Taming the Electromagnetic Solenoid: Building a System That Achieves a Soft Landing Gary Bergstrom...
38
Taming the Electromagnetic Solenoid: Building a System That Achieves a Soft Landing Gary Bergstrom Magnesense
-
Upload
diana-allison -
Category
Documents
-
view
216 -
download
1
Transcript of Taming the Electromagnetic Solenoid: Building a System That Achieves a Soft Landing Gary Bergstrom...

Taming the Electromagnetic Solenoid: Building a System That Achieves a Soft Landing
Gary Bergstrom
Magnesense

Gary Bergstrom, Magnesense
Simplified valve

Gary Bergstrom, Magnesense
Flux in an E-core

Gary Bergstrom, Magnesense
Electrical
• Rtotal=Rdrive+Rsolenoid
• L is inductance of solenoid
• Rsolenoid is a function of temperature
• Inductance is a strong function of position
+
-Drive
Solenoid
L
Rsolenoid
Rdrive

Gary Bergstrom, Magnesense
Inductance vs. Position
0
0.001
0.002
0.003
0.004
0.005
0.006
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008
meters
Hen
ries
Inductance

Gary Bergstrom, Magnesense
Mass, spring damper – mechanical model
x
m mass, Kgc damping coeffk spring coeff, N MF force, Nx displacement, Mx velocity, M/Sx acceleration, M/S^2
m is all moving mass, including part of springs
k is the net restoring force from all springsF is the net electromagnetic force from both stators
c is damping from mechanical friction and gas flow
x is displacement, symbolized by a pointer moving along scale
m x + c x + k x = Fk c
m
F

Gary Bergstrom, Magnesense
Force vs. Position, various flux densities
0
200
400
600
800
1000
1200
0.00000 0.00100 0.00200 0.00300 0.00400 0.00500 0.00600 0.00700 0.00800
gap in meters
forc
e in
N
0.1
0.3
0.5
0.7
0.9
1.1
1.3
1.5
1.7
1.9
1.9
1.7
1.5

Gary Bergstrom, Magnesense
Force vs. Flux density, various gaps
0
200
400
600
800
1000
1200
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Flux density in T
Fo
rce
in N 0.00000
0.00117
0.00218
0.00400
gap
0.00000
0.00117
0.00218
0.00400

Gary Bergstrom, Magnesense
Flux summary
• Flux resists changes
• V=L*dI/dt only when:– x doesn’t change– no eddy current– no saturation
• Flux is the integral of inductive voltage
• Force goes as the square of flux and is a non-linear function of position
Gary Bergstrom, Magnesense
Excel spreadsheet of simulation

Gary Bergstrom, Magnesense
Voltage drive
• I=V/Rtotal
• if V=40V and Rtotal=.25 then I=160 Amps
• This can occur at saturation
• Power lost is I^2 * Rtotal so we want to minimize R
42V
Solenoid

Gary Bergstrom, Magnesense
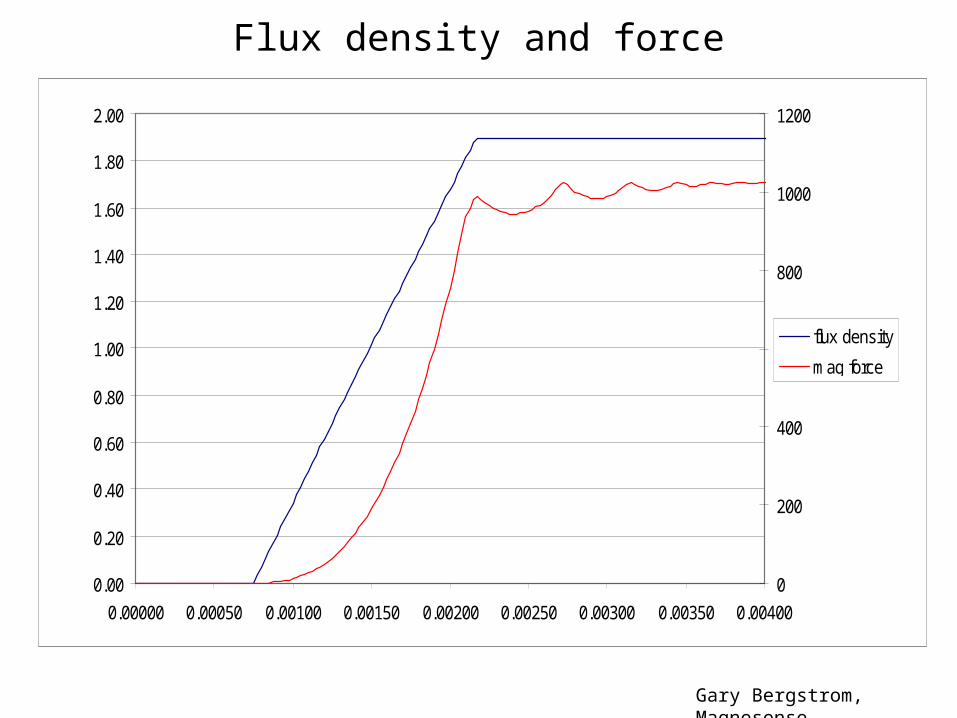
Position, voltage and current
80% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00100 0.00200 0.00300 0.00400
0
5
10
15
20
25
30
35
40
45
position - x
voltage
I
Gary Bergstrom, Magnesense
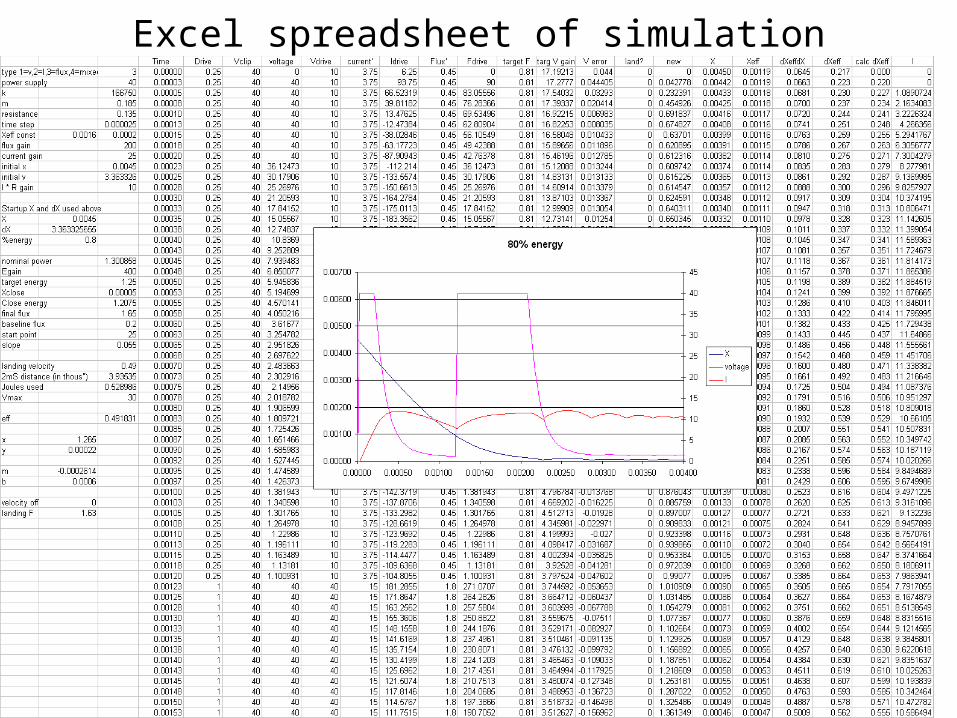
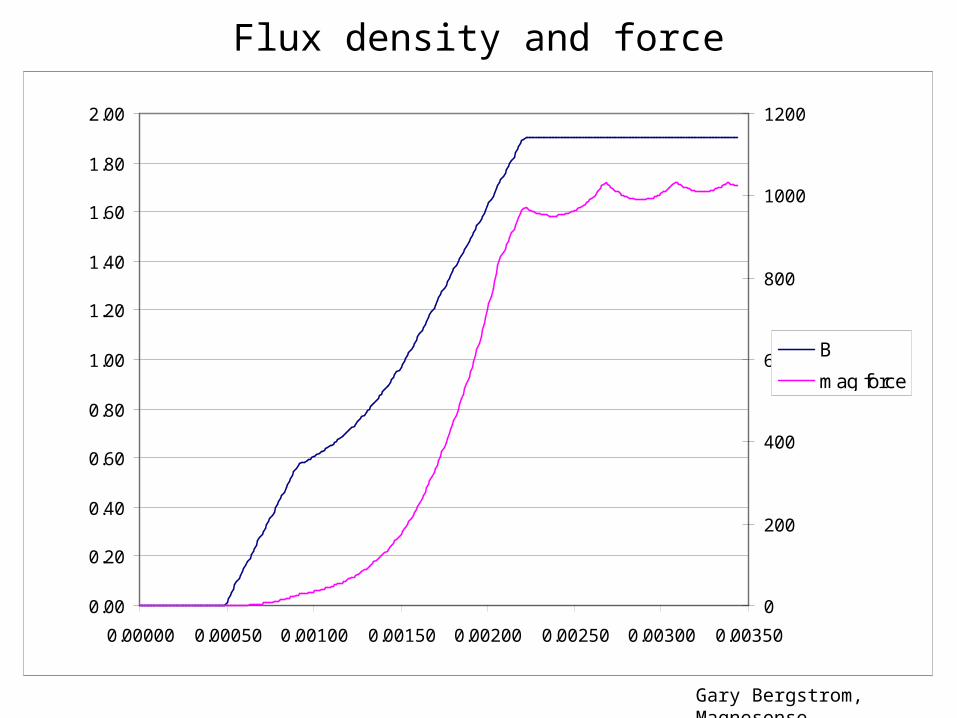
Flux density and force
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.00
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
200
400
600
800
1000
1200
flux density
mag force

Gary Bergstrom, Magnesense
Voltage drive details
• Time is in seconds
• Position 4.5 mm to 0 mm (plot starts near “middle”)
• Voltage 0 to 40 volts
• Flux density in Teslas
• Force is in Newtons
• Flux must = ~1.65 T to hold in this example
• “bounce” was set to 70% of the incoming velocity (or ½ the energy)
• Flux goes as integral of applied inductive voltage
• Force is function of position and square of flux
Gary Bergstrom, Magnesense
Position, voltage and current
80% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00100 0.00200 0.00300 0.00400
0
5
10
15
20
25
30
35
40
45
position - x
voltage
I

Gary Bergstrom, Magnesense
Flux density and force
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.00
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
200
400
600
800
1000
1200
flux density
mag force

Gary Bergstrom, Magnesense
Position, voltage and current
85% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000
0.00050
0.00100
0.00150
0.00200
0.00250
0.00300
0.00350
0.00400
0
5
10
15
20
25
30
35
40
45
position - x
voltage
I
Gary Bergstrom, Magnesense
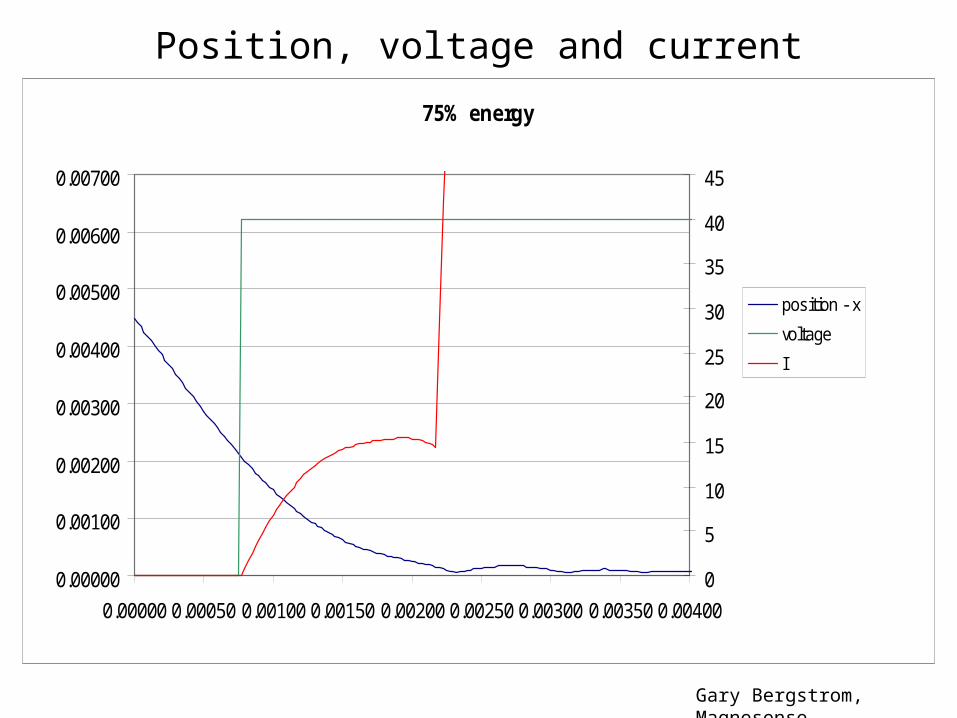
Position, voltage and current
75% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
position - x
voltage
I
Gary Bergstrom, Magnesense
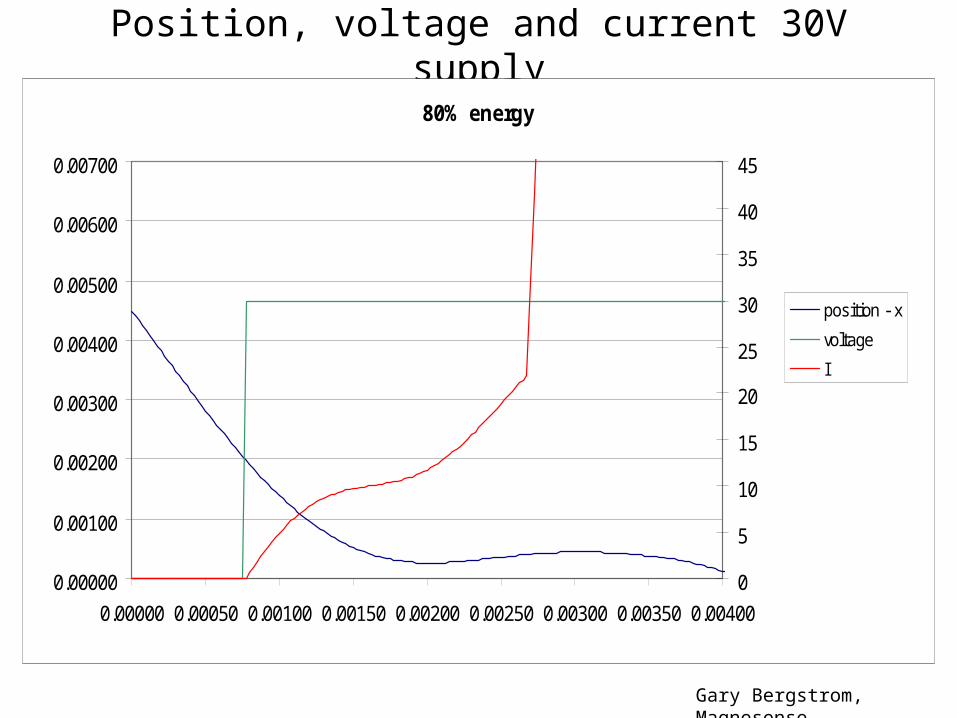
Position, voltage and current 30V supply
80% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
position - x
voltage
I

Gary Bergstrom, Magnesense
Voltage drive summary
• Sensitive to changes in power supply
• Very prone to saturating core, but need to run close to saturation due to size considerations
• No good correlation between applied voltage and resulting force
• Cannot always achieve soft landing and holding flux level at same time with simple drive
• Landing time very sensitive to changes in initial energy
Gary Bergstrom, Magnesense
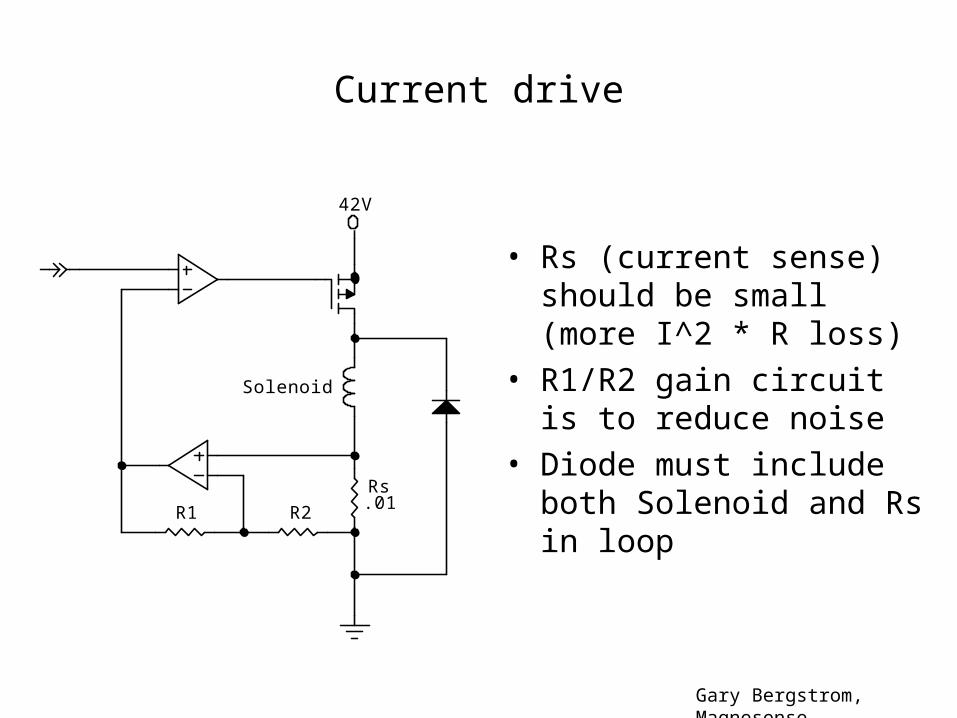
Current drive
• Rs (current sense) should be small (more I^2 * R loss)
• R1/R2 gain circuit is to reduce noise
• Diode must include both Solenoid and Rs in loop
R2R1
Solenoid
42V
Rs.01

Gary Bergstrom, Magnesense
Position, voltage and current
80% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I
Gary Bergstrom, Magnesense
Flux density and force
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.00
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350
0
200
400
600
800
1000
1200
B
mag force
Gary Bergstrom, Magnesense
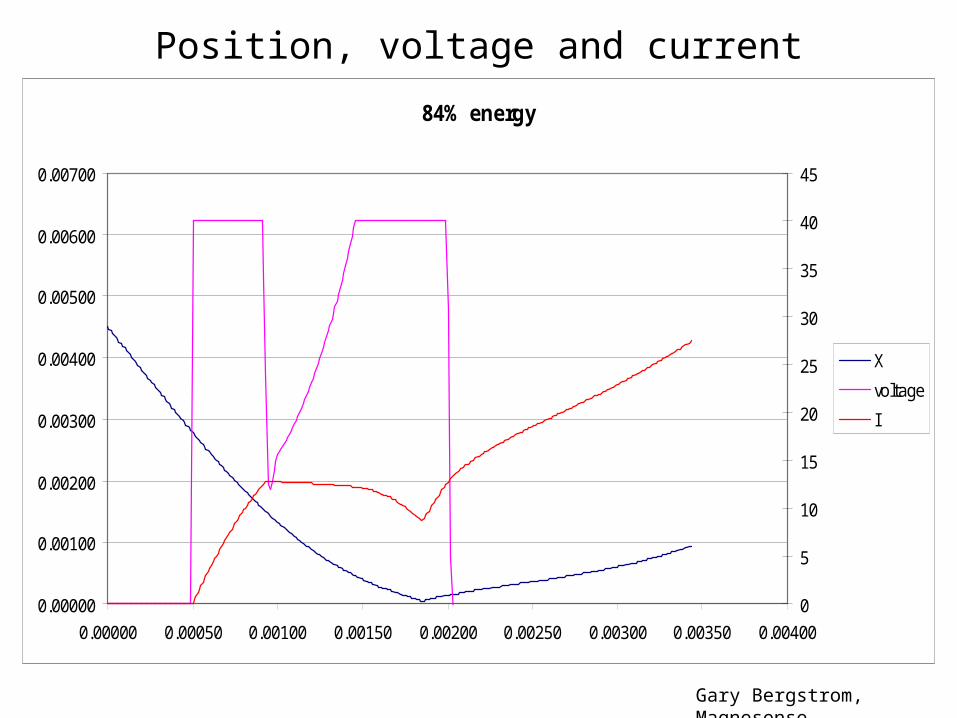
Position, voltage and current
84% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I

Gary Bergstrom, Magnesense
Position, voltage and current
76% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I

Gary Bergstrom, Magnesense
Position, voltage and current 30V supply
80% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I

Gary Bergstrom, Magnesense
Current drive summary
• Not very sensitive to power supply changes
• Saturation is not as big a problem (current is limited, saturation still occurs)
• Unstable – the current changes in the opposite direction from what is needed for a soft landing
• Back EMF forces the current around in counter-intuitive ways

Gary Bergstrom, Magnesense
Flux drive
• Flux sensor needed
• This design uses full bridge drive
• More parts, more performance
Driver
OutIn Flux
Sensor
Flux
Solenoid
42V

Gary Bergstrom, Magnesense
Position, voltage and current
80% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I

Gary Bergstrom, Magnesense
Flux density and force
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
1.10
1.20
1.30
1.40
1.50
1.60
1.70
1.80
1.90
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
100
200
300
400
500
600
700
800
900
1000
B
mag force

Gary Bergstrom, Magnesense
Position, voltage and current
85% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I

Gary Bergstrom, Magnesense
Position, voltage and current
75% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I

Gary Bergstrom, Magnesense
Position, voltage and current 30V supply
80% energy
0.00000
0.00100
0.00200
0.00300
0.00400
0.00500
0.00600
0.00700
0.00000 0.00050 0.00100 0.00150 0.00200 0.00250 0.00300 0.00350 0.00400
0
5
10
15
20
25
30
35
40
45
X
voltage
I

Gary Bergstrom, Magnesense
Flux drive summary
• Less sensitive than voltage drive to changes in power supply
• Stable like voltage drive but without the saturation problem
• Flux, therefore force is known (if position is known)
• Allows position to be calculated since:x ~ current / flux
• Position PID loop can now be closed giving us closed loop position drive, with a well behaved open loop system
Gary Bergstrom, Magnesense
So how do we sense flux?
• Hall effect sensor
• Sense coil
• “Sensorless”

Gary Bergstrom, Magnesense
Hall effect sensor
Good points:
• Simple
• DC response
• Low cost
• Small
Bad points:
• Temperature (reliability)
• Some cost
• Extra wires
• Measurement position
Flux
5VHall

Gary Bergstrom, Magnesense
Sense coil
Good points:
• Simple circuit
• Rugged
• Low cost
• No temperature problems
Bad points:
• More parts
• Higher cost
• Takes up core area
• Extra wires
Flux
INT

Gary Bergstrom, Magnesense
“Sensorless”
Good points:
• No wires
• Reliable
• No size (at valve)
• Can be done in software
Bad points:
• Small temperature sensitivity
• Even more parts
• Difficult to develop
• Difficult to understand
Fluxexistingdrive
Rtotal
MULT
Rsense
INT


















