TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR...
14
TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR. Desarrollo del tema: 1. Sistemas automáticos programados . 2. Control mediante un ordenador. 3. Lenguajes de programación de alto nivel: Logo (WinLOGO) 4. Lenguajes de programación de alto nivel : BASIC. 5. Controladoras e interfaces de control. 6. Interfaces de control y programación. 7. Codificación de programas. 8. Los diagramas de flujo para representar un programa. 1. Sistemas automáticos programados . Un dispositivo es automático, cuando es capaz de desempeñar una tarea determinada sin la intervención del ser humano. Para que una máquina funcione automáticamente, es necesario que disponga de un sistema de control. Un control está formado por una serie de dispositivos que realizan las acciones oportunas en cada momento para conseguir el fin deseado. Los sistemas de control automático poseen tres partes diferenciadas: Las entradas. Son los dispositivos que detectan el estado en que se encuentra el sistema. Están formadas por los sensores. La unidad de control y programación. Son los dispositivos que analizan la señal de entrada y establecen la reacción del sistema. Las salidas. Son los dispositivos que ejecutan las acciones que decide la unidad de control y programación. Las señales, tanto de entrada como de salida, están formadas por impulsos eléctricos, que pueden ser digitales, si toma el valor de 1 (activada) o 0 (desactivada), utilizándose sistemas de relés, para su activación, o señales analógicas, de + o - , cuando la variable puede modificarse continuamente, utilizándose, para ello, circuitos integrados que van a regular, por ejemplo, la velocidad de giro de un motor. 2. Control mediante un ordenador. Por si mismo, un ordenador es un dispositivo de control, que, mediante programas adecuados o drivers, es capaz de controlar automáticamente el funcionamiento de dispositivos tales 1
Transcript of TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR...

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
Desarrollo del tema:
1. Sistemas automáticos programados .
2. Control mediante un ordenador.
3. Lenguajes de programación de alto nivel: Logo (WinLOGO)
4. Lenguajes de programación de alto nivel : BASIC.
5. Controladoras e interfaces de control.
6. Interfaces de control y programación.
7. Codificación de programas.
8. Los diagramas de flujo para representar un programa.
1. Sistemas automáticos programados .
Un dispositivo es automático, cuando es capaz de desempeñar una tarea determinada sin laintervención del ser humano.
Para que una máquina funcione automáticamente, es necesario que disponga de un sistemade control. Un control está formado por una serie de dispositivos que realizan las accionesoportunas en cada momento para conseguir el fin deseado.
Los sistemas de control automático poseen tres partes diferenciadas:Las entradas. Son los dispositivos que detectan el estado en que se encuentra el sistema.Están formadas por los sensores. La unidad de control y programación. Son los dispositivos que analizan la señal de entrada yestablecen la reacción del sistema.Las salidas. Son los dispositivos que ejecutan las acciones que decide la unidad de control yprogramación.
Las señales, tanto de entrada como de salida, están formadas por impulsos eléctricos, quepueden ser digitales, si toma el valor de 1 (activada) o 0 (desactivada), utilizándose sistemas derelés, para su activación, o señales analógicas, de + o - , cuando la variable puede modificarsecontinuamente, utilizándose, para ello, circuitos integrados que van a regular, por ejemplo, lavelocidad de giro de un motor.
2. Control mediante un ordenador.
Por si mismo, un ordenador es un dispositivo de control, que, mediante programasadecuados o drivers, es capaz de controlar automáticamente el funcionamiento de dispositivos tales
1
TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
como la impresora, el escáner, las unidades de almacenamiento, etc. La CPU de un ordenadorposee una serie de puertos , serie (COM), paralelo (LPT), USB, VGA, PS/2, Firewire , que permitecomunicarse con el resto de los periféricos y controlarlos, recibiendo y enviando información. Velocidad bit : USB1 .- 12 Mbps ;; USB2 .- 480 Mbps ;; FW 400 .- 786,5 Mbps ;; FW1600-3200 .-16 – 32 Gbps.
Los dispositivos tecnológicos, como son los pulsadores, lámparas, motores, etc, no debemosconectarlos directamente a los puertos del ordenador, ya que éste envía corriente pequeña ydañaríamos sus circuitos internos .
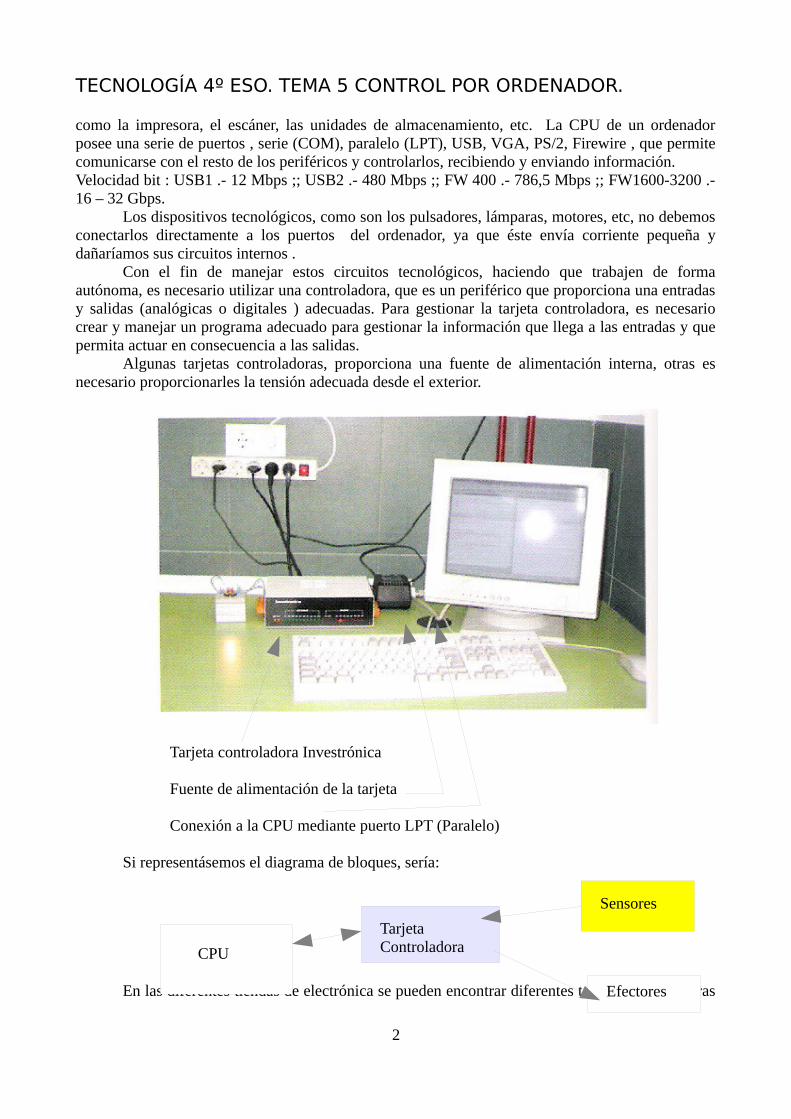
Con el fin de manejar estos circuitos tecnológicos, haciendo que trabajen de formaautónoma, es necesario utilizar una controladora, que es un periférico que proporciona una entradasy salidas (analógicas o digitales ) adecuadas. Para gestionar la tarjeta controladora, es necesariocrear y manejar un programa adecuado para gestionar la información que llega a las entradas y quepermita actuar en consecuencia a las salidas.
Algunas tarjetas controladoras, proporciona una fuente de alimentación interna, otras esnecesario proporcionarles la tensión adecuada desde el exterior.
Tarjeta controladora Investrónica
Fuente de alimentación de la tarjeta
Conexión a la CPU mediante puerto LPT (Paralelo)
Si representásemos el diagrama de bloques, sería:
En las diferentes tiendas de electrónica se pueden encontrar diferentes tarjetas controladoras
2
CPU
TarjetaControladora
Sensores
Efectores

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
como son la de Investronica, Enconor, Micro-log o Lego, con diferentes formas de conexión yprogramación. El lenguaje más utilizado para programarlas es el WinLogo.
3. Lenguajes de programación de alto nivel: Logo (WinLOGO) .
El WinLOGO, es un programa sencillo que permite realizar dibujos, efectuar operaciones yrealizar programación.
El aspecto que ofrece la pantalla es el siguiente:
Barra de título Barra de menús
Área de trabajo Menú de programación
Para borrar la ventana de gráficos se hará con la opción BPPara borrar la ventana de textos se hará mediante BT.Otras opciones preliminares de la programación de Logo será :
BL Baja lápiz.SL Sube lápiz.OT Oculta tortuga.MT Muestra tortuga.
Las distintas órdenes reciben el nombre de primitivas av 100 (adelanta 100 unidades
3
Ventana de gráficos
Ventana de textos

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
la tortuga) re 100 (retrocede 100 unidades la tortuga), gd 90 (gira la tortuga 90º), gi 90(gira latortuga 90º), etc.
Un conjunto de primitivas ordenadas y que empieza por la palabra para y termina con fin,recibe el nombre de procedimiento o programa.
Pantalla del LOGO editando dos procedimientos:El primero. Comienza con la instrucción: para circunferencia. Permite calcular el área de un
circulo conociendo el valor del radio, siendo éste introducido como variable.El segundo. Comienza con la instrucción: para cuadrado. Permite el cálculo del área de un
cuadrado introduciendo como variable el valor del lado.
Con el lenguaje LOGO, es posible operar como si fuera una máquina de calcular. Para ellose ha de considerar lo siguiente:
1. La secuencia de prelación de las operaciones: paréntesis, potencias, productos y
4

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
cocientes y sumas y restas. 2. Para operar tendremos que poner la primitiva escribe seguido de la operación oargumento en la zona del área de trabajo. El resultado aparecerá en la zona de textos.3. La raíz cuadrada se calcula mediante la opción: escribe sqrt 2. o raizcuadrada 24. Otras funciones son:
a. cociente 5 2 --------- 2.5b. ln 2 --------------------- calcula su logaritmo neperiano.c. sen 45, cos 45 y tan 45 ------------------- calcula su seno, coseno y tangente.d. arctan 1 ------------------------------ calcula su arco tangente que toma valor 45ºe. Pi , da el valor de 3,14.....f. abs -------------------------- establece el valor absoluto de un número.g. azar 8 ----------escribe un número al azar entre 0 y el 7h. exp 2 ----------calcula el valor de e2.I potencia 2 2 ----------------- determina el valor 4j Suma 2 2-------------------- establece el valor 4k resto 4 2 -------------------determina el valor de cero (resto de la división).
5. Controladoras e interfaces de control.
La controladora Micro-Log.
La tarjeta de Micro-log es del tipo M4007 . Puede ser programada tanto en el MSWlogo ocon el VisualBASIC. Es una tarjeta de las denominadas pasivas, pues no proporcionan fuente dealimentación.
La alimentación se realiza mediante una fuente de alimentación de 12 V en DC .
Las características de esta tarjeta son las siguientes:
1. Entradas analógicas : el número de canales que se dispone es de 2 (A1 y A2). La entradase realiza por una tensión variable de 0 a 5 V de DC.2. Entradas digitales : el número de canales es de 4 (I1, I2, I3, I4). La tensión 0 V supone elestado 0; la tensión 5 V supone el estado 1.3. Salidas digitales : el número de canales es de 4 (D1, D2, D3, D4). La tensión 0 V, indicael estado 0 y la tensión 5 V indica el estado 1.4. Salidas de Relés : el número de canales es de 2 (R1 y R2) .5 Salidas de motor : el número de canales es de 2 (M1 y M2). El canal M1 en un controlbidireccional, con variación de la velocidad y sentido de giro del motor. El canal M2 estambién bidireccional, con variación en el sentido del motor.El sistema de comunicación es mediante un puerto COM, RS232 de 9600 baudios develocidad de transmisión.
La tarjeta controladora tiene el siguiente aspecto:
5

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
1. Circuito de salida de relés.
6

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
PROGRAMA:
Para RelesLocal “ehaz “reles (matriz 2)inicializar_reles :relesacción_rele 1 “on :relesespera 30acción_rele 1 “off :relesespera 30acción_rele 2 “on :relesespera 120acción_rele 2 “off :reles
fin
Con este programa indicamos que el zumbador ha de funcionar durante medio segundo,después se mantiene en silencio durante medio segundo; a continuación se enciende la lámparadurante 2 segundos y termina el procedimiento.
El segundo circuito va a controlar el funcionamiento de sendos motores, sabiendo que en elmotor conectado a la salida M1, se puede controlar su velocidad.
7

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
PROGRAMA.
Para motoreslocal “numerohaz “numero 1local “velocidadhaz “velocidad 160haz “estado “derechalocal “motoreshaz “motores (matriz 2)inicializar_motores :motoresaccion_motor :numero :estado :motores :velocidadespera 180accion_motor :numero “off :motores :velocidadaccion_motor 2 “izqierda :motores espera 180accion_motor 2 “off :motores
finCon este programa se activa el motor uno a la velocidad 160 (la máxima velocidad es de 255).girando a la derecha durante 3 segundos. A continuación funciona el motor 2, girando a la izquierda,también durante 3 segundos.
El tercer circuito va a permitir, mediante las salidas digitales, controlar el funcionamiento deun display.
8
Encabezamiento
Inicio
Actividad

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
PROGRAMA.
Para displaylocal “numerohaz “numero 1haz “estado “onlocal “sdigitalhaz “sdigital (matriz 4)repite 4[inicializar_salidas_digitales :sdigitalaccion_salida_digital :numero :estado :sdigitalespera 180accion_salida_digital :numero “off :sdigitalespera 180accion_salida_digital 2 “on :sdigitalespera 120accion_salida_digital 2 “off :sdigitalaccion_salida_digital 3 “on :sdigitalespera 120accion_salida_digital 3 “off :sdigitalaccion_salida_digital 4 “on :sdigitalespera 120accion_salida_digital 4 “off :sdigital]
fin
En resumen las controladoras poseen los siguientes componentes:
Salidas digitales, que pueden ser activas, que proporcionan corriente(Investrónica) ypasivas, que no proporcionan corriente ( Micro-Log).Entradas digitales, que reciben señales eléctricas de 1 o 0, de sensores conectados a ellas.Entradas analógicas reciben señales eléctricas variables de los sensores conectados a ellas(LDR, termistores, etc )Salidas analógicas, permiten transmitir potencias variables dentro de un determinado rango.
La conexión del ordenador se realiza mediante una serie de puertos (COM o LPT) y la toma deenergía se hace mediante una fuente de alimentación que proporciona DC a diferentes tensiones,según cual sea la controladora.
9

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
6. Interfaces de control y programación.
Las tarjetas controladoras son dispositivos intermedios que captan la información recibidade los sensores y ejecuta las órdenes que establece el ordenador utilizando un determinadoprograma. La forma de comunicarse con el ordenador para realizar la programación es lo que sedenomina la interfaz.
Existen interfaces en forma de iconos o esquemáticos u otros, como es el caso e lascontroladoras que vamos a usar, que el interfaz es el propio de la programación de alto nivel(LOGO o BASIC).
7. Codificación de programas.
Cada lenguaje de alto nivel, posee instrucciones específicas para el funcionamiento de cadauna de las tarjetas controladoras.
Básicamente, se trabaja con:1. variables que puede ser numérica, alfanumérica o booleana.2. Constantes, cuando el valor es constante en todo el programa o procedimiento.3. Comandos o instrucciones, que están formados por cada una de las lineas del
programa o procedimiento.
Lagunas de las instrucciones más utilizadas son las siguientes:
Tarjeta Comando o instrucción Acción que realiza
Micro-LOG inicializar_Salidas_Digitales :Sdigital
accion_Salida_digital 1 “on :Sdigital
accion_Salida_Digital 1 “off :Sdigital
Para activar una salida, hay queponer a cero las instruccionesanteriores mediante el primercomando y después activar ydesactivar la salida digital número 1.
Para introducir una variable se realiza mediante la instrucción:
Haz “numero 1
El final del procedimiento o programa se realiza mediante FIN y se comienza con lainstrucción: para relés (nombre del programa).
Para indicar que un comando debe actuar durante un determinado tiempo, se utiliza lainstrucción Espera (n/60) , en segundos. Si se indica ESPERA 120, significa que la instrucción vaa durar 2 segundos.
8. Los diagramas de flujo para representar un programa.
Para realizar la programación de la forma más sencilla, se recurre a los diagramas de flujo;la unión entre los diferentes símbolos se utilizan los conectores.
Algunos de los símbolos empleados para el diagrama de flujo son los siguientes:
10

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
Las acciones básicas de una controladora es accionar sus salidas y analizar el estado de susentradas
Como ejemplo de aplicación de un diagrama de flujo se va a representar un programa : Se vaa realizar un programa que calcule la media de una serie de datos que no pasen de 1000 y que lasuma no supere de 1000000.
La variable del dato es D y la suma será S = S + D
El diagrama representado es el siguiente:
11
Inicio del bucle
Fin bucle

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
12
Instruccionespantalla
Desde N = 0 hasta 1000
Leer Dato
Siguiente N

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
PROGRAMA EN LOGO .-para talla :N :Shaz “N :N + 1es :Nes [introduce la talla en cm]haz “D LPes :Dhaz “ S :S + :Des :Ssi :D<999 [talla :N :S]haz “M :S / :Nes(frase[la media de la población tallada es] :M “cm )fin
8.- Otras variables Micro-log
Sdigitales Salidas digitales
Ent (1 o 2 ) Entradas digitales
Sanalogicas Entradas analógicas
Programa con Entradas Digitales.
para entradalocal “ent1local “ent2haz “reles (matriz 2)haz “ent2 “offinicializar_reles :relesmientras [ :ent2 = “off][haz “ent1 (estado_entrada_digital 1)sisino :ent1 = “on [accion_rele1 “on :reles][accion_rele1 “off :reles]haz “ent2 (estado_entrada_digital2)]
fin
Programa para entradas analógicas
para contarhaz “contador 0haz “dato 0mientras [ :contador <1000][haz “datos (leer_entrada_analogica 2)muestra :datoshaz “contador (suma :contador1)]
fin
13

TECNOLOGÍA 4º ESO. TEMA 5 CONTROL POR ORDENADOR.
14


















