). However, still there is evidence of near fieldturbulence suppression. In the literature, simulations usingno explicit LES model have been given a wide range of names.These include:
�
quasi-DNS [22]; � alternative LES (ALES); � numerical LES (NLES); � implicit LES (ILES); � MILES. � no model simulations; or � the no model-model;0.015
0.010
0.005
0.0000 5
x/D10
Bridges & WernetHYDRAUCCIS3DBOFFSVU40
15
u’V
’/U2 j
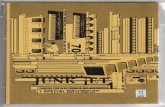
Fig. 6. Axial variation of the peak shear stress in the shear layers.
As noted by Pope [25], since there is certainly modeling takingplace, the title ‘no model’ is misleading. Hence Pope recommendsthe term numerical LES (NLES) and this is used here. Ideally, withNLES, numerical diffusion would drain energy from small scalesand reminiscent of more advanced LES models, NLES wouldintroduce some backscatter (see Rider and Margolin [26]).
Grinstein and Fureby [27] show NLES can adequately capturesome complex jet noise vortex dynamics. Hence, to consider thesensitivity of NLES to numerical discretization jet simulations forfive different, structured and unstructured, flow solvers weremade. These used essentially the same circa 5 million cell grids.The codes are summarized in Table 1a, giving their approximatenumerical features. HYDRA is essentially a cell vertex code thathas a second-order centered difference flux (Fctr). The controlvolume face flux is expressed as Ff ¼ (FL+FR)/2 with Table 1, insetschematic, nomenclature being used. Added to this flux is afourth-order smoother. This is intended to more than balance ananti-diffuse error term that comes from the temporal discretiza-tion. The ~r
2f terms in Table 1a represent undivided Laplacians.
Also, the subscripts LL and RR identify points to the left and rightof the L and R nodes, respectively. All codes can essentially beviewed has having centered fluxes with smoothing fluxes added tothem. However, VU40 uses an on-legged CN scheme with purecentral differences and staggered grids. BOFFS is a structured,curvilinear, second order, CN, turbulence model test bed. Theconvective flux discretization it uses is not too dissimilar toHYDRA (see Table). The key feature of UCCIS3D is that it is a cell-centered unstructured code. It uses a fairly standard Roe [28]scheme where again, as with the other numerical schemes, thelevel of upwinding/dissipation can be reduced through e. The finalTable 1a code is a version of HYDRA with a flow adaptive edistribution (see Mary and Saguat [29]). Where point-wisewiggles are detected (these cannot be associated with resolved
turbulent structures) is e increased. BOFFS can also be used in thisdynamic mode. When the dynamic procedure is not used, thestatic, spatially varying e field shown in Ref. [30] is used. Furtherdetails of the codes can be found in Tucker et al. [30].
All codes, with the exception of a neutrally dissipative VU40code (see Tucker [31]), gave encouraging NLES statistics in theself-similar region. However, with the addition of LES modeling,results for the dissipative codes deteriorated due to an excess oftotal dissipation. Since VU40 is neutrally dissipative, its NLESresults were worse than for all the other codes and an LES modelwas helpful (having said this for a plane jet, LES model omissionwas of little consequence to results). However, when studyingshear layer correlation coefficients and statistics, agreement forthe different codes becomes much less encouraging. This can beseen from Fig. 6 that plots the peak shear stress in the shear layernormalized by the jet exit velocity. The lines are for the differentnumerical treatments/codes with Re ¼ 1�104 (based on the jetdiameter and outlet velocity Uj) and the symbols are measure-ments of Bridges and Wernet [32].
The scatter in the predicted streamwise Reynolds stresspredictions along the centerline and correlation coefficient atthe centerline (not shown here) is considerably less. The shearlayer peak shear stress scatter is probably not totally related tonumerics and the measurements also display some scatter. Inflowconditions will have a substantial influence in this region.Having said this, eddy viscosity based LES models (which alterthe effective Reynolds number) can significantly influence fineshear layer scales. Elements of the numerical discretizations willalso alter the effective Reynolds number through so-callednumerical or false diffusion. This connection with LES is used asa basis for the justification of MILES use. Hence, it does not seemunlikely that this zone, as with LES, will show greater ‘model’sensitivity.
Nonetheless, the scatter/curve envelope in results for all thedifferent codes, for the comparisons noted (excluding the peakshear stress), were not too different to that shown in Fig. 2, used tocontrast the two CN scheme forms. Note, the large variation in theCN scheme results is due to one form of scheme not reallysatisfying basic LES entry-level requirements. Hence, we canconclude that all Table 1a methods appear to satisfy LES entry-level requirements.
As noted earlier, the cell shape can potentially stronglyinfluence results—even ignoring dependencies on filter definitionand commutation errors for the different grids. To give anindication of the importance of grid quality, Fig. 7 contrasts

ARTICLE IN PRESS
Fig. 7. NLES predictions for the NASA Glenn chevron geometry: (a) ‘O’ grid near the axis and (b) ‘H’ grid.
ZY
X
10
5
0
-5-10
z
0 5 10 15 20 25x-10
0
10
y
110
105
100
95
SP
L (d
B)
0 20 40 60 80 100 120Theta °
Tanna0L0.25L0.5L0.75L1L
1.08
1.06
1.04
1.02
1In
tegr
al o
f SP
L/In
tegr
al o
f Tan
na S
PI
0 0.2 0.4 0.6 0.8 1L
Fig. 8. Acoustic post-processing results: (a) FW–H surface, (b) cold jet far field sound, and (c) integrated data.
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436432
predictions for the geometry of Bridges and Brown [33] for ‘O’-and ‘H’-type near axis grids. The former configuration results in anextreme number of radial grid lines converging on the jet axis(a large number of circumferential nodes is needed to resolve thechevrons). As can be seen from Frame (a), this has caused extremenear axis numerical stiffness. The flow appears as if there is a finewire at the axis. However, clearly the ‘H’ grid result in Frame (b) issatisfactory.
2.3. Acoustic processing
Continuing the theme of numerical quirks, for NLES jetsimulations predicted acoustic waves for the different codes,noted in Table 1a, showed, unlike the turbulence statistics,substantially different traits. Also, ultimately, to get far fieldsound, this acoustic information is fed into an acoustic post-processor. This will also give further numerical influence/model-ing uncertainties. For example, with the Ffowcs Williams andHawkings [34] (FW–H) integral surface approach, the placementand configuration of the integral surface is a key modelingdecision. This aspect is illustrated in Fig. 8. Frame (a) gives theFW–H surface configuration used for the basic round jetsimulations noted above. With the FW–H approach, surfaceintegral data must in essence be stored in the irrotational regionof the flow (zone with no turbulence). For jets this is a well-knownproblem. The mean flow carries turbulent eddies a long waydownstream through the non-cylindrical disc surface. This hasresulted in the ‘closing disk problem’ considered by many
workers. For jets with co-flow, that are more representative ofmany aero-engines, this issue gets worse. Generally, a proportionof the downstream disk is left open. The question is, how muchshould be left open? Frame (b) plots the far field sound (overallsound pressure level) for the cold jet comparing with measure-ments of Tanna [35] for different disk-opening levels. The label 0L
corresponds to no disk and 1L to fully closed. As can be seen, awide range of answers can be gained depending on the fraction ofL. Frame (c) plots L against the integral of the sound intensitycurve. The horizontal line is the integrated value for themeasurements. Again (see wavy line), the strong predicted soundvariation can be seen with closing disk extent.
On balance, a simple cylindrical surface is probably the mostappropriate choice since it reduces the potential for solutiontuning.
However, when surveying the literature, opinions on thesurface configuration are diverse but as can be seen have anextreme impact on predicted far field sound levels. Hence, with jetLES, there are a wide range of numerical uncertainties that cloudjudging the performance of an LES model. Uncertainties in thelatter will be discussed next.
3. LES model uncertainties
Most LES models assume isotropy of the modeled scales.However, with evidence for the existence of worm-vorticescharacterizing the smallest coherent turbulent structures, thisassumption is open to question. Hence, the applicability of LES

ARTICLE IN PRESS
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436 433
models is an important question. Although the Smagorinsky LESmodel is popular it is well known that it drains energyfrom all scales and not, as it should, just the smallest resolvedscales. Also, it does not provide backscatter and the strainrate term does not vanish at the wall. The latter gives rise toad hoc modifications. Furthermore, at walls intricate elongatedvortices occur, the resolution of which creates serious problems.This latter aspect has been a strong driving force behindthe development of hybrid LES–RANS methods pioneered bySpalart [36]. These utilize near wall RANS modeling to cover overthe fine near wall structures. It is important to note that eddyviscosity based models, like the Smagorinsky, alter the effectiveReynolds number of the flow. Consequently, as demonstrated byBogey and Bailly [37], for jets they exert an erroneous modelinginfluence on the more shear governed noise components. Also,with jets, for the flow to become independent of initial conditions,a Reynolds number of at least 4�105 is required (see Birch [38]).This all raises questions regarding the role of the effectiveReynolds number arising from use of eddy viscosity basedLES models on jet evolution, transition and side-line noise.Questions regarding the validity gradient-diffusion hypothesisfor transport equation based LES models are discussed by da Silvaand Pereira [39].
Most RANS models are based around Boussinesq’s 1877 [40]approximation. This crude approximation spawned non-linearquadratic and cubic RANS corrections. Examples of these can befound in Ref. [7]. In a sense, LES appears to be following a similarpath. For example, Kosovic [41], Wong [42] and Lund and Novikov[43] produced quadratic and cubic LES extensions to theBoussinesq approximation. The so-called ‘mixed models’ alsocan be viewed in the same non-linear model framework. Forexample, in Clark/Leonard’s [44] original model non-linear termsare added to the usual linear. Meneveau and Katz [45], note that a
priori tests for a range of flows suggest non-linear models are, onthe whole, superior to linear. Non-linear models make less use ofthe eddy viscosity. Hence they might be more resilient to theabove-noted effective Reynolds number influences. However, thisremains to be tested and for jets the performance of non-linearmodels remains unclear. For example, Liu et al. [46] contrasted
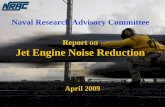
Fig. 9. Washing out of eddy vis
three non-linear and two-linear LES models for plane jets. Thesemodels (except for the scale similarity model [47]) are summar-ized in Table 1(b). In relation to the scatter in the benchmark data,it was difficult to conclude which model was better [46]. There area wide range of parameters to compare with when assessing eachmodel’s performance. These include the jet-spreading rate,centerline velocity decay, primary shear stress, streamwiseReynolds stress and vertical Reynolds stress. One model wouldbe better for one parameter but worse for the next and so on. Thisstudy was recently extended for jets with co-flow. For thisconfiguration, the scatter in measurements became even greater.This is partly attributed to the co-flow convecting the inflowuncertainty influences further downstream than would beencountered for the case with no-coflow. A part conclusion ofthese studies, that follows the line of thought of Grinstein [48], isthat the super grid scale influences, like boundary conditionspecifications were more important than the LES (subgrid)modeling. However, for these plane jet tests just a second-ordercentral difference scheme was used with a small filter. This is alsolikely to cloud LES model assessment since numerical influenceswill be significant.
4. Hybrid NLES–RANS
A key NLES problem is that at realistic Reynolds numbers (forsay aeroengines), with current computers, the scales of theintricate near wall turbulence structures will be impossible toadequately resolve. The cost scales as roughly Re2 [4]. Thismotivated the development of hybrid LES–RANS methods. Ofcourse, with hybrid LES–RANS the issue of excessive dissipativenumerical contamination in the LES zone remains. Hence, for around jet with coflow, Tucker [49] combines (through aHamilton–Jacobi equation) near wall RANS modeling with NLES.This approach is also adopted by Shur et al. [50]. The near wallRANS model will ensure a reasonable mean velocity boundarylayer profile enters the free shear layers and also preventseparation on convex surfaces. However, clearly this approachresults in negligible resolved scales in shear layers and this is an
cosity for an impinging jet.

ARTICLE IN PRESS
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436434
undesirable situation. Nonetheless, Georgiadis et al. [51] also gainencouraging results with a similar approach. With chevron(serrated) nozzles, essentially the chevron tip could be consideredas a sharp convex geometrical feature. As shown by Tucker and Liu[52], RANS models can exhibit anomalous behavior around suchregions giving dramatically different predicted eddy viscositylevels. This subsequently convects into the shear layer. Hence,there is a question mark regarding how well hybrid NLES–RANSwill perform for such problems. Indeed, there are many un-resolved theoretical questions with hybrid NLES–RANS methodsand they should be used with thought and care.
For example, experience shows that for flows where thepredominant flow source is essentially orthogonal to solidsurfaces, the RANS zone can be washed away. This is not alwaysunhelpful with regards to predictive accuracy but for certain casesit can be. The washing away is caused by low free stream modeledturbulence being convected into the boundary layer and washingout the modeled turbulence. Fig. 9 illustrates this phenomenon.The top frame shows the instantaneous flow field for theimpinging jet case being considered. The lower frames show eddyviscosity contours at different points in time. The top, eddyviscosity frame, corresponds to an early time and the lower later.The initial (early time frame) is based on a frozen RANS eddyviscosity field. This field is unfrozen and the eddy viscositybecomes washed away. The images are in fact for a hybridNLES–RANS simulation where one might well expect thisunhelpful behavior to occur. However, the eddy viscosity is alsolargely washed out for both standard SA and Menter SST [53]based DES when the volume-based filter is used. This filter provednecessary to gain shear layer transition.
5. Boundary condition influences
The typical momentum thickness used in LES for jets is aroundan order of magnitude larger than experiments (see Bodony andLele [54]). Bogey and Bailly [37] show this difference givesexcessive reduction in predicted turbulence and hence soundlevels. In addition, to accurately model full-scale jets, the initialboundary layer needs to be turbulent. It is difficult to achieve afully turbulent boundary layer for Reo104. The added require-ment of the boundary layer being thin (see Birch [55]) pushes thenozzle Reynolds number requirement closer to ReE106. This iswhat makes LES calculations of complete jets so difficult atpresent.
Inflow turbulence can be synthetically generated in a range ofways. However, Barre et al. [56] and Uzun and Hussaini [23]
Fig. 10. Ultimate sum of nume
strongly suggest that resolution of the upstream nozzle boundarylayers is necessary to gain relevant results with turbulencesynthesis and forcing best being avoided. As noted by DeBonis[57], upstream boundary layer resolution removes the substantiallevel of empiricism used to direct solutions to desired answers.Hence boundary layer resolution makes the simulations morepredictive in nature. Having said this, the high-grid resolutionsimulations of Uzun and Hussaini [23], that resolve the upstreamnozzle boundary layers, are not that convincing. This could bebecause the boundary layer Reynolds number in these simulationsis only about 300 and so the boundary layers are likely to have alaminar nature. Of course at higher Reynolds numbers, the griddemands become too severe. This leads back to the need forhybrid LES–RANS methods with perhaps, at the jet outlet, forcingof resolved scales based on upstream RANS zone information (seeBatten et al. [58]).
For jet LES simulation, non-reflecting inflow and outflowboundary conditions are necessary. In the literature, a wide rangeof strategies can be found in relation to this. As noted by Klein etal. [59], jets are sensitive to far field boundary conditions. Hence,that nature of their modeling is an important uncertainty that canexplain anomalies between various datasets. It is also worthnoting that inflow region metastability has been observed for jetswith co-flow. By this it is meant that for hot jets asymmetries canbe observed, even with careful alignment of the core and co-flows(see Birch et al. [60]). These could manifest themselves in somenumerical form, giving rise to solution non-uniqueness. This is notsuch an uncommon problem in other engineering systems.However, currently with regards to jets this remains an openquestion.
6. Total of all influences
As suggested schematically in Fig. 10, based on the abovediscussion, its seems the sum multiple influences for industrialLES is likely to be large. This figure indicates that the sum of theaffect of the initial form of the Navier–Stokes equation chosen, thediscretization, the grid, the LES and wall-modeling defects andproblem definition including boundary conditions, etc. will muchdilute the LES model influence. The latter, should, in theory, makea relatively small contribution. Hence, considering the uncertaintyassociated with it and the sum of all the other uncertainties, itstraditional focal role is questionable. Therefore, Fig. 11 industrialLES hierarchy is proposed. As expected, from the case setout inthis paper (non-combustion related), the LES model has relativelylow importance.
rical and other influences.

ARTICLE IN PRESS
Fig. 11. Industrial LES hierarchy.
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436 435
In part, this importance is greatly diluted since numericalscheme error/input can never be totally disentangled from that ofthe LES model. Consequently, as suggested by the upper arrowin Table 1, it would seem sensible to attempt to utilize anynumerical ‘error’ terms that play a positive modeling role andexplicitly compliment these with terms giving characteristics notmimicked by the numerical discretization. Hence hybridLES–NLES (LES–MILES) or even hybrid LES–NLES–RANS (LES–MILES–RANS) model can be formed—elements from Tables 1(a)and (b) being combined. The alternative is to seek robust, fasthigh-order schemes abandoning exiting low-order industriallegacy codes. The latter would need to be relatively insensitiveto grid form and this seems a big challenge.
7. Conclusions
Problem definition (such as characterizing inflow boundaryconditions), solution uniqueness (with coflowing jets in mind),near wall modelling, transition prediction, grid structure alongwith its implications on filter definition are of potentially greaterimportance for practical jet flows than the LES model itself. Also,this latter element can be theoretically questionable.
When moving to realistic engine conditions, disentanglingnumerical influences from the LES models appears difficult. Thisnegates the LES model’s value with its omission frequently beingbeneficial. Current evidence suggests that if using an LES modelfor jets picking the numerically best conditioned or the one thecode has or for a dissipative solver LES model omission seemssensible.
Tensors of additional derivatives, used in non-linear LESmodels, when expanded, can yield potentially several hundredinteresting terms. The MILES (NLES) and LES communities shouldmove towards seeing where modified equation derivativesconnect with derivatives that appear in more state of the artnon-linear LES models. Then the best features of these approachescan be combined to produce mixed MILES–LES (NLES–LES) modelsor even hybrid MILES–LES–RANS models. In the latter, the RANScomponent would cover the intricate near wall structures.
Many MILES modified equation analysis focus on the spatialdiscretization and not the temporal. However, this is perhaps notalways a good idea. For example, with some codes the spatialdiscretization terms are deliberately constructed to canceltemporal truncation error terms. Hence, the two things work inharmony and as noted the temporal discretization can have astrong impact on resolved scales. The compatibility of the gridstructure with the numerical discretization is of considerableimportance. The philosophy of this paper does not have combus-tion modeling in mind. However, here, again there seems the
potential for hybridization between MILES and subgrid scalemodel parameterizations.
Acknowledgments
Funding from the Engineering and Physical Sciences ResearchCouncil (EPSRC) under grant number GR/T06629/01 is gratefullyacknowledged. Also P.G. Tucker gratefully acknowledges RoyalSociety funding through a Royal Society Industry Fellowship.Thanks are also due to Dr I. Sazanov for supplying the stretchedVoronoi grid. Also, thanks to Mr. R. Jefferson-Loveday forsupplying Fig. 9, Mr. S. Eastwood for Figs. 6 and 8 and Dr. H. Xiafor Fig. 7.
References
[1] Georgiadis NJ, DeBonis JR. Navier–Stokes analysis methods for turbulent jetflows with application to aircraft exhaust nozzles. Prog Aerospace Sci 2006;42:377–418.
[2] Tucker PG. Turbulence modelling for problem aerospace flows. Int J NumerMethods Fluids 2006;51(3):261–83.
[3] Pullan G, Brandvik T. Acceleration of a 3D RANS solver using commoditygraphics hardware. In Proceedings of the 46th AIAA aerospace sciencesmeeting and exhibit, Reno, Nevada, 7–10 January 2008. Paper no. AIAA-2008–0607.
[4] Piomelli U. Wall layer models for LES. In: Proceedings of the 46th AIAAaerospace sciences meeting and exhibit, Reno, Nevada, 7–10 January 2008.Paper no. AIAA-2008-0603.
[5] Spalart PR. Strategies for turbulence modelling and simulations. Int J HeatFluid Flow 2000;21:252–63.
[6] Tucker PG. Computation of unsteady internal flows. Dordrecht: KluwerAcademic Publishers; 2001.
[7] Tucker PG, Liu Y, Chung M, Jouvray A. Computation of an unsteady complexgeometry flow using novel non-linear turbulence models. Int J NumerMethods Fluids 2003;43(9):979–1001.
[8] Boris JP, Grinstein FF, Oran ES, Kolbe RL. New insights into large eddysimulation. Fluid Dyn Res 1992;10:199–228.
[9] Fureby C. Towards the use of large eddy simulation in engineering (invited).In: Proceedings of the 46th AIAA aerospace sciences meeting and exhibit,Reno, Nevada, 7–10 January 2008. Paper no. AIAA-2008-0605.
[10] Pitsch H. Large eddy simulation of turbulent reacting flows. In: Proceedings ofthe 46th AIAA aerospace sciences meeting and exhibit, Reno, Nevada, 7–10January 2008. Paper on AIAA-2008-0604.
[11] Chow FK, Moin P. A further study of numerical errors in large eddysimulations. J Comput Phys 2003;184:366–80.
[12] Rhie CM, Chow WL. Numerical study of the turbulent flow past an airfoil withtrailing edge separation. AIAA J 1983;21(11):1525–32.
[13] Tucker PG. Rolls-Royce computational fluid dynamics research annual report.Chapter 9, October 2006. p. 207–18.
[14] Hussein HJ, Capp SP, George SK. Velocity measurements in a high Reynoldsnumber, momentum-conserving, axisymmetric turbulent jet. J Fluid Mech1994;258:31–75.
[15] Panchapakesan NR, Lumley JL. Turbulence measurements in axisymmetricjets of air and helium. Part I. Air Jet. J Fluid Mech 1993;246:197–223.
[16] Tucker PG, Davidson L. Zonal k-l based large eddy simulations. Comput Fluids2004;33:267–87.
[17] Ghosal S. An analysis of numerical errors in large eddy simulations ofturbulence. J Comput Phys 2002;125:187–206.
[18] Vreman B, Geurts B, Kuerten H. A finite volume approach to large eddysimulation of compressible homogeneous, isotropic decaying turbulence. Int JNumer Methods Fluids 1992;15:799–816.
[19] Orszag SA. Accurate solution of the Orr-Sommerfeld stability equation. J FluidMech 1971;50:689–703.
[20] Moulinec C, Benhamadouche S, Laurence D, Peric M. LES in a u-bend pipemeshed by polyhedral cells. In: Rodi W, editor. Engineering turbulencemodelling and experiments, vol. 6. Elsevier Ltd.; 2005. p. 237–46.
[21] Chung YM, Tucker PG. Accuracy of higher-order finite difference schemes onnonuniform grids. AIAA J 2003;41(8):1609–11.
[22] Shur ML, Spalart PR, Strelets MKh, Travin AK. Towards the prediction of noisefrom jet engines. Int J Heat Fluid Flow 2003;24:551–61.
[23] Uzun A, Hussaini MY, High frequency noise generation in the near nozzleregion of a jet. In: Proceedings of the 12th AIAA/CEAS aeroacousticsconference, 8–10 May 2006, Massachusetts. Paper no. AIAA 2006-2499.
[24] Tucker PG. Novel MILES computations for jet flows and noise. Int J Heat FluidFlow 2004;25(4):625–35.
[25] Pope S. Ten questions concerning the large eddy simulation of turbulentflows. New J Phys 2004;6.
[26] Rider WJ, Margolin L. From numerical analysis to implicit subgrid turbulencemodeling. AIAA Paper AIAA 2003-4101, 2003.

ARTICLE IN PRESS
P. Tucker / Progress in Aerospace Sciences 44 (2008) 427–436436
[27] Grinstein F, Fureby C. Recent progress on MILES for high Reynolds numberflows. ASME J Fluids Eng 2002;124:848–61.
[28] Roe PL. Approximate Riemann solvers, parameter vectors and differenceschemes. J Comput Phys 1981;46:357–78.
[29] Mary I, Sagaut P. Large eddy simulation of flow around an airfoil near stall.AIAA J 2002;40(6):1139–45.
[30] Tucker PG, Coupland J, Eastwood S, Liu Y, Jefferson-Loveday RJ, Hassan O.Contrasting code performances for computational aeroacoustics of jets. In:Proceedings of the 12th AIAA/CEAS aeroacoustics conference, 8–12 May 2006,Cambridge, Massachusetts. Paper no. AIAA-2006-2672.
[31] Tucker PG. Computation of unsteady internal flows. Dordrecht: KluwerAcademic Publishers; 2001.
[32] Bridgets J, Wernet M. Measurements of the aeroacoustic sound sources in hotjets. In: Proceedings of the 9th AIAA/CEAS aeroacoustics conference, SouthCarolina, 12–14 May 2003. Paper No. AIAA-2003-3130.
[33] Bridges J, Brown C. Parametric testing of chevrons on single flow hot jets. In:Proceedings of the 10th AIAA/CEAS aeroacoustics conference, Manchester, UK,May 2004. Paper no. AIAA-2004-2824.
[34] Ffowcs Williams JE, Hawkings DL. Sound generation by turbulence and surfacesin arbitrary motion. Phil Trans R Soc Lond, Ser A 1969;264(8):321–42.
[35] Tanna H. An experimental study of jet noise. Part 1: Turbulent mixing noise.J Sound Vib 1977;50(3):405–28.
[36] Spalart PR. Strategies for turbulence modelling and simulations. In: Proceed-ings of the 4th international symposium on engineering turbulencemodelling and measurements, Ajaccio, Corsica, France, 1999. p. 3–17.
[37] Bogey C, Bailly C. Decrease of the effective Reynolds number with eddy-viscosity subgrid-scale modeling. AIAA J 2005;43(2).
[38] Birch SF. The effect of initial conditions on high Reynolds number jets, July1983. AIAA Paper AIAA-83-1681.
[39] da Silva CB, Pereira JCF. Analysis of the gradient-diffusion hypothesis in large-eddy simulations based on transport equations. Phys Fluids 2007;19(3):035106.
[40] Boussinesq J. Theory de l’ecoulment tourbillant. Mem Pre. Par. Div. Sav. XXIII,Paris 1877.
[41] Kosovic B. Subgrid scale modelling for the large eddy simulation of highReynolds number boundary layers. J Fluid Mech 1997;336:151–82.
[42] Wong VC. A proposed statistical-dynamic closure method for linear ornonlinear subgrid-scale stresses. Phys Fluids A 1992;4:1080–2.
[43] Lund TS, Novikov EA. Parameterization of subgrid-scale stress by the velocitygradient tensor, Center for Turbulence Research. Ann Res Briefs 1992:27–43.
[44] Clark RA, Ferziger JH, Reynolds WC. Evaluation of subgrid-scale models usingan accurately simulated turbulent flow. J Fluid Mech 1979;91(1):1–16.
[45] Meneveau C, Katz J. Scale-invariance and turbulence models for large eddysimulation. Ann Rev Fluid Mech 2000;32:1–32.
[46] Liu Y, Tucker PG, Kerr RM. Linear and non-linear large eddy simulations of aplane jet. Comput Fluids 2008;37:439–49.
[47] Vreman AW. The filtering analog of the variational multiscale method inlarge-eddy simulation. Phys Fluids 2003;15(8):L61–4.
[48] Grinstein F. On integrating numerical and laboratory turbulent flowexperiments. In: Proceedings of the 36th AIAA fluid dynamics conference &exhibit, San Francisco, CA, 5–8 June 2006. Paper no. AIAA 2006–3048.
[49] Tucker P. Novel MILES computations for jet flows and noise. Int J Heat FluidFlow 2003.
[50] Shur ML, Spalart PR, Strelets MKh, Garbaruk AV. Further steps in LES-basednoise prediction for complex jets. Paper no. AIAA 2006-485.
[51] Georgiadis NJ, Alexander JID, Reshotko E. Hybrid Reynolds-averaged Navier–Stokes/large eddy simulations of supersonic turbulent mixing. AIAA J 2003;41(2):218–29.
[52] Tucker PG, Liu Y. Turbulence modeling for flows around convex featuresgiving rapid eddy distortion. Int J Heat Fluid Flow 2007;28(5):1073–91.
[53] Strelets M. Detached eddy simulation of massively separated flows. AIAApaper 2001-0879, 2001.
[54] Bodony DJ, Lele SK. Review of current status of jet noise predictions usinglarge-eddy simulation. In: Proceedings of the 44th AIAA aerospace sciencesmeeting & exhibit, 9–12 January 2006, Reno, Nevada.
[55] Birch SF. A review of axisymmetric jet flow data for noise applications. In:Proceedings of the 12th AIAA/CEAS aeroacoustics conference (27th AIAAaeroacoustics conference) 8–10 May 2006, Cambridge, MA. AIAA paper AIAA-2006-2602.
[56] Barre S, Bogey B, Bailly C. Computation of the noise radiated by jets withlaminar/turbulent nozzle exit conditions. In: Proceedings of the 12th AIAA/CEAS aeroacoustics conference (27th AIAA aeroacoustics conference), 8–10May 2006. Cambridge, MA. AIAA 2006-2443.
[57] DeBonis JR. Progress towards large eddy simulations for prediction of realisticnozzle systems. In: Proceedings of the 44th AIAA aerospace sciences meetingand exhibit, Reno, Nevada. AIAA Paper 2006–487, January 2006.
[58] Batten P, Goldberg U, Chakravarthy S. Interfacing statistical turbulenceclosures with large eddy simulation. AIAA J 2004;42:485–92.
[59] Klein M, Sadiki A, Janicka J. Investigation of the influence of Reynolds numberon a plane jet using direct numerical simulation. Int J Heat Fluid Flow2003;24:785–94.
[60] Birch SF, Lyubimov DA, Buchshtab PA, Secundov AN, Yakubovsky KYa. Jet-pylon interaction effects, May 2005. AIAA paper AIAA 2005-3082.