Temporal logics over finite traces for declarative BPM
97
Marco Montali Free University of Bozen-Bolzano [email protected] cess Story TEMPORAL DECLARATIVE OVER FOR BPM FINITE TRACES LOGICS A SUCCESS STORY marco montali free university of bozen-bolzano FMAI17
-
Upload
marco-montali -
Category
Presentations & Public Speaking
-
view
76 -
download
0
Transcript of Temporal logics over finite traces for declarative BPM

Marco Montali
Free University of Bozen-Bolzano [email protected]
A Success Story
TEMPORAL
DECLARATIVE
OVER
FOR
BPM
FINITETRACES
LOGICS
A SUCCESS STORY
marco montali free university of bozen-bolzano
FMAI17

Assets of an Organization• Data: the main information source about the history
of the domain of interest and the relevant aspects of the current state of affairs
• Resources: humans and devices responsible for the execution of work
• Business processes: how work is carried out in the domain of interest, towards the achievement of organizational objectives
2

Business Process Management
A collection ofconcepts, methodologies, techniques,to support humans in modeling, governance, deployment, enactment, and analysis ofbusiness processes
3

Business Process Lifecyclediagnosis/
requirements
configuration/implementation
(re)designenactment/monitoring
4
models
data

BPM!5

BPM?6

Environment
7

Flexibility vs ControlFlexibility: degree to which users can make local decisions about how to execute processes. Control: degree to which a system makes centralized decisions about how to execute processes.
Universe of Traces
Compliant
Traces
Compliance
Flexibility8

Trends in BPM
modeling
• Highly-variable BPs
• Metaphor: rules/constraints
Dec t ilara ev
Imperative modeling • Traditional repetitive BPs
• Metaphor: flow-chart
9
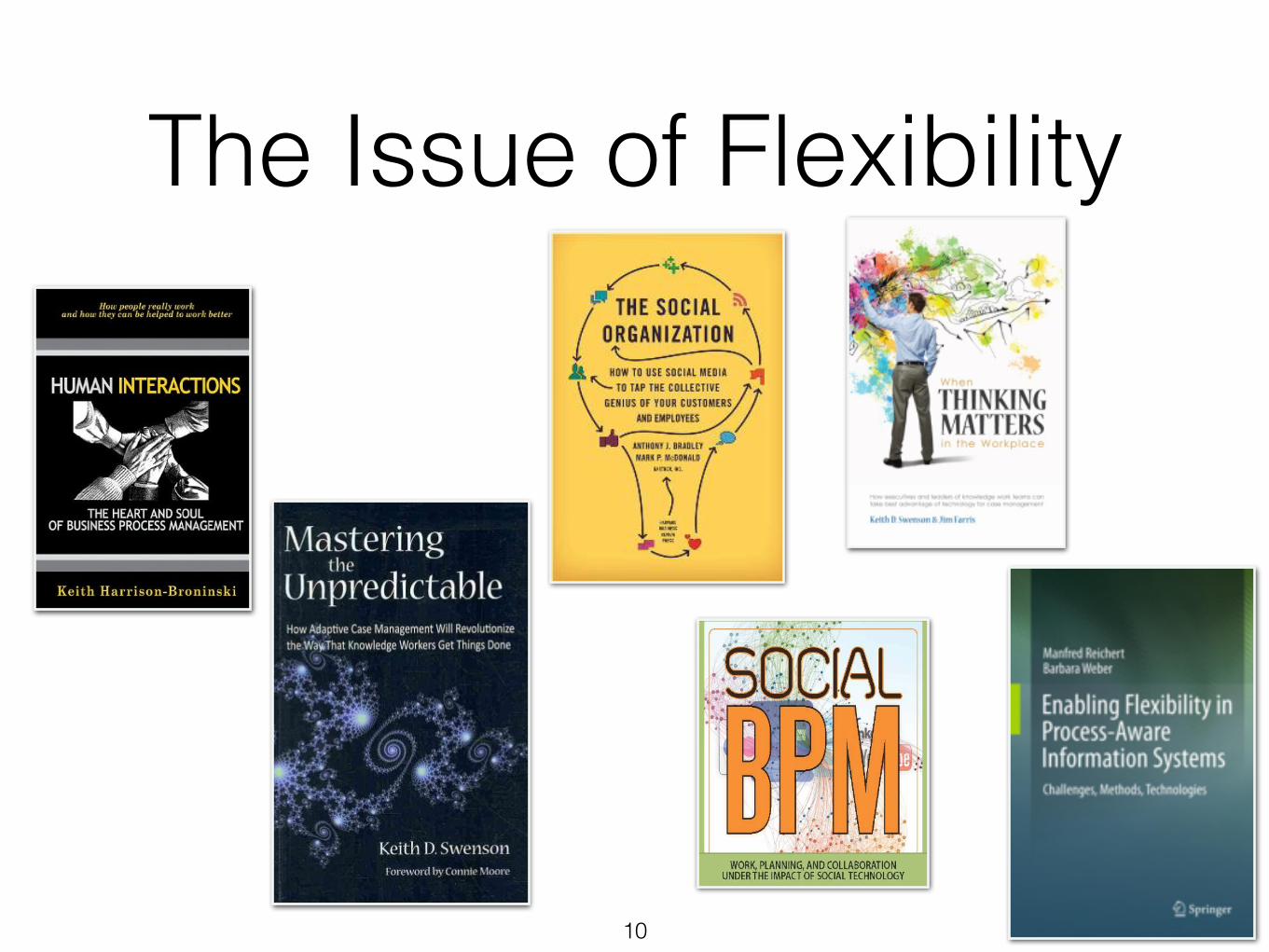
The Issue of Flexibility
10
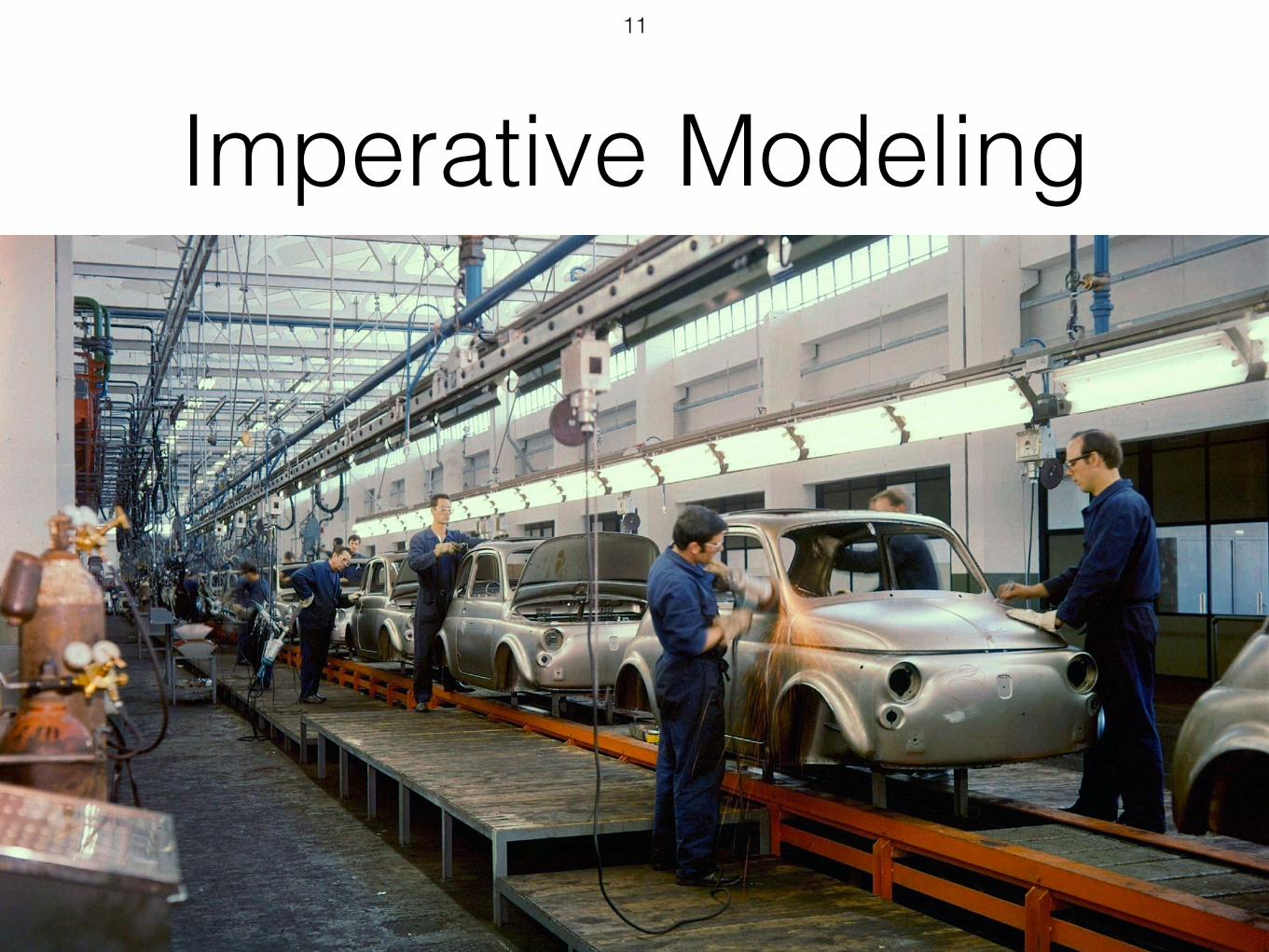
Imperative Modeling11

Organizational Boundaries12

Imperative Modeling
Focus: how things must be done
• Explicit description of the process control-flow
Closed modeling
• All that is not explicitly modeled is forbidden • Exceptions/uncommon behaviors have to be
explicitly enumerated at design time
13

BPMN
Receiveorder
Check availability
Article available?
Ship articleFinancial
settlementyes
Procurement
no Paymentreceived
Inform customer
Late deliveryUndeliverable
Customerinformed
Inform customer
Articleremoved
Remove article from catalogue
14

BPMN
Receiveorder
Check availability
Article available?
Ship articleFinancial
settlementyes
Procurement
no Paymentreceived
Inform customer
Late deliveryUndeliverable
Customerinformed
Inform customer
Articleremoved
Remove article from catalogue
Input Output
15

BPMN
Receiveorder
Check availability
Article available?
Ship articleFinancial
settlementyes
Procurement
no Paymentreceived
Inform customer
Late deliveryUndeliverable
Customerinformed
Inform customer
Articleremoved
Remove article from catalogue
Input Output
16

Organizational Boundaries17

Choreography Example• An order can be finalized at most once • Once an order is finalized, it must be confirmed or rejected • A confirmed order may be rejected later on (due to “late”
problems), but not vice-versa: a rejection cannot be reverted. • An order can be confirmed only if it shipped before. • An order may be rejected autonomously by the seller.
However, if the warehouse notifies the seller of a shipment issue, then the seller has to reject the order.
• The warehouse decision is firm: “Ship” and “Notify shipment issue” are mutually exclusive.
18

What is your Favourite Italian Food?
Order-to-delivery
19

What is your Favourite Italian Food?
Order-to-delivery
20

What is your Favourite Italian Food?
Under
stan
din
gSpag
het
tiM
odel
sw
ith
Seq
uen
ceC
lust
erin
gfo
rP
roM
9
thos
eex
cept
ions
.Fig
ure
4de
pict
sth
ere
sult
ofa
first
atte
mpt
toan
alyz
eth
eap
plic
atio
nse
rver
logs
usin
gth
ehe
uris
tics
min
er[4
].
Exc
eptio
n(c
om
ple
te)
187
Est
abele
cim
ento
NotF
oundE
xceptio
n(c
om
ple
te)
187
0,9
91 1
52
GR
EJB
Pers
iste
ncy
Exc
eptio
n(c
om
ple
te)
179
0,9
09 1
59
PG
WS
Exc
eptio
n(c
om
ple
te)
168
0,8
89 1
2
ITP
TE
xtern
alS
erv
iceE
xceptio
n(c
om
ple
te)
183 0
,944
162
SIP
SC
NoR
eco
rdsF
oundE
xceptio
n(c
om
ple
te)
160
0,8 5
Pess
oaS
ingula
rNotF
oundE
xceptio
n(c
om
ple
te)
138
0,6
67 3
Busi
ness
Logic
Exc
eptio
n(c
om
ple
te)
183
0,7
5 4
SIC
CLE
xceptio
n(c
om
ple
te)
175
0,8
57 1
9
NaoE
xist
em
Regis
tosE
xceptio
n(c
om
ple
te)
143
0,8
33 6
RP
CB
usi
ness
Exc
eptio
n(c
om
ple
te)
38 0
,75
3
SA
FB
usi
ness
Exc
eptio
n(c
om
ple
te)
115
0,8
68
GR
EJB
Busi
ness
Exc
eptio
n(c
om
ple
te)
45
0,7
5 2
3
DE
SW
SE
xce
ptio
n(c
om
ple
te)
14
0,6
67 1
4
NullP
oin
terE
xceptio
n(c
om
ple
te)
104
0,8
91
Valid
atio
nE
xceptio
n(c
om
ple
te)
31
0,8
12
GIL
Busi
ness
Exc
eptio
n(c
om
ple
te)
14
0,5 6
GR
Serv
icesE
xceptio
n(c
om
ple
te)
7 0,6
67 3
CS
IBusi
ness
Exc
eptio
n(c
om
ple
te)
14
0,5 6
Conco
rrenci
aE
xceptio
n(c
om
ple
te)
5
0,5 2
CS
IPers
iste
ncy
Exc
eptio
n(c
om
ple
te)
3
0,5 2
0,8
57 3
4
ITP
TS
erv
erE
xceptio
n(c
om
ple
te)
21
0,6
67 1
5
CO
OP
Exc
eptio
n(c
om
ple
te)
4 0,5 2
RS
IValid
atio
nE
xceptio
n(c
om
ple
te)
25
0,6
67 1
8
Basi
cSys
tem
Exc
eptio
n(c
om
ple
te)
16
0,6
67 1
1
Pesq
uis
aA
mbig
uaE
xceptio
n(c
om
ple
te)
6
0,5 6
CP
FB
usi
ness
Exc
eptio
n(c
om
ple
te)
3
0,5 2
0,8
95
AD
OP
Exc
eptio
n(c
om
ple
te)
6
0,5 5
AF
Busi
ness
Exc
eptio
n(c
om
ple
te)
64
SIP
SC
Rem
ote
Busi
ness
Exc
eptio
n(c
om
ple
te)
51
0,8
33 1
3
Concu
rrentM
odifi
catio
nE
xceptio
n(c
om
ple
te)
5
0,5 1
CD
FB
usi
ness
Exc
eptio
n(c
om
ple
te)
6
0,6
67 2
Ass
inatu
raN
aoIn
cluid
aE
xceptio
n(c
om
ple
te)
1
0,5 1
SIC
CS
Exc
eptio
n(c
om
ple
te)
32
0,8
11
Ca
rta
oC
ida
da
oE
xce
ptio
n(c
om
ple
te)
64
0,8
33 3
8
SO
AP
Exc
eptio
n(c
om
ple
te)
22
0,6
67 1
4
TooM
anyR
ow
sExc
eptio
n(c
om
ple
te)
112
0,6
67 1
8
SIP
SC
Fata
lExc
eptio
n(c
om
ple
te)
20
0,6
67 9
Lim
iteT
em
pora
lExc
eptio
n(c
om
ple
te)
4
0,5 2
0,8
28
SV
IBusi
ness
Use
rExc
eptio
n(c
om
ple
te)
18
0,7
5 1
2
GR
Concu
rrency
Exc
eptio
n(c
om
ple
te)
8 0,5 2
Contr
ibuin
teR
egio
nalN
otF
oundE
xceptio
n(c
om
ple
te)
63
0,7
5 3
0
JDO
Fata
lUse
rExc
eptio
n(c
om
ple
te)
124
0,9
47 4
9
0,6
67 5
SQ
LE
xceptio
n(c
om
ple
te)
9
0,6
67 7
IOE
xceptio
n(c
om
ple
te)
27
0,7
5 2
2
Pess
oaC
ole
ctiv
aN
otF
oundE
xceptio
n(c
om
ple
te)
23
0,7
5 2
0
Serv
iceD
ele
gate
Rem
ote
Exc
eptio
n(c
om
ple
te)
3
0,5 2
0,5 5
PA
SE
xce
ptio
n(c
om
ple
te)
2
0,5 1
File
NotF
oundE
xceptio
n(c
om
ple
te)
31
0,7
5 1
3
QgenM
IPara
metr
izedB
usi
ness
Exc
eptio
n(c
om
ple
te)
1
0,5 1
AD
OP
Mess
ageE
xceptio
n(c
om
ple
te)
3 0,5 2
Layo
ffE
xceptio
n(c
om
ple
te)
1
0,5 1
0,7
5 8
CM
PE
xceptio
n(c
om
ple
te)
1
0,5 1
GR
EJB
Rem
ote
Serv
iceE
xceptio
n(c
om
ple
te)
34
0,7
5 4
RS
IPers
iste
nce
Exc
eptio
n(c
om
ple
te)
24
0,7
5 4
CS
IRem
ote
Exc
eptio
n(c
om
ple
te)
3
0,5 1
SIP
SC
Fata
lRem
ote
CallE
xceptio
n(c
om
ple
te)
3
0,5 1
SIP
SC
Data
base
Exc
eptio
n(c
om
ple
te)
1
0,5 1
Busi
ness
Exc
eptio
n(c
om
ple
te)
159
0,6
67 9
SV
IBusi
ness
Exc
eptio
n(c
om
ple
te)
1
0,5 1
Para
metr
izedB
usi
ness
Exc
eptio
n(c
om
ple
te)
2
0,5 2
GD
Serv
icesE
xceptio
n(c
om
ple
te)
4
0,5 3
Serv
erE
xceptio
n(c
om
ple
te)
132
0,7
5 1
6
PG
Exc
eptio
n(c
om
ple
te)
6
0,6
67 5
0,7
5 4
DE
SE
xceptio
n(c
om
ple
te)
135
0,6
67 1
3
0,6
67 2
0,7
5 9 SIP
SC
Exc
eptio
n(c
om
ple
te)
27
0,7
5 9
Report
Exc
eptio
n(c
om
ple
te)
5
0,6
67 2
SS
NS
erv
iceE
xceptio
n(c
om
ple
te)
1
0,5 1
AF
Exc
eptio
n(c
om
ple
te)
1
0,5 1
Inva
lidN
ISS
Exc
eptio
n(c
om
ple
te)
14 0
,75
4
0,7
5 1
4
GIL
Concu
rrency
Exc
eptio
n(c
om
ple
te)
1
0,5 1
RS
ISys
tem
Exc
eptio
n(c
om
ple
te)
28
0,7
5 7
0,6
67 5
0,6
67 1
0,7
5 2
0,6
67 5
0,8
33 5
0,6
67 5
0,6
67 4
0,7
5 1
2
0,9
81 5
3
AD
OP
Use
rChoic
eE
xceptio
n(c
om
ple
te)
1
0,5 1
0,6
67 5
RP
CE
xceptio
n(c
om
ple
te)
1
0,5 1
GR
EJB
Concu
rrency
Exc
eptio
n(c
om
ple
te)
15 0
,875
8
0,5 1
0,5 1
0,6
67 1
Mora
daP
ort
uguesa
NotF
oundE
xceptio
n(c
om
ple
te)
1
0,5 1
0,7
5 4
0,5 1
0,6
67 6
0,5 1
0,5 2
0,8
89 8
0,7
5 3
0,8 3
RS
IExc
eptio
n(c
om
ple
te)
1
0,5 1
0,5 1
0,5 1
0,6
67 4
0,6
67 3
0,5 1
0,5 2
0,7
5 5
0,5 1
0,5 1
0,5 2 0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,8 1
0,5 1
0,5 1
0,5 1
Fig
.4.
Spag
het
tim
odel
obta
ined
from
the
applica
tion
serv
erlo
gsusi
ng
the
heu
rist
ics
min
er.
Usi
ngth
ese
quen
cecl
uste
ring
plug
-inan
dit
spr
epro
cess
ing
capa
bilit
ies,
asw
ella
sthe
poss
ibili
tyof
visu
ally
adju
stin
gth
ecl
uste
rmod
elsa
ccor
ding
toce
rtai
nth
resh
olds
,itw
aspo
ssib
leto
iden
tify
seve
ralp
atte
rnsin
volv
ing
di�e
rent
type
sof
exce
ptio
ns.T
hese
patt
erns
wer
efo
und
afte
rse
vera
latt
empt
sof
tuni
ngw
ith
the
prep
roce
ssin
gpa
ram
eter
s,se
lect
ing
the
num
ber
ofcl
uste
rs(t
ypic
ally
from
3to
Healthcare21

What is your Favourite Italian Food?
Under
stan
din
gSpag
het
tiM
odel
sw
ith
Seq
uen
ceC
lust
erin
gfo
rP
roM
9
thos
eex
cept
ions
.Fig
ure
4de
pict
sth
ere
sult
ofa
first
atte
mpt
toan
alyz
eth
eap
plic
atio
nse
rver
logs
usin
gth
ehe
uris
tics
min
er[4
].
Exc
eptio
n(c
om
ple
te)
187
Est
abele
cim
ento
NotF
oundE
xceptio
n(c
om
ple
te)
187
0,9
91 1
52
GR
EJB
Pers
iste
ncy
Exc
eptio
n(c
om
ple
te)
179
0,9
09 1
59
PG
WS
Exc
eptio
n(c
om
ple
te)
168
0,8
89 1
2
ITP
TE
xtern
alS
erv
iceE
xceptio
n(c
om
ple
te)
183 0
,944
162
SIP
SC
NoR
eco
rdsF
oundE
xceptio
n(c
om
ple
te)
160
0,8 5
Pess
oaS
ingula
rNotF
oundE
xceptio
n(c
om
ple
te)
138
0,6
67 3
Busi
ness
Logic
Exc
eptio
n(c
om
ple
te)
183
0,7
5 4
SIC
CLE
xceptio
n(c
om
ple
te)
175
0,8
57 1
9
NaoE
xist
em
Regis
tosE
xceptio
n(c
om
ple
te)
143
0,8
33 6
RP
CB
usi
ness
Exc
eptio
n(c
om
ple
te)
38 0
,75
3
SA
FB
usi
ness
Exc
eptio
n(c
om
ple
te)
115
0,8
68
GR
EJB
Busi
ness
Exc
eptio
n(c
om
ple
te)
45
0,7
5 2
3
DE
SW
SE
xce
ptio
n(c
om
ple
te)
14
0,6
67 1
4
NullP
oin
terE
xceptio
n(c
om
ple
te)
104
0,8
91
Valid
atio
nE
xceptio
n(c
om
ple
te)
31
0,8
12
GIL
Busi
ness
Exc
eptio
n(c
om
ple
te)
14
0,5 6
GR
Serv
icesE
xceptio
n(c
om
ple
te)
7 0,6
67 3
CS
IBusi
ness
Exc
eptio
n(c
om
ple
te)
14
0,5 6
Conco
rrenci
aE
xceptio
n(c
om
ple
te)
5
0,5 2
CS
IPers
iste
ncy
Exc
eptio
n(c
om
ple
te)
3
0,5 2
0,8
57 3
4
ITP
TS
erv
erE
xceptio
n(c
om
ple
te)
21
0,6
67 1
5
CO
OP
Exc
eptio
n(c
om
ple
te)
4 0,5 2
RS
IValid
atio
nE
xceptio
n(c
om
ple
te)
25
0,6
67 1
8
Basi
cSys
tem
Exc
eptio
n(c
om
ple
te)
16
0,6
67 1
1
Pesq
uis
aA
mbig
uaE
xceptio
n(c
om
ple
te)
6
0,5 6
CP
FB
usi
ness
Exc
eptio
n(c
om
ple
te)
3
0,5 2
0,8
95
AD
OP
Exc
eptio
n(c
om
ple
te)
6
0,5 5
AF
Busi
ness
Exc
eptio
n(c
om
ple
te)
64
SIP
SC
Rem
ote
Busi
ness
Exc
eptio
n(c
om
ple
te)
51
0,8
33 1
3
Concu
rrentM
odifi
catio
nE
xceptio
n(c
om
ple
te)
5
0,5 1
CD
FB
usi
ness
Exc
eptio
n(c
om
ple
te)
6
0,6
67 2
Ass
inatu
raN
aoIn
cluid
aE
xceptio
n(c
om
ple
te)
1
0,5 1
SIC
CS
Exc
eptio
n(c
om
ple
te)
32
0,8
11
Ca
rta
oC
ida
da
oE
xce
ptio
n(c
om
ple
te)
64
0,8
33 3
8
SO
AP
Exc
eptio
n(c
om
ple
te)
22
0,6
67 1
4
TooM
anyR
ow
sExc
eptio
n(c
om
ple
te)
112
0,6
67 1
8
SIP
SC
Fata
lExc
eptio
n(c
om
ple
te)
20
0,6
67 9
Lim
iteT
em
pora
lExc
eptio
n(c
om
ple
te)
4
0,5 2
0,8
28
SV
IBusi
ness
Use
rExc
eptio
n(c
om
ple
te)
18
0,7
5 1
2
GR
Concu
rrency
Exc
eptio
n(c
om
ple
te)
8 0,5 2
Contr
ibuin
teR
egio
nalN
otF
oundE
xceptio
n(c
om
ple
te)
63
0,7
5 3
0
JDO
Fata
lUse
rExc
eptio
n(c
om
ple
te)
124
0,9
47 4
9
0,6
67 5
SQ
LE
xceptio
n(c
om
ple
te)
9
0,6
67 7
IOE
xceptio
n(c
om
ple
te)
27
0,7
5 2
2
Pess
oaC
ole
ctiv
aN
otF
oundE
xceptio
n(c
om
ple
te)
23
0,7
5 2
0
Serv
iceD
ele
gate
Rem
ote
Exc
eptio
n(c
om
ple
te)
3
0,5 2
0,5 5
PA
SE
xce
ptio
n(c
om
ple
te)
2
0,5 1
File
NotF
oundE
xceptio
n(c
om
ple
te)
31
0,7
5 1
3
QgenM
IPara
metr
izedB
usi
ness
Exc
eptio
n(c
om
ple
te)
1
0,5 1
AD
OP
Mess
ageE
xceptio
n(c
om
ple
te)
3 0,5 2
Layo
ffE
xceptio
n(c
om
ple
te)
1
0,5 1
0,7
5 8
CM
PE
xceptio
n(c
om
ple
te)
1
0,5 1
GR
EJB
Rem
ote
Serv
iceE
xceptio
n(c
om
ple
te)
34
0,7
5 4
RS
IPers
iste
nce
Exc
eptio
n(c
om
ple
te)
24
0,7
5 4
CS
IRem
ote
Exc
eptio
n(c
om
ple
te)
3
0,5 1
SIP
SC
Fata
lRem
ote
CallE
xceptio
n(c
om
ple
te)
3
0,5 1
SIP
SC
Data
base
Exc
eptio
n(c
om
ple
te)
1
0,5 1
Busi
ness
Exc
eptio
n(c
om
ple
te)
159
0,6
67 9
SV
IBusi
ness
Exc
eptio
n(c
om
ple
te)
1
0,5 1
Para
metr
izedB
usi
ness
Exc
eptio
n(c
om
ple
te)
2
0,5 2
GD
Serv
icesE
xceptio
n(c
om
ple
te)
4
0,5 3
Serv
erE
xceptio
n(c
om
ple
te)
132
0,7
5 1
6
PG
Exc
eptio
n(c
om
ple
te)
6
0,6
67 5
0,7
5 4
DE
SE
xceptio
n(c
om
ple
te)
135
0,6
67 1
3
0,6
67 2
0,7
5 9 SIP
SC
Exc
eptio
n(c
om
ple
te)
27
0,7
5 9
Report
Exc
eptio
n(c
om
ple
te)
5
0,6
67 2
SS
NS
erv
iceE
xceptio
n(c
om
ple
te)
1
0,5 1
AF
Exc
eptio
n(c
om
ple
te)
1
0,5 1
Inva
lidN
ISS
Exc
eptio
n(c
om
ple
te)
14 0
,75
4
0,7
5 1
4
GIL
Concu
rrency
Exc
eptio
n(c
om
ple
te)
1
0,5 1
RS
ISys
tem
Exc
eptio
n(c
om
ple
te)
28
0,7
5 7
0,6
67 5
0,6
67 1
0,7
5 2
0,6
67 5
0,8
33 5
0,6
67 5
0,6
67 4
0,7
5 1
2
0,9
81 5
3
AD
OP
Use
rChoic
eE
xceptio
n(c
om
ple
te)
1
0,5 1
0,6
67 5
RP
CE
xceptio
n(c
om
ple
te)
1
0,5 1
GR
EJB
Concu
rrency
Exc
eptio
n(c
om
ple
te)
15 0
,875
8
0,5 1
0,5 1
0,6
67 1
Mora
daP
ort
uguesa
NotF
oundE
xceptio
n(c
om
ple
te)
1
0,5 1
0,7
5 4
0,5 1
0,6
67 6
0,5 1
0,5 2
0,8
89 8
0,7
5 3
0,8 3
RS
IExc
eptio
n(c
om
ple
te)
1
0,5 1
0,5 1
0,5 1
0,6
67 4
0,6
67 3
0,5 1
0,5 2
0,7
5 5
0,5 1
0,5 1
0,5 2 0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,5 1
0,8 1
0,5 1
0,5 1
0,5 1
Fig
.4.
Spag
het
tim
odel
obta
ined
from
the
applica
tion
serv
erlo
gsusi
ng
the
heu
rist
ics
min
er.
Usi
ngth
ese
quen
cecl
uste
ring
plug
-inan
dit
spr
epro
cess
ing
capa
bilit
ies,
asw
ella
sthe
poss
ibili
tyof
visu
ally
adju
stin
gth
ecl
uste
rmod
elsa
ccor
ding
toce
rtai
nth
resh
olds
,itw
aspo
ssib
leto
iden
tify
seve
ralp
atte
rnsin
volv
ing
di�e
rent
type
sof
exce
ptio
ns.T
hese
patt
erns
wer
efo
und
afte
rse
vera
latt
empt
sof
tuni
ngw
ith
the
prep
roce
ssin
gpa
ram
eter
s,se
lect
ing
the
num
ber
ofcl
uste
rs(t
ypic
ally
from
3to
Healthcare22

Our Goal
represents
Reality
Model
23

Constraint-Based Modeling24

Constraint-Based Modeling
Focus: what has to be accomplished
• Explicit description of the relevant business constraints • behavioral constraints, best practices, norms, rules, …
Open modeling
• All behaviors are possible unless they are explicitly forbidden
• Control-flow left implicit
25

Organizational Boundaries26

Declare27

Declare28

Declare• A constraint-based extensible language
for flexible process modeling
• An execution engine for constraint-based processeshttp://www.win.tue.nl/declare/
• Originally proposed by Pesic and van der Aalst
• Formalized by Pesic and van der Aaalst, and by _
29

Modeling in Declare
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
30

0..1
Modeling in Declare
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
An order can be finalized at most once
31

0..1
Modeling in Declare
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
Once an order is finalized, it must be confirmed or rejected
32
0..1
Modeling in Declare
Finalize order
Confirmorder
Rejectorder
Ship
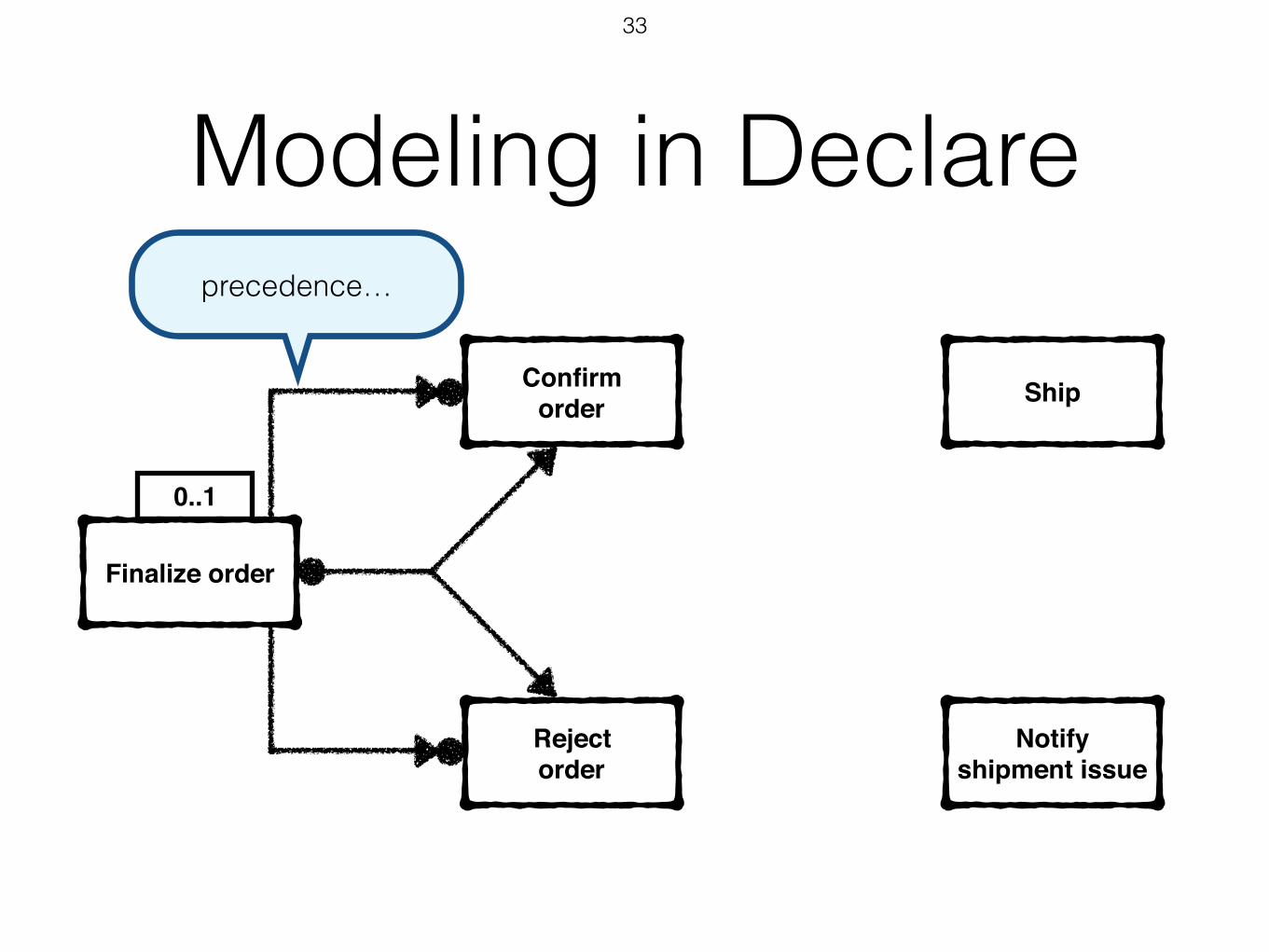
Notify shipment issue
precedence…
33

0..1
Modeling in Declare
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
A confirmed order may be rejected later on, but not vice-versa
34

0..1
Modeling in Declare
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
if the warehouse notifies the seller of a shipment issue, then the seller has to reject the order
An order can be confirmed only if it shipped before
35

0..1
Modeling in Declare
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
Mutually exclusive
36

Existence Constraints50 3 The ConDec Language
Table 3.1. ConDec existence constraints
name graphical meaning
absence(a)
0
a Activity a cannot be executed
absence(n+1,a)
0..n
aActivity a can be executed at most n times, i.e., theexecution trace cannot contain n + 1 occurrences of a
existence(n,a)
n..∗
a Activity a must be executed at least n times
exactly(n,a)
n
a Activity a must be executed exactly n times
init(a)
init
a Activity a must be the first executed activity
1..∗
order item
On the contrary, an absenceN constraint could be used to state that at mostthree payment attempts can be made by the customer:
0..3
pay
3.3.2 Choice Constraints
Choice constraints are shown in Table 3.2. They are n-ary constraints as-serting that the interacting entities must necessarily perform some activities,selecting them inside a set of possible choices. They can be therefore seenas an extension of the existence n and exactly n constraints, replacing asingle activity with a set of activities. Choice constraints are especially usefulwhen the model contains several activities having the same effect or accom-plishing the same business goal, because they leave interacting entities free tochoose the most suitable on their own. Indeed, a ConDec choice correspondsto a deferred choice [239]: the decision is not driven by an explicit choice, butis instead delegated to the interacting entities, which take it by executing oneof the interconnected tasks. A 1 of 2 -choice could be used to state that acontributing author must submit her paper either by uploading it through theweb site of the conference or by sending it via e-mail2:
upload paper −− ♦−− e-mail paper
2 We suppose that the “n of m” notation is optional when n = 1.
Examples:
50 3 The ConDec Language
Table 3.1. ConDec existence constraints
name graphical meaning
absence(a)
0
a Activity a cannot be executed
absence(n+1,a)
0..n
aActivity a can be executed at most n times, i.e., theexecution trace cannot contain n + 1 occurrences of a
existence(n,a)
n..∗
a Activity a must be executed at least n times
exactly(n,a)
n
a Activity a must be executed exactly n times
init(a)
init
a Activity a must be the first executed activity
1..∗
order item
On the contrary, an absenceN constraint could be used to state that at mostthree payment attempts can be made by the customer:
0..3
pay
3.3.2 Choice Constraints
Choice constraints are shown in Table 3.2. They are n-ary constraints as-serting that the interacting entities must necessarily perform some activities,selecting them inside a set of possible choices. They can be therefore seenas an extension of the existence n and exactly n constraints, replacing asingle activity with a set of activities. Choice constraints are especially usefulwhen the model contains several activities having the same effect or accom-plishing the same business goal, because they leave interacting entities free tochoose the most suitable on their own. Indeed, a ConDec choice correspondsto a deferred choice [239]: the decision is not driven by an explicit choice, butis instead delegated to the interacting entities, which take it by executing oneof the interconnected tasks. A 1 of 2 -choice could be used to state that acontributing author must submit her paper either by uploading it through theweb site of the conference or by sending it via e-mail2:
upload paper −− ♦−− e-mail paper
2 We suppose that the “n of m” notation is optional when n = 1.
50 3 The ConDec Language
Table 3.1. ConDec existence constraints
name graphical meaning
absence(a)
0
a Activity a cannot be executed
absence(n+1,a)
0..n
aActivity a can be executed at most n times, i.e., theexecution trace cannot contain n + 1 occurrences of a
existence(n,a)
n..∗
a Activity a must be executed at least n times
exactly(n,a)
n
a Activity a must be executed exactly n times
init(a)
init
a Activity a must be the first executed activity
1..∗
order item
On the contrary, an absenceN constraint could be used to state that at mostthree payment attempts can be made by the customer:
0..3
pay
3.3.2 Choice Constraints
Choice constraints are shown in Table 3.2. They are n-ary constraints as-serting that the interacting entities must necessarily perform some activities,selecting them inside a set of possible choices. They can be therefore seenas an extension of the existence n and exactly n constraints, replacing asingle activity with a set of activities. Choice constraints are especially usefulwhen the model contains several activities having the same effect or accom-plishing the same business goal, because they leave interacting entities free tochoose the most suitable on their own. Indeed, a ConDec choice correspondsto a deferred choice [239]: the decision is not driven by an explicit choice, butis instead delegated to the interacting entities, which take it by executing oneof the interconnected tasks. A 1 of 2 -choice could be used to state that acontributing author must submit her paper either by uploading it through theweb site of the conference or by sending it via e-mail2:
upload paper −− ♦−− e-mail paper
2 We suppose that the “n of m” notation is optional when n = 1.
37

Choice Constraints3.3 Constraints 51
Table 3.2. ConDec choice constraints
name graphical meaning
choice(n of m,[a1,...,am])a1
am
a2n of m
...
At least n distinct activitiesamong a1,. . . ,am must be exe-cuted
ex choice(n of m,[a1,...,am])a1
am
a2n of m
...
Exactly n distinct activitiesamong a1,. . . ,am must be exe-cuted
Note that the constraint supports an execution trace containing three submis-sions of the paper (via e-mail and/or by using the web site), while it evaluatesa trace without submissions as noncompliant.
A 1 of 2 -exclusive choice can be instead adopted to model the existencebetween two alternatives that exclude each other. For example, it could beused to state that, within an instance of the system, the customer commitsherself to cancel or successfully close the order, but not both:
cancel order −− !−− close order
It is worth noting that choice constraints, together with the existenceNand exactlyN ones, constitute a family of goal-oriented constructs. Indeed,they impose the mandatory presence of (some of) the involved activities inany possible execution trace supported by the model, independently of theother constraints and of the specific courses of interaction.
3.3.3 Relation Constraints
Differently from goal-oriented constraints, relation constraints express posi-tive dependencies among activities; in their simplest form, they interconnecttwo activities (the generalized case will be discussed in Sect. 3.3.5). As shownin Table 3.3, the graphical representation of each relationship coherently com-municates the meaning of the relationship:
• the number of lines used to interconnect the two activities indicates howmuch tight is the dependency;
• the position of the “•” element determines which activity has the abilityof triggering the dependency;
• the presence of an arrow and its relative position with respect to the“•” element denote the qualitative temporal constraint associated to therelation.
In particular, when a relation constraint is connected to an activity througha “•” element, such an activity is called source of the constraint, and has
Examples:
3.3 Constraints 51
Table 3.2. ConDec choice constraints
name graphical meaning
choice(n of m,[a1,...,am])a1
am
a2n of m
...
At least n distinct activitiesamong a1,. . . ,am must be exe-cuted
ex choice(n of m,[a1,...,am])a1
am
a2n of m
...
Exactly n distinct activitiesamong a1,. . . ,am must be exe-cuted
Note that the constraint supports an execution trace containing three submis-sions of the paper (via e-mail and/or by using the web site), while it evaluatesa trace without submissions as noncompliant.
A 1 of 2 -exclusive choice can be instead adopted to model the existencebetween two alternatives that exclude each other. For example, it could beused to state that, within an instance of the system, the customer commitsherself to cancel or successfully close the order, but not both:
cancel order −− !−− close order
It is worth noting that choice constraints, together with the existenceNand exactlyN ones, constitute a family of goal-oriented constructs. Indeed,they impose the mandatory presence of (some of) the involved activities inany possible execution trace supported by the model, independently of theother constraints and of the specific courses of interaction.
3.3.3 Relation Constraints
Differently from goal-oriented constraints, relation constraints express posi-tive dependencies among activities; in their simplest form, they interconnecttwo activities (the generalized case will be discussed in Sect. 3.3.5). As shownin Table 3.3, the graphical representation of each relationship coherently com-municates the meaning of the relationship:
• the number of lines used to interconnect the two activities indicates howmuch tight is the dependency;
• the position of the “•” element determines which activity has the abilityof triggering the dependency;
• the presence of an arrow and its relative position with respect to the“•” element denote the qualitative temporal constraint associated to therelation.
In particular, when a relation constraint is connected to an activity througha “•” element, such an activity is called source of the constraint, and has
38
52 3 The ConDec Language
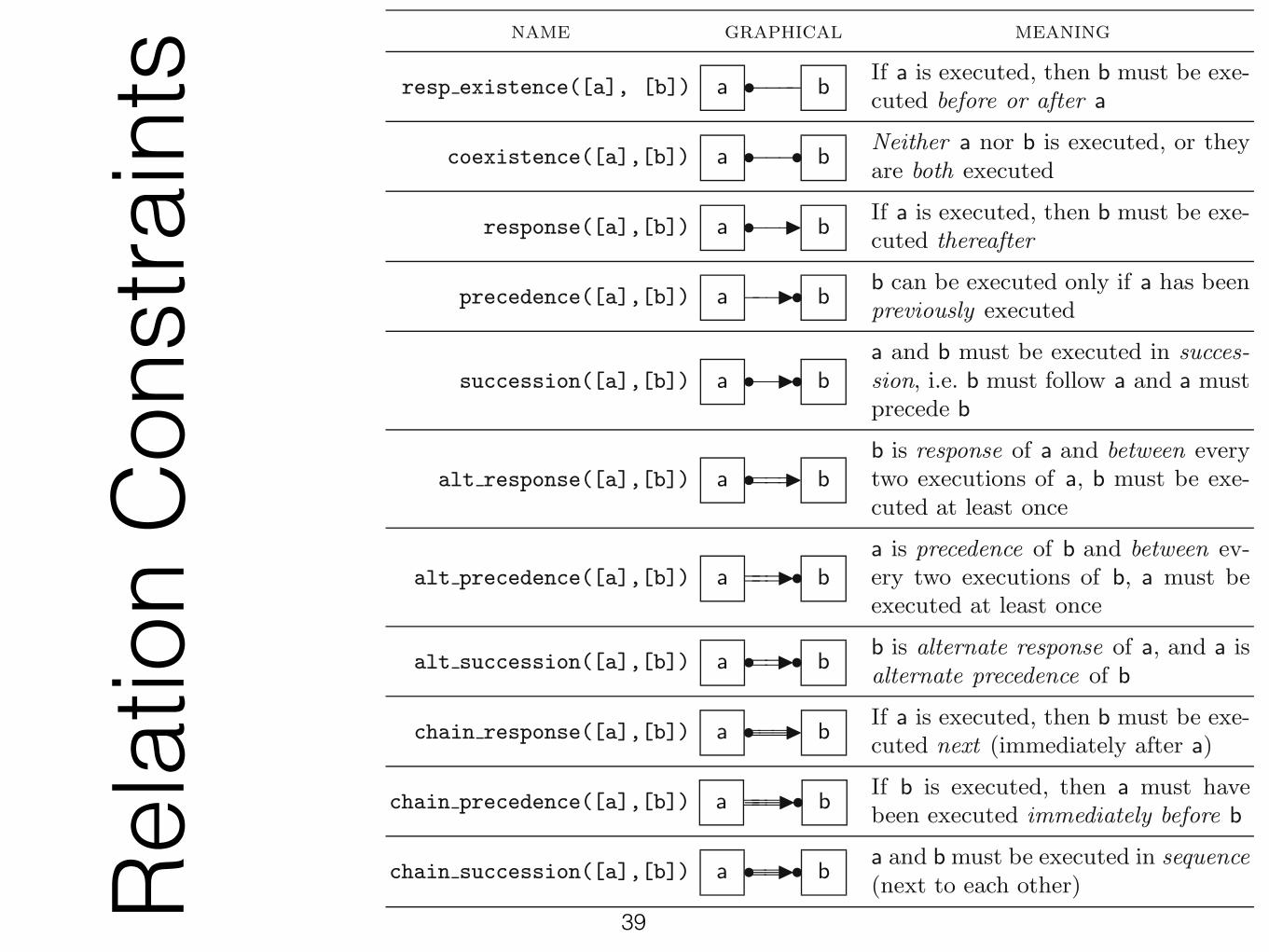
Table 3.3. ConDec relation constraints
name graphical meaning
resp existence([a], [b]) a •−−−− bIf a is executed, then b must be exe-cuted before or after a
coexistence([a],[b]) a •−−−• bNeither a nor b is executed, or theyare both executed
response([a],[b]) a •−−−! bIf a is executed, then b must be exe-cuted thereafter
precedence([a],[b]) a −−−!• bb can be executed only if a has beenpreviously executed
succession([a],[b]) a •−−!• ba and b must be executed in succes-sion, i.e. b must follow a and a mustprecede b
alt response([a],[b]) a •===! bb is response of a and between everytwo executions of a, b must be exe-cuted at least once
alt precedence([a],[b]) a ===!• ba is precedence of b and between ev-ery two executions of b, a must beexecuted at least once
alt succession([a],[b]) a •==!• bb is alternate response of a, and a isalternate precedence of b
chain response([a],[b]) a •=−=−=−! bIf a is executed, then b must be exe-cuted next (immediately after a)
chain precedence([a],[b]) a =−=−=−!• bIf b is executed, then a must havebeen executed immediately before b
chain succession([a],[b]) a •=−=−!• ba and b must be executed in sequence(next to each other)
the ability to trigger it. When the constraint triggers, then also the targetactivity, connected to the other side of the relation, must be executed. Relationconstraints are therefore reactive.
Starting from this basic schema, each relation constraint differs from theothers for what concerns when the occurrence of the target is expected to hap-pen as the constraint triggers. The responded existence and coexistencerelation constraints do not impose any temporal ordering, but rather leavethe interacting entities completely free to decide when the execution of thetarget is placed.
Example 3.3.1 (Unordered business constraint). Let us consider an interactionmodel regulating the messages exchange between a seller and a warehouse,which stores the goods of the seller. When the warehouse ships a good, then
Rela
tion
Con
stra
ints
39

Neg
atio
n C
onst
rain
ts
3.3 Constraints 55
Table 3.4. ConDec negation constraints
name graphical meaning
resp absence([a],[b]) a •−−−−∥ bIf a is executed, then b can neverbe executed
not coexistence([a],[b]) a •−−−•∥ b a and b exclude each other
neg response([a],[b]) a •−−−!∥ b b cannot be executed after a
neg precedence([a],[b]) a −−−!•∥ b a cannot be executed before b
neg succession([a],[b]) a •−−!•∥ ba and b cannot be executed insuccession
neg alt response([a],[b]) a •===!∥ bb cannot be executed betweenany two occurrences of a
neg alt precedence([a],[b]) a ===!•∥ ba cannot be executed betweenany two bs
neg alt succession([a],[b]) a •==!•∥ bb cannot be executed betweenany two as and viceversa
neg chain response([a],[b]) a •=−=−=−!∥ b b cannot be executed next to a
neg chain precedence([a],[b]) a =−=−=−!•∥ ba cannot be executed immedi-ately before b
neg chain succession([a],[b]) a •=−=−!•∥ ba and b cannot be executed insequence
Indeed, a •=−=−=−!∥ b states that when activity a is executed, b can beexecuted if at least one intermediate occurrence of another activity exists; onthe contrary, a •−−−−∥ b forbids the presence of b along the whole instance,if a is performed inside that instance.
Negation constraints are peculiar of open approaches, where by default allactivities can be executed in any order. In this respect, it would be unfea-sible to assume that “positive” constraints are sufficient for expressing sig-nificant interaction models. Furthermore it is sometime much more effectiveand compact to model the undesired behaviors rather than the allowed ones.For example, the not coexistence constraint could be directly employed in aConDec model to express that two activities are incompatible, e.g., that theseller cannot accept and reject an incoming order when interacting with acustomer:
accept order •−−−•∥ reject order
40

Semantics of Declarediagnosis/
requirements
configuration/implementation
enactment/monitoring
41
data
(re)design
models

The Origin of Declare…
42

The Origin of Declare…
43
LTL

A Slide of FairnessThe disruptive novelty of this idea has to be
put in the BPM context!
• In AI, these ideas have been around for a long time
• E.g., work on declarative interaction protocols and temporal declarative specification of agents
44

The Origin of Declare…
45
LTL ⇤(m ! �⌃e)

The Origin of Declare…
46
LTLEach process instance eventually terminates!

The Origin of Declare…
47
LTLfEach process instance eventually terminates!
Models: finite traces

Declare 2 Finite State AutomataLTLf NFA
nondeterministicDFA
deterministic
LTLf2aut determin.
'
48
For a single constraint: local automaton
For the whole model: global automaton

Our Vision… Realized!
'
LTLf NFAnondeterministic
DFAdeterministic
LTLf2aut determin.
49
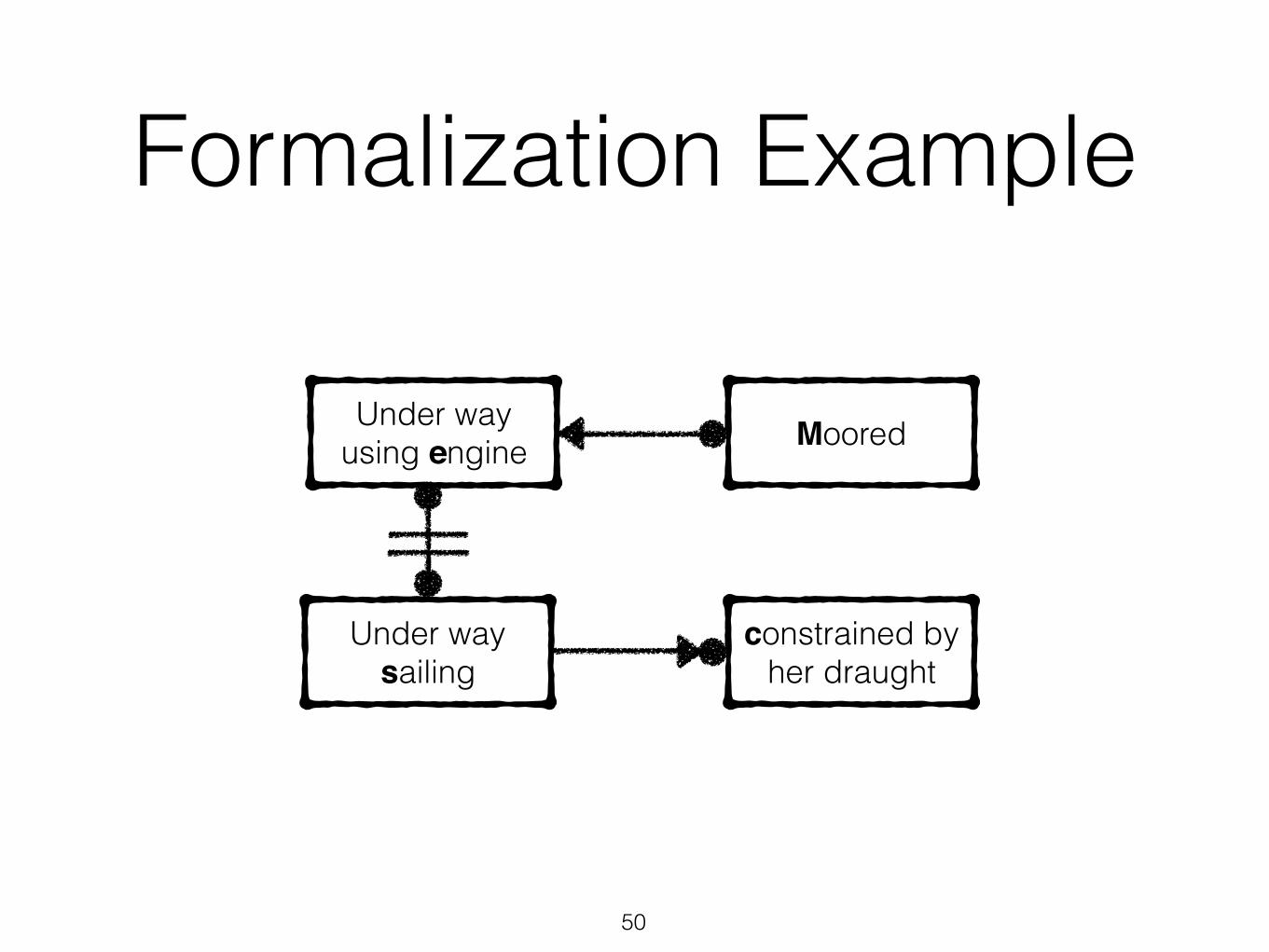
Formalization Example
MooredUnder way using engine
Under way sailing
constrained by her draught
50

Formalization Example
MooredUnder way using engine
Under way sailing
constrained by her draught
¬(⌃e ^ ⌃s)
Model formula: conjunction of all constraint formulae
⇤(m ! �⌃e)
51
¬cWs

Correctness Verificationdiagnosis/
requirements
configuration/implementation
enactment/monitoring
52
data
(re)design
models

0..1
Example
a c
b
53
0..1
Example
a c
b
dead activity
54

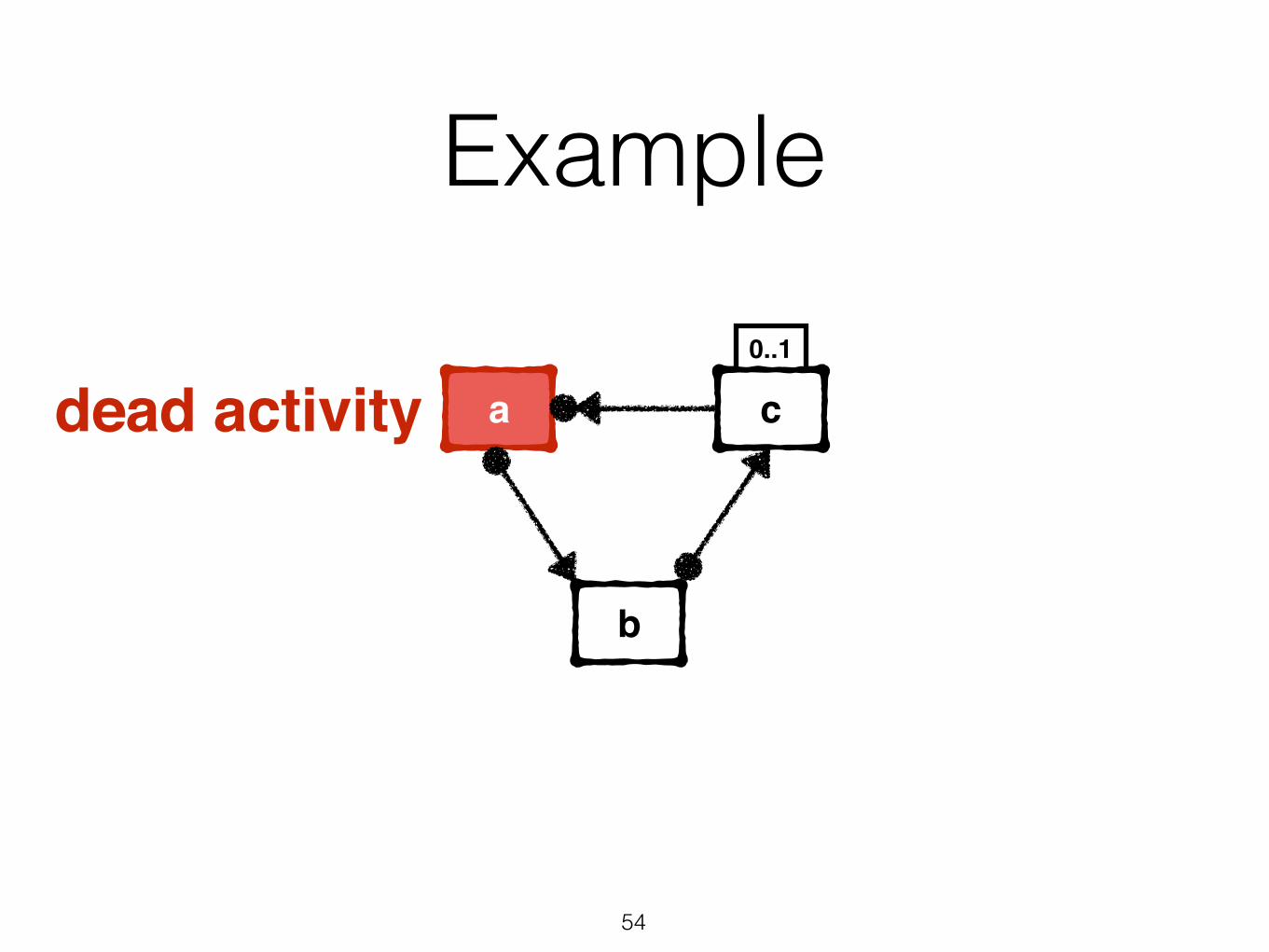
0..1
Example
a c
b
dead activity
55

Correctness• In BPM: typically assessed via model checking
• In the case of Declare: satisfiability • Correct Declare model: there exists at least a finite
trace satisfying all its constraints • i.e., if its LTLf model formula is satisfiable
• A correct model may still contain dead activities: activities that can never be executed
• How to check? Language emptiness of the corresponding NFA
56

(re)design
models
diagnosis/requirements
configuration/implementation
57
data
enactment/monitoring
Enactment and Monitoring
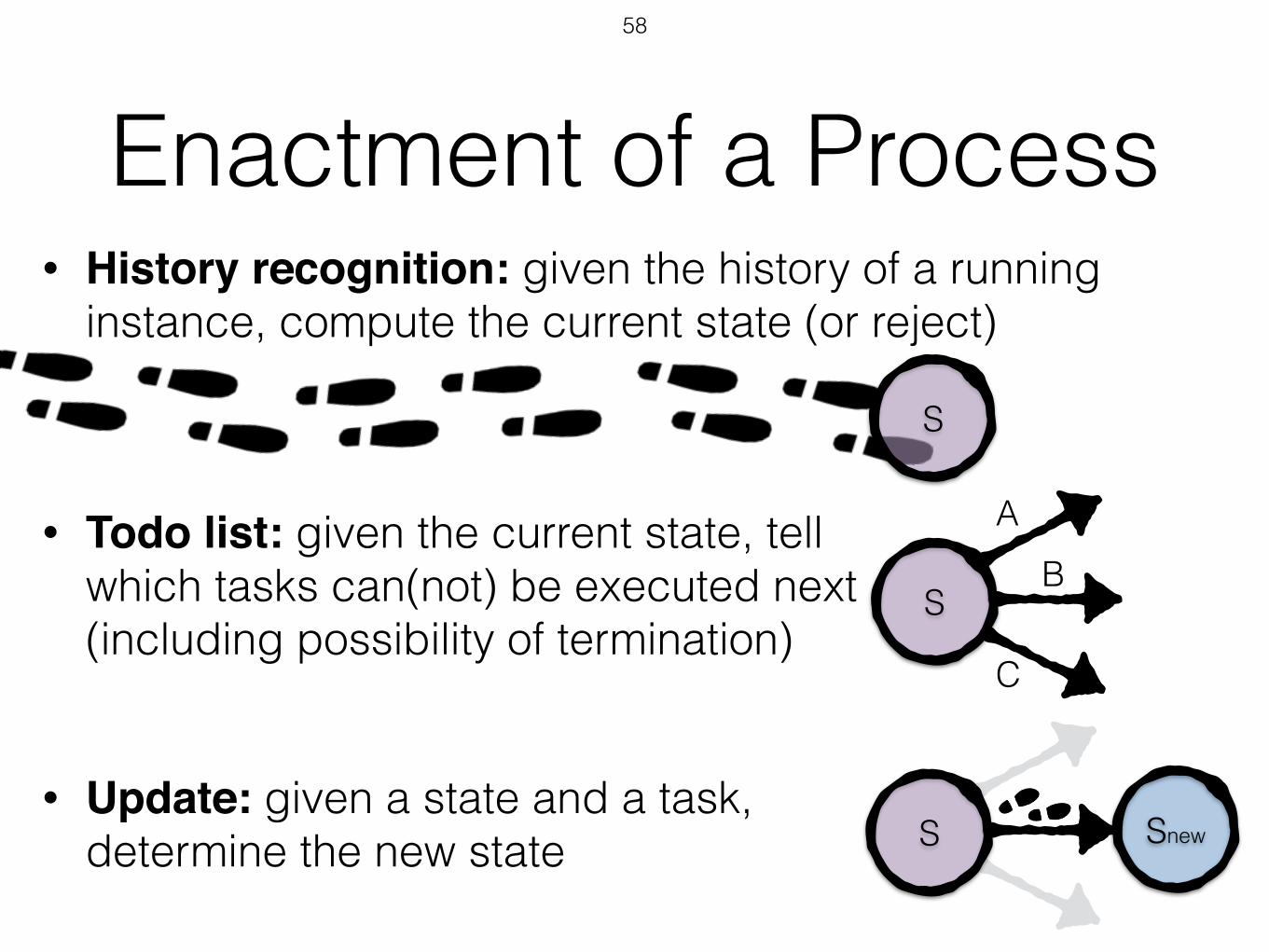
Enactment of a Process• History recognition: given the history of a running
instance, compute the current state (or reject)
• Todo list: given the current state, tell which tasks can(not) be executed next (including possibility of termination)
• Update: given a state and a task, determine the new state
S
AB
C
S
SnewS
58

Execution
0..1
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
59
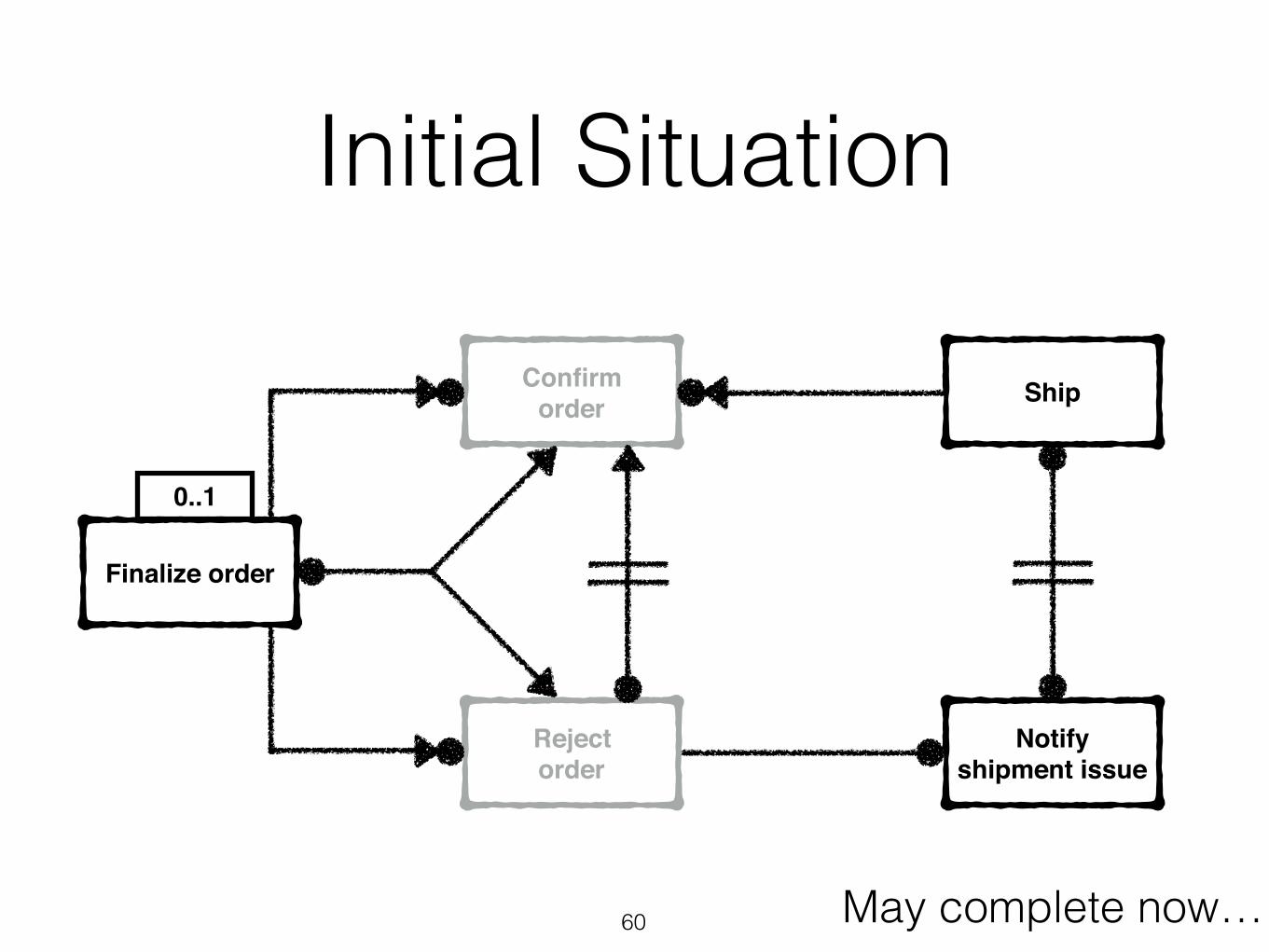
Initial Situation
0..1
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
May complete now…60

“Finalize Order”
0..1
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
61
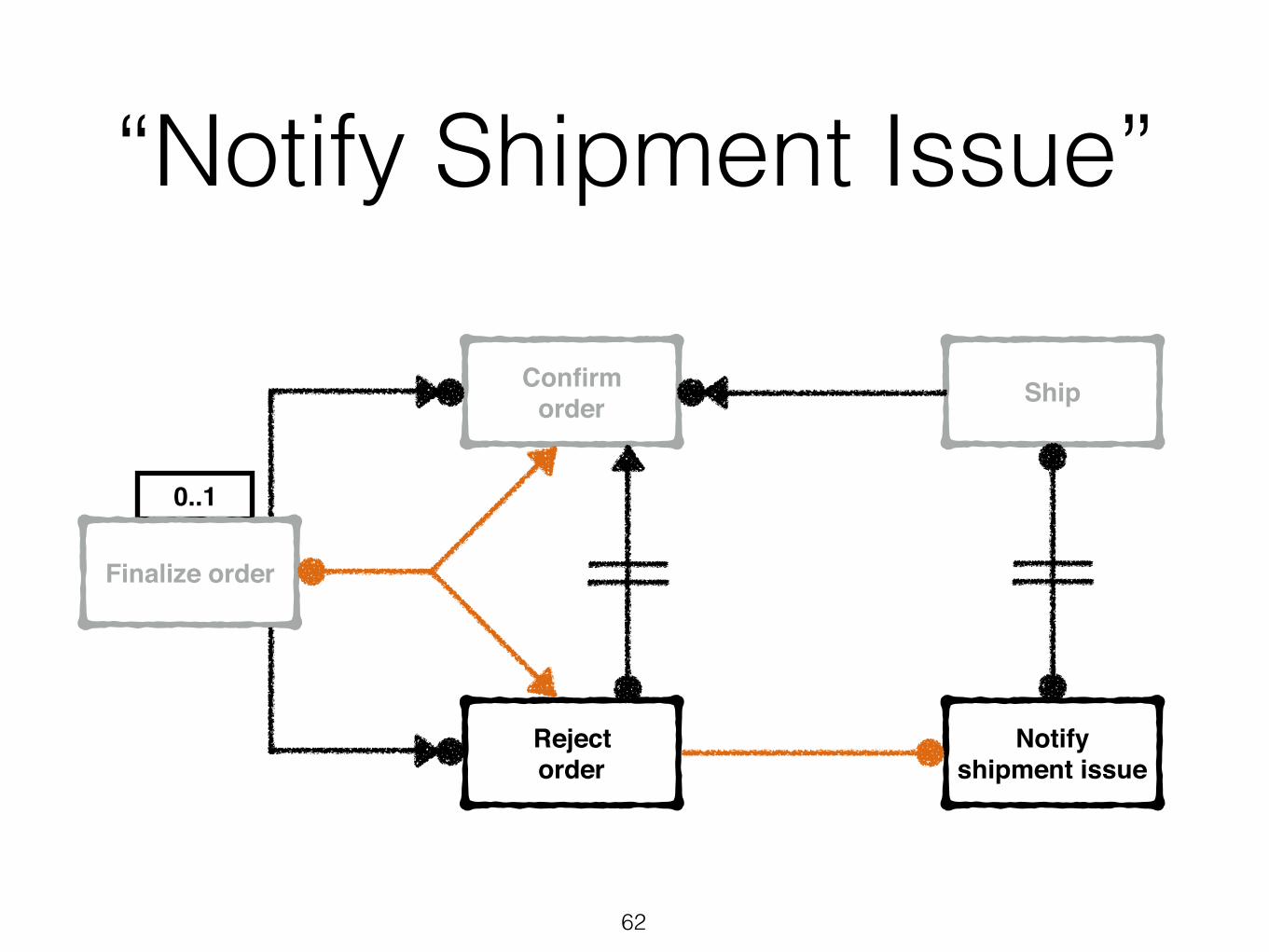
“Notify Shipment Issue”
0..1
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
62

“Reject Order”
0..1
Finalize order
Confirmorder
Rejectorder
Ship
Notify shipment issue
May complete now…63

Hidden Dependencies
Ship
Notify shipment issue
Pick package Insert material Close package
64

Initial State
Ship
Notify shipment issue
Pick package Insert material Close package
May complete now…65

Initial State
Ship
Notify shipment issue
Pick package Insert material Close package
May complete now…
What if I execute this?
66

“Notify Shipment Issue”
Ship
Notify shipment issue
Pick package Insert material Close package
May complete now…
!!!
67

RV-LTL Truth ValuesRefined analysis of the “truth value” of a constraint.
Consider a partial trace t, and a constraint C • C is permanently satisfied if t satisfies C and no matter
how t is extended, C will stay satisfied • C is temporarily satisfied if t satisfies C but there is a
continuation of t that violates C • C is temporarily violated if t violates C but there is a
continuation that leads to satisfy C • C is permanently violated if t violates C and no matter
how t is extended, C will stay violated
68

Linear Dynamic Logic over Finite Traces
69
The Logic ldl
f
[De Giacomo&Vardi,IJCAI13]Merges ltl
f
with regular expressions, through the syntax of PropositionalDynamic Logic (PDL):
Ï ::= „ | tt | � | ¬Ï | Ï1 · Ï2 | ÈflÍÏ | [fl]Ïfl ::= „ | Ï? | fl1 + fl2 | fl1; fl2 | flú
Ï: ltl
f
part; fl: regular expression part.They mutually refer to each other:
• ÈflÍÏ states that, from the current step in the trace, there is anexecution satisfying fl such that its last step satisfies Ï.
• [fl]Ï states that, from the current step in the trace, all executionsatisfying fl are such that their last step satisfies Ï.
• Ï? checks whether Ï is true in the current step and, if so, continuesto evaluate the remaining execution.
Of special interest is end = [true?]� , to check whether the trace has beencompleted (the remaining trace is the empty one).
Marco Montali (unibz) Monitoring Business Metaconstraints BPM 2014 13 / 26

Automata for LDLf
70
From ldl
f
to nfa
Direct calculation of nfa corresponding to ldl
f
formula Ï
Algorithm1: algorithm ldlf 2nfa()2: input ltlf formula Ï3: output nfa AÏ = (2P , S, {s0}, Í, {sf })4: s0 Ω {"Ï"} Û single initial state5: sf Ω ÿ Û single final state6: S Ω {s0, sf }, Í Ω ÿ7: while (S or Í change) do
8: if (q œ S and q
Õ |=w
("Â"œq) ”("Â", �))9: S Ω S fi {q
Õ} Û update set of states10: Í Ω Í fi {(q, �, q
Õ)} Û update transition relation
Note• Standard nfa.• No detour to Büchi automata.• Easy to code.• Implemented!
Auxiliary rules
”("tt", �) = true
”("� ", �) = false
”("„", �) =I
true if � |= „false if � ”|= „
(„ propositional)
”("Ï1 · Ï2", �) = ”("Ï1", �) · ”("Ï2", �)”("Ï1 ‚ Ï2", �) = ”("Ï1", �) ‚ ”("Ï2", �)
”("È„ÍÏ", �) =
Y_]
_[
"Ï" if last ”œ � and � |= „ („ propositional)”("Ï", ‘) if last œ � and � |= „false if � ”|= „
”("ÈÂ?ÍÏ", �) = ”("Â", �) · ”("Ï", �)”("Èfl1 + fl2ÍÏ", �) = ”("Èfl1ÍÏ", �) ‚ ”("Èfl2ÍÏ", �)
”("Èfl1; fl2ÍÏ", �) = ”("Èfl1ÍÈfl2ÍÏ", �)
”("ÈflúÍÏ", �) =I
”("Ï", �) if fl is test-only”("Ï", �) ‚ ”("ÈflÍÈflúÍÏ", �) o/w
”("[„]Ï", �) =
Y_]
_[
"Ï" if last ”œ � and � |= „ („ propositional)”("Ï", ‘) if last œ � and � |= „ („ propositional)true if � ”|= „
”("[Â?]Ï", �) = ”("nnf (¬Â)", �) ‚ ”("Ï", �)”("[fl1 + fl2]Ï", �) = ”("[fl1]Ï", �) · ”("[fl2]Ï", �)
”("[fl1; fl2]Ï", �) = ”("[fl1][fl2]Ï", �)
”("[flú]Ï", �) =I
”("Ï", �) if fl is test-only”("Ï", �) · ”("[fl][flú]Ï", �) o/w
Marco Montali (unibz) Monitoring Business Metaconstraints BPM 2014 22 / 26

Black Magic with LDLf
71
Runtime ldl
f
MonitorsCheck partial trace fi = e1, . . . , e
n
against formula Ï.
From ad-hoc techniques . . .
e1 . . .e
n |=C
ÏD
RV =Y___]
___[
temp_truetemp_falsetruefalse
. . . To standard techniques
e1 . . .e
n |=Y______]
______[
Ïtemp_true
Ïtemp_false
Ïtrue
Ïfalse
Marco Montali (unibz) Monitoring Business Metaconstraints BPM 2014 14 / 26

Colored Automata
72
'
00 1
m
e
not m not e

'temp true
Colored Automata
73
''temp false 'perm false'perm true
00 1
m
e
not m not e

'temp true
Colored Automata
74
''temp false 'perm false'perm true
00 1
m
e
not m not e
00 1
m
e
not m not e

Coloring local automataColoring simply amounts to reachability checks!
• State permanently satisfied: it is final and cannot reach a non-final state
• State temporarily satisfied: it is final but can reach a non-final state
• State temporarily violated: it is non-final but can reach a final state
• State permanently violated: it is non-final and cannot reach a final state
75

Local Colored Automata
• For each constraint, we take its LTLf formula, and compute the corresponding DFA
• This DFA accepts all and only the execution traces that lead to satisfy (pemanently or temporarily) the constraint
76

Local Automata: Example
mooredunder way using engine
under way sailing
constrained by her draught
0s
c
not {c,s}true1
0 true
00 1
m
e
not m not e
s
e
not s
true00
not {s,e}1
2
3
e
s
not e
1
2
77

Global AutomatonWhat about hidden dependencies?
• We have to consider the interplay between constraints
• To do that: compute the “global automaton” for the entire model. Either: • Take the “conjunction formula” of all constraints and
get the DFA • Compute the intersection of the local DFAs
78

Global Colored AutomatonBy carefully intersecting local DFAs: we get a
global DFA that retains all “local colors”. This is… an execution engine!
79

Implemented in ProM!
Approach1. Input ltl
f
/ldl
f
constraints and metaconstraints.2. Produce the corresponding RV ldl
f
monitoring formulae.3. Apply the direct algorithm and get the corresponding nfas.4. (Incrementally) run nfas the monitored trace.
Marco Montali (unibz) Monitoring Business Metaconstraints BPM 2014 23 / 26
MonitoringThe same approach can be used for monitoring
• With LDLf, we can predicate about the truth value of constraints
• Direct support formeta-constraints • Compensation constraints • Contrary-to-duty constraints • Dynamic activation/
disablement of constraints80

enactment/monitoring
Process Mining
81
(re)design
models
configuration/implementation
data
diagnosis/requirements

Declarative Process Discovery
82Event log

Declarative Process Discovery
83Event log
Declarative model that “best” capture the
process hidden in the log

Basic Idea of Existing Algorithms
• Apply heuristics to guess a constraint
• Check the support of the constraint
• Check the interestingness factor of the constraint
• Combine these two metrics to decide whether to keep the constraint or not
• Iterate and prune
84

Problems• Correctness of the overall declarative model (for
constraints with <100% support)
• Minimality of the overall declarative model (redundant constraints)
• How to determine whether a constraint is interesting or not
• All these questions: successfully tackled with logics and automata!
85

Interestingness and Vacuity
• ababababab • adfbcdadb • acb • acbaafb • aabbabbb
86
⇤(a ! ⌃b)Support: 100%
⇤(a ! ⌃b)Support: 100%

Why is a trace interesting for a constraint?
• Because it “activates” the constraint, “changing” something
• Semantically: • It flips the RV-LTL state of the constraint • It changes the set of allowed transitions
• Non-vacuous satisfaction =satisfaction + interestingness
87

Example
88
00 1
a
b
not a not b
⇤(a ! ⌃b) ⇤(a ! ⌃b)
a c b a a f b

Another Example
89
c a d a f
¬(⌃a ^ ⌃b)
a
b
not b
true00
not {a,b}1
2
3
b
a
not a
1
2
c d f f

Activation-Aware Automata
90
Conclusion• BPM struggles to balance flexibility and control • Constraint-based approaches and temporal logics over finite
traces offer a solution • The automata-theoretic approach leads to a “correct by
design” computation mechanism to assist humans during the entire process lifecycle
• A lot of open challenges! • Measuring interestingness (“graded within a trace”) • Mix declarative and imperative approaches • Data!
91

And the Story Continues…
Object-Centric Declare (joint work with Wil van der Aalst and Guangming Li)
92
OrderItem Package
Pick Item
Pay Order
Get Package
0..1 ** 0..1

Acknowledgments• Wil van der Aalst
• Maja Pesic
• Federico Chesani
• Paola Mello
• Fabrizio Maggi
93
• Michael Westergaard
• Giuseppe De Giacomo
• Riccardo De Masellis
• Claudio di Ciccio
• Jan Mendling

Some ReferencesDeclare and its formalizations• M. Pesic and W. van der Aalst, A Declarative Approach for Flexible Business
Processes Management, in BPM Workshops. Vol. 4103 of LNCS, pp. 169-180. Springer, 2007.
• M. Montali, M. Pesic, W. M. P. van der Aalst, F. Chesani, P. Mello, and S. Storari, Declarative specification and verification of service choreographies, ACM Trans. Web, vol. 4, pp. 3:1–3:62, 2010.
• M. Montali. Specification and Verification of Declarative Open Interaction Models: a Logic- Based Approach, vol. 56 of LNBIP. Springer, 2010.
• M. Westergaard, Better Algorithms for Analyzing and Enacting Declarative Workflow Languages Using LTL, in BPM, vol. 6896 of LNCS, pp. 83-98. Springer, 2010.
• Giuseppe De Giacomo, Riccardo De Masellis, Marco Montali,Reasoning on LTL on Finite Traces: Insensitivity to Infiniteness, in AAAI, pp. 1027-1033. AAAI Press, 2014.
94

Some ReferencesDeclare Execution Environment• M. Pesic, H. Schonenberg, and W. M. P. van der Aalst, DECLARE:
Full Support for Loosely-Structured Processes, in EDOC, pp. 287–300. IEEE Computer Society, 2007.
• M. Pesic, M. Schonenberg, N. Sidorova, and W. van der Aalst, Constraint-Based Workflow Models: Change Made Easy, in CoopIS, vol. 4803 of LNCS, pp. 77-94. Springer, 2007.
• M. Pesic, H. Schonenberg, and W. Aalst, The Declare Service, in Modern Business Process Automation, Springer, 2010, pp. 327-343.
• M. Westergaard, F. M. Maggi, Declare: A Tool Suite for Declarative Workflow Modeling and Enactment, BPM (Demos) 2011.
95

Some ReferencesMonitoring Declare constraints• F. M. Maggi, M. Montali, M. Westergaard, and W. M. P. van der Aalst,
Monitoring Business Constraints with Linear Temporal Logic: An Approach Based on Colored Automata, in BPM, volume 6896 of LNCS, pp. 132-147. Springer, 2011.
• F. M. Maggi, M. Westergaard, M. Montali, W. M. P. van der Aalst,Runtime Verification of LTL-Based Declarative Process Models.: Proceedings of RV, volume 7186 of LNCS, pp. 131-146. Springer, 2011.
• M. Montali, F. M. Maggi, F. Chesani, P. Mello, W. M. P. van der Aalst,Monitoring business constraints with the event calculus. ACM Trans. on Intelligent Systems and Technology 5(1): 17, 2013.
• G. De Giacomo, R. De Masellis, M. Grasso, F. M. Maggi, M. Montali, Monitoring Business Metaconstraints Based on LTL and LDL for Finite Traces, in BPM, volume 8659 of LNCS, pp. 1-17. Springer, 2014.
96

Some ReferencesDiscovering Declare constraints• F. Chesani, E. Lamma, P. Mello, M. Montali, F. Riguzzi, S. Storari, Exploiting Inductive Logic Programming
Techniques for Declarative Process Mining. Trans. Petri Nets and Other Models of Concurrency 2: 278-295, 2009.
• F. Maria Maggi, A. J. Mooij, W. M. P. van der Aalst, User-guided discovery of declarative process models. In CIDM, pp. 192-199. IEEE Press, 2011.
• F. M. Maggi, R. P. J. Chandra Bose, W. M. P. van der Aalst, Efficient Discovery of Understandable Declarative Process Models from Event Logs. In CAiSE, volume 7908 of LNCS, pp. 270-285. Springer, 2012.
• F. M. Maggi, M. Dumas, L. García-Bañuelos, M. Montali, Discovering Data-Aware Declarative Process Models from Event Logs. In BPM, volume 8094 of LNCS, pp. 81-96. Springer, 2013.
• C. Di Ciccio, M. Mecella, On the Discovery of Declarative Control Flows for Artful Processes. ACM Trans. Management Inf. Syst. 5(4): 24:1-24:37, 2015.
• C. Di Ciccio, F. M. Maggi, M. Montali, J. Mendling, Ensuring Model Consistency in Declarative Process Discovery. In BPM, volume 9253 of LNCS, pp. 144-159. Springer, 2015.
• C. Di Ciccio, F. M. Maggi, M. Montali, J. Mendling, Semantical Vacuity Detection in Declarative Process Mining. In BPM, volume 9850 of LNCS, pp. 158-175. Springer, 2016.
• Claudio Di Ciccio, Fabrizio Maria Maggi, Marco Montali, Jan Mendling:Resolving inconsistencies and redundancies in declarative process models. Inf. Syst. 64: 425-446, 2017. 97



![Proof theory for hybrid(ised) logics I - COnnecting REpositories · 2019. 10. 24. · logics [7], quantum logics [13], hidden and observational logics [11, 9, 43], algebrocaic logics](https://static.fdocuments.us/doc/165x107/6125029257792013567e5d86/proof-theory-for-hybridised-logics-i-connecting-repositories-2019-10-24.jpg)