Technical Memorandum - Inspiring Innovation · controlled by the master node. Typically, these...
57
Technical Memorandum Strong Mobile Agent Architecture based on the Beowulf System Written and Prepared by Sungwoo Tak Passakon Prathombutr Donghoon Lee E.K. Park Jerrold Stach
Transcript of Technical Memorandum - Inspiring Innovation · controlled by the master node. Typically, these...

Technical Memorandum Strong Mobile Agent Architecture based on the
Beowulf System
Written and Prepared by
Sungwoo Tak
Passakon Prathombutr
Donghoon Lee
E.K. Park
Jerrold Stach

i
Table of Contents
1 Beowulf Architectures....................................................................................1
1.1 Introduction.............................................................................................1 1.1.1 Beowulf System Software ...............................................................1 1.1.2 Scyld Beowulf System Software......................................................3
1.2 BPROC (Beowulf Distributed Process Space) .......................................3 1.2.1 Goal.................................................................................................4 1.2.2 Overview .........................................................................................4 1.2.3 Ghost processes .............................................................................5
1.3 MPI (Message Passing Interface) ..........................................................6 1.4 Current projects related to Beowulf ........................................................8
2 Distributed Software Tools for Process Migration........................................10 2.1 CONDOR .............................................................................................10
2.1.1 Features of Condor .......................................................................11 2.1.2 Condor Architecture ......................................................................12 2.1.3 Condor Daemons ..........................................................................14 2.1.4 Submitting Different Types of Jobs: Alternative Universes............17
2.2 MAUI ....................................................................................................18 2.2.1 Brief history ...................................................................................18 2.2.2 Maui Features ...............................................................................18
2.3 MOSIX..................................................................................................20 2.4 SPRITE ................................................................................................22 2.5 Comparison of Implementations...........................................................22
2.5.1 MOSIX...........................................................................................23 2.5.2 CONDOR ......................................................................................23 2.5.3 SPRITE .........................................................................................24 2.5.4 Specific Design Decisions .............................................................24
3 Virtual File Systems.....................................................................................28 4 Design Strong Mobility Environment............................................................31
4.1 Mobility .................................................................................................31 4.1.1 Weak Mobility ................................................................................33 4.1.2 Strong Mobility...............................................................................33
4.2 Analysis of Existing Softwares..............................................................35 4.2.1 MPI................................................................................................36 4.2.2 BPROC .........................................................................................38 4.2.3 CONDOR ......................................................................................45 4.2.4 MAUI .............................................................................................50 4.2.5 PVFS.............................................................................................50
References .........................................................................................................53

1
1 Beowulf Architectures
1.1 Introduction
Beowulf is a multi-computer architecture which can be used for parallel
computations. A Beowulf cluster is a computer system conforming to the Beowulf
architecture, which consists of one master node and one or more compute nodes. The
nodes are connected together via Ethernet or some other network, and are typically built
using commodity hardware components, such as any PC capable of running Linux and
standard Ethernet adapters. The nodes usually do not contain any custom hardware
components and are trivially reproducible. The master node controls the entire cluster and
serves parallel jobs and their required files to the compute nodes. The master node is
typically the cluster’s administration console and its gateway to the outside world. In
most cases the compute nodes in a Beowulf cluster are "dumb", they are configured and
controlled by the master node. Typically, these compute nodes do not have keyboards or
monitors and are accessed remotely from the master node. Simply put, Beowulf is a
technology of clustering Linux computers together to form a parallel, virtual
supercomputer, a Beowulf cluster. While Linux-based Beowulf clusters provide a cost
effective hardware alternative to the supercomputers of the past for high performance
computing applications, the original software implementations for Linux Beowulfs were
not without their problems [1].
1.1.1 Beowulf System Software
[2] reports the components of Beowulf system software.
� BPROC: Beowulf Distributed Process Space
This packages allows a process ID space to span multiple nodes in a cluster
environment and also provides mechanisms for starting processes on other nodes. (This
package is for Linux 2.2.x kernels.) ��Network Device Drivers
We have long contributed to the development of the Linux networking code. Many
of the Linux ethernet device drivers, and most of the device drivers for cost-effective

2
high-performance network adapters were written by Donald Becker at CESDIS. A large
portion of his time goes into maintaining and enhancing the performance of these device
drivers. Fast Ethernet has long been a cluster staple, while Gigabit Ethernet has recently
been tested.
� Beowulf Ethernet Channel Bonding
One of the goals of the goals of the Beowulf project is to demonstrate scalable I/O
using commodity subsystems. For scaling network I/O we devised a method to join
multiple low-cost networks into a single logical network with higher bandwidth.
� PVM-TCL
A set of extensions to TCL that allow you to manipulate the PVM virtual machine
directly. NOTE: This currently does not extend the message-passing calls to TCL, just
the PVM configuration ones. One could, however, implement them from the base
provided here.
� Virtual Memory Pre-Pager
A loadable kernel module for Linux 2.0 that implements a non-blocking page read
in system call. With the proper run-time support, this new system call can dramatically
reduce the run-time of "out-of-core" programs (programs that have data sets larger than
the available physical memory) by allowing multiple pages to be read from disk prior to
their actual use. ��PPro Performance Counter Patches
Kernel patches (for 2.0.36, 2.2.2 and 2.2.9) and a small library to add kernel support
for the performance counters found in the Pentium Pro and Pentium II.
� LM78 Hardware Monitor Driver
A loadable kernel module for Linux 2.0 and 2.1 that provides a /proc interface for
the LM78 Hardware Monitor. (Note: This driver speaks to the hardware monitors via the
ISA interface. This driver does not support boards that only have the serial interface on
the hardware monitor connected.)
� Intel PR440FX Netbooting Tools
Tools to assist with netbooting from built in network interface on the Intel
PR440FX and possibly other AMI Bios motherboards.

3
1.1.2 Scyld Beowulf System Software
The following is a list of the major software components distributed with the Scyld
Beowulf Cluster Operating System [1]. _ �
bproc - the Beowulf process migration technology; an integral part of Scyld
Beowulf _
�beosetup - a GUI interface for configuring the cluster_
�beostatus - a GUI interface for monitoring cluster status_
�beostat - a text-based tool for monitoring cluster status_
� beoboot - a set of utilities for booting the compute nodes_
� beofdisk - a utility for remote partitioning of hard disks on the compute nodes_
� beoserv - the beoboot server; it responds to compute nodes and serves the boot
image_
� bpmaster - the bproc master daemon; it only runs on the master node_
�bpslave - the bproc compute daemon; it runs on each of the compute nodes_
�bpstat - a bproc client; it maintains status information for all nodes in the cluster_
�bpctl - a bproc client; a command line mechanism for controlling the nodes_
� bpsh - a bproc client; a replacement utility for "rsh" (remote shell)_
� bpcp - a bproc client; a mechanism for copying files between nodes_
�beompi - the Message Passing Interface; optimized for use with Scyld Beowulf _
�beopvm - the Parallel Virtual Machine; optimized for use with Scyld Beowulf _
mpprun - a parallel job creation package for Scyld Beowulf _
perf - support for platform specific hardware performance counters
1.2 BPROC (Beowulf Distributed Process Space)
Scyld Beowulf is able to provide a single system image through its use of BProc,
the Beowulf cluster process management kernel enhancement. BProc enables the
processes running on cluster compute nodes to be visible and manageable on the master
node. Processes start on the master node and are migrated to the appropriate compute
node by BProc. Process parent-child relationships and UNIX job control information are
both maintained with migrated tasks. Because cluster compute nodes are not required to

4
contain resident applications, their hard disks are available for application data and cache.
This approach eliminates both the need to have full installations on the compute nodes
and the version skew problem common with previous generation cluster software.
Shortly, BPROC provides a mechanism to start processes on remote hosts while keeping
them visible in the process tree on the front end of a cluster.
Bproc aims to provide a single process space within the tightly controlled environment of
a beowulf cluster. Bproc doesn't address resource allocation or load balancing at all.
Bproc should avoid most if not all of the performance penalties associated with Mosix
style migration.
1.2.1 Goal
The goal of Bproc is to provide key elements needed for a single system image on
Beowulf cluster. Currently Beowulf style clusters still look like a collection of PC's on a
network. Once logged into the front end of the cluster, the only way to start processes on
other nodes in the system is via rsh. MPI and PVM hide this detail from the user but users
but it's still there when either of them starts up. Cleaning up after jobs is often made
tedious by this as well, especially when the jobs are misbehaving.
The bproc distributed PID space (bproc) addresses these issues by providing a
mechanism to start processes on remote nodes without ever logging into another node
and by making all the remote processes visible in the process table of the cluster's front-
end node. The hope is that this will eliminate the need for people to be able to login on
the nodes of a cluster.
Bproc can play a role of “Global Naming Scheme” in the mobile agent architecture. It
can provide the environment of weak mobility in mobile software architectures.
1.2.2 Overview
BPROC introduces a distributed process ID (PID) space. This allows a node to run
processes which appear in its process tree even though the processes are physically
present on other nodes. The remote processes also appear to be part of the PID space of
the front end node and not the node which they are running on. The node which is
distributing its pid space is called the master and other nodes running processes for the

5
master are the slaves. Each PID space has exactly one master and zero or more slaves.
Each PID space corresponds to a real PID space on some machine. Therefore, each
machine can be the master of only one PID space. A single machine can be a slave in
more than one PID space.
1.2.3 Ghost processes
Remote NodeOperating System #1
Front-End NodeOperating System
Ghost Process #1(Kernel Thread)
Real Process #1(Kernel Thread)
bproc_rexec/bproc_move/bproc_rfork/bproc_execmove
Signal
Signal
Generate New PIDChildProces
s
Fork
Transmit/Receive Signal
User View
Remote NodeOperating System #2
Real Process #2(Kernel Thread)
Signal
ChildProces
s
ForkGenerate New PID
Transmit/Receive Signal
bproc_rexec/bproc_move/bproc_rfork/bproc_execmove
Ghost Process #2(Kernel Thread)
Master DaemonSlave Daemon
Slave Daemon
MPI
Figure 1. Brpoc Architecture
Remote processes on are represented on the master node by "ghost" processes.
These are kernel threads like any other kernel thread on the system (i.e. nfsiod, kswapd,
etc). They have no memory space, open files, or file system context but they can wake up
for signals or other events and do things in kernel space. Using these threads, the existing
signal handling code and process management code remains unchanged. Ghosts perform
these basic functions:

6
� Signals they receive are forwarded to the real processes they represent. Since they
are kernel threads, even SIGKILL and SIGSTOP can be caught and forwarded
without destroying or stopping the ghost..
� When the remote process exits it will forward its exit code back to the ghost and the
ghost will also exit with the same code. This allows other processes to wait() and
receive meaningful exit status for remote processes.
� When a remote process wants to fork, it will need to obtain a PID for the new child
process from the master node. This is obtained by asking the ghost process to fork
and return the PID of the new child ghost process. (This also keeps the parent-child
relationships in sync.)
� When a remote process waits on a child, the ghost will do the same. This prevents
accumulation of ghost zombies and keeps the process trees in sync.
1.3 MPI (Message Passing Interface)
MPI is a library specification for writing message-passing programs for parallel
computers, clusters and heterogeneous networks e.g., a Beowulf where parallel
programming requires the MPI library run on a cluster. The MPI provides library of
message-passing programs written in C, C++ or Fortran across a various heterogeneous
parallel architectures.
The MPI becomes a de facto standard for portable message-passing parallel
programs standardized by the MPI Forum and available on all massively-parallel
supercomputers. The MPI forum designs the base set of routines that ones can
implement efficiently, practical, portable, efficient, and flexible. The current version of
MPI is MPI-2 which is open to public at http://www.mcs.anl.gov/mpi . The vendors that
implements MPI include IBM, Intel, TMC, Meiko, Cray, Convex and Ncube.
The MPI contains point-to-point message passing, collective communication,
support for process groups, support for communication contexts, support for application
topologies, environmental inquiry routines, profiling interface and error control. The
MPI is primarily for SPMD/MIMD parallel architectures but there is no mechanism for
loading code onto processors, or assigning processes to processors or creating/destroying

7
processes. Besides, the MPI does not provide remote memory transfers, multithreading
and virtual shared memory but it is designed to be thread-safe.
In MPI, a process is defined in a group and a rank (a unique integer for labeling
each process in the group). Process groups can be created and destroyed. A message
label is specified by a context and a corresponding tag. In a point-to-point
communication, it is a communication between pairs of processes. The Message
selectivity is by rank and tag. In Collective communication, it involves all processes in
the scope of the communication specified by the communicator. The collective
communication routines do not take message tag arguments.
The feature of MPI includes six basic functions and 125 extension functions. The
six basic functions are
� MPI_Init – start MPI.
� MPI_Finalize – exit MPI.
� MPI_Comm_size – the number of processes.
� MPI_Comm_rank – a number between zero and size-1. �
MPI_Bcast – this routine sends data from one process to all others. �
MPI_Reduce – this routine combines data from all processes and returning the result
to a single process.
The implemented software versions of MPI include MPICH [3] and LAM [4].
They are widely deployed in the researches.
The MPICH is an open-source, portable implementation of the Message-Passing
Interface Standard libraries. It contains a complete implementation of version 1.2 of the
MPI Standard and also significant parts of MPI-2, particularly in the area of parallel I/O.
MPICH is developed under Mathematics and Computer Science Division Argonne
National Laboratory. The current version is 1.2.3 (January 2002) [3]. The MPICH is
available in all UNIX and Window NT/2000 platforms.
The LAM (Local Area Multicomputer) is an MPI programming environment and
development system for heterogeneous computers on a network. With LAM, a dedicated

8
cluster or an existing network computing infrastructure can act as one parallel computer
solving one problem. LAM features extensive debugging support in the application
development cycle and peak performance for production applications. LAM features a
full implementation of the MPI communication standard [4]. The LAM is developed at
the Ohio Supercomputer, the University of Notre Dame.
1.4 Current projects related to Beowulf
The hybrid cluster computing is the computing based on the platform of hybrid
clusters, which is the computer cluster consisting of both the stationary and mobile
computers, interconnected by wireless and wired networks [5]. It implements a prototype
for the hybrid cluster computer with Java mobile objects and the mobile IP. It studies the
performance on the trade-off between the communication load and the computational
load.
Mobile agents (MA) are of growing interest as base for distributed and parallel
applications to achieve an efficient utilization of cluster systems. The MAs are mobile
and autonomous SW units that can execute tasks given to the system and allocate
independently all the needed resources. However, with growth of cluster sizes, the
probability of a failure of system components increases. Holger Pals, Stefan Petri, and
Claus Grewe [6] conducted the Fault Tolerance for Mobile Agents in Clusters
(FANTOMAS). It focused on the failure of one or more system components and the loss
of mobile agents. The FANTOMAS concept has been derived to offer a user transparent
fault tolerance that can be activated on request, according to the needs of the task.
Another paper introduces a new SW system model for improving the performance
of parallel and distributed applications adaptively and on a real-time base, using
intelligent agents as adaptive controllers [7]. These intelligent agents are responsible for
collecting and analyzing the performance parameters and metrics, and deciding on the
required modification.
[8] develops the Scalable Computing Environment (SCE). The SCE is the Software
(SW) tool with a cluster builder tool, complex system mgmt tool (SCMS), scalable real-
time monitoring, web based monitoring SW (KCAP), parallel Unix command, and batch
scheduler (SQMS).

9
Mobile agent techniques for autonomous data process and information discovery on
the Synthetic Aperture Radar Atlas (SARA) digital library enable automatic and dynamic
configuration of distributed parallel computing and support on-demand processing of
such a remote-sensing archive efficiently [9]. It provides the architecture design and
implementation status of the prototype system.
Another attempt to implement the MAs system on Beowulf Cluster has been
reported at the Electrical Engineering Conference (EECON-22) in 1999. It has deployed
on the SMILE Beowulf Cluster environment [10].

10
2 Distributed Software Tools for Process Migration
��Problem Definition
Given a mobile agent application in which each agent has to visit multiple resources
in order to complete a task, find a schedule for giving agents access to resources that
optimizes the system throughput
� Introduction
Mobile-agent, multi-agent, multi-resource scheduling has some similarities with
scheduling in traditional computing environments, but there are major differences. Many
assumptions used in traditional scheduling algorithms become unrealistic in the context
of mobile agent systems, which are characterized by large data-transfer delay, diversified
network links and a wide spectrum of machine speeds. Scheduling algorithms for a
mobile-agent system must work in a heterogeneous environment where
(1) the number of machines is limited;
(2) the task graph structure is general;
(3) the data transfer delay is general; and
(4) the task duplication is not allowed.
This problem is NP-complete. ��A hierarchical scheduling framework in heterogeneous environment.
� Algorithms for scheduling multi-task
The objective is to optimize the system throughput. The algorithms work in
heterogeneous networks in that they assume different host speeds and different data
transfer and communication delays between host pairs. They developed both centralized
and distributed algorithms. The centralized algorithm has a provable performance bound
and is used as a module in the distributed scheduler.
2.1 CONDOR
Condor is sophisticated and unique distributed job scheduler developed by the
condor research project at the University of Wisconsin-Madison Department of Computer
Sciences. Condor exists to address problems of resource allocation over very large

11
numbers of systems owned by different people. It includes some process migration
capabilities as well [12].
2.1.1 Features of Condor
� Checkpoint and migration.
Where programs can be linked with Condor libaries, users of Condor may be
assured that their jobs will eventually complete, even in the ever changing environment
that Condor utilizes. As a machine running a job submitted to Condor becomes
unavailable, the job can be checkpointed. The job may continue after migrating to
another machine. Condor's periodic checkpoint feature periodically checkpoints a job
even in lieu of migration in order to safeguard the accumulated computation time on a job
from being lost in the event of a system failure such as the machine being shutdown or a
crash. �
Remote system calls.
Despite running jobs on remote machines, the Condor standard universe execution
mode preserves the local execution environment via remote system calls. Users do not
have to worry about making data files available to remote workstations or even obtaining
a login account on remote workstations before Condor executes their programs there. The
program behaves under Condor as if it were running as the user that submitted the job on
the workstation where it was originally submitted, no matter on which machine it really
ends up executing on.
� No Changes Necessary to User's Source Code.
No special programming is required to use Condor. Condor is able to run non-
interactive programs. The checkpoint and migration of programs by Condor is transparent
and automatic, as is the use of remote system calls. If these facilities are desired, the user
only re-links the program. The code is neither recompiled nor changed.
� Pools of machines can be hooked together.
Flocking is a feature of Condor that allows jobs submitted within a first pool of
Condor machines to execute on a second pool. The mechanism is flexible, following
requests from the job submission, while allowing the second pool, or a subset of

12
machines within the second pool to set policies over the conditions under which jobs are
executed.
� Jobs can be ordered.
The ordering of job execution required by dependencies among jobs in a set is
easily handled. The set of jobs is specified using a directed acyclic graph, where each job
is a node in the graph. Jobs are submitted to Condor following the dependencies given by
the graph.
� Sensitive to the desires of machine owners.
The owner of a machine has complete priority over the use of the machine. An
owner is generally happy to let others compute on the machine while it is idle, but wants
it back promptly upon returning. The owner does not want to take special action to regain
control. Condor handles this automatically.
� ClassAds.
The ClassAd mechanism in Condor provides an extremely flexible, expressive
framework for matchmaking resource requests with resource offers. Users can easily
request both job requirements and job desires. For example, a user can require that a job
run on a machine with 64 Mbytes of RAM, but state a preference for 128 Mbytes, if
available. A workstation owner can state a preference that the workstation runs jobs from
a specified set of users. The owner can also require that there be no interactive
workstation activity detectable at certain hours before Condor could start a job. Job
requirements/preferences and resource availability constraints can be described in terms
of powerful expressions, resulting in Condor's adaptation to nearly any desired policy.
Figure 2: An Example of ClassAd
2.1.2 Condor Architecture

13
A Condor pool is comprised of a single machine that serves as the central manager,
and an arbitrary number of other machines that have joined the pool. Conceptually, the
pool is a collection of resources (machines) and resource requests (jobs). The role of
Condor is to match waiting requests with available resources. Every part of Condor sends
periodic updates to the central manager, the centralized repository of information about
the state of the pool. Periodically, the central manager assesses the current state of the
pool and tries to match pending requests with the appropriate resources. �
Central Manager
There can be only one central manager for your pool. The machine is the collector
This machine plays a very important part in the Condor pool and should be reliable. If
this machine crashes, no further matchmaking can be performed within the Condor
system (although all current matches remain in effect until they are broken by either party
involved in the match). Therefore, choose for central manager a machine that is likely to
be online all the time, or at least one that will be rebooted quickly if something goes
wrong. The central manager will ideally have a good network connection to all the
machines in your pool, since they all send updates over the network to the central
manager. All queries go to the central manager. �
Execute
Any machine in your pool (including your Central Manager) can be configured for
whether or not it should execute Condor jobs. Obviously, some of your machines will
have to serve this function or your pool won't be very useful. Being an execute machine
doesn't require many resources at all. About the only resource that might matter is disk
space, since if the remote job dumps core, that file is first dumped to the local disk of the
execute machine before being sent back to the submit machine for the owner of the job.
However, if there isn't much disk space, Condor will simply limit the size of the core file
that a remote job will drop. In general the more resources a machine has (swap space, real
memory, CPU speed, etc.) the larger the resource requests it can serve. However, if there
are requests that don't require many resources, any machine in your pool could serve
them.
� Submit

14
Any machine in your pool (including your Central Manager) can be configured for
whether or not it should allow Condor jobs to be submitted. The resource requirements
for a submit machine are actually much greater than the resource requirements for an
execute machine. First of all, every job that you submit that is currently running on a
remote machine generates another process on your submit machine. So, if you have lots
of jobs running, you will need a fair amount of swap space and/or real memory. In
addition all the checkpoint files from your jobs are stored on the local disk of the machine
you submit from. Therefore, if your jobs have a large memory image and you submit a lot
of them, you will need a lot of disk space to hold these files. This disk space requirement
can be somewhat alleviated with a checkpoint server (described below), however the
binaries of the jobs you submit are still stored on the submit machine. �
Checkpoint Server
One machine in your pool can be configured as a checkpoint server. This is
optional, and is not part of the standard Condor binary distribution. The checkpoint server
is a centralized machine that stores all the checkpoint files for the jobs submitted in your
pool. This machine should have lots of disk space and a good network connection to the
rest of your pool, as the traffic can be quite heavy. Now that you know the various roles a
machine can play in a Condor pool, we will describe the actual daemons within Condor
that implement these functions.
2.1.3 Condor Daemons
The following list describes all the daemons and programs that could be started
under Condor and what they do:
� condor_master
This daemon is responsible for keeping all the rest of the Condor daemons running
on each machine in your pool. It spawns the other daemons, and periodically checks to
see if there are new binaries installed for any of them. If there are, the master will restart
the affected daemons. In addition, if any daemon crashes, the master will send e-mail to
the Condor Administrator of your pool and restart the daemon. The condor_master also
supports various administrative commands that let you start, stop or reconfigure daemons

15
remotely. The condor_master will run on every machine in your Condor pool, regardless
of what functions each machine are performing. �
condor_startd
This daemon represents a given resource (namely, a machine capable of running
jobs) to the Condor pool. It advertises certain attributes about that resource that are used
to match it with pending resource requests. The startd will run on any machine in your
pool that you wish to be able to execute jobs. It is responsible for enforcing the policy
that resource owners configure which determines under what conditions remote jobs will
be started, suspended, resumed, vacated, or killed. When the startd is ready to execute a
Condor job, it spawns the condor_starter, described below. �
condor_starter
This program is the entity that actually spawns the remote Condor job on a given
machine. It sets up the execution environment and monitors the job once it is running.
When a job completes, the starter notices this, sends back any status information to the
submitting machine, and exits.
� condor_schedd
This daemon represents resources requests to the Condor pool. Any machine that
you wish to allow users to submit jobs from needs to have a condor_schedd running.
When users submit jobs, they go to the schedd, where they are stored in the job queue,
which the schedd manages. Various tools to view and manipulate the job queue (such as
condor_submit, condor_q, or condor_rm) all must connect to the schedd to do their work.
If the schedd is down on a given machine, none of these commands will work.
The schedd advertises the number of waiting jobs in its job queue and is responsible
for claiming available resources to serve those requests. Once a schedd has been matched
with a given resource, the schedd spawns a condor_shadow (described below) to serve
that particular request. �
condor_shadow
This program runs on the machine where a given request was submitted and acts as
the resource manager for the request. Jobs that are linked for Condor's standard universe,
which perform remote system calls, do so via the condor_shadow. Any system call
performed on the remote execute machine is sent over the network, back to the
16
condor_shadow which actually performs the system call (such as file I/O) on the submit
machine, and the result is sent back over the network to the remote job. In addition, the
shadow is responsible for making decisions about the request (such as where checkpoint
files should be stored, how certain files should be accessed, etc).
��condor_collector
This daemon is responsible for collecting all the information about the status of a
Condor pool. All other daemons (except the negotiator) periodically send ClassAd
updates to the collector. These ClassAds contain all the information about the state of the
daemons, the resources they represent or resource requests in the pool (such as jobs that
have been submitted to a given schedd). The condor_status command can be used to
query the collector for specific information about various parts of Condor. In addition,
the Condor daemons themselves query the collector for important information, such as
what address to use for sending commands to a remote machine. �
condor_negotiator
This daemon is responsible for all the match-making within the Condor system.
Periodically, the negotiator begins a negotiation cycle, where it queries the collector for
the current state of all the resources in the pool. It contacts each schedd that has waiting
resource requests in priority order, and tries to match available resources with those
requests. The negotiator is responsible for enforcing user priorities in the system, where
the more resources a given user has claimed, the less priority they have to acquire more
resources. If a user with a better priority has jobs that are waiting to run, and resources
are claimed by a user with a worse priority, the negotiator can preempt that resource and
match it with the user with better priority.
� condor_kbdd
This daemon is only needed on Digital Unix and IRIX. On these platforms, the
condor_startd cannot determine console (keyboard or mouse) activity directly from the
system.
� condor_ckpt_server
This is the checkpoint server. It services requests to store and retrieve checkpoint
files. If your pool is configured to use a checkpoint server but that machine (or the server

17
itself is down) Condor will revert to sending the checkpoint files for a given job back to
the submit machine.
Figure 3: Condor Architecture
2.1.4 Submitting Different Types of Jobs: Alternative Universes
A Universe in condor defines an execution environment. Condor supports the
following Universes:
� Vanilla
� MPI: The MPI Universe allows parallel program written with MPI to be managed
by Condor
� PVM �
Globus �
Scheduler: DAGMan Scheduler �
Standard:
• Transparent process checkpoint and restart
• Transparent process migration
• Remote system calls
• Configurable file I/O buffering

18
2.2 MAUI
Maui is a batch scheduler capable of administrative control over resources, such as
processors, memory and disk, and workload. It allows a high degree of configuration in
the areas of job prioritization, scheduling, allocation, fairness, fairshare, QOS levels,
backfill and reservation policies. The Maui is an advance cluster schedule suited for high
performance computing (HPC) platforms including PC clustering like Beowulf. The
Maui itself is not a resource manager but it makes decisions by querying and controlling
a resource management system such as OpenPBS, PBSPro, Loadleveler, SGE, etc. For
example, the Maui may query jobs and nodes information from the PBS server and direct
PBS to manage job in response with specified Maui policies, priorities, and reservations.
In the PBS users’ view, the Maui is a set of external commands which provide additional
information and capabilities intended to improve the user's ability to run jobs “when”,
“where” , and “how” they want. It term of quality of service, Maui allows a user to
request improved job turnaround time, access to additional resources, or exemptions to
particular policies automatically
2.2.1 Brief history
The Maui scheduler was originally developed to be dependent on the IBM SP
Load-Leveler API. As interest in the Maui scheduler for Linux, IRIX, HP-UX and
Windows NT grew it was necessary either to write the interfaces to existing Resource
Managers, or the develop a Resource Manager (RM) specifically for the Maui Scheduler.
In 1998, a Maui High Performance Computing Center team started to develop a generic
resource manager called Wiki, from what was the Wiki RM. The Linux Resource
Manager development began at the Albuquerque High Performance Computing Center
and is know as the Linux Resource Manager. The Maui Scheduler is an advanced
reservation based High Performance Computing batch scheduler supported on SP, O2K,
and Linux clusters. It can be used to extend the functionality and improve the efficiency
of sites utilizing the PBS and Loadleveler batch system.
2.2.2 Maui Features

19
��Backfill
Backfill is one of scheduling approaches that allows user to run some jobs out of
the queue order as long as they do not delay the highest priority jobs in the queue. Each
job must be defined the estimate running time called wallclock limit. It is an estimation
of the elapsed time from start to finish of the job. Since the scheduler may be configured
to kill jobs which exceed their wallclock limits, it is often wise to slightly overestimate
this limit. With this information, it allows Maui to determine whether or not a high
priority job will be delayed. The more accurate the wallclock limit, the more 'holes' Maui
can find to start the desired job early.
The backfill increase the utilization and throughput because it schedules job to the
available resource for immediate use while decreasing the average job queue time. The
command showbf in the Maui is to show a backfill window i.e., showing the available
resources for immediate use. Users are able to configure a job that will be able to run as
soon as it is submitted by utilizing only available resources. �
Advance Reservations
Maui provides the advance reservations by reservation-specific access control list
(ACL) to specify the reserved resource and users who can use them. Also it allows setup
of timeframe for certain resources to be used in particular site. Maui will attempt to
locate the best possible combination of available resources whether these are reserved or
unreserved without forcing the job to utilize the resources. For example, in the figure
below, note that job X, which meets access criteria for both reservation A and B,
allocates a portion of its resources from each reservation and the remainder from
resources outside of both reservations.
A Job X B
A
B
20
Maui can configure jobs to be run within accessible reservations on a job-by-job
basis or by the QoS constraints depending on the policy. �
Quality of Service (QOS)
The Maui QOS features allow a site to grant special privileges to particular users
including the access to additional resources, exemptions from certain policies, the access
to special capabilities, and improved job prioritization.
� Statistics
The Maui statistics features allow users to track the data that determine how well
and how often their jobs are running. The showstats command provides detailed statistics
per user, per group, and per account basis. Besides, the command showgrid displays
various tables of scheduling or system performance. Therefore, user can determine what
types of jobs the gain the highest performance and tune the jobs to optimal turnaround
time.
��Diagnosis
The command checkjob in Maui allow users to view a detailed status report for each
submitted job. This command shows all job attribute and state information and analyze if
the job can run or not. If the job is unable to run, it will provide the reasons. Besides, the
Maui logs viewed by system administrator can reveal the detail why the job did not start. ��Workload Information
In order to manage the workload, Maui provides an extensive array of job
prioritization options for each site. Maui allows sites to control exactly how jobs run
through the job queue. Maui provides the showq command to show queued jobs, a
relevant listing of both active and idle jobs.
2.3 MOSIX
Bproc aims to provide a single system image similar to Mosix but does not attempt
to do Mosix style transparent process migration. Bproc will allow a process to migrate
from one node to another but this migration is not transparent or automatic. On the other
hand, bproc should avoid most if not all of the performance penalties associated with
Mosix style migration. �

21
MOSIX is a software module for supporting scalable cluster computing with Linux.
The core of MOSIX are kernel-level, adaptive load-balancing algorithms that are
designed to respond to variations in resource usage among the nodes by migrating
processes from one node to another (strong mobility), preemptively and transparently.
MOSIX allows a cluster of PCs to work cooperatively as if part of a single system [13].
There are two versions: a kernel patch (K-MOSIX) that can be applied to a specific Linux
kernel, and a user-level package (U-MOSIX) that can be used with different Unix
platforms.
Both versions are based on the same principles, and are geared to achieve even
work distribution and load balancing. K-MOSIX provides load-balancing by transparent
process migration. The application developer need only fork new processes. U-MOSIX
provides even load distribution using several of the algorithms of K-MOSIX.
[13] claims that MOSIX can support configurations with large numbers of
computers, with minimal scaling overheads to impair the performance. A low-end
includes several PCs by Ethernet, while a larger may include a large number of
workstations (SMP and non-SMP) and servers by higher speed LAN such as Gigabit-
Ethernet.
[14] is an procedural article to guide the user for installing and configuring MOSIX.
During the configuration, the terminology such as “Migration” is used in MOSIX that
gives the insight of MOSIX’s process mobility to other nodes. It continues with
installation MOSIX on the Development Machine and installation testing.
Another attempt to deploy MOSIX is pursued and reported by Jelmer Vernooij [15].
It tried to use Mosix with Linux Terminal Server Project (LTSP). The reason is given as
such that LTSP is to run remote X (Linux) without needing disks and MOSIX has the
capability to migrate processes to machines with a lower load. The procedure to install
MOSIX is detailed with some practical tips, gained at the project.
[16] presents one example of how clusters of MOSIX extension Linux systems
were used to eliminate a performance bottleneck and to reduce the cost of building
software. It concludes that this approach is beneficial to create high performance and
distributed build environments form commodity hardware and open source software.

22
Barak and La’adan [17] experienced the resource sharing that is geared for
performance scalability in a scalable computing cluster (CC), MOSIX over fast Ethernet
and the Myrinet LANs. Parallel applications can be executed by allowing MOSIX to
assign and reassign the processes to the best possible nodes. It demonstrated the low-cost,
scalable CC from commodity components, such as PC’s, UNIX and PVM.
2.4 SPRITE
Sprite was a UNIX-like distributed operating system developed at Berkeley from
1984 [18]. Processes run on a number of different machines, and had a number of
interesting features, such as load-balancing, a high-speed, aggressively-caching,
distributed file-system, and a fast log-structured local file-system.
Sprite [19] provides transparent process migration to allow load sharing. It provides
a UNIX like system call interface. Each process appears to run on a single host node, but
physically to execute on a different machine. [20] presents the implementation of a
SPRITE system to provide the transparent process migration of processes. The simulated
results reside in migration, load sharing over distributed systems. [21] estimates the
performance measurements, especially on a multiprocessor Sprite kernel. Variety of
macro- and micro-benchmarks were taken in place for this matter.
K. Shirriff [22] implemented of memory sharing and file mapping of 4.2 BSD Unix
to Sprite with user-level control over paging. In the report, he stated two limited sharing
capabilities: code and heap segments while having separate stacks. Mach model is similar
in this matter of execution in a single address space. In addition, some of his effort has
exhibited in collecting the reference of Sprite papers [23].
Despite the kernel level dynamic load balancing in a cluster system such as Sprite,
[24] suggests to provide a high-level and portable implementation of migratable Java
threads over Java Virtual Machine.
2.5 Comparison of Implementations
In this section we will explore some of the similarities and differences in the design
decisions among several systems that support process migration. Specifically, we will

23
examine MOSIX, developed at the Hebrew University of Jerusalem, Israel; Condor,
developed at the University of Wisconsin-Madison; and Sprite, developed at the
University of California at Berkeley. Condor, MOSIX, and Sprite appear similar on the
surface in that they all have implemented a process migration. Underneath, however,
each of the three systems is trying to solve a different problem. The design decisions that
went into the systems are necessarily different, because the designs were based on
different assumptions. Each of these decisions is discussed in more detail below.
2.5.1 MOSIX
MOSIX might be best described as an attempt to create a low-cost equivalent of a
scalable, SMP (multi-CPU) server. In an SMP system such as the Digital Alpha Server or
SGI Challenge, multiple CPUs are tightly coupled, and the operating system can do very
fine-grained load balancing across those CPUs. In an SMP, any job can be scheduled to
any processor with virtually no overhead. MOSIX, similarly, attempts to implement very
low-overhead process migration so that the multicomputer, taken as a whole, might be
capable of fine-grained load balancing akin to an SMP. The MOSIX designers have
expended a great deal of effort implementing very fast network protocols, optimizing
network device drivers, and doing other analyses to push the performance of their
network as far as possible.
Also in line with the SMP model, MOSIX goes to great lengths to maintain the
same semantics of a centralized OS from the point of view of both processes and users.
Even when a process migrates, signal semantics remain the same, IPC channels such as
pipes and TCP/IP sockets can still be used, and the process still appears to be on its
“home node” according to programs such as ps .
As a result, the MOSIX implementation typically takes the form of a “pool of
processors”--a large number of CPUs dedicated to acting as migration targets for high-
throughput scientific computing. Although MOSIX can be used to borrow idle cycles
from unused desktop workstations, that mode of operation is not its primary focus.
2.5.2 CONDOR

24
In contrast, Condor's primary motivation for process migration seems to be to
provide a graceful way for processes that were using idle CPU cycles on a foreign
machine to be evicted from that machine when it is no longer idle. They made many
simplifying assumptions; for example, that the remotely-executing processes will be
running in a vacuum, not requir ing contact with other processes via IPC channels.
Their migration strategy does not provide a fully transparent migration model;
processes ``know'' that they are running on a foreign machine, and the home
machine has no record of the process' existence. These assumptions, while more
limiting than the MOSIX model, do buy a fair amount of simplicity: Condor 's designers
were able to implement its process migration without modifying the kernel.
2.5.3 SPRITE
In motivation, Sprite seems to be a cross between Condor and MOSIX. Like
MOSIX, Sprite strives for a very pure migration model--one in which the semantics of
the process are almost exactly the same as if the process had been running locally. IPC
channels, signal semantics, and error transparency are all important to the Sprite design.
However, their migration policy is much more akin to Condor's. Similar to Condor, they
seem primarily motivated by the desire to gracefully evict processes from machines
which are no longer idle. When processes are first created with exec(), they are migrated
to idle workstations if possible; later, they are migrated again only if the workstation
owner returns and evicts the process. Unlike MOSIX, Sprite has no desire to dynamically
re-balance the load on systems once processes have been assigned to processors.
2.5.4 Specific Design Decisions
In this section, we will explore some of the specific design decisions of the three
systems in more detail.
2.5.4.1 User Space vs. Kernel Implementation
Sprite and MOSIX both involve extensive modifications to their respective kernels
to support process migration. Amazingly, Condor is a process migration scheme that
is implemented in user-space. Although no source code changes are necessary, users

25
do need to link their programs with Condor 's process migration library. The library
intercepts cer tain system calls in cases where it needs to record state about the
system call. The library also sets up a signal handler so that it can respond to signals
from daemons running on the machines, telling it to checkpoint itself and terminate.
2.5.4.2 Centralized vs. Distributed Control
Condor and Spr ite both rely on a centralized controller , which limits those
systems' scalability and introduces a single point of failure for the entire system. In
contrast, MOSIX nodes are all autonomous, and each uses a novel probabilistic
information distribution algorithm to gather information from a randomly selected (small)
subset of the other nodes in the system. This makes MOSIX much more scalable, and its
completely decentralized control makes it more robust in the face of failures.
2.5.4.3 File system Model
Condor does not assume that file systems available on a process' home
machine are also available on the target machine when a process migrates. Instead,
it forwards all file system requests back to the home machine, which fulfills the
request and forwards the results back to the migration target. In contrast, Sprite has a
special cluster-wide network file system; it can assume that the same file system is
available on every migration target. Sprite forwards the state of open files to the target
machines and file system requests are carried out locally. Similar to Sprite, MOSIX
assumes that the same file system will be globally available, but MOSIX uses standard
NFS.
2.5.4.4 Fully Transparent Execution Location
MOSIX and Sprite support what might be called ``full transparency'': in these
systems, the process still appears to be running on the home node regardless of its actual
execution location. The process itself always thinks that it's running on its home node,
even if it migrated and is actually running on some other node. This has several important
side effects. For example, IPC channels such TCP/IP connections, named pipes, and the
like, are maintained in MOSIX and Sprite despite migration of processes on either end of
the IPC channel. Data is received at the communications endpoint--i.e., a process' home

26
node--where it is then forwarded to the node on which the process is actually running. In
contrast, Condor does not support such a strong transparency model; a Condor
process that migrates appears to be running on the migration target. For this
reason, migration of processes that are involved in IPC is not allowed.
2.5.4.5 Migration Policies
As mentioned earlier, MOSIX attempts to dynamically balance the load
continuously throughout the lifetime of all running processes, in an attempt to maximize
the overall CPU utilization of the cluster. Sprite schedules a process to an idle processor
once, when the process is born, and migrates that process back to its home node if the
foreign node's owner returns. Once an eviction has occurred, Sprite does not re-migrate
the evicted process to another idle processor. Condor falls somewhere in between these
two. Like Sprite, Condor assigns a process to an idle node when the jobs is created.
However, unlike Sprite, Condor attempts to find another idle node for the process every
time it gets evicted. Absent of evictions, Condor does not attempt to dynamically re-
balance the load as MOSIX does.
2.5.4.6 Check pointing Capability
The mechanics of Condor 's process migration implementation are such that
the complete state of the process is wr itten to disk when a migration occurs. After
the process state is wr itten to disk, the process is terminated, the state transferred to
a new machine, and the process reconstructed. This implementation has a useful
side effects. For example, the process state file can be saved. Saving it has the effect
of ``check pointing' ' the process, so that it can be restar ted from a previous point in
case of a hardware failure or other abnormal termination. The frozen process can
also be queued; who is to say that the frozen process has to be restar ted
immediately? The state file, with its process in stasis, can be kept indefinitely--
perhaps waiting for another idle processor to become available before restar ting.
The MOSIX and Sprite implementations are generally memory-to-memory and preclude
these interesting possibilities.
Table: Comparison of process migration schemes MOSIX CONDOR SPRITE
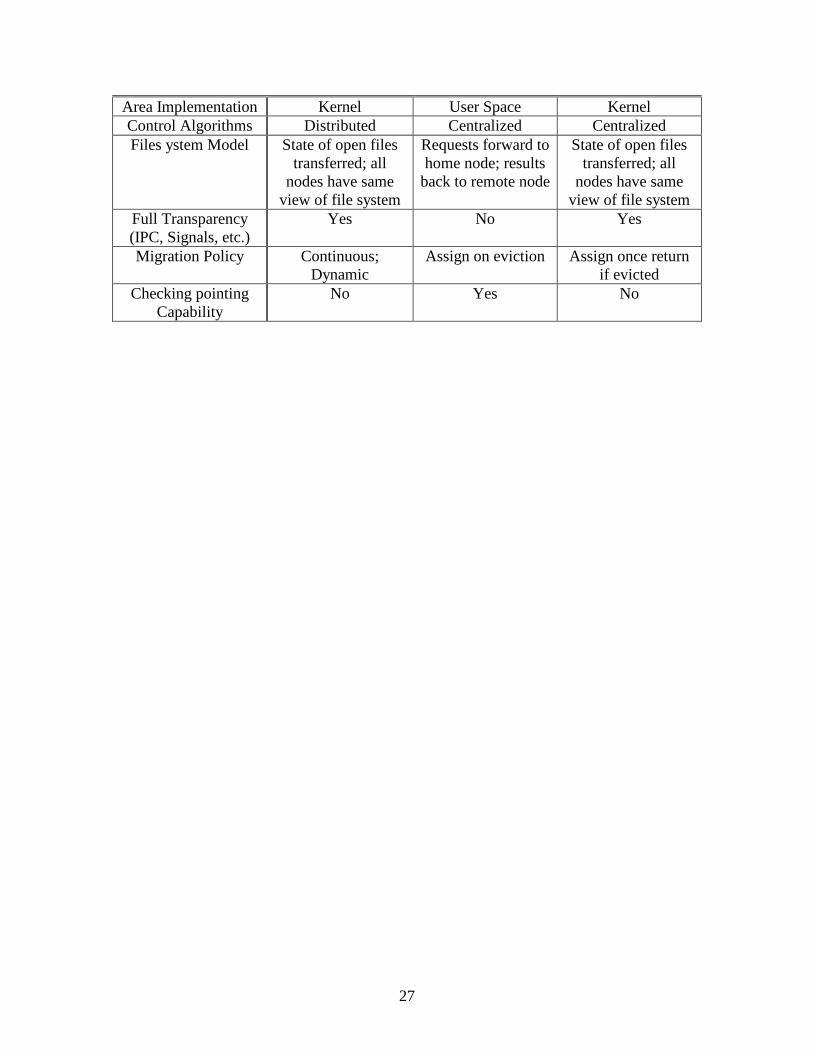
27
Area Implementation Kernel User Space Kernel Control Algorithms Distributed Centralized Centralized Files ystem Model State of open files
transferred; all nodes have same
view of file system
Requests forward to home node; results
back to remote node
State of open files transferred; all
nodes have same view of file system
Full Transparency (IPC, Signals, etc.)
Yes No Yes
Migration Policy Continuous; Dynamic
Assign on eviction Assign once return if evicted
Checking pointing Capability
No Yes No

28
�
3 Virtual File Systems
The distributed file system allows Beowulf to access inter-node file system. It
makes users look like they are accessing the local file system. Basically it is capable of
network transparency, location transparency and location independence. Beowulf
clusters almost always use the Network File System (NFS) protocol to provide distributed
file system services. However, NFS has a problem with scalability unlike the Andrew
File System (AFS). The AFS is proved to be able to reduce CPU usage and network
traffic. Also it overcomes the scaling problems. Recently AFS is available for Linux and
has emerged in the Beowulf community. An alternative for the distributed file system is
a virtual file system (VFS). One implemented open source version of VFS that operates
on the Beowulf is the PVFS. It can be installed without any modifications to the
hardware or kernel. The term virtual in the PVFS implies that file data is actually stored
on multiple file systems on local disks, not by PVFS itself. The term parallel means that
data is stored on multiple independent PCs, or cluster nodes, and that multiple clients can
access this data simultaneously and transparently. PVFS maintains a consistent file name
space across the machine [24].
In the user’s view, the UNIX file commands such as ls, cp and rm can be used on
PVFS files and directories. Also the PVFS supports the UNIX I/O interface and allows
existing UNIX I/O programs to use PVFS files without recompiling. Since PVFS spreads
data out across multiple cluster nodes, called I/O nodes, user can access data from various
paths. This is to reduce bottleneck in case of one access path. Moreover, to reduce the
kernel overhead, the PVFS clients directly contact PVFS servers rather than passing
through the local kernel. Besides, the PVFS library can be utilized by applications or by
libraries, such as the ROMIO MPI-IO library, for high speed PVFS access.

29
PVFS System
The figure above shows the PVFS system on the cluster. There are three types of
nodes, the management node, the compute node and the I/O node.
The computer nodes are the nodes of the clients that access the PVFS files. Every
node can be compute node depending on the configuration. The native API (libpvfs) in
the compute node provides user-space access to the PVFS servers. This library handles
the user-transparent scatter/gather operations necessary to move data between user
buffers and PVFS servers.
There is only one management node in the PVFS. The management node serve as a
metadata server. It has a daemon program named “mgr” running inside to manage the
metadata of PVFS e.g., filename permissions, owners and its location in the directory.
The client in the compute node will communicate through the library with the metadata
server in the management node.
The I/O node serves as an I/O server. It has a daemon program name “ iod” running
inside to store and retrieve file data on its local disks. The client in the compute node
will contact I/O servers in I/O nodes directly.
There are three interfaces through which PVFS may be accessed:
• PVFS native API. Not only the PVFS provides the UNIX-like interface, it also allows
users to rearrange how files will be striped across the I/O nodes.
• Linux kernel interface. This allows applications to access PVFS file systems through the
normal channels.

30
• ROMIO MPI-IO interface. This ROMIO implements the MPI2 I/O calls in a portable
library. It allows parallel programmers using MPI to access PVFS files through the
MPI-IO interface. [ht t p: / / www. mcs. anl . gov/ r omi o]
It is possible to share a globalize information between the processes or agents via
PVFS. The PVFS libraries can be used either directly via the native PVFS calls or
indirectly through the ROMIO MPI-IO interface or the MDBI interface.
31
4 Design Strong Mobility Environment
4.1 Mobility
The primary identifying characteristic of mobile agents is their ability to
autonomously migrate from host to host. Thus, support for agent mobility is a
fundamental requirement of the agent infrastructure. An agent which has “know-how”
but lack of resources can request its host server to transport it to some remote destination
equipped with resources. The agent server must then deactivate the agent, capture its
state, and transmit it to the server at the remote host. The destination server must restore
the agent state and reactivate it, thus completing the migration. The state of an agent
includes all its data, as well as the execution state of its thread.
At the lowest level, this is represented by its execution context and call-stack. If this
can be captured and transmitted along with the agent, the destination server can reactivate
the thread at precisely the point where it requested the migration. This can be useful for
transparent load-balancing, or fault-tolerant programs. An alternative is to capture
execution state at a higher level, in terms of application-defined agent data. The agent
code can then direct the control flow appropriately when the state is restored at the
destination. However, this only captures execution state at a coarse granularity (e.g.
function-level), in contrast to the instruction-level state provided by the thread context.
Agent systems execute agents using commonly available system or language
environments, which do not usually provide thread-level state capture. Since mobile
agents are autonomous, migration only occurs under explicit programmer control, and
thus state capture at arbitrary points is usually unnecessary.
There are two models for supporting agent mobility, in the weak mobility model, on
migration, the agent’s state essentially consists of the agent's program-defined data
structures or set of reference to resources that can be shared among multiple agents called
data state. Since there is no transferring of execution state, the execution has to start from
the beginning on the destination host. If the fragment of code is transferred, it must be
linked in the context of already running code in the destination host. Whereas the strong

32
mobility model captures the agent's state at the level of the underlying thread or process,
which consists of both data state and execute state. The execution can be resumed from
the point it stopped on the previous host. �
With weak mobility, an agent's migration is possible only at specific points in the
agent's code, and typically a migration is explicitly requested in the agent's code. It is
generally felt that program-controlled migration under weak mobility suffices for
majority of the applications.
In agent migration, to keep the design simple and efficient, most agent
programming systems do not support resumption of sessions, dealing with open files or
communication channels, on migration. This avoids dependencies on remote nodes.
Besides, under program-controlled mobility, one can properly close any open sessions
before migration, and reopen them after migration. If an agent is multithreaded, then
under the weak mobility model, the programmer needs to take special care when making
explicit requests for migration in the agent's code. Problems can arise if one thread
requests migration when other threads have not yet completed their tasks. In addition, one
needs to prevent a situation when two threads issue migration requests to move to
different hosts. Therefore, even when an agent programming system does not explicitly
support a multithreaded model for its agents, the programmer must be cognizant of such
implicitly created threads. Therefore, when requesting migration, it is the programmer's
responsibility to ensure that all other threads have either terminated or reached a state
when it is safe to terminate them and migrate the agent.
The strong mobility model allows an agent to be migrated at any point in its
execution. This model is certainly useful if agents need to be moved at unpredictable
points in time for fault-tolerance or load-balancing.
Another issue in agent mobility is the transfer of agent code. One possibility is for
the agent to carry all its code as it migrates. This allows the agent to run on any server
which can execute the code. Another possibility is not to transfer any code at all, but it
requires that the agent's code must be pre-installed on the destination server. In a third
approach, the agent does not carry any code but contains a reference to its code base -- a
server that provides its code upon request. During the agent's execution, if it needs to use

33
some code that is not already installed on its current server, the server can contact the
code base and download the required code. This is referred to as code-on-demand (COD).
4.1.1 Weak Mobility
As mentioned before, the weak mobility makes only data state (i.e., the values of
the internal variables) and code move, while the strong one allows the entire execution
state (i.e., the stack and program counter) of a mobile agent, code, and data state to move .
In fact, mobility requires the implementation of mechanisms to support execution
stopping, state collection, data transfer and execution resuming; all these kinds of
facilities must be provided by the runtime system support. The term mobility is used to
indicate a change of location performed by the entities of a system. It also needs to know
the capability of roaming among nodes in a network-aware fashion to find the needed
resources and services. Starting from simple data, the mobility has had an evolution that
has led to move the execution control, the code and the execution environment.
In weak mobility, after the movement, the agent is restarted and the values of its
variables are restored, but its execution restarts from the beginning or from a given
procedure (a method in case of objects). Usually, A new thread (or process) is created to
execute the code. The newly created thread performs all the needed information to deliver
the results to the source site. In addition, weak mobility has to explicitly synchronize in
order to generate deadlocks and inconsistence state. In addition, the function of mobility
need to encapsulate all the state involving a distributed computation, and can be easily
traced, checkpointed, and possibly recovered locally, without any need for knowledge of
global state. This function also is required in the strong mobility.
The UNIX r shd daemon is one example of weak mobility in that it allows the
shell script to be run on a remote host.
4.1.2 Strong Mobility
In strong mobility, not only code and data state are moved, but also the execution
state, in order to restart the execution exactly from the point where it was stopped before
movement. In strong mobility, the mobility of a complex entity occurs with the following
steps.

34
1. The execution flow is stopped.
2. The state of the migrating entity is collected.
3. The code and state of the migrating entity are shipped to the destination
node.
4. The code and the state of the migrating entity are restored
5. The execution is restarted.
In strong mobility, not only code and data state are moved, but also the execution
state, in order to restart the execution exactly from the point where it was stopped before
movement. In strong mobility, the mobility of a complex entity occurs with the following
steps. The execution state of a migrating agent is suspended, and its stack and program
counter are sent to the destination site, together with the relevant data. At the destination
site, the stack of the agent is reconstructed and the program counter is set appropriately.
Strong mobility uses state saving techniques to provide transparent process
migration or persistence functionalities. Furthermore, strong mobility has the ability to
store and retrieve computations as variables (continuations) and passes these to the other
agents (remote continuations). To support these things, transparent location function is
required. Strong mobility also usually communicates in an asynchronous fashion which
one agent sends messages to other agents and do not wait for the answers. As a fault
tolerance, whenever one of the communication partners of a given agent dies, the agent
will not stop working correctly even if it is waiting for some action of dead partner.
The existing languages that support strong mobility are Telescript, Tycoon, Agent
TCL and Emerald. In Agent TCL, an executing TCL script can move from one host to
another with single jump instruction. A jump freezes the program execution context and
transmits it to a different host which resumes the script execution from the instruction
that follow the jump.
One of application areas used in strong mobility is load balancing. Load balancing
requires that a running application be restored exactly as it was before the movement of
agents because it must be transparent to the application itself. This seems to require a
strong mobility mechanism, which grants that also the execution state is transferred and
resumed at the destination node.

35
Features Strong Mobility Software Tools
Code Required BPROC / CONDOR
Data State Required BPROC / CONDOR
Execution State Required CONDOR
Transparent migration Required CONDOR
(Limited Support)
Agent Migration
(e.g., Itinerary schedule policy
(Sequence / Selection / Split /
Split-Join) )
Implicit BPROC / CONDOR
(Limited Support)
Inter-Agent Communication
and Synchronization Required MPI
Collective Agent
Communication Optional MPI
Agent Monitor and Control Optional CONDOR
(Limited Support)
Agent Fault Recovery Required CONDOR
(Limited Support)
Agent Identification Required BPROC
(Limited Support)
Security Required NONE
4.2 Analysis of Existing Softwares
In this section, we will describe the way to apply the existing softwares to the
strong mobility presented in section 4.1. The existing softwares are Bproc, MPI,
CONDOR, and PVFS that can run in the Beowulf system environment.

36
4.2.1 MPI
The goal of MPI is to write our own parallel programs using the powerful and
general message-passing model of parallel computation. Therefore, MPI can be only used
on the clustering systems not general heterogenous systems connected to Internet. There
are several implementation version of MPI such as MPICH and LAM
(http://www.cs.nd.edu/lam).
In parallel programs, there are two important questions. First, how many processes
are participating in this computation? Second, Which one am I? MPI provides functions
to answer these questions by providing the follows: �
MPI_Comm_size - reports the number of processes. �
MPI_Comm_rank - reports the rank, a number of between 0 and size –1, identifying
the calling process.
The MPI-1 standard doest not specify how to run an MPI program. In genereal,
starting an MPI program is dependent on the implementation of MPI we are using, and
might require various scripts, program arguments, and/or environment variables. mpiexec
<args> is part of MPI-2, as a recommendation, but not a requirement. However, we can
write my MPI implementor.
There is no mechanism for loading code onto processors, or assigning processes to
processors or creating/destroying processes in MPI. Besides, the MPI does not provide
remote memory transfers, multithreading and virtual shared memory but it is designed to
be thread-safe.
In MPI, a process is defined in a group and a rank (a unique integer for labeling
each process in the group). Process groups can be created and destroyed. A message
label is specified by a context and a corresponding tag. In a point-to-point
communication, it is a communication between pairs of processes. The Message
selectivity is by rank and tag. In Collective communication, it involves all processes in
the scope of the communication specified by the communicator. The collective
communication routines do not take message tag arguments.

37
The feature of MPI includes six basic functions and 125 extension functions. The
point-to-point communication functions are �
MPI_SEND �
MPI_RECV
The collective communication functions are
��MPI_Bcast – sends data from one process to all others.
��MPI_Reduce - combines data from all processes and returning the result to a single
process.
4.2.1.1 Strong Mobility Features
As described above, MPI is good solution for data transportation across
heterogeneous systems. Therefore, MPI successfully satisfies Inter-Agent
Communication and Collective Agent Communication in strong mobility features. On the
other hand, we can use socket API based on TCP/IP as alternatives of MPI. The socket
API is also another good candidate for agent communication method. However, the
performance of socket API is much slower than that of MPI.
Strong Mobility
Features Requirement MPI Socket API
Support
Support
Inter-Agent
Communication and
Synchronization
Strongly
Required Functions:
(MPI_SEND(),
MPI_RECV())
Functions:
(sendto()/recvfrom(),
send()/recv())
Support Support
Collective Agent
Communication Optional Functions:
(MPI_REDUCE(),
MPI_BCAST())
Functions:
(send()/recv() using
multicast or
broadcast address.

38
Limitation
Applied only
clustering systems
within small local
networks
Applied all gobal
networks based on
TCP/IP protocol but
performance is much
slower
System Platform Supported on
Beowulf
Supported on the
systems with TCP/IP
4.2.2 BPROC
BPROC introduces a distributed process ID (PID) space. This allows a node to run
processes which appear in its process tree even though the processes are physically
present on other nodes. The remote processes also appear to be part of the PID space of
the front end node and not the node which they are running on. The node which is
distributing its pid space is called the master and other nodes running processes for the
master are the slaves. Each PID space has exactly one master and zero or more slaves.
Each PID space corresponds to a real PID space on some machine. Therefore, each
machine can be the master of only one PID space. A single machine can be a slave in
more than one PID space.
4.2.2.1 PID Masquerading
The PID masquerading modifications make it possible for a process to appear as
though a process exists in a different PID space. Processes are still part of the single PID
space that we're used to, but the PID related syscalls (getpid, getppid, kill, fork, wait)
have been modified to treat their arguments differently and to give different responses for
processes that have been tagged as masqueraded. PID masquerading also introduces a
user space daemon to control some of the PID related operations normally done by the
kernel. Each daemon will define a new "PID space" and can create new processes in that
space. Operations such as new PID allocation are handled by this daemon. (In the case of
a masqueraded process forking a new masqueraded PID will be needed for the child
process. This request gets sent out to the user space daemon which will forward it to the

39
master node. The ghost process there will fork and return the child PID it gets back to the
slave on the node. The child's new masqueraded PID is set to that PID.)
The PID related syscalls will only operate on other masqueraded processes that are
in the same PID space (that is they're under control of the same daemon.) Other non-
masqueraded processes on the local system become effectively invisible as a result.
Signals (kill(2)) that cannot be delivered locally are bounced out to the user space
daemon for delivery.
This is used in conjunction with ghosts to make it appear as though a piece of the
master node's PID space has been moved onto the slave node. When creating remote
processes, there are really 2 processes created, a ghost on the master to represent the
remote process and the real process on the slave node. The (masqueraded) process on the
slave gets the same PID as the ghost on the master node. The daemon controlling the
masqueraded process space in forwards requests from the real process back to the master
node. This way any operations the real process performs (fork, kill, wait, etc) will
performed in the context of the master node's process space. Most requests will be
satisfied by the ghost thread.
4.2.2.2 Starting processes
There are two basic ways to start a process in this scheme. The simpler one is the
rexec (remote execute) which takes the same arguments as execve plus a node number.
This inteface also has roughly the same semantics as the execve system call. This doesn't
involve transfering much data, but it does require that all binaries and any libraries they
require be installed on remote nodes.
The other interface which bproc provides is a "move" or "rfork" interface. This
works by saving a process' memory region and recreating it on the remote node. This has
the advantage that it can transport the binary and anything mmap'ed (such as the
dynmaically linked libraries) to the remote node. This could allow a great reduction in the
size of the software required to be installed on a node.

40
4.2.2.3 C Interface Library
Programs using bproc should include the bproc header file sys/bproc.h and be
linked with -lbproc. This package builds both static and dynamic versions of libbproc.
4.2.2.3.1 System Information
� void bproc_init(void) : This initializes the bproc library. It reads the current machine
state from /var/run/bproc. (This machine state is only available on the master node.)
It also reads an initial node mapping from $HOME/.bprocnodes if it exists.
� int bproc_numnodes(void) : Returns the number of nodes in the system. This is the
number of slave nodes (not including the front end). The nodes are numbered 0
though n-1.
� int bproc_nodeup(int node) : Returns true if node is up. �
int bproc_nodeaddr(int node, struct sockaddr *s, int size) : Saves the IP address of
node in the structure pointed to by s. Note that bproc_init has to be called on the
master node in order for this information to be available.
4.2.2.3.2 Node mapping
The library allows the user to create a node mapping that sits on top of the real node
numbers. This allows the user to always see the nodes he is using as nodes 0 through n-1
regardless of the physical nodes in use. Mappings are presented as an array of integers.
The number in element zero is the real node number node zero will map on to and so on.
bproc_init() reads an initial node mapping.
��int bproc_set_node_map(int *map, int numnodes) : This sets the node mapping
being used by libbproc. map is a pointer to an array which lists the real node
numbers that node numbers 0 through numnodes should map onto. �
void bproc_clear_node_map(void) : This clears any node mapping that might be
present. After this call, all node numbers will be treated as physical node numbers.
4.2.2.3.3 Creating processes on remote nodes
Bproc provides a number of mechanisms for creating processes on remote nodes. It
is probably better to think of these mechanisms as moving processes from the front end to

41
the remote node. The rexec mechanism is like doing a move then exec with lower
overhead. The rfork mechanism is implemented as an ordinary fork on the front end and
then a move to the remote node before the system call returns. Execmove does an exec
and then move before the exec returns to the new process.
Movement to another machine on the system is voluntary and is not transparent.
Once a process has been moved all its open files are lost except for STDOUT and
STDERR. These two are replaced with a single socket. (Their output is combined.) There
is an IO daemon what will forward between the other end of that connection and
whatever the original STDOUT was connected to. No pseudo tty operations are done.
The move is completely visible to the process after it has moved except for process
ID space operations. Process ID space operations include fork(),wait,kill, etc. All file
operations will operate on files local to the node that the process has been moved to.
Memory that was shared on the front end will no longer be shared.
Processes currently cannot move twice. The process movement API is only
provided on the master node.
Bug: Any child processes that a process had before moving will no longer be visible
to it after moving. SIGCHLD's will be delivered when they exit but it will be impossible
to pick up their exits status with wait(). �
int bproc_rexec(int node, char *cmd, char **argv, char **envp) : This call is like
execve in that it replaces the current process with a new one. The new process is
created on node and the local process becomes the ghost representing it. All
arguments are interpreted on the remote machine. The binary and all libraries it
needs must be present on the remote machine. This function returns -1 on failure
and does not return on success.
� int bproc_move(int node, int flags) : This call will move the current process to the
remote node number given by node. The flags argument determines the details of
the memory space move. See the VMADump for details on the flags argument.
Returns 0 on success, -1 on failure.
� int bproc_rfork(int node, int flags) : The semantics of this function are designed to
minic fork() except that the child process created will end up on the node given by
the node argument. What happens behind the scenes is the process forks a child and

42
that child performs a bproc_move() to move itself to the remote node. By combining
these two operations in a system call, we can prevent zombies and SIGCHLD's in
the case that the fork is successful but the move is not. On success, this function
returns the process ID of the new child process, on failure it returns -1.
� int bproc_execmove(int node, char *cmd, char * *argv, char **envp) : This function
allows migration of ordinary binaries by allowing you to exec a new process and
move the new process before it "wakes up". Returns -1 on failure, does not return on
success.
4.2.2.3.4 VMADump: Dumping and restoring processes
VMADump is a kernel module distributed with bproc which will dump a process's
state to or from a file descriptor. VMADump is short for Virtual Memory Area Dumper.
It will read or write to pipes, sockets, etc. as well as ordinary files. These functions are
used internally by bproc to move processes around. The saved state includes:
� All the processes memory regions. The date for all writable regions is saved. Read-
only regions that are mmap'ed from files (i.e. glibc code) can be stored as file
references to reduce the size of dumps.
� Other information about memory mmap'ed regions like where the bss and stacks
here. This allows stacks to grow and setbrk (malloc) to work after restoring the
memory space.
� The process's registers including FPU state. �
The process's signal handlers.
The following interface is provided for vmadump in libbproc: �
int bproc_vmadump(int fd, int flags) : This takes the current process and dumps it to
the file fd. It returns the number of bytes written to fd. When the process is
undumped, this function will return 0. The flags argument determines what memory
regions will have their data dumped and which ones will be stored as file references.
Writable memory regions are never stored as file references.
VMAD_DUMP_LIBS : If given, read only mmaps from files in /lib and /usr/lib
will not be stored as file references.

43
VMAD_DUMP_EXEC : If given, read only mmaps from the executable file will
not be stored as file references.
VMAD_DUMP_OTHER : If given, other read only mmaps not falling into the
categories above will not be stored as file references.
VMAD_DUMP_ALL : If given, no read only mmaps will be stored as file
references. This is the safest option if in doubt. This is the logical OR of the other flags. �
int bproc_vmaundump(int fd) : This attempts to undump an image from fd. This
function is not very error tolerant. If something goes wrong half way through
undumping, it will return with a half-undumped process. If successful, the current
process is replaced with the image from the dump. (much like exec)
4.2.2.3.5 C Library Reference
The following shows the C library reference for Bproc.
bproc_access — determine whether a node can be accessed �
bproc_chgrp — change node ownership
bproc_chmod — change the permissions on a node
bproc_chown — change node ownership
bproc_currnode — return the node the calling process is running on
bproc_execmove — move a newly execed process to another node
bproc_masteraddr — return the address of the master node
bproc_move — move the calling process to another node
bproc_nodeaddr — return the address of a node
bproc_nodecachepurgefail — flush file cache failure list
bproc_nodecachepurgeok — flush successful downloads from file cache
bproc_nodechroot — ask a slave daemon to perform a chroot
bproc_nodehalt — ask a slave daemon to halt the machine
bproc_nodeinfo — get status information for single node
bproc_nodelist — get status information for single node
bproc_nodenumber — get the node number corresponding to an address
bproc_nodepwroff — ask a slave daemon to power off the machine
bproc_nodereboot — ask a slave daemon to reboot the machine

44
bproc_nodesetstatus — set status of a node
bproc_nodestatus — get the status of a move the calling process to another node
bproc_notifier — get BProc notifier file descriptor
bproc_numnodes — get the number of nodes in the system
bproc_pidnode — return the node that a process exists on
bproc_proclist — get status information for single node
bproc_requestfile — get status information for single node
bproc_rfork — fork a child onto remote node
bproc_version — get BProc version information
4.2.2.4 Strong Mobility Features
As described above, BPROC is the solution for golobal process ID and limited
process scheduler and migration that move the process to the remote node at only one
time. Therefore, MPI successfully satisfies Agent Identification and Collective Agent
Communication in strong mobility features. On the other hand, we can use socket API
based on TCP/IP as alternatives of MPI. The socket API is also another good candidate
for agent communication method. However, the performance of socket API is much
slower than that of MPI.
Strong
Mobility
Features
Requirement BPROC
Support Agent
Identification Required
Functions: (bproc_proclist(), bproc_pidnode())
Limited Support Agent
Migration Implicit
Processes decide if, when and where they will migrate
Support
Code Required Functions: (bproc_rexec(),bproc_move(),bproc_rfork(),
bproc_execmove())

45
Support
Data State Required Functions: (bproc_rexec(),bproc_move(),bproc_rfork(),
bproc_execmove())
Limitation
- Limited Agent Location: Processes decide if, when and
where they will migrate
- System image is not preserved. (Limited Weak Mobility)
- Open files are lost.
System
Platform Supported on Beowulf
Others MPI and Bproc can work together
4.2.3 CONDOR
There are several limitations on CONDOR
4.2.3.1 Current Limitations
Although Condor can schedule and run any type of process, Condor does have
some limitations on jobs that it can transparently checkpoint and migrate: ��Multi-process jobs are not allowed. This includes system calls such as fork(), exec(),
and system().
� Interprocess communication is not allowed. This includes pipes, semaphores, and
shared memory.
� Network communication must be brief. A job may make network connections using
system calls such as socket(), but a network connection left open for long periods
will delay checkpointing and migration.
� Sending or receiving the SIGUSR2 or SIGTSTP signals is not allowed. Condor
reserves these signals for its own use. Sending or receiving all other signals is
allowed.

46
� Alarms, timers, and sleeping are not allowed. This includes system calls such as
alarm(), getitimer(), and sleep().
� Multiple kernel-level threads are not allowed. However, multiple user-level threads
are allowed.
� Memory mapped files are not allowed. This includes system calls such as mmap()
and munmap().
� File locks are allowed, but not retained between checkpoints. �
All files must be opened read-only or write-only. A file opened for both reading and
writing will cause trouble if a job must be rolled back to an old checkpoint image.
For compatibility reasons, a file opened for both reading and writing will result in a
warning but not an error. �
A fair amount of disk space must be available on the submitting machine for storing
a job's checkpoint images. A checkpoint image is approximately equal to the virtual
memory consumed by a job while it runs. If disk space is short, a special checkpoint
server can be designated for storing all the checkpoint images for a pool. �
On Digital Unix (OSF/1), HP-UX, and Linux, your job must be statically linked.
Dynamic linking is allowed on all other platforms. (Note: these limitations only
apply to jobs which Condor has been asked to transparently checkpoint. If job check
pointing is not desired, the limitations above do not apply.)
� Secur ity Implications: Condor does a significant amount of work to prevent
security hazards, but loopholes are known to exist. Condor can be instructed to run
user programs only as the UNIX user nobody, a user login which traditionally has
very restricted access. But even with access solely as user nobody, a sufficiently
malicious individual could do such things as fill up /tmp (which is world writable)
and/or gain read access to world readable files. Furthermore, where the security of
machines in the pool is a high concern, only machines where the UNIX user root on
that machine can be trusted should be admitted into the pool. Condor provides the
administrator with IP-based security mechanisms to enforce this.
� Jobs Need to be Re-linked to get Check pointing and Remote System Calls:
Although typically no source code changes are required, Condor requires that the
jobs be re-linked with the Condor libraries to take advantage of check pointing and

47
remote system calls. This often precludes commercial software binaries from taking
advantage of these services because commercial packages rarely make their object
code available. Condor's other services are still available for these commercial
packages.
4.2.3.2 Condor Daemons
The following list describes all the daemons and programs that could be started
under Condor and what they do:
� condor_master
This daemon is responsible for keeping all the rest of the Condor daemons running
on each machine in your pool. �
condor_startd
This daemon represents a given resource (namely, a machine capable of running
jobs) to the Condor pool. It advertises certain attributes about that resource that are used
to match it with pending resource requests. �
condor_starter
This program is the entity that actually spawns the remote Condor job on a given
machine. �
condor_schedd
This daemon represents resources requests to the Condor pool. Any machine that
you wish to allow users to submit jobs from needs to have a condor_schedd running..
� condor_shadow
This program runs on the machine where a given request was submitted and acts as
the resource manager for the request.
� condor_collector
This daemon is responsible for collecting all the information about the status of a
Condor pool.
� condor_negotiator
This daemon is responsible for all the match-making within the Condor system.
Periodically, the negotiator begins a negotiation cycle, where it queries the collector for
the current state of all the resources in the pool.

48
� condor_kbdd
This daemon is only needed on Digital Unix and IRIX. On these platforms, the
condor_startd cannot determine console (keyboard or mouse) activity directly from the
system.
� condor_ckpt_server
This is the checkpoint server. It services requests to store and retrieve checkpoint
files.
4.2.3.3 Submitting Different Types of Jobs: Alternative Universes
A Universe in condor defines an execution environment. Condor supports the
following Universes:
� Vanilla
� MPI: The MPI Universe allows parallel program written with MPI to be managed
by Condor
� PVM �
Globus �
Scheduler: DAGMan Scheduler �
Standard:
• Transparent process checkpoint and restart
• Transparent process migration
• Remote system calls
• Configurable file I/O buffering
• Toconvert our program into a standard universe job, we must use
condor_compile to relink it with the condor libraries.
- Example:
% cc main.o –o program
% condor_compile cc main.o –0 program

49
4.2.3.4 Strong Mobility Features
Strong Mobility Features Requirement CONDOR
Support Code / Data State /
Execution State Required
Commands: (condor_checkpoint, condor_submit)
Limited Support Transparent Migration Required
Commands: (condor_reschedule, condor_submit)
Limited Support Agent Migration Required
Commands: (condor_findhost)
Support Agent Fault Recovery Required
Commands: (condor_checkpoint, condor_reconfig)
Limited Support Agent Identification Required
Commands: (condor_q)
Limited Support Agent Monitor and Control Optional
Commands: (condor_q, condor_status)
Support Security Required
X.509 Certificates for Authentication
Limitation
- See Section 4.2.3.1 Current Limitations
- Multi-Universe Problem (e.g., need to check if
“MPI” and “check point” can work together
using different universe) – see Section Section
4.2.3.3
- No library interfaces for developer. Limitted
support with command.
System Platform Supported on Beowulf
Others Need to check the real performance of CONDOR

50
4.2.4 MAUI
Maui is not the right tool to emulate the strong mobility because it is a batch
scheduling in the user level via external commands. The MAUI itself is not a resource
manager but it makes decisions by querying and controlling a resource management
system such as PBS or Loadleveler.
4.2.5 PVFS
The PVFS is a good candidate tool to share the information or perform the file I/O
by multiple processes which can access this file simultaneously and transparently. Also
the PVFS maintains a consistent file name space across the cluster.
The PVFS libraries can be used either directly via the native PVFS calls or
indirectly through the ROMIO MPI-IO interface or the MDBI interface.
4.2.5.1 Direct access via PVFS function calls
All normal UNIX I/O like read( ) or write( ) will work fine with PVFS without any
changes. Files created this way will be striped according to the file system defaults set at
compile time. To determine the physical distribution when the file is first created, the
PVFS provides the function pvf s_open( ) with the parameters as shown below.
pvf s_open( char * pat hname, i nt f l ag, mode_t mode) ;
pvf s_open( char * pat hname, i nt f l ag, mode_t mode, st r uct
pvf s_f i l est at * di st ) ;
The pvfs_filestat structure is described below.
st r uct pvf s_f i l est at { i nt base; / * The f i r s t i od node t o be used * / i nt pcount ; / * The number of i od nodes f or t he f i l e * / i nt ss i ze; / * s t r i pe s i ze * / i nt sof f ; / * NOT USED * / i nt bsi ze; / * NOT USED * / }
To obtain information on the physical distribution of a file, use pvf s_i oct l ( ) on
an open file descriptor:
pvf s_i oct l ( i nt f d, GETMETA, st r uct pvf s_f i l est at * di st ) ;

51
Besides, the PVFS provides multi-dimensional block interface (MDBI) which is a
slightly higher-level view of file data than the native PVFS interface. With the MDBI,
file data is considered as an N dimensional array of records. This array is divided into
``blocks'' of records by specifying the dimensions of the array and the size of the blocks
in each dimension.
There are five basic calls used for accessing files with MDBI:
i nt open_bl k( char * pat h, i nt f l ags, i nt mode) ; i nt set _bl k( i nt f d, i nt D, i nt rs, i nt ne1, i nt nb1, . . . , i nt nen, i nt nbb) ; i nt r ead_bl k( i nt f d, char * buf , i nt index1, . . . , i nt indexn) ; i nt wr i t e_bl k( i nt f d, char * buf , i nt index1, . . . , i nt indexn) ; i nt c l ose_bl k( i nt f d) ;
4.2.5.2 Indirect access via ROMIO MPI-IO
The ROMIO MPI-IO interface implements the MPI-2 I/O calls in a portable library. It
allows parallel programmers using MPI to access PVFS files through the MPI-IO interface. The
MPI-IP functions provide basic functions performed on (parallel) Files including File opening,
File closing, File deleting, File resizing, File space-pre-allocating, File size/parameter querying
and File Info setting/getting. The example of functions and their parameter are shown below.
The full detail is available in the MPI-2 (I/O chapter).
• MPI_FILE_OPEN : open the file identified by the file name filename on all
processes in the comm communicator group.
MPI_FILE_OPEN(comm, filename, amode, info, fh)
IN comm communicator (handle)
IN filename name of file to open (string)
IN amode file access mode (integer)
IN info info object (handle)
OUT fh new file handle (handle)
• MPI_FILE_CLOSE : synchronizes file state then closes the file associated
with fh.
MPI_FILE_CLOSE(fh)
INOUT fh file handle (handle)

52
• MPI_FILE_DELETE : delete the file identified by the file name filename.
MPI_FILE_DELETE(filename, info)
IN filename name of file to delete (string)
IN info info object (handle)
The MPI-IO is able to implement in various styles e.g., Noncontiguous Accesses,
Collective I/O, Nonblocking I/O, Split Collective I/O and Shared File Pointers.

53
References
[1] Scyld Computing Corporation, “ Scyld Beowulf Clustering for High Performance” ,
white paper, available at http://www.scyld.com/products/wpaper.pdf
[2] Beowulf Software, available at http://www.beowulf.org/software/software.html
[3] MPICH (Argonne National Laboratory's implementation of MPI), available at
http://www-unix.mcs.anl.gov/mpi/mpich/index.html
[4] LAM/MPI (Local Area Multicomputer MPI), available at
http://www.mpi.nd.edu/lam/
[5] Liang Cheng, Ajay Wanchoo, and Ivan Marsic. Hybrid Cluster Computing with
Mobile Objects. Proceedings. The Fourth International Conference/Exhibition on
Volume: 2 , 2000 , Page(s): 909 -914 vol.2. Available at
http://www.caip.rutgers.edu/disciple/Publications/HPCAsia2000.pdf
[6] Holger Pals, Stefan Petri, and Claus Grewe. FANTOMAS Fault Tolerance for
Mobile Agents in Clusters. Available at
http://ipdps.eece.unm.edu/2000/ftpds/18001241.pdf
[7] Sherif A. Elfayoumy and James H. Graham An Agent-based Architecture for
Tuning Parallel and Distributed Applications Performance. 2nd International
Workshop on Cluster-Based Computing (WCBC'2000), Santa Fe, NM, May 2000.
Available at www.crhc.uiuc.edu/~steve/wcbc00/wcbc-00-elg.pdf
[8] Putchong Uthayopas, Sugree Phatanapherom, Thara Angskun, Somsak
Sriprayoonsakul. “SCE : A Fully Integrated Software Tool for Beowulf Cluster
System.” Proceedings of Linux Clusters: the HPC Revolution, National Center for
Supercomputing Applications (NCSA), University of Illinois, Urbana, IL, 2001
June 25-27. Available at http://prg.cpe.ku.ac.th/publications/sce_linuxhpc.pdf
[9] Yanyan Yang, Omer F. Rana, David W. Walker, Christ Georgousopoulos, Roy
Williams. “Mobile Agent on the SARA Digital Library.” Center for Advanced
Computing Research (CACR) Technical Reports in 2000 (CACR-186). Available at
http://www.cacr.caltech.edu/Publications/techpubs/
[10] Montri Sapapipatpong and Putchong Uthayopas. A Prototype Implementation of
Mobile Agent System on SMILE Beowulf Cluster. Proceeding of The 22nd

54
Electrical Engineering Conference (EECON-22), Bangkok, Thailand, Dec 1999.
Available at http://prg.cpe.ku.ac.th/publications/ and http://prg.cpe.ku.ac.th/~pu/.
[11] MAUI, available at http://www.supercluster.org/documentation/
[12] Thomas Sterling, Beowulf Cluster Computing with Linux, MIT Press, 2002.
MOSIX. Available at http://www.mosix.org
[13] J. Drake. Linux Clusters without the Pain. Available at
http://softwaredev.earthweb.com/sdopen/article/0,,12077_630211,00.html
[14] J. Vernooij. Using Mosix with LTSP. Available at
http://people.nl.linux.org/~jelmer/ltsp-mosix.html
[15] S. McClure and R. Wheeler. HOW LINUX CLUSTERS SOLVE REAL WORLD
PROBLEMS. Proceedings of FREENIX Track: 2000 USENIX Annual Technical
Conference. San Diego, CA, 2000. Available at
http://www.usenix.org/events/usenix2000/freenix/full_papers/mcclure/mcclure.pdf
[16] A. Barak and O. La’adan. The MOSIX Multicomputer Operating System for High
Performance Cluster Computing. Journal of Future Generation Computer Systems,
Vol. 13, No. 4-5, pp. 361-372, March 1998. Available at
http://citeseer.nj.nec.com/barak98mosix.html
[17] Sprite (University of California, Berkeley). Available at
http://www.cs.berkeley.edu/projects/sprite/sprite.papers.html
[18] F. Douglis and J.K. Outerhout. Process Migration in the Sprite Operating System.
In Proceedings of the 7th International Conference on Distributed Computing
Systems, pp. 18-25, September 1987.
[19] F. Douglis and J.K. Ousterhout. Transparent Process Migration: Design
Alternatives and the Sprite Implementation, Software-Practice & Experience,
21(8):757--785, August 1991. Available at
http://citeseer.nj.nec.com/douglis91transparent.html
[20] J.H. Hartman and J.K. Ousterhout. Performance Measurements of a multiprocessor
Sprite Kernel. Available at http://citeseer.nj.nec.com/hartman90performance.html
[21] K. Shirriff. An Implementation of Memory Sharing and File Mapping.
[22] K. Shirriff. Sprite papers. Available at
http://www.cs.berkeley.edu/projects/sprite/sprite.papers.html

55
[23] M.J.M. Ma, C.L. Wang and F.C.M. Lau. Delta Execution: A preemptive Java
thread migration mechanism. Available at
http://www.csis.hku.hk/~fcmlau/papers/cluster00.pdf
[24] http://parlweb.parl.clemson.edu/pvfs