Nuno Vasconcelos UCSD - SVCL - Statistical Visual Computing Lab
The Gaussian classifier
Nuno Vasconcelos ECE Department, UCSDp ,

Bayesian decision theoryrecall that we have• Y – state of the worldY – state of the world• X – observations• g(x) – decision function• L[g(x),y] – loss of predicting y with g(x)
Bayes decision rule is the rule that minimizes the risk
for the “0-1” loss
[ ]),(, YXLERisk YX=
for the 0 1 loss
⎩⎨⎧ ≠
=yxg
yxgL)(0)(,1
]),([
2
⎩ = yxg )(,0
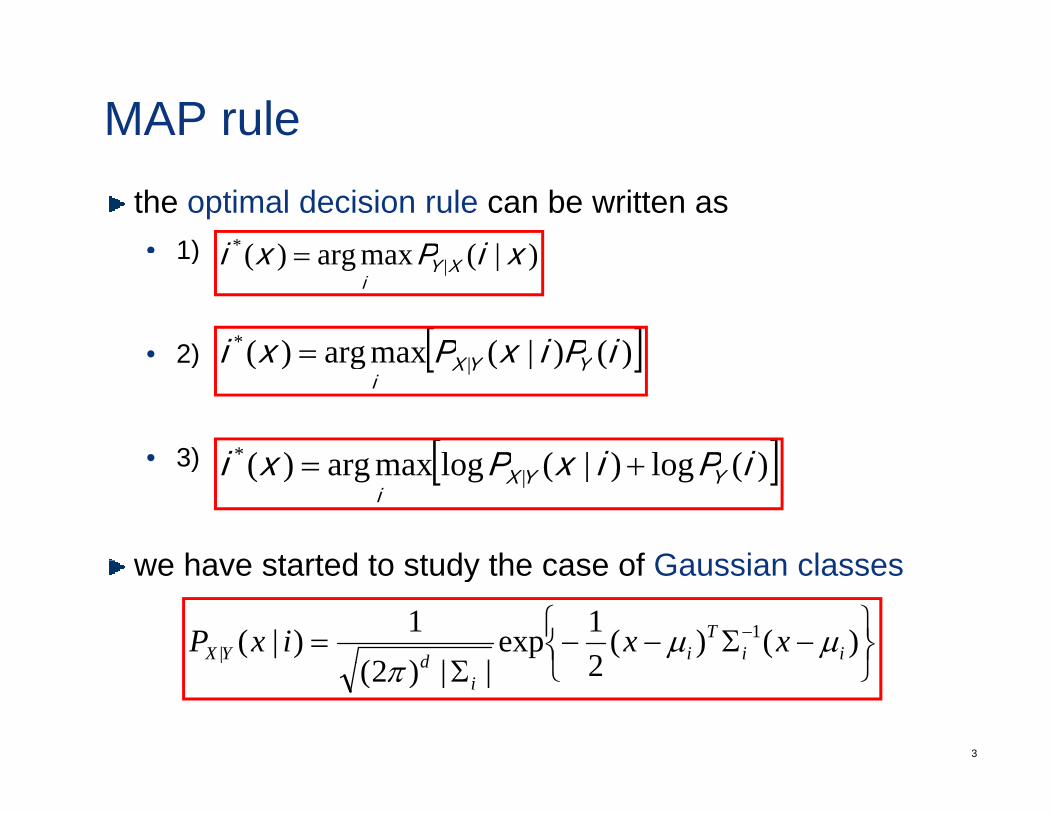
MAP rulethe optimal decision rule can be written as• 1) )|(maxarg)(* xiPxi1)
• 2)
)|(maxarg)( | xiPxi XYi
=
[ ])()|(maxarg)(* iPixPxi =• 2)
• 3)
[ ])()|(maxarg)( | iPixPxi YYXi
=
[ ])(l)|(l)(* iPixPxi +• 3)
we have started to study the case of Gaussian classes
[ ])(log)|(logmaxarg)( | iPixPxi YYXi
+=
we have started to study the case of Gaussian classes
⎭⎬⎫
⎩⎨⎧ −Σ−−
Σ= − )()(
21exp
||)2(1)|( 1
| iiT
idYX xxixP µµ
3
⎭⎩Σ 2||)2(|
idπ
The Gaussian classifierdi i i t
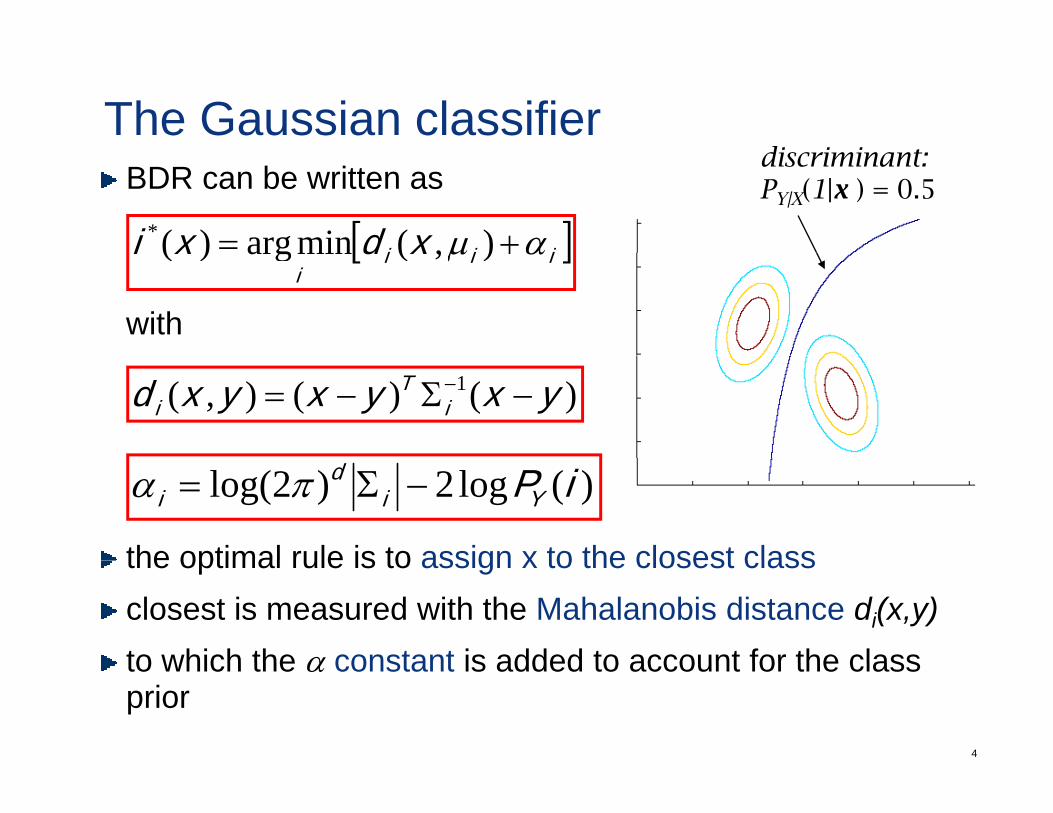
BDR can be written as
[ ]iii xdxi αµ += ),(minarg)(*
discriminant:PY|X(1|x ) = 0.5
with
[ ]iiii
xdxi αµ +),(minarg)(
)()(),( 1 yxyxyxd iT
i −Σ−= −
the optimal rule is to assign x to the closest class
)(log2)2log( iPYid
i −Σ= πα
the optimal rule is to assign x to the closest classclosest is measured with the Mahalanobis distance di(x,y)to which the α constant is added to account for the class
4
to which the α constant is added to account for the class prior
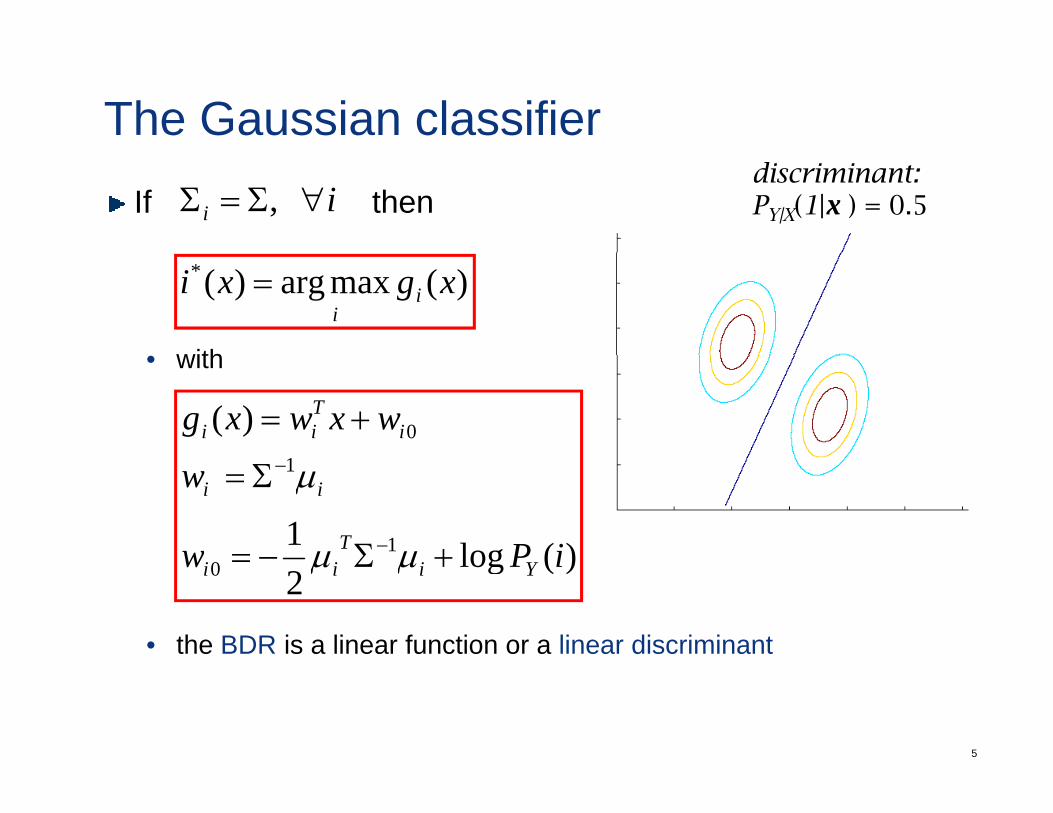
The Gaussian classifierIf then
discriminant:PY|X(1|x ) = 0.5ii ∀Σ=Σ ,
with
)(maxarg)(* xgxi ii
=
• with
)(1
0wxwxg iTii +=
)(log1 1
1
iPw
w
T
ii
+Σ−=
Σ=
−
−
µµ
µ
• the BDR is a linear function or a linear discriminant
)(log20 iPw Yiii +Σ= µµ
5
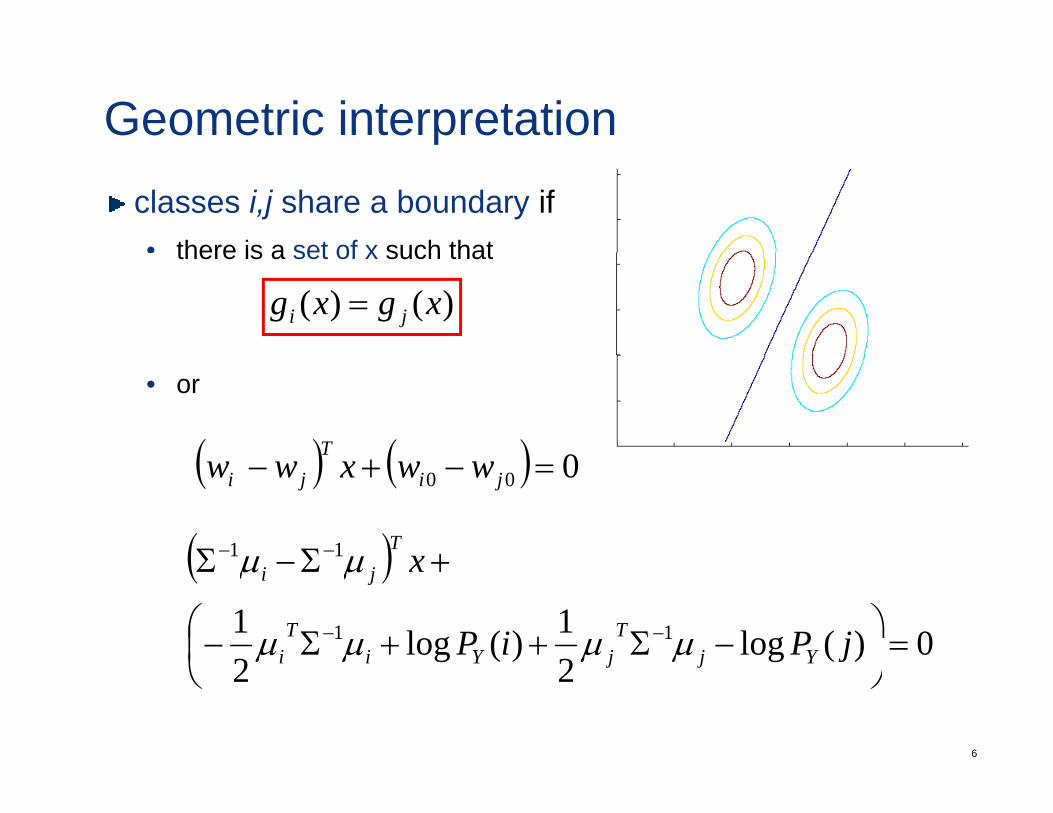
Geometric interpretationclasses i,j share a boundary if • there is a set of x such thatthere is a set of x such that
)()( xgxg ji =
• or
( ) ( ) 0T( ) ( ) 000 =−+− jiji wwxww
( )11 +ΣΣ −− xTµµ( )
0)(log21)(log
21 11 =
⎠⎞
⎜⎝⎛ −Σ++Σ−
+Σ−Σ
−− jPiP
x
YjT
jYiT
i
ji
µµµµ
µµ
6
22 ⎠⎝YjjYii
Geometric interpretationnote that( )11 +ΣΣ −− xT
µµ( )0)(log
21)(log
21 11 =⎟
⎠⎞
⎜⎝⎛ −Σ++Σ−
+Σ−Σ
−− jPiP
x
YjT
jYiT
i
ji
µµµµ
µµ
• can be written as
( ) )(1 ⎞⎛ iP
22 ⎠⎝
next we use
( ) 0)()(log2
21 111 =⎟
⎠
⎞⎜⎜⎝
⎛−Σ−Σ−Σ− −−−
jPiPx
Y
Yj
Tji
Ti
Tji µµµµµµ
next, we use
=Σ−Σ −−
TTTT
jT
jiT
i µµµµ1111
11
7
=Σ−Σ+Σ−Σ −−−−j
Tjj
Tij
Tii
Ti µµµµµµµµ 1111

Geometric interpretationwhich can be written as
11 TT ΣΣ −−
1111
11
jT
jjT
ijT
iiT
i
jT
jiT
i
µµµµµµµµ
µµµµ
=Σ−Σ+Σ−Σ
=Σ−Σ−−−−
)()(
)()(11
11
jiT
jjiT
i
jT
jijiT
i
µµµµµµ
µµµµµµ
=−Σ+−Σ
=Σ−+−Σ−−
−−
)()( 1ji
Tji
jjj
µµµµ −Σ+ −
using this in
( ) 0)(log21 111 =⎞
⎜⎜⎛
+ΣΣΣ −−− iPx YTTT µµµµµµ
8
( ) 0)(
log22
=⎠
⎜⎜⎝
+−Σ−Σ−Σ−jP
xY
jjiiji µµµµµµ
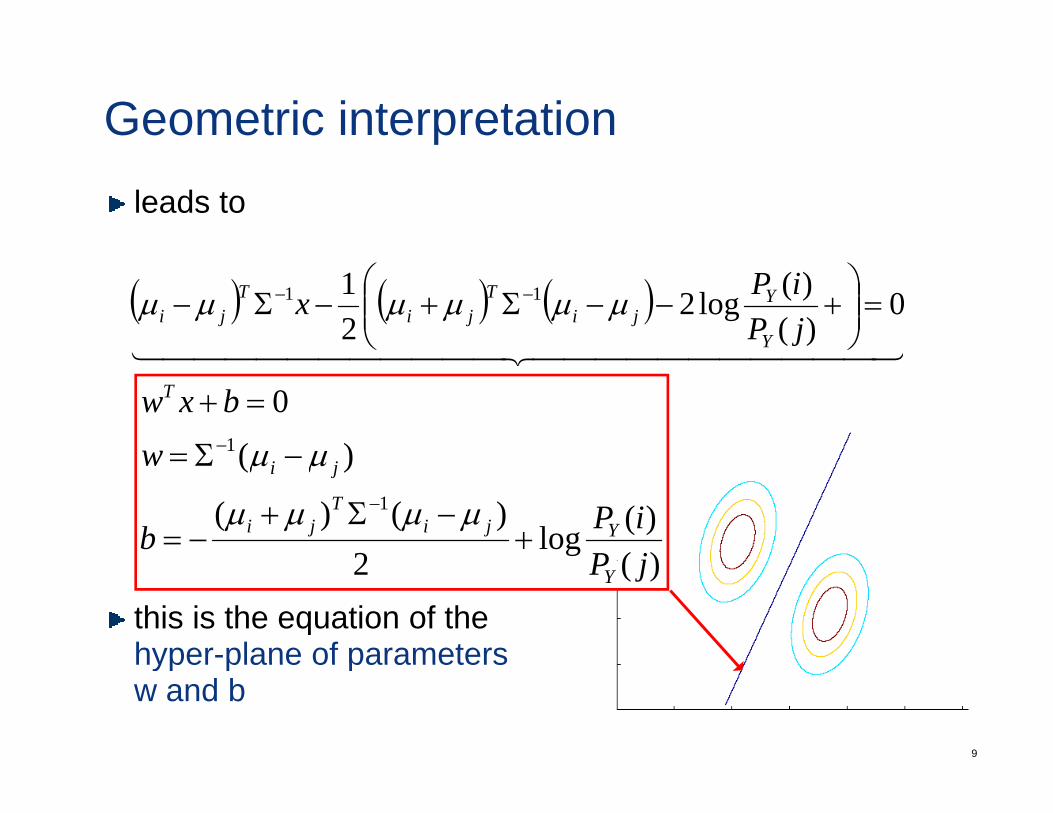
Geometric interpretationleads to
( ) ( ) ( )31
0)()(log2
21 11 =⎟⎟
⎠
⎞⎜⎜⎝
⎛+−−Σ+−Σ− −−
jPiPx
Y
Yji
Tji
Tji µµµµµµ
44444444444 344444444444 21
)(0
1wbxwT
−Σ=
=+− µµ
)()(log
2)()(
)(1
jPiPb
w
YjiT
ji
ji
+−Σ+
−=
Σ=− µµµµ
µµ
this is the equation of the hyper-plane of parameters
)(2 jPY
9
hyper plane of parametersw and b
Geometric interpretationwhich can also be written as
)(1 ⎞⎛ iP( ) ( ) ( )
( )
0)()(log2
21 11
⎞⎛
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−Σ+−Σ− −−
jPiPx
Y
Yji
Tji
Tji µµµµµµ
( ) ( )( ) ( ) 0
)()(log
2 11 =⎟
⎟⎠
⎞⎜⎜⎝
⎛
−Σ−
−+
+−Σ−
−−
jPiPx
Y
Y
jiT
ji
jijiTji µµµµ
µµµµµµ
or
( ) 00xxw T =−
( )( ) )(log
1
iPx
w
Yjiji
ji
µµµµ
µµ
−+
−Σ= −
10
( ) ( ) )(log
2 10 jPx
YjiT
ji µµµµ −Σ−−=
−
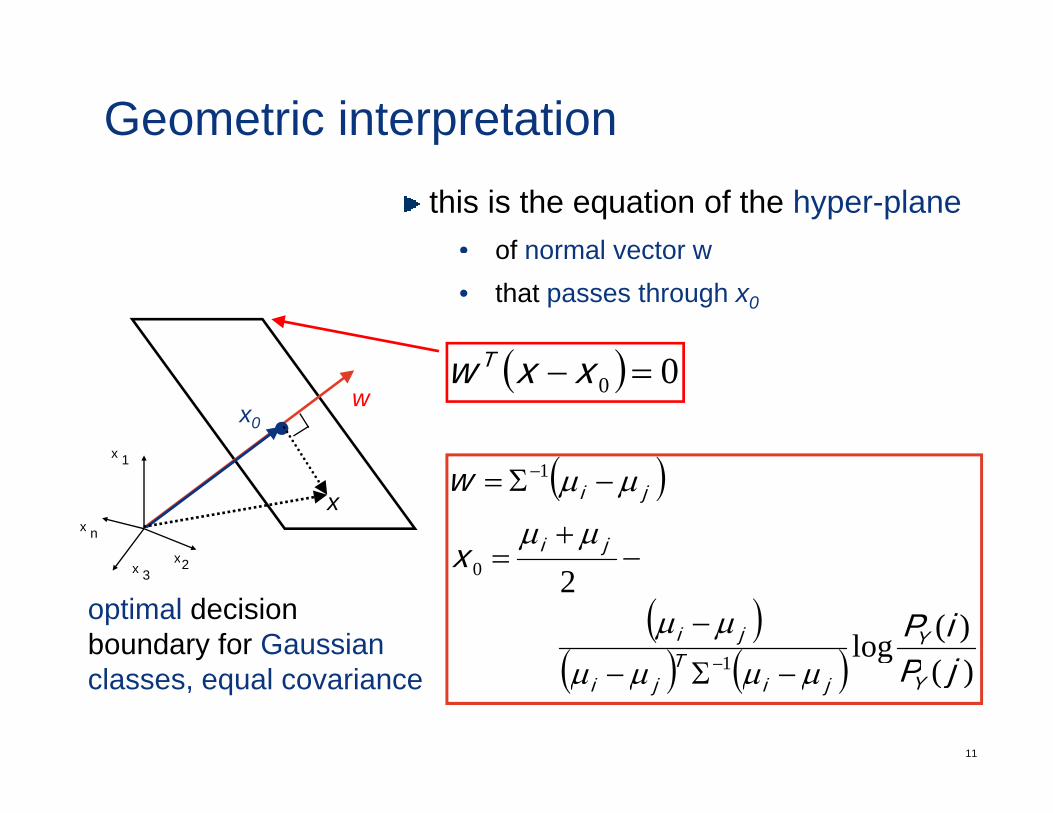
Geometric interpretationthis is the equation of the hyper-plane
• of normal vector wof normal vector w• that passes through x0
( )T ( ) 00 =− xxw T
x 1
wx0
( )1
x2
x n
x( )1
x
w
ji
ji
µµ
µµ
−+
=
−Σ= −
x 3x2
( )( ) ( ) )(
)(log
2
1
0
jPiP
x
YT
ji µµΣ
−
=
optimal decision boundary for Gaussian
11
( ) ( ) )(g
1 jPYjiT
ji µµµµ −Σ− −classes, equal covariance
Geometric interpretationspecial case i)
I2Σ
optimal boundary has
I2σ=Σ
jiwσµµ −
= 2
( )Y
Y
ji
jiji
jPiPx
µµ
µµσ
µµ
−
−−
+=
)()(log
2 202
( )jiY
Y
ji
ji
j
jPiP µµ
µµ
σµµ−
−−
+=
)()(log
2 2
2
12
Yjijµµ )(

Geometric interpretationthis is
( )ji
ji
iP
w
σµµσµµ
+
−=
)(
2
2
( )jiY
Y
ji
ji
jPiPx µµ
µµ
σµµ−
−−
+=
)()(log
2 20vector alongthe line throughµ and µ
σ
µi and µj
w
µi
µjσ
Gaussian classes
13
Gaussian classes, equal covariance σ2I
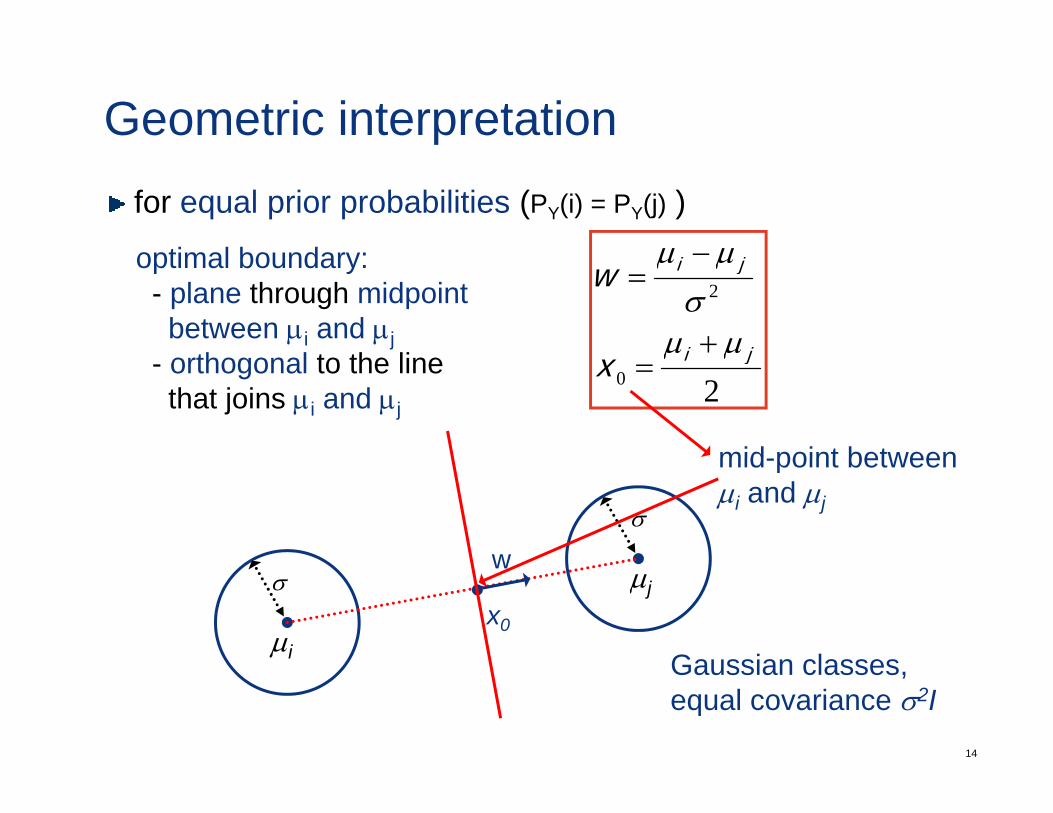
Geometric interpretationfor equal prior probabilities (PY(i) = PY(j) )
µµoptimal boundary:2
ji
jiw
µµσµµ
+
−=optimal boundary:
- plane through midpointbetween µi and µj
th l t th li20
jixµµ
=
mid point between
- orthogonal to the line that joins µi and µj
wσ
mid-point betweenµi and µj
w
µi
µjσx0
Gaussian classes
14
Gaussian classes, equal covariance σ2I
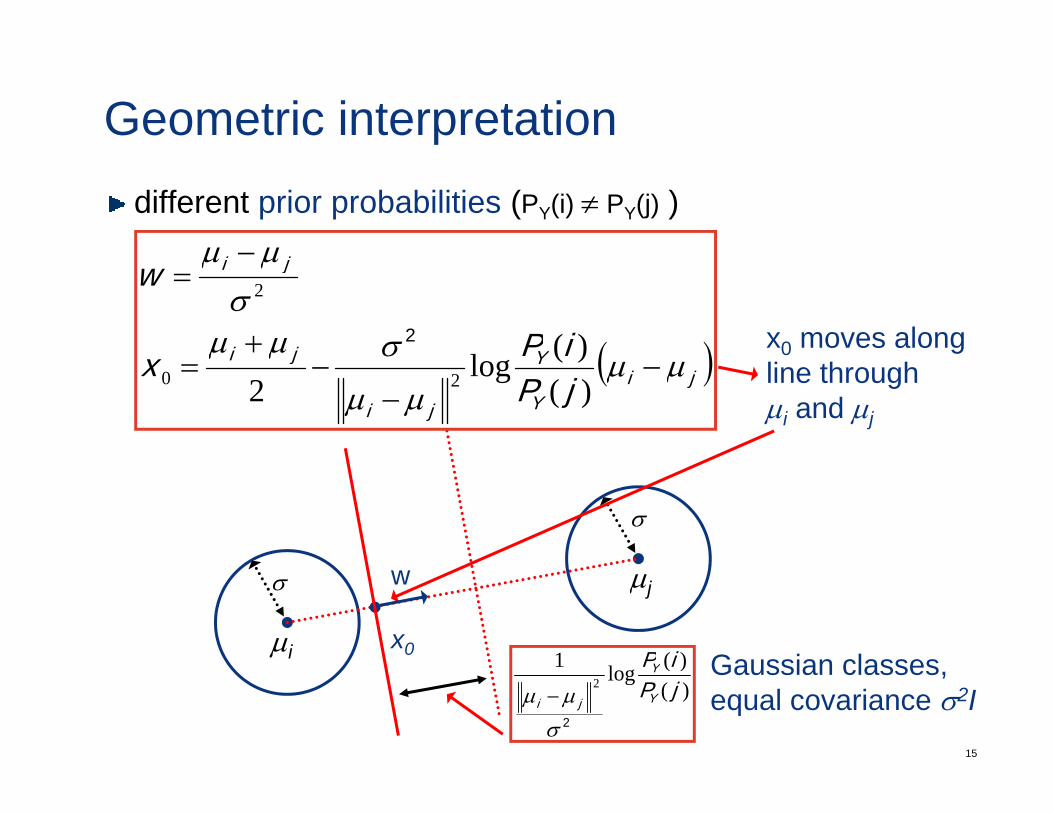
Geometric interpretationdifferent prior probabilities (PY(i) ≠ PY(j) )
µµ −
x0 moves along( )Yji
ji
iP
w
σµµσµµ
+
−=
)(l
2
2
line through µi and µj
( )jiY
Y
ji
ji
jPiPx µµ
µµ
σµµ−
−−=
)()(log
2 20
σ
w
µi
µjσ
x0Gaussian classes)(1 iPY
15
Gaussian classes, equal covariance σ2I)(
)(log12 jP
iP
Y
Y
ji2σµµ −
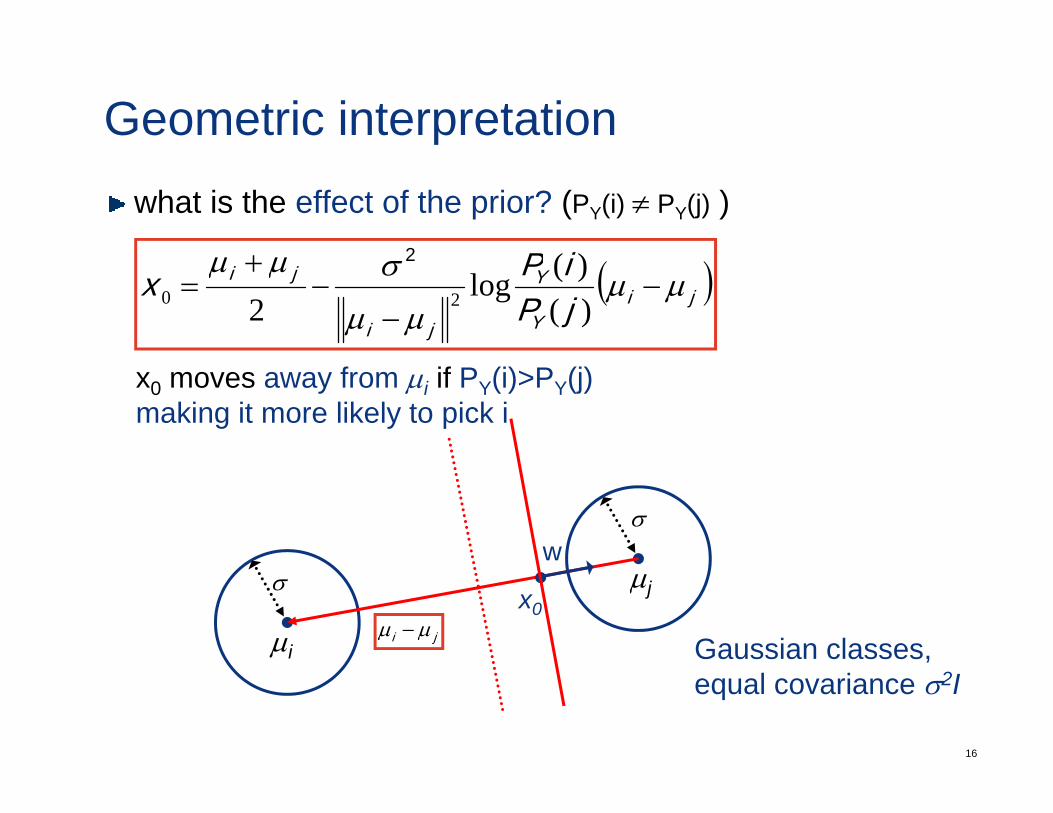
Geometric interpretationwhat is the effect of the prior? (PY(i) ≠ PY(j) )
iP2
( )jiY
Y
ji
ji
jPiPx µµ
µµ
σµµ−
−−
+=
)()(log
2 20
2
x0 moves away from µi if PY(i)>PY(j)making it more likely to pick i
wσ
µi
µjσx0
Gaussian classes, ji µµ −
16
equal covariance σ2I

Geometric interpretationwhat is the strength of this effect? (PY(i) ≠ PY(j) )
µµ −
“inversely( )Yji
ji
iP
w
σµµσµµ
+
−=
)(l
2
2
proportionalto the distance between means
( )jiY
Y
ji
ji
jPiPx µµ
µµ
σµµ−
−−=
)()(log
2 20
σin units of standard deviation”
w
µi
µjσ
x0Gaussian classes)(1 iPY
17
Gaussian classes, equal covariance σ2I)(
)(log12 jP
iP
Y
Y
ji2σµµ −
Geometric interpretationnote the similarities with scalar case, where
)0(2Yji Pσµµ +
while here we have
)1()0(log
2 Y
Y
ji
ji
PPx
µµσµµ−
++
<
while here we have
( )T xxw =− 00
( )ji
ji
iP
w
σµµσµµ
+
−=
)(
2
2
( )jiY
Y
ji
ji
jPiPx µµ
µµ
σµµ−
−−
+=
)()(log
2 20
18
• hyper-plane is the high-dimensional version of the threshold!
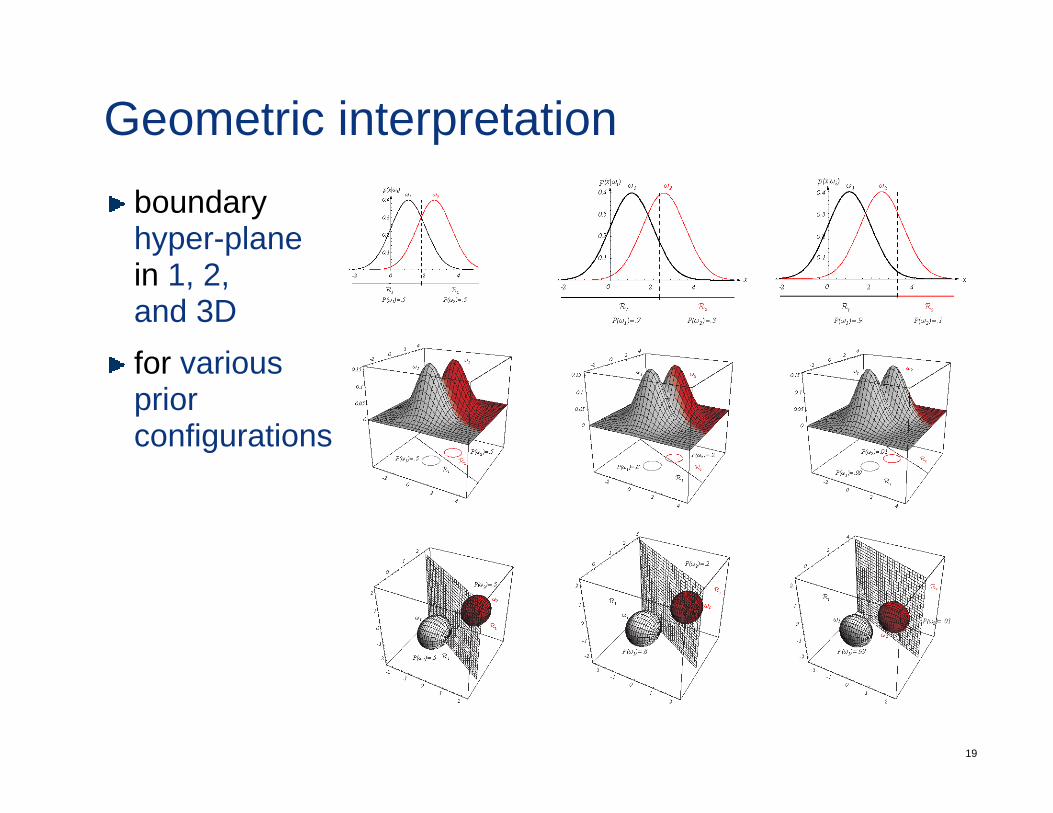
Geometric interpretationboundary hyper-planeyp pin 1, 2, and 3Df ifor various prior configurations
19

Geometric interpretationspecial case ii)
Σ=Σi
optimal boundaryT xxw =− 0)( 0
i
( )
( )Yji
ji
iP
wµµ
µµ
+
−Σ= −
)(1
)(1
0
• x0 basically the same strength of the prior inversely proportional
( ) ( ) ( )jiY
Y
jiT
ji
ji
jPiPx µµ
µµµµµµ
−−Σ−
−+
=− )(
)(log12 10
x0 basically the same, strength of the prior inversely proportional to Mahalanobis distance between means
• w is multiplied by Σ-1, which changes its direction and the slope of the hyper-plane
20
the hyper-plane
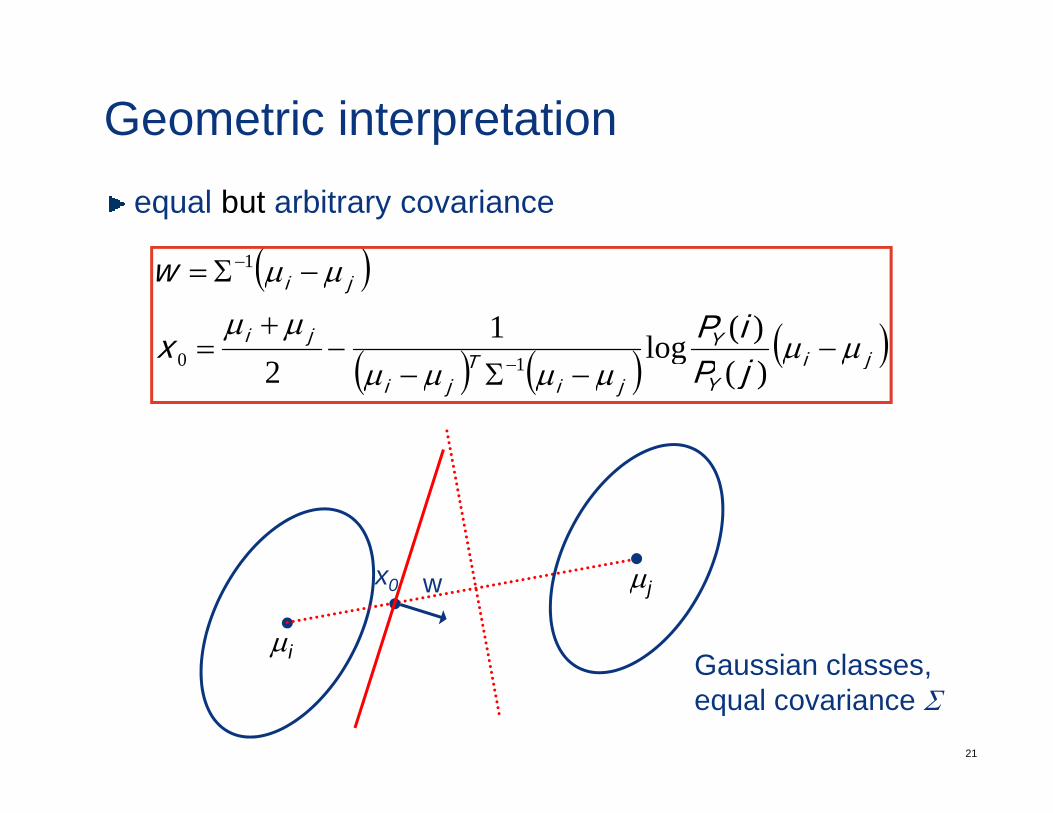
Geometric interpretationequal but arbitrary covariance
( )( )
( ) ( ) ( )jiY
Tji
ji
iPx
w
µµµµ
µµ
−−+
=
−Σ= −
)(log10
1
( ) ( ) ( )jiYji
Tji jP
x µµµµµµ −Σ− − )(
log2 10
w
µi
µjx0
Gaussian classes
21
Gaussian classes, equal covariance Σ
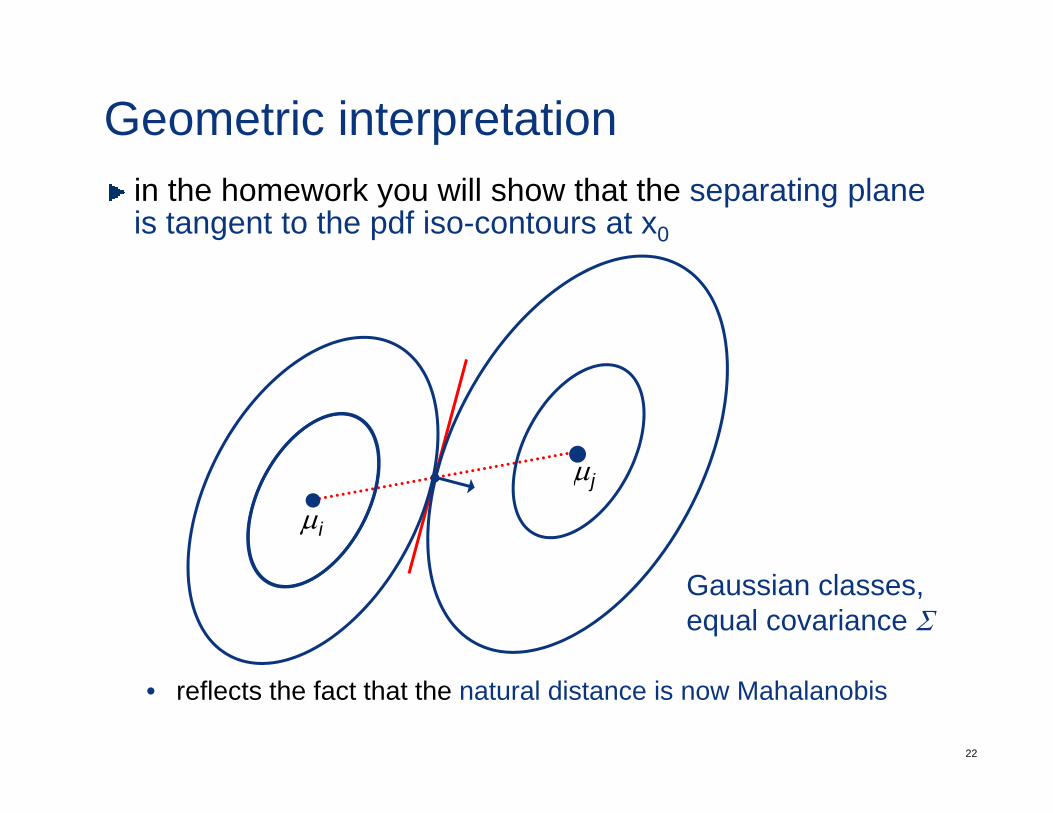
Geometric interpretationin the homework you will show that the separating plane is tangent to the pdf iso-contours at x0
µi
µj
Gaussian classes, equal covariance Σ
22
• reflects the fact that the natural distance is now Mahalanobis

Geometric interpretationboundary hyper-planein 1, 2, and 3Dfor various priorfor various prior configurations
23
Geometric interpretationwhat about the generic case where covariances are different?• in this case
[ ]iiii
xdxi αµ += ),(minarg)(*
i
)()(),( 1 yxyxyxd iT
i −Σ−= −
• there is not much to simplify
)(log2)2log( iPYid
i −Σ= πα
)(log2log2
)(log2log)()()(111
1
iPxxx
iPxxxg
YiiiT
iiiT
iT
YiiiT
ii
−Σ+Σ+Σ−Σ=
−Σ+−Σ−=−−−
−
µµµ
µµ
24
)(log2log2 iPxxx Yiiiiiii Σ+Σ+ΣΣ µµµ

Geometric interpretationand
)(l2l2)( 111 iPxxxxg TTT Σ+Σ+ΣΣ −−−
• which can be written as
)(log2log2)( 111 iPxxxxg YiiiiiiT
iT
i −Σ+Σ+Σ−Σ= µµµ
)(1
0
W
wxwxWxxg
ii
iTii
Ti
Σ=
++=−
)(log2log
21
0
1
iPw
w
YiiiT
ii
iii
−Σ+Σ=
Σ−=−
−
µµ
µ
for 2 classes the decision boundary is hyper-quadratic• this could mean hyper-plane pair of hyper-planes hyper-
25
this could mean hyper-plane, pair of hyper-planes, hyper-spheres, hyper-elipsoids, hyper-hyperboloids, etc.
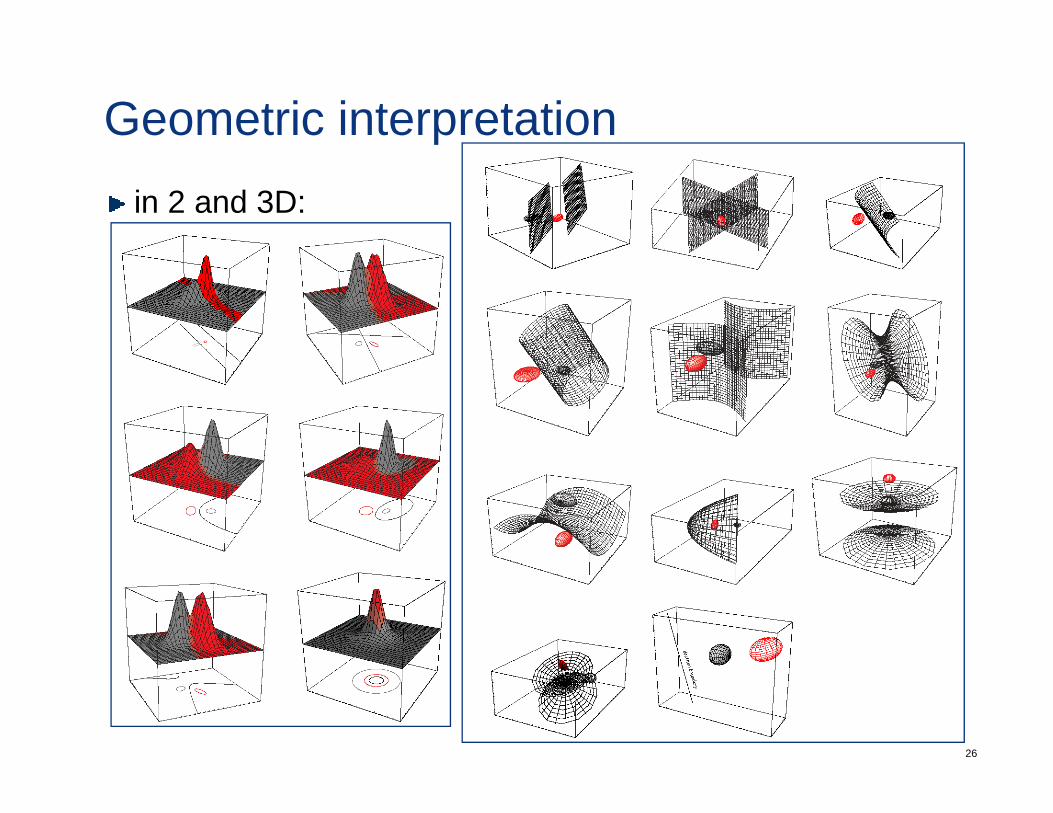
Geometric interpretationin 2 and 3D:
26
The sigmoidwe have derived all of this from the log-based BDR
[ ])(l)|(l)(* iPixPxi
h th l t l it i l i t ti t
[ ])(log)|(logmaxarg)( | iPixPxi YYXi
+=
when there are only two classes, it is also interesting to look at the original definition
)(maxarg)(* xgxi i=
with
)(maxarg)( xgxi ii
=
)()|()|()( | YYX iPixP
xiPxg ==
)()|()(
)|()(
|
|
YYX
XXYi
iPixPxP
xiPxg ==
27
)1()1|()0()0|()()|(
||
|
YYXYYX
YYX
PxPPxP +=
The sigmoidnote that this can be written as
)(maxarg)(* xgxi = 1)(maxarg)( xgxi ii
=
)0()0|()1()1|(
1
1)(|
0YYX
PxPPxPxg
+=
)(1)( 01 xgxg −=
and, for Gaussian classes, the posterior probabilities are
)0()0|(| YYX PxP)(1)( 01 xgxg
{ }1011000 )()(exp1
1)(ααµµ −+−−−+
=xdxd
xg
where, as before, )()(),( 1 yxyxyxd iT
i −Σ−= −
28
)(log2)2log( iPYid
i −Σ= πα

The sigmoidthe posterior
1)(g
is a sigmoid and looks like this
{ }1011000 )()(exp1
)(ααµµ −+−−−+
=xdxd
xg
is a sigmoid and looks like thisdiscriminant:P (C1|x ) = 0.5
29
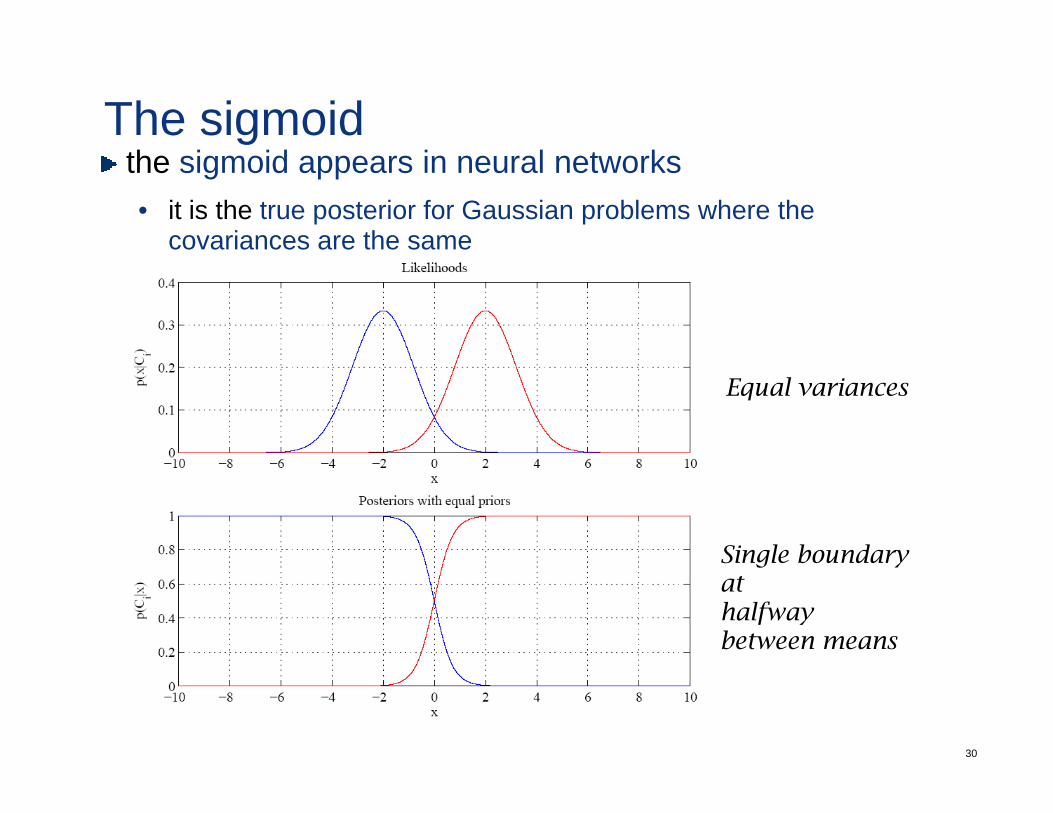
The sigmoidh i id i l kthe sigmoid appears in neural networks• it is the true posterior for Gaussian problems where the
covariances are the same
Equal variances
Single boundary Single boundary athalfway between means
30
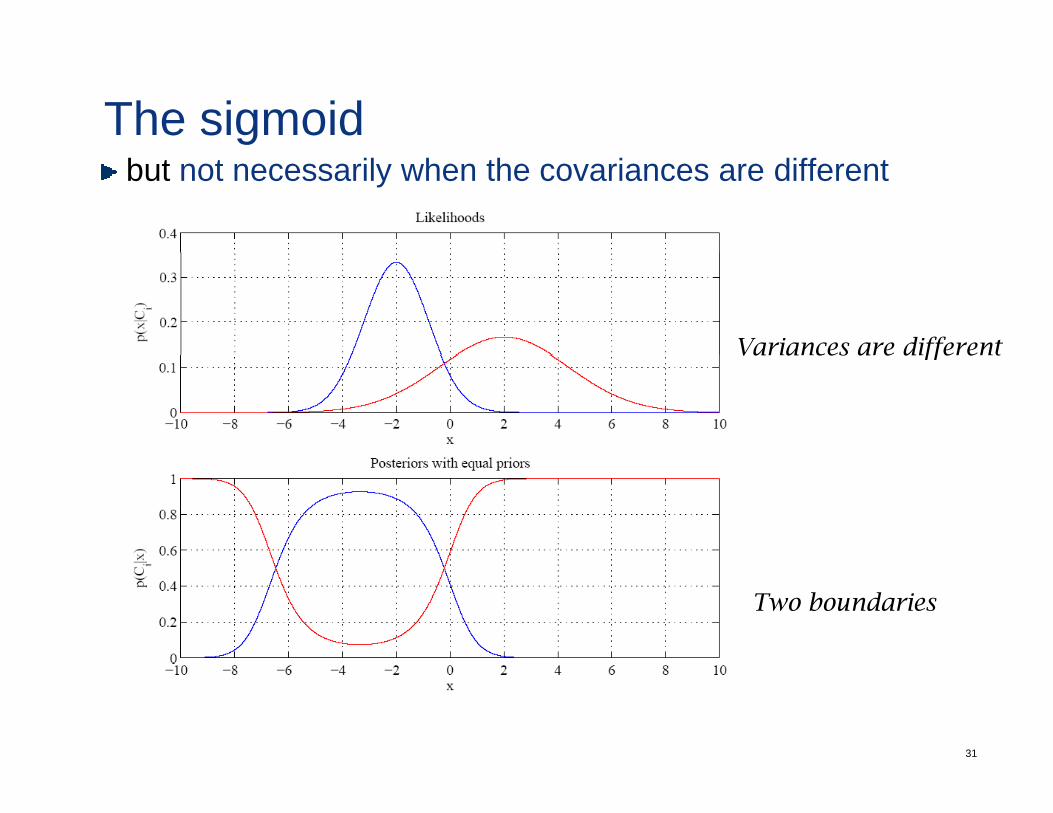
The sigmoidbut not necessarily when the covariances are different
Variances are differentVa a ces a e d ffe e t
Two boundaries
31
Bayesian decision theoryadvantages:• BDR is optimal and cannot be beatenBDR is optimal and cannot be beaten• Bayes keeps you honest• models reflect causal interpretation of the problem, this is how we
think• natural decomposition into “what we knew already” (prior) and
“what data tells us” (CCD)• no need for heuristics to combine these two sources of info• BDR is, almost invariably, intuitive
B l h i l d i li ti bl d l it• Bayes rule, chain rule, and marginalization enable modularity, and scalability to very complicated models and problems
problems:
32
p• BDR is optimal only insofar the models are correct.

33