
Teoria de Maquinas y Mecanismo - Shigley
508
r ¿.;.( , TEORlA DE MÁQUINAS Y MECANISMOS
-
Upload
juan-antonio-herrera-zamora -
Category
Documents
-
view
2.278 -
download
3
Transcript of Teoria de Maquinas y Mecanismo - Shigley

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 1/508
r¿.;.( ,TEORlA DE MÁQUINAS Y MECANISMOS
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 2/508
TRADUCCION:Jng. Hortensia C. de ContinUniversidad de BerkeleyREVISION TÉCNICA:José H. Pérez CastellanosIngeniero Industrial
Profesor Titularen la ESIME, I.P.N.TEORíADE MÁQUINASY MECANISMOSJ oseph Edward ShigleyProfessor Emerítus of Mechanícal EngineeringThe University of MichiganMcGRAW-HILLJohn Joseph Uicker Jr.Professor of Mechanical EngineeringUniversity of Wisconsin, Madison
MÉXICO - BUENOS AIRES - CARACAS - GUATEMALA -USBOA. MAORIO_ NUEVA YORKSAN JUAN_ SANTAFÉ DE BOGOTÁ_ SANTIAGO_ sAo PAULO. AUCKLANDLONDRES. MILÁN. MONTREAle NUEVA DElHI _ SAN FRANCISCO _ SINGAPURSTo LOUIS. SIDNEY _ TORONTO
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 3/508
71(,'0TEORIA DE MAaUINAS y MECANISMOSProhibida la reproducción total o parcial de esta obra,por cualquier medio. sin autorización escrita del editor.DERECHOS RESERVADOS 1988. respecto a la primera edición en español porMcGRAW-HILL/INTERAMERICANA DE MEXICO, S.A. DE C.V.
Atlacomulco 499-501, Fracc. Industrial San Andrés Atoto53500 Naucalpan de Juárez. Edo. de MéxicoMiembro de la Cámara Nacional de la Industria Editorial. Reg. Núm. 1890ISBN 968·451·297·XTraducido de la primera edición en inglés deTHEORY OF MACHINES ANO MECHANISMSCopyrigt h © MCMLXXX, by McGraw-Hi l l Book Co., U. S. A.ISBN 0-07-056884-722013456789 F.I.-82Impreso en MéxicoEsta obra se termin6 deimprimir en Enero del 2001 en
Litográfica ingramexCenteno Núm. 162-1Col. Granjas EsmeraldaDelegación Iztapalapa09810 México, O_F.Se tiraron 1.000 ejemplares09876543201Printed in Mexico

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 4/508
Capítulo 1Capítulo 2Capítulo 3CONTENIDOPrefacioGeometria del movimiento
1-1 introducción 1-2 Análisis y sintesis 1-3 Ciencia de la mecánica1-4 rerminología. definiciones e hipótesis 1-5 Mecanismos planoses féricos y espaciales 1-6 Movilidad 1-7 Inversi4m cinemática 1-8Ley de Grashof 1-9 Ventaja mecánica 1-10 Curvas del acoplador1-11 Mecanismos de linea recta 1-12 Mecanismos de retornorápidoPosición y desplazamiento2-1 Sistemas de coordenadas 2-2 Posición de un punto2-3 Diferencia de posición entre dos puntos 2-4 Posición aparente deun punto 2-5 Posición absoluta de un punto 2-6 Ecuación decierre del circuito 2-7 Análisis gráfico de la posició.n mecanismos planos 2-8 Soluciones de álgebra compleja de
ecuaciones vectoriales en el plano 2-9 Soluciones de Chace paraecuaciones vectoriales en el plano 2-10 Análisis algebraico de laposición de eslabonamientos planos 2-11 Desplazamiento de unpunto en movimiento 2-12 Diferencia de desplazamientos entredos puntos 2-13 Rotación y translación 2-140 Desplazamientoaparente 2-15 Desplazamiento absolutoVelocidad3-1 Definición de velocidad 3-2 Rotación de un cuerpo rigido3-3 Diferencia de velocidades entre puntos del mismo cuerpo rlgido3-4 Análisis gráfico de la velocidad; poligonos de velocidades3-5 Velocidad aparente de un punto en un sistema de coordenadas enXl29
74

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 5/508
VI CO:'llU::'IilDOCapítulo 4Capítulo 5Capitulo 6Capítulo 7movimiento 3-6 Velocidad angular aparente 3-7 Contacto directo
y contacto por rodadura 3-8 Análisis de la velocidad utilizandoálgebra compleja 3-9 Análisis de la velocidad mediante álgebravectorial 3-10 Centro instantáneo de velocidad 3-11 Teorema deAronhold-Kennedy de los tres centros 3-12 Localización decentros instantáneos de velocidad 3-13 Análisis de la velocidadusando centros instantáneos 3-14 Teorema de la razón develocidades angulares 3-15 Teorema de Freudenstein 3-16 Índicesde mérito; v entaja mecánica 3-17 CentrodasAceleración4-1 Definición de aceleración 4-2 Aceleración angular de uncuerpo rígido 4-3 Diferencia de aceleraciones entre puntos de uncuerpo rígido 4-4 Análisis gráfico de la aceleración; polígonos de
aceleraciones 4-5 Aceleración aparente de un punto en un sistemade coordenadas en movimiento 4-6 Aceleración angular aparente4-7 Contacto directo y contacto por rodadura 4-8 Métodosanalíticos del análisis de la aceleración 4-9 Centro instantáneo deaceleración 4-10 Ecuaciones de Euler-Savary 4-11 Construccionesde Bobillier 4-12 Cúbica de curvatura estacionariaMétodos numéricos en el análisis cinemático5-1 Introducción 5-2 Programación de una calculadoraelectrónica 5-3 Programación de las ecuaciones de Chace 5-4 Unprograma de computadora para mecanismos planos5-5 Programas generalizados para análisis de mecanismosDisefio de levas6-1 Clasificación de las levas y los seguidores 6-2 Diagramas
desplazamientos 6-3 Diseño gráfico de perfiles de levas6-4 Derivadas del movimiento del seguidor 6-5 Levas de granvelocidad 6-6 Movimientos estándar de las levas 6-7 Igualación delas derivadas de los diagramas de desplazamientos 6-8 Diseñopolinomial de levas 6-9 Leva de placa con seguidor oscilante decara plana 6-10 Leva de placa con seguidor oscilante con rodilloEngranes rectos o cilíndricos7-1 Terminología y definiciones 7-2 Ley fundamental delengranaje 7-3 Propiedades de l:¡ involuta 7-4 Engranesintercambiables; Normas AGMA 7-5 Fundamentos de la acciónde los dientes de engranes 7-6 Formación de los dientes deengranes 7-7 Interferencia y socavación 7-8 Razón de contacto
7-9 Variaci6n de la distancia entre centros 7-10 Involuciones7-11 Dientes no estándar de engranes 7-12 El perfIl cicloidal130178204258

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 6/508
CONTENIDO VIICapitulo 8 Engranes helicoidales, de gusano y cónicos 3008- 1 Engranes helicoidales de ejes paralelos8-2 Relaciones entre los dientes de engranes helicoidales 8-38-3 Proporciones de los dientes en los engranes helicoidales8-4 Contacto de los dientes en los engranes helicoidales 8-5 Engranes
de espina de pescado 8-6 Engranes helicoidales de ejes cruzados8-7 Engranaje de gusano 8-8 Engranes cónicos de dientes rectos8-9 Proporciones de los dientes en los engranes cónicos 8-10-8-10 Corona dentada y engranes de cara 8-11 Engranes cónicosespirales 8-12 Engranes hípoidalesCapítulo 9 Trenes de mecanismos 3259-1 Trenes de engranes de ejes paralelos y definiciones9-2 Ejemplos de trenes de engranes 9-3 Determinación del número dedientes 9-4 Trenes de engranes epicíclicos 9-5 Trenes epicíclicosde engranes cónicos 9-6 Solución de trenes planetarios mediantefórmula 9-7 Análisis tabular de trenes planetarios 9-8Diferenciales
Capítulo 10 Síntesis de eslabonamientos 34310- 1 Sintesis del tipo, del número y dimensional 10-2 Generaciónde la función, generación de la trayectoria y guia del cuerpo10-3 Posiciones de presición; espaciamiento de Chebychev10-4 Síntesis de posición del mecanismo general de corredera y manivela10-5 Síntesis de mecanismos de manivela y oscilador10-6 Mecanismos de manivela-oscilador con ángulo óptimo detransmisión 10-7 Síntesis de tres posiciones 10-8 Reducción de laposición del punto; cuatro puntos de presición 10-9 Método dela figura sobrepuesta 10-10 Síntesis de la curva del acoplador10- 11 Eslabonamientos afines; teorema de Roberts-Chebychev10-12 Síntesis analítica utilizando álgebra compleja 10-13 Ecuaciónde Freudenstein 10-14 Sintesís de los mecanismos de dretención
10-15 Movimiento rotatorio intermitenteCapítulo 11 Mecanismos espaciales 38211-1 Introducción a los eslabonamientos espaciales11-2 Mecanismos especiales 11-3 Problemas de la posición1 1-4 Análisis de la posición del mecanismo RGGR 11-5 Análisi de lavelocidad y la aceleración del eslabonamiento RGGR11-6 Ángulos eulerianos 11-7 Un teorema sobre velocidades yaceleraciones angulares 11-8 Articulación universal de HookeCapítulo 12 Fuerzas estáticas 40912-1 Introducción 12-2 Sistemas de unidades 12-3 Fuerzasaplicadas y de restricción 12-4 Condiciones para el equilibrio
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 7/508
VIII CONTENIDO12-5 Diagramas de cuerpo libre 12-6 Programas del cálculo12-7 Elementos de dos y tres fuerzas 12-8 Elementos de cuatro fuerzas12-9 Análisis de fuerzas en engranes rectos y helicoidales12-10 Engranes cónicos rectos 12-11 Modelos de fuerza de fricci6n12-12 Análisis de fuerzas estáticas con fricción
Capítulo 13 Fuerzas dinámicas13-1 Análisis de fuerzas en cuerpos rigidos y elásticos13-2 Centroides y centros de masa 13-3 Momento de inercia13-4 Fuerzas de inerci3. y el principiO de D' Alembert 13-5 Principio desuperposición 13-6 Un ejemplo de análisis gráfico 13-7 Rotaciónalrededor de un centro fijo 13-8 Medición del momento deinercia 13-9 Análisis de un mecanismo de cuatro barras _ 13-10 Fuerzas y momentos de sacudimiento 13-11 Análisis .porcomputadoraCapítulo 14 Dinámica de los motores de pistones14-1 Tipos de motores 14-2 Diagramas del indicador14-3 Análisis dinámico; generalidades 14-4 Fuerzas de los gases
14-5 Masas equivalentes 14-6 Fuerzas de inercia 14-7 Cargas sobre loscojinetel', en el motor de un solo cilindro 14-8 Momento detorsión del cigüeñal 14-9 Fuerzas de sacudimiento del motor 14-14-10 Sugerenéias acerca de los cálculos de maquinas porcomputadoraCapítulo 15 Balanceo15-1 Desbalanceo estático 15-2 Ecuación del movimiento15-3 Máquinas de balanceo estático 15-4 Desbalanceo dinámico15-5 Análisis del desbalanceo 15-6 Balanceo dinámico 15-7 Balanceo.¡;le máquinas 15-8 Balanceo de campo con la calculadoraprogramable 15-9 Balanceo del motor de un solo cilindro15-10 Balan..eo de motores con varios cilindros 15-11 Balanceo deeslabonamientos 15-12 Balanceo de máquinas
Capítulo 16 Dinámica de las levas16-1 Sistemas de levas de cuerpos rígidos y elásticos 16-2 Análisis deuna leva excéntrica 16-3 Efecto de la fricción de deslizamiento16-4 Análisis de una leva de disco con seguidor oscilante derodillo 16-5 Programación para soluciones en computadora ocalculadora 16-6 Análisis de sistemas elásticos de levas16-7 Desbalanceo, sobretensión del resorte y arrolladoCapítulo 17 Dinámica de máquinas17-1 Volantes 17-2 Giróscopos 17-3 Reguladores automáticos17-4 Medición de la respuesta dinámica 17-5 Cimentaciones paramáquinas448
480509554571

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 8/508
CONTENIDO IXRespuestas de problemas selectos 590Apéndice 595Tabla ¡ Prefijos estándar del SI Tabla 2 Conversión deunidades usuales en E.U. a unidades del SI Tabla 3Conversión de unidades usuales en E.U. a unidades del SI Tabla 4
Propiedades de áreas Tabla 5 Momentos de inercia de masasTabla 6 Funciones de ¡nvoíutaÍndice 603
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 9/508
PREFACIOEl propósito de este libro es presentar una exposición que abarque ese campode la teoría, el análisis, el diseño y la práctica de la ingeniería que generalmentese describe bajo el encabezado de mecanismos y cinemática y dinámica demáquinas. Aunque esta obra se escribió primordialmente para estudiantes de ingeniería,
contiene mucho material de gran valor para ingenieros que ya ejercensu profesión. Después de todo, un buen ingeniero sabe que seguirá siendo unestudiante en todo el desarrollo de su carrera profesional.El crecimiento continuo e impresionante de los conocimientos sobre cinemáticay dinámica de las máquinas en la década pasada ha venido a reforzarel programa de estudios de ingeniería en muchas escuelas mediante la substituciónde temas más débiles con éstos más sobresalientes, y generó la necesidadde un libro de texto para satisfacer los requisitos de estas nuevas estructurasdecursos. Gran parte de estos conocimientos nuevos existe en una amplia variedadde publicaciones técnicas, en las que aparecen con su singular lenguaje y nomenclatura
propios, requiriendo cada uno de ellos de conocimientos previospara su comprensión. Se pueden usar estas contribuciones individuales parareforzar la estructura del curso de ingeniería, proporcionando los fundamentosnecesarios y estableciendo una notación y nomenclatura comunes. Estos nuevosdesarrollos se pueden integrar después al cuerpo de conocimientos ya existente,con el propósito de ofrecer un estudio lógico, moderno y de mayor extensión.En resumen, este es el objetivo de la presente obra.Con el fin de desarrollar una comprensión amplia y básica, se empleantodos los métodos de análisis y desarrollos comunes a las publicaciones asociadascon el tema. Hemos utilizado con amplitud los métodos gráficos deanálisis y síntesis en todo el libro porque estamos convencidos de que el cálculográfico es básico y fácil de ensefíar. Además. casi siempre resulta el métodomás rápido para verificar los resultados del cálculo de máquinas. También s
usan el análisis vectorial convencional y el método de Chase del análisis vectorial,en razón de su brevedad, porque se emplean con gran frecuencia en mucha"publicaciones de investigación y debido a que se prestan enormemente para

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 10/508
XIIprogramar los análisis en computadora. Por las mismas razones, se usa elmétodo de Raven, sobre todo en los capítulos básicos. Por último, en toda laobra se usan de manera irrestricfa los métodos de números complejos, tantopolares como rectangulares, al igual que los algebraicos.Con ciertas excepciones, nos hemos esforzado por usar unidades inglesas y
del SI en casi la misma proporción. El Sistema Internacional de Unidades (SI)se presenta y utiliza en este libro obedeciendo las reglas y las recomendaciones sugeridas en la publicación especial 330 de la Oficina Nacional de Estándares(National Bureau of Standards), revisada en agosto de 1977.Uno de los dilemas a los que se enfrentan todos los escritores de este temaes la manera de distinguir entre el movimiento de dos puntos distintos sobre elmismo cuerpo en movimiento, y el de dos puntos diferentes sobre dos cuerposmóviles. Este dilema se presenta siempre con el problema del punto coincidenteen el que ocurren ambas clases de movimiento. En el pasado se acostumbrabadescribir a los dos movimientos como "movimiento relativo"; pero en vista deque existen dos clases, al estudiante le resulta difícil establecer una diferencia
clara entre ambos. Creemos que este problema ha quedado resuelto introduciendolos términos diferencia de movimientos y movimiento aparente. Por ende, ellibro contiene, por ejemplo, los términos diferencia de velocidades y velocidadaparente en lugar del término "velocidad relativa" que no se encontrará en absoluto. Este planteamiento se introdujo principiando con los conceptos deposición y desplazamiento, se usa en forma extensa en el capítulo que trata dela velocidad y se lleva a su culminación en el estudio del problema del puntocoincidente, en el capítulo de la aceleración, en donde se presenta la componentede Coriolis.El uso frecuente de los métodos de computación por medio de máquinas,sobre todo para los ingenieros en ejercicio, ha hecho necesaria la inclusión de
un capítulo sobre métodos numéricos. Las computadoras caseras y de oficinatal,s como las calculadoras programables y las microcomputadoras son tanútiles para resolver ciclos completos de movimiento que su uso ya es muy difundido.Además, los métodos de diseño computarizados con terminales depresentación gráfica que se utilizan en combinación con computadoras de grancapacidad, están demostrando tener un gran valor para la resolución de muchosproblemas complejos del análisis y síntesis de mecanismos y máquinas. En estey otros capítulos del libro en Jos que se examinan métodos de análisis COn computadora,tomamos precauciones especiales para evitar la presentación deprogramas y lenguajes de computadora específicos. La programación es un esfuerzo
intrínsecamente individual y la mayoría de la.s sus propios programas empleando un lenguaje de computadora de su preferencia.Por estas razones presentamos los pasos de programa necesarios para resolvermuchos problemas analíticos que ocurren a menudo, y se agregaron sugerenciasque creemos serán de gran utilidad. Un método de esta íno .... le nollegará a la bbsolescencia conforme las computadoras y los lenguajes usados enellas sufran los cambios esperados.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 11/508
XIIILos métodos de disefio de levas necesarios para producir un movimientoespecificado, y el comportamiento cinemática y dinámico de los sistemas delevas, se estudian en forma minuciosa aplicando métodos gráficos, analíticos yde computación en máquinas. También se presenta un nueva conjunto degráficas par.. el disefio de levas que acortan notablemente el tiempo requerido
para el diseño cinemático. Además, los métodos de análisis dinámico usadosfacilitan, por ejemplo, la elección de un resorte de retención del seguidor paraevitar que éste salte o se levante y para calcular las fuerzas sobre los cojinetes del eje de las levas y de contacto.El análisis cinemático y dinámico de los engranes y trenes de engranes setrata de una manera minuciosa. Las doce variaciones de Lévai y su notación,que se incluyen aquí, tienen una utilidad particular para el análisis de trenesplanetarios.Las publicaciones de investigaciones referentes al disefio o la síntesis deeslabonamientos para fines específicos son tan numerosas que una personarequeriría muchos meses para compendiarlas todas. Creemos que el capítulo 10,
Síntesis de eslabonamientos, contiene suficientes técnicas como para que cualquieraresuelva la mayor parte de los problemas de síntesis que se presentan enla ingeniería; se aplican tanto métodos gráficos como analíticos. Se analiza conamplitud la síntesis de posición y trayectoria de los mecanismos de correderamanivelay de manivela-oscilador.El capítulo sobre mecanismos espaciales contiene todo el material necesariopara una introducción completa del tema y sus problemas. De hecho, losproblemas tridimensionales constituyen una extensión natural y obvia para ellector, y no un caso especial. Se usan métodos gráficos y analíticos en elanálisis cinemático de la posición, la velocidad y la aceleración en esta clase demecanismos.Los dos capítulos que se ocupan del análisis de estática y dinámica de las
fuerzas en sistemas de máquinas definen la terminología y los métodos empleadosen los capítúlos restantes de esta obra. Los métodos de computación,gráficos, vectoriales y de máquina, se aplican en proporciones más o menosi..uales. Estos capítulos incluyen material sobre el concepto de momento deinercia de una masa y su medición experimentat. Aunque la mayoría de los lec-'tores ya habrán tenido previamente alguna introducción al concepto de momentode inercia, la experiencia didáctica ha demostrado que es importante hacerhincapié en este tema durante el estudio de la dinámica.También es importante incluir material sobre la dinámica de los motores depistones en el curso de un estudio de dinámica de las maquinarias. El mecanismode los motores es un ejemplo simple y apropiado acerca de la necesidad del
análisis de las fuerzas sobre cojinetes y correderas, y la exigencia de balancearlos sistemas de máquinas y sus componentes, así como de 'usar volantes en lasmáquinas.El estudio del balanceo se inicia con una explicación de las causas y losefectos de un desequilibrio rotatorio junto con un breVe análisis del balanceo de

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 12/508
XIVlas máquinas. El problema del balanceo de campo de dos planos para rotoresgrandes se analiza detalladamente porque constituye un ejemplo excelente deproblemas que pueden resolverse mediante una calculadora programable. Elbalanceo de motores de uno y varios cilindros se explica utilizando el métodode masa imaginaria o rotor imaginario. El volumen de las publicaciones referente
sal balanceo de eslabonamientos, como por ejemplo el mecanismo decuatro barras, es tan grande que es difícil hacer una selección totalmente' satisfactoria.Decidimos presentar el método de Berkof-Lowen para balanceareslabonamientos, en virtud de que es bastante general, completo y se puedeaplicar a cualquier sistema de eslabonamiento y porque emplea los fundamentosque ya se introdujeron en el libro, El problema del balanceo de fuerzas demáquinas completas, así como el del momento de sacudimiento, se estudiantambién en el capítulo sobre balanceo.Nos sentimos profundamente agradecidos por la colaboración prestada porlos profesores George N. Sandor de la Universidad de Florida, Sanjay G.
Dhande de la misma universidad, Dennis A. Guenther de la Universidad Estatalde Ohio. Glenn C. Tolle de la Universidad A & M de Texas. Robert A. Lucasde la Universidad Lehigh, Edward N. Stevensen, Jr., de la Universidad de Hartfordy Robert J. Williams de la Universidad Estatal de Pennsylvania, durantela planeacíón y revisión de este libro, y por su asesoría en el manuscrito y bosquejopreliminares. Sus análisis críticos y comentarios cuidadosos nos ayudaronenormemente a organizar los métodos y el contenido de esta obra.El manuscrito final fue revisado con todo detalle por los profesores RobertW. Adamson de la Universidad Politécnica Estatal de California, FerdinandFreudenstein de la Universidad de Columbia y Edward N. Stevensen, Jr., de laUniversidad de Hartford. Nos sentimos sumamente reconocidos por el tiempo yesfuerzo invertidos por estas personas para ayudarnos a darle el toque final al
manuscrito.Por último, deseamos expresar nuestra gratitud imperecedera a nuestraeditora, Julienne V. Brown, porque el entusiasmo y la buena voluntad de estadama que estuvo dispuesta siempre a recorrer la segunda milla para ayudarnosa resolver los problemas más dificiles, es algo que apreciamos sinceramente.foseph Edward Shigleyfohn foseph Uicker, fr.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 13/508
CAPiTULOUNOGEOMETRÍA DEL MOVIMIENTO1-1 INTRODUCCIÓNLa teoría de los mecanismos y las máquinas es una ciencia aplicada que sirve paracomprender las relaciones entre la geometría y los movimientos de las piezas de
una máquina o un mecanismo, y las fuerzas que generan tales movimientos. Eltema y, por ende, esta obra, se divide naturalmente en tres partes. Los capitulos 1al 5 se refieren a la cinemática, que es el análisis de los movimientos de las piezasde las máquinas. Esto constituye la base para los capítulos 6 a 1 1 en donde se estudianmétodos de diseí'io de mecanismos y componentes de máquinas. Por último,los capitulos 12 a 17 se ocupan del estudio de la cinética, las fuerzas en las máquinasque varían en el tiempo y los fenómenos dinámicos resultantes que debenconsiderarse en su diseí'io.
Como se ilustra en la figura 1- 1, el diseí'io de una máquina moderna es amenudo muy complejo. Por ejemplo, para diseí'iar un nuevo motor, el ingeniero enautomovilismo debe dar respuesta a muchas preguntas interrelacionadas. ¿Cuál esla relación entre el movimiento del pistón y el del cigüeí'ial? ¿Cuáles serán lasvelocidades de deslizamiento y las cargas en las superficies lubricadas y qué lubricantesexisten para este fin? ¿Qué cantidad de calor se generará y cómo se enfriaráel motor? ¿Cuáles son los requisitos de sincronización y control, y cómo sesatisfarán? ¿Cuál será el costo para el consumidor, tanto por lo que respecta a lacompra inicial como en lo referente al funcionamiento y mantenimiento continuos? ¿Qué materiales y métodos de fabricación se emplearán? ¿Qué economía decombustible se tendrá? ¿Cuál será el ruido y cuáles las emisiones de salida o escape?
¿Satisfarán estos últimos los requisitos legales? Aunque éstas y muchas otraspreguntas importantes se deben responder antes de que el diseí'io llegue a su etapa

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 14/508
1 TEoRíA DE MÁQUINAS Y MECANISMOSFigura 1-1 Una grua flotante Figee con una pluma con configuración de lemniscata (B. V Machine-fabriek Figee. Haarlem, Holanda.)final, es obvio que no todo se puede incluir en un libro de esta magnitud. Así como
es necesario reunir personas de las más diversas especialidades para producir undiseño adecuado, también es preciso hacer acopio de muchas ramas de la ciencia.Este libro reúne material perteneciente a la ciencia de la mecánica en lo que serefiere a su relación con el diseño de mecanismos y máquinas.1-2 ANÁLISIS Y SíNTESISEl diseño y el análisis son dos aspectos completamente distintos en el estudio de lossistemas mecánicos. El concepto comprendido en el término "diseño" podríallamarse más correctamente sin tesis , o sea, el proceso de idear un patrón o métodopara lograr un propósito dado. Diseño es el proceso de establecer tamaños, formas,composiciones de los materiales y disposiciones de las piezas de tal modo quela máquina resultante desempeñe las tareas prescritas.
Aunque existen muchas fases dentro del proceso del diseño que es factibleplantear de un modo científico y bien ordenado, el proceso en conjunto es por supropia naturaleza, tanto un arte como una ciencia. Requiere imaginación, intui-
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 15/508
GEOMETRíA DEL MOVIMIENTO 3ción, creatividad, sentido común y experiencia. El papel de la ciencia dentro delproceso de disefio sirve sencillamente para proveer las herramientas que utilizaránlos diseñadores para poner en práctica su arte.Es precisamente en el proceso de evaluación de varias alternativas interactuantes
que los diseñadores se enfrentan a la necesidad de un gran número de instrumentosmatemáticos y científicos. Cuando éstos se aplican en forma correctaofrecen información más exacta y digna de confianza para juzgar un disefio que sepueda lograr a través de la intuición o el cálculo. Por ende, suelen constituir unauxiliar extraordinario para decidir entre varias alternativas. Sin embargo, las herramientas cientificas no pueden tomar decisiones suplantando a los disefiadores;éstos tienen todo el derecho de poner en práctica su imaginación y capacidadcreativa, induso al grado de pasar por encima de las predicciones matemáticas.Es probable que el conjunto más abundante de métodos científicos de que disponeel disefiador quede dentro de la categoría denominada análisis. Se trata de
técnicas que permiten que el disefiador examine en forma critica un disefio ya existenteo propuesto con el fin de determinar si es adecuado para el trabajo de que setrate. Por ende, el análisis, por si solo, no es una ciencia creativa sino más biendeevaluaciÓn y clasificación de cosas ya concebidas.Es preciso tener siempre en mente que aunque la mayor parte de los esfuerzosrealizados se dediquen al análisis, la meta real es la síntesis, es decir, el diseño deuna máquina o un sistema. El análisis es una simple herramienta y, sin embargo, estan vital que se usará inevitablemente como uno de los pasos en el proceso dediseño.1-3 CIENCIA DE LA MECÁNICA.
Mecánica es la rama del análisis cientifico que se ocupa de. los movimientos, eltiempo y las fuerzas, y se divide en dos partes, estática y ..inámica. La estáticatrata del análisis de sistemas estacionarios, es decir, de aquellos en que el tiempono es un factor determinante. y la dinámica se refiere a los sistemas que cambiancon el tiempo.Como se ilustra en la figura 1-2. la dinámica también está constituida por dosdisciplinas generales que Euler fue el primero en reconocer como entidades separadas,en 1775:tLa investigación del movimiento dt. un cuerpo rigido se puede separar de manora conveniente en
dos partes, una geométrica y la otra mecánica. En la primera de ellas, se debe investigar la.transferenciadel cuerpo de una poskión dada a cualquier otra sin hacer mención de las cauSas delmovimiento, y es preciso representarla mediante f6rmulas ana\iticas, las que definirán la p'dIici6nt NOVl comment, Acall. Petrop., vol. lO, 177S; también en "1beoria motus corporum", 1790. Latraducción fue realizada por Wilüs, "Principies of Mechanism", la. ed. p. viii, 1870.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 16/508
4 TEORÍA DE MÁQUINAS Y MECANISMOSEstática L Dirlámica ]..I Cinemática Cinéti...... Figura 1-2de cada punto del cuerpo. Por lo tanto, esta investigación se referirá exclusivamente a la geometriao, más bien, a la estereotomía.
Es evidente que mediante la separación de esta parte de la cuestión, de la otra, quepertenecemás bien a la Mecánica, la determinación del movimiento basada en principios dinámicos sefacilitará de una manera más notable que si ambas partes se consideraran en forma conjunta.Estos dos aspectos de la dinámica se reconocieron posteriormente como lasciencias diferentes denominadas cinem ática (del vocablo griego kinema, que significamovimiento) y cinética que se ocupan, respectivamente, del movimiento y delas fuerzas que lo producen.El problema inicial en el diseño de un sistema mecánico es, por consiguiente,
la comprensión de su cinemática. Cinem ática es el estudio del movimiento, independientementede las fuerzas que lo producen. De manera más especifica, lacinemática es el estudio de la posición, el desplazamiento, la rotación, la rapidez,la velocidad y la aceleración. El estudio del movimiento planetario u orbital, póngasepor caso, constituye también un problema de la cinemática; pero este libro seconcentrará en los aspectos cinemáticos que surgen en el diseño de sistemas mecánicos.Como consecuencia, la cinemática de las máquinas y los mecanismos es elfoco de atención de los siguientes capítulos de este texto. No obstante, la estática y la cinética son también partes vitales de una análisis de diseño completo, y se tocarántambién en capítulos posteriores.
Es preciso observar con cuidado en la cita anterior, que Euler basó su divisiónde la dinámica en cinemática y cinética basándose en la suposición de que debentratar con cuerpos rígidos. Esta es una suposición de gran importancia que permiteque ambos aspectos se traten por separado. En el caso de cuerpos flexibles las formasmismas de los cuerpos y, por ende, sus movimientos, dependen de las fuerzasejercidas sobre ellos. En tal situación, el estudio de la fuerza y el movimiento sedebe realizar en forma simultánea, incrementando notablemente con ello la complejidaddel análisis.Por fortuna, aunque todas las piezas de máquinas reales son flexibles en cierto
grado, éstas se diseñan casi siempre con materiales más o menos rígidos y manteniendoen un rnínimó sus deformaciones. Por lo tanto, al analizar el funcionamientocinemáticó de una máquina es práctica común suponer que las deflexionesson despreciables y que las piezas son rígidas, y luego, una vez que se harealizado el análisis dinámico, cuando las cargas se conocen, se suele diseñar laspiezas de manera que esta suposición se justifique.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 17/508
GEOMETRíA DEL MOVIMIENTO 51-4 T ERMINOLOGíA, DEFINICIONES E HIPÓTESISReuleauxt define una máquina:f; como una "combinación de cuerpos resistentes detal manera que, por medío de ellos, las fuerzds mecánicas de la naturaleza sepueden encauzar para realizar un trabajo acompaftado de movimientos determinados."
También define mecanismo como una "combinación de cuerpos resistentesconectados por medio de articulaciones móviles para formar una cadenacinemática cerrada con un eslabón fijo, y cuyo propósito es transformar el movimiento. " Se puede arrojar más luz sobre estas definiciones contrastándolas con el términoestructura, que es también una combinación de cuerpos (rigidos) resistentesconectados por medio de articulaciones, pero cuyo propósito no es efectuar untrabajo ni transformar el movimiento. Una estructura (como por ejemplo, una armadura)tiene por objeto ser rigida; tal vez pueda moverse de un lado a otro y, eneste sentido es móvil; pero carece de movilidad interna, no tiene movimientosrelativos entre sus miembros, mientras que tanto las máquinas como los mecanismos
los tienen. De hecho, el propósito real de una máquina o un mecanismo esaprovechar estos movimientos internos relativos para transmitir potencia o transformarel movimiento.Una máquina es una disposición de partes para efectuar trabajo, un dispositivopara aplicar potencia o cambiar su dirección; difiere de un mecanismo en supropósito. En una máquina, los términos fuerza, momento de torsión (o parmotor), trabajo y potencia describen los conceptos predominantes. En un mecanismo,aunque puede transmitir la potencia de una fuerza, el concepto predominanteque tiene presente el diseñador es lograr un movimiento deseado. Existe unaanalogía directa entre los términos estructura, mecanismo y máquina, y las tresramas de la mecánica especificadas en la figura 1-2. El término "estructura" es a
la estática lo que el término "mecanismo" es a la cinemática y el término "máquina"es a la cinética.Aquí se usará la palabra eslabón para designar una pieza de una máquina o uncomponente de un mecanismo. Como se explicó en la sección anterior, se suponeque un eslabón es completamente rigido. Los componentes de máquinas que no seadaptan a esta hipótesis de rigidez, como por ejemplo, los resortes, no tienen por lo común efecto alguno sobre la cinemática de un dispositivo, aunque si desempeñanun papel en la generación de fuerzas. Estos elementos no se llaman eslabonesy casi siempre se ignoran durante el análisis cinemático y sus efectos de fuertGran parte del material de esta sección se basa en defmiciones estipuladas originalmente por F.
Reuleaux (1829-1905), especialista alemán en cinemática cuyo trabajo marcó el principio de un estudiosistemático de la cinemática. Para consultas adicionales, véase A. B. W. Kennedy, "Reuleaux' Kinematicsof Machinery", Macmillan, Londres, 1876; publicado nuevamente por Dover, Nueva York,1963.* No existe en realidad una coincidencia absoluta en la definición apropiada de máquina. En unanota al calce, Reuleaux propone 17 definiciones y su traductor sugiere otras siete, exponiendo minuciosamentetoda esta cuestión.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 18/508
6 TEORfA DE MÁQUINAS Y MECANISMOSza se introducen durante el análisis dinámico. En algunas ocasiones, como sucedeen el caso de una banda o cadena, puede suceder que un elemento de una máquinaposea rigidez unilateral, en cuyo caso se consideraría como eslabón en la tensión;pero no así en la compresión.Los eslabones de un mecanismo se deben conectar entre sí de una manera tal
que transmitan movimiento del impulsor, o eslabón de entrada, al seguidor, oeslabón de salida. Estas conexiones, articulaciones entre los eslabones, se llaman pares cinemáticos (o simplemente pares) porque cada articulación se compone dedos superficies pareadas, dos elementos, con cada superficie o elemento pareadoformando parte de cada uno de los eslabones articulados. Por ende, un eslabón sepuede definir también como la conexión rigida entre dos o más elementos de diferentespares cinemáticos.La suposición de rigidez, enunciada explicitamente, indica que no puede habermovimiento relativo (cambio de distancia) entre dos puntos arbitrariamente seleccionadosen el mismo eslabón. En particular, no cambian las posiciones relativas
de elementos pareados en cualquier eslabón; en otras palabras, el propósito de uneslabón es mantener una relación espacial constante entre los elementos de suspares.Como resultado de la hipótesis de rigidez, muchos de los detalles complicadosque presentan las formas reales de las piezas carecen de importancia cuando se estudiala cinemática de una máquina o un mecanismo. Por esta razón, una de lasprácticas más comunes es trazar diagramas esquemáticos muy simplificados quecontengan las características más importantes de la forma de cada eslabón como,por ejemplo, las ubicaciones relativas de los elementos del par, pero en los quesereduce casi al mínimo la geometría real de las piezas fabricadas. El mecanismo decorredera-manivela del motor de :ombustión interna, por ejemplo, se puede simplifi
carhasta llegar al diagrama esquemático que se muestra en la figura 1-4b parafines de análisis. Estas representaciones esquemáticas simplificadas son de granutilidad porque eliminan factores que tienden a generar confusiones y que notienen injerencia alguna en el análisis; dichos diagramas se emplean con granprofusión en esta obra. No obstante, tienen también la desventaja de que muestranuna semejanza muy limitada con el elemento real. Como resultado, pueden dar laimpresión de que representan sólo construcciones académicas y no maquinariasreales. Es preciso tener siempre presente que se pretende que estos diagramas simplificadossolo contengan la información mínima necesaria para que el tema encuestión no se oscurezca con todos los detalles sin importancia (para los fines de
lacinemática) o con lo complejo de las piezas reales de la máquina.Cuando varios eslabones están conectados móvilmente por medio de articulaciones,se dice que constituyen una cadena cinemática. Los eslabones que contienensólo dos pares dé conexiones de elementos se llaman eslabones binarios, losque tienen tres se clasifican como ternarios y así sucesivamente. Si cada eslabón de la cadena se conecta por lo menos con otros dos, ésta forma uno o más circuitoscerrados y, en tal caso, recibe el nombre de cadena cinemática cerrada; de no ser __ asi, la cadena se llama abierta. Cuando no se hace especificación alguna se supone

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 19/508
GEOMETRíA DEL MOVIMIENTO 7que la cadena es cerrada. Si ésta se compone totalmente de eslabones binarios escerrada simple; sin embargo, las cadenas cerradas comp uestas incluyen otroseslabones binarios y, en consecuencia, forman más de un solo circuito cerrado.Recordando la definición de Reuleaux de un mecanismo, es evidente que senecesita tener una cadena cinemática cerrada con un eslalTón fijo. Cuando se habla
de que un eslabón está fijo se da a entender que se elige como marco de referenciapara todos los demás eslabones, es decir, que los movimientos de todos los demáspuntos del eslabonamiento se medirán con respecto a ése en particular, ya que se leconsidera como fijo. En una máquina real, ese eslabón es casi siempre una plataforma o base estacionaria (o una cubierta rígidamente sujeta a dicha base), y sele denomina eslab ón marco o base. La cuestión de si este marco de referencia esverdaderamente estacionario (en el sentido de ser un marco de referencia inercial)no tiene importancia para el estudio de la cinemática; pero la adquiere en la investigaciónde la cinética, en donde deben considerarse las fuerzas. En cualquier caso,
una vez que se designa el marco de referencia (y se satisfacen otras condiciones), lacadena cinemática se convierte en un mecanismo y conforme el impulsor se muevepasando por varias posiciones denominadas fases, todos los demás eslabonesmanifiestan movimientos bien definidos con respecto al marco de referenciaelegido. Se usa el término cadena cinem ática para especificar una disposición particularde eslabones y. articulaciones, cuando no se ha especificado con claridadcuál eslabón se usárá como marco de referencia. Una vez que se estipula el eslabónde referencia, la cadena cinemática se convierte en mecanismo.Para que un mecanismo sea útil, los movimientos entre los eslabones nopueden ser completamente arbitrarios, éstos también deben restringirse para producir
los movimientos relativos adecua dos, los que determine el disefiador parael trabajo particular que se deba desarrollar. Estos movimientos relativos deseadosse obtienen mediante la elección correcta del número de eslabones y de los tipos dearticulaciones utilizados para conectarlos. ..Por consiguiente, esto lleva al concepto de que, además de las distancias entrearticulaciones sucesivas, la naturaleza de ellas y los movimientos relativos quepermitanson esenciales para determinar la cinemática de un mecanismo. Por estarazón es vital que se examine en forma minuciosa la naturaleza de las articulaciones,en términos generales y en forma particular, para varios de los tipos más
comunes.El factor de control que determina los movimientos relativos que permite unaarticulación dada es la forma que tengan las superficies o elementos pareados.Cada tipo de articulación posee sus propias formas caracteristicas para los elementosy cada una permite un tipo de movimiento específico, el cual es determinadopor las maneras posibles en que estas superficies elementales se pueden mover unaen relación con otra. Por ejemplo, la articulación de pasador o espiga de la figura1-3a tiene elementos cilíndricos y, suponiendo que los eslabones no se puedendeslizar en sentido axial, estas superficies permiten sólo un movimiento rotatorio.Por ende, una articulación de pasador deja que los dos eslabones conectados experi
mentenuna rotación relativa en torno al pasador central. De la misma manera,

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 20/508
8 TEORíA DE MÁQUINAS Y MECANISMOS(a) (b)(d)(e)Figura 1-3 Los seis pares inferiores: a) revoluta o giratorio, b) prismático, e) helicoidal, d) cilindrico,
e) esférico y j) plano.las demás articulaciones tienen sus propias formas de los elementos y sus propiosmovimientos relativos que les son característicos. Tales formas restringen el movimientototalmente arbitrario de dos eslabones no conectados a un tipo prescrito demovimiento relativo y constituyen las condiciones limitan tes o restricciones impuestasal movimiento del mecanismo.Es conveniente sefialar que, a menudo, las formas de los elementos suelen disfrazarsesutilmente, lo que las hace difíciles de reconocer. Por ejemplo, una articulaciónde pasador podria incluir un cojinete de agujas, de modo que las dos
superficies pareadas no se distingan como tales. Sin embargo, si los movimientos de los rodillos individuales carecen de interés, los movimientos permitidos por lasarticulaciones son equivalentes y los pares pertenecen al mismo tipo genérico. Por ende, el criterio para distinguir clases distintas de pares se basa en los movimientosrelativos que permiten y no necesariamente en las formas de los elementos, aunqueéstas suelen revelar indicios muy importantes. El diámetro del pasador usado (uotros datos dimensionales) tampoco tiene más importancia que las magnitudes yformas exactas de los eslabones conectados. Como se dijo con anterioridad, la
función cinemática de un eslabón es mantener una relación geométrica fija entrelos elementos del par. Del mismo modo, la única función cinemática de una articulacióno par es determinar el movimiento relativo entre los eslabones conec-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 21/508
GEOMETRtA DEL MOVIMIENTO 9tados. Todas las demás características se determinan por otras razones y no tienenimportancia en el estudio de la cinemática.Cuando se plantea un problema de cinemática, es necesario reconocer el tipode movimiento relativo permitido en cada uno de los pares, y asignarle algúnparámetro variable (o algunos parámetros variables) para medir o calcular el
movimiento. Se tendrán tantos parámetros de esta índole como grados de libertadtenga la articulación en cuestión, y se les conoce con el nombre de variables del par.De donde, la variable del par de una articulación de pasador será un solo ángulomedido entre rectas de referencia fijas en los eslabones adyacentes, mientras queun par esférico tendrá tres variables del par (todas ellas ángulos) para especificarsu rotación tridimensional.Reuleaux dividió los pares cinemáticos en s uperiores e inferiores , y a esta últimacategoría pertenecen los seis tipos prescritos que se analizarán a continuación.Reuleaux estableció diferencias entre las categorías haciendo notar que en los pares
inferiores, tales como la articulación de pasador, los elementos del par hacen contactoen una superficie, en tanto que en los superiores, como por ejemplo la conexiónentre una leva y su seguidor, el contacto entre las superficies elementales esen una línea o un punto. No obstante, como se consignó en el caso de un cojinetede agujas, este criterio puede ser engafioso. Es preferible observar característicasque establezcan una distinción en el movimiento relativo (o movimientos relativos) que permita la articulación.En la figura 1-3 se ilustran los seis pares inferiores. En la tabla 1-1 aparecen los nombres de los pares inferiores y los símbolos usados por Hartenberg y Denavit
tpara cada uno de ellos, junto con el número de grados de libertad y lasvariables del par correspondientes.El par giratorio o revoluta (Fig. 1-3a) sólo permite rotación relativa y, por consiguiente,posee un grado de libertad. Con frecuencia, este par se denomina articulaciónde pasador o de espiga.El par prismático (Fig. 1-3b) sólo permite movimiento relativo de deslizamiento y,por ende, se denomina casi siempre articulación ,de deslizamiento. Tambiénposee un solo grado de libertad.El par de tornillo o par he/icoidal (Fig. 1-3c) cuenta con un solo grado de libertad
porque los movimientos de deslizamiento y rotación están relacionados por elángulo de hélice de la rosca. Por tanto, la variable del par se puede elegircomo L\s o bien, L\O, pero no ambas. Nótese que el par de tornillo se convierteen una revoluta si el ángulo de hélice se hace cero, y en un par prismáticosi dicho ángulo se hace de 900 El par cilíndrico (Fig. 1-3d) permite tanto rotación angular como un movimientode deslizamiento independiente. Por consiguiente, el par cilindrico tiene dosgrados de libertad.t R. S. Hartenberg y J. Denavit, Kinematic Synthesis 01 Linkages, McGraw-Hill, New York, 1964.Este libro es una obra clásica sobre cinética y el título es hasta cierto punto engañoso; también comprendeuna cantidad considerabl-:: de material acerca de la historia, la teoría y el anális
is cinemáticos.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 22/508
10 TEORtA DE MÁQUINAS Y MECANISMOSTabla 1·1 Pares inferioresVariable Grados dePar Símbolo del par libertadRevoluta R IH IPrisma P As I
Tornill o S AH o AS 1Cilindro e AfJ y As 2Esfera G A6.A<f>.AI/f 3Plano F Ax,Ay,A6 3MovimientorelativoCircularLinealHelicoidalCilíndricoEsféricoPlano
El par globular o esférico (Hg. 1-3e) es una articulación de rótula. Posee tresgrados de libertad. una rotación en torno a cada uno de los ejes coordenados.El par plano (Fig. 1-3.1) rara vez se encuentra en los mecanismos en su forma no disfrazada. Tiene tres grados de libertad.Todos los demás tipos de articulaciones se conocen como pares superiores.Entre los ejemplos clásicos están los dientes de engranes acoplados. una rueda queva rodando sobre un riel, una bola que rueda sobre una superficie plana y una levaque hace contacto con su seguidor de rodillo. Pues.. que hay una cantidad infinitade pares superiores no es práctico hacer un recuento sistemático de ellos; de modoque cada uno se analizará conforme se presente cada situación individual.
Entre los pares superiores existe una subcategoiía denominada pares envolventes.Por ejemplo, la conexión entre una banda y una polea, entre una cadena yuna catadna o entre un cable y un tambor. En cada caso, uno de los eslabones secaracteriza por rigidez unilateral.En el estudio de los diversos tipos de articulaciones, ya sean pares inferioresosuperiores, existe otra suposición restrictiva de gran importancia: En el curso de esta obra se supondrá que la articulación real, tal y como se fabrica, puede representarserazonablemente por medio de una abstracción matemática con unageometría perfecta. Dicho de otra manera, cuando se supone que una articulación
de una máquina real es un par esférico, por ejemplo, también se supone que nohay "juego" o espacio libre entre los elementos de la misma, y que cualquier desviaciónen la geometría esférica de los elementos es despreciable. Cuando una articulaciónde pasador se trata como revoluta, se supone que es imposible que selleve a efecto un movimiento axial; si es necesario estudiar los pequeños movimientosaxiales resultantes de los espacios libres entre los elementos reales, la articulaciónse debe manejar como si fuera cilíndrica. para tener en cuenta el movimientoaxial.Tal y como se definió antes, el término "mecanismo" se puede referir a unaamplia variedad de dispositivos que incluyen tanto pares superiores como inferio
res.No obstante, existe un término más descriptivo concerniente a los mecanismosque sólo tienen pares inferiores, y éste es el de eslabonamiento. Asi pues, un
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 23/508
GEOMETRtA DEL MOVIMIENTO 11eslabonamiento se conecta sólo por medio de pares inferiores como los ilustradosen la figura 1-3..1-5 MECANISMOS PLANOSt ESFÉRICOS y ESPACIALESLos mecanismos se pueden clasificar de diversas maneras haciendo/hincapié en sus
similitudes y sus diferencias. Uno de estos agrupamientos divide los mecanismosenplanos, esféricos y espaciales; y los tres grupos poseen muchas cosas en común; sinembargo, el criterio para distinguirlos se basa en las características de los movimientosde los eslabones. -Un mecanismo plano es aquel en el que todas las partículas describen curvasplanas en el espacio y todas éstas se encuentran en planos paralelos; en otraspalabras, los lugares geométricos de todos los puntos son curvas planas paralelasaun solo plano común. Esta característica hace posible que el lugar geométrico decualquier punto elegido de un mecanismo plano se represente con su verdadero
tamai'ío y forma real, en un solo dibujo o una sola figura. La transformación delmovimiento de cualquier mecanismo de esta índole se llama coplanar. El eslabonamientoplano de cuatro barras, la leva de placa y su seguidor. y el mecanismode corredera-manivela son ejemplos muy conocidos de mecanismos planos. Lavasta mayoría de mecanismos en uso hoy en día son del tipo plano.Los mecanismos planos que utilizan sólo pares inferiores se conocen con elnombre de eslabonamientos planos y sólo pueden incluir revolutas y pares prismáticos.Aunque teóricamente es factible incluir un par plano, esto no impondríarestricción alguna y, por lo tanto, sería equivalente a una abertura en la cadenacinemática. El movimiento plano requiere también que los ejes de todos los paresprismáticos y todos los ejes de revolutas sean normales al plano del movimiento.
Mecanismo esférico es aquel en el que cada eslabón tiene algún punto que semantiene estacionario conforme el eslabonamiento se mueve, y en el que los puntosestacionarios de todos los eslabones están en una ubicación común; en otraspalabras, el lugar geométrico de cada punto es una curva contenida dentro de unasuperficie esférica y las superficies esféricas definidas por varios puntos arbitrariamenteelegidos son concéntricas. Por ende, los movimientos de todas las partículasse pueden describir por completo mediante sus proyecciones radiales, o"sombras", proyectadas sobre la superficie de una esfera, con un centro seleccionadoen forma apropiada. La articulación universal de Hooke es quizá el ejemplo
más conocido de un mecanismo esférico. JEslabonamientos esféricos son aquellos que se componen exclusivamente depares de revoluta. Un par esférico no produciría restricciones adicionales y, por ende,sería equivalente a una abertura en la cadena, en tanto que todos los demáspares inferiores poseen movimientos no esféricos. En el caso de eslabonamientosesféricos, los ejes de todos los pares de revoluta se éieben intersecar en un punto. Los mecanismos espaciales nQ incluyen, por otro lado, restricción alguna enlos movimientos relativos de las particulas. La transformación del movimiento no

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 24/508
12 TEORÍA DE MAQUINAS y MECANISMOSes necesariamente coplanar, como tampoco es preciso que sea concéntrica. Unmecanismo espacial puede poseer partículas con lugares geométricos de doble curvatura.Cualquier eslabonamiento que comprenda un par de tornillo, por ejemplo,es un mecanismo espacial, porque el movimiento relativo dentro del par de tornil
loes helicoidal.Por lo tanto, la categoría abrumadoramente más numerosa de mecanismosplanos y la de los esféricos son apenas unos cuantos casos especiales, o subconjuntos,de la categoría general de mecanismos espaciales. Estos se obtienen como unaconsecuencia de la geometría especial en las orientaciones particulares de los ejesde sus pares.Si los mecanismos planos y esféricos son sólo casos especiales de mecanismosespaciales, ¿por qué es aconsejable identificarlos por separado? Debido a que porlas condiciones geométricas particulares que identifican estas clases, es factible
hacer multitud de simplificaciones en su diseño y análisis. Como se señaló con anterioridad,se pueden observar los movimientos de todas las partículas de unmecanismo plano en el tamaño y forma reales, desde una sola dirección. En otraspalabras, es factible representar gráficamente todos los movimientos en una solaperspectiva. De donde, las técnicas gráficas son muy apropiadas para su solución.Puesto que no todos los mecanismos espaciales poseen esta geometría afortunada,su concepción se hace más dificil y es necesario desarrollar técnicas más complejaspara su análisis.Dado que la inmensa mayoria de mecanismos en uso hoy en día son planos,podría ponerse en duda la necesidad de las técnicas matemáticas más complicadasque se usan para los mecanismos espaciales. Existen varias razones por las que l
osmétodos más poderosos sean de gran utilidad a pesar de que se hayan dominadolas técnicas gráficas más simples.1. Proporcionan métodos nuevos y alternativos que resuelven los problemas dediferente manera y, por ende, ofrecen medios para verificar los resultados. Hayciertos problemas que, por su naturaleza, son más fáciles de resolver medianteun método que por otro.2. Los métodos de tipo analítico son más apropiados para obtener soluciones pormedio de calculadoras o computadoras digitales que las técnicas gráficas. 3. Aunquela mayoría de los mecanismos útiles son planos y muy adecuados parasoluciones gráficas, también es preciso analizar los pocos restantes y es necesarioconocer las técnicas para hacerlo.
4. Una razón por la que los eslabonamientos planos son tan comunes es que no secontó con métodos de análisis buenos para los eslabonamientos espaciales másgenerales sino hasta fechas recientes. Sin métodos para analizarlos, su diseño yuso no ha sido muy común, incluso a pesar de que pueden ser inherentementemás apropiados para ciertas aplicaciones. 5. Se descubrirá que los eslabonamientos espaciales son mucho más comunes en lapráctica que lo que revela su descripción formal.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 25/508
GEOMETRIA DEL MOVIMIENTO 13Considérese ui¡, yslabonamiento de cuatro barras, que cuenta con cuatroeslabones conectados por cuatro pasadores cuyos ejes son paralelos. Este "paralelismo"es una hipótesis matemática y no una realidad. Los ejes tal y como seproducen en un taller -en cualquier taller, sin importar lo bueno que éste seaserán
sólo aproximadamente paralelos. Si están muy fuera de paralelismo, habrácierto amarre y el mecanismo sólo se moverá debido a que los eslabones "rígidos"se flexionan y tuercen, produciendo cargas en los cojinetes. Si los ejes son casiparalelos, el mecanismo opera debido a la holgura de los rodamientos o la flexibilidadde los eslabones. Una forma común de compensar las pequeftas faltas deparalelismos es conectar los eslabones con cojinetes autoalineantes que son, enrealidad, articulaciones esféricas que permiten rotaciones tridimensionales. Por ende,esta clase de eslabonamiento "plano" es de índole espacial en grado bajo.1-6 MOVILIDAD
Una de las primeras preocupaciones, ya sea en el disefto o en el análisis de unmecanismo, es el número de grados de libertad, conocido también como movilidaddel dispositivo. La movilidad de un mecanismo es el número de parámetros de entrada(casi siempre variables del par) que se deben controlar independientemente,con el fin de llevar al dispositivo a una posición en particular. Si por el momentose hace caso omiso de ciertas excepciones que se mencionarán más adelante, es factibledeterminar la movilidad de un mecanismo directamente a través de un recuentodel número de eslabones y la cantidad y tipos de articulaciones que incluye.Para desarrollar esta relación considérese que, antes de conectarse entre sí,cada eslabón de un mecanismo plano posee tres grados de libertad cuando semueven en relación al eslabón fijo. Por consiguiente, sin contar este último, un
mecanismo plano de n eslabones posee 3(n - 1) grados de libertad antes de conectarcualquiera de las articulaciones. Al conectar una articulación con un grado delibertad, como por ejemplo, un par de revoluta, se tiene el efecto de proveer dosrestricciones entre los eslabones conectados. Si se conecta un par con dos grados delibertad, se proporciona una restricción. Cuando las restricciones de todas las articulacionesse restan del total de grados de libertad de los eslabones no conectados,se encuentra la movilidad resultante del mecanismo conectado. Cuando seusa jI para denotar el número de pares de un solo grado de libertad y h para el
número de pares con dos grados de libertad, la movilidad resultante m de unmecanismo plano de n eslabones está dada porm 3(n -1)-2j¡ j2 (1-1)Escrita en esta forma, la ecuación (1-1) se conoce como criterio de Kutzbach parala movilidad de un mecanismo plano. Su aplicación se ilustra para varios casossimples en la figura 1-4.Si el criterio de Kutzbach da m > 0, el mecanismo posee m grados de libertad.Si m I, el mecanismo se puede impulsar con un solo movimiento de entrada. Si

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 26/508
14 TEORtA DE MÁQUINAS Y MECANISMOSn = 3,1, 3j2 0, m = OCa)n=4,j, =4,12 O, m = 1
{e)n 4,j, =4,h = O, m 1(b)n=5,j, 5,12 O. m = 2(d)Figura 1-4 Aplicaciones del criterio de movilidad de Kutzbach.m == 2, entonces se necesitan dos movimientos de entrada separados para producir el movimiento restringido del mecanismo; tal es el caso ilustrado en la figura 1-4d.
Si el criterio de Kutzbach da m = 0, como sucede en la figural-4a, el movimiento es imposible y el mecanismo forma una estructura. Si el criterio producem = - 1 o menos, entonces, hay restricciones redundantes en la cadena y formauna estructura estáticamente indeterminada. En la figura 1-5 se ilustran variosejemplos. En ellos se observa que cuando se unen tres eslabones por medio de unsolo pasador, se deben contar dos articulaciones; una conexión de esta índole setrata como si fueran dos pares separados, pero concéntricos.En la figura 1-6 se dan ej..mplos del criterio de Kutzbach aplicado a mecanismos con articulaciones de dos grados de libertad. Se debe prestar atención especialal contacto (par) entre la rueda y el eslabón fijo que aparecen en la fi gura I-ób.En
n = 6,1, 8.i2 0, m =-1(b)Figura 1-5 Aplicaciones del criteriO' de Kutzbach a estructuras.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 27/508
n i2=31,,jml ==21,(alFigura 1-6GEOMETRíA DEL MOVIMIENTO 15n=4,jl 3 i2 1, m 2(b)
este caso se supuso que puede existir un corrimiento o deslizamiento entre loseslabones, Si este contacto incluyera dientes de engranes o si la fricción fuera losuficientemente grande como para evitar el deslizamiento, la articulación se contaríacomo un par con un grado de libertad, puesto que sólo se tendría la posibilidadde un movimiento relativo entre los eslabones.Hay casos en los que el criterio de Kutzbach conducirá a un resultado incorrecto.Nótese que la figura 1-7a representa una estructura y que el criterio predicecorrectamente que m O. No obstante, si el eslabón 5 se coloca como se indica enla figura 1-7b, el resultado es un eslabonamiento de doble paralelogramo con una
movilidad de 1, a pesar de que la ecuación ( 1-1) señala que se trata de una estructura.La movilidad real de 1 se obtiene sólo cuando se logra la geometría de paralelogramo.Puesto que en el desarrollo del criterio de Kutzbach no se hizo consideraciónalguna respecto a las longitudes de los eslabones u otras propiedadesdimensionales, nc;> es sorprendente encontrar excepciones a este criterio, en casosparticulares con longitudes equivalentes de los eslabones, eslabones paralelos u otras características geométricas especiales.Aunque el criterio tiene excepciones, sigue siendo útil gracias a su aplicacióntan sencilla. Para evitar excepciones, sería necesario incluir todas las propiedad
esFigura 1-1n = 5,j¡ = 6j2 = O, m O(a)n=5,i,=6,i2 O, m O(b)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 28/508
16 TEORÍA DE MÁQUINAS Y MECANISMOSdimensionales del mecanismo. En tal caso, el criterio resultante sería muy complejoy resultaría inútil en las etapas iniciales del diseño, cuando es muy probableque se desconozcan aún las dimensiones.Un criterio de movilidad anterior a éste y que lleva el nombre de Grübler, se
aplica a mecanismos con articulaciones de un solo grado de libertad en los que lamovilidad global del mecanismo es igual a la unidad. Al substituir Í2 = O Y m = 1en la ecuación (1-1), se encuentra el criterio de Grfibler para mecanismos planoscon movimiento restringido3n 3it 4 = O (l-2)Esto permite ver, por ejemplo, que un mecanismo plano con movilidad 1 y quesólo tiene articulaciones de un grado de libertad, no puede tener un número imparde eslabones. Del mismo modo es factible encontrar el mecanismo más simpleposible de este tipo; suponiendo que todos los eslabones son binarios se encuentraque n ÍI = 4. Esto demuestra por qué el eslabonamiento de cuatro barras (Fig.
1-4c) y el mecanismo de corredera-manivela (Fig. 1-4b) tienen tantas aplicaciones.Tanto el criterio de Kutzbach, ecuación (1-1), como el criterio de Grübler,ecuación (1-2), se obtuvieron para el caso de mecanismos planos. Si se desarrollan criterios similares para mecanismos espaciales, se debe recordar que cada eslabónno conectado posee seis grados de libertad y cada par de revoluta, por ejemplo,proporciona cinco restricciones. Así pues, algunos argumentos de esta índolellevan a la forma tridimensional del criterio de Kutzbach,m=6(n-1)-5Í¡-4h-3h-2Í4 Ís (1-3)y del criterio de Grübler6n -5j¡ -7 =0 (1-4)La forma más simple de un mecanismo espacialt en el que todos los pares tienen
un solo grado de libertad y con movilidad igual al, es entonces n = it = 7.1-7 INVERSIÓN CINEMÁTICAEn la sección 1-4 se hizo notar que todo mecanismo tiene un eslabón fijo denominadomarco de referencia. Mientras no se selecciona este eslabón de referencia,un conjunto de eslabones conectados se conoce como cadena cinemática. Cuandose eligen diferentes eslabones como referencias para una cadena cinemática dada,los movimientos relativos entre los distintos eslabones no se alteran; pero susmovimientos absolutos (los que se miden con respecto al de referencia) puedent Nótese que todos los mecanismos planos son excepciones para los criterios de movilidad espacial.Poseen (,dracterísticas geométricas especiales en el sentido de que todos los ejes de revolutas son paralelos
y perpendiculares al plano de movimiento, y todos los ejes de los prismas se encuentran en él.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 29/508
GEOMETRÍA DEL MOVIMIENTO 17cambiar drásticamente. El proceso de elegir como referencia diferentes eslabonesde una cadena recibe el nombre de inversión cinemática.En una cadena cinemática de n eslabones, si se escoge cada uno de ellos sucesivamentecomo referencia, se tienen n inversiones cinemáticas distintas de la
cadena, es decir, n mecanismos diferentes. Por ejemplo, la cadena de cuatroeslabones corredera-manivela ilustrada en la figura 1-8 posee cuatro inversiones diferentes.En la figura 1-8a se presenta el mecanismo básico de corredera-manivela, tal ycomo se encuentra en la mayor parte de los motores de combustión interna de hoyen día. El eslabón 4, el pistón, es impulsado por las gases en expansión y constituyela entrada; el eskbón 2, la manivela, es la salida impulsada; y el marco dereferencia es el bloque del cilindro, el eslabón 1. Al invertir los papeles de laentraday la salida, este mismo mecanismo 'puede servir como compresora.En la figura 1-8b se ilustra la misma cadena cinemática; sólo que ahora se ha
invertido y el eslabón 2 queda estacionario. El eslabón 1, que antes era el de referencia,gira ahora en torno a la revoluta en A. Esta inversión del mecanismo decorredera-manivela se utilizó como base del motor rotatorio empleado en losprimeros aviones.En la figura 1-8c aparece otra inversión de la misma cadena de correderamanivela,compuesta por el eslabón 3 , que antes era la biela, y que en estas circunstancias actúa cOmo eslabón de referencia. Este mecanismo se usó para impulsarlas ruedas de las primeras locomotoras de vapor, siendo el eslabón 2 una rueda.(al! Ile I
\::'_/4(e)Figura 1-8 Cuatro inversiones del mecanismo de corredera y manivela.(b)(d)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 30/508
18 TEOR1A DE MÁQUINAS Y MECANISMOSLa cuarta y ilttima inversión de la cadena de corredera-manivela tiene al pistón,el eslabón 4, estacionario. Aunque no se encuentra en motores, si se hace girarla figura 90° en el mismo sentido del movimiento de las manecillas del reloj, este mecanismo se puede reconocer como parte de una bomba de agua para jardin. Se
observará en esta figura que el par prismático que conecta los eslabones 1 y 4 estátambién invertido, es decir, se han invertido los elementos "interior" y "exterior"del par.1-8 LEY DE GRASHOFEvidentemente, una de las consideraciones de mayor importancia cuando se disefia un mecanismo que se impulsará con un motor, es asegurarse de que la manivela deentrada pueaa realizar una revolución completa. Los mecanismos en los que ningúneslabón describe una revolución completa no serían útiles para estas aplicaciones.Cuando se trata de un eslabonamiento de cuatro barras, existe una pruebamuy sencilla para saber si se presenta este caso.
La ley de Grashof afirma que, para un eslabonam iento plano de cuatro barras,la suma de la s lon gitudes m ás corta y m ás larga de los eslabon es no puede sermayor que la suma de las lon gitudes de los dos eslabones restantes, sí se desea queexista una rotación relativa continua entre dos elementos. Esto se ilustra en lafigura 1-9, en donde el eslabón más largo tiene la longitud 1, la del más corto es s y los otros dos tienen las longitudes p y q. Siguiendo esta notación, la ley de Grashofespecifica que uno de los eslabones, en particular el más pequefio, girará continuamenteen relación con los otros tres sólo cuandos+lsp+q (1-5)
Si no se satisface esta desigualdad, ningún eslabón efectuará una revolución completaen relación con otro.Conviene hacer notar el hecho de que nada en la ley de Grashof especifica elorden en el que los eslabones se conectan, o cuál de los eslabones de la cadena de cuatro barras es el fijo. En consecuencia, se está en libertad de fijar cualquiera de los cuatro que se crea conveniente. Cuando se hace ésto se crean las cuatro inversionesdel eslabonamiento de cuatro barras ilustrado en la figura 1-9. Lascuatro se ajustan a la ley de Grashof y en cada una de ellas el eslabón s describe
una revolución completa en relación con los otros eslabones. Las diferentes inversionesse distinguen por la ubicación del eslabón s en relación con el fijo.Si el eslabón más corto s es adyacente al fijo, como se consigna en la figura.1-9a y b, se obtiene lo que se conoce como eslabonamiento de man ivela-oscilador.Por supuesto, el eslabón s es la manivela ya que es capaz de girar continuamente,yel eslabón p, que sólo puede oscilar entre ciertos limites, es el oscilador.El mecanismo de e sla bón de arras.tre, llamado también eslabonamiento dedoble man ivela. se obtiene seleccionando al eslabón más corto s como el de referencia.En esta inversión, que se muestra en la figura 1-9c, los dos eslabones ad-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 31/508
GEOMETRÍA DEL MOVIMIENTO 19p'\..l:t'---..q'' '..''''''''', ...;.;;.;. .--"(b)Idl
Figura }-9 Cuatro inversiones de la cadena de Grashof: a) y b) mecanismo de manivela y oscilador, e) mecanismo de eslabón de arrastre y ti) mecanismo de doble oscilador.yacentes a s pueden girar en forma continua y ambos se describen adecuadamentecomo manivelas y, por lo común, el más corto de los dos se usa como entrada.Aunque se trata de un mecanismo muy común, el lector descubrirá que es unproblema muy interesante intentar construir un modelo práctico que pueda operarun ciclo completo.Si se fija el eslabón opuesto a s, se obtiene la cuarta inversión, o sea, el mecanismode doble oscilador que aparece en la figura 1-9d. Se observará que aunqueel eslabón s es capaz de efectuar una revolución completa, ninguno de los adyacentes
al de referencia puede hacer lo mismo, ambos deben oscilar entre límites y son,por lo tanto, osciladores.En cada una de estas inversiones, el eslabón más corto s es adyacente al máslargo l. No obstante, se tendrán exactamente los mismos tipos de inversiones del.eslabonamiento si el eslabón más largo / está opuesto al más corto s; el estudiantedebe demostrar esto para comprobar que así es en efecto.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 32/508
20 TEORíA DE MÁQUINAS Y MECANISMOS1-9 VENTAJA MECÁNICADebido al uso difundido del eslabonamiento de cuatro barras, conviene hacerahora algunas observaciones, las que ayudarán a juzgar la calidad de este tipode eslabonamiento para su aplicación específica. Examínese el eslabonamiento decuatro barras ilustrado en la figura 1- 10. Puesto que, según la ley de Grashof, e
steeslabonamiento en particular pertenece a la variedad de manivela-oscilador, esmuy probable que el eslabón 2 sea el impulsor y el 4 su seguidor. El eslabón 1 es el de referencia y el 3 se llama el acoplador, dado que acopla los movimientos de lasmanivelas de entrada y salida.La ventaja mecán ica de un eslabonamiento es la razón del momento de torsiónde salida ejercido por el eslabón impulsado, al momento de torsión de entradaque se necesita en el impulsor. En la sección 3-16 se demostrará que la ventajamecánica del eslabonamiento de cuatro barras es directamente proporcional alseno del ángulo l' comprendido entre el acoplador y el seguidor, e inversamente
proporcional al seno del ángulo {J formado por el acoplador y el impulsor. Porsupuesto, estos dos ángulos y, por ende, la ventaja mecánica cambian en formacontinua conforme se mueve el eslabonamiento.Cuando el seno del ángulo {J se hace cero la ventaja mecánica se hace infinita;de donde, en dicha posición, sólo se necesita un pequefio momento de torsión deentrada para contrarrestar una carga de momento de torsión de salida sustancial.Este es el caso en el que el impulsor AB de la figura 1-10 está directamente alineadocon el acoplador Be, y ocurre cuando la manivela está en la posición AB" yotra vez cuando se encuentra en la posición AB4. Se observa que éstas definentambién las posiciones extremas de recorrido del oscilador OCI y DC4 Cuando eleslabonamiento de cuatro barras se encuentra en cualquiera de estas posiciones,la
Figura 1-10
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 33/508
GEOMETRIA DEL MOVIMIENTO 21ventaja mecánica es infinita y se dice que el eslabonamiento tiene una posición devol quete.El ángulo 'Y entre el acoplador y el seguidor se llama ángulo de transmisi ón .Conforme éste disminuye, la ventaja mecánica se reduce e incluso una cantidadpequeña de fricción hará que el mecanismo se cierre o se trabe. Una regla práctica
común es que el eslabonamiento de cuatro barras no se debe usar en la región en laque el ángulo de transmisión sea menor que, por ejemplo, 45 ó 50° . Los valoresextremos del ángulo de transmisión ocurren cuando la manivela AB está alineadacon el eslabón de referencia AD. En la figura 1 - 10, el ángulo de transmisión esmínimo cuando la manivela se encuentra en la posición AB2 y máximo cuando estáen la posición AB3. Dada la facilidad con la que se puede examinar visualmente,el ángulo de transmisión se ha convertido en una medida comúnmente aceptada dela calidad del diseño de un eslabonamiento de cuatro barras.Nótese que las definiciones de ventaja mecánica, volquete y ángulo de transmisióndependen de la elección de los eslabones impulsor e impulsado . En estamisma figura, si el eslabón 4 se usa como impulsor y el 2 actúa como seguidor, lospapeles de f3 y 'Y se invierten. En tal caso, el eslabonamiento no tiene posición
devolquete y su ventaja mecánica se hace cero cuando el eslabón 2 se halla en laposición ABJ o la AB4, en vista de que el ángulo de transmisión es entonces cero.En la sección 3-16 se analizarán con más detalle éstos y otros métodos paraevaluar lo apropiado que puedan ser los eslabonamientos de cuatro barras o deotra indole.1-10 CURVAS DEL ACOPLADORLa biela o acoplador de un eslabonamiento plano de cuatro barras se puede concebircomo un plano infinito que se extiende en todas las direcciones; pero que seconecta por medio de pasadores a los eslabones de entrada y de salida. Así pues,durante el movimiento del eslabonamiento, cualquier punto fijado al plano delacoplador genera una trayectoria determinada con respecto al eslabón fijo y que
recibe el nombre de c urva del acoplador. Dos trayectorias de este tipo, a saber, lasgeneradas por las conexiones de pasador del acoplador, son simples círculos cuyoscentros se encuentran en los dos pivotes fijos; pero existen otros puntos que describencurvas mucho más complejas.El atlas de Hrones-Nelsont es una de las fuentes más notables de curvas deacopladores para eslabonamientos de cuatro barras. Esta obra se compone de unconjunto de gráficas de 1 1 x 17 pulg que contienen más de 7 000 curvas de acopiadoresde eslabonamientos de manivela-oscilador. En la figura 1- 1 1 se incluyela reproducción de una página tipica de este atlas. En cada caso, la longitud de la
t J .A. Hrones y G.L. Nelson, Analysis of the Four-BarLinkage, M.I.T.-Wiley, NewYork, 195 1.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 34/508
- -- --// /,,- ----:.-:..::.- - -- / .. , --....- - .. /' // /""-"\. '::::'.. -....,- - ..r< r>( ft' ..- 1" A--"'..-=C:.:-:G-::: _-_ ._ _ /"' /" / /' /..-'\ ------ " -",-- - "- I / / /' \ ,/'" .. '. ' -", "-
/ ,,/' /'r /(' \ \ _ ',, ' "- / I ji " /' " ___ le- - - ...-..¡- - " , ,,- / / \ -..,.... ,I I I \ " ,.. '-, '" / / I I \ "',,, " "- I I / I I \ "'" "- I I / +- '" I I I II I I / IJI r 1- - I I - /I -/ /I\\\\\ \ \ \
\ \ ¿ / \ / // \\ \\ ' 1 /// / -- / \ '--¡-- / \ \I //\ \ '. \ / " , I?\ . _ / 1\. - - - - I " , I j " " '..- --../ / \ ," ," I "/ " " '----..-"ANÁL¡DIS,E AI SC. HUDrAEonesLT RE yOS GL B.A LAB. RNOReNlsAAoSnM IENTOA'.., A =2.0BC-=22..05Figura 1-11 Reproducción de una de las páginas de Hrones-Nelson. (Reproducida con au
torización de los editores, The Technology Press, M.I. T.,Cambridge, Mass., y John Wiley & Sons, Inc., New York.)....t:)trJ.... ..-< trJ.. ......
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 35/508
GEOMETRíA DEL MOVIMIENTO 23manivela es la unidad y las longitudes de los otros eslabones varían de página apágina para generar diferentes combinaciones. En cada página se eligen variospuntos distintos del acoplador y se presentan las curvas correspondientes. Esteatlas es de valor incalculable para el disefiador que necesita que un eslabonamiento
dé origen a una curva con las características especificadas.La ecuación algebraica de una curva del acoplador es, en general, de sexto orden;de donde, es posible hallar curvas con una gran variedad de formas y muchascaracterísticas interesantes. Algunas de ellas poseen secciones que casi son segmentosrectilineos (véase la sección l - l l); otras tienen secciones de arcos circulares y otras más una o más cúspides, o bien, se cruzan a sí mismas formando figurassemejantes al ocho. Por consiguiente a menudo no es necesario emplear un mecanismocon muchos eslabones para obtener un movimiento bastante complejo .Con todo, l a complejidad d e l a ecuación d e la curva del acoplador constituye
también una desventaja, porque significa que los métodos de cálculo manual sehacen sumamente engorrosos . Por lo tanto, en el curso de los afios se han disefiadomuchos mecanismos aplicando procedimientos estrictamente intuitivos que severifican después con modelos de cartón, sin usar principios o procedimientoscinemáticos. Hasta hace poco, estas técnicas que ofrecian un planteamiento racionalhan tenido una naturaleza gráfica evitando una vez más los cálculostediosos. Por último, gracias al advenimiento de las computadoras digitales y, enparticular, con el desarrollo de las gráficas con computadora, en la actualidad estánapareciendo métodos de disefío muy útiles que llevan a cabo directamente loscálculos complicados que se requieren, sin abrumar al disefíador con el tremendotrabajo de cálculo (véase la sección 5-5 en donde se dan más datos sobre estos
métodos de disefío) .Uno de los hechos más curiosos e interesantes acerca de la ecuación de la curvade un acoplador, es que la misma curva se puede generar siempre con treseslabonamientos distintos. Estos se conocen como eslab on amien tos afines y suteoría se expone en la sección 10- 1 1 .1.11 MECANISMOS DE LíNEA RECTAA finales del siglo XVII , antes de la aparición de la fresadora, era extremadamentedificil maquinar superficies rectas y planas; y por esta razón no era fácil fabricar pares prismáticos aceptables , que no tuvieran demasiado juego entre dientes.Durante esa época se reflexionó mucho sobre el problema de obtener un movimiento
en línea recta como parte de la curva del acoplador de un eslabonamientoque sólo contara con conexiones de revoluta. Es probable que el resultado mejorconocido de esta búsqueda sea la invención del mecanismo de línea recta desarrolladopor Watt para guiar el pistón de las primeras máquinas de vapor. En lafigura 1-120 se muestra que el eslabonamien to de Watt es uno de cuatro barras quedesarrolla una línea aproximadamente recta como parte de su curva del acoplador.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 36/508
24 TEORtA DE MÁQUINAS Y MECANISMOS(a)(e) Id)Figura 1-11 Mecanismos de linea recta: a) eslabonamiento de Watt, b) mecanismo de Roberts, e) eslabonamiento de Chebychev y d) i nversor de Peaucillier.Aunque no describe una recta exacta, se logra una aproximación aceptable sobre
una distancia de recorrido considerable.Otro eslabonamiento de cuatro barras en el que el punto de trazo P genera unsegmento aproximadamente rectilíneo de la curva' del acoplador, es el mecanismode Roberts (Fig. 1- 12b). Las líneas a trazos de la figura indican que el eslabonamientose define cuando se forman tres triángulos isósceles congruentes; de donde,BC = AD/2.El punto de trazo P del eslabonamiento de Chebychev de la figura 1-12cgenera también una linea más o menos recta. El eslabonamiento se forma creandoun triángulo 3-4-5 con el eslabón 4 en posición vertical, como la señalan las lineasa trazos; así pues, DB' = 3, AD = 4, Y AB' = 5. Puesto que AB = DC,DC' = 5 Y elpunto de trazo P' es el punto medio del eslabón BC. Nótese que DP' C forma
también un triángulo 3-4-5 y, por tanto, P y P' son dos puntos sobre una rectaparalela a AD.Aun más, otro mecanismo que genera un segmento rectilineo es el inversor dePeaucillier ilustrado en la figura 1-12d. Las condiciones que describen su geometría

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 37/508
GEOMETRÍA DEL MOVIMIENTO 25son que BC = BP = E C = EP Y AB = AE de tal modo que, por simetría, lospuntos A, C y P siempre están sobre una recta que pasa por A . En estas circunstancias,AC'AP = k, una constante, y se dice que las curvas generadas por C y Pson inversas una de la otra. Si se coloca el otro pivote fijo D de tal suerte qu
e AD= CD , entonces, el punto C debe recorrer un arco circular y el punto P describiráuna línea recta exacta . Otra propiedad interesante es que si AD no es igual a CD,se puede hacer que el punto P recorra un arco verdaderamente circular de radiomuy grande.Hunt, Fink y Nayart dan las dimensiones de una clase de eslabonamientos decuatro barras que generan una trayectoria triangular simétrica en la que dos de loslados son aproximadamente rectos.Hartenberg y Denavit:j: , y Hall§ ilustran la mayor parte de los generadores
clásicos de líneas rectas. Tesar y Vidosicll investigaron con gran detalle los mecanismosgeneradores de rectas aproximadas e hicieron una recopilación considerablede información de diseño sobre esta clase de mecanismos.1-12 MECANISMOS DE RETORNO RÁPIDOEn muchas aplicaciones, los mecanismos se usan para realizar operaciones repetitivastales como empujar piezas a lo largo de una línea de montaje, sujetar piezasjuntas mientras se sueldan o para doblar cajas de cartón en una máquina de embalajeautomatizada. En esta clase de aplicaciones resulta a menudo convenienteusar un motor de velocidad constante, y esto es 10 que llevó al análisis de la ley deGrashof presentada en la sección 1-8. No obstante, también es preciso tomar en
cuenta los requerimientos de energía y tiempo.En estas operaciones repetitivas existe por lo común una parte del ciclo en laque el mecanismo se somete a una carga, llamada carrera de a van ce o de trabajo, yuna parte del ciclo conocida como carrera de re torno en la que el mecanismo noefectúa un trabajo sino que se limita a devolverse para repetir la operación. Porejemplo, en el mecanismo excéntrico de corredera-manivela de la figura 1-13,puede ser que se requiera trabajo para contrarrestar la carga F mientras el pistónsemueve hacia la derecha, desde el hasta C2 ; pero no así durante su retorno a laposición el, ya que es probable que se haya quitado la carga. En tales situaciones,
para mantener los requerimientos de potencia del motor en un mínimo y evitar eldesperdicio de tiempo valioso, conviene diseñar el mecanismo de tal manera queel pistón se mueva con mayor rapidez durante la carrera de retorno que en lat K. H. Hunt, N. Fink Y J. Nayar, "Linkage Geneva Mechanisms: A design Study inMechanismGeometry," Prac. Inst. Mech. Engr., vol. 1 74, no. 21, pp. 643-668, 1 960; véase también J. Hirschhorn,Kinematics and Dynamic 01 Plane Mechanisms, McGraw-Hill, New York, 1964, pp. 349-353.:j: Op. cit.§ A. S. Hall. Jr., Kinematics and Linkage Design, Prentice-Hall, Englewood CUrfs,N . J . , 196 1 ... D. Tesar y J . P. Vidosic, "Analysis o f Approximate Four-Bar Straight-Line M
echanisms," J.Eng. lnd .. Vol. 87, no. 3, 1965.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 38/508
26 TEORíA DE MÁQUINAS Y MECANISMOScarrera de trabajo, es decir, usar una fracción mayor del ciclo para ejecutar eltrabajo que para el retorno.Una medida de lo apropiado de un mecanismo desde este punto de vista,conocida con el nombre de razón del tiempo de avance al tiempo de retorno , sedefine mediante la fórmula
tiempo de la carrera de avanceQ = tiempo de la carrera de retorno (a )Un mecanismo para el cual el valor de Q es grande, resulta más conveniente paraesta clase de operaciones repetitivas que aquéllos que se caracterizan por valores pequeños de Q. Ciertamente, cualquier operación de esta naturaleza emplearia unmecanismo para el cual Q es mayor que la unidad. Debido a esto, los mecanismoscon valores de Q superiores a la unidad se conocen como de retorno rápido.Suponiendo que el motor impulsor opera a velocidad constante, es fácil encontrarla razón de tiempos. Como se indica en la figura 1-13, lo primero es determinarlas dos posiciones de la manivela, AB¡ y AB2, que marcan el principio y elfin de la carrera de trabajo. A continuación, después de observar la dirección de
rotación de la manivela, se mide el ángulo de la manivela a que se recorre durantela carrera de avance y el ángulo restante de la manivela 13, de la carrera de retorno.Luego, si el periodo del motor es 'r, el tiempo de la carrera de avance es'Tiempo de la carrera de avancey el de la carrera de retorno es-a T 27TTiempo de la carrera de retorno = f; 'r(b)(c)Por último, combinando las ecuaciones (a) , (b) y (e) se obtiene la sencilla expresión
que sigue para la razón de tiempos:FaQ=-13¡.. CC:arrera d"::oe ..retomo Figura 1-13 Mecanismo excéntrico de corredera y manivela.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 39/508
GEOMETRÍA DEL MOVIMIENTO 27FFigura 1-14 Mecanismo de Whitworthde retorno rápido.Nótese que la razón de tiempos de un mecanismo de retorno rápido no dependede la cantidad de trabajo realizado o incluso de la velocidad del motor impulsor
,sino que es una propiedad cinemática del propio mecanismo y se encuentrabasándose exclusivamente en la geometría del dispositivo.No obstante, se observará también que existe una dirección apropiada derotación y una no apropiada en esta clase de dispositivo. Si se invirtiera el motordel ejemplo de la figura 1 - 1 3 , los papeles de (X y f3 se invertirían también y la razónde tiempos sería menor que l . De donde, el motor debe girar en el sentido contrarioal del movimiento de las manecillas del reloj cuando se trata de este mecanismo, con el fin de asegurar la propiedad de retorno rápido.
Es factible encontrar muchos otros mecanismos con características de retornorápido. Otro de los ejemplos clásicos es el mecanismo de Whitworth , llamado tambiénmecanismo de limadora o troquel de manivela, y que se ilustra en la figura1 - 1 4. Aunque la determinación de los ángulos (X y f3 es diferente para cada mecanismo,la ecuación (1-6) se aplica a todos ellos.PROBLEMAS1- 1 Dibújense por lo menos seis ejemplos distintos de la aplicación de un eslabonamiento plano decuatro barras de tipo común. Estos pueden encontrarse en talleres, aparatos domésticos, vehículos,maquinaria agrícola, etc ..1-2 Las longitudes de los eslabones de un eslabonamiento plano de cuatro barras
son 1 , 3, 5 y 5 pulg.Móntense en todas las combinaciones posibles y dibújense cuatro inversiones de cadauno. ¿Satisfacenestos eslabonamientos la ley de Grashof? Descríbase cada inversión por nombre, por ejemplo, mecanismode manivela y oscilador o mecanismo de eslabón de arrastre.1-3 Un eslabonamiento de manivela-oscilador tiene un eslabón de referencia de 100mm, una manivelade 25 mm, un acoplador de 90 mm y un oscilador de 75 mm. Dibújese el eslabonamiento y encuéntrenselos valores máximo y mínimo del ángulo de transmisión. Localícense las dos posiciones de volquete y
anótense los ángulos de la manivela correspondientes, así como los de transmisión.1-4 En la figura, el punto e está sujeto al acoplador; trácese su trayectoria completa.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 40/508
28 TEORlA DE MÁQUINAS Y MECANISMOSProblema 1-41-5 Encuéntrese la movilidad de cada uno de los mecanismos ilustrados en la figuraque sigue.(a) (b)(e)
Problema 1-51-6 Aplíquese el criterio de movilidad para encontrar un mecanismo plano que contenga un eslabóncuaternario móviL ¿Cuántas inversiones de este mecanismo pueden hallarse?1-7 Determínese la razón de tiempos del eslabonamiento del problema 1-2.1-8 Diséñese un modelo práctico del mecanismo de eslabón de aJTastre.1-9 Trácese la gráfica de la curva completa del acoplador correspondiente al mecanismo de Robertsilustrado en la figura 1-12b. Úsese AB CD AD = 2.5 pulg y Be = 1 .25 pulg.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 41/508
CAPITULODOSPOSICIÓN Y DESPLAZAMIENTOAl analizar el movimiento , el problema inicial y más fundamental que se encuentra es definir y manejar los conceptos de posición y desplazamiento. Puesto que se
puede considerar que el movimiento es una serie de desplazamientos en el tiemposiguiendo posiciones sucesivas, es importante comprender con exactitud el significadodel término posición; en otras palabras, es necesario establecer reglas oconvenciones para que la definición sea precisa.Aunque muchos de los conceptos df;! este capítulo puedan parecer intuitivos ycasi triviales, aquí se explican muchas sutilezas que es obligatorio comprender paraentender los siguientes capítulos.2-1 SISTEMAS DE COORDENADASAl hablar de la posición de una partícula o de un punto, se está contestando enrealidad a la pregunta: ¿en dónde se encuentra el punto o cuál es su ubicación? Se
está haciendo referencia a algo que existe en la naturaleza y crea la interrogantedecómo expresarlo (en palabras , símbolos o números) de tal manera que su significadosea claro. Pronto se descubre que n o se puede definir la posición en formaverdaderamente absoluta; la posición de un punto debe definirse expresándola enfunción de algún marco de referencia acordado, o sea, un sistema de coordenadasde referencia.Como se ilustra en la figura 2-1a, una vez que se establece el sistema de coordenadasxyZ como el marco de referencia , se dice que el punto P está localizado a xunidades a lo largo del eje x, y unidades a lo l argo del eje y y z unidades a lo largodel eje z a partir del origen O. En la propia definición se observa que hay tres p
ar-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 42/508
30 TEORfA DE MÁQUINAS Y MECANISMOSx,/z¡ !
,If ----....----/fli p I: I: if¡ I/ !: I://IRk----+---r--yy(a) z----_--:z:..- :::::. Observadorx(blFigura 2-1 a) Sistema derecho de coordenadas tridimensionales; b) posición de un p
unto.tes vitalmente importantes que dependen de la existencia del sistema de coordenadasde referencia:1. El origen de las coordenadas O proporciona una ubicación acordada a partir dela cual se mide la situación del punto P.2. Los ejes de coordenadas proporcionan direcciones acordadas (y sentidos acordados)a lo largo de las cuales se harán las mediciones; también ofrecen rectas yplanos conocidos para definir y medir ángulos.3. La unidad de distancia o distancia unitaria a lo largo de cualquiera de los ejesconstituye una escala para cuantificar las distancias.
Estas observaciones no se restringen a las coordenadas cartesianas (x,y,z) delpunto P. Las tres propiedades del sistema de coordenadas también son necesariaspara definir las cilíndricas (r, O, z), las esféricas (R, 8, tP) o cualesquiera otrascoordenadas del punto P. Asimismo, se necesitarían las mismas propiedades si elpunto P se restringiera a permanecer en un solo plano y se empleara un sistema decoordenadas bidimensional. No importa como se defina, el concepto de la posiciónde un punto no se puede relacionar sin definir un sistema de coordenadas de referencia.2-2 POSICIÓN DE UN PUNTOComo se ilustra en la figura 2-tb, el proceso fisico que se sigue para observar
la posición de un punto implica que el observador está siguiendo en realidad la
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 43/508
POSICIÓN Y DESPLAZAMIENTO 31ubicación relativa de dos puntos, P y O, viéndolos, efectuando una comparaciónmental y reconociendo que el punto P posee una colocación determinada conrelación al punto O. En esta determinación sobresalen dos propiedades, la distanciade O a P (basada en la distancia unitaria o en las dimensiones del cuadriculadodel sistema de coordenadas de referencia) y la orientación angular relativa de la
recta OP en el sistema de coordenadas. Estas dos propiedades, magnitud y dirección (y sentido), son precisamente las que se requieren en un vector; de donde, laposición de un punto se define como el vector que va del origen de un sistema decoordenadas de referencia especificado al punto. Aqui se eligió el simbolo RPQpara denotar la posición vectorial del punto P con relación a l punto O.Por consiguiente, el sistema de coordenadas de referencia está relacionado enl.llla forma especial con un concepto particular del observador sobre lo que ve. ¿Cuál es esta relación ? ¿Qué propiedades debe poseer este sistema de coordenadaspara asegurar que las mediciones de posición hechas con respecto al mismo representen
verdaderamente sus observaciones? La clave de esta relación es que elsistema de coordenadas es estacionario con respecto a dicho observador. En otras palabras, el observador se considera a sí mismo como un elemento estacionario ensu sistema de coordenadas de referencia elegido. Si se mueve, ya sea recorriendo una dist¡mcia o girando, su sistema de coordenadas se mueve con éL De estamanera se asegura que los objetos que parecen estacionarios con respecto a él, esdecir, tal y como los observa, no cambian sus posiciones dentro del sistema decoordenadas y sus vectores de posición permanecen constantes. Los puntos quepercibe como móviles cuentan con vectores de posición variables.Se notará que no se ha hecho mención de la ubicación real del observadordentro del marco de referencia. Se puede encontrar en cualquier punto dentro de
dicho sistema; y no es necesario conocer su posición ya que las posiciones de lospuntos observados se encuentran con relación al origen de las coordenadas, y nocon respecto a la del observador.Con frecuencia es conveniente expresar el vector de posición en términos desus componentes a lo largo de los ejes de coordenadas(2-1)en donde l os subíndices denotan la dírección de cada componente. De aquí enadelante, en esta obra se usarán los simbolos i, j y k para designar los vectoresunitarios en las direcciones de los ejes x, y y z, respectivamente. En tanto quelosvectores se denotan en esta obra utilizando negritas, la magnitud escalar de unvector
se representa con el mismo simbolo en cursivas blancas. Por ejemplo, la magnitud del vector de posición esRPO = IRPOI = VRPO RPQ = V (Rf>o)2 + (RJ,o)2 + {Rf>of (2-2)El vector unitario en la dirección de RPQ se denota con el mismo símbolo en negritas con un signo de intercalación arriba:A Rpo RPQ=- (2-3) Rpo
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 44/508
32 TEORtA DE MÁQUINAS Y MECANISMOSLa dirección de Rpo se puede expresar, entre otras maneras, mediante los cosenosdirectoresR}o COsa =-Rpo cos {3 = Rf.oRpoRZ cos 'Y = RPO PO
(2-4)en donde los ángulos a, (3, y 'Y son, respectivamente, los ángulos medidos a partirde los ejes de coordenadas positivos hasta el vector RroUno de los medios para expresar el movimiento de un punto o una partículaconsiste en definir sus componentes a lo largo de los ejes de referencia, como funcionesde algún parámetro, por ejemplo, el tiempoRf,o = RJ,o(t) R¡'o Rj,o(t) (2-5)Si se conocen estas relaciones, se puede hallar el vector de posición R'Fo para cualquierinstante t. Este es el caso general del movimiento de una partícula y se ilustraen el ejemplo que sigue.
Ejemplo 2-1 Descríbase el movimiento de una partícula P cuya posición cambia con el tiemposegún las ecuaciones R'í>o = a cos 27ft, R..o =" a sen 27ft, y R..o = bt.SOLUCiÓN Al sustituir los valores de t, de O a 2, se obtienen los valores indicados en la tabla quesigue:O14 .. 4Z2R..oaO -aO
aO-aO aR¡,o R..oO O a b/4O b/2 -a 3b/4O b a 5b/4O 3b/2 -a 7b/4O 2bComo se indica en la figura 2-2, el punto describe un movimiento helicoidal conradio a. en torno
al eje z, Y con un avance b. Nótese que si b =O,R..o(t) O. la partícula en movimiento quedaconfinada al plano xy y describe un circulo cuyo centro se localiza en el origen.Se han venido usando las palabras partícula y punto en forma intercambiable.Cuando se utiliza el vocablo punto se piensa en algo que carece de dimensiones,esdecir, con longitud cero, anchura cero y espesor cero. Cuando se emplea el término partícula se piensa en algo cuyas dimensiones son tan pequefias y sin importancia, es decir, un cuerpo material tan diminuto, que sus dimensiones son despreciables,
un cuerpo lo suficientemente pequefio como para que sus magnitudes no tenganefecto sobre el análisis que vaya a realizarse.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 45/508
xzPOSICIÓN Y DESPLAZAMIENTO 33Figura 2-2 Movimiento helicoidal deuna partícula.Las posiciones sucesivas de un punto en movimiento definen una recta o una
curva. Esta curva no tiene espesor dado que el punto carece de dimensiones; sinembargo. la curva tiene longitud puesto que el punto ocupa diferentes posiciones conforme varía el tiempo. Esta curva, que representa las posiciones sucesivas delpunto, se denomina trayectoria o lugar geométrico del punto en movimiento en elsistema de coordenadas de referencia.Si se necesitan tres coordenadas para describir la trayectoria de un punto enmovimiento, se dice que éste tiene movimiento espacial. Si se puede describir pormedio de dos coordenadas solamente, o sea, si se pueden elegir los ejes de coordenadasde tal manera que una coordenada siempre sea cero o constante, la trayectoriaestá contenida en un solo plano y se dice que el punto posee movimiento
plano. Hay ocasiones en que la trayectoria de un punto se puede describir medianteuna sola coordenada; lo que significa que dos de sus coordenadas espaciales deposición se pueden tomar como cero o constantes. En este caso el punto se mueveen línea recta y se dice que manifiesta un movimiento rectilíneo.En cada uno de los tres casos descritos se supone que el sistema de coordenadasse elige de tal modo que se obtenga el número minimo de coordenadas necesariaspara describir el movimiento del punto. De donde, la descripción del movimientorectilíneo sólo necesita una coordenada, un punto cuya trayectoria es una curvaplana requiere dos coordenadas y un punto cuyo l ugar geométrico es una curva enel espacio, que en ocasiones se denomina también curva sesgada, necesita trescoordenadas de posición.2-3 DIFERENCIA DE POSICIÓN ENTRE DOS PUNTOS
Ahora se investigará la relación entre los vectores de posición de dos puntos diferentes;esta situación se ilustra en la figura 2-3a. En la sección anterior se demos-
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 46/508
34 TEORtA DE MÁQUINAS Y MECANISMOSY Yl 11I Y O2P P..--.... --- 1
í---II II X· II X XlZ·Z 11(al lb)Figura 2-3 a) Diferencia de posición entre dos puntos, P y Q. b) Posición aparente de un punto P.tró que un observador fijo en el sistema de coordenadas xyz consideraría lasposiciones de los puntos P y Q comparándolas con la ubicación del origen. Lasposiciones de los dos puntos se definen por medio de los vectores Rro Y RQO-Al examinar la figura se observa que tales vectores están relacionados por untercer vector RPQ. que es la diferencia de pQsición entre los puntos P y Q. En la
figura se ve que esta relación es(2-6)La interpretación física es ahora ligeramente distinta de la del propio vector deposición. El observador ya no está comparando la posición del punto P con la delorigen; ahora la está comparando con la del punto Q. En otras palabras, está observandola posición del punto P como si se encontrara en otro sistema de coordenadastemporales x'y'z', cuyo origen se localiza en Q, y cuyos ejes son paralelosta los de su sistema básico de referencia xyz. Se suele aplicar cualquiera deestos puntos de vista para la interpretación, y es necesario comprender ambos porquese emplearán en desarrollos futuros.Después de generalizar el concepto de posición relativa para incluir la diferencia
de posición entre dos puntos cualesquiera, conviene retornar al estudio anteriordel propio vector de posición. Se observa que es simplemente el caso especial en elque se conviene efectuar las mediciones utilizando el origen de coordenadas como segundo punto. De donde, para ser coherentes por lo que respecta a la notación, el vector de posición de un solo punto P se denota con el símbolo de doble subíndiceRPO No obstante, para mayor brevedad se convendrá que de aquí en adelante,t El que estos sistemas de coordenadas tengan ejes paralelos es una condición conveniente más quenecesaria. Sin embargo. este concepto se sostendrá a lo largo de esta obra en virt
ud de que no se pierdegeneralidad y si se simplifica la concepción cuando los sistemas de coordenadas están en movimiento.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 47/508
POSICIÓN Y DESPLAZAMIENTO 35cuando no se especifique el segundo subíndice en forma explicita, se entiende quees el origen del sistema de coordenadas del observador.(2-7)2-4 POSICIÓN APARENTE DE UN PUNTOHasta ahora, al analizar el vector de posición, el punto de vista sustentado ha si
dopor completo el de un solo observador en un solo sistema de coordenadas. No obstante,a menudo resulta conveniente hacer observaciones en un sistema de coordenadassecundario, es decir, tal Y como lo ve un segundo observador en un sistemade coordenadas distinto, y luego llevar esta información hacia el sistema decoordenadas básico. En la figura 2-3b se ilustra esta situación.Si se pide a dos observadores, uno de los cuales utiliza el marco de referenciaXIY¡Z¡ Y el otro el X2Y2Z2, que den la ubicación de un particula en P, proporcionaríanresultados distintos. El observador del primer sistema de coordenadasx¡y¡z¡vería el vector RPO" mientras que el segundo, el que utiliza .el sistema X2Y2Z2.señalaría el vector de posición Rpo;¡. En la figura 2-3b se observa que estos vectores
están relacionados por medio de la expresión(2-8)La diferencia en las posiciones de los dos origenes no es la única incompatibilidadentre las dos observaciones de la posición del punto P. Puesto que los dossistemas de coordenadas no están alineados,t los dos observadores usarían diferentes rectas de referencia para sus mediciones de la dirección; el primero daría lascomponentes medidas a lo largo de los ejes XtY¡Z¡, mientras que el segundo loharía en las direccione1ó¡ X2Y2Z2.Hay una tercera distinción de suma importancia entre estas dos observacionesque se hace evidente cuando se considera que los dos sistemas de coordenadas pueden
estar en movimiento el uno con respecto al otro. Mientras que el punto P puedeparecer estacionario con respectp a uno de los observadores, puede estar en movimientocon respecto al otro; dicho de otra manera, el vector de posición Rpo,puede parecer constante al observador 1, en tanto que al observador 2 le pareceráque Rpo;¡ varía .Cuando existe cualquiera de estas condiciones, será conveniente agregar unsubíndice más a la notación usada para distinguir al observador que se está tomandoen consideración. Cuando se está considerando la posición de P, vista por elobservador que usa el sistema de coordenadas x¡y¡Z¡, ésto se denotará con el símboloRPO¡/h o bien, puesto que 01 es el origen para este observador ,t por mediot Nótese que la condición de que los sistemas de coordenadas tengan ejes paralelos s
e supuso para elvector de diferencia de posiciones, figura 2-3a; pero no así para el vector de posición aparente.:j: Se observará que RPOzII no se puede abreviar escribiéndolo Rpl" puesto que O2 noes el origen queutiliza el observador L

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 48/508
36 TEORlA DE MÁQUINAS Y MECANISMOSde Rp/l. Las observaciones hechas por la segunda persona, en el sistema de coordenadasX2Y2Z2 se denotarán con los símbolos RpO¡/2 o Rm. Con esta ampliaciónde la notación, la ecuación (2-8) se convierte en(2-9)
El vector RPÍ2 se denomina posición aparente del punto P para un observador en elsistema de coordenadas 2, y es obvio que de ninguna manera es igual al vector de posición aparente Rp11, visto por el observador l.Se han hecho notar ahora ciertas diferencias intrínsecas entre Rp/I y Rm Y seha encontrado la ecuación (2-9) para relacionarlos. No obstante, no existe razónalguna por la que las componentes de cualquiera de los vectores deban tomarse alo largo de los ejes naturales del sistema de coordenadas del observador. Al igualque con todos los vectores, se pueden hallar las componentes a lo largo de cualquierconjunto conveniente de ejes.
Al aplicar la ecuación de la posición aparente (2-9) ,es necesario usar un soloconjunto coherente de ejes durante la evaluación numérica. Aunque el observadoren el sistema de coordenadas 2 pensaría que lo más natural seria medir las componentesde Rm a lo largo de los ejes X2Y2Z2, éstas se debm transformar en lascomponentes equivalentes en el sistema X¡YIZI., antes de que se lleve a cabo enrealidad la adiciónRm = RO¡/I + Rp/2R x' : R Y' .. Rt" RX' .. RY' .. RZ1 kA= 02/111 + 0l/l)1 + O¡/lk¡ + P/211 + P/2JI + PI2 I(Rx, RX'): (RY' RY1 ).. (Rt, RZ¡ )kA= O2/1 + P/2 11 + 02/1 + P/2 JI + 02/1 + P/2 1= R XPII \l.. \+ R YPII 1J-: ¡ + R ZPtI !k1"- !
La adición se efectúa con la misma facilidad si todas las componentes vectorialesse transforman al sistema X2Y2Z2 o bien, según sea el caso, a cualquier otro conjuntocoherente de direcciones. Sin embargo, no se p ueden sumar algebraicamentecuando se midieron a lo largo de ejes no coherentes. Por lo tanto, el subíndiceadicional en el vector de posición aparente no especifica, un conjunto de direccionesque sea preciso usar en la evaluación de las componentes; sólo se limita aidentificar el sistema de coordenadas en el que se define al vector, el sistemaen elque el observador es estacionario.2-5 POSICIÓN ABSOI.UTA DE UN PUNTO
Ahora se verá el significado de posición absoluta. En la sección 2-2 se vio que todovector de posición se define en relación con un segundo punto, el origen del sistema de coordenadas de referencia del observador. Se trata de un caso especial delvector de diferencia de posición que se vio en la sección 2-3, en el que el punto de referencia es el origen de las coordenadas.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 49/508
POSICIÚN y DESPLAZAMIENTO 37En la sección 2-4 se hizo notar que quizá en ciertos problemas r..sulte convenienteconsiderar las posiciones aparentes de un solo punto, vistas por más de unobservador. que utilicen sistemas de coordenadas diferentes. No obstante, cuando un problema en particular obliga a considerar varios sistemas de coordenadas, la
aplicación conducirá a la identificación de un solo sistema de coordenadas como elprimario o más fundamental. En la mayor parte de los casos, este es el sistema enel que se expresará el resultado final y casi siempre se considera que es estacionario;por lo anterior se le conoce como sistema absoluto de coordenadas. Laposición absoluta de un punto se define como su posición aparente vista por unobservador en el sistema absoluto de coordenadas.Decidir cuál sistema de coordenadas se designe como absoluto (más básico) esarbitrario y no tiene importancia en el estudio de la cinemática. El hecho de queelsistema absoluto de coordenadas sea verdaderamente estacionario es un tanto disc
utibleya que, como se hizo ver, toda la información acerca de la posición (y elmovimiento) se mide en relación con algo más; nada es verdaderamente absolutoen el sentido estricto. Por ejemplo, cuando se analiza la cinemática de una suspensiónde automóvil, puede resultar conveniente elegir un sistema "absoluto" decoordenadas fijado a la estructura del auto, y estudiar el movimiento de la suspensiónen relación con tal sistema. Así pues, no tiene importancia si el automóvil estáo no en movimiento; los movimientos de la suspensión con relación a la estructurase definirian como absolutos.Una convención común es asignarle al sistema absoluto de coordenadas elnúmero 1 y utilizar otros números para los demás sistemas de coordenadas en
movimiento. Puesto que se adopta esta convención en el curso de esta obra, losvectores de posición absoluta son los de posición aparente vistos por un observadordentro del sistema de coordenadas 1, y sus símbolos tienen la forma RP/I.Por brevedad, y con el fin de reducir su complejidad, también se convendrá enque cuando no se indique explícitamente el número del sistema de coordenadas sesobreentenderá que es 1; por ende, Rp/1 se puede abreviar Rp. Del mismo modo. laecuación de la posición aparente (2-9) se puede escribirt como sigueRp = Ro;¡ + RP/2 (2- JO)2-6 ECUACIÓN DE CIERRE DEL CIRCUITOHasta ahora el estudio sobre los vectores de diferencia de posición y de posiciónaparente ha sido bastante abstracto. con el propósito de desarrollar un fundamento
riguroso para el análisis del movimiento en sistemas mecánicos. Ciertamente,la precisión tiene su propio mérito, porque este rigor es el que permite que lat Sí se repasan las secciones 2-1 se verác..que el vector de diferencia de posición RPQ se manejó porcompleto dentro del sistema absoluto de coordenadas, y es una abreviatura de lanotación Rpo/lo Noserá necesario, tratar el caso completamente general RpQ/2, el vector de la diferencia de posición aparente.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 50/508
38 TEORíA DE MÁQUINAS Y MECANISMOSciencia prediga un resultado correcto, a pesar de los prejuicios y los sentimientospersonales del analista. Sin embargo, los desarrollos tediosos no son interesantes amenos que lleven a aplicaciones en problemas de la vida real. Aunque existen
todavía muchos principios fundamentales por descubrir, podría resultar convenientemostrar ahora la relación entre los vectores de posición relativa que sevieron con anterioridad y algunos de los eslabonamientos tipicos que se encuentranen las máquinas reales.Uno de los mecanismos más común y útil es el eslabonamiento de cuatrobarras. En la figura 2-4 se ilustra un ejemplo de éste, un dispositivo de sujeción.Un estudio breve del diagrama del conjunto revela que al elevar la manija de lamordaza, la barra gira alejándose de la superficie de sujeción, abriendo la mordaza. Al oprimir la manija, la barra gira hacia abajo y la mordaza se vuelve acerrar. No obstante, si se desea diseñar este tipo de mordaza con exactitud, la
cuestión no resulta tan sencilla. Quizá sea conveniente, por ejemplo, que la mor-O.203dlá .- 4 orificiosr1..16 I200 lbFigura 2.4 Diagrama de montaje de un mecanismo de sujeción manual.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 51/508
POSICIÓN Y DESPLAZAMIENTO 39daza se abra a una velocidad dada para determinada velocidad de elevación de lamanija. Estas relaciones no son obvias; dependen de las dimensiones exactas de lasdiversas piezas y las relaciones o interacciones entre ellas. Para descubrir estas
relaciones se necesita una descripción rigurosa de las características geométricasesenciales del dispositivo. Se pueden usar los vectores de diferencia de posiciónyde posición aparente para proporcionar tal descripción.En la figura 2-5 se consignan los diagramas detallados de los eslabones individualesde la mordaza desmontada. Aunque en este caso no se indican, losdibujos detallados deben incluir todas las dimensiones, determinando así, de unavez por todas, la geometría completa de cada eslabón. La suposición de que todoslos eslabones son rígidos asegura que se puede determinar con precisión la posiciónde cualquier punto en cualquiera de los eslabones, en relación con cualquier otropunto del mismo eslabón , por medio de la simple identi ficación de los puntos
apropiados y fijando la escala correcta en los dibujos detallados.No obstante, las características que se pierden en los dibujos detallados sonlas interrelaciones de las piezas individuales; esto es , las restricciones queaseguranque cada eslabón se moverá en relación con lo que lo rodea en la forma prescrita.Por supuesto, las cuatro articulaciones de pasador proporcionan estas restricciones.Sabiendo que tienen gran importancia en cualquier descrípción de loseslabonamientos, estos centros de pasador se identificarán desde ahora con lasletras A, B, e y D, Y los puntos apropiados del eslabón 1 como Al y DI. los deleslabón 2 como Az Y B2, etc. Como se ve en la figura 2-5, también se toma unsistema de coordenadas diferente unido rígidamente a cada eslabón.Yl
(a)b :42 B2 2(b)x,X2 RocY3e .. X3(e)Y4r' D4x4(d)
Figura 2·5 Diagrama deta l la do del mecanismo de sujeción de la figura 2·4: a) eslabónbase, b) eslabónde conexión, e) manija, el) barra de sujeción.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 52/508
40 TEORÍA DE MÁQUINAS Y MECANISMOSEn vista de que es ¡;tecesario. asociar las po.sicio.nes relativas de lo.s centro.s dearticulación sucesivo.s, se definen lo.s vecto.res de diferencia de po.sición RAD eneleslabón 1, RBA en el eslabón 2, ReB en el eslabón 3 y Roc en el eslabón 4. También
se hace no.tar aqui que cada uno. de esto.s vecto.res parece ser co.nstante a lo.s o.jo.s deun o.bservado.r que se encuentre fijo. en el sistema de co.o.rdenadas de ese eslabón enparticular; las magnitudes de esto.s vecto.res se pueden o.btener a partir de las dimensio.nesco.nstantes de lo.s eslabo.nes.También es factible escribir una ecuación vectorial para describir las restriccio.nesimpuestas por cada articulación de revo.luta (de pasado.r). Nótese que seacual fuere la Po.sición o. el o.bservado.r seleccio.nado.s, lo.S do.s punto.s quedescriben
a cada centro. de pasado.r, po.r ejemplo., Al y A2, siguen siendo. co.incidentes. Po.rco.nsiguiente,RAZA¡ = RB3BZ = RC4C) = RD¡D4 = O (2-11)Desarro.llemo.s aho.ra las ecuacio.nes vecto.riales para la posición abso.luta decada uno. de lo.s centro.s de pasado.r. Puesto. que el eslabón 1 es el marco. de referencia,las po.sicio.nes abso.lutas so.n aquellas definidas en relación co.n un o.bservado.ren el sistema de co.o.rdenadas 1. Po.r supuesto., el punto. Al se Io.caliza en la po.sicióndescrita po.r RA A co.ntinuación se establece una co.nexión matemática deleslabón 2 co.n el 1 mediante la expresión
(a)Después de efectuar la transferencia al o.tro. extremo. del eslabón 2, se fija eleslabón 3RB =RA +RBAAl co.nectar las articulacio.nes e y D en la misma fo.rma se o.btieneRc = RB + RCB = RA + RBA + RCBRD = Rc + Roc = RA + RBA + RCB + RocPo.r último., se transfiere de regreso. al punto. A a través del eslabón 1RA = RD + RAD = RA + RBA + ReB + Roc + RADy de esto. se o.btiene(b)(c)
(d)(e)(2-12)Esta impo.rtante expresión se co.no.ce co.n el no.mbre de ecuación de cierre delcircuito. para la mo.rdaza. Co.mo. se muestra en la figura 2-6, expresa el hecho. deque el mecanismo. fo.rma un circuito. cerrado. y, por ende, el poligo.no. co.nstituido.por lo.s vecto.res de diferencia de po.sición que pasan po.r las articulaciones ylo.seslabo.nes sucesivo.s, debe mantenerse cerrado. cuando. el mecanismo. se mueve.Laslo.ngitudes co.nstantes de ésto.s vecto.res aseguran que lo.s centros de articulac
iónpermanezcan separado.s a distancias constantes, que es el requisito de los eslabo.nes

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 53/508
POSICIÓN Y DESPLAZAMIENTO 41Figura 2-6 Ecuación de cierre del circuito.rígidos. Las rotaciones relativas entre vectores sucesivos indican los movimientos dentro de las articulaciones de pasador, en tanto que la rotación de cada vector de
diferencia de posición individual manifiesta el movimiento de rotación de uneslabón en particular. Por ende. la ecuación de cierre del circuito se cumple dentro de todas las restricciones importantes que determinan la forma de operación de estamordaza en particular. Constituye una descripción matemática, o modelo, deleslabonamiento, y muchos de los desarrollos posteriores incluidos en el curso de esta obra se basan en este modelo como punto de partida.Por supuesto, la forma de la ecuación de cierre del circuito depende del tipode eslabonamiento de que se trate. Esto se ilustra con otro ejemplo, el mecanismo
de Ginebra o cruz de Malta que aparece en la figura b-.7. Una de las primerasaplicaciones que se hicieron de este mecanismo fue para evitar el dar cuerda ex- Rueda de GinebraFigura 2-7 Mecanismo de Ginebra o cruz de Malta.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 54/508
42 TEORÍA DE MÁQUINAS Y MECANISMOScesiva a un reloj. Hoy en día se emplea profusamente como dispositivo divisor, por ejemplo, en una fresadora con cambiador automático de herramienta.Aunque el armazón del mecanismo, el eslabón 1 , no se muestra en la figura,constituye una de las piezas importantes del mismo porque mantiene a los dos eje
scon los centros A y B a una separación constante. Por lo tanto, se define el vectorRBA para indicar esta dimensión. La manivela izquierda, eslabón 3, va unida a uneje que casi siempre gira a velocidad constante y lleva un rodillo en e, que corredentro de la ranura de la rueda de Ginebra. El vector RAC tiene una magnitud constanteigual a la longitud de la manivela, que es la distancia del centro del rodillo e hasta el centro del eje A. La rotación de este vector en relación con el eslabón 1 seutilizará más adelante para describir la velocidad angular de la manivela. El eje Xz
se alinea a lo largo de una ranura de la rueda; de donde, el rodillo está obligadoamoverse dentro de dicha ranura, y el vector RC/2 gira igual que la rueda, el eslabón2. Del mismo modo, su longitud variable ARC{2 muestra el movimiento de deslizamientorelativo que se lleva a cabo entre el rodillo del eslabón 3 y la ranura deleslabón 2.Basándose en la misma figura, se ve que la ecuación de cierre del circuito paraeste mecanismo esRBA + RC/2+ RAc = O (2-13)Nótese que el término RC{2 es equivalente al RcB' puesto que el punto B es el origen
del sistema de coordenadas 2.Esta forma de la ecuación de cierre del circuito es un modelo matemáticoválido en tanto el rodillo e se mantenga dentro de la ranura, a lo largo de Xl. Sinembargo, esta condición no se cumple en el curso completo del ciclo del movimiento.Una vez que el rodillo sale de la ranura, el movimiento se controla por mediod6 dos arcos circulares pareados en los eslabones 2 y 3. Asi pues, para esta porcióndel ciclo se requiere una nueva forma de la ecuación de cierre del circuito.Por supuesto, los mecanismos se puc,den conectar de tal modo que se forme
una cadena cinemática de varios circuitos; en cuyo caso se requerirá más de unaecuación de cierre del crrcuito para representar al sistema en su totalidad. No obs'tante, los procedimientos para obtener las ecuaciones son idénticos a los que seilustraron en los ejemplos anteriores.2-7 ANÁLISIS GRÁFICO DE LA POSICIÓNDE MECANISMOS PLANOSCuando las trayectorias de los puntos móviles de un mecanismo se encuentran enun solo plano o en planos paralelos, se le asigna el nombre de mecanismo plano.Puesto que una porción substancial de las investigaciones incluidas en esta obra serelacionan con mecanismos planos, queda plenamente justificado el desarrollode métodos especiales adecuados para este género de problemas. Como se verá en
la sección siguiente, la naturaleza de la ecuación de cierre del circuito lleva a menu-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 55/508
POSICIÓN Y DESPLAZAMIENTO 43do a la resolución de ecúaciones simultáneas no lineales, cuando se sigue un planteamientoanalítico que con frecuencia resulta abrumador. Con todo, particularmenteen el caso de mecanismos planos, si se sigue un método gráfico, la soluciónes casi siempre directa.
En primer lugar se hará una revisión sucinta del proceso de la adición vectorial.Dos vectores A y B cualesquiera conocidos se pueden sumar gráficamentecomo se ilustra en la figura 2-8a. Según la escala seleccionada, los vectores setrazan haciendo coincidir la punta de uno con el origen del otro, en cualquier ordeny su suma e se identifica como C=A+B B+A (2-14)Nótese que se usan tanto las magnitudes como las direcciones y sentidos de losdos vectores A y B para efectuar la adición, y que tanto la magnitud como la dirección(y sentido) de la suma e se encuentran como parte del resultado.La operación de la sustracción vectorial gráficamente se ilustra en la figura2-8b, en donde los vectores se trazan con sus puntas coincidentes, para resolver
laecuación A C-B (2-15)Estas operaciones vectoriales gráficas se deben estudiar con gran cuidado y comprendercon toda claridad, ya que se emplean con amplitud en todo este texto.(a)(blfigura 2·8 a) Adición de vectores. b) Sustracción de vectores.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 56/508
44 TEORíA DE MÁQUINAS Y MECANISMOSUna ecuación vectorial tridimensional C=D+E+B (a)se puede dividir en componentes a lo largo de cualesquiera ejes convenientes, lo que lleva a las tres ecuaciones escalares: ez DZ +Ez + BZ (b)Puesto que son componentes de la misma ecuación vectorial, estas tres expresiones
escalares deben ser coherentes. Si sucede que, al mismo tiempo, las tres son linealmenteindependientes, se pueden resolver en forma simultánea para las tres incógnitas,que pueden ser tres magnitudes, tres direcciones t o cualquier combinaciónde tres magnitudes y direcciones. Sin embargo, para algunas combinaciones elproblema es marcadamente no lineal y muy dificil de resolver. Por lo tanto, el estudiodel problema tridimensional se demorará hasta el capítulo 11, que es cuandose necesitará.Una ecuación vectorial bidimensional se puede resolver para dos incógnitas:dos magnitudes, dos direcciones o una magnitud y una dirección. En algunas circunstancias
es conveniente indicar las cantidades conocidas CV) y las desconocidas(o) arriba de cada vector en una ecuación, como sigue:vv ,,'v v'o C=D+E+B (e)en donde el primer símbolo (\1 u o) colocado arriba de cada vector indica su magnitudy el segundo su dirección. Otra forma equivalente es0'1/ '1/'1/ '1/'1/ 'l/ocC=OO+EE+BB (d)Cualquiera de estas ecuaciones identifica con claridad las incógnitas y señala si se puede llegar a una solución. En la ecuación (e), los vectores D y E están definidospor completo y se pueden sustituir con su suma:A=D+E (e)
. to que da C=A+B (2-16)De la misma manera, cualquier ecuación vectorial en el plano, si puede resolverse, podrá reducirse a una expresión de tres términos con dos incógnitas.Dependiendo de las formas de las dos incógnitas, es factible encontrar cuatrot N. del R. T. En la literatura en inglés sobre la materia se aplica la palabra dirección implicandotambién la idea de sentido (como se aplica en las obras correspondientes en español). Dada la frecuenciacon la que se manejará tal concepto en este texto, y con el fin de no complicar laredacción del mismo,se usará el término dirección con la connotación mencionada.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 57/508
POSICIÓN Y DESPLAZAMIENTO 45casos distintos. Chacet ,:j: los clasifica de acuerdo con las incógnitas; es decir, loscasos y sus incógnitas correspondientes son:Caso 1 Magnitud y dirección del mismo vector, por ejemplo, e, C.Caso 2a Magnitudes de dos vectores diferentes, por ejemplo, A, B.
Caso 2b Magnitud de un vector y dirección de otro, por ejemplo, A, B.Caso 2e Direcciones de dos vectores diferentes, por ejemplo, Á, B.Se ilustrarán gráficamente las soluciones de estos cuatro casos en esta sección y, enla siguiente, aplicando un método analítico.En el caso 1 las dos incógnitas son la magnitud y la dirección del mismo vector.Este caso se puede resolver mediante la adición o la sustracción gráficas directasde los vectores restantes, que estén completamente definidos. Esta situación seilustró en la figura 2-8.Para el caso 2a se deben encontrar dos magnitudes, por ejemplo, A y B",,:,,' oY oVC=A+B (2-17)La solución de este caso se muestra en la figura 2-9, y los pasos comprendidos son
los siguientes:1. Se elige un sistema de coordenadas y u:p. factor de escala, y se traza el vector C.2. Se traza una recta que pase por el origen de C, paralela a Á.t Milton A. Chace, Development and Application oj Vector Mathematics jor Kinematic Analysis ojThree-Dimensional Mechanisms, tesis de doctorado, Universidad de Michigan, Ann Arbor, Mich.,1954, p. 19.t Véase la tabla 11-1 en donde aparecen todos los casos.(a) (b) I.. Figura 2-9 Solución gráfica del caso2a. (a) dados: e, Á y B; b) solución
paraAyB.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 58/508
46 TEORÍA DE MÁQUINAS Y MECANISMOS3. Se traza otra recta que pase por el extremo de e paralela a B.4. La intersección de estas dos rectas define ambas magnitudes, A y B, que puedenser positivas o negativas.Se observa que el caso 20 tiene una solución única a menos que las rectas seancolineales; si son paralelas, pero distintas, las dos magnitudes, A y B, son inf
initas.Para el caso 2b se encuentra una magnitud y una dirección de vectores distintos,póngase por caso, A y B ,vv 1)'1/ voC=A+B (2-18)La solución, que se presenta en la figura 2-10, se obtiene en el orden que se indicaa continuación:1. Se elige un sistema de c.Oordenadas y un factor de escala, y se traza el vector C.2. Se traza una recta que pase por el origen de e paralela a Á.3. Se ajusta un compás con la magnitud de B, de acuerdo con la escala elegida, y
se construye un arco circular cuyo centro se localice en el extremo de C.4. Las dos intersecciones de la recta y el arco definen los dos conjuntos de soluciónA, B y A', B'.Por último, para el caso 2c, se encuentran las direcciones de dos vectores,ÁYBvv Vo VoC A +B (2-19)Los pasos de esta solución se muestran en la figuras 2-11.B(a) (b)y'o-- -x
Figura 2-10 Solución gráfica delcaso 2b: a) dados e, Á, y B; b)solución paraA, B y A', B'.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 59/508
POSICIÓN Y DESPLAZAMIENTO 47yB(a)Figura 2-11 Solución gráfica del caso 2e: a) dados: C, A y B; b) solución para Á, B y Á',8/,
1. Se elige un sistema de coordenadas y un factor de escala, y se traza el vector C.2. Se traza un arco circular de radio A con centro situado en el origen de C.3. Se traza un arco circular de radio B con centro localizado en el extremo de C.4. Las dos intersecciones de estos arcos definen los dos conjuntos de soluciones Á, D y Á', D'. Se observ&rá que es factible encontrar una solución real sólo siA+B2:.C.Ahora se aplicarán estos procedimientos para resolver la ecuación de cierre delcircuito. Para ilustrar la situación, considérese el mecanismo de corredera·manivela ilustrado en la figura 2-12a. En estas circunstancias, el eslabón 2 es un
amanivela restringida a girar en torno al pivote fijo A; el eslabón 3 es la biela yeleslabón 4, la corredera. La ecuación de cierre del circuito, que se obtiene aplicandoel método de la sección 2-6, esRc = RBA +RcB (f)El problema del análisis de posición es determinar los valores de todas lasvariables de posición (las posiciones de todos los puntos y articulaciones) dadaslas dimensiones de cada eslabón, y el valor (o valores) de la variable independiente(o variables independientes), es decir, aquellas que se escogen para representarel
grado (o grados) de libertad del mecanismo. En el mecanismo de correderamanivela,cuando la corredera se desplaza a una ubicación conocida Rc, es precisoencontrar los ángulos desconocidos e2 y e3, las direcciones de RBA y RCB' Despuésde identificar l as dimensiones conocidas de los eslabones ,\Iv v'" VnRe = RBA +RcB (g)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 60/508
48 TEORtA DE MÁQUINAS Y MECANISMOS(a)Figura 2-12 a) Mecanismo de corredera-manivela. b) Análisis gráfico de la posición.se reconoce que se trata del caso 2c de la ecuación de cierre del circuito. El procedimientográfico de resolución que se explicó con anterioridad se aplica en la
figura 2-12b. Nótese que se encuentran dos soluciones posibles, (}z. 93 Y 8í. 9;, quecorresponden a dos configuraciones diferentes del eslabonamiento, es decir, dosmaneras de ensamblar los eslabones, siendo ambas coherentes con la posición dadade la corredera. Estas dos soluciones son raices igualmente válidas para la ecuación de cierre del circuito, y es necesario escoger entre ambas, según la aplicación deque se trate.Como ejemplo adicional, véase el eslabonamiento de cuatro barras ilustradoen la figura 2-13. En este caso se desea encontrar la posición del punto del acopladorP correspondiente a un ángulo de la manivela en particular, 82 La ecuación
de cierre del circuito esVV VQ VV VaRBA + RCB = RDA + RCD (h)Figura 2-13 Eslabonam iento decuatro barras.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 61/508
POSICIÓN Y DESPLAZAMIENTO 49Figura 2·14 Análisis gráfico deposición del eslabonamiento decuatro barras.y la posición del punto P está dada por la ecuación de diferencia de posición00 vV Vo
Rp:O RBA +RpB (OAunque parece que esta ecuación tiene tres incógnitas, se pueden reducir a dos después de resolver la ecuación de cierre del circuito (h), observando la relación angularconstante entre RpB y RCB ü)La resolución gráfica de este problema se inicia combinando los dos términosconocidos de la ecuación (h), localizando así las posiciones de los puntos B y D,como se muestra en la figura 2-14,'l/V Vv Vo v",S = RDA -RBA = RCB -RCD (k)Se aplica entonces el procedimiento de resolución para el caso 2e, dos direcciones
desconocidas, para encontrar la ubicación del punto C; y se obtienen dos solucionesposibles, 83, 84 Y 8';, 84,A continuación se aplica la ecuación (j) para determinar las dos direccionesposible de RPB Luego se puede resolver la ecuación (0, siguiendo los procedimientos para el caso 1. Por último se obtienen dos soluciones para la solución del puntoRp y Rp; y ambas son soluciones válidas para las ecuaciones (h) a (J); aunquepudo suceder que la posición Rp no se lograra físicamente a partir de la configuración ilustrada en la figura 2-13, sin desmontar el mecanismo.Partiendo de los ejemplos de la corredera-manivela y el eslabonamiento de
cuatro barras, es obvio que el análisis gráfico de la posición requiere precisamentede las mismas construcciones que se elegirían por razones naturales al dibujar a es·cala el mecanismo en la posición que se está considerando. En virtud de esto, elprocedimiento se antoja trivial y parecería que no merece en realidad el título de

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 62/508
50 TEORÍA DE MÁQUINAS Y MECANISMOSanálisis; sin embargo, esto suele ser en extremo engañoso . Como se verá en lassiguientes secci ones, el análisis de posición de un mecanismo es un problema algebraicono lineal cuando s e trata por métodos analíticos o de computadora. Adecir verdad, constituye el problema más difícil dentro del análisis cinemático y esta
..s la razón primordial por la que las técnicas gráficas de resolución han conservaaosu atractivo dentro del análisis de los mecanismos planos.2-8 SOLUCIONES DE ÁLGEBRA COMPLEJA DEECUACIONES VECTORIAI.ES EN EL PLANOEn problemas en el plano, con frecuencia conviene expresar un vector especificandosu magnitud y dirección en notación polarR=RaEn la figura 2-15a, el vector bidimensionalR = Rxi+RYjtiene dos componentes rectangulares de magnitudesRX = R cos 8 RY = R senO
siendo(2-20)(2-21)(2-22)(2-23)Se observará que aquí se eligió arbitrariamente aceptar la raíz cuadrada positivapara la magnitud R al calcularla a partir de las componentes de R. Por consiguiente,se debe tener sumo cuidado al interpretar los signos de RX y RY por separado aldecidir lo referente al cuadrante de (J. Nótese que (J se define como el ángulo quevadel eje positivo x al extremo positivo del vector R, medido en torno al origen del
vector, y es positivo cuando se mide en sentido contrario al movimiento de lasmanecillas del reloj.y(a) (b)Figura 2-15 Correlación de los vectores en el plano y los números complejos.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 63/508
POSICIÓN Y DESPLAZAMIENTO 51y A=lOl1Q:C=A+B= 16.6/10.1 oFigura 2-16 Ejemplo 2-2.Ejemplo 2-2 Exprésense los vectores A = 10/300 Y B = 8/-15° en notación rectangulart y
hállesesu suma.SOLUCiÓN Los vectores se muestran en la figura 2-16 y son:A = 10 cos 300 I + 10 sen 30° j = 8.661 + 5.00jB = 8 cos (-15°) 1 + 8 sen(- W) j = 7.731 2.07JC = A + B = (8.66+7.73)1 + (5.00-2.07)j= 16.39l + 2.93jLa magnitud de la resultante se calcula tomando como base la ecuación (2-23)e = V 16.39' + 2.932 16.6al igual que el ángulo0- t -, 2.93 - an 10.1° 16.39El resultado final en notación para el plano es
C = 16.6/10.1° Resp.Otra manera de abordar analiticamente los problemas vectoriales bidimensionaleses a través del álgebra compleja. Aunque los números complejos no sonvectores, se pueden usar para representar vectores en un plano, eligiendo un origeny los ejes real e imaginario. En los problemas dnemáticos bidimensionales, estosejes se pueden escoger según convenga para que coincidan con los ejes x¡y¡ del sistema absoluto de coordenadas.Como se ilustra en la figura 2-15b, la localización de cualquier punto en elplano se puede especificar ya sea por su vector de posición absoluta o mediante suscoordenadas real e imaginaria correspondientes
R= R' + jRYen donde el operador j se define como el número imaginario unitarioj Y-l(2-24)(2-25)t Muchas calculadoras están equipadas para realizar directamente conversiones polares a rectangularesy viceversa.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 64/508
52 TEOR1A DE MÁQUINAS Y MECANISMOSLa utilidad real de los números complejos en el análisis en el plano se debe ala facilidad con la que se pueden pasar a la forma polar. Si se usa la notación complejarectangular para el vector R, se puede escribirR = RI e = R cos e + jR sen e (2-26)
Sin embargo, si se emplea la por lo demás bien conocida ecuación de Euler de latrigonometría,e"j8 cos O ±j senOR también se puede e scribir en la forma polar compleja comoR= Rej(J(2-27)(2-28)en donde la magnitud y la dirección del vector se indican explicitamente. Como severá en los dos capítulos siguientes, la expresión de un vector en esta forma esmuy útil cuando es necesario derivar.Se obtendrá cierta familiarización con las útiles técnicas de manejo de vectoresescritos en las formas complejas polares, resolviendo una vez más los cuatro casos
de la ecuación de cierre del circuito. Si la ecuación (2-16) se expresa en la formacompleja polar se obtieneEn el caso 1, las dos incógnitas son e y Oc. La resolución se inicia separando laspartes real e imaginaria; y luego, mediante la sustitución de la ecuación de Euler(2-27), se obtieneC(cos ec + j sen ec) = A(cos eA + j sen OA) + B(cos eB + j seneB) (a)Al igualar los términos reales e imaginarios por separado, se obtienen dos ecuacionesreales correspondientes a las componentes horizontal y vertical de la ecuaciónvectorial bidimensional:e cos Oc = A cos OA + B cos 08e sen Be = A sen 8 A + B sen BB
(h)(e)Si se elevan al cuadrado y suman estas dos expresiones se elimina Oc Y se encuentrauna solución para e(2-30)La raíz cuadrada positiva se escogió arbitrariamente; la raíz cuadrada negativadaría una solución negativa para e con una diferencia de 1800 en Oc. El ánguloOc se encuentra como sigue(J = tan-I A sen eA + B sen eBe A cos OA + B cos eB (2-31)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 65/508
POSICIÓN Y DESPLAZAMIENTO 53en donde los signos del numerador y el denominador se deben considerar porseparado al determinar el cuadrante apropiadot de Oc. Sólo se encuentra unasolución para el caso 1 , como se ilustró con anticipación en la figura 2-8.Para el caso 2a las dos incógnitas de la ecuación (2-29) son las dos magnitudesA y D. En este caso la solución gráfica es la que se dio en la figura 2-9. Una
manera conveniente de resolverlo en la forma compleja polar es dividir primero laecuación (2-29) entre ei6A(d)Si se compara esta ecuación con la figura 2-17, se ve que la división entre la forma compleja polar de un vector unitario ej6,.. tiene el efecto de hacer girar los ejes reale imaginario en el ángulo (}A, de tal suerte que el eje real queda a lo largo delvectorA. Ahora es factible usar la ecuación de Euler (2-27) para separar las componentes
real e imaginaria.C cos (lJe - (JA) = A + B cos «(JB lJA)C sen (lJe - OA) = B sen «(JB - eA)(e)(f)y se observa que el vector A, que ahora es real, se eliminó de una de las ecuaciones.La solución para B se encuentra con facilidad:(2-32)La solución para la otra magnitud desconocida, A, se calcula exactamente de lamisma manera. Si la ecuación (2-29) se divide entre ei8B, el eje real se alinea alot Las calculadoras de diferentes marcas varían entre sí en lo que respecta al manejo
de las unidades yel cuadrante de los ángulos. Es necesario que cada persona se familiarice con lascaracteristicas de supropia calculadora.imaEgjein ario(a)EjerealEjelb) realimaEgjein arioF1gura 2-17 Rotación de los ejes mediante la división de la ecuación compleja polar en
tre ..". a) Ejesoriginales, b) ejes después de la rotación.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 66/508
54- TEORíA DE MÁQUINAS Y MECANISMOSlargo del vector B. Luego, la ecuación se separa en las partes real e imaginaria yseobtieneA = Csen(Oc - OB)
sen(OA - 8B)Al igual que antes, el caso 2a ofrece una sola solución.(2-33)La solución gráfica para el caso 2b es la que se ilustró en la figura 2- 1 0. Lasdos incógnitas son A y 8B El proceso se inicia alineando el eje real a 10 largo del vector A y separando las partes real e imaginaria, como se hizo en el caso 2a. Lassoluciones se obtienen de un modo directo a partir de las ecuaciones (e) y U)O .a + -1 C sen (OC - 8A)B = VA senB
(2-34)(2-35)Nótese que el término del arco seno tiene un doble valor y, por ende, el caso 2bconduce a dos soluciones distintas, A, 8B Y A', 8...El caso 2c tiene como incógnitas a los dos ángulos 8 A Y OB. La solución gráficase presentó en la figura 2- 1 1 . En esta situación se alinea el eje real a lo largodelvector e,(g)Si se usa la ecuación de Euler para separar las componentes y luego reacomodarlos términos, se obtieneA cos (OA - Oc) = C-B cos (OB - Oc)A sen (8A 8c) = -B sen (6B - 6c)
Las dos ecuaciones se elevan al cuadro y se suman, lo que daN = C2 + B 2 - 2BC cos (8B Oc)(h)(i)Esto se reconoce como la ley de los cosenos para el triángulo vectorial. Esta expresiónse puede resolver para 08 como sigue6c ::¡:: COS..I C2 + B2 - A22CB (2-36)Pasando C al otro miembro de la ecuación (h), antes de elevar al cuadrado y sumarse obtiene otra forma de la ley de los cosenos, según la cual6A C2 + A2 - B1: == Oc ± COS< I
2CA (2-37)Los signos más o menos en estas dos ecuaciones son un recordatorio de que cadauno de los arcos cosenos tienen dos valores y, en consecuencia, cada uno de OB y

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 67/508
POSICIÓN Y DESPLAZAMIENTO 55eA tienen dos soluciones. Estos dos pares de ángulos se suelen combinar naturalmentecomo eA, 08 y eA, O B , bajo la restricción expresada en la ecuación (l) antescitada. Por ende, el caso 2c ti,ne dos soluciones distintas, como se ilustra enla
figura 2-1 1 . -2-9 SOLUCIONES DE CHACE PARA ECÜACIONESVECTORIALES EN EL PLANOComo se vio en la sección previa, el álgebra aplicada para resolver incluso lasecuaciones vectoriales en el plano más simples suele hacerse en extremo abrumadora.Chace fue el primero en aprovechar la brevedad de la notación vectorial enla obtención de soluciones explícitas en forma cerrada, tanto para ecuaciones vectorialesbidimensionales como tridimensionales. t En esta sección se estudiarán sussoluciones para ecuaciones en el plano, por lo que respecta a los cuatro casos de la
ecuación de cierre del circuito. Las soluciones tridimensionales se expondrán en elcapitulo 1 1 , que se ocupa de los mecanismos espaciales.Aquí se volverá a usar la ecuación (2-16), que es la expresión vectorial típicaen el plano, que dada en términos de magnitudes y vectores unitarios se puede escribircomo siguece AA+ B 8 (2-38)y puede contener dos incógnitas consistentes en dos magnitudes, dos direcciones ouna magnitud y una dirección.El caso 1 es la situación en el que la magnitud y la dirección del mismo vector,por ejemplo , e y e, constituyen las dos incógnitas. El método de solución para estecaso se ilustró en el ejemplo 2-2. La forma general de la solución ese = (A . i + B . bi + (A j + B . j)j (2-39)
En el caso 2a, las incógnitas son las magnitudes de dos vectores diferentes,por ejemplo, A y B. El método de Chace para este caso consiste en eliminar una delas incógnitas tomando el producto escalar de cada vector con uno nuevo escogidode tal manera que se elimine una de las incógnitas. Se puede eliminar el vectorB tomando el producto escalar de cada término de la ecuación con 8 x k.e . (8 x k) = AA . (8 x k) + B8 . (8 x k) (a)Por lo tanto , puesto que 8 x k es perpendicular a 8, 8 ' (8 x k) = O; de donde, A = .. . (.. X ..)A · (B X k) (2-40)t M. A. Chace, "Vector Analysis of Linkages", J. Ef1g. Ind., serie B, vol. 55, no. 3, pp. 289-297,
agosto 1963.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 68/508
56 TEORtA DE MÁQUINAS Y MECANISMOSLa magnitud desconocida B se obtiene del mismo modoe · (Á x k)B = A A AB · (A X k)(2-41 )
Para el caso 2b, las incógnitas son l a magnitud de un vector y la dirección deotro, por ejemplo A y R. La resolución del caso se inicia eliminando a A de laecuación (2-38)e . (Á x k) = BR . (Á x k)Ahora, basándose en la definición del producto escalar de dos vectores,se observa queP . Q = PQ cos q,B R ' (Á x k) = B cos <p(b)(e)en donde q, es el ángulo comprendido entre los vectores R y (Á x k). En consecuencia,
cos q, = R . (Á x k) (d)Los vectores Á y Á x k son perpendiculares entre sí y, por ende, se está en libertadde elegir otro sistema de coordenadas iíl que tenga las direcciones i = Á x k yíl = Á. En este sistema de referencia, el vector unitario desconocido R se puedeescribir comoR = cos q, (Á x k) + sen <p Á (e)Si se hace ahora la sustitución de la ecuación (d) en la (b) y se resuelve para cosq"se obtieneLuego,A.. c · (Á x k)COS 'l' = B (f)(g)
Sustituyendo las ecuaciones (f) y (g) en (e) y multiplicando ambos miembros porlamagnitud conocida B se obtiene(2-42)Para determinar el vector A es posible que se desee aplicar en forma directa laecuación (2-38) y hacer la sustracción vectorial . De otra manera, si se sustituyela (2-42) y se reordena, da(h)Los dos primeros términos de esta ecuación se pueden simplificar como se indicaen la figura 2-1 8a. La dirección Á x k se localiza a 90° en el mismo sentido del

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 69/508
POSICIÓN Y DESPLAZAMIENTO 57A A/fJ. .. A(a) (b)Figura 2-18movimiento de las manecillas del reloj, a partir de la dirección A. La magnitud
C . (A x k) es la proyección de e en la dirección A x k; de donde, cuando se resta dee, [C · (A x k)J(A x k) el resultado es un vector de magnitud c · A en la direcciónA. Con esta sustitución, la ecuación (h) se convierte en(2-43)Finalmente, en el caso 2c las incógnitas son las direcciones de dos vectoresdiferentes, por ejemplo A y B. Este caso se ilustra en la figura 2- 1 8b, en donde sedan el vector e y las dos magnitudes A y B. El problema se resuelve encontrandolos puntos de intersección de dos círculos de radios A y B. El proceso se iniciadefiniendo un nuevo sistema de coordenadas Xp. cuyos ejes se dirigen de tal modo
que X = e x k y p. = e, como se muestra en la figura. Si las coordenadas de unodelos puntos de intersección en el sistema Xp. se designan como u y v, entonces ,A = u X + v p. y B=-uX+(C v)p.La ecuación del círculo de radio A esEl círculo de radio B tiene la ecuacióno bien,u2 + v2 - 2Cv + Cl = B2Al restar la ecuación (k) de la (¡) y resolviendo para v se obtienev = A l B2 + C2 2C(i)(k)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 70/508
58 TEORIA DE MÁQUINAS Y MECANISMOSAl sustituir esto en la (¡) y después de resolver para u dau = ±-yI A2 (A2 B2+ C2)2 2C (m )El paso final consiste en sustituir estos valores de u y v en las ecuaciones (1)yreemplazar ). y Jl según sus definiciones . Los resultados son
A = ±..A2_ (A2_:.+ C)2 (C X k) + A2_:.+ C2 CB = +.. A2 - (A2-:.+ czy (C x k) + B2-:.+ C2 C2-10 ANÁLISIS ALGEBRAICO DE LA POSICIÓNDE ESLABONAMIENTOS PLANOS(2-44)(2-45)Esta sección ilustra varios métodos algebraicos para abordar el análisis de posiciónde mecanismos planos. Las tres principales ventajas de estos, en comparación conel planteamiento gráfico de la sección 2-7, son 1) la mayor exactitud que se puedelograr, 2) el hecho de que son apropiados para hacer las evaluaciones en computadorao calculadora y 3) el hecho de que una vez que se encuentra la forma de
la solución, se puede evaluar para cualquier conjunto de dimensiones O posicionesdiferentes de los eslabones, sin necesidad de reiniciar el proceso. Como se verá,laprincipal desventaja es que la naturaleza de las ecuaciones suele conducir a manipulacionesalgebraicas tediosas para encontrar la forma de la solución.Regresemos al análisis del mecanismo de corredera-manivela ilustrado en lafigura 2-12, que se resolvió gráficamente en la sección 2-7. Una de las maneras máscomunes de plantear este problema desde el punto de vista algebraico es observar en la figura que la posición vertical del punto B se puede relacionar con la longitudy el ángulo del eslabón 2, o bien, del 3. Por consiguiente
de modo quesen (h =Asimismo, por la geometría de la figura 2-12a, es evidente queRc = RBA cos ()2 + RCB cos ()3que se puede reordenar para que quedeRc RBA cos ()2 RCB tos ()3(a)(b)(e)(d)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 71/508
POSICIÓN Y DESPLAZAMIENTO 59Luego, elevando al cuadrado las ecuaciones (a) y (d), se elimina la incógnita 83R .. - 2ReRBA COS 82 + R ..A = Rh (e)Esta ecuación se puede resolver para el ángulo desconocido e2 como una funciónde la posición de la corredera Re,e - -1 R.. + R ..A - R h
2 - cos2RcRBA(2-46)Sustituyendo este resultado en la (d) se obtiene una ecuación que puede resolverse para el otro ángulo desconocido (h .(h == R2 + Rz - Rz cos-I e CH HA2ReReB(2-47)Aunque trascendentes, se trata de soluciones de forma cerrada que se puedenevaluar rápidamente para cualquier conjunto de parámetros dimensionales encualquier posición Re de la corredera.
En las aplicaciones más usuales del mecanismo de corredera-manivela, se da elángulo de esta última, O2, y lo que es preciso hallar es el ángulo de la biela, 03 y la posición de la corredera Re . Este problema se puede resolver recordando que dadocos (h = ±Yl -sen2 03según la ecuación (b) , se tiene quecos e3 = R1 YR h - R ..A sen2 (hCB (2-48)en donde se eligió la raíz cuadrada positiva de tal modo que corresponda a la figura 2-12a; la raíz cuadrada negativa designa un montaje diferente de los eslabonesen el que el pistón está a la izquierda del punto A . Por lo expresado en las ecuaci
ones(e) y (2-48), la posición del punto e es(2-49) Al inciar el análisis algebraico, es posible que el estudiante se preguntecómose reconocerán las ecuaciones "apropiadas" a partir de la figura, cómo se sabrá endónde buscar o cuándo se tienen las suficientes ecuaciones. Una de las ventajas delmétodo del álgebra compleja de la sección 2-8 es que es una guía en el desarrollode estas ecuaciones iniciales. Haciendo referencia una vez más a la figura 2- 1 2a, sepuede escribir la ecuación de cierre del circuito en la forma polar complejaRe = RBAei92 + RCBei83 (j)en donde Xl se toma como el eje real. Al aplicar la fórmula de Euler (2-27) , se
pueden separar los términos real e imaginario de la ecuación anterior. Las dosecuaciones que resultan son precisamente las que se obtienen de la figura como lasecuaciones (e) y (a) .
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 72/508
60 TEORíA DE MÁQUINAS Y MECANISMOSYa sea que estas ecuaciones se obtengan directamente de la figura o por el usode la ecuación compleja polar de cierre del circuito, el proceso de resolución sepuede desarrollar como se describió antes, recurriendo a las operaciones necesariaspara resolver simultáneamente estas ecuaciones. Sin embargo, con el método del
álgebra complej a, con frecuencia se p uede reconocer la ecuación de cierre del circuitooriginal como uno de los cuatro casos e stándar y, por ende, se escribe inmediatamentela solución basándose en las deducidas en la sección 2-8. Por ejemplo,las ecuaciones (2-46) y (2-47) resultan directamente por la forma de laecuación (j) como caso 2e, y al sustituir los símbolos apropiados en la solución estándar, ecuaciones (2-36) y (2-37) . Del mismo modo, las ecuaciones (2-48) y (2-49)son ejemplos del caso 2b y pudo hallarse directamente de las ecuaciones (2-34) y (2-35) .
Para resolver el mismo problema aplicando el método de Chace, se principiaescribiendo la ecuación de cierre del circuito basándose en la figura 2-1 2a(g)Si se da O2 las incógnitas de esta ecuación son la magnitud Re y la dirección ReB La solución corresponde al caso 2b y se encuentra haciendo las sustitucionesapropiadas en las ecuaciones (2-42) y (2-43) ,ReB - [RBA (Re x k)](Re x k) + YRh [RBA (Re x k)]2 ReRe = [RBA Re + y Rh - [RBA (Re x k)f]lle(2-50)(2-5 1)Ejemplo 2·3 Úsense las ecuaciones d e Chace para encontrar la posición d e la corredera ilustradaen la figura 2- 1 2, siendo RB1 = 25 mm. RCB 75 mm. y 8, = 1 50°.
SOLUCIÓN Poniendo los datos en forma vectorial se tieneRs., = 25{cos 150)1 + 25(sen 1 50)j = -2 1 .71 + 12.5j RCR = 75 Rc = iNótese que Rr x k = Asi pues, después de las sustituciones en la (2-51) daRc = {(-2 1 .7¡ + 12...j) . ¡ + V(75)' - [(-21 .7¡ + 1 2.51> · M í= 50.21 mm Resp.El análisis del eslabonamiento de cuatro barras es un problema clásico cuyasolución data desde hace poco más de un siglo . La solución gráfica se ilustró en lasfiguras 2-1 3 y 2-14. Este mismo problema se presenta aquí para ilustrar con mayor amplitud las técnicas algebraic as de solución, y la notación utilizada se define en lafigura 2-19.
En esta ilustración se observa que s es la distancia diagonal BD. Se puede escribirla ley de los cosenos para el triángulo BAD y, una vez más, para el triánguloBCD. En términos de las longitudes de los eslabones y los ángulos definidos endicha figura, se tiene

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 73/508
POSICIÓN Y DESPLAZAMIENTO 61s = V ri + d 2rl r2 cos fh (h)r2 + r2 S 2 ± COS.. 1 3 2r34r 4 (i)en donde los signos más o menos se refieren a las dos soluciones para el ángulo detransmisión 'Y y y', respectivamente. La ley de los cosenos se puede volver a escribir
para los mismos dos triángulos con el fin de hallar los ángulos <p y "" ,2 2 2 A. - 1 r l + s - r2 '1' = cos 2rlS (j)(k)en donde se observa, como lo seftala la figura, que las magnitudes de <p y "" sonmenores que 1 800 , Y que "" siempre es positivo en tanto que sen <p lleva el mismosigno que sen 82 Con base en esto se encuentran los ángulos desconocidos 83 y 84 84= 1 80o - <p + 1/!(h = 84 - 'Y(2-52)(2-53)
en donde los signos menos o más representan una vez más, respectivamente, lasdos cerraduras 84 y 04,Para resolver el mismo problema aplicando el método de Chace, primero seconstruye el vectorLuego, el triángulo BCD da la ecuación vectorials = r3r3 r4r4(1)(m)en donde se desconocen las dos direcciones r3 y r4 . Este es el caso 2e y las solucionesestán dadas por las ecuaciones (2-44) y (2-45) . Después de efectuar las sustitucionescorrespondientes da
r3 ±..d- (d-;!+ s)\s x fc.) + d ;!+ s\ (2-54)(2-55)El conjunto superior de signos proporciona la solución para el eslabonamientocruzado ; y, por ende, el conjunto inferior se aplica al eslabonamiento abiertode lafigura 2-19.Al resolver el mismo problema con álgebra compleja, se podría adaptar lasolución estándar del caso 2e, como se hizo antes. No obstante, si no se hace así,ilustrará algunas técnicas útiles de manipulación. Se principia escribiendo la
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 74/508
62 TEORIA DE MAQUINAS Y MECANISMOSXlFigura 2-19D Xl(b)ecuación de cierre del circuito en la forma compleja polar. Con la notación de la
figura 2- 1 9 se tiene que(n)en donde se elige Xl como el eje real. Si se aplica la fórmula de Euler, se separanlas partes real e imaginaria de la ecuaciónT2 cos (J2 + T) cos (h = rl + T4 COS (}4r2 sen (}2 + T} sen (h = r4 sen 84(o)(p )en donde los ángulos (h y 84 son las dos incógnitas. A continuación se reacomodanestas ecuaciones para aislar los términos en 83r3 cos (}3 r4 cos 84 - r2 COS 82 + TI
T} sen (}3 r4 sen 84 - T2 sen (}2y se elevan al cuadrado y suman ambas ecuacionesd = d + d + d + 2T1T4 COS (J4 - 2Tl r2 COS 82 2T2r4 COS «(J4 - (2) (q)eliminando así a la incógnita 83 Se puede combinar u n cierto número de las cantidades conocidas de estaecuación y reducir su complejidad observando que, de acuerdo con la figura,S X= TI - r2 cos 82S y = - T2 sen (}z-1 d + d- d-d+ 2rl T2 cos (}2y = cos2 T3r4(r)
(s)(2-56)en donde esta última ecuación es equivalente a las (h) e (1), antes mencionadas .Después de hacer las sustituciones y reacomodar, la (q) se reduce a

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 75/508
POSICIÓN Y DESPLAZAMIENTO 63(t)Al manejar tanto el seno como el coseno del mismo ángulo desconocido enuna sola ecuación, a veces conviene sustituir las identidades de la mitad de un ánguloque se deducen en la trigonometría,
1 tan! (r¡/2)cos 1/ =1 + tan2 ( r¡/2) sen 1/2 tan (1//2)1 + tan2 ( 1//2)(2-57)Al hacer las sustituciones correspondientes en la (t) , se eliminan las fracciones y sereacomodan los términos , se obtiene una ecuación cuadrática,('4 - '3 cos l' - SX) tan2 ..4 + 2sY tan ..4+ ('4 - '3 COS l' + SX) = O (u)de la que se llega a dos soluciones
t84 -$Y ::¡: Y($y)2 - d + 2'3'4 COs l' - d cos2 l' + (sx)2 (v) an - =2 '4 - '3 COS l' - SXCuando se hacen las sustituciones de lo expresado en (r), (s) y (2-56), esto sereduceaPor consiguiente,tan84 -sY ::¡: T3Y1 cos2 l'2 T4 - r3 COS 1' - S x(w)(2-58)Se puede hallar la solución para la otra incógnita, el ángulo 83, siguiendo un
procedimiento completamente análogo. Al aislar los términos en 94 de las ecuaciones(o) y (P) antes de elevar al cuadrado y sumar, se elimina 94 y queda unaecuación cuadrática que puede resolverse para 83 La solución es(2-59)Una vez resuelto el eslabonamiento de cuatro barras básico, se busca una expresiónpara la posición del punto P del acoplador. De la figura 2-1 9 y utilizandola notación compleja polar, se escribe(2-60)Esto se reconoce ..omo caso 1 porque Rp y 86 son las dos incógnitas. Se puedenencontrar directamente las soluciones aplicando las ecuaciones (2-30) y (2-3 1 ),Rp = y,.. + d + 2'2'5 cos ( 83 + a - (2)
8 - t -1 T2 sen 9z + rs sen ( 83 + a - 8z)6 - an'2 cos (}z + T5 cos ( 83 + a - (2)(2-6 1 )(2-62)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 76/508
64 TEORíA DE MÁQUINAS Y MECANISMOSSe observa que estas dos ecuaciones dan valores dobles que provienen de los valoresdobles para (h, y corresponden a las dos cerraduras del eslabonamiento .EJEMPLO 2-4 Calcúlese y trácese la gráfica de l a curva del acoplador d e u n eslabonamiento de
cuatro barras con las siguientes proporciones: r¡ 200 mm, r2 = 1 00 mm, rl '" 250mm, r, =300 mm, " = 1 50 mm, y a -45°. La notación es la que se define en la figura 2-1 9.SOLUCIÓN Para cada ángulo (h, de la manivela, el ángulo de transmisión 'Y se evalúa partiendode la ecuación (2-56). A continuación, se aplica la (2-59) para obtener (J,. Por último, la posicióndel punto del acoplador se calcula aplicando las ecuaciones (2-61 ) y (2-62). Las soluciones paralos primeros ángulos de la manivela se dan en la tabla 2-1 . La curva completa delacopladoraparece en la figura 2-20. N6tese que s610 se calcula y representa gráficamente un
a de las dossoluciones.Tabla 2-1 Cálculo de la curva del acoplador para el ejemplo 2-482, grados 'Y, grados 8" grados0.0 1 8.2 1 10.510.0 1 8.9 99.420.0 2 1 .0 87.830.0 23.9 77.540.0 27.4 69.250.0 3 1 . 3 62.960.0 35.2 58.470.0 39.2 55.280.0 43. 1 53.8
90.0 46.9 5 1 .8Rp, mm2 1 22322452502482412302 1 82051 99
/;l",grados Rj" mm R¡', mm42.636.933.73 1.53Ó.530.73 1 .833.536.338.4162 1 36186 1 39
204 1 362 1 3 1 3 12 1 3 1 26

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 77/508
207 1 231 96 1 2 1182 1 201 66 1 2 11 49 1 1 8Figura 2-20 Gráfica de la curva delacoplador del ejemplo 2-4.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 78/508
POS ICIÓN Y DES PLAZAMIENTO 65Antes de abandonar el tema del e slabonamiento de cuatro barras, consideremosuna vez más la ecuación (2-56) que define al ángulo de transmisión . Alvariar el ángulo de la manivela, 82 , se pueden hallar los extremos del ángulo detransmisión l' derivando la ecuación (2-56) con respecto a fh e igualando el resultado
a cero. Esto demuestra que los extremos ocurren en lJz = O Y 82 = 1 800, Y estándados pord + d - (rl + r..2 d + d - (rl - r..22r3r4< cos l' =:; 2r3r4 (2-63)Por supuesto, lo anterior presupone que la manivela de entrada es capaz de describiruna rotación completa. Si no se trata de una cadena de Grashof (Sec. 1-8) odel tipo de manivela-oscilador o doble manivela, la manivela estará limitada a unintervalo de valores de 82 Fuera de este intervalo, los cálculos presentarán ciertasdificultades; la magnitud del argumento del arco coseno de la ecuación (2-56) serámayor que lá unidad y no se encontrará una solución real para 1'. Los límites de
este intervalo están dados porTi + d - (r3 + r4)2 < 8 < Ti + d - (r3 '4)22rlr2 _ cos 2 - 2 rl r2 (2-64)2-11 DESPLAZAMIENTO DE UN PUNTO EN MOVIMIENTOHasta ahora, este estudio se ha ocupado exclusivamente de una sola posición instantáneade un punto; pero como se desea estudiar el movimiento, es preciso interesarseen la relación entre una sucesión de posiciones.En la figura 2-2 1 , una partícula, situada originalmertte en el punto P, se estámoviendo a lo largo de la trayectoria indicada y, en un instante posterior, llega a laposición Pi. El desplazamiento ARp del punto durante el intervalo de tiempo se
define como el cambio neto de posición,y-..-. ...... p'" ,- .-'"'f- J\ _/.1Rp \.. ..- Trayectoria \ del punto P..... / ¡ p·..--------------------xz(2-65)Flgura 2-21 Desplazam iento de un p unto en mo vimiento
.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 79/508
66 TEORtA DE MÁQUINAS y MECANISMOSEl desplazamiento es una cantidad vectorial que tiene la magnitud y la direccióndel vector que va del punto P al Pi.Es importante hacer notar que el desplazamiento 4Rp es el cambio neto deposición y no depende de la trayectoria particular seguida entre los puntos P y Pi. Su
magnitud no es necesariamente igual a la longitud de la trayectoria (la distanciarecorrida) y la dirección no es necesariamente a lo largo de la tangente a la trayectoria,aunque ambas cosas son verdaderas cuando el desplazamiento es infinitesimalmente pequeño . Ni siquiera es necesario conocer la verdadera trayectoriaseguida entre P y P ' , para poder encontrar el vector desplazamiento, siempre y cuando se conozcan las posiciones inicial y final.2-12 DIFERENCIA DE DESPLAZAMIENTOS ENTRE DOS PUNTOSEn esta sección se estudia la diferencia en los desplazamientos de dos puntos en
movimiento. Se verá en particular el caso en el que los dos puntos móviles son partículasdel mismo cuerpo rígido . Esta situación se ilustra en la figura 2-22, en dondeel cuerpo rigido 2 se mueve desde una posición inicial definida por XZY2Z2 a otraposterior definida por x2ylzí.Según la (2-6) , la diferencia de posición entre los dos puntos P y Q del cuerpo2 en el instante inicial es(a)-Y2..J-:--------------------x,°1ZlFigura 2-221 Diferencia de desplazamiento entre dos puntos del mis..o cuerpo rígid
o.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 80/508
POSICIÚN y DESPLAZAMIENTO 67Después de efectuarse el desplazamiento del cuerpo 2, los dos puntos se localizanen P' y Q'. En ese instante, la diferencia de posición esRpQ = Rp RQ (b)Durante el intervalo de tiempo en el que se desarrolla el movimiento, los dos puntos
sufrieron los desplazamientos individuales ARp y ARQ, respectivamente.Como su nombre lo implica, la diferencia de desplazamiento entre los dospuntos se define como la diferencia neta entre sus desplazamientos respectivos y se le asigna el simbolo ARpQ(2-66)Nótese que esta ecuación corresponde al triángulo vectorial PP *P' de la figura2-22. Como se dijo en la sección anterior, el desplazamiento sólo depende delcambio neto de posición y no de la trayectoria seguida. Por lo tanto, no importacómo se desplazó realmente el cuerpo que contiene a los puntos P y Q, se tiene lalibertad de concebir la trayectoria como se desee. La ecuación (2-66) conduce apensar en el desplazamiento como si se hubiera efectuado en dos etapas. En prime
rlugar, el cuerpo se traslada (se desliza sin rotación) desde X2Y2Z2 hasta xhrzt; enel curso de este movimiento, todas las partículas, incluyendo a P y Q, tienen el mismodesplazamiento ARo- A continuación, se concibe el cuerpo como si girara entorno al punto Q' describiendo el ángulo á(J hasta llegar a la posición final xiyízí.Mediante el manejo de la (2-66) se puede obtener una interpretación diferenteARpQ = (Rp Rp ) - (RQ - RQ)= (Rp - RQ) - (Rp - RQ)y luego, basándose en las ecuaciones (a) y (b),ARpQ = RÍ>Q - RpQ(e)
(2-67)Esta ecuación corresponde al triángulo vectorial Q'P *P' de la figura 2-22 y demuestraque la diferencia de desplazamiento, definida como la diferencia entre dosdesplazamientos , es igual al cambio neto entre los vectores de diferencia de posición.En cualquiera de las dos interpretaciones, se está ilustrando el teorema deEuler, el cual afirma que cualquier desplazamiento de un cuerpo rigido es equivalentea la suma de una translación neta de un punto (Q) y una rotación neta delcuerpo en torno a ese punto. También se ve que sólo la rotación contribuye a la
diferencia de desplazamiento entre dos puntos del mismo cuerpo rigido, es decir, no existe diferencia alguna entre los desplazamientos de dos puntos cualesquiera del mismo cuerpo rígido como resultado de una translación . (Véase la sección 2- 1 3en donde se da la definición del término translación.)En vista de lo antes expuesto, es factible representar la diferencia de desplazamientoARpQ como el desplazamiento del punto P que veda un observadorque se mueve junto, coincidiendo siempre con el punto Q; pero sin girar con el

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 81/508
68 TEORíA DE MÁQUINAS Y MECANISMOScuerpo .. en movimiento, es decir, utilizando siempre los ejes de coordenadas absolutasx¡y¡z¡ para medir la dirección . Es importante entender con claridad ladiferencia entre la interpretación de un observador que se mueve con el punto Q,pero sin girar, y el caso del observador que está sobre el cuerpo en movimiento.
Para un observador colocado sobre el cuerpo 2, los dos puntos P y Q pareceríanestacionarios, es decir, ninguno aparentaría tener un desplazamiento ya que no semueven en relación con el observador, y la diferencia de desplazamiento vista porun observador que guarda esta posici6n sería cero.2-13 ROTACIÓN Y TRANSLACIÓNAplicando el concepto de diferencia de desplazamiento entre dos puntos del mismo cuerpo rigido, ahora se puede definir la translaci6n y la rotación.La translaci6n se define como un estado de movimiento de un cuerpo para elque la diferencia de desplazamiento entre dos puntos cualesquiera , P y Q del mismo,es cero o bien, basándose en la ecuación de la diferencia de desplazamiento (2-
66) ,.:iRpQ = .:iRp - .:iRQ O.:iRp = .:iRQ(2-68)lo cual afirma que los desplazamientos de dos puntos cualesquiera del cuerpo son iguales. La rotaci6n es un e stado de movimiento del cuerpo para el que puntosdiferentes del mismo presentan desplazamientos diferentes.En la figura 2-23a se ilustra una s ituación en la que el cuerpo se ha movido alo largo de una trayectoria curva, de la posición X2Y2 a la xíyí. A pesar del hechode que las trayectorias de los puntos son curvas, t .:iRp sigue siendo igual a liRQy el cuerpo ha sufrido una translación . Se observa que en la translación las trayec
-(a) (b)Figura 2-23 a) Translación /lRp = /lRQo /l02 O; b) rotación : /lRp # 1l.RQo 1::. 02# O.t La translación en la que las trayectorias de los puntos no son rectas se denomina en ocasionestranslación curvilinea.. ...
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 82/508
POSICIÓN Y DESPLAZAMIENTO 69torias de los puntos, descritas por dos puntos cualesquiera del cuerpo, son idénticasy no existe cambio alguno en la orientación angular entre ei sistema decoordenadas en movimiento y el sistema de coordenadas del observador, dichode otra manera !:J.82 = 82 - 82 = O.
En l a figura 2-23b, el punto central del cuerpo en movimiento está restringidoa moverse siguiendo una trayectoria rectilinea. Con todo , conforme lo hace, elcuerpo gira de tal manera que !:J.02 = 82 - 82 :;i= O Y los desplazamientos 4Rpy 4.RQno son iguales. Incluso aunque no exista un punto obvio del cuerpo en torno alcual haya girado, el sistema de coordenadas X iY2 ha cambiado su orientación angularrelativa a X¡ Y I > Y se dice que el cuerpo efectuó una rotación. Nótese que lastrayectorias de los puntos descritas por P y Q no son iguales.En estos dos ejemplos se ve que la rotación o la translación de un cuerpo nose pueden definir basándose en el movimiento de un solo punto; y que se trata demovimientos característicos de un cuerpo o de un sistema de coordenadas. No se
puede hablar de "rotación de un punto" porque no tiene significado hablar de laorientación angular de un punto. También es incorrecto asociar los términosrotación y translación con las características rectilineas y curvilíneas de la trayectoriade Wl solo punto. Aunque no importa qué puntos del cuerpo se elijan, espreciso comparar el movimiento de dos o más puntos para contar con definicionessignificativas de estos términos.2-14 DESPLAZAMIENTO APARENTEYa se hizo notar que el desplazamiento de un punto en movimiento no depende dela trayectoria particular recorrida; sin embargo, puesto que el desplazamiento secalcula a partir de los vectores de posición de los puntos extremos de la trayectoria,
es esencial conocer el sistema de coordenadas del observador .Considérese una partícula P3 que se mueve a lo largo de una trayectoriaconocida en un sistema de coordenadas X2Y2Z2, que, a su vez, se mueve con respectoal sistema de referencia absoluto X¡YIZ¡, como se ilustra en la figura 2-24.Defmamos también otro punto P2 que esté rígidamente fijo al cuerpo en movimiento2 , es decir, que sea estacionario con respecto al sistema de coordenadasX2Y2ZZ, Y que inicialmente coincida con el punto P3 Tal y como la ve un observador absoluto ..en el sistema de coordenadas X1 YIZI), después de un intervalo de tiempo determinado, la partícula P3, parece habersemovido a una nueva ubicación p!, con el desplazamiento 4.Rp3 El punto P1 , al
formar parte del cuerpo 2, se mueve de un modo diferente a P3 , llega a una nuevaubicación Pi con el desplazamiento 4.Rp2 No obstante, la situación parece muy diferente si la observa una personacolocada en el sistema de coordenadas móviles X2Y2Z2 ' Este observador sólo ve el

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 83/508
70 TEoRÍA DE MÁQUINAS Y MECANISMOSFigura 2-24 Desplazamiento aparente de un punto.-----Xldesplazamiento aparente ARt'J/2 de la partícula P3, conforme recorre la trayectoriaen su sistema de coordenadas. Puesto que la trayectoria está fija en un sistema
de coordenadas, no detecta su movimiento y, por ende , no observa el mismodesplazamiento de P3 que percibe el observador absoluto. El punto P2 se antojaestacionario a los ojos de este observador y, por lo tanto, ARpl/2 O.Según el triángulo vectorial ilustrado en la figura 2-24, es evidente que las percepcionesde los dos observadores están relacionadas por la ecuación de desplazamientoaparente(2-69)Se puede tomar esta ecuación como la definición del veétor de desplazamientoaparente, aunque también es primordial entender los conceptos físicos que intervienen. Nótese que el vector de desplazamiento aparente relaciona los desplazamientos
absolutos de dos puntos coincidentes que son partículas de diferentescuerpos en movimiento. Nótese también que no existe restricción alguna para laubicación real del observador que se mueve junto con el sistema de coordenadas 2,sólo que debe estar fijo en ese sistema, de manera que no perciba el desplazamientodel punto P2 Uno de los usos principales del desplazamiento aparente es determinar un desplazamientoabsoluto. No es raro encontrar en las máquinas un punto semejante alP3 que esté restringido a moverse siguiendo una ranura, trayectoria o curso definidopor la forma de otro eslabón móvil 2 . En tales casos quizá resulte muchomás conveniente medir o calcular ARp¡ y ARp¡/2 en combinación con la (2-69),
que medir directamente el desplazamiento absoluto ARpJ'

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 84/508
POSICIÓN Y DESPLAZAMIENTO 712-15 DESPLAZAMIENTO ABSOLUTOAl reflexionar sobre la definición y el concepto del vector de desplazamientoaparente, se llega a la conclusión de que el desplazamiento absoluto de un puntomóvil, ARP,lI ' es el caso especial de un desplazamiento aparente en el que el observador
está fijo en el sistema de coordenadas absolutas . Como se explicó en elcaso del vector de posición , a menudo se abrevia la notación usando :ARp3; o simplementeARp, y cuando no se indica en forma explícita, se presupone un observadorabsoluto .Es probable que se pueda lograr una mejor comprensión flsica del desplazamientoaparente relacionándolo con el desplazamiento absoluto . Imaginese unautomóvil P3 que recorre una carretera y está siendo seguido por un observadorabsoluto a cierta distancia hacia un lado. Considérese cómo este observador percibevisualmente el movimiento del automóvil. Aunque puede no estar conscientede todos los pasos que se citan a continuación , el argumento aquí es que el observador
imagina primero un punto P I " que coincide con P3, el cual define en sumente como estacionario; quizá se relacione con un punto fijo de la carretera o un árbol cercano, por ejemplo. Luego compara sus observaciones posteriores delautomóvil P3 con las de PI ' para detectar el desplazamiento. Nótese que nohace la comparación con sq propia ubicación. sino con el punto inicialPI . En este caso, la ecuación de desplazamiento aparente se convierte en unaidentidad:PROBLEMASt2-1 Describase y trácese el lugar geométrico de un punto A que se mueve obedeciendolas ecuacionesR;' = at cos 27Tt, R .. at sen 2-rrt, W, = O.2-2 Encuéntrese la diferencia de posición del punto P al punte Q de la curva y X2 +
X - 16. en dondeR1> =" 2 y 4.2-3 La trayectoria de un punto en movimiento se define mediante la ecuación y 2X228. Encuéntresela diferencia de posición del punto P al punto Q si Rf, = 4 y Ro = -3.2-4 La trayectoria de un punto en movimiento P se define mediante la ecuación y 60xl/3. ¿Cuál esel desplazamiento del punto si su movimiento principia cuando Rf, = O y concluyecuando Rf, = 3?2-5 Si el punto A se mueve sobre el lugar geométrico del problema 2-1, hállese el desplazamiento desdet = 2 hasta t 2.5.
2-6 La posición de un punto está dada por la ecuación R = IOOei1"'. ¿Cuál es la trayectoria de dichopunto? Determínese el desplazamiento del punto, de t = 0.10 a t = 0040.2-7 La ecuación R = (tl+4)e -í..tI IO define la posición de un punto. ¿En qué dirección esirando elvector de posición? ¿En dónde se localiza el punto cuando t = 0.10 a t O? ¿Cuál puede serel siguien-+ Al asignar los problemas, es posible que el profesor desee especificar el métodode resolución quedeba aplicarse, en vista de la diversidad de planteamientos que se han presentado en el texto.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 85/508
72 TEORÍA DE MÁQUINAS y MECANISMOSte valor de t si la dirección del vector de posición debe ser la misma que cuando tO? ¿Cuál es el desplazamientode la primera a la segunda posición del punto?2-8 La ubicación de un punto se define con la ecuación R = (4t + 2)ei..t21J{) en donde t es el tiempo en
segundos. El movimiento del punto se inicia en t = O. ¿Cuál es el desplazamiento durante los tresprimeros segundos? Encuéntrese el cambio en la orientación angular del vector de posición durante elmismo intervalo de tiempo.2((f>,.--'--... -..-x 1Problema 2-92-9 El eslabón 2 de la figura gira obedeciendo a la ecuación 8 = '11't14. El bloque3 se desliza hacia afuerasobre el eslabón 2 siguiendo la ecuación r = (2 + 2. ¿Cuál es el desplazamiento absolutoARp, desde
t 1 hasta t = 21 ¿Cuál es el desplazamiento aparente .:1Rp1l2?2-10 Una rueda cuyo centro se encuentra en O se mueve rodando sin deslizamiento,de tal modo quesu centro se desplaza 1 0 pulg hacia la derecha. ¿Cuál es el desplazamiento del punto P sobre la periferiadurante este intervalo?,yfEZ"' I.... .. - .."... .10Ilp;:r/////./////ffi/////7//ffi//é/7/ X
IYí r ..Ji:Ah'-----' '-- "I:¡B\ .. 1 ,' A.'-+... '....Problema 2-10 Rueda en movimiento y Problema 2-11 RA Oz = Reo. = 3 pulg . ReA R040z 6 pulg.2-11 Un punto Q se mueve desde A hasta B a lo largo del eslabón 3 mientras que eleslabón 2 gira desde(h = 30° a O; = 1 20°. Encuéntrese el desplazamiento absoluto de Q.Problema 2-12 RAe = 200 mm, '" = 15°; Problema 2-13 RAO 1 pulg, RBA = 2.5 pulg, ReB = 7 pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 86/508
POSICIÓN Y DESPLAZAMIENTO 732-12 El eslabonamiento ilustrado se impulsa moviendo el bloque corredizo 2. Escríbase la ecuación decierre del circuito y resuélvase analiticamente el caso para la posición del bloquecorredizo 4. Verifiquesegráficamente el resultado para la posición en la que 4> = -45°.
2-13 El mecanismo excéntrico de corredera-manivela se impulsa por la manivela giratoria 2. Escríbasela ecuación de cierre del circuito. Encuéntrese la posición de la corredera 4 en funciónde 82,2-14 Escríbase un programa de calculadora para encontrar la suma de cualquier númerode vectoresbidimensionales expresados en formas rectangulares o polares combinadas. Es necesario que el resultadose pueda obtener en cualquiera de las dos formas, haciendo que la magnitud y el ángulo de la formapolar tenga sólo valores positivos.2-15 Escríbase un programa de computadora para trazar la gráfica de la curva del aco
plador de cualquierforma de manivela-oscilador o doble manivela del eslabonamiento de cuatto barras. El programadebe aceptar cuatro longitudes de los eslabones y coordenadas rectangulares o polares del punto delacoplador en relación con éste.(a)(e)Problema 2-16 (a) RcARpB = 65 mm; (e) RBARpB 4 pulg.B(d)
2 pulg, RSA = 3.5 pulg, Rpe = 4 pulg. (b) RcA = 40 mm, RSA 20 mm, Res RpB = 25 mm; (d) RDA = l pulg, RBA = 2 pulg, ReB Roc 3 pulg ,2-16 Para cada eslabonamiento ilustrado en la figura, hállese la trayectoria del punto P: a) mecanismoinvertido de corredera-manivela; b) segunda inversión del mecanismo de corredera-manivela; e) mecanismode línea recta; d) mecanismo de eslabón de arrastre.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 87/508
CAPíTULOTRESVELOCIDAD3-1 DEFI NICION DE VELOCIDADEn la figura 3-1 un punto en movimiento se observa primero en la ubicación P,definida por el vector de posición absoluta Rp. Después de un breve intervalo de
tiempo, At, se observa que su posición ha cambiado a P', definida por Rp,. Serecordará que, según la ecuación (2-65), el desplazamiento durante este intervalode tiempo se define comodRp Rp-RpLa velocidad promedio del punto durante el intervalo !:J.l es 4.Rp/!:J.t. Su velocidadinstantánea (que de aquí en adelante se llamará simplemente velocidad) sedefine por el límite de esta razón para un intervalo de tiempo infinitesimalmentepequefio y está dada porlim 4.Rp = dRpM-.Q!:J.t dt (3-1)Puesto que dRp es un vector, hay dos convergencias al tomar este limite, la magn
itudy la dirección. Por lo tanto, la velocidad de un punto es una cantidad vectorialigual a la rapidez de cambio de su posición respecto al tiempo. Al igual quelos vectores de posición y desplazamiento, el vector velocidad se define para unpunto específico; "velocidad" no se debe aplicar a una recta, sistema de coordenadas,volumen u, otra colección de puntos, puesto que la velocidad en cadapunto puede diferir.Se recordará que las definiciones de los vectores de posición Rp y RÍo> dependende la ubicación y orientación del sistema de coordenadas del observador. Por

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 88/508
VELOCIDAD 75..----.-----------Xl2'1 Figura 3-1 DesplazallÚento de una partícula móvil.otro lado, el vector desplazamiento .1Rp y el velocidad V p son independientes dela ubicación inicial del sistema de coordenadas o de la posición del observador"
dentro de éste. No obstante, la velocidad V p depende críticamente del movimientodel observador o del sistema de coordenadas, en caso de haberlo; por esto sesupone que el observador es estacionario dentro del sistema de coordenadas. Si elsistema de coordenadas que interviene es el absoluto, la velocidad se consideravelocidad absoluta y se denota con el símbolo V PI] o, sencillamente, V p. Esto concuerdacon la notación que se utiliza para el desplazamiento absoluto.3-2 ROTACI ÓN DE U N CUERPO RÍGIDOCuando un cuerpo rígido se traslada, como se vio en la sección 2-13, el movimientode cualquier partícula individual es igual al movimiento de todas las demás delmismo cuerpo. Sin embargo , cuando el cuerpo gira, dos partículas arbitrariamente
escogidas P y Q no describen el mismo movimiento y un sistema de coordenadasfijo al cuerpo no se mantiene paralelo a su orientación inicial; dicho de otramanera, el cuerpo sufre cierto desplazamiento angular AlJ.Los desplazamientos angulares no se estudiaron detalladamente en el capítulo2 porque, en general, no se pueden tratar corno vectores. La razón es que noobedecen las reglas usuales de la adición vectorial; si se describen varios desplazamientosangulares brutos en sucesión, en tres dimensiones, el resultado dependedel orden en que se producen.Para ilustrar esto, considérese el rectángulo ABCO de la figura 3-20. El cuerporectangular se gira primero -900 en torno al eje y y luego se gira + 90° alrededor del eje x. Se ve que la posición final del cuerpo está en el plano yz. En la
figura 3-2b el cuerpo ocupa la misma posición inicial y se gira nuevamente alrededorde los mismos ejes, describiendo los mismos ángulos y en las mismas direcciones;no obstante, la primera rotación la desarrolla en torno al eje x y la segundaalrededor del eje y. El orden de las rotaciones se invierte y la posición final del rectánguloahora se ve que es en el plano xz y no en el plano yz, corno lo fue antes.Puesto que esta característica no corresponde a la ley conmutativa de la adición
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 89/508
76 TEORIA DE MÁQUINAS Y MECANISMOSB" (a)z zy(b)Figura 3-2 Los desplazamientos angulares no se pueden sumar vectorialmente porqu
e el resultadodepende del orden en que se sumen.vectorial, los desplazamientos angulares tridimensionales no se pueden manejarcomo vectores.Por otra parte, los desplazamientos angulares que ocurren alrededor del mismoeje o de ejes paralelos, sí obedecen la ley conmutativa. Asimismo, los desplazamientosangulares infinitesimalmente pequeños son conmutativos. Para evitarconfusiones, se tratarán todos los desplazamientos angulares finitos como cantidadesescalares; no obstante, se tendrá la ocasión de tratar los desplazamientosangulares infinitesimales como vectores.
-Y2z,Hgura 3-3 Diferencia de desplazamiento entre dos puntos del mismo eslabón rígido.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 90/508
VELOCIDAD 77Figura 3-4 Diferencia de desplazamiento .1RPQ según la ve un observador en traslación.En la figura 3-3 se recuerda la definición de la diferencia de desplazamientoentre dos puntos, P y Q, fijos en el mismo cuerpo rígido . Como se señaló enla sección 2-12, el vector diferencia desplazamiento es atribuible por completo a
larotación del cuerpo; en un cuerpo que describe una traslación no hay diferencia dedesplazamiento entre sus puntos. Se llegó a esta conclusión representando el desplazamientocomo un suceso que ocurre en dos pasos. En primer lugar, se supusoque el cuerpo realiza una traslación a lo largo del desplazamiento ARo hasta laposición x;y;zi'. Luego, se hizo que el cuerpo girara alrededor del punto Q* hasta la posición xíyízi.Otra manera de representar la diferencia de desplazamiento ARpo es concebirun sistema de coordenadas móviles cuyo origen se desplaza junto con el puntoQ; pero cuyos ejes se mantienen paralelos a los ejes absolutos x,y,z¡. Nótese
que este sistema de coordenadas no sufre rotación. Un observador que se encuentreen este sistema de coordenadas no observa movimiento alguno en el punto Q,porque permanece en el origen de su sistema. Para el desplazamiento del punto Pobservará el vector diferencia de desplazamiento ARPQ. A este observador leparece que el punto Q se mantiene fijo y que el cuerpo gira en torno a este puntofijo, como se ilustra en la figura 3-4.No importa si el observador está ubicado en el sistema de coordenadas básicoo en el móvil descrito, el cuerpo parece girar describiendo cierto ángulo total 110en su desplazamiento de X2Y2Z2 a xíYízí. Si se considera el punto de vista del observadorfijo , la ubicación del eje de rotacién no es obvia. Tal y como lo ve el observadoren traslación. el eje pasa por el punto Q aparentemente estacionario; todos

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 91/508
78 TEORÍA DE MÁQUINAS Y MECANISMOSlos puntos del cuerpo parecen describir trayectorias circulares en torno a esteeje, ycualquier recta que se encuentre en el cuerpo, cuya dirección sea normal a este eje,parece sufrir un desplazamiento angular idéntico A8.
La velocidad angular de un cuerpo en rotación se define ahora como la cantidadvectorial (1) cuya dirección es la misma que la del eje instantáneo de rotación.La magnitud del vector velocidad angular se define como la rapidez de cambio respectoal tiempo de la orientación angular de cualquier recta en el cuerpo cuyadirección sea normal al eje de rotación. Si el desplazamiento angular de cualquierade estas rectas se designa como A8 y el intervalo de tiempo como At, la magnitud del vector velocidad angular (1) esw= lun, -AO =dOD-I...o At dt(3-2)
Puesto que se ha acordado que las rotaciones en sentido contrario al movimientode las manecillas del reloj son positivas, el sentido del vector (1) a lo largodel ejede rotación se define de acuerdo con la regla de la mano derecha.3-3 DIFERENCIA DE VELOCIDADES ENTREPUNTOS DEL MISMO CUERPO RÍGIDOEn la figura 3-5a se ilustra otra vista del desplazamiento del mismo cuerpo rígido que se representó en la figura 3-3 . Ésta es la que vería un observador ubicado en elsistema de coordenadas absolutas y que mira directamente a lo largo del eje derotación del cuerpo en movimiento, desde la punta del vector (1). En esta vista, eldesplazamiento angular AO se observa en su tamaño real, y todas las rectas del
cuerpo describen este mismo ángulo durante el desplazamiento. Los vectores dedesplazamiento y los de diferencia de posición no aparecen necesariamente en su tamañoreal, sino que más bien se perciben escorzados bajo este ángulo de visión.En la figura 3-5b se presenta la rotación del mismo cuerpo rígido, con el mismoángulo de observación pero, en este caso, desde el punto de vista del observadoren traslación. Por tanto, esta figura corresponde a la base del cono ilustradoen la figura 3-4. Se observa que los dos vectores identificados por rpQ y rpQ sonlas vistas escorzadas de RpQ y RpQ y, según la figura 3-4, es evidente que sus magnitudesson
(a)efl donde q:, es el ángulo constante desde el vector velocidad angular ro hasta el vector diferencia de posición giratorio RpQ conforme describe el cono.Si se observa nuevamente la figura 3-5b, se ve que también se puede interpretarcomo un dibujo a escala correspondiente a la ecuación (2-67). Ilustra elhecho de que el vector diferencia de desplazamiento ..RpQ es igual al cambio vec-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 92/508
VELOCIDAD 79(b)(a)Figura 3-5 a) Vista verdadera de los desplazamientos angulares de la figura 3-3.b) Sustracción vectorialpara obtener la diferencia de desplazamiento A.RPQ.
torial en la diferencia de posición absoluta RpQ producida durante el desplazamientoARPQ RpQ RpQ (b)Ahora ya es posible calcular la magnitud del vector diferencia de desplazamiento ARPQ- En la figura 3-5b, en donde aparece en su tamaño verdadero, setraza su mediatriz, lo que muestra quey, según la (a)I1Rpo = 2(RpQ 118 sen cf» sen T(e)(d)Si se impone ahora la limitación de movimientos pequeños, el seno del término
de desplazamiento angular puede aproximarse mediante el ángulo mismo,I1Rpo = 2(Rpo 110 sen cf» T = 110 RpQ sen cf> (e)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 93/508
80 TEORÍA DE MÁQUINAS Y MECANISMOSSi se divide entre el pequefio incremento de tiempo at, observando que la magnitud Rpo Y el ángulo cb son constantes durante el intervalo, y tomando el limite, seobtiene!.. afF = l.. (!.)RPQ sen <f> = wRpo sen <f> (f)Si se recuerda que la definición de <f> 10 establece como el ángulo comprendido entr
elos vectores ro y RpQ, se pueden restablecer los atributos vectoriales de laecuación anterior, reconociéndola como la forma de un producto vectorial. Porendel' J1.Rpo d RpQÁ.... R at = dt= ro x po (g)Esta forma es tan importante y tan útil que tiene su propio nombre y símbolo; se leconoce como vector diferencia de velocidad y se denota por V PQV _ dRPQPQ - dt
Ahora recordemos la ecuación de la diferencia de desplazamiento (2-66),Si esta ecuación se divide entre M y se toma el limite, se obtienelím J1.Rp == lím J1.RQ + lim J1.RPQ Át->O at AI->O at ÁI->O at(3-3)(h)(Oque, por las ecuaciones (3-1) y (3-3), se convierte enVp=VQ + VpQ (3-4)Esta ecuación extremadamente importante recibe el nombre de ecuación de ladiferencia de velocidad; junto con la (3-3) constituye una de las bases primarias detodas las técnicas de análisis de la velocidad. La ecuación (3-4) se puede escribirpara dos puntos cualesquiera sin restricción alguna; no obstante, como se verá
repasando la deducción anterior, la (3-3) no se debe aplicar a cualquier par arbitrariode puntos. Esta forma es válida sólo si los dos p untos están fijos al mismocuerpo rigido. Tal vez pueda recordarse mejor esta restricción si todos los subíndicesse escriben en forma explícita(j)pero, por brevedad, se acostumbra suprimir casi siempre los subíndices del númerode eslabón. Nótese que estos son los mismos en toda la ecuación (¡). Si se realizaun intento erróneo de aplicación de la (3-3), cuando los puntos P y Q no formanparte del mismo eslabón, dicho error quedará al descubierto ya que no se verá conclaridad qué factor ro se debe usar.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 94/508
3-4 ANÁLISIS GRÁFICO DE LA VELOCIDAD ;POLÍGONOS D E VELOCIDADE"iVELOCIDAD 81Uno de los principales métodos de análisis de velocidad es el gráfico. Como se vioen el análisis gráfico de la posición, se emplea primordialmente en problemasbidimensionales cuando se tiene sólo una posición que requiere solución. Sus principal
esventajas son que se obtiene con gran rapidez una solución y que se acrecentanla concepción y la comprensión del problema al aplicar el método gráfico.Como ejemplo inicial del análisis gráfico de la velocidad, consideremos elmovimiento bidimensional del eslabón no restringido ilustrado en la figura 3-6a.Supóngase que se conocen las velocidades de los puntos A y B, Y se desea determinarla velocidad del punto e y ia velocidad angular del eslabón. Se supone queya se trazó un diagrama a escala del eslabón, figura 3-6a, en el instante considerado,es decir, que ya se completó un análisis de posición y que se pueden medirlos vectores diferencia de posición basándose en este diagrama.
A continuación se considera la ecuación de la diferencia de velocidad (3-4)relacionando los puntos A y B,'V.\.' B \VIV A +V00 BA (a)en donde las dos incógnitas son la magnitud y la dirección del vector diferencia develocidad V BA, como se indica arriba de este símbolo en la ecuación. En la figura3-6b se muestra la solución gráfica de la ecuación. Después de elegir una escalapara representar los vectores velocidad, se trazan a escala los vectores V A Y VBpartiendo de un origen común y en las direcciones especificadas. El vector que seextiende entre los puntos de V A Y V H es el vector diferencia de velocidad V BA: Y escorrecto, dentro de los límites de exactitud de la gráfica, tanto por lo que respecta
a su magnitud como a su dirección.Ahora se puede hallar la velocidad angular (d del eslabón aplicando laecuación (3-3)V BA ú) X RHA (b)Puesto que el eslabón tiene movimiento plano, el vector ú) es perpendicular alplano de movimiento, es decir, perpendicular a los vectores V BA Y RBA Por ende,al considerar las magnitudes de la ecuación anterioro bien,VBA WRBAW = VBAIRBA (e)Por lo tanto, la magnitud numérica de w se encuentra midiendo a escala VBA en lafigura 3-6b, y RBA en la figura 3-6a, teniendo cuidado de aplicar adecuadamente
los factores de escala para las unidades; una de las prácticas más comunes esevaluar w en radianes por segundo.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 95/508
82 TEORÍA DE MÁQUINAS Y MECANISMOSA D(a)(b) VABB ovDA
(d)A(e)VB(el A ...... ---......!f)Figura 3-6La magnitud w no es una solución completa del vector velocidad angular; ytambién se debe determinar la dirección. Como se hizo notar antes, el vector w esperpendicular al plano del propio eslabón porque el movimiento es plano. Sin embargo,esto nada dice acerca de si w sale del plano de la figura o entra al mismo.
Esto se determina como se ilustra en la figura 3-6<:. Si se toma el punto de vista deun observador en traslación, es decir, moviéndose con el punto A pero sin girar, sepuede representar al eslabón como si girara en torno al punto A. La diferencia de
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 96/508
VELOCIDAD 83velocidad V HA es la única velocidad detectada por este observador; de donde, al interpretarV HA como indicadora de la dirección de rotación del punto B en tprno alA, se encuentra la dirección de ro que, en este ejemplo, es opuesto al del movimiento
de las manecillas del reloj. Aunque no con una notación estrictamente vectorial,una buena práctica, que se seguirá en este libro, en problemas bidimensionaleses indicar la solución final en la forma ro = 1 5 rad/s cmr (en sentidocontrario al movimiento de las manecillas del reloj), con lo que se indica tanto la magnitud como la dirección.La costumbre de trazar los diagramas vectoriales con líneas gruesas, como enla figura 3-6b, facilita su lectura; pero cuando el diagrama es la solución gráficadeuna ecuación, no es muy exacto. Por esta razón se acostumbra construir la solucióngráfica con lineas delgadas bien definidas, usando un lápiz de dibujo depunta dura, como se muestra en la figura 3-6d. La solución se inicia eligiendo una
escallt'y un punto, que se identifica como Ov, para representar la velocidad cero.Las velocidades absolutas, tales como V A Y V H , se trazan con sus origenes en. Ov ,y sus extremos se identifican como los puntos A y B. Entonces la recta que va deAa B representa la diferencia de velocidad V BA' Al continuar con este desarrollo,se verá que estas identificaciones en los vértices son suficientes para determinarla notación precisa de todas las diferencias de velocidades representadas por lasrectas del diagrama. Por ejemplo, nótese que V BA se representa con el vector queva del punto B al punto A. Con esta convención de identificación, no es necesario
usar puntas de flecha o notaciones adicionales que nada hacen más que complicarel diagrama. Un diagrama de esta indole se denomina polígono de velocidades y,como se verá más tarde, contribuye enormemente a facilitar la aplicación de lastécnicas gráficas de solución.Sin embargo, uno de los peligros de esta convención es que el analista comenzaráa pensar que la técnica es una serie de "trucos" gráficos y correrá el riesgode olvidarse de que cada recta trazada puede y debe estar por completo justificadamediante una ecuación vectorial correspondiente. Las gráficas sólo constituyenuna técnica conveniente de resolución y no un sustituto de una base teórica bienfundada.Volviendo a la figura 3-6c, pudo pensarse que el hecho de que el vector V BA
fuera perpendicular a RBA es simple coincidencia. No obstante, si se reexamina laecuación (b), se observará que era un resultado obligatorio, que proviene delproducto vectorial con el vector ro. En el paso siguiente se aprovechará estapropiedad.Ahora que se ha encontrado ro, determinamos la velocidad absoluta del puntoC. Esta se puede relacionar mediante las ecuaciones de la diferenCIa de velocidadcon las velocidades absolutas de los puntos A y B00 vv ov' '>Iv fJ.y V C = V A + V CA = V B + V CB (d)Puesto que los puntos A, B Y e forman parte del mismo eslabón rígido, cada unode los vectores de diferencia de velocidad V CA Y V CB, es de la forma ro x R, utilizando
RCA Y RCB, respectivamente. Como resultado de ello, V CA es perpen-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 97/508
84 TEORlA DE MÁQUINAS Y MECANISMOSdicular a ReA' y V CB es perpendicular a RcB Las direcciones de estos dos términosse indican, por ende, como elementos conocidos en la ecuación (d).Puesto que ya se determinó w, es fácil calcular las magnitudes de V CA Y V CB ,aplicando una fórmula del tipo de la (e) ; no obstante, se supondrá que esto no sehace. Por el contrario, se construye la solución gráfica para la (d). Esta ecuación
afirma que un vector que es perpendicular a RCA se debe sumar a V A Y que elresultado será igual a la suma de V B Y un vector perpendicular a ReB. La soluciónse ilustra en la figura 3-6e. En la práctica, la solución se continúa sobre elmismo diagrama como en la figura 3-6d, y conduce a la figura 3-6g. Se trazauna recta perpendicular a RCA (que representa a V CA) , partiendo del punto A(representando la adición a V A ); del mismo modo se traza una recta perpendicular a RcB , partiendo del punto B. El punto de intersección de estas dos rectas seidentifica con el símbolo e y representa la solución de la ecuación (d). La recta queva de Ov al punto e representa ahora la velocidad absoluta V c. Esta velocidad sepuede transferir nuevamente al eslabón e interpretarse como V c, tanto en magnitud
como en dirección, como se indica en la figura 3-61.Si se observa el sombreado y los ángulos marcados con a y f3 en la figura 3-6gy a, se ve uno conducido a investigar si los dos triángulos identificados por ABeen cada una de estas figuras son semejantes, como parecen ser. Al revisar los pasosde construcción se ve que, en efecto, lo son porque los vectores de diferenciade velocidad V BA, V CA Y V CB' son perpendiculares a los vectores de diferenciadeposición respectivos, RBA, RCA, Y RcB. Esta propiedad sería verdadera independientementede la forma del eslabón en movimiento; una figura de forma semejanteaparecería en el polígono de velocidades. Sus lados se trazan siempre a escala,
mayor o menor en un factor, iguales a la velocidad angular del eslabón, y siempreestá girado 900 en la dirección de la velocidad angular. Las propiedades resultandel hecho de que cada vector de diferencia de velocidad entre dos puntos deleslabón tiene la forma de un producto vectorial del mismo vector w con el vectorde diferencia de posición correspondiente. Esta figura de forma semejante en elpolígono de ..elocidades se designa comúnmente como imagen de velocidades deleslabón, y cualquier eslabón en movimiento poseerá una imagen de velocidadescorrespondiente en el polígono de velocidades.Si se hubiera conocido inicialmente el concepto de imagen de velocidades, sehubiera podido acelerar considerablemente el proceso de resolución. Una vez queha progresado hasta la solución el estado ilustrado en la figura 3-6d, se conocenlos
puntos de la imagen de velocidades A y B. Se pueden utilizar estos dos puntoscomo base de un triángulo semejante a la forma del eslabón e identificar directamenteel punto imagen e, sin necesidad de escribir la ecuación (d). Es precisotener cuidado para no permitir que el triángulo se invierta entre el diagrama deposiciones y la imagen de velocidades; pero la solución puede desarrollarse conrapidez, exactitud y en forma natural, conduciendo a la figura 3-6g. Aqui se debetener nuevamente la precaución de qUe'10dos los pasos de la solución se basen enecuaciones vectoriales estrictamente deducidas y no en trucos geométricos. Es convenienteseguir escribiendo las ecuaciones vectoriales correspondientes hasta estarpor completo familiarizado con el procedimiento.
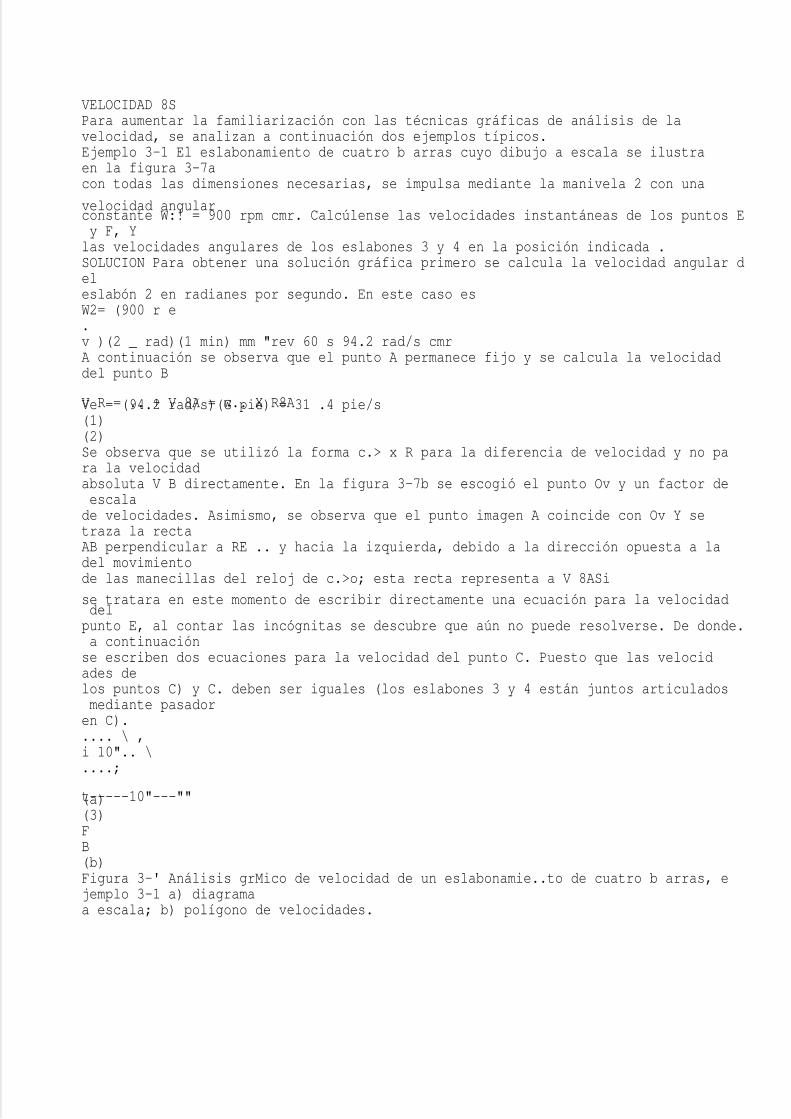
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 98/508
VELOCIDAD 8SPara aumentar la familiarización con las técnicas gráficas de análisis de lavelocidad, se analizan a continuación dos ejemplos típicos.Ejemplo 3-1 El eslabonamiento de cuatro b arras cuyo dibujo a escala se ilustraen la figura 3-7acon todas las dimensiones necesarias, se impulsa mediante la manivela 2 con una
velocidad angularconstante W:! = 900 rpm cmr. Calcúlense las velocidades instantáneas de los puntos Ey F, Ylas velocidades angulares de los eslabones 3 y 4 en la posición indicada .SOLUCION Para obtener una solución gráfica primero se calcula la velocidad angular deleslabón 2 en radianes por segundo. En este caso esW2= (900 r e.v )(2 _ rad)(1 min) mm "rev 60 s 94.2 rad/s cmrA continuación se observa que el punto A permanece fijo y se calcula la velocidaddel punto B
V R = .. + V 8A = w.. X R8AVe = (94.2 rad/s)(G pie) = 31 .4 pie/s(1)(2)Se observa que se utilizó la forma c.> x R para la diferencia de velocidad y no para la velocidadabsoluta V B directamente. En la figura 3-7b se escogió el punto Ov y un factor deescalade velocidades. Asimismo, se observa que el punto imagen A coincide con Ov Y setraza la rectaAB perpendicular a RE .. y hacia la izquierda, debido a la dirección opuesta a ladel movimientode las manecillas del reloj de c.>o; esta recta representa a V 8ASi
se tratara en este momento de escribir directamente una ecuación para la velocidaddelpunto E, al contar las incógnitas se descubre que aún no puede resolverse. De donde.a continuaciónse escriben dos ecuaciones para la velocidad del punto C. Puesto que las velocidades delos puntos C) y C. deben ser iguales (los eslabones 3 y 4 están juntos articuladosmediante pasadoren C)..... \ ,i 10".. \....;
t-----10"---""(a)(3)FB(b)Figura 3-' Análisis grMico de velocidad de un eslabonamie..to de cuatro b arras, ejemplo 3-1 a) diagramaa escala; b) polígono de velocidades.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 99/508
86 TEORíA DE MÁQUINAS Y MECANISMOSAhora se trazan dos rectas en el poligono de velocidades; la recta BC se dibujaa partir de B yperpendicular a RcH, Y la recta DC se traza desde D (coincidente con Oven vistade que VD O)perpendicular a RCD- Luego se marca e l punto de intersección identificándolo con la
letra C.Cuando se miden a escala las longitudes de estas rectas, se encuentra que VCB =38.4 pie/s yVc VCD = 45.6pie/s. Ahora pueden hallarse las velocidades angulares de los eslabones 3 y4 como sigue:38.4 pie/s 25.6 rad/s crnr Resp. (4) w, 18/12 pieVCD 45.5 pie /sW4=- 49.6 rad/s cmr Resp, (5)RCD 11/12 pieen donde se hallaron las direcciones de w) y w. aplicando la técnica ilustrada enla figura 3-&.
Ahora se tienen varios métodos para hallar VE. En uno de ellos se mide REB a partir deldibujo a escala que aparece en la figura 3-7a y, a continuación, puesto que los puntos B y E formanparte del eslabón 3, se puede calcular t.VEB = wJREB (25.6 rad/s)e.28 Pie ) = 23.0 pie/s (6)Ahora es factible trazar ya la recta BE en el polígono de velocidades, dibujándola ala escalaapropiada. y perpendicular a REB, resolviendo asi t l!l ecuación de diferencia develocidadesEl resultado es"" \,,\, \"VE=V8+VEB
VE 27.6 pie/s Resp,tal y como se miden a escala en el poligono de velocidades."Por otro lado se puede hallar VE partiendo de,,\<\ '\ \, " ...VE=VC+VEC(7)(8)mediante un procedimiento idéntico al que se empleó con la ecuación (7). Esta solución produciríael triángulo OvEC en el polígono de velocidades.Supóngase que se desea calcular V E sin el paso intermedio que representa calcularw. En este
caso se escriben simultáneamente las ecuaciones (7) y ( 8 ),(9)Se trazan las rectas EB (perpendicular a REB) Y EC (perpendicular a REc) en el polígono de velocidades,se encuentra su intersección y así se resuelve la ecuación (9).Sin embargo, es probable que el método más sencillo de resolver para V E, es sacar ventajadel concepto de la imagen de velocidades del eslabón 3. Reconociendo que ya se encontraron lospuntos B y C de la imagen de velocidades, se puede construir el triángulo BEC en el poligono develocidades, semejante al triángulo BEC en el diagrama a escala del eslabón 3. Estoubica al punto
E en el poligono de velocidades, dando con ello una solución para VE.t No hay restricción alguna en esta deducción que requiera que REB se encuentre a lolargo de la

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 100/508
parte material del eslabón 3, para poder aplicar la ecuación (6).+ Nótese que los valores numéricos no se deben sustituir de manera directa en la ecuación (7); estaecuación requiere una adición vectorial, no escalar, y este es justamente el propósitode construir elpoligono de velocidades.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 101/508
VELOCIDAD 87También puede encontrarse el vector velocidad V F por cúalquiera de los métodos anteriores,usando los puntos e, D y F del eslabón 4. El resultado esVF = 31.8 pie/s Resp.Ejemplo 3-2 El meca nismo de corredera-manivela excéntrico que se ilustra en la fi
gura 3-8a, estáimpulsado por la corredera 4 co n una rapidez Ve = 10 mis hacia la izquierda, enla fase i ndicada.Determínese la velocidad insta ntánea del punto D y las velocidades angulares de loseslabones2y 3.SOLUCION Se escoge la escala de velocidades y el polo Ov y se traza Ve, localizando co n ello elpunto e como se ilustra e n la figura 3-8b. Luego se escriben ecuaciones simultáneas para lavelocidad del punto B(lO)
y se resuelve para la ubicación del punto B en el polígo no de velocidades.Una vez determinados los puntos B y e, se puede construir la ímage n de velocidades deleslabón 3 como se indica, para localizar el punto D; después se mide a escala la recta OvD, loque daVD=12.0m/s Resp.Las velocidades angulares de los eslabones 2 y 3 son«>2 VBARBAú},=10.0 mis200 di
0.05 m= ra s cmr7.5 mIs0.14 m= 53.6 rad /s crnrResp. (11)Resp. (12)En este segundo problema de ejemplo, figura 3-8b, la imagen de velocidades decada eslabón se indica en este poligono. Si se desarrolla por completo el análisisde cualquier problema, se tendrán imágenes de velocidades para cada eslabón delmecanismo. Los siguientes puntos son ciertos en general y se pueden verificar en
los ejemplos anteriores:D(a)Imagen deleslabón 3BImagen deleslabón 4lb)Figura 3-8 Ejemplo 3-2: a) diagrama a escela de un mecanismo de corredera y manivela (las dime nsionesse dan en milímetros); b) poligcno de velocidades.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 102/508
88 TEORIA DE MAQUINAS y MECANISMOS1 . La imagen de velocidades de cada eslabón es una reproducción a escala de laforma del eslabón en el polígono de velocidades.2. La imagen de velocidades de cada eslabón se gira 90° en la dirección de lavelocidad angular del eslabón.3. Las letras que identifican los vértices de cada eslabón son las mismas que se enc
uentranen el polígono de velocidades y están colocadas en tomo a la imagende velocidades en el mismo orden y en la misma dirección angular que alrededordel eslabón.4. La (azón del tamaño de la imagen de velocidades de un eslabón al tamaño deleslabón mismo, es igual a la magnitud de la velocidad angular de éste. Engeneral, no es la misma para diferentes eslabones en el mismo mecanismo.5. La velocidad de todos los puntos de un eslabón en traslación es igual y la velocidad angular es cero. Por consiguiente, la imagen de velocidades de uneslabón que se está trasladando se reduce hasta un solo punto en el polígono develocidades.6. El punto Oven el polígono de velocidades es la imagen de todos los puntos con
velocidad absoluta cero. Es la imagen de velocidades del eslabón fijo.7. La velocidad absoluta de cualquier punto de cualquier eslabón se representa por medio de la recta que va de Ova la imagen del punto. El vector de diferencia develocidad entre dos puntos cualesquiera, por ejemplo P y Q, se representamediante la recta que va del punto imagen P al punto imagen Q.3-5 VELOCIDAD APARENTE DE UN PUNTOEN UN SISTEMA DE COORDENADAS EN MOVIMIENTOAl analizar las velocidades de varios componentes de máquinas, se encuentran confrecuencia problemas en los que resulta conveniente describir cómo se mueve unpunto en relación con otro eslabón móvil; pero, en cambio, totalmente inconvenientedescribir el movimiento absoluto del punto. Un ejemplo de esto es el que sepresenta cuando un eslabón rotatorio contiene una ranura por la que otro eslabón
está obligado a deslizarse. Si se tienen como cantidades conocidas el movimientodel eslabón que contiene a la ranura y el movimiento relativo de deslizamiento que se lleva a efecto dentro de ésta, quizá se desee encontrar el movimiento absolutodel elemento deslizante. Fue precisamente para problemas de esta índole que sedefinió en la sección 4 el vector de desplazamiento aparente, y ahora se desea ampliareste concepto para abarcar a la velocidad.En la figura 3-9 se recuerda la definición del vector de desplazamiento aparente.Un eslabón rígido que tiene cierto movimiento general lleva un sistema de coordenadasX2Y2Z2 fijo a él. En un instante determinado t, el sistema de coordenadas
se encuentra en X2Y2Z2 y, tras un pequeño intervalo I1 t , se mueve a su nuevo puntoxíYízí. Todos los puntos del eslabón 2 se mueven con el sistema de coordenadas.De igual modo, durante el mismo intervalo de tiempo, otro punto P3 de otroeslabón, el 3, está restringido de alguna manera a moverse siguiendo una trayec-
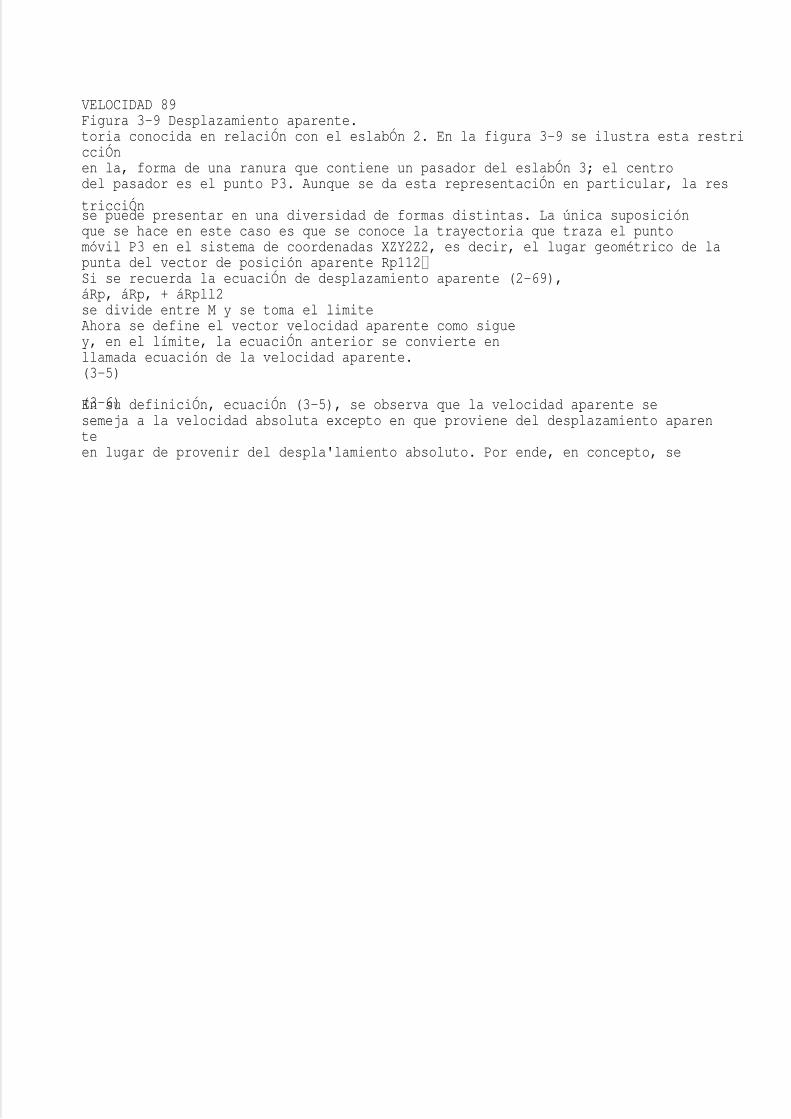
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 103/508
VELOCIDAD 89Figura 3-9 Desplazamiento aparente.toria conocida en relaciÓn con el eslabÓn 2. En la figura 3-9 se ilustra esta restricciÓnen la, forma de una ranura que contiene un pasador del eslabÓn 3; el centrodel pasador es el punto P3. Aunque se da esta representaciÓn en particular, la res
tricciÓnse puede presentar en una diversidad de formas distintas. La única suposiciónque se hace en este caso es que se conoce la trayectoria que traza el puntomóvil P3 en el sistema de coordenadas XZY2Z2, es decir, el lugar geométrico de lapunta del vector de posición aparente Rp112 Si se recuerda la ecuaciÓn de desplazamiento aparente (2-69),áRp, áRp, + áRpll2se divide entre M y se toma el limiteAhora se define el vector velocidad aparente como siguey, en el límite, la ecuaciÓn anterior se convierte enllamada ecuación de la velocidad aparente.(3-5)
(3-6)En su definiciÓn, ecuaciÓn (3-5), se observa que la velocidad aparente sesemeja a la velocidad absoluta excepto en que proviene del desplazamiento aparenteen lugar de provenir del despla'lamiento absoluto. Por ende, en concepto, se
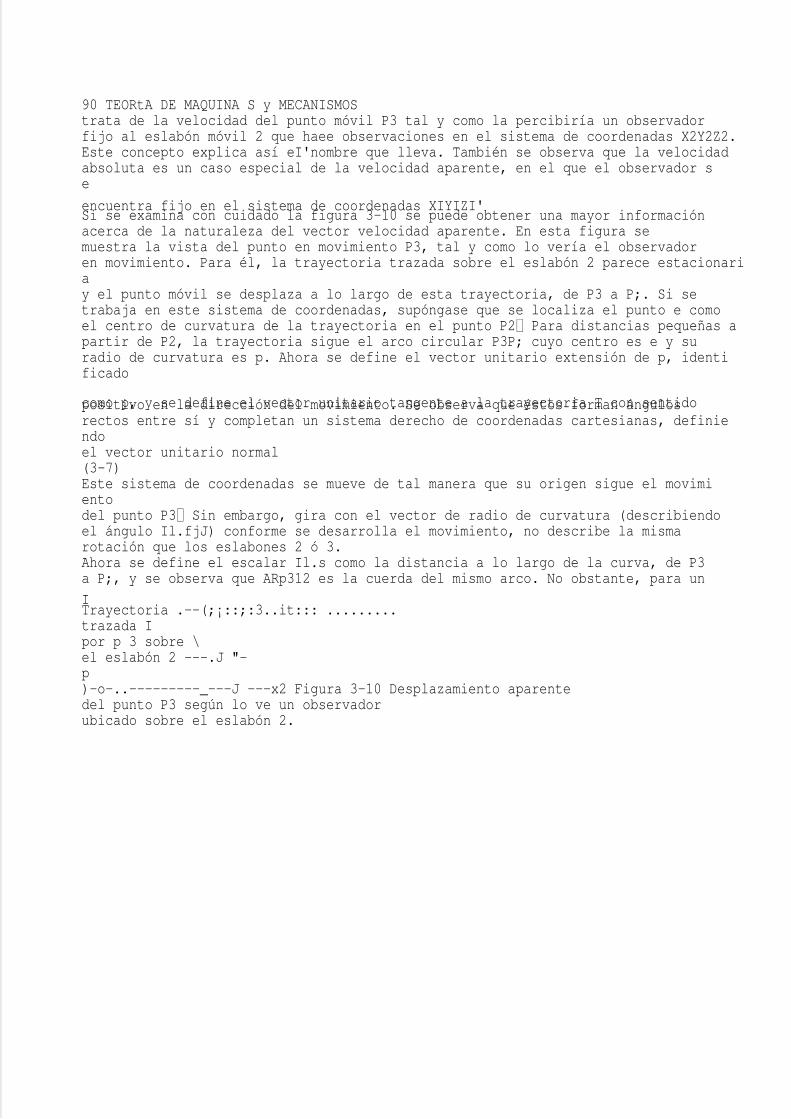
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 104/508
90 TEORtA DE MAQUINA S y MECANISMOStrata de la velocidad del punto móvil P3 tal y como la percibiría un observadorfijo al eslabón móvil 2 que haee observaciones en el sistema de coordenadas X2Y2Z2.Este concepto explica así eI'nombre que lleva. También se observa que la velocidadabsoluta es un caso especial de la velocidad aparente, en el que el observador se
encuentra fijo en el sistema de coordenadas XIYIZI'Si se examina con cuidado la figura 3-10 se puede obtener una mayor informaciónacerca de la naturaleza del vector velocidad aparente. En esta figura semuestra la vista del punto en movimiento P3, tal y como lo vería el observadoren movimiento. Para él, la trayectoria trazada sobre el eslabón 2 parece estacionariay el punto móvil se desplaza a lo largo de esta trayectoria, de P3 a P;. Si setrabaja en este sistema de coordenadas, supóngase que se localiza el punto e comoel centro de curvatura de la trayectoria en el punto P2 Para distancias pequeñas apartir de P2, la trayectoria sigue el arco circular P3P; cuyo centro es e y suradio de curvatura es p. Ahora se define el vector unitario extensión de p, identificado
como p, y se define el vector unitario tangente a la trayectoria T con sentidopositivo en la dirección del movimiento. Se observa que éstos forman ángulosrectos entre sí y completan un sistema derecho de coordenadas cartesianas, definiendoel vector unitario normal(3-7)Este sistema de coordenadas se mueve de tal manera que su origen sigue el movimientodel punto P3 Sin embargo, gira con el vector de radio de curvatura (describiendoel ángulo Il.fjJ) conforme se desarrolla el movimiento, no describe la mismarotación que los eslabones 2 ó 3.Ahora se define el escalar Il.s como la distancia a lo largo de la curva, de P3a P;, y se observa que ARp312 es la cuerda del mismo arco. No obstante, para un
ITrayectoria .--(;¡::;:3..it::: .........trazada Ipor p 3 sobre \el eslabón 2 ---.J "-p)-o-..---------_---J ---x2 Figura 3-10 Desplazamiento aparentedel punto P3 según lo ve un observadorubicado sobre el eslabón 2.
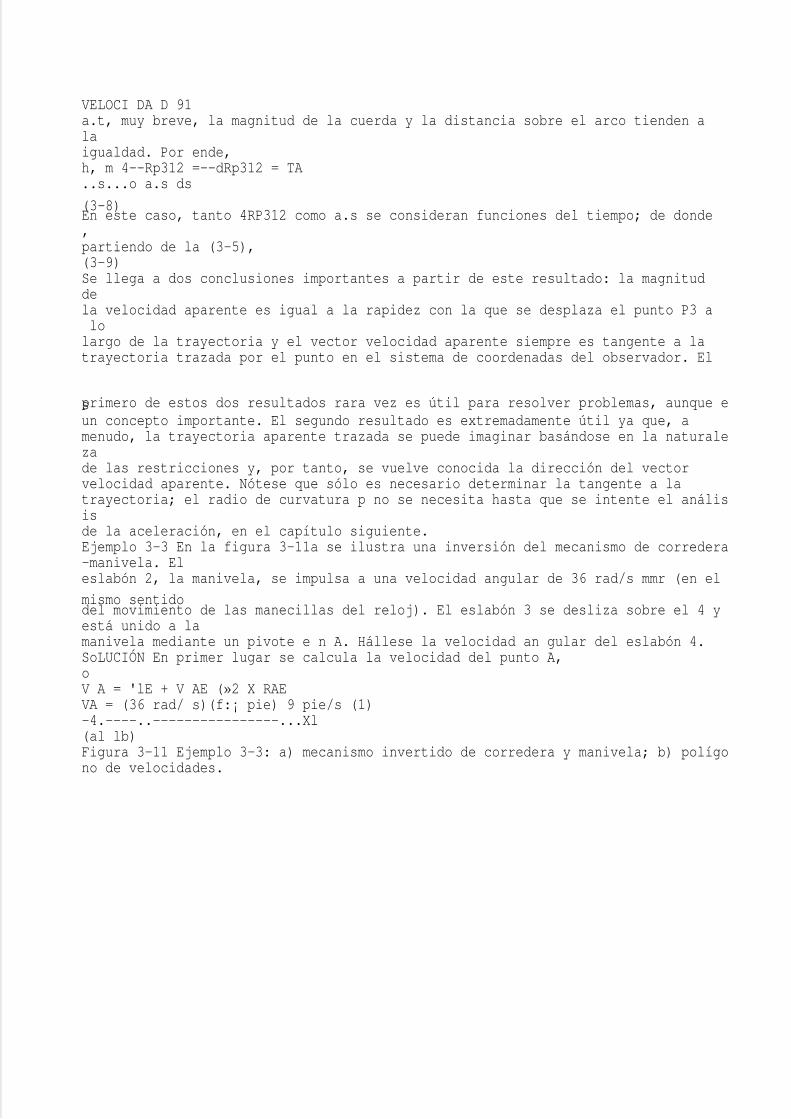
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 105/508
VELOCI DA D 91a.t, muy breve, la magnitud de la cuerda y la distancia sobre el arco tienden alaigualdad. Por ende,h, m 4--Rp312 =--dRp312 = TA..s...o a.s ds
(3-8)En este caso, tanto 4RP312 como a.s se consideran funciones del tiempo; de donde,partiendo de la (3-5),(3-9)Se llega a dos conclusiones importantes a partir de este resultado: la magnituddela velocidad aparente es igual a la rapidez con la que se desplaza el punto P3 alolargo de la trayectoria y el vector velocidad aparente siempre es tangente a latrayectoria trazada por el punto en el sistema de coordenadas del observador. El
primero de estos dos resultados rara vez es útil para resolver problemas, aunque esun concepto importante. El segundo resultado es extremadamente útil ya que, amenudo, la trayectoria aparente trazada se puede imaginar basándose en la naturalezade las restricciones y, por tanto, se vuelve conocida la dirección del vectorvelocidad aparente. Nótese que sólo es necesario determinar la tangente a latrayectoria; el radio de curvatura p no se necesita hasta que se intente el análisisde la aceleración, en el capítulo siguiente.Ejemplo 3-3 En la figura 3-11a se ilustra una inversión del mecanismo de corredera-manivela. Eleslabón 2, la manivela, se impulsa a una velocidad angular de 36 rad/s mmr (en el
mismo sentidodel movimiento de las manecillas del reloj). El eslabón 3 se desliza sobre el 4 yestá unido a lamanivela mediante un pivote e n A. Hállese la velocidad an gular del eslabón 4.SoLUCIÓN En primer lugar se calcula la velocidad del punto A,oV A = 'lE + V AE (»2 X RAEVA = (36 rad/ s)(f:¡ pie) 9 pie/s (1)-4.----..----------------...Xl(al lb)Figura 3-11 Ejemplo 3-3: a) mecanismo invertido de corredera y manivela; b) polígono de velocidades.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 106/508
92 TEORfA DE MÁQUINAS Y MECANISMOSy se representa gráfícamente partiendo del polo Ov, a fin de localizar el punto A enel polígonode velocidades, como se muestra en la figura 3-11b.Luego se establece una distinción entre dos puntos diferentes, B3 y B4, en la ubicación del
deslizamiento. El punto B} forma parte del eslabón 3 y B4 del eslabón 4; pero, en elinstanteilustrado, los dos coinciden. Nótese que, como lo ve un observador ubicado en el eslabón 4, elpunto B3 parece deslizarse a lo largo del eslabón 4 definiendo con ello una trayectoria rectilinea alo largo de CF. Por ende, se puede escribir la ecuación de la velocidad aparente como(2)Cuando el punto B3 se relaciona con A y el punto B4 con D, por medio de las diferencias develocidades, el desarrollo de la (2) da
\,J\¡ ... v O oV o";V A + V BV\ VD + V 8.D + V 8,/4 (3)en donde ValA es perpendicular a RBA, V B,D es perpendicular a RBD (mostrado a trazos) y V 8,/4tiene.una dirección definida por la tangente a la trayectoria del deslizamiento enB.Aunque la (3) parece tener tres incógnitas, si se observa que V BlA Y V 8,/4 tienen direccionesidénticas, la ecuación se puede reordenar comovV oV aV V A + (V 8,A - V By.) V B.D (4)y la diferencia escrita entre paréntesis se puede tratar como un solo vector de dirección conocida.Ahora, la ecuación se reduce a dos incógnitas y se puede resolver gráficamente para lo
calizar elpunto B4 en el polígono de velocidades.La magnitud RBD se puede calcular o medir en el diagrama y V B..D se puede determinar a escalabasándose en el polígono de velocidades (la recta a trazos que va de 0v a B.). Por lo tanto,7.3 pie/sI 1.6/12 pie 7.55 radfs cmr Resp. (5)Aunque según enunció el problema, ahora está completo, el poligono de velocidad se haextendidopara incluir las imágenes de los eslabones 2, 3 y 4. Al hacerlo, fue necesario consignar
que, puesto que los eslabones 3 y 4 permanecen siempre perpendiculares entre si,deben girar a lamisma velocidad. Por ende, (0) = 004' Esto permitió calcular V HA OOJ X RBA Y situar el punto dela imagen de veiocídades BJ, También se observa que las imágenes de velocidades de loseslabones3 y 4 tienen un tamaño comparable puesto que 003 004- No obstante, tienen una escalamuy distinta a la de imagen de velocidades del eslabón 2, la recta OvA. puesto que002 es unavelocidad angUlar mayor.Otro método para resolver el mismo problema evita la necesidad de combinar los términos
como en la ecuación (4). Si se considera un observador viajando sobre el eslabón 4 yse le preguntacuál veria como trayectoria del punto A en su sistema de coordenadas, se descubre
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 107/508
que éstatrayectoria es una recta paralela a la recta CF. como se indica en la figura 3-110. Ahora definamosun punto de esta trayectoria como AJ En el instante ilustrado, el punto .A4 coincide conlos puntos A2 y A4. Sin embargo, A4 no se mueve con el pasador; está unido al eslabón 4 y gira
con la trayectoria en torno al punto lijo D. Puesto que es factible identificarla trayectoria trazadapor A, y A4 sobre el eslabón 4, se puede escribir la ecuación de la velocidad aparenteV A, V A, + V A,14y, puesto que el punto A4 forma parte del eslabón 4,OVi\4 = V/v +Vi\4D(6)(7)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 108/508
VELOCIDAD 93Sustituyendo la ecuación (6) en la (7) se obtiene-..Iv 0\/ ov'V A, V A<D + V A,/4 (8)en donde V A4D es perpendicular a RAD y V A,J4 es tangente a la trayectoria. Cuando se resuelve
esta ecuación se localiza el punto imagen A¡ en el polígono de velocidades y se obtiene unasolución para W4 = V A<d RAf>. Entonces se puede hallar e l resto del polígono de velocidades comose acaba de e x plicar.Sería erróneo intentar la aplicación de la ecuaciónVA< VA,+VA</2en lugar de la (6), puesto que la trayectoria trazada por el punto A4 en el sistema de coordenadasurudo al eslabón 2 no se cono ce . tEn el siguiente ejemplo se proporciona un caso que ar roja más luz sobre la naturaleza y uso
de la ecuación de la velocidad aparente.F.jemplo 3-4 Como se muestra en la f"tgura 3-12, un avión que viaja con una velocidad de 300kmIh está describiendo un circulo cuyo radio es de 5 km Y su centro se ubica en C.Al hacerlo, elpiloto ve un cohete a 30 km de distancia que se desplaza siguiendo una trayectoria recta, a 2 000km/h. ¿Cuál es la velocidad del cohete tal y como la ve el piloto del avión'?SoLUCIÓN Puesto que el avión sigue un curso circular, el punto e2 unido al sistema decoordenadasdel avión, pero coincidente con e, carece de movimiento. Por ende, la velocidad angulardel avión es
300km/h5km60rad/h crnr (9)La pregunta formniada requiere, obviamente, el cálculo de la velocidad aparente VR,/2; peroesto sólo se puede aplicar entre puntos coincidentes. Por lo tanto, se define otropunto R2, fijoal sistema de coordenadas que giran con el avión, pero localizado de forma que coincida con elcohete R;¡ en el instante que se ilustra. Como parte del avión, la velocidad de estepunto esV R, V P + .. X RRP = 300 k:; + ( 60
r:d)(30 km) 2 100 km/h (lO)en donde los valores se s uman algebraicamente porque los vectores son paralelos. Ahora puedecalcularse la velocidad aparente,VRl/2 = VR,-VR,100 krnlh Resp. (11)Por tanto, según lo ve el piloto del avión, el cohete parece estar retrocediendo a una velocidadde 100 km/h. Este resultado se entiende mejor si se considera el movimiento delpunto R2 Dicho punto se trata como si estuviera unido al avión y, por ende, al piloto le parece estacionarío.t Aunque el uso de esta ecuación sugerirla una comprensión deficiente da, no obstant
e, una solucióncorrecta. Si se encontrara la trayectoria cor respondiente, sería tangente a la que se usó en el punto

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 109/508
A. Dado que las tangentes a las dos trayectorias son la misma aun cuando las trayectorias no lo s ean,la solución darla un resultado exacto. Esto no se aplica al análisis de aceleración, capítulo 4; de donde, sedebe estudiar el concepto y evitar esta aplicación "retrógrada".
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 110/508
94 TEORíA DE MÁQUINAS Y MECANISMOSV P2 = 300 km/h-.;.... -.... --------- 30 km--··--,------...;,Figura 3-12 Ejemplo 3-4.Con todo, en e l sistema de coordenadas absolutas, este punto se está desplazandocon mayor
rapidez que el cohete; éste no se mantiene a la par con dicho punto y, de donde, al piloto leparece que está r etrocediendo.3-6 VELOCIDAD ANGULAR APARENTECuando dos cuerpos rígidos giran con velocidades angulares diferentes, la diferenciavectorial entre ambos se define como la velocidad angular aparente. Por consiguiente,(3-10)que también puede escribirse(3-11)Se verá que 003/2 es la velocidad angular del cuerpo 3 tal y como lo vería un observ
adorque está fijo al cuerpo 2 y que gira con él. Compárese esta ecuación con la(3-6) en lo que respecta a la velocidad aparente de un punto.3-7 CONTACTO DIRECTO Y CONTACTO POR RODADURADos elementos de un mecanismo que están en contacto directo entre si poseen unmovimiento relativo que puede o no comprender "Un deslizamiento entre loseslabones en el punto de contacto directo. En el sistema de leva y seguidor ilustradoen la figura 3-13a, la leva, el eslabón 2, impulsa al seguidor, eslabón 3,mediante el contacto directo. Se observa que si no fuera posible el deslizamientoentre los eslabones 2 y 3 en el punto P, el triángulo PAB formaría una armadura;de donde, es preciso que se tenga tanto un deslizamiento como una rotación entre
los eslabones.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 111/508
(alP3\\ \\ _--Vol' P ------ 2 /.4 , B(blFigura 3-13 Velocidad aparente de deslizamiento en un punto de contacto directo.
VELOCIDAD 95Establezcamos una distinción entre los dos puntos P2, fijo al eslabón 2 , y P3,fijo al eslabón 3. Son puntos coincidentes, localizados ambos en P en el instanteindicado; por lo tanto, se puede escribir la ecuación de la velocidad aparente,(3-12)Si se conocieran las dos velocidades absolutas V P3 Y V P2' podrían restarse parahallar V P3/2 Entonces podrían tomarse las componentes a lo largo de las direccionesdefinidas por la normal común y la tangente común a las superficies en elpunto del contacto directo. Las componentes V l'J Y V P2 a lo largo de la normal común deben ser iguales, y esta componente de V P3/2 debe ser cero. De otra manera
,los dos eslabones se separarían o bien se interferirían, y ambas cosas seoponen a la suposición básica de que el contacto persiste. La velocidad aparentetotal V PJ/2 debe encontrarse, por ende, a lo largo de la tangente común y es lavelocidad del movimiento del deslizamiento relativo dentro de la entrecara del contactodirecto. La figura 3-13b ilustra el polígono de velocidades de este sistema.En otros mecanismos es posible que exista contacto directo entre eslabones sinque se tenga un deslizamiento. En el sistema de leva y seguidor de la figura 3-14,por ejemplo, podría existir una gran fricción entre el rodillo, eslabón 3, y la superficiede la leva, eslabón 2, y restringuir a la rueda para que ruede apoyándose contra
la leva sin resbalar. De aquí en adelante se restringirá el término contacto porrodadura a situaciones sin deslizamiento. EÍ término "sin deslizamiento" implicaque la velocidad de deslizamiento aparente de la ecuación (3-12) es cero.(3-13a)Hay ocasiones en que esta ecuación recibe el nombre de condición de contacto porrodadura para la velocidad. Por la (3-12), también se puede escribir como(3-13b)lo cual afirma que las velocidades absolutas de dos puntos en contacto por rodadurason iguales.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 112/508
96 TEORíA DE MÁQUINAS Y MECANISMOS-.. Travectoria de C4sobre el eslabón 2Figura 3-14 Sistema de leva y seguidor con contacto por rodadura entre los eslabones 2 y 3.La solución gráfica del problema de la figura 3-14 se ilustra también allí mismo.
Dada úJ2, se puede calcular y situar en la gráfica la diferencia de velocidadV ..B , localizando así el punto P2 en el poligono de velocidades . Con la (3- 1 3) , correspondientea la condición de contacto por rodadura, también se marca este puntocomo P3. A continuación, al escribir ecuaciones simultáneas para V c, utilizandoV CP3 Y V CA, es factible encontrar el punto C de la imagen de velocidades C. Porende, se pueden hallar Ú)3 y ú)4, partiendo de V CP y V CA, respectivamente.Otro método para resolver el mismo problema comprende la definición de unpunto ficticio C2, que se localiza instantáneamente como concidiendo con los puntosC3 y c.", pero que se sobreentiende que está fijo al eslabón 2 y se mueve con él,
como lo muestra el t riángulo sombreado BPC. Cuando se usa el concepto deimagen de velocidades para el eslabón 2, se puede localizar el punto C2 de laimagen de velocidades. Notando que el punto C3 (y el C4 ) describe una trayectoriaconocida sobre el eslabón 2, se puede escribir y resolver la ecuación de la velocidadaparente que comprende a V C,J2, obteniendo con ello la velocidad V C4 (y ú)4, siasi se desea) sin necesidad de recurrir al punto de contacto directo. Este segundométodo seria necesario si no se hubiera supuesto un contacto por rodadura (sindeslizamiento) en P.3-8 ANÁLISIS D E LA VELOCIDAD UTILIZANDOÁLGEBRA COMPLEJA
Por lo que se dijo en la sección 2-8, se recordará que el álgebra compleja proporciona un planteamiento alternativo para los problemas bidimensionales de la cinemática.Como se vio, el planteamiento de álgebra compleja ofrece la ventaj a deuna mayor exactitud y su forma resulta adecuada para hallar soluciones mediantecomputadora digital , en un gran número de posiciones, una vez que se escribeel programa. Por otro lado, la resolución de la ecuación de cierre del circuito, parasus variables de posición desconocidas, es un problema no lineal y puede conducira manipulaciones algebraicas tediosas . Por fortuna, como se verá, la ampliación

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 113/508
VELOCIDAD 97del método de álgebra compleja para incluir el análisis de la velocidad conducea un conjunto de ecuaciones lineales y su solución es bastante directa.Recordando la forma compleja polar de un vector bidimensional de laecuación (2-28),R RejO
se encuentra la forma general de su derivada respecto al tiempoR. = -dR = R'eJ.IJ + j9.R eJ.IJdt(3-14)en donde R y 8 denotan las rapideces de cambio respecto al tiempo de la magnitud y el ángulo de R, respectivamente. En los siguientes ejemplos se verá que elprimer término de esta ecuación representa casi siempre una velocidad aparente yel segundo una diferencia de velocidad. Los métodos ilustrados en estos ejemplosfueron desarrollados por Raven. Aunque el trabajo originalt propone métodosaplicables tanto a mecanismos planos como a espaciales, aquí sólo se verán los aspectos
planos.Para ilustrar el método de Raven, analicemos la inversión del mecanismo decorredera-manivela ilustrado en la figura 3- 1 5a. Se considerará que el eslabón 2,elimpulsor, tiene una posición angular conocida 92 y una velocidad angular conocidalIh en el instante considerado. Lo que se busca es obtener expresiones parala velocidad angular del eslabón 4 y la velocidad absoluta del punto P.Para simplificar la notación en este ejemplo se usará el simbolismo estipuladoen la figura 3- 15b para los vectores de diferencia de posición ; por lo tanto, RAB sedenota por r" RC2A se denota por r2, Y RC4B por r4. Así pues, en términos de estossímbolos, la ecuación de cierre del circuito es(a)
en donde rl tiene magnitud y dirección constantes.tt El vector r2 tiene magnitudconstante y su dirección (J2 varía; pero es el ángulo de entrada. Se supone que seconoce 92 o, más específicamente, que todas las demás incógnitas se resolveráncomo funciones de (J2. El vector r4 tiene magnitud y dirección desconocidas.Al reconocer que se trata del caso 1 (Sec. 2-8), se obtiene la solución de la posiciónpartiendo de las ecuaciones (2-30) y (2-3 1).(b)(e)t F. H. Raven, "Velocity and Acceleration Analysis of Plane and Space Mechanismsby Means ofIndependent- Position Equations", J. Appl. Mech., ASME Trans, series E, vol. 80,
pp. 1-6, 1958.tt Nótese en particular que el ángulo de rl es 01 = 1800 Y no cero.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 114/508
98 TEORíA DE MÁQUINAS Y MECANISMOS( a ) ( b )Figura 3·15 Mecanismo invertido de corredera-manivela.La solución de la velocidad se inicia derivando la ecuación de cierre del circuito(a) con respecto al tiempo. Al aplicar la forma general, ecuación (3-14), acada uno de los términos de esta ecuación sucesivamente y recordando que r" eh
Y '2 son constantes, se obtiene(d)Puesto que ih y é4 son lo mismo que Ú)2 y ú)4, respectivamente, y en vista de quese reconoce quees evidente que la (d) es, en efecto, la forma complej a polar de la ecuación de lavelocidad aparenteV C2 V c. + V C¿14(Esto se señala sólo con fines de comparación y no es un paso necesario en elproceso de resolución.)La solución de la velocidad se efectúa aplicando la fórmula de Euler paraseparar la ecuación (d) en sus componentes real e imaginaria . Esto da
(e)(j)Cuando estas dos ecuaciones se resuelven simultáneamente para las dos incógnitasf4 y ú)4, se obtiene(3- 1 5)(3- 16)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 115/508
VELOCIDAD 99Aunque se pudieran sustituir las variables '4 y 84 por sus expresiones dadas enlasecuaciones ( b) y (e), para reducir estos resultados a funciones de f}z y Wz únicamente,las formas anteriores se consideran suficientes puesto que al escribir un
programa de computadora, normalmente se encuentran primero los valores numéricosde '4 y (J4 en el curso del análisis de posición, y estos valores numéricos sepueden emplear entonces para determinar '4 y W4 en cada fase del ángulo (Jz.Para encontrar la velocidad del punto P se escribe(g)y se aplica la (3-14) para derivar con respecto al tiempo, recordando que RpB es una longitud constante. Esto conduce a(h)que, al hacer la sustitución de lo expresado en la (3- 1 6), se convierte en(3- 17)Las componentes horizontal y vertical son
(i)(j)Véase el siguiente problema que sirve como otra ilustración del método deRaven.Ejemplo 3-5 Desarróllese una ecuación para la relación entre las velocidades angularesde lasmanivelas de entrada y salida de un eslabonamiento de cuatro barras.SOLUCIÓN Recuérdese la ecuación de cierre del circuito dada en la sección 2-10, ecuación (n),(1)Si s e toma en cuenta que todas las longitudes permanecen constantes, s e aplical a (3-14) parahacer la derivada respecto al tiempo.
Esto daAl igualar las partes real e imaginaria, y reordenar los términos, se obtieneW3RCB sen 03 - W.RCD senO. = - W2RBA sen02W3RCB cos 03 - w.RCD COS O. = - W2RBA COS O2(2)(3)(4)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 116/508
100 TEORlA DE MÁQUINAS Y MECANISMOSPor último, se resuelven estas dos ecuaciones simultáneas para úll y úl4.RBA sen(tlz - tl4)Wl Res sen (84 - fh) (.ú2RBA sen ( tl2 - ti)w4
RCD sen (8. - lMw2 Resp.(3-18)(3-19)Puesto que se conocen las soluciones para ti] y tl4 , p artiendo de las ecuaciones (2-59) y (2-58),esta ecuación para "'4 se puede evaluar numéricamente y se considera una solución completa.Obsérvese que en los dos problemas anteriores las ecuaciones simultáneas quese resolvieron eran lineales. Esta no fue una coincidencia sino de algo que resultacierto en todas las soluciones relativas a la velocidad; se debe al hecho de que
laecuación general (3-14) es lineal en las variables de velocidad. Cuando se toman lascomponentes real e imaginaria, los coeficientes pueden hacerse complicados; pero las ecuaciones siguen siendo lineales con respecto a las incógnitas de velocidad.Porlo tanto, su solución es directa.Otro indicio de la linealidad de las relaciones de velocidad es el que se observaal recordar que en las soluciones gráficas para la velocidad de las secciones previas,fue posible elegir un factor escalar arbitrario para un polígono de velocidades. S
ise duplica la velocidad de entrada de un mecanismo, el factor escalar del polígono de velocidad se podría duplicar y el mismo polígono seguiría siendo válido. Esta esuna característica de las ecuaciones lineales.También vale la pena hacer notar que tanto la (3-18) como la (3-1 9) incluyen asen (04 - (3) en sus denominadores . En general , cualqnier problema de análisis dela velocidad tendrá denominadores similares en la solución de cada una de las incógnitasde velocidad. Estos denominadores son el determinante de la matriz de loscoeficientes de las incógnitas de las ecuaciones lineales, como se reconocerá al
recordar la regla de Cramer. En el caso del eslabonamiento de cuatro barras, sepuede observar en la figura 2-1 3 , que 04 - 03 es el ángulo de transmisión. Cuandoel ángulo de transmisión se hace pequeño, la razón de la velocidad de salida a la deentrada se hace muy grande y se generan dificultades.3-9 ANÁLISIS DE LA VELOCIDAD MEDIANTEÁLGEBRA VECTORIALSe expuso en la sección 2-9 el método de Chace para el análisis de posición. Aquíse mostrará la manera en que tal planteamiento se aplica al análisis de velocidad de los eslabonamientos . El método se ilustra resolviendo una vez más el mecanismoinvertido de corredera y manivela de la figura 3-15 .El procedimiento se inicia escribiendo la ecuación de cierre del circuito(a)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 117/508
VELOCIDAD 101Las relaciones de velocidad se encuentran derivando esta ecuación con respecto altiempo. La derivada de un término tipico se convierte en. d "" .. A AR =-dt (RR) = RR+RR (b)Sin embargo, puesto que R tiene longitud constante, y en virtud de que casi siem
-. ;..pre gua con uno de los eslabones, R se puede expresar como(3-20)a partir de lo cual la ( b) se convierte enSi se usa esta forma general y se reconoce que las magnitudes rl Y r2 Y ladirección "1 son constantes, se puede tomar la derivada respecto al tiempo dela ecuación de cierre del circuito (a). Esto da(e)Puesto que se supone que se conocerian r4 Y r4 gracias a un análisis de posiciónprevio, obtenido quizá con el método Chace de la sección 2-9, y dado que W2 esuna velocidad impulsora conocida, las dos únicas incógnitas de esta ecuación son
las velocidades ;-4 y W4.En lugar de tomar las componentes de la ecuación (e) en las direcciones horizontal y vertical. lo que conduciría a dos ecuaciones simultáneas con dos incógnitas,el método de Chace conduce a la eliminación de una incógnita eligiendo concuidado las direcciones a lo largo de las cuales se toman las componentes. Porejemplo. en la (e) se observa que el vector unitario r4 es perpendicular a k x r4 Y.por ende.(d)Se aprovecha esta circunstancia para eliminar la incógnita ;-4. Si se toma el productoescalar de cada término de la (e) con k x "4, se obtiene
w2rik X "2) (k x "4) = W4r4de lo cual se obtiene W4(e)Del mismo modo se puede tomar el producto escalar de la (e) con el vector unitario"4 y eliminar así a W4. Esto da(j)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 118/508
102 TEORíA DE MÁQUINAS Y MECANISMOSSe puede demostrar con gran facilidad que estas soluciones son, de hecho, lasmismas que se obtuvieron al aplicar el método de Raven. Partiendo de la (e) sepuede escribiry, del mismo modo,Entonces,
i jO OCOS O2 sen fhk1 = - sen 82 i + cos 82 jO(k x 1'2) ' (k x 1'4) = (- sen 82 i + cos ()2 j) . (- sen 84 i + cos 84 b= sen 82 sen ()4 + cos 82 cos 04= cos (84 - OZ)y, análogamente,(g)(h)
Cuando los términos de las ecuaciones (g) y (h) se sustituyen en las ecuaciones (e) y(j), los resultados se parean idénticamente a los que se obtuvieron con el métodode Raven, ecuaciones (3-15) y (3-16).3-10 CENTRO INSTANTÁNEO DE VELOCIDADUno de los conceptos más interesantes de la cinemática es el de un eje instantáneode velocidad para los cuerpos rígidos que se mueven en relación con otro. En particular,se verá que existe un eje común a ambos cuerpos y en torno al cual puedeconsiderarse que cualquiera de ellos gira con respecto al otro.Puesto que el estudio que se va a hacer de estos ejes se restringirá a movimientos planos, t cada eje es perpendicular al plano del movimiento. A estos ejes se les
asignará el nombre de centros o polos instantáneos. Estos centros instantáneos seconsideran como un par de puntos coincidentes, uno en cada cuerpo, en torno alos cuales uno de estos tiene una rotación aparente en relación con el otro. Estapropiedad es verdadera sólo instantáneamente y al siguiente instante surgirá unnuevo par de puntos coincidentes que se convertirán en el centro instantáneo. Porende, no es correcto mencionar a un centro instantáneo como el centro de rotación,ya que generalmente no se localiza en el centro de curvatura de la trayectoriaaparente que genera un punto de un cuerpo con respecto al sistema de coordenadas del otro. Sin embargo, incluso con esta restricción, se encontrará que los centrost En el caso de movimientos tridimensionales. este eje recibe el nombre de eje d
e tomillo instantáneo.El trabajo clásico que cubre sus propiedades es el que realizara R. S. Ball, A Treatise on (heTheory 01 Screws, Cambridge University Press, Cambridge, 1900.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 119/508
VELOCIDAD 103instantáneos contribuyen de manera sustancial a entender la cinemática del movimientoplano.El centro instantáneo de velocidad se define como la ubicación instantánea deun par de puntos coincidentes de dos cuerpos rígidos diferentes para los que las
velocidades absolutas de los dos puntos son iguales. También s e puede definircomo la ubicación de un par de puntos coincidentes de dos cuerpos rígidos diferentes para los que la velocidad aparente de uno de los puntos es cero tal y como lapercibe un observador situado en el otro cuerpo.Consideremos un cuerpo rígido, 2, que tiene cierto movimiento general relativoal plano x¡y¡; el movimiento podría ser de traslación, de rotación o unacombinación de ambos. Como se ilustra en la figura 3 - 1 60, supóngase que el puntoA del cuerpo tiene una velocidad conocida V A Y que el cuerpo posee una velocidadangular conocida 002. Cuando se conocen estas dos cantidades, s e puede hallar la
velocidad de cualquier otro punto del cuerpo, basándose en la ecuación de ladiferencia de velocidad. Supóngase que se define un punto P, por ejemplo, cuyadiferencia de posición RpA respecto al punto A se elige como(3-22)Debido al producto vectorial se ve que el punto P está localizado s obre la perpendiculara V A , Y el vector RpA está girado respecto a la dirección de V A, en la direcciónde 002, como se muestra en la figura 3- 1 6b . La longitud de RpA se puede calculara partir de la ecuación anterior, y se puede localizar el punto P. Se observaque su velocidad esPero, al reemplazar este triple producto con una identidad vectorial se obtiene(a)
Figura 3-16
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 120/508
104 TEORIA DE MÁQUINAS Y MECANISMOS'Puesto que la velocidad absoluta del punto particular P elegido es cero, lo mismoque la velocidad del punto coins;idente del eslabón fijo, este punto P es el centroinstantáneo entre los eslabones 1 y 2.
Ahora se puede encontrar la velocidad de cualquier tercer punto e del cuerpoen movimiento,Ve = ..O + VCP = ú)2 x Rcp (b)como se ilustra en la figura 3- 1 6b.El centro instantáneo se puede localizar con mayor facilidad cuando se dan lasvelocidades absolutas de dos puntos. En la figura 3- 1 7 a, supóngase que los puntos A y e tienen las velocidades conocidas V A Y V c. Las perpendiculares a V A YV c seintersecan en P , que es el centro instantáneo. En la figura 3- 1 7 b se muestra cómolocalizar el centro instantáneo P cuando los puntos A, e y P están sobre la mismalínea recta.
En general, el centro instantáneo entre dos cuerpos no es un punto estacionario,sino que su ubicación cambia en relación con ambos cuerpos, conforme sedesarrolla el movimiento, y describe una trayectoria o lugar geométrico sobre cada uno de ellos. Estas trayectorias de los centros instantáneos, llamados centradas,seestudiarán en la sección 3- 1 7 .Puesto que se ha adoptado la convención de numerar los eslabones de unmecanismo, es conveniente designar un centro instantáneo utilizando los númerosde los dos eslabones asociados a él. Así pues, Pn identifica el centro instantáneoentre los eslabones 3 y 2. Este mismo centro se podría identificar como P23 , ya queel orden de los números carece de importancia. Un mecanismo tiene tantos centros
instantáneos como formas existan de parear los números de los eslabones. Por lotanto, el número de centros instantáneos en un mecanismo de n eslabones esN = n(n - 1) 2y,O..,i --------------------- Xl (b)Flgura 3-17 Localización d e u n centro instantáneo partiendo d e dos velocidades conocidas.(3-23)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 121/508
3-11 TEOREMA DE ARONHOLD-KENNEDYDE LOS TRES CENTROSVELOCIDAD 105Por lo que establece la ecuación (3-23), el número de centros instantáneos en uneslalxmamiento de cuatro barras es seis. Como se ve en la figura 3 - 1 8a, es factible
identificar cuatro de ellos por simple observación; se ve que los cuatros pasadoresse pueden identificar como los centros instantáneos P12, P23, P34 Y P14 puesto quecada uno de ellos satisface la definición. Por ejemplo , P23, es un punto del eslabón2 en torno al cual parece girar el eslabón 3; se trata de un punto del eslabón 3 que carece de velocidad aparente, visto desde el eslabón 2; es un par de puntos coincidentesde los eslabones 2 y 3 que poseen la misma velocidad absoluta.Un buen método para tener presente cuáles centros instantáneos se han encontrado,consiste en espaciar los números de eslabón en torno al perímetro de un
círculo, como se indica en la figura 3-1 8b. A continuación, conforme se identificacada polo, se traza una recta que conecta el par correspondiente de números de los esÍabones. En la figura 3- 1 8b se muestra que se han localizado P12 P23, P34 YP14 ; también muestra rectas faltantes, puesto que aún no se encuentra Pl3 y P24 Estos dos centros no se pueden encontrar aplicando visualmente la definición.Después de encontrar tantos centros instantáneos como sea posible por observación,es decir, localizando los puntos que satisfacen obviamente la definición,los otros se localizan aplicando el teorema de Aronhold-Kennedy (que con frecuenciasólo se llama teorema de Kennedy t) de los tres centros. Este teoremaafirma que 'los tres centros instantáneos compartidos por tres cuerpos rígidos enmovimiento relativo uno respecto a los otros ( ya sea que estén o no conectados) ,
están sobre la misma recta.Se puede demostrar este teorema por contradicción, como se ilustn.. en lafigura 3-19. El eslabón 1 es un marco estacionario , y el centro instantáneo P 12 se localiza en donde el eslabón 2 se conecta a él por medio de un pasador o espiga.Del mismo modo, PI3 está localizado en el pasador que conecta a los eslabones 1 y3 .t Este teorema lleva el nombre d e sus dos descubridores independientes, Aronhold, 1872, y Kennedy,1886. Se conoce como teorema de Aronhold en los países de habla alemana y como teorema de Kennedy
en los de habla inglesa.3P34, 2Pn1 P14 1(a) lb)FiguraJ.18

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 122/508
106 TEORíA DE MÁQUINAS Y MECANISMOSFigura 3-19 Teorema de Aronhold-Kennedy.Las formas de los eslabones 2 y 3 son arbitrarias. El teorema de AronholdKennedy afirma que los tres centros' instantáneos P12, P13, y Pn deben estar sobrela misma recta, la que conecta a los dos pasadores . Supóngase que esto no fuera
cierto; de hecho, supongamos que Pn estuviera localizado en el punto identificadocomo P en la figura 3- 19. En este caso, la velocidad de P, como punto del eslabón 2, tendria la dirección VP2, perpendicular a RpPI2' Pero la velocidad de P, comopunto del eslabón 3 , tendría la dirección V P3' perpendicular a RpPI1 Las direccionesson coherentes con la definición de que un centro instantáneo debe tener velocidades absolutas iguales como parte de cualquiera de los eslabones. Por lo tanto, elpunto P elegido no puede ser el centro instantáneo P23 Se presenta esta mismacontradicción en las direcciones de V P2 Y V P3 para cualquier ubicación seleccionada
para el punto P, a menos que se elija sobre la recta que pasa por P12 y Pu.3-12 LOCALIZACIÓN DE CENTROS INSTANTÁNEOSDE VELOCIDADEn las dos últimas secciones se han visto varios medios para localizar centros instantáneosde velocidad . Con frecuencia se pueden localizar por simple observaciónde la figura de un mecanismo y buscando visualmente un punto que se aj uste a la definición, como por ejemplo, el centro de una articulación de pasador. También,una vez que se encuentran algunos centros instantáneos, se pueden localizar otrosapartir de ellos, aplicando el teorema de los tres centros. En la sección 3-10 sedemostró que es posible encontrar un centro instantáneo entre un cuerpo en
movimiento y el eslabón fijo si se conocen las direcciones de las velocidades absolutasde dos puntos del cuerpo, o si se conocen la velocidad absoluta de un puntoy la velocidad angular del cuerpo . El propósito de esta sección es ampliar esta listade técnicas y presentar ejemplos .Considérese el sistema de leva y seguidor que aparece en la figura 3-20. Loscentros instantáneos PI2 y Pl3 se pueden localizar, por simple observación, en
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 123/508
VELOCIDAD 10713@'Figura 3-20 Centros instantáneos de una leva de disco con seguidor de cara plana.los dos centros de los pasadores. No obstante, el centro instantáneo que falta, P23,
no es tan obvio. Según el teorema de Aronhold-Kennedy, debe estar sobre la recta queconecta a P12 y P13, pero, ¿en dónde? Tras cierta reflexión, se ve que la direcciónde la velocidad aparente V A2!3 debe ser a lo largo de la tangente común a los dos eslabones en movimiento en el punto de contacto y, como la percibe un observador situado en el eslabón 3, esta velocidad debe aparecer como resultado de la rotaciónaparente del cuerpo 2 en torno al centro instantáneo P23 Por consiguiente, P23debe encontrarse sobre la perpendicular a V Az!3. Esta recta ubica ahora a P23 comose indica. Es importante recordar el concepto ilustrado en este ejemplo, porque
con frecuencia es de gran utilidad para localizar los centros instantáneos de mecanismosque comprenden un contacto directo.Un caso especial de contacto directo, como se vio con anterioridad, es el contactopor rodadura sin deslizamiento. Considerando el mecanismo de la figura 3-21, selocalizan inmediatamente los centros instantáneos P12, P23 Y P34 Si elcontacto entre los eslabones 1 y 4 comprende algún deslizamiento, lo único que esfactible afirmar es que el centro instantáneo PI4 está localizado sobre la recta ver-(b)Figura 3-21 Centro instantáneo en un punto de contacto por rodadura.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 124/508
108 TEORIA DE MÁQUINAS Y MECANISMOStical que pasa por el punto de contacto. Sin embargo, si también se sabe que nohay deslizamiento, esto es, si se tiene contacto por rodadura, el centro instantáneose localiza en el punto de contacto. Este es también un principio general, comoresulta obvio al comparar la definición del contacto por rodadura, ecuación (3- 1 3)
,con la de un centro instantáneo; resultan ser equivalentes.Otro caso especial de contacto directo es evidente entre los eslabones 3 y 4 dela figura 3-22. En estas circunstancias existe una velocidad aparente (deslizamiento)V Ay4' entre los puntos A de los eslabones 3 y 4; pero no hay rotación aparenteentre los eslabones. En este caso, al igual que en la figura 3-20, el centro instantáneoP34 está a lo largo de una perpendicular común a la recta de deslizamientoconocida; pero ahora está localizado infinitamente lejos, en la dirección definidapor esta recta perpendicular. Se puede demostrar esta distancia infinita considerando
la inversión cinemática del mecanismo, en la que el eslabón 4 se hace estacionario.Al escribir la (3-22) para el mecanismo invertido, se observa que613/4 X V A ;/4 ----"- = 00W314(3-24)La dirección antes mencionada la confirma el numerador de esta ecuación. Tambiénse ve que, puesto que no hay rotación relativa entre los eslabones 3 y 4, eldenominador es cero y la distancia a P34 es infinita . Los otros centros instantáneosde la figura 3-22, se encuentran por observación o aplicando el teorema deAronhold-Kennedy. Obsérvese en esta figura cómo se utilizó la recta que pasa porPl4 y P34 (en el infinito) para l'ocalizar PI3.Un ejemplo final ilustrará otra vez los principios que se acaban de presentar.
Ejemplo 3-6 Localícense todo s los centros instántaneos del mecaniSmo presentado enla figura 2-23, suponiendo un contacto por rodadura entre los eslabones 1 y 2 .SoLUCION . Los centros instantáneos PIJ, P14 Y P'5i s e localizan por observación. Asimismo , P12está localizado en el punto de contacto por rodadura. Es probable que se ubique lalocalizaciónde Pz" gracias al hecho de que es el centro de la rotación aparente entre los eslabones 2 y 4; si noes así, se puede localizar trazando rectas perpendiculares a las direcciones de las velocidadesaparentes en los dos vértices del eslabón 4. Una recta para el centro instantáneo ..5
se obtiene oh-Figura 3-22 Centros instantáneos de un mecanismo invertido de corredera y manivela.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 125/508
"gura 3·23 Ejemplo 3-6.VELOCIDAD 1095..2..servando la dirección de deslizamiento entre los eslabones 2 y 5; la otra provienede la recta que
une </PI2PIS. A partir de estos, se pueden encontrar todos los demás centros instantáneos medianteaplicaciones repetidas del teorema de los tres centros.Antes de concluir esta sección, es preciso destacar que en todos los ejemplosanteriores se encontraron las ubicaciones de todos los centros instantáneos sinnecesidad de especificar la velocidad real de operación del mecanismo. Esta es otraindicación de la linealidad de las ecuaciones que relacionan a las velocidades, comose señaló en la sección 3-8. Para cualquier mecanismo de un solo grado de libertad,las ubicaciones de todos los centros instantáneos están determinadas de maneraúnica por la geometria únicamente, y no dependen de la velocidad de operación .
3-13 ANÁLISIS DE LA VELOCIDAD USANDOCENTROS INSTANTÁNEOSLas propiedades de los centros instantáneos ofrecen también un método gráficosencillo para el análisis de velocidades de mecanismos con movimiento plano.Ejemplo 3-7 En la figura 3-240 se da por sentado que se conoce la velocidad angular lAl2 de lamanivela 2 y se desea encontrar las velocidades de B, D Y E en el instante especificado.SoLUCIÓN Considérese la recta defmida por los centros instantáneos P12, P14, Y P24 De acuerdocon el teorema de Kennedy-Aronhold, debe tratarse de una recta y se conoce comolínea de loscentros. Según su definición, P24 es común tanto al eslabón 2 como al 4, Y posee las mis
masvelocidades absolutas en cada uno d e ellos.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 126/508
110 TEORÍA DE MÁQUINAS Y MECANISMOSII I {I III IIV P24/I 'I VA'
II I I(b)Figura 3-24 Determinación gráfica de la velocidad aplicando el método de los centros instantáneos.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 127/508
VELOCIDAD 111Figura 3-24 (Continuación)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 128/508
112 TEORLA DE MÁQUINAS Y MECANISMOSEn primer lugar, considérese el centro instantáneo P24 como un punto del eslabón 2. Se puede hallar la velocidad V A partiendo de (J);!, u sando la eruación de diferencia de velocidades entorno a P12, y es posible encontrar la velocidad de P24 partiendo de ella; la co
nstrucción gráfica semuestra en la figura 3-24b .Cuando el punto A' del eslabón 2 se localiza sobre la linea de los centros a una distancia igualdesde Pll, su velocidad absoluta V A' tiene la misma magnitud que VA' Ahora bien, se puedehallar t la magnitud de VI',. trazando una recta a partir de PI2 , que pase porla punta de V A'como se indica.A continuación considérese a P24 como un punto del eslabón 4 que gira alrededor de P14.COnociendo V p",. se puede encontrar la velocidad de cualquier otro punto del es
labón 4, comopor ejemplo R' o E' (Fig. 3-24c), aplicando la construcción inversa. Puesto que R'y E' se escogieronde tal modo que tengan los mismos radios que R y E, desde PI4 sus velocidades poseenmagnitudes iguales a las de V B Y V E, respectivamente, y éstas se pueden disponercon sus direccionesapropiadas como se muestra en la figura 3-24c.Para obtener VD se observa que D está en el eslabón 3; la velocidad conocida (J);! (o V A)corresponde al eslabón 2 y el eslabón de referencia es el ! . Por lo tanto, se escoge una nueva lineade los centros PI2P13P23 , como se muestra en la figura 3-24b. Si se usa (,)2 y
P12, se encuentra lavelocidad absoluta del centro instantáneo común PZ3 En este caso, este paso es trivial en vista deque V Pn = VA' Al localizar el punto D' sobre la nueva linea de los centros, seencuentra VD comose indica, y su magnitud sirve para hallar la velocidad deseada V l> Se observaque, según ladefinición, el centro instantáneo PIl , como parte del eslabón 3, tiene velocidad ceroen este instante.Dado que también se puede considerar B como punto del eslabón 3, su velocidad se calculaen forma similar determinando V B' , como se muestra.
El método de la línea de los centros del análisis de velocidad usando centrosinstantáneos se resume corno sigue:1 . Se identifican los tres números de eslabón asociados con la velocidad dada y laque se va a determinar. El eslabón 1 es casi siempre uno de ellos, en vista deque casi siempre se da y se pide información sobre la velocidad absoluta.2·. Se localizan los tres centros instantáneos definidos por los eslabones del paso1y se traza la línea de los centros.3 . Se encuentra la velocidad del centro instantáneo común, tratándolo corno unpunto del eslabón cuya velocidad se da.4. Una vez que se conoce la velocidad del centro instantáneo común, se le consideracorno un punto del eslabón cuya velocidad se va a determinar. Ahora esfactible encontrar la velocidad de cualquier punto en ese eslabón.
Otro ejemplo ilustrará el procedimiento y mostrará cómo tratar los centros instantáneosubicados en el infinito.Ejemplo 3-8 En el caso del dispositivo que aparece en la figura 3-25, s610 se pu

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 129/508
eden ver algunosde los eslabones y los otros quedan dentro de una cubierta; pero se sabe que elcentro instantáneoP25 tiene la ubicación indicada. Encuéntrese la velocidad angular de la manivela, (J);!, que se necesitapara p roducir una velocidad Ve de 10 mis hacia la derecha.SOLUCIÓN Puesto que se da Ve,11 y se desea CdUh es necesario usar los centros inst
antáneos P15 P12, Y P25 Después de localizar P25, P56, Y PI6 por simple observación y aplicar el teorema de lost Nótese que VI'" se pudo haber encontrado directamente, partiendo de su diferencia de velocidaden relación con P12 Se usó esta construcción para ilustrar el principio del método gráfi.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 130/508
, Línea de tos centros\, \, ,I--......., '\Y \ P25VELOCIDAD 113Cubierta cerradaFigura 3-25 Ejemplo 3-8.
5Ve Figura 3-26tres centros, se localiza P'S en el infinito, como se muestra. Ahora se traza lalínea de los centrosPI2P25P¡S.Si se considera a Pzs como parte del eslabón 5, se buscará determinar su velocidad apartir dela dada Ve. Se tiene cierta dificultad para localizar un punto C' de la línea de los centros con elmismo radio que e desde PIS , porque PIS está en el infinito. ¿Cómo se procede, entonces?Si se recuerda lo expuesto en la sección 3-12 y en la ecuación (3-24), se ve que, pu
esto que PISestá en el infinito, el movimiento relativo entre los eslabones 5 y 1 es una traslación Y(I)S!I = O.Dado que esto es cierto, todos los puntos del eslabón 5 tienen la misma velocidadabsoluta, incluyendoV 1'2, = Ve. De donde, se traza V I'¡j en la figura.A continuación, P25 se trata como un punto del eslabón 2, girando en tomo a P12 y seresuelvepara (1)2 . _.. 10 mIs .. - R 0 25 40 rad/s cmr Resp. I'¡jP" mAl observar la paradoja aparente entre las direcciones de Ve y .., se puede especular sobre lavalidez de la solución. No obstante, esto se resolvería abriendo la cubierta cerrada
y observandoel eslabonamiento que aparece en la figura 3-26.3-14 TEOREMA DE LA RAZON DE VELOCIDADES ANGULARESEn la figura 3-27, PZ4 es el centro instantáneo común a los eslabones 2 y 4 . Suvelocidad absoluta V P24 es la misma ya sea que P24 se considere como un punto del

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 131/508
114 TEORíA DE MÁQUINAS Y MECANISMOSFigura 3-27 Teorema de la razón de las velocidades angulares.eslabón 2, o bien, del 4. Considerándolo de cada manera, se puede escribirVP 24 = ..1O2 + roul x Rp24PI2 = ..1O4 + (U4/1 X Rp..14 (a)en donde (U2/1 y (U4!1 son iguales a (U2 y (U4, respectivamente; pero se ha escrito el
subíndice adicional para enfatizar en la presencia del tercer eslabón (el marco) .Considerando sólo las magnitudes, la (a) se puede reordenar para quedarW4/1 Rp24PUWZ/I= Rp24PI4 (b)Este sistema ilustra el teorema de la razón de velocidades angulares. El teoremaafirma que la razón de las velocidades angulares de dos cuerpos cualesquiera enmovimiento plano, en relación con un tercer cuerpo, es inversamente proporcionala los segmentos en los que el centro instantáneo común corta la línea de los centros.Escrito en notación general, para el movimiento de los cuerpos j y k, enrelación con el cuerpo i , la ecuación esWlc/í RPjkPij
Wj/¡= RpjkP;tc (3-25)Si se escoge una dirección positiva arbitraria, a lo largo de la línea de los centros,el lector debe probar por sí mismo que la razón de velocidades angulares espositiva cuando el centro instantáneo común queda fuera de los otros dos centros,y negativa cuando queda entre ellos.3-15 TEOREMA DE FREUDENSTEINEn el análisis y el diseño de eslabonamientos, con frecuencia resulta importanteconocer las fases del eslabonamiento en las que se presentan los valores extremosde la velocidad de salida, o bien, expresado de un modo más preciso, las fases enlas que la razón de las velocidades de salida y entrada alcanza sus valores extrem
os.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 132/508
VELOCIDAD 115, ;Figura 3-28 Mecanismo de eslabón de ..rrastre.Parece ser que el trabajo inicial para determinar los valores extremos fue elque realizara Krause, t quien afirmó que la razón de velocidades fUi W2 del mecanismo
de eslabón de arrastre (Fig. 3-28) alcanza un valor extremo cuando la biela y elseguidor, eslabones 3 y 4, quedan perpendiculares entre sí. Sin embargo, Rosenauer.ha demostrado que esto no es estrictamente cierto :t Siguiendo a Krause,Freudenstein desarrolló un metodo gráfico simple para determinar las fases deleslabonamiento de cuatro barras en las que se presentan los valores extremos delavelocidad.§t R. Krause, "Die DoppelkurbeI und Ihre Geschwindigkeitsgrenzen" MJ1sch..nenbauIGretiebetechnik:,vol. 1 8, pp. 37-4 1 , 1 939; Zur Synthese der Doppelkurber, MaschinenbauIGretiebete<;hnik, vol. 1 8,
pp. 93-94, 1939.t N. Rosenauer, "Synthesis of Drag-Link Mechanisms for ProduciDg Nonuniform RotationalMotion with Prescribed Reduction Ratio Limits, Aust. J. Appl. Sci., vol. 8, pp.1 -6, 1 957.§ F. Freudenstein, "On the Maximum and Mínimum Velocities and Accelerations iD Four-LinkMechanisms," Trans. ASME, vol. 78, pp. 779·787, 1 956.B\ I , ! /\ / /K Figura 3·29 Eje de coliDeación.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 133/508
116 TEORlA DE MÁQUINAS Y MECANISMOSEl teorema de Freudenstein utiliza la recta que conecta a los centros instantáneos Pu y PIl (Pig. 3 -29), denominada eje de colineación. El teorema expresaque en un extremo de la razón de la velocidad angular de salida a la de entrada de
un eslabomuníento de cuatro barras, el eje de colineación es perpendicular aleslabón acoplador. §Al aplicar d teorema de la razón de las velocidades angulares, ecuación(3-25), se escribe W4 -=-_R_ P ..;24_.;.P;;:.I2 _. _ W2 Rp24P12 + RpI2PI4Puesto que RPnPI4 es la longitud fija del eslabón de marco o referencia, los extremosde la raz6n de velocidades ocurren cuando Rp24Pl2 es un máximo, o bien, unmínimo. Estas posiciones pueden producirse en cualquiera de los dos o en amboslados de P12- Por ende, el problema se reduce a encontrar la geometría del eslabonamientopara la que Rp2..12 es un extremo.
Durante d movimiento del eslabonamiento, P24 se desplaza en la dirección dela recta PI2P ... según el teorema de los tres centros; pero en un valor extremo de larazón de velocidades, P24 debe estar instantáneamente en reposo (su dirección derecorrido sobre esta recta debe estar invirtiéndose). Esto ocurre cuando la velocidadde Pu. considerado como un punto del eslabón 3 , queda dirigida a lo largodel eslabón acoplador. Esto será cierto sólo cuando el eslabón acoplador sea perpendicularal eje de colíneación, puesto que P13 es el centro instantáneo deleslabón 3 .Una inversión del teorema (considerando al eslabón 2 como fijo) afirma queun valor extremo de la razón de velocidades W3/ W2 de un eslabonamiento de cuatro
barras 0CUI"Te cumulo el eje de colineación es perpendicular al seguidor (eslabón 4).3-16 INDICIlli DE MÉRITO; VENTAJA MECÁNICAEn esta sección se estudiarán algunas de las razones, ángulos y otros parámetros delos mecanismos que indican si un mecanismo en particular es eficiente o deficiente.Muchos autores han definido este tipo de parámetros en el curso de los afios y nohan podido lk;gar a un acuerdo respecto un solo "índice de mérito" para todos losmecanismos. No obstante, todos los que se han empleado poseen varias característicasen comÚll, incluyendo el hecho de que la mayor parte de ellos pueden relacionarsecon las razones de velocidades del mecanismo y, por ende , pueden determinarse
exclusivamente por la geometría del mismo. Además, la mayor partedependen de cierto conocimiento de la aplicación del mecanismo, sobre todo decuáles son los eslabones de entrada y salida. Con frecuencia resulta conveniente enel análisis o la síntesis del mecanismo, construir la gráfica de tales índices de mérito§ A. S. lIaJI. Jr. contribuyó con una demostración rigurosa de este teorema, en un apéndice a laponencia de Fn:udensteÍn.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 134/508
VELOCIDAD 117eFIgura 3-30 Eslabonamiento de cuatro barras.para una revolución de la manivela de entrada, y observar en particular sus valoresmínimo y máximo, al evaluar el diseiío del mecanismo o su adaptabilidad a una
aplicación en especial.En la sección 3-14 se explicó que la razón de la velocidad angular del eslabónde salida al de entrada de un mecanismo es inversamente proporcional a los segmentosen los que el centro instantáneo común corta la línea de los centros. Porconsiguiente, en el eslabonamiento de cuatro barras de la figura 3-30, si loseslabones 2 y 4 son los de entrada y salida, respectivamente, entoncesW4 RpAW2 = RpDes la ecuación para la razón de la velocidad de salida a la de entrada. En la sección3- 1 5 se explicó también que los extremos de esta razón ocurren cuando el eje decolineación es perpendicular al acoplador, el eslabón 3.
Si ahora se supone que el eslabonamiento de la figura 3-30 carece de fuerzas defricción o de inercia durante su funcionamiento, o que estas son despreciables encomparación con el momento de torsión de entrada T2, aplicado al eslabón 2, y elmomento de torsión de salida T4 el momento de carga resistiva sobre el eslabón 4,entonces se puede obtener una relación entre T2 y T4 Puesto que las fuerzas defricción e inercia son despreciables, la potencia de entrada aplicada al eslabón 2 es la negativa de la potencia aplicada al eslabón 4 por acción de la carga; por lotanto , (a)o bien, (3-26)La ventaja mecánica de un mecanismo es la razón instantánea de la fuerza(momento de torsión) de salida a la fuerza (momento de torsión) de entrada. Eneste caso se observa que la ventaja mecánica es el recíproco negativo de la razón develocidades. Cualquiera de las dos se puede utilizar como índice de mérito al j uzga
rla capacidad de un mecanismo para transmitir fuerza o potencia.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 135/508
113 TE0R1A DE MÁQUINAS Y MECANISMOSeFigura 3-31 Eslabonamiento de cuatrq barras ep posición de volquete.En la figura 3-31 se ha vuelto a trazar el esquema d$tl mecanismo en la posiciónen la que los 'eSlabOnes 2 y .. se encuentran sobre hi misma recta. En estaposición, RpA y W4 están pasando por cero; por ende, se obtiene un valor extremo
de la ventaja mecánica (infinito). Cuando un mecanismo se encuentra en esta fasese dice que está en volquete. ' A meftudo se emplean estas posiciones en volquetepara 'producir una gran ventaja'íneeánica;'oo ejemplo se tiene en'el mecanismo desujeción de la figura 2-6.Continuando,' seitrazan'B' A y C' D perpendÚ:ulares a la recta PBC de la figura3-30. Sean támbién p y y 'los 'ánguÍos agudos formados por el acoplador, o su extensión,'y los ángulos 'de s.Hida y" entrada, respcl!tivamente. Así pues, por triánguiossemejantes,;RpD 'RC'D ReD setÍyRpA = RB'A = RBA sen {3 (h)Luego, aplicando la (3-26) se ve que otra expresión para la ventaja mecánica es t
= _ (d2 = _ -:=Re-"D_"".sen_-,- 'YW4' RBA sen {3 . . (3-27)L a (3-27) muestra que l a ventaja m..cánica es ioiinita siempre que el ángulo {3 sea Oó ISO", es decir, siempre que el mecanismo esté en laJX)sición de volquete.En la sección 1 -9 se defi,nió el ángulo y comprendido entre el acoplados y eleslabón seguidor como el ángulo de transmi$ión. Este ángulo se utiliza tambiéncon frecuencia como índice de mérito para un eslabol)alniento de cuatro Qarras. LaecuacióJl (3-27) n;u,testra, que la ven..aja mecánica disminuye cuando el ángulo detransmisión es,mucho menor que un ángulo recto. $i -el ángulo de transm..sión ..ereduce en exceso, la ventaja mecánica se empequeñece e incluso una cantidad muypequeña de fricción hará que el mecanismo se trabe. Para evitar lo anterior, unaregla empírica común es que no se debe usar un eslabonamiento de cuatro barras
en una región en la que el ángulo de transmisión sea menor que, por ejemplo 45 Ó50° . El mejor eslabonamiento de cuatro barras, 'con base en la calidad de su fuerzade transmisión, tendrá un ángulo de transmisión con desviación mínima de 90°.En otros ..ecanismos, por ,ejemplo, dientes de engrane.. acoplados o si$temasde leva y seguidor, se usa el émgu/o de pr..ión como indice de mérito. El ántCompárese este resultado con la ecuaci ón (3-t9).
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 136/508
, .' VELOCIDAD (la9gulo de presión se define como el ángulo agudo comprendido entre 'la dirección dela fuerza de salida y la dirección de la velocidad del punto en el que se apJica lafuerza de salida. Los ángulos de presión se estudiarán'ton mayor minuciosidad enlos capitulos 6 y 7 . En el eslabonamiento de cuatro barras, el ángulo de presión es
el complemento del de transmisión.Otro índice de mérito que se ha propuesto :f: es el déterminante de los coeficientesde las ecuaciones simultáneas que relacionan a las velocidades dependientesde un mecanismo. Así, en el ejemplo 3-5 se vio que las velocidades dependientesde un eslabonamiento de cuatro barras están relacionadas p,..r medio de lasecuacionesRcB sen lhw3 ReD sen 84w4 ,=:= RYA sen 82W2El determinante de los coef"téienfes'ésComo lo incli.a d.. lDanera. obvia la regla de Cramer, las solucione..''P.ra l;¡ls ...e-:tlocidades ck:pendientes, en este caso, W3 Y W4, deben incluir este determinante
en eldenomi..adoi. Esto .se justifica.en l a solucióñ'del eslabonamiento de cuatro harras,ecl!aciones '(3-18) y (3-19). Aunque la forn.1a de este deterniinante cambia paradif.erentes.mecanism..s. siempre se puede definir uno de este tipo y siempre apareceen los denominadores de todas las soluciones de velocidades dependientes.Cuando este determinante se hace pequefio, la ventaja mecánica se reducetambié.. y la utilidad del mecanismo se reduce en tales regiones. Todavia no se ha v..sto, pero también es verdad que este mismo determinante aparece del mismomodo en el denominador de las acelerf!ciones dependientes y todas las demás cantid
adesque requieren que se tomen derivadas de la ecuación de cierre del circuito.Si este determinante es pequefio el mecanismo funcionará con deficiencia en todoslos aspectos -fuerza de transmisión, transformación del movimiento, sensibilidada errores de fabricación. etc.3-17 CEN1RODASEn la sección 3-10 se hizo notar que la ubicación del centro instantáneo de velocidadestaba definido sólo instantáneamente, y que cambiaria conforme el mecanismose moviera. Si se encuentran las ubicaciones de los centros instantáneospara todas las fases posibles del mecanismo, se verá que describen curvas o lugaresU. Denavit y otros, "Velocity, Acceleration, and Static Force Analysis of Spatia
l Linkages, " J.AppJ. Mech., A SME TraM., voL 87, series E, no. 4, pp. 903-910, 1965.
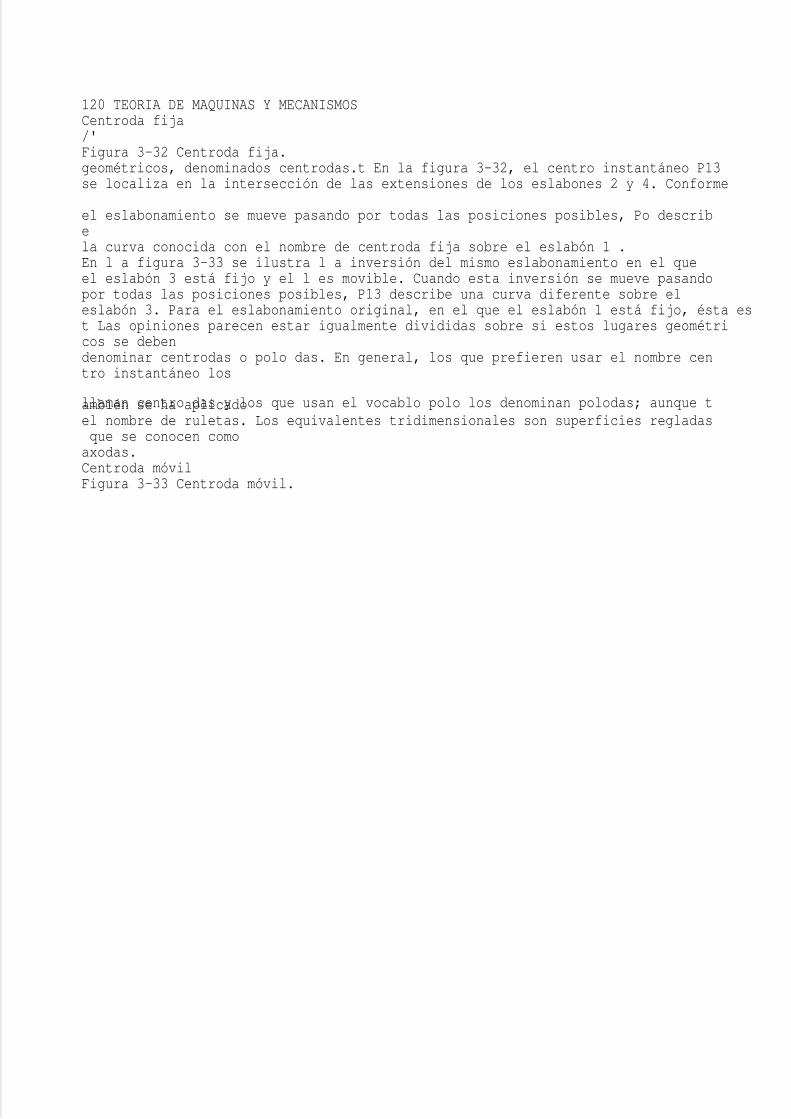
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 137/508
120 TEORIA DE MAQUINAS Y MECANISMOSCentroda fija/'Figura 3-32 Centroda fija.geométricos, denominados centrodas.t En la figura 3-32, el centro instantáneo P13se localiza en la intersección de las extensiones de los eslabones 2 y 4. Conforme
el eslabonamiento se mueve pasando por todas las posiciones posibles, Po describela curva conocida con el nombre de centroda fija sobre el eslabón 1 .En l a figura 3-33 se ilustra l a inversión del mismo eslabonamiento en el queel eslabón 3 está fijo y el l es movible. Cuando esta inversión se mueve pasandopor todas las posiciones posibles, P13 describe una curva diferente sobre eleslabón 3. Para el eslabonamiento original, en el que el eslabón 1 está fijo, ésta est Las opiniones parecen estar igualmente divididas sobre si estos lugares geométricos se debendenominar centrodas o polo das. En general, los que prefieren usar el nombre centro instantáneo los
llaman centro das y los que usan el vocablo polo los denominan polodas; aunque también se ha aplicadoel nombre de ruletas. Los equivalentes tridimensionales son superficies regladasque se conocen comoaxodas.Centroda móvilFigura 3-33 Centroda móvil.
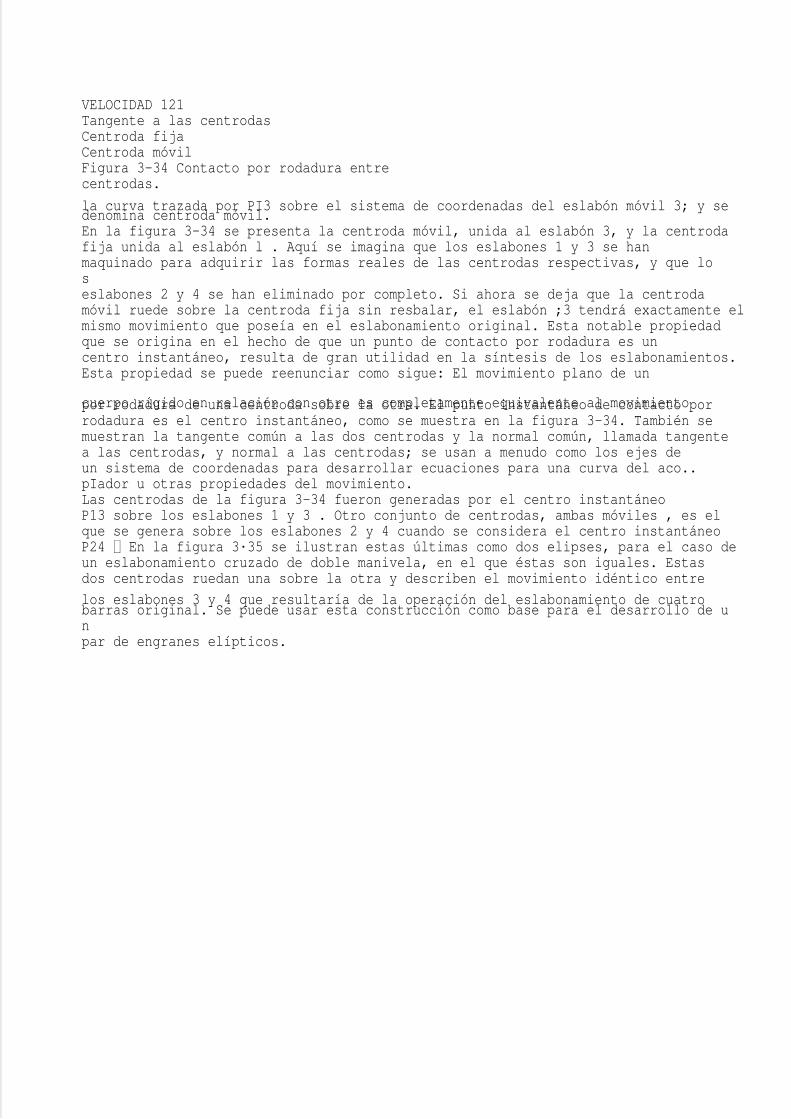
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 138/508
VELOCIDAD 121Tangente a las centrodasCentroda fijaCentroda móvilFigura 3-34 Contacto por rodadura entrecentrodas.
la curva trazada por PI3 sobre el sistema de coordenadas del eslabón móvil 3; y sedenomina centroda móvil.En la figura 3-34 se presenta la centroda móvil, unida al eslabón 3, y la centrodafija unida al eslabón l . Aquí se imagina que los eslabones 1 y 3 se hanmaquinado para adquirir las formas reales de las centrodas respectivas, y que loseslabones 2 y 4 se han eliminado por completo. Si ahora se deja que la centrodamóvil ruede sobre la centroda fija sin resbalar, el eslabón ;3 tendrá exactamente elmismo movimiento que poseía en el eslabonamiento original. Esta notable propiedadque se origina en el hecho de que un punto de contacto por rodadura es uncentro instantáneo, resulta de gran utilidad en la síntesis de los eslabonamientos.Esta propiedad se puede reenunciar como sigue: El movimiento plano de un
cuerpo rígido en relación con otro es completamente equivalente al movimientopor rodadura de una centroda sobre la otra. El punto instantáneo de contacto porrodadura es el centro instantáneo, como se muestra en la figura 3-34. También semuestran la tangente común a las dos centrodas y la normal común, llamada tangentea las centrodas, y normal a las centrodas; se usan a menudo como los ejes deun sistema de coordenadas para desarrollar ecuaciones para una curva del aco..pIador u otras propiedades del movimiento.Las centrodas de la figura 3-34 fueron generadas por el centro instantáneoP13 sobre los eslabones 1 y 3 . Otro conjunto de centrodas, ambas móviles , es elque se genera sobre los eslabones 2 y 4 cuando se considera el centro instantáneoP24 En la figura 3·35 se ilustran estas últimas como dos elipses, para el caso deun eslabonamiento cruzado de doble manivela, en el que éstas son iguales. Estasdos centrodas ruedan una sobre la otra y describen el movimiento idéntico entre
los eslabones 3 y 4 que resultaría de la operación del eslabonamiento de cuatrobarras original. Se puede usar esta construcción como base para el desarrollo de unpar de engranes elípticos.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 139/508
m TEORlA DE MÁQUINAS y MECANISMOSFigura 3-35PROBLEMAst3-1 El vector de posición de un punto está dado por la ecuación R IOOe'''', en donde Rse da en pulgadas.Encuéntrese la velocidad del punto cuando t = 0.40 s .
3-2 L a ecuación R = (t2 + 4)e-''',110 define la trayectoria de una partícula. Si Rse da en metros, deter..mínese la velocidad de la partícula en t = 20 s.3-3 Si ,el automóvil A se desplaza hacia el sur a 5 5 millaslh y el automóvil ·B a 40millas con una direcciónque forma un ángulo ¡le 60° con la norte, hacia al este, ¿cuál es la diferencia de velocidad entre B yA? ¿Cuál es la velocidad a..arente de B para el conductor del A ?3-4 E n la figura, la rueda 2\ira a 600 rpm e impulsa a la rueda 3 sin resbalar.Encuéntrese la diferenciade velocidad entre los puntos B y A .3-5 Dos puntos, A y B, localizados a lo largo del radio de una rueda (véase la fig
ura), tienen una magnitudde la velocidad de 80 y 140 mih, respectivamente. La distancia entre los puntoses RBA = 300 mm.a) ¿Cuál es el diámetro de la rueda?b) Encuéntrese V AB, V BA Y la velocidad angular de la rueda.t AÍ asignar los problemas , quizá el maestro desee especificar el método de resoluciónque debeutilizarse, en vista de la variedad de planteamientos presentados en el texto.Problemas 3-4 Y 3-5
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 140/508
B f Trayectoria de! avión B\ 1 )0 , 200\ . milla.. \VI Trayectoria del avión A ¡ 60: .. 450A 'Problemas 3-6 y 3-8 R4B = 400 mm.A{ / /'
--;1:.. .. A \VELOCIDAD 123'---j.----xProblema 3-9 RAo, = 4 pulg, RBA\= 10 pulg, Ro.o, 1 0 pulg, RBO = 12 pulg.Problema 3-10 RAo, 150 mm, RYA = 300 mm, Ro.o, 75 mm, RBO = 300 mm,ROA 150 mm, ReD = 100 mm.3-6 Un avión sale del punto B y vuela hacia el este a 3 50 millas/h. Simultáneamente, en el punto A, a200 millas al sureste (véase la figura), otro avión despega y vuela al noreste a 390millas/h.a) ¿A qué distancia se acercarán los aviones uno del otro si vuelan a la misma altitud
?b) Si ambos despegan a las 6:00 p.m., ¿a qué hora ocurrirá esto?3-7 A los datos del problema 3-6, agréguese un viento de 30 millas/h proveniente del oeste.a) Si A vuela con el mismo rumbo, ¿cuál es su nueva trayectoria?b) ¿Qué cambio produce el viento en los resultados del problema 3-613-8 La velocidad del p unto B del eslabonamiento ilustrado en la figura es de 40mis. Determinese lavelocidad del p unto A y la velocidad angular del eslabón 3.3-9 El mecanismo que aparece en l a figura e s impulsado por e l eslabón 2 a bl:!= 4 5 rad/s emr. Encuéntrenselas velocidades angulares de los eslabones 3 y 4.3-10 La manivela 2 del mecanismo de eslabón de empuje ilustrado en la figura corre
spondiente, es impulsadoa bl:! 60 rad/s mmI. Determinense las velocidades de los puntos B y e y las velocidades angularesde los eslabones 3 y 4.3-11 Calcúlese la velocidad del punto e sobre el eslabón 4 del mecanismo que se muestra en la figura, sila manivela 2 es impulsada a ro, = 48 radls cce. ¿Cuál es la velocidad angular del eslabón 31

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 141/508
124 TEORíA DE MÁQUINAS Y MECANISMOS3-12 La figura muestra un eslabonamiento de barras paralelas en el que los eslabones opuestos tienenlongitudes iguales. Para este eslabonamiento, demuéstrese que (1)) es siempre ceroy que(l)4 (1)2' ¡'Cómodescribirla el movimiento del eslabón 4 en relación con el 21
e----xProblema3-11 RAo, = 8pulg,.RBA = 32pulg, Ro,o, = 16pulg, RBo. = 16pulg, Reo. = 12pulg. Problema3-123-13 La figura ilustra el eslabonamiento antiparalelo o de barras cruzadas. Si el eslabón 2 es impulsadoa (1)2 ':' 1 rad/s cmr, determi..as velocidades de los puntos e y D.3-14 Encuéntrese la velocidad del punto e del eslabonamiento ilustrado en la figura correspondiente,suponiendo que el eslabón 2 posee una velocidad angular de 60 radls crnr. Hállense también las velocidadesangulares de los eslabones 3 y 4.
Problema 3-13 RAo,3-14 RAo, RBARBO, 300 mm, RBA = Ro.o, 150 mm, ReA6 pulg, Ro.o, = RBO, 10 pulg, ReA = pulg.--xRDB = 75 mm. Problema3-15 La inversión del mecanismo de corredera-manivela mostrado en la figura impulsa el eslabón 2 a(1)2 60 rad/s cmr. Determínese la velocidad del punto B y las velocidades angulares de los eslabones3 y 4.3-16 Encuéntrese la velocidad del punto e del acoplador y las velocidades angulares de los eslabones 3 y
4 del mecanismo ilustrado, si la manivela 2 posee una velocidad angular de 30 radls mmr .

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 142/508
VELOCIDAD 125Problema 3-15 RAo, = 75 mm, RBA = 400 mm, Ro.o, = 125 mm. Problema 3-16 RAo, = 3pulg, RBA = ReB = 5 pulg, Ra.o, = 10 pulg, RBO, = 6 pulg.3-17 El eslabón 2 del eslabonamiento ilustrado en la figura correspondiente poseeuna velocidad angularde 10 rad/s crnr. Determínese la velocidad angular del eslabón 6 y también las velocid
ades de los puntos B, C y D.3-18 La velocidad angular del eslabón 2 del mecanismo de eslabón de arrastre que semuestra en lafigura es de 16 rad/s mmr. Constrúyase un diagrama polar de velocidades para la velocidad del punto B, para todas las posiciones de la manivela. Compruébense las posiciones de las velocidades máxima ymínima, aplicando el teorema de Freudenstein..---;;----\BProblema 3-17 RAo, = 2.5 pulg, RBA = 10 pulg, ReB = 8 pulg, RCA Roc = 4 pulg, Ro"o, = 8pulg, RlJOr, = 6 pulg. Problema 3-18 RAo, = 350 mm, RBA = 425 mm, Ro,o, = lOO mm, RBO, =
400 mm.3-19 El eslabón 2 del mecanismo ilustrado en la figura es impulsado a 11)2 = 36 rad/s mmr. Cálculese lavelocidad angular del eslabón 3 y la velocidad del punto B.3-20 Calcúlese la velocidad del punto C y la velocidad angular del eslabón 3 del mecanismo de eslabónde empuje ilustrado en la figura. El eslabón 2 es el impulsor y gira a 8 rad/s emr.3-21 El eslabón 2 del mecanismo que aparece en la figura correspondiente posee unavelocidad angularde 56 rad/s cmr. Determínese V c.3-22 Encuéntrense las velocidades de los puntos B, C y D del mecanismo de doble corredera presentado
en la figura, si la manivela 2 gira a 42 rad/s cmr.3-23 La figura presenta el mecanismo usado en un motor en V de 60° de dos cilindros, compuesto enparte de una biela articulada. La manivela 2 gira a 2 000 rpm mmr. Determínense las velocidades delos puntos B, C y D.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 143/508
126 'TEORIA DE MÁOUINAS y MECANISMOSProblema 3-19 RAo, 5 pulg, RBA = RBo.. 8' pulg, Ro.. o,. = 7 pulg, Problema 3-20RAa: 150mm, ReA Reo. = 250 mm, Ra,o, = 75 mm, ReA = 300 mm, ReB = 100 mm.Be
Problema 3-21 RAo, = Ree 150 mm; RBA RBo. = 250 mm, Ro.o, 100 mm, ReA 300 mm. Problema3-22 R"o, 2 pulg, RBA = 10 pulg, ReA = 4 pulg, ReB = 7 pulg, Roc = 8 pulg.Problema 3-23 R"o, = 2 pulg, Re" = ReB 6 pulg. ReA= 2 pulg, Roc 5 pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 144/508
, . VE1.00lDAD 1273-24 Formúlese un análisis completo de velocidad para el eslabonamiento ilustrado enla figura correspondiente,Uado que .. = 24 rad/s. mmr. ¿Cuál es la velocidad absoluta del punto B1 ¿Cuál es su velocidadpara un observador que se 4f;:splaza junto con el eslabón 41
. .... , I3-25 Determinese V B-para.el eslabonamiento presentado en la figura correspondiente si VA .. 'tpie/s.3-26 La figura-de este problema ilustra una variación del mecanismo de yugo escocés.Este mecanismoes impulsado por la manivela 2 a .." 36 rad/s emr. Calcúlese la velocidad de la cruceta, eslabón 4.3-27 Hágase un análisis completo de velocidad del eslabonamiento ilustrado en la figurá: corresPondiente,para (0)2 " 72rad/s crnr.A-'---.-x
Problema 3-24 RAo, ' = 8pulg, Ro.hz20 pulg.Problema 3-25Problema 3-26 RAo¡ = 250 mm. Problema 3-27 RAo, = Roc = 1.5 pulg, RBA = 10.5 pulg,Ro.o¡ =6 pulg, RBo. 5 pulg, Ro"o, = 7 pulg, RE.. = 8 pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 145/508
US' 1EORIA DE MÁQUINAS Y MECANISMOS----2 r---.Problema 3-28 Las dimensiones se dan en milimetros. Problema 3-293-28 Los eslabones ranurados 2 y 3 son impulsados en forma independiente a f»2 = 30 rad/s rnmr y (0)3= 20 rad/s mmr, respectivamente. Calcúlese la velocidad absoluta del centro del pa
sador P4 que va dentrode las dos ranuras.3-29 El mecanismo ilustrado se impulsa de tal manera que Ve = 10 pulg/s hacia laderecha. Se suponeque existe un contacto por rodadura entre los eslabones 1 y 2; pero que puede haber deslizamiento entrelos eslabones 2 y 3 . Determínese la velocidad angular del eslabón 3.3.30 La leva circular ilustrada se impulsa a una velocidad angular de f»2 = 1.5 rad/s mmr. Existe un contactopor rodadura entre la leva y el rodillo, eslabón 3. Calcúlese la velocidad angular del seguidor oscilante,eslabón 4.
3-31 El mecanismo ilustrado en la figura es impulsado por el eslabón 2 a 10 rad/scmr. Se tiene un contactopor rodadura en el punto F. Determinese la velocidad de los puntos E y G, Y lasvelocidades an-,.. guiares de los eslabones, 3, 4, .5 Y 6.3-32 La figura presenta el diagrama esquemático de una bomba de dos émbolos. La bomba es impulsadapor un excéntrico circular, eslabón 2, a f»2 = 2.5 rad/s cmr. Calcúlense las velocidadesde los dospistones, eslabones 6 y 7.Problemas 3-30 Y 3-31

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 146/508
VELotIDAD 129Problema 3-32Problema 3-33(3-33 El tren de engranes epicíclico que se muestra en la figura correspondiente esimpulsado por el
brazo, eslabón 2, a 6»2 = 10 rad/s mmr. Deterrnlnese la velocidad angular del eje desalida que va conectadoal engrane 3 .3-34 E l diagrama muestra una aproximación esquemática plana d e una suspensión delantera d e automóvil.El centro del rodillo es el término utilizado por la industria para describir el punto en torno alcual parece girar el cuerpo del automóvil, en relación con el piso. Se supone que hay pivoteo, pero noresbalamiento entre las ruedas y la carretera. Después de hacer un esquema, aplíquense los conceptos delos centros Instantáneos para encontrar una técnica que sirva para localizar el cent
ro del rodillo.3-35 Localícense todos los centros instantáneos del eslabonamiento del problema 3-22 .3-36 Determlnense todos los centros instantáneos del mecanismo del problema 3-25. 3-37 Encuéntrense todos los centros instantáneos del mecanismo del problema 3-26.3-38 Localicense todos los centros instantáneos del mecanismo del problema 3-27.3-39 Encuéntrense todos los centros instantáneos del mecanismo del problema 3-29.3-40 Hállense todos los centros instantáneos del mecanismo del problema 3-30.Problema 3-34

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 147/508
CAPÍTULOCUATROACELERACIÓN4-1 DEFINICIÓN DE ACELERACIÓNEn la figura 4-1a se observa primero un punto móvil en la ubicación Pen dondetiene una velocidad V p. Después de un breve intervalo de tiempo !:it, se observa
que el punto se ha desplazado siguiendo cierta trayectoria hasta la nueva ubicaciónP', y que su velocidad ha cambiado a Vp, que puede diferir de V p tanto enmagnitud como en dirección. Se puede evaluar el cambio de velocidad 4 V p: comose indica en la figura 4-lb.La aceleraci.ón promedio del punto P durante el intervalo es AV PI !:it.La aceleración instantánea (de aqui en adelante llamada, sencillamente. aceleración)del punto P se define como la rapidez de cambio de su velocidad respectoal tiempo, es decir, el limite de la aceleración promedio para un intervalo detiempo infinitesimal mente pequeñoAp = lim4Vp
=dVp At->o!:it dt =..dt (4-1)Puesto que la velocidad es una cantidad vectorial, ..1V p y la aceleración Aptambién son cantidades vectoriales y ambas tieneIJ, magnitud y dirección, Asimismo,al igual que la velocidad, el vecfor aceleración se define apropiadamente sólopara un punto; el término no se debe aplicar a una recta, un sistema de coordenadas,un volumen o cualquier otra colección de puntos ya que las aceleraciones delos diversos puntos que intervengan pueden diferir,

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 148/508
zy'......----Trayectoria del punto P'\'\ Vp'\\ \\ \I I
P'I ____ ..VpO.---------------------------x(alFigura 4-1 Cambio en la velocidad de un punto en movimiento,ACELERACIÓN 131°vlb)Al igual que la velocidad, la aceleración de un punto en movimiento será considerada en forma diferente por observadores diferentes. La aceleración no depende
de la ubicación real del observador, sino que depende críticamente del movimientode éste o, mas bien, del movimiento del sistema de coordenadas de talobservador. Si la aceleración es detectada por un observador situado en el sistema absoluto de coordenadas se le menciona como aceleración absoluta y se denotamediante el símbolo Ap/1 o simplemente Ap, lo cual es coherente con la notaciónutilizada para la posición, el desplazamiento y la velocidad.4-2 ACELERACIÓN ANGULAR DE UN CUERPO RíGmOEn la figura 4-2 se considera el movimiento de un cuerpo rígido. Dos puntos delcuerpo, P y Q, sufren primero desplazamientos pequefios durante un intervalobreve de tiempo, &t, y llegan a las nuevas posiciones xxi y Q'. A continuación,durante otro pequefto intervalo de tiempo, cubren otros pequefios desplazamientos
para llegar a las posiciones P" y Q". Se recordará (Sec. 3-3) que estos desplazamientossirvieron para obtener el vector diferencia de velocidad V PQ Y paradefinir el vector velocidad angular .. del cuerpo en movimiento. Al hacerlo setomó el punto de vista de un observador en un sistema de coordenadas en movimiento cuyo origen se desplaza junto con el punto Q, pero cuyos ejes se mantienenparalelos a los de los ejes de coordenadas absolutas. Se recordará asimismoque un observador de esta indole percibe sólo la rotación del cuerpo en tomo al

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 149/508
132 TEOR1A DE MÁQUINAS Y MECANISMOSFigura 4-1(alFigura 4-3(b) Qpunto Q y, como se mostró en la figura 3-4, a él le parece que el vector de diferenc
iade posición RPQ describe un cono cuyo eje define la dirección de w.Al desarrollar las fórmulas para la aceleración, ahora se desea extender estepunto de vista para dos intervalos de tiempo sucesivos. En la figura 4-30 se toma laperspectiva del mismo observador en movimiento, pero sin rotación. Durante elprimer intervalo de tiempo, el cuerpo gira en torno a Q hasta que P llega a P',conRpQ describiendo una sección de cono en torno al eje w. Durante el segundo inter-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 150/508
ACELERACIÓN 133valo, la rotación continúa hasta que P' llega a P". Sin embargo, en esta ocasión,la rotación puede tener un tamafto diferente y realizarse en torno a un eje diferente;de donde, se muestra RÍ>Q describiendo un segundo cono con el eje modificadoro', El cambio en la velocidad angular del cuerpo está dado por
La aceleración angular del cuerpo se define como la rapidez de cambio de suvelocidad angular, y su símbolo es a ,4ro dro a !..Tt= dt (4-2)Como se ve en la figura 4-3a, el cambio en la velocidad angular puede incluir un cambio en la magnitud (si la rapidez de la rotación aumenta o decrece) Y. o bien,un cambio en la dirección (si se modifica el eje de la rotación). Al igual que 4(1), del cual proviene, no existe razón alguna para creer que a posea una dirección alo largo de ro o bien, ro'; sino que puede tener una dirección totalmente nueva.Como el vector velocidad angular ro, el vector aceleración angular a seaplica a la rotación absoluta del cuerpo rígido completo, y con frecuencia se le
asigna un subindice del número del sistema de coordenadas del cuerpo en movimiento,por ejemplo, a2 o a2/1.4-3 DIFERENCIA DE ACELERACIONES ENTRE PUNTOSDE UN CUERPO RÍGIDOSiguiendo con la figura 4-3a, se puede escribir la ecuación de diferencia de velocidadque proviene de cada uno de los desplazamientos sucesivosyv po V P - V Q = ro x RpoVpo = Vp - Vó = ro' x Rpo(a)(b)
Los dos vectores de diferencia de velocidad se muestran tangentes a los conos respectivosen Py P'.Al restar la ecuación (a) de la (b), se obtiene4VPQ=VÍ>Q-VpQ (e)=4Vp 4VQ (d)En la figura 4-3b se muestra la sustracción gráfica de la (e) como su frontera exterior.Se observará que Vpo y V PQ tienen una diferencia de dirección en D.O yaque, según las ecuaciones (b) y (a), son perpendiculares a los radios del cono rÍ>QyrPO> respectivamente. Las magnitudes VÍ>Q y VPQ no son necesariamente iguales.
Para contribuir a la evaluación de 4 V PO> a continuación se divide en dos componentes,4 Vn, tomada como la cuerda de un arco circular con centro en Q yradio V PQ, Y 4 VI, tomada a lo largo de VPQ"

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 151/508
134 TEORÍA DE MÁQUINAS Y MECANISMOS4. V PQ = 4. Vn + 4. ViEn breve se descubrirá el significado de los superindices.(e)Si por ahora este estudio se concentra tan sólo en 4. vn , se puede evaluar sumagnitud trazando su mediatriz que pasa por Q. Así pues,
!:l vn = 2VpQ sen!:lTfJSi se supone que el intervalo de tiempo !:lt (y, por lo tanto, el desplazamientoangular)es pequeño, el seno del ángulo pequeño se puede aproximar por el ángulomismoAhora se puede dividir entre !:lt y tomar el límite, definiendo así lo que se conoce con el nombre de componente normal de la diferencia de aceleración. A esta expresión se le asocia el símbolo Ai'>oAnP Q= I,lm!:l.. vn = lím (!:lA tfJ V ) át....o I..lt át-íl I..l PQSi se aplica la definición de velocidad angular, esto se convierte en
A1>Q = wVpQAsimismo, en la figura 4-3b se observa que, en el límite, la cuerda 4. vn queda perpendiculara V PQ> Por consiguiente, se pueden restaurar los atributos véctoriales ala ecuación, escribiendoA1>Q = ú> X V PQRecordando la ecuación (3-3) correspondiente al vector de diferencia de velocidad, esto se puede escribir en la forma(4-3)Si el cuerpo que contiene a los dos puntos P y Q tiene un movimiento plano, sepueden encontrar otras formas útiles a partir de las ecuaciones (4-3) y (3-3) para
evaluar A1>QA1>Q = -w2RpQ (4-4)AnP Q-_ RV..pQQ (4-5)Ahora, el análisis se concentrará en 4. vt, el otro término de la ecuación (e).Puesto que 4. Vn es la cuerda de un arco circular, la magnitud de 4. Vt se puede evaluar como!:l VI VpQ VPQ Iú>' x RpQI-Iú> x RPQI = w'rÍ>Q -wrpQLuego se divide entre!:lt y se toma el limite, definiendo con ello a la componentetangencial de la diferencia de aceleración A..Q
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 152/508
ACELERACIÓN 135Al - lím Ll VI l' w'rEo - wrpQ _ l' (Llw ) PQ - 1m AlAt-o At-o .. - t.t1m-o -¡-.. t rpQSe observa que, en el limite, las direcciones de AVI, V PQ Y VEo se acercan a latangente
del cono en P. Por ende , es factible restaurar las propiedades vectoriales deesta ecuación como se indica a continuaciónA..Q = l.... (.7 x RpQ)o bien, recordando la (4-2),A..Q = a x RpQ (4-6)Ahora, después de haber examinado las componentes por separado, la (e) sedivide entre Llt, se toma el límite y se define el vector diferencia de aceleraciónentredos puntos P y Q de un cuerpo rigidoAP Q --lím AVPQ - dVPQ -A n + Al At-o Llt - dt - PQ PQ (4-7)Cuando se forma el mismo limite a partir de la (d), se obtiene la ecuación dela diferencia de aceleración
APQ Ap AQo bien, Ap = AQ +ApQ (4-8)Esta importante ecuación es una de las bases primarias para el análisis de aceleración,porque permite encontrar la aceleración de un punto P partiendo de la deQFigura 4-4
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 153/508
136 TEORÍA DE MÁQUINAS Y MECANISMOScualquier otro punto Q del mismo cuerpo rígido, y la diferencia de aceleración entre ambos. Según la ecuación (4-7), la diferencia de aceleración consta de dos componentes que pueden evaluarse a partir de las ecuaciones (4-3) y (4-6), si se conocen
las propiedades ro y (l del movimiento de rotación del cuerpo.En la figura 4-4 se ilustran las direcciones de las componentes de la diferencia de aceleración, y en donde se muestra una vez más el movimiento cónico que veríaun observador en un sistema de coordenadas que se traslada con el punto Q, por loque respecta a RpQ Ambas componentes quedan en el plano definido por la basedel cono. Los superíndices n y t se refieren a las componentes que son normales ytangentes al círculo de la base del cono. La componente normal A..Q siempre estádirigida hacia el centro de este círculo; la dirección de A..Q siempre es tangente a este círculo, pero su sentido depende del de (l.
Una vez más se hace hincapié en que (l y ro no tienen por lo común la mismadirección en el espacio tridimensional.La ecuación de la diferencia de aceleración se puede resolver por medios muysimilares a los que se emplearon en el capítulo 3 para la ecuación de la diferenciade velocidad.4-4 ANÁLISIS GRÁFICO DE LA ACELERACIÓN;POLÍGONOS DE ACELERACIONESComo en el análisis de velocidad, el enfoque gráfico proporciona un métodopoderoso y de fácil aplicación para analizar aceleraciones en mecanismos bidimensionales.Como primer ejemplo del análisis gráfico de la aceleración, considérese elmovimiento del eslabón no restringido que se ilustra en la figura 4-5a, con lasvelocidades que se muestran en el polígono de velocidades, figura 4-5b. Supóngase
que se da la aceleración de dos puntos, A y B, Y se desea determinar la aceleracióndel punto e y la aceleración angular del eslabón (se observará que esto es una continuaciónde la sección 3-4, figura 3-6). En general, resulta conveniente dibujar lafigura a escala y resolver para todas las velocidades importantes antes de dar principioal análisis de la aceleración propiamente dicho.A continuación, considérese la ecuación de la diferencia de aceleración (4-8),(a)En la figura 4-5c se muestra la solución l gráfica de esta ecuación para ABA. En suobtención es necesario elegir una escala para la representación gráfica de los vectores
aceleración; también se elige un punto de partida DA. Se representan gráficamentelos vectores AA y AB a la escala seleccionada, teniendo ambos su origenen DA y terminando en los puntos A y B, puesto que son aceleraciones absolutas.Según la ecuación (a), el vector que se extiende entre sus extremos ahora se identificacomo la diferencia de aceleración ABA y, dentro de la precisión gráfica, dauna representación correcta tanto de la magnitud como de la dirección.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 154/508
ACELERACIÓN 137A¡¡r;;..---..¡¡....(a) Ov.. A(b)(e)(fl
A AA(e)OAeB(g) FIgura 4-5La dirección de RBA se conoce a partir del diagrama del eslabón (Fig. 4-5a).Basándose en esta dirección, el vector ahora se divide en ABA en sus componentesnormal y tangencial(b)Estas aparecen ilustradas en la figura 4-5c y se repiten en el dibujo del eslabón,en
la figura 4-5d, en donde se pueden ver con mayor claridad sus direcciones.Se puede hallar la aceleración angular midiendo a escala la magnitud de lacomponente tangencial de la diferencia de aceleración y la distancia entre los pun-
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 155/508
138 TEORlA DE MÁQUINAS Y MECANISMOStos, y aplicando la (4-6). En el caso de un movimiento plano el vector « es perpendicularal plano del movimiento y su magnitud está dada por(e)Su sentido se puede determinar visualmente basándose en la figura 4-5d. Tomando
la perspectiva dcr un observador que no gira y se mueve con el punto A, la componentetangencial AkA se puede concebir como la rotación del eslabón en tomo alpunto A, en la dirección de «, en este caso, en el mismo sentido del movimientode las manecillas del reloj. Se observa que si se hubiera encontrado AAB en lugar deABA. el sentido de A..B habría sido opuesto al de AkA. No obstante, se concebiríacomo si indicara una rotación del eslabón en torno al punto B. Por consiguiente, elsentido de « habría resultado ser de todos modos el mismo que el del movimientode las manecillas del reloj.Ahora que se ha determinado « se está en posición de calcular la aceleraciónabsoluta del punto e, relacionándolo con los puntos A y B por medio de las
ecuaciones de la diferencia de aceleración00 vv vV ov" \Iv vV oVAc == AA + ACA+Ab AB + AcB+Ah (d)Dado que los puntos A, B Y e están en el mismo eslabón, las componentes normalesACA y ACB tienen cada unaJa forma-w2R [Ec. (4-4)]. En vista de que seconoce ro (o se encuentra partiendo de V BA), las dos magnitudes se pueden calcularutilizando RCA Y RcB respectivamente, y resultan ser iguales a w2R. Estos sesuman después gráficamente a AA y AB, como se ilustra en la figura 4-5e. Nóteseque el signo menos de la (4-4) significa que ACA es paralelo a RCA, pero de sentidoopuesto y, análogamente, para ACB y RcB. Continuando con la ecuación (d), ahoraes preciso sumar las componentes tangenciales Ab y Ah, las que, por lo que estip
ulala ecuación (4-6), son perpendiculares a RCA Y RcB, respectivamente. Estasdos rectas se tr..an como se indica en la figura 4-5e y se intersecan en el puntoidentificado por la letra e. La ecuación (d) revela que la aceleración absoluta delpunto e está dada por el vector que va de OA a e en el poligono de aceleraciones.En la figura 4-51 se presenta con la ubicación adecuada en el diagrama del eslabón.Según el método que se acaba de explicar, no se utilizó el valor previamentecalculado de « . Un método alterno habría sido usar « y la (4-6) para calcular yasea A..A o Ah. Sólo habría sido necesaria una de las dos ecuaciones (d) con estemétodo para localizar el punto e y determinar Ac.En la figura 4-5g se muestra el mismo poligono de aceleraciones con el triángulo
ABe sombreado y en el que se han suprimido las componentes normal y tangencialde la diferencia de aceleración. Se observa una vez más que el triánguloABe del polígono de aceleraciones tiene una forma semejante a la del eslabónoriginal ABe. Se puede demostrar que, en efecto, este es el caso, escribiendo lasecuaciones correspondientes a la magnitud de cada lado. Cada vector de diferenciade aceleración está constituido por una componente normal y una tangencial, y los
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 156/508
ACELERACIÓN 139tres forman un triángulo rectángulo como se observa en la figura 4-5e. Por lo tanto, aplicando el teorema de Pitágoras se encuentra, por ejemplo, la magnitud de ABA como sigue:Del mismo modo,
yRCAyw4+0:2RCBY w4+ 0:2(e)(j)(g)Por ende, se ve que los lados del triángulo ABC del polígono de aceleraciones sonproporcionales a los lados del eslabón original ABC, en donde el factor de proporcionalidaddepende del movimiento de rotación del eslabón. Esta figura de formasemejante a la del polígono de aceleraciones se conoce con el nombre de imagen deaceleraciones del eslabón, y cada eslabón en movimiento tiene una imagen de
aceleraciones correspondiente en el polígono de aceleraciones.Al igual que en el caso de la imagen de velocidades, se puede usar el conceptode imagen de aceleraciones para simplificar mucho la resolución del ejemplo anterior.Una vez que se han localizado los puntos A y B de la imagen de aceleracionesse puede construir el triángulo de la imagen de aceleraciones trazandoproporcionalmente los lados con los del eslabón, o construyendo los ángulos o: y {3, como se indica en la figura 4-5g. Nótese que cuando se aplica este método, se evitael cálculo de las dos componentes normales de la (d). Aunque el ángulo de rotaciónde la imagen de aceleraciones relativo al propio eslabón no es un valor que sedetermine con facilidad (depende de la magnitud de ro y tanto de la magnitudcomo de la dirección de a), las otras propiedades de la imagen de velocidades se
trasladan a las imágenes de aceleraciones:l . La imagen de aceleraciones de cada eslabón rígido es una reproducción a escalade la forma del eslabón en el polígono de aceleraciones.2. Las letras que identifican los vértices de cada eslabón son las mismas que setienen en el polígono de aceleraciones y se encuentran en tomo a la imagen deaceleraciones en el mismo orden y en la misma dirección angular que alrededordel eslabón.3. La razón del tamaño de la imagen de aceleraciones de un eslabón y el tamañodel propio eslabón depende del movimiento de rotación del eslabón. En general,no es la misma para los diferentes eslabones de un mecanismo.4. El punto 0,.. del polígono de aceleraciones es la imagen de todos los puntos que
tienen aceleración absoluta igual a cero. Se trata de la imagen de aceleracionesdel eslabón fijo.5. La aceleración absoluta en algún punto de cualquier eslabón se representapor medio de la recta que va de OA a la imagen del punto en el polígono deaceleraciones. La diferencia de aceleración entre dos puntos, póngase por casoP y Q, se representa mediante la recta que va del punto imagen P al puntoimagen Q.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 157/508
140 TEORíA DE MÁQUINAS Y MECANISMOSla)Xl/I An /I CDIIIlI", F
A'tCD' -_ Blb)Figlll'a 4-6 Análisis gráfico de aceleración de un eslabonamiento de cuatro barras, ejemplo 4-1: a)diagrama a escala y b) poligono de aceleraciones.Como se dijo en relación al análisis gráfico de la velocidad, se puede hacer usode la conveniencia del concepto de imagen de aceleraciones a fin de acelerar laresolución y reducir los cálculos numéricos. No obstante, se puede dar la impresiónde un truco gráfico sin base teórica firme; de donde, conviene seguir escribiendolas ecuaciones correspondientes de la diferencia de velocidad y la diferencia de aceleración siempre que se emplee el concepto de imagen, hasta haberse familiariza
doperfectamente con los principios fundamentales. A continuación sepresentarán dos ejemplos más para dar una mayor experiencia por lo que respectaal análisis gráfico de la aceleración.E;jempló 4-1 El eslabonamiento de cuatro barras ilustrado en la figura 4-00 se analizó en el ejemplo3-1, en lo referente a las velocidades; y su polígono de velocidades se dio en lafigura 3 -7b.Suponiendo que el eslabón 2 es impulsado con una velocidad angular constante, determinense lasaceleraciones absolutas de los puntos E y F, Y las aceleraciones angulares de los eslabones 3 y 4.SOLUCIÓN Partiendo del punto pivote fijo A, se principia por escribir la ecuación de
diferenciade aceleraciones para la aceleración del punto B.( 1)Las componentes de la ecuación de la diferencia de aceleración se calculan partiendodel movimientoangular especificado del eslabón 2,A.. W..RBA = (94.2rad/s)2(.. Pie ) = 2958 pie/s 2A ..A a2RBA (O rad/s2)( .. Pie ) = o·Se elige el punto 0,0. y una escala para las aceleraciones, y se traza A..A (condirección opuesta ala de RBA) , con el fin de localizar el punto B en la imagen de aceleraciones, como se consigna en
la figura 4-6b, resolviendo así la ecuación (1).

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 158/508
ACELERACIÓN 1 4 1A continuación se escriben las ecuaciones d e l a diferencia d e aceleración que relacionan alpunto C con los puntos B y D,(2)Con la información medida a escala en el poligono de velocidades, se calculan las
magnitudes delas dos componentes normales de la diferencia de aceleración,A..s Vh=ResA" _ V..DCD- ReD(38.4 pie/s)2 938 pie/s 218112 pie(45.5 pie/s)2 2268 11/12 pie/s 2 pieÉstas dos componentes normales tienen sentidos opuestos a Res y Reo. respectivamente. Comolo establece la ecuación (2), se agregan al polígono de aceleraciones partiendo de l
os puntos B yD, respectivamente, y se muestran mediante las líneas a trazos de la figura 4-6b.Luego se trazanrectas perpendiculares a trazos que pasen por los extremos de estas dos componentes normales;éstas representan la adición de las dos componentes tangenciales Af:.s Y Af:.D, comose requiere,completando así la ecuación (2). Su interseccÍón se identifica como el punto imagen e deaceleración.Ahora se encuentran las aceleraciones angulares de los eslabones 3 y 4 a partirde las doscomponentes tangenciales(\'J=-A::--s 11608/1 p2i e/s 2 107 radfs2 crnr Resp. Re8 pie
(\'4 AtDRCD= lt 2 pie= 1822 rad/s2 mmr Resp.en donde las direcciones se encuentran aplicando la técnica de simple observación ilustrada en elúltimo ejemplo, figura 4-5d.La aceleración absoluta del punto E se calcula ahora relacionándolo con los puntos By C.que están también en el eslabón 3, por medio de las ecuaciones de la diferencia de aceleración,(3)
Si así se desea, la resolución de estas ecuaciones puede seguir los mismos métodos empleados parala (2). Un segundo método es utilizar el valor de al, que ahora se conoce, con elpropósito de calcularuna o ambas componentes tangenciales. Sin embargo, es probable que el método más sencillosea construir el triángulo de las imágenes de aceleración BCE para la recta 3, utilizandocomo base a ACB Y la forma del eslabón 3. Cualquiera de estos métodos lleva a la localización delpunto imagen de aceleración E indicado en el polígono de aceleraciones, figura 4-6b.La aceleraciónabsoluta del punto E se mide entonces a escala y se encuentra que es
AIi = 1960 pie/s 2 Resp.Se puede aplicar también cualquiera de estos métodos para hallar la aceleración absoluta del

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 159/508
punto F. Las ecuaciones apropiadas de la diferencia de aceleración, que lo asociana los puntos ey D del eslabón 4, sonAF =AD +A'FD+A..= Ac+Ak+A..c (4)Su resolución conduce a la ubicación del punto imagen F, como se ilustra en el polígono deaceleraciones, y el resultado es
AF = 2 580 pie/s 2 Resp.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 160/508
142 TEORÍA DE MÁQUINAS Y MECANISMOSAl repasar este ejemplo, es evidente que la estrategia global para el análisisgráfico de la aceleración, el orden y el número de las ecuaciones escritas, sigueexactamente el sistema usado en el análisi¡¡ gráfico de la velocidad. Aunque haydos componentes en cada diferencia de aceleración y sólo una por cada diferenciade velocidad, las componentes normales se pueden calcular siempre basándose en
la información contenida en el polígono de velocidades; dicho de otra manera,nunca contienen una incógnita. Las incógnitas de la ecuación de la diferencia deaceleración surgen casi siempre de la magnitud desconocida de la componente tangencial,la cual depende de la aceleración angular de un eslabón, y la magnitud odirección desconocidas de una de las aceleraciones absolutas.Ji;jemplo 4-2 En el ejemplo 3-2 se hizo el análisis de velocidad de un mecanismo excéntrico decorredera y manivela. El polígono de velocidades se ilustró en la figura 3-8b. Suponiendo que lavelocidad dada de la corredera fuera constante, determínense la aceleración absolutainstantánea
del punto D y las aceleraciones angulares de los eslabones 2 y 3.SOLUCIÓN El diagrama a escala del mecanismo se ilustra una vez más en la figura 4-7a. Elpoligono de aceleraciones se inicia eligiendo una escala y el polo O A, como seve en la figura 4-7 b.Puesto que la velocidad Vese da como constante, su aceleración es cero y, por ende, el puntoimagen de aceleración e se identifica con OA.A continuación se escriben las ecuaciones de la diferencia de aceleración, para la aceleracióndel punto B, relacionándolo con dos puntos cuyas aceleraciones se conocen t , lospuntos e y A,AB = Yc0 + ABe + A..e ..O + ABA + A..A (5)
Se pueden calcular las magnitudes de las dos componentes normales a partir de lainformaciónobtenida del diagrama de posiciones y del polígono de velocidades,A" V..e (7.5 m/s) Be RBe O.1 4m m s( l0.0 m/S)2 = 2 000 I 20.05 mm sTi \unque se conocen l.. -puntos lIñagen -de aCeleraciSn'..de (; y-A; 'sería'un error iñexcusable !bbujar ... !lna -"imageñ de'!'aceleracioñe;¡'-dettnfuJ..Úl..ABC;..pof(i.e notodos estos-
puntos ;;tAn en el 'mismoeslabón.y,D(a)B(b)Figura 4-7 Análisis gráfico de aceleración correspondiente a un mecanismo excéntrico decorredera ymanivela, ejemplo 4-2 a) diagrama a escala (las dimensiones se dan en milimetros) aceleraciones.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 161/508
ACELERACIÚN 143Estas se trazan paralelas, pero con sentido opuesto a RBC Y KsA, respectivamente; y se suman aAc Y AA, como se muestra mediante las rectas a trazos de la figura 4-7b.Ahora se efectúa la adición de las componentes tangenciales de la (5), trazándolas perpendiculares
a KBC y KBA, respectivamente. Su intersección se identifica como el punto imagen deaceleración B.Dado que se conocen los puntos imagen B y C , se puede trazar la imagen de aceleracionesdel eslabón 3 para localizar el punto imagen D. Teniendo cuidado de que la imagenno se voltee,se ilustra sombreada en el polígono de aceleraciones. Abora se puede medir a escala la aceleraciónabsoluta del punto D, desde OA hasta el punto imagen D; y el resultado esAD 1300 m/5z Resp.Las aceleraciones angulares de los eslabones 2 y 3 se determinan partiendo de la
s dos componentestangenciales de la (5)A..A 1 260 m/52az = --= 25 200 rad/s2 mmr Resp. RBA 0.05 mA' 2300m/s2al = .. = 16400 rad/ S2 cmr Resp. RBc 0.14mNótese que a2 se encuentra en el mismo sentido que el movimiento de las manecillas del reloj, a pesar de que el movimiento de la corredera es hacia la izquierda. Este ejemplo debeser una advertencia suficiente para aquellos que se sientan inclinados a determinar por intuiciónlas direcciones de las aceleraciones; éstas no son fáciles de imaginar y se deben ob
tener a partir deprincipios básicos, en lugar de tratar de adivinarlas. En el ejemplo 3-2 se vio que Ilt)¡ tiene sentidoopuesto al del movimiento de las manecillas del reloj, como era de esperarse; elque a2 tenga unsentido igual al del movimiento de las manecillas del reloj revela que el eslabón2 se está desacelerandoen su movimiento de rotación.4-5 ACELERACIÓN APARENTE DE U N PUNTO ENUN SISTEMA DE COORDENADAS EN MOVIMIENTOEn la sección 3-5 se encontró que era necesario desarrollar la ecuación de la velocidad
aparente para situaciones en las que convenia describir la trayectoria por laFigura 4-8 Desplazamiento aparente.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 162/508
144 TEORíA DE MÁQUINAS Y MECANISMOSque se mueve un punto, en relación con otro eslabón móvil; pero que no conveníadescribir el movimiento absoluto del mismo punto. Investiguemos ahora la aceleraciónde un punto de esta naturaleza.Para hacer un repaso, en la figura 4-8 se ilustra un punto P3 se mueve siguiendo
una trayectoria conocida, la ranura, en relación con el marcode referencia móvil X2Y2Z2. El punto P2 con el P3 aceleraciones de los puntos P3 sea factible calcular (o medir) en un sistema mecánico típico.En la figura 4-9 se recuerda cómo percibiría esta misma situación un observadormóvil unido al eslabón 2 . Para él, la trayectoria de P3, la ranura, pareceríaestacionaria y le parecería que el punto P3 la velocidad aparente V P]/2.Se recordará que en la sección 3-5 se definió otro sistema de coordenadasmóviles ¡ni!, en donde p se definió como un vector unitario en la dirección delradio vector de curvatura de la trayectoria, T se definió como el vector unitariotangente a la trayectoria en P y i! era normal al plano que contiene a p y T, formandoasí un sistema derecho de coordenadas cartesianas. Después de definir s
como una distancia escalar de arco que mide el desplazamiento de P3 la trayectoria curva, se dedujo la ecuación (3-9) para la velocidad aparente(a)Considérese la rotación del radio vector de curvatura; barre cierto ángulopequeño 1l<fJ conforme P3 Trayectoria trazadapor P3 sobre --'el eslabón 2 '"Z2p)-:---_________ ....1 ---- x2 Figura 4-9 Desplazamiento aparente°2 del punto p] como lo ve un observadorsituado sobre el eslabón 2.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 163/508
ACELERACIÓN 145breve intervalo de tiempo At. El pequeño ángulo y la pequeña distancia estánrelacionados mediante la expresiónA<f> = AspSi esto se divide entre At y se toma el límite para un At infinitamente pequeño se
encuentra qued<f> _ 1 ds _ Vpy2(j¡-pdt---¡;- (b)Esta es la rapidez angular a la que parece girar el radio vector de curvatura p(ytambién T), tal como lo ve un observador móvil en el sistema de coordenadas 2,conforme el punto P3 se desplaza a lo largo de su trayectoria. Se puede dar a estarapidez de rotación sus propiedades vectoriales apropiadas como una velocidadangular aparente, observando que el eje de esta rotación es paralelo a v. Por consiguiente,se define
.. = .. v = V;Y2 V (c)A continuación se intenta hallar la derivada respecto al tiempo del vectorunitario T , de tal modo que se pueda derivar la ecuación (a). En vista de que T esun vector unitario, su longitud no cambia; no obstante, tiene una derivada debidoa su cambio de dirección, esto es, su rotación. En el sistema absoluto de coordenadas,i' está sujeto a la rotación c;, y también a la velocidad angular Q), con laque está girando el sistema de coordenadas móvil 2. Por,ende,Pero, cuando se usa la ecuación (e), esta expresión se convierte enAhora, si se toma la derivada respecto al tiempo de la (a), se encuentra quedVP3/2 d2s A ds di' ..s A ds A A ds Vpy2 A -¡¡¡- = dt2 '1'+ dt dt
=dt'i '1'+ dt Q)XT-dt--¡;- y, al aplicar la (a), esto se reduce adVpy2-¡¡¡-(d)(e)(j)Nótese que los tres términos de la ecuación anterior no se definen como lascomponentes de la aceleración aparente. Para ser coherente, el término aceleraci6n
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 164/508
146 TEORíA DE MÁQUINAS Y MECANISMOSaparente debe incluir sólo aquellas componentes que serian vistas por un observador!üo al sistema móvil de coordenadas. La ecuación anterior se deduce en elsistema absoluto de coordenadas e incluye el efecto de rotación de ro, que no seríadetectado por el observador móvil. No obstante, se puede encontrar con facilidad
la aceleración aparente, a la que se le da la notación Ap¡/2, igualando a cero a roen la (f). Esto da las dos componentes restantesen dondeApy2 = Apy2 + A..y2An _ P3/ 2----V}3/2 P.. P(4-9)(4-10)recibe el nombre de componente normal indicando que siempre es normal a latrayectoria y está dirigida hacia el centro de curvatura (la dirección -p ) . en tantoque(4-11)
se conoce como componente tangencial, indicando que siempre es tangente a latrayectoria (la dirección T ).A continuación se observa que el radio vector de curvatura p gira tanto acausa de ro como de ej.. Por ende, su derivada estAhora se puede escribir la ecuación de posición basándose en la figura 4-9,Rp) = Rc,+py con la ayuda de la (g), se puede tomar su derivada respecto al tiempo:!:(g)VP3 VC2+roxP+Vp¡/2 (h)Al derivar una vez más esta ecuación con respecto al tiempo, se obtieneAp¡ AC2 + el X P+ ro x .. dVp¡12 dt +---¡¡¡-y, con la ayuda de las ecuaciones (f) y (g), esto se convierte enAp3 = AC2 + el X p+ ro x (ro X p)+ Zro X V P)!2 - V;J/2 p+ .:.. T (i)
t Nótese que la magnitud de p se trata como constante en la cercanía del punto P, debido a sudefinición. En realidad, no es una constante, sino un valor estacionario; su segunda derivada es diferentede cero, pero la primera es cero en el instante considerado.:j: El primero de los dos términos de la ecuación (h) es igual a V p,; de donde, esequivalente a laecuación de la velocidad aparente. No obstante, nótese que aun cuando p = Rp,c" susderivadas no soniguales; y no giran a la misma velocidad. Por consiguiente, faltarían algunos de los términos de la siguienteecuación si, por el contrario, se derivara la ecuación de la velocidad aparente.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 165/508
ACELERACIÓN 147Los primeros tres términos de esta ecuación se reconocen como las componentesde Ap2 y los dos últimos términos como los componentes de la aceleraciónaparente Ap,/2' Por lo tanto, se define un símbolo para el término restante,(4-12)Este término recibe el nombre de componente de Coriolis de la aceleración. Es
evidente que se trata de un término de la ecuación de la aceleraCión aparente. Sinembargo, a diferencia de lo que pasa con las componentes deAPJf2' no la percibeunobservador en movimiento que se encuentre fijo en el sistema móvil de coordenadas2. Con todo, sigue siendo un término en la (l) y forma parte de la diferenciaentre Ap3 y Ap2 detectadas por un observador absoluto.Con la definición, la (l) se puede escribir de la siguiente manera, conocidacomo ecuación de la aceleración aparente.(4-13)en donde las definiciones de las componentes individuales son las expresadas enlasecuaciones (4-10) a (4-12).
En las aplicaciones es importante en extremo reconocer ciertas caracteristicasde esta ecuación: 1) Satisface los objetivos de esta sección porque relaciona lasaceleraciones de dos puntos coincidentes de diferentes eslabones, en una forma significativa.2) Sólo existe una nueva incógnita entre las tres componentes nuevasdefinidas. Las componentes normal y de Coriolis se pueden calcular a partir de lasecuaciones (4-10) y (4-12) basándose en la información sobre la velocidad, no contribuyencon nuevas incógnitas. No obstante, la componente tangencial A..3/2, tendrácasi siempre una magnitud desconocida en la aplicación, puesto que no sepuede encontrar d2s/dt2 3) Es importante hacer notar la dependencia de la (4-13)respecto a la capacidad de reconocer en cada aplicación la trayectoria que traza p
)tsobre el sistema de coordenadas 2. Esta trayectoria constituye la base para lasdirecciones de las componentes normal y tangencial, y también es necesaria paradeterminar p para la (4-10).Por último, una advertencia, la trayectoria descrita por P3 sobre el eslabón 2no es necesariamente la misma que la descrita por P2 sobre el eslabón 3. En lafigura 4-9, la trayectoria de P3 sobre el eslabón 2 es muy clara, es la ranura curva.La trayectoria de P2 sobre el eslabón 3 no es clara en lo absoluto. Como resultado de ello existe una manera natural correcta e incorrecta de escribir la ecuación dela
aceleración aparente para dicha situación. La ecuaciónes perfectamente válida; pero inútil, porque se desconoce p para la componentenormal. Nótese asimismo que Af,¡P2 emplea 6)2, mientras que Af,2P¡ usa W3.Se debe tener cuidado extremo al escribir la ecuación apropiada para cada aplicación,identificando la trayectoria conocida.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 166/508
148 TEORÍA DE MÁQUINAS Y MECANISMOSEjemplo 4-3 En la figura 4-10 se representa un bloque, 3, que se desliza hacia afuera sobre eleslabón 2, con una rapidez uniforme de 30 mIs, mientras que el eslabón 2 está girandocon unavelocidad angular constante de 50 radls cmr. Determínese la aceleración absoluta del
punto A delbloque.SOLUCIÓN En primer lugar calcúlese la aceleración absoluta del punto coincidente A.. que éstáinmediatamente debajo del bloque; pero perteneciente al eslabón 2,A", = %0 + A..,o, + ....A..!o, = W..RA,o, = (50 rad/s)2(500 mm) l 250 mis'Se construye la gráfica de esta expresión, determinando el punto imagen de aceleraciónA,. Luegose reconoce que el punto AJ está restringido a desplazarse sólo a lo largo del eje del eslabón 2.Esto proporciona una trayectoria para la que se puede escribir la ecuación de la a
celeraciónaparente,Los términos de esta ecuación se calculan como sigue y se suman gráficamente en el poligono deaceleraciones,AA)A, = 2W2 V A,/2 = 2 (50 rad/s)(30 mIs) 3000 m/s2An _ V..)/2 (30 mIs)' A,/2 - P 00 Orapidez uniforme a lo largo de la trayectoriaEsto localiza el punto imagen de aceleración AJ y el resultado esAA) 3 250 mIs' Resp.Ejemplo 4-4 Hágase un análisis de aceleración del eslabonamiento ilustrado en la figura 4-11,para la velocidad con$tante de entrada W2 = 18 rad/s mmr.
SoWCIÓN En primer lugar se realiza un análisis completo de velocidad, como se indicaen lafigura. Esto daVA = 12 pie/s VB,A = 10.1 pie/s VBJ/4=6.5pie/sw] W4 7.77 rad/s mmrPara hallar las aceleraciones, primero se encuentraAA =..O+A..o,+%,OA..o, W..RAo, = (18 rad/s)2(..2 Pie) = 216 pie/s 2y trácese la gráfica de esto para localizar el punto imagen de aceleración A. Luego escríbase laecuación de la diferencia de aceleración,VV >Iv (IV AH) = A A + A ..)A + A ..""
(l)El término A¡,A está dirigido de B hacia A y se agregan al polígono de aceleraciones, como se indica.El término A..,A tiene magnitud desconocida, pero es perpendicular RBA Puesto que la (1) tiene tres incógnitas, no se puede resolver; de donde, se buscauna segunda

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 167/508
ACELERACIÓN 149Yllor----.--------------XlFigura 4-10 Ejemplo 4-3.ecuación para ABJ. Considérese la perspectiva de un observador situado en el eslabón 4; éste
podría ver al punto B, moviéndose sobre una trayectoria rectilinea a lo largo de lalínea centraldel bloque. Con esta trayectoria, ahora se puede escribir la ecuación de la aceleración aparente(2)En vista de que el punto B4 está sujeto mediante pasador al eslabón de base, tiene aceleracióncero. Las otras componentes de la ecuación (2) sonAÍl,B. = 2W4 Ve,/4 2(7.n rad/s) (6.5 pie/s) 101 pie/s2A..,/4 V..¡J' (6.5 pie/ s J2 P 00 OLa componente de Coriolis se agrega al poUgono de aceleraciones originándose en elmismo punto
B. (DA), como se muestra. Por último, se suma AII"., cuya magnitud se conoce, gráficamentea ésta en la dirección definida por la tangente a la trayectoria. Esta última cruza larecta desconocidade AlijA. ecuación ( 1), localizando así el punto imagen de aceleración B3' Cuando elpoligono se mide a escala. se encuentra que los resultados sonA..". = 1 03 pie/s? AliJA 16 pie/s2A AFigura 4-11 Ejemplo 4-4: RAo, =.8 pulg. RBo, = 1 0 pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 168/508
150 TEORÍA DE MÁQUINAS Y MECANISMOSLas aceleraciones angulares de los eslabones 3 y 4 sona4 = a3 = A..)A =16 pie/s21 2 .3 rad/s2 crnrRBA 1 5.6/ 1 2 pie.
En este ejemplo se observa que se pueden imaginar tanto la trayectoria de B3 sobre eleslabón 4 corno la de B4 sobre el eslabón 3 y que pudo haberse usado cualquiera de ellas al decidirel·planteamiento. Sin embargo, aun cuando B4 está sujeto a la base (eslabón 1), se descbnocela trayectoria del punto B3 sobre el eslabón 1. Por ende, no se puede calcular enformadirecta el término A 11,/1 .Ejemplo 4-5 En el ejemplo 3-3 (Fig. 3 - 11) se realizó el análisis de velocidad delmecanismo invertidode corredera-manivela ilustrado en la figura 4-12. Determínese la aceleración angula
r deleslabón 4, si el eslabón 2 se impulsa con una velocidad constante.SOLUCI6N Revisando el ejemplo 3-3 se recordará queVA,=9pie/s VAD = 7.2 4pie/s VA"4= 5.52 pie/sW2 = 36 rad/s rnrnr W3 = W4 = 7.55 rad/s cmrPara analizar las aceleraciones se principia escribiendoAA, = ..o + A..E + %0A..E = W..RAE = (36 rad/s)2(i2Pie ) = 32 4 pie/s2y se traza la gráfica de esto corno se muestra en la figura.A continuación se observa que el punto A2 se desplaza recorriendo la trayectoria rectilíneailustrada, en relación con un observador situado en el eslabón 4. Conociendo esta tr
ayectoria, seescribe(a)F(b)(e)Figura 4-12 Ejemplo 4-5

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 169/508
vv oV VV ."..,0 o";A A, '" AA. + A :4,A,+ A; A,I' + A ..214en donde A:4",. '" O ya que p ca yACELERACIÓNA" V..,D_(7.24pie/s)2 -542
.12A,D R"'D - 1 1. 6/ 1 2 pie- . pIe s151(3)(4)El término A:4.v se suma a partir de OA, seguido por una recta de longitud desconocida correspondientea A...D' Puesto que no se conoce aún el punto imagen A.,no se pueden sumar los términosA..2A. y A;'",. como lo exige la (3). No obstante, se pueden transferir estos do
s términos alotro miembro de la ecuación (3) y restarse gráficanIente del punto de imagen A2, completando asíel polígono de aceleraciones. Ahora se puede hallar la aceleración angular del eslabón4,284pie/s _ 21 1 .6/ 1 2 pie - 294 rad/s cmr Resp.Esta necesidad de restar los vectores es común en problemas de aceleración que comprenden lacomponente de Coriolis y se deben estudiar con extremo cuidado. Nótese que no se puede emplearla ecuación opuesta que comprende a A:4J2 en vista de que p y, por ende, A..<i2 sería
una incógnita adicional (la tercera).4-6 ACELERACIÓN ANGULAR APARENTEAunque rara vez resulta útil, para tener el cuadro completo, se sugiere que tambiénse defina el término aceleración angular aparente. Cuando dos cuerpos rígidosgiran con aceleraciones angulares diferentes, la diferencia vectorial entre ellos sedefine como la aceleración angular aparente,La ecuación de la aceleración angular aparente también puede escribirse(4-14)Se observará que Ct3/2 es la aceleración angular del cuerpo 3, como apareceria anteun observador fijo en el cuerpo 2 y que gira con él.4-7 CONTACTO DIRECTO Y CONTACTO POR RODADURA
Por 10 que se explicó en la sección 3-7, se recordará que el movimiento relativo entre dos cuerpos en contacto directo puede ser de dos clases; se puede tener unavelocidad aparente de deslizamiento entre los cuerpos, o bien, puede no existirtaldeslizamiento. El término contacto por rodadura se definió de tal manera que implicaraque no es posible deslizamiento alguno y se desarrolló la condición de contactopor rodadura, ecuación (3-13), a fin de indicar que la velocidad aparente enun punto de este tipo es cero. Ahora se pretende investigar la aceleración aparenteen un punto de contacto por rodadura.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 170/508
152 TEORÍA DE MÁQUINAS Y MECANISMOS/--<..r;y....o..; de/2Figura 4-13 Contacto por rodadura.
P3 sobre eleslabón 2Considérese el caso de una rueda circular en contacto por rodadura con otroeslabón recto, como se ilustra en la figura 4-13. Aunque se reconoce que se tratadeun caso muy simplificado, los argumentos que se desarrollen y las conclusiones a las que se llegue son completamente generales y se aplican a cualquier situación decontacto por rodadura, sin importar las formas de los dos cuerpos o si cualquierade ellos es el eslabón de base . Para mantener este concepto claro en la mente, al
eslabón base se le ha asignado el número 2 en este ejemplo.Una vez que se da la aceleración Ac del punto central de la rueda, se puedeelegir el polo DA y se puede comenzar el poligono de aceleraciones trazando Ac.No obstante, al relacionar las aceleraciones de los puntos P3 y P2 , en el puntodecontacto por rodadura, se están manejando dos puntos coincidentes de cuerposdiferentes. Por lo tanto, se puede pensar en aplicar la ecuación de la aceleraciónaparente. Para esto, es preciso identificar la trayectoria que describe uno de estospuntos sobre el otro cuerpo. En la figura aparece ilustrada la trayectoria t queelpunto P3 describe sobre el eslabón 2. Aunque la forma precisa de la trayectoria
depende de las formas de los dos eslabones en contacto, siempre se tendrá una cúspideen el punto de contacto por rodadura, y la tangente a esta trayectoria puntiagudaserá siempre perpendicular a las superficies en contacto.Puesto que se conoce esta trayectoria, ya es posible escribir la ecuación de laaceleración aparenteAl evaluar las componentes, se debe tener presente la condición de velocidad decontacto por rodadura, a saber V p, y AnP /2----v2P J/2 - O J - PDe donde, sólo una componente de la aceleración aparente, A..,/2, puede ser diferentede cero.
Debido a la confusión posible de llamar componente tangencial (tangente a latrayectoria puntiaguda) a este término diferente de cero, mientras que su direcciónes normal a las superficies rodantes, se adoptará un nuevo superíndice y se let Esta curva en particular se conoce con el nombre de cicloide.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 171/508
ACELERACIÓN 153llamará aceleración de contacto por rodadura A..lI2. Por consiguiente, en el caso de contacto por rodadura, la ecuación de la aceleración aparente se transforma en(4-15)y se sabe que el término Ah/2 tiene siempre una dirección perpendicular a las
superficies en el punto de contacto por rodadura.Para entender mejor el método gráfico para el análisis de la aceleración demecanismos ,de contacto directo y de contacto por rodadura, se contrastarán lassoluciones de dos ejemplos muy similares.Ejemplo 4-6 Dado el dibujo a escala y el análisis de velocidad de la leva circularde contacto directo,con sistema de seguidor oscilante de cara plana, ilustrado en la figura 4-14a, determinese laaceleración angular del seguidor en el instante que se muestra. La velocidad angular de la leva esCtJ-¡ 10 rad/s mmr y su aceleración angular es a2 '" 25 rad/s2 mmr.SOLUCIÚN En la figura 4-14c se ilustra el polígono de velocidades del sistema de lev
a y se·guidor.El poligono de aceleraciones, figura 4-14<1, se principia calculando la aceleración del puntoBl y construyendo su gráfica, en relación con el punto AAB2 AA + AB2A + A..2AV]¡,A (30 pulg/s)2AB,A R 300 pulg/s2B,AA..,A = a2RS,A '" (25 radfs2)(3 pulg ) = 75 pulg/ sl(1)Estas se representan gráficamente como se indica y se encuentra el punto imagen deaceleración
Cl construyendo la imagen de aceleración del triángulo ABlC2 Si se procede como se hizo en la sección 3-7, se encontraría a continuación la velocidad delpunto Cl.Si se intenta este planteamiento al análisis de aceleración, la ecuación es(2)y se basa en la trayectoria que traza el punto Cl sobre el eslabón 3, presentada en la figura 4-14a.No obstante, este método resulta inútil porque se desconoce el radio de curvatura deesta trayectoriay, por ende, es imposible calcular A..2/3 Para evitar este problema se toma un camino distinto;es decir, se busca otro par de puntos coincidentes en donde se conozca la curvat
ura de latrayectoria.Si se considera la trayectoria trazada por el punto Bl sobre el eslabón 3 (extendido), se veráque sigue estando a uua distancia constante de la superficie; es una recta. Estenuevo planteamientose concibe mejor si se considera el mecanismo ilustrado en la figura 4· 14b, y seobservaque posee un movimiento equivalente al original. Habiendo imaginado así una ranuraen elmecanismo equivalente como una trayectoria, queda perfectamente aclarado cómo se debeproceder; la ecuación apropiada es
(3)en donde Bl es un punto coincidente con B2 , pero situado en el eslabón 3 . En vista de que la

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 172/508
trayectoria es una recta,oAíi¡Bl = 2"'l VB¡/l = 2( 10 rad/s)(50 pulg /s) 1000 pulgN
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 173/508
154 TEORlA DE MÁQUINAS Y MECANISMOSTrayectoria de C1 .. ,..-__ "sobre el eslabón - . \ 3(a)Trayectoria de B2 sobre el eslabón 3(el (d)
Fi..ura 4-14 Ejemplo 4-6.Se puede hallar la aceleración de B3 a partir deen donde..O + AllJD + A..]DV..JD (35.4 pulg/s)"3.58 puIgI-.... I" , II\1lc1J¡I _.... ,,/ II I
(b)350 puIg/s23(4)Al hacer las sustitución de la ecuación (4) en la (3), y reacomodando los términos, sellega a unaecuación que sólo tiene dos incógnitas,vV \Iv oV" 'l/v oYA B, - A B,B, - A..2i3 A llJD + A..JD ( 5)Esta ecuación se resuelve gráficamente como se ilustra en la figura 4-14d. Una vez que se ha encontradoel punto imagen B3 , se encuentra con facilidad e" construyendo la imagen de ace-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 174/508
ACELERACIÓN 155leración del triángulo DBJe}, incluido por completo en el eslabón 3. Se ha ampliado lafigura4-14d para presentar las imágenes de aceleración completas de los eslabones 2 y 3, con el fin delograr una mejor representación e ilustrar una vez más que no existe una relación obvi
a entre lasubicaciones finales de los puntos imagen e2 y e3, como lo sugiere la ecuación (2). Finalmente, se puede determinar la aceleración angular del eslabón 3 como sigue:938 pulg/s23.58 pulg262 rad/s2 mmr Resp. (6;A continuación consideramos otro problema ejemplo que está íntimamenterelacionando con el anterior.Ejemplo 4-7 Dado el dibujo a escala y el análisis de velocidad del rodillo circular, que rueda sinresbalar sobre el seguidor oscilante de cara plana ilustrado en la figura 4-150,
determínense lasaceleraciones angulares tanto del seguidor como del rodillo, en el instante indicado. La velocidadangular del eslabón 2 es W2 10 rad/s mmr y su aceleración angular es al = 25 rad/s2mmr.SOLUC16N En la figura 4-15b aparece el polígono de velocidades completo. El análisisdeaceleración se desarrolla exactamente como se indica en el ejemplo anterior. Una vez más, resultainútil proceder en principio con las ecuaciones correspondientes a las aceleraciones de los puntos(a) (b)(e)
Figura 4-15 Ejemplo 4-7.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 175/508
156 TEORÍA DE MÁQUINAS Y MECANISMOSel y e4 , una vez más es preciso usar el mecanismo equivalente de la figura 4-14b,Sólo se debeconsiderar la condición de contacto por rodadura después de que se ha encontrado laaceleracióndel punto el
Luego se puede relacionar el punto de aceleración e4 con la del punto B4 ,V..,B, (14,8 pulg 15)2RC8 - 1.50 pulg146 pulg Is2También se puede escribir la ecuación de la aceleración del contacto por rodadura (4-15) para estasituación Ac, = AC3 + Aé4i3 (8)Recordando que Aé4i3 es perpendicular a las superficies en el punto e, se puede construir gráficamentelas soluciones simultáneas para las ecuaciones (7) y (8) ilustradas en la figura (4-lSe),Por último, se puede hallar la aceleración del rodillo como se indica a continuación
(7)Ah8, 406 pulg/s2a4 2 1 .50 pulg 271 rad/s cmr Resp. ( 9)La aceleración angular del eslabón 3 es idéntica a la que se determinó en el ejemplo 4-6,a) = 262 rad/s2 mmr Resp.4-8 MÉTODOS ANALÍTICOS DEL ANÁLISISDE LA ACELERACIÓNEn esta sección se extienden los métodos analíticos del análisis de la velocidaddesarrollados en las secciones 3-8 y 3-9 para incluir el análisis de las aceleraciones.El método de Raven se basa en el álgebra compleja. Se recordará la formageneral de la primera derivada respecto al tiempo de un vector bidimensional, ex
presadoen forma compleja polar, de la ecuación (3- 1 4) ,R = Reí/l + jÓRei/l (a)Derivando una vez más con respeto al tiempo, se obtiene la forma general de lasegunda derivada respecto al tiempo(4- 16)Para ilustrar el método de Raven, analicemos el mecanismo excéntrico decorredera y manivela que aparece en la figura 4- 16. Para los simbolos definidosenella, la ecuación de cierre del circuito es(b)en donde 'lo 01 = -90°, '2, '3, Y 04 O son constantes. El ángulo (J2 es el ángulo
de la entrada impulsada y se supone que es conocido. Si se aplican los métodosde las secciones 2-8 y 3-8 se encuentra que la posición desconocida y las variablesde velocidad son(4- 17)(4- 1 8)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 176/508
yACELERACIÓN 157Figura 4-16 Mecanismo excéntrico decorredera y manivela.(4- 19)(4-20)
Las aceleraciones se calculan aplicando la forma general, ecuación (4- 1 6), paratomar la segunda derivada respecto al tiempo de la ecuación de cierre del circuito.Esto da(e)Aplicando la fórmula de Euler para separar esta ecuación compleja polar en suscomponentes real e imaginaria, se obtiene;:4 = - 82'2 sen 82 - Ó..'2 cos 82 - 83'3 sen 83 - Ój'3 COS 83 (d)0 = 82'2 COS 82 - Ó..'2 sen82 + D3'3 COS 83 - Ój'3 sen 83 (e)Estas dos ecuaciones se pueden resolver simultáneamente para las dos incógnitasde aceleración, 83 y ;:4 , '2 ' 2
e - -'2 COS 82 82 + '2 sen82 82 + ') sen 83 833 -') COS 8374 = -'2 sen 82 82 '3 sen 83 e3 '2 COS 82 Ó.. - '3 COS 83 ój(4-2 1)(4-22)La solución se considera ahora completa, puesto que las ecuaciones (4- 1 7) a (4-22)se pueden evaluar numéricamente (en ese orden) para cada ángulo de la manivela,(Jz , dadas las dimensiones 'l. '2, Y ') Y la velocidad y aceleración de entrada,82 y e2 Sin embargo, como preparación para el estudio de la dinámica del motor decombustión interna, que se desarrollará en el capítulo 14, conviene sefialar q'.le,
con las sustituciones de lo expresado en las ecuaciones (4- 1 7) , (4-19) Y (4-21 ) , Y trasmuchas operaciones adicionales, las ecuaciones (4-20) y (4-22) se pueden escribircomo(4-23)(4-24)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 177/508
158 TEORÍA DE MÁQUINAS Y MECANISMOSSi se toma el caso del mecanismo radial de corredera y manivela (rl O) y sesupone que r3 es mucho mayor que r2 (cos (h = 1), se obtienen las siguientes solucionesaproximadas(4-25)
(4-26)A continuación se presenta otro ejemplo que servirá para ilustrar el método deRaven.Ejemplo 4-8 Desarróllese una expresión angular para la aceleración angular de la manivela desalida de un eslabonamiento de cuatro barras.SOLUC10N Puesto que se trata de una continuación del ejemplo 3-5, ya se conocen las solucionespara la posición y la velocidad. La ecuación de cierre del circuito se toma de ese ejemplo yla rotación corresponde a la figura 2-13:( 1)
Recordando que todas las longitudes son constantes, se aplica la (4-16) para tomar la segundaderivada respecto al tiempo. Esto daLas operaciones subsecuentes se facilitan más si esta ecuación se divide entre ei..- 6..RsAei(8,-93l + j8zRsAe/ce,-81l - 6..s + j83Rcs = -6IRcveíC8d31 + j8.RcveJce.-8,) (3)Debido a esta rotación del eje real, la componente real de la ecuación ( 3) no contiene a la incóg-.. .. ,-9..RsA cos (92 - 9,) - 8zRsA sen (e2- 93) - 9Ulcs = -81RcDcos (e. - 83) - 8.RcDsen (94 - (3)(4)y se puede resolver con suma facilidad para 9. ,
. RSAsen (92 - 83)82 + RSA COS (82 - 83)9i + Rcs9.. - RCD cos (e. - 93)9¡ é. RCD sen(04 - 03) Resp.(4-27),Si la (2) se divide entre eje. y se toman las componentes reales, se puede encontrar también unasolución para el ,8 - RSA sen (e2 e.)82 3 + RBA COS (82 - 9.)9.. + Rcs cos (O. - 81)9i -RCDel - RC8 sen (e. - 83) (4-28)Los dos ejemplos anteriores muestran que, como se señaló en el caso de lasecuaciones de velocidades de la sección 3-8, se repite el hecho de que las ecuacionesde aceleraciones siempre son lineales en las incógnitas. Por consiguiente, su solu
ción,aunque quizá algo tediosa, también es directa.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 178/508
ACELERACIÓN 159El método de Chace..l'.._ a el análisis de la aceleración comprende las derivadasde vectores unitarios. Según la (3-2 1), la primera derivada respecto al tiempode un vector típico R esR = RR+ wR(k x R) (j)
en donde wk es la velocidad angular del vector R. Derivando una vez más con respectoal tiempo daR... = RuR" + R.RÁ + ciJR(kA x RA ) + wR. (k"" x RA ) + wR(kA x R;'" ) (g)No obstante, si ciJ se identifica como a, la aceleración angular del vector R, y seaplica la (3-20), esto se reduce a(4-29)Esta es una expresión general para la segunda derivada respecto al tiempo de cualquiervector bidimensional. tSe ilustrará el método de Chace para el análisis de la aceleración, obteniendo
las aceleraciones en el mecanismo invertido de corredera manivela que se ilustraenla figura 3-15. La ecuación de cierre del circuito es(h)Utilizando la forma general, ecuación (4-29), y reconociendo que rilo r2, Y Í'l sonconstantes, se toma la segunda derivada del tiempo de la ecuación (h)-w..r2Í'2 + a2r2(k x "2) = '¡¡4 + 2W47'4(k x "4) - w..r¡¡4 + a4r4(k x Í'4) (i)Puesto que se conocen las soluciones de la posición y la velocidad, por lo visto enla sección 3-9, y puesto que se dan Wz y a2 como las condiciones de manivela deentrada, las dos únicas incógnitas en esta ecuación son '4 y a4.Como se hizo en el análisis de velocidad al aplicar el método de Chace, setrata de eliminar una de las incógnitas mediante la elección cuidadosa de las direcc
ionesa lo largo de las cuales se toman las componentes. Notando queyse toma el producto escalar de cada término de la ecuación (l) con k x Í'4 , paraeliminar '4-w..r2i2 (k x "4) + a2r2(k X Í'2) (k x 1'4) = 2W47'4 + a4r4de lo cual se despeja a""t La restricción bidimensional se debe a la suposición de que w es igual a k.(j)(k)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 179/508
160 TEORtA DE MÁQUINAS Y MECANISMOSDel mismo modo, se puede tomar el producto escalar de la (¡) con f4 y se elimina a a4. Esto da(1)4-9 CENTRO INSTANTÁNEO DE ACELERACIÓN
Aunque de poca ayuda en el análisis, conviene definir el centro instantáneo deaceleración, o polo de aceleración, para un mecanismo de movimiento plano, aunquesólo sea por evitar la implicación de que el centro instantáneo de velocidadtambién es el centro instantáneo de aceleración. Este último se define como laubicación instantánea de un par de puntos coincidentes de dos cuerpos rígidosdiferentes, en donde las aceleraciones absolutas de los dos puntos son iguales.Si seconsidera un cuerpo fijo y otro móvil, el centro instantáneo de aceleración es elpunto del cuerpo en movimiento que posee una aceleración absoluta igual a ceroen el instante considerado.En la figura 4- 1 7a, sea P el centro instantáneo de aceleración, un punto deaceleración absoluta cero cuya ubicación se desconoce. Supóngase que otro punto,
A , del plano móvil tiene una aceleración conocida AA y que se conocen CA) y a delplano móviL Entonces se puede escribir la ecuación de la diferencia de aceleración,(o)Despejando AA , se obtieneAA = w2RpARpA - aRpA(k x RpA) (b)Ahora, puesto que RPA es perpendicular a k x RPA, los dos términos de la derechade la (b) son las componentes rectangulares de AA, como se ilustra en la figura4-1 7b . Tomando esta figura como base, se puede obtener la magnitud y la direcciónde RpA-----------------x(a) (b)(4-30)
Figura 4-17 Centro instantáneo deaceleración.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 180/508
ACELERACION 161(4-3 1 )L a ecuación (4- 3 1 ) afirma que s e puede hallar l a distancia RpA , del punto A hasta el centro instantáneo de aceleración, partiendo de la magnitud de la aceleración
AA de cualquier punto del plano en movimiento . Puesto que el denominadorw 2 siempre es positivo, el ángulo y siempre es agudo.Hay muchos métodos gráficos para localizar el centro instantáneo de aceleración.t Aquí se presenta un método sin incluir su demostración. En la figura 4-1 8se dan los puntos A y B Y sus aceleraciones absolutas AA y AB Prolónguense AA yAB hasta que se intersequen en Q; constrúyase luego un círculo que pase por lospuntos A, B Y Q. Dibújese ahora otro circulo que pase por los extremos de AA yAB , Y el punto Q. La intersección de los dos circulos sitúa al punto P que es el centroinstantáneo de aceleración.4-10 ECUACIONES DE EULER-SAVARy :j:En la sección 4-5 se desarrolló la ecuación de la aceleración aparente (4- 1 3) . Luego,
en los ejemplos que siguieron, se encontró que era de suma importancia el hechode elegir un punto cuya trayectoria aparente fuera conocida, de tal modo quet N. Rosenauer y A.H. Willis, Kinematics el Mechanisms, Associated General Publications, Sidney,Australia, 1953, pp. 145-156; reeditado por Dover, New York, 1967; K. Hain (traducido por T.P.Goodman y otros), Applied Kinematics 2a. ed., McGraw-HilI, New York, 1967, pp. 149- 158.:j: Las referencias más importantes y útiles sobre este tema son Rosenauer y Willis,ep. cit., cap. 4 ;A.E.R. de Jonge, H A Brief Account o f Modern Kinematics", Jrans. ASME, vol. 65,1943,pp. 663-683;
R.S. Hartenberg y J. DenaVÍt, Kinematics Synthesis 01 Linkages, McGraw-Hill, New York, 1 964, cap. 7;A.S. Hall, Jr. , Kinematics and Linkage Design, Prentice Hall, Englewood Cliffs,N.J., 1961, cap. 5(este libro es realmente una obra clásica sobre la teoría de los mecanismos y contiene muchos ejemplosútiles); Hain, op. cit., cap. 4.AFigura 4-18 Método de los cuatro círculos para localizar elcentro instantáneo de aceleración P.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 181/508
162 TEORíA DE MÁQUINAS Y MECANISMOSpudiera hallarse por simple observación el radío de curvatura de la trayectoria,necesario para la componente normal de la ecuación (4-10). Esta necesidad deconocer el radio de curvatura de la trayectoria dicta a menudo el método de planteamientopara resolver este tipo de problemas, como en la figura 4-6b, y en
ocasiones necesita incluso la concepción de un mecanismo equivalente. Seria másconveniente si se pudiera escoger un punto arbitrario y calcular el radío de curvaturade su trayectoria. En mecanismos planos se logra esto aplicando los métodosque se presentan a continuación.Cuando dos cuerpos rígidos se mueven en relación el uno del otro, siguiendoun movimiento plano, cualquier punto A elegido arbitrariamente, uno de ellos,describe una trayectoria o lugar geométrico relativo a un sistema de coordenadasfijo en el otro. En cualquier instante dado existe un punto A', perteneciente alotrocuerpo , que es el centro de curvatura del lugar geométrico de A . Si se toma la inversión
cinemática de este movimiento, A' describe también un lugar geométricorelativo al cuerpo que contiene a A , Y sucede que A es el centro de curvatura de estelugar geométrico . Por consiguiente, cada punto actúa como el centro de curvaturade la trayectoria trazada por el otro, y se dice que son conjugados el unodel otro. La distancia entre estos dos puntos conjugados es el radio de curvatura decualquiera de los dos lugares geométricos.En la figura 4-19 se presentan dos círculos cuyos centros son e y e'. Consideremos el círculo con centro en e' como la centro da fija, y el círculo con centroe como la centroda móvil de dos cuerpos que experimentan cierto movimientoplano relativo en particular. En realidad, la centroda fija no lo está necesariame
nte,sino que pertenece al cuerpo que contiene a la trayectoria cuya curvatura sebusca. Tampoco es necesario que las dos centrodas sean círculos; lo único que interesason los valores instantáneos y, por conveniencia, se supondrá que las centrodasson círculos que se ajustan a las curvaturas de las dos centrodas reales, en laregión cercana a su punto de contacto P. Como se sefialó en la sección 3-16, cuandolos cuerpos que contienen a las dos centrodas poseen un movimiento relativoentre sí, dichas centrodas parecen rodar una en contra de la otra, sin resbalar. Porsupuesto, su punto de contacto P es el centro instantáneo de velocidad. Debido aestas propiedades, se puede pensar que las dos centrodas circulares representan
realmente las formas de los dos cuerpos en movimiento, si esto ayuda a concebirelmovimiento.Si la centroda móvil tiene cierta velocidad angular dada w relativa a la centrodafija, la velocidad instantánea t del punto e esVc = wRcp (a)Del mismo modo, el punto arbitrario A, cuyo punto conjugado A' se desea encontrar,tiene una velocidad det Todas las velocidades utilizadas en esta sección son, en realidad, velocidades aparentes relativasal sistema de coordenadas de la centro da fija; se escriben como velocidades absolutas para simplificar la
notación .

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 182/508
Centrodamóvil+ Normal a las centrodasPolo de inflexión-;"\"--¡--1 _- _ .._...Centro decurvatura
CentrodafijaFigura 4-19 Construcción de Hartmann.ACELERACIÓN 163Lugar geométrico de Aa las centrodas(b)Conforme progresa el movimiento, el punto de contacto de las dos centrodasy, por ende, la ubicación del centro instantáneo P, se mueve a lo largo de ambascentrodas, con cierta velocidad v. Como se muestra en la figura, se puede hallarvconectando una recta que vaya del extremo de V c hasta el punto G'. De otra
manera, se puede determinar su magnitud partiendo dev = RRcpC' Vc C' (e)En la figura 4-19 se presenta una construcción gráfica para A ', el centro decurvatura del lugar geométrico del punto A, y recibe el nombre de construcciónde Hartmann. En primer lugar, se encuentra la componente u de la velocidad v, delcentro instantáneo, como esa componente paralela a V A o perpendicular a RAP Acontinuación, la intersección de la recta AP y la recta que conecta a los extremosde las velocidades V A Y u da la ubicación del punto conjugado A' . El radio decurvatura p del lugar geométrico del punto A es p = RAA,.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 183/508
164 TEORíA DE MÁQUINAS Y MECANISMOSTambién resultaria conveniente una expresión analítica para localizar el puntoA ' , Y se puede obtener a partir de la construcción de Hartmann. La magnitud dela velocidad u está dada poru v sen t{! (d)en donde t{! es el ángulo medido desde la tangeute a las centrodas a la línea de acc
iónde RAP Luego, observando los triángulos semejantes de la figura 4-19, sepuede escribir tambiénuRpA' V RAA, A (e)Ahora, al igualar las expresiones de las ecuaciones (d) y (e), y sustituir lo exJ?resadoen las ecuaciones (a) , (b) y (e), daSi se divide entre w sen t{! y se invierte, se llega aRAA, RcC' wRAPRpA' sen t{! RcpRpC' vLuego, tomando en cuenta que RAA' == RAP RA,p Y RcC' = Rcp
reducir esta ecuación a la forma (_1 _1 )sen .1' __ _ RAP - RA,p 'f' Rcp RC'P(1)(g)RC'p, se puede(4-32)Esta importante expresión es una de las formas de la ecuación de Euler-Savary.Una vez que se conocen los radios de curvatura de las dos centrodas Rcp Y RC'p,sepuede aplicar esta ecuación para determinar las posiciones de los dos puntos conjugadosA y A' relativas al centro instantáneo P.Antes de proseguir, es preciso aclarar algo sobre las convenciones de los signos.
Cuando se usa la ecuación de Euler-Savary, es factible elegir arbitrariamenteun sentido positivo para la tangente a las centrodas ; entonces, la normal positiva alas centrodas está entonces a 90° de ella, en sentido opuesto al movimiento de lasmanecillas del reloj . Esto establece una dirección positiva para la recta CC' quesepuede usar para asignar los signos apropiados a Rcp y RC'p. De manera análoga,se puede elegir una dirección positiva arbitraria para la recta AA'. Entonces se tomael ángulo t{! como positivo en el sentido opuesto al movimiento de las manecillasdel reloj , partiendo de la tangente positiva a las centradas hasta el sentido positivo
de la recta AA'. El sentido de la recta AA' da también los signos apropiados paraRAP y RA'p , para la ecuación (4-32) .Existe un inconveniente importante con la forma anterior de la ecuación deEuler-Savary, en que es preciso encontrar los radios de curvatura de ambas centrodas,Rcp Y Re,p, Por lo general, se desconocen tanto como la curvatura delpropio lugar geométrico; puede vencerse esta dificultad buscando una nueva formade la ecuación.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 184/508
ACELERACIÓN 165Consideremos el punto particular identificado como l en la figura 4- 1 9. Estepunto se localiza sobre la normal a las centrodas en la posición definida por(h)Si se elige este punto en particular para A en la (4-32), se encuentra que su punto
conjugado l' deben estar localizado en el infinito. El radio de curvatura de latrayectoria del punto l es infinito y el lugar geométrico de l tiene, por ende, un punto de inflexión en l. El punto l se conoce con el nombre de polo de inflexión.Consideremos ahora si hay algunos otros puntos lA del cuerpo en movimientoque tengan también radios de curvatura infinitos en el instante considerado . Si esasí , entonces, para cada uno de dichos puntos, R1AP = O y, según }as ecuaciones(4-32) y (h)(4-33)Esta ecuación define un círculo llamado circulo de inflexión cuyo diámetro es R¡p,como se ilustra en la figura 4- 1 9 . Todo punto de este círculo tiene su punto co
njugadoen el infinito y, por lo tanto, cada uno posee un radio de curvatura infinitoen el instante que se muestra.Ahora, con la ayuda de la (4-33), la ecuación de Euler-Savary se puede escribiren la forma(4-34)Asimismo, después de varias operaciones, a esto se le puede dar la forma(4-35)Cualquiera de estas dos formas de la ecuación de Euler-Savary, (4-34) y (4-3 5), esmás útil en la práctica que la (4-32), ya que no exigen que se conozcan las curvaturas de las dos centrodas. Lo que sí requieren es encontrar el círculo de inflexión;
pero en el siguiente ejemplo se demostrará cómo se puede hacer esto.Ejemplo 4-9 Hállese el círculo de inflexión para el movimiento del acoplador del eslabonamientode corredera y manivela ilustrado en la figura 4-20, y determinese el radio instantáneo de curvaturade la trayectoria del punto e del acoplador.AFigura 4-20 Ej emplo 4-9. RAo, = 2 pulg RBA 2.5 pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 185/508
166 TEORíA DE MÁQUINAS Y MECANISMOSSOLUCiÓN Se principia en la figura 4-21 por localizar el centro instantáneo P en laintersecciónde la recta 02A y la recta que pasa por B, perpendicular a su dirección de recorrido. Por definición,los puntos B y P deben estar sobre el circulo de inflexión; de donde, sólo se necesi
taconocer un punto adicional para construir el circulo.Por supuesto, el centro de curvatura de A se encuentra en O2, que se llamará ahoraA'.Tomando el sentido positivo de la recta AP como descendente y hacia la izquierda, se tieneR"A' = -2 pulg y RAP 2.64pulg. Entonces, al hacer la sustitución correspondiente en la (4-35),se obtiene2.642 _ 2.00 = -3.48 pulg (1)Con esto, se miden 3.48 pulg a partir de A para localizar lA, un tercer punto so
bre el circulo de in·flexión. Ahora, se puede construir el circulo que pasa por los tres puntos B, P elA, y puededeterminarse su diámetro,R¡p = 6.28 pulg. Resp.Figura 4-21 Ejemplo 4-9.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 186/508
ACELERACIÓN 167También pueden trazarse , si se desea, la normal y la tangente a las centradas como se ilustra en lafigura.Después, al trazar el r ayo Rclc y tomar como su sentido positivo el descendente yhacia la izquierda
se puede medir Rcp = 3.1 pulg y RC1c = -1.75 pulg . Al sustituir estos valores en la ( 4-35),se puede despejar el radio de curvatura instantáneo de la trayectoria del punto C. R'h 3.12 1 p = Rcc = RlcP = - 1 .7 5 -5. 49pu g Resp.en donde el signo negativo indica que C' está debajo de C sobre la recta C' CP.4-11 CONSTRUCCIONES DE BOBILLIER(2)La construcción de Hartmann, sección 4- 10, proporciona un método gráfico paraencontrar el punto conjugado y el radio de curvatura de la trayectoria de un puntoen movimiento; pero requiere que se conozca la curvatura de las centrodas fija y
móvil. Sería conveniente contar con métodos gráficos para obtener el círculo de inflexióny el conjugado de un punto dado, sin necesidad de conocer la curvatura delas centrodas. En esta sección se presentan este tipo de soluciones gráficas quereciben el nombre de construcciones de Bobillier.Para entender estas construcciones gráficas, considérese el círculo de inflexióny la normal a las centrodas N así como la tangente a las centrodas T, ilustradas enla figura 4-22. Seleccionemos dos puntos cualesquiera A y B del cuerpo en movimiento,que no estén sobre una recta que pase por P. Ahora, con la ecuación deEuler-Savary, es factible encontrar los dos puntos conjugados correspondientes A'
y B'. .L a intersección de las rectas AB y A'B' se identifica con la letra Q; entonces,N----4-----....--------.--- TFigura 4-22 Teorema de Bobillier .

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 187/508
168 TEORLA DE MÁQUINAS Y MECANISMOSla recta que se traza por P y Q se denomina eje de colineación. Este eje se aplica sólo a las dos rectas AA' y BB' , de modo que se dice que pertenece a estos dosrayos; asimismo, el punto Q se localizará en forma distinta sobre el eje de colineación,
si se elige otro conjunto de puntos A y B , sobre los mismos rayos. Sinembargo, existe una relación única entre el eje de colineación y los dos rayosusados para definirlo. Esta relación se expresa en el teorema de Bobillier, el cualafirma que el ángulo medido de la tangente a las centradas hasta uno de estosrayos es el negativo del ángulo medido del eje de colineación hasta el otro rayo .Al aplicar la ecuación de Euler-Savary a un mecanismo plano , por 10 comúnse pueden encontrar dos pares de puntos conjugados por simple observación y, apartir de ellos, se busca determinar en forma gráfica el círculo de inflexión. Porejemplo, un eslabonamiento de cuatro barras con una manivela OzA y un seguidor04B tiene a A y Oz como un juego de puntos conjugados, y a B y 04 como elotro, cuando se tiene interés en el movimiento del acoplador en relación con
el marco de referencia. Dados estos dos pares de puntos conjugados , ¿cómo seaplica el teorema de Bobillier para hallar el circulo de inflexión ?En la figura 4-230, supóngase que A y A' y B Y B' representan los paresconocidos de puntos conjugados. Los rayos trazados por cada par se intersecan en P , el centro instantáneo de velocidad, dando un punto del circulo de inflexión . El punto Q se localiza a continuación, por medio de la intersección de un rayo quepase por A y B con otro que pase por A' y B'. Después se puede trazar el eje decolineación como la recta PQ.El siguiente paso se ilustra en la figura 4-23b. Al trazar una recta por P ,paralela a A' B', s e identifica el punto W como la intersección d e esta recta con la
recta AB. Ahora se hace pasar por W una segunda recta paralela al eje de colineación.Esta recta se interseca con AA' en lA y con BB' en lB" los dos puntosadicionales del círculo de inflexión que se están buscando.Ahora se podría construir el círculo por los tres puntos lA, lB, y P; pero existeuna manera más fácil. Recordando que un triángulo inscrito en un semicirculo esun triángulo recto que tiene al diámetro por hipotenusa, se levanta una perpendiculara AP en lA y otra a BP en lB. La intersección de estas dos perpendicularesda el punto /, el polo de inflexión, como se ilustra en la figura 4-23c. Puesto quePE es el diámetro, se pueden construir con suma facilidad el círculo de inflexión,
la normal a las centrodas N y la tangente a las centro das T.Para demostrar que esta construcción satisface el teorema de Bobillier, nóteseque el arco que va de P a lA es inscrito por el ángulo que forma IAP con la tangentea las centrodas. Pero el mismo arco también es inscrito por el ángulo PI Ala;de donde, estos dos ángulos son iguales. Pero la recta IAlB se trazó originalmenteparalela al eje de colineación ; en c{)nsecuencia, la recta PlB forma también elmismo ángulo f3 con el eje de colineación.El problema final es aprender a usar el teorema de Bobillier para hallar elconjugado de otro punto arbitrario, por ejemplo e, cuando se da el círculo de inflexión.En la figura 4-24 se une e con el centro instantáneo P y se localiza el puntode intersección le con el círculo de inflexión. Este rayo sirve como uno de los
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 188/508
ACELERACIÓN 169N--------.....--------+------T( e lFigura 4-23 Construcción de Bobillier para localizar el círculo de inflexión.dos que se necesitan para localizar el eje de colineación. Para el otra, se puede
usartambién la normal a las centradas, en vista de que se conoce tanto 1 como su punto conjugado I', en el infinito . Para estos dos rayos, el eje de colineación es unarectaque pasa por P, paralela a la recta lel, como se mostró en la figura 4-23. Lo quefalta de la construcción es semejante a la de la figura 4-23. Q se localiza por lain-
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 189/508
170 TEORíA DE MÁQUINAS Y MECANISMOSNQFigura 4-25 Ejemplo 4-10.TFigura 4-24 Construcción de Bobillier para
localizar el punto conjugado e'.tersección de una recta que pase por 1 y C, con el eje de colineación. Luego, unarecta que pase por Q e [', en el infinito se interseca con el rayo PC en C', elpuntoconjugado para C.Ejemplo 4-10 Aplíquese el teorema de Bobillier para hallar el centro de curvaturade la curva delacoplador del punto e, correspondiente al eslabonamiento de cuatro barras ilustrado en la figura4-25.SOLUCIÓN Localicese el centro instantáneo P en la intersección de AA' y BB'; localícesetambién
Q¡ en la intersección de AB y A'B'. PQI es el primer eje de colineaci6n. Pasando porP,trácese una recta paralela a A '1J' a fin de localizar a W sobre AB. Trácese una recta paralela a
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 190/508
ACELERACIÓN 171PQI, pasando por W, para ubicar a lA sobre AA' y a lB sobre BB'. Luego, pasandopor lA,trácese una perpendicular a AA' y, pasando por lB ' una perpendicular a BB'. Estasperpendicularesse intersecan en el polo de inflexión l y definen el círculo de inflexión, la normal a
lascentrodas N y la tangente a las centrodas T.Para obtener el punto conjugado de C, trácese el rayo PC y localícese le sobre el círculo deinflexión. El segundo eje de colineacíón PQ2, perteneciente al par de rayos pe y PI, es una rectaque pasa por P, paralela a una recta (suprimida) que va de 1 a le. El punto Q2 se obtiene como laintersección de este eje de colineación y una recta le. Ahora, pasando por Q2 ' trácese una rectaparalela a la normal a las centrodas; su intersección con el rayo PC da C', el centro de curvatura
de la trayectoria de e4-12 CÚBICA DE CURVATURA ESTACIONARIAConsidérese un punto del acoplador de un eslabonamiento plano de cuatro barrasque genera una trayectoria relativa al marco de referencia cuyo radio de curvatura,en el instante considerado, es p. Puesto que la curva del acoplador, en la mayor parte de los casos, es de sexto orden, este radio de curvatura cambia continuamenteconforme el punto se mueve. Sin embargo, en ciertas situaciones , la trayectoria tendrá una curvatura estacionaria, lo cual significa quedp = 0
ds(a)en donde s es la distancia recorrida a lo largo de la trayectoria. El lugar geométricode todos los puntos del acoplador, o el plano en movimiento, que tienen curvaturaestacionaria en el instante considerado, recibe el nombre de cúbica de curvaturaestacionaria o bien, en algunas ocasiones, curva del punto en circulación . Sedebe observar que la curvatura estacionaria no significa necesariamente curvaturaconstante, sino más bien que el radio de curvatura que varía continuamente estápasando por un máximo o un mínimo.
Aquí se presentará un método gráfico rápido y simple para obtener la cúbicade curvatura estacionaria, según descripción de Rain. t En la figura 4-26 se tiene eleslabonamiento de cuatro barras A' ABB', en donde A' y B' son los pivotes en elmarco . Entonces, A y B poseen una curvatura estacionaria, de hecho, una curvaturaconstante en torno a los centros en A' y B'; por consiguiente, A y B estánsobre la cúbica.El primer paso de la construcción es obtener la normal a las centrodas y latangente a las centradas. Dado que no se necesita el círculo de inflexión, se localizael eje de colineación PQ como se ilustra, y se traza la tangente a las centrodas T
con el ángulo '" respecto a la recta PB', igual pero con dirección opuesta al ánguloI/J , de la recta PA' al eje de colineación. Esta construcción se deduce directamente

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 191/508
del teorema de Bobillier . También se puede construir la normal a las centrodas N. En este punto conviene reorientar el dibujo sobre la mesa, del tal modo que laregla T o la orilla horizontal del aparato de dibuj o quede a lo largo de la normal alas centradas.tHain, op. cit. , pp. 498-502.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 192/508
172 TEORÍA DE MÁQUINAS Y MECANISMOS1l '": " ,' , I--..I --_-_ ', "- ' S¡1 ---"- l I '..-' ---
- - - - - - - - - - - - - - - - - - - - - - - - - l- - - - - - -.... ..- Be 'Figura 4-26 Cúbica de curvatura estacionaria.I TA continuación se traza una recta que pase por A, perpendicular a PA, y otraque pase por B, perpendicular a PE. Estas rectas se intersecan con la normal a lascentrodas y la tangente a las centrod::ls en AN, AT Y BN, BT, respectivamente,como se muestra en la fig . 4-26. Ahora se dibujan los dos rectángulos PANAaATy PBNBaBT; los puntos Aa Y Ba definen una recta auxiliar G que se usa paraobtener otros puntos de la cúbica.Ahora se elige cualquier punto So de la recta G. Un rayo paralelo a N ubica a"ST y otro paralelo a T localiza a SN. Conéctese ST con SN y trácese una perpendicul
ara esta recta que pase por P; esto ubicará al punto S, otro punto de lacúbica de curvatura estacionaria. Ahora se repite este proceso con la frecuenciaque se desee, eligiendo diferentes puntos sobre G, y se traza la cúbica como unacurva suave que pase por todos los puntos S así obtenidos.Nótese que la cúbica de curvatura estacionaria posee dos tangentes en P, latangente normal a las centrodas y la tangente tangente a las centrodas. El radiodecurvatura de la cúbica en estas tangentes se obtiene como se indica a continuación.Prolónguese G para que se interseque con T en GT y con N en GN (no aparece en lailustración). Luego, la mitad de la distancia PGT es el radio de curvatura de lacúbica en la tangente normal a las centrodas, y la mitad de la distancia PGN es el
radio de curvatura de la cúbica en la tangente a la tangente de las centrodas.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 193/508
ACELERACIÓN 173Se produce un punto con propiedades interesantes en la intersección de lacúbica de curvatura estacionaria con el círculo de inflexión; conocido como puntode Ball. Un punto del acoplador coincidente con el punto de Ball describe unatrayectoria que es aproximadamente una recta, en virtud de que tiene curvatura estacionaria
y se localiza en un punto de inflexión de su trayectoria.La ecuación de la cúbica de curvatura estacionaria* ess..n ", + N c..s '" .. O (4-36)en donde r es la distancia del centro instantáneo hasta el punto de la cúbica,medida con un ángulo '" respecto a la tangente a las centrodas. Las constantes M y N se obtienen aplicando dos puntos cualesquiera que se sepa están sobre lacúbica, como por ejemplo, A y B de la figura 4-26. Sucede tambiént que M y Nson, respectivamente, los diámetros PGr y PGN de los círculos con centro sobre latangente a las centrodas y la normal a las centrodas, cuyos radios representan lascurvaturas de la cúbica en el centro instantáneo.
PROBLEMAS:!:4-1 El vector de posición de un punto se define mediante la ecuación en donde R se da en pulgadas y t( t3). R 4t -3 i + IOj, en segundos. Calcúlese la aceleración del punto cuando t = 2 s., 4-2 Encuéntrese la aceleración en t = 3 s de un punto que se mueve según la ecuaciónLas unidades son metros y segundos.4-3 La trayectoria de un punto se describe por la ecuaciónR (t2 + 4)e..j..tI10en donde R se expresa en milimetros y t en segundos. Para t = 20 s, encuéntrese elvector tangenteunitario para la trayectoria, las componentes normal y tangencial de la acelerac
ión absoluta del punto yel radio de curvatura de la trayectoria.4-4 El movimiento de un punto se describe mediante las ecuaciones en donde x y yse dan en pies y t ent3 sen 21Tt y = 6 x = 4t cos 1Tt3 ysegundos. Calcúlese la aceleración del punto cuando t = 1.40 s.*Si se desea una deducción de esta ecuación, véase Hall, op. cit., pág. 98, o Hartenbergy Denavit,op. cit., p. 206.t D. C. Tao, Applied Linkage Syn thesis, Addison, Wesley, Reading, Mass. , 1 964, p. 1 1 1.:1: Al asignar los problemas, quizá el maestro desee especificar el método de resolu
ción a seguir, envista de la diversidad de planteamientos que se dan en el texto.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 194/508
174 TEORtA DE MÁQUINAS Y MECANISMOS2 A0- %-- .L.....AA . 600 p;./,'t= 1 50pie/s2300 60°A e 2 BProblema 4-5 RAo, = 500 mm. Problema 4-6 RBA = 20 pulg.
4-S El eslabón 2 de la figura posee una velocidad angular W2 120 cmr y una aceleración angular de4800 rad/s2 cmr en el instante que se muestra. Determínese la aceleración absoluta del punto A.4-6 E l eslabón 2 está girando e n e l mismo sentido del movimiento d e las manecillas del reloj, como seindica en la figura. Encuéntrese su velocidad angular y aceleración, así como la aceleración de su puntomedio C.4-7 Para los datos que se dan en la figura, determínese la velocidad y la aceleración de los puntos B y C.4-8 En el caso del mecanismo de línea recta ilustrado en la figura, Wz = 20 rad/s
mmr y 1X2 = 140 rad/s2mmr. Determínese la velocidad y la aceleración del punto B, y la aceleración angular del eslabón 3.4-9 En la figura correspondiente, la corredera 4 se está moviendo hacia la izquierda a una velocidadconstante de 20 m/52 Calcúlese la velocidad y la aceleración del eslabón 2.4-10 Resuélvase el problema 3-8 para la aceleración del punto A y la aceleración angular del eslabón 3 .4-11 E n el caso del problema 3-9, encuéntrense las aceleraciones angulares d e los eslabones 3 y 4.4-12 Resuélvase el problema 3-lO para la aceleración de! punto C y las aceleracionesangulares de loseslabones 3 y 4.
4-13 Calcúlese la aceleración del punto C y las aceleraciones angulares de los eslabones 3 y 4, con losdatos del problema 3-1 1 .4-14 Con los datos del problema 3- 1 3 , calcúlense las aceleraciones de los puntos C y D, Y la aceleraciónangular del eslabón 4.4-15 Con los datos del problema 3-14, calcúlense la aceleración del punto C y la aceleración angular deleslabón 4.4-16 Resuélvase el problema 3- 1 6 por lo que respecta a la aceleración del punto Cy la aceleración angulardel eslabón 4.
4-17 Determínese la aceleración del punto B y las aceleraciones angulares de los eslabones 3 y 6, para elproblema 3- 1 7 .VA -20 pie/s eProblema 4-7 RBA = 1 6 pulg , RCA = 10 pulg , RCB8 pulg.B~3 e°2 .._ _ .. RPBrAo blemas 4-8 ,y 4-9 R40! RcA = 100 mm.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 195/508
ACELERACIÓN 175BAqc._ _-'-Problemas 4-24 a 4-304-18 Con los datos del problema 3- 1 8 , ¿qué aceleración angular se le debe dar al eslabón 2 para que en
la posición que se muestra la aceleración angular del eslabón 4 sea cero?4-19 Con los datos del problema 3- 19, ¿qué aceleración angular se le debe dar al eslabón 2 para que laaceleración angular del eslabón 4 sea lOO rad/s2 rnrnr, en el instante que se muestra?4-20 Resuélvase el problema 3-20 para la aceleración del punto C y la aceleración angular del eslabón 3 .4-21 Con los datos del problema 3-2 1 , calcúlese la aceleración del punto C y la aceleración angular deleslabón 3 .4-22 Determínese l a aceleración de los puntos B y D del problema 3-22.4-23 Encuéntrense las aceleraciones de los puntos B y D del problema 3-23.
4-24 a 4-30 La nomenclatura para este grupo de problemas se indica en la figura,y las dimensiones y losdatos aparecen en la tabla adjunta. En cada caso, se deben determínar los valoresde 63, 64, (0)3, (0)4, a3,y «4. La velocidad angular W2 es constante para cada problema y se usa un signo negativo para indicarel sentido del movimíento de las manecillas del reloj . Las dimensiones de los problemas con número parse dan en pulgadas; y los problemas impares se expresan en milímetros.Probo TI T2 T34-24 4 6 94-25 100 150 2504-26 14 4 1 4
4-27 250 100 5004-28 8 2 104-29 400 1 25 3004-30 16 5 1 2T4102501040063001 2
62, grad240-45O70402 1 03 1 5W2, rad/sl5610-6
1 2- 1 8- 18
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 196/508
4-31 La manivela 2 del sistema ilustrado posee una velocidad de 60 rpm cmr. Determinese la velocidad yla aceleración del punto B y la velocidad y aceleración angulares del eslabón 4.4-32 El mecanismo ilustrado en la figura es un mecanismo de dirección marino denominado correderade Rapson. 02B es la caña del timón y A C es la varilla de mando. Si la velocidad deAC es de 10
pulg/min hacia la izquierda, determinese la aceleración angular de la caña del timón.4-33 Determínese la aceleración del eslabón 4 del problema 3-26.4-34 Con los datos del problema 3-27, determínese la aceleración del punto E.4-35 Calcúlese la aceleración del punto B y la aceleración angular del eslabón 4 que secitó en el problema3-24.4-36 Con los datos del problema 3-25, determínese la aceleración del punto B y la aceleración angulardel eslabón 3.4-37 Suponiendo que los eslabones 2 y 3 del problema 3-28 están girando a velocidad constante, encuéntresela aceleración del punto P4'

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 197/508
176 TEORÍA DE MÁQUINAS Y MECANISMOSBy xProblema 4-31 Ro,o, = 1 2 pulg , RAo, = 7 pulg, RBO, = 28 pulg. Problema 4-324-38 Resuélvase el problema 3-22 para las aceleraciones de los puntos A y B.4-39 Con los datos del problema 3-33, determínese la aceleración del punto C. y la a
celeración angulardel eslabón 3, si a la manivela 2 se le imprime una aceleración angular de 2 rad/s2cmr.4-40 Determínense las aceleraciones angulares de los eslabones 3 y 4 del problema3-30.4-41 Para el problema 3-3 1 , determínese la aceleración del punto G y las aceleraciones angulares de loseslabones 5 y 6.4-42 Encuéntrese el CÍrculo de inflexión para el movimiento del acoplador del mecanismo de doblecorredera ilustrado en la figura. Escójanse varios puntos sobre la normal a las centrodas y determínense
-i- ----BProblema 4-42 RBA = 1 25 mm. Problema 4-43 RCA = 2.5 pulg, RAo, = 0.9 pulg , RBO, = 3.5pulg,Rpo, = l . 1 7 pulg.sus puntos conjugados. Háganse las gráficas de las porciones de las trayectorias deestos puntos, paraque el lector se convenza de que, en efecto, los conjugados son los centros de curvatura.4-43t Encuéntrese el círculo de inflexión para el movírniento del acoplador relativo almarco deleslabonamiento ilustrado en la figura. Encuéntrese el centro de curvatura de la curva de acoplador del
punto C y genérese una porción de la trayectoria de C para verificar los resultados. t Este mecanismo aparece en la obra de D. Tesar y J. C. Wolford, "Five Point Exact Four-BarStraight-Line Mechanisms", Trans. 7th Con/. Mech., Penton, Cleveland, Ohio, 1962.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 198/508
A.. ____________ .. BACELERACIÓN 177Problema 4-45 RAA, = Ipulg, RBA = 5pulg ,RB'A' = 1 .75 pulg , RBB, = 3.25 pulg.4-44 Para el movimiento del acoplador en relación con el marco, hállese el círculo deinflexión, la normal
a las centrodas, la tangente a las centrodas y los centros de curvatura de los puntos e y D deleslabonamiento del problema 3-13. Elíjanse puntos del acoplador que coincidan conel centro instantáneoy el polo de inflexión, y trácense sus trayectorias.4-45 En un papel de 18 x24 pulg, trácese el eslabonamiento ilustrado en la figura,con sus dimensionesreales, ubicando A' a 6 pulg del borde inferior y a 7 pulg del derecho. Se aprovechará mejor el papel inclinandoel marco aproximadamente 15.., como se indica.a) Encuéntrese el círculo de inflexión. b) Trácese la cúbica de curvatura estacionaria. e)Elíjase un punto e del acoplador que coincida con la cúbica y constrúyase la gráfica de
una porciónde su curva del acoplador cerca de la cúbica.el) Encuéntrese el punto conjugado C. Trácese un círculo que pase por e y cuyo centrosea e ycompárelo con la trayectoria real de C.e) Encuéntrese el punto de Ball. Localícese un punto D en el acoplador, en el puntode Ball, y constrúyasela gráfica de una porción de su trayectoria. Compárese el resultado con una recta.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 199/508
CAPÍTULOCINCO--------------------------------------------------------.MÉTODOS NUMÉRICOS EN EL ANÁLISISCINEMÁTICO5-1 INTRODUCCIÓN
Los primeros cuatro capítulos se dedicaron a desarrollar una base teórica firmepara el análisis cinemático de los mecanismos. Se han presentado los métodos parael análisis de posición, desplazamiento, velocidad y aceleración, y se citaron ejemplosde cómo pueden aplicarse tales métodos a la resolución de problemas en elplano.Por sus propias definiciones, las soluciones de velocidad y aceleración sonproblemas del análisis vectorial. Sin embargo, aunque se utilizó una notación vectorialrigurosa en todos los desarrollos anteriores, se presentó una gran variedad detécnicas de solución, incluyendo soluciones gráficas, técnicas algebraicas, álgebravectorial y métodos del álgebra compleja. Como se vio, la base teórica de todos estos
procedimientos es la misma; no obstante, cada método de resolución posee suspropios puntos débiles y fuertes que le son característicos.Desde un punto de vista histórico, las técnicas gráficas han desempeñado unpapel predominante en la resolución de problemas de cinemática, en el plano. Estose entiende con facilidad tomando en cuenta las ventajas del procedimiento gráfico:se realiza sencilla y rápidamente, y ofrece una visión interna excelente delfuncionamiento de un mecanismo en particular, debido a la facilidad con que sepueden concebir los pasos de resolución. También evita las operaciones algebraicastediosas inherentes a la resolución de ecuaciones de orden elevado o trascendentes.No obstante, el método gráfico cuenta también con ciertas desventajas. Cuandose trabaja con una escala razonable, en la mayor parte de los problemas se
puede esperar una solución con un error del 1 o 2 por ciento, si se tiene el cuidadosuficiente. Sin embargo, no es factible esperar una mayor precisión a partir de una

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 200/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁ TICO 179solución gráfica. Asimismo, un método gráfico es una buena elección cuando seanaliza un mecanismo en una sola posición; pero se hace muy laborioso cuandose trata de muchas posiciones, debido a que debe iniciarse cada una de ellas como sise tratara de un problema completamente nuevo. Con frecuencia, el disefío de una
máquina requiere encontrar la velocidad máxima de un punto o la fuerza máximaque se transmite a través de una articulación, en todo su ciclo de operación. Entales circunstancias, cuando se trabaja gráficamente, se ha hecho práctica comúnobtener soluciones únicamente para unas cuantas posiciones, suponer, sin demostración,que los valores obtenidos son representativos y luego aplicar un factor deseguridad adecuado para cubrir esta suposición arriesgada.Por otro lado, ya sea que se basen en el álgebra compleja o en el álgebra vectorial, los métodos algebraicos no adolecen de las desventajas antes citadas. Laexactitud del método no se ve limitada por el álgebra sino sólo por la exactitud delos datos del problema, y el cuidado que se tenga en la evaluación numérica final
de los resultados. Asimismo, una vez que se ha obtenido la/orma algebraica de la solución, se puede evaluar con la frecuencia que se desee, en diferentes posicionesdel mecanismo, con muy poco esfuerzo. Los inconvenientes de los procedimientosalgebraicos son la necesidad de operaciones matemáticas tediosas que se puedenrequerir para determinar la forma de la solución y la posibilidad de un errormatemático, puesto que se reduce la intima relación entre la concepción y la intuiciónfísica.En resumen, aunque la preferencia histórica se ha inclinado a favor .de losprocedimientos gráficos, dicha preferencia se vio totalmente trastornada por eldesarrollo de la computadora digital y, en los últimos afios, de la calculadora electrónica
de bolsillo. Antes de que surgieran estas herramientas, la promesa de unamayor exactitud para los procedimientos algebraicos fue un tanto ficticia, porquela regla de cálculo no brindaba una precisión mayor que la que ofrecían las construccionesgráficas cuidadosas. Por otro lado, la precisión de la calculadora o lacomputadora digital sobrepasa con mucho la que requieren los problemas dedisefío mecánico, y no exige más esfuerzo por parte del disefíador que la preparacióncuidadosa de los datos de entrada.La segunda ventaja notable de la computadora es su capacidad de ....nservar yreutilizar un programa de trabajo. Por ende, vale la pena realizar las tediosasmanipulaciones matemáticas para encontrar la forma de la solución, puesto que
ahora sólo se necesita hacerlo una vez y luego puede usarse para una gran variedad de problemas, con dimensiones diferentes o en posiciones diferentes. Aunque el esfuerzopara resolver un problema particular en una posición dada es quizá mayor,esto puede quedar recompensado por las soluciones casi instantáneas en otrasposiciones o con los cambios en las dimensiones de los eslabones. Aunque estacapacidad para reutilizar un programa se restringió inicialmente a las grandes computadorasdigitales, ahora es bastante común en las calculadoras de bolsilloprogramables, en las que se cuenta con cintas magnéticas de memoria en las que sepueden almacenar programas operacionales para uso posterior.Dada esta capacidad de conservarlos y reutilizarlos, ahora vale la pena escribir
programas un tanto c omplejos para computadora o calculadora, porque el esfuer-
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 201/508
180 TEORíA DE MÁQUINAS Y MECANISMOSzo invertido en escribirlos lo justifica su uso repetido. En general, se disponede algunosprogramas bastante complejos (véase la sección 5-5), los cuales permiten unaamplia variedad de capacidades de análisis; incluso en problemas muy complicados,tan sólo se requiere un esfuerzo mínimo en la preparación de los datos por
parte del diseñador. A decir verdad, áreas del conocimiento tales como el análisisde esfuerzos, se han revolucionado por completo gracias a la aplicación de procedimientosbasados en computadoras que se han desarrollado en los últimos años.Con el tiempo, esto mismo puede suceder en los campos de la cinemática de losmecanismos o la dinámica de las máquinas. No obstante, en la actualidad, lanecesidad primordial es la comprensión básica de los principios fundamentales dela manera en que se puede usar la computadora en estas áreas, puesto que el desarrolloy la adopción de programas generales de gran alcance están todavía en lainfancia.El propósito de este capítulo es presentar una comprensión básica de cómo
puede usarse la calculadora electrónica o la computadora digital para resolver las relaciones cinemáticas de los capítulos anteriores. Los métodos fundamentales empleadosson las técnicas algebraicas, incluyendo vectores y álgebra compleja, queya se trataron con cierta profundidad. El objetivo de este capítulo no es volver a desarrollar las técnicas del álgebra compleja de Raven, por ejemplo, sino presentarlineamientos que muestren la manera en que se pueden programar para usarlos enla computación digital. Hasta ahora, el material referente a los análisis de posición, desplazamiento, velocidad y aceleración se han presentado sin hacer mención algunade las computadoras, de modo que este capitulo se puede ocupar de ellos en
forma conjunta. Aquí se presentará el procedimiento general para usar una computadoraen esos problemas y se harán muchas sugerencias sobre estilos y procedimientosde programación. Luego, al proseguir con los capítulos subsiguientes,con frecuencia se hará una pausa para reflexionar sobre cómo se puede programarese aspecto en particular.Este capítulo no tiene como fin convertirse en un tratado sobre análisis numérico,ni presentar los detalles de algún lenguaje de programación para computadoraen particular. La presentación que se hace aquí está encaminada a un aspectoun tanto general, puesto que cada individuo se verá limitado en su elecciónpor los medios con los que cuente y los lenguajes de que disponga. Es más, la tecnología
de las computadoras sigue avanzando "Con gran rapidez, y cualquierprocedimiento especifico pronto se volverá obsoleto.5-2 PROGRAMACIÓN DE UNA CALCULADORA ELECTRÓNICAEn esta sección se presentan varios ejemplos apropiados para obtener solucionesutilizando una calculadora programable; aunque, por supuesto, también sonaplicables en grandes computadoras. Los lectores que usen una calculadora noprogramable o que tenga una capacidad l imitada de almacenamiento, seguirían lasmismas estrategias para resolver estos ejemplos; pero encontrarían necesario volvera marcar las operaciones cada vez que se inicien.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 202/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁTICO 181Para principiar a enfocar un problema que va a resolverse en una calculadoraprogramable, el primer paso es desarrollar un método apropiado, denominado algoritmo.Se debe recordar que una calculadora (o computadora) sólo puedemanejar cantidades numéricas y no símbolos algebraicos; de donde, es necesario
desarrollar por completo una solución algebraica de forma cerrada para el problema deseado, antes de que pueda programarse. No se puede usar una calculadoracon este fin; y sólo es útil cuando llega el momento de evaluar la respuestanumérica para un conjunto específico de datos numéricos.Al desarrollar el algoritmo para un problema en cinemática, se puede usarcualquiera de los métodos algebraicos de los capítulos anteriores. Por supuesto, nose puede hacer que la calculadora lea datos tales como las longitudes de loseslabones a partir de un dibujo; en consecuencia, se debe considerar con muchocuidado cuál debe ser el conjunto mínimo de datos que se pedirán al usuario.Asimismo, es preciso ver que los pasos de solución queden ordenados de talmanera que, en cada uno de ellos, se disponga de los datos requeridos ya sea por
parte del usuario o del paso de cálculo previo.Ejemplo 5-1 Desarróllese un algoritmo apropiado para una calculadora electrónica programable,para hallar la sumaR = rl + r2 + ... + r¡ + ... + r m + al x bl + a2 x .. + ... + a¡ x b¡ + ... + 8. X b.(1)en donde los datos de entrada van a ser las coordenadas cartesianas de los vectores tridimensionalesr¡, aj, y b¡r¡ r:1 + r..j + rfka¡=aji+aJj+ajkbj=b¡l+bJj+bjk
(2)(3)(4)El resultado final se va a almacenar, en la forma de coordenadas cartesianas, enlas memorias 1,2Y 3.SOLUCIÓN El siguiente algoritmo se presenta como una serie de pasos, aunque se podría mostrarcon igual facilidad en forma de diagrama de flujo.Paso 1. Sitúense las memorias en cero.Paso 2. Recíbanse los datos enteros para m; almacénese m en la memoria 4.Paso 3. Si la memoria 4 es cero o positivo, pásese al paso 8.
Paso 4. Recíbanse los datos para rf y súmense a la memoria l.Paso 5. Recíbanse los datos para r; y súmense a la memoria 2.Paso 6. Recíbanse los datos para rl y súmense a la memoria 3.Paso 7. Súmese 1 a la memoria 4 y regrésese al paso 3.Paso 8. Recíbanse los datos enteros para n; almacénese - n en la memoria 4.Paso 9. Si la memoria 4 es cero o positivo, pásese el paso 16.Paso 10. Recíbanse los datos para aj, al y af; almacénense en las memorias 5, 6 Y 7,respectivamente.Paso 11. Redbanse los datos para bt, b; Y bj; almacénense en las memorias 8, 9 y lO, respectivamente.Paso 12. Calcúlese a;bj - a¡bJ y súmese el resultado a la memoria 1 .

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 203/508
182 TEORÍA DE MÁQUINAS Y MECANISMOSPaso 13. Calcúlese aib¡ - aib¡ y súmese el resultado a la memoria 2.Paso 14. Calcúlese ajb; a}bj y súmese el resultado a la memoria 3.Paso 15. Súmese 1 a la memoria 4 y regrésese al paso 9.Paso 16. Muéstrese sucesivamente en la pantalla el contenido de las memorias 1, 2Y 3, como los
resultados para RX, RY Y R', respectivamente.Se pueden usar los datos siguientes para comprobar la programación obtenida. Dados m= 2,f¡ -41+2j, f2=2i-3k,n 2,a¡=i-3j,b¡ 21+2k, a2=4i+.3j,.. i. El vectorsolución es R = -si.En este ejemplo se observará que el cuidado que se ponga en enunciar cadapaso de un algoritmo con precisión, reducirá enormemente el tiempo requeridopara escribir un programa, y eliminará muchas fuentes potenciales de error. Escribircada paso o dibujar un diagrama de flujo, antes de hacer la programación,ayudará también en la búsqueda posterior de errores posibles, y en la presentacióndel programa final.
Conforme se desarrolla el algoritmo, tambien se debe considerar con amplitudel uso eficiente de las memorias disponibles. La mayor parte de los programaspara calculadora encontrarán que las memorias insuficientes son el factor limitanteen la complejidad de los algoritmos que sea factible emplear. En el caso del ejemploanterior, puede verse cómo se usó la memoria 4 para almacenar tanto a mcomo a n, y cómo se usó cada vector recibido como datos antes de que se recibierael siguiente, en lugar de admitir y almacenar todos los vectores antes de que se iniciaran los cálculos. Por lo tanto, el programa resultante sólo necesita 10 memoriasy no queda limitado por lo que respecta a los números de vectores m y n.
Cuando se completa la programación, se debe dar atención especial a la redaccióndel programa; porque, de otra manera, se corre el riesgo de olvidar elprocedimiento de resolución cuando se desee volver a usarlo. La documentacióndebe incluir, como minimo, una descripción breve del método usado, toda suposiciónlimitante, una lista del número, orden y forma de los datos de entradanecesarios, y una descripción del número, orden, forma y ubicación de los resultadosfinales. Además, también se considera que un problema de ejemplo, juntocon sus datos numéricos y su solución, constituyen una parte recomendable de unprograma bien documentado. La buena documentación es quizá el aspecto másimportante de la escritura de un programa y, sin embargo, a menudo es la másdescuidada. Con frecuencia, esto conduce a tener que volver a desarrollar, con el
costo consecuente, programas ya existentes, debido a que su documentación esinadecuada y, por ende, resultan inútiles cuando se presenta la necesidad de utilizarlos.Ejemplo 5·2 Desarróllese un algoritmo para un programa de calculadora que tenga porfin calcularla posición, la velocidad y la aceleración de todos los eslabones de un mecanismo excéntricode corredera-manivela. Las dimensiones r¡, r2, Y '3, consignadas en la figura 5-1,se van a recibircomo datos. La solución se va a iniciar con el ángulo especificado de la manivela /hy se va a incrementaren el ángulo especificado 1182, con la frecuencia que se desee. Se supondrá además que:
la velocidad angular de la manivela, especificada por el usuario, es constante.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 204/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁ TlCO 183SOLUCIÚN El desarrollo de las ecuaciones de posición, velocidad y aceleración para elmecanismoexcéntrico de corredera y manivela se puede llevar a cabo por medio del método de Raven,aplicando álgebra compleja, como se describió con todo detalle en las secciones 2-10
, 3-8 Y 4-8.Las ecuaciones finales son de la (4-17) a la (4-22). El algoritmo para evaluarlas con una calculadoraprogramable podria ser como sigue:Paso l. Recíbanse los datos numéricos para T10 T, Y Tl, Y almacénense en las memorias1, 2 Y 3,respectivamente.Pasa 2. Recíbanse los datos numéricos para 82, t:.82 Y 82, Y almacénense en las memorias 4, 5 Y 6,respectivamente.Paso 3. Calc.llese T2 sen 82 y T2 cos 8" Y almacénense en las memorias 7 y 8, respectivamente.
Paso 4. Calcúlese y muéstrese en la pantalla 8} = sen -1 [(TI + T2 sen8;)/TJ].Paso 5. Calcúlese T) senely T) cos 03, y almacénense en las memorias 9 y 10, respectivamente.Pasa 6. Calcúlese y muéstrese en la pantalla T. T2 COS 82 + T2 cos 8).Paso 7. Calcúlese y muéstrese en la pantalla é} = - (é,T, cos (2)/(r2 cos el).Paso 8. Calcúlese y muéstrese en la pantalla r. = - é2T, sen 82 - Ó)T) sen 8l.Paso 9. Calcúlese y muestrese en la pantalla él = (¡ijT2 , sen 82 + ír3 sen (3)/(T3 COS..).Paso 10. Calcúlese y muéstrese en la pantalla r4 = -( e3T) sen 8l + ¡ijT2 COS 82 + éíT) cos 8).Pasa 11. Súmese 1182 de la memoria 5 a 82 de la memoria 4.Paso 12. Regrésese al paso 3 y repitase.Como comprobación de la exactitud del programa, úsese: TI 0.150 m, T2 = 0.300 m, r3
= 0.900 m,82 0, t:.82 = 90°, y Ó2 = 40 rad/s. Cuando se llega a la posición 82 = 2700 , el conjunto de resultadosredondeados que se presenten deben ser 8) = 9.594°, T4 = 0.887 m, é3 = 0, '4 = 12 rt;tls,83 = - 540.899 rad/s2, Y ;4 = 81.135 m/S2.Este ejemplo pone en evidencia la cuestión de las unidades. Se considerabuena-, práctica obtener las ecuaciones para los programas de esta índole sin hacerreferencia alguna a un conjunto de unidades en particular. Luego, es factibleaplicar cualquier sistema de ellas con el programa, siempre y cuando sean coherentes.La alternativa es restringir el programa a un conjunto particular de unidades.
En todo caso, la elección de las mismas se debe establecer con toda claridaden la documentación. En el ejemplo anterior, el programa mismo es independientedel conjunto de unidades empleado; sin embargo, puesto que los datos de pruebase dieron en metros, los resultados tuvieron las unidades de metros por segundosymetros por segundo al cuadrado.El ejemplo revela también un caso típico de equilibrio necesario entre el usoeficiente de las memorias y la velocidad mejorada de los cálculos. Las memorias 7Figura 5-1 Ejemplo 5-2. Mecanismo excéntrico decorredera-manivela.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 205/508
184 TEORÍA DE MÁQUINAS Y MECANISMOSa 10 se elr.plearon en los pasos 3 y 5 para almacenar términos geométricos a loscuales se recurre repetidas veces en los cálculos de los pasos 4 y del 6 al 10. Alusarestas cuatro memorias, las funciones trigonométricas se calculan una sola vez cada
illla, ahorrando así illl tiempo considerable. Si no se cuenta con el número suficientede memorias, podrían volverse a calcular cada vez. También se evitó el usode más memorias, mostrando inmediatamente los resultados en la pantalla despuésde calcularlos, en lugar de almacenarlos.Otra cuestión que se presenta también es la de las unidades que se usarán paralos valores numéricos almacenados de los ángulos. Evidentemente, para facilitar suuso, cualesquiera datos de entrada que comprendan ángulos, como 82 y !:l(J2 delejemplo anterior, se deben expresar en grados y no en radianes; no obstante, espreferible usar radianes para las velocidades y las aceleraciones angulares. Enlamayor parte de las calculadoras los ángulos se pueden expresar ya sea en grados o
radianes, y se aplicarán las filllciones trigonométricas según la situación de unteclado que indica la selección. En tales casos, es preferible dejar todos los ángulosen grados; pero es necesario hacer notar que algunas calculadoras no poseen esta opción. Asimismo, en las computadoras digitales que usan FORTRAN o BASIC,las funciones trigonométricas tales como SIN, COS o TAN presupondrán que losángulos se expresan en radianes. En estos casos es necesario convertir los datos angularesde entrada a radianes, por medio de pasos de programa adicionales. yluego convertir cualquier ángulo calculado nuevamente a grados, para presentarloen la pantalla.Por lo común, el mejor método para comprobar un programa es comparar los
resultados con una solución gráfica del mismo problema. Los ángulos se puedenmedir rápidamente con illl transportador. Mientras que un punto decimal se puedecolocar erróneamente en un programa de computadora, un vector que sea 10 vecesmás largo que lo normal no pasará inadvertido en una solución gráfica. De la mismamanera, la precisión gráfica es casi siempre suficiente como para verificar si unprograma de computadora funciona en forma adecuada, ya que generalmente loserrores de programación darán origen a diferencias más bien drásticas que sutilesen los resultados.Ejemplo 5-3 Desarróllese un algoritmo para un programa de calculadora para calcular la posiciónangular y velocidad de todos los eslabones de un eslabonamiento plano de cuatrobarras. Las longitudes
de los eslabones TI, T2, 'l, Y 74 que se dan en la figura 5-2 se recibirán como datos, juntocon el ángulo inicial especificado 82, el incremento en el ángulo Á82, y la velocidadangular 82 dela manivela de entrada.SOLUC¡Ól' El desarrollo de las ecuaciones apropiadas se hizo en las secciones 2-10 y3-8, y setrata de las ecuaciones (2-58), (2-59), ( 3-18) Y ( 3-19). El algoritmo para suevaluación es el siguiente:Paso 1. Recibanse los datos numéricos para TI> '2.' r) y 7., Y almacénense en las memorias 1,2,3 Y 4, respectivamente.Paso 2. Recíbanse los datos numéricos para fh, Á(J2 y 82, Y almacénense en las memorias
5, 6 y7, respectivamente.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 206/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁ TICO 185Paso 3. Calcúlese a = (ti + d - rT - d)/2r3r4 y almacénese en la memoria 8.Paso 4. Calcúlese b = rtlr3r4 y almacénese en la memoria 9.Paso 5. Calcúlese e = r2 sen (J2 y almacénese en la memoria 10.Paso 6. Calcúlese d = r2 cos (J2 y almacénese en la memoria 11.Paso 7. Calcúlese y preséntese en la pantalla el ángulo de transmisión "Y = cos-I (a + b
d).Paso 8 Calcúlese sen "Y y cos "y, Y almacénense en las memorias 12 y 13.Paso 9. Calcúlese y muéstrese en la pantalla.(J 2 -1-c+r4sen"y3 = tan d + r3 - r, - r4 cos "Yy almacénese en la memoria 14 .Paso JO. Calcúlese y muéstrese en la pantallaPaso 11. Calcúlese y muéstrese en la pantalla9 - 92r2 sen«(J4 - (J2)3 - r3 sen "yPaso 12. Calcúlese y muéstrese en la pantalla
9 - 92r2 sen«(J3 - (J2)4 -r4 sen "yPaso 13. S úmese !l(J2 de la memoria 6 a (J2 de la memoria 5.Paso 14. Regrésese al paso 5 y repítase.Para comprobar el programa, úsese un eslabonamiento de manivela y oscilador con las siguientesdimensiones: r, = 10 pulg, r2 = 4 pulg, r3 = 10 pulg y r4 = 12 pulg. En (J2 = O,92 = 45rad/s, los resultados redondeados son "y = 30°, (J3 = 93.8°, (J4 = 123.7°, Y 93 = 94 =-30 rad/s.El algoritmo antes descrito da la solución para la configuración abierta de uneslabonamiento plano de cuatro barras. Dependiendo de la situación inicial, es
probable que el usuario desee resolverlo para la configuración cruzada. Como loindican las ecuaciones (2-58) y (2-59), se obtendría el caso de la configuracióncruzada cambiando los signos más y menos en los numeradores de los pasos 9 y 10.Esto requiere una leve reprogramación, a medida que s e corre cada conjunto dedatos del problema, lo que crea una situación poco deseable. Una alternativa seríasolicitar otro elemento de los datos de entrada que especificara la configuración----.. _ ..--------------....- .------XlFigura 5-2 Ejemplo 5-3.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 207/508
186 TEORÍA DE MÁQUINAS Y MECANISMOSbuscada, y luego modificar el algoritmo para que se bifurque hacia las ecuacionesapropiadas. Una alternativa más seria calcular y presentar en la pantalla ambasconfiguraciones para cada conjunto de datos del problema . No obstante, cada una
de estas alternativas requiere más memorias y un programa más largo.Una cuestión íntimamente relacionada con esto es la que consiste en saber, silas ecuaciones originales se desarrollaron con la precisión necesaria para hacer quese distingan las configuraciones abierta y cruzada del eslabonamiento. Si sehubieran usado las ecuaciones (2-52) y (2-53) en lugar de las (2-58) y (2-59), porejemplo, habría sido necesario ver que los ángulos <p yo/fueran ambos menoresque 1800, Y que if¡ fuera positivo en tanto que sen </> tuviera el mismo signo que sen (J2. Estas son condiciones no fáciles de programar y pueden resultar engañosascuando se trata de juzgar lo apropiado de una solución analítica. A primera vista,
las ecuaciones (2-58) y (2-59) parecen ser más complicadas que la (2-52) y (2-53), pero no requieren estas pruebas adicionales. Este tipo de sutilezas se pasan amenudo por alto (o se desprecian deliberadamente), cuando se desarrollanecuaciones para resolver a mano, porque se pueden tomar en cuenta con facilidadpor el conocimiento de la naturaleza física de la situación en la etapa apropiada de los cálculos. Sin embargo, al escribir un programa, cada detalle se debe definir conprecisión, de tal suerte que sea factible ejecutarlo en una calculadora o computadoraque son, en resumidas cuentas, aparatos sin inteligencia.Otro aspecto importante es el referente a los cuadrantes de los ángulos, sobre
todo al calcular las funciones trigonométricas inversas, como el arco coseno delpaso 7 o los arcos tangentes de los pasos 9 y 10. Este tipo de filllciones trigonométricasinversas son, por sus definiciones matemáticas, multiformes, o de valoresmúltiples . Con todo, cada programa para calculadora o computadora dará lugar auna sola respuesta, elegida por decisión del fabricante más que del programador.Es preciso tener un cuidado extremo para saber cuál es el cuadrante específicoseleccionado para que una calculadora en particular proporcione el resultado, al emplear esta clase de funciones de valores múltiples, no siempre son los mismos en calculadoras diferentes .
Algunas calculadoras vienen equipadas para efectuar directamente la conversiónde un vector bidimensional, de la forma rectangular bien la polar, o a la funcióninversa, de la forma polar a la rectangular. Después de colocar las componentesx y y de un vector en los registros apropiados , basta un solo golpe de tecla (o paso del programa) para obtener tanto la magnitud como el ángulo del vector. Másaún, en este caso se obtendrá el ángulo en el cuadrante apropiado, determinadopor los signos de las componentes x y y. Si se dispone de esta índole de conversiones,se pueden usar para evitar el cálculo directo del seno y el coseno, digamoscomo alternativas de los pasos 5 y 6 del ejemplo anterior . También es factibleusarlas para evitar el dilema del cuadrante de las funciones trigonométricas inversas,
si se pueden calcular tanto el coseno como el seno del ángulo tt Al escribir un programa para computadora en FORTRAN, se puede obtener la mismaventaja

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 208/508
usando la función ATAN2 en lugar de ATAN, ASIN o ACOS. No obstante, en algunas computadoras,

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 209/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS C INEMÁTICO 1875-3 PROGRAMACIÓN DE LAS ECUACIONES DE CHACECuando se analizan mecanismos planos resulta muy útil contar con un conjunto deprogramas ya escritos y probados para la resolución de los cuatro c asos de laecuación de cierre del circuito en el plano que comprenda dos incógnitas. Estoscuatro casos se identificaron y analizaron en el capitulo 2. Los procedimientos
gráficos de resolución se presentaron con todo detalle en la sección 2-7, las solucionescon álgebra compleja en la sección 2-8 y las soluciones con álgebra vectorialde Chace en la sección 2-9. En esta sección se presentan algoritmos para lasolución numérica de cada uno de los cuatro casos, aplicando el método de Chaceen una calculadora electrónica.Por lo que respecta a la notación, se supone que la ecuación bidimensional decierre del circuito que se va a resolver se ha reducido previamente a tres vectorescon dos incógnitas. Así pues, tiene la formaeé=AÁ+BB (5-1)A
donde C por ejemplo, es un vector unitario a lo largo del vector C; forma un ángulo6c en relación con el eje x y posee las componentes éx y éY en las direccionesxyy.Puesto que a menudo los cuatro casos se usarán juntos, resulta útil organizarsus datos en la forma semejante. Por consiguiente, se supone que las memorias 1a12 están reservadas para los valores de L": 6c, ex, ey, A, OA, A\ AY, B, OB, BX,y BY, respectivamente. Se supone que si se necesita la solución de un caso en particularse introducirán datos conocidos en las memorias apropiadas. Entonces secargará y se correrá e l programa, situando los resultados en otras memoriasapropiadas. Por lo tanto, los problemas de introducción de datos y presentación de
los resultados se consideran como algo independiente de los algoritmos de solución.Ejemplo 5-4 Desarróllese un algoritmo para resolver el caso 1 de la ecuación (5-1) cuando las incógnitasson e y Oc. Supóngase que los datos para AX, AY, BX y BY ya están almacenados en las memorias 5, 6, 9 y lO, respectivamente. Se deben calcular los valores ex, e" e yBe Y almacenarlosen las memorias l a 4, respectivamente.SOLUCIÓ!'l La ecuación apropiada para encontrar la solución es la (2-39); y el algoritmo es:Paso 1. Calcúlese ex AX + BX y almacénese en la memoria 1.
Paso 2. Calcúlese e' A' + BY y almacénese en la memoria 2.Paso 3. Calcúlese e v' (ex)2 + (eY)2 y almacénese en la memoria 3.Paso 4. Calcúlese Oc = tan-I (e'le:); úsense los signos de ex y e' para que se obtenga el cuadrantecorrecto; y almacénese en la memoria 4.Paso 5. Alto.ATAN2(Y,x) simplemente dividirá el primer argumento entre el segundo y luego utilizará ATAN.Puesto que esto anula por completo el propósito de la función AT AN2, es necesario escribir un subprogramaARCT( Y,X) para ejecutar lo que AT AN2 debe hacer.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 210/508
188 TEORÍA DE MÁQUINAS Y MECANISMOSPara comprobar el programa pueden usarse los siguientes datos:almacénense AX = 5, AY = -8.661, BX = -20, BY = O en las memorias 5, 6, 9 Y 10, respectivamente.Los resultados redondeados,a lmacenados en las memorias 1 a 4, deben ser cx = -15.00,0
CY = -8.661, C = 17.321, Y Oc = 210.0000 Ejemplo 5-5 Desarróllese un algoritmo para la solución del caso 2a de la ecuación (5-1), tomandoA y B como incógnitas. Supóngase que los datos de cx, C" OA y eB ya están almacenadosen lasmemorias 1, 2, 8 Y 12, respectivamente.SOLUCION La solución para el caso 2a está dada por las ecuaciones (2-40) y (2-41). El algoritmopropuestoes:Paso l. Calcúlese Ax = cos OA y Ay = sen eA y almacénese en las memorias 5 y 6 .Paso 2. Calcúlese B X = c o s O B y BY = sen O B y almacénese e n las memorias 9 y 10.
Paso 3. Calcúlese P = cos (OB -eA) y almacénese en la memoria 13.Paso 4. Calcúlese A = (CX BY - CY BX)! P y almacénese en la memoria 7.Paso 5. Calcúlese B = (CY Ax - ex Ay)! P y almacénese en la memoria 11.Paso 6. Multiplíquese el contenido de las memorias 5 y 6 por A .Paso 7. Multiplíquese el contenido de las memorias 9 y 10 por B.Paso 8. Alto.Los siguientes datos servirán para comprobar el programa: almacénense cx = -15, CY =-8.661,eA = _600,e B = 1800 en las memorias 1, 2, 8 Y 12, respectivamente. Los resultados redondeados,almacenados en las memorias 5 a 7 y 9 a 11, deben ser AX = 5.000, AY = -8.661, A= 10.000,W = - 20.000, BY = O, y B = 20.000.
Ejemplo 5-6 Desarróllese un algoritmo para resolver el caso 2b de la ecuación (5-1),siendo A yeBlas incógnitas. Supóngase que los datos para Cx, c,., eA y B ya están almacenados en las memorias1,2,8 Y 11, respectivamente.SOLUCIÓN La solución para el caso 2b está dado por las ecuaciones (2-42) y (2-43) . Elalgoritmopropuesto es:Paso l. Calcúlese A' = cose A y Ay = sene A y almacénese en las memorias 5 y 6 .Paso 2. Calcúlese P = cxA' - cyA x y almacénese en la memoria 13.Paso 3. Calcúlese Q = V B2 - p2 Y almacénese en la memoria 14.Paso 4. Calcúlese A = cx A x + cy Ay ::¡: Q y almacénese en la memoria 7 .
Paso 5. Calcúlese B X = pAy ± QAx y almacénese en la memoria 9.Paso 6. Calcúlese BY = -pAx ± QAy y almacénese en la memoria 10.Paso 7. Multiplíquese el contenido de las memorias 5 y 6 por A .Paso 8. Calcúlese eB = tan -1 (BY! BX); utilícense los signos de BX y BY para dar elcuadrantecorrecto; y almacénese en la memoria 12.Paso 9. Alto.Como se analizó en la sección 2-7, existen dos soluciones para el caso 2b; las que aparecen comolos diferentes signos en los pasos 4 a 6. Se recomienda escribir dos programas por separado, unollamado caso 2b usando los signos superiores, y el otro llamado caso 2b' con lossignos inferiores.
Los programas se pueden comprobar aplicando los datos que se dan a continuación: cx = -15,cy = -8.661, ;eA = -600, y B = 20, almacenados, respectivamente, en las memorias

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 211/508
1,2,8 Y 11.En tal caso, el programa 2b debe dar los resultados redondeados AX = -5.000, AY= 8.661, A =-1"0.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 212/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁTICO 189ben ser N 5.000, AY = -8.661, A 10..000, BX = -20.000, BY 0.000, Y (IR"" 180..000°.Estos se deben almacenar en las memorias 5, 6, 7, 9, 10 Y 12, respectivamente.Ejemplo 5-7 Desarróllese un algoritmo para resolver el caso 2e de la ecuación (5-1),siendo 8A y
88 las incógnitas. Supóngase que los datos que corresponden a ex, e', A, y B ya estánalmacenadosen las memorias 1, 2, 9 y 12, respectivamente.SOLUCIÓN La solución para el caso 2e está dada en las ecuaciones (2-44) y (2-45). El algoritmopropuesto es:Paso l. Calcúlese P (A' B2 + e2)/2e2 y almacénese en la memoria 13.Paso 2. Calcúlese Q Y(A/ef - p2 Y almacénese en la memoria 14.Paso 3. Calcúlese A' = pe' OC' y almacénese en la memoria 5.Paso 4. Calcúlese AY = Pe' :¡: Qex y almacénese en la memoria 6.Paso 5. Calcúlese 8A = tan..1 (AY/A'); úsense los signos de AX y AY para dar el cuadrante correcto;
y almacénese en la memoria 8.Paso 6. Calcúlese R 1 - P y almacénese en la memoria 13.Paso 7. Calcúlese Bx Rex :¡: OC"' y almacénese en la memoria 9.Paso 8. Calcúlese BY Re' ± OCX y almacénese en la memoria 10.Paso 9. Calcúlese 8B tan-I (BY/BX); úsense los signos de BX y BY para dar el cuadrante correcto;y almacénese en la memoria 12.Paso JO. Alto.Como sucede en el caso 2b, el caso 2e cuenta con dos soluciones y requiere de dos programaspor separado. Uno de ellos, el que utilice los signos superiores de los pasos 3,4, 7 y'8, puede llamarseprograma 2e; y el otro, el de los signos inferiores, puede denominarse programa
2e.Los dos programas se pueden comprobar con los siguientes' datos: ex 15, C' = - 8.661,A 10, Y B = 20, almacenados en las memorias 1, 2,7 Y 11, respectivamente. Luego,el programa2edebe dar AX = -5.000, AY 8.661,: eA '" 120.000°, BX 17.321, y ()H = 240.000°. Los resultadosdel programa 2e' deben ser AX = 5.000, AY = -8.661, eA = -60.000°, B' - 20.000,BY = 0.000, Y 8s 180.000°. Todo esto se debe almacenar en las memorias 5, 6, 8, 9,10 Y 12, respectivamente.Los programas desarrollados en estos cuatro ejemplos pueden resultar bastante
beneficiosos al realizar la solución de posición de la mayor parte de los mecanismos planos. Los procedimientos para analizar su velocidad y su aceleración, con elmétodo de Chace, se explicaron en las secciones 3-9 y 4-8 . También resulta útilcontar con programas comprobados con anterioridad a fin de evaluar operacionesvectoriales como k x A, A· B, y (k x A) . (k x B) y un programa para resolver dosecuaciones simultáneas lineales con dos incógnitas. Con éstas, se pueden aplicar losmétodos de las secciones 3-9 y 4-8 en forma d irecta y evaluarse con gran rapidezenuna calculadora.Aunque en esta sección se ha reforzado el método de Chace, es fácil ver cómose podrían desarrollar programas paralelos usando álgebra compleja y el métodode Raven. De hecho, una vez programados, existen muy pocas diferencias entre los
métodos y se pueden entremezclar con toda libertad. Su principal diferencia esfundamentalmente de notación y preferencia del usuario. Por ejemplo, en el curso

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 213/508
de los cálculos, AX y AV, desempeñan el papel de las componentes de un vector enel método de Chace, o de las partes real e imaginaria de un número complejo, en elmétodo de Raven.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 214/508
190 TEORÍA DE MÁQUINAS Y MECANISMOSPor supuesto, en el caso de mecanismos tridimensionales, los algoritmos anterioresrinden pocos beneficios y se deben generalizar. Es factible desarrollarprocedimientos exactamente paralelos para tres dimensiones en el capitulo 11; sin
embargo , los c álculos relativos son necesariamente más complejos y, por lo común,van más allá de la capacidad de una calculadora programable . Sin embargo,se pueden aplicar algoritmos similares en una computadora digital, en la que las memorias son más grandes.Para quienes prefieren trabajar con una computadora digital en lugar de unacalculadora, los cuatro algoritmos anteriores se pueden programar directamentecomo se expresaron , en un lenguaje como el FORTRAN o el BASIC. Las memoriasmencionadas se sustituirían con nombres de variables como A, AX,THET AB, Y así sucesivamente. Se recomienda que cada algoritmo se programecomo un procedimiento por separado para usarse dentro de un programa principalde mayor amplitud, escrito para cada problema. Por ejemplo, al usar FORTRAN,
el caso 2a se podría programar como una SUBROUTINE:SUBROUTlNE CASE 2A (CX, CY, THETAA, THETAB, A, B)Esto permitiría que se pidiera a partir de un programa FORTRAN principal, asignandolos valores específicos .CALL CASE 2A (-15.0, -8.661, -60.0,180.0, A , B )y los valores A y B se retornarían bajo esos dos nombres d e variables. Entoncescada aplicación requeriría escribir un programa principal para adaptarlo al problema particular. Sin embargo , el esfuerzo se reduciría notablemente puesto que sedispondría en una biblioteca de subprogramas precomprobados y se podrian usarcon la misma facilidad con que se emplea un cálculo SIN o COSo54 PROGRAMA DE COMPUTADORA PARA
MECANISMOS PLANOSConforme aumenta la necesidad de i ntroducir más características en un programa,pronto se sobrepasa la capacidad de una calculadora programable, y es precisorecurrir a una computadora digital. Sin embargo , no siempre se tiene acceso a unacomputadora y. con frecuencia, tiene un costo asociado con su uso. Por consiguiente,conviene usar la calculadora siempre que sea posible. No obstante, graciasa su mayor potencial, a menudo se tiene la justificación suficiente como paraameritar la utilización de una computadora. Del mismo .nodo, cuando se programapara una computadora en lugar de para una calculadora, se debe tratar deaprovechar todas sus capacidades al grado máximo posible para que el uso del
programa sea más conveniente, más flexible, más poderoso, de comprensión másrápida, etc. El esfuerzo y el costo asociados con la programación para una computadorasuelen ser más altos que en el caso de la calculadora; pero se justificanpor los ahorros que se obtienen en su uso reiterado.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 215/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁ TICO 191Por supuesto, todos los algoritmos desarrollados h asta ahora en este capítulose pudieron programar para una computadora digital; pero, por su naturaleza, son quizá más adecuados para una calculadora. Se trata de programas pequeños cuyotamaño se restringió intencionalmente para una calculadora; y dejan también una
cantidad sustancial de análisis al usuario. Son algoritmos para efectuar pequeñoscálculos específicos, o sea, la automatización de c ierto número de los pequeñospasos que se presentan con frecuencia al analizar un mecanismo. No se trata de algoritmospara analizar en forma total un eslabonamiento completo, como podríahacerse en una computadora. En esta sección se estudiará un algoritmo adecuadopara el análisis cinemático de todos los eslabonamientos planos, en un solo programa.Al considerar la programación en una computadora digital, también se debetener presente que el algoritmo, es decir, el procedimiento de análisis, debe serapropiado para la capacidad de la computadora, no del usuario, aun cuando la entrada
y la salida deben ser apropiados para este último. Con frecuencia se encuentraque el procedimiento más directo para la solución a mano no es la másapropiada para una computadora; tal es el caso del algoritmo que se explica a continuación,que depende de la iteración numérica más que de la solución algebraicade la ecuación de posición.Para hacer más comprensible la técnica de análisis, se explicará en términosdel problema ejemplo ilustrado en la figura 5-3; pero es preciso tener presentea lolargo de todo el desarrollo, que lo que se pretende es un procedimiento generalyun sol o programa.En el caso del problema ilustrado en la figura 5-3, la ecuación de cierre del
circuito se puede escribir como(a)en donde el significado del símbolo E quedará aclarado conforme se avance. Expresada en forma compleja polar, toma la formay, en el c aso del problema general con n vectores, esnE= L ± f¡ejlJ¡ =0;=1(b)(5-2)Figura 5-3 Mecanismo invertido de corredera
y manivela.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 216/508
192 TEORíA DE MÁQUINAS Y MECANISMOSNo es dificil escribir un subprograma para evaluar la ecuación de cierre delcircuito para cualquier mecanismo en particular . Para el ejemplo, recurriendo alFORTRAN, el subprograma se podría escribirSUBROUTINE LOOPEQ (LOOP)
COMPLEX LOOP (1), RLOOP (1) = R(1) + R(3) + R(4) - R(2)RETURNENDEsta subrutina emplea otro subprograma FORTRAN denominado R, que se describe a continuación, el cual evaluará un vector expresado en la forma complejapolar dados su longitud y su ángulo. Después de evaluar y sumar cada uno de losvectores, la subrutina LOOPEQ proporciona el resultado, que es E de la (b), en lavariable compleja denominada LOOP (l). En el caso general , un problema podríatener varias ecuaciones de cierre del circuito que se programarían como LOOP(l),LOOP(2) y así sucesivamente , en la subrutina LOOPEQ.
En general, las velocidades y las aceleraciones se obtendrán a partir de lasderivadas respecto al tiempo de la ecuación de cierre del circuito, Según la ecuación(5-2), éstas sonnÉ }: ± (f¡eiO¡ + jÓ¡r¡eiO¡) = Oi=1nE ? ± (r¡ei8; + j2Ó;f¡ei/J¡ + jii¡r¡eill¡ - Ó¡r¡eil1;) 1=1que, en el caso de este ejemplo , se convierten en(5-3)(5-4)É = t .. eilJ4 + jÓ4r4(l4 jÓ2r2eilJ.¿ = O (e)E = r .. elB + j2fM'4e/84 + j94r4ej84 - tHr4ej/J4 - j92r2ejlJ.¿ + Ó..r2ejlJ.¿ = O (d)
en donde se dan Óz y 92 y las incógnitas son 74, Ó4, r4 y 9 ..Ahora, en lugar de reprogramar estas expresiones para cada problema nuevo,aprovechemos la subrutina LOOPEQ. Definamos el subprograma R de tal modoque cuando un c ierto valor, llamado LEVEL se haga igualO, 1 ó 2, la función Rcalcule la expresión apropiada de posición , velocidad o aceleración, respectivamente. En FORTRAN, el subprograma funcional R podría tener la secuencia de lasiguiente forma:COMPLEX FUNCTION R(I)COMMON LEVEL,RM(20),RA(20),DRM(20),DRA(20),DDRM(20),DDRA(20)COMPLEX Z,CMPLX,CEXP
IF(LEVEL.. 1)1,2,3Z = CMPLX(RM(I),O.O)GO T04

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 217/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁ TICO 1932 Z = CMPLX(DRM(I), DRA(I)*RM(I)GO T043 Z = CMPLX(DDRM(I)..RM(I)*DRA(I)**2, &2.0*DRA(I)*DRM(I) + DDRA(I)*RM(I))4 R = Z*CEXP(CMPLX(O.O,RA(I)))
RETURNENDCuando se use este subprograma para R, supongamos que ya se han calculadolos datos apropiados para los valores de l as magnitudes RM y los ángulos RA detodos los vectores, y para sus primeras derivadas DRM y DRA, Y sus segundasderivadas DDRM y DDRA, con respecto al tiempo. Nótese en la proposiciónCOMMON antes citada, que se han reservado espacios de memoria pára 20 vectores,aun cuando en este ejemplo sólo se usan 4. Cada vez que se pide la funciónR de la subrutina LOOPEQ, se suministra a R un número de vector 1 a R y seevalúa la expresión apropiada de posición, velocidad ° aceleración, dependiendodel valor de LEVEL. En este caso, cuando LEVEL = 0, la subrutina LOOPEQevaluará LOOP(l) como E de la e cuación (b); pero cuando LEVEL 1 o
LEVEL = 2, la subrutina LOOPEQ evaluará LOOP(l) como E o ti de la ecuación (e)o (el), respectivamente. En todos los casos, s i los datos son exactos, el resultadodebe ser LOOP(l) = O.Se podría poner en tela de juicio el propósito de calcular LOOP(l) si siemprees cero para datos correctos; pero esto es precisamente lo importante; s i los datosno satisfacen exactamente la condición de cierre del circuito, ecuación (b),LOOP(I) o tE contendrán una evaluación numérica del error, y se pueden usarpara ajustar numéricamente los datos hasta que sea correcta.Supóngase que se escribe un programa principal que principia por leer las longitudesy los ángulos de todos los vectores en alguna posición inicial del eslabonamiento.
Estos datos se medirían en un dibujo, se llevarían al programa principaly almacenarían en las disposiciones RM(20) y RA(20} de COMMON, de acuerdocon sus números de vector . Por supuesto, los datos para RM(1), RM(2), RM(3),RA(l) Y RA(3) se deben medir con exactitud puesto que representan dimensionesfijas del eslabonamiento . El ángulo RA(2) representa el ángulo de entrada de lamanivela. RM(4) y RA(4} representan cantidades variables que se deben calcularpor medio del programa, y sólo se necesitan valores aproximados de ellas. Supongamosque existe alg ún error desconocido asociado con cada una de estas . Entonces, los valores exactos '4 y 04, sonr4 = r4 + or04= 1)4+064
en donde or4 y ol)4fepresentan los errores.(e)(f)Puesto que se dispone de datos para todas las variables RM y RA, se podríacitar el subprograma LOOPEQ , pero daría por resultado LOOP(l) con un valordiferente de cero de E. Si la ecuación (b) se desarrolla en una serie de Taylor, se
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 218/508
194 TEORÍA DE MÁQUINAS Y MECANISMOSpuede obtener una aproximación de c ómo este error en el cierre E está relacionadocon or4 Y 004 Suprimiendo los términos orden superior, aplicando la ecuación (b) y reordenandose obtiene(g)
Esta es una ecuación compleja, con partes real e imaginaria y, por ende, se resuelvepara los dos errores desconocidos lir4 y li04 A continuación, estos se puedensumar a r4 y 04 Y el procedimiento se puede repetir hasta que los errores converjana un valor dentro de una tolerancia aceptable. En ese momento, los valores exactosde f¡ y ¡¡4 se almacenarán en RM(4) y RA(4). Este procedimiento recibe el nombrede método de interación de Newton-Raphson. t Para el eslabonamiento general, l aecuación d e iteración s e encuentra mediante un desarrollo d e l a ecuación (5-2) enserie de Taylor',n 2: ± (eje;) [jr¡ + ür¡ei9¡) oOj = - E
i=1(5-5)en donde todos los 5r; y [jO¡ son cero, excepto los correspondientes a las variablesdependientes. Puesto que siempre se tiene el doble de variables dependientes quedeecuaciones de cierre del circuito, se contará con el mismo número de ecuaciones ytérminos desconocidos de error. Las ecuaciones son lineales en los términos deerror y se pueden resolver mediante un programa de inversión de matrices, disponibleen la mayor parte de las bibliotecas de programas estándar para computadorasdigitales.Es muy probable que el lector objete con justa razón que se necesita una gran
cantidad de programación especial para formar los coeficientes de la (g), y que la forma de estos coeficientes cambia para cada problema nuevo, contraviniendo asila meta propuesta de escribir un programa general. No obstante, se puede evitaresto aplicando un método debido a Wengert. tt Supóngase que se igualan a cero losdatos de velocidad DRM y DRA, que representan a ;¡ y Ó¡, para todos los vectores.Luego, supóngase que DRM(4), que representa a '4, se iguala a 1 . Si se empleanestos datos para las velocidades, aunque no sean correctos, una comprobación dela ecuación (e) mostrará que se obtienet J. J. Uicker, Jr., y otros, HAn lnterative Method for the Displacement Analysis of Spatial Linkages",J, Appl, Mech" vol. 31, ASME Trans., vol. 86, series E., pp. 309-314; 1964.
tt R. E. Wengert, HA Simple Automatic Derivative Evaluation Program", Commun, ACM; vol. 7,no. 8, pp, 463-464, 1964.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 219/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMA TICO 195Del mismo modo , si todas las velocidades se hacen igual a cero , excepto DRA(4) 84 1 , entoncesSi se generaliza esto, se observará que al hacer iguales a cero todos los datos de
velocidad, entonces igualando a la unidad la velocidad de cualquiera de las variablesdependientes y enseguida se pide la subrutina LOOPEQ con LEVEL = 1 ,se podrán obtener precisamente los vectores correctos en la variable LOOP , loscuales se necesitan como los coeficientes de la ecuación de iteración (5-5) para lacolumna de la matriz correspondiente a ese término de error de la variable dependiente.Por lo tanto, al pedir el subprograma LOOPEQ una vez para cada variabledependiente , se puede desarrollar la matriz de los coeficientes de la (5-5) sincodificacióndependiente del problema especializado. Regresando LEVEL a cero,pidiendo una vez más LOOPEQ se producirá la negativa de la columna de constantes
del segundo miembro de la ecuación (5-5) . A continuación se pueden resolverlas ecuaciones por inversión de matrices, aplicando un subprograma estándartomado de la biblioteca de la computadora.Una vez que converge el procedimiento de iteración antes explicado , estocompleta el análisis de posición para la posición presente de entrada de la manivela.Ahora deben considerarse los análisis de velocidad y aceleración. Reacomodandolas ecuaciones (e) y (d) se p ueden poner a la izquierda los términos desconocidos,y los términos conocidos se colocan a la derecha, obteniéndose(ei84)t4 + (jr4ei84) 84 = - (- jÓ2r2ej..) (h)(ei84)f4 + (jr4ei84)84 = - (- j82r2ei/J:¡ + é..r2ei/J:¡ + j2Ó4t4ei94 - lHr4ei84) (i)Nótese que los coeficientes del primer miembro de estas ecuaciones son idénticosa los de la (g); de hecho, se encontrará que esto siempre sucede así. Por consiguien
te,l os análisis de velocidad y aceleración pueden emplear la misma matrizinversa hallada para resolver la ecuación (g), para los errores de posición. Todo lo que se necesita para los análisis de posición y velocidad son las columnas apropiadasde constantes para las ecuaciones (h) e (1). Al igual que antes, éstas se encuentranmediante la aplicación juiciosa de la subrutina LOOPEQ.Después de igualar todas las velocidades a cero, regresar la velocidad de entrada82 a su valor apropiado y hacer LEVEL 1 , una petición de LOOPEQproducirá la negativa de la columna de constantes para las ecuaciones de velocidad
(h) . Con los signos invertidos, estas constantes se pueden multiplicar por la matrizinversa almacenada, para dar los valores de las velocidades dependientes desconocidast4 y é4 Una vez concluido esto, se puede hacer lo mismo para el análisisde aceleración. Después de igualar todas las aceleraciones a cero, regresar laaceleración de entrada 82 a su valor apropiado y hacer LEVEL = 2, una peticiónde LOOPEQ producirá la negativa de la columna de constantes de las ecuacionesde aceleración (1) . Al invertir los signos, también se pueden multiplicar e stas cons-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 220/508
196 TEORtA DE MÁQUINAS Y MECANISMOStan tes por la misma matriz inversa almacenada, para dar los valores de las aceleracionesdependientes desconocidas, r4 y 04 El análisis queda así concluido paraesta posición del mecanismo y se pueden imprimir los resultados .Procediendo a analizar la siguiente posició n , se puede incrementar el ángulo
de entrada de la manivela ()2 en !l (}z y se usan los datos de la última posición comoestimaciones iniciales para la siguiente, al repetir el proceso de iteración .Repasemos el proceso una vez más estableciendo los pasos del algoritmo en elorden apropiado para la programación. Suponiendo que el programa estuviera enFORTRAN, se iniciaría definiendo las configuraciones de almacenamiento de losdatos. Estas incluyen una proposición COMMON similar a la de la función R, asícomo las configuraciones para la matriz de los coeficientes, la columna de constantesy su producto. Si se diseña el programa para máximos de, por ejemplo, 20vectores con 1 0 variables dependientes (cinco circuitos) y una variable de entrada,
el almacenamiento de los datos iniciales se podría definir mediante las proposicionesCOMMON LEVEL,RM(20),RA(20),DRM(20),DRA(20),DDRM(20),DDRA(20)DIMENSION COEFF( 1 0, 1 O),CONST( ] O),PROD( 1 O)El programa principal se escribiría según el algoritmo siguiente :Paso 1 . Póngase ceros en todas las configuraciones.Paso 2. Recíbanse los datos para el número de vectores, el de circuitos y losnúmeros y tipos (longitud o ángulo de los vectores) de las variables dependientes y la variable de entrada.Paso 3. Recíbanse los datos para las magnitudes y los ángulos RM(I) y RA(I) detodos los vectores.Paso 4. Recíbanse los datos para el i ncremento de la variable de entrada, la posición
final, la velocidad de entrada y la aceleración de entrada.Paso 5. Imprímanse todos los datos de entrada. Si el programa es i nteractivo, permítaseque los usuarios modifiquen cualquier dato que deseen cambiar.Paso 6. Conviértanse todos los ángulos a radianes .Paso 7. Establézcase un contador de iteraciones, ITER = O.Paso 8. Hágase LEVEL = O Y CALL LOo,pEQ(CONST).Paso 9. Hágase LEVEL = 1 Y J = l .Paso 10. Iguálense a cero todas las velocidades, DRM(I) y DRA(I ) .Paso 1 1. Hágase la velocidad apropiada, D R M o DRA, igual a 1 para l a J-ésimavariable dependiente.Paso 12. CALL LOOPEQ(COEFF(J,l» para calcular la J-ésima columna de la
matriz de los coeficientes de la ecuación (5-5).Paso 13. Increméntese J y repítanse los pasos 1 0 a 1 2 para c ada variable dependientesucesivamente.Paso 14. Utilícese un subprograma de biblioteca para invertir la matriz COEFF.Paso 15. Compruébense las dificultades posibles (determinante cero) durante la
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 221/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁTICO 197inversión matricial del paso 14. Si el determinante es cero, imprímase el mensajeapropiado y hacer alto.Paso 16. Hágase LEVEL O Y CALL LOOPEQ(CONST) .Paso 1 7. Premultiplíquese la columna CONST por la matriz inversa COEFF paraformar la columna PROD de errores negativos - 8r¡ y - 88¡.
Paso 18. Fórmense los valores corregidos de posición ri + 5T¡ Y 8; + 5(J¡ para todaslas variables dependientes.Paso 19. Si el contador de iteraciones ITER es mayor que 10, ímprímase un mensajeadecuado y hacer alto.Paso 20. Si c ualquiera de los e rrores 8r¡ y 80¡ es mayor que una tolerancia aceptablementepequeña , increméntese ITER en 1 y regrésese al paso 1 0.Paso 21. Póngase ceros en las configuraciones de velocidad, DRM(I) y DRA(I).Luego, introdúzcase el valor de la velocidad de entrada en la variable apropiada.Paso 22. Hágase LEVEL = 1 y CALL LOOPEQ(CONST) .Paso 23. Premultiplíquese la columna CONST por la matriz inversa COEFF paraformar la columna PROD de velocidades negativas - Ti Y - (j¡>
Paso 24. lnviértanse los s ignos de las velocidades del paso 23 y almacénense en laDRM o DRA apropiada, para cada variable dependiente.Paso 25. Póngase ceros en las configuraciones de aceleración , DDRM(I) yDDRA(I) . A continuación , introdúzcase la aceleración de entrada en la variableapropiada.Paso 26. Hágase LEVEL = 2 Y CALL LOOPEQ(CONST) .Paso 2 7. Premultiplíquese la columna CONST por la matriz inversa COEFF paraformar la columna PROD de aceleraciones negativas - r¡ y -8;.Paso 28. Inviértanse los s ignos de las aceleraciones del paso 27 y almacénese en la DDRM o DDRA apropiada para cada variable dependiente .Paso 29. I mprímanse las posiciones (con los ángulos expresados en grados) , lasvelocidades y las aceleraciones de todas las variables dependientes.
Paso 30. Si la variable de entrada no ha alcanzado aún la posición final , súmese elincremento de la variable de entrada y regrésese al paso 7 .Paso 31. Si e s interactiva, pregúntese al usuario si desea continuar. D e ser así,regrésese al paso 5 .Paso 32. Alto .A quienes han empleado métodos iterativos en otros campos, les pareceráquizá que un programa de esta indole sería terriblemente ineficiente, que requiereun gran número de iteraciones para lograr la convergencia. Sin embargo, en elanálisis cinemático , este no es el caso. La experiencia con una amplia variedad deproblemas , ha demostrado que, por lo común, bastan tres o cuatro iteracionespara resolver las ecuaciones de cierre del circuito incluso de eslabonamientos muy
complicados, con una exactitud mayor que las tolerancias de maquinado de lasdimensiones de los eslabones . Aunque la convergencia es lenta en posiciones con

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 222/508
198 TEORÍA DE MÁQUINAS Y MECANISMOS'ventajas mecánicas baj as , jamás se requieren más de cinco iteraciones. Por consiguiente,la prueba del paso 19 nunca se debe satisfacer, a menos que se hayandado datos no válidos para las dimensiones de los eslabones, o se haya llegado auna posición de centro muerto (véase a continuación) o bien, se tomen pasos extremadam
entegrandes entre posiciones.Otra de las preocupaciones podría ser que el proceso de iteración pudiera noconverger a una solución, si cualquiera de las estimaciones iniciales de las variablesdependientes tiene un error sustancial , o los incrementos entre posiciones sontangrandes que los valores de la última no resultan ser estimaciones iniciales razonablespara la siguiente. Una vez más , la experiencia no demuestra que estaspreocupaciones sean válidas. Los valores iniciales de las variables dependientes se
pueden estimar sin necesidad de hacer mediciones, y los cambios en el ángulo deentrada de la manivela del orden de 45 a 60° no generan problemas por lo que respectaa la convergencia.En el análisis cinemático, el esquema de iteración antes mencionado es muyeficiente y sólo tiene una fuente potencial de dificultad; cuando la matriz de los coeficientes tiene un determinante de cero o cercano a cero, lo que causa problemasen el cálculo de su inversa. Como se indica en el paso 1 5 , esto hará que elprograma se detenga; sin embargo, al analizar mecanismos diseñados para máquinasreales, esta es una indicación de una dificultad mecánica con el propio dispositivo;
se encuentra en una posición de centro muerto o cercano a él . Se puededemostrar esto recurriendo a la ecuación (5-3) ; si la matriz tiene un determinantede cero, no existe solución finita para las velocidades dependientes, o sea, la definiciónde posición de centro muerto (véase la sección 3-16) .Algunos estudiantes de l a Universidad de Wisconsin escribieron un programadenominado KAPCA t , utilizando el algoritmo descrito con anterioridad y que haresultado sumamente eficiente y fácil de usar . El programa se ha ampliado paraproducir una imagen del mecanismo en una pantalla para gráficas de computadora,y en la figura 5-4 se muestran algunas fotografías tomadas de tales imágenes .Sin importar la antigüedad de la computadora en la cual se opere, la velocidad de
los cálculos del algoritmo anterior , aunque iterativos, es lo suficientemente rápidacomo para presentar el mecanismo en movimiento. Como se ilustra en la figura 5-4, el programa también está equipado para trazar la gráficª-gel lugar geométricode los puntos en movimiento, facilitando con ello la presentación en la pantalla decurvas del acoplador. Sentándose ante la consola, observando esa presentación, alterandolas dimensiones de los eslabones y llevando a cabo el análisis una vez más,el usuario puede diseñar con rapidez un mecanismo que cuente con las propiedadescinemáticas deseadas.El único inconveniente del algoritmo anterior es que el usuario debe escribirun nuevo subprograma LOOPEQ para cada nuevo tipo de mecanismo que va a
t El Programa de Análisis Cinemático Utilizando el Álgebra Compleja (Kinematics AnalysisProgram Using Complex A Igebra, KAPCA) fue escrito por R . A . Lund y O. Hanson,

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 223/508
y las mejoras yampliaciones corrieron a cargo de L .T. Suong, C. R . Kishline y R. Lozano.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 224/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMÁ TICO 199(al (bl(e )(dIFigura 5-4 Ej emplos de eslabonamientos analizados con el programa KAPCA: a) Mecanismo de corredera
y manivela, mostrando 108 vectores velocidad y aceleración para el pistón (presentados de izquierdaa derecha); b) eslabonamiento de cuatro barras con tres de sus curvas del acoplador trazadas; e)mecanismo de Peaucellier, mostrando la curva rectilinea del acoplador; d) mecanismo de un vehículoelevador de horquilla en su posición abatida.analizar . Aunque esto requiere cierto conocimiento limitado del FORTRAN, es untrabajo fácil de realizar, como lo demuestra el ejemplo previo. Asimismo, una vezque se escriben unos cuantos subprogramas básicos (uno para un eslabonamientode cuatro barras, 000 para un mecanismo de corredera y manivela, y así sucesivamente)
, se encuentra que muchos mecanismos planos son variaciones de uno deellos, difiriendo sólo en las dimensiones o en la elección de los eslabones de entraday salida.5-5 PROGRAMAS GENERALIZADOS PARA ANÁLISISDE MECANISMOSComo lo sugiere el programa descrito en la sección anterior, conviene desarrollarprogramas generales par a computadora con intervalos de aplicación muy amplios ,para que se puedan justificar los costos de desarrollo a través del uso repetido.Asimismo , cada programa para computadora requiere de cierto estudio inicial y desu experimentación a tanteos por parte del usuario, antes de que se puedanaprovechar plenamente todas sus c apacidades; los programas generales necesitan

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 225/508
200 mORtA DE MÁQUINAS Y MECANISMOSmenos tiempo y costo para su aprendizaje que usar un programa diferente paracada nüevo problema .Aunque puede parecer que el programa KAPCA de la sección anterior tieneun amplio intervalo de aplicación , todavia tiene fuertes limitaciones, que rápidamente
restringen su utilidad en una situación verdadera de diseño industrial. Esprobable que la limitación más severa del KAPCA sea su incapacidad para efectuarun análisis de fuerza del mecanismo que se está estudiando .El primer programa general ampliamente difundido para analizar mecanismos,fue el KAM (Kinematic A nalysis Method, Método de Análisis Cinemático) queescribió y distribuyó la I BM . Éste incluía las capacidades necesarias para efectuaranálisis de posición, velocidad, aceleración y fuerza, tanto para mecanismos planoscomo espaciales , y se desarrolló en torno a las soluciones del tetraedro vectorial deChace (Cap. 1 1) . Este programa, que se hizo público por vez primera en 1 964,constituyó un logro sobresaliente, siendo el primero en reconocer la necesidad deun programa general para sis temas mecánicos que exhiban grandes cambios
geométricos. Sin embargo, por ser el primero, tuvo ciertas limitaciones que ahorahan sido superadas por los programas modernos y más poderosos que se describena continuación.También se han desarrollado poderosos programas generalizados aplicandométodos de elementos finitos, el NASTRAN y el ANSYS son dos ejemplos. Estosprogramas se han desarrollado primordialmente para el análisis de esfuerzos y, por end.., poseen capacidades excelentes tanto para analizar fuerzas estáticas comodinámicas de los sistemas mecánicos . También admiten que los eslabones de unmecanismo simulado se deflexionen bajo cargas y son capaces de resolver problemasde fuerzas estáticamente indeterminadas. Son programas de gran capacidady con amplia aplicación en la industria . Aunque en ocasiones se usan para analiza
rmecanismos, están limitados por su incapacidad para simular los grandes cambiosgeométricos que caracterizan a los sistemas cinemáticos.Hay cuatro grandes programas generalizados para computadora para el usopúblico general, que se dedican al tipo de problemas que se analizaron en este texto.t Los nombres de estos cuatro r.-:,ogramas son KINSYN, DRAM, ADAMS eIMP.El K INSYN e s el único programa generalizado del que se dispone hoy en día,dirigido fundamentalmente a la síntesis cinemática. Se enfoca a la síntesis de loseslabonamientos planos, aplicando métodos análogos a los descritos en el capítulo10. Este programa fue desarrollado por Kaufman en el Instituto de Tecnología de
Massachusetts .El modo primario de comunicación entre el KINSYN y el usuario es gráfico.Los usuarios introducen los datos que describen sus requisitos de movimiento con una pluma electrónica sobre una tablilla también electrónica de datos; la computadorarecibe el esquema y proporciona la información de diseño solicitada ent R. E. Kaufman, "Mechanism Design by Computer" , Mach. Des., vol. 56, no. 24, pp. 94-100,1978.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 226/508
MÉTODOS NUMÉRICOS EN EL ANÁLISIS CINEMA TICO 201Figura 5-5 Ejemplo de diseño de un eslabonamiento. Este mecanismo de sujeción de tubería fue diseñadoen unos 15 minutos, aproximadamente, utilizando el KINSYN 111. El KINSYN III fuedesarrolladoen la Joint Computer Facility (Instalaciones conjuntas de computación) del Institu
to de Tecnologíade Massachusetts, bajo la dirección de Roger E. Kaufman, que actualmente funge comoprofesor de ingeniería en la Universidad George Washington. (Por cortesía del profesar Roger E. Kaufman.)una pantalla de presentación gráfica. Los usuarios pueden obtener una buena sensaciónintuitiva respecto a la calidad de su diseño, observando su imagen animadaen la pantalla de presentación. A partir de esta animación p ueden desarrollarjuicios concernientes a holguras, velocidades o fuerzas. En la figura 5-5 se ilustraun ej emplo de aplicación del KINSYN sobre una pantalla de presentación gráfica.
El programa DRAM , que significa Respuesta Dinámica de Maquinaria Articulada(Dynamic Response of A rticulated Machinery), es un programa generalizadopara el análisis cinemático y dinámico de mecanismos planos. Fue desarrolladopor Chace en la Universidad de Michigan. Se puede usar el DRAM inclusopara simular mecanismos planos de extrema complejidad, y proporcionar análisisde posición , velocidad, ac eleración y fuerzas estáticas o dinámicas . El programa esinteractivo y el usuario se comunica con él recurriendo al lenguaj e especial DRAM orientado a problemas, ya sea por teletipo o mediante una terminal de presentación gráfica. El programa cuenta con recursos especiales para manejar el impactoentre piezas, así como una gran variedad de efectos de fricción.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 227/508
202 TEORIA DE MÁQUINAS Y MECANISMOS-22-400-200Desp lazamiento vertical
del brazo d e l a rótu la3..---------------Carga vertical de la horquillaO.+-.T-.......200400 L-.. _______ Carga del amortiguador-500500 L-________ FIgura 5-6 Ejemplo de medio sistema de suspensión delantera automotriz, simulado tanto con elprograma ADAMS como con el IPM. Las gráficas muestran la comparación de los datos experimentales
de prueba (curvas continuas) y los resultados de la simulación numérica (curvas a trazos), cuandola suspensión pasa por un bache de una pulgada de profundidad. Las unidades de lasgráficas son pulgadasy libras, en los ejes verticales, contra el del tiempo en segundos, en los ejeshorizontales. (Universidadde Wisconsin, Madison, Wisconsin, y Mechanical Dynamics, Inc., A n n A rbor, Michigan. )El programa ADAMS, que significa Análisis Dinámico Automático de SistemasMecánicos (A u toma tic Dynamic A nalysis 01 Mechanical Sys tems) , fue desarrolladotambién por Chace en la Universidad de Michigan. Al igual que el DRAM, su objetivo
es el análisis cinemática, e stático o dinámico de sistemas mecánicos . No obstante,permite simular sistemas b idimensionales y tridimensionales.El IMP , Programa Integrado para Mecanismos (In tegrated MechanismsProgram) , fue desarrollado por Uicker en la Universidad de Wisconsin . Tambiénse puede emplear para simular sistemas planos o espaciales y proporcionar análisis dnemáticos, estáticos o dinámicos .Aunque desde el punto de vista interno son muy diferentes , el IMP y elADAMS son comparables desde el punto de vista del usuario; ambos tienen lacapacidad de simular incluso complejos sistemas tridimensionales de cuerpos rígidosy proporcionar una amplia gama de análisis, incluyendo posiciones, velocidades,
aceleraciones y fuerzas estáticas y dinámicas . Cada uno de ellos usa supropio lenguaje orientado a problemas , para los datos de entrada, y ambos se

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 228/508
MÉTODOS N UMÉRICOS EN EL ANÁLISIS CINEMÁTICa 203pueden emplear ya sea en un medio intermitente, o bien, interactivo. Cualquieradeellos puede simular la historia de un sistema mecánico, que parte de una ciertaconfiguración inicial y se somete a perturbaciones de fuerza o de movimientoconocidas . Asimismo, los dos tienen capacidad para tener salida en pantalla, en
una terminal de presentación gráfica. Una aplicación excelente para cualquiera deestos programas sería la simulación de la suspensión delantera de un automóvil,que se muestra en la figura 5-6. Se ha llevado a c abo la simulación de este mismo problema con ambos programas, y los dos coinciden bien con los datos experimentalesde prueba. tPROBLEMAS5-1 Escríbase u n programa para calculadora o computadora, para el análisit del mecanismo de compásde barras elíptico que se muestra en la figura de esta página. La posición ue partida,
eÍ incremento enla posición y la velocidad (consta nte) del eslabón 4 d eben ser recibidos como d atos, y deben presentarseen la pantalla la posición, la velocidad y la aceleración de los eslabones 2 y 3.5-2 Escríbase un programa para calculadora o computadora, para analizar la posición,la velocidad y laaceleración del eslabón 4 del mecanismo d e yugo escocés ilustrado en la figura. La posición, el incrementoy la velocidad (constante) de la manivela, se deben recibir como datos, y el análisis se continuarásobre el ciclo de operación completo.5-3 Escríbanse y verifíquense los programas para cada uno de los algoritmos de la sección 5-2 .
5-4 Escríbanse y verifíquense los programas para cada uno de los algoritmos de l a sección 5-3.5-5 Escríbase un programa para computadora usando el algoritmo descrito en la sección 5-4.5-6 Hágase una investigación en las bibliotecas y escríbase un i nforme acerca de losprogramas paracomputadora, para el disefio y el análisis de mecanismos. Se puede desarrollar este informe sobre ladescripción de los programas que se mencionaron en la sección 5-5, o bien, i ncluirdescripciones similaresde otros programas.. . - -
t Estas simulaciones se realizaron para el Strain HistoryPrediction Committee (Comité de Prediccióndel Historial de Deformaciones) de la Society of Automotive Engineers (Sociedadde Ingenieros en Automoción).Los datos de vehículo y los resultados experimentales de las pruebas fueron proporcionados porla Chevrolet Engineering Division, General Motors Corporation.o. ".... . -, .. ..-Problema 5-1 Problema 5-2
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 229/508
CAPITULOSIETEENGRANES RECTOS 0 CILtNDRICOSLos engranes se e studian porque la transmision del movimiento rotatorio de un ejea otro se presenta pnkticamente en todas las maquinas imaginables. Los engranes
constituyen uno de los mejores de los diversos medios disponibles para transmitireste movimiento.En Estados Unidos, la tarea de convertir de las unidades inglesas a las del SIpara el disefio y fabricacion de e ngranes, es tan abrumadora, tan compleja y tancostosa que es probable que jamas se logre la conversion completa. Es por esto quela mayor parte del ma terial de este capitulo y el siguiente se presenta en unidadesinglesas usuales en E.U. Los lectores de este libro que vivan en los paises en que se
emplea por completo el SI, debenm complementar el material con copias de suspropias normas.7-1 TERMINOLOGIA Y DEFINICIONESLos engranes rectos sirven para transmitir movimiento rotatorio entre ejes paralelos;por 10 comun son cilindricos y los dientes son rectos y paralelos al eje derotacion.En la figura 7-1 se ilustra la terminologia de los dientes de los engranes, endonde se muestran la mayor parte de las siguientes definiciones:El cfrculo de paso es un circulo teorico sobre el que generalmente se basan todoslos calculos. Los circulos de paso de un par de engranes acoplados son tangentes'
entre 81.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 230/508
H I ..adio del chafllm,ogura -.. IClrculo de holgura JFigura 7·1 Terminologia.ENGRANES RECTOS 0 CILINDRICOS 259L Clrculo de dedendum
El pinon es el mas pequeno de los dos engranes acoplados; el mas grande se llama casi siempre el engrane.EI paso circular Pc es la distancia, en pul gadas, medida sobre el circulo de paso,que va desde un punto sobre uno de los dientes hasta un punto correspondientesobre un diente adyacente.El paso diametral P es el numero de dientes en el engrane par pulgada de diametrode paso. Las unidades del paso diametral son el reciproco de pulgadas. N6teseque en realidad no se puede medir el paso diametral sobre el engrane propiamente
dicho.El modulo m es la raz6n del diametro de paso al ntimero de dientes. La unidad de 10ngitud acosturnbrada es el milimetro. EI m6dulo es el indice del tamano deldiente en el SI, en tanto que el paso diametral s610 se emplea can las unidadescomu.nmente empleadas en Estados Unidos.La cabeza 0 addendum a es la distancia radial entre el borde superior y el circulode paso.La raiz 0 dedendum b es la distancia radial que va del borde inferior hasta el circulode paso.La altura total hI es la surna del addendum y el dedendum.
EI circulo de ho/gura es un circulo tangente al de addendum del engrane acoplado. EIdedendum en un engrane dado excede al addendum del engrane con el que seacopla.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 231/508
260 TEORIA DE MAQUINAS Y MECANISMOSEI juego entre dientes es la cantidad en la que la anchura de un espacio entre dientesexcede al espesor del diente acoplado sobre los circulos de paso.Conviene que el lector se demuestre a s1 mismo a plena satisfacci6n la validezde las siguientes relaciones, que son de gran utilidad:
en dondeNP=dP = paso diametral, dientes por pulgadaN = numero de dientesd = diametro de paso, pulg 0 mmm = modulo, mmp = 7TdC Nm=-dN7Tm
en donde Pc es el paso circular en pulgadas 0 milimetrosPcP = 7T7-2 LEY FUNDAMEN TAL DEL ENGRANAJE(7-1 )(7-2)(7-3)La accion de los dientes acoplados de los engranes, uno sobre otros, para producirun movimiento rotatorio, puede compararse con una leva y su seguidor. Cuando alos perfiles del diente (0 los de la leva y el seguidor) se les da una forma talcomopara que produzcan una razon constante entre las velocidades angulares durante el
endentamiento, se dice que las superficies son conjugadas. Es posible especificarcualquier perfil para un diente y luego encontrar un perfil para el diente que se vaa acoplar 0 entrelazar con el, de tal modo que las superficies sean conjugadas.Unas de estas soluciones es el perJil de involuta que, con unas cuantas excepciones,se utiliza universalmente en los dientes de engranes.La accion de un solo par de dientes acoplados conforme recorren toda unafase de tal accion debe ser tal que la razon de la velocidad angular del engraneimpulsora la del engrane impulsado se mantenga constante. Este es el criterio fundamenta
lque rige la seleccion de los perfiles del diente. Si esto no se cumplierapara el engranaje, se tendrian vibraciones muy serias y problemas de impacto, inclusoa velocidades bajas.En la seccion 3-14 se explic6 que el teorema de la raz6n de las velocidadesangulares afirma que la razon de las velocidades angulares de cualquier mecanismoes inversamente proporcional a los segmentos en los que el polo comun corta lalinea de los centros. En la figura 7-2 se observan dos perfiles que estan en contactoen A; sea el perfil 2 el impulsor y el 3 el impulsado. Una normal a los perfilesen
el punto de contacto A se interseca con l.a linea de los centros 0203 en el centroinstantaneo P.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 232/508
ENGRANES RECTOS 0 CILlNDRICOS 261BFigura 7·2En el engranaje, P recibe el nombre de punto de paso y Be es la linea de accion. S i los radios del punto de paso de los dos perfiles se designan como rz Y r3,
por la ecuaci6n (3-25),(7-4)Esta ecuaci6n se usa con mucha frecuencia para definir la ley del engranaje, lacualafirma que el punto de paso se debe mantener Jijo sobre la linea de los centros. Esto significa que todas las lineas de acci6n de todo punto de contacto instantaneodebe pasar por el pun to de paso. EI prop lema consiste ahora en determinar laforma de las superficies acopladas para satisfacer la ley del engranaje.No se debe presuponer que cualquier forma 0 perfil para el que se pueda encontrar
un conjugado resultara satisfactorio. Aunque se encuentren curvas conjugadas,todavia existen los problemas pnicticos de reproducir estas curvas engrandes cantidades sobre discos en blanco de acero, al igual que en otras clasesdemateriales, y con la maquinaria existente. Ademas, es necesario tomar en cuentalos cambios en los centros de los ejes debidos a alineaciones deficientes y a lasgrandes fuerzas ejercidas. Por ultimo, el perfil de diente seleccionado debe serdetal naturaleza que se pueda reproducir econ6micamente. Una gran parte de estecapitulo se dedica a i lustrar la manera en que el perfil de involuta satisfaceestasnecesidades.
7-3 PROPIEDADES DE LA INVOLUTASi los perfiles de dientes acoplados tienen la forma de curvas involutas, se satisfacela condici6n de que la normal comiIn en todos los puntos de contacto debe pasar

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 233/508
262 TEORIA DE MAQUINAS Y MECANISMOSFigura 7·3por el punto de paso. Una curva involuta es la trayectoria generada por un punto trazador sobre una cuerda, conforme esta se desenrolla de un cilindro denominado
cilindro base. Lo anterior aparece ilustrado en la figura 7-3, en donde T es elpuntotrazador. N6tese que la cuerda AT es normal a la invol uta en T y que la distanciaAT es el valor instantimeo del radio de curvatura. Con forme la involuta se generadesde el origen To hasta Tj, el radio de curvatura varia continuamente; es ceroen3 JFigura 7-4 Acd6n de involuta.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 234/508
ENG RANES RECTOS 0 CILtNDRICOS 263To y dene su mayor valor en Tj_ Por ende, la cuerda es la recta generadora y siemprees normal a la involuta.Exarninemos ahora el perfil de involuta para ver c6mo satisface la necesidadde transmisi6n de movirniento uniforme. En la figura 7-4 en blanco, con centros
fijos Oz Y 030 que tienen cilindros base cuyos radios respectivosson OzA Y 03B. Imaginemos ahora que se arrolla una cuerda en el mismosentido del movimiento de las manecillas del reloj, alrededor del cilindro basedelengrane 2, se tira firmemente de ella entre los puntos A y B y se arrolla en sentidoopuesto al movimiento de las manecillas del reloj, alrededor del cilindro basedel engrane 3. Si se hacen girar los cilindros base en direcciones diferentes,de tal modo que la cuerda se mantenga tensa, un punto T trazara los involutas CD sobre el engrane 2 y EF sobre el engrane 3. Las involutas generadas siq1Ultaneamente
de esta manera por un solo punto trazador se consideran perfiles conjugados.A continuaci6n, imaginemos que las involutas de 1a figura 7-4 se trazan sobreplacas y que estas se cortan a 10 largo de las curvas trazadas, fijandose sobrelos cilindros respectivos en las mismas posiciones. EI resultado es el que se ilustraen la figura 7- 5 . Ahora, se puede eliminar la cuerda y si el engrane 2 se mueve en elmismo sentido del movimiento de las manecillas del reloj, el engrane 3 se veraobligado a moverse en el sentido contrario debido a la acci6n tipo leva de las dosplacas curvas. La trayectoria de contacto sera la recta AB que antes ocupara lacuerda. Dado que la recta AB es la linea generadora de cada involuta, es normala
los dos perfiles en todos los puntos de contacto. Asimismo, siempre ocupa la misrnaposici6n en virtud de que es tangente a los dos cilindros base. Por consiguiente,el punto P es el de paso; no se mueve; y, por tanto, la curva involuta satisfacelaley del engranaje.Antes de conduir esta secci6n, el lector debe observar que un cambio en ladistancia entre los centros, que se podria causar debido a un rnontaje incorrecto,3Figura 7-5

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 235/508
264 TEORIA DE MAQUINAS Y MECANISMOSno tendra efecto sobre la forma de la involuta. Ademas, el punto de paso siguesiendo fijo y Ia ley del engranaje se satisface.7-4 ENGRANES I NTERCAMBIABLES; N ORMAS AGMAUn sistema de dientes es una norma t que especifica las relaciones entre el addendum,
dedendum, altura de trabajo, espesor del diente y angulo de presi6n paralograr la intercambiabilidad de los engranes de todos los nfuneros de dientes, perodel mismo angulo de presi6n y paso. El lector debe tener conocimiento de las ventajasy desventajas de los divers os sistemas, para poder elegir el diente 6ptimo para un disefio estandar de diente.En la tabla 7-1 se listan las proporciones del diente para engranes completamenteintercambiables, en el sistema de unidades usual en Estados Unidos, ypara que operen a distancias estandar entre centros. No se han establecido norma
sen este pais para sistemas de dientes basados por completo en la aplicacion de lasunidades SI. A decir verdad, es probable que varios afios antes de que se llegueaun acuerdo los problemas que se deben resolver son tan complejos como costosos.lncluso en Inglaterra, en donde llevan cierto adelanto en comparacion con EstadosUnidos en 10 concerniente a la conversi6n al sistema metrico, el sistema en pul·gadas sigue predominando aun en el caso de los engranajes. Merritt afirma. queuna de las razones es que se acababan de aprop.ar y adoptar Jas nuevas not.mascuan4.9 seJnici6 l!il instauraci6n del sistema mei"rico .... 08 addenda incluidos en la tabla 7-1 son para engranes con numeros de dientes
iguales a, 0 mayores que, los nfuneros minimos enumerados y, para estos numerosno habra socavaci6n. Para unos cuantos mimeros de dientes debe usarseuna modificaci6n denominada sistema de addendum largo y corto. En este sistema,el addendum del engrane se reduce apenas 10 suficiente como para asegurarque el contacto no principie antes del punto de·interferencia (vease la secci6n 7-7).Entonces se incrementa el addendum del pifi6n en una cantidad correspondiente.En esta modificaci6n no hay cambio en el angulo de presi6n 0 en los circulosde paso, de modo que la distancia entre los centros sigue siendo la misma.Lo que se pretende es incrementar la acci6n de retroceso 0 alojamiento y reducirlaacci6n de acercamiento.
t Normalizados por la American Gear Manufacturers Association (AGMA) y el American NationalStandards Institute (ANSI). Las normas AGMA se pueden char 0 tomar en su totalidad, a condici6n deque se de el credito apropiado, por ejemplo, "Tornado de AGMA In/ormation. Sheet-Stenth of Spur,Herringbone, and Bevel Gear Teeth (AGMA, 225.01), con autorizaci6n del editor, la American GearManufacturers Association, 1338 Massachusetts Avenue, N.W., Washington, D.C., 2005". Estas normasse han utilizado con amplitud en este capitulo y en el que sigue. En cada caso se cita el numero delboletin informativo. La tabla 7-1 se tom6 de la publicaci6n 201.02-y 201.02A de
la AGMA; pero yeasetam bien la 207.04. Es conveniente escribir a la AGMA para obtener una !ista completa de normas,

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 236/508
debido a los cambios y adiciones que se hacen de tiempo en tiempo.t H.E. Merritt, Gear Engineering, Wiley, New York, 1971.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 237/508
ENGRANES RECTOS 0 ClLtNDRICOS 265Tabla 7-1 Sistemas de dientes norma AGMA y ANSI, para engranesrectosxiPaso gruesot(hasta20p)Cantidad altura completa
Angulo de presi6n q, 20° 25°Addendum a 1.000 1.000-p -pDedendum b 1.250 1.250PAltura de trabajo 14.2.000 2.000P2.25 2.25Altura completa hI (minimo) p pEs pesor circular del diente t '11" '11" 2P 2PRadio del chafllm de la cremallera 0.300 0.300
basica rf -p -pHol..ura basica c (miriima) . ; 0.250 0.250-p -pHolgura c (dientes cepillados 0 rectificados) 0.350 0.350-p p Ntlmero minima de dientes en el pifl6n 18 12Numero minimo de dientes por par 36 24Anchura minima del borde superior to 0.25 0.25P pt Veanse las llormas AGMA 201.02. 201.02A i Pero sin incluir a 20PPaso fino(2OPymas)altura completaZOO 1.000
-p1.;00 + 0.002 pulg2.000P2.200 0 002 -p+ . pulg1.5708J>No estandarizado0.;00 + 0.002 pulgO...oo + 0.002 puig18No estandarizado
El dedendum adicional de 0.002 pulg que se da en la tabla 7-1 para los en..granes de paso fino, proporciona el espacio suficiente para la acumulacion de polvoen las raices de los dientes.Las alturas de trabajo indicadas en la tabla 7-1 son para dientes de alturacompleta y definen a estos; en el caso de dientes truncados, usese l.60IP.Conviene haeer notar en forma especial que las normas que se dan en la tabla7-1 no tienen por objeto restringir la libertad del disefiador. Las proporcionesestandarde los dientes conducen a la intercambiabilidad y a cortadores estandar queresultan economicos; pero la necesidad de engranes de alto rendimiento puedendictar desviadones considerables respecto a estos sistemas.Algunos de los sistemas de dientes que ahora resultan obsoletos son los dos
sistemas AGMA de 141", de dientes truncados Fellows de 20° y el Brown & Sarpe.Los sistemas obsoletos no se deben aplicar a disefios nuevos, pero quiza senecesiten como referenda al redisenar 0 remodelar maquinarias existentes en las

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 238/508
que se usan estos sistemas mas anticuados.
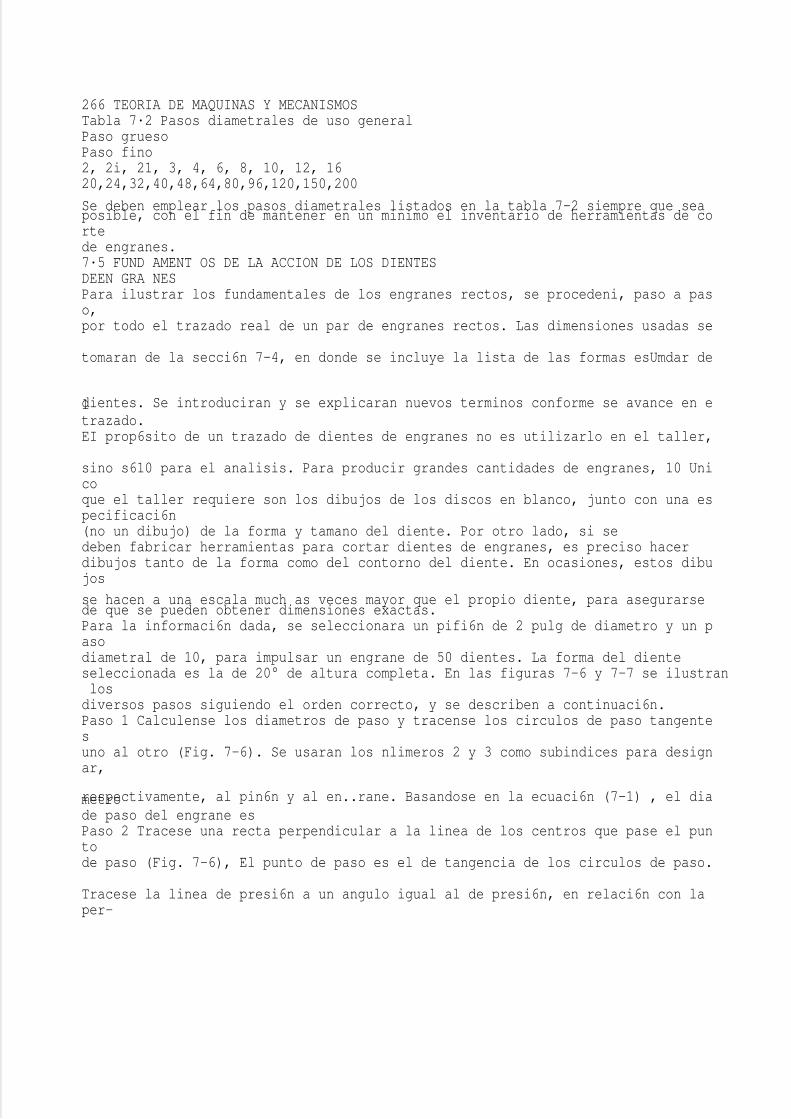
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 239/508
266 TEORIA DE MAQUINAS Y MECANISMOSTabla 7·2 Pasos diametrales de uso generalPaso gruesoPaso fino2, 2i, 21, 3, 4, 6, 8, 10, 12, 1620,24,32,40,48,64,80,96,120,150,200
Se deben emplear los pasos diametrales listados en la tabla 7-2 siempre que seaposible, con el fin de mantener en un minimo el inventario de herramientas de cortede engranes.7·5 FUND AMENT OS DE LA ACCION DE LOS DIENTESDEEN GRA NESPara ilustrar los fundamentales de los engranes rectos, se procedeni, paso a paso,por todo el trazado real de un par de engranes rectos. Las dimensiones usadas se tomaran de la secci6n 7-4, en donde se incluye la lista de las formas esUmdar de
dientes. Se introduciran y se explicaran nuevos terminos conforme se avance en eltrazado.EI prop6sito de un trazado de dientes de engranes no es utilizarlo en el taller, sino s610 para el analisis. Para producir grandes cantidades de engranes, 10 Unicoque el taller requiere son los dibujos de los discos en blanco, junto con una especificaci6n(no un dibujo) de la forma y tamano del diente. Por otro lado, si sedeben fabricar herramientas para cortar dientes de engranes, es preciso hacerdibujos tanto de la forma como del contorno del diente. En ocasiones, estos dibujos
se hacen a una escala much as veces mayor que el propio diente, para asegurarsede que se pueden obtener dimensiones exactas.Para la informaci6n dada, se seleccionara un pifi6n de 2 pulg de diametro y un pasodiametral de 10, para impulsar un engrane de 50 dientes. La forma del dienteseleccionada es la de 20° de altura completa. En las figuras 7-6 y 7-7 se ilustranlosdiversos pasos siguiendo el orden correcto, y se describen a continuaci6n.Paso 1 Calculense los diametros de paso y tracense los circulos de paso tangentesuno al otro (Fig. 7-6). Se usaran los nlimeros 2 y 3 como subindices para designar,
respectivamente, al pin6n y al en..rane. Basandose en la ecuaci6n (7-1) , el diametrode paso del engrane esPaso 2 Tracese una recta perpendicular a la linea de los centros que pase el puntode paso (Fig. 7-6), El punto de paso es el de tangencia de los circulos de paso. Tracese la linea de presi6n a un angulo igual al de presi6n, en relaci6n con laper-
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 240/508
Angulo -cPde presi6nFig..ra 7-6 Trazado de un par de engranes rectos.ENGRANES RECTOS 0 CILiNDRICOS 267Unea de los centrosCfrculo de base
irculo de pasoUnea depresibnCfrculo de basependicular. La linea de presion corresponde a la linea generadora, 0 sea, la linea deaccion definida en las secciones anteriores. Como se muestra, siempre es normalalas involutas en el punto de contacto y pasa por el punto de paso. Se Ie conocecomo linea de presion porque la fuerza resultante del diente durante la accion seejerce a 10 largo de ella. El angulo de presion es aquel que forma la linea de
presion con una perpendicular a la linea de los centros que pasa por el puntode paso. En este ejemplo, el angulo de presion es de 20°.Paso 3 Por los centros de cada engrane, construyanse las perpendiculares 02A y03B a la linea de presion (Fig. 7-6). Estas distancias radicales, de los centrosa la lineade presion, son los radios de los dos circulo s de base. Los circulos de base corres-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 241/508
268 TEORtA DE MAQUINAS Y MECANlSMOSponden a los cilindros de base de la seccion 7-3. La curva involuta se origina en estoscirculos de base. Tracese cada circulo de base.Paso 4 Generese una curva involuta en cada circulo de base (Fig. 7-6). Esto seHustra en el engrane 3. En primer lugar, dividase el circulo de base en las part
esiguales Ao, Ah A2, etc. Luego, construyanse las rectas radiales 03AO. 03Ai> O)A2 etc. A continuacion, construyanse las perpendiculares a estas rectas radiales. Lainvoluta principia en Ao. El segundo punto se obtiene tomando la distancia AoAlsobre la perpendicular que pasa por AI' EI siguiente punto se encuentra tomandodos veces AoAl sobre la perpendicular que pasa por A2, y asi sucesivamente. Lacurva construida pasando por estos puntos es la involuta. La involuta para elpifi6n se traza de la misma manera en el circulo de base del pifion.Paso 5 Cortese una plantilla para cada involuta usando una cartulina 0, de preferencia,una hoja de plastieo transparente, y marquese en ella el centro correspondiente
de eada engrane. Entonees se usan estas plantillas para dibujar la porcion deinvoluta de eada diente; se pueden voltear para dibujar el lado opuesto del mismo.En algunos casos puede resultar conveniente haeer una plantilla para el dienteeompleto.Paso 6 CaleUlese el paso circular. La anchura del diente y la del e spacio se construyeniguales a la mitad del paso circular. Sefialense estas distancias sobre los cireulosde paso. Con base en la ecuacion ( 7-3),Tr TrPc = P =10
= 0.314 16 pulgde tal manera que la anchura del diente y del espacio es (0.3 14 16)/2, :;; 0.15708pulg. Estos punt os estan sefialados sobre los circulos de paso de la figura 7-7.Paso 7 Tracense los cir eulos de addendum y dedendum para el pifion y el engrane (Fig. 7-7). De la tabla 7-1, el addendum esEI dedendum es1 1a = p =10
=0.10 pulgb =1 ;5= li.5 = 0. 125 pulgPaso 8 Ahora tracese la porcion de involuta de los perfiles de los dientes en el pifi6n y el engrane (Fig. 7- entre los circulos de holgura y de dedendum para unehaflan. Notese que el circulode base del engrane es menor que el de dedendum y, en vista de ello, el perfil deldiente es todo involuta a excepcion del chafl{m. Por otro lado, el radio del circulo
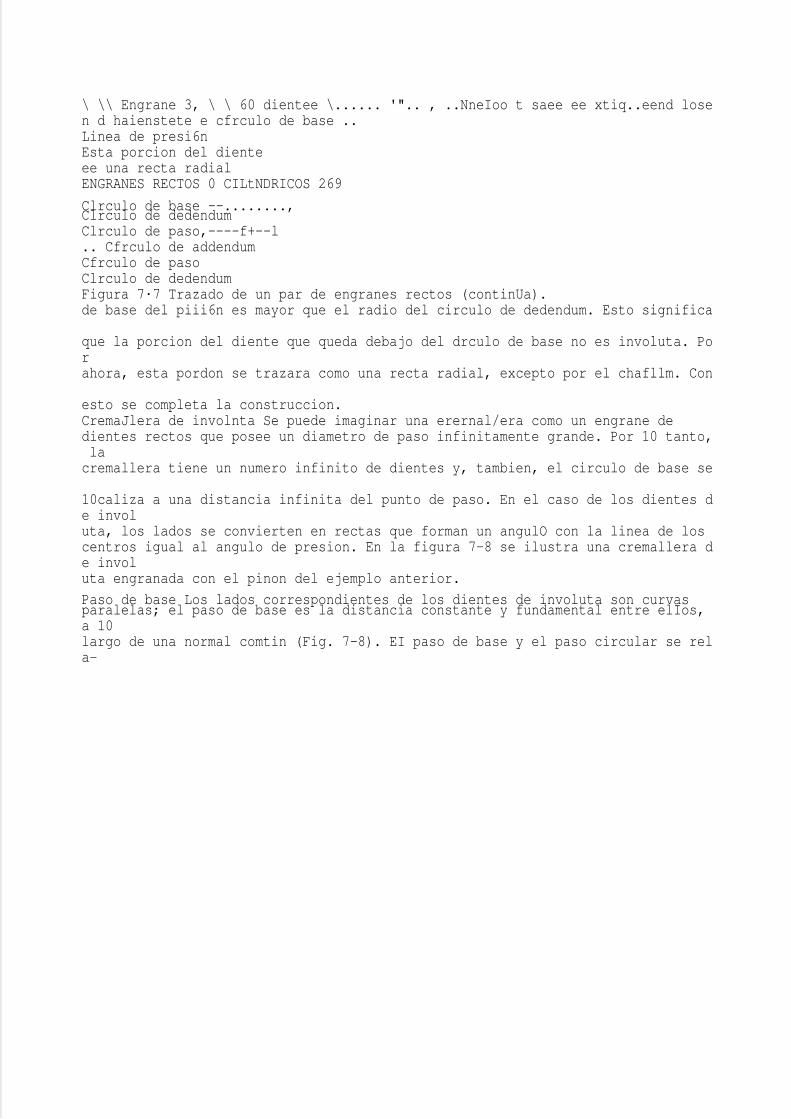
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 242/508
\ \\ Engrane 3, \ \ 60 dientee \...... '".. , ..NneIoo t saee ee xtiq..eend losen d haienstete e cfrculo de base ..Linea de presi6nEsta porcion del dienteee una recta radialENGRANES RECTOS 0 CILtNDRICOS 269
Clrculo de base --........,Clrculo de dedendumClrculo de paso,----f+--l.. Cfrculo de addendumCfrculo de pasoClrculo de dedendumFigura 7·7 Trazado de un par de engranes rectos (continUa).de base del piii6n es mayor que el radio del circulo de dedendum. Esto significa que la porcion del diente que queda debajo del drculo de base no es involuta. Porahora, esta pordon se trazara como una recta radial, excepto por el chafllm. Con
esto se completa la construccion.CremaJlera de involnta Se puede imaginar una erernal/era como un engrane dedientes rectos que posee un diametro de paso infinitamente grande. Por 10 tanto,lacremallera tiene un numero infinito de dientes y, tambien, el circulo de base se 10caliza a una distancia infinita del punto de paso. En el caso de los dientes de involuta, los lados se convierten en rectas que forman un angulO con la linea de loscentros igual al angulo de presion. En la figura 7-8 se ilustra una cremallera de involuta engranada con el pinon del ejemplo anterior.
Paso de base Los lados correspondientes de los dientes de involuta son curvasparalelas; el paso de base es la distancia constante y fundamental entre elIos,a 10largo de una normal comtin (Fig. 7-8). EI paso de base y el paso circular se rela-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 243/508
270 TEORtA DE MAQUINAS Y MECANISMOSFigura 7-8 Pii'l6n y cremallera de involuta.cionan como se indica a continuaci6n,Pb::::: Pc cos <p (7-5)en donde Pb es el paso de base y Pc es el paso circular. Ya se explic6 que el paso circular
es la distancia entre los dientes medida a 10 largo del circulo de paso. EI paso de base es una medida mucho mas b<),sica puesto que se trata de la distancia entredientes medida a 10 largo de la normal comtm, al igual que la distancia entre dientesmedida a 10 largo del circulo de base.Engrane interno En la figura 7-9 se presenta el pift6n del ejemplo anterior acopladocon un engrane interno 0 anular. Cuando se trata de un contacto interno, losFigura 7-9 Engrane y piMn interiores.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 244/508
ENG RANES RECTOS 0 CILiNDRICOS 271dos centros se encuentran del mismo lado del punto de paso; de donde, se inviertenlas posiciones de los circulos de addendum y dedendum con respecto al circulo de paso. Como se muestra en la figura 7-9, el circulo de addendum del engrane inter
noqueda dentro del circulo de paso; de la misma manera, el circulo de dedendumqueda afuera del circulo de paso.En la figura 7-9 se observa tambien que el circulo de base esta dentro delcirculo de paso, cerca del de addendum.7-6 FORMACION DE LOS DIENTES DE ENGRANESExisten muchas maneras de darle forma a los dientes de los engranes, porejemplojundicionen moldes de arena, vaciado en cascaron. jundicion revestida. jundicion enmolde permanente, jundicion a troquel 0 jundicion centrifugada. Se pueden formar,aplicando el proceso de metalurgia de polvos, 0 bien, por extrusion, en donde
a una sola barra de aluminio se Ie puede dar la forma y luego se rebana para obtenerlos engranes. Los engranes que soportan grandes cargas en comparaci6n consu tamano se fabrican casi siempre de acero y se cortan ya sea con cortadores de forma 0 con cortadores generadores. En el corte de forma, el espacio entre dientestoma la forma exact a del cortador. En el generador, una herramienta que tiene unaforma diferente a la del perfil del diente se mueve en relaci6n con el disco enblancopara obtener la forma apropiada del diente.Probablemente el metoda mas antiguo para cortar dientes de engrane es el
fresado. Se usa una f resa que corresponde a la forma del espacio entre dientesparacortar un espacio a la vez, despues de 10 cual el engrane se hace girar un pasocircularhasta la siguiente posici6n. Con este metodo, te6ricamente se necesita uncortador diferente para cada engrane que se debe cortar porque, por ejemplo, laforma del espacio en un engrane de 25 dientes es diferente, p6ngase por caso, delque corresponde a un engrane de 24 dientes. En realidad, el cambio en el espacio no es demasiado grande y se pueden utilizar ocho cortadores para cortar cualquier .
engrane dentro de la gama de 12 dientes hasta una cremallera, con una exactitudrazonable. Por supuesto, se requiere un juego por separado de cortadores paracada paso.El limado es uno de los metodos mas favorecidos para generar dientes de engranes.La herramienta cortadora puede ser un cortador de cremallera 0 un cortadorde pinon. La operaci6n se explica mejor con referenda a la figura 7-10. Eneste caso, el cortador de cremallera de movimiento alternativo se alimenta primerohacia el disco en blanco hasta que los circulos de paso son tangentes. Luego, despuesde cada carrera de corte, el disco en blanco y el cortador ruedan ligeramentesobre sus circulos de paso. Cuando el disco en blanco y el cortador han
girado una distancia igual al paso circular, el cortador se regresa al punto departiday el proceso se continua hasta que se han cortado todos los dientes.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 245/508
El jresado con fresa maestra es un metoda de generar dientes de engranes muysimilar al del cortador de cremallera. La fresa maestra es un cortador cilindrico

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 246/508
272 TEORlA DE MAQUINAS Y MECANISMOS8 cOftador de cremallera tiene unmovimiento altemativo en unadirecciOn perpendicular a ests p6ginltFigura 7-10 Cepillado de los dientes con un cortador de cremallera.EI disco blanco gira en esta d ireccion
Figura 7-11 Pulido de engranes c6nicoespirales. (The Falk Corporation, Subsidiaria de Sunstrand Corporation,Milwaukee, Wis.)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 247/508
ENGRANES RECTOS 0 CILtNDRICOS 273con una 0 mils roscas helicoidales muy semejante a un macho de tornillo, y tiene lados rectos como una cremallera. La fresa maestra y el disco en blanco se hacen girar continuamente con una raz6n apropiada de velocidades angulares, y entonces
se alimenta lentamente la fresa maestra a traves de la cara del disco en blanco,desdeun extremo del diente hasta el otro.Despues del proceso de maquinado, con frecuencia se aplican metodos deacabado tales..omo el rectificado, pulido, cepil/ado y bruflido, cuando es necesarioproducir perfiles de dientes de gran precisi6n y con superficies bien acabadas.Enla figura 7-11 se ilustra el proceso de pulido.7-7 INT ERFERENCIA Y SOCAVACIONEn esta etapa de la exposici6n resultara muy beneficioso seguir la acci6n de un
parde dientes desde que entran en contacto hasta que se separan. En la figura 7-12sehan reproducido los circulos de paso de los engranes de la secci6n 7-5. Sup6ngaseque el pifi6n es el impulsor y que gira en el mismo sentido del movimiento de las.. EngraneimpulsadoClrculo de dedendum .. . .. ..ro"..""..?8/.... .... ..,.. ntacto.. --,p.--=.ccl'o . -.. CadlrdceunloddumeAngulode_<i> presi6nLInea de
presi6n /; / /c<?I'!..ct.. -< P .... to.. .. "'" Clrculo de addendum ! ( mlclal,de paso "'\'\\.. y Clrculo de paso t Circulo de dedendum \l ( "n.. _ ,m",w, J i ; Figura 7-12 Fases de aproximaci6n y retroceso de la acci6n de los dientes de engrane.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 248/508
274 TEORiA DE MAQUINAS Y MECANISMOSmanecillas del reloj. El problema es localizar los puntos inicial y final de contadocan forme un par de dientes acoplados realizan el cicIo de endentamiento.Para resolver el problema se traza la linea de presi6n y los circu)os de addendum
y dedendum de ambos engranes. Para los dientes de involuta, se ha visto queel contacto se debe llevar a cabo a 10 largo de la linea de presi6n. Esto expliea porque a esa linea tambien se Ie da el nombre de linea de acci6n. Como se ilustra en lafigura, el contacto principia en donde el circulo de addendum del engrane impulsadocruza l a linea de acci6n . Por consiguiente, el contacto inidal se efectua en lapunta del diente del engrane y sabre el flanco blanco del diente del pifi6n.Conforme el diente del pifi6n irnpulsa al diente del engrane, ambos se acercanal punta de paso; cerca de este, el contacto se desliza hacia arriba par el flan
co deldiente del pifi6n y hacia abajo par la cara del diente del engrane. En el puntadepaso, el contacto se produce en los circulos de paso. N6tese que el movimiento esun rodamiento puro s610 en el punta de paso.Conforme el diente se aleja a retrocede del punta de paso, el punta de contactose desplaza en la misma direcci6n que antes. El contacto se desliza hacia arribaporla cara del diente del pifi6n y hacia abajo por el flanco del diente del engrane. Elultimo punto de contacto se presenta en la punta del diente del pifi6n y el flanco
del diente del engrane. Esto se 10caliza en la intersecci6n de la linea de acci6n y elcirculo de addendum del pifi6n.La fase de aproximacion 0 aeereamiento de la acci6n es el periodo comprendidoentre el contacto inicial y el punto de paso. Durante la fase de acercamiento,el contacto es un deslizamiento hacia abajo par la cara del diente del engrane haciael circulo de paso. Esta clase de acci6n puede compararse a empujar una varasobre una superficie.En el punta de paso no se produce deslizamiento y la acci6n es rodamientopuro.La fase de retroceso 0 alejamiento de la acci6n es el periodo comprendido entre
el contacto en el punto de paso y el contacto final. Durante la fase de retroceso,el contacto es un deslizamiento hacia abajo por el flanco del diente del engrane,alejandose del circulo de paso. Esta clase de acci6n se puede comparar a tirar deuna vara sabre una superficie.Ahara se construyen los perfiles de los dientes del pifi6n y del engrane pasando por los puntos de contacto inicial y fmal de la figura 7-12. La interseeci6n deestos perfiles con los eirculos de paso define los areos de acci6n, aproximaci6nyretroeeso.
El arco de accion qr es el areo del circulo de paso par el que se mueve un perfil dediente, desde el principio hast a el final del contaeto can un perfil acoplado.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 249/508
EI area de aproximacion 0 aeercamiento' qa es el areo del circulo de paso por elquese mueve un perfil de diente, desde que se inicia el contaeto hasta que el punto de contacto llega al punto de paso.EI area de retroeeso 0 alojamiento qr es el area del cireulo de paso par el quese
mueve un perfil de diente, desde el contacto en el punto de paso hasta queconcluye dicho contacto.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 250/508
Clrculo de baseENG RANES RECTOS 0 CILiNDRICOS 275Engrane impulsado, 3------.A.-Clrculo de
addendum'-... r Clrculo de""'f addendumLa intarierehcia es sabre el ..flanco del impulsor durante ..Ia aproximaci6nEsta porci6n d ..1 perfiino as una inllOluta Clrculo de baseEngrane impufsor, 2Figura 7-13 Interferencia en la acci6n de losdientes de engrane.EI contacto de porciones de perfiles de diente que no son conjugados se conoce
con e1 nombre de interjerencia. Considerese la figura 7-13. En ella se ilustrandosengranes de 16 dientes con un {mgulo de presi6n de 14!°, con dientes de alturacompleta. E1 impulsor, de engrane 2, gira en el mismo sentido del movimiento delas manecillas del reloj. Los puntos inicial y final de contacto se designan conA yB, respectivamente, y se localizan sobre la linea de presi6n. N6tese ahora..quelospuntos de tangencia de 1a linea de presi6n con los circulos de base C y D se 10- calizan dentro de los puntos A y B. Existe interfere..cia.La interferencia se explica como sigue. EI contacto principia cuando la puntadel diente impulsado hace contacto con el flanco del diente impulsor. En este
caso, el flanco del diente impulsor entra primero en contacto con el diente impulsadoen el punto A, y esto ocurre antes de que la porci6n de involuta del diente impulsorquede dentro de alcance. En otras palabras, se esta produciendo el contactopor debajo del circulo de base del engrane 2, sobre la porci6n de no involuta delflanco. EI efecto real es que 1a punta 0 cara de involuta del engrane impulsadotiende a socavar el flanco de no involuta del impulsor.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 251/508
276 TEORiA DE MAQU INAS Y MECANISMOSEn este ejemplo ocurre el mismo efecto cuando los dientes rompen el contacto.EI contacto debe conduir en el punto D 0 antes. Puesto que no conduyesino hasta el punto B, el efecto es que la punta del diente impulsor socava el flancodel diente impulsado, 0 interfiere con el.
Cuando los dientes del engrane se producen mediante un proceso de generaci6n,la interferencia se elimina automaticamente debido a que 1a herramienta decorte elimina la porci6n del flanco que produce la interferencia. Este efecto recibeel nombre de socavaci6n; si la socavaci6n es pronunciada, el diente socavado sedebilita considerablemente. Por tanto, el efecto de eliminar la interferencia por unproceso de generaci6n se reduce sencillamente a sustituir un problema por otro.No se puede exagerar la importancia del problema de los dientes que se handebilitado por socavaci6n. Por supuesto , se puede elirninar la interferencia uti·lizando mas dientes en los engranes; sin embargo, si estos deben transmitir una
cantidad determinada de potencia, s610 se puede usar un mayor nfunero de dientes incrementando el diametro de paso. Esto hace que los engranes sean mas grandes,10 que rara vez se considera conveniente, y tambien aumenta la velocidad de lalinea de paso. Este incremento en la velocidad de la linea de paso hace que losengranessean mas ruidosos y reduce un tanto la transrnisi6n de potencia, aunque noen razon directa. Sin embargo, en general, el uso de mas dientes para eliminar 1ainterferencia 0 la socavaci6n raramente se considera como solucion aceptable.Otro metodo para reducir la interferencia y el grado resultante de socavaciones emplear un mayor angulo de presi6n. Esto crea un circulo de base mas pequeno,
de modo que una mayor pordon del perfil del diente tiene forma de involuta. Enefecto, esto significa que se pueden usar menos dientes y, como resultado, los engranescon mayor Angulo de presi6n son mas pequenos.7-8 RAZON DE CON TAC TOEn la figura 7-14 se muestra la zona de accion de los dientes de engrane endentados,en donde el contacto del diente principia y concluye en las intersecciones de/Puntodeinterferencia ..MovilTientoJi'igura 7-14
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 252/508
ENGRANES RECTOS 0 CILINDRICOS 277los dos circulos de addendum con la linea de presion. En la figura 7-14, el contactoinicial ocurre en a y el contacto final en b. Los perfiles de diente que pasan por estospuntos se interseean con el circulo de paso en A y B. respectivamente. Como se
indica, la distancia AP es el arco de aproximacion qa y la distaneia PB, es el areode retroceso qr, la suma de estos da el arco de accion qt.Considerese una situacion en la que el arco de accion es exactamente igual alpaso circular; es decir, qt = Pc. Esto signifiea que un diente y su espacio ocuparanla totalidad del areo AB. Dicho de otra manera, cuando un diente entra apenas en contacto en a, el diente anterior esta finalizando simultaneamente su contactoen b. Por ende, durante la accion del diente, desde a hasta b, habra exaetamente un par de dientes en contacto.
A continuacion, considerese una situacion en la que el arco de accion esmayor que el paso circular; pero no mucho mayor, por ejemplo qt = 1.2pc. Estosignifica que cuando un par de dientes esta entrando apenas en contacto en a, el par anterior, ya en contacto, todavia no habra llegado a b. Por consiguiente,durante un breve lapso se tendran dos pares de dientes en contacto, uno en la cereaniade A y el otro cero de B. Conforme avanza el endentamiento, el par cercanoa B debe cesar el contacto, quedando un solo par tocandose, hasta que el proceso se repite.Debido a la naturaleza de esta accion de los dientes (uno, dos, 0 incluso maspares de dientes en contacto), eonviene definir el termino razon de contacto me
comom - qt e- Pc (7-6)un numero que indica el numero promedio de pares de dientes en contacto.La ecuacion (7-6) resulta un tanto inconveniente, a menos que se trace undibujo semejante al de la figura 7-14, de tal modo que se puedan medir las distanciasqa y qr' Estas distancias dependen de los diametros de los circulos de paso,que pueden variar, ya que a su vez dependen de la distancia de montaje entre los dos centros de los engranes. Asimismo, se puede definir la razon de contactoutilizando el circulo de base, y esta sera en realidad una mejor definicion porque el
circulo de base tiene un diametro fijo.En la figura 7-15, en donde se presenta al engrane 2 como el impulsor, el contactoprincipia en el punto B, en donde el circulo de addendum del engrane impulsadocruza 1a linea de accion, y eonc1uye en C, en donde el cireulo de addendumdel impulsor cruza la linea de accion. La longitud de la trayeetoria de contactoesU = Ua + Ur (a)en donde los subindices a y r designan las fases de aproximacion y retroceso, respectivamente.Durante la aproximacion el contacto se produce a 10 largo de la ree.a BC y el engrane gira describiendo el angulo a, conocido como tingulo deaproximacion. Este tingu/o subtiende un area del cireulo de base o btenido eonst
ruyendolos perfiles de diente por B y P, para intersecarse con el circulo de base.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 253/508
278 TEORiA DE MAQUINAS Y MECANISMOSI(Figura 7·15Durante el retroceso, el contacto ocurre a 10 largo de PC, mientras el engranegira describiendo el fu1gulo 'Y, llamado {mguJo de retroceso. N6tese que este an
gulosubtiende tambien un areo del circulo de base, obtenido al determinar la intersecci6nde los perfiles de diente que pasan por P y C con el circulo base.El p aso de base es la distancia entre los perfiles de diente correspondientes,medida sobre la linea de aeci6n. Por 10 tanto, la raz6n de contaeto esm C =--Ua + Ur -Ph(7-7)Los valores de u" Y Ub se pueden obtener analitie amente, observando los dos triangulosrectfu1gulos 02AC Y 03DB de la figura 7-15. Partiendo del trilmgulo 02AC,
se puede escribir(7-8)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 254/508
(a)Nudeev pores liniognul a -1/;'ulo de pasodelpil'l6n.j.f Aumento
-entre los ceenn ltrao dsi stancia (0)Nuevo circulode paso delpil'lOnFigura 7·16 Efecto de la distancia aumentada entre los centros sobre la acci6n delengranaje de involuta: montaje a a) una distancia normal entrelos centros y b) una distancia aumentada entre los centros...en..oen..o
Q en§.. ..

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 255/508
280 TEORIA DE MAQUINAS Y MECANISMOSDel mismo modo, basandose en el triangulo OlAe, se tieneUr =: [(r2 + a)2 d2]1/2- rz senq, (7-9)Entonces la razon de contacto se obtiene al sustituir las ecuaciones (7-8) y (7-9) enla (7-7). Sin embargo, se podria observar que las ecuaciones (7-8) y (7-9) solo
sonvaIidas para las condiciones(7-10)porque el contacto no se puede iniciar antes del punto A (Fig. 7-15) 0 conduirdespues del punto D. Por tanto, si el valor de Ua 0 u" como se calculan mediante la (7-8) 0 la (7-9) no satisface las desigualdades de la (710), sera preciso utilizar la(7 -10) para calcular Ua 0 u" segim sea el caso, usando el signo de igualdad.La razon de contacto mas grande posible se obtiene ajustando los addenda decada engrane, de tal suerte que se utilice la distancia AD completa (Fig. 7-15).
Luego, la accion se define mediante los trilmgulos OlAD y 03AD. Por 10 tanto,a2 = [d2 + (r2 + r 3)2 sen2 q, ]112 - r2a3 = [r.., + (rz + r3)2 sen2 q, ]1/2 - r3(7-11)(7-12)como los addenda az Y a3, respectivamente, de los engranes 2 y 3. Si se excedecualquiera de estos addenda, 0 ambos, se producira socavacion durante la generacionde los perfiles.7-9 VARIACION DE LA DISTANCIA ENTRE CENTROSEn la figura 7-16a se ilustra un par de engranes acoplados que tienen dientes deinvoluta,a un angulo de presion de 20°. Puesto que ambos lados de los dientes estan
en contacto, no se puede acortar la distancia entre los centros 0203 sin trabarlos 0deformarlos.En la figura 7-16b, se han separado el mismo par de engranes incrementandoligeramente la distancia entre los centr..s. Ahora, como se indica, existe una holgura0 juegoentrelos dientes. Cuando se aumenta la distanciaentrelos centros, se creannuevos circulos de paso que tienen radios mayores, en virtud de que tales circulosson siempre tangentes el uno al otro. No obstante, los circulos de base son unacaracteristica constante y fundamental de los engranes. Esto significa que un
aumento en la distancia entre los centros cambia la inclinaci6n de la linea de acci6ny da por resultado un angulo de presi6n mas grande. Se observara tambien que unpunto trazador de la nueva linea de presion todavia generara las mismas involutasque se presentaron en la figura 7-16a, la normal a los perfiles de los dientes aiinpasa por el mismo punto de paso y, por ende, la ley del engranaje se satisface paracualquier distancia entre los centros.'Para corroborar que la raz6n de velocidades no ha cambiado de magnitud, seobserva que los triangulos 02AP y 03BP son semejantes. Asimismo, puesto que

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 256/508
ENGRANES RECTOS 0 CILINDRICOS 28102A Y O,B son distancias fijas y no varian al alterarse las distancias entre loscentros,la raz6n de los radios de paso, 02P y o)p, se mantendra fija tambien.Otro de los efectos que se originan al aumentar la distancia entre los centros,que se puede observar en la figura 7-16, es el acortamiento de la trayectoria de
contacto. La trayectoria original de contacto CD se ha acortado hasta C'D'. Laraz6n de contacto [Ec. (7-7)] se puede definir como la raz6n de la longitud de latrayectoria de contacto al paso de base. El valor limite de esta raz6n es la unidad;de 10 contrario, se presentarian periodos en los que no existiria contacto en 10absoluto.Asi pues, la distancia entre los centros no puede ser mayor que la quecorresponde a una raz6n de contacto igual a la unidad.Resulta interesante conduir, en virtud de la exposici6n anterior, que se puedenmontar sobre el mismo eje dos engranes con numeros de dientes ligeramente difere
ntes(aunque no fijos entre si 0 at eje) y acoplarse con el mismo pifi6n 0 la mismacremallera, a condici6n de que no se excedan las limitaciones analizadas.7·10INVOLUTOMETRIAEl estudio de la geometria de 1a involuta recibe el nombre de involutometria. Enlafigura 7-17 se utiliza un circu10 de base, cuyo centro se localiza en 0, para generarla invo1uta BC. AT es la linea generadora, p e1 radio instantaneo de curvatura dela involuta y r el radio a cualquier punto T de la curva. Si el radio de circulo de base se designa como rb, la recta generadora AT dene la misma longitud que
el arco AB; de donde,(a)en donde a es el angulo comprendido entre los radiovectores que definen e1 origende la involuta y cualquier punto, como por ejemplo, T, sobre la involuta, y if'esel angulo comprendido entre los radiovectores que definen a cualquier punto T de la involuta y el origen A en el circulo de base de la linea generadora corresponoxFigura 7-17

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 257/508
282 TEORtA DE MAQUINAS Y MECANISMOSClrculo de baseoFigura 7·18diente. Puesto que OTA es un triimgulo rectangulo,(7-13)
AI resolver las ecuaciones (0) y (7-13) en forma simultanea para eliminar apseobtienea=tanq; q;que se p uede escribirinv q; = tan q; - q; (7-14)y define la funci6n involuta. EI angulo q; en esta ecuaci6n es el angulo de presi6nvariable de la involuta, y se debe expresar en radianes. Si se conoce cp, inv q;sepuede determinar facilmente; pero sera necesario usar tablas para encontrar el angulode presi6n cuando se da inv q; y se debe determinar q; (vease la tabla 6 del
a¢ndice).Haciendo nuevamente referencia a la figura 7-17, es evidente quer=cos q; (7-15)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 258/508
ENGRANES RECTOS 0 CILINDRICOS 283Para ilustrar el uso de las relaciones antes obtenidas, se determinaran lasdimensiones del diente de la figura 7-18. En este easo, se ha trazado la pordondelperfil de diente que se extiende por encima del eireulo de base, y se da el espesor
del diente a 10 largo del areo, tp, en el cireulo de paso (punto A). El problemaeonsisteen determinar el espesor del diente en eualquier otro punto, pongase porcaso, T. Las diferentes eantidades sefialadas en la figura 7-18 se definen eomosigue:rb = radio del cireulo de baserp = radio del cireulo de pasor = radio en e1 que se va a determinar el espesor del dientetp = espesor del diente a 10 largo del areo, en el cireulo de pasot = espesor a 10 largo del area que se va a determinarcP = lingulo de presion eorrespondiente al radio de paso rp({! = lingulo de presion eorrespondiente a eualquier punto T
{3p = espesor angular de medio diente en el cireulo de paso{3 = espesor angular de medio diente en eualquier punto TLos espesores de medio diente en los puntos A y T sonde tal manera queAhora se puede eseribir{3 -lL p -2r p-t = {3r2{3 = t2r A.. {3 {3tp t
lnv ({! - mv Of' = - = - -- p2rp 2r(b)(c)(d)El espesor del diente eorrespondiente a eualquier punto T se obtiene resolviendola(d) para t:t = 2r(;;p + inv cP -inv ({! ) (7- 16)Ejemplo 7-1 Un engrane tiene dientes de 30° cortados a altura completa, un paso diarnetral de 2dientes por pulgada y cuenta con 22 dientes. a) Calculese el radio del circulo d
e base. b) Determineseel espesor del diente en el circulo de base y tambien en el de addendum.SOLUCION Basandose en 10 visto en la secci6n 7-4 y aplicando las ecuaciones de la secci6n 7-1,se deterrninan las siguientes cantidades: addendum a = 0.500 pulg, dedendum b =0.5785 pulg,radio de paso rp = 5.500 pulg, paso circular Pc = 1.571 pulg. El radio del circulo de base se obtieneaplicando la (7-15)rb = rp cos cf> = 5.500 cos 20° = 5.168 pulg

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 259/508
284 TEORlA DE MAQUINAS Y MECANISMOSEI espesor del diente en el circulo de paso estp .. ==1 .;7 10.785 4 pulgAl convertir el ailgulo de presion de 20° del diente a radianes da </1 0.349 rad.
Luego,inv </1 tan 0.349 - 0.349 == 0.015 radEn el circulo de base, If'b = O, de manera que inv <Pb == O. Segun la (7-16), elespesor del wente en elcirculo de base estb = 2fb (t; + inv '" - inv If'b) == (2)(5. 168)[(.(..;.) + 0.015 - 0] = 0.886 pulgEI radio del circulo de addendum es fa = 6.000 pulg. Segun la (7-15), el {mgulode presion de lainvoluta correspondiente a este radio esDe donde,<P. cos'-I 2. = COS-I
5. 168= 0.532 fad fa 6.000inv <Pa = tan 0.532 - 0.532 = 0.058 rady la ecuacion (7-16) da el espesor del diente en el circulo de addendum como7-11 DIENTES NO ESTANDAR DE ENGRANESEn esta secci6n se investiganm los efectos provocados al modificar aspectos talescomo el angulo de presi6n, la altura del diente, el addendum 0 la distancia entrelos centros. Algunas de estas modificaciones no anulan la intercambiabilidad;todas elIas se realizan con el prop6sito de obtener un funcionamiento mejorado 0 una producci6n mas econ6mica.
Hay tres razones principales para utilizar dientes no estandar. Sucede muy amenudo que el disenador se encuentra bajo gran presi6n para producir disenosde engranes pequenos y, al mismo tiempo, que transmit an grandes cantidades depotencia. Por ejemplo, considerese una combinaci6n de engranes que deba teneruna raz6n de velocidades 4:1. Si el pin6n mas pequeno que llevara la carga tieneundiametro de paso de 2 pulg, el engrane tendra un diametro de paso de 8 pulg, 10que hace que el espacio global necesario para los dos engranes sea ligeramentemayor que 10 pulg. Por otro lado, si el diametro de paso del pin6n se puede reduciren s610 1/4 pulg, el diametro de paso del engrane se reduce en una pulgadacompleta y el tamafio global de la combinaci6n de engranes se reduce en 1 H pulg
.Esta reducci6n adquiere una importancia considerable cuando uno se percata deque las dimensiones de los elementos de maquina asociados, tales como ejes,cojinetes y cubiertas se reducen tambil.n. Si necesita un diente de un paso en particularpara transmitir la carga, el unico metodo para reducir el diametro del pifi6nes emplear menos dientes. Se vio con anterioridad que se presentan problemas

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 260/508
ENGRANES RECTOS 0 CILINDRICOS 28Srelacionados con interferencia, socavacion y la razon de contacto cuando losnumeros de dientes se hacen men ores que los minimos prescritos. Por consiguiente,las prindpales razones para usar engranes no estandar son eliminar la socavacion,
evitar la interferencia y mantener una razon de contacto aceptable. Tarnbien convieneobservar que si se fabrica un par de engranes con el mismo material, elpinon es el mas debil y esta sujeto a un desgaste mayor porque sus dientes estanencontacto una mayor pordon del tiempo. Por 10 tanto, la socavacion debilita aldiente que ya es de sl el menos fuerte de los dos. De donde, otra ventaja de losengranesno estandar es la tendencia a obtener un mejor equilibrio de la resistenciaentre el pinon y el engra ne.Conforme una curva involuta se genera a partir del circulo de base, su radiode curvatura se hace cada vez mas grande. Cerca del circulo de base, el radio de
curvatura es muy pequeno y es exactarnente cero en dicho circulo. De ser posible,conviene evitar cualquier contacto cerca de est a region de curvatura marcada,debido a la dificultad para obtener una e xactitud aceptable en el corte, en zonas depequena curvatura y, al mismo tiempo, porque los esfuerzos de contacto tienden a ser muy elevados. Los engranes no estandar ofrecen la oportunidad de hacer disenosque eviten estas zonas sensibles.Modificaciones de Ia holgura Un chafIan de mayor tarnafio en la raiz del dienteaumenta la resistencia a la fatiga del mismo y Ie da mayor altura para el cepill
adode su perfil. Puesto que no se pierde la intercarnbiabilidad, a veces se incrementa laholgura 0 claro hasta OAOOIP para obtener este chafIan mayor.En algunas aplicaciones se ha usado un lingulo de presion 1 7 17!o con unaholgura de 0.300IP para producir una razon de contacto de 2.Modificaciones de la distancia entre los centros Cuando se deben acoplar engranescon numeros bajos de dientes 0 cuando es preciso hacerlo con engranes de mayortarnano, se puede obtener cierta reduccion en la interferencia y una mejora en larazon de contacto, aumentando la distancia entre los centros . Aunque este siste
macambia las proporciones del diente y el angulo de presion de los engranes, losdientes resultantes se pueden producir con cortadores de cremallera (0 fresas maestras)cuando la linea de paso de la cremallera se ha desplazado 0 descentrado unadistancia e en relacion con el circulo de paso del engrane. Lo que se esta haciendoen este caso es desplazar el cortador de cremallera, alejandolo mas del centro delengrane que se esta cortando . Esto producira dientes mas gruesos que antes y es preciso calcular este espesor . En la figura 7 -19a se ilustra el problema y enla fig ura
7- 1 9b se presenta su solucion. El aumento sobre la magnitud esUmdar es 2e tan ¢, de manera que

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 261/508
t = 2e tan ¢ +.. (7- 17)en donde cP es el angulO de presion del cortador de cremallera y t es el espesordeldiente del engrane en su propio circulo de paso.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 262/508
286 TEORIA DE MAQUINAS Y MECANISMOSI -+I -Desp lazamiento dela cortadora l de cremaHera\, :(alFigura 7-19
Cfrculo de pasof del engrane" Cfrculo de (aesarrolladolpaso delI engraneLinea dede la cremallera( b )Sup6ngase ahora que se han cortado dos engranes con diferentes numeros dedientes, con el cortador descentrado respecto a los circulos de paso, como se indic6en el parrafo anterior. Puesto que los dientes se han cortado con un cortador ex
centrico,se acoplanin con un nuevo angulo de presi6n y tendran nuevos circulosde paso, y, en consecuencia, tambien tendran nuevas distancias entre los centros.Aqui se usa la palabra nuevo en el sentido de no ser estandar. El problema consiste,pues, en determinar el radio de estos nuevos circulos de paso y el valor delnuevo angulo de presi6n.En la siguiente notaci6n, la palabra estimdar se refiere a los valores que sehabrian obtenido de haberse empleado los sistemas usuales, 0 estlmdar, para obtenerlas dimensiones:<I> = angulo de presi6n del cortador generador de cremallera
<1>' = nuevo angulo de presi6n al que se acoplaran los engranes r2 = radio de paso estandar del pifi6n r2 = nuevo radio de paso del pifi6n, cuando se acopla conel engrane dador3 radio de paso esUmdar del engrane r3 = nuevo radio de paso del engrane, cuando se acopla con el pifi6n dadot2 = espesor real del diente del pifi6n en el radio de paso estandart3 = espesor real del diente del engrane en el radio de paso estandart 2 = espesor del diente del pifi6n en el nuevo radio de paso r213 = espesor del diente del engrane en el nuevo radio de paso r..N2 numero de dientes del pifi6nN3 = numero de dientes del engraneSegttn la ecuaci6n (7- 16)
t' = 3 2r3, (21Lr3 + inv '+'A..inv <1>') (a)(b)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 263/508
ENGRANES RECTOS 0 CILiNDRICOS 287La suma de estos dos espesores debe ser igual al paso circular, 0 bien, partiendo dela (7-2)t' + t ' - - 21Tr22 3 - Pc -
N2(c)Los diametros de paso de un par de engranes acoplados son proporcionales a susnumeros de dientes, de manera quey (d)Al substituir las ecuaciones (a) , (b) y (d) en la (c), y despues de reacomodarlosterminos, se obtiene(7- 18)La (7-18) da el angulo de presion <p' al que un par de engranes operaran, cuando se han modificado los espesores de los dientes en sus circulos de paso a t2 y t3
.Se ha demostrado que los engranes no tienen circulos de paso hasta que unpar de ellos haya entrado en contacto. Al hacer que un par de engranes entren en contacto, se crea un par de circulos de paso que son tangentes entre sl en el puntode paso . En el cur so de este estudio se ha aplicado la idea de un par de los llamadoscirculos de paso estimdar, para definir un punto especifico en las cur vas involutas. Como se vio anteriormente, estos circulos de paso estandar son los que sehabrian producido al acoplar los engranes si estos no se hubieran modificado respecto
a /as dimensiones est{mdar . Por otro lado, los de base son circulos fijos queno se alter an cuando se hacen modificaciones en los dientes. EI circulo de base sigue siendo el mismo, sea que se carnbien 0 no las dimensiones del diente; portanto, se puede determinar el radio del circulo de base, usando el circulo de pasoestimdar , 0 bien, el nuevo circulo de paso . Por consiguiente, la ecuacion (7-15) sepuede expresar comoDe donde,o bien,o rb = r2 cos <p '
r 2 c o s <p ' = r2 c o s <p, r2 cos <pr - --=-----'- 2 - cos <p 'Del mismo modo , para e l engrane ,, 'l eos <pr -3 - cos <p '(7- 1 9)(7-20)Estas ecuaciones dan los valores de los radios de paso reales cuando los dos engranescon dientes modificados se acop/an sin juego entre dientes. Por supuesto,la nueva distancia entre los centros es la suma de estos radios .

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 264/508
288 TEORiA DE MAQUINAR Y MECANT'SMOSFigura 7-20 Engrane estandar de altura compJeja de 20° y 12 dientes. presentando socavacion.Ahara han desarrollado todas las relaciones necesarias para crear engranes noestfmdar con cam bios en la distancia entre los centros . La utili dad de e,<;tas relaciones
se i lustra mejor par medio de un ejemplo.En la figura 7-20 se presenta un dibujo de un pii16n de 20°, de paso 1 y 1 2dientes, generado con un cortador de cremallera que tiene una holgura esUmdar de 0.250IP. En el sistema de altura completa de 20° , la interferencia es severa siempreque el mimero de dientes sea menor que 14. La socavacion resultante es evidenteenel propio dibujo. Si este pifi6n se acoplara con un engrane estfmdar de 40 dientes,la raz6n de contacto seria 1 .41 , 10 que puede verificarse con facilidad aplicando la
ecuaci6n (8-7).Para tratar de eliminar la socavaci6n, mejorar la acci6n de los dientes y aumentarla razon de contacto, supongase que se corta el pifi6n de 1 2 dientes partiendode un disco en blanco mas grande. Luego, el pifi6n resultante se acoplara unavez mas con el engrane estandar de 40 dientes, can el fin de determinar el gradodemejora. Si se designa el pifi6n con el subindice 2 y el engrane con el 3, se encontraranlos siguientes valores:t.P 20° r2 = 6 pulg r3 = 20 pulg P = 1Pc = 3.1416 pulg t3 ] .5708 pulg N2 12 teeth N3 = 40 teethEI cortador de cremallera se descentrara de tal modo que su linea de addendum
pase por el punto de interferencia del pifion, es decir, el punto de tangencia dela linea de presi6n de 20° y el circulo de base, como se ilustra en la figura 7-21 .Basfmdose en la ecuacion (7- 1 5) , se tiene(e)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 265/508
ENG RANES RECTOS 0 CILiNDRICOS 289dUen laaa c dreema pasoller ii\ _ ---+--:;".L--'----Figura 7-21 Descentrado de una cremallera para hacer que su linea de addendum pase por el punto deinterferencia.Entonces, segun la figura 7-21
e = a + rb cos 4> r2Despues de substituir la (e) en la (j) dae = a + '2 COSZ 4> rz = a 'z senz4>(f)Para una cremallera estimdar, el addendum es .a = 1 /P ; de modo que a = 1 pulgpara este problema. La excentricidad que se usara ese = 1 - 6 sen2 20° = 0.298 1 pulgLuego, al resolver la (7- 1 7) para el espesor del diente del pinon en su circulo depaso de 6 pulg, se obtiene
t2 = 2e tan 4> + pi. = (2)(0.298 1) tan 200 + 3-.1416 2- 1 .7878 pulgEl lingulo de presi6n al que estos engranes (y s610 estos engranes) operaran seencuentra a partir de la ecuaci6n (7- 1 8), .1.. ' _ NZ(t2 + (3) - 21Trz+ . .I.. mv "P - 2rz(Nz + N3) mv "P= 12(1.7878 + 1.5708) - 21T6 + . 200 = 0 019 077 d(2)(6)(1 2 + 40) mv . raDe la tabla 6 del apendice se obtiene4>' = 2 1 .65 1 10

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 266/508
290 TEORIA DE MAQUINAS Y MECANISMOSSi se usan las ecuaciones (7- 1 9) y (7-20), se encuentra que los nuevos radiosde pasoson, 1'2 cos </J 6 cos 20°1'2 =
cos </J '=cos 21.651 1° := 6.0662 puIg1" = 1'3 cos </J = 20 cos 20°= 20 220 pulg3 cos </J' cos 2 1 .651 1°.De manera que la nueva distancia entre los centros esr; + r; = 6.0662 + 20.220 := 26.286 pulgN6tese que no se increment6 la distancia entre los centros tanto como la excentricidaddel cortador de cremallera.
AI principio se especific6 una holgura de 0.25IP, 10 que hizo que los dedendaesUmdar fueran iguales a 1 .251P. Asi pues, los radios de raiz de los dos engranessonRadio de raiz del pifi6nRadio de raiz del engraneSuma de los radios de raiz6.298 1 - 1 .25 = 5.0481 pulg20.0000 - 1.25 = 18.7500pulg= 23.798 1 pulgLa diferencia entre esta suma y la distancia entre los centros es la altura de trabajomas dos veces la holgura. Puesto que la holgura es 0.25 puig para cada engrane,
laaltura de trabajo es26.286 - 23.7981 - (2)(0.25) = 1.9879 inpuigEl radio exterior de cada engrane es la suma del radio de raiz, la holgura y laalturade trabajo,Radio exterior del pii'i6n = 5.048 1 + 0.25 + 1.9879 = 7.2860 puigRadio exterior del engrane = 18.75 + 0.25 + 1.9879 = 20.9879 pulgEI resultado se ilustra en la figura 7-22 y se ve que el pifi6n tiene una formadeaspecto mas fuerte que la del pifi6n de la figura 7-20. Se ha eliminado por comp
letola socavaci6n . Se puede obtener la raz6n de contacto utilizando las ecuaciones(7-7) a (7-9) . Se necesitan las siguientes cantidades:Radio exterior del pifi6n = r; + a = 7.2860 pulgRadio exterior del engrane = r3 + a 20.9879 puIg1'1l-; = r2 cos </J = 6 cos 20° = 5.6381 puIg1'1>; = r3 cos </J = 20 cos 200 = 18.7938 puIgPb = Pc cos </J = 3. 1416 cos 20° 2.952 1 puIg

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 267/508
ENG RANES RECTOS 0 cILlNDRICOS 291Figura 7-22Luego, se tiene queUa = [(rj + a )2 dl]1I2 - rj sen</J'= [(20.9879l - (l8.7938)2]112 20.220 sen21.65 1 1° = 1 .8826 pulgUr = [(r2 + af - dz]1I2 r2 sen </J'
= [(7.2860)2 - (5.6381)2]112 6.0662 sen 2 1 .65 1 1<> == 2.3247 pulgPor ultimo, segUn la (7-7), la raz6n de contacto es== Ua + Ur = 1 .8826 + 2.3247 me == 1 425Pb 2.9521 .Por ende, la raz6n de contacto se ha incrementado sOlo ligeramente. No obstante, la modificaci6n se justifica porque se elimina la socavaci6n y se produce unamejora sustancial en la resistencia del diente.Sistemas de addendum largo y corto En el diseiio de maquinaria sucede con frecuenciaque la distancia entre los centros, entre un par de engranes, la fija otracaracteristica de la maquina. En tales casos es imposible hacer modificaciones p
araobtener un mejor funcionamiento . alterando la distancia entre los centros.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 268/508
292 TEORIA DE MAQUINAS Y MECANISMOSEn la seccion anterior se ha visto que se puede obtener una accion y formamejoradas del diente, haciendo retroceder el cortador de cremallera respecto aldiscoen blanco del pinon. EI efecto de este retroceso es crear el perfil activo del diente
a una distancia mayor del circulo de base. S i se examina la figura 7-22, se observanique se podria usar un dedendum mayor en el engrane (no en el pinon) antesde llegar al punto de interferencia. S i se hace avanzar el cortador de cremallerahacia el disco en blanco del engrane, una distancia igual a la excentricidad respectoal disco en blanco del pinon, se usani mas del dedendum del engrane y, al mismotiempo, no se habra cambiado la distancia entre los centros. Esto se conoce como sistema de addendum largo y corto .En el sistema de addendum largo y corto no se registra cambio alguno en los
circulos de paso y, en consecuencia, tampoco en el angulo de presion. EI efectoconsiste en alejar la region de contacto del centro del pinon, acercandola al centrodel engrane, acortando asi la accion de aproximacion y alargando la de retroceso.Las caracteristicas del sistema de addendum largo y corto se pueden explicarcon referenda a la figura 7-23. En la figura 7-23a se ilustra un j uego convencional(estflndar) de engranes que tiene un dedendum igual al addendum mas la holgura.Existe interferencia. y tendra que rebajarse la punta del diente del engrane como seindica, 0 el pinon sufrira una socavacion. Esto se debe a que el circulo de addendum
del engrane cruza la linea de presion en D. afuera del punto de tangencia 0interferencia C; por consiguiente, la distancia CD es una medida del grado de interferencia.Para eliminar la socavacion 0 interferencia, se ha agrandado el addendum delpiii6n en la figura 7-23b, hasta que el circulo de addendum del piii6n pasa parelpunto de interferencia (punta A) del engrane. De esta manera se estani usandotodo el perfil del diente del engrane. Se conserva la misma altura total; por ende,se reduce el dedendum del pinon en la misma cantidad en que se incrementa el addendum.Esto significa que ahara se debe alar gar el dedendum del engrane y acortar
el addendum. Con estos cambios, la trayectoria de contacto es la recta BD de lafigura 7-23 b ; esta es mas larga que la trayectoria Be de la figura 7-23a, y, por consiguiente,la razon de contacto es mayor . Notese tambien que no han cambiado loscirculos de base, los de paso, el angulo de presion y la distancia entre los centros.Ambos engranes se pueden cortar con cortadores estflndar , haciendolo avanzarhacia el disco en blanco del engrane una distancia igual a la magnitud del retroceso, para esta modificacion, en relacion con el disco en blanco del pinon. Por ultimo,notese que los discos en blanco de los que se cortan los engranes tienen ahoradiametros distintos a los estandar.
Ahora se pueden determinar las dimensiones del diente para el sistema de addendumlargo y corto aplicando las ecuaciones desarrolladas en las secciones

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 269/508
previas.Una ventaja menos obvia del sistema de addendum largo y corto es que se obtieneuna mayor accion de retroceso que de aproximacion. La acci6n de aproximacionde los dientes de engrane es analoga a la de empujar un trozo de tiza sabreun pizarr6n; se provoca un chir rido. Por el contrario, cuando se tira del gis sobre

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 270/508
(a),03..ENGRANE'-' rfi "=--==!== D "-
'" "" '\ ' \ PIOON' \" \ ..rrculo de bas \--\ \ \(b)-!ra;-JENGRANEcrrculo de baseAddendum /z- ---- ---/ ../ , / Addendum'\ PlfilON \\ Crrculo de base..\ - - ' °2Figura 7-23 Comparaci6n de los engranes estfmdar y los cortados mediante el sistema de addendum largo y corto : a) engrane y pif\6n con
addendum y dedendum est!mdar, b) engrane y pif\6n con addendum largo y corto.t!1 5 .. rn..("') d CIlo("')F Z .. (=5CIlo ..

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 271/508
294 1EORtA DE MAQUINAS Y MECANISMOSel pizarron , se desliza con suavidad ; esta accion es amlloga a la de retroceso. Porconsiguiente , siempre se prefiere la accion de retroceso debido a la suavidad ya lasfuerzas de friccion menores .
El sistema de addendum largo y cor to no ofrece ventaja alguna si los engranesacoplados son del mismo tamano. En esta situacion , el incrementar el addendumde uno de los engranes tan solo produciria una mayor socavacion en el otro.Asimismo, es obvio que el engrane menor del par debe ser el impulsor si se desea obtener las ventajas de la accion de retroceso .7-12 PERFIL CICLOIDALEl perfil cicloidal se utilizo profusamente en la fabricacion de engranes haceaproximadamente un siglo, en virtud de la facilidad para producirlos por fundicion.En la actualidad se usa solo en raras ocasiones por razones que se explicaranen esta seccion.
En la figura 7-24 se muestra la construccion de un perfil cicloidal. Dos circulosgeneradores, representados por lineas a trazos, ruedan sobre el interior y el exterior,respectivamente, del circulo de paso y generan el flanco hipocicloidal y lacara epicicloidal del diente del engrane . Estos dos mismos circulos sirven tambienpara generar el perfil de los dientes del pinon correspondiente; pero ahora se invierteel papel de los circulos generadores. El circulo que genero el flanco del diente del engrane genera ahora la cara epicicloidal del diente del pinon. Y, del mismo
modo, el circulo que genero la cara del diente del engrane genera ahora el flanco deldiente del pifi6n.Cfrculo de paso del engraneFigura 7-24 Generaci6n de dientes cicloidales sobre un engrane.
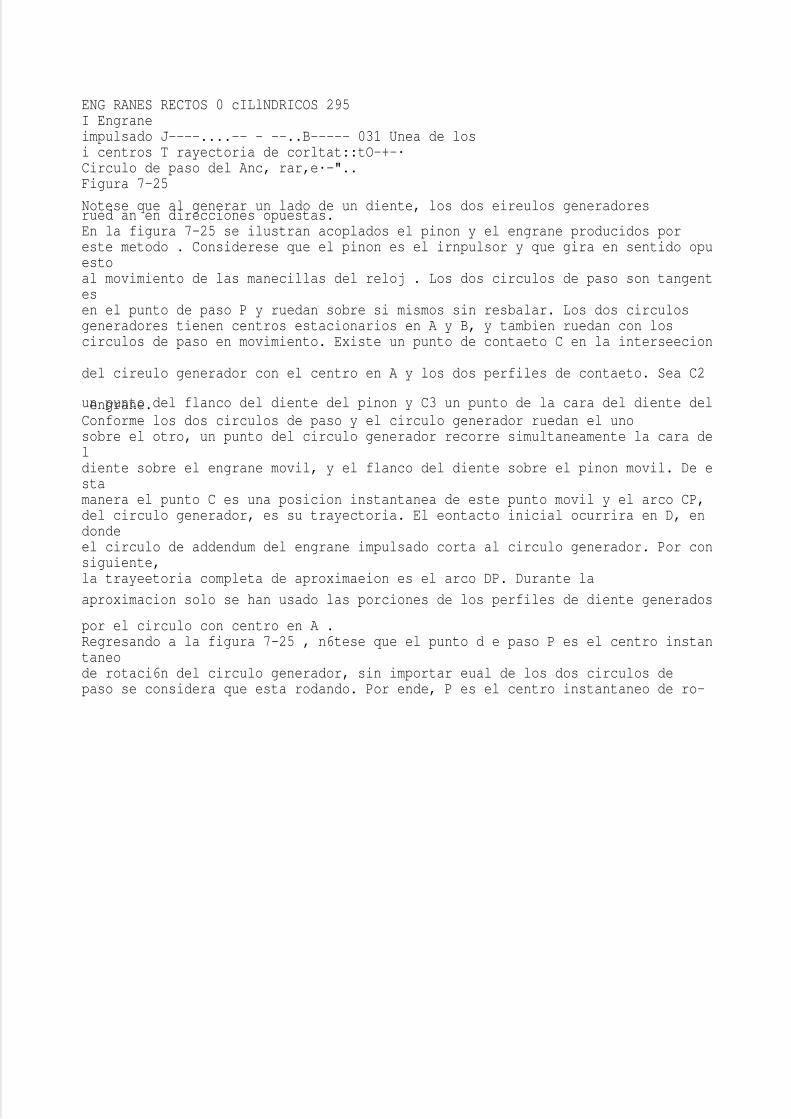
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 272/508
ENG RANES RECTOS 0 cILlNDRICOS 295I Engraneimpulsado J----....-- - --..B----- 031 Unea de losi centros T rayectoria de corltat::tO-+-·Circulo de paso del Anc, rar,e·-"..Figura 7-25
Notese que al generar un lado de un diente, los dos eireulos generadoresrued an en direcciones opuestas.En la figura 7-25 se ilustran acoplados el pinon y el engrane producidos poreste metodo . Considerese que el pinon es el irnpulsor y que gira en sentido opuestoal movimiento de las manecillas del reloj . Los dos circulos de paso son tangentesen el punto de paso P y ruedan sobre si mismos sin resbalar. Los dos circulosgeneradores tienen centros estacionarios en A y B, y tambien ruedan con loscirculos de paso en movimiento. Existe un punto de contaeto C en la interseecion del cireulo generador con el centro en A y los dos perfiles de contaeto. Sea C2
un punto del flanco del diente del pinon y C3 un punto de la cara del diente delengrane.Conforme los dos circulos de paso y el circulo generador ruedan el unosobre el otro, un punto del circulo generador recorre simultaneamente la cara deldiente sobre el engrane movil, y el flanco del diente sobre el pinon movil. De estamanera el punto C es una posicion instantanea de este punto movil y el arco CP,del circulo generador, es su trayectoria. El eontacto inicial ocurrira en D, endondeel circulo de addendum del engrane impulsado corta al circulo generador. Por consiguiente,la trayeetoria completa de aproximaeion es el arco DP. Durante la
aproximacion solo se han usado las porciones de los perfiles de diente generados por el circulo con centro en A .Regresando a la figura 7-25 , n6tese que el punto d e paso P es el centro instantaneode rotaci6n del circulo generador, sin importar eual de los dos circulos depaso se considera que esta rodando. Por ende, P es el centro instantaneo de ro-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 273/508
296 TEORtA DE MAQUINAS Y MECANISMOStacion del punto C, sobre el circulo generador, y, en consecuencia, la recta PCesnormal a los dos perfiles de diente; como los dos engranes giran, siempre se cumpliniesto. Por consiguiente, el engranaje cicloidal satisface la ley del engranaje en
que la normal al perfil de diente pasa siempre por el punto de pasoNo obstante, notese que la recta PC, que es la linea de presi6n, no tendra unainclinaci6n constante. Conforme el punto de contacto se acerca al de paso, la lineade presion tiende a la perpendicularidad con la linea de los centros.Durante la acci6n de retroceso el circulo generador con centro en B es el queactua. El contacto se produce sobre la cara del diente del pinon y el flanco del diente del engrane. Notese que cada uno de estos perfiles es generado por el circuloque dene su centro en B. Durante el retroceso, la linea de presi6n gira regresan
dohacia una inclinaci6n similar a la que tuvo durante la aproximaci6n. EI punto finalde contacto se localiza en E, en donde el circulo de addendum del pifi6n se intersecacon el circulo generador. Por ende, la trayectoria de contacto durante elretroceso es la distancia PE a 10 largo del arco.El angulo de presi6n variable del diente cicloidal genera ruido y desgasteadicionales, y tambien produce cambios en las reacciones sobre el cojinete en lossoportes del eje. Del mismo modo, la doble curvatura que ocurre con frecuenciaintroduce problemas en el corte de los dientes, que no se presentan can la formade
involuta . Para que funcionen con propiedad, los engranes cicloidales se debenoperar exactamente a la dis tancia correcta entre los centros porque, de 10 contrario,las porciones que entran en contacto de los perfiles no senin conjugadas.Puesto que de necesidad ocurren deflexiones debido a la transmisi6n de carga,sena virtual mente imposible mantener la distancia correcta entre los centros bajotodas las condiciones de carga. Por 10 tanto, en la mayor parte de las aplicacionesexistentes, parece que la forma cicloidal de los dientes tiene poco que ofrecerencomparaci6n con el perfil de involuta.
PROBLEMAS7-1 Determ1nese el paso diametral de un par de engranes cuya distancia entre loscentros es de 0. 362 5puig. Los engranes tienen, respectivamente, 32 y 84 dientes.7-2 Encuentrese el numero de dientes y e1 paso circular de un engrane con un diametro de paso de6 pulg y cuyo paso diametral es 9.7-3 Determinese e1 m6dulo de un par de engranes cuya distancia entre los centroses de 58 mm. Los engranestienen 18 y 40 dientes, respectivamente.7-4 Encuentrese el numero de dientes y el paso circular de un engrane cuyo diametro es de 200 mm,si el modulo es 8 mm par diente.
7-5 l.CuaIes son el paso diametral y el diametro de paso de un engrane de 40 dientes cuyo paso circulares de 3 .50 pulg?

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 274/508
7-6 Los diametros de paso de un par de engranes acoplados son 31 Y 8l puIg, respectivamente. Si el pasodiametral es 16, l.cuantos dientes hay en cada engrane?7-7 Encuentrese eI modulo y el diametro de paso de un engrane cuyo paso circulares de 40 mm, si elengrane tiene 36 dientes.7-8 T"OS diametros de paso de un par de engranes son de 60 y 100 mm, respectivam
ente. Si eI m6dulo es2.5 mm por dientes, l.cuantos dientes hay en cada engrane?
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 275/508
ENGRANES RECTOS 0 CILINDRICOS 2!n7·' (,Cu{ll es el diametro de un engrane de 33 dientes si el paso circular es de 0.875 pulg?7·10 Un eje sostiene un engrane de 30 dientes con paso diametral de 3, el cual impulsa a otro engrane auna velocidad de 480 rpm. i,A que velocidad gira el engrane de 30 dientes si la
distancia entre los centrosde los ejes es de 9 puIg?7·11 Dos engranes que tienen una raz6n de velocidades angulares de 3 : 1 estan montados sobre ejescuyos centros estan separados 1 36 mm. Si el modulo de los engranes es 4 mm, l,cuantos dientes tienecada engrane?7·12 Un engrane que tiene un modulo de 4 mm por diente y 21 dientes impulsa a otrocuya velocidad esde 240 rpm. (,Con que rapidez gira el engrane de 21 dientes si Ia distancia entre los centros de los ejes esde 1 56 mm?
7-13 Un pinon de 24 dientes con un paso diarnetral de 4 debe impulsar a un engrane de 36 dientes. Losengranes se cortan en el sistell1a de involuta de 20° y altura completa. Hagase undibujo de los engranespresentando un diente de cada uno de ellos. Calculense y tabulense el addendum,el dedendum, la holgura, el paso circular, eJ espesor del diente y los diametros de los circulos de base; asimismo, las trayectoriasde aproximaci6n, retroceso y accion; asi como la razon de contacto y el paso debase.7-14 Un pifi6n de 15 dientes y paso diametral de 5 se va a acoplar can un engrane interno de 30 dientes.Ambos son de involuta de 20°, de altura completa. Hagase un dibujo de los engranes
mostrando variosdientes de cada uno. l,Es posible montar estos engranes en direcci6n radial? Deno ser asi, l,que remediose debe apUcar?7-1S Se acopla un pifi6n de 17 dientes y un paso diametral de 2! , a un engranede 50 dientes. Ambosse cortan en el sistema de involuta de 20° y de altura completa. Hagase un dibujode los engranes mostrandoun diente de cada uno de eUos. Encuentrense los arcos de aproximaci6n, de retroceso y de acci6n,as! como la raz6n de contacto, obteniendo directamente los datos del dibujo.7·16t Un juego de engranes tiene un modulo de 5 mm por diente, es de dientes de al
tura completa y un:ingulo de presion 22..o , y tiene 19 y 31 dientes, respectivamente. Hagase un dibujo de los engranespresentando un diente de cada uno de ellos. Osese 1 .0 m para el addendum y 1.35m para el dedendum.Tabulense el addendum, el dedendum, la holgura, el paso circular, el espesor deldiente, el diametro delcirculo de base, el paso de base y la rawn de contacto.7.17' Un engrane tiene un m6dulo de 8 mm por diente y 22 mentes, y se acopla conuna cremallera. EIaddendum y el dedendum son, respectivamente, 1 .0 m y 1 .25 m; el angulo de presion es de 25° . Hagaseun dibujo presentando los dientes acoplados y midanse las longitudes de la traye
ctoria de aproximacion,la de retroceso y la trayectoria total de contacto sobre la linea de acci6n. i,Cual es la raz6n de contacto?
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 276/508
7·18 Repitase el problema 7-15, utilizando en esta ocasion el sistema de 25° de altura completa.7·19 Dibujese un engrane de 26 dientes y paso diametral 2 acoplado con una cremallera. Los engranesson de involuta de 20° y de altura completa.a) Encuentrense los areas de aproximacion, de retroceso y de accion, asi como laraz6n de contacto.
b) Dibujese una segunda cremallera acoplada al mismo engrane; pero con una excentricidad de 1 /8pulg hacia afuera del centro del engrane. Determinese la nueva raz6n de contacto. ;,Se registr6 algUncambio en el Angulo de presi6n?7·20 a 7·24 Los cortadores limadores para engranes tienen la ventaja de que se pueden usar tanto paraengranes exteriores como interiores, y tambien de que s6lo se necesita una pequel'la carrera en vacio alfinal de la carrera. Se puede simular con facilidad la acci6n generadora de un cortador limador parapinon empleando una hoja de plastico trans parente. En la figura se ilustra un d
iente de un cortador depinones de 16 dientes, con un lingulo de presi6n de 20°, tal y como se puede cortar a partir de una hojade plastico. Para construir el cortador, tracese el diente en una hoja de papelde dibujo. Asegurese deincluir la holgura en la parte superior del diente. Tracense rectas radiales a traves del circulo de paso,espaciadas a distancias iguales a la cuarta parte del espesor del mente, como semuestra en la figura.t En el S I , las dimensiones de los dientes se dan en m6dulos , m. Por ende, a= 1 .0 m significa 1m6dulo y no I metro .

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 277/508
298 TEORIA DE MAQUINAS Y MECANlSMOSProblemas 7-20 Y 7-24Ahora, sujetese el plastico sobre el dibujo y grabese la figura por recortar, elcirculo de paso y las rectasradiales sobre la hoja. A continuacion se retira esta y se recorta el perfil deldiente con una hoja de
rasurar. Se debe usar despues un trozo pequeno de lija fina para eliminar cualquier rebaba.Para generar un engrane con el cortador, 10 iinico que se necesita trazar es elcireulo de paso y el deaddendum. Divldase el circulo de paso en espacios iguales a los que se usaron enla plantilla y tracenserectas radiales por 10 puntos de division. Entonc.. se obtienen los perfiles delos dientes haciendo £Odarel circulo de paso de la plantilla sabre el del engrane, y trazando con suavidadel diente del cortadorpara cada posici6n. El diente generado resultante sabre el engrane quedara marClido con toda daridad.
Todos los problemas que siguen emplean una plantilla estandar de paso diametral1 y altura completa,como la que se aeaba de deseribir. En cada easo generense unos cuantos dientes yestimese la magnitudde la socavaci6n.Niimero del problema Niimero de dientes7-207·217·227·237·241012
1420367-25 t Un engrane con un m6dulo de 1 0 mm tiene 1 7 dientes, un angulo de presion de 20°, un adden·dum de 1 .0 m y un dedendum de 1 .25 m. Determinese el espesor de los dientes enel circulo de base y enel de addendum. l.CuaI es el angulo de presion correspondiente al circulo de addendum?7·26 Un pin6n de 15 dientes tiene 1 . 5 de paso diametral y dientes de altura eompleta de 20°. Calculeseel espesor de los dientes en el cireulo de base. l.Cuaies son el espesor y el an
gulo de presi6n en el cireulode addendum?7-27 Un diente tiene un espesor de 0.785 pulg a un radio de 8 puig y un angulo de presi6n de 25° . l.Cuttles el espesor en el eireulo de base?7-28 Un diente tine 1 . 37 pulg de espesor en el radio de paso de 1 6 pulg, y unangulo de presi6n de 20Q.l,A que radio se haee puntiagudo el diente?7-29 Un pin6n de involuta de 25° y un paso diametral de 12 dene 18 dientes. Ca\Culese el espesor de losdientes en el circulo de base. l.CuaI es el espesor y el angulo de presi6n en elcireulo de addendum?t Vease la nota al pie de la p. 297.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 278/508
ENGRANES RECTOS 0 CILtNDRICOS 2997-30 Se debe cortar un pii'i6n especial de 10 dientes y paso diametral de 8, conun angulo de presi6n de221 12°. ;..Que addendum maximo se puede usar antes de que los dientes se hagan puntiagudos?7-31 Se puede medir la exactitud en el corte de los dientes de engrane ajustando
clavijas endurecidas yrectificadas en espacio entre dientes diametralmente opuestos, y midiendo la distancia sobre estasclavijas. Un engrane tiene 96 dientes y un paso diametral de 10, y se corta siguiendo el sistema de involutade altura completa y 20°.a) Calculese el diametro de la clavija que h..ra contacto con los dientes en laslineas de paso, si nose perm ite juego alguno entre dientes.b) Si el engrane se corta con exacdtud, i,cuftl debe ser la distancia medida sobre las clavijas?7-32 Se corta un juego de engranes intercambiables siguiendo el sistema de invol
uta, de 20° y alturacompleta, con un paso diametral de 4. Los engranes tienen 24, 32, 48 y 96 dientes. Calculese, para cadaengrane, el radio de curvatura del perfil de los dientes, tanto en el circulo depaso como en el de addendum.7-33 Calculese la raz6n de contacto de un pift6n de 1 7 dientes que impulsa a unengrane de 73 dientes.Los engranes tienen un paso diametral de 96 y se cortaron apJicando el sistema de paso fino de 20° .7-34 Un piMn especial de 1 1 dientes y angulo de presi6n de 25° debe impulsar un engrane de 23 dientes.Los engranes tienen un paso diametral de 8 y son de dientes truncados. ;,Cual esla raz6n de contacto?
7-35 Un pifi6n de 22 dientes se acopla con un engrane de 42 mentes. Los engranesson de altura completa,denen un paso diametral de 16 y se cortan con un angulo de presi6n de Encuentrese laraz6n de contaeto.7-36 Un par de engranes acoplados tienen un paso diametral de 24 y se produjeroncon el sistema de20°. Si el numero de dientes es IS y SO, l,que addenda maximos pueden tener si nodebe ocurrir interferenda?7-37 Se produce un fuego de engranes por fundici6n con un angulo de presi6n de !7!o y un paso circularde 4! pulg. El pii'i6n tiene 20 dientes de altura completa. Si el engrane cuenta
con 240 dientes,leua! debe ser su addendum para evitar la interferencia?7-38 Con el metodo descrito en el problema 7-20, cortese un diente de cremallerade altura completa,con un paso diametral de I y un Angulo de presi6n de 20°, utilizando una hoja de plastico transparente.Usese una holgura modificada de 0.351P para obtener un claflan mas fuerte. Se puede usar esta plantillapara simular la acci6n generadora de una fresa maestra. Ahora, con el sistema dedistancia variableentre los centr..s, generese un pifl6n de 1 1 dientes para que se acople con unengrane de 25 dientes sininterferencia. An6tense los valores hall ados para la distaneia entre los centro
s, los radios de paso, el angulode presi6n, los diametros de los discos en blanco, la excentricidad del cortadory la razon de contacto.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 279/508
Observese que existe mas de una soluci6n satisfactoria.7·39 Con la plantilla que se eonstruy6 en el problema 7-38, generese un pifi6n de1 1 dientes paraacoplarlo con un engrane de 44 dientes, aplicando el sistema de addendum largo yeorto. Determinensey an6tense valores apropiados para el addendum y el dedendum del engrane y e! pifi6n, y para la excentricidad
del cortador y la raz6n de contacto. Comparese la raz6n de eontacto con la que se habria obtenidosi se hubieran empleado engranes estfmdar.7-40 Un pifi6n estandar de 20 dientes, con un paso diametral de 1, altura completa y un angulo depresion de 20.. impulsa a un engrane de 48 dientes. La velocidad del pii'i6n esde 500 rpm. Usando lalongitud de la trayectoria de contacto como abscisa, tracese una curva que muestre la velocidad dedeslizamiento, cambia de signo cuando el pun to de eontacto pasa por el punto depaso.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 280/508
CAPITULOOCUOENGRANES HELICOIDALES, DE GUSANO Y CONlCOSLa mayoria de los ingenieros prefieren utilizar engranes re,tos cuando es precisotransferir potencia entre ejes paralelos, porque son mas faciles de diseiiar y,
amenudo, su fabricacion mas economica; pero a veces las necesidades del diseiioson tales que los engranes helicoidales resultan la mejor opcion. Esto es ciertosobretodo cuando se trata de cargas pesadas, altas velocidades 0 cuando se debe mantenerbajo el nivel de ruido.Cuando se debe transmitir movimiento entre ejes que no son paralelos, no sepuede utilizar el engrane recto; el diseiiador debe elegir entonces entre los engraneshelicoidales cruzados, de gusano, conicos 0 hipoidales. Los engranes conicostienen dientes rectos, contacto lineal y eficiencias altas. Los engranes helicoi
dalescruzados y los de gusano tienen una eficiencia mucho menor debido a que se incrementala acci6n de deslizamiento; sin embargo, si se emplean buenos principiosde ingenieria, se pueden diseiiar engranes helicoidales cruzados y de gusano con valores bastantes aceptables de la eficiencia. Los engranes hipoidales y los conicosse emplean en aplicaciones similares, y aunque los hipoidales cuentan con dientesinherentemente mas fuertes, la eficiencia es con frecuencia mucho men or. Los engranesde gusano se empleart cuando se requieren razones de velocidades elevadas.
8-1 ENGRANES HELICOIDALES DE EJES PARALELOSLos engranes helicoid ales se usan para transmitir movimiento entre ejes no paralelosy paralelos. Cuando se emplean con ejes no paralelos reciben el nombre deengranes helicoidales cruzados; y se estudian en la secci6n 8-6.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 281/508
ENGRANES HELICOIDALES, DE GUSANO Y C6NICOS 301l/Ib=anguloFigura 8-1 Helicoide de involuta.La forma de los dientes de un engrane helicoidal es un helicoide de involuta,como la que se ilustra en la figura 8-1. Si se corta un trozo de papel dimdole la forma
de un paralelogramo y se enrolla alrededor de un cilindro, el borde angular delpapel se convierte en una helice. Si a continuaci6n se desenrolla el papel, cadapuntode la orilla angular genera una curva involuta. La superficie obtenida cuandocada punto de la orilla genera una involuta recibe el nombre de helicoide de involuta.EI contacto inicial de los dientes de engranes rectos es una recta que se extiendea todo 10 largo sobre la cara del diente. EI contacto inicial de los dientes deengraneshelicoidales es un punto que se convierte en una recta conforme los dientesse encastran mas; en los engranes helicoidales, la recta es diagonal a traves de
lacara del diente. Es este encastramiento gradual de los dientes y la suave transferenciade la carga de un diente a otro 10 que les confiere a los engranes helicoid aleslacapacidad de transmitir cargas pesadas a velocidades elevadas.Se obtienen los engranes de helice doble (llamados tambien de espina de pescado) cuando para cada engrane se cortan dientes derechos e izquierdos en el mismodisco en blanco y funcionan en ejes paralelos. Las fuerzas de empuje en lasmitades derecha e izquierda son iguales y opuestas y se cancelan entre si.8-2 RELACIONES ENTRE LOS DIENTESDE ENGRANES HELICOIDALES
En la figura 8-2 se representa una porci6n de la vista superior de una cremallerahelicoidal. Las rectas AB y CD son las lineas de los centros de dos dientes helicoidalesadyacentes, tomadas sobre el plano de paso. El angulo '" es el angulo dehelice y se debe medir en el diametro de paso, a menos que se especifique otracosa. La distancia AC es el paso circular transversal PI en el plano de rotaci6n. La

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 282/508
302 TEORIA DE MAQUINAS Y MECANISMOSdistancia AE es el paso circular normal Pn Y se relaciona con el paso circular transversalcomo sigue:Pn PI cos 1/1La distancia AD se denomina paso axial Px Y es
(8-1)(8-2)Secci6n A-AFigura 8.2 Relaciones entre los dientes en unengrane helicoidal.Puesto que P"Pn = 1T, el paso diametral normal esPn = cos 1/1 (8-3)en donde PI es el paso diametral transversal.Debido a la angularidad de los dientes, se deben definir dos angulos depresion. Estos son el angulo de presion transversal <PI y el angulo de presion normal<Pn, como se ilustra en la figura 8-2. Ambos se relacionan por medio de

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 283/508
ENGRANES HELICOIDALES, DE GUSANO Y CONICOS 303cos '" == tan <Pntan <Pt (8-4)Al aplicar estas ecuaciones conviene recordar que todas las ecuaciones y relacionesque son v{llidas para los engranes rectos, se aplican de la misma manera para el
plano transversal de un engrane helicoidal.Se puede lograr una mejor imagen de las relaciones entre los dientes a travesde un exam en minucioso de la figura 8-3. Con el fin de obtener las relacionesgeometric as , se ha cortado un engrane helicoidal mediante el plano oblicuo AAque forma un angulo '" con una secci6n transversal normal. Para mayor conveniencias610 se muestra el cilindro de paso de radio r. La figura muestra que la intersecci6ndel plano y el cilindro de paso produce una elipse cuyo radio en el puntode paso Pes reo Este se conoce con el nombre de radio de paso equivalente, y esel
radio de curvatura de la superficie de paso en la secci6n transversal normaL Parala condid6n de que I/J == 0, este radio de curvatura es r. Si se piensa en que el linguloI/J aumenta lentamente desde 0 hasta 90°, se ve que 'e principia en un valorde r y se incrementa hasta que re = 00. cuando '" = 90°.Se puede demostrar t que,r ---- - cos2 '" (8-5)en donde r es el radio de paso del engrane helicoidal Y 'e es el radio de paso de unengrane recto equivalente. Este engrane equivalente se toma sobre la secci6n normal
del engrane helicoidal. Definamos el niimero de dientes en el engrane helicoidal como Ny en el engrane recto equivalente, como Ne Por 10 tanto,(d)t La ecuaci6n de una elipse can su centro en el origen de un sistema xy, siendoa y b el semiejemayor y el semieje menor, respectivamente, es(a)Asimismo, la f6rmula para el radio de curvatura es[1 + (dyldx)2]312P = d2yldx2 (b)Si se usan estas dos ecuaciones, no es dificil hallar el radio de curvatura corr
espondiente a x = 0 yy b. EI resultado esAhora, can referencia a la figura 8-3, se sustituye a r /(cos "') y b = r en laecuaci6n (c) y seobtiene la ecuaci6n (8-5).

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 284/508
304 TEORIA DE MAQUINAS Y MECANISMOSC!rculo equivalente \ Figura 8·3en donde de = 2re es el diametro de paso del engrane recto equivalente. Asimismo,Ia (d) se puede escribirN-_d .._..
e - cos2 t/J cos t/J - cos3 t/J8-3 PROPORCIONES DE LOS DIENTESEN LOS ENGRANES HELICOIDALES(8-6)Excepcion hecha de los engranes de paso fino (con un paso diametral de 200 masfino), no existe un esUmdar para las proporciones de los dientes de engranes helicoidales.Una de las razones de esto es que resulta mas barato cambiar el disefioligeramente que comprar herramientas especiales. Puesto que, de todas maneras,los engranes helicoidales rara vez se usan en forma intercambiabIe; y dado queexisten muchos disefios diferentes que funcionan bien juntos, en reaiidad se obtienen
pocas ventajas en haeerlos intereambiables.Como regIa general, las proporciones de los dientes se deben basar en un angulode presion normal de 20°; de modo que se pueden usar la mayor parte de lasproporciones presentadas en la tabla 7-1. Las dimensiones de dientes se deben calcularutilizando el paso diametral normal. Estas proporciones son adecuadas paraangulos de beliee desde 0 hasta 30°, y todos los angulos de heliee se pueden cortar

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 285/508
ENGRANES HELICOIDALES, DE GUSANO Y CONICOS 305con Ia misma fresa maestra. Por supuesto, el paso diametral normal de la fresamaestra y del engrane deben ser iguales.Es factible basar un conjunto opcional de proporciones en un angulo depresi6n transversal de 20° y el uso del paso diametral transversal. Para estas, los
{mgulos de belice se restringen comiinmente a 15, 23,30045°. No se recomiendananguIos mayores de 45°. Todavia debe seguirse utilizando el paso diametral normalpara calcular las dimensiones de los dientes. Las proporciones dadas en latabla 7-1 por 10 Muchos especialistas recomendaban que la anchura de Ia cara delos engraneshelicoidales fuera por 10 verdadera acci6n de engrane helicoidal. Una excepci6na esta regIa son los engranesautomotrices que tienen una anchura de cara considerablemente menor, ylos engranes marinos de reducci6n, que con frecuencia tienen una anehura de cara mucho mayor.Conviene hacer notar tambien que en un juego de engranes helicoidales paralelos,
los dos deben tener el mismo angulo de heliee y el mismo paso, y deben serde mana opuesta. La raz6n de velocidades se determina al igual que en el caso de los engranes rectos.84 CONTACTO DE LOS DIENTESEN WS ENGRANES HELICOIDALESLos dientes de engranes rectos acoplados entran en contacto en una recta que esparalela a sus ejes de rotaci6n. Como se indica en la figura 8-4, el contacto entrelos dientes de engranes helicoidaies es una recta diagonal.Figura 8·4 Mientras que en A apenas se inicia el contacto,en el otro extreme del diente ya ha avanzado desde B
hastaC.Existen varias clases de razones de contacto que se USan para evaluar el des·empefio 0 rendimiento de los engranes helicoidales. La raz6n de contacto transversalse designa por m y es la raz6n de contacto en el plano transversal. Estaraz6n se obtiene exactamente en la misma forma que para los engranes rectos.La raz6n de contacto normal mn es la raz6n de contacto en la secci6n normal;y tambien se encuentra exactamente en la misma forma que para los engranes rectos;pero en la determinaci6n se deben usar engranes rectos equivalentes. EI angulode helice de base!/lb y el angulo de helice de paso !/I, para los engranes helicoidales,
se relacionan mediante

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 286/508
306 TEORiA DE MAQUINAS Y MECANISMOStan I/Ib tan 1/1 cos cPLuego, las razones de contacto transversal y normal se relacionan mediantemcos2 I/Ib(8-7)
(8-8)La razon de contacto axial, llamada tambU:n razon de contacto de cam, es laraz6n de la anchura de cara del engrane al paso axial; esta dada porF Ftan 1/1mx = - = :....-.:..:..:.::.:....r..Px PI(8-9)en donde F es la anchura de la cara. N6tese que la raz6n de contacto de caradepende s610 de la geometria de un solo engrane, en tanto que las razones de contactotransversal y normal dependen de la geometria de un par de engranes acoplados.La raz6n de contacto total mt es la suma de las razones de contacto de cara y
transversal. En cierto sentido da el numero total promedio de dientes en contacto.8-5 ENGRANES DE ESPINA DE PESCADOLos engranes de helice doble, llamados tambien de espina de pescado, se componen de dientes con una helice derecha y otra izquierda cortadas sobre el mismodisco en blanco, como se ilustra esquematicamente en la figura 8-5. Una de lasdesventajas del engrane helicoidal simple es la existencia de cargas axiales deempuje(vease la figura 12-11); que se eliminan por medio de la configuraci6n de espina de pescado, porque la fuerza de empuje de la mitad derecha es balanceadapor la de la mitad izquierda. No obstante, uno de los miembros de un juego de en
granesde espina de pescado debe montarse siempre con cierto juego 0 flotaci6naxial para dar margen a los pequefiisimos errores de los dientes y a las toleranciasde montaje.Los imgulos de helice por 10 comun son mayores en el caso de los engranes deespina de pescado que para los engranes helicoidales simples, debido a la ausenciade las reacciones de empuje.Figura 8-5 Dibujo esquemiltico del cilindro de pasode un engrane de helice doble.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 287/508
ENGRANES HELICOIDALES, DE GUSANO Y CONICOS 3078-6 ENGRANES HELICOIDALES DE EJES CRUZADOSA veces se utilizan los engranes helicoidales cruzados, 0 de espiral, cuando las lineas entre los centros de los ejes no son paralelas ni se intersecan. Son esencialmente
engranes de gusano envolventes, porque los discos en blanco tienen unaforma cilindrica.Los dientes de los engranes helicoidales cruzados tienen contacto puntual entresi, que se convierte en un contacto lineal conforme los engranes se desgastan.Por esta raz6n s610 del contacto puntual, no es necesario que se monten con precisi6n; pueden hacersevariar la distancia entre los centros, 0 bien, el angulo entre los ejes ligeramente sinafectar la magnitud del contacto.No existe diferencia entre un engrane helicoidal cruzado y un engrane helicoidal sino hasta que se montan y acoplan entre s1; es decir, se fabrican del mismo mod
o.Un par de engranes helicoidales cruzados acoplados por 10 mano; es decir, un impulsor derecho va con un impulsado derecho. En la figura 8-6 se muestra la relaci6n entre el empuje, la mano y la rotaci6n para los engraneshelicoidales cruzados.Cuando se especifican los tamafios de los dientes, siempre se debe usar el pasonormal. La raz6n de esto es que cuando se usan angulos de heliee diferente paraelimpulsor y el impulsado, los pasos transversales no son los mismos. La relaci6ndel angulo entre los ejes y el angulo de helice esI = 1/12:!:; 1/13 (8-10)Fignra 8-6 Relaciones de empuje, rotaci6n y mano para engranaje helicoidal cruza
do. (Boston GearWorks, Inc., North Quincy, Mass.)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 288/508
308 TEO RIA DE MAQUINAS Y MECANISMOSen donde ! es el angulo entre los ejes. EI signo mas se usa cuando los dos angulosde heliee son de la misma mano y el signo menos cuando son de mano opuesta. Seusan los engranes helicoidales cruzados de mano opuesta cuando el angulo entrelos ejes es pequeno.
El diametro de paso se obtiene partiendo deden donde N = nfunero de dientesPn = paso diametral normal'" = angulo de heliceN(8-11)Puesto que los diametros de paso no se relacionan directamente con los numerosde dientes, no es factible utilizarlos para obtener la razon de velocidades angulares.Se debe obtener esta razon de la razon de los numeros de dientes.Los engranes helicoid ales cruzados tendran la veloeidad de deslizamiento mas
baja en contacto euando los angulos de helice de los dos engranes sean iguales.Silos angulos de heliee no son iguales, el engrane que Hene el mayor angulo de helicedebe utilizarse como el impulsor, si ambos engranes son de la misma mano.No hay un estandar para las proporciones de los dientes de los engraneshelicoidales cruzados; muchas proporciones diferentes ofrecen una buena accionde diente. Puesto que los dientes tienen contacto puntual, debe realizarse un esfuerzopor obtener una razon de contacto de 2 0 mas. Por esta razon, los engraneshelicoidales cruzados se cortan generalmente can un Angulo de presion bajo yeandientes profundos. Dudleyt da una lista de las proporciones de los dientes. quese
presenta en la tabla 8-1 como representativas de un buen diseno. Los numeros deTabla 8·1 Proporciones de los dientes paraengranes helicoidales de ejes cruzadosPaso diametral normalP. = 1 ;altura de trabajo2.400 pulg; altura total = 2.650 pulg; addendum1.200 pulg.ImpulsorAngulo Numero minimode helice de dienteso/I2,grados 456075
862094IAngulo de Angulo deMlice del presionimpulsado normal0/13, grados ,p .. grados4530154
1450175019.50

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 289/508
20Darle W. Dudley, Practical Gear Design, p. 1 J 1. McGraw-Hill, New York, J954.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 290/508
ENG RANES HELICOIDALES, DE GUSANO Y CONICOS 309dientes para el impulsor ahi indicados son el minimo requerido para evitar lasocavaci6n. EI engrane impulsado debe tener 20 0 mas dientes, si se desea obteneruna raz6n de contacto de 2.8-7 ENGRANAJE DE GUSANO
En la figura 8-7 se muestra una aplicaci6n de un gusano y su engrane. Estos engranesse emp1ean con ejes que no se intersecan, y que forman casi siempre un anguloentre los ejes de 90°; pero no existe raz6n alguna por la que no se puedan usarotros angulos entre los ejes, si el diseiio asi 10 requiere.EI gusano es el miembro que tiene una rosca tipo tornillo y, con frecuencia, alos dientes del gusano se les menciona como roscas. Los gusanos de uso comunHenen de uno a ocho dientes y, como se vera mas adelante, no existe una relaci6n definida entre el nfunero de dientes y e1 diametro de paso de un gusano. Los gusanosse pueden diseiiar con una superficie de paso cilindrica, como se muestra en
la figura 8-8, 0 bien, pueden tener la forma de un reloj de arena, de tal maneraqueel gusano envuelva 0 encierre parcialmente a su engrane.Figurll &-7 Gusano y su engrane de envolvente simple. (The Falk Corporation, Subsidiaria de fa SundstrandCorporation, Milwaukee, Wis.)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 291/508
310 TEO RIA DE MAQUINAS Y MECANISMOSk4' Anguif;lo ,. Angulo \. Paso axial l deavance AFigura 8-8 Nomenclatura de una combinaci6n de engranaje degusano de envolvente simple.El engrane del gusano es casi siempre el miembro impulsado del par, y sehaee de manera que envuelva al gusano. Si el engrane se acopla con un gusano
cilindrico, se dice que el conjunto es de envolvente simple. Cuando el gusano tienela forma de un reloj de arena, se dice que el conjunto es de doble envolventeporque cad a miembro envuelve al otro.Una combinaci6n de gusano y engrane es similar a un par de engranes helicoidales cruzados acoplados, excepto en que el engrane del gusano envuelve parcialmentea este. Por esta raz6n tienen un contacto lineal, en lugar del contactopuntual que se encuentra en los engranes helicoidales cruzados y, por consiguiente,son capaces de transmitir mas potencia. Cuando se usa una combinaci6n doble envolvente,
incluso se puede transmitir mas potencia, por 10 menos te6ricamente,porque el contacto ocurre sobre un area de las superficies de los dientes.En la cambinaci6n unienvolvente no existe diferencia alguna en si el gusanogira sabre su propio eje e impulsa al engrane mediante una acci6n de tornillo, 0 bien, si el gusano se traslada a 10 largo de su eje e impuisa al gusano medianteunaacci6n de cremallera. EI movimiento y el contacto resultantes son los mismos. Poresta raz6n, no es necesario que el gusano se monte exactamente sobre su eje. Sin
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 292/508
ENGRANES HELICOIDALES, DE GUSANO Y CONICOS 311embargo, el engrane debe estar correctamente montado a 10 rotaci6n; de 10 al ejedel gusano.En una combinaci6n doble envolvente, los dos miembros estan angostados y,por ende, deben montarse con exactitud en cada direcci6n con el fin de obteneruna acci6n correcta.
En la figura 8-8 se muestra la nomenclatura de un juego unienvolvente.El gusano acoplado y el engrane del gusano con un angulo entre los ejes de90° tienen la misma mano de la helice; pero los angulos de helice son por 10 bastante diferentes. En el gusano, el angulo de helice es muy grande (al menos parauno 0 dos dientes) y muy pequeno en el engrane. Debido a esto, se acostumbra especificarel anguio de avance para el gusano y el angulo de helice para el engrane.Esto es conveniente porque, para un angulo entre los ejes de 90°, ambos soniguales. EI angulo de avance de gusano es el complemento del Angulo de helice delmismo, como se indica en la figura 8-8.Al especificar el paso de los juegos de engranes de gusano, especifiquese el
paso axial del gusano y el paso circular del engrane. Cuando el angulo entre los ejes es de 90°, estos son iguales. Es bastante comiin emplear incluso fraccionespara el paso circular, como por ejemplo. !,.., t a. 1, H pulg. etc. Sin embargo, no hay razon alguna por la que no se puedan usar pasos diametrales esUmdar,como los que se utilizan para los engranes rectos. El diametro de paso del engranees el mismo que el correspondiente a los engranes rectos:en donde d3 = diametro de pasoN3 niimero de dientesp paso circulartodos tornados con referencia al engrane del gusano.
(8-12)EI diametro de paso del gusano puede tener cualquier valor; pero debe ser elmismo que el de la fresa maestra, que se use para cortar los dientes del engrane del gusano. La AGMA recomienda la siguiente relaci6n entre el diametro de pasodel gusano y la distancia entre los centros:(8-13)en donde la cantidad r2 + r3 es la distancia entre los centros. Esta ecuacion daunconjunto de proporciones que daran como resultado una buena capacidad depotencia. No es obligatorio usar la ecuaci6n (8-13); otras proporciones que tambien
daran buenos resultados y, de hecho, puede que no sea siempre la capacidadde potencia la consideracion primaria. Sin embargo, hay muchas variables en eldiseno del engrane del gusano y la ecuaci6n es lltil para obtener dimensiones ten-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 293/508
312 TEORIA DE MAQUINAS Y MECANISMOStativas. La norma AGMA t afirma tambien que el denominador de la ecuaci6n(8-13) puede variar de 1.7 a 3, sin que se afecte apreciablemente la capacidad.El avance de un gusano tiene el mismo significado que para una rosca de tornillo y es la distancia que se desplazara un punto sobre la helice cuando se hace dar
al gusano una revoluci6n completa. Por ende, para un gusano de un diente, elavance es igual al paso axial. En forma de ecuaci6n,(8-14)en donde I es el avance en pulgadas y N2 es el nfunero de dientes del gusano. EI avance y el angulo de avance estan relacionados de la manera siguiente:A =tan-I _ 1-1Td2en donde A es el angulo de avance, como se muestra en la figura 8-8.(8-15)
Los dientes de los gusanos se cortan casi siempre en una fresadora 0 en untorno. Los dientes del engrane del gusano se producen casi siempre con fresamaestra. A excepci6n de la holgura en la punta del diente de la fresa maestra, elgusano debe ser un duplicado exacto de la la fresa maestra con el fin de obtener una acci6n conjugada. Eso significa tambien que, siempre que sea posible, elgusano debe diseftarse utilizando las dimensiones de las fresas maestras existentes.Los angulos de presi6n utilizados en los juegos de engranes de gusano varianenormemente, y deben depender en forma aproximada del valor del angulo deavance. Se obtendra una buena acci6n del diente si el angulo de presi6n se hace10
suficientemente grande como para eliminar la socavaci6n del diente del engranedel gusano en el lado en el que termina el contacto. Buckingham recomienda losval ores que se dan en la tabla 8-2.Se puede obtener una altura de diente satisfactoria que siga teniendoaproximadamente la proporci6n correcta respecto al angulo de avance, haciendoque la altura sea una proporci6n del paso circular normal. Con un addendum de1/ P para engranes rectos de altura completa, se obtienen las proporciones siguientespara el gusano y el engrane del gusano:Tabla 8-2 Angulos de presion recomendadospara los engranajes degusano
Angulo deavance A, 'grados0--1616-2525-3535-45Angulo depresi6n 4>, grados141202530
t AGMA Standard 2 13.02, 1952.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 294/508
ENGRANES HELICOIDALES, DE GUSANO Y C6NICOS 313Addendum = 0.3183PnAltura completa = O.6366p ..Holgura = O.050PnLa anchura de la cara del engrane del gusano se debe obtener como se indicaen la figura 8-9. Esto hace que la cara del engrane del gusano tenga la misma 10
ngitudque una tangente al circulo de paso del gusano entre sus puntos de intersecci6ncon el circulo de addendum.Figura 8·98-8 ENGRANES CONICOS DE DIENTES RECTOSCuando se debe transmitir movimiento entre flechas 0 barras cuyos ejes se intersecan,se necesita alguna forma de engrane c6nico. Aunque con frecuencia los engranesc6nicos se fabrican para un angulo entre los ejes de 900, se pueden producircasi para cualquier angulo. Los dientes mas exactos se obtienen por generaci6n.Los engranes c6nicos tienen superficies de paso que son conos; estos conosruedan juntos sin resbalar, como se indica en la figura 8-10. Los engranes se
deben montar de tal manera que los vertices de los dos conos de paso coincidan,porque el paso de los dientes depende de la distancia radial al vertice.La verdadera forma del diente de un engrane c6mco se obtiene tomando unasecci6n esferica que pase por el wente, en donde el centro de la esfera se localice enel vertice comim, como se muestra en la figura 8-11. Por consiguiente, con formeelradio de la esfera aumenta, debe existir el mismo numero de dientes en una superfidemayor; de donde, el tamafio de los dientes aumenta conforme se toman seccionesesfericas cada vez mayores. Se ha visto que las condiciones de acci6n y contacto de los dientes de engrane rectos se pueden representar sobre una superficie

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 295/508
314 TEO RIA DE MAQUINAS Y MECANISMOSFigura 8-10 Las superficies de paso de los engranesc6nicos son conos que tienen un contacto de rodamientopuro.plana tomada a angulos rectos con los ejes de los engranes rectos. En el caso delos
dientes de engranes c6nicos, las condiciones de acci6n y contacto se deben representarsobre una superficie esferica (en lugar de una superficie plana). Inclusoes factible tomar a los engranes rectos como un caso especial de los engranesc6nicos en el que el radio de la esfera es infinito, produciendo asi una superficieplana sobre la que se representa la acci6n del diente.Es practica estandar especificar el diametro de paso de los engranes c6nicos enel extremo mayor de los dientes. En la figura 8-12 se dibujaron los conos de pasode un par de engranes c6nicos y los radios de paso se dan como '2 y 'J, respectivamente,
para el pifi6n y el engrane. Los angulos 'Y2 Y 'YJ se definen como los an-Figura 8-11 Secci6n esrerica de losdientes de engranes c6nicos.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 296/508
ENGRANES HELICOIDALES, DE GUSANO Y CGNICOS 315Cono de paso del piii6n.--.- r--r-.-----..-AFigura 8-12gulos de paso y su suma es igual al angulo entre los ejes ... La razon de velocidades
se obtiene de la misma manera que para los engranes rectos, y esWz r3 N3W3 =r;= N2En el disefio cinematico de los engranes, casi siempre se dan los numeros dedientes de cada engrane y el angulo entre los ejes, y se deben determinar los angulosde paso correspondientes. Aunque estos se pueden calcular con facilidadaplicando un metodo grafico, el procedimiento analitico proporciona valores exactos.SegUn la figura 8-12, la distancia OP se puede escribirde tal manera queo bien,
OP=..sen'Yzor OPsen 'Y3r sen 'Y2 2 '" = - (sen..::. cos 'Y2 sen 'Yz cos..)r3(a)(b)AI dividir ambos miembros de la ecuacion (b) entre cos 'Y2 y reacomodando susterminos, se obtienetsen..an'Y2 -- (r3!r2) + cos ..
sen..(8-17)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 297/508
316 TEO RIA DE MAQUINAS Y MECANISMOSDe manera analoga,senLtan 'Y3 =(N2/ N3) + cos L(8-18)
Para un angulo entre los ejes de 90° , las expre..es anteriores se reducen aN tan 'Y2 2 = -N (8-19)1 3y (8-20)La proyeccion de los dientes de engranes conicos sobre la superficie de una esferaseria, de hecho, un problema dificil y tardado. Por fortuna, se dispone de unaaproximacion que reduce el problema al de los engranes rectos ordinarios. Estemetodo se conoce como aproximacion de Tredgold y, siempre y cuando el engranetenga ocho 0 mas dientes, es 10 suficientemente exacto para fines practicos. Suaplicacion es casi universal y la terminologia de los dientes de engranes conicos se
ha desarrollado en torno al mismo.AI utilizar el metodo de Tredgold, se forma un eono posterior de elementosperpendiculares a los del cono de paso en el extremo grande del diente; 10 que seilustra en la figura 8-13. La longitud del elemento de un cono posterior se conocecon el nombre de radio del eono posterior. A continuacion se construye un engranerecto equivalente cuyo radio de paso re es igual al radio del cono posterior. Porconsiguiente, partiendo de un par de engranes conicos se puede obtener, mediante la aproximacion de Tredgold, un par de engranes rectos equivalentes, que entonce
sse usan para definir los perfiles de los dientes; tambien se pueden usar para determinarlas condiciones de accion y contacto del diente, exactamente en la mismaforma que en el caso de los engranes rectos ordinarios, y los resultados correspondefilncasi por completo con los de los engranes c6nicos. Para la geometria indicadaen la figura 8-13, los radios de paso equivalentes son'2 r = _'_3_ 'e2=cos 'Y2 '" cos 'Y3El numero de dientes en el engrane recto equivalente es
Ne = 21T'ep(8-21)(8-22)en donde p es el paso circular del engrane c6nico medido en el extremo grande de los dientes. En caso usual, los engranes rectos equivalentes no tendran un numeroentero de dientes.8-9 PROPORCIONES DE LOS DIENTESEN LOS ENGRANES CONICOSPracticamente todos los engranes c6nicos de dientes rectos que se fabrican hoy en
dia utilizan el angulo de presion de 20°. No es necesario emplear la forma de dien-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 298/508
Figura 8·13 Aproximaci6n de Tredgold.15'i5..c.0:o:8
'0Q;'5o '"1r"a(.... rn...... sngi
-<.. (5..t.U........
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 299/508
318 TEORIA DE MAQUINAS Y MECANISMOSTabla 8-3 Proporciones de los dientes, para dientes rectosde 20° de engranes conicosConceptoAltura de trabajoHolgura
Addendum del engraneRaz6n del engraneRaz6n equivalente de 90°Anchura de la caraNumero minimo de dientesFormulah 2.0' 1'c -p0.188 + 0.002 Pulg0.54 0.460 aa p+ P(m9(l)2cuando 2 = 90°m9(l cuando 2 # 9QO
F .. 0 F= 10 la que sea menor 3 PPiil6n 13Engrane 30te intercambiable porque, de cualquier manera, los engranes c6nicos no se pueden intercambiar. Por esta razen se utiliza el sistema de addendum largo y eorto quesedescribio en la seccion 7-11. En la tabla 8-3 se presenta una tabulaci6n de estasproporciones.Los engranes conicos se mont an usualmente sobre el lado exterior de loscojinetes, debido a que los ejes de las flechas se intersecan, y esto significaque el
efecto de la de flexion de flecha es tender a sacar el extremo pequeno de los dientesdel endentamiento, hacienda que el extrema mayor lleve la mayor parte de la cargaoPor ende, la carga a traves del diente es variable y, par esta raz6n, es convenientedisenar un diente un tanto corto. Como se muestra en la tabla 8-3, la anchurade la cara se limita por 10 comitn a aproximadamente un tercio de la distanciadel cono. Se observa tambien que una anchura de cara corta simplifica losproblemas del trabajo a maquina al cortar los dientes de un engrane conieo.En la figura 8-14 se definen otros terminos caracteristicos de los engranesc6nicos. Observese que se mantiene una holgura constante haciendo que los elemen
tosdel cono de la cara sean paralelos a los elementos del cono de la raiz delengrane endentado. Esto explica por que el vertice del cono de la cara no coincidencon el del co no de paso en la figura 8-14. Esto permite un chaflan mas grande en elextrema pequeno del diente, que el que de 10 contrario, se obtendria.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 300/508
ENGRANES HELICOIDALES. DE GUSANO Y CONICOS 319Addendum- Distancia de montajeFigura 8·148-10 CORONA DENTADA Y ENGRANES DE CARASi el angulo de paso de un par de engranes c6nicos se hace igual a 90°, el cono de
paso se convierte en una superficie plana y el engrane resultante recibe el nombrede corona dentada. En la figura 8·15 se presenta una corona dentada acopladacon un pifi6n c6nico. N6tese que una corona dentada es el equivalente a unacremallera en el engranaje recto. EI cono posterior de una corona dentada es uncilindro y el diente de involuta resultante tiene lados rectos, como se indica en lafigura 8-13.Se puede obtener un juego de engranes pseudoc6nicos utilizando un engranede cara endentado con un engrane recto. EI angulo entre los ejes es de 90°. Para
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 301/508
320 mORiA DE MAQUINAS Y MECANISMOSFigura 8-15 Corona dentada y pifi6n c6nico.asegurar la mejor accion de los dientes, el pinon recto debe ser un duplicado delcortador lhnador utilizado para cortar el engrane de cara, con excepcion, porsupuesto, de la holgura adicional en las puntas de los dientes del cortador. La
anchurade cara de los dientes en el engrane de cara se debe mantener mas bien corta;de 10 contrario, el borde superior se hara puntiagudo en e1 diametro mayor.8-11 ENGRANES CONICOS ESPIRALESLos engranes corncos rectos son faciles de disefiar y sencillos para fabricarse,y danmuy buenos resultados en operacion si se montan exact a y positivamente. Sin embargo,como en el caso de los engranes rectos, se hacen ruidosos en los valores maselevados de la velocidad de la linea de paso. En estos casos, a menudo resulta unabuena practica de disefio recurrir al engrane conico espiral, que es el equivale
nteconi co del engrane helicoidal. En la figura 8-16 se muestra un par endentado de engranes conic os espirales, y en ella se puede ver que las superficies de pasoy lanaturaleza del contacto son igua1es que para los engranes conicos rectos, exceptopor las diferencias introducidas por los dientes de forma espiral.Los dientes de los engranes conicos espirales se conjugan con una cremallerade corona basica, que se genera como se indica en la figura 8-17, utilizando uncortador circular. El angulo de espiral 1/1 se mide en el radio medio del engrane. AIigual que en los engranes helicoidales, los conicos espirales dan una accion de
dientemucho mas suave que los engranes conicos rectos y, por consiguiente, son utilesen las situaciones en que se encuentran velocidades elevadas. Para obtener una verdaderaaccion de diente espiral, la razon de contacto en la cara debe ser de por 10menos 1.25.Los [mgulos de presion usados con los engranes conicos espirales son por 10c omiln 141 a 20°, mientras que el angul0 de espiral es de aproximadamente 300

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 302/508
ENGRANES HELICOIDALES, DE GUSANO Y CONICOS 321Figura 8-16 Engrane s conieos espirales. (Gleason Works. Rochester, N. Y.)Figura 8-17 Corte de dientes de un engrane espiral sobre la eremallera de coronabasica.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 303/508
322 mORtA DE MAQUINAS Y MECANISMOS35°. Por 10 que concierne a la acci6n del diente. la mana de la espiral puede serderecha 0 izquierda, y esto no provoca diferencia alguna. Sin embargo, si loscojinetes estan flojos, los dientes podrian atascarse 0 separarse. dependiendo de ladirecci6n de la rotaci6n y la mana de la espiral. Puesto que el atascamiento de
losdientes causaria el mayor dafio, la mano de la espiral debe ser tal que los dientestiendan a separarse.Engranes conicos Zerol El engrane c6nico Zerol es un engrane patentado quetiene dientes curvos; pero con un angulo espiral de cero grados. Por 10 que respectaa la aeci6n de los dientes, no tiene ventaja alguna sobre el engrane c6nico rectoy se ha disefiado sencillamente para aproveehar la maquinaria cortadora que se usapara producir engranes c6nicos espirales.
8-12 ENGRANES HlPOIDALESComo en el caso de las aplicaciones en los diferenciales de autom6viles, con frecuenciaconviene tener un engrane similar a los c6nieos, pero con los ejes descentrados0 excentricos. Este tipo de engranes se conocen como hipoidales debido aque sus superficies de paso son hiperboloides de revoluci6n. La acci6n de los dientesentre este tipo de engranes es una combinaci6n de rodadura y deslizamiento a10 largo de una recta, y tiene mucho en comlin con la de los engranes del gusano.En la figura 8-18 se ilustra un par de engranes hipoidales.Figura 8-18 Engranes hipoidales. (Gleason Works, Rochester, N. Y.)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 304/508
ENG RANES HELICOIDALES, DE GUSANO Y CONICOS 323PROBLEMAS8-1 Un par de engranes helicoidales paralelos tiene un lingula de presion normalde I·W ,6 de pasodiametral y un angulo de helice de 45°. EI pifl.on tiene 15 dientes y el engrane 24. Calcl1lese el paso circular
transversal y normal, el paso diametral normal, los diarnetros de paso y los numeros equivalentesde dientes.8·2 Un par de engranes helicoidales paralelos se cortan con un angulo de presi6n normal de 20° y un angulode heHce de 30°. Tienen un paso diametral de 16 y, respectivamente, 16 y 40 dientes. Se debe encontrarel lingula de presi6n transversal, el paso circular normal, el paso axial y losradios de paso delos engranes rectos equivalentes.8-3 Un juego de engranes helicoidales paralelos se fabrica can un lingulo de presion transversal de 20° y
un angulo de MUce de 35°. Los engranes tienen un paso diametral de 10 y 15 Y 25 dientes, respectivamente.Si la anchura de la cara es de .. pulg, calcitlese el lingula de helice de basey la raron de contactoaxial.8-4 Se va a cortar un par de engranes helicoidales para eies paralelos cuya distancia entre los centrosdebe ser de aproximadamente 3.. pulg, para obtener una raz6n de velocidades de 1.80, aproximadarnente.Los engranes se deben cortar can una fresa maestra con un lingula de presion estandar de 20°cuyo paso diametral es de 8. Con un angulo de Mlice de 30° , deterrninense los valores transversales del
paso diametral y del circular, asi como los niu:neros de dientes, los diarnetrosde paso y la distancia en·tre los centros.8-5 Un pift6n helicoidal de 16 dientes va a girar a 1 800 rpm e irnpulsara a unengrane helicoidal sobreun eje paralelo a 400 rpm. Los centros de los ejes deben tener una separaci6n de11 pulg. Utilizando unangulo de helice de 23° y un angulo de presi6n de 20°, determinense valores para losniuneros de dientes,diarnetros de paso, paso circular y diametral normales, y la anchura de la cara. '
8-6 La descripci6n en un cataIogo de un par de engranes heUcoidales es la siguiente: angulo de presionnormal 14°, angulo de helice 45°, paso diarnetral de 8, anchura de cara, 1 pulg, paso diametral normal,11.31. El pifl.6n tiene 12 dientes y un diarnetro de paso de 1.500 pulg, y el engrane cuenta con 32dientes, un diarnetro de paso de 4.000 pulg. Los dos engranes tienen dientes dealtura completa y sepueden comprar ya sea de mano derecha a izquierda. Si se acopla un pil!.on derecho can un engraneizquierdo, encuentrese la razon de contacto transversal, la razon de contacto normal, la razon de con·tacto axial y la raz6n de contacto total.
8-7 En la transrnisi6n de un carni6n de tamalio mediano se dene un engrane del vastago del embraguede 22 dientes, que se endenta continuamente con un engrane de contrarnarcha de 4
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 305/508
1 dientes. Los datosson: paso diarnetral normal, 7.6, lingulo de presion normal, 18..o; angulo de helice, 23..o; y anchurade la cara 1.12 pulg. EI engrane del vastago del embrague se corta con una Mliceizquierda y elengrane de contrarnarcha can una helice derecha. Deterrninense l a raz6n de contacto normal y la total si
los dientes se cortan de altura completa con respecto al paso diametral normal.8-8 Un piil.6n helicoidal es derecho. tiene 12 mentes, un angulo de helice de 60°y debe impulsar a otroengrane con una raz6n de velocidades de 3. Los ejes forman un lingula de 90° y elpaso diametral normalde los engranes es 8. Encuentrese el angulo de helice y el numero de dientes delengrane acoplado.i,CuaI es la distancia entre los centros?8-9 Un piMn helicoidal derecho debe irnpulsar a un engrane, con un angulo entreejes de 90°. EI pil!.6ntiene 6 dientes y un lInguio de helice de 75°, y debe impulsar el engrane con unaraz6n de velocidades de
6.5. EI paso diarnetral normal de los engranes es 12. Calcitlese el angulo de helice y el numero de dientesdel engrane acoplado; determinese el diarnetro de paso de cada engrane.8-10 EI engrane 2 de la figura (piig. 324) debe girar en el mismo senddo del movirniento de las manecillasdel reloj e impulsar al engrane 3 en el sentido contrario, con una raron de velocidades de 2.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 306/508
324 TEORlA DE MAQUINAS Y MECANISMOSOsese un paso diametral de 5, una distancia entre los centros de aproximadamente10 puig y el mismoan.lulo de belice en ambos engranes. Encuentrense los numeros de dientes, los angulos de beliee y ladista..exacta entre los centros.
8-11 Un gusano que tiene 4 dientes y un avance de 1 pulg impulsa a un engrane eon una raz6n de velocidadesde 7... Determlnense los dilunetros de paso del gusano y del engrane para una distaneia entrelos centros de H pulg.8·11 Especifiquese un gusano apropiado para una eombinaci6n engrane-gusano, para una raz6n develocidades de 60 y distancia entre los centros de 6! pulg. Osese un paso axialde 0.500 puig.ProbiemaS-l08-13 Un gusano de 3 dientes impulsa a un engrane que tiene 40 dientes. EI paso axial es Ii pulg y el
diametro de paso del gusano es H pulg. CalcUlese el avance y ellmgulo de avancedel gusano. Encuentreseel angulo de helice asl como el diametro de paso del engrane.8-14 Se va a fabricar un par de engranes c6nicos de dientes rectos para un angulo entre los ejes de 90°.Si el impulsor debe tener 18 dientes y la raz6n de velocidades es de 3, i,cuaIesson los angulos de paso?8-15 Un par de engranes c6nieos de dientes rectos tiene una raz6n de velocidadesde 1.5 y un angulo entrelos ejes de 75°. i,CuaIes son los angulos de paso?8-1Ci Se debe montar un par de engranes c6nicos rectos con un angulo entre ejesde 120°. El pifi6n y elengrane deben tener, respectivamente, 15 y 33 dientes, i,CuaIes son los angulos
de paso?8-17 Un par de engranes c6nicos rectos con paso diametral de 2 tienen 19 y 28 dientes, respectivamente.El lIngulo entre los ejes es de 90°. Determinense los diametros de paso, los angulos de paso, el addendum,el dedendum, la anchura de la cara y los diametros de paso de los engram:s rectos equivalentes.8-18 Un par de engranes c6nicos rectos de paso diametra18 tiene 17 y 28 dientes,respectivamente, y unfIngulo entre los ejes de 105°. Calculese para cada engrane el dianletro de paso,el lIngulo de paso, eladdendum, el dedendum, la anchura de la cara y el nfu:nero equivalente de diente
s. Hagase un diagramade los dos engranes endentados. Osese las proporciones estflndar de los dientescomo para un linguloentre los ejes de 90° .
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 307/508
CAPITULONUEVETRENES DE MECANISMOSTrenes de mecanismos son todos aquellos mecanismos que se disponen en diversascombinaciones en serie y en paralelo, de tal manera que el elemento impulsado de
uno de los mecanismos es el impulsor de otro. Con ciertas excepciones, que se vana estudiar a fondo, el analisis de estos trenes se puede realizar en forma de cadena,aplicando los metodos de analisis desarrollados en los capitulos previos.9-1 TRENFS DE ENGRANES DE EJES PARALELOSY DEFINICIONESEn el capitulo 3 se estudio que raz6n de velocidades angulares es un terminoutilizado para describir la cantidad que resulta cuando la velocidad angular deunelemento impulsado se divide entre la velocidad angular del elemento impulsor.Por consiguiente, en un eslabonamiento de cuatro barras, en el que el eslabon 2
esel elemento impulsor, 0 de entrada, y el eslabon 4 se considera como el elemento impulsado, 0 de salida, la razon de velocidades angulares es(a)En este capitulo se han suprimido los segundos subindices de la ecuaci6n (a) parasimplificar la notaci6n. Asimismo, en el caso del engranaje, es mas convenientetratar con la velocidad y, por tanto, se empleara el simbolo n para describir la velocidad en revoluciones por minuto (rpm) 0, en algunos casos, en revolucionespor segundo (rls 0 1 /s) . Por ende, es preferible escribir la (a) como(9-1)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 308/508
326 TEORIA DE MAQUINAS Y MECANISMOSen donde nL es la velocidad del ultimo engrane de un tren Y nF es la velocidad delprimer engrane del mismo tren. Com(mmente, el ultimo engrane es la salida y es elengrane impulsado, y el primero es el impulsor 0 de entrada.
EI termino e definido por la ecuaci6n (9-1) recibe a veces el nombre de raz6nde velocidades 0 bien, valor del tren. Ambos terminos son perfectamente adecuados.La ecuacion se escribe a menudo en la forma mas conveniente.(9-2)Considerese ahora un pinon 2 que impulsa a un engrane 3. La velocidad del engraneimpulsado es(b)en donde N es el nlimero de dientes, des el diametro de paso y n puede ser lasrevoluciones por minuto 0 el numero total de vueltas. En el caso de engranajes con
ejes paralelos, se puede tener presentes las direcciones especificando que la velocidad es positiva 0 negativa, dependiendo de si la direcci6n es en sentido contrarioal del movimiento de las manecillas del reloj 0 en el mismo sentido. Estemetodo no es aplicable cuando los ejes de los engranes no son paralelos entre si,como sucede, por ejemplo, en los engranajes c6nicos, helicoid ales cruzados 0 de gusano. Por estas razones, a menudo es mas sencillo tener presentes las direccionesutilizando un esquema del tren.El tren que se muestra en la figura 9-1 se compone de cinco engranes. Si se
aplica la (b) en forma de cadena, se encuentra que la velocidad del engrane 6 es (c)En este caso se observa que el engrane 5 es un engrane loco y que sus nlimeros dedientes se cancelan en la ecuaci6n (c) y, por ende, s610 tiene la funci6n de cambiarla direccion de rotaci6n del engrane 6. Tambh..n se observa que los engranes 2,4 y5 son impulsores, en tanto que los 3, 5 y 6 son elementos impulsados. Por ende,laecuaci6n (9-1) se puede escribir tambim
Figura 9-1
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 309/508
TRENES DE MECANISMOS 327producto de los numeros de dientes de los impulsorese=producto de los numeros de dientes de los impulsados(9-3)Notese en la (b) que tambien se pueden usar los dhlmetros de paso en la (9-3). P
araengranaje con ejes paralelos se usara la siguiente convenci6n de los sign os. Siel ultimoengrane gira en el mismo sentido que el primero, e es positivo; si el ultimo engranegira en senti do opuesto al primero, e es negativo.9-2 F..JEMPLOS DE TRENES DE ENGRANESAI hablar de trenes de engranes, con frecuencia resulta conveniente describir un tren de engranes simple como el que solo tiene un engrane en cada eje. Entoncesun tren de engranes compuesto es el que, como el de la figura 9-1, tiene dos 0 mas
engranes en uno 0 mas ejes.En la figura 9-2 se muestra una transmisi6n para camiones de tamafio pequefioy medio; cuenta con cuatro velocidades hacia adeiante y una hacia atras.El tren que aparece en la figura 9-3 se compone de engranes conicos, helicoidalesy rectos. Los engranes helicoidales son cruzados y, por tanto, la direccionde rotacion depende de la mano de los engranes helicoid ales .Un tren de engranes invertido (Fig. 9-4) es aquel en el que el primero y Ultimoengranes estan sobre el mismo eje. Esta configuracion da lugar a la compacticidady se usa en aplicaciones tales como reductores de velocidad, relojes (para co nectarla manecilla de las horas con la de los minutos), y herramientas para maquina.
Engrane delvllstago delembragueJuego deengranes decontramarcha17043024074308
65 I-------{----170Engrane loco de reversaiVelocidad Transmisi6n1 2-3-6-92 2-3-5·83 2·3·4·74 Direcu.Reversa 2·3·6·10·11·9Figura 9-2 Transmisi6n de cami6n. Los engranes son rectos con un paso diametralde 7 y un Angulo depresi6n de 22.5°.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 310/508
328 TEORtA DE MAQUINAS Y MECANISMOSFigura 9-3 Tren que consta de engranesc6nicos, helicoidales cruzadosy rectos.Como ejercicio, se sugiere que 'el lector determine un conjunto aoecuado de pasos
diametrales para cada par de engranes ilustrados en la figura, de tal suerte queelprimero y ultimo engranes tengan el mismo eje de rotaci6n.9-3 DETERMINACION DEL NUMERO DE DIENTESSi se esta trasmitiendo una gran cantidad de potencia a traves de una unidad dereducci6n de velocidad, el paso del Ultimo par de engranes acoplados senft mayor que el del primer par, porque el momento de torsi6n es mayor en el extremo desalida. En espacio dado se pueden usar mas dientes en engranes de paso mas reducido;de donde, se puede obtener una mayor reducci6n de velocidad en el extremode alta velocidad.
Sin adentrarse en el problema de la resistencia de los dientes, sup6ngase que se desea utilizar un par de engranes en un tren con el fin de obtener un valor deltrende 1112. lmpongamos tambien la restricci6n de que el nllinero de dientes nodebe ser menor que 15 y que la reducci6n obtenida en el primer par de engranesdebe ser aproximadamente el doble de la que se obtiene en el segundo par. Estosignifica queUltimo engrane (impulsado)4203Primer engrane limpulsor)F1gura 9-4 Tren de engranes invertido.
(a)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 311/508
TRENES DE MECANISMOS 329en donde NJN3 es el valor de tren del primer par y NJNs es el del segundo.Dado que el valor de tren del primer par debe ser la mitad del corresponci.ientealsegundo,o bien,
N4 N4 12Ns Ns 12Z; = ..l = 0.4082(b)(c)con cuatro cifras decimales. Se observa que los siguientes numeros de dientes estancercanos al valor deseado:.ui39 44aDe estos, la mejor aproximaci6n es ..; pero n6tese queN2 N4 2020 200 e = N3 Ns = 98 49 = 2401no es TI' Por otro lado, la combinaci6n de 1i para la primera reducci6n y
.. para la segunda da un valor de exactamente TI. De dondee = (1i)(..) = TIEn este caso, la reducci6n en el primer par no es exactamente el doble que la delsegundo; pero esta consideraci6n en general tiene poca importancia.EI problema de especificar los nUmeros de dientes y el nu.mero de pares de engranespara dar un valor del tren dentro de cualquier grado de especificado deexactitud ha despertado el interes de much as personas. Considerese, por ejempl0,el problema de especificar un juego de engranes que tengan un valor del tren de17'/10, con una exactitud de ocho cifras decimales.9-4 TRENES DE ENGRANFS EPlcICLICOS
En la figura 9-5 se muestra el tren de engranes epiciclico elemental junto con ladesignaci6n simplificada de los mismos, utilizada por Uvai. t EI tren se componedeun engrane central 2 y un engrane epicfclico 4, que produce un movimiento epiciclicorodando en torno a la periferia del engrane central. Cuenta tambien con unbrazo de manivela 3 que contiene los cojinentes para el engrane epiciclico con el finde mantener endentadas a las dos ruedas de engrane.Estos trenes se conocen tambien como planetarios. Segu.n esta nomenclatura, elengrane 2 de la figura 9-5 es el engrane sol, el 4 es el engrane planetaria y la
manivela 3 se denomina soporte planetaria. En la figura 9-6 se presenta el trendet Las publicaciones dedicadas al tema de los trenes de engranes epiciclicos son,a decir verdad, escasas.Se encontrara un estudio compieto en ingles, en la obra de Z. L. Levai Theory ofEpicyclic Gearsand Epicyclic Change-Speed Gears, Technical University of Building, Civil and Transport Engineering,Budapest, 1966. Este libro enumera 104 referencias.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 312/508
330 TEORtA DE MAQUINAS Y MECANISMOS432(a) (b)Figura 9-5 a) Engrane epiciclico elemental;
b) designaci6n simplificada.la figura 9-5 al que se Ie han agregado dos engranes planetarios redundantes. Estoproduce un mejor equilibrio de fuerzas porque, al agregar mas engranes planetarios,se aumenta el nitmero de fuerzas; pero los planetarios adicionales en nadacontribuyen al comportamiento cinematico. Por esta razon, en general, en las ilustracionesy los problemas de este libro, itnicamente se muestra un solo planetario,aun cuando una maquina real es probable que se construya con los planetarios entrios.En la figura 9-7 se muestra un tren de engranes epiciclico simple, junto con la
designacion simplificada correspondiente, en el que se puede ver la manera enla que se puede transmitir el movimiento del planetaria hacia otro engrane central.El segundo engrane central en este caso es el 5, un engrane interno. En la figura 9-8se presenta una disposici6n similar, can la diferencia de que los dos engranescentrales son externos. N6tese, en esta misma figura, que los planetarios doblesestanmontados en un solo eje planetario, y que cada uno de ellos se endenta con unengrane sol.En cualquier caso, sea cual fuere el nitmero de planetarios utilizados, s610 sepuede emplear un soporte 0 brazo. Este principio se ilustra en la figura 9-6, enla
que se usan planetarios redundantes, y en la figura 9-9, en donde se usan dosplanetarios para alterar el comportamiento cinematico.Segllil Levai, hay 12 variaciones posibles; todas ellas se muestran en formasimplificada en la figura 9-10, como las dispuso Levai. Las de las figuras 9-10a y eEngranesplanetariosEngraneSapone planetario(brazo)Figura 9-6 Juego de engranes planetarios.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 313/508
TRENES DE MECANISMOS 331son los trenes simples en los que los planetarios se endentan con los dos engranessol. Los trenes que se yen en las figuras 9-10 b y d tienen pares planetarios que estanparcialmente endentados entre si, y en parte con los engranes sol.
Ns = 80054(b)(a)Figura 9-7 a) Tren de engranes epiciclico simple; b) designacion simplificada.l 4340(a) (b)Figura 9-8 Tren de engranes epiciclico simple con pianetarios dobles.9-5 TRENES EPICicLiCOS DE ENGRANES CONICOSEl tren de engranes conicos ilustrado en la figura 9-11 se conoce can el nombre
deengrane de reducci6n de Humpage. Los trenes epiciclicos de engranes conkos seemplean can bastante frecuencia; pero son iguales que los trenes epiciclicos deengranesrectos. De hecho, el tren de la figura 9-11 es un tren epiciclico doble y enla figura 9-10 se puede hallar el equivalente de engranes rectos de cada uno. Enla
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 314/508
332 TEORiA DE MAQUINAS Y MECANISMOS4..,...JJ2(alFigura ,., Tren epiciclico con dos planetarios.
1fl B5AGH(c)ffmF3 tcL11 530
(hI4 -52 3(d)(bl753EJ3Figura 9·10 Los 12 tipos posibles de engranes epiciclicos segim Levai.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 315/508
TRENES DE MECANISMOS 333Fignra 9-11siguiente secci6n se encontrara que el anaIisis de este tipo de trenes es el mismo quepara los trenes de engranes rectos.9·5 SOLUCION DE TRENFS PLANETARIOS MEDIANTE FORMULA
En la figura 9-12 se presenta un tren de engranes planetario que consta de un engranesol 2, un brazo 3, y los engranes planetarios 4 y S. Al aplicar la ecuaci6n(3-10), se puede escribir que la velocidad del engrane 2 en relaci6n con el brazo esn23 n2 n3Asimismo, la velocidad del engrane 5 en relaci6n con el brazo esAI dividir la (b) entre la (a) quedanS3 ns n3n23 n2- n3(a)(b)
(c)La ecuaci6n (c) expresa la raz6n de la velocidad relativa del engrane S a la delengrane2, y ambas velocidades se toman en relaci6n con el brazo. Esta raz6n es lamisma y proporcional a los mimeros de dientes, ya sea que el brazo este girando0no. Es el valor del tren; de donde, se puede escribir(d)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 316/508
(334 TEOR1A DE MAQUINAS V. MECANISMOSLa ecuaci6n (d) Resulta conveniente expresarla en la formaen donde nFvelocidad nLvelocidad nA
velocidad del primer engrane del tren, rpmvelocidad del ultimo engrane del tren, rpm= velocidad del brazo, rpmLos siguientes ejemplos ilustraran el uso de la (9-4).(9-4)Ejemplo 9-1. En la figura 9-8 se presenta un tren planetario invertido. E1 engrane 2 esta sujeto asu eje y es impulsado a 250 rpm en el mismo sentido del movimiento de las manecillas del reloj.Los engranes 4 y 5 son planetarios que estan unidos, pero tienen la Iibertad degirar, sobre el ejellevado por el brazo. EI engrane 6 es estacionario. Encuentrese la velocidad y l
a direcci6n derotaci6n del brazo.SOLUCION Primero se debe decidir que engrane se va a designar como el primero yel Ultimoelementos del tren. Puesto que se dan las velocidades de los engranes 2 y 6, cualquiera de ellospuede utilizarse como el primero. La elecci6n no establece diferencia alguna enlos resultados;pero una vez tomada dicha decisi6n, no se puede cambiar. Asi pues, se escogera el engrane 2como el primero; de donde, el 6 sera el ultimo. Por consigui,ente,Al sustituir estos valores en la ecuaci6n (9-4) danA 114rpm cmr
Ejemplo 9-2. En el tren de engranes c6nicos ilustrado en Ja figura 9-11, Ja entrada es hacia el engrane2, y la salida desde el engrane 6, que se conecta al eje de salida. EI brazo 3 gira Iibreinentesobre el eje de salida y lleva a los planetarios 4 y 5. El engrane 7 esta fijo al marco. i,Cual es lavelocidad de salida si el engrane 2 gira a 2 000 rpm?SOLUCION EI problema se resuelve en dos pasos. En el primero se considera que eltren secompone de los engranes 2, 4 Y 7, y se calcula la velocidad del brazo. Par siguiente,Figura 9-12

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 317/508
/ TRENES DE MECANISMOS 335Haciendo las sustituciones en la (9-4), y despejando la velocidad del braw, da5 O-nA-19 = 2 000 -nA nA = 416.7 rpmConsiderese ahora que el tren consta de los siguientes engranes 2, 4, 5 Y 6. Por
10 tanto setiene que nF = n2 = 2000 rpm, al igual que antes, y nL = n6. que es 10 que se debe encontrar. EIvalor del tren ese=HM..)=-..Haciendo las sustituciones en la (9-4) una vez mas y resolviendo para nL> puestoque ahora seconoce nA da12 nL -416.7-49=
2 000-416.7nL = n6 = 28.91 rpmEI eje de salida gira en la misma direcci6n que el engrane 2, con una reducci6nde 2 000:28.91,0sea, 69.2: 1.9-7 ANALISIS TABULAR DE TRENES PLANETARIOSEn la figura 9-7 se ilustra un tren de engranes planetario que consta de un engranesol 2, un soporte (brazo) del planetario 3, un engrane planetario 4 y un engraneinterno5 que va endentado con el planetario. Se podrian dar razonablemente ciertosval ores para las revoluciones por minuto del engrane sol y el brazo, y desear determinar
las revoluciones por minuto del engrane interno.El amilisis se lleva a cabo en los tres pasos siguientes:1. Fijense todos los engranes al brazo y hagase que este de una vuelta. TabUlenselas vueltas resultantes del brazo y de cada engrane.2. Fijese el brazo y ha.gase girar uno 0 mas de los engranes sol. Tabulense lasvueltasresultantes del brazo y de cada engrane.3. Sumense las vueltas de cada engrane en los pasos 1 y 2, de modo que se satisfaganlas condiciones dadas.Tabla 9-1 Solucion por tabulacion, rpm
Numero del paso Brazo 3 Engrane 2 Engrane 4 Engrane 51. Engranes fijos +200 +200 +200 +2002. Brazo fijo 0 -100 +200 + 503. Resultados +200 + 100 +400 +250Como un ejemplo de este tipo de soluci6n, asignense los numeros de dientesque se dan en la figura 9-7, y sup6ngase tambien que la velocidad del engrane sol y

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 318/508
336 TEORIA DE MAQUINAS Y MECANISMOSdel brazo son 100 y 200 rpm, respectivamente, ambas en direcci6n positiva. En la tabla 9-1 se consigna la soluci6n. En el paso 1, los engranes se fijan al brazoy aeste se Ie dan 200 vueltas en sentido contrario at movimiento de las manecillas
delreloj. Esto produce tambien 200 vueltas en sentido opuesto at movimiento de lasmanecillas del reloj para los engranes 2, 4 y S. En el paso 2 se fija el brazo.Ahora,determinense las vueltas que debe dar el engrane 2 para que cuando se sumen a lasdel paso 1 el resultado sea, en este caso, + 100 rpm. Esto es -100 vueltas, comoseindica. Para completar el paso 2, usese el engrane 2 como impulsor y determinese el numero de vueltas de los engranes 4 y S. De donde,n4= (-lOO)(-® +200rpm
y n5 = (-IQO)(-®(iS) = +50 rpm/Estos valores se anotan en las ooltimnas apropiadas y se suman los pasos 1 y 2 paraobtener el resultado.Los siguientes ejemplos desarrollados ayudaran a comprender mejor estemetodo...emplo 9-3.Encuentrese la velocidad del engrane exterior de la figura 9-7 si, por el contrario,el engrane 2 gira a 100 rpm en el mismo sentido del movimiento de las manecillasdel reloj, yelbrazo 3 gira a 200 rpm en el sentido contrario.SoLUCION Los resultados estan tabulados a continuaci6n. En el paso I, los engran
es se fijan albrazo y se hace girar a este 200 vueltas en sentido opuesto al movimiento de lasmanecillas delreloj. Esto hace que los engranes 2, 4 y S realicen tambien 200 vueltas en ese sentido.En el paso 2 se fija el brazo; de modo que se anota 0 para las vueltas del brazoen la primeracolumna. En la segunda columna, el engrane 2 debe girar de tal modo que cuando sus vueltas sesumen a las del paso 1, el resultado sea 100 vueltas en el mismo sentido del movimiento de lasmanecillas del reloj. Por esta raz6n, se especifican -300 vueltas para el engran
e 2. Ahora, si setrata al engrane 2 como impulsor, las vueltas de los engranes 4 y 5 son:Numero del paso Brazo 3 Engrane 2 Engrane 4 Engrane 51. Engranes fijos +2002. Brazo fijo3. Resultados+200-300-100+200+600+800+200
+150+350n4 (-300)(-..= +600 rpm

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 319/508
ns = (- 300)(-..(iS) = + 150 rpmDespues de sumar las coiumnas. se ve que el resultado esns = 350 rpm cmrEjemplo 9-4 El tren de engranes planetario que aparece en la figura 9-13 se conoce con elnombre de paradoja de Ferguson. EI engrane 2 es estacionario en mud de estar fijo a un marco,
el brazo 3 y los engranes 4 y 5 pueden girar libremente sobr.. el eje. Los engranes 2, 4 y 5 tienen,respectivamente, 100, 101 y 99 dientes, cortados todos enos en discos en blancodel mismo diii.metro,de tal modo que el planetario 6 se endenta con todos elIos. Hii.llense las vueltas de los en-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 320/508
TRENES DE MECANISMOS 3371010 1000 Figura 1)·13 Paradoja de Ferguson.granes 4 Y 5 si al brazo se Ie da una vuelta en sentido contrario al movbnientode las manecillasdel reloj.SOLUCION Los resultados se dan en la tabla que sigue
Numero del paso Brazo 3 Engrane2 Engrane 4 Engrane51. Engranes fijos +1 +1 +1 +12. Braw fijo .. -1 -IOOlIOI -100/993. Resultados +1 0 + 1/10 1 -1199Para que el engrane 2 quede fijo, se Ie debe dar una vuelta en el mismo sentidodel movimiento delas manecillas del reloj en el paso 2. Los resultados muestran que conformese hace girar el brazo,el engrane 4 gira muy lentamente en la misma direcci6n, en tanto que el 5 gira muy lentamente enla direcci6n opuesta.lijemplo 1).5 La unidad de sobremarcha que se ilustra en la figura 9-14 se usa d
etras de una transmisi6nesUmdar para reducir la velocidad del motor. Determinese el porcentaje de reducci6n quese obtendra cuando se "mete" Ia sobremarchaEngrane interior conectadoal eje motriz, 420Soporte plane1ario conec1ado a Is transmisi6n Figur1l9·14 Unidad de sobremarcha.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 321/508
338 TEORiA DE MAQUINAS Y MECANISMOSSOLUCION Es conveniente utilizar una vuelta para eJ brazo. Esto proporciona losresultadosque se muestran en la tabla que sigue. La velocidad del motor corresponde a la del brazo, y la deleje motriz a la del engrane 5. Por 10 tanto,
Reducci6n en la velocidad del motor =1'..:2; 1 (100) = 30%2 Engrane4 Engrane 51. Engranes fijos +1 +1 +1 +12. Brazo fijo .....Q -1 + 1.5 +0.4293. Resultados +1 0 +2.5 + 1.4299-8 DIFERENCIALESLa clase de trenes de engranes planetarios conocida como diferenciales se utilizacon tanta profusi6n que merece una atenci6n especial. La operaci6n de un diferencialse ilustra por medio del dibujo esquematico del diferencial de autom6vil que
aparece en la figura 9-15. EI pinon del eje motriz y el engrane anular normalmenteson engranes hipoidales. EI anular actua como el soporte planetario y se puede Calcularsu velocidad como para un tren de engranes simple, cuando se conoce lavelocidad del eje motriz. Los engranes 5 y 6 se conectan, respectivamente, a cadarueda posterior y, cuando el autom6vil se esta moviendo en linea recta, ambos giranAla ruedar-----lposterior IL.-___ Ir"-''''-"-'' ......... ----., A la ruedarn'777:nr---.J posterior
Figura 9·15 Dibujo esquematico deun diferencial automotriz de engranesc6nicos.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 322/508
TRENES DE MECANISMOS 339en la misma direcci6n exactamente con la misma velocidad. Por ende, para elmovimiento rectilineo del automovil, no hay movimiento relativo entre los engranesplanetarios y los engranes 5 y 6. De hecho, los engranes planetarios sirvensolo como cuiias para transmitir el movimiento del soporte planetario a ambas
ruedas.Cuando el vehiculo efectua una vuelta, la rueda que queda dentro de la mismarealiza menos revoluciones que la que describe el radio mas largo al girar. A menosque de alguna manera se de margen para esta diferencia de velocidades, una de laslIantas, 0 las dos, tendrian que resbalar para poder efectuar la vuelta. EI diferencialpermite que cada rueda gire a velocidades diferentes mientras que, al mismotiempo, entrega potencia a ambas. Durante una vueIta, los engranes planetariosgiran en torno a sus propios ejes, permitiendo con ello que los engranes 5 y 6 10
hagan a velocidades diferentes.El proposito de un diferencial es establecer una diferencia entre las velocidadesde las dos ruedas. En el diferencial usual de los automoviles, el momento detorsion se divide en forma igual ya sea que el auto se desplace en linea recta 0describauna curva. En ocasiones, las condiciones de la carretera son tales que el efecto de traccion desarrollado por las dos ruedas es desigual. En este caso, el esfuerzototal de traccion disponibk sera de solo el doble del que se tiene en la rueda con lamenor traccion, porque el diferencial divide el momento de torsion en forma igua
l.Si sucede que una de las ruedas se apoya sQbre nieve 0 hielo, el esfuerzo totaldisponiblees muy pequeno y solo se requerira un momento de torsion reducido parahacer que la rueda gire.PROBLEMAS9-1 Calculese la velocidad y la direcci6n de rotaci6n del engrane 8 de la figura. ..CuaI.es la raz6n develocidades del tren?48 D Problema 9-19-2 La parte (a) de la figura da los diametros de paso ge un juego de engranes rectos que forman un
tren. Calculese la raz6n de velocidades del tren. Determinese la velocidad y direcei6n de rotaci6n de losengranes 5 y 7.9-3 En la parte (b) de la figura se muestra un tren que consta de engranes conicos, rectos y un gusanojunto con su engrane. El pinon conico esta montado sobre un eje que se i mpulsamediante una bandaen V sobre poleas. Si la polea 2 gira a I 200 rpm en la direcci6n que se muestra, encuentrese la velocidady direccion de rotaci6n del engrane 9.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 323/508
340 TEORIA DE MAQUINAS Y MECANISMOS(a)Problema 9·2 y 9·3480 7..--..-'--..-rl..Gusano
derecho 3D ·R.H.(b)59·4 Dsese la transmisi6n de cami6n de Ia figura 9·2 y una velocidad de entrada de 3000 rpm. Encuentresela velocidad del eje motriz para cada engrane de avance y para el engrane de reversa.9-5 En la figura se Hustran los engranes contenidos en una caja de engranes de cambio de velocidadesque se utilizan en aplicaciones de maquinas-herramienta. En este caso se puedenobtener nueve cam biosde velocidad deslizando el grupo de engranes sobre los ejes B y C. EI problema d
el disefiador de la34A n-,.:- _.U5"-'--6--B-.... 9
- ..§.. r--- t c-'--'--Problema 9·5n=450r"11....,r--1'-7
-'---10- {Jn=137 apmEntradaSalida580 rpm

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 324/508
TRENES DE MECANISMOS 341Problemas 9-6 y 9-7(a) (b)P:roblemas 9-8 a 9-11maquina-herramienta eonsiste en seleecionar los numeros de dientes para los diversos engranes, con el
fin de produeir una distribuci6n razonable de velocidades para eI eje de salida.Los engranes mas pequenoy mas grande son, respectivamente, el 2 y el 9. Suponiendo que estos engranes tienen 20 y 45dientes, respeetivamente, determinese un conjunto de mlmeros de dientes apropiados para los engranesrestantes. l,Cuaies son las veIoeidades correspondientes del eje de salida? N6tese que el problema tienemuchas soluciones.9-6 EI engrane interior (el mlmero 7) de la figura gira a 60 rpm emr. I,Cuales son la velocidad y direcci6nde rotaci6n del brazo 3?
9-7 Si el brazo de la figura gira emr a 300 rpm, deterrninese la velocidad y direeei6n de rotaci6n del engraneinterior 7.9·8 En la parte (a) de la figura, el eje C es estacionario. Si el engrane 2 gira a800 rpm mmr, leual es lavelocidad y cual la direcci6n de rotaci6n del eje B?
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 325/508
342 TEORIA DE MAQUINAS Y MECANISMOS9·9 En la parte (0) de la figura, eonsiderese que el eje B es estacionario. Si eleje C se impulsa a 380 rpmemr, l,cuales son la velocidad y direeci6n de rotaci6n del eje A?9-10 En la parte (a) de l a figura, determinese la velocidad y direeci6n de rotaci6n del eje C a) los ejes A
y B giran a 360 rpm emr y b) el eje A gira a 360 rpm mmr y el eje B 10 haee a 360 rpm emr.9-11 En la parte (0) de la figura, el engrane 2 esta eonectado al eje de entrada. Si el brazo 3 esta eoneetadoal eje de salida, i,que reducei6n de velocidad se puede obtener? ..Cual es el sentido de la rotaci6ndel eje de salida? l.Que cambios se podrian haeer en el tren para producir el sentido de rotaci6n opuesto?9-12 El tren de Levai tipo L que se muestra en la figura 9-10 tiene Nz 16D, N. 19D, Ns = 170N6 = 240, N7 95 O. El engrane interne 7 esta fijo. Calculese la velocidad y direeci6n de rotaci6n del
brazo si el engrane 2 se,impulsa a 100 rpm mmr.9·13 El tren de Levai tipo A que apareee en la figura 9·10 tiene Nz 200 y N. 32 Da) Encuentrese el numero de dientes en el engrane 5 y el radio del brazo de manivela, s1 el m6dulo es6mm.b) i,Cual es la velocidad y direcci6n de rotaei6n del brazo si el engrane 2 est!fijo y el engrane interno5 gira a 10 rpm emr?9·14 Los numeros de dientes para el diferencial automotriz ilustrado en la figura9-15 son Nz = 17,N3 = 54, N. 11, y Ns = N6 = 16. EI eje motriz gira a 1 200 rpm, l.cual es la velocidad de la ruedaderecha sl se encuentra elevada, montada sobre un gato, y la rueda izquierda des
cansa sobre la superfidede la carretera?9-15 Un vehiculo que usa el diferencial ilustrado en la figura 9-15, gira haciala derecha a una ve10cidadde 30 millas por hora, describiendo una eurva con un radio de 80 pies. Usense los mismos numeros dedientes que se citaron en el problema 9-14. EI diametro de la llanta es de 15 pulg. Sup6ngase que la distanciade centro a centro entre las rodaduras es de 60 pulg.a) Calculese la velocidad de cada rueda posterior.b) l.CuM es la velocidad del engrane anular?
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 326/508
CAPITULODIEZSÍNTESIS DE ESLABONAMIENTOSEl término síntesis cinemática se refiere al diseño o creación de un mecanismo paraobtener un conjunto deseado de características de movimiento. En vista de la amplísima
variedad de técnicas disponibles, algunas de las cuales suelen ser en extremoabrumadoras, aquí se presentan algunos de los procedimientos más útilespara ilustrar la aplicación de la teoría. t:l:10-1 SíNTESIS DEL TIPO, DEL NúMERO y DIMENSIONALLa sintesis del tipo se refiere a la clase de mecanismo seleccionado; podria seruneslabonamiento, un sistema de engranes, bandas y poleas o un sistema de levas.Esta fase inicial del problema total de diseño comprende por lo común factores dediseño tales como los procesos de manufactura, materiales, seguridad, confiabitSe pueden encontrar extensas referencias en K. Hain (traducida por T.P. Goodmany otros), AppliedKinematics, la. ed., pp. 639-727, McGraw-HiIl, 1%7, y en Ferdinand Freudenstein
y George N.Sandor, Kínematics of Mechanisms, en Harold A. Rothbart (ed.). Mechanical Design and Systems Handbook.pp. 4-56 a 4-68, McGraw-Hill, New York, 1964.:j: En lengua inglesa, las siguientes son las referencias más útiles sobre sintesiscinemática: Rudolf A.Beyer (traducida por Herbert Kuenzel), Kinematics Synthesis of Mechanisms, McGraw-Hill, New York,1963; Alexander Cowie, Kinematics and Design of Mechanisms, lnternational Textbook, Scranton,Pa., 1961; Hain, op. cit.; AlJen S. Hall, Jr., K inematics and Linkage Design, Prentice-Hall, EnglewoodCliffs, N. J., 1961; R. S. Hartenberg y Jacques Denavit, K inematícs Synthesis of
Linkages,McGraw-HiIl, New York, 1964; Jeremy Hirschhorn, Kinematics and Dynamics of PlaneMechanisms,McGraw-Hill, New York, 1962; D. C. Tao, Fundamentals of Applied K inematics, Addison-Wesley,Reading, Mass., 1967; A. H. Soni, Mechanism Synthesis and Ana/ysis, McGraw-HiII.1974.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 327/508
344 TEORtA DE MÁQUINAS Y MECANISMOSlidad, espacio y economía. El estudio de la cinemática en general se ocupa sóloligeramentente de la síntesis del tipo.La sfntesis del número se ocupa del número de eslabones y de articulaciones opares que se requieren para obtener una movilidad determinada (véase la sección1-6). La síntesis del número e,s el segundo paso en el disefio, después de la síntesis d
eltipo. ...El tercer paso en el ¡jisefio, la determinación de las dimensiones de los eslabonesindividuales se conoce con el nombre de sintesis dimensional. Este es el temadel que se ocupa el resto de este capítulo.10-2 GENERACiÓN DE LA FUNCIÓN, GENERACIÓNDE LA TRAYECTORIA Y GUiA DEL CUERPOUna clasificación importante de los problemas de síntesis que surge en el disefio de los eslabonamientos es la llamada generación de la función. Una de las necesidadesfrecuentes en el disefio es la de hacer que un elemento de salida gire, oscile,o tenga
un movimiento alternativo, según una función del tiempo, o bien, una función delmovimiento de entrada especificada. Esto se conoce con el nombre de generaciónde la función. Un ejemplo sencillo es el de sintetizar un eslabonamiento de cuatro barras para generar la función y = f (x). En este caso, x representaría el movimientode la manivela de entrada y el eslabonamiento se disefiaría de tal modoque el movimiento del oscilador de salida sea una aproximación de la función y.Otros ejemplos de generación de la función son:l. En la línea de un transportador. el elemento de salida de un mecanismo se debemover a la velocidad constante del transportador, al mismo tiempo que realizacierta operación, por ejemplo, poner un tapón, regresar, recoger el siguientetapón y repetir la operación.
2. El elemento de salida debe hacer una pausa o detenerse durante su ciclo demovimiento a fin de dar tiempo para que suceda otro evento. El segundo eventopodría ser una operación de sellado, engrapado o sujeción de algún tipo.3. El elemento de salida debe girar a una función de velocidad no uniforme especificada,porque está acoplada a otro mecanismo que requiere ese movimientode rotación.Un segundo tipo de problema de síntesis es aquél en el que un punto delacoplador debe generar una trayectoria que tenga una forma prescrita. Las necesidadescomunes son que una porción de la trayectoria sea un arco circular, elípticoo una recta. En ocasiones se necesita que la trayectoria cruce sobre sí misma,
como en una figura de ocho.La tercera clase general de problemas de síntesis se denomina guía del cuerpo;en este caso, el interés reside en mover un objeto de una posición a otra. El problemapuede ser una traslación simple o una combinación de traslación y rotación.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 328/508
SÍNT ESIS D E ESLABONAMIENTOS 345Por ejemplo, en la industria de la construcción, piezas pesadas como cucharones ycuchillas de bulldozer se deben mover siguiendo una serie de posiciones prescritas.Dos clases de defectos. llamados de rama y de orden, pueden presentarse en lasíntesis para confundir al disefiador. El defecto de rama se refiere a un eslabona
mientodesarrollado que satisface todas las necesidades de posición pero tienepuntos del acoplador en ambas ramas de la curva del acoplador. El defecto de ordense r efiere a un eslabonamiento desarrollado que satisface todas las necesidades de posición, pero no en el orden correcto. t10-3 POSICIONES DE PRECISIÓN:ESPACIAMIENTO DE CHEBYCHEVSi 92 es la posición angular del eslabón 2 en un eslabonamiento de cuatro barras,y 94 es la posición angular del eslabón 4, entonces uno de los problemas de la síntesis
cinemática es encontrar las dimensiones del eslabonamiento de tal manera que(a)en donde f es cualquier relación funcional deseada.Aunque este problema no se ha resuelto, es posible especificar hasta cincovalores para 92, llamados puntos de precisión, y encontrar en ocasiones un eslabonamientoque satisfaga la r elación deseada para la función y luego seleccionarde dos a cinco puntos de precisión a partir de la gráfka para utilizarlos en la síntesis.Si el proceso tiene éxito, la relación funcional se satisface para estos puntos;pero ocurrirán desviaciones en otros. Para muchas funciones, el error más grandese puede mantener a un nivel inferior al 4010.Entre los puntos se presentarán desviaci ones, conocidas con el nombre de
errores estructurales. U no de los problemas del disefio de eslabonamiento consisteen seleccionar un conjunto de puntos de precisión para utilizarlos en la síntesis, detal modo que se minimice el error estructural.Como primer tanteo, el mejor espaciamiento de estos puntos es el llamado espaciamientode Chebychev. Para n puntos en el intervalo Xo s x S Xn+1 el espaciamientoChebychev, según Freudensteín y. Sandor, * es _ 1 1 '1T(2j 1)Xi - 2 (Xo + Xn+l) 2 (Xn+l - Xo) c os 2nen donde Xi son los puntos de precisión.
j = 1 , 2, .. . , n (10-1)tVéase la obra de K. J. Waldron y E. N. Stevensen, Jr., Elimination 01 Branch, GrashoJ, andOrder Dejects in Path-Angle Generation and Functlon Generation Synthesis, ASME Paper No. 78..D ET -16:1: Op. cit. p. 4-27.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 329/508
346 TEORíA DE MÁQUINAS Y MECANISMOS{al {blFigura 10-1 Determinación gráfica del espaciamiento de Chebychev.Como ejemplo, supóngase que se desea idear un eslabonamiento para generarla función(h)
para el intervalo 1:s; x :s; 3, usando tres puntos de precisión. Entonces, partiendode la ecuación (10-l), los tres valores de x son1 1 ..(2 1) n,x1=Z(1+3)-Z(3-1)cos(2)(3)2-cos"6= 1.1343..X2 = 2 -cos 2.0005n XJ = 2 -cos 2.866Los valores correspondientes de y se encuentran basándose en la (b ) y son
YI = 1.106 Y2 = 1.741 Y3 = 2.32 2Se obtienen con facilidad estos puntos exactos utilizando el procedimiento de la figura 10-1. El método se muestra en la figura lO-la, en donde se construye primeroun círculo cuyo diámetro es el intervalo áx dado por la ecuaciónáx = Xn+I-XO (e)En este círculo inscríbase un polígono regular de 2n lados. Las perpendicularesbajadas de cada vértice intersecarán a áx en los puntos de precisión. En la figuralO-lb se ilustra la construcción para el ejemplo numérico.Al concluir esta sección, conviene destacar que el espaciamiento de Chebycheves la mejor primera aproximación; dependiendo de las necesidades de exactitud del

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 330/508
StNTE SI S DE E SLABONAMIENTOS 347problema. Si se requiere una actitud adicional, entonces mediante una curva delerror estructural en contra de x, por lo común se pueden determinar visualmentelos ajustes que se deben hacer en los puntos de precisión para el tanteo siguiente.10-4 SíNTESIS DE POSICIÓN DEL MECANISMO GENERAL
DE CORREDERA Y MANIVEI..AEl mecanismo centrado de corredera y manivela ilustrado en la figura 10-20, tieneuna carrera BIB2 igual al doble del radio de la manivela, r2. Como se muestra, seencuentran las posiciones extremas Bl y B2, llamadas también posiciones límite, dela corredera, trazando arcos de círculo con centro en O2 y cuyo radio sea, respectivamenter3 r2 Y r3 + r2.En general, el mecanismo centrado de corredera y manivela debe tener a r3más grande que rz. Sin embargo, el caso especial de r3 = r2 da por resultado unmecanismo isósceles de corredera y manivela en el que la corredera tiene un movimi
entoalternativo pasando por O2 y la carrera es 4 veces el radio de la manivela.Todos los puntos del acoplador del mecanismo isósceles de corredera y manivelageneran trayectorias elípticas. Las trayectorias generadas por puntos sobre elacoplador del mecanismo de corredera y manivela de la figura 10-20 son no elípticas;pero siempre son simétricas en torno al eje de deslizamiento OzB.El eslabonamiento de la figura 1O-2b se denomina mecanismo generala excéntricode corredera y manivela. Se pueden obtener ciertos efectos especiales, cambiando la distancia de excentricidad e. Por ejemplo, la carrera BIB2 siempre esmayor que el doble del radio de la manivela. Asimismo, el ángulo de la manivelarequerido para ejecutar la carrera hacia adelante es diferente del que correspon
de ala carrera de retroceso. Se puede aplicar esta característica para sintetizar losmecanismos de retorno rápido, en los que se desea una carrera de trabajo más lenta.En la figura 1O-2b, nótese que se encuentran las posiciones limite Bl y B2 de lacorredera, de la misma manera que para el de corredera y manivela centrados.(alFigura 10-2 a) Mecanismo centrado de corredera y manivela; b) mecanismo general,o excéntrico, decorredera y manivela.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 331/508
348 TEOR1A DE MÁQUINAS Y MECANISMOSFigura 10-3 Posiciones extremas del mecanismo de manivela y oscilador.10-5 SíNTESIS DE MECANISMOS DE MANIVELA Y OSCILADORLas posiciones límite del oscilador, en un mecanismo de manivela y oscilador, estánidentificadas como los puntos B1 y B2 en la figura 10-3. Nótese que estas posiciones
se encuentran de la misma manera que para el eslabonamiento de correderay manivela. Obsérvese también que la manivela y el acoplador quedan en una solarecta en cada posición extrema.En este caso particular, la manivela describe el ángulo 1/1 mientras que el osciladorse mueve de B 1 a B2 describiendo el ángulo f/J. Se observará que, en lacarrera de retorno, el oscilador va de B2 de regreso a Bh recorriendo el mismo ángulof/J;pero que la manivela recorre el ángulo 360° -1/1.Hay muchos casos en los que un mecanismo de mamvela y oscilador es superiora un sistema de leva y seguidor. Entre las ventajas que se tienen sobre esteúltimo sistema están las fuerzas menores que intervienen, la eliminación del resorte
de retención y las holguras menores en virtud del uso de pares de revoluta.Si ¡f¡ > 1800 en la figura 10-3, entonces a = ¡f¡ - 180, en donde se puede obtenera p..tiendo de Ila ecuación correspondiente a la razón de tiempos (véase lasección 1-12)Q = 180+a180-a(10-2)de los movimientos de avance y retorno del oscilador. El primer problema que sepresenta en la síntesis de los eslabonamientos de manivela y oscilador es cómo obtenerlas dimensiones o la geometría que hagan que el mecanismo genere un ángulode salida especificado 4>, cuando también se especifica la razón de tiempos. tt El método que se va a describir aparece en la obra de Hall, op. cit., p. 33, Y S
om, op. cit., p.257. Tanto Tao. op. cit. p. 241, como Hain, op. cit., p. 317, describen otro método que da resultadosdiferentes.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 332/508
SÍNTESIS DE ESLABONAMIENTOS 349(b)Figura 10-4 Síntesis de un eslabonamiento de cuatro barras para generar el ángulo del oscilador.Para sintetizar un mecanismo de manivela y oscilador, para los valores específicos
de cb y a, localicese el punto 04 en la figura 1O-4a y elíjase cualquier longituddeseada del oscilador, '4. Luego trácense las dos posiciones 04B¡ y 04B2del eslabón 4, separadas por el ángulo cb como se dé. Trácese cualquier recta X quepase por B¡. Entonces, trácese la recta Y que pase por B2, formando el ángulodado a con X. La intersección de estas dos rectas define la ubicación del pivote dela manivela, O2, Puesto que originalmente se eligió cualquier recta X, existe unnúmero infinito de soluciones para este problema.A continuación, como se observa en las figuras 10-3 y 10-4a, la distancia B2Ces 2r2, el doble de la longitud de la manivela. Por tanto, biséquese esta distanciapara encontrar '2. Entonces la longitud del acoplador eS'3 OzB¡ - '2. En la figura
10-4b se ilustra el eslabonamiento completado.10-6 MECANISMOS DE MANIVELA-OSCILADORCON ÁNGULO ÓPTIMO DE TRANSMISIÓNBrodell y Soni t han desarrollado un método analitico para sintetizar el eslabonamientode manivela y oscilador en el que la razón de tiempos seaQ 1. El disefiosatisface también la condición'Y min 1800 - l' máxen donde l' es el ángulo de transmisión (véase la sección 1-10).(a)t R. Joe Brodell yA. H. Soni. "Design of the Crank-Rocker Mechanism with Unít TimeRatio", J.Mech., vol. 5 No. 1, p. 1, 1970.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 333/508
350 TEORÍA DE MÁQUINAS Y MECANISMOSBFigura 10-5Con el fin de desarrollar el método, úsese la figura 10-3 y la ley de los cosenos,para escribir las dos ecuacionesLuego, según la figura 10-5,
rT + d - (r2 + r3)22rlr4rT + d - (r3 - r2)22rlr4(b)(e)(d)(e)Las ecuaciones (a) a (e) ahora se resuelven en forma simultánea; los resultados sonlas razones entre los eslabones(10-3)
(10-4)(l0-5)Brodell y Soni representan gráficamente estos resultados como una gráfica dediseño, como se ilustra en la figura 10-6. Estos investigadores afirman que el ángulode transmisión debe ser mayor que 30° para lograr un movimiento de buena"calidad", e incluso mayor, cuando se manejan velocidades elevadas.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 334/508
1.00.90.80.70.60:5
lOQl 0.4 oc: ..c.!l! lO Ql 0.3 .!2'"5l! 0.2 ..Qlc: 0.1 2.. a::SÍNTESIS DE ESLABONAMIENTOS 351....i:.. -..- I'¡Oo.,..., r-,..l "qt )400 , "- ji IX· 1/ / 30°1 I (---- r4/r1 "" f- .../ \ If- ' .r3/r1 /\/ /r:.. y" 30° V \ f---- r2/r1 / / L': / V/. /fi V// V /' / ,.-i--........ - /V / 1/1 1#V / -"' //vhV.. '.iV V/ lr..tE§:! I60°
1500/'r---.50° \400-....30°'\.40°8....... -
Figura 10-6 Gráfica de Brodell-Sonipara diseñar el eslabonamiento demanivela y oscilador, con un ángulode transmisión óptimo y razón deÁngulo del oscilador de salida lb100° 1200 tiempos unitaria. Los ángulos que sedan en las gráficas son 'Y min La síntesis de un mecanismo de manivela y oscilador para el ángulo de transmisiónóptimo, cuando la razón de tiempos no es la unidad, es más dificil. Hallt, ytambién Sonit , explican un método ordenado para lograr esto. En la figura 10-7 seilustra el primer paso de este procedimiento. En este caso se seleccionan los dos
t op. cit., pp. 36-42.:j: Op. cit., p. 258.Figura 10·7 Diagrama que muestra todas lasubicaciones posibles de BI y B,?
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 335/508
)352 TEORíA DE MÁQUINAS Y MECANISMOSFigura 10-8 Determinación de laslongitudes de los eslabones para unode los mecanismos de manivela yoscilador posibles.
puntos O2 y 04, Y se encuentran los puntos e y C', simétricos respecto a 0204 ydefinidos por los ángulos (4)/2) ex y 4>/2. Luego, utilizando a e como centro y aladistancia que va de e a O2 como radio, trácese el arco circular que es el lugargeométrico de B2 En seguida, utilizando a C' como centro y con el mismo radio,trácese otro arco circular que sea el lugar geométrico de BI'En la figura 10-8 se ha sintetizado uno de los muchos eslabonamientos posiblesde manivela y oscilador. Para obtener las dimensiones, elijase cualquierpunto BI sobre el lugar geométrico de Bit y trácese un arco alrededor de 04, con elfin de localizar a B2 sobre el lugar geométrico de B2 Una vez que se definen estosdos puntos, se aplican los métodos de la sección anterior para localizar los puntosAl y Az, junto con las longitudes de los eslabones, rz y r3.
Siempre se deben verificar los eslabonamientos resultantes para asegurarse deque el eslabón 2 es capaz de describir un círculo completo.Para obtener un eslabonamiento con un ángulo de transmisión óptimo, elijaseuna variedad de puntos B, sobre el lugar geométrico de Bl, sintetizando un eslabonamientopara cada uno. Determínense los ángulos 190'" 'Ymínl Y 190'" - 'Ymáxlpara cada uno de estos eslabonamientos. Luego sitúense estos datos en una gráfica,utilizando el ángulo f3 (Fig. 10-8) como la abscisa para obtener dos curvas.Entonces se define el mecanismo que tiene el mejor ángulo de transmisión medianteel punto bajo sobre una de las curvas.10-7 SíNTESIS DE TRES POSICIONESEn la figura 1O-9a, el movimiento del oscilador de entrada 02A, describiendoel ángulo 1/112, provoca un movimiento del oscilador de salida 04B, que describe e
l
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 336/508
SíNTESIS DE ESLABONAMIENTOS 353Figura 10-9 a) La r otación del osciladorde entrada O,¡A describiendoel ángulo ,p12 hace que el oscilador desalida 04B oscile describiendo el ángulo<P12. b) Eslabonamiento invertido
respecto a la posición 04B.ángulo <P12' Para definir la inversión como una técnica de síntesis, mantengamosestacionario a 04B y dejemos que el resto de los eslabones, incluyendo al marco, ocupen las mismas posiciones relativas como en la figura 1O-9a. El resultado(Fig. 1O-9b) se denomina inversión en el oscilador de salida. Nótese que A¡B¡ seFigura lO-lO
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 337/508
354 TEORíA DE MÁQUINAS Y MECANISMOScoloca en la misma posición que en las figuras 1O-9a y b. Por consiguiente, la inversiónse hace en la posición 04BI . Puesto que 04B1 debe estar fijo, el marcotendrá que moverse para que el eslabonamiento adquiera la posición A2B2 Dehecho, el marco tendrá que moverse hacia atrás, describiendo el ángulo <P12. Por
ende, la segunda posición es OíAíBí04'En la figura 10-10 se ilustra un problema y el eslabonamiento sintetizado en elque se desea determinar las dimensiones de un eslabonamiento en el que la palancade salida debe ocupar tres posiciones especificadas, correspondientes a tres posicionesdadas de la palanca de entrada. En la figura 10-10, el ángulo de partida dela palanca de entrada es 82; y 1/112, 1/123 y 1/113 son los ángulos de oscilación, respectivamente,entre las posiciones de diseño 1 y 2, 2 Y 3, y 1 Y 3. Para la palanca desalida se desean los ángulos de oscilación correspondientes <P12, 4>23 y <PJ3o Es preciso
determinar la longitud del eslabón 4 y su posición de partida 84,La solución para el problema se ilustra en la figura 10- 1 1 y se basa en la inversióndel eslabonamiento en el eslabón 4. Trácese el oscilador de entrada OzA ensus tres posiciones especificadas y localícese una posición deseada para 04 Puestoque se hará la inversión en el eslabón 4, en la primera posición de diseño, tráceseun rayo de 04 a A2 y gírelo hacia atrás describiendo el ángulo <P12 para localizara Aí o Del mismo modo, trácese otro rayo OxAx y hágase girar hacia atrás describiendoel ángulo 4>13 con el fin de localizar Ajo Puesto que se está invirtiendo sobre laprimera posición de diseño, Al y Aí son coincidentes. Ahora trácense las mediatricesde las rectas AíA2 y AíA... Estas se intersecan en BI y definen la longituddel acoplador 3 así como la longitud y la posición de partida del eslabón 4.Figura 10-11
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 338/508
SlNTESIS DE ESLABONAMIENTOS 35510-8 REDUCCIÓN DE LA POSICIÓN DEL PUNTO;CUATRO PUNTOS DE PRECISIÓNEn la reducción de la posición del punto, el eslabonamiento se hace simétrico respecto a la recta central del marco, 0204, de forma que se logre que dos de los puntos
A' sean coincidentes. El efecto de esto es producir tres puntos equivalentes A'por los que se pueda trazar un círculo como en la sintesis de tres posiciones. Estemétodo se ilustra mejor con un ejemplo.A continuación se sintetizará un eslabonamiento para poder generar la funcióny log x para lOs x s 60, utilizando un intervalo de la manivela de entradade 1200 y uno de salida de 900 Con el propósito de simplificar la presentación, no se empleará el espaciamientode Chebychev. Se evalúa el ángulo", para las cuatro posiciones de disefio apartir de la ecuación", == ax + b Y de las condiciones en la frontera'" == O cuandox = 10 Y '" 1200 cuando x == 60. Esto da '" == 2.40x 24. El ángulo 4> se
(a)(d)Figura 10-12
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 339/508
356 TEORíA DE MÁQUINAS Y MECANISMOSTabla 10-ltPosición x "', grados y 4>, grados1 10 O 2.30 O2 20 24 3.00 353 45 94 3.80 75
4 60 120 4.10 90t "'12 = 24" 1/112 = 35""'23 70" 1/123 40""'34 26° 1/Ij4 = 15°evalúa exactamente en la misma forma; de donde, se obtiene f/l = SOy-lIS. En latabla 10-1 se dan los resultados de este trabajo preliminar.En la figura IQ..12 se presenta una selección de cuatro configuraciones para laposición de partida. En a, la recta 0204 biseca tanto a 1/112 como a f/l12; y, portanto,si el elemento de salida que hace girar en sentido opuesto al movimiento de lasmanecillas del reloj, desde la posición 04B2, Aí y Aí serán coincidentes y se encontraránen Al. Entonces la inversión se basaría en la posición de 04B¡. De donde
A3 se giraría describiendo el ángulo f/l\3' en torno a 04, en sentido contrario almovimiento de las manecillas del reloj hasta llegar a A;; y A4 describiría el ángulo f/l14 hasta llegar a A4.En .la figura lO-12b, la recta 0204 biseca a 1/123 y f/l23, en tanto que en d se bisecan los ángulos 1/114 y f/l14' Al obtener las inversiones para cada caso, debe tenerse un cuidado extremo para asegurarse de que se hace la rotación en la direccióncorrecta y con los ángulos correctos.Cuando se usa la reducción de la posición del punto, lo único que es factibleespecificar por adelantado es la longitud del oscilador de entrada 02A. La dista
ncia0204 depende de los valores de 1/1 y f/l. como se indica en la figura 10-12.Nótese que cada posición de síntesis ofrece un valor diferente para esta distancia.En realidad esto resulta muy conveniente ya que no es raro sintetizar un eslabonamientoque no pueda funcionar. Cuando esto sucede, se puede intentar una delas otras configuraciones.El eslabonamiento sintetizado aparece en la figura 10-13. El procedimiento esexactamente el mismo que para los tres puntos de precisión, excepto en lo que yase hizo notar previamente. El punto Bl se obtiene en la intersección de las mediatricesde AjA.. y A;A4. En este ejemplo el mayor error cometido es menor que
el 30/0.10-9 MÉTODO DE LA FIGURA SOBREPUESTALa síntesis de un generador de función, póngase por caso, utilizando el método dela figura sobrepuesta, es el método más fácil y rápido de utilizar de entre todos.No siempre es posible obtener una solución y, en ocasiones, la exactitud es defi-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 340/508
SíNTESIS DE ESLABONAMIENTOS 357Figura 10-13dente. Sin embargo, desde un punto de vista teórico, se pueden emplear tantospuntos como se deseen en el proceso.Diseñemos un generador de función para resolver la ecuación(a)
Supóngase que se eligen seis posiciones del eslabonamiento para este ejemplo y que se usa un espaciamiento uniforme del oscilador de salida. En la tabla 10-2 se muestranlos valores de x y y redondeados, así como los ángulos correspondientes seleccionadospara los osciladores de entrada y salida.Tabla 10-2Posición x if¡, grados y q" grados1 1 O 1 O2 1.366 22.0 1.284 14.23 1.756 45.4 1.568 28.4
4 2. 1 6 69.5 1.852 42.65 2.58 94.8 2.136 56.86 3.02 1 21.0 2.420 71.0
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 341/508
358 T EORIA D E MÁQUINAS Y MECANISMOS(a)6Figura 10-14El primer paso de la síntesis es el que' se ilustra en la figura 10-140. Úsese unahoja de papel para dibujo y trácese el oscilador de entrada 02A en todas sus
posiciones. Esto exige que se elija la longitud de ..A Asimismo, en la mismahoja, elíjase una longitud para el acoplador AB y dibújense los arcos numeradosdell al 6, utilizando respectivamente como centros desde Al hasta AQ Ahora, en otra hoja de papel, trácese el oscilador de salida, cuya longitud sedesconoce, en todas sus posiciones, como se ilustra en la figura 1O-14b. Con centroen 04 dibújese cierto número de arcos igualmente espaciados que se intersequencon las rectas 041, 042, etc.; estos representan las longitudes posibles deloscilador de salida.El paso final consiste en colocar esta última figura sobre el dibujo del primerpapel y moverla en un intento por encontrar un ajuste. En este caso, se encontró el
ajuste y el resultado es el que se ilustra en la figura 10-15.10-10 SÍNTESIS DE LA CURVA DEL ACOPLADORtEn esta sección se usa el métE>do de reducción de la posición del punto para sintetizarun eslabonamiento de cuatro barras, de tal modo que un punto trazador delacoplador recorra cualquier trayectoria previamente especificada cuando se mueve el eslabonamiento. Luego, en las secciones que siguen, se descubrirá que las tratLos métodos aqui presentados fueron ideados por Rain y se presentan en su obra, op. cit., cap. 17.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 342/508
SlNTESIS DE ESLABONAMIENTOS 3596 ..y\32
Figura 10-15yectorias que tienen ciertas características son particularmente útiles al sintetizareslabonamientos que tienen detenciones del elemento de salida para ciertos periodosde la rotación del elemento de entrada.Al sintetizar un eslabonamiento con el fin de generar una trayectoria, sepueden elegir hasta seis puntos de precisión sobre la misma. Si la síntesis tieneéxito, el punto trazador pasará por cada uno de los puntos de precisión. El resultadofinal puede o no ser una aproximación de la trayectoria deseada.En la figura 10-16 se ilustran dos posiciones de un eslabonamiento de cuatrobarras. El eslabón 2 es el elemento de entrada; está conectado en A al acoplador 3,
Bl.----------.--------... Figura 10-16

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 343/508
360 TEORIA DE MÁQUINAS Y MECANISMOSque contiene el punto trazador e, y al eslabón de salida 4 en B. Se ilustran dosfases del eslabonamiento mediante los subíndices 1 y 3. Los puntos el y e3 sondos posiciones del trazador sobre la trayectoria que se va a generar. En este ejempIo/tly e3 se han seleccionado en forma especial de tal modo que la mediatriz
C)3 pase por 04 En lo que concierne a la selección de los puntos, se observará queel ángulo el04e3 es igual al ángulo A104A3, como se indica en la figura.La ventaja de hacer que estos dos ángulos sean iguales es que, cuando se sintetiza finalmente el eslabonamiento, los triángulos e3A304 y elAI04 son congruentes.Por tanto, si se hace que el punto trazador pase por el, sobre la trayectoria,también pasará entonces por e3 Para sintetizar un eslabonamiento de tal manera que el acoplador pase porcuatro puntos de precisión, se localizan cuatro puntos cualesquiera eh e2, e3, e4de la trayectoria deseada (Fig. 10-17). Por ejemplo, eligiendo el y e3, primerose localiza 04 en cualquier punto sobre la mediatriz Cn. Luego, con 04 como centro
y cualquier radio R, trácese un arco circular. A continuación, con los centrosen el y e3 y cualquier otro radio r, márquense pequefios arcos que se intersequencon el arco de radio R. Estas dos intersecciones definen los puntos Al y A3 deleslabón de entrada. Constrúyase la mediatriz an de AIA3 y obsérvese que pasapor 04 Localícese O2 en cualquier punto sobre an. Esto ofrece una oportunidadde elegir una longitud conveniente para el oscilador de entrada. Úsese ahora O2como centro y trácese el círculo de la manivela pasando por Al y A3. Los puntosA2 y A4 de este círculo se obtienen marcando pequefios arcos de radio r una vezmás con centro en e2 y e4 Esto completa la primera fase de la síntesis; se hanlocalizado O2 y 04 en relación con la trayectoria deseada y, por ende, se ha definidola distancia 0204 También se ha definido la longitud del elemento de entraday se localizaron sus posiciones relativas a los cuatro puntos de precisión de la
trayectoria...-------- .. ,- R--------------..Figura 10-17

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 344/508
SINTESIS DE ESLABONAMIENTOS 361RadioFigura 10-18La siguiente tarea consiste en localizar el punto B, el punto de sujeción delacoplador y el elemento de salida. Se puede utilizar cualquiera de las cuatroubicaciones de B; en este ejemplo se emplea la posición Bl>
Antes de dar principio al paso final, obsérvese que el eslabonamiento ha/ °4 Figura 10·19
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 345/508
362 TEORtA DE MÁQUINAS Y MECANISMOSquedado definido. Se tomaron cuatro decisiones; la ubicación de 04, los radios R y r y la ubicación de 02 . En consecuencia, hay una infinidad de soluciones posibles.En relación con la figura 10-18, 10ca1ícese el punto 2 haciendo congruentes a
los triángulos C2A2 04 y C¡A¡2. Localícese el punto 4 haciendo que sean congruentesC4A404 y C¡A¡4. Los puntos 4, 2 Y 04 están sobre el circulo cuyo centro es Bl.De donde, BI se encuentra en la intersección de las mediatrices de 042 y 044.Nótese que el procedimiento utilizado hace que los puntos 1 y 3 coincidan con 04,Una vez localizado Bh se pueden dibujar los eslabones en su sitio y el mecanismo se prueba para ver si describe bien la trayectoria prescrita.Para sintetizar un eslabonamiento con el fin de generar una trayectoria quepase por cinco puntos de precisión, es necesario hacer dos reducciones de punto.Se principia eligiendo cinco puntos de CI a Cs sobre la trayectoria que se deberecorrer. Elíjanse dos pares de estos puntos para los fines de reducción. En lafigura 10-19 se han elegido los pares CICS y C2 C3 Otros pares que pudieran
haberse usado son:(a)Figura sobrepapal delgadoCa _----_.. -..... "(b) FigurlllO-20

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 346/508
SíNTESIS DE ESLABONAMIENTOS 363Constrúyanse las mediatrices Cn Y CI5 de las rectas que conectan a cada par. Estas intersecan en el punto 04 Obsérvese que, en consecuencia, se puede localizar convenientemente04 mediante una selección juiciosa de los pares que se usarán, asi
como por la elección de las posiciones de los puntos CI sobre la trayectoria.El siguiente paso se realiza mejor empleando un trozo de papel delgado parasobreponerlo al dibujo. Fíjese esta hoja de papel delgado al dibujo y márquense elcentro 04, la mediatriz Cn, y otra recta que vaya de 04 a C2 sobre él. En la figura10-24a se ilustra esta superposición en donde la recta 04C2 se designa como 04C;. Esto define al ángulo tPn/2. A continuación, girese el papel delgado en torno a04 hasta que la mediatrÍz coincida con CI5 Y repítase el procedimiento para el punto CI. Con esto se define el ángulo tPls/2 y la recta correspondiente 04Cl.Ahora se fija el papel sobrepuesto en 04, utilizando una tachuela y se hacegirar hasta que se encuentre una buena posición. Es conveniente ajustar el compás
con un radio conveniente r y dibujar circulos en torno a cada punto C;. La intersecciónde estos circulo s con las rectas 04Cí y 04Cí de la hoja sobrepuesta, y entresi, revelará cuáles áreas valdrá la pena investigar. Véase la figura lO-20b.En la figura 10-21 se muestran los pasos finales de la solución. Después delocalizar una buena posición para el papel sobrepuesto, transfiéranse las tres rectasal dibujo y quítese el papel. A continuación dibújese un arco circular de radio rpara que se interseque con 04Cí y localícese Al. Otro arco del mismo radio r desdeC2 interseca con 04Cí en A2 Una vez localizados Al y A2 , dibújese la me-C2'Figura 10-21,3

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 347/508
364 TEORÍA DE MÁQUINAS Y MECANISMOSdiatriz a12; ésta se interseca con a23 en O2, dando la longitud del oscilador de entrada.Un círculo que pase por Ah en torno a O2, contendrá todas las posicionesde diseño de A; utilícese el mismo radio r, localícense A3, A4 Y A5 sobre arcostrazados alrededor de C3, C4 y C5
Ahora ya se localizó todo excepto el punto BI, y éste se encuentra como antes.Existe un doble punto 2,3 debido a la elección de 04 en la mediatriz e23. Paralocalizar este punto, trácese un arco desde Cl cuyo radio sea C204 Luego se trazaotro desde Al con radio A204 Estos se intersecan en el punto 2,3. Para localizarelpunto 4, márquese un arco desde Ch con radio C404, y otro desde Ah con radioA404 Nótese que los puntos 04 y los puntos dobles 1,5 coinciden, porque la síntesisse basa en la inversión sobre la posición 04BI. Los puntos 04,4 Y los puntosdobles 2,3, están sobre un círculo cuyo centro es Bt. como se muestra en la figura10-21. El eslabonamiento se completa dibujando el acoplador y el seguidor en laprimera posición de diseño.10-11 ESLABONAMIENTOS AFINES;
TEOREMA DE ROBERTS-CHEBYCHEVUna de las propiedades des usuales del eslabonamiento plano de cuatro barras esque no hay uno sino tres eslabonamientos de cuatro barras que generan la mismacurva del acoplador. Esto fue descubierto por Roberts t en 1875 y por Chebycheven 1878, de ahí que se conozca como teorema de Roberts-Chebychev. Aunque semencionó en una publicación en lengua inglesa en 1954, * no apareció en laspublicaciones estadounidenses sino hasta que fue presentado en forma independiente,y casi simultánea, por Richard S. Hartenberg y Jacques Denavit, de la NorthWestern University, y por Rolland T. Hinkle, de la Michigan State University.§En la figura 10-22, sea 0lAB02 el eslabonamiento original de cuatro barrascon un punto del acoplador P fijo a AB. Hartenberg y Denavit denominaroneslabonamientos afines a los dos eslabonamientos restantes definidos por el teor
emade Roberts-Chebychev. Cada uno de los eslabonamientos afines se ilustran enla figura 10-22, uno de ellos mediante guiones cortos y el otro mediante trazoslargos.La construcción es evidente, si se observa que hay cuatro triángulos semejantes,cada uno de los cuales contiene a los ángulos er, f3 y y, y tres paralelogramosdiferentes.Una buena manera de obtener las dimensiones de los dos eslabonamientosafines es imaginar que pueden soltarse las conexiones con el marco, OI. O2 y 03 t Por S. Roberts, un matemático; que no es el mismo Roberts a quien se debe el generador de líneasrectas aproximadas (Fig. 1-l2b).
t P. Grodzinski y E. M'Ewan, "Link Mechanisms in Modem Kinematics", Proc. Inst.Mech. Eng.,vol. 1 68. no. 37. p. 877-896, 1 954.§ R. S. Hartenberg y Jacques Denavit, "The Fecund Four-Bar", Trans. 5th Con! Mech., PurdueUniversity, Lafayette, Ind., 1958, p. 194. R. T. Hinkle, "Altemate Four-Bar Linkages", Prod. Eng.,vol. 29, p. 54, october, 1 958.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 348/508
SÍNTESIS DE ESLABONAMIENTOS 365F1gura 10-22Luego "se tira" de Oh O2 y 03, separándolos hasta que se forma una recta con lamanivela, el acoplador y el seguidor de cada eslabonamiento. Si se hace esto con la figura 10-22, se obtiene la figura 10-23. Nótese que las distancias sobre el ma
rcoson incorrectas; pero todos los eslabones movibles tienen la longitud correcta,ytodos los ángulos son los correctos. Dado cualquier eslabonamiento de cuatrobarras y su punto del acoplador, se puede crear un dibujo como el de la figura 10-23Figura 10-23 Diagrama de Cayley.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 349/508
366 TEORÍA DE MÁQUINAS Y MECANISMOSAFigura 10..24y obtener las dimensiones de los otros dos eslabonamientos afines. Este métodofue descubierto por A. Cayley y se denomina diagrama de Cay/ey. tLa ventaja del teorema de Roberts-Chebychev es que uno de los otros dos
eslabonamientos afines puede tener m ejores características de movimiento, o unmejor ángulo de transmisión, o bien, caber en un espacio menor.Si el punto trazador P se encuentra sobre la recta AB, o su extensión, unafigura como la 10-23 es de poca ayuda, debido a que los tres eslabonamientos secomprimen en una sola recta. En la figura 10-24 se presenta un ejemplo en el que 0)AB02 es el eslabonamiento original que tiene un punto del acoplador P, sobreuna extensión de AB. Para encontrar los eslabonamientos afines, localicese 03sobre una extensión de 0,0z en la misma razón que AB es a BP. Luego contrúyanseen orden, los paralelogramos O,A¡PA, 02B2PB Y 03C1PC2 Hartenberg y Denavit demuestran que las relaciones de velocidad angular entrelos eslabones de la figura 10-22 son
(10-6)t A. Cayley, "On Three-BarMotion". Proc. Lond. Math. Soc., vol. 7. PP_. )36-166,1876. En la época de cayley, un eslabonamiento de cuatro barras se describía como un mecanismo detres barrasporque aún no se había concebido la idea de cadena cinemática.Figura 10-25

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 350/508
SlNTESIS DE ESLABONAMIENTOS 367También observan que si se impulsa el eslabón 2 con una velocidad angular constantey si se deben conservar las relaciones de velocidad durante la generación de lacurva del acoplador, los mecanismos afines tendrán que ser impulsados con velocidadesangulares variables.
10-12 SíNTESIS ANALíTICA UTILIZANDO ÁLGEBRA COMPLEJAHay ocasiones en que se publica una investigación que resulta clásica por su simplicidade ingenio. El especialista ruso en cinemática Bloch t publicó una investigaciónde esta índole, que fue la chispa que encendió una generación completa deinvestigación. Su método se presenta aquí más por las ideas adicionales que puedegenerar, que por su valor intrínseco, y también en virtud de su interés histórico.En la figura 10-25 reemplácense los eslabones de un eslabonamiento de cuatrobarras por vectores de posición y escríbase la ecuación vectorialEn notación compleja polar, la ecuación (a) se escribeLa primera y segunda derivadas de estas ecuaciones son(a)
(b)(e)(d)Si ahora las ecuaciones (b), (e) y (el) se regresan a la notación vectorial, se obtienenlas ecuaciones simultáneasW+r2 2r2 + W3r3 + W4f"4 = O (a2 + jwDr2 + (a3 + jw..)r3 + (a4 + jw¡)r4 = O(e)Este es un conjunto de ecuaciones vectoriales homogéneas cuyos coeficientes sonnúmeros complejos. Bloch especificó los valores deseados de todas las velocidadesangulares y aceleraciones angulares, y luego resolvió las ecuaciones para obtenerlas dimensiones relativas del eslabonamiento.t s. Sch. Bloch. "On the Synthesis of Four-Bar Linkages" (en ruso), Bul/, Acad.
Sci. USSR., pp.47-54, 1940.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 351/508
368 TEOR1A DE MÁQUINAS Y MECANISMOSAl resolver las ecuaciones (e) para r2 da-1 1O W3 W4O W3 + j6).. W4 + j6)¡r2
1 1 (f)6)2 w3 W4U2 + jw.. u3 + jwi U4 + jwaSe obtendrán expresiones similares para r3 Y r4. Resulta que los denominadorespara las tres expresiones, es decir, para r2, r3 Y r4, son números complejos eiguales. En la división, se dividen las magnitudes y se restan los ángulos. Puestoque estos denominadores son todos semejantes, el efecto de la división sería cambiar las magnitudes de r2, r3 Y r4 en el mismo factor, y desplazar todas las direccionesen el mismo ángulo. Por esta razón, se hace que todos los denominadoressean la unidad; las soluciones dan en tal caso vectores adimensionales para los
eslabones. Cuando los determinantes se evalúan, se encuentrar2 = W4(U3 + jwj) W3(U4 + jw¡)r3 = W2(U4 + jw¡) W4(U2 + j6)Dr4 W3(U2 + jw..) - W2(U3 + jwD(10-7)Ejemplo 10-1 Sintetícese un eslabonamiento de cuatro barras que dé los siguientes valores para lasvelocidades y aceleraciones angulares:w-¿ 200 radl saz = Orad/s2WJ = 85 rad/saJ = -1000 rad/s2W4 130rad/s
a4 -16000 rad/s2SOLUCiÓN Después de sustituir los valores dados en las ecuaciones (10.7 f2 130[ -1000 + j (8!¡2)] 85[ -16000 + j{ 1 3W]1 230000 -j 497 000 = 1 330 000/-27: unidadesf3 = 200[- 1 6000+ j(130)21 = - 3 200 000 -j 1 8 20000 = 3 690 000/-150.4° unidadesf. = 8 5 [0+ j (200)2] 200[- 1 000+ j (8Wl200000+ ji 955 000 = 1 965000/8 4. 15° unidadesf¡ -(1 230000-j4970(0) -(200 000 + ji 9550(0)= 1 770000 +j 362 000 = 1 810OO O.. unidadesEn la figura 10. pulgada. Para hacer que f¡ sea horizontal y esté en la dirección -x se debe hacer girar todo el
sistema vectorial en sentido opuesto al movimiento de las manecillas del reloj 180.11.6 Entonces se puede construir el eslabonamiento resultante utilizando T¡ para el eslabón 1, fZ parael eslabón 2, etc., como se ilustra en la figura 10.26b. en pulgadas y, si se analiza, se encontrará que se han satisfecho las condiciones del ejemplo.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 352/508
SÍNTESIS DE ESLABONAMIENTOS 369yEscala: 1 000000 unidadesII...¡·-----------,r!I.------------------...----..---x
A(a)Figura 10-26 O;¡A = 1.33 pulg; AB 3.79 pulg; 04B 1.965 pulg; O;¡04 = 1.81 pulg.10-13 ECUACiÓN DE FREUDENSTEINtBSi la ecuación de la sección anterior se lleva a la forma compleja rectangular, y si se separan las componentes real e imaginaria, se obtienen las dos ecuaciones algebraicasr¡ cos 01 + r2 CoS O2 + r3 COS 03 + rol COS 04 = Or¡ sen 81 + r2 sen O2 + r3 sen (h + r4 sen 04 OPartiendo de la figura 10-25, sen 81 = O Y cos 01 = -1; de donde,
-r¡ + r2 cos flz + r3 COS 03 + rol cos fh = Or2 ..en O2 + r3 sen 83 + r4 sen 84 = O(a)(b)(e)(d)Para eliminar el ángulo del acoplador 03 de las ecuaciones, pásense todos los términos,excepto los que comprenden a r3, al segundo miembro y elévense alcuadrado ambos miembros. Esto dad cos2 83 = (rl - rz cos 62 - r4 cos (4)2dsen2 03 = (-rz sen 62 rol sen (4)2
(e)(j)t Ferdinand Freudenstein, "Approximate Synthesis of Four-Bar Linkages", Trans. ASME. vol. 77.no. 6, pp. 853-861, 1955.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 353/508
370 TEORíA DE MÁQUINAS Y MECANISMOSDesarróllense los segundos miembros de ambas ecuaciones y súmense. El resultadoes el siguiente: ti = ri + d + r¡ 2rlr2 COS 82 -2rlr4 COS 84+ 2r2r4( COS 82 COS 84 + sen 82 sen (4) (g)Ahora, obsérvese que cos 82 C06 94 + _sen 82 sen 94 == COS (82 (4). Si se hace esta
sustitución, divídase entre el término 2r2r4;-;' reordénense una vez más, se obtiem I(h)Freudenstein escribe la ecuación (h) en la forma(10-8)siendo ( l0-9)K2 = r2 (10-10)ti-ri-r..-d Kl = '--':"':-"- 2..r2r:"'=-4 "';";;:; ( l0-11)Ya se han presentado métodos gráficos para sintetizar un eslabonamiento detal modo que el movimiento del elemento de salida se coordine con el de entrada. La ecuación de Freudenstein nos permite realizar esta misma tarea por mediosanalíticos. En consecuencia, supóngase que se desea que la palanca de salida de un
eslabonamiento de cuatro barras ocupe las posiciones 4>1, 4>2 y 4>3 correspondientesa las posiciones angulares "'h 1/12, Y "'3 de la palanca de entrada. En la (10-8), loúnico que se hace es sustituir 92 por "', 84 por 4>, y se escribe la ecuación tresveces, una para cada posición. Esto daK¡ cos "'¡ + K2 cos <p¡ + K3 = COS ("'¡ - 4>¡)K¡ COS "'2 + K2 COS 4>2 + K3 = COS ("'2 - <P2)K¡ COS "'3 + K2 cos <P3 + K3 = COS ("'3 <P3 )(i)Las ecuaciones (l) se resuelven simultáneamente para las tres incógnitas K¡, K2, K3.Luego se selecciona una longitud, por ejemplo rI. para uno de los eslabones y se
resuelven las ecuaciones (10-9) a (10-1l) para determinar las dimensiones de los otros tres. El método queda mejor ilustrado por medio de un ejemplo.Ejemplo 10-2 Sinteticese un generador de función para resolver la ecuaciónutilizando tres puntos de precisión.1y x

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 354/508
SíNTESIS DE ESLABONAMIENTOS 371SOLUCIÓN Si se elige el espaciamiento de Chebychev, se encuentra, basándose en la (10-1), quelos valores de x y los valores correspondientes de y sonXI = 1 .067X2 = 1 .500
XJ = 1 .933YI = 0.937Y2 0.667Yl 0.5 17Ahora se deben elegir los ángulos de partida para las palancas de entrada y salida, asl como losángulos de oscilación total para cada una. Estas son decisiones arbitrarias y es posible que noconduzcan a un buen eslabonamiento, en el sentido de que los errores estructurales entre los puntosde precisión pueden ser grandes o que los ángulos de transmisión resulten deficientes.En ese
género de síntesis, hay ocasiones en que incluso se descubre que debe eliminarse unode los pivotespara pasar de un punto de precisión a otro. Por lo general se requiere cierto trabajo de tanteospara descubrir las mejores posiciones de partida y ángulos de oscilación más adecuados.Tabla 10-3x ¡fJ, grados y </>, grados1 .000 30.00 1 .000 240.001 .067 36.03 0.937 2 5 1.341.500 75.00 0.667 300.001 .933 1 13.97 0.51 7 326.942.000 1 20.00 0.500 330.00
Para la palanca de entrada se escoge una posición de partida de 30° y un ángulo de oscilacióntotal de 90°. Para la palanca de salida, elijase la posición de partida a 240° y tambiénun recorridototal de 90° . Una vez tomadas estas decisiones, pueden completarse el primero y último renglónmostrados en la tabla 10-3.A continuación, para obtener los valores de '" Y ti> correspondientes a los puntosde precisión,escríbase¡fJ = ax + b </> = cy + d ( 1 )y úsense l o s datos del primero y último renglones de l a tabla 1 0-3 para evaluar
las constantes a, b,e y d. Cuando se hace esto, se encuentra que las ecuaciones ( 1 ) son¡fJ = 9Ox - 60 </> -l80y + 420 (2)Ahora se pueden usar estas ecuaciones con el fin de calcular los datos para losrenglones restantesde la tabla 1 0-3 y determinar las escalas de las palancas de entrada y salida del eslabonamientosintetizado.Abora tómense los valores de ¡fJ y </> de la segunda línea de la tabla 10·3 y sustitúyanse82 y 8.por ellos en la (10-8). Repítase esta operación para la tercera y cuarta líneas . Entonces se tienenlas tres ecuaciones
KI cos 36.03 + Kz cos 25 1 .34 + K3 = cos (36.03 - 251 .34)KI cos 75.00 + K2 cos 300.00 + K3 = cos (75.00- 300.00)K¡ cos 1 13.97 + K! cos 326.94 + K3 cos(l 13.97 - 326.94)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 355/508
(3)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 356/508
372 TEORlA DE MÁQUINAS Y MECANISMOSCuando se llevan a cabo las operaciones indicadas, se tiene0.8087 K¡ - 0.3200K2 + K3 = -0.8160O.2588K¡ + 0.5000K2 + K3 = -0.7071 ¡-0.4062K¡ + 0.838 t K2 + K3 = -0.8389Después de resolver las ecuaciones (4), se obtiene
K2 = 0.4032Utilizando TI = 1 unidad, de la (10-9) se obtiene'¡ too 48 ''4 = K¡ = 0.40322. urutsDel mismo modo, basándose en las ecuaciones (10-10) y (10- 1 1), resulta que'2 2.48 units ') = 0.968 unitEl resultado es el eslabonamiento cruzado que se ilustra en la figura 10-27.(4)Freudenstein ofrece las siguientes sugerencias que serán de gran ayuda parasintetizar tales generadores:l . Los ángulos totales de oscilación de los elementos de entrada y salida deben ser
menores que 1200 2. Evítese la generación de funciones simétricas tales como y = X2en el intervalo- l s x s 1.3. Evítese la generación de funciones que tengan cambios de pendiente abruptos.10-14 SlNTESIS DE LOS MECANISMOS DE DETENCIÓNUno de los usos más i nteresantes de las curvas del acoplador que tienen segmentos rectilineos o de arco circular, es en la síntesis de mecanismos que poseen unadetención sustancial durante una porción de su periodo de operación. Al utilizarsegmentos de curvas del acoplador no es difícil sintetizar eslabonamientos con una
Figura 10-27
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 357/508
c2I / II II I, / \ ----;"'--__ C¡,- ,/ D¡, D2, D3\\- .. Curva del acoplador(a)SíNTESIS DE ESLABONAMIENTOS 373/ / /
'-//---- ) // //// / 1//"'"- Curva del ac oplador /(b)Figura 10-28 Síntesis de mecanismos de detención; en ninguno de los casos se ilustrael eslabonamientode cuatro barras que genera la curva del acoplador. a) El eslabón 6 se detiene mie
ntras el punto erecorre la trayectoria de arco circular C,C2C3; b) el eslabón 6 se detiene mientras el punto e se desplazaa lo largo de la porción recta de la curva del acoplador.detención, en cualquiera de los extremos de su movimiento o en ambos, o bien, enun punto intermedio.En la figura 10-28a se seleccionó una curva del acoplador que tiene aproximadamenteuna forma elíptica, del atlas de Hrones y Nelson, de tal modo que unaporción sustancial de la curva se aproxima a un arco circular. Conectando eleslabón 5 se le da entonces una longitud igual al radio de este arco. Por tanto, enla figura, los puntos Dr, D2 Y D3 son estacionarios en tanto que el punto del
acoplador C se mueve pasando por las posiciones el. e2 y e3 La longituddel eslabón de salida 6 y la localización del punto del marco 06 dependen del ángulode oscilación deseado de este eslabón. También se debe colocar el punto delmarco para obtener un ángulo de transmisión óptimo .Figura 1(1..29 Figura para sobreponer que se usa con el atlas de Hrones y Nelson.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 358/508
374 TEORíA DE MÁQUINAS Y MECANISMOSL Curva del acoplador.. ..---- -------// - -C ---....... '".. j/\ .. /I , .. / / .. .. / / .. .. / / .. .. / / .. " / / '" --'
(b)Figura 10-30 a) El eslabón 6 se detiene en cada extremo de su oscilación. b) El eslabón 6 se detiene en laporción central de su oscilación.Cuando se desean segmentos de arcos circulares para la curva del acoplador,conviene seguir un método organizado de búsqueda en el atlas de Hrones y Nelson.La figura para sobreponer, ilustrada en la figura 10-29, se realiza en un papeldelgadoy se puede ajustar sobre las trayectorias del atlas con suma rapidez. Estafigura revela inmediatamente el radio de curvatura del segmento, la ubicación delpunto pivote D y el ángulo de oscilación del eslabón conectador.En la figura 1O-28b se muestra un mecanismo d.. detención que emplea una
corredera. Se usa una curva del acoplador con un segmento rectilíneo, y el puntopivote 06 se sitúa sobre una extensión de esta recta.La configuración ilustrada en la figura 10-300 tiene una detención en ambosextremos del movimiento. Sin embargo, es un tanto difícil lograr una configuraciónpráctica de este mecanismo, porque el eslabón 6 tiene una velocidad muyelevada cuando la corredera está cerca del pivote 06 El mecanismo de corredera de la figura 1 O-30b usa una curva del acopladorcon la forma de un ocho, la cual tiene un segmento rectilíneo para producir uneslabonamiento con detención intermedia. El pivote 06 debe localizarse sobre unaextensión del segmento rectilíneo, como se indica.10-15 MOVIMIENTO ROTATORIO INTERMITENTELa rueda de Ginebra, o cruz de Malta, es un mecanismo parecido al de las levasque suministra un movimiento rotatorio intermitente y se emplea profusamente
tanto en maquinaria de baj a velocidad como de alta. Aunque originalmente sedesarrolló como un tope para evitar dar cuerda en exceso a los relojes , en la actualidadse emplea con amplitud en la maquinaria automática, por ejemplo , cuandose deben marcar distancias determinadas en árboles, torretas o mesas de tra-
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 359/508
SlNTESIS DE ESLABONAMIENTOS 375Rueda de GinebraFigura 10-31 Mecanismo de Ginebra.bajo. También se utiliza en proyectores de películas para proporcionar el avanceintermitente de las mismas .En la figura 10-31 se muestra un dibujo de un mecanismo de Ginebra de seis
ranuras. Nótese que las líneas de los centros de la ranura y la manivela son mutuamenteperpendiculares al encastrarse y al desencastrarse. La manivela, que casisiempre gira con una velocidad angular uniforme, lleva un rodillo que se encajaenlas ranuras. Durante una revolución de la manivela, la rueda de Ginebra gira unafracción de una revolución, cantidad que depende del número de ranuras. El segmentocircular que va unido a la manivela realmente evita que la rueda gire cuandoel rodillo está desencastrado, y también coloca a la rueda para que se efectúe unencaje correcto del rodillo con la siguiente ranura.El diseño de un mecanismo de Ginebra se inicia especificando el radio de lamanivela, el diámetro del rodillo y el número de ranuras. Se requieren por lo
menos tres ranuras, pero la mayor parte de los problemas se pueden resolver conruedas que tienen de cuatro a doce ranuras. En la figura 10-32 se ilustra el procedimientode diseño. El ángulo {3 es la mitad del ángulo subtendido por ranurasadyacentes; es decir{3 = 3602n( a)en donde n es el número de ranuras en la rueda. En consecuencia, al definir rzcomo el radio de la manivela. se tienerz c =--sen {3 (b)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 360/508
376 TEORIA DE MÁQUINAS Y MECANISMOS\ Radio real de la ruedaCentro d..rodillo.. .. R.d.. "'. .., .. \mm..' ---t.í or''') '\°2 03C-.L...o-I
\ Radio teórico de la rueda1)Figura 10-32 Dísefto de una rueda de Ginebra.en donde e es la distancia entre los centros. En la figura 1 0-32, nótese también queel radio real de la rueda de Ginebra es mayor que el que se obtendría con un rodillode diámetro cero. Esto se debe a la diferencia entre el seno y la tangente delángulo subtendido por el rodillo, medido desde el centro de la rueda.Después de que el rodillo ha entrado en la ranura y está impulsando a larueda, la geometría es la de la figura 1 0-33 . Aquí, fh es el ángulo de la manivela y
93 el de la rueda. Estos ángulos se relacionan trigonométricamente mediantet 9sen 92an 3 =(el r2) ---'CO"-S-()-2 (e)Se puede determinar la velocidad angular de la rueda para cualquier valor de ()2'derivando la ecuación (e) con res pecto al tiempo; lo cual da(c!r2) COS 92 1W3 - w ..............-.... - 2 1 + (c2Id) - 2(c/r2) COS ()2Figura 10-33( 10- 12)
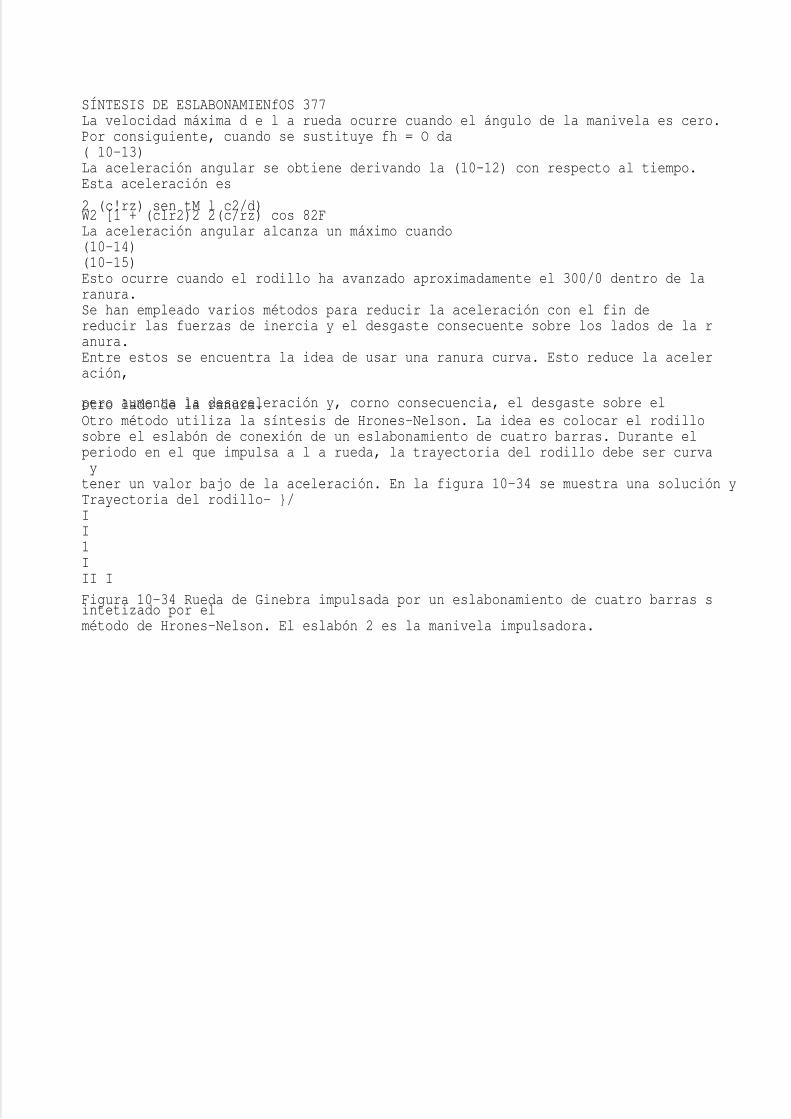
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 361/508
SÍNTESIS DE ESLABONAMIENfOS 377La velocidad máxima d e l a rueda ocurre cuando el ángulo de la manivela es cero.Por consiguiente, cuando se sustituye fh = O da( 10-13)La aceleración angular se obtiene derivando la (10-12) con respecto al tiempo.Esta aceleración es
2 (c!rz) sen tM l c2/d)W2 [1 + (clr2)2 2(c/rz) cos 82FLa aceleración angular alcanza un máximo cuando(10-14)(10-15)Esto ocurre cuando el rodillo ha avanzado aproximadamente el 300/0 dentro de laranura.Se han empleado varios métodos para reducir la aceleración con el fin dereducir las fuerzas de inercia y el desgaste consecuente sobre los lados de la ranura.Entre estos se encuentra la idea de usar una ranura curva. Esto reduce la aceleración,
pero aumenta la desaceleración y, corno consecuencia, el desgaste sobre elotro lado de la ranura.Otro método utiliza la síntesis de Hrones-Nelson. La idea es colocar el rodillosobre el eslabón de conexión de un eslabonamiento de cuatro barras. Durante elperiodo en el que impulsa a l a rueda, la trayectoria del rodillo debe ser curvaytener un valor bajo de la aceleración. En la figura 10-34 se muestra una solución yTrayectoria del rodillo- }/II1III I
Figura 10-34 Rueda de Ginebra impulsada por un eslabonamiento de cuatro barras sintetizado por elmétodo de Hrones-Nelson. El eslabón 2 es la manivela impulsadora.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 362/508
378 TEORíA DE MÁQUINAS Y MECANISMOSFigura 10-35 Mecanismo de Ginebra inverso.se incluye la trayectoria tomada por el rodillo. Esta es la trayectoria que se busca alhojear el libro.El mecanismo inverso de Ginebra de la figura 10-35 permite que la rueda gire
en la misma dirección que la manivela y requiere un espacio radial menor. No semuestra el dispositivo de cierre, pero éste puede ser un segmento circular sujetoala m anivela como se mostró antes, que cierra frotándose contra un borde en laperiferia de la rueda.PROBLEMAS10-1 Una función varia de O a 1 0. E ncuéntrese el espaciamiento de Chebychev para dos , tres, cuatro,cinco y seis pu ntos de precisión.10-2 Determinense las longitudes de los eslabones de un eslabonamiento de corredera y manivela paratener una carrera de 600 mm y u na razón de tiempos de 1 .20.
10-3 Determinense un conjunto de longitudes de los eslabones para un eslabonamiento de corredera ymanivela tal que la carrera sea de 16 pulg y la razón d e tiempos, 1 .25 .10-4 El oscilador de un eslabonatniento de manivela y oscilador debe tener u nalongitud de 500 mm yoscilar recorriendo u n ángulo total de 450 , con una razón de tiempo de 1 .25. Determínese un conjuntode dimensiones apropiadas para rI. r2 Y rJ.10-5 Un meca nismo de manivela y oscilador debe tener un o scilador con 6 pies de longitud y un ángulode oscilación de 750 Si la razón de tiempos debe ser 1 .32, ¿cuáles son un conjunto apropiado de longitudesde los eslabones para los tres eslabones restantes?
10-6 Diséñese una manivela y un acoplador para impulsar al oscilador 4 de la figura,de tal manera quela corredera 6 tenga un movimiento alternativo en una distancia de 1 6 pulg conuna razón de tie mpos de1 .20. Sea a '4 16 puIg Y r5 = 24 pulg. con '4 vertical a la mitad de la carrera. Regístrese la u bicaciónde O2 y las d ime nsiones '2 y '3.10-7 Diséjíese una manivela y un oscilador para un mecanismo de seis eslabones tal que la correderade la figura correspondiente al problema 10-6 tenga un movimiento alternativo enuna distancia de

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 363/508
SíNTESIS DE ESLABONAMIENTOS 379AsientoB y - ..l -12·==:J 16"1-<------20"-------;.JProblema 10-6 Problema 10-9
800 mm con una razón de tiempos de 1 . 1 2. Sea 1 a r4( 1 200 mm y rs = 1 800 mm.Localícese 04de tal manera que el oscilador 4 quede vertical cuando la corredera se encuentraa la mitad de carrera.Encuéntrense coordenadas apropiadas para O2 y las longitudes para r2 Y rJ.10-8 Diséñese un mecanismo de manivela y oscilador con un ángulo óptimo de transmisión, una razónde tiempos igual a la unidad y u n ángulo del oscilador de 45°, con una longitud de éste de 250 mm.Utilícese la gráfica que aparece en la figura 1 0-6 Y sea 'Yrnln = 50°. Hágase un dibujodel eslabonamientopara encontrar y verificar 'Yrnln 'Yrnáx ,p.
10-9 En la figura se muestran dos posiciones de un asiento plegable de los que se utilizan en los pasillosde los autobuses para dar acomodo a pasajeros adicionales. Diséñese un eslabonamiento de cuatrobarras para sostener el asiento de tal modo que se fije con seguridad en la posición de abierto y quedeen una posición cerrada estable en el lado del pasillo.10-10 Diséñese un eslabonamiento de cuatro barras que funcione mediante resortes y sirva para sosteneruna cubierta pesada como la del cofre de un automóvil. La cubierta debe describirun ángulo de 80°,desde la posición de cerrada hasta la de abierta. Los resortes se montarán de tal modo que la cubierta se
mantenga cerrada contra un tope, y también se mantenga en una posición abierta estable sin necesidadde utilizar un tope.10-11 En la parte (a) de la figura, sinteticese un eslabonamiento para mover a AB de la posición 1 a laposición 2 y de regreso.10-12 En la parte (h) de la figura, sintetícese un mecanismo para mover a AB sucesivamente por lasposiciones 1, 2 y 3.I B1(2.7) 10" 5" A2 ..B2 (5. 4)A l (2. 2)(al
Problemas 10-11 Y 10-12yAl A2 (2, 6) ..Bl(8.6) jA302,6) 50· .,--B2 (9. 2 ) B _3 __ x(b)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 364/508
380 TEORtA DE MÁQUINAS Y MECANISMOSProblemas 10-13 a 10-22/ / ".-----...... .... / 'V-\ Cacuorvpala ddeolrI \I \I \
\ 1\ I\ I\ I\\ II \\ II " I.... "'-- eProblema 10-3310-13 a 10-22 t En la figura se presenta un eslabonamiento generador de función enel que el movimientodel oscilador 2 corresponde a x y el movimiento del oscilador 4 a la función y f (x). Úsensecuatro puntos de precisión y el espaciamiento de Chebychev, y sintetícese un eslabon
amiento paragenerar las funciones indicadas en la tabla adjunta. Trácese una curva de la funcióndeseada y otra dela función real que genera el eslabonamiento. Calcúlese el error máximo entre eUos, expresándolo conun porcentaje.Número del problema Función y Intervalo de x10-13, 10-23 !oglo x l :s x :s 210-14, 10-24 sen x O :s x :s 71"/210-15, 10-25 tan x O :s x s 71"/410-16, 10-26 eX O s x s l10-17, 10-27 llx I s x s 210-18, 10-28 x l.S O s x :s 1
10.19, 10-29 X2 O s x s l10-20, 10.30 x2.5 O s x :S l10-21, 10-31 x3 O :s x :S l10-22, 10.32 X2 - 1 S X s 110.23 a 10-32 Repítanse los problemas 10-13 a 10-22 utilizando el método de la sobreposición de lafigura.10.33 En la figura se ilustra una curva del acoplador que se puede generar mediante un eslabonamientode cuatro barras (no ilustrado). El eslabón S se debe fijar al punto del acopladory el 6 será un miembrogiratorio cuya conexión sobre el marco es 06 , En este problema se desea encontrar
una curva delacoplador en el atlas de Hrones y Nelson, o bien, por reducción de la posición del punto, de tal maneraque, para una distancia apreciable, el punto e describa un arco de un círculo. Luego se da una dimensiónal eslabón S de tal modo que D quede en el centro de curvatura de este arco. El resultado sedenomina entonces movimiento de vacilación porque el eslabón 6 vacilará en su rotación durante elperiodo en que el punto e describe el arco cirCular aproximado . Hágase un dibujodel eslabonamientot F. Freudenstein de la Columbia University obtuvo soluciones en una computadoradigital para
estos problemas: véase ¡bid.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 365/508
StNTESIS DE ESLABONAMIENTOS 381completo y trácese el diagrama velocidad-desplazamiento para 360° de desplazamientodel eslabón deentrada.10-34 Sinteticese un eslabonamiento de cuatr'J barras para obt ener una curva del acoplador con un segmento
rectilineo aproximado. Luego, aplicando la sugerencia incluida en la figura 10-28 o la 1O-30b,sintetícese un movimiento de detención. Con una velocidad angular u nitaria de la manivela de entrada,trácese la gráfica de la velocidad del oscilador 6 contra el desplazamiento de la manivela de entrada.10-35 Sinteticese un mecanismo de detención aplicando la idea sugerida en la figura 10-28a y el atlas deHron es y Nelson. El oscilador 6 debe te:Jer u n desplazamiento angular total de60° . Utilizando este desplazamientocomo abscisa, trácese u n diagrama de velocidad del movimi ento del oscilador parailustrar
el movimiento de detención.- t

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 366/508
CAPITULOONCEMECANISMOS ESPACIALES11-1 INTRODUCCIÓN A LOS ESLABONAMIENTOS ESPACIALESComo se vio en la sección 1-5, la gran mayoría de los mecanismos en uso hoy endía son mecanismos planos; es decir, los movimientos de todos los puntos producen
trayectorias que se encuentran en planos paralelos. Aunque este es el casousual, no es una necesidad, y los mecanismos que tienen trayectorias tridimensionales,más generales, de los puntos reciben el nombre de mecanismos espaciales.Otra categoría especial abarca los mecanismos esféricos, en los que todos los puntos quedan sobre superficies esféricas concéntricas.Aunque estas definiciones se presentaron en el capítulo 1, casi todos los ejemplos de los capítulos anteriores se han ocupado de mecanismos planos. Esto se justifica debido a su uso tan extendido en situaciones prácticas. Aunque unos cuantos
mecanismos no planos, como las articulaciones u'niversales se conocen desde hacevarios siglos, no fue sino hasta hace relativamente poco quelos especialistas en cinemática se han interesado en desarrollar procedimientos de diseño para otros mecanismos espaciales.Aunque hasta ahora nos hemos concentrado en ejemplos de movimientoplano, un breve repaso mostrará que la mayor parte de la teoría anterior se hadeducido con la generalidad suficiente como para aplicarla al movimiento plano o al espacial. Se han propuesto ejemplos en el plano ya que se pueden visualizarmejor y requieren cálculos menos tediosos que el caso tridimensional. Con todo, la mayor parte de la teoria antes presentada se extiende directamente hacia los
mecanismos espaciales.En la sección 1-6 se explicó que se puede obtener la movilidad de una cadenacinemática partiendo del criterio de Kutzbach, La forma tridimensional del criterio
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 367/508
se dió en la ecuación (1-3),en donde m = movilidad del mecanismon = número de eslabonesMECANISMOS ESPACIALES 383(11-1)ii = número de articulaciones que tienen i grados de libertad
Una de las soluciones de la (11-1) es n = 7, i¡ = 7, Í2 i3 = i4 = is = O Harrisbergerdenomina a esto un tipo de mecanismo, t en particular, el tipo 711 Otrascombinaciones de los ii producen otros tipos de mecanismos. Por ejemplo, eltipo' 3i¡ + 2h tiene cinco eslabones, en tanto que el tipo 1i¡ + lj3 cuentan sólo contres éslabones.Cada tipo de mecanismo contiene un número finito de clases de mecanismos;existen tantas clases de mecanismos en cada tipo como maneras hay de combinardiferentes clases de articulaciones. En la 'tabla 1-1 se vio que tres de los seis paresinferiores tienen un grado de libertad. Estos son la revoluta R, el prismático P yel
tornillo S. Por ende, si se utilizan 7 de cualesquiera estos pares inferiores seobtienen36 clases de mecanismos tipo 7i¡ . En conjunto, Harrisberger lista 435 clasesque satisfacen el criterio de Kutzbach. Sin embargo, no todos estos tipos, o clases,es probable que tengan valor práctico. Considérese, por ejemplo, el tipo 7j¡ contodos los pares de revoluta; esto define un eslabonamiento, con siete eslabonesysiete articulaciones de revoluta.En el caso de mecanismos que, según el criterio de movilidad. se definen comoposeedores de una movilidad de 1, Harrisberger ha seleccionado nueve clases de lostipos que parecen ser útiles; estos se ilustran en la figura 11-1. Todos ellos son
eslabonamientos espaciales de cuatro barras que tienen cuatro articulaciones, conelementos de entrada y salida giratorios o deslizantes. Las designaciones en laleyenda, como RGCS en la figura l1-1f, por ejemplo, identifican los tipos de parescinemáticos (véase la tabla 1-1), principiando con el eslabón de entrada y pasandopor el acoplador y el elemento de salida, para retornar al marco. Por ende, parael RGCS, la manivela de entrada gira respecto al marco alrededor de la revolutaR yrespecto al acoplador alrededor del par globular G. El acoplador forma un par con
el elemento de salida mediante el cilindro C. El movimiento del elemento desalida queda determinado por el par de tornillo S (del inglés screw). Según la tabla 1-1, las libertades de estos pares son R = 1, G = 3, C = 2 Y S = 1.Los eslabonamientos de las figuras 11-1a a c fueron descritos por Harrisbergercomo mecanismos del tipo 1. Cada uno de ellos está compuesto por un par de unsolo grado de libertad y tres pares de libertad doble; de donde, es un mecanismo del tipo li¡ + 3h. Los demás eslabonamientos de la figura 11-1 son del tipo 2, quetienen dos pares de un grado de libertad, un par de libertad doble y un par delibertad triple. Por ende, pertenecen al tipo 2j¡ + lj2 + lh.t L. Harrisberger, "A Number Synthesis Survey of Three·Dimensional Mechanisms", J.Eng. Ind.,
ASME Trans., series B, vol. 87, no. 2, 1965.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 368/508
cr'..... ..0!lo' (")c:: §" .. ::l.!lo' O-o"" '" !lo'Q . .. ..or:: ..= '"¡; ::!(1) ¡t () lO wO g .. '" 0.1:: ..... (\) S Q. g.g ::! (I)..(1) o. '" (1) "" . (Jq(1) .. S O =.. .. O'" S(1)-§""' (I)<1>.... '" ..'8 .. !lo'"" S .... W.. ..... O . 1'1>(1)e. (1)e. (1)e. !:1 '" "" P!lo
"O() "" '" .. r::, OS =r::, fl¡;S !!...o!lo'.. .., ()...... .., . (1)r:: N!lo' .... ... (1)'" =O- O.. ... ::r'" o. g¡ !lo' (1) ...., !:1 (1) ::r.P ¡:¡ ()E. . O:5 . O = .. [; o.(1) .. o.O-t::;jl'l> g ('1) O I I ='"'"I "'"' N..>00""z "..O00...... n
;;;00......(a) (b)/""G(g)Figura 11-1 Eslabonamientos espaciales de cuatro barras con movilidad de 1: a) RCCC; b) PCCCC; c) SLCCC; d)ROCR; e) ROCP; f) RGCSL: g) PPGC; h) PSLGC; 1) S"SLGC. (Tomado de L. Harrisberger., A Number SynthesísSurvey 01 Three-Dimensional Mechanisms, J. Eng. Ind. ser. B, vol. 87, no. 2, may
o, 1965, publicado con autorizaciónde la ASME y el autor del artfculo.) En esta obra, un par de tornillos se designa mediante el slmbolo S; peroHarrisberger utiliza SL; es probable que el subindice se refiera al avance (en inglés, lead) de un tornillo.Wr;lO..>'51..:tc:: ......Vl -<
..tn &?Z ..CilVlO
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 369/508
MECANISMOS ESPACIALES 385Figura 11-2 Eslabonamiento esférico de cuatro barras.gitudes de los eslabones, o la orientación de ejes de pares con una sola libertad,esfactible introducir libertades no esenciales o restricciones no esenciales.Por lo menos dos de los eslabonamientos espaciales conocidos que violan el
criterio de Kutzbach, son mecanismos RRRR de cuatro eslabones. Asi pues, n = 4,jI = 4, Y la ecuación (11-1) da m = -2, de manera que se llega a la conclusión deque hay tres restricciones no esenciales. Uno de estos mecanismos es el eslabonamientoespacial esférico de cuatro barras ilustrado en la figura 11-2. Los ejes delas cuatro revolutas se intersecan en el centro de una esfera, y los eslabones sepueden considerar como arcos de círculo máximo que existen sobre la superficie dela esfera. Entonces sus longitudes se designan como ángulos esféricos. Dando unaproporción adecuada a estos ángulos, se pueden diseñar todos los equivalentes esféricosdel mecanismo plano de cuatro barras, como por ejemplo, el eslabonamientoesférico de manivela y oscilador y el eslabonamiento esférico de arrastre. El
eslabonamiento esférico de cuatro barras es fácil de diseñar y fabricar y, por ende,es uno de los mecanismos espaciales más útiles. La muy conocida articulación deHooke, o Cardan, que es la base de la articulación, o unión universal, constituyeun caso especial del mecanismo esférico que tiene manivelas de entrada y salidaqosucei lsaunbtet,i enden el mismo ángulo en el centro de la esfera. El mecanismode placa que aparece en la figura 11-3, también es un caso especial.El mecanismo RRRR de Bennett que se muestra en la figura 11-4, es probablementeuno de los más inútiles de los eslabonamientos espaciales conocidos.En este mecanismo, los eslabones opuestos están torcidos la misma cantidad ytienen también longitudes iguales. Los ángulos de torsión al Y a2 deben estartambién en proporción a las longitudes de los eslabones, al Y a2, según laecuaciónsenal sen --=
al az(11-2)El mecanismo espacial RGGR de cuatro eslabones de la figura 11-5 es otroeslabonamiento importante y de gran utilidad. Puesto que para n = 4, il = 2, Y

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 370/508
386 TEORIA DE MAQUINAS y MECANISMOSFigura 11-3 Mecanismo de placa oscilante; la manivela de entrada 2 gira y el ejede salida 4 oscila,Cuando 1) .. 900 el mecanismo se conoce con el nombre de oscilador de deslizamiento esférico. Si r > 8.el eje de salida gira.
Figura 11-4 Mecanismo de cuatro eslabones de Bennett.i3 = 2, el criterio de movilidad de la ecuación (11-1) predice que m 2. Aunque, aprimera vista ésta podría parecer otra excepción, si se le examina con cuidado seencuentra que en realidad existe el grado adicional de libertad; se trata de laliber-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 371/508
MECANISMOS ESPACIALES 387tad del acoplador para girar alrededor de su propio eje. Ya que esto no afecta larelación cinemática de entrada-salida, se conoce con el nombre de libertad no esencial.Esta libertad adicional no perjudica si la masa del acoplador se distribuye a lo
largo de su eje; de hecho, puede resultar una ventaja porque es fácil de fabricaryla rotación de acoplador alrededor de su eje debe igualar el desgaste en las dos articulacionesde rótula. No obstante, si el centro de masa del acoplador queda fueradel eje, esta libertad adicional no es dinámicamente no esencial y puede causar un comportamiento bastante errático a gran velocidad.Todavía otras excepciones al criterio de movilidad son el mecanismo de cincobarras y cinco revolutas de Goldberg (no de Rube) y el eslabonamiento de seisbarras y seis revolutas de Bricard. t Una vez más, es dudoso que estos mecanismos
tengan algún valor práctico.Harrisberger y Soni han tratado de identificar todos los eslabonamientos espacialesque tienen una restricción general. * Han identificado 8 tipos y 212 clasesy han descubierto 7 nuevos mecanismos que pueden tener cierta utilidad.11-3 PROBLEMA DE L A POSICIÓNAl igual que los mecanismos planos, un mecanismo espacial se conecta casi siemprede tal modo que forme un circuito cerrado. Por consiguiente si se siguenmétodos similares a los de la sección 2-6, es factible escribir una ecuación de cierre del circuito que defina las relaciones cinemáticas del mecanismo. Hay un ciertonúmero de formas matemáticas diferentes que se pueden usar, incluyendo vectores,
números duales y cuaterniones § al igual que matrices .. . Para seguir la mismatónica en toda la obra, se utilizará la notación vectorial. La condición de cierre delcircuito para un eslabonamiento espacial como el mecanismo de la figura 11-5, se puede definir por medio de una ecuación vectorial de la formar+s+t+C O (11-3)Esta expresión se conoce con el nombre de ecuación vectorial del tetraedro, debidoa que se puede concebir a cada uno de los vectores como si definiera cuatro de lasseis aristas de un tetraedro.La ecuación vectorial del tetraedro es tridimensional y, por ende, se puederesolver para tres incógnitas escalares. Estas pueden existir en cualquier combit
Si se desean tener ilustraciones de estos, véase la obra de R.S. Hartenberg y J. Denavit, KinematicSynthesis of Linkages, McGraw-HilI, New York, 1964, pp. 85-86.:j: L. Harrisberger y A.H. Soni, "A Survey of Three-Dimensional Mechanisms withOne General Constraint",ASME papo 66-MECH-44, October 1966. Esta publicación contiene 45 referencias sobre mecanismos espaciales.§ A.T. Yang y F. Freudenstein, "Aplication of Dual-Number and Quaternian Algebra to the Anaiysisof Spatial Mechanisms", J. Appl, Mech., ASME trans., ser. E. vol. 86, pp. 300-308,1964.11 J.J. Uicker, Jr., J. Denavit y R.S. H artenberg, HAn Iterative Method for the
Displacement Analysisof Spatial Mechanisms", J. Appl. Mech., ASME Trans., ser . E. vol. 87, pp. 309-314, 1965.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 372/508
388 TEORÍA DE MÁQUINAS Y MECANISMOSFigura 11-5 El eslabonamiento RGGR.RAo, I pulg, RBA '" 3.5 pulg, RBo. '" 4pulg.nación en los vectores r, s y t. El vector e es la suma de todos los vectores conocidos
en el circuito. Si se usan coordenadas esféricas, cada uno de los vectores r,So y t se puede expresar como una magnitud y dos ángulos. Por ejemplo, el vector r se define una vez que se conoce su magnitud r y dos ángulos, Or y ePr' Por tanto,en la (11-3), tres cualesquiera de las nueve cantidades r, O,., eP" s, O., eP ..t, ()h Y ePIpueden ser incógnitas. Cuando estas se resuelvan se obtiene justamente nueve combinacionesde las incógnitas que conducen a soluciones diferentes. Chacet ha resueltoestos nueve casos, reduciendo primero a cada uno de ellos a un polinomio.Chace clasifica las soluciones dependiendo de si las incógnitas se presentan en uno,
dos o tres vectores, y tabula las formas de las soluciones como se indica en latabla ll-l. En esta tabla, los vectores unitarios ro,., ro, y rot son direcciones conocidas deTabla 11-1 Oasificaci6n de las soluciones para la ecuación vectorlaldel tetraedroNúmero Cantidades conocidasdel Grado delcaso Incógnitas Vectoriales Escalares polinomior, 8" 4>, e 12a r, 8,., s C.. s., c;" 4>, 22b r, 8" 8, C, c:d" '-$ 4>" s, 4>, 42e 8" 4>n s e,s r 22d e,., 4>" 8, e,ro, r, s, 4> 2
3a r, s, t e,r,s,t I3b' r, s, 8, C,i,s,Wr t,4>, 23e: r, e" e, C,r,ws,w, s, 4>" t, 4>, 43d en 8" 8, C,..nronWt r, 4>" s, 4>" t, 4>, 8t M. A. Chace, "Vector Analysis of Linkages", J. Eng. Ind., ASME Trans., ser. B,voL 85, no. 3,pp. 289-297, 1963.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 373/508
MECANISMOS ESPACIALES 389los ejes a partir de las cuales se miden los ángulos conocidos <l>n <l>s y <l>t. En elcaso 1, los vectores s y t son completamente conocidos y al sumarse dan el vectorC.En los casos 2a, 2b, 2c Y 2d se conoce el vector t y al sumarse C.Los casos 3a
,3b, 3c y 3d tienen incógnitas en cada uno de los vectores r, s y t.Una ventaja importante de las soluciones de Chace para las ecuaciones vectorialesdel tetraedro es que, puesto que proporcionan formas conocidas para lassoluciones de los nueve casos, es fácil escribir una familia de nueve subprogramas para hacer una evaluación por computadora o calculadora. Estos seguirían el mismoprocedimiento general que se describió en la sección 5-3 para las ecuacionesequivalentes en el plano. Todos los nueve casos, a excepción del 3d, se han reducidoa soluciones explícitas de forma cerrada para las incógnitas y, por ende, se
pueden evaluar con gran rapidez. Sólo el paso 3d, que comprende la solución deun polinomio de octavo orden, se debe resolver mediante técnicas iterativas.Aunque la ecuación vectorial del tetraedro y sus soluciones de los nueve casosse pueden utilizar para resolver la mayor parte de los mecanismos espaciales prácticos,se recordará, por lo que se dijo en la sección 11-1, que el criterio de Kutzbachpredice la existencia hasta de siete articulaciones jI en un mecanismo de unsolo circuito, con un grado de libertad. Un caso como el mecanismo 7R, por ejemplo,tendría seis incógnitas a resolver, a partir de la ecuación de cierre del circuito.Esto no es posible a partir de la forma vectorial de la ecuación de cierre del circuito,por lo que es necesario utilizar en su lugar cuaterniones duales o matrices.
Este tipo de problemas conducen también a polinomios de muy alto orden y requieren soluciones iterativas para su evaluación final. Cualquiera que intente resolvereste género de ecuaciones por medio de técnicas algebraicas manuales, se percataráinmediatamente de que el análisis de posición, y no el de velocidad o aceleración,es el problema más dificil en la cinemática.11-4 ANÁLISIS DE POSICIÓN DEL MEC ANISMO RGGRResolver los polinomios de la ecuación vectorial del tetraedro de Chace resulta serequivalente a encontrar las intersecciones de rectas o círculos con diversas superficiesde revolución. Este género de problemas por lo común se puede resolver
rápida y fácilmente aplicando métodos gráficos de la geometría descriptiva. Elplanteamiento gráfico tiene la ventaja adicional de que no se oculta la naturaleza geométrica del problema en una multiplicidad de operaciones matemáticas.Usemos un mecanismo RGGR de cuatro eslabones, de manivela y oscilador,en el que los elementos conocidos son la posición y el plano de rotación del eslabónde entrada, el plano de rotación del eslabón de salida y las dimensiones de loscuatro eslabones. En la figura 11-5 se ilustra este mecanismo. El problema de la posición consiste en encontrar la posición del acoplador y el oscilador, eslabones 3 y 4. Si el eslabón 4 se trata como un vector, entonces la única incógnita es un ángulo,porque se dan la magnitud y el plano de oscilación. Del mismo modo, si el
eslabón 3 es un vector, se conoce su magnitud pero existen dos incógnitas que son

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 374/508
390 TEORÍA DE MÁQUINAS Y MECANISMOSlas dos direcciones angulares en coordenadas esféricas. Esta situación se identifica como el caso 2d de la tabla 11-1, que exige la resolución de un polinomio de segundogrado y, por ende, produce dos soluciones.
Este problema se resuelve empleando solo dos vistas ortográficas, el frente y elperfil. En la figura 11-5, si se imagina que se desconecta el acoplador B y se le permiteocupar todas las posiciones relativas a A, luego B, debe quedar sobre lasuperficie de una esfera cuyo centro está en A. Con el acoplador aún desconectado,el movimiento de B sobre el eslabón 4 es un círculo alrededor de 04, en unplano paralelo al plano yz. Por consiguiente, para resolver este problema sólo senecesita encontrar los dos puntos de intersección de un círculo con una esfera.La solución aparece en la figura 11-6. Los subíndices Fy P denotan proyeccionesen los planos frontal y de perfil, respectivamente. En primer lugar, localíceseO2, radio 04B = 4 pulg en torno a 04P; ésta es la trayectoria del punto B. Este círculo
aparece como una recta vertical MP()4FNF en la vista frontal. A continuación,en la vista frontal, constrúyase el contorno de una esfera con centro enAF y cuyo radio sea la longitud del acoplador AB = 3! pulg. Si se considera queMP()4FNF es la traza de un plano normal al plano frontal, la intersección de esteplano con la esfera aparece como el círculo sombreado, de diámetro MpNp sobrela vista de perfil. El arco de radio 04B se interseca con el círculo en dos puntos,dando dos soluciones. Uno de estos puntos se elige para Bp y se proyecta nue-I Radio/ ..4.. 4'l.. __ . __ ..Figura 11·6 Análisis gráfico de posición del mecanismo RGGR.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 375/508
MECANISMOS ESPACIALES 391vamente sobre la vista frontal para localizar Bp Ahora se trazan los eslabones 3y4, en este caso mediante líneas a trazos, en las vistas frontal y de perfil.Mediante la simple medición de las proyecciones x, y y z de la solucióngráfica, se pueden escribir las expresiones vectoriales de cada eslabón:
fl 3i -2kr2 0.707i 0.707jf3 2.301 + 1.95j + 1.77kr4 = 1.22j + 3.81k(11-4)en donde rh r2. r3 y r4 están dirigidos de O2 a 04, de O2 a A, de A a B y de 04 aB, respectivamente. Las componentes antes mencionadas se obtuvieron de unasolución de tamaño natural, por supuesto, se obtendria una mayor exactitud,haciendo los dibujos a 2 ó 4 veces su tamaño real.El mecanismo esférico de cuatro eslabones y cuatro revolutas ilustrado en lafigura 11-2 es el caso 2d de la ecuación vectorial del tetraedro, y se puede resolver
en la misma forma, cuando se da la posición del eslabón de entrada.11-5 ANÁLISIS DE LA VELOCIDAD Y LA DEL ESLABONAMIENTO RGGR ACELERACIÓNUna vez que se han encontrado las posiciones de todos los elementos de un mecanismoespacial, se pueden determinar las velocidades y aceleraciones aplicandolos métodos de los capítulos 3 y 4. Al analizar los mecanismo planos, las velocidadesy aceleraciones angulares fueron siempre perpendiculares al plano delmovimiento y, por ende, contaban sólo con una componente vectorial diferente decero. En el análisis de los eslabonamientos espaciales, estos términos pueden tenertres componentes, pues sus ejes pueden ser oblicuos en el espacio. Por lo demás,los métodos de análisis son los mismos; y el siguiente ejemplo servirá para ilustrarestas diferencias.
Ejemplo 11-1 La velocidad angular del eslabón 2 del eslabonamiento RGGR de cuatrobarras queaparece en la figura 11-7 es .. 40k rad/s. Encuéntrese la velocidad y aceleración angulares delos eslabones 3 y 4, así como la velocidad y aceleración del punto B.SOLUCIÓN Si se aplica la geometría descriptiva para resolver el problema de posición,como seexplicó en la sección 11-4, se obtiene el dibujo de tres vistas del eslabonamiento,ilustrado en lafigura ll-8. Ahora se sustituyen 02A, AB Y O,B con los vectores f2, r, y f respectivamente.Los componentes se pueden leer directamente en la figura 11-8:
f; = 101 + 2.711 + IO.S9k r. 6.171 + 7.89kPor las restricciones impuestas, se ve que las velocidades y aceleraciones angulares se pueden escribircomo«)1 = 40k rol = wti + wd + w\k 004 = wJ<x!=O <x;=aji+a:j+ajk íl4=aJ

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 376/508
392 TEORÍA DE MÁQUINAS Y MECANISMOSFigura 11-7 RAo, = 4 pulg., RBA = 15 pulg., RBo" = lOpulg.En primer lugar, se encuentra V A como la diferencia de velocidad respecto al punto O2 Por consiguiente,,I
J Plano xz (vistasuperior)Plano xy (vista frontal)Figura 11-8 Ejemplo 1-1: análisis de posición.11.531 + 6.67jz I °4Pt"'····--7.89·--....¡... 1Plano yz (vista de perfil)(l)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 377/508
MECANISMOS ESPACIALES 393Del mismo modo, hl1..0.. 2¿.7;1 = (O.908w; 0.226wÜI + (0.833w.. O.908wDj + (0.226w3-O.833wDkY, por último,6.Oj1 7 .. ¡ = -O.658w4J + 0.514w; 7.89(2)
(3)El siguiente paso consiste en sustituir las ecuaciones (1) a (3) en la ecuación dediferencia develocidad(4)Cuando se hace esto, se pueden reparar las componentes i, j y k para obtener tres ecuaciones algebraicasO.908w; -O.226w -O.908w.. +O .833wj + 0.658wí4 == 1 -16.5.637 0.226w{ -O.833w.. -0.514w4 O(5) (6) (7)Sin embargo, se observa que hay cuatro incógnitas, w.., w... wl y W4' Esto no ocurriría normalmente
en la mayor parte de los problemas, pero aquí sucede debido a la libertad no esencialdel acoplador para girar en tomo a su propio eje. Puesto que este giro no afectará la relación deentrada-salida, se obtendría el mismo resultado para W4, fuera cual fuere esta rotación. Por consiguiente,se puede hacer igual a cero una de las componentes de WJ y proseguir. Otro métodoconsiste en hacer que la velocidad del acoplador alrededor de su eje sea cero, requiriendo que0)3' 0.833w.. +O.226w.. +O.908wrjJ =0O (8)Ahora se pueden resolver simultáneamente las ecuaciones (5) a (8), para las cuatroincógnitas. Elresultado es
0)3 = l.72i + 13.6} + 3.7ok rad/s Resp.0)4 -25.51 rad/s Resp.Sustituyendo en la (3), se obtieneV B 16.8j 13.1k pie/s Resp.Pasando a continuación al análisis de aceleración, se calculan las siguientes componentes:AA....oA, =a6)23)()( r(6)=3 0)( rJ) = 0)3 X V BA(9)(lO)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 378/508
394 TEORíA DE MÁQUINAS Y MECANISMOS k133..0770 I A..A =a3 xr3I i j kI 1- .I Y Z12 a10J 2a.7l1 10a.8l 9-2151 58)-234k
= +(0.( 900.282a6;0: -3 -0.202.863a3n0:l;+ )k ( 0.8330:] -0.9080:))1-;0.. 16.8 B.I7...8 9 \ -0.658a.1+0.514a""Estas cantidades se sustituyen en la ecuación de diferencia de aceleración(11)(12)(l3)(14)(15)y, junto con la condición al f3 O para el giro de la libertad no esencial, los resultado se puedenobtener exactamente igual que antes:
a, -5691 + 623j + 368k rad/s2 Resp.a. = -9371 rad/52 Ans.AB = AlIo. + A..o, 304j 88lk pie/s Resp.La determinación de las velocidades y las aceleraciones de un mecanismo espacialpor medios gráficos, se conduce en la misma forma que para un mecanismode movimiento plano. Sin embargo, los vectores velocidad y aceleración queaparecen en las vistas estándar de frente, superior y de perfil, por lo general nosecontemplan en su longitud verdadera, es decir, se escorzan. Esto significa que el últimopaso de la construcción del polígono vectorial se debe completar en una vistaauxiliar en la que el vector incógnita aparezca en su longitud verdadera.Las direcciones de los vectores dependen de las direcciones de los elementos
del mecanismo; por esta razón, es necesario proyectar también uno de los eslabonesdel mecanismo en la vista o vistas auxiliares. Asimismo, por esta razón, sedecide conectar los polos de los polígonos vectoriales a un punto sobre uno de los eslabones, de tal modo que la relación entre los vectores y uno de los eslabones seaevidente en todas las vistas.Una vez que se obtienen el vector o vectores desconocidos en las vistasauxiliares, se pueden proyectar de regreso al sistema ortogonal estándar de tres vistasy se miden directamente las longitudes de las proyecciones x, y y z. El procedimiento
quedará mejor ilustrado con un ejemplo.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 379/508
MECANISMOS ESPACIALES 395I!demplo 11-2 Constrúyanse los pollgonos de velocidades y aceleraciones para la solución gráficadel ejemplo 11-1.SOLUCIÓN La solución de las velocidades aparece en la figura 11-9, y la notación corresponde a
la que se utiliza en muchos libros de geometría descriptiva. Las letras F, Ty P designan los planosfrontal, superior y de perfil, y los números 1 y 2 el primero y segundo planos auxiliares deproyección. Los puntos proyectados sobre estos planos llevan los subíndices F, T, P,etc. Lospasos para obtener la solución de velocidades son como siguen:1. Constrúyanse las vistas frontal, de perfil y superior del eslabonamiento y desígnese cadapunto.2. Calcúlese V A Y colóquese este vector en posición, con el origen en A sobre las tres vistas. La
velocidad de A se muestra en su longitud verdadera en la vista frontal. Desígneseel extremo deV A como aF, Y proyéctese hacia las vistas superior y de perfil.3. La velocidad de B es desconocida, pero no su dirección. La dirección es perpendicular aleslabón 4 y con el sentido en el que gira éste. Cuando el problema se resuelve, V lJse verá en sulongitud verdadera en la vista de perfil. Trácese una recta en la vista de perfilque correspondacon la dirección conocida de V B' Localícese cualquier punto dp de esta recta y proyéctese hacialas vistas frontal y superior.4. La ecuación que se debe resolver es
(16)en donde se conocen tanto V A como las direcciones de V 8 Y V BA. Nótese que V EAes perpendicularal eslabón 3; pero se desconoce su magnitud. En el espacio, las rectas perpendicularesal eslabón 3, se asemejan a los rayos de una rueda, y el eslabón 3 es el eje de rotación de esarueda. Por consiguiente, existe un número infinito de rectas perpendiculares al eslabón 3; perosólo se tiene interés en una de ellas. La recta que se necesita debe originarse en el extremo deV A Y terminar intersecándose con la recta Ad o su extensión. Para elegir esta recta
entre elnúmero infinito de aquéllas de que se dispone, es necesario examinar a AB en la dirección enla que aparece como un punto. Por consiguiente, en este paso, se debe proyectarAB sobre unplano que la muestre en su longitud verdadera; por tanto, constrúyase la vista lateral del planoI paralela a ATBT, y proyéctese AB sobre este plano. Al hacer esta proyección, nóteseque lasdistancias k y 1 en la vista frontal son las mismas en esta primera vista auxiliar. La vista auxiliarde AB es A,B, que es su longitud verdadera. Proyéctense también los puntos a y dhacia esta vista, pero no es necesario proyectar el resto de los eslabones.
5. En este paso, elíjase un segundo plano auxiliar 2, tal que la proyección de AB sobre él sea unpunto. Luego, todas las rectas trazadas paralelamente al plano serán perpendicular
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 380/508
es aleslabón 3. La vista lateral de un plano de esta índole es perpendicular a A,B"extendida. Eneste ejemplo es conveniente elegir este plano de modo que contenga al punto a; por tanto, constrúyasela vista lateral del plano 2 pasando por el punto a" perpendicular a A,B, extendida.
Ahora proyéctense los puntos A, B, a y d sobre este plano. Nótese que las distancias, porejemplo m, de los puntos respecto al plano 1, deben ser las mismas respecto al plano 2.6. Prolónguese la recta A,d, hasta que se interseque con la vista lateral del plano 2 en b" y encuéntresela proyección b, de este punto en el plano 2. Ahora, tanto a como b quedan en elplano 2; cualquier recta trazada en e l plano 2 es perpendicular al eslabón 3 . Por ende, la rectaab es V HA Y la vista de la misma en el segundo plano auxiliar es su longitud verdadera. La rectaAlB es la proyección de V H sobre el segundo plano auxiliar, pero no con su longit
ud verdaderaporque A no está en el plano 2.7. (Para simplificar la lectura del dibujo, se omitió ilustrar el paso 7; si se siguen con sumocuidado los seis primeros pasos no se tendrá ninguna dificultad con el séptimo.) Proyéctenselos tres vectores de regreso hacia las vistas frontal, superior y de perfil. Entonces se puedemedir V B a partir de su vista de perfil porque ahí aparece en su longitud verdadera. Cuando sehayan proyectado todos los vectores de regreso a estas tres vistas, las proyecciones de x, y y Zse pueden medir directamente.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 381/508
396 TEoRÍA DE MÁQUINAS Y MECANISMOSLa solución para el problema de las aceleraciones se obtiene en forma idéntica, utilizando losmismos dos planos auxiliares. La ecuación que se debe resolver es(17)en donde se conocen los vectores Al1, A:4. A.. Y Al1A o se pueden hallar una vez
que se completael poligono de velocidades. Asimismo, al comparar la ecuación (17) con la (16), esevidente que A .. Y A ..A tienen las mismas direcciones que V B Y V HA. respectivamente. En consecuencia, lasolución puede desarrollarse exactamente igual que para el polígono de velocidades.La únicadiferencia en el procedimiento es que hay más vectores conocidos.,, ,I I, II 11 ,4/ / / / / />../. B¡// x
'://·r:·····, ------------'--+-i -------- .......... ---... ..- ----- I,FPFigura 11-9 Ejemplo 1 1-2: análisis de velocidad.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 382/508
MECANISMOS ESPACIALES 39711-6 ÁNGULOS EULERlANOSEn la sección 3-2 se explicó que la velocidad angular es una cantidad vectorial: dedonde, al igual que todos los vectores, se puede resolver en sus componentes rectangulares(a)
Por desgracia, también se vio en la figura 3-2 que los desplazamientos angularestridimensionales no se comportan como vectores. Por consiguiente, no es factible encontrar un conjunto de tres ángulos que especifiquen la orientación de un cuerporígido y que tengan también como sus derivadas respecto al tiempo a ú/, wY, y wZ Para aclarar más aún el problema, se concibe un cuerpo rígido que gira en elespacio en torno a un punto fijo O en el origen de un sistema de referencia absolutoxyz. Entonces se define un sistema de referencia móvil x'y'z', de tal modoque esté fijo al cuerpo que gira. Los ejes del sistema x'y'z' se denominan ejes fijosal cuerpo. Se podría definir la orientación de x'y'z' empleando los cosenos director
es;pero se requerirían nueve de ellos y estarían relacionados por medio de seisrelaciones de ortogonalidad.Se pueden usar tres ángulos, llamados ángulos eulerianos, para especificar laorientación de los ejes fijos al cuerpo. Para ilustrar los ángulos eulerianos, se principiahaciendo coincidir los ejes fijos al cuerpo con los ejes de referencia absolutos.Entonces se especifican tres rotaciones sucesivas, que deben ocurrir en el orden especificado, para llegar a la orientación x'y'z' . t Una descripción pictórica tridimensionalde esas rotaciones es muy poco satisfactoria; como consecuencia, se
utilizarán las tres vistas ortográficas de la figura 11-10. Esas vistas están dispuestasde tal modo que los ejes se encuentran en el plano del papel o están dirigidaspositivamente hacia afuera del mismo.La primera rotación es describiendo el ángulo 4>, alrededor del eje z Y en ladirección positiva, como se ilustra en la vista a. Esta rotación proporciona el sistemaXly¡ZI Por tanto, x gira describiendo 4> hasta X¡, y hasta YI y Z y ZI coinciden.Se concibe un vector velocidad angular cf, coincidente con z y Z¡.El siguiente paso consiste en construir la vista b, realizando una proyecciórtortográfica a lo largo del eje YI positivo. La segunda rotación se realiza describiendo
el ángulo () en torno al eje YI y en la dirección positiva, como se muestra. Estarotación da lugar al sistema X2Y2Z2, en donde ZI gira describiendo el ángulo (J hastaZ2, Y XI hasta X2. Nótese que .VI y yz son coincidentes y que se puede concebirotro vector velocidad angular ti dirigido a lo largo del eje positivo Y2. Nótese tambiénque el vector cP se ha resuelto en sus componentes a lo largo de los ejes X2 Y Z2 .t Los autores no se han puesto completamente de acuerdo en cómo se deben definir estos ángulos.Aquí se empleará la definición dada por H. Yeh y J. 1. Abrams, Principies 01 Mechanics01 Solids andFluids, vol. 1, McGraw-Hill, New York, 1960, pp. 131-133, y por J. L. Synge y B.
A. Griffith, Principies01 Mechanics, 3a oo., McGraw-HilI, New York, 1959, pp. 259-261. En otros librosde referencia

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 383/508
se encontrará una gran variedad de otras definiciones, que difieren en los ejes entorno a los cuales semiden las rotaciones sucesivas.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 384/508
398 TEORÍA DE MÁQUINAS Y MECANISMOS.;o...e ..."3 ...'"
o"3 Oile-ti!'"..satUe...e¡;::...
"O...=>o-'"...0$ ...<tiro .. 1i):> i'J eo...o...'" Q)
.!!: :
..."OB¡;::-ti!...2 ...o'" 0$;.;1;;: ;<::>...
.,...
...os..=l:>Il¡¡:;El último paso se comienza proyectando ortográficamente a lo largo del ejepositivo Z2 de la vista b para obtener la vista c. Esto hace que el vector é aparezcasobre el eje positivo Y2 y que el eje Z2 quede dirigido positivamente hacia afuera de
la figura. La tercera rotación se hace describiendo el ángulo 1/1 en torno al eje Z2.Esto da lugar a la orientación deseada y a los ejes x'y'z'. Entonces se resuelven

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 385/508
las

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 386/508
MECANISMOS ESPACIALES 399velocidades angulares una vez más en sus componentes a lo largo de los ejes X/y' Z'.Si se utilizan las vistas b y e, los componentes se pueden sumar para darw x' == Ó sen r/J <Í> sen () cos r/Jw
wy'z' (j cos 1/1 + <Í> sen () sen r/JJ¡ + <Í> cos ()11-7 UN TEOREMA SOBRE VELOCIDADES Y ACELERACIONESANGULARES(11-5)(11-6)(11-7)En la figura 11-11 se tiene un dibujo esquemático del mecanismo espacial de sieteeslabones y siete revolutas. Las orientaciones de los siete ejes de los pares derevoluta
están representados esquemáticamente por medio de los vectores unitariosde velocidad aparente b>¡¡, que están dirigidos a lo largo de los ejes de los pares. Sesupone que no hay relaciones geométricas especiales y que, por ende, el eslabonamientotiene una movilidad de 1.Para desarrollar el teorema acerca de las velocidades angulares, se observa que(a)que es la ecuación de velocidad angular aparente (3-11). t Conviene volver a escribirla ecuación (a) como(b)t Para encontrar una demostración rigurosa, véase la obra de L. A. Pars, A Treatise
on Analytical Dy·namics, Heinemann, London, 1965, p, 102.Figura 11-11
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 387/508
400 TEORÍA DE MÁQUINAS Y MECANISMOSFigura 11-12y luego, procediendo de manera similar alrededor del circuito, se tieneÚ)31 Ú)41 + Ú)43 = O (c)Ú)41 Ú)51 + Ú)54 == O (d)Ú)SI -W61 + W65 O (e)
W61 - ""1 + ""6 = O (f) ""1- WlI +WI7 = O (g)Si se observa que WII = O, por definición, y se suman las ecuaciones (b) a (g), se obtiene(h)la cual afirma que la suma de las velocidades angulares relativas alrededor de uncircuito cerrado en un sistema de un solo grado de libertad, es cero. Expresadomatemáticamente, este teorema se escribe..W- 1-=0 "'- ¡+.1 n + l = 1 (11-8)i"",}Este teorema de la velocidad angular relativa es particularmente útil para
eslabonamientos espaciales que tienen pares con dos y tres libertades; véase porejemplo el problema 11-15. Sin embargo, debe tenerse especial cuidado de eliminartoda libertad no esencial antes de aplicar la (11-8).En la figura 11-12 se ilustra el método para el eslabonamiento RGGR. Obsérveseque el diagrama muestra los ejes múltiples de rotación de las articulacionesglobulares como libertades separadas y que se eliminó la libertad no esencial. Las direcciones de W32, W43> y W54, correspondientes a los ejes de rotación del primer par globular, no necesariamente deben ser ortogonales; de hecho, se pueden asignarcualesquiera direcciones convenientes, siempre y cuando sean independientes.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 388/508
MECANISMOS ESPACIALES 401yFigura 11-13 Articulación o junta universal de Rooke, o Cardan.El teorema de la aceleración angular relativa se puede desarrollar de la mismamanera. Este teorema se escribePuesto que
n.. a;+I.; = O ;=1n + l = 1d( A)A :dt ww =aw+ww(11-9)la dirección de a no es necesariamente la misma que la de w. Por consiguiente,debe tenerse cuidado al aplicar la ecuación (11-9).11-8 ARTICULACIÓN UNIVERSAL DE HOOKEEn la figura 11-13 se ilustra la conocida articulación o unión de Hooke, o Cardan.
Esta se compone de dos yugos, que son los elementos impulsor e impulsado, y unacruz, que es el eslabón de conexión. Una de las desventajas de esta articulación esque la razón de velocidades no es constante durante la rotación. En la figura 11-14se presenta un diagrama polar de velocidades angulares que muestra la velocidadangular tanto del impulsor como del elemento impulsado para una revolucióncompleta de la articulación. Puesto que se supone que el elemento impulsor tieneuna velocidad angular constante, su diagrama polar es un círculo. No obstante, eldiagrama para el elemento impulsado es una elipse que cruza al círculo en cuatrositios. Esto significa que hay cuatro instantes durante una sola rotación en los quelas velocidades angulares de los dos ejes son iguales. Durante el tiempo restante, el

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 389/508
402 TE ORlA DE MÁQUINAS Y MECANISMOS40·/' 50·lO·w2(impulsor)Figura 11-14
eje impulsado gira más rápido durante parte del tiempo y con mayor lentitud enotro lapso.Se puede considerar al eje impulsor de un automóvil como si tuviera una cargade inercia en cada extremo -el volante y el motor que giran a velocidad constanteen uno de los extremos y, en el otro, el peso del automóvil que se desplaza a gran velocidad-o Si en un automóvil se empleara una sola articulación universal quetrabajara formando un ángulo finito, la velocidad del motor, O bien, la del automóviltendrian que variar durante cada revolución del eje impulsor. Ambas inerciasse oponen a esto, de modo que el efecto sería que las llantas resbalarían y las
piezas que componen la línea de transmisión de potencia estarían sometidas agrandes esfuerzos. En la figura 11-15 se presentan dos configuraciones de articulacionesuniversales que ofrecen una razón uniforme de velocidades entre los extremosde entrada y de salida...*"-t ______ --1..{imp"""'OIw(impulsado) Figura 11-15

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 390/508
MECANISMOS ESPACIALES 4032Figura 11·16Análisis En la figura 11-16, el eje impulsor 2 se conecta con el eje impulsado 4 pormedio de la cruz de conexión 3. Las líneas de los centros de los ejes se intersecan
en O, produciendo el ángulo entre los ejes (3. Los extremos de la cruceta se conectanal yugo impulsor en los puntos A y B, Y al yugo impulsado en e y D. Duranteel movimiento, la recta AB describe un círculo en un plano vertical perpendicularal dibujo, y la recta eD, otro círculo en un plano que forma un ángulo {3 conel plano vertical. Estos dos círculos son círculos máximos de la misma esfera, cuyocentro es O. Los puntos A y e permanecen siempre con la misma separación, esdecir, a 90° de arco del círculo máximo. La desviación máxima en la razón develocidades angulares ocurre cuando cualquiera de los puntos A o e se encuentran en la intersección de los círculos máximos.En la figura 11-17 se ilustran nuevamente los dos círculos máximos en los
que A y e se desplazan. Estos círculos se intersecan en D y se muestran separadospor el ángulo entre los ejes {l Supóngase que el punto A recorre una distancia fJ apartir del punto de intersección. Entonces el punto e quedará localizado sobre elarco de círculo máximo A e, 90° detrás de A. A continuación localícese C' 90° ,adelante de e, sobre el círculo máximo que recorre C. Los triángulosA C' D yAC' Cson triángulos esféricos. Los dos arcos AC y CC son de 90° y, por ende, losdos ángulos C'AC t Los lados y ángulos de un triángulo esférico pueden tener cualquier valor desde O hasta 3600 Si unao más de las partes es mayor que 1800 entonces recibe el nombre de triángulo esférico general. Untriángulo en el que cada parte es menor que 1800 se conoce como triángulo esférico. Eltriángulo rectánguloesférico se define como aquél que tiene un ángulo recto. Las otras partes pueden posee
r cualquiervalor de O a 1800

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 391/508
404 TEORíA DE MÁQUINAS Y MECANISMOSFigura 11-17triángulo esférico rectángulo AC'D en el que el ángulo Ae'D es un ángulo recto,e' DA es el ángulo entre los ejes {J, el arco AD es el ángulo que describe el ejeal girar y el arco e' D, designado como q" es el arco que describe el eje impulsado al
girar. Según la fórmula del triángulo rectángulo tomada de la trigonometría esférica.cos {J tan q, cot e (11-10)Para obtener la relación entre las velocidades angulares, la ecuación se reordenácomoAl derivar se obtienetgn q, cos {J tan e (a)(b)Puesto que q, = W4, la velocidad angular del impulsado, y Ó = W2, la velocidad angulardel impulsor, la razón entre ambas essec2 8 _ cos {J sec2 ()--'--.--- - 1 + tan2 q, (e)
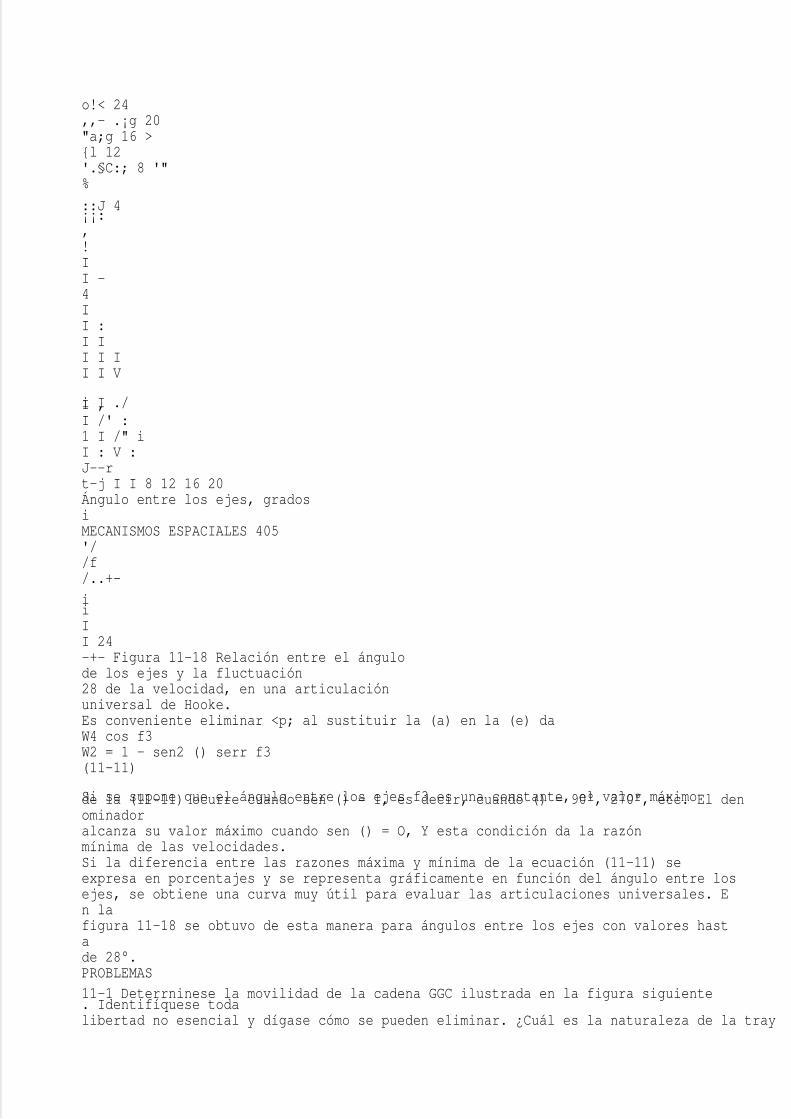
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 392/508
o!< 24,,- .¡g 20"a;g 16 >{l 12'.§C:; 8 '"%
::J 4¡¡:,!II -4II :I II I II I V
i I ./I ,I /' :1 I /" iI : V :J--rt-j I I 8 12 16 20Ángulo entre los ejes, gradosiMECANISMOS ESPACIALES 405'//f/..+-
iiII 24-+- Figura 11-18 Relación entre el ángulode los ejes y la fluctuación28 de la velocidad, en una articulaciónuniversal de Hooke.Es conveniente eliminar <p; al sustituir la (a) en la (e) daW4 cos f3W2 = 1 - sen2 () serr f3(11-11)
Si se supone que el ángulo entre los ejes f3 es una constante, el valor máximode la (11-11) ocurre cuando sen () = 1, es decir, cuando () = 90°, 270°, etc. El denominadoralcanza su valor máximo cuando sen () = O, Y esta condición da la razónmínima de las velocidades.Si la diferencia entre las razones máxima y mínima de la ecuación (11-11) seexpresa en porcentajes y se representa gráficamente en función del ángulo entre losejes, se obtiene una curva muy útil para evaluar las articulaciones universales. En lafigura 11-18 se obtuvo de esta manera para ángulos entre los ejes con valores hastade 28°.PROBLEMAS
11-1 Deterrninese la movilidad de la cadena GGC ilustrada en la figura siguiente. Identifíquese todalibertad no esencial y dígase cómo se pueden eliminar. ¿Cuál es la naturaleza de la tray

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 393/508
ectoria descritapor el punto B?11-2 Con el eslabonamiento del problema 11-1, siendo RBA = Ro,o = 75 mm, RBo, =150 mm, y 82 = 30°,exprésese la posición de cada eslabón en forma vectorial.11-3 Utilizando V A = - 50j mm/s, encuéntrense las velocidades angulares de los eslabones 2 y 3, y la
velocidad del punto B del mecanismo correspondiente al problema 11-2. Aplíquese elanálisis vectorial.11-4 Resuélvanse los problemas 11-2 y 11-3 por medio de técnicas gráficas.11-5 El eslabonamiento esférico 4R ilustrado en la figura tiene las siguientes dimensiones: RAo;¡ = 3 pulg,Ro,o = 7 pulg, Ro..o = 2 pulg Y RBo.= 9 pulg. El eslabón 2 se muestra en el planoxz y el eslabón 4 en elplano xy. Para una mejor representación, la figura no está trazada a escala. Exprésesela posición deleslabón 3 en notación vectorial. Siendo (1)2 = -60k rad/s úsese álgebra vectorial para realizar unanálisis completo de velocidad y aceleración del eslabonamiento en la posición indicad
a.11-6 Resuélvase el problema 11-5 por medios gráficos.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 394/508
406 TEORÍA DE MÁQUINAS Y MECANISMOS/y /Problemas 11-1 Y 11-511-7 Determínese la razón del tiempo de avance al de retorno para el problema 11·5. ¿Cuáles el ángulo
total de oscilación del eslabón 4?11-8 Repítase el problema 11-5 excepto con 82 = 90°.11-9 El eslabonamiento esférico de cuatro barras ilustrado tiene R.<.D, = 75 mm, Rozo = 150 mm,Ro.o =225 mm, RB.<. '" 412 mm, y RBo. = 262 mm. La posición que se presenta corresponde a82 = 120°. Determínese si la manivela 2 tiene libertad de girar y describir una vuelta completa. De serasí, hállese el ángulo de oscilación del eslabón 4 y la razón del tiempo avance al de retoo.11-10 Con (d2 = 36k rad/s, aplíquese el análisis vectorial para hacer un análisis completo de velocidad y
aceleración del mecanismo del problema 11-9.yProblema 11-9
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 395/508
MECANISMOS ESPACIALES 40711-11 Resuélvase el problema 1 1-10 aplicando métodos gráficos.11-12 En la figura se muestran las vistas superior, frontal y auxiliar de un eslabonamiento espacial decorredera y manivela, con dos articulaciones esféricas. Las dimensiones son R,w =2 pulg y R8A = 6
pulg. En la construcción de muchos mecanismos se toman medidas para hacer variar el ángulo {J. Porconsiguiente, la carrera de la corredera 4 se puede ajustar desde cero, cuando {J = O, al doble de la longitudde la manivela, cuando {J = 90". En este ejemplo, {J 30·, 92 240° Y tu2 = 24 rad/s .Exprésenselos eslabones en forma vectorial y apUquese álgebra vectorial para efectuar un análisis completo develocidad del eslabonamiento.----...---- - ---- x11-13 Resuélvase el problema 1 1-12 por medios gráficos.11-14 Resuélvase el problema 1 1-12 con {J = 60".
Problema 11-1211-15 En esta figura se presentan las vistas frontal, superior y de perfil de uneslabonamiento RGRe demanivela y corredera oscilante. El eslabón 4, la corredera oscilante, va rígidamenteunida a una varillaredonda que gira y se desliza en los dos cojinetes. Las dimensiones son RAQ, 4 pulg y Re" 12 pulg.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 396/508
408 TEORÍA DE MÁQUINAS Y MECANISMOSy4- ·--+----x!OF IProblema 11-15
a) Apliquese el criterio de Kutzbach para encontrar la mobilidad del eslabonamiento.b) Con la manivela 2 como impulsor, hállese el recorrido angular y lineal totalesdel eslabón 4.c) Con (J2 40° , escribase la ecuación de cierre del circuito para el mecanismo y úsese álgebravectorial para resolverlo para todos los datos de posición desconocidos.11-16 Con W2 -481 rad/s para el problema 11-15, hállense V B, W3. Y W4'

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 397/508
CAPÍTULOIXlCEFUERZAS ESTÁTICASAhora ya se puede iniciar un estudio de la dinámica de las máquinas y los sistemas.Este estudio se simplifica principiando con la estática de dichos sistemas. En los
estudios que se hicieron sobre el análisis cinemático. la atención sólo se enfocó a lageometria de los movimientos y a las relaciones entre el desplazamiento y el tiempoSe pasó completamente por alto las fuerzas que producían el movimiento, o losmovimientos que resultarían de la aplicación de un sistema de fuerzas dado.La consideración de un problema en el diseño de una máquina, en el que sólointervengan la longitud y el tiempo, es una simplificación tremenda. Libera a lamente de la influencia complicadora de muchos otros factores que, al final, intervienenen el problema. y permite que se enfoque la atención en el problema fundamental,es decir, el de diseñar un mecanismo para obtener un movimiento deseado.Las unidades fundamentales en el análisis cinemático son longitud y tiempo y,
en el análisis dinámico, son longitud, tiempo y fuerza.Las fuerzas se transmiten hacia los elementos de las máquinas a través desuperficies pareadas; por ejemplo, de un engrane hacia un eje, o de un engrane,através de los dientes endentados, hacia otro engrane; de una biela, a través de uncojinete, hacia una palanca; de una banda en V hacia una polea; de una leva haciaun seguidor, o de un tambor de freno hacia la zapata del freno. Existe una diversidadde razones por las que es necesario conocer las magnitudes de estas fuerzas.La distribución de las mismas en las fronteras, o superficies de contacto, debe serrazonable, y su intensidad debe estar dentro de los límites de trabajo de los
materiales que componen las superficies. Por ejemplo, si la fuerza que opera sobreun cojinett: de manguito es demasiado grande, expulsará la película de aceite yhará que se establezca un contacto metal contra metal, sobrevenga un calentamiento y se produzca una falla rápida del cojinete. Si las fuerzas entre los dientes de losengranes son demasiado grandes, la película de aceite puede ser expulsada de entre ellos. Esto provocaría que el metal se descascare y astille, ruido, movimiento bruscoy la falla final. En el estudio de la dinámica que se va a desarrollar, el interés s
e
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 398/508
410 TEORíA DE MÁQUINAS Y MECANISMOScentrará principalmente en la detenninación de la magnitud, la dirección y lalocalización de las fuerzas; pero se dejará a un lado la determinación de las dimensionesde los elementos sobre los que actúan.xír
12-1INTRODUCCIONA continuación se definen algunos de los términos nuevos que se aplican en estafase del estudio.Fuerza Las primeras ideas referentes a las fuerzas surgieron en el hombre debidoasu deseo de empujar o levantar varios objetos o tirar de ellos. Así, pues, la fuerzaes la acción de un cuerpo que actúa sobre otro. El concepto intuitivo de fuerza incluyeideas como lugar de aplicación, dirección y magnitud, que se conocen comolas caracterfsticas de una fuerza.Materia Materia es cualquier material o sustancia; si está totalmente encerrada, s
edenomina cuerpo.Masa Newton definió la masa como la cantidad de materia de un cuerpo según lamiden su volumen y densidad. Esto no es una defmición muy satisfactoria porquedensidad es la masa de una unidad de volumen. Se puede excusar a Newton conjeturandoque tal vez no quiso dar a entender que se trataba de una definición. Noobstante, reconoció el hecho de que todos los cuerpos poseen cierta propiedadinherente que no es lo mismo que el peso. Por consiguiente, una roca lunar posee cierta cantidad constante de sustancia, incluso a pesar de que su peso en la lunasea diferente de su peso en la Tierra. Esta cantidad constante de sustancia, o c
antidadde materia, recibe el nombre de masa de la roca.Inercia Inercia es la propiedad de la masa que hace que se resista a cualquier esfuerzopor cambiar su movimiento.Peso Peso es la fuerza de gravedad que actúa sobre una masa. Conviene teneren cuenta la siguiente cita:La gran ventaja de las unidades SI es que se tiene una, y solo una, unidad paracada cantidadflsica: el metro para la longitud, el kilogramo para la masa, el newton para lafuerza, el segundopara el tiempo, etc. Para ser coherente con esta caracteristica única, se deduce q
ue una unidad opalabra dada no se debe emplear como nombre técnico aceptado para dos cantidades flsicas. Sinembargo, durante generaciones se ha usado el término "peso", tanto en campos técnicos comono técnicos, para designar tanto a la fuerza de gravedad que actúa sobre un cuerpo,como la masadel cuerpo mismo. La razón de ¡este uso doble del término "peso" para dos cantidades flsicast La determinación de las dimensiones de los elementos de máquinas es el tema de obras que generalmenteMechanicaJ lElenvgai neel etírtiunlgo D dee sdigisne, ño de máquinas o diseño mecánico. Vée la obra de Joseph E. Shigley, 3d. ed., McGraw-Hill, New York, 1977.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 399/508
FUERZAS ESTÁTICAS 411diferentes -fuerza y masa- se atribuye al uso dual de las libras en el sistema gravitacional actualordinario, en el que con frecuencia se usa peso para significar tanto fuerza como masa. *En esta obra siempre se usará el vocablo peso con el significado de fuerza gravita
cional.Partícula Una partícula es un cuerpo cuyas dimensiones son tan pequeñas que sepueden despreciar.Cuerpo rígido Todos los cuerpos son elásticos o plásticos y se deformarán si recibenla acción de fuerzas. Cuando la deformación de tales cuerpos es pequeña,con frecuencia se supondrá que son rígidos, es decir, incapaces de deformarse,para simplificar el análisis.Cuerpo deformable No se puede aplicar la suposición de cuerpo rígido cuando sedeben analizar los esfuerzos y deformaciones internos debidos a las fuerzasaplicadas. Por ende, se considera que el cuerpo es capaz de deformarse. Este tipode análisis se denomina a menudo análisis de los cuerpos elásticos, aplicando la
suposición adicional de que el cuerpo se mantiene elástico dentro de la gama defuerzas aplicadas.pLieay, de Newton Las tres leyes de Newton, como las expresa en su obra Princison:(Ley 1) Todo cuerpo persevera en su estado de reposo o de movimiento uniforme enuna recta,excepto hasta que es obligado a cambiar ese estado por las fuerzas aplicadas.(Ley 2 ) El cambio de movimiento es proporcional a la fuerza en movimiento aplicada, y selleva a cabo en la dirección de la recta en la que se aplica dicha fuerza.(Ley 3) La reacción siempre es igual y opuesta a la acción; esto equivale a decir que las accionesde dos cuerpos entre sí son siempre iguales y directamente opuestas.
Para los fines de nuestro estudio, conviene volver a expresar estas leyes de lasiguientemanera:Ley 1 Si todas las fuerzas que actúan sobre una partícula están balanceadas, dichapartícula se mantendrá en reposo, o bien, continuará moviéndose en una recta conuna velocidad uniforme.Ley 2 Si las fuerzas que actúan sobre una partícula no están balanceadas, experimentaráuna aceleración proporcional a la fuerza resultante y en la dirección de estaúltima.Ley:l Cuando dos partículas reaccionan, se produce un par de fuerzas interactuan-* Tomado de "S. 1., The WeightlMass Controversy", Mech. Eng., vol. 99, no. 9, p.40, September
1977, y vol. 10l, no. 3, p. 42, March 1979.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 400/508
412 TEORÍA DE MÁQUINAS Y MECANISMOStes; estas fuerzas tienen magnitudes iguales y sentidos opuestos, y actúan a lo largode la recta común a las dos partículas.12-2 SISTEMAS DE UNIDADESLas dos primeras leyes de Newton se pueden resumir mediante la ecuación
F mA (12-l)que se conoce con el nombre de ecuación del movimiento de las partículas. Enesta ecuación, A es la aceleración que experimenta una partícula de masa m cuandorecibe la acción de la fuerza F. Tanto F como A son cantidades vectoriales.Un uso importante de la ecuación ( 1 2-1) ocurre en la estandarización de lossistemas de unidades. Los siguientes símbolos se utilizarán para designar unidades:Fuerza, FMasa, MLongitud, LTiempo, TEstos símbolos deben representar cualquier unidad que pueda elegirse. Por consiguiente,
las elecciones posibles para L son pulgadas, kilómetros, millas, etc. Lossímbolos F, M, L Y T no son números; pero se pueden sustituir en la ( 12-1 ) como sil o fueran. Así, pues, el signo de igualdad implica que los símbolos que s e encuentranen uno de los miembros son equivalentes a los que están en el otro miembro.Entonces, al hacer la sustitución indicada daF MLT-2 (12-2)porque la aceleración A tiene unidades de longitud divididas entre el tiempo alcuadrado. La ecuación ( 12-2) expresa una equivalencia entre las cuatro unidades defuerza, masa, longitud y tiempo. La persona tiene la libertad de elegir las unidades
para tres de ellas y entonces, las que se utilicen para la cuarta dependen de las tresprimeras. Por esta razón, las tres primeras unidades elegidas se conocen comounidades básicas, en tanto que la cuarta se califica como unidad derivada.Cuando se eligen como unidades básicas la fuerza, la longitud y el tiempo, lamasa es la unidad derivada y el sistema que resulta se conoce como sistema gravitacionalde unidades.Cuando se eligen la masa, la longitud, y el tiempo como unidades básicas, l afuerza e s la unidad derivada y e l sistema resultante es u n sistema absoluto deunidades.
En los países de habla inglesa, el sistema común pie-libra-segundo (fps-footpound-second) y el sistema pulgada-libra-segundo (ips-inch-pound-second) son los

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 401/508
FUERZAS ESTÁTICAS 413dos sistemas gravitacionales estándares más usados por los ingenieros. t En el sistemafps la unidad de masa es(libra fuerza) (segundo )2pie
slug (12-3)Por consiguiente, la longitud, el tiempo y la fuerza son las tres unidades básicasdelsistema gravitacional fps.La unidad de tiempo del sistema fps es el segundo, que se abrevia s.La unidad de fuerza en el sistema fps es la libra, con mayor propiedad librafuerza. Rara vez se abreviará esta unidad como lbf; la abreviatura lb es permisible,ya que se estarán manejando únicamente sistemas gravitacionales de uso común enEstados Unidos. * En algunas ramas de la ingeniería conviene representar 1 000libras como una kilolibra y abreviarla kip (del inglés, kilopound). Muchos escritores
agregan la letra s a kip para formar el plural; pero para ser coherentes con lapráctica de utilizar sólo unidades en singular, esto no se hará aquí. Por consiguiente,se usan 1 kip Y 3 kip para designar, respectivamente, 1000 Y 3 000 lb.Por último, en la ecuación ( 1 2-3) se observa que la unidad derivada de masa enel sistema gravitacional fps es la lb· s2jpie, llamada slug; no existe abreviatura para el término slug.La unidad de masa en el sistema gravitacional ips esM = FT2 = (libra fuerza) (segundo)2lb . s 2/pulgpulgNótese que a esta unidad de masa no se le ha dado un nombre especial.(12-4)
El Sistema Internacional de Unidades (SI) es un sistema absoluto. Las unidadesbásicas son el metro, el kilogramo masa y el segundo. La unidad de fuerza esderivada y se denomina newton, para distinguirla del kilogramo que, como se indicó, es la unidad de masa. Las unidades del newton (N) son(kilogramo) (metro)= k . m/s2 = N(segundo) 2 g (12-5)El peso de un objeto es la fuerza que la gravedad ejerce sobre él. Si se designael peso como W y la aceleración debida a la gravedad como g, la (12-1) se convierteen
W mg (12-6)En el sistema fps, la gravedad estándar es g 32. 1740 pie/s2 En la mayor partet La mayoría de los ingenieros prefieren utilizar sistemas gravitacionales; esto ayuda a explicar partede la resistencia a utilizar unidades SI, ya el Sistema Internacional (SI) es unsistema absoluto.* La abreviatura lb usada para la palabra libra, proviene de Libra, el séptimo signo del zodiaco, quese representa con una balanza.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 402/508
414 TEORIA DE MÁQUINAS Y MECANISMOSde los casos, se redondean a 32.2. Por ende, el peso de una masa de 1 slug en el sistema fps esW = mg = (1 slug)(32. 2 pie /S2) 32.21bgn el sistema ips, la gravedad estándar es 386.088, o sea, aproximadamente
386 pulg/s2 Por tanto, en este sistema, una unidad de m asa pesaW = (lIb· s2/pulg )(386 pulg /s2) = 386 lbCon unidades SI, la gravedad estándar es 9.806 m /s2, o sea, aproximadamente9.80 m/s2 Así pues, e l peso de 1 kg masa esW = (l kg)(9.80 m/s2) = 9.80 NConviene r ecordar que una m anzana grande pesa aproximadamente 1 N.12-3 FUERZAS APLICADAS Y DE RESTRICCIÓNCuando varios cuerpos se conectan entre sí para formar un grupo o sistema, lasfuerzas de acción y reacción entre dos cualesquiera de los cuerpos que conectan sedenominan fuerzas de restricción. Estas obligan o restringen a los cuerpos a comportarse de un m odo espe cífico. Las fuerzas externas a este sistema de cuerpos se
llam an fuerzas aplicadas.Las fuerzas eléctricas, m agnéticas y gravitacionales son ejemplos de fuerzaque p ueden aplicarse sin contacto físico real. Una gran m ayoría, si no la m ayorparte, de las fuerzas de las que nos ocuparemos ocurren a través de un contactofísico o mecánico directo.Como se indicó antes, las características de una fuerza son su magnitud, sudirección y su punto de aplicación. La dirección de una fuerza incluye el conceptode recta a lo largo de la cual se dirige la fuerza, así como un sentido. Por ende,unafuerza está dirigida positiva o neg ativamente a lo largo de una línea de acción.En ocasiones, el punto de aplicación no es importante, por ejemplo, cuando seestá estudiando el equilibrio de un cuerpo r ígido. De donde, en la figura 12-1a noimporta si se representa el par de fuerzas F1F2, como si comprimieran al eslabón,
osi se dibujan como si sometieran al eslabón a una tensión, a condición de que e lúnico interés que se tenga sea el del equilibrio del m ismo. Por supuesto, s i se estáinteresado en los esfuerzos internos del eslabón, las fuerzas no se pueden intercambiar.La notación para los vectores fuerza es la m ostrada en la figura 12-1b. Se usannegritas par a los vectores fuerza y cursivas blancas para sus magnitudes. Por tanto,las com ponentes de un vector fuerza son (a)Nótese que las direcciones de las componentes en este libro de texto se indican por
medio de superíndices y no de subíndices.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 403/508
(a)zFUERZAS ESTÁTICAS 41511J--------------....-r / 11 I ! I I I I t-- A : FY: j : I II II I: I ;' f x
: / FZ I _______ j..(b)Figura 12-1. a) Los puntos de aplicación de F¡ y F2 a un cuerpo rígido pueden tener ono importancia.b) Componentes rectangulares de un vector fuerza,Dos fuerzas iguales y opuestas que actúan a lo largo de dos rectas paralelas nocoincidentes en un cuerpo, no se pueden combinar para obtener una sola fuerzaresultante. Dos fuerzas cualesquiera de esta índole que actúan en un cuerpo, constituyenun par. El brazo del par es la distancia perpendicular entre sus líneas de acción,y el plano del par es aquél que contiene a ambas lineas de acción.
El momento de un par es otro vector M dirigido normal al plano del par; elsentido de M se determina de acuerdo con la regla de la mano derecha para larotación. La m agnitud del m omento es el producto del brazo del par y la magnitud de una de las fuerzas. Por consiguiente, M hF ( 12-7)en donde h es el brazo del momento.yM RXFF(al z (blFigura 12-2. a) R es un vector de posición, pero F y F' son vectores fuerza; el vector libre M es elmomento del par formado por F y F', b) Par de fuerza constituido por F¡ y F2,
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 404/508
416 TEORÍA DE MÁQUINAS Y MECANISMOSComo se ilustra en la figura 12-20, el vector momento es el producto vectorialdel vector de posición relativa R y el vector fuerza F y, por tanto, se define mediantela ecuación-
M=RxF (12-8)Al examinar la figura 12-2b se pueden determinar algunas de las propiedadesinteresantes de los pares. Aqui FI y Fz son dos fuerzas iguales, opuestas y paralelas.Elíj ase cualquier punto sobre cada línea de acción y definanse estos puntospor medio de los vectores de posición Rl y Rz. Luego, el vector de posiciónrelativa, o vector de diferencia de posición, esR21 R2-RIEl momento del par es la suma de los momentos de cada fuerza y esM R1xF1+R2xFzPero FI -Fz, y, en consecuencia, la ecuaciÓn (b) se puede escribirM = (R2 R1) X F2 = R21 X Fz
La ecuación (e) demuestra que:(a)(b)(e )1. El valor del momento del par es independiente de la elección del centro en tornoal cual se tomen los momentos, debido a que el vector R21 es el mismo paratodas las posiciones del origen.2. Puesto que R1 y R2 definen cualquier conjunto de puntos sobre las lineas de acción,el vector RZI no se restringe a la perpendicularidad con F1 y F2 Este es unresultado muy importante del producto vectorial porque significa que el valordel momento es independiente de cómo se elija R21 Se puede obtener la magnitud
del momento como sigue: Resuélvase RZ1 en las dos componentes R..I yR..l paralela y perpendicular, respectivamente, a Fl. Entonces(d)Pero R..l es la distancia perpendicular entre las líneas de acción y R..l es paralelaa F2 Por ende, R..l x Fz O yM=R..1 xFzes el momento del par. Puesto que R..l = R21 sen O, en donde O es el ángulo entreR21 y F2, la magnitud del momento esM = (R21 sen 0)F2 (e)3. El vector momento M es independiente de cualquier origen o línea de aplicacióny , por consiguiente, es un vector libre.
4. Se pueden hacer girar las fuerzas de un par juntas dentro de su plano , manteniendoconstantes sus magnitudes y la distancia entre sus lineas de acción, obien, se pueden trasladar hacia cualquier plano paralelo sin cambiar la mag-

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 405/508
FUERZAS ESTÁTICAS 417nitud o el sentido del vector m om ento. Asimismo, dos pares son iguales sitienen los m ismos v ectores m om ento, sean cuales fueren las fuerzas o los brazosdel m om ento. Esto significa que lo que importa es el producto vectorial de los
dos y no sus v alores por separado.12-4 CON DI CIONE S PAR AE LE QUILIBRIOUn cuerpo rígido se encuentra en equilibrio estático si:1. La suma vectorial de todas las fuerzas que actúan sobre él es cero.2. La suma de los momentos de todas las fuerzas que actúan en torno a cualquiereje único es cero.Matemáticamente, estas dos proposiciones se expresan comoLM=O (12-9)Obsérvese cómo estas proposiciones son un resultado de la primera y tercera leyesde N ewton, sobreentendiéndose que un cuerpo constituye una colección de partículas.Muchos problemas tienen fuerzas que actúan en un solo plano. Cuando estosucede, conviene trabajar en el plano xy. En tal caso, las ecuaciones (12-9) se
pueden simplificar comoL px O LP=O L M=Oen donde la dirección z para el m om ento M queda implícita en el hecho de que lasfuerzas sólo existen en xy.12-5 DI AGRAMAS DE CUER PO LIBREEl término " cuerpo", como se usa aquí, puede ser un máquina completa, v ariaspiezas conectadas de una m áquina, una sola o una porción de una pieza. Undiagrama de cuerpo libre es un esquema o dibujo del cuerpo, aislado de la máquina, en el que las fuerzas y los m om entos se m uestran en acción. Por lo com ún,conviene incluir en el diagrama las m agnitudes y direcciones conocidas, así comocualquier otra información pertinente.El diagrama obtenido de esta m anera se clasifica como "libre" porque se ha
liberado la parte o porción del cuerpo del r esto de los elementos de la m áquina ysehan reemplazado sus efectos por fuerzas y m om entos. Si el diagrama de cuerpolibre es de una pieza completa de la m áquina, las fuerzas señaladas en él son lasfuerzas externas (fuerzas aplicadas) y los m om entos ejercidos por piezas adyacenteso conectadas. Si el diagrama es una porción de una pieza, las fuerzas y losm om entos que actúan sobre la porción cortada son las fuerzas internas y losm om entos ejercidos por la parte que se ha cortado.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 406/508
418 TEORÍA DE MÁQUINAS Y MECANISMOSLa construcción y presentación de diagramas de cuerpo libre trazados conclaridad representan el m eollo de la comunicación en la ingeniería. Esto es ciertoporque r epresentan una parte del proceso de reflexión, ya sea que se plasmen realmenteen el papel o na, y porque la construcción de tales diagramas es la única
m anera en la que los r esultados de la r eflexión se pueden comunicar a otros. Elestudiantedebe adquirir el hábito de hacer diagramas de c uerpo libre sin importarqué tan simple pueda parecerle el problema. Constituyen m edios para almacenarun pensamiento m ientras se concentra en el siguiente paso del problema. La construcciónde los diagram as acelera el proceso de r esolución de problemas y r educeenormemente la posibilidad de c om eter errores.Las ventajas de utilizar diagramas de cuerpo libre se puede r esumir comosigue:l. Facilitan la tarea de trasladar las palabras, pensamientos e ideas a m odelos
físicos.2. Contribuyen para q ue se vean con clar idad y comprendan todas las facetas de un problema.3. Ayudan a planear el planteamiento del problema.4. Permiten que las relaciones m atem áticas sean m ás fáciles de ver o encontr ar . 5. Su aplicación facilita el control del avance y ayuda a establecer suposicionessimplificadoras.6. Los métodos utilizados en la resolución se pueden conservar para consultasfuturas.7. Son ayudas para la m emoria y facilitan la explicación y presentación del trabajo a otros.
Al analizar las fuerzas en las máquinas, casi siempre será necesario separar lam áq uina en sus componentes individuales y construir diagramas de c uerpo libre enlos que se m uestren las fuerzas que ac túan sobre cada componente. Muchas de estaspiezas estarán conectadas entre sí por medio de pares cinemáticos. En consecuencia,se ha preparado la figur a 12-3 para mostr ar las fuerzas de r estricción entre loselementos de los pares inferiores, c uando se supone que las fuerzas de fricción soncero.En el caso de pares superiores, las fuerzas de restricción son siempre normales
a las superficies de contacto cuando se desprecia la fricción.La notación m ostrada en la figur a 12-3 se aplicará en el curso del resto de estelibro. Por ejemplo, F21 es la fuerza que el eslabón 2 ejerce sobre el 1; por tanto, FI2es la r eacción a esta fuerza, y es la fuerza del eslabón 1 que actúa sobre el eslabón 2.12-6 PROGR AMAS DE CÁLCU LOSi el lector tiene acceso a cualquier tipo de instalación de computación programable, debe crear los siguientes programas par a utilizarlos, sobre todo en varios

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 407/508
z X(a)z X(b)Z X(e)
z (d)~ :alz 4 2 X(e) 1Fx y FZ 12 12"Fr2FUERZAS ESTÁTICASIF..l M..l(!..J ..AF ,21FZ F;l 21¡F..1l .. M' ..21
.. FX./ MZ 21 21IFY MY (1)21 21...., 21Á..lFZ.. F..l 21419Figura 12-3. Todos los pares inferiores y sus fuerzas de restricción: a) par de revoluta o rotatorio;variable del par, e; b) par prismático, variable del par, z; e) par cilindrico, variables del par, z, e; d)par de tonúllo, variables del par z o e; e) par plano, variables del par x, z, e;
f) par globular, variablesdel par, e, <p, .p.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 408/508
420 TEORtA DE MÁQUINAS Y MECANISMOSde los siguientes capítulos. Puesto que estos problemas son breves, todos ellos se pueden formar como subrutinas y almacenarse en una sola tarjeta magnética ocualquier otro medio de almacenamiento. Los indicadores de programa 'O las transferencias
condicionales facilitan la introducción de las diversas subrutinas. Sesugiere que se incluyan los siguientes problemas:l. Dado R/..Jl; encuéntrese xi + y j.2. Dado xi + yj; encuéntrese R/-.!1..43.. Dado f); encuéntrese R = xi + jj,. en donde x y y son los cosenos directores.Dados F¡, F2, F3, en sus componentes x, y y z; encuéntrese 5. :¿ F. Dados e y e' enus componentes x, y y z; encuéntrese e x e'.Estos programas se deben plantear de tal manera que las componentes cero seintroduzcan automáticamente sin necesidad de que se tome una acción positiva.12-7 E LE ME NT OS DE DOS Y TRES FUERZASEl equilibrio o falta de equilibrio de un elemento de dos fuerzas aparece ilustrado
en las figuras 12-40 y b. Si se aplica la primera de las ecuaciones (12-9), da¿F FA+FB=O (a)Esto exige que F A Y F B tengan las magnitudes iguales y direcciones opuestas. Lasegunda de las ecuaciones (12-9), :E M = O, requiere que FA y FB tengan la misma línea de acción; de otra manera, los dos momentos no darían una suma cero.En la figura 12-4c y d se ilustra el equilibrio o falta de equilibrio de un elementode tres fuerzas. Supóngase que dos de las fuerzas, por ejemplo FA Y F B, se intersecanen algún punto O. Estas fuerzas se suman para formar el vector único FA + F B.Como que la línea de acción de esta suma pasa por el punto O, causa que su momento
respecto a O es cero. La aplicación de :E M = O a las tres fuerzas, muestra que el (a) (b) (e)Figura 12-4. a) Elemento de dos fuerzas que no está en equilibrio; b) elemento dedos fuerzas que estáen equilibrio si F 4 Y F B son iguales, opuestas y tienen la misma línea de acción;e) elemento de tres fuerzasque no está en equilibrio; ti) elemento de tres fuerzas que está en equilibrio si FA, FB Y Fe son coplanares,si sus líneas de acción se intersecan en un punto común O y si su suma vectorial es cero.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 409/508
FUERZAS ESTÁTICAS 421momento de Fe alrededor de O también debe ser cero. Por ende, las líneas de acciónde las tres fuerzas se intersecan en un punto común; es decir, las fuerzas sonconcurrentes. Esto explica por qué un elemento de tres fuerzas se puede resolversólo para dos magnitudes de las fuerzas, aunque se tengan tres ecuaciones: ya se ha
usado la ecuación de momentos para hallar las direcciones de las líneas de acción.El caso se presenta con mucha frecuencia, por ejemplo, en las vigas, en dondelas tres fuerzas son paralelas; éste es el caso limite, y el punto común de intersecciónde las tres líneas de acción queda en el infinito.La ecuación ¿ F = O para un elemento de tres fuerzas requiere que las mismassean coplanares y que su suma vectorial sea cero.Ejemplo 12-1 El eslabonamiento de cuatro barras de la figura l2-5a tiene la manivela 2 impulsadapor un momento de torsión de entrada M12; una carga externa P = 120/220· lb actúa en Qsobreel eslabón 4. Para la posición particular del eslabonamiento que se indica, encuéntren
se todas lasfuerzas en los eslabones y sus reacciones.SoLUCIÓN GRÁFICA1. Selecciónese una escala espacial S. La escala espacial correspondiente para lafigura 12-5 esaproximadamente S = 9 pulg/pulg. Eso significa que 1 pulg del dibujo representa9 pulg deleslabonamiento.2. Selecci6nese una escala para las fuerzas Sp. La escala para las fuerzas parala figura 12-5 esaproximadamente 80 lb/pulg. Por consiguiente, un vector de 1 pulg de largo representa unafuerza de 80 lb.
3. Trácese el mecanismo y la fuerza o fuerzas dadas a las escalas apropiadas, comose indica en lafigura l2-5a.4. Selecciónese un eslabón o varios eslabones en los que se pueda jniciar el análisisy constrúyaseel diagrama de cuerpo libre. En este ejemplo se principia con el eslabón 4, como se señala en lafigura 12-5b, porque se da P. Puesto que el eslabón 3 es un elemento de dos fuerzas, sólopuede soportar tensión o compresión. Por ende, la línea de acción de FM actúa a lo largo deleslabón 3. El eslabón 4 es un elemento de tres fuerzas. No se conoce la dirección ni l
a magnitudde la reacción del marco F14 Un método para determinar las fuerzas vectoriales desconocidasque actúan sobre el eslabón 4 consiste en aplicar las ecuaciones (12-9). Por consiguiente,en la figura 12-5b trácense y midanse los brazos de momento P y FM en torno a 04-Seencuentra que éstos son, respectivamente, 2.38 y 8 .63 pulg. Sumando los momentosde estasdos fuerzas en torno a O. da la magnitud de F34_ L Mo, = 2.38(120) + 8.63F.14 = OUna solución de FM = -33.1 lb, en donde el signo menos indica que el momento de F34 en
torno a 04 es en el mismo sentido del movimiento de las manecillas del reloj, como se indica.5. El eslabón 4 es un elemento de tres fuerzas y, por tanto, se puede hallar la di

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 410/508
rección de F14utilizando el punto de concurrencia. Cuando se prolongan las líneas de acción de P yF34 seintersecan en e, el punto de concurrencia, como se ilustra en la fIgUra 12-5c.6. El polígono de fuerzas, ilustrado en la figura 12-5d, es la solución gráfica de laecuaciónLF=P+F34+F14 O
Nótese que los pasos 4 y 5 no son necesarios. Se puede utilizar el polígono de fuerzas con el finde resolver para las incógnitas, empleando primero el paso 4, o bien, el 5.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 411/508
.. / \ \ \8.63' 01' .. -lZUID \ Q A.. \\/J.. 2.38'"" OV////,: °4°2 °4 F14(a' (b)
(d)Figura 12 .. 5. ..A 6 pulg, AB = 18 pulg, 04B = 12 pulg, 02 04 = 8 pulg, 04Q 5 pulg... N...;¡.. .. ->-tJ tl1 s::.. -z >-en>< s:: ?5.. -en s:: O(e) enA
° 2(n

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 412/508
FUERZAS ESTÁTICAS 4237. En la figura 12-5e se construyó el diagrama de cuerpo libre del eslabón 3, observando queF2) -F4) = F34 8. El diagrama de cuerpo libre del eslabón 2 se muestra en la figura12-5f. En este caso, se tieneF)2 ·-FDyF'2 -Fn. Cuando se mide el brazo de momento de F'2 alrededor de 01 se obtie
nen5.54 pulg; de donde,Mil -33.1(5.54) -183 lb . pulg Resp.en donde el signo negativo indica que el momento es en el mIsmo sentido del movimiento delas manecillas del reloj.9. En la ilustración no se incluye un diagrama de cuerpo libre del marco, eslabón 1.Si se trazara,se mostrarían una fuerza F2! = -F!2 en O2, una fuerza F4I -F!4 en O . y un momentoM2! =-M12 SOLUCION ANALincA Se hace primero un análisis de posición del eslabonamiento con el
finde determinar la ubicación angular de cada eslabón. En la figura 12-6a se muestran los resultados.Con referencia a la figura 12-6b, se principia por sumar momentos en torno a uneje que pasepor O . Por consiguiente,Los vectores en la (1) sonRo = 5/68.4° = 1.841 + 4.65jP = 120/220° = -91.91 -77.1jR¡¡ 12/68.4° 4.421 + 11.16jF34 F34/22.4° (0.9241 + 0.381j)F",(1)Al realizar la operación de producto vectorial. se encuentra que el primer término d
e (1) es Ro x P285.5k. El segundo término es Re x F'4 = -8.63F34k. Al sustituir estos términos en (1) ydespejar, se obtiene 1<34 = 33.1 lb; de manera queF34 = 33.1/22.4° = 30.61 + 12.61 lb Resp.La reacción del marco se encuentra entonces partiendo de la ecuación2: F = F34 + P+ F'4 = (3(}.61 + 12.6]) + (-91.91 -77 .1j) + F!4 = OLa solución daF!4 6I.3i + 64.51 89.0/46.5" lb Resp.A continuación, partiendo de la figura 12-6c, para el eslabón 2 se escribe(2)Puesto que RA 6.. = -4.24i + 4.24j Y Fn = -FJ4 -30.6i - 12.61. se encuentra RA x
F32183.2k lb·pulg.Por tantoM!2 = -183.2k lb . pulg Resp.En el ejemplo anterior se supuso que todas las fuerzas actúan en el mismoplano. Para el eslabón de conexión 3 se supuso también que la linea de acción de lasfuerzas y la línea de los centros del eslabón coincidían. Un diseñador de máquinas

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 413/508
424 TEORIA DE MAQUINA S y MECANISMOSA(a)Figura 12-63 3A....------- ---..-A A....--------- ---..-A
(b) 2Figura 12-7. a) Conexión balanceada. b) esta conexión produce un momento de giro sobre el pasador y sobre cada eslabón.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 414/508
FUERZAS ESTÁTICAS 425cuidadoso tomará a veces medidas extremas para acercarse a estas condiciones tanto como sea posible. Nótese que si las conexiones de pasador se disponen como seindican en la figura 12-7a. estas condiciones se obtienen teóricamente. Por otrolado, si la conexión es como la de la figura 12-7b, el pasador mismo, al igual que
cada eslabón, tendrán pares giratorios que actúan sobre ellos. Si las fuerzas no seencuentran en el mismo plano. existen pares cuyos momentos son proporcionales ala distancia entre los planos de las fuerzas.(alEAx(e)lb)Figura 12-8 Las dimensiones están e nmilímetros.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 415/508
426 TEORtA DE MÁQUINAS Y MECANISMOS12-8 E LE MENTO S DE CU ATRO FUER ZASEl caso más general de un sistema de fuerzas es aquél en el que éstas no son concurrentesni paralelas. Un sistema de esta índole se puede sustituir siempre por unasola fuerza resultante que actúa en un punto arbitrario y un par resultante. Un
cuerpo sobre el que actúa un sistema general de fuerzas de este tipo se encuentraenequilibrio sólo si tanto el par resultante como la fuerza resultante son cero. Laecuación (12-9) expresa estas condiciones en forma matemática.Ejemplo 12-2 En la figura 12-8« se ilustra una leva y un seguidor de movimiento alternativo. Elseguidor se mantiene en contacto con la leva por medio de un resorte Que empujahacia abajo ene, con una fuerza de resorte Fe 12 N para esta posición en particular. Asimismo, una carga externaFE = 35 N actúa en E sobre el seguidor, en la dirección señalada. Determínese la fuerzaen
el pasador del seguidor en A y las reacciones en el cojinete en B y D. Supóngase que no hay friccióny que el seguidor carece de pesoSOLUCIÚN En la figura l2-8b se tiene un diagrama de cuerpo libre del seguidor. Lasfuerzas Fey FE se conocen y en esta figura, se obtiene su suma FE + Fe gráficamente. El diagrama muestralas líneas de acción de las tres incógnitas F.4 F B Y F D- Por consiguiente, el problema se reduce auna fuerza conocida, la resultante FE + Fe y las tres fuerzas de magnitudes conocidas.En la figura l2-Be se muestra la resultante FE + Fe con su punto de aplicación enE. Esto es
permisible deslizando Fe a lo largo de su linea de acción. Si se conociera FD se podría sumar a FE + Fe para producir la resultante FE + Fe + Fv, que luego actuaría pasando por el punto p.Considén:se ahora la ecuación de momentos. Si se escribe :¿ Mq = O, es evidente Que sólosepuede satisfacer la ecuación si la resultante FE + Fe + F D tiene como su linea deacción a pq. AsíQue, 'ésta es la base para la soluciÓñ gráfica. Como se ilustra en el polígono de fuerzasde lafigura 12-8e, la resultante FE + Fe + F D Que actúa a lo largo de la línea pq se utiliza primero paraencontrar la fuerza F f). El poligono se completa encontrando F él Y F B , puesto
que se conocen suslíneas de acción.Nótese que este procedimiento define un concepto general, útil en el enfoque analíticotambién:cuando hay tres incógnitas, elíjase un punto como q en donde se crucen las líneas de acciónde dos de las fuerzas desconocidas, y escríbase la ecuación de momentos L Mq O. Estaecuacióntendrá una sola incógnita que, para este ejemplo, es F D Y se puede resolver directamente. Sóloentonces se debe escribir la:¿ F = O, puesto Que el problema se ha reducido ahoraa dos incógnitas.Una solución analítica para este problema da F4 51.8 N, FB = 32.8 N, y FD = 5.05 N,
redondeadosa tres cifras.12-9 AN ÁLI SIS DE FUER ZASE NE NGR ANE S

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 416/508
RE CTO S Y HE LICO IDALE StEn la figura 12-9a se muestra un piñón con centro en O2 que gira en el mismo sentido del movimiento de las manecillas del reloj, a nz rpm, y que impulsa unengrane con centro en 03, a n3 rpm. Las reacciones entre los dientes ocurren a lolargo de la línea de presión AB. En la figura 12-9b se presentan los diagramas de
t'Puesto que las normas para los engranes se basan por completo en las unidadesde uso común enEstados Unidos, rara vez se encontrarán unidades SI para los engranes en esta obra.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 417/508
FUERZAS ESTÁTICAS 427AFigura 12·9 (b)cuerpo libre del piñón y el engrane. La acción del piñón sobre el engrane se hareemplazado por la fuerza W que actúa en el punto de paso, en la dirección de lalínea de presión. Puesto que el engrane está sostenido por su eje, debe actuar una
fuerza F igual y opuesta, en la línea de los centros del eje. Un análisis similar delpiñón muestra que las mismas observaciones son válidas. En cada caso, las fuerzastienen la misma magnitud y dirección opuesta, son paralelas y se encuentran en elmismo plano. Por consiguiente, constituyen un par.Nótese que el diagrama de cuerpo libre del piñón tiene las fuerzas resueltas ensus componentes. En este caso se emplean los superíndices r y t para indicar lasdirecciones radial y tangencial con respecto al círculo de paso. Es más rápido usarlos mismos superíndices para las componentes de la fuerza F que ejerce el ejesobre el engrane. El momento del par Wt y Ft es el momento de torsión que sedebe aplicar para impulsar al juego de engranes. Cuando el radio de paso delpiñón se designa como '2, el momento de torsión es
( 1 2- 1 1)en donde T es el momento de torsión aplicado, positivo para la dirección opuesta ala del movimiento de las manecillas del reloj y Wt es la magnitud del vector fuerzaWt Se observará que la fuerza radial W' no tiene finalidad por lo que respecta ala transmisión de potencia . Por esta razón, Wt se denomina con frecuencia fuerzatransmitida.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 418/508
428 TEORíA DE MÁQUINAS Y MECANISMOSSi se dan los caballos de potencia y la velocidad del piñón, se puede obtener lafuerza tangencial Wt a partir de la ecuaciónW1 = (33 000)(12) hp21Tr2n2(12-:12)
en donde '2 es el radio de paso en pulgadas y n2 la velocidad en revoluciones porminuto. Así, pues, las siguientes relaciones son evidentes en la figura 12-9:W (12-13)en donde 4> es el ángulo de presión.En el manejo de las fuerzas sobre engranes helicoidales, conviene determinarla fuerza axial, trabajar con ella independientemente y tratar el resto de las componentesde las fuerzas de la misma manera que como se hace con los engranesrectos. En la figura 12-10 se tiene el dibujo de un engrane helicoidal en el queseeliminó la mitad de la cara para mostrar las fuerzas que actúan en el punto de
paso. Se supone que el engrane gira en el mismo sentido que el movimiento de las manecillas del reloj. Se ha suprimido el engrane impulsor y se ha reemplazado su efecto por las fuerzas señaladas que actúan sobre los dientes. La fuerza resultanteW se divide en las tres componentes Wa, W', W1, que son respectivamente las fuerzasaxial, radial y tangencial. La fuerza tangencial es la transmitida y la que esefectiva en la transmisión del momento de torsión. Cuando el ángulo de presióntransversal se designa como 4>1 y el ángulo de hélice como ¡fr, las siguientes relacionesresultan evidentes en la figura 12-10:W Wa+W'+W/
wa W1tanl/tW' W1 tan 4>,(12-14)(12-15)(12-16)También es oportuno utilizar la resultante de W' y W1 Esta fuerza se designarácomo W'" ; y se define mediante la ecuaciónW'" wr+W1 (12-17)Ejemplo 12-3 Un tren de engranes se compone de tres engranes helicoidales con los centros de losejes en línea. El impulsor es un engrane helicoidal de mano derecha que tiene un radio de paso de
2 pulg, un ángulo de presión transversal de 200 y un ángulo de hélice de 30°. Un engrane loco enel tren tiene los dientes cortados de mano izquierda y un radio de paso de 3 . 25 pulg. El engraneloco no transmite potencia a su eje. El engrane impulsado en el tren tiene los dientes cortados demano derecha y un radio de paso de 2 . 50 pulg. Si la fuerza transmitida es de 600 lb, determínenselas fuerzas en el eje que actúan sobre cada engrane.SOLUCIÓN En primer lugar, se considerarán sólo las componentes axiales, como se sugiriópreviamente. Para cada endentamiento la componente axial de reacción es, según la (12-15),W· W' tan ¡f¡ = 600 tan 30° = 347 lb
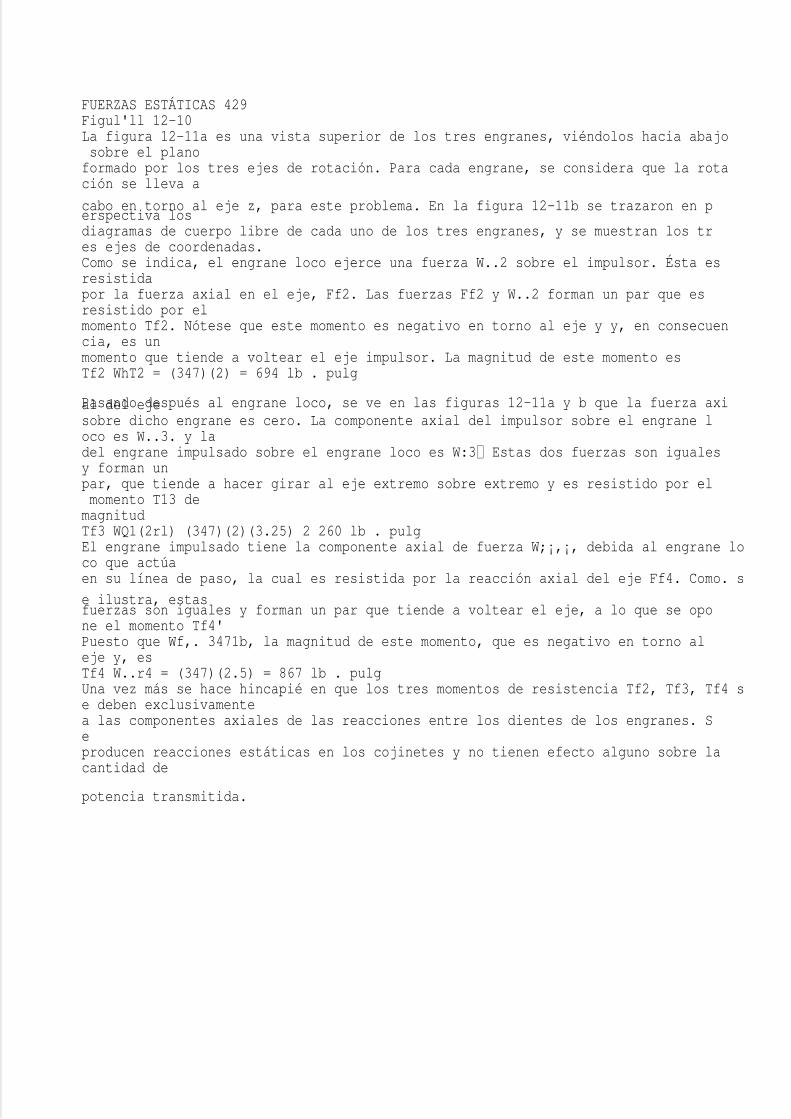
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 419/508
FUERZAS ESTÁTICAS 429Figul'll 12-10La figura 12-11a es una vista superior de los tres engranes, viéndolos hacia abajosobre el planoformado por los tres ejes de rotación. Para cada engrane, se considera que la rotación se lleva a
cabo en torno al eje z, para este problema. En la figura 12-11b se trazaron en perspectiva losdiagramas de cuerpo libre de cada uno de los tres engranes, y se muestran los tres ejes de coordenadas.Como se indica, el engrane loco ejerce una fuerza W..2 sobre el impulsor. Ésta esresistidapor la fuerza axial en el eje, Ff2. Las fuerzas Ff2 y W..2 forman un par que esresistido por elmomento Tf2. Nótese que este momento es negativo en torno al eje y y, en consecuencia, es unmomento que tiende a voltear el eje impulsor. La magnitud de este momento esTf2 WhT2 = (347)(2) = 694 lb . pulg
Pasando después al engrane loco, se ve en las figuras 12-11a y b que la fuerza axial del ejesobre dicho engrane es cero. La componente axial del impulsor sobre el engrane loco es W..3. y ladel engrane impulsado sobre el engrane loco es W:3 Estas dos fuerzas son igualesy forman unpar, que tiende a hacer girar al eje extremo sobre extremo y es resistido por elmomento T13 demagnitudTf3 WQ1(2rl) (347)(2)(3.25) 2 260 lb . pulgEl engrane impulsado tiene la componente axial de fuerza W;¡,¡, debida al engrane loco que actúaen su línea de paso, la cual es resistida por la reacción axial del eje Ff4. Como. s
e ilustra, estasfuerzas son iguales y forman un par que tiende a voltear el eje, a lo que se opone el momento Tf4'Puesto que Wf,. 3471b, la magnitud de este momento, que es negativo en torno aleje y, esTf4 W..r4 = (347)(2.5) = 867 lb . pulgUna vez más se hace hincapié en que los tres momentos de resistencia Tf2, Tf3, Tf4 se deben exclusivamentea las componentes axiales de las reacciones entre los dientes de los engranes. Seproducen reacciones estáticas en los cojinetes y no tienen efecto alguno sobre lacantidad de
potencia transmitida.
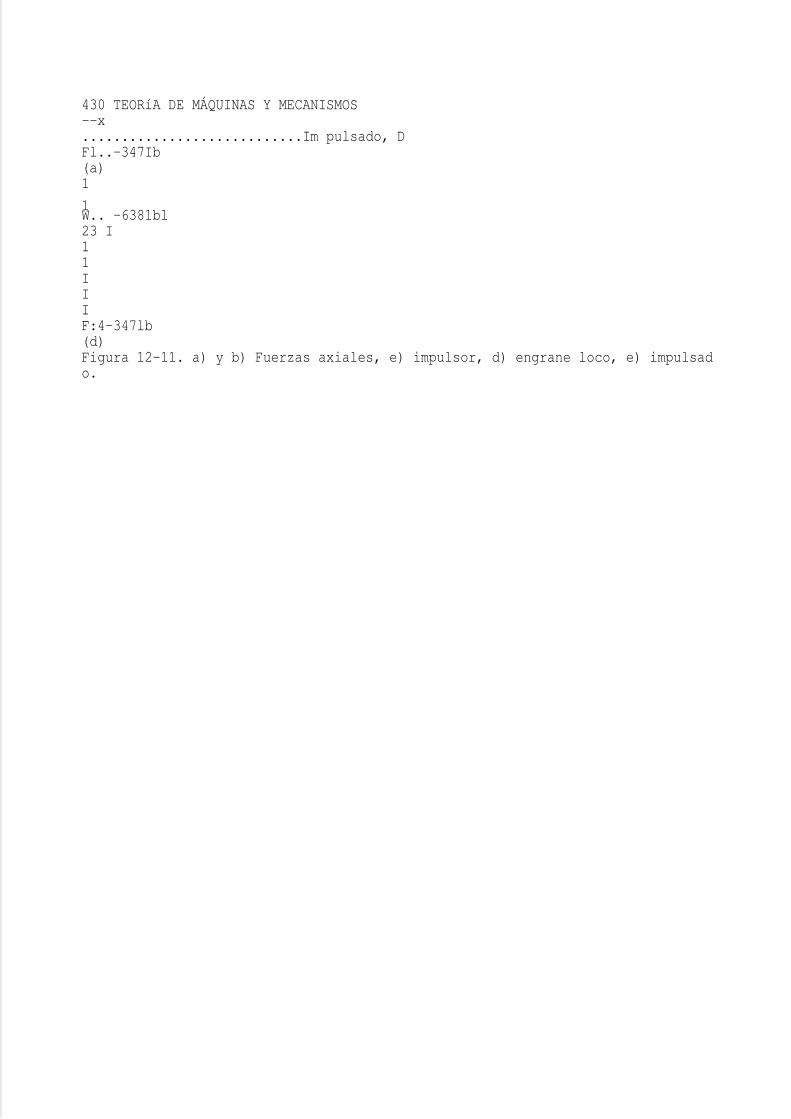
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 420/508
430 TEORíA DE MÁQUINAS Y MECANISMOS--x............................Im pulsado, DFl..-347Ib(a)1
1W.. -6381bl23 I11IIIF:4-347lb(d)Figura 12-11. a) y b) Fuerzas axiales, e) impulsor, d) engrane loco, e) impulsado.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 421/508
zFUERZAS ESTÁTICAS 431Ahora que se han hallado todas las reacciones debidas a las componentes axiales,la atenciónse centra en el resto de las componentes de las fuerzas y se examina su efecto como si operaran
independientemente de las fuerzas axiales.En las figuras 12-11e, d y e se dan los diagramas de cuerpo libre que muestran las fuerzas en elplano de rotación para los engranes impulsor, loco e impulsado, respectivamente. Se pueden obtenerlas fuerzas gráficamente como se indica, o aplicando las ecuaciones (12-11) y (12-12). No esnecesario combinar las componentes para encontrar las fuerzas resultantes porque, .:n el disefiode máquinas, las fuerzas componentes son exactamente las que se desean.Ejemplo 12-4 El tren de engranes planetario de la figura 12-12a tiene el eje a impulsado por un
momento de torsión de entrada de -IOOk lb·pulg. Nótese que el eje a está conectado directamenteal engrane 2 y que el brazo planetario 3 está conectado directamente al eje b y que estáseparado del eje a. pero con una holgura mínima. El engrane 6 está fijo en el marcoestacionario1 (que no se ilustra). Todos los engranes tienen un paso diametral de 10 dientespor pulgaday un ángulo de presión de 20°. Suponiendo que las fuerzas actúan en un solo plano y quesepueden despreciar las fuerzas centrifugas sobre los engranes planetarios, hágase un análisis com-340
(a)(e) Id)Figura 12-12

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 422/508
432 TEORÍA DE MÁQUINAS Y MECANISMOSpleto de fuerzas para las piezas del tren y calcúlese la magnitud y dirección del momento de torsiónde salida entregado por el ejeb.SOLUCIÓN Los diámetros de paso de los engranes son d2 = 20/10 = 2 pulg, d4 = 3 pulg,
ds = 1.6 pulg y dF = 3.4 pulg. Las distancias entre los centros de los engranesendentados es (Ns +N6)/2P = (16 + 34)/(2)(10) = 2.5 pulg. Puesto que el momento de torsión que ejerceel eje a contrael engrane 2 es Ta2 = 100 lb· pulg, la carga transmitida es W' = lOO/l = 100 lb. Por consiguiente,F42 = W'/(cos 4» = lOO/(cos 20°) = 106 lb. El diagrama de cuerpo libre del engrane 2semuestra en la figura 12-12b. En forma vectorial, los resultados sonFa2 = -F42 = l06..lbEn la figura 12-12b se ilustra también el diagrama de cuerpo libre del engrane 4.Las fuerzas
sonen donde F14 es la fuerza del eje sobre el brazo planetario 3 que actúa contra elengrane 4. Los engranes4 y 5 están conectados entre sí; pero giran libremente sobre el eje del brazo planetario. Porconsiguiente, TS4 es el momento de torsión ejercido por el engrane 5 sobre el engrane 4. Estemomento de torsión es TS4 = W'r4 = l00(..) = 150 lb· pulg.Considerando a continuación el diagrama de cuerpo libre del engrane 5 de la figura12-12c,primero se encuentra F ..s = T45/rs = 150/0.8 = 187.5 lb. De donde, F65 = 187.5/cos 20° = 200 lb.En forma vectorial, los resultados correspondientes al engrane 5 se resumen como
Para el engrane 6 de la figura 12-12c, se tieneFI6 = -F56 = 200Ll.6!llbTd6F.Jo k3.4(200Xcos ZOO)k 319k lb· pulg 16 = T S6 Cos o/ = 2Nótese que FI6 y TI6 son, respectivamente, la fuerza y el momento de torsión que ejerce el marcosobre el engrane 6.El diagrama de cuerpo libre del brazo 3 es el que aparece en la figura 12-12d. C
omo se indicóantes, se supone que las fuerzas actúan en un.solo plano; de donde, se pueden sumar las dos fuerzasF43 y F53 Y sonF53 = -F35 = 200.. lbLuego, la suma resulta serAhora se encuentra que la reacción del eje esFb3 = -F43 - FS3 = 137/-49 SO lbUtilizando r AO = 2.5j Y la ecuación L Mo = Tb3 + r,w x (F43 + FS3) = Ose encuentra Tb3 = -221klb· pulg. Por consiguiente, el momento de torsión del eje desalida esTb = +221k lb· pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 423/508
FUERZAS ESTÁTICAS 43312-10 ENGRANES CÓNICOS RECTOSAl determinar las fuerzas sobre los dientes en los engranes cónicos, se acostumbra utilizar las fuerzas que ocurrirían en el punto medio del diente sobre el cono depaso. La fuerza tangencial resultante ocurre probablemente en algún punto entre el
punto medio y el extremo grande del diente, pero sólo se tendrá un error pequefioal hacer esta suposición. La fuerza tangencial o transmitida está dada porTr (12-18)en donde r es el radio promedio del cono de paso, como se ilustra en la figura12-13, y T es el momento de torsión.En la figura 12-13 se muestran también todas las componentes de la fuerzaresultante que actúa en el punto medio del diente. Por observación de la figura sepueden obtener las siguientes relaciones:yFIgura 12-13
w = wa + w' + wtW' = Wt tan 4> cos 'YWa = W1 tan 4> sen 'Y(12-19)(12-20)(12-21)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 424/508
434 TEORíA DE MÁQUINAS Y MECANISMOSComo en el caso de los engranes helicoidales, obsérvese que la fuerza axial Waconduce a un par sobre el eje que tiende a voltearlo.Ejemplo 12-5 El piñón cónico que se ilustra en la figura 12-l4 gira a 600 rpm en la direcciónseñalada y transmite 5 hp al engrane. Se muestran las distancias de montaje, junto
con la ubicaciónde los cojinetes en cada eje. Los cojinetes A y e son capaces de admitir tanto cargas radialescomo axiales, en tanto que los cojinetes B y D están construidos para recibir sólo cargasradiales puras. Los dientes de los engranes tienen un ángulo de presión de 200 Encuéntrense lascomponentes de las fuerzas que ejercen los cojinetes sobre los ejes en las direcciones x, y y z.S OLUCION Los ángulos de paso para el piñón y el e ngrane sonLos radios h asta el p unto medio de los dientes se indican e n e l dibujo y sonr2 = 1 .293 pulg y
r3 = 3.88 pulg para el piñón y el engrane, respectivamente.En primer lugar determinemos las fuerzas que actúan sobre el piñón. La fuerza tangencial esW' = (33 000)(12) hp = (33 000)(12)(5) = 406 lb21Tr2n2 21T( 1.293)(600): /Cojinetei I 'DOFigura 12-14
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 425/508
FUERZAS ESTÁT[CAS 435Esta fuerza actúa en la dirección z negativa. (En la figura 1 2- 1 4 el eje z es positivo hacia afuera delpapel, para un sistema derecho.) Las componentes radial y axial se obtienen a partir de las ecuaciones( 12-20) y ( 1 2-21),
W ' = W ' t a n q, cos 'YW· = W' tan q, sen l'406 tan 20° cos 18.40 = 140 lb406 tan 200 sen 1 8.40 = 46.6 lbEn este caso, W' actúa en la dirección y positiva y W· lo hace en la de x positiva.Estas tres fuerzas son las componentes de la fuerza W. Por consiguiente,W 46.61 + 140J 406kEl momento de torsión aplicado al eje del piñón debe serT2 '" -406(1 .293)1 -5251 l b · pulgEn la figura 1 2- 1 5a se presenta esquemáticamente un diagrama de cuerpo libre del piñón y el eje.Se deben d eterminar las reacciones en los cojinetes FA y FII, las dimensiones,
el momento de torsiónT2, y la fuerza W son los elementos d ados del problema. Para encontrar F R, sesumarán los momentosen tomo a A. Esto requiere dos vectores de posición relativa, que se definen comoRpA = -2.621 1 .293jDespués de sumar los momentos en tomo a A da L MA = T2 + RIlA x FII + Rp4 x W OLos términos segundo y tercero para la ( 1 ) son, respectivamente,RBA x FII = 3i x (F¡¡l + Fj¡k) -3F..j + 3FlíkRpA x W = (-2.621 1.293) x (46.61 + 140j - 406k)= 5251 - l 064j 308kSustituyendo el valor de Tz Y las ecuaciones (2) y (3) en ( 1 ) , y resolviendo, laFB = 1 021 355k lb Resp.
La m agnitud de F B es 370 lb .A continuación, para determinar F " se escribeCuando W y F 11 se sustituyen en esta ecuación, se puede despejar FA. y el resultado esFA = -46.6i 2421 + 761 k lb Resp.( 1)(2)(3)(4)La magnitud es FA = 798 lb. Los resultados aparecen ilustrados en la figura 1 2-1 5b. Para el eje del engranese sigue un procedimiento similar. Los resultados se presentan en la figura 1 2-
1 5c.12-11 MO DE LO S DE LA FUER ZA DE FRI CCI ÓN *En años recientes se ha despertado un enorme interés por el tema de la fricción y eldesgaste, y se han dedicado m uchos artículos de investigación y libros de texto aeste tema. El propósito que nos ocupa aquí no es analizar con profundidad la'N. del R.T. También llamada de rozamiento.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 426/508
4J6 TEORlA. DE MÁQUINAS Y MECANISMOS(a) (b)140lb I F..=1l8Ib _ / ! e .." 3F..=275Ib(e) xI
Figura 12-15mecánica del tema en lo absoluto, sino presentar simplificaciones matemáticas muyconocidas que se pueden utilizar para analizar el comportamiento de las máquinas.Los resultados de este tipo de análisis no serán teóricamente exactos, pero correspondenmuy aproximadamente al comportamiento experimental, de modo que esfactible tomar decisiones seguras respecto a un diseño y sus características deoperación.Considérense dos cuerpos que se ven forzados a estar en contacto el uno conel otro, con o sin movimiento relativo entre ellos, como por ejemplo , el bloque3 y
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 427/508
FUERZAS ESTÁTICAS 437la superficie del eslabón 2 que aparecen en la figura 12-160. El eslabón 4 ejerce unafuerza F43 sobre el bloque 3, que tiende a obligarlo a deslizarse en relación conlaranura 2. Sin la presencia de la fricción dentro en la superficie entre los eslabo
nes 2y 3, el bloque se deslizaría en la dirección de la componente horizontal de F43 y el equilibrio no sería posible a menos que F43 fuera perpendicular a la ranura. Sinembargo, con fricción, se desarrolla una fuerza resistente Fh en la superficie decontacto, como se ilustra en los diagramas de cuerpo libre de la figura 12-16b .Esta fuerza de fricción Fh actúa además de la fuerza de restricción usual F..3 a travésde la superficie de la junta deslizante, y junto con las fuerzas F..3 y Fh forman unafuerza total F23 que se balancea con F43 para mantener al bloque en equilibrio.Por
supuesto, las fuerzas de reacción F32 y F..2, están actuando también simultáneamentesobre el eslabón 2, como se muestra en el otro diagrama de cuerpo libre dela figura 12-16b. La fuerza F..3 y su reacción F..2 se conocen como fuerzas defricción.Dependiendo de los materiales de los eslabones 2 y 3, existe un límite para lamagnitud de la fuerza Fh , que puede ser desarrollada por la fricción mientras semantiene todavía el equilibrio. Este límite está dado por la relación(a)(el(b) (d)Figura 12-16. Representación matemática de las fuerzas de fricción: a) sistema flsico;b) diagramas decuerpo libre; e) fricción estática y de Coulomb; d) fricción viscosa.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 428/508
438 TEORIA DE MÁQUINAS Y MECANISMOS( 1 2-22)en donde ¡.t, que se define como el coeficiente de fricción estática, es una propiedad característica de los materiales en contacto . Se han determinado experimentalmente
valores del coeficiente ¡.t para muchos materiales, y estos se pueden encontraren la mayor parte de los manuales de ingeniería. tSi la fuerza F43 se inclina demasiado, de tal manera que su componente horizontaly , por ende, Fh son demasiado grandes para satisfacer la ecuación( 1 2-22), el equilibrio no es posible y el bloque se deslizará en relación con el eslabón2, con una velocidad aparente V B312' Cuando se produce el deslizamiento, la fuerzade fricción toma el valor( 1 2-23)en donde ¡.te es el coeficiente de fricción de deslizamiento. La fricción de deslizami
entose denomina muy a menudo fricción de Coulomb, y ese término se utilizaráaquí con frecuencia. También se puede hallar experimentalmente el coeficiente¡.te y es un poco menor que JL para la mayor parte de los materiales.En la figura 1 2- 1 6c se presenta una gráfica de la fuerza de fricción Fh contrala velocidad aparente VBlI2 Aquí se puede ver que cuando la velocidad de deslizamientoes cero, la fuerza de fricción Fh puede tener cualquier magnitud entreJLF..3 y -JLF..3. Cuando la velocidad no es cero, la fuerza de fricción Fh desciendeligeramente en magnitud hasta el valor JLeF..3 , Y tiene una dirección que se opone almovimiento de deslizamiento, V B3/2'
Se se examina la fuerza total F23 en la figura 1 2-16b, se observa que está inclinadaformando un ángulo .. para ser igual y opuesta a F43, siempre que el sistemaesté en equilibrio. Cuando F43 está inclinada de tal modo que el bloque estájusto a PijIlto de deslizarse, el ángulo .. está dado poro bien, 02-24)En ángulo 4>, conocido como ángulo de fricción, define el ángulo máximo hasta elcual se puede inclinar F23 en relación con la normal a la superficie, antes de quesepierda el equilibrio y ocurra el deslizamiento . Nótese que 4> no depende de la magnitudde la fuerza F23, sino sólo del coeficiente de fricción para los materiales.
Aunque las fuerzas de resistencia en una máquina pueden ser predominantementefricción de Coulomb, a veces es más conveniente analizar el comportamientode la máquina empleando otra clase de fuerza resistente, llamada fricciónviscosa o amortiguamiento viscoso. La situación es prácticamente la misma por lot Véase, por ejemplo, D.B. Dalias (ed.), Tool and Manufacturing Engineers Handbook, 3d OO.,McGraw-HilI, New York, 1 976, pp. 41-12.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 429/508
FUERZAS ESTÁnCAS 439que respecta a los diagramas de cuerpo libre de la figura 12-16b. No obstante, en elcaso de fricción viscosa, se supone que la fuerza de fricción Fh está dada porFh = -CVay2 (12-25)en donde c es el coeficiente de amortiguamiento viscoso, llamado en ocasionesfac
torde amortiguamiento o constante de amortiguamiento viscoso. Como se ve en lagráfica de la figura 12-16d, esta fuerza de fricción tiene una relación lineal con lavelocidad. Esto es particularmente útil cuando e l análisis de la respuesta dinámicade una máqui na o un sistema conduce a una o más ecuaciones diferenciales. Larelación no lineal de la fricción de Coulomb, que se muestra en la figura 12-16c,lleva a una ecuación diferencial no lineal q ue es más difícil de manejar.Ya sea q ue el efecto de fricción provenga de una fricción viscosa, de Coulombo estática, es importante reconocer el sentido de la fuerza de fricción. Como recursonemoténico, la re gla se expresa a menudo como sigue: " la fuerza de fricciónse opone al m ovimiento" , com o lo muestra el diagrama de cuerpo libre del esla
bón3, figura 12-16b, en donde el sentido de Fh es opuesto al de V B3/2 Esta regla prácticano es errónea si se aplica con cuidado; pero puede ser peligrosa. Se observaráen la figura 1 2 - 1 6a V que hay dos movimientos que se podrían considerar, V B3/2 Y B2/3; se tienen también dos fuerzas de fricción F23 y F·h. Si se examina con cuidadola figura 12-16b, se verá que Fh se opone al sentido de V B3/2 , mientras que F..2seopone al sentido de V B2/3. En sistemas de máquinas, en donde, con frecuencia, los dos lados de una junta deslizante están en m ovimiento, es importante comprendercuál fuerza de fricción se opone a cuál movimiento.
12-12 ANÁLISIS DE FUERZAS ESTÁTICAS CON FRICCIÓNA continuación se mostrará el efecto de incluir la fricción en los métodos antes vistosde análisis de fuerzas estáticas, presentando un ejemplo.Ejemplo 12-6 Repítase el análisis de fuerzas estáticas del sistema de leva y seguidorque se analizóen el ejemplo 12-2 , figura 12-8, suponiendo que se tiene un coeficiente de fricción estática de 0. 15entre los eslabones 1 y 4, en los dos cojinetes de deslizamientos B y D. La fricción en todas lasdemás articulaciones se considera despreciable. Determínese la fuerza mínima necesariaen A paramantener el sistema en equilibrio. SOLUCIÓN Como siempre que se inicia un análisis d
e fuerzas con fricción, es necesario resolverprimero todo el problema sin fricción. El propósito es hallar la dirección de cada fuerza normal,en este caso FlI y Fl>. Esto se hizo en el ejemplo 12-2, en donde se encontró quetanto F8 comoFv actúan hacia la derecha en la figura 12-&.El siguiente paso en la solución es examinar con cuidado el enunciado del problemay determinarla dirección del movimiento inminente. Como se expresa, el problema pide la fuerzamínimaen A para mantener el equilibrio; es decir, si FA fuera de cualquier magnitud menor, el sistemase movería hacia abajo. Por consiguiente, el movimiento inminente es hacia abajo c
on lasvelocidades V V<l1 y V 8<11, por ende, las dos fuerzas de fricción en B y D debenactuar hacia arriba

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 430/508
sobre el eslabón 4. Nótese que si el enunciado del problema hubiera pedido la fuerzamáxima en

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 431/508
440 TEORlA DE MÁQUINAS Y MECANISMOSF B (b)(a) Figura 12-17. Ejemplo 1 2-6.A, el movimiento inminente del eslabón 4 sería hacia arriba y las fuerzas de fricción,hacia abajosobre el eslabón 4.
A continuación se vuelve a dibujar el diagrama <le cuerpo libre del eslabón 4, figura 1 2-Sc, yse incluyen las fuerzas de fricción, como se indica en la figura 1 2-170. En estecaso, debido a lafricción estática, las líneas de acción de F B Y F D se muestran inclinadas formando el ángulo <1>.que se puede calcular aplicando la (12-24)<1> = tan-I 0.15 = SS ( 1 )Al decidir l a dirección d e inclinación d e los ángulos <1> , fue necesario conocer tanto l a dirección delas fuerzas de fricción (hacia arriba) como la de las fuerzas normales (hacia la derecha) en B y D.
Esto explica por qué se debe realizar primero la resolución sin fricción.Ahora que se conocen las nuevas líneas de acción de las fuerzas F B Y F D, se puededesarrollarla solución exactamente como se hizo en el ejemplo 12-2. En la figura 12-17b se tiene la solucióngráfica con fricción, en donde se encuentra queResp. FB = 2S.7 N y FD = 6.57 NNótese que las componentes normales de las dos fuerzas en B y D son ahora F'B = 28.4 yp.. = 6.50, y son diferentes de los valores que se tienen sin fricción. Por ende,ya sea que se estéresolviendo un problema de fuerzas de fricción gráfica o analíticamente, es incorrectolimitarse a
multiplicar las fuerzas normales sin fricción por el coeficiente de fricción, para determinar lasfuerzas de fricción. Todas las fuerzas pueden cambiar en magnitud cuando se incluye la fricción,y el problema se debe resolver por completo desde el principio, incluyendo estenuevo factor. Elefecto de la fricción no se puede agregar por superposición en una etapa posterior.PROBLEMAs t12-1 En la figura se muestran cuatro mecanismos y las fuerzas o momentos de torsión externos ejercidossobre los mecanismos o por éstos. Hágase un esquema del diagrama de cuerpo libre decada pieza
de cada mecanismo, incluyendo el marco. No se intente mostrar las magnitudes delas fuerzas, exceptoen forma aproximada, pero trácense en las direcciones apropiadas.t A menos que se indique lo contrario, resuélvanse todos los problemas sin fricción.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 432/508
FUERZAS ESTÁncAS 441(a)(6)Ap F2
1 p F (d)Problema 12-112-2 ¿Qué momento MIZ se debe aplicar a la manivela del mecanismo de la figura, si PB 900 N?12-3 Si MI2 100 N · m para el mecanismo ilustrado, ¿qué fuerza PB es necesaria para mantener elequilibrio estático?12-4 (a) Encuéntrense las reacciones del marco y el momento de torsión MI2 necesarios para mantenerel equilibrio del eslabonamiento de cuatro barras que se ve en la figura.(b) ¿Qué momento de torsión se debe aplicar al eslabón 2 del mecanismo ilustrado con elfin de
mantener el equilibrio estático? Trácense diagramas completos de cuerpo libre de loseslabones 1 y 4.Problemas 12-2 Y 12-3 02A = 75 mm;AB = 350 mm.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 433/508
442 TEORÍA DE MÁQUINAS Y MECANISMOS(alProblema 12-4 a) y b) Ü¡A2 pulg.3.5 pulg; AB = O.BProblema 12-5 02A
020. = 60 mm.100 mm; AB(b)6 pulg; O.C = 4 pulg; O.D 7 pulg; 02 0.1 25 mm; O.C = 200 mm; CD = 400 mm;12-5 ¿Qué fuerza P es necesaria para el equilíbrio del eslabonamiento que se muestra?Hágase el esquemade un diagrama completo de cuerpo libre de cada eslabón.12-6 (a) Determínese el momento de torsión M12 que se requiere para impulsar la corredera 6 de la figura,contra una carga P 100 lb, para un ángulo de la manivela de (} = 30°, o según el que indique
el profesor.lb) ¿Qué momento de torsión M12 se debe aplicar al eslabón 2 del eslabonami!;nto de cuatro barrasilustrado para conservar el equilibrio estático? Háganse esquemas de los diagramas de cuerpo libre delos eslabones 1 y 3, Y hállense las fuerzas que actúan.12-7 E ncuéntrense la magnitud y la dirección del momento que se depe aplicar al eslabón 2 para impulsarel eslabonamiento contra las fuerzas indicadas. Hágase el esquema de un diagrama de cuerpo librede cada eslabón y muéstrense todas las fuerzas que actúan.12-8 En la figura se muestra un eslabonamiento de cuatro barras con las fuerzasexternas aplicadas en
los puntos B y C. Hállese el par qUe es preciso aplicar al eslabón 2 con el fin de mantener el equilibrio.Trácese un diagrama de cuerpo libre de cada eslabón, incluyendo el marco, y muéstrensetodas las fuerzasque actúan sobre cada uno de ellos.12-9 Trácese un diagrama de cuerpo libre de cada uno de los elementos del mecanismo que se ve en lafigura y encuéntrense la magnitud y dirección de todas las fuerzas y todos los momemos. Calcúlense lamagnitud y dirección del par que es preciso aplicar al eslabón 2 para conservar el equilibrio estático.12-10 Determínense la magnitud y dirección de las fuerzas que se deben aplicar al es
labón 2 para mantenerel equilibrio estático.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 434/508
FUERZAS ESTÁTICAS 44312-11 En cada caso ilustrado, el piñón 2 es el impulsor, el engrane 3 es loco, los engranes tienen pasosdiametrales de 6 y ángulos de presión de 20° . Para cada caso hágase el esquema de un diagrama decuerpo libre del engrane 3 y muéstrense todas las fuerzas que actúan.
10'I!a) El piñón 2 gira a 600 rpm y transmite 18 hp al juego de engranes. b) y e) El piñón 2gira a 900 rpm y transmite 25 hp al juego de engranes.(aI )AProblema 12-6 a) OlA = 2.5 pulg; 048 1 6 pulg; BC = 8 pulg. b) OlA 250 mm; AB 400 mm;AC = 0,04 700 mm; O. C 350 mm.Problema 12-7 02A 4 pulg; A B = 1 4 pulg; AC = 18 pulg; BC 8 pulg; O,D 7 pulg; O,C 10pulg; 0204 = 14 pulg.
12-12 Un piftón recto de 15 dientes tiene un paso diametral de 5 y un ángulo de presión de 20°, gira a 600 rpm e impulsa a un engrane de 60 dientes. Se transmiten 25 hp. Trácese un diagrama de cuerpolibre de cada engrane, mostrando en él las componentes tangencial y radial de lasfuerzas, así como susdirecciones apropiadas.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 435/508
444 TEORíA DE MÁQUINAS Y MECANISMOSPB=1201bA..--..--- -----.-(a)Problema 12 .. 11Problema }2.. 8 02A = 75 mm; AB = O.C =
200 mm; AC = 300 mm; BC = 150 mm; Oz04= 400 mm.Problema 12-9 02A = 4 pulg; AB = 14 pulg;AC 10 pulg; BC = 5 pulg; O.C = 020.8 pulg; CD = 4 pulg; O.D = 6 pulg.Problema }2.. 10 OlA 3 pulg; AB = 7pulg; AC = 14 pulg; BC = 8 pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 436/508
6P, 36 D4z(alProblema 12-16FUERZAS ESTÁTICAS 445
Problem 12-13j r1.28"24 D.., I )I I---,I I , I _.-I -J II -+----'- Tx 31 I .."2.5"18T, 6P -..2" _----Lz (b)12-13 El piñón de 16 dientes montado en el eje 2 gira a 1 720 rpm y transmite 5 hp al tren de engranes dedoble reducción. Todos los engranes tienen un ángulo de presión de 20°. En la figura se
dan las distanciasentre los centros de los cojinetes y los engranes para el eje 3. Encuéntrense la magnitud y direcciónde la fuerza radial que cada cojinete ejerce contra este eje. 12-14 Resuélvase elproblema 12-1 1 suponiendo que cada pifión tiene dientes helicoidales de manoderecha con un ángulo de hélice de 30° y un ángulo de presión normal de 20° . Por supuestotodos losengranes en el tren son helicoidales y el paso diametral normal es de 6 dientespor pulgada, en cadacaso.12-15 Analícese el eje de engrane del ejemplo 12-5 y calcúlense las reacciones en los cojinetes Fe Y FlJo12-16 En cada una de las transmisiones de engranes cónicos ilustradas en la figura
, el cojinete A soportatanto una carga de empuje como una carga radial, mientras que B sólo admite una componente radialpura. Calcúlense estas cargas sobre los cojinetes. Los dientes están cortados con unángulo de presiónde 20° .(a) T! = - 1 801 Ib · pulg. (b) T, = -240k lb · pulg.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 437/508
446 TEORÍA DE MÁQUINAS Y MECANISMOSI1" "87'l8 ' -- xProblema 12-1712-17 En la figura se muestra un tren de engranes compuesto de un par de engranes helícoidales y un
par de engranes cónicos rectos. El eje 4 es la salida del tren y entrega 6 hp a lacarga a una velocidad de370 rpm. Los engranes cónicos tienen un ángulo de presión de 20°. Si el cojinete E debesoportar tantouna carga de empuje como radial, mientras que el cojinete F sólo admite una cargaradial, determínesela fuerza que estos cojinetes ejercen contra el eje 4. 12-18 Con los datos del problema 1 2- 1 7, calcúlense las fuerzas ej ercidas por los cojinetes e y D sobreeleje 3. ¿Cuál de estos cojinetes debe absorber la carga de empuje si el eje se va a cargar en compresión?Los engranes helicoidales tienen un ángulo de presión transversal de 20° .
12-19 La fotografía muestra la nueva grúa flotante Figee que tiene una configuración de lemniscata enla pluma. También se muestra un diagrama esquemático de la grúa. La capacidad de levantamientoes de 1 6 t (l t = 1 tonelada métrica = I 000 kg) incluyendo el cucharón; el contenido de las tenazas esalrededor de 10 t . El alcance máximo es de 30 m que corresponde a 62 49". El alcance mínimo esde 10.5 m con O2 = 132°. En el pie de la figura se dan otras dimensiones. Para laposición de alcancemáximo y una carga en el cucharón de 10 t , calcúlense las reacciones en los cojinetesen A, B, O2 Y O.así como el momento M'2 requerido. Nótese que la fotografía muestra un contrapeso en e
l eslabón 2.Hágase caso omiso de este peso así como del peso de los elementos.Problema 12-19 (cont.)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 438/508
FUERZAS ESTÁTICAS 44712-20 Repítase el problema 1 2- 1 9 para la posición de alcance mínimo.12-21 Repítase el problema 1 2-6a suponiendo los coeficientes de fricción de Coulomb11-< = 0.20 entrelos eslabones 1 y 6, Y 11-, = 0. 10 entre los eslabones 3 y 4. Determínese el momento de torsiÓn M12
necesario para impulsar el sistema, incluyendo la fricción contra la carga P.12-22 Repítase el problema 1 2-10 suponiendo un coeficiente de fricción estática 11- =0.15 entre loseslabones 1 y 4. Determínese el momento de torsión Ml2 necesario para vencer la fricción.(al--I IProblema 12-19 a) Grúa flotante Figee con configuración de lemniscata en la pluma; b) diagrama esmático(véase la página 446). Las dimensiones en metros son Ü:!A 14.7, 04B 19.3, AB 6.5.AC 22.3, BC "" 16. (La fotografía y los detalles acerca de las dimensiones se publ
ican con autorizaciónde B. V. Machinefabriek Figee, Haarlem, Holanda. )

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 439/508
CAPÍTULOTRECEFUERZAS DINÁMICAS13-1 ANÁLISIS DE FUERZAS EN CUERPOS RÍGIDOS Y ELÁSTICOSCuando un badajo golpea una campana, ésta suena. Las características del tañido,tales como la frecuencia, la sonoridad, la duración y el tono dependen de la
geometría de la campana y el material con que se fabricó. Cuando se fabrican con unmaterial inelástico, como el plomo o la masilla, no sonarán; por consiguiente, lascampanas se hacen con materiales muy elásticos, como el vidrio o el acero duro. El análisis del tañido de una campana y otros sistemas vibrantes se conoce con elnombre de análisis de los cuerpos elásticos. Se aplica este análisis cuando se deseanconocer aspectos tales como la deflexión, deformación, extensión, o bien losmovimientos de diversas partículas del cuerpo.Por el contrario se emplea el análisis de los cuerpos rígidos cuando se tiene interésen el movimiento global de un cuerpo. Se supone que todo el cuerpo es absolutamenterígido e incapaz de deformarse de alguna manera. El estudio de este
capítulo se refiere únicamente al análisis de los cuerpos rígidos.13-2 CENTROIDES y CENTRO DE MASAAl resolver problemas de ingeniería, se encuentra con frecuencia que las fuerzas sedistribuyen de alguna manera sobre una linea, un área o un volumen. Por locomún, no es muy difícil encontrar la resultante de estas fuerzas distribuidas.Para tener el mismo efecto, esta resultante debe actuar en el centroide del sistema;de donde, el centroide de un sistema es un punto en el que se puede considerar queun sistema de fuerzas distribuidas está concentrado, con el mismo efecto exactamente.
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 440/508
y(alOm, r(b)FUERZAS DINÁMICAS 449Figura 13-1 a) Masas concentradas
sobre una recta, b) masas concentradasen un plano.En lugar de un sistema de fuerzas distribuidas, se puede tener una masa distribuida.En este caso, el término centro de masa se refiere al punto en el que sepuede considerar que está concentrada la masa, de tal modo que se obtenga el mismo efecto.En la figura l3-la una serie de masas concentradas están localizadas sobre unarecta. El centro de masa G o centroide está ubicado en¡-N.. m;x¡
i = -7í.':'iINC;---.. m i..¡ im¡x¡ + m2X2 + m3X)mt+m2+m3( 13-1)En la figura 13-1b, las masas se localizan sobre un plano. Se puede obtener lacoordenada x del centro de masa G a partir de la ecuación 13-1. La coordenada yse escribe como(13-2)Este procedimiento puede extenderse hacia masas concentradas en un volumen,escribiendo sencillamente una ecuación como la (13-1) para el eje z.Cuando la masa está distribuida en un plano, a menudo se puede encontrar elcentro de masa por simetría. En la figura 13-2 se muestra la ubicación para un
(al (b) (e)Figura 13-2
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 441/508
450 TEORíA DE MÁQUINAS Y MECANISMOSFigura 13·3 Forma compuesta.círculo, un rectángulo y un triángulo. Nótese que la intersección de las medianasubican a G para el triángulo.El área plana de la figura 13-3 tiene una forma compuesta constituida por unárea rectangular más un área triangular menos un área circular. Se puede hallar la
ubicación de los centroides de las partes Gh O2 y G3 con la ayuda de la figura 13-2.Entonces se localiza el centro de masa G del área compuesta aplicando la ecuaciónA¡x¡ + Azxz - A3X3A¡+Az-A3en donde la expresión correspondiente para y es similar.(13-3)Se puede obtener un conjunto más general de relaciones para la localización deun centroide en un plano, utilizandó la integración en lugar de la suma. Así, pues,las relaciones se convierten en(13-4)en donde x' y y' son las distancias al centroide del área dA, medidas en dirección
paralela a los ejes x y y. respectivamente.Para cuerpos tridimensionales, las ecuaciones (13-4) se pueden escribir entérminos de masas en lugar de áreas; en tal caso, las ecuaciones quedanZ = .. I Z' dm (13-5)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 442/508
FUERZAS DINÁMICAS 45113-3 MOMENTO DE INERCIAOtro problema que se presenta a menudo cuando las fuerzas están distribuidassobre un área, es el que consiste en calcular su momento en torno a un eje especificado.En ocasiones, la intensidad de la fuerza varía de acuerdo con su distancia
al eje del momento. Un análisis matemático de este tipo de problema siempre conducea una integral de la forma f (distancia)2 x área diferencial. Esta integral seconoce con el nombre de momento de inercia del área. Algunas autoridades en lamateria prefieren denominar a esta integral segundo momento del área, afirmandoque un área no puede poseer inercia y, por ende, el término "momento de inercia"para una integral de esta naturaleza es un error. Sin embargo, el término se utilizacon amplitud y es preciso aprender a vivir con él.Las fórmulas para los segundos momentos de área en torno a los ejes x y yson, respectivamente,Ix = r y2 dA y (13-6)En este caso, Iy e Ix reciben el nombre de momentos rectangulares de inercia; y
laintegral(13-7)se conoce como momento polar de inercia del área. Una relación entre las ecuaciones(13-6) y (13-7) esJz = Ix + IyEn ocasiones, el momento de inercia se expresa en la forma1 =k2Aen donde, por supuesto,(13-8)(13-9)(13-10)Aquí, k se conoce como radio de giro; es una medida cuantitativa de la distribución
del área respecto a los ejes del momento.Se han resuelto las ecuaciones (13-6) a (13-10) para las formas más comunes, yen la tabla 4 del apéndice se dan los resultados. Para obtener un momento de inerciaa cualquier distancia especificada d al eje centroidal, úsense las fórmulas detransferencia:Iy .. - 2 .. Iy + Ady (13-11)El momento de inercia de un volumen es un momento de inercia verdaderoporque un volumen tiene masa. Sin embargo, para distinguirlo del correspondiente a un área se denomina muy a menudo momento de inercia de masa. En el caso deun volumen, las integrales de inercia son
Ix f (y2 + Z2) dm Iy = f (x2 + Z2) dm lz = f (x2 + y2) dm (13-12)
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 443/508
452 TEORíA DE MÁQUINAS Y MECANISMOSOtro conjunto de integrales que pueden aparecer también en los análisis matemáticosson los llamados productos de inercia:Ixy = f xy dm Iyz = f yzdm Izx = f zx dm (13-13)Las ecuaciones (13-13) son útiles porque, cuando estas integrales se hacen cero,definen los tres ejes coordenados de un cuerpo llamados ejes principales. Entonc
eslos valores correspondientes de las ecuaciones (13-12) reciben el nombre de momentosprincipales de inercia de masa. La tabla 5 del apéndice se ha obtenidoresolviendo las ecuaciones (13-12) para una diversidad de sólidos geométricos.Todos estos momentos de inercia se dan en torno a los ejes principales y, por ende,los productos de inercia se anulan.La forma general de la fórmula de transferencia, o del eje paralelo para elmomento de inercia de masa se escribe1 = le + md2 (13-14)en donde le es el momento principal de inercia e 1 es el momento de inercia en t
ornoa un eje paralelo que está a una distancia d del eje original. La ecuación (13-14)sólo debe usarse cuando se trasladan los ejes de inercia. La rotación de estos ejesconduce a la introducción de términos de producto.También se usa el término radio de giro con el momento de inercia de masa;las relaciones sonle = J(-m (13-15)Ejemplo 13-1 En la figura 13-4 se muestra un prisma de acero soldado a una varilla delgada paraformar un péndulo. Suponiendo que la varilla carece de peso, calcúlese el momento deinercia delpéndulo en torno a o. Úsese p = 7.80 Mgím' como la densidad de masa del acero.SOLUCIÓN La masa del prisma se calcula como sigue:
1 000 kg/Mg m = abcp = 75(100)(12)(7.8)(1 000 mm/m)' 0.702 kgEntonces, segúIJ la tabla 5 del apéndice, se encuentra que el momento de inercia demasa del prismaen torno a su propio centro de masa esm 2 2 0.702 , 2 , la = -(a + e) =--[(75)- + (100) 1 = 914 kg· mm- 12 12Figura 13-4 Dimensiones en milímetros.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 444/508
FUERZAS DINÁMICAS 453Figura 13-5Ahora se usa la ecuación (13-14) para hacer la transferencia al eje que pasa por O. A..í, pues,lo = la+md2 914+(0.702)(25Of 44800 kg' mm'o bien, en unidades básicas,
1 lo = (44 800) (l 000 mm/m)2 0.0448 kg . m' Resp.Ejemplo 13-2 En la figura 13-5 se presenta una biela de fundición hierro. Encuéntrese el momentode inercia de masa de la biela en torno al eje z en unidades gravitacionales ips. Úsese w = 0.260Ib/pulg3 como unidad de peso de la fundición de hierro.SoLUCIÓN El problema se resuelve hallando el momento de inercia de cada uno de loscilindrosde los extremos y del prisma central en torno a sus propios centros de masa. Luego se aplican lasfórmulas de transferencia para pasarlos al eje z.La masa de cada cilindro es
1Tlw(d2 lTI,;,yl = 4g o d?) = 1'l{0.75)(0.260)[(3)2 - (l)2J , 4(386)0.003 17lh . s2/pulgSegún la tabla S del apéndice, se encuentra que el momento de inercia de cada cilindro esla.cyl.= i"<d; + dr> 0.00; 17[(3)2 + (1)2) 0.003 96 lb . 52 . pulgLa masa del prisma central esnIp, = ab;w = 0.75( 1)..(0.260) = 0.006 57 lb . s2/pulgLuego, el momento de jnercia del prisma en torno a su centro de masa esla.p, = m 0.00657 12 (b2 + el) = -1- +( 3?1 = 0.005 48 lb . 52 pulgAl aplicar la fórmula de transferencia, se obtiene finalmente1, = le.eyl + (la.eyl + lTI,;,yld..yl) + (la.p, + fflprd..,)= 0.003 96 + [0.003 96 + (0.003 l7)(l6fJ + [0.00 5 48 + (0.006 57)(8)2]1.25 lb . 52 . pulg Resp.
134 FUERZAS DE INERCIA Y PRINCIPIO DE D' ALEMBERTConsidérese un cuerpo rígido en movimiento de masa m que recibe la acción decualquier sistema de fuerzas, por ejemplo, F" F2 Y F3, como se ilustra en la figura
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 445/508
454 TEORÍA DE MÁQUINAS Y MECANISMOSyo.------------------x(alFigura 13-6y
o.-------------------x(b)13-6a. Desígnese el centro de masa del cuerpo como el punto G y encuéntrese laresultante del sistema de fuerzas a partir de la ecuación(a)En el caso general, la línea de acción de esta resultante no pasará por el centro demasa, sino que estará desplazada cierta distancia, por ejemplo la distancia h, comose indica en la figura. En ei estudio de la mecánica se demuestra que el efecto de este sistema de fuerzas no balanceado es producir aceleraciones lineales y angulares
cuyos valores están dados por(13-16)(13-17)en donde Aa es la aceleración del centro de masa y a es la aceleración angular dem (Fig. 13-6b). La cantidad I F es la resultante de todas las fuerzas externas queactúan sobre el cuerpo, y I Ma es la suma de los momentos externos junto con losmomentos de las fuerzas externas, tomados en torno a G en el plano del movimiento.El momento de inercia de masa se designa como 1 y también se toma conreferencia al centro de masa G.Las ecuaciones (13-16) y (13-17) muestran que cuando un sistema no balanceadode fuerzas actúa sobre un cuerpo rígido, éste experimenta una aceleración
lineal Aa de su centro de masa en la misma dirección que la fuerza resultanteI F; que el cuerpo experimenta también una aceleración angular a, debido a losmomentos de las fuerzas y los momentos de torsión en torno al centro de masa, enla misma dirección que el momento resultante I Mo. Si se conocen las fuerzas y los momentos, se pueden usar las ecuaciones (13-16) y (13-17) para determinar lasaceleraciones resultantes.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 446/508
FUERZAS DINÁMICAS 455En el diseño de ingeniería, por lo común se especifica el movimiento de loselementos de la máquina por adelantado, mediante otras necesidades de la máquina.En tal caso, el problema es: dado el movimiento de los elementos de lamáquina, ¿qué fuerzas se requieren para producir estos movimientos? Por consiguiente,el problema requiere: 1) un análisis cinemático para determinar las
aceleraciones lineales y angulares de los diversos elementos, y 2) una definicióndela forma real, las dimensiones y el material de los elementos; de otra manera, no sepodrían determinar las masas y los momentos de inercia. En los ejemplos quese demostrarán aquí, sólo se presentarán los resultados del análisis cinemático. Laselección de los materiales, la forma y muchas de las dimensiones de los elementos de la máquina es tema del disefio de máquinas y no se examinarán aquí en formaalguna.Puesto que, en el análisis dinámico de las máquinas, los vectores aceleraciónpor lo general se conocen, con frecuencia resulta conveniente una forma alternat
ivade las ecuaciones (13-16) y (13-17) al determinar las fuerzas requeridas paraproducir estas aceleraciones conocidas. En consecuencia, se puede escribir.. F-mAo=O.. Mo-la=O( 13-18)(13-19)Estas dos ecuaciones son vectoriales que se aplican al movimiento plano de uncuerpo rígido. La (13-18) afirma que la suma vectorial de todas las fuerzas externasque actúan sobre el cuerpo, más la fuerza ficticia -mAo , es cero. La fuerza ficticia-mAa recibe el nombre de fuerza de inercia, y tiene la misma línea de acción que
Aa, pero el sentido opuesto. La ecuación (13-19) afirma que la suma de los momentosde todas las fuerzas externas en torno a un eje que pasa por G, perpendicularal plano del movimiento, y los momentos de torsión externos que actúansobre el cuerpo, más un momento de torsión ficticio -1 a, es cero. El momento detorsión ficticio -1 a se conoce como momento de torsión de inercia. Este momentode torsión tiene el sentido opuesto al del vector aceleración angular a. Lasecuaciones (13-18) y (13-19) son extremadamente útiles cuando se estudia la dinámica de la maquinaria, porque permiten agregar fuerzas de inercia y momentosde torsión al sistema extremo de fuerzas y resolver el problema resultante aplicando
los métodos de la estática.Las ecuaciones antes citadas se conocen con el nombre de principio deD'Alembert, porque fue este científico quien primero llamó la atención al hechode que la adición de fuerzas de inercia al sistema real de fuerzas permitia que seobtuvierauna solución a partir de las ecuaciones de equilibrio. Convendría hacernotar que las ecuaciones también se pueden escribir(13-20)en donde se sobreentiende que tanto las fuerzas como los momentos externos y de
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 447/508
456 TEORíA DE MÁQUINAS Y MECANISMOS3(a) (b) (e)Flgura 13-7inercia, se deben incluir como términos en ¡ F Y 2: M. La ecuación (13-20) es útilporque permite tomar una suma de los momentos en torno a cualquier eje perpendic
ularal plano del movimiento.El principio de D' AIembert se resume como sigue: la suma vectorial de todaslas fuerzas externas y las fuerzas de inercia que actúan sobre un cuerpo rígido escero. La suma vectorial de todos los momentos externos y todos los momentos detorsión de inercia que actúan sobre un cuerpo rEgido también es cero por separado.Las ecuaciones (13-20) se pueden combinar cuando se desea una solucióngráfica mediante un polígono de fuerzas. En la figura 13-7a un elemento recibe acciónde dos fuerzas. externas F43 y F23 La resultante· F43 + F23 produce una aceleraciónAa del centro de masa del elemento y una aceleración angular ah debido aque la línea de acción de la resultante no pasa por el centro de masa. Al representar
el momento de torsión de inercia -la3 como un par, como se ilustra en lafigura 13-7b, se eligen intencionalmente las dos fuerzas de este par de tal modoquesean ±mAa. Para que el momento del par tenga la magnitud - la" la distanciaentre las fuerzas debe serh la3mAG (13-21)Debido a esta elección particular del par, una fuerza del mismo cancela exactamentea la propia fuerza de inercia y deja sólo una fuerza, como se observa en lafigura 13-7c, que incluye los efectos combinados de la fuerza de inercia y el momentode torsión de inercia.
Ejemplo 13-3 Determínese la fuerza FA que se requiere para producir una velocidadVA 12.6pie/s para el mecanismo que aparece en la figura B-Sa. Supóngase que el eslabonamiento está enel plano horizontal, de tal modo que la gravedad actúa en sentido normal al planodel movimiento;supóngase también que no hay fricción. El eslabón 3 pesa 2.20 lb e 1, = 0.0479 lb· 52 pu.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 448/508
FUERZAS DINÁMICAS 457(a)(e)A..A =713pie/sAB-888 pie/s2b.. _ -L __ .... ___ ..Oa
g AG-444 pie/sÍ(b)Figura 13.. 8 OB = 6 pulg; OA 8 pulg; AG = S pulg.SoLUCIÓN 'Un análisis cinemático de las aceleraciones proporciona la información que semuestraen la figura 13-8b. La aceleración angular esA..A 713a, 856 dI RBA = 10/12 = fa S mmrLa masa del eslabón 3 es m = Wlg = 2.201386 = 0.0057 lb . s2/pulg. Entonces la (13-21) dah IG¡a3 - (O.0479)(856r· 1.35 pulg mAG - (0.0057)(444)(12)En la figura 13-8c se dan el diagrama de cuerpo libre y el poUgono de fuerzas re
sultante.Nótese que la fuerza de inercia -mAG está desplazada respecto a G la distancia h, demanera quese produzca un momento de -la) en torno a G, y que -mAa tiene el sentido opuestoal de Aa. La reacción en B es F43 y está verticalmente hacia abajo debido a que sehace caso omiso de lafricción. Las fuerzas en A son la fuerza actuante FA y la reacción del bloque F2}. que es horizontal,debido también a que se desprecia la fricción. El punto de concurrencia es la intersección de-mAG y F43 de las cuales se conocen las direcciones. La línea de acción de FA + F", de la fuerzatotal en A, debe pasar por el punto de concurrencia. Este hecho permite la I con
strucción depolígono de fuerzas. As! pues, se conoce la dirección de las fuerzas desconocidas FAY F23 , Y seencuentran como componentes de FA + Fn, como se ilustra en la figura. Midiendo se encuentraque la fuerza actuante esFA = 27j lb Resp.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 449/508
458 TEORtA DE MÁQUINAS Y MECANISMOS13-5 PRINCIPIO DE SUPERPOSICIÓNSistemas lineales son aquellos en los que el efecto es proporcional a la causa.Estosignifica que la respuesta o salida de un sistema depende directamente del impulso,
o entrada, al mismo. Un resorte es un ejemplo de sistema lineal; la deflexión de unresorte (salida) es proporcional a la fuerza (entrada) que se ejerza sobre el mismo.Se aplica el principio de superposición para resolver los problemas, considerandopor separado cada uno de los impulsos o entradas a un sistema. Si éste eslineal, se pueden sumar, o superponer, las respuestas a cada una de estas entradas,unas a otras, para determinar la respuesta total del sistema. Por consiguiente,elprincipio de superposición afirma que para los sistemas lineales se pueden superponer
las respuestas individuales a varias perturbaciones, o funciones impulsoras,para obtener la respuesta total.Entre los ejemplos de sistemas no lineales a los que no se aplica el principio desuperposición están los resortes que se hacen cada vez más rígidos mientras más sedeforman, la fricción de Coulomb en sistemas, y los sistemas con holgura o juego.13-6 EJEMPLO DE ANÁLISIS GRÁFICOYa se han demostrado todos los principios que se requieren para llevar a cabo un análisis completo de fuerzas dinámicas de un mecanismo de movimiento plano.Los pasos para hacer este tipo de análisis se pueden resumir como sigue:l. Hágase un análisis cinemático del mecanismo para hallar la aceleración angularde cada eslabón o elemento. Localícese el centro de masa de cada eslabón y
determínense las aceleraciones de estos puntos.2. Con el valor o los valores dados de la fuerza o momento de torsión que debe entregarel seguidor, hágase un análisis completo de las fuerzas estáticas delmecanismo. Los resultados de este análisis incluirán entonces las magnitudes ydirecciones de las fuerzas y momentos de torsión que actúan sobre cada elemento.Obsérvese en particular que se trata de un análisis de fuerzas estáticas y'queeno se incluyen las fuerzas o momentos de torsión de inercia.'3. Utilizando los valores dados de las masas y momentos de inercia, así como lasaceleraciones angulares y lineales halladas en el paso 1, calcúlense las fuerzas d
einercia y los momentos de torsión de inercia para cada eslabón o elemento delmecanismo. Considerando a éstas como fuerzas aplicadas. Hágase un análisisde cuerpo libre de cada elemento del mecanismo completo a fin de hallar elefecto total de todas las fuerzas y todos los momentos de torsión de inercia.4. Hágase la suma vectorial de los resultados de los pasos 2 y 3 para obtener lasfuerzas y los momentos de torsión resultantes para cada elemento de la máquina.Ejemplo 13-4 Hágase un análisis completo de las fuerzas dinámicas del eslabonamiento de cuatrobarras que aparece en la figura 13-9. Las cantidades dadas están incluidas en el pie de la figura,

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 450/508
Ac -492 pie/s 2eAA..900 pie/s2AG.-758 pie/s 2FUERZAS DINÁMICAS 459Figura 13-9 OlA = 3 pulg, AB = 20 pulg, O,B 10 pulg, 0204 14 pulg, 04G, = 5.69 p
ulg, AG,= 10 pulg, Be = 6 pulg, O,C = 8 pulg, W2 60 rad/s, al = O rad/s2, W3 = 7.13 lb,le;, = 0.625Ib·s2 pulg, W. = 3.42 lb, la. = 0.037 Ib·s2 pulg. Las posiciones angulares de los diversos eslabonesse han calculado para la posición dada del eslabón 2, y se indican en la figura.SOLUCIÓN El primer paso consiste en llevar a cabo el análisis cinemática del mecanismo. Estepaso no se incluye aquí, pero en la figura 13-9 se da el polígono de aceleraciones resultante delanálisis. Los resultados numéricos se muestran en el polígono, en caso de que el lector desee
verificarlos. Mediante los métodos del capítulo 4, se encuentra que la aceleración angular de loseslabones 3 y 40:; 148 rad/s" cmr 0:, 604 rad/s" mmrUna parte importante del análisis se refiere a los eslabones 3 y 4, porque el centro de masa deleslabón 2 está localizado en 0,. Los diagramas de cuerpo libre de los eslabones 4 y3 se muestranpor separado en las figuras 13-10 y 13-11, respectivamente. Obsérvese también que estos diagramasestán dispuestos en forma de ecuación para simplificar su lectura. Por consiguiente,encada ilustración las fuerzas en (a) más las de {h} y (e) producen las resultantes qu
e aparecen en(d). Los dos conjuntos de ilustraciones también están correlacionadas; por ejemplo,F;. de lafigura l3-lOa es igual a -F., de la figura 13-11a, etc. El siguiente análisis no es difícil, pero sícomplicado; léase con lentitud y examínense con cuidado las ilustraciones, detalle por detalle.Empíecese con el eslabón 4 de la figura l3-10a. Procediendo según las investigacionesanteriores,se hacen los siguientes cálculos:Ir;,(l4 O.037(604l 22.3 lb . pulg3 1tl .42(349) 4A(;, = 32.2
37.1 lb I(i,0:4 _ 22.3m.A", - 37.10.602 pulg
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 451/508
f..4-m4AG..F{4(a)+lb)+
..---
..(e)FeF"..14 F '"34fe(d)-m4AG4Fee
Figura 13-10 Diagramas de cuerpo libre del eslabón 4; -m4Aa, 37. 1 lb, F'..4 = 24,3 lb, Fj4 44.3 lb, F..4 = -Fr. -FX3 = 94.8 lb, Fe 40 lb,F...í 25 lb, F'{;' = 19.3 lb, F14 94.3 lb, FI4 132 lb,..@..)-g3:)-,1:)c:Z
..-<......(Il

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 452/508
FUERZAS DINÁMICAS 461Ahora, la fuerza - m.AG, = 37.1 lb se coloca en el diagrama de cuerpo libre condirección opuestaa AG, y fuera de centro respecto a O. en la distancia h . La dirección de la excentricidad es la quese necesita para producir un momento de torsión en torno a O. opuesto a lG,a . La d
irección deF\ .. se toma a lo largo del eslabón 3. La intersección de F3. y -m.AG, da el puntode concurrenciay establece la dirección de Fí . Ahora se puede construir el polígono de fuerzas y hallarse lasmagnitudes de Fí4 y Fí . Estos valores se dan en el pie de la figura.A continuación sígase con la figura 13-110. Ahora se conocen las fuerzas F;n y Fí, gracias alanálisis anterior.Ahora, pásese a la figura 13-11b y al eslabón 3, y hágase los cálculosIG,a3 = 0.625(148) = 92.5 lb . pulgm3AGJ = .2.;(758) = 1681b h = .. = 92.5
3 m3Ac;, 168 = O 550 I . pu gLocalícese la fuerza de inercia -m,Arrt = 168 lb en el diagrama de cuerpo libre, con direcciónopuesta a AG" Y fuera de centro una distancia h, en relación con O" de modo que seproduzca unmomento de torsión en torno a 03, con dirección opuesta a a3' La dirección de F43 es alo largode la recta RO . Las fuerzas -m3ACrt Y F4, se intersecan para determinar el puntode concurrencia.Por ende, se conoce la dirección de F:;3 y se puede construir el polígono de fuerzas. Losvalores resultantes de F43 y F23 se incluyen en el pie de figura.En la figura 13-lOb, ahora se conocen las fuerzas F34 y Fr. que actúan sobre el es
labón 4,gracias al análisis que se acaba de realizar.En las figurs 13-lOe y 13-11e se presentan los resultados del análisis de fuerzasestáticas siendoFe = 40 lb la cantidad dada. El polígono de fuerzas de la figura 13-10e determinalos valores delas fuerzas que actúan sobre el eslabón 4 y, a partir de ésta, se encuentran la dirección y magnitudde las fuerzas que operan sobre el eslabón 3.El siguiente paso es una adición vectorial de estos resultados ya obtenidos, comose indica en(d) de cada figura.
El análisis se completa tomando la fuerza resultante F" de la figura 13-11d y aplicar su negativa,Fn. :tI eslabón 2. Esto se hace en la figura 13-12. La distancia h, se encuentra por medición.El momento de torsión externo que se debe aplicar al eslabón 2 esTIc = h,F" = 1.56(145) = 226 lb . pulg mmrNótese que este momento de torsión tiene dirección opuesta a la de la rotación del eslabón2.13-7 ROTACIÓN ALREDEDOR DE UN CENTRO FIJOLas secciones previas se ocuparon del caso general de las fuerzas dinámicas paraun cuerpo rígido que tiene un movimiento combinado de traslación y rotación. Esimportante hacer hincapié en que las ecuaciones y los métodos de análisis investigados
en estas secciones son generales y se aplican a todos los problemas demovimiento plano. Será interesante ahora estudiar la aplicación de estos métodos aun cuerpo rígido que gira en torno a un centro fijo.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 453/508
Supóngase un cuerpo rígido restringido a girar en torno a algún centro fijo0, que no coincide con el centro de masa G (Fig. 13-13a). Se va a aplicar al cuerpoun sistema de fuerzas (que no se indica), haciendo que adquiera una aceleraciónangular a. También se incluye el hecho de que el cuerpo está girando con una

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 454/508
462 TEORÍA DE MÁQUINAS Y MECANISMOS+F2'"3(e)F'" A 23..,: ....-(d)
FU' 43 F43'"B / ..r¡¡iIIII jF¡;J<lgura 13·11 Diagramas de cuerpo libre del eslabón 3; Fh -F2, "" -F\4 = 24.3 lb. -m,Aa. = 168 lb,F..3 94.8 lb, F...l 145 lb, F..\ = -F13 = -F.... 25 lb. F43 = -F'4 = 94.3 lb, F23 145 lb.
Figura 13·12 Diagrama de cuerpolibre del eslabón 2; F'\2 -Fn-F12 = 145 lb, TI2 226lb·pulg.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 455/508
FUERZAS DINÁMICAS 463velocidad angular w. Este movimiento del cuerpo significa que el centro de masatendrá componentes transversales y radicales de aceleración Ab y Ad, cuyasmagnitudes son, respectivamente, roa y row2 Por ende, si la fuerza exterior resultantese resuelve en sus componentes transversal y radial, éstas deberán tener las
magnitudesy (a)según la ecuación (13 -16). Además, la (13-17) afirma que debe existir un momentode torsión externo para crear la aceleración angular y que la magnitud de estemomento de torsión es TG la. Si ahora se suman los momentos de estas fuerzasen torno a 0, se tienel: Mo = la + ra{mrGa) = (l + mr'b)a (b)(a) (b){el (diFigura·13-13
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 456/508
464 TEORIA DE MÁQUINAS Y MECANISMOSPero, la cantidad entre paréntesis en la ecuación (b) es idéntica a la ecuación (13-14) Y transfiere el momento de inercia hacia otro eje que no coincide con el centrode masa. Por ende, la (b) se puede escribir en forma vectorial como¿ Mo = loo.
Entonces las ecuaciones (13-18) y (13-19) se convierten en¿F- mAo=O (13-23)¿ Mo - loo. = O (13-24)mediante la inclusión de la fuerza de inercia -m Ao Y el momento de torsión deinercia -loo. (Fig. 13-13e). Se observa sobre todo que el sistema de fuerzas nosereduce a un solo par, debido a la existencia de la componente de fuerza de inercia-mro w2, que carece de brazo de momento en torno a O. Así pues, tanto la (13-23)como la (13-24) son necesarias.Se presenta un caso particular cuando a = O. Entonces, el momento externoMo es cero y la única fuerza de inercia es, según la figura 13-13e, la fuerza centrífu
ga-mrow2.Existe un segundo caso bajo las condiciones de arranque en las que w = O,pero a no es cero. Bajo estas condiciones, la única fuerza de inercia es -mroa, yel sistema se reduce a un solo par.Cuando un cuerpo rígido tiene un movimiento de traslación pura, la fuerza deinercia resultante y la fuerza externa resultante tienen la misma línea de acción,que pasa por el centro de masa del cuerpo. Cuando un cuerpo rígido tiene rotacióny aceleración angular, la fuerza de inercia resultante y la fuerza externa resultantetienen la misma línea de acción, pero ésta no pasa por el centro de masa. Localíceseahora un punto de la línea de acción de la resultante de las fuerzas de inerciade la figura 13-13c.
La resultante de las fuerzas de inercia pasará por el mismo punto P de la recta00 de la figura 13-13e, o en una prolongación de la misma. Esta fuerza se puederesolver en dos componentes, una de las cuales será -mrow2, que actúa a lo largode la recta OG, Y la otra será -mroa , que actúa perpendicularmente a OG, perono pasa por el punto G. Se puede hallar la distancia, designada como 1, hasta el punto desconocido P, igualando el momento de la componente -mroa, que pasapor P, a la suma del momento de torsión de inercia y el momento de las fuerzas deinercia que actúan pasando por G. Así pues, al tomar los momentos en torno a O,se tieneo bien,(-mroa)/= -la + (-mroa)ro
[=--1 +rG mro(e)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 457/508
FUERZAS DINÁMICAS 465Substituyendo el valor de 1 dado en la ecuación (13-15), se tiene[=-,¿ +ra ra (13-25)El puntoP localizado por la (13-25) y que se muestra en la figura 13-13d se conocecon el nombre de centro de percusión. Como se indica, la fuerza de inercia resulta
ntepasa por P y, en consecuencia, la fuerza de inercia tiene un momento cero entorno al centro de percusión. Si se aplica una fuerza externa en P, perpendicularaOG, se producirá una aceleración angular a, pero la reacción del cojinete en Osera cero, excepto por la componente radial debida a la fuerza de inercia -mraw2.Una de las prácticas comunes en las máquinas para pruebas de choque es aplicarla fuerza en el centro de percusión, con el fin de eliminar la reacción transversalenel cojinete, debida a la fuerza externa.En la (13-25) se muestra que la ubicación del centro de percusión es independiente
de los valores de w y a.Si el eje de rotación coincide con el centro de masa, ra = O y la (13-25) muestraque [= oo. En esas condiciones no se tiene fuerza de inercia resultante, sino, por elcontrario, se tiene un par de inercia resultante -la .Para concluir esta secci6n, se obf>erva que las componentes transversal y radial de la aceleración de G se puede escribirA..=axRaAá = 00 x (00 x Ra)(13-26)(13-27)en donde Ra es el vector de posición del punto G. Ahora las ecuaciones (a) se
pueden expresar en forma vectorial:(13-28)L F' = mwx(wxRa) (13-29)La fuerza externa resultante definida en términos de las componentes transversal y radial, como las dan estas ecuaciones, a menudo resulta útil en el análisis.13-8 MEDICIÓN DEL MOMENTO DE INERCIACon frecuencia, la forma de un cuerpo es tan compleja que es imposible calcularelmomento de inercia. Considérese, por ejemplo, el problema de hallar el momentode inercia de un automóvil, en torno a un eje vertical que pase por su centro demasa. Para este tipo de problemas por lo general resulta factible determinar el
momento de inercia, observando el comportamiento dinámico del cuerpo en respuestaa una entrada conocida.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 458/508
466 TEORlA DE MÁQUINAS Y MECANISMOSA muchos cuerpos, por ejemplo, bielas y manivelas, se les da una forma talque se puede suponer que sus masas están en un solo plano. Si se pueden pesar estoscuerpos y localizar sus centros de masa, es factible suspenderlos como un pénduloy hacerlos oscilar. Entonces se puede calcular el momento de inercia de este
tipo de cuerpos basándose en la observación de su periodo o frecuencia de oscilación.Como se ilustra en la figura 13-140, la pieza se debe suspender más omenos cerca del centro de masa; pero no en coincidencia con éste.Por lo común no resulta necesario hacer una perforación para suspender elcuerpo; por ejemplo, una rueda o engrane dentado se pueden suspender sobre unacuchilla en el borde.Cuando el cuerpo de la figura 13-14a se desplaza un ángulo O, una fuerza degravedad mg actúa en G. Al sumar los momentos en torno a O da¿: Mo -mg(ra sen O) loe = o (a)El objetivo es que el péndulo oscile describiendo sólo ángulos pequefios, de modoque sen O se pueda sustituir por O. Entonces la ecuación (a) se puede escribir(b)
Esta ecuación diferencial tiene la bien conocida soluciónO = el sen ..m::a t + e2 cos .Jm::a t (e)en donde el y e2 son las constantes de integración. El movimiento del péndulo seiniciará desplazándolo un ángulo pequefio 00 y soltándolo desde esta posición. Porende, cuando t O, O = 00, y ó = O. Sustituyendo estas condiciones en la ecuación(e) y su primera derivada permite evaluar las constantes; asi se encuentra el =o ye2 = Oo. Por consiguiente,0= 00 cos ..m::G t (13-30)(a) (b) Figura 13-14

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 459/508
FUERZAS DINÁMICAS 467Puesto que una función coseno se repite cada 3600, el periodo del movimiento ensegundos es"De donde,2 ¡ lo
7T V mgra (d)Esta ecuación indica que se debe ajustar el peso del cuerpo para que sea mg, sedebe medir la distancia ro y luego debe suspenderse el péndulo y hacerse oscilar demanera que se pueda observar el periodo í. A continuación se puede resolver laecuación (13-31) para dar el momento de inercia lo en torno O. Si se desea elmomento de inercia en torno al centro de masa, se puede obtener aplicando la fórmulade transferencia (13-14).En la figura 13-14b se muestra cómo puede determinarse el momento de inerciasin pesar el cuerpo en realidad. La inercia 1 se conecta a un alambre o unavarilla delgada en el centro de masa de la inercia. Se define una rigidez a la t
orsiónkt de la varilla o alambre como el momento de torsión necesario para torcer lavarilla en un ángulo unitario. Si la inercia de la figura 13-14b se hace girar describiendocualquier ángulo (J y luego se suelta, la ecuación del'IDovimiento se convierteen¡j+..la (J OEsta es similar a la ecuación (b), y con las mismas condiciones de partida tiene lasolución¡kt e = (Jo cos V la t (13-32)Así pues, el periodo de oscilación eso bien,
lo k' (2:Y (13-33)Por lo general se conoce la rigidez a la torsión o se puede calcular a partir delconocimiento de las dimensiones de la varilla y su material. Entonces se observalaoscilación de la inercia desconocida la y se usa la ecuación (13-33), para calcularla. De otra manera, cuando se desconoce k¡, se puede montar una inercia conocidaen la varilla y aplicar la (13-33) para determinar k,.El péndulo trifilar, llamado también péndulo de torsión de tres cuerdas que seilustra en la figura 13-15, puede ser un método muy exacto para medir el momentode inercia de masa. Tres cuerdas de igual longitud sostienen una plataforma de

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 460/508
468 lEORÍA DE MÁQUINAS Y MECANISMOSFigura 13-15peso ligero y están igualmente espaciadas alrededor del centro de ella. Una plataformaredonda daría el mismo servicio que la triangular que aparece en la ilustración.La pieza cuyo momento de inercia se va a determinar se coloca con sumo
cuidado sobre la plataforma de modo que el centro de masa del objeto coincidacon el centro de la plataforma. Entonces se hace oscilar la plataforma y secuenta el número de oscilaciones durante un periodo especificado. tLa anotación para el análisis de péndulo tri filar es la siguiente:m = masa de la Riezamp masa de tn: plataformalo momento de inercia de la piezaIp = momento de inercia de la plataformar = radio de la plataforma(J = ángulo de la plataformaI = longitud de la cuerdaq;, ángulo de la cuerda
z eje vertical que pasa por el centro de la plataformaSe principia escribiendo la (13-19) para el eje z, lo cual da2: M, = -r(m + mp)g sen q;, (lo + lp)jj O (e)t Se pueden hallar detalles adicionales en l a obra de F. E. Fisher y H. H. Alvord,Instrumentatíonfor Mechanical Analysis, The University of Michigan Summer Conferences, Ann Arbor, Michigan,1977. p. 129. En análisis ql,le se presenta aquí es con autorización de los autores.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 461/508
FUERZAS DINÁMICAS 469Puesto que se está tratando con movimientos pequeños, los senos de los ángulos.De donde,y la ecuación (e) se convierte en!.1 .fJjj + (m + me)r2g () O f(le + lp)
Esta ecuación se puede resolver en la misma forma que la (b). El resultado es(f)(g)1 1 = (m + mp)r2g (..)2 a + e 1 211' (13-34)Esta ecuación se debe utilizar primero con una plataforma vacia. Cuando se conocen le Y me' la ecuación se puede resolver con suma facilidad para la inercia desconocidala.13-9 ANÁLISIS DE UN MECANISMO DE CUATRO BARRASEjemplo 13-5 Como ejemplo de un análisis dinámico en el que se usan unidades SI, seael eslabonamiento
de cuatro barras de la figura 13-16. Los datos requeridos, basados en un análisiscinemático completo, aparecen en la figura y en su pie.SOLUCIÓN Se parte de la s iguiente información cinemática: ..a3 = -1l9krad/s2Aa, = 162/-73.2° m/s2IX.¡ -625k rad/s2Aa, 104/233° m/s2F1gura 13-16 Dimensiones en milimetros ; 02A = 60, 0,0, = lOO, AB 220,0,B 150, AG,90, O,C = BC = 120. 04G4 = 90, W¡ = 48 rad/s, m3 = 1.5 kg, m4 = 5 kg, 13 0.012 kg'rn1, l.0.054 kg'rn2, a) = -119k rad/s2, a. = -625k rad/s\ Aa, = 162 m/s2, Aa, 104 m/52,Fe -0.8) kN:

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 462/508
470 TEORÍA DE MÁQUINAS Y MECANISMOSLas dos fuerzas de inercia sony-m3AG:J l.i.2) /-73.2 + 180" -0.070{ + 0.233j kN5(104) A '-m4Aa,= 1000 /233 lsoo=0.313i+0.415jkN
Por supuesto, Fe = -0.8j kN. Se necesitan los siguientes vectores de posición (véasela Fig.13-16; nótese que las dimensiones están en milimetros):RA 60.. -25.41 + 54.4jRG:JA = 90/48.7° = 59.41 + 67.6jRBA = 220/18.7° = 2081 + 70.5jRB 150/56.4° = 83.0{ + 125jRo, = 90/20.4° 84.41 + 31.4]Re = 120/5 1° = 1201 + 10.7jEl análisis se principia con el eslabón 4 y se determinan las fuerzas F. Éstas se deben a Fe Y -m.AG, haciendo caso omiso de los efectos de -mlAG, Y -[¡al. Si se tomanmomentos en torno
a 04, se obtiene la ecuaciónSe encuentra que los tres primeros términos sonRo,o, x ( -m.Aa.) 25.2k-1.ex. = -0.054( -625k) = 33.8kReo. x Fe = -95.6kLa fuerza Fl4 tiene la misma dirección que el eslabón 3; de dondeEntoncesF;" F;..lJt8.7°= (0.9471 + 0.32Ij)F..RBo,xF}. -91.7F..(1)Ahora se deben sustituir estos cuatro términos en la (1). Después de resolverla, seencuentra queF.. =-0.400 kN. Por tanto,
F.. -0.400/18.7° -0.378f -0.128j = 0.400[198.7° kNA continuación, al sumar las fuerzas sobre el eslabón 4 se obtiene la ecuaciónAhora se conocen todos los términos, excepto Fí . Después de resolver, se encuentraFí. 0.06551 + 0.513j 0.517/82.7° kN(2)Pasando al eslabÓn 3, se supone que las fuerzas F' se deben únicamente a -mlAo,. Portanto,se hace caso omiso de los efectos de Fe, -14a, y ·-m.Ao. Al tomar momentos en torno a A se obtiene(3)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 463/508
FUERZAS DINÁMICAS 471Se encuentra que los dos primeros términos sonyRG¡A x (-m3AG¡) 18.6k-13a3 -0.012(-1 l9k) = 1.43kLa fuerza F73 se torna a lo largo de la recta 04B. Por tanto,
EntoncesF73 = F..JL56.4° = (0.5531 + 0.833j)F..3RBA X F73 = 134F23kDespués de sustituir estos tres términos en la (3) y resolver, da FlJ = -0.149 kN. De donde,F73 -0.149/56.4° = -0.082 41 - 0.1241 = 0.1491236.4° kNA continuación, sumando las fuerzas sobre el eslabón 3 y resolviendo para F..l , daEl tercer paso del análisis es encontrar las sumas vectoriales de las fuerzas F' yY' , en A, B Y04 En A se tieneEl resultado esAsimismo,
A continuaciónF13.= -0.2251 - 0.237j = 0.327/226S kNFn -F23 = 0.2251 +0.237j 0.327/46S kNResolviendo esta ecuación se obtiene F43 y F34 comoEn 04 se tieneLa solución esF4l = 0.2961+ O.OO4j 0.296/0.8° kNF34 -0.2961 -O.OO4j 0.296/180.8° kNFI4 -0.0 169i + 0.389j = 0.389/92S kNPara el eslabón 2, se tieneFI2 -F12 -0.2251 - 0.2371 0.327/226.5° kNDel mismo modo,Al resolver. da

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 464/508
472 TEOR1A DE MÁQUINAS Y MECANISMOS13-10 FUERZAS Y MOMENTOS DE SACUDIMIENTOPara el disefiador las fuerzas transmitidas al marco o a base de la máquina, debidasa la inercia de los eslabones en movimiento y otros elementos de la misma,tienen un interés especial. Cuando estas fuerzas varían en magnitud o dirección,
tienden a sacudir o a hacer vibrar la máquina y, en consecuencia, esos efectosreciben el nombre de fuerzas y momentos de sacudimiento.Si se considera un eslabonamiento de cuatro barras como ejemplo, suponiendoque los eslabones 2, 3 y 4 son los elementos móviles y el eslabón 1 es el marco,las fuerzas de inercia asociadas con los elementos en movimiento son -m2A..,-m3Aa¡, Y -m..G4' Tomando a los elementos móviles como un cuerpo libre, sepuede escribir inmediatamenteUtilizando F s como la fuerza resultante de sacudimiento, se tieneFs = F21 + F41Por tanto,Para determinar el momento de sacudimiento se escribeL MOz Ro! x (-m2A..) + Ra¡ x (-m3Ao3)
(a)(b)(13-35)+ R040z x (-m4AO.)-12a2 - 13a3 140.4 + M12 = O (e)EntoncesMs == M21 = -(R.. x m2A.. + Ra¡ x m3AG:J + R040zx m4Ao4 + 120.2 + 130.3. + 14CX4)13-11 ANALISIS POR COMPUTADORA(13-36)En esta sección se presentan los pasos necesarios para obtener una solución generalen computadura o calculadora programable para la cinemática y dinámica delmecanismo de cuatro barras. El procedimiento que se presenta aquí probablementeno sea la solución óptima porque casi cMa programador enfoca el problema de
una manera diferente. Sin embargo, se puede usar el programa como una guiapara problemas más complejos y con el fin de generar ideas. Este programa hasido verificado usando la calculadora programable Texas Instrument TI-59.Las ecuaciones se presentan sin desarrollarlas; todas están basadas en los fundamentosque ya se cubrieron en esta obra. Puesto que hay demasiadas ecuaciones,se presentan en forma de texto, más que desarrolladas, para ahorrar espacio.Se recomienda que, en un análisis en computadora, se utilicen siempre unidadesbásicas. Por tanto, si se emplean unidades gravitacionales ips, las fuerzas y

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 465/508
FUERZAS DINÁMICAS 473B¡"igura 13-17los pesos deben expresarse en libras-fuerza y las dimensiones en pulgadas, tomandog = 386 pulg/s2 Si se emplean unidades SI, las fuerzas deben darse en newtons,
las masas en kilogramos y las distancias en metros. Los resultados se puedenexpresar siempre utilizando prefijos tales como kilo O mili, al terminar el programa.La notación que se utilizará es la acostumbrada y la mayor parte de ellaaparece en la figura 13-17. Hay tres subrutinas que son necesarias y que se debenprogramar primero; éstas son A x B = (XAYB YAXB)k, una rutina bidimensional deproducto vectorial, F C ',(82) + '2(83), Y FD = '3{(2) + fi84). Las dos últimas se deben plantear basándose en el enunciado original del problema, y es probable quecambien de un problema a otro.Se necesitan tres tipos de almacenamiento, el permanente para los valores
iníciales o dados, uno temporal para ciertos términos que aparecen con frecuenciay se utilizan durante los cálculos y luego se desechan y otro permanente para todaslas respuestas de interés.Almacenamiento inicial permanente Almacénense 82, &82, rl, '2, '), '4. R..A,Ro RCA, Rl), a, (Je, (Jl), (3, W2, m), m4, 13, e h Nótese que &'Jz es el incrementoenel que se avanza la manivela después de cada solución.Almacenamiento temporal Os, 's, t/I, /F;41, IF..I, .. (A x B), XA, YA, XB, YB. Es probableque también se desee almacenar otras cantidades temporalmente, comopor ejemplo los argumentos de los términos trigonométricos que se presentancon frecuencia.
Almacenamiento permanente final 83, 64, w3. W4, a3, 0'4, Aó" A.." Aó., A..4' Pz:,F.., FÍ>, Fb, Fh, F..3, F34, F..4, F14, Fi4' T2 Paso 1. Ecuación (1), " + 's cos 65 = r2 cos 62; ecuación (2), r5 sen 65 '2 sen 62 Resuélvase para O.. y 'j. Obsérvese que '2 sen (}z y '2 cos f}z - " forman los

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 466/508
474 TEORíA DE MÁQUINAS Y MECANISMOScatetos de un triángulo rectángulo en donde se toma a rj como la hipotenusay a 05 como uno de los ángulos. Si el problema se está resolviendo en calculadora.úsese la tecla de conversión polar-rectangular para obtener 85 y rj.Paso 2. Resuélvase la ecuación (3), !/I cos-'[(d + rJ - d)/2r3rS].Paso 3. Resuélvase la ecuación (4), Á = cos-1[(rs - r3 cos !/I)/r4] ; la ecuación (5) ,
8" = 8s - Á. y 83 = !/I + 85 180.Paso 4. Resuélvase la ecuación (6), ú13 = [r2w2 sen ( 02 - (4)J/[r3 sen (84 - (3)].Paso 5. Resuélvase de la ecuación (7), W4 [r2w2 sen ( 82 - (3)]/[r4sen ( 94 - (3)].Paso 6. Resuélvase la ecuación (8) , a3 [r2w.. cos (92 - (4) + r3w5 cos (93 - (4)- r4w¡]! [r3 sen ( 84- (3)],Paso 7. Resuélvase la ecuación (9) a4 = [r2w.. cos ( 82 - (3) - r4w¡ cos ( 03 - (4)+ r3Wm f r4 sen ( 84 - (3)].Paso 8. Resuélvase la ecuación (lO) , AbJ = r2w.. cos (02 + 180) + Ra,Aa3 cos (83 +a+ 90) + RGJAW.. cos(63 + a + 180).Paso 9. Resuélvase la ecuación (11), A.. = r2w.. sen ( 82 + 180) + ..Aa3 sen( 63 + a
+ 90) + R..AW.. sen (63 + a + 180).Paso 10. Resuélvase la ecuación ( 1 2), Abó = Ro4a4 cos ( 64 + (3 + 90) + Ro.w¡ COS(84 + (3 + 180).Paso 11. Resuélvase la ecuación (13), A..4 = R04a" sen (84 + (3 + 90) + R04Wa sen (84+ (3 + 180).Este paso pone fin al análisis cinemático.Paso 12. Resuélvase la ecuación (14), IF..I = /I (A x B)IIIRB x F..I, en dondeI (A x B) = RG4 x m.AG4 - RD x F D + 14et4, y F.. = cos 831 + sen O)J.Paso 13. Resuélvase la ecuación (15), F..4 = -F.. + m.Ao4 - F1)oPaso 14. Resuélvase la ecuación (16), IF..I = II (A x B)I!/RBA x F..I. en dondeI lA X B) = ..A x (-m3A.. + RcA x Fc 13et) y F.. cos 9.1 + sen 84j.Paso 15. Resuélvase la ecuación (17), F.. = F.. cos lh + F.. cos 8 . F.. F.. sen (h
+ F.. sen 84; Eq. (l8), Fi4 = -F.. COS 83 - F.. cos 84, Fi. -F.. sen (hF.. sen8 .Paso 16. Resuélvase la ecuación (19), F23 -Fe + m3Aa, - F43 Paso 1 7. Resuélvase la ecuación (20), T 2 = r2 x F23 Paso 18. Resuélvase la ecuación (21), 62 = (h + Ll62, Y regrésese al paso 1 .PROBLEMAS13-1 La palanca angular de acero que se ilustra en la figura se usa como un seguidor oscilante para leva.Hállase el momento de inercia de la masa de la palanca en tomo al eje que pasa porO. Úsese wO.282 1b/pulgl como peso unitario del acero.13-2 Una barra .de acero de 5 por-50 por 300 mm tiene dos discos de acero redond
os cada uno con 50mm de diámetro y 20 mm de longitud, soldados en uno de los extremos, como se indica. Se hace una
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 467/508
FUERZAS DINÁMICAS 475Problema 13-1Problema 13-2 Dimensiones enmilímetros.perforación a 25 mm del extremo. Calcúlese el momento de inercia de la masa de esteconjunto, en torno
a un eje que pase por la perforación. La densidad de masa del acero es 7.80 Mg/m3 13-3 Hállese el momento de torsión externo que se debe aplicar al eslabón 2 del mecanismo ilustrado enla figura para impulsarlo a la velocidad dada.3Problema 13-3 OzA = 3 pulS, AG3= 4 pulS, AB = 8 pulg, ...G.= 3 pulg, 0.8 = 6 pulg, 020.= 7 pulg, (¡}2 = lsok cad/s, W3= 0.708 lb, W. 0.780 lb, 13 =0.0154 lb . S2 . pulg, l. = 0.01 12lb · S2 . pulg, IXl = O rad/s2, IX)
=495ok rad/s2. 1X4 = -89OOk rad/s2Aa, = 6320i + 750 ¡ pie/s2,AG. = 2280l + 750} pie/s2.13-4 El eslabón 2 del eslabonamiento de cuatro barras que aparece en la figura estáequilibrado. Para lavelocidad angular dada del eslabón 2, calcúlense las fuerzas que actúan en cada articulación de pasadory el momento de torsión externo que se debe aplicar al eslabón 2.13-5 Para la velocidad angular dada de la manivela 2 de la [¡gura, encuéntrense lasreacciones en cadaarticulación de pasador y el momento de torsión externo que se debe aplicar a la manivela.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 468/508
476 TEORÍA Db MÁQUINAS Y MECANISMOSBAProblema 13-4 02A 2 pulg, AG) z: 8.50 pulg,AB = 1 7 pulg, 04G. 4 pulg, O,B 8 pulg,020. = 1 3 pulg, (1)2 = 200k rad/s , W3 2.65 lb,
W. = 6.72 lb, 11 = 0.0606 lb · S2 . pulg, l. =0.5 3 1 lb · 52 . pulg, a2 O rads/s2, al =-6530k rad/s2, a4 = -24Ok rad/s1, Aa, =-31 601 + 262j pie/52, AG. = -800i 2 1 10j pie/52....-------- --------------------=...--- xProblema 13-5 02A 3 pulg, AG) = 4.5 pulg, AB = 12 pulg, (1)2 = 210k rad/s, ro; =-37.7krad/s, a2 = O rad/s2, a3 = 7670k radls2, Ac" -78201 - 4876j pie/s2, AH -7850f pie/s2,W3 3 .40 lb, W. 2.86 lb, 13 0. 1085 . S2 . pulg.13-6 En la figura se presenta un mecanismo de motor con una fuerza externa FH aplicada al pistón.
Para la velocidad dada de la manivela, calcúlense todas las reacciones en los pasadores y el momento detorsión de l a manivela.Problema 13-6 02G2 1 .25 pulg, OlA 3 pulg, AG1 = 3 . 5 pulg, AB = 12 pulg, 002 =l60krad/s, 1<)1 -35k rad/s, a2 = O rad/:s2, a) = -3090k rad/ 52, A(;, 2640LJ50° pie/ s" AG,= 6 1 30/158.3° pie/s2, AH 6.280/ 1 80° pie/s2, W2 0.95 lb, W, 3 . 50 lb, W, 2 .50 lb, 1,0.003 69 lb . 52 . pulg, 11 0. 1 1 0 lb . 52 pulg, F B = 800/1 80° lb.13-7 Los siguientes datos, todos en unidades básicas SI, pertenecen al eslabonamiento de cuatro barrasque aparece en la figura de este problema: r, = 0.9, r2 = 0.3, r, 1 .5. r. = 0.8
. AG, = 0.65. O.G. =0,45. AC 0.85. O.D 004, a = 16°, Oc 33°. {3 = 17°. liD = 53°, m, 65 .8, m, 2 1 .8. 1, =4.2. 1,0.5 1 .El eslabón 2 está balanceado. Un análisis cinemático realizado para 11, = 60° Y W2 1 2 rad/s da11, 0.7", (l. 20.4°, a, = -85.6 rad/s', a. = 1 72 rad/s", A(" 96,4/259° mIs', y AG497.8/270°mIs".Hágase un análisis dinámico completo y calcúlense todas, las reacciones en los pasadores, asi como elmomento de torsión que se debe aplicar al eslabón 2,

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 469/508
FUERZAS DINÁMICAS 477exProblema 13-713-8 Repítase el problema 1 3-7 si en el punto D actúa una fuerza externa F D = J 2/00 kN
13-9 Hágase un análisis cinemático y dinámico completo del eslabonamiento del problema 13-7, ud"!izando los mismos datos, pero con (l¡ = 170°, W2 = 12 radls, y una fuerza externa FD = 8.94163.4° kN.13-10 Repítase el problema 1 3-9 utilizando, 82 = 200", W¡ = 12 rad/s y una fuerza externa Fe8.49..kN.13- 1 1 Para (l2 2700 Y W¡ = 1 8 rad/s, un análisis cinemático del eslabonamiento cuyageometría esla que se describe en el problema 1 3-7, da O, 46.6°, O. 80S, a, - 1 78 rad/s2, a.-256 rad/s2,AG, .. 1 1 2/22.7° m/s2, AG4 J 19/352S m/52 Una fuerza externa Fo 8.60/2 1 5.5° kN ac
túa en el puntoD. Hágase un análisis dinámico completo del eslabonamiento.13-12 Los siguientes datos se aplican al eslabonamiento de cuatro barras ilustrado para el problema1 3-7 : '1 300 mm. '2 = 1 20 mm, r, = 320 mm, r4 = 250 mm, AG, 200 mm, 04G4 ", 125 mm,AC 360 mm, O.D = O, a 8°, (le 15°, (3 = 80 O.El análisis cinemático en (); = 90° Y W2 = 32 rad/s dio los siguientes resultados: ih= 23.9°, 04 =9 1.7", al 22 1 rad/s2, a. = 1 22 rad/s2, AG, = 88.6/255° m/s2. y AG4 = 32.6L244° m/52.Asimismo m) = 4 kg, /¡ = 0.0 1 1 kg ' 52 m, m. = 1 .5 kg, e l. = 0.0023 kg . 52 m.
Suponiendo que se usa una fuerza externa Fe = 632/342° N, hágase un análisis dinámico completo delsistema.13-13 Repítase el problema 1 3- 1 2 8¡= 26O°. Anailcense tanto la cinemática como la dinámica del sistemaen esta posición.13-14 Repítase el problema 1 3 - 1 3 si (J¡ 3000.13-15 Analícese la dinámica del eslabonamiento excéntrico de corredera y manivela ilustrado en lafigura, aplicando los siguientes datos: 82 1 20°, a 0.06 m, r2 0. 1 rn, ') 0.38 m,AC = 0.4 rn,AG) = 0.26 m, úiz - 18 rad/s, a = 22°, (le = 32°, m) 7.4 kg, m. = 3.2 kg, 13 = 0.0 1 3
6 kg · S2 . m, Fe=- 10001 N , Ff. -20001 N. Supóngase que la manivela está balanceada y no hay fuerzasde fricción.Problema 13-15

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 470/508
478 T EORIA DE MÁQUINAS Y MECAN ISMOS13-16 A nalícese el sis tema del problema 13-15 para una rotación c ompleta de la manivela. S upóngaseque Fe O y Ff4 - 1000 N cuando x es positiva, y Ff. O cuando i es negativa. S upóngase que lamanivela está equilibrada. Hágase una gráfica de T2 y F..4 c ontra (h.
13-17 Un eslabonamiento de corredera y manivela similar al del problema 13-15 tiene una excentricidadc ero y r2 = 0. 10 m, ') 0.45 m, AC "" O, AG3 = 0.20 m, W2 = -24 rad/s, a = Be =0, m¡ = 3.5 kg,m. 1.2 kg, 13 = 0.060 kg . 52 m y 1; =60 N . m. Correspondiendo a 82 '" 135.., un análisiscinemático dio ('h = -9.0°, a3 = 89.3 rad/s2, x = 0.374 m, i = 40.6 m/s2 y Aa, = 4O.6í - 22.6j m/S2.Determinense FI4 y F23 s uponiendo que el eslabón 2 está equilibrado.13-18 Repltase el problema 1 3-17 si 8. 240". L os resultados de un análisis cinemátic o s on: 83 = 1 1. 1°,al = - 1 1 2 rad/s2, x 0.392 m, x = 35.2 m/s', Aa, 3 1 .61 + 27.7j m/sz.
13·19 Un eslabonamiento excéntrico de corredera y manivela, como el del problema 1 3-15, tiene a =0.08 m, rz = 0.25 m, ') 1.25 m, AC = 1.0 m, AG3 = 0.75 m, W2 6 rad/s, a = - IS",lle = -3S", m¡ =1 40 kg, m4 50 kg Y 1) = 8.42 kg . 82 m. H ágas e un análisis c inemático y dinámico completo deeste s is tema cuando fh 25° con Fe = MOl-60° kN y Ff. = -50 kN. S upóngase que la manivelaestá balanceada.13-20 L as maniv elas 2 y 4 del eslabonamiento cruzado que aparece en la figuraestán balanceadas. Lasdimensiones del eslabonamiento s on: 02A 6 pulg, AB = 1 8 pulg,AG 12 pulg, AC =24 pulg, 0204
1 8 pulg Y 0.8 = 6 pulg. Correspondiente a la posición que s e muestra y con "'2 =10 tad/s, un análisiscinemático dio los resultados WJ - 1 .43 rad/s, W4 = - 1 1 .43 rad/s, a3 a. = 84.7rad/s2 Y Aa, =47.61 + 70.3j pie/52 También W) 4 1 b, 13 0.497 lb . S2 . pulg e 14 = 0.(l63 Ib . 82 pulg. S i Fe =-301 lb y el eslabón 2 es el impulsor, enc uéntrese el momento de torsión impulsor y las reaccionesen los pasadores.e Problema 13 .. 2013-21 Calcúlese el momento de torsión impulsor y las reacciones en los pasadores para el mecanismo del
problema 1 3-20, si la manivela 4 es el impulsor.13-22 Un análisis cinemático del mecanismo del problema 13-20, cuando (h = 21 0° , diofh 1 4.7°,04 1 64.7°, W3 = 4.73 rad/s, W4 -5.27 rad/s, a3 = a4 - 1 0.39 rad/s2 y AG1 = 26/20.85° pie/s2 CalcúlenseT2 y las reacciones en los pasadores para esta fase del movimiento, usando la misma fuerza Fedel problema 1 3-20.13-23 L a parte (a) de la figura muestra un eslabonamiento con un acoplador prolongado que tiene unafuerza externa Fe que actúa durante una porción de la carrera. Las dimensiones del eslabonamientoson: 02A 16 pulg. AG3 = 32 pulg, AB 0204 40 pulg, 04G. = 20 pulg y 048 56 pulg.
Hágaseun análisis cinemático y dinámico para una rotación completa de la manivela, con W2 = 10rad/s y Fe =
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 471/508
-sooi + 866J lb para 90° s 1/2 S 3000 s uponiendo que Fe = O para los otros ángulos.Úsese W3 222lb, W. = 208 lb, 13 = 226 lb . S2 . pulg, 14 = 264 lb . S2 pulg y s upóngase una manivela balanceada.13-24 En la parte (b) de la figura se ilustra un motor engr anado a un eje en elque está montado unvolante. Los momentos de inercia de las piezas s on corno siguen: volante, 1 = 2
.73 1b . S2 pulg; ej e del

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 472/508
FUERZAS DINÁMICAS 479volante, 1 "" 0.0155 lb . S2 . pulg; engrane, 1 "" 0.112 lb . S2 pulg. S2 . pulg; pifión, 1 = 0.003 49 lb . S2 pulg; motor , 1 = 0.0864 lb . S2 pulg. Si el motor tiene un momento de torsión dearranque de 75 lb .pulg, ¿cuál es la aceleración angular del eje del volante en el instante en que se cie
rra el interruptor delmotor?Problemas 1.3-23 y 13-24
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 473/508
RESPUESTAS DE PROBLEMAS SELECTOS1-3 )'rnín= 53°; )'rnóx= 98°; en (J = 40", )' = 5..; en (J = 22.., )' = 90"l-S (a) m = 1; (b) m = 11-7 Q = 1.102-1 Espiral2-3 Rop = -7i - 14j
2-S ARA = -4.5ai2-7 En el mismo sentido del movimiento de las manecillas del reloj; R = 4/0°; t =20; AR = 404/0°2-9 ARl') = -2.12L + 3.88j,; ARl')/2 = 3122-11 ARo = 1.9Oi + 1.10j = 2.20..2-13 R.. = 2.50 cos (J2 + v'36.75 + 6.25 cos.. (J23-1 R = 314/162°. pulg/s3-3 V BA = V B", = 57.7/334° mi/h3-S a) d = l40mm; b) VAB = -60 mIs; VBA = 60 mis; lIl2 = 200 rad/s mmr3-7 a) Una recta en N49°E; b) sin cambio3-9 ro3 = 1.43 rad/s cmr; ro. = 15.4 rad/s cmr3-11 Ve = 22.5/284° pies/s; ro3 = 0.60 rad/s cmr
3-13 Ve = 0.402/151° mIs; VD = 0.290/249° mIs3-1S Ve = 4.771!lff mIs; ro3 = ro. = 22 rad/s cmr3-17 ro6 = 4 rad/s cmr; V B = 0.963/180° pies/s; Ve = 2.02/208° pies/s; VD = 2.01/205° pies/s3-19 ro3 = 3.23 rad/s cmr, VB = 16.9/-56° pies/s3-21 Ve = 9.03/138° mIs3-23 VB = 35.5/240° pies/s; Ve = 40.9/267° pies/s; VD = 31.6/-60° pies/s3-2S V B = 1.04/-23° pies/s3-27 ro3 = ro. = 14.4rad

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 474/508
RESPUESTAS A PROBLEMAS SELECTOS 5913-29 ro3 = 1.61 rad/s mmr3-31 VE = 10.0/221° pulg/s, Verad/s mmr; ro6 3.69 rad/s mmr3-33 ro) = 30 rad/s mmr4-1 -4í pulg /S2
11.6/-57" pulg/s; ro34-3 T O.300í 0.954,; A" 0.437 m/s2; A' 0.354 mls2; P = 405 mm4-5 AA = -72001 + 2400j m/s23.30 rad/s cmr; ro..4-7 V B 12/270° pies/s; Ve 8.4OM pies/s; AB = 392/165° pies/s2; Ae = 210/240° pies/s24-9 V B = 74.5/90° mIs; AB lOO 000/90° m/s2; ro2 = 386 rad/s cmr; al = 557 ooorad/s2emr4-11 a} = 563 rad/s2 cmr; a, = 124 rad/s2 emr4-13 Ae = 3056/113° pies/s2; al = 1741 rad/s2 emr; IX. = 3055 rad/s2 emr4-15 Ac = 2610/-69" pies/s2; a. = 1494 rad/s2 emr4-17 A8 = 16.7/0° pies/s2; a) = 17.5 rad/s2 emr; a¡,4-19 al = 4180 rad/s2 mmr
4-21 Ae 450/-I04°m/s2; al 74.1 rad/s2mmr4-23 AB = 2440/240° pies/s2; Av 4030/120° pies/s210.8 rad/s2 mmr2 5.04-25 ()¡ 15S; 8. = -8.99°; ro) = 47.6 rad/s cmr; ro. = 70.5 md/s cmr; al = 3330 rad/s2 cmr;IX4 = 32 00 rad/s2 ecw4-27 8l = 2 8. 3°; 8. 55.9°; ro) 0.633 rad/s mmr, 1.1), 2.1 6 rad/s mmr; al 7.82 rad/s2 cmr;a. = 6.70 rad/s2 emr4-29 fl¡ 38. 4°; 8, 156°; 1.1)3'" 6.85r ad/s mmr; ro,= 1 .24r ad/s mmr; al"" 62.5 rad/s2 cmr;a.= % .5r ad/s2 mmr
4-31 Ve = 184/-19" pulg/s; AB 2700/- 172° pulg/s2; 1.1), = 6.57 rad/s mmr; IX. 86.4 rad/s2 cmr4-33 A... 24 20010" pies/ S24-35 AB 197/-36°pies/s2;a.=45.9rad/s2emr4-37 Ap,= 2 14/%° m/s24-39 Ae. 901/269" pulg/s2; a. 6 rad/s2 cmr4-41 Aa 140/74° pulg/s2; as 320 rad/s2 mmr; a¡, 42.3 rad/s2 mmr6-3 Cara 150 mm desde el pivote6-5 y'(f3/2) = ?TL/ 2P ; y"'(f3/2) -?T1L/2pl; y"(Q) = ?T2L/2fj2; y"(¡;) = - ?T2L/2p26-7 AB: detención, L¡ = O, p¡ 60.0°; BC: movimiento armónico modificado de subida completa,
ecuaciÓn (6-20), L2 2.5 pulg, 132 = 60.0°; CD: movimiento de medio retorno semiarmónico,ecuaciÓn (6-26), LJ 0.042 pulg, 133 = 3.96°; DE: movimiento uniforme, L4 = 1.0 pulg,{3460.0°; EA: movimiento de medio retorno semicicloidal, ecuaciÓn (6-31), L5 = 1.48 pulg, 135174.04°6-9 tAB 0.025 s; Ymflx = 200 pulg/s; Ymln -40 pulg/s; Ymflx = 21 300 pulg/s2; Ymln = -38 lllO pulg/S26-11 Ymflx= 4L9rad/s; .vmln= -44.9rad/s; Ymáx= 7900 rad/s2; Ymln= -6840rad/s26-13 Ancho de cara = 2.20 pulg; Pmln = 2.50 pulg6-15 RQ> 19.7 pulg; ancho de cara> 6.24 pulg
6-17 <Pmáx= 12°; R, <4.5 pulg6-19 Ro>50mm; Ymáx=37m/s2

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 475/508
592 TEORIA DE MÁQUINAS Y MECANISMOS6-21 Ro> 65 mm; Ymáx= 75 m/s26-23 u (Ro+Rc+ y)sen(J+y'cos(Jv=(Ro+Re+y)cosfJ y'sen(JR = V(Ro + Re + y)2 + (y')2'" .. - fJ tan -1 -::;--";;;; ,---
2 +y7-1 160 dientes por pulgada7-3 2 mm7-50.8976 dientes por pulgada, 44.563 pulg7-7 12.73 mm, 458.4 mm7-9 9.19 pulg7-11 17 dientes, 51 dientes7-13 a = 0.25 pulg b = 0.3125 pulg, e = 0.0625 pulg, P:..= 0.785 pulg, 1 = 0.392pulg, dbz = 5.64pulg, db, = 8.46 pulg, u. 0.62 pulg, u, 0.585 pulg, me 1.635, Pb = 0.737 pulg7-15 qa 1.07 pulg, q, 0.99 pulg, q, = 2.06 pulg, me = 1.647-17 me = 1.56
7-19 a) qa = 1.54 pulg, q, = 1.52 pulg, q, = 3.06 pulg, me = 1.95; b)me 1.55; sin cambio en el ángulode presión7-25 lb = J7.14mm. ta =6.74mm,iPa 32.78°7-27 th = U46 pulg7-.. lb 0.1620 pulg, ta 0.0421 pulg, iPo 35.3°7-31 a) D 0.182 pulg; b) 9.8268 pulg7-33 me = 1.3457·35 me 1.7707·37 a3 = 1.343 pulg8-1 P, 0.523 pulg, P. 0.370 pulg, p. = 8.48, d2 = 2.5 pulg, d3" = 4 pulg, 42.4,67.88-4 P, = 6.93, P, 0.453 pulg, N2 17, N¡ = 31, d2 = 2.45 pulg, d) 4.48 pulg
8-7 m. = 1.79, mI = 2.878-10 N2 = 30, N3 60, "'2 "'3 = 25° de mano izquier(}a, (d2 + d})!2 9.93 pulg8:131 = 3.75 pulg, Á = 34.37°, '" = 34.37°, d] 15.90 pulg8-16 27°, 93°8-18 d2 = 2.125 pulg, d) = 3.500 pulg, 12 = 34.80, 1} = 70.2°, a2 0.1612 pulg, al= 0.0888 pulg,F = 0.559 pulg9-1 ns = 68.2 rpm mmr, e = -5/889-3 n9 11.82 rpm mmr9-5 Una soluc ión: NJ = 30 dientes, NA = 25 dientes, N5 = 30 dientes, ·N6 = 20 dientes, N1 25dientes, Ng 35·dientes, NIO 35 dientes; las velocidades de salida son 200, 214, 32
2 Y 482 rpm9·7231 rpm crnr9-9 645 rpm crnr9-11 nA = -(5/22)n2 o en dirección contraria; sustitúyanse los engranes 4 y 5 con unsolo engrane9-13 a) 84 dientes, 156 mm; b) nA 6.77 rpm cmr9- 15 a) nR = 625 rpm, nL 695 rpm,; b) nA 674 rpm

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 476/508
RESPUESTAS A PROBLEMAS SELECTOS 59310-1 Para seis puntos, 0.170,1.464,3.706,6,6.294,8.356 Y 9.83010-3 Solución típica;'2 7.4 pulg" 3 20.9 pulg, e = 8 pulg10-5 Solución típica; rJ 7.63 pies,'2 = 3.22 pies, r3 = 8A8 pies10-7 Solución típica: O2 en x -1790 mm, y = 320 mm; '2 = 360 mm, '3 = 1990 mm10-9'1 = 12 pulg, r2 = 9 puIg, r3 = 6 pulg, T. = 9 pulg; el asiento se cierra en
posición abierta o devolquete que es un triángulo 34-510-13 Y 10-23 r21rl = -3.352, r3/rl 0.845, r.lrl = 3.48510-15 Y 10-25 rz/TI -2.660, '3/'1 = 7.430, rJrl 8.68510-17 Y 10-27 '21Tl = -0.385, rJlT, = 1.030, T./rl = 0.38410-19 Y 10-29 r2/rl 2.523, '31rl = 3.329, "/'1 = -0.55610-21 Y 10-31 rJr¡ = -1.606, r3/TI = 0.925, ,Jrl = U0711-1 m = 2, incluyendo una libertad no esencial11-3 b>l = -2.58J rad/s : WJ = 1.J61 +0.67k rad/s; Vs = -961 50j + 168k mm/s11-5 RSA = 51 + 91 -7kpulg; V A = 180jpulgls; V 8 = -231k pulgls; w} = -21.561 +7.45j - 5.8k rad/s;w" -25.71 rad/s; AA = 10 8001 pulg 152; As -59501 - 3087k pUlg/s:; Ot} -4471 + 5
88j + 436krad/s2;0:" = -3431 rad/5211-7 6.0. = 48°, razón de tiempo = 111-9 t...8. = 71°, razón de tiempo 1.2211·11 VA = -2.34f - 1.35j mIs; V B 0.121 +0.23k mIs; (0)3 = 10.41 1O.7j + 3.3k rad/s;(0)4 = 19.5f rad/s; AA 48.61 - 84.2j m/s2; As = -50j + 122k m/s2; 0:3 = 1751 - 1111 + 10lk rad/s2;o:. = 3281 rad/5211-13 V A 121 + 20.81 + 41.6k pulg/s;V s =1 3.81 pulg/s; CdJ 2.311 + 6.661 3.23krad/s11-15 a) m = 1; b) t...(J4 = 90° t...Rs = 8 pulg; e) Rs 8.32J pulg; RBA = 41 + 10.
9) 3.06k pulg12·3 P = 1460 N12-5 P 442N12-7 M,z=-276 I b ' pulg; F34= 338..lb;F14 231/242.1° lb12-9 FI4 = 318/-61.7° lb; F34 = 190/88.4° lb; F23 228/56.6° lb; M12 -761 lb . pulg12-11 Fuerzas en el eje (árbol): a) FI3 2520& lb; b) Fn = 1049/225° lb; e) Fu = 2250/-45° lb12·13 Fe = 216/189" lb; FD = 350/163° lb12-16 a) FA(radial) 5701b; FA (empuje) 851b12·17 FE 1631 -192j + 355k lb; F F = 110j + 145k lb12-19 F23=306/230.4°kN; F34=387..kN; FI4=387..kN12·21 MIZ = 437 lb . pulg
13-1 lo 0.0309 lb· S2 pulg13-3 Tz = -l90k lb· pulg13-5 FI4 = 300/-90° lb; F34 = 755.. lb; FJ2 1535t::L.2L lb; Tz = 2780k lb· pulg13-7 Tz -2950kN · m; FI4= 11.7/205° kN; F34 =1 1.0/14.8° kN;F 1z =F 23 9.98/-200 kN13-9 Tz 674kN· m; FJ4=6.98..kN; F34=4.37..kN; F23=2.59/2300kN13-11 T2 = 4400k N· m; F14 = 7.57..kN; F34 14.4/56." kN; F23 20.9/45.4°kN13-13 0:3 = 200 rad/s2 mmr; T2 = IUk N· m; F14 = 689/47.2° N13-15 T2= -241kN' m; Fi. 646 N; F23=31901- 705jN13-17 FI4 = 5461 + 397j N; F23 = -3721 - 476j N13-19 T2 9750k N· m; Fi. = 22.1 kN; F23 = 8.421 +47j kN

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 477/508
594 TEORIA DE MÁQUINAS Y MECANISM OS13-21 T4= +22.4k lb· pulg; F23= 6.80/24(}·lb; F4l= 45.6/78.2°l b13-23 En 82 = O', Ih = 120°, 84 = 141.8°, «)3 6.67 rad/s mmr, «)4 = 6.67 rad/s mmr, «3 141 rad/s1 mmr, «4 = 64.1 rad/s2 mmr, Tz = 7468k Ib'pies, FZ1 6734/-56° lb, Y F 41 = 7883/142.8· lb
14-1E n X 30070, Pe 251 Ib/pulg2 , Pe 501b/pulg114-3 Ver figura14-5 F41 = -230 lb, F34 935 lb, F32 9411164·1b, T2J 800 lb· pulg14-9 F4J -0.52kN, F34 3.19..kN, FJZ= 1 0.2/-38.4°k N, TZJ 191N · m14-11En 6)t=6O", X= 28.407o,P 26001b,.i'=-33.6(I0)3 pulg/s2,F41 -392lb,F34=2520/-8.9"lb,F12= 2460.Q1iS." lb, T21 =3 040 lb . pulg15·1 FA = 64.7/76.10kN, FB = 16.2/76.1°kN, me = l.64k g15-3 FA = 8.06/-14.4° lb. FB = 2.68/165.5" lb, We = 2.63 lb en 8e = -14.4°15-5 FA = 13.l56M kN, FB = O15-' mLRL = 5.98/-16.5° oz' pulg , mRRR = 7.33/136.8° oz' pulg15-9 Su prímase m¡RL = 782.1/180.4° mg . m y mRRR 236.8/301.2° rng . m
15-11 Véase la secci6n 15-8 para obtener las respu estas16-1 ligo16.3 189 rpm16-5E l salto principaría en 8= 75° cu ando ji se hace negativa; n = 242 rpm16-7 21.8 rad/ s16-9 En8 120°, =-572N, T=4.04N·m;en8=225°,F..2=-608N, T -3.87N·m16-11 8 = 59.99", F;2 -278 lb, T = 332 lb . pulg; 8 255°, -139lb, T = -l04lb . pulg8!. ::¿-o'lO fQ..
9t8-. 76543210 20 30 40 50 60 70 80 90 100Desplazamiento del pist6n X porcentaje Respuesta del problema 14-3

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 478/508
APÉNDICE)Tabla 1 Prefijos estándar del SI t.*Nombre Simbolo Factorexa E 1 000 000 000 000 000 000 1018peta P 1 000 000 000 000 000 1015
tera T 1 000 000 000 000 1012giga G 1000000000 H)9 mega M 1000000 1{)ókilo k 1000 1()lhecto§ h 100 1Q2deka§ da 1 0 101deci§ d 0.1 10-1centi§ e 0.01 10-2mili m 0.001 10-3micro ¡¡. 0.000001 10..nano n 0.000 000 00 1 10-9pico p 0.000 000 000 00 1 10-12femto f 0.000 000 000 000 00 1 10-15
ato a 0.000000000000000001 == 10-18§ No se recormenda pero se encuentra a veces.t De ser posible, úsense prefijos de múltiplos y submúltiplosen pasos de 1000. Por ejemplo, especifiquenselas longitudes en milimetros, metros o kilómetros. En unaunidad de combinación, utilícense prefijos sólo en elnumerador. Por ejemplo, úsense meganewton por metrocuadrado (MN/m2), pero no newton por centlmetrocuadrado (N/cm.. tampoco newton por milimetro cuadrado(N/mm2).t En el SI se prefiere emplear espacios, en lugar decomas, para agrupar los n úmeros, con el fin de evitar confusionescon la práctica de algunos paises europeos de usar
comas en lugar de puntos decimales.

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 479/508
596 TEORÍA DE MÁQUINAS Y MECANISMOSTabla 2 Conversión de unidades usuales en Estados Unidos a unidades del SIMultiplíquese porPara convertir de a Exactot ComúnCaballo de potencia (hp) watt (W) 7.456999 E + 02 746Libra fuerza (lb) newton (N) 4.448 222 E + 00 4.45
Libra masa (lbm) kilogramo (kg) 4.535 924 E -01 0.454Libra'pie (lb' pie) newton-metro (N'm) l.355 818E+00 1.35joule (J) 1.355 818 E + 00 0.113Libra-pie/segundo (lb'pie/s) watt 8W) l.355 818E+00 1.35Libra-pulgada (lb'pulg) newton-metro (N'm) 1.128 182 E 01 1.35joule (J) 1.128 182 E -01 0.113Libra-pulgada/segundo (Ib'pulg/s) watt (W) 1.128 182 E -01 0.113Libra/pie2< (lb/pie2): pascal (Pa) 4.788 026E+OI 47.9Libra/pulgada2 (lb/pulg2) pascal (Pa) 6.894 757 E + 03 6890Milla, terrestre E.U. (mi) metro (m) 1.609 344 E + 03* 1610Pie (pie) metro (m) 3.048000 E-Ol* 0.305Poundal (lb'm'pie/s2) newton (N) 1.382 550 E -01 0.138
Pulgada (pulg) metro (m) 2.540 000 E -02* 0.025 4Revoluciones/minuto (rpm) radián/segundo (rad/s) 1.047 198 E -01 0.105Slug kilogramo (kg) 1.459 390 E + 01 14.6Tonelada corta (2000 lbm) kilogramo (kg) 9.071 847 E + 02 907t Un asterisco indica que el factor de conversión es exacto.Tabla 3 Conversión de unidades del SI a unidades usuales en Estados UnidosMultiplíquese porPara convertir de a Exacto ComúnJoule (J) libra-pie (lb'pie) 7.375 620E-OI 0.737Joule (J) libra-pulgada (Ib'pulg) 8.850 744 E + 00 8.85Kilogramo (kg) libra masa (lbm) 2.204 622 E + 00 2.20Slug 6.852 178 E -02 0.0685tonelada corta (2000 Ibm) LI02 311 E-03 0.001 10
Metro (m) pie (pie) 3.280 840 E + 00 3.28pulgada (pulg) 3.937008E+OI 39.4milla (mi) 6.213 712E+02 621Newton(N) libra (lb) 2.248 089 E -01 0.225poundal (lb' pie/s 2) 7.233 012 E + 00 7.23Newton-metro (N'm) libra-pie (lb'pie) 7.375 620E-Ol 0.737libra-pulgada (lb'pulg) 8.850 744 E + 00 8.85Newton-metro/segundo (N'm/s) caballo de potencia (hp) 1.341 022 E - 03 0.001 34Pascal (Pa) libra/pie2 (lb/pie2) 2.088 543 E -02 0.0209libra-pulgada2(Ib/pulg.. 1.450 370 E -04 0.000 145Radian/segundo (rad/s) revoluciones por minuto (rpm) 9.549 297 E + 00 9.55Watt (W) caballo de potencia (hp) 1.341 022 E -03 0.001 34
libra-pie/segundo (lb'pie/s) 7.375620E-Ol 0.737tbra-pulgada/ segundo (lb'Imlg/ s) 8.850 744 E +00 8.85

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 480/508
Tabla 4 Propiedades de las áreasA = área1 = momento de inercia del área/ momento polar de inercia del áreak radio de giroy distancia centroidal
RectánguloTriánguloTl..CirculoCírculo perforadoA bh1 bh3 = 12k = O.289hhY= 2k = O.236h
Y_ h"3APÉNDICE 597k =1 VDi-+ d24D Y 2"J =!!.. (D' d4) 32

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 481/508
598 TEORíA DE MÁQUINAS y MECANISMOSTabla 5 Momentos de inercia de masaDisco redondoPrisma rectangularCilindro"/"' ..I
Cilindro huecoConoba;r1.' =mP121. =-mr2x 2l.y =I.' =4mr. m(a2+ C2)1, = 12
i, m(b2+c.. 12I.X =2mrm(a2+b..2. m(3a2 + 3b2 + F) 1, = 12I.x I.y = ". =-2mr 5-Esfera

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 482/508
APÉNDICE 599Tabla 6 Funciones de involutaGrados Inv ti> Grados Inv ti> Grados Inv ti> Grados Inv ti>00.0 .00000000.1 .000000 03.1 .000053 06.1 .000404 09.1 .00134900.2 .000000 03.2 .000058 06.2 .000424 09.2 .001394
00.3 .000000 03.3 .000064 06.3 .000445 09.3 .00144000.4 . 000000 03.4 .000070 06.4 .000467 09,4 .00148800.5 .000000 03.5 .000076 06.5 .000489 09.5 .00153600.6 .000000 03.6 .000083 06.6 .000512 09.6 .00158600.7 .000000 03.7 .000090 06.7 .000536 09.7 .00163600.8 . 000000 03.8 .000097 06.8 .000560 09.8 .00168800.9 .000001 03.9 .000105 06.9 .000586 09.9 .00174001.0 ,000002 04,0 .000114 07.0 .000612 10.0 ,00179401.1 .000002 04.1 .000122 07.1 .000638 10.1 .00184901.2 .000003 04.2 .000132 07.2 .000666 10.2 .00190501.3 .000004 04.3 .000141 07.3 .000694 10.3 .00196201,4 .000005 04,4 .000151 07 4 .000723 10,4 .002020
01.5 ,000006 04,5 .000162 07.5 ,000753 10.5 .00207901.6 .000007 04.6 ,000173 07.6 .000783 10.6 .00214001.7 .000009 04.7 .000184 07.7 .000815 10.7 .00220201.8 .000010 04.8 .000197 07.8 .000847 10.8 .00226501.9 .000012 04.9 .000209 07.9 .000880 10.9 .00232902.0 .000014 05.0 .000222 08.0 .000914 11.0 .00239402.1 .000016 05.1 .000236 08.1 .000949 11.1 ,00246102.2 .000019 05.2 .000260 08.2 .000985 11.2 .00252802.3 .000022 05.3 .000265 08.3 .001022 11.3 .00259802,4 .000025 05,4 ,000280 08,4 ,001059 11,4 .00266802.5 .000028 05.5 .000296 08.5 .001098 11.5 .00273902.6 .000031 05,6 ,000312 08.6 ,001137 11.6 .00281202.7 .000035 05.7 .000329 08.7 .001178 11.7 .002894
02,8 :000039 05.8 .000347 0,8.8 ,001219 11.8 .00296202.9 .000043 05.9 .000366 08.9 001262 11.9 .00303903.0 .000048 06.0 .000384 09.0 .001305 12.0 .00311712.1 .003197 16.3 .007932 20.6 .016337 24.8 .02922312.2 .003277 16,4 .008082 20.7 .016585 24.9 .02959812.3 ,003360 16,5 .008234 20.8 .016836 25.0 .02997512.4 .003443 20.9 .01708912.5 .003529 16.6 .008388 21.0 .017345 25.1 .03035716.7 .008544 25.2 .03074112.6 .003615 16.8 .008702 21.1 .017603 25.3 .03113012.7 .003712 16.9 .008863 21.2 .017865 25,4 .03152112.8 .003792 17.0 .009025 21.3 .018129 25.5 .031917
12.9 .003883 21.4 .01839513.0 .003975 17.1 .009189 21.5 .018665 25.6 .03231517.2 .009355 25.7 .032718
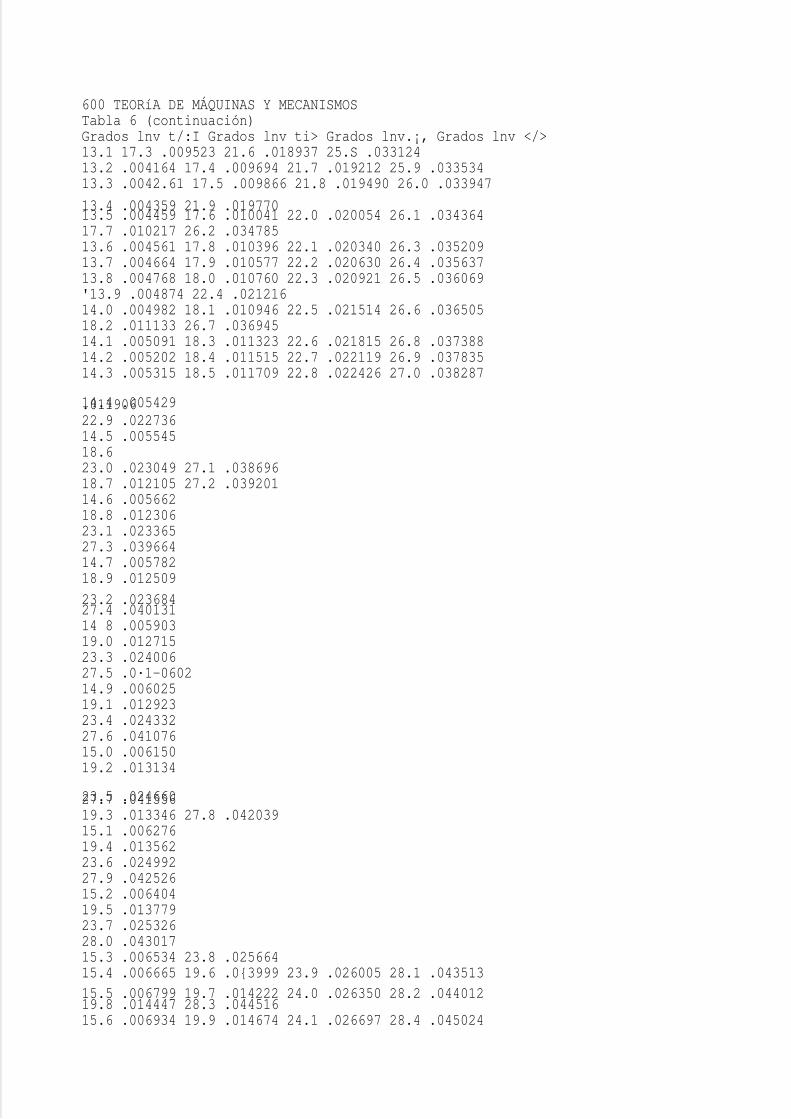
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 483/508
600 TEORíA DE MÁQUINAS Y MECANISMOSTabla 6 (continuación)Grados lnv t/:I Grados lnv ti> Grados lnv.¡, Grados lnv </>13.1 17.3 .009523 21.6 .018937 25.S .03312413.2 .004164 17.4 .009694 21.7 .019212 25.9 .03353413.3 .0042.61 17.5 .009866 21.8 .019490 26.0 .033947
13.4 .004359 21.9 .01977013.5 .004459 17.6 .010041 22.0 .020054 26.1 .03436417.7 .010217 26.2 .03478513.6 .004561 17.8 .010396 22.1 .020340 26.3 .03520913.7 .004664 17.9 .010577 22.2 .020630 26.4 .03563713.8 .004768 18.0 .010760 22.3 .020921 26.5 .036069'13.9 .004874 22.4 .02121614.0 .004982 18.1 .010946 22.5 .021514 26.6 .03650518.2 .011133 26.7 .03694514.1 .005091 18.3 .011323 22.6 .021815 26.8 .03738814.2 .005202 18.4 .011515 22.7 .022119 26.9 .03783514.3 .005315 18.5 .011709 22.8 .022426 27.0 .038287
14.4 .005429.01190622.9 .02273614.5 .00554518.623.0 .023049 27.1 .03869618.7 .012105 27.2 .03920114.6 .00566218.8 .01230623.1 .02336527.3 .03966414.7 .00578218.9 .012509
23.2 .02368427.4 .04013114 8 .00590319.0 .01271523.3 .02400627.5 .0·1-060214.9 .00602519.1 .01292323.4 .02433227.6 .04107615.0 .00615019.2 .013134
23.5 .02466027.7 .04155619.3 .013346 27.8 .04203915.1 .00627619.4 .01356223.6 .02499227.9 .04252615.2 .00640419.5 .01377923.7 .02532628.0 .04301715.3 .006534 23.8 .02566415.4 .006665 19.6 .0{3999 23.9 .026005 28.1 .043513
15.5 .006799 19.7 .014222 24.0 .026350 28.2 .04401219.8 .014447 28.3 .04451615.6 .006934 19.9 .014674 24.1 .026697 28.4 .045024
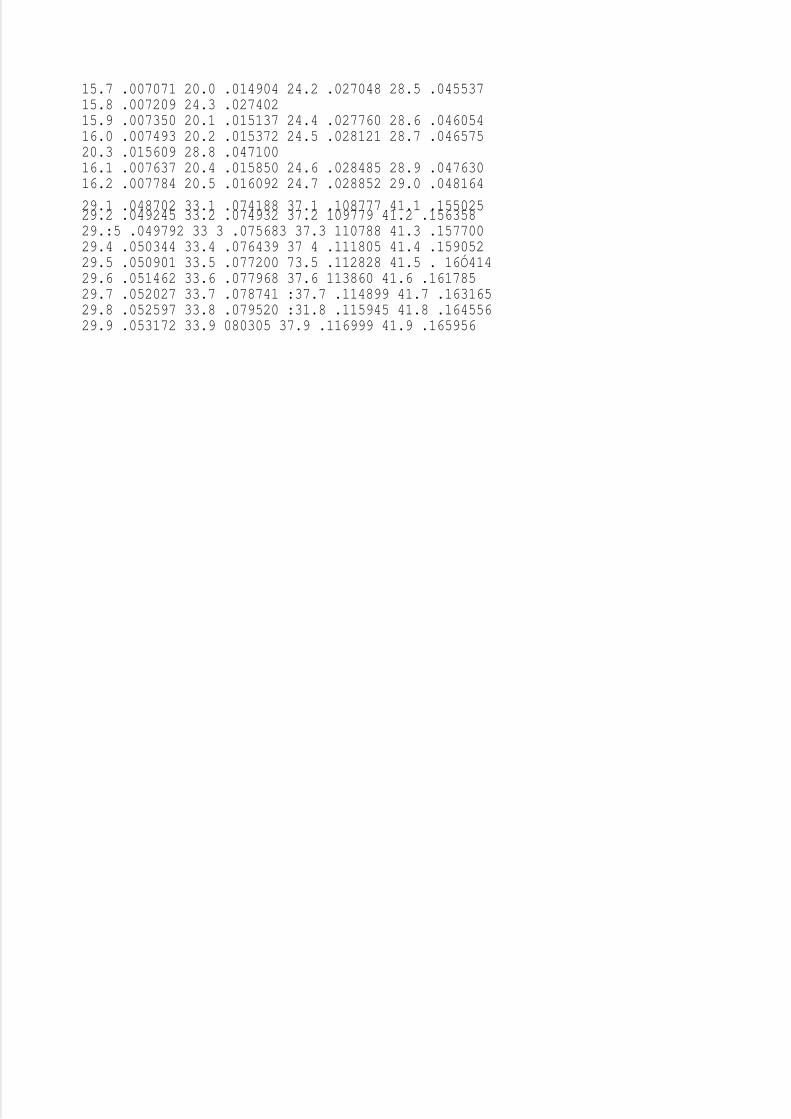
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 484/508
15.7 .007071 20.0 .014904 24.2 .027048 28.5 .04553715.8 .007209 24.3 .02740215.9 .007350 20.1 .015137 24.4 .027760 28.6 .04605416.0 .007493 20.2 .015372 24.5 .028121 28.7 .04657520.3 .015609 28.8 .04710016.1 .007637 20.4 .015850 24.6 .028485 28.9 .04763016.2 .007784 20.5 .016092 24.7 .028852 29.0 .048164
29.1 .048702 33.1 .074188 37.1 .108777 41.1 .15502529.2 .049245 33.2 .074932 37.2 109779 41.2 .15635829.:5 .049792 33 3 .075683 37.3 110788 41.3 .15770029.4 .050344 33.4 .076439 37 4 .111805 41.4 .15905229.5 .050901 33.5 .077200 73.5 .112828 41.5 . 16Ó41429.6 .051462 33.6 .077968 37.6 113860 41.6 .16178529.7 .052027 33.7 .078741 :37.7 .114899 41.7 .16316529.8 .052597 33.8 .079520 :31.8 .115945 41.8 .16455629.9 .053172 33.9 080305 37.9 .116999 41.9 .165956

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 485/508
APÉNDICE 601Tabla 6 (continuación)Grados Inv q, Grados In!! 4> Grados Inv 4> Grados In!! 4>30.0 053751 34.0 .081097 38.0 .118060 42.0 .16736630.1 .054336 34.1 .081974 38.1 .119130 42.1 .16878630.2 .054924 34.2 .082697 38.2 .120207 42.2 .170216
30.3 .055519 34.3 .083506 38.3 .121291 42.3 .17165630 4 .056116 34.4 .084321 ' 38.4 .122384 42.4 .17310630.5 .056720 34.5 .085142 38.5 .123484 42.5 .17456630.6 .057267 34.6 .085970 38.6 .124592 42.6 .17603730.7 .057940 34.7 .086804 38.7 .125709 42.7 .17751830.8 .058558 34.8 .087644 38.8 .126833 42.8 .17900930.9 .059181 34.9 .088490 38.9 .127965 42.9 . 18051131.0 .059809 35.0 .089342 39.0 .129106 43.0 .18202331.1 .060441 35.1 .090201 39.1 .130254 43.1 .18354631.2 .061079 35.2 .091066 39.2 .131411 43.2 .18508031.3 .061721 35.3 .091938 39.3 .132576 43.3 .18662531.4 .062369 35.4 .092816 39.4 .133749 43.4 .188180
31.5 .063022 35.5 .093701 39.5 .134931 43.5 .18974631.6 .063680 35.6 :094592 39.6 .136122 43.6 .19132431. 7 .064343 35.7 .095490 39.7 .137320 43.7 .19291231.8 .065012 35.8 .096395 39.8 .138528 43.8 .19451131.9 .065685 35.9 .097306 39.9 .139743 43.9 .19612232.0 .066364 36.0 .098224 40.0 .140968 44.0 .19774432.1 .067048 36.1 .099149 40.1 .142201 44.1 .19937732.2 .067738 36.2 .1000SO 40.2 .143443 44.2 .20102232.3 .068432 36.3 .101019 40.3 .144694 44.3 .20267832.4 .069133 36.4 .101964 40.4 .145954 44.4 .20434632.5 .069838 36 5 .102916 40.5 .147222 44.5 .20602632.6 .070549 36.6 .103875 40.6 .148500 44.6 .20771732.7 .071266 36.7 .104841 40.7 .149787 44.7 .209420
32.8 .071988 36.8 .105814 40.8 .151082 44 8 .21113532.9 .072716 36.9 .106795 40.9 .152387 44.9 .21286333.0 073449 37.0 .107782 41.0 .153702 45.0 .214602

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 486/508
Abrams, J. l., 397 nAcción:de aproximación, 271-274arco de, 274-275de los dientes de los engranes, 274-275Aceleración:
absoluta, 131-132angular, 133teorema de la, 400componente de contacto por rodadura, 152-153componente de la, 134-135definición, 130del pistón, 497promedio, 129-130de los seguidores de las levas, 218-219segunda, 217-218Aceleración, análisis de la:
del eslabonamiento corredera-manivela, 141-142, 156-157del eslabonamiento de cuatro barras,139-140gráfico, 136-137del mecanismo de contacto directo,152-153de mecanismos espaciales, 491-493método de Chace, 158-159de sistemas de levas, 153-156Aceleración aparente:ecuación de la, 147obtención de la, 144-145
Aceleraciones:diferencia de, 134-135imagen de, 138-139poligonos de, 137polo de, 159-160Aceleraciones, relaciones de:íNDICEdel eslabonamiento de cuatro barras, 157-158del mecanismo de corredera-manivela, 492-493Acoplador, 19-20ADAMS,201n
Adamson, Robert W., xviAddendum, 259-260Adición vectorial, 42-43Admisión, 483AGMA (American Gear ManufacturersAssociation),248nÁlgebra compleja, 51-52Algoritmo, 180-181Alvord, H. H., 468n, 549nAmortiguadores, 554Amortiguamiento, razón de, 511-512, 580-581Amortiguamiento viscoso, 438-439, 511-512coeficiente de, 511-512
Amplitud, razón de, 512-513Análisis:armónico, 549-550

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 487/508
del cuerpo elástico, 411-412, 448del cuerpo rigido, 448,488-489,554de las levas, procedimiento de computadora,562-563603
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 488/508
604 íNDICEvectorial, programa, 181-182Análisis cinemático:mediante computadora, 472-473unidades del, 409Análisis dinámico:
gráfico, 457-458mediante computadora, 472-473unidades del, 409Análisis de las fuerzas:de los engranes helicoidales, 428gráfico, 420-421Análisis de posición:gráfico, 49-5<1de mecanismos espaciales, 390-391programa, 189Anchura de la cara:de los engranes helicoidales, 303-305
mínimo, 242-243Anchura del diente, 266-268Ángulo:de aproximación, 277-278, 280de avance, 309-312de espiral, 319-320de fase, 511-512, 525-526 _de giro, 370-371de hélice, 301-302, 309- 312de paso, 314Ángulo de presión, 118-119, 215-216, 243-244,266-268, 560-561ecuación del, 244-245
máximo, 243-246normal,302-303tabla, 312-314transversal, 302-303Ángulo de transmisión, 65,100-101,118-119,349-350definición de, 18-20extremos del, 65óptimo, 351-354Ángulos:cuadrantes de los, 185-186esféricos, 385-386, 403-404
eulerianos, 397-399signos de los, 50-51ANSI (American National Standard Institute),263-264ANSYS, 200-201Aproximación, arco de, 274-275Armónicas, 536-537Aronhold, 105nAronhold-Kennedy, teorema de, 105nArranque, condiciones de, 565-566Articulación, tipo de, 7-8, 419balanceada, 424Cardán, 385-386, 400-401
deslizante, 8-9esférica, 7-8de pasador, 7-8
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 489/508
de rótula, 9-10,387-388universal, 401, 404-405relaciones de velocidad, 404-405(Véase también Pares)ATAN2, función, 177nAtoramiento, 18-20Autoalineación, 13-14
Avance, 32Axodas, 119-120Axoides (véase Axodas)Balanceo:definición, 509del rotor, procedimiento vectorial, 519-520en el campo, 529-530general, 542-543mecanismos de, 542-543Balancín, 576-577Ball, R. S., I02nBall, punto de, 173n
Barra nodal, 526-528Base, cilindro de, 261-262BASIC, 190-191Bastidor suspendido (véase Cuna pivotada)Beer, F. P., 578nBennett, mecanismo de, 385-387Berkof, R.S., S43nBeyer, Rudolf A., 343nBiela, 21, 23articulada, 125-126,481maestra, 481Bloch, S. Sch., 367Bobillier, teorema de, 167
Bomba de doble pistón, 129Brazo, del par, 415-416Bricard, eslabonamiento de, 387"Brodell, R. Joe, 349nBrown, Julíenne V., xviCaballos de potencia, caracteristicas, 487Cadena:cerrada, 6-7cinemática, clases de, 6-7Caja de cambios (véase Cambiador develocidades)

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 490/508
Cambiador de velocidades, 339-340Cara, engrane de, 319-320Carrera de trabajo, 483Casos vectoriales, 187lista de, 45-46, 388-389Cayley, A., 365-366
Cayley, diagrama de, 365-366Celdas solares, 586-587Centro:de masa, localización del, 449-450de percusión, 464-465, 494-495del rodillo, 129Centro instantáneo:de aceleración, 159-160de curvatura, 241-242definición, 102-103de sistemas de levas, 560-561Centroda, 103-104, 161-162
móvil, 120-121, 161-162Centrodas (ijas, 119-120,120-121,161-162Centroide:de un área, 450-451definición, 448Ciclo:Diesel,481estándar del aire, 488-489Cicloide, definición, 152-153Cierre del circuito, 40-41Cigüeftal de dos codos, 538-539Cilindro de base, 261-262Cinemática, definición de, 3-5
Cinética, definición de, 3-4Circuito:cierre del, 40-41puente, 582-584CIrculo:de base, de las levas, 210-212, 266-268de excentricidad, 212-213de inflexión, 162-165, 169,170-171máximo, 403-404de paso, 258-259primario, 210-212, 238-239, 243-244Compensación mecánica, 523-524, 528-529
Compresión, 483,489-491Concurrencia, punto de, 421-423Cono posterior, 317Conservación, ley de la, 577-578Contacto:de los dientes de engranes, 271-275de los dientes de engranes helicoidales, 301-302directo, 93-94, 107por rodadura, 95, lOO, 121, 151tNDICE 60SContrapesos, 532-533Convención de los signos, para los trenes de
engranes, 326-327Coordenadas:cartesianas, 30
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 491/508
cilindricas, 30complejas, SI-52esféricas, 30imaginarias, 51-52reales, 51-52Coriolis, componente de, 147Corona dentada, 319-320
Corona dentada frontal (véase Engrane de cara)Corrección, planos de, 519Cortador de cremallera, 285-286Cortadoras-cepilladoras, 297-298Cortadores, 270-271Coulomb, fricción de, 437-438Cowie, Alexander, 343nCramer, regla de, 99-100Cremallera, 269-271de corona, 321Cruz de Malta, 40-41, 42, 74Cuadrilátero articulado (véase Eslabonamiento
de paralelogramo)Cuaterniones, 387-388Cuerpo:deformable, 411-412guia del, 344-345libre, 417-418rígido, 411-412Cuna pivotada, método de la, 523-524Curva:del acoplador, 21-23de paso, de las levas, 210, 212del punto en circulaciÓn, 171-172involuta, 263
sesgada, 33-34Curvatura:centro de, 161-163estacionaria, 171-173Chace, Milton A., 45,55,388-385Chace, procedimiento de, 60-61, 187, 189para el análisis de la aceleración, 158-159Chebychev:eslabonamiento de, 23-24espaciamiento de, 345-347Chen, F. Y., 254D' Alembert, principio de, 456
Dallas, D. B., 438n

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 492/508
606 tNDICEDatos angulares, unidades de, 183-184Dedendum, 259-260Defecto:de orden, 344-345de rama, 344-345
Denavit, Jacques, 1l8n, 161n, 173n, 343n,364, 387-388Derivadas cinemáticas, 217-218Desequilibrio:análisis del, 517-519estático, 510unidades del, 521-524Desplazamiento:angular, 75definición, 66-67volumen de, 490-491Desplazamiento aparente, 69-70, 88-89
ecuación del, 69-70Detector de errores, 581-582Dhande, Sanjay, 00, xvDiagrama de desplazamientos, 207-208imagen del, 585-586Diagramas:de bloques (véase Notación de bloques)de cuerpo libre, 417-418esquemáticos, 6-7Dientes, juego entre, 259-260, 280-281Diferencia:de desplazamientos, 66-67, 77de posición, 34-35
Diferencial automotriz, 337-338Dinámica, definición, 3-4Discontinuidades, 563-564Diseño, definición de, 2División, entre números complejos, 52-53DRAM, 200-201Dudley, Darle Wo, 308nDuong, L.To, 198nEcuación:de los caballos de potencia, 427-428, 488-489de cierre del circuito, casos de la, 51-52, 388-389
de la diferencia de velocidades, 80-81vectorial, 43-44vectorial del tetraedro, 388-389Eficiencia mecánica, 489-490Eje:de colineaci6n, 115-116, 168paralelo, fórmula del, 452-453de tornillo, instantáneo, 101-102Eje de rotación:desplazamiento del, 77localización del, 77Ejes:fijos al cuerpo, 395-397
principales, 452-453Elemento:de cuatro fuerzas, 426-427

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 493/508
de dos fuerzas, 418-420de tres fuerzas, 418-420Elevación, 207-2Q8Elipse, ecuación de la, 285nEmpuje, del engranaje helicoidal, 308Encendido, orden de, 481Energía cinética, 573-574
Engrane, tipo de:anular, 269-271, 337-338aro dentado, 337-338de cara, 319-320corona, 319-320elíptico, 121-123equivalente, 316, 318epicíclico, 329-330 (véase después planetario)de espina de pescado, 305-306de hélice doble, 301-302hipoidal, 321-322interno, 270-271
loco, 326-327planetario, 329-330sol, 329-330Zerol, 321-322Engranes:cicloidales, 296espirales, 321helicoidales, componentes de las fuerzas, 428trazado gráfico, 266-267Engranes cónicos:fuerzas sobre los, 432-433nomenclatura, 318-319Engranes helicoidales cruzados, 300, 307-308
diámetro de paso de los, 307-308Envolvente (véase Involuta)Epicicloide, 294-295Equilibrado (véase Balanceo)Equilibrador, 523-524Equilibrio estático, 416-417Errores:detector de, 581-582estructurales, 345-346Escape,483,489-490Eslabón:binario, 6-7
definición de, 5-6función del, 8-9l"ígido, hipótesis del, 39
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 494/508
Eslabonamiento:corredera-manivela, 16-17,47espacial, 405-407oscilante, 407-408cruzado, 185-186, 371-372definición, 10-11
de barras cruzadas, 123-124de Bricard, 387-388de cursor oscilante, 407-408de Chebychev, 23-24de doble manivela, 18-20cruzado, 121-123de seis barras, 547-548de Watt, 23-24esférico, 10-11paralelogramo, 15-16, 123-124planar, 10;11, 190-191RGGR, 387-388
tipos de: afin, 21, 23, 364Eslabonamiento de cuatro barras:análisis del, 60-61, 63-64esférico, 385-386espacial, 383-384inversiones del, 18programa de computadora, 184-185relaciones de velocidad angular, 99-100Eslabonamientos planos, programa, ]90-19]Espin, eje del, 576-577, 578-579Estática, definición de, 3-4Estructura:definición de, 5-6, 14-15
estáticamente indeterminadas, 14-15Euler:ecuación de, 5]-52teorema de, 67-68Euler, L., 3-4Euler-Savary, ecuación de, 163-164Eventos, de los movimientos de las levas, 207-208Excentricidad, 512-513, 555-556en los sistemas de levas, 243-244Expansión, 482, 489-490Exponente politrópico, 488-489
Factor:de amortiguamiento, 438-439de gráfica, 490-491Fagerstrom, W.B., 529-530Fase, del movimiento, 6-7Ferguson, paradoja de, 336-337Fink, N., 24-25Fisher, F.E., 468n, 584-586tNDlCE 607Flotación, del seguidor de la leva, 557-558Fluctuación de la velocidad, coeficiente de, 574-575FORTRAN, 190-191
Fourier, series de, 536-537Frecuencia:circular, 511-512, 565-566
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 495/508
natural, 511-512Frenaje de regeneración, 571Fresado, 271-274Freudenstein, Ferdinand, xvi, 115-116, 343n345-346, 368-369, 380n, 387nFricción:ángulo de, 437-438
de deslízamiento, 437-438estática, 437-438fuerzas de, 437-438Fuerza:definición de, 410medición de la, 582-584en el cigüefial, 502-503en el mUfiQn, 502-503en el pasador de articulación, 493-494en la pared del cilindro, 499-500sobre el pasador del pistón, 493-494transmitida, 427-428
Fuerza de los gases, 492-493análisis mediante computadora, 504-505Fuerzas:aplicadas, 414-415caracteristicas de las, 414-415concurrentes, 420-421de contacto, 556-557de restricción, 414-415de sacudimiento, 471-472, 503-504, 532-533en las levas. 555-556internas, 417-418pollgono de, 421-423, 517-519Fuerzas de inercia:
componente primario de las, 534-535diagrama, 504-505en los motores, 532-533primarias, 496-497secundarias, 498-499tabulación de las, 537-538Función:escalonada de entrada, 581-582generación de la, 344-345de involuta, 282-283del momento de torsión, 572-573Ganter, M A., 250, 254
Generación de la función, 344-345
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 496/508
608 ÍNDICEGenerador de la función, 356-357eslabonamiento, 380-381Generador de seftales, 524-525Ginebra, mecanismo de, 40-41, 42relaciones cinemáticas, 376, 377
Ginebra, rueda de, 42, 374Giro, radio de, 451-452Goldberg, mecanismo de, 387-388Goodman, T. P., 343nGrados de libertad, 13-14de pares, 8-9Grashof, ley de, 18Gravedad, 413-414Griffith, B. A., 397nGrodzinski, P., 364nGrúa flotante, 445-447Grübler, criterio de, 16-17
Guenther, Dennis, A., xvHain, K., 161n, 171n, 343n, 348n, 358nHall, AlIen S., Jr., 24-25, 115-116, 161n, 343n,348nHanson, O., 198nHarrisberger, Lee, 383-384, 387-388Hartenberg, Richard S., 8-9, 24-25, 161n, 172-173, 343, 364, 387nHartmann, construcción de, 162-163Hélice, ángulo de, 301-302, 309-310, 311-312Helicoide de involuta, 301-302Hinkle, Rolland T., 364Hipocicloide, 294-295
Hirschborn, J., 25, 343nHolgura, 244, 259-260claro en los motores, 505-506Hooke, articulación de, 10-11, 385-386,400-401Hrones, J. A., 21nHrones-Nelson, atlas de, 21, 22.23Humpage. engrane de reducción de, 330. 333Hunt, K. H., 24-25Imágenes, propiedades de las, 139-140IMP, 201-202Impulsor, 5-6Indicador:
del motor, 488-489diagrama, 486-488, 488-489Inercia:definición, 410momento de, -451-452Inflexión, polo de, 162-163, 164-165Interferencia, 274-275punto de, 289-290reducción de la, 276-277Inversión:cinemática, 16-17de matrices, programa, 194-195para la síntesis, 353-354
Involuta, 260-261generación de la, 266-268Iteración, 387-388
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 497/508
numérica, 191-192Jóhnston, E. R., Jr., 578nde Jonge, A. E. R., 161nJuego entre dientes, 259-260, 280-281Junta (véase Articulación),-KAM, 200-201
KAPCA, 197-198Kaufman, R. E . 200-202Kennedy, A. B. W., 5n, 104-105Kennedy, teorema de, 104-105KINSYN,200-201Kishline, C. R., 198nKloomok, M., 244nKrause, R., 114-115KuenzeI, Herbert, 343nKutzbach, criterio de, 13-14, 382, 385-386, 389-390Leva:
definición, 204ecuaciones del perfil, 230tip,o de, 204, 205,- conjugada, 206-207¡ de cui'la, 205- de anéhurá constante, 206-207de arco circular, 220-221de cara, 205de disco, 107,205,214-215de movimiento lineal, 565de placa, 205, 214-215de tambor, 205excéntrica, 555-556
inversa, 206-207tangente, 220-221trazado de una, 208-210Lévai, Z. L., 329-330Levas:conjugadas, 206-207imagen de las características de operación delas, 565, 584-585

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 498/508
Ley:conmutativa, 75, 76de la conservación, 577-578del engranaje, 260-261de los gases, 488-489Libertad:
grados de, 8-9no esencial, 385-386Libra, signo de, 413nLichty, L.C., 534nLimado, 270-271Línea:de acción, 260-261de los centros, 109de presión, 266-268Linealidad,99-1ooLocalización:de un punto, 29
relativa, 31Lowen, O. O., 542-543. 544-545Lozano, R., 198nLucas, Robert A., xviLugar geométrico, 33-34Lund, R. A., 187n, 198nMaleev, V.L., 534nMalta, cruz de, 40-41, 42, 374Máquina:para balancear, 513definición de, 4-5Marco de referencia, 6-7Masa, centro de, 449-450
equivalente, 495-496Matemáticas complejas, 531-532Materia, definición, 410Matrices, 387-388Matthew, O. K., 221-222Mecánica:definición de, 3-4divisiones de la, 4-5Mecanismo de corredera-manivela, 16-17, 47análisis del, 59-60excéntrico, 182-183inversiones del, 17-18, 73, 91-92,96-97
isósceles, 346-347posiciones limite,346-347programa, 182-183slntesis del, 347-348trazado gráfico, 199-200Mecanismo de cuatro barras:solución mediante computadora, 472-473Mecanismo de eslabón de empuje, 123-124Mecanismo espacial, 12-13análisis gráfico, 394-395de siete eslabones, 397-399Mecanismos, 10-11,383-384definición de, 6-7
significado, 5-6, 10-11tipos de: de Bennett, 385-387compás de barra, 203

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 499/508
IN DICE 609corredera-manivela, 16-17, 17-18,47,59- 60,73,91-92,97-98, 182-183, 199-200, 346-347de cuatro barras, 472-473de detención, 372-374doble corredera, 125-126, 175-176doble oscilador, 18
esférico, lO-l\, 382eslabón de arrastre, 18,73, 115-116, 125espacial, 12-\3espacial de cllatro barras, 383-384excéntricos, 25-26de Oinebra, 40-41, 42, 376, 377de Ooldberg, 387-388leva, 565-566limadora de manivela, 26-27de linea recta, 23-24, 73manivela-oscilador, 18,347-348,348-349,385-386
placa oscilante, 385-386planares, 10-11,42-43de retomo rápido, 25-26ROOR, 390-391de Roberts, 23-24volquete, 20-21Whitworth, 26-27yugo escocés, 125-126,203Mecanismos de manivela-oscilador, 18esféricos, 385-386posiciones limite, 347-348ventajas de los, 348-349Medición:
de la velocidad, 585-588dinámica, 582-584Medidores de deformaciones, 582-584Medios movimientos, 222, 229-230Memorias de computadoras, uso de las, 183-184Meritt, H. E., 264-265Método:de los centros instantáneos, 110de los cuatro clrculos, 160de la masa imaginaria, 534-536del plano fase, 531ndel rotor virtual de balanceo, 534-536
de superposición, 356-357vectorial, para el balanceo del rotor, 519-520
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 500/508
610 tNDICEM'Ewan, E., 364nMódulo, 259-260Molian, S., 244nMomento:de inercia, 451-452
de la cantidad de movimiento, 577-578de sacudimiento, 471-472, 503-504, 542-543de torsión del cigüeñal, 503-504de torsión en el eje de la leva, 557-558de torsión de inercia, 455-456, 498-499de un par, 415-416Momento de torsión del motor:caracteristicas, 487gráfica, 573-57 4tabla, 575-576Motor, 480ciclos, 482
de cuatro cilindros, 538-539disposiciones de ll! manivela, 488-489 _ de di..ersos tipos,240-?41..542-5..3de motocicleta, 536-537especificaciones, 485-486en linea, 481de tres cilindros, 481, 540-541orden de encendido, 481pistón opuesto, 483radial, 485-486tipo en V, 481MOVIlidad: 382significado, 5-6
Movimiento:armónico modificado, 222-224clases de, 33-34coplanar, 10-11espacial, 33-34helicoidal, 32de una particula, ecuación del, 411-412plano, 33-34polinominal, 234-235, 235-236rectilineo, 33-34relativo, 5-6, 7-8del seguidor, derivadas del, 217-218
uniforme, 208de vacilación, 380-381Movimiento armónico simple, 208-210,563-564derivadas del, 222ecuaciones del, 221-222gráficas, 560-561Movimiento cicloidal, 208-210, 210,212, 563-564derivadas del, 222Movimiento parabólico, 208, 563-564ecuaciones del, 216-217, 217-218Muffley, R. Y., 241n, 249nNASTRAN,200-201
Nayar, J., 24-25NBS (National Bureau of Standards), xivNelson, G.L., 21n
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 501/508
Newton, Isaac, 410Newton-Raphson, método de, 193-194Newton (unidad), 413-414Nodo, 526-528Normal a las centrodas, 121Notación:en el balanceo, 530-531
de bloques, 580-581polar, 49-50rectangular, 50-51rectangular compleja, 51-52Números:complejos, 50-51operaciones, 52-53duales, 387-388Orden de: encendido, 481Oscilador deslizador esférico, 386-387Otto, ciclo de, 481Palanca angular, 474-475
Pares, 319-320caracteristicas de los, 416-417definición de, 5-6tipos:cilindrico, 7-8envolvente, 9-10giratorio, 8-9globular, 9-10, 383-384helicoidal, 7-8inferior, 8-9, 9-10, 419plano, 7-8, 9-10prismático, 7-8, 383-384de rotación (véase antes Par giratorio)
superior, 8-9de tornillo, 383-384Pars, L. A., 399nParticula, definición de, 32,411-412Pasador, articulación de, 7-8Paso:axial,301-302de base, 269-271circular, 259-260definición, 259-260

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 502/508
diametral, 259-260normal,301-302significado, 410transversal, 301-302PeauceUier, inversor de, 23-24, 24-25, 199-200Péndulo, 452-453
ecuación del, 466-467de tres hilos, 461-469trmlar, 467-468Penetración (véase Socavación)Percusión, centro de, 464-465, 494-495Perm cicloidal,2 93-294Perfil de las levas:coordenadas del, 248-249trazado del, 212-213Perfiles conjugados, 260-261Peso/masa, controversia acerca de, 410nPíflón, 258-259
Planos de corrección, 519Poligono:de fuerzas, 421-423de momentos, 519de velocidades, 81-83, 87-88Polinomio de octavo orden, 236-237Polo de inflexión, 162-163, 164-165Poladas, 119-120Polos de velocidad, 101-102Posición:absoluta, 36-37aparente, 34-35propiedades de la, 31
relativa, 34-35Posiciones:extremas del eslabonamiento demanivela-oscilador, 347-348del volquete, 117Potenciómetros, 584-585Precarga, 565en las levas, 556-557Precesión, 577-578velocidad de, 579-580Presión media efectiva, 489-490Principia, de Newton, 411-412
Producto cruz (o vectorial), subrutina para el,472-473-Productos de inercia, 451-452Programas para computadora, 418, 420Proporciones de los dientes, para los engranescónicos, 316, 318para los engranes helicoidales, 308tabla, 263-264, 264-265Punto:muerto inferior (PMI), 536-537muerto superior (PMS), 536-537nodal, método del, 523-524nulo, 526-528
de paso, 260-261significado matemático, 32de trazo, 210,212
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 503/508
Puntos:coincidentes,6 9-10conjugados, 161-162de combinación, 220-221de precisión, 345-346Radio:de giro, 451-452
de paso, equivalente, 303del rodillo, 243-244Radio de curvatura, 241-242ecuación del, 411nminimo, 250. 254de los perfiles de levas. 215-216Rama. defecto de, 344-345Rapson, corredera de. 17SRathbone, T.C., 529-530Raven, Francis H., 96-97Raven, método de, 182-183, 189íNDICE 611
para las aceleraciones. 156-157, 157-158Raven, procedimiento de, 97-98Razón:de amplitud, 512-513de tiempos, 25-26. 348-349diámetro interior-carrera. 489-490r/I,492-493Razón de contacto, 277de los engranes helicoidales, 305-306fórmula, 277-278. 280'transversal, 305-306Razón de velocidades, 116-117,325-326
angulares. 114-115,260-261,325-326Recta generadora, 261-263Reducción punto-posición, 354-355. 359-360Regulador automático, 580-581Relación de ..elocidades, del mecanismo decorredera-manivela, 492-493Relaciones manuales, de los engraneshelicoidales, 308Rendimiento:de los sistemas de máquinas, 582-584mecánico (véase Eficiencia mecánica)Resorte:
coeficiente del, S55-556de retención, 561-562sobretensión del, 567-568

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 504/508
612 íNDICERestricciones, 7-8, 1 3- 14, 39no esenciales, 385-386Retorno, carrera de, 24-25Retroceso:acción de, 271-274
ángulo de, 277-278, 280arco de, 274-275Reuleaux, F., 4-5Revoluta, 7-8, 383-384Rigidez:compleja, 530-531de flexión, 554hipótesis de, 4-5, 5-6del resorte, 555-556de torsión, 467-468Roberts, S., 364Roberts, mecanismo de, 23-24
Rodillos de levas, tamaJ\.o de, 247-248Rosenauer, N., 1 15-1 1 6, 1611/Rotación:convenciones, 50-51de engranes helicoidales, 308de un punto, 69significado, 67-68Rothbart, H. A. , 2301/, 322n, 3431/Rótula, articulación de, 9-10, 387-388Rozamiento (véase Fricción)Rueda de Ginebra, 42, 374Ruedas (véase los engranes especificos)Ruletas, 1 19-120
Salto, 558en los sistemas de levas, 557-558Sandor, George N., xv, 3431/, 345-346Seguidor, 5-6de cara plana, 206-207de culia, 206-207,definición, 204de leva, oscilante, 474-475de rodillo, 206-207Sedales, generador de, 524-525Shigley, Joseph E., 1 101/, 5671/51, 413-414
Simpson, regla de, 574-575Síntesis, 344-345cinemática, 343definición de, 2del tipo, 343dimensional, 344-345numérica, 344-345Sistema:de addelldum largo y corto, 265-266, 290-292de circuito cerrado, 580-581de error pr.oporcional, 580-581Internacional (SI), 412-4 1 3 , 413-414de leva, de movimiento alternativo, 561-562
lineal, 457-458de realimentación, 580-581Sistemas:

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 505/508
absolutos, 412-413de control, 580-581de coordenadas, 30gravitacionales, 412-413de referencia, 30 .absolutos, 395-397Slug, definición de, 413-414
Sobretensión del resorte, 567-568Socavación, 241-242, 275-276eliminación de la, 293-294en los sistemas de levas, 240-í41Soni, A, H. , 3431/, 348-352, 387-388Soporte planetario, 329-330Stevensen, Edward N. , Jr., xvi, 34511, 538-539,548-549Stevensen, regla de, 536-537Stoddart, D. A . , 2381/Subida, de los movimientos de levas, 207-208Subrutinas vectoriales; 4í8-420
Succión, 483, 489-490Superficie de paso, de los engranes cónicos, 3 1 23 1 4Superposición, principio de, 457-458, 491-492Suspensión automotriz, 129Sustracción vectorial, 42-43Synge, J, L., 3971/Tangentes, centradas, 1 72-173Tao, D. C. , 1 7 31/, 343n, 3481/Taylor, serie de, 193-194Tesa,r, D., 1 67 1/, 24-25, 221-222Thearle, E. L., 529-530Tirón, 2 1 7-218
Tolle, Glenn C., xvTrabadura, 1 8-20Trabajo, carrera de, 483Transductores, 524-525Transferencia, fórmula de, 451-452Transformadores diferenciales, 524-525, 585-586Translación, 463-464curvilinea, 67-68definición de, 67-68Transmisión de los automóviles, 327Trayectoria, de un punto, 32, 33-34
Tredgold, aproximación de, 3 1 5-3 16, 3 1 7Tren:de engranes, 226-227de engranes compuesto, 327

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 506/508
de engranes invertido, 327-329de engranes simple, 327planetario, análisis de fuerzas, 432Tres cilindros, 48 1Triángulo esférico, 403-404Uicker, J. J., Jr., 193-1 94, 201-202, 250, 254
388nUnidades:básicas, 412-41 3derivadas, 41 2-413en programación, 183- 1 84de sobremarcha, 336-337Unidades SI, 52 1 -522para engranes, 258-259nota acerca de las, 410Vacilación, movimiento de, 380-38 1Valor del tren, 326-327, 333-334Valores extremos, de las velocidades, 1 14- 1 1 5
Vector(es) :análisis de, 5 1-52desplazamiento angular, 76diferencia de aceleraciones, 1 35·136operaciones, 42-43, 43-44operaciones gráficas, 45-46, 46-47propiedades, 3 1tipo de: diferencia de velocidades, 80-81fueru, 414-415libre, 416-417momento, 4 1 5-416de posición, 34-35, 367unitario, 3 1 , 52-53
Velocidad:absoluta, 75aparente, 88-89angular , 93-94cambiador de, 339·340condición de, para el contacto por rodadura,1 52-153critica, 5 1 1-5 12de desliumiento, 93·94extremos de la, 1 14-1 1 5imagen de la, 84-85tamaño de la, 87·88
instantánea, 74medición de la, 585-588polo de, 101· 102promedio, 74de salto, 558íNDICE 613de los seguidores de las levas, 2 1 8-219teorema de la, angular, 400-401Velocidad, análisis de la:del eslabonamiento de cuatro barras, 84-85,99-1 00gráfica, 8 1-82, 109de mecanismos espaciales, 392-393
por medio de la linea de los centros, 1 1 2Velocidad angular, 78, 395-397de los..eguidores de las levas, 2 18-219
5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 507/508
diagrama polar de la, 401en los eslabonamientos de cuatro barras, 99-100relaciones, 365-366teorema de la, angular, 400-401Ventaja mecánica, 1 8-20, 1 17de los sistemas de levas, 2 1 5-21 6
Vidosic, J. P . , 24-25Vista auxiliar, 394-395Volante, representación del, 572-573Volquete:mecanismo de, 20-21posiciones de, 1 17Volumen de desplaumiento, 490-491Waldron, K. J . , 345nWatt, eslabonamiento de, 23-24Wengert, R. E., 194-195Whitworth, mecanismo de, 26-27Willis, A. H., 161n
Willis, R., 3nWolford, J. C . , 1 76nYang, A. T., 387-388Yeh, H. , 397n

5/12/2018 Teoria de Maquinas y Mecanismo - Shigley - slidepdf.com
http://slidepdf.com/reader/full/teoria-de-maquinas-y-mecanismo-shigley-55a2379f26d85 508/508


















