

Tactile Display: Psychophysics, Materials, Design...
103
Tactile Display: Psychophysics, Materials, Design, Examples and Applications 2010.01.27 Ki-Uk Kyung [email protected] HCI 2010 Haptics Workshop
Transcript of Tactile Display: Psychophysics, Materials, Design...
Tactile Display:
Psychophysics, Materials, Design,
Examples and Applications
2010.01.27
Ki-Uk Kyung
HCI 2010 Haptics Workshop
2
Outline
Introduction to tactile display
Nature of Human tactile perception
Neural Aspect of tactile perception
Biomechanics
Design of tactile display
Capability
Mechanism & Materials
Examples of tactile displays
3
Concepts of “Tactile Display”?
Literature
The ideal tactile display implementation would
provide the user with a sensation indistinguishable
from direct contact. [M.A. Srinivasan]
Tactile displays attempts to realistically simulate
physical phenomena between skin and contact
surface that occur during interaction with real objects
by transmitting small-scale shape, vibration and
roughness information. [R. Howe, Haptic Community]
4
What is “Tactile Display”?
Tactile display is
physical mechanism or device that providing
tactile sense to a user
Tactile sense includes
sensation of distributed pressure, thermal
characteristics, skin vibration, skin stretch and
pain perceived through the skin.
5
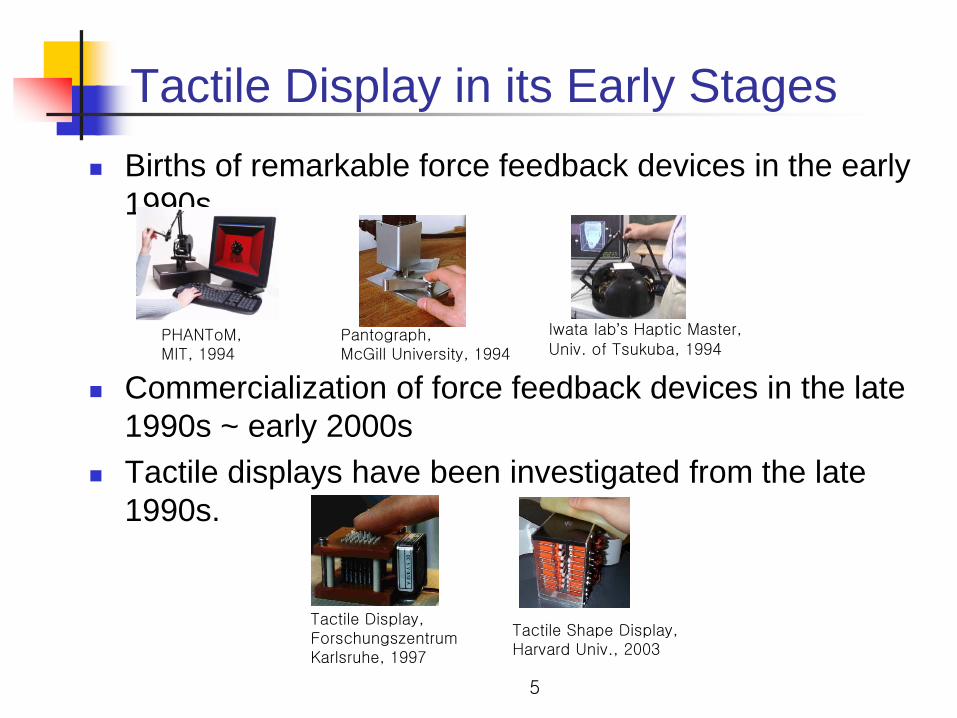
Tactile Display in its Early Stages
Births of remarkable force feedback devices in the early
1990s
Commercialization of force feedback devices in the late
1990s ~ early 2000s
Tactile displays have been investigated from the late
1990s.
PHANToM, MIT, 1994
Pantograph, McGill University, 1994
Iwata lab’s Haptic Master, Univ. of Tsukuba, 1994
Tactile Shape Display, Harvard Univ., 2003
Tactile Display, Forschungszentrum Karlsruhe, 1997

6
Tactile Display and Interdisciplinary
Studies

7
Outline
Introduction to tactile display
Nature of Human tactile perception
Neural Aspect of tactile perception
Biomechanics
Design of tactile display
Capability
Mechanism & Materials
Examples of tactile displays
Reading list

8
Sensory Processing Begins in
Receptor Cells
concept
of labeled
line
9
Tactile Sensing Receptors
Tactile Sensing is the result of a chain of events that starts with stimulus applied to the body
Mechanoreceptor respond to mechanical action
Thermoreceptor respond to a change in skin temperature
Nocioreceptor convey the sensation of pain (nociceptor)
10
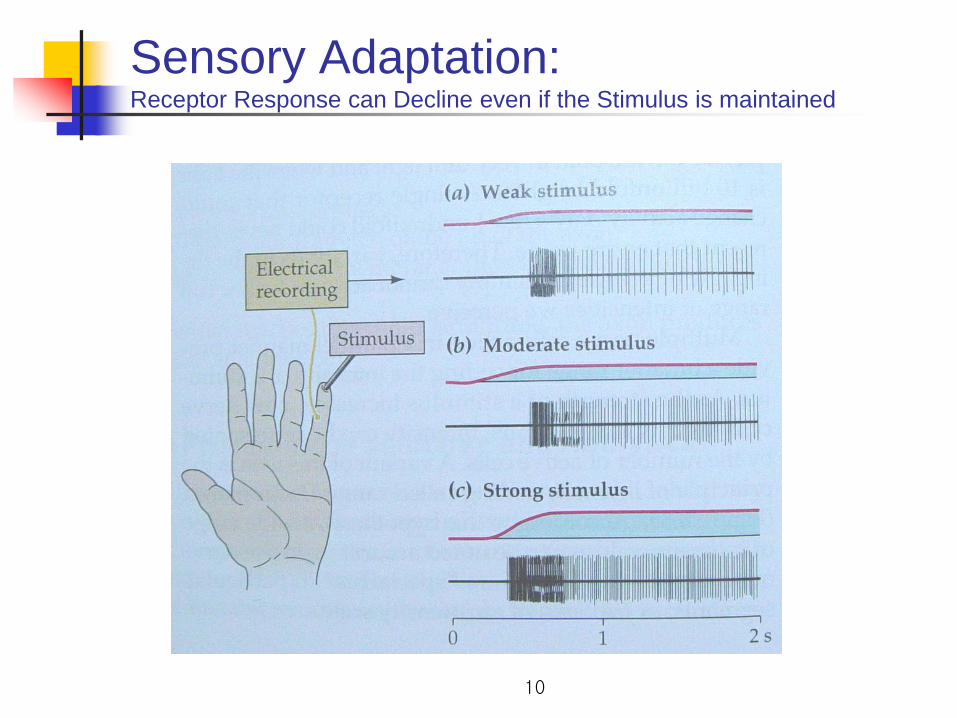
Sensory Adaptation: Receptor Response can Decline even if the Stimulus is maintained
11
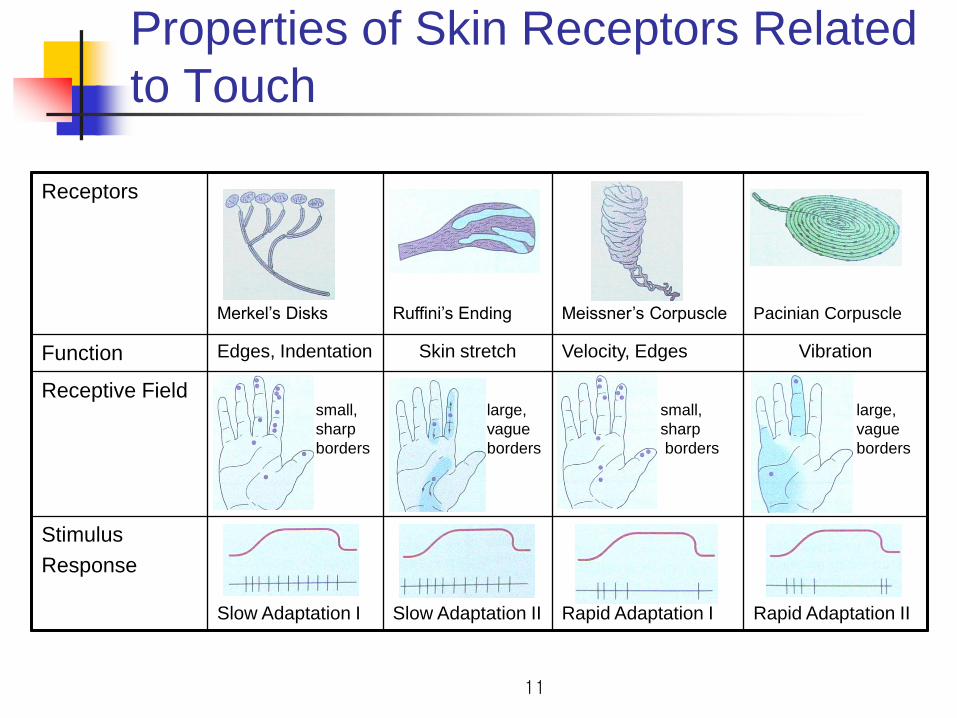
Properties of Skin Receptors Related
to Touch
Receptors
Merkel’s Disks Ruffini’s Ending Meissner’s Corpuscle Pacinian Corpuscle
Function Edges, Indentation Skin stretch Velocity, Edges Vibration
Receptive Fieldsmall,
sharp
borders
large,
vague
borders
small,
sharp
borders
large,
vague
borders
Stimulus
Response
Slow Adaptation I Slow Adaptation II Rapid Adaptation I Rapid Adaptation II

12
Touch Receptors Responding to
Braille
13
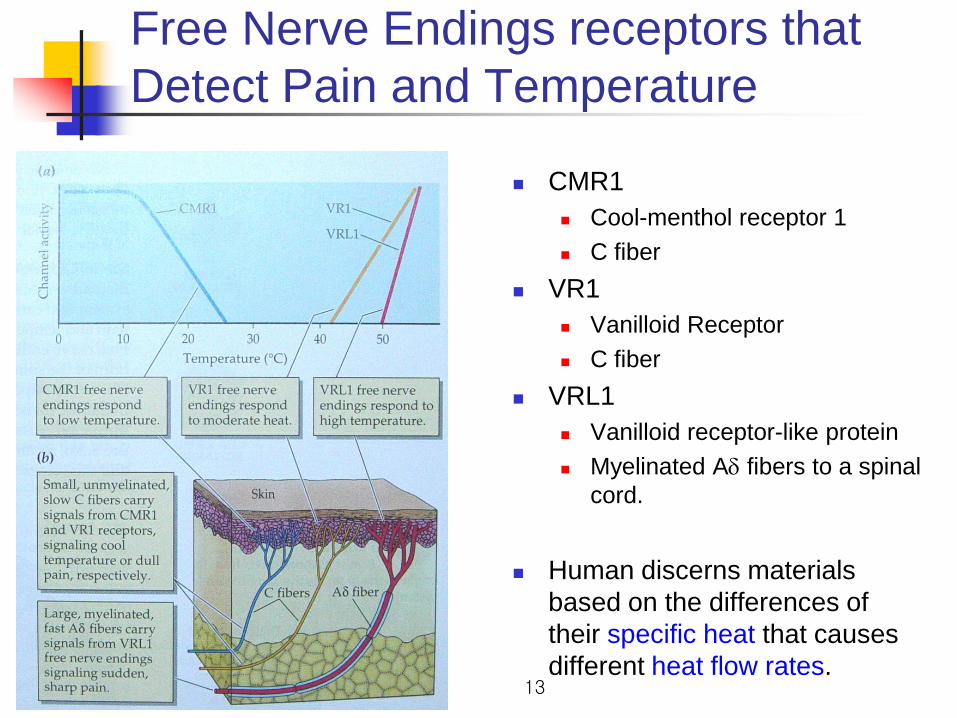
Free Nerve Endings receptors that
Detect Pain and Temperature
CMR1
Cool-menthol receptor 1
C fiber
VR1
Vanilloid Receptor
C fiber
VRL1
Vanilloid receptor-like protein
Myelinated Ad fibers to a spinal
cord.
Human discerns materials
based on the differences of
their specific heat that causes
different heat flow rates.
14
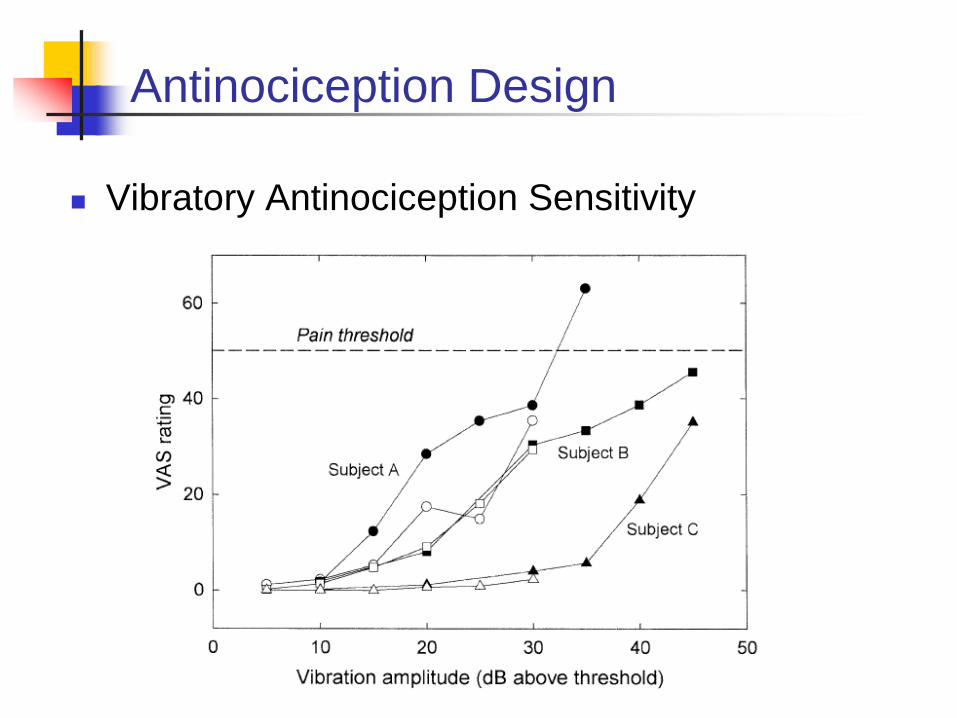
Antinociception Design
Vibratory Antinociception Sensitivity
15
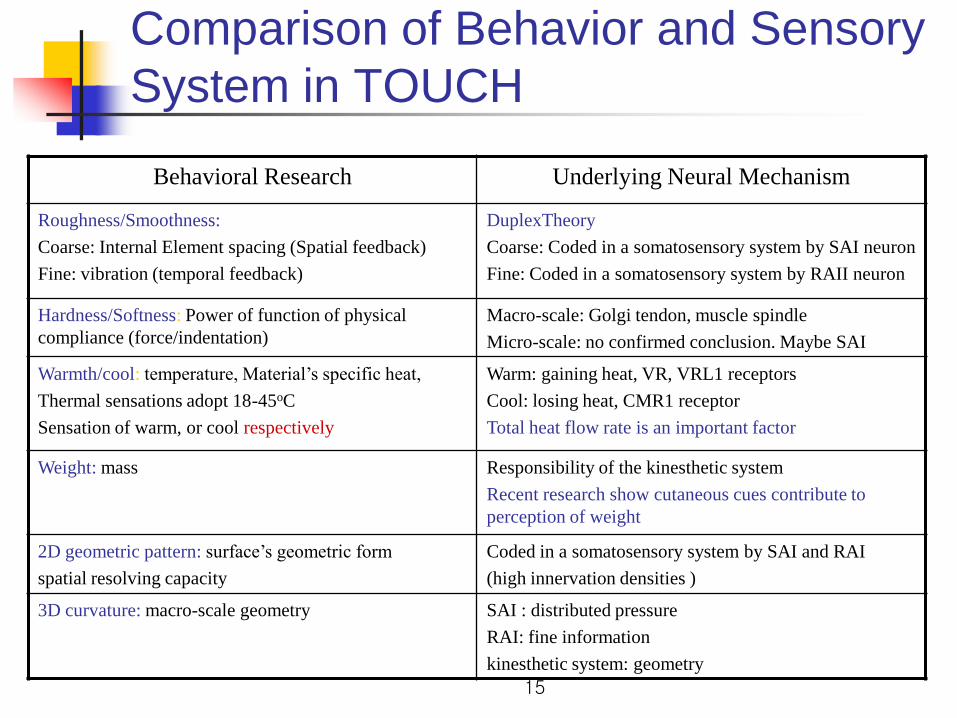
Comparison of Behavior and Sensory
System in TOUCH
Behavioral Research Underlying Neural Mechanism
Roughness/Smoothness:
Coarse: Internal Element spacing (Spatial feedback)
Fine: vibration (temporal feedback)
DuplexTheory
Coarse: Coded in a somatosensory system by SAI neuron
Fine: Coded in a somatosensory system by RAII neuron
Hardness/Softness: Power of function of physical
compliance (force/indentation)
Macro-scale: Golgi tendon, muscle spindle
Micro-scale: no confirmed conclusion. Maybe SAI
Warmth/cool: temperature, Material’s specific heat,
Thermal sensations adopt 18-45oC
Sensation of warm, or cool respectively
Warm: gaining heat, VR, VRL1 receptors
Cool: losing heat, CMR1 receptor
Total heat flow rate is an important factor
Weight: mass Responsibility of the kinesthetic system
Recent research show cutaneous cues contribute to
perception of weight
2D geometric pattern: surface’s geometric form
spatial resolving capacity
Coded in a somatosensory system by SAI and RAI
(high innervation densities )
3D curvature: macro-scale geometry SAI : distributed pressure
RAI: fine information
kinesthetic system: geometry

16
Vibrotactile Thresholds
PC : Pacinian fibers NPI: Meissner’s corpuscle NPII: Ruffini Ending NPIII : Merkel’s cell
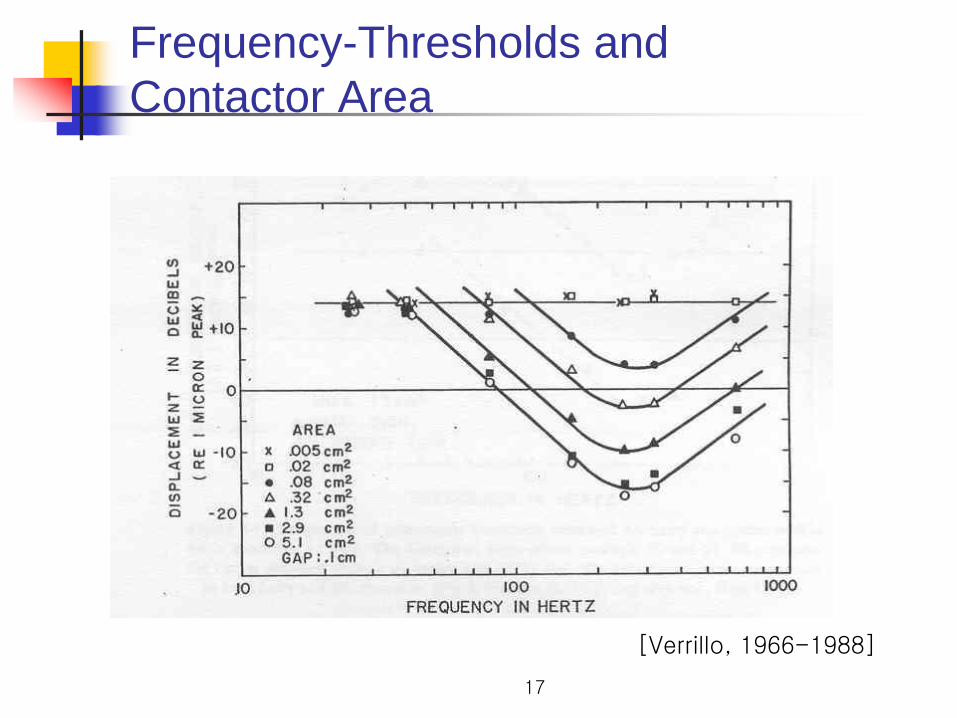
17
Frequency-Thresholds and
Contactor Area
[Verrillo, 1966-1988]
18
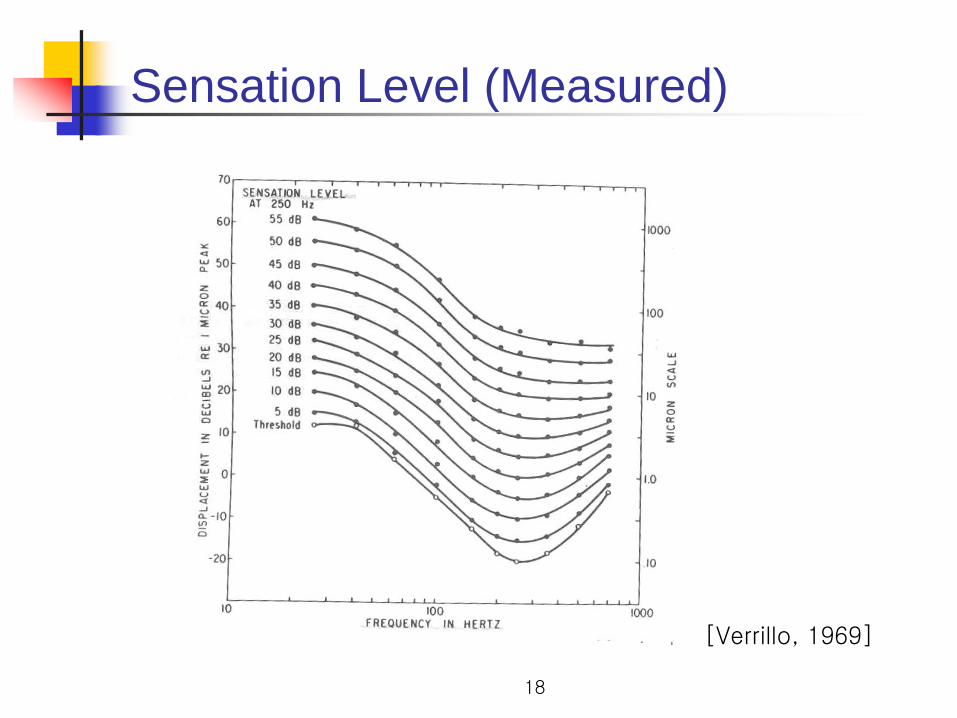
Sensation Level (Measured)
[Verrillo, 1969]
19
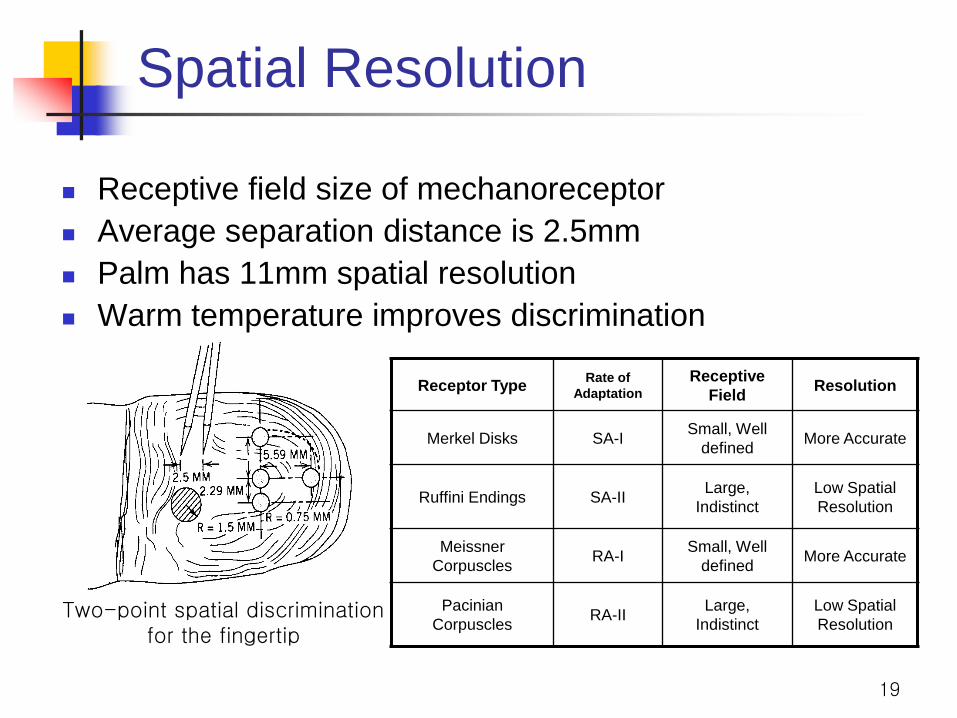
Spatial Resolution
Receptive field size of mechanoreceptor
Average separation distance is 2.5mm
Palm has 11mm spatial resolution
Warm temperature improves discrimination
Two-point spatial discrimination for the fingertip
Receptor TypeRate of
Adaptation
Receptive
FieldResolution
Merkel Disks SA-ISmall, Well
definedMore Accurate
Ruffini Endings SA-IILarge,
Indistinct
Low Spatial
Resolution
Meissner
CorpusclesRA-I
Small, Well
definedMore Accurate
Pacinian
CorpusclesRA-II
Large,
Indistinct
Low Spatial
Resolution
20
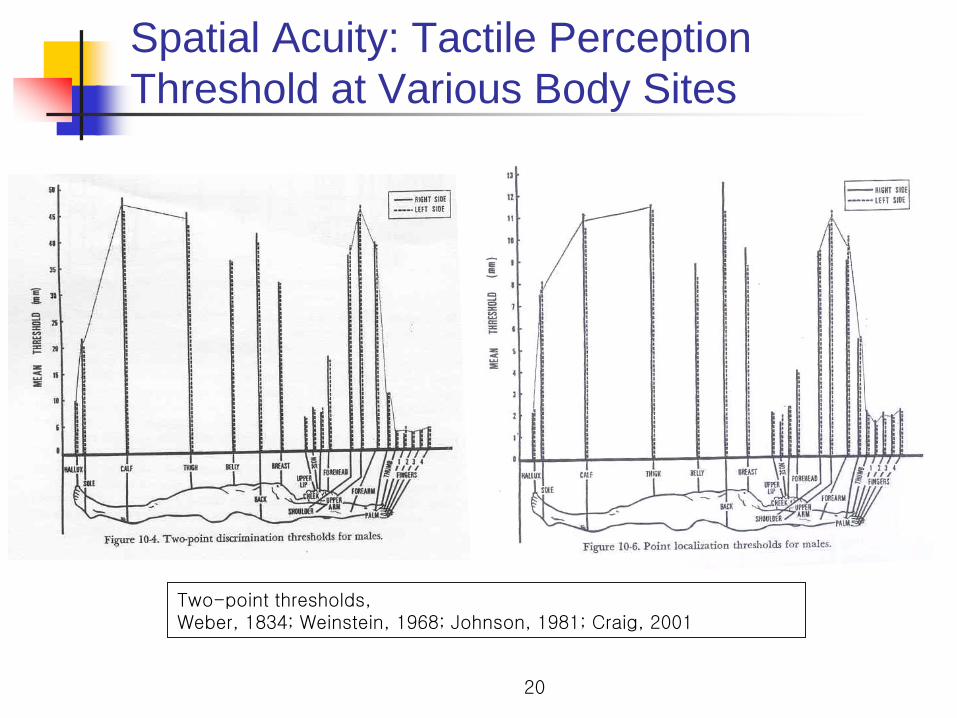
Spatial Acuity: Tactile Perception
Threshold at Various Body Sites
Two-point thresholds,Weber, 1834; Weinstein, 1968; Johnson, 1981; Craig, 2001

21
Temporal Resolution
Successiveness limen (SL)
the time threshold for which subjects are able to
detect two consecutive stimuli
Average SL value is around 5 msecs
But to perceive the order of stimuli, the same
time interval between stimuli grows to 20 msecs
22
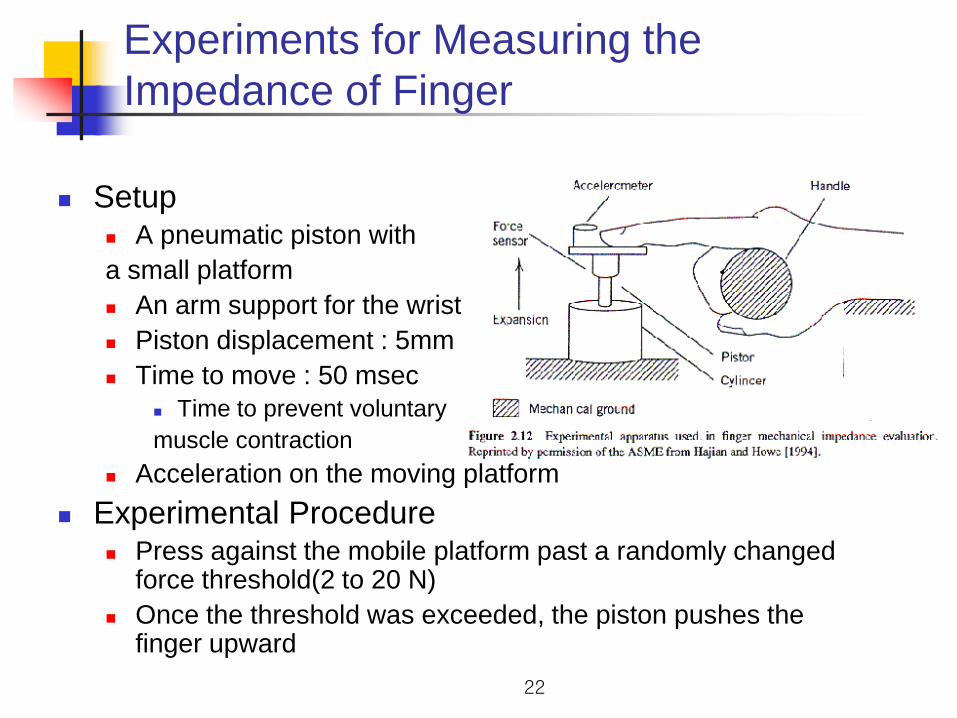
Experiments for Measuring the
Impedance of Finger
Setup A pneumatic piston with
a small platform
An arm support for the wrist
Piston displacement : 5mm
Time to move : 50 msec
Time to prevent voluntary
muscle contraction
Acceleration on the moving platform
Experimental Procedure Press against the mobile platform past a randomly changed
force threshold(2 to 20 N)
Once the threshold was exceeded, the piston pushes the finger upward
23
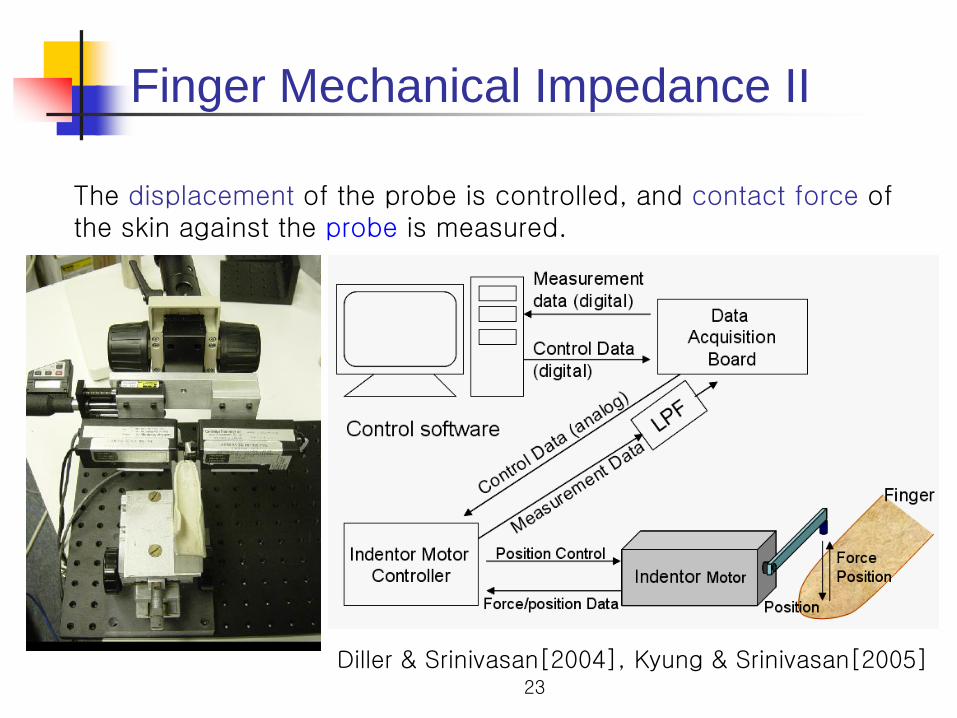
Finger Mechanical Impedance II
The displacement of the probe is controlled, and contact force of the skin against the probe is measured.
Diller & Srinivasan[2004], Kyung & Srinivasan[2005]

24
The Impedance of Skin and Stimulation
Frequency
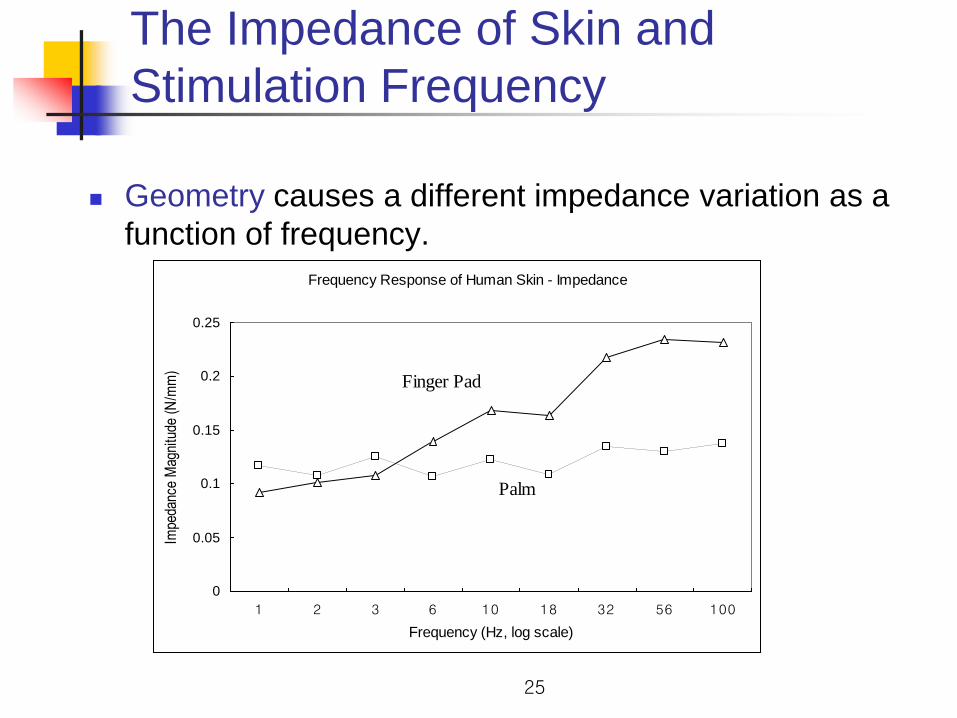
Measured the impedance of the finger tip and thenar eminance at 9 frequencies ranging from 1 Hz to 100 Hz.
Human tissues have viscoelestic property.
(a)Force vs. Position at 10 Hz (b) Force vs. Position at 32 Hz (c) Force vs. Position at 100 Hz
25
The Impedance of Skin and
Stimulation Frequency
Frequency Response of Human Skin - Impedance
0
0.05
0.1
0.15
0.2
0.25
1 2 3 6 10 18 32 56 100
Frequency (Hz, log scale)
Impe
danc
e M
agni
tude
(N
/mm
)
Finger Pad
Palm
Geometry causes a different impedance variation as a
function of frequency.
26
Outline
Introduction to tactile display
Nature of Human tactile perception
Neural Aspect of tactile perception
Biomechanics
Design of tactile display
Mechanism & Design Parameters
Materials
Examples of tactile displays
Reading list

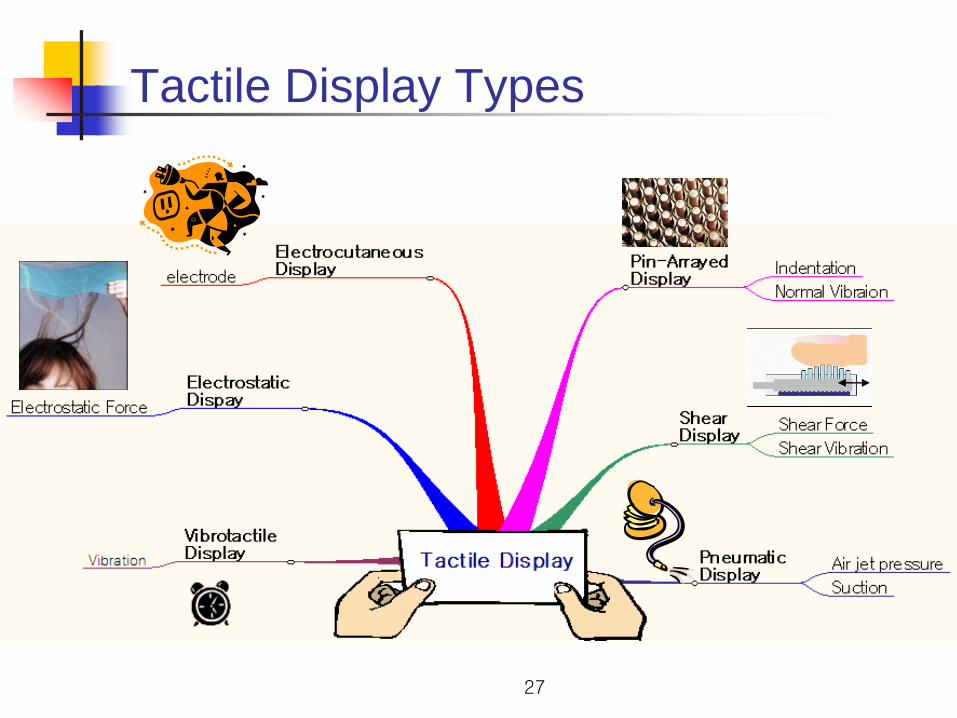
28
Pin-Arrayed Display
Normal movement of pin
The most typical
Design Parameters Actuator type
Number of pins, Arrangement
Pin diameter
Body part and gap of pins
Displacement
Exerting force
Frequency band width (response time)
Note Size of device, Size of power controller
29
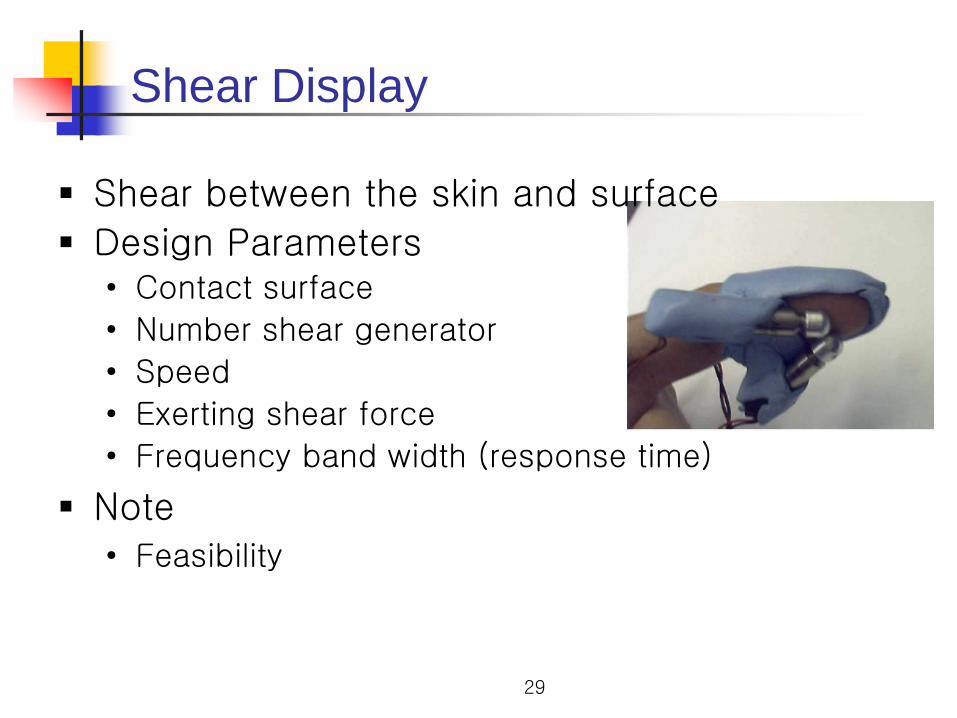
Shear Display
Shear between the skin and surface
Design Parameters• Contact surface
• Number shear generator
• Speed
• Exerting shear force
• Frequency band width (response time)
Note
• Feasibility
30
Pneumatic Display
Air jet pressure/suction
Design Parameters Shape of contact area
Power of compressor/pump
Number of nozzles, Gap of nozzles
Size of tube and hole
Maximum pressure
Frequency band width (response time)
Note Quantitative controllability
Size of device
31
Electrocutaneous Display
Electrode on the skin
Design Parameters
Supplying voltage/current
Number of electrode
Gap of electrodes
Body part and surface condition
Note
Electric shock
Feasibility

32
Electrostatic Display
Electrostatic force between the electrified material and electrode
Design Parameters Electric potential difference
Electrified material design
Electrode design
Number of electrodes
Body part and surface condition
Note Circuit design
Weak electrostatic force
33
Vibrotactile Display
Vibration
Design Parameters Vibrator type
Number of vibrators
Vibrator arrangement
Vibration intensity
Note Isolation of vibrators
Quantitative control
Temporal response
34
Thermal Display
Heat flow rate
Design parameters Heat capacity
Thermal conductivity & heat flow rate
Size of a thermal unit
Number of thermal units
Size of a temperature sensor
Bilateral current feedback circuit design
Note Cooler (Heat dissipation) design

35
Actuators & Materials
Linear motion type Piezoelectric actuator
Linear motor
Solenoid
Voice Coil
SMA (shape memory alloy)
Electro-active polymer
Shear type Piezoelectric bimorph
Electro-active polymer
Rotary motor
Vibration type Linear vibrator
Rotary vibrator
Pneumatic type• Piston• Air pressure• Suction
Electrotactile type• Electrostatic force• Electrocutaneous
stimulation
Friction/Viscosity type• Electro-Rheological Fluid• Magnetic-Rheological
Fluid
Thermoelectric type• Peltier module
36
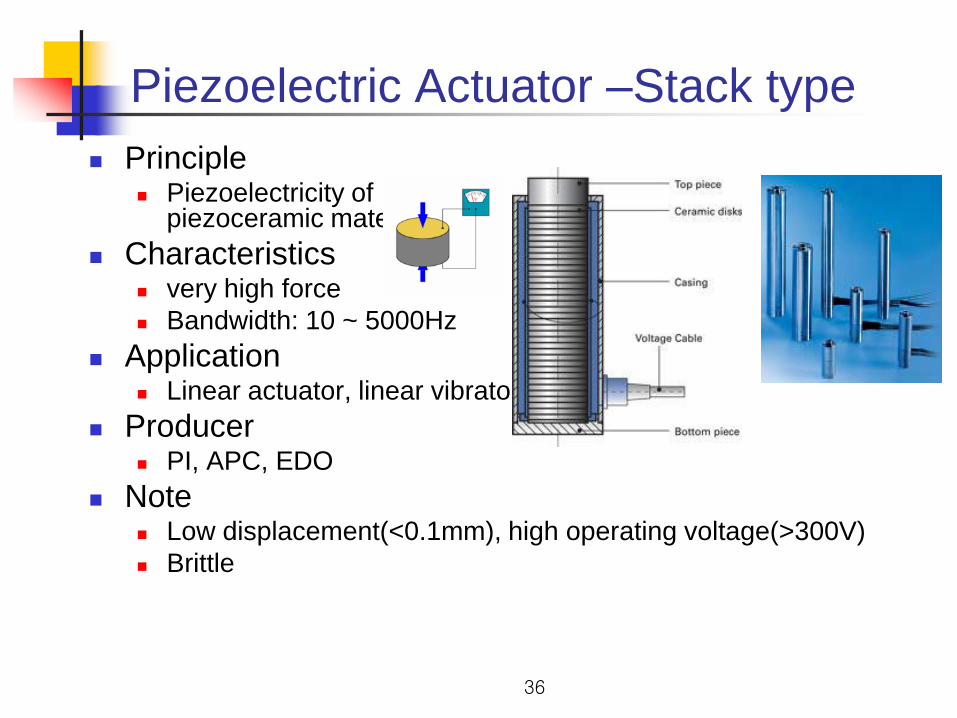
Piezoelectric Actuator –Stack type
Principle Piezoelectricity of
piezoceramic materials
Characteristics very high force
Bandwidth: 10 ~ 5000Hz
Application Linear actuator, linear vibrator
Producer PI, APC, EDO
Note Low displacement(<0.1mm), high operating voltage(>300V)
Brittle
37
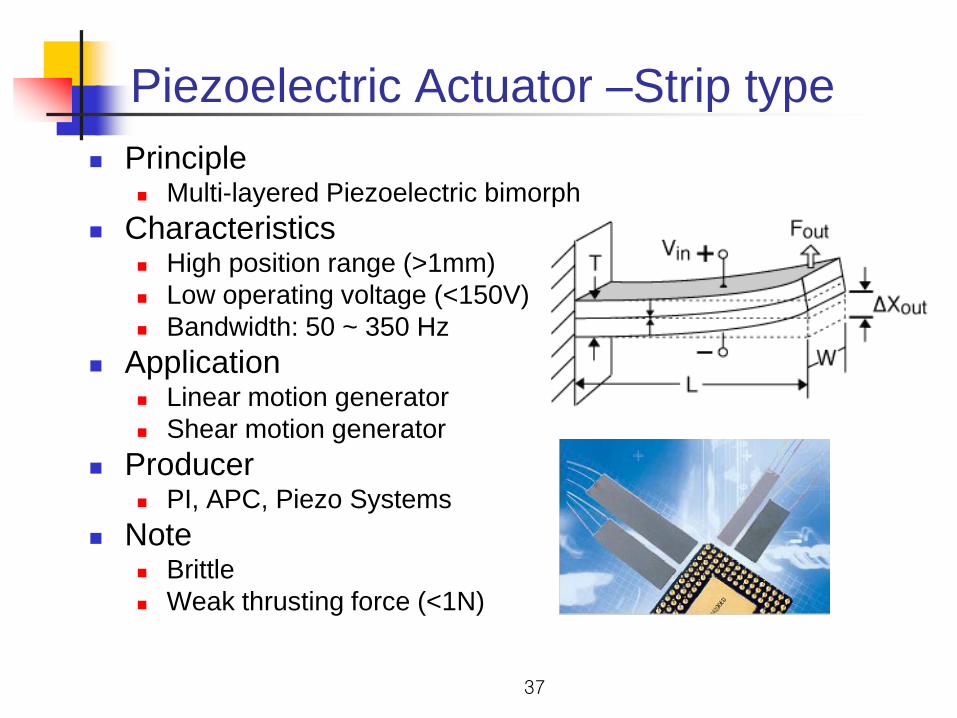
Piezoelectric Actuator –Strip type
Principle Multi-layered Piezoelectric bimorph
Characteristics High position range (>1mm)
Low operating voltage (<150V)
Bandwidth: 50 ~ 350 Hz
Application Linear motion generator
Shear motion generator
Producer PI, APC, Piezo Systems
Note Brittle
Weak thrusting force (<1N)

38
Piezoelectric Actuator – Ultrasonic
type
Principle Piezoelectric membrane
Repetition of impact movement
Characteristics Low operating voltage
High displacement
Bandwidth: 5~100 Hz
Application Small linear actuator
Producer Piezotechnology, PI
Note Weak thrusting force (<1.5N)
A
A
Shaft
Transducer
MovingElement

39
Piezoelectric Actuator – Disk type
Principle Stack type
Characteristics Strong Force > 10N
Nano-scale position resolution
Application Psychophysics Experiment
vibrator
Producer PI, APC
Note Size issue

40
Voice Coil Actuator (Transducer)
Principle• Coil moving in a magnetic field
Characteristics• Strong Force : 1~5000N
• Long Stroke, Fast response
Application• Servo component
• vibrator
Producer• BEI Kimco, EAI
Note• High thermal resistance
• Miniaturization issue

41
Shape Memory Alloy (SMA)
Principle
Cu-Zn-Al-Ni, Cu-Al-Ni, Ni-Ti alloys
Characteristics
Strong force
Easy to handle
Bandwidth < 10Hz
Application
Cable driven mechanism, Industry
Producer
Special Metals, Memry, Nimesis
Note
Cooler design issue
ξ (T) represents the martensite fraction
Ms : starts to change from austenite to martensite upon cooling
Mf : the temperature at which the transition is finished
As,Af: temperatures at which the reverse transformation from
martensite to austenite starts and finishes
SMA wire
SMA wire
42
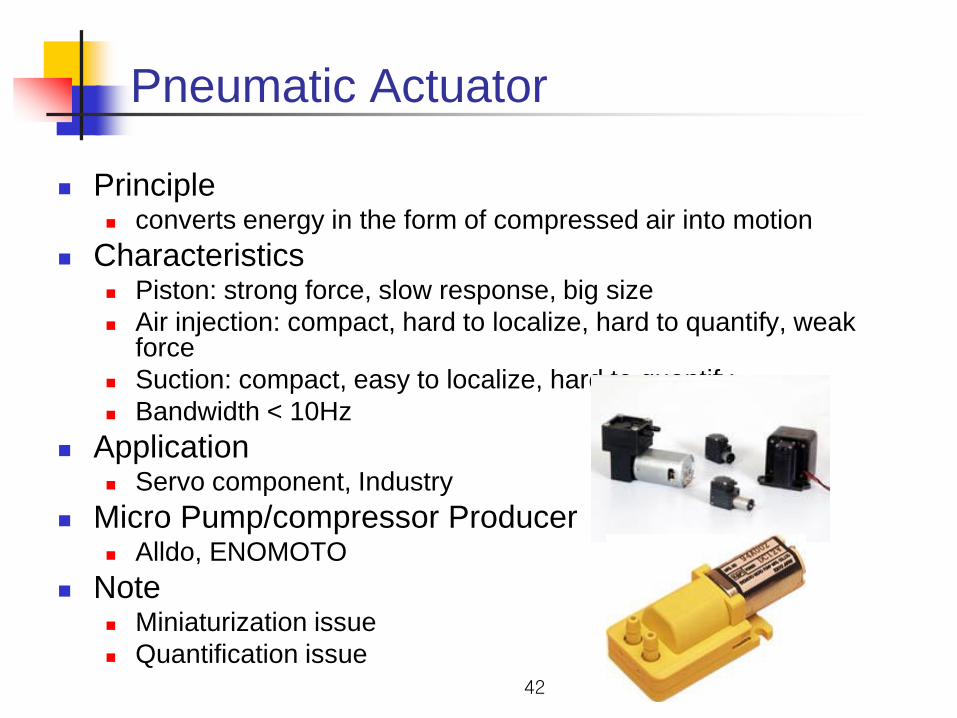
Pneumatic Actuator
Principle converts energy in the form of compressed air into motion
Characteristics Piston: strong force, slow response, big size
Air injection: compact, hard to localize, hard to quantify, weak force
Suction: compact, easy to localize, hard to quantify
Bandwidth < 10Hz
Application Servo component, Industry
Micro Pump/compressor Producer Alldo, ENOMOTO
Note Miniaturization issue
Quantification issue

43
Electroactive Polymer (EAP)
Principle Polymer type, a kind of piezoelectric materials
Characteristics Electronic types: rapid response (msec),
large force
Ionic type: large displacement, low operation voltage, bandwidth < 10Hz
Application Very small actuator and sensor
Artificial muscle
Producer Artificial Muscle, Inc.(AMI),
Note Electronic type: very high voltages required ( > 1000V),
circuit (high voltage DC-DC converter) design issue
Ionic type: ionized surface condition issue for deionization
Ionic type
44
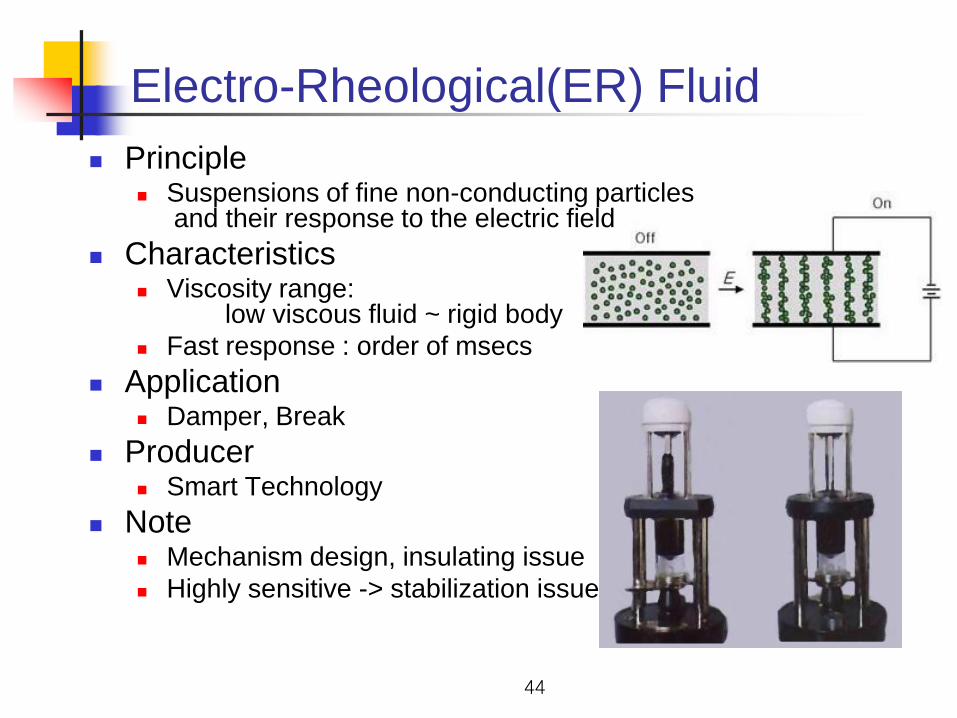
Electro-Rheological(ER) Fluid
Principle Suspensions of fine non-conducting particles
and their response to the electric field
Characteristics Viscosity range:
low viscous fluid ~ rigid body
Fast response : order of msecs
Application Damper, Break
Producer Smart Technology
Note Mechanism design, insulating issue
Highly sensitive -> stabilization issue

46
Magneto-Rheological (MR) Fluid
Principle suspension of micrometre-sized magnetic
particles in a carrier fluid and their responseto the magnetic field
Characteristics Viscosity range:
low viscous fluid ~ rigid body
Fast response : order of msecs
Application Damper, Break
Producer Lord Corp.
Note Mechanism design issue
Isolation issue
47
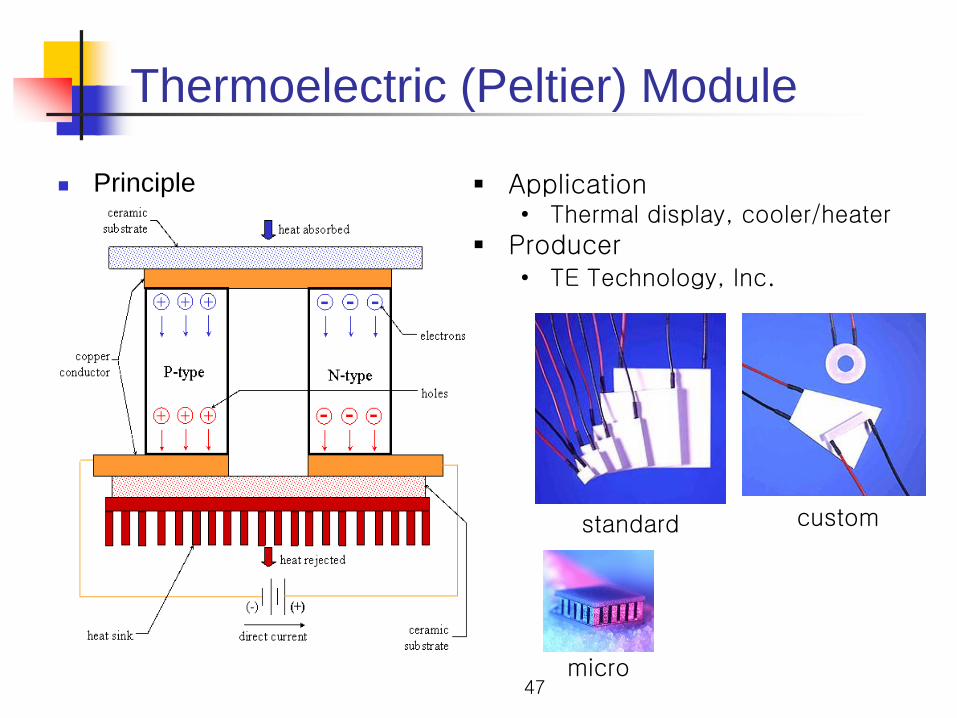
Thermoelectric (Peltier) Module
standard custom
micro
Principle Application• Thermal display, cooler/heater
Producer• TE Technology, Inc.
48
Outline
Introduction to tactile display
Nature of Human tactile perception
Neural Aspect of tactile perception
Biomechanics
Design of tactile display
Mechanism & Capability
Materials
Examples of tactile displays
Reading list

49
OPTACON: Braille Display
Braille Display
Optaton (Optical to Tactile CONverter)
Developer Telesensory Systems Inc, 1970~
Specification Text scanning and Braille display
Vibrotactile reading aid for the blind
Key technology Camera vision
Piezoelectric biomorphs
Link
http://www.freedomscientific.com/fs_downloads/optacon.asp

50
Braille Display
Smart Graphical Tactile device
Developer
Smart Technology, 2004~
Specification
Multi-line Braille display
A4 size full graphical tactile display
Key technology
ER fluid
Link
http://www.smarttec.co.uk/tactile.htm
51
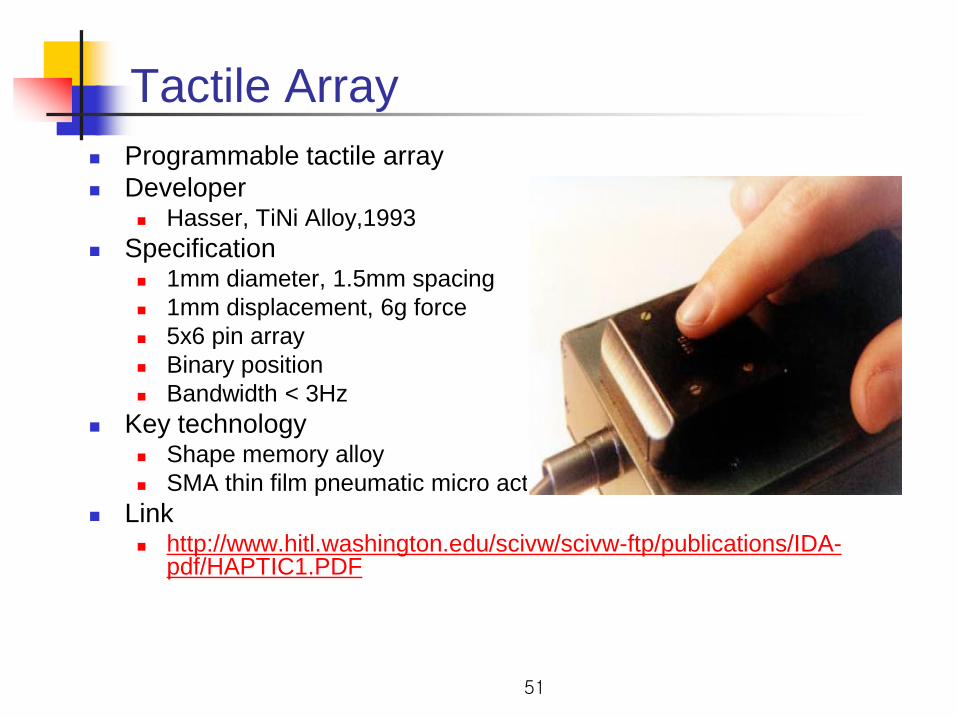
Tactile Array
Programmable tactile array
Developer Hasser, TiNi Alloy,1993
Specification 1mm diameter, 1.5mm spacing
1mm displacement, 6g force
5x6 pin array
Binary position
Bandwidth < 3Hz
Key technology Shape memory alloy
SMA thin film pneumatic micro actuator
Link http://www.hitl.washington.edu/scivw/scivw-ftp/publications/IDA-
pdf/HAPTIC1.PDF
52
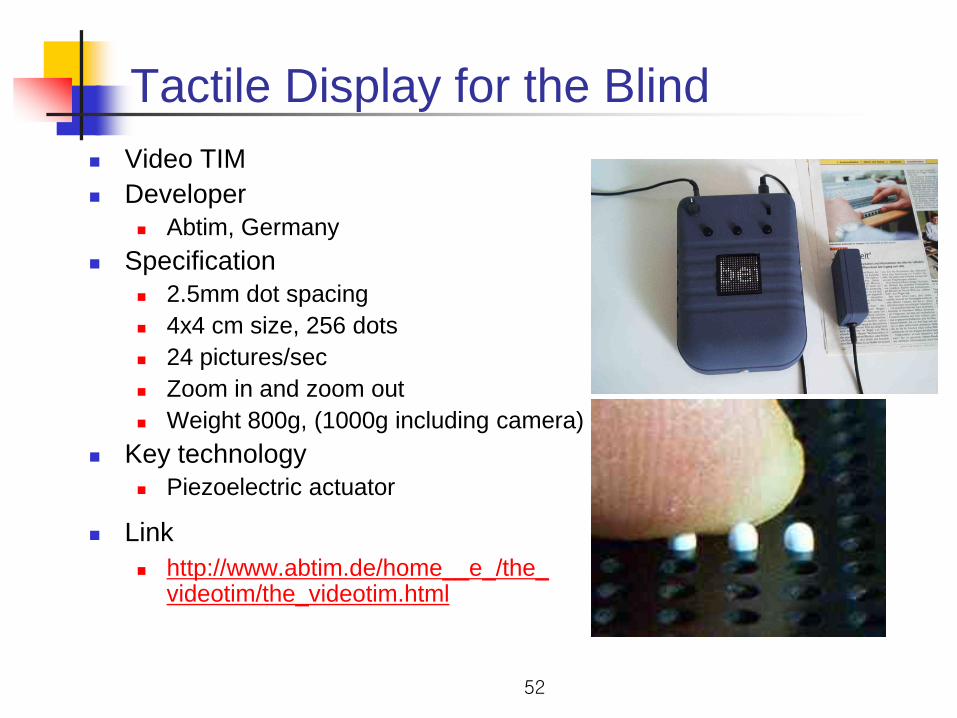
Tactile Display for the Blind
Video TIM
Developer
Abtim, Germany
Specification
2.5mm dot spacing
4x4 cm size, 256 dots
24 pictures/sec
Zoom in and zoom out
Weight 800g, (1000g including camera)
Key technology
Piezoelectric actuator
Link
http://www.abtim.de/home__e_/the_videotim/the_videotim.html

53
Vibratory Tactile Display with Pin-
array
Texture Explorer
Developer Ikei, 1997
Specification 5x10 pin array, 2mm spacing
0.5mm pin diameter
Fixed vibration frequency: 250Hz
150V driving voltage
Maximum displacement: 22μm
Texture display
Key technology Piezoelectric bimorph
Optacon mechanism
Link Vibratory Tactile Display of Image-Based Textures, Source IEEE
Computer Graphics and Applications
54
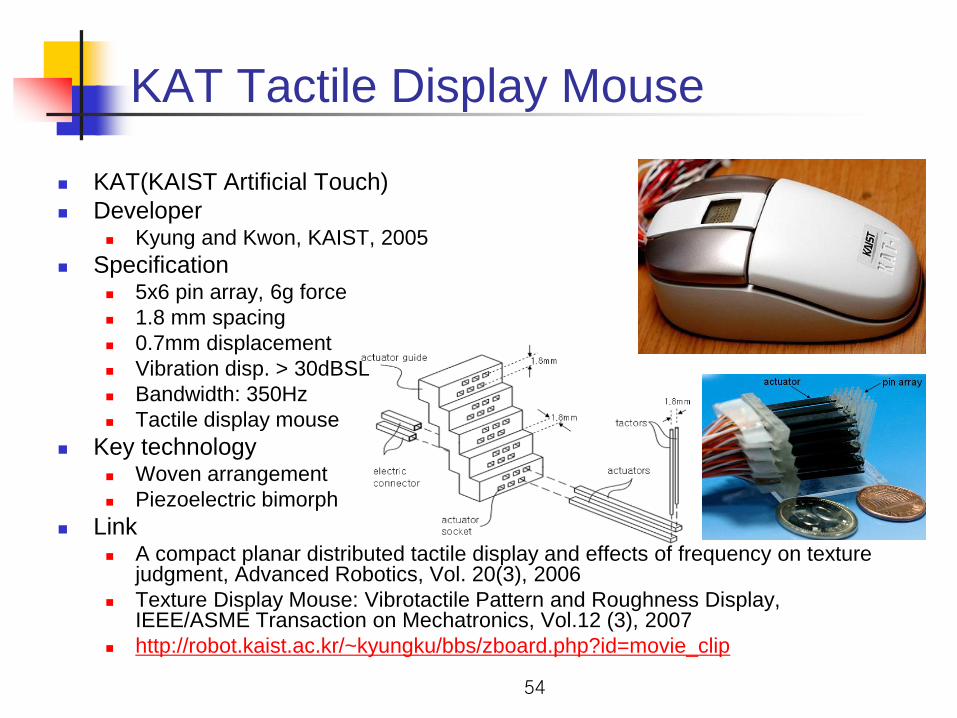
KAT(KAIST Artificial Touch)
Developer Kyung and Kwon, KAIST, 2005
Specification 5x6 pin array, 6g force
1.8 mm spacing
0.7mm displacement
Vibration disp. > 30dBSL
Bandwidth: 350Hz
Tactile display mouse
Key technology Woven arrangement
Piezoelectric bimorph
Link A compact planar distributed tactile display and effects of frequency on texture
judgment, Advanced Robotics, Vol. 20(3), 2006
Texture Display Mouse: Vibrotactile Pattern and Roughness Display, IEEE/ASME Transaction on Mechatronics, Vol.12 (3), 2007
http://robot.kaist.ac.kr/~kyungku/bbs/zboard.php?id=movie_clip
KAT Tactile Display Mouse
55
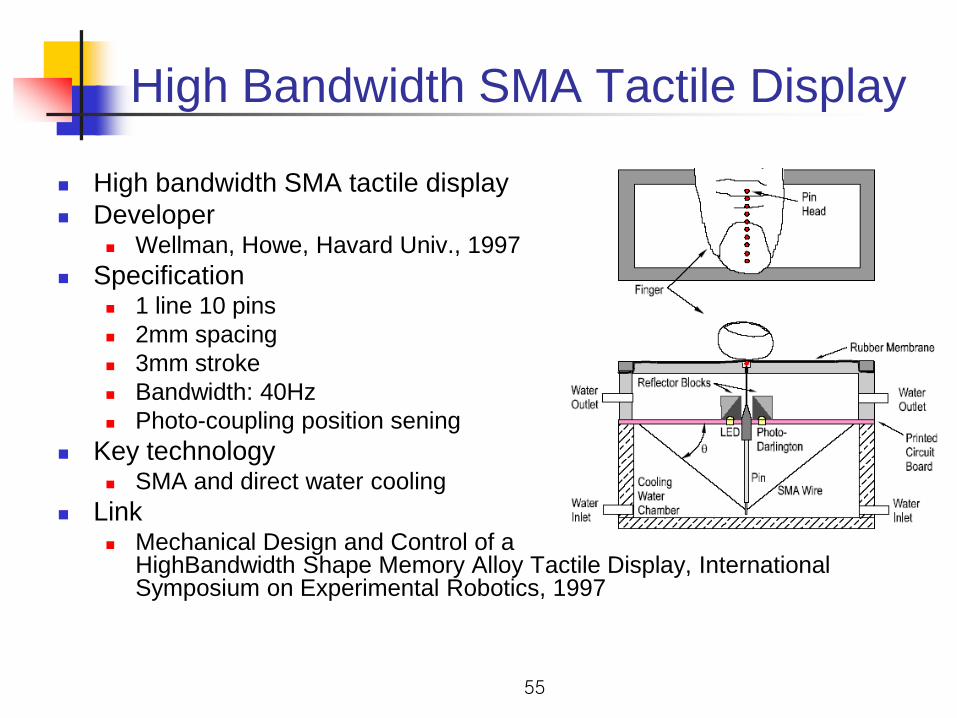
High Bandwidth SMA Tactile Display
High bandwidth SMA tactile display
Developer Wellman, Howe, Havard Univ., 1997
Specification 1 line 10 pins
2mm spacing
3mm stroke
Bandwidth: 40Hz
Photo-coupling position sening
Key technology SMA and direct water cooling
Link Mechanical Design and Control of a
HighBandwidth Shape Memory Alloy Tactile Display, International Symposium on Experimental Robotics, 1997
56
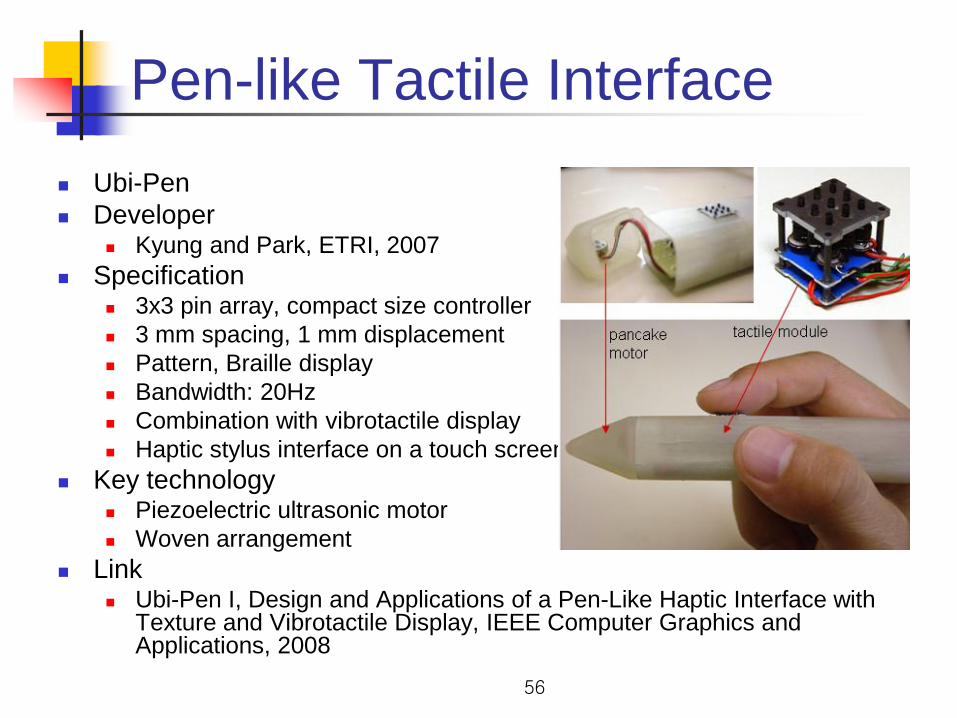
Pen-like Tactile Interface
Ubi-Pen
Developer Kyung and Park, ETRI, 2007
Specification 3x3 pin array, compact size controller
3 mm spacing, 1 mm displacement
Pattern, Braille display
Bandwidth: 20Hz
Combination with vibrotactile display
Haptic stylus interface on a touch screen
Key technology Piezoelectric ultrasonic motor
Woven arrangement
Link Ubi-Pen I, Design and Applications of a Pen-Like Haptic Interface with
Texture and Vibrotactile Display, IEEE Computer Graphics and Applications, 2008
57
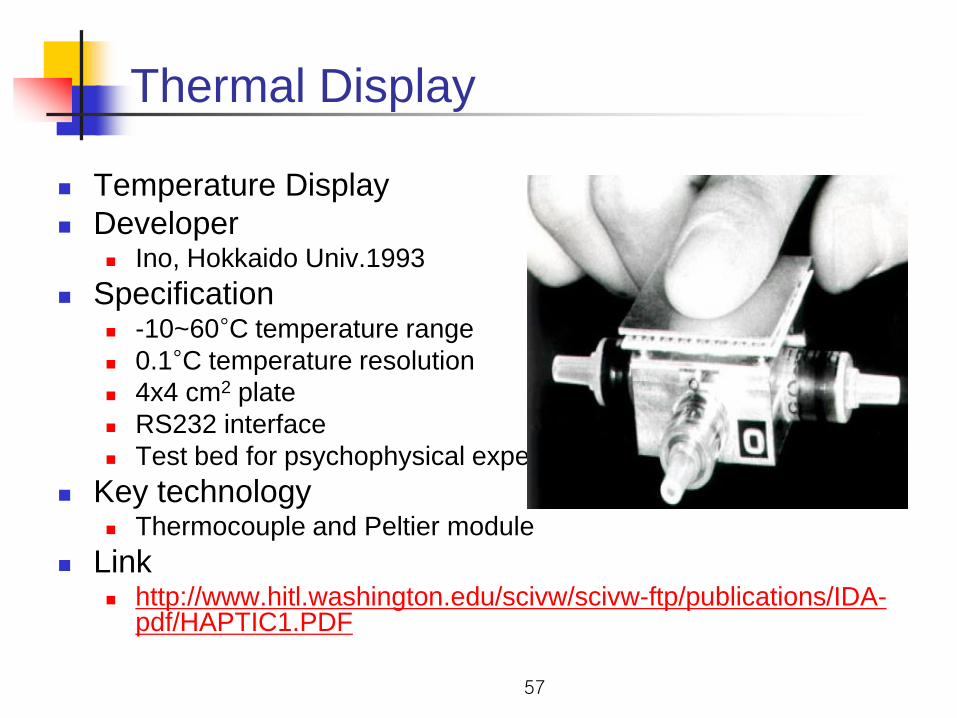
Thermal Display
Temperature Display
Developer Ino, Hokkaido Univ.1993
Specification -10~60°C temperature range
0.1°C temperature resolution
4x4 cm2 plate
RS232 interface
Test bed for psychophysical experiment
Key technology Thermocouple and Peltier module
Link http://www.hitl.washington.edu/scivw/scivw-ftp/publications/IDA-
pdf/HAPTIC1.PDF

58
Combination of Thermal Display and
Pin-Array
Holistic Tactile Display
Developer Yang, Kyung, Kwon, KAIST, 2006
Specification 1.8 mm pin spacing
0~50°C temperature range
2°C/s cooling rate, 4°C/s heating rate
Holistic display mouse
Key technology RTD and Peltier module
Link Quantitative Tactile Display Device
with Pin-Array Type Tactile Feedback and Thermal Feedback, ICRA2006
59
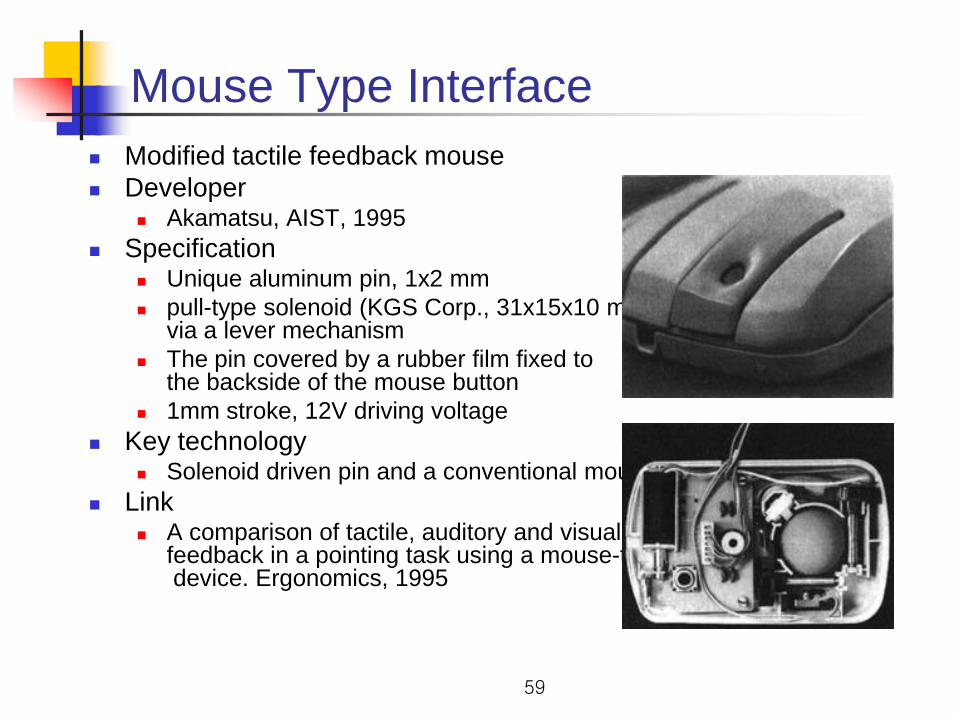
Mouse Type Interface
Modified tactile feedback mouse
Developer Akamatsu, AIST, 1995
Specification Unique aluminum pin, 1x2 mm
pull-type solenoid (KGS Corp., 31x15x10 mm)via a lever mechanism
The pin covered by a rubber film fixed to the backside of the mouse button
1mm stroke, 12V driving voltage
Key technology Solenoid driven pin and a conventional mouse
Link A comparison of tactile, auditory and visual
feedback in a pointing task using a mouse-typedevice. Ergonomics, 1995
60
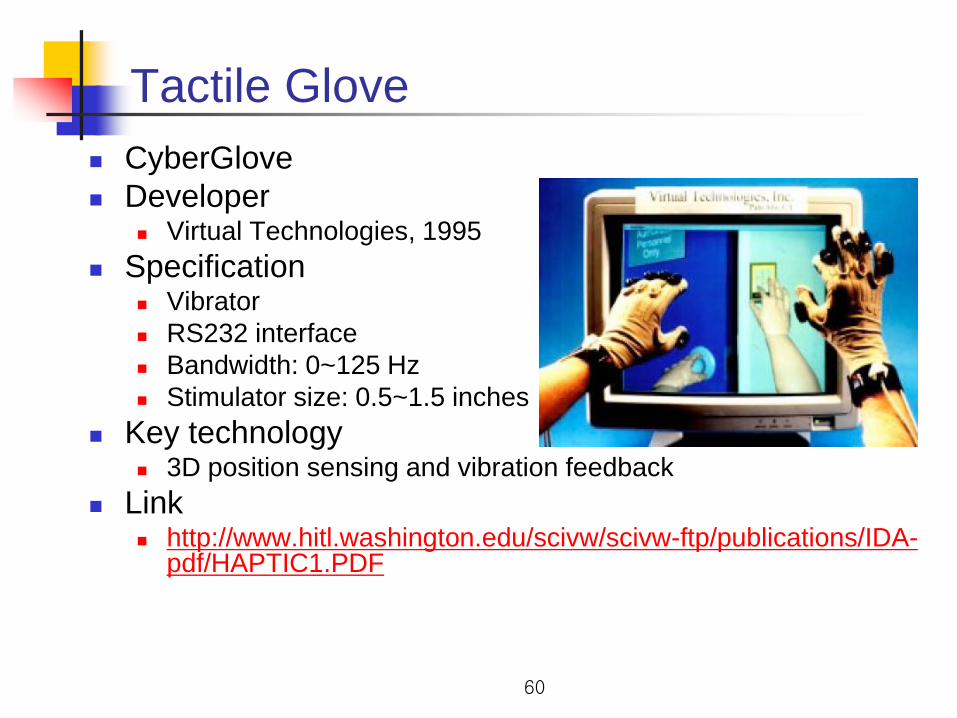
Tactile Glove
CyberGlove
Developer Virtual Technologies, 1995
Specification Vibrator
RS232 interface
Bandwidth: 0~125 Hz
Stimulator size: 0.5~1.5 inches
Key technology 3D position sensing and vibration feedback
Link http://www.hitl.washington.edu/scivw/scivw-ftp/publications/IDA-
pdf/HAPTIC1.PDF
61
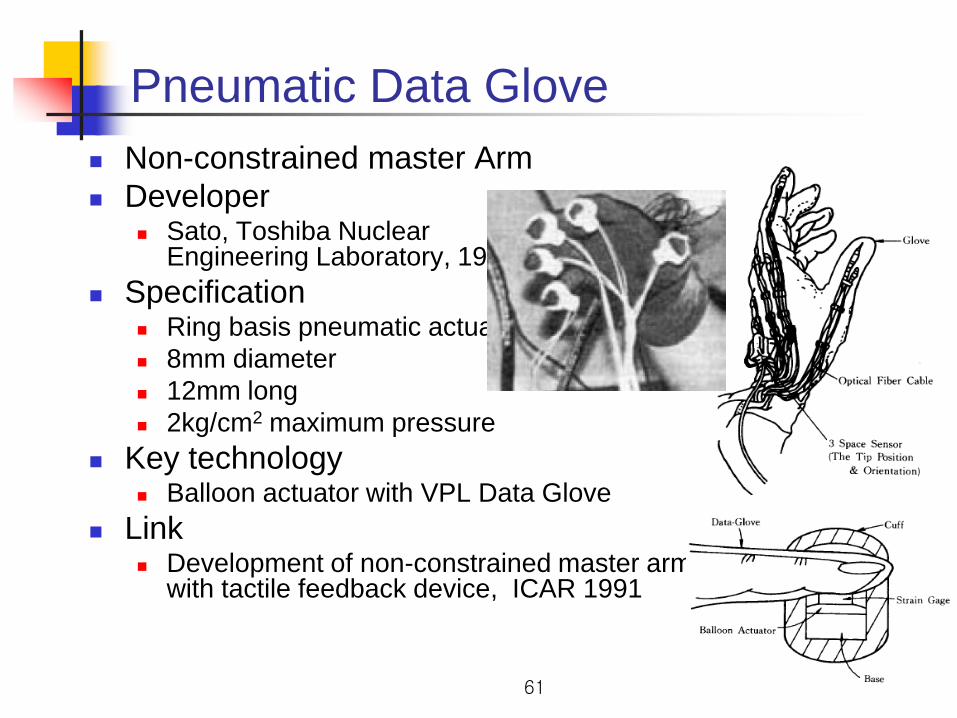
Pneumatic Data Glove
Non-constrained master Arm
Developer Sato, Toshiba Nuclear
Engineering Laboratory, 1991
Specification Ring basis pneumatic actuator
8mm diameter
12mm long
2kg/cm2 maximum pressure
Key technology Balloon actuator with VPL Data Glove
Link Development of non-constrained master arm
with tactile feedback device, ICAR 1991

62
Pneumatic Tactile Display
ARRL Interface
Developer Salford University
Specification Three pneumatic actuators
Tactile feedback when hand enters incontact with a virtual object
Pins are controlled by servo-valve
Key technology Pneumatic actuators (inflating balloons)
Link Tactile interfaces: a state-of-the-art survey - Int. Symposium on
Robotics, 2004
63
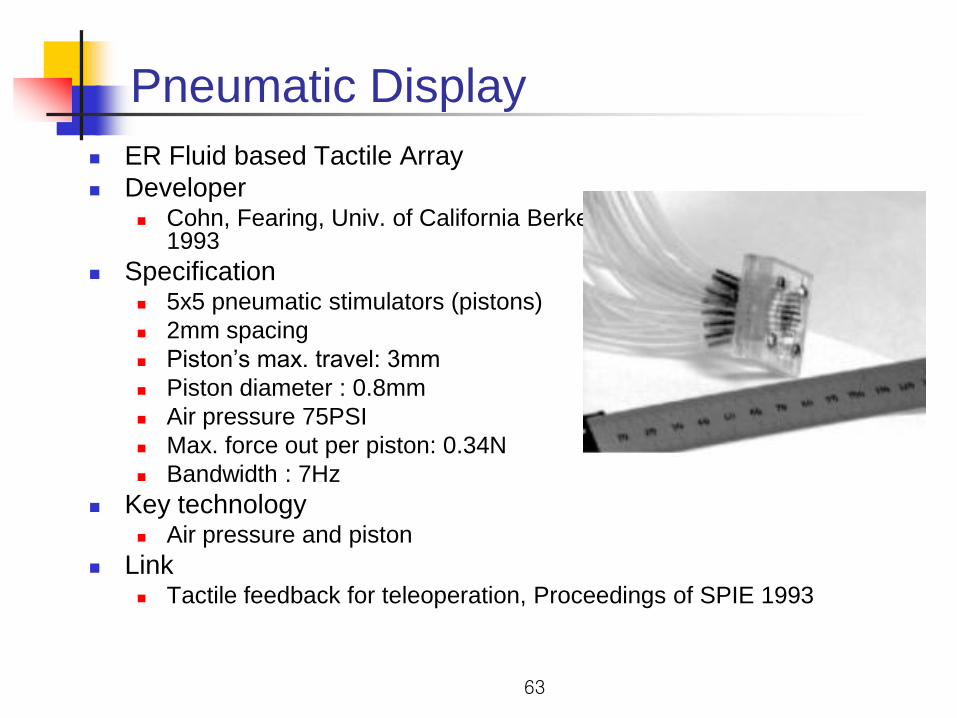
Pneumatic Display
ER Fluid based Tactile Array
Developer Cohn, Fearing, Univ. of California Berkeley,
1993
Specification 5x5 pneumatic stimulators (pistons)
2mm spacing
Piston’s max. travel: 3mm
Piston diameter : 0.8mm
Air pressure 75PSI
Max. force out per piston: 0.34N
Bandwidth : 7Hz
Key technology Air pressure and piston
Link Tactile feedback for teleoperation, Proceedings of SPIE 1993
64
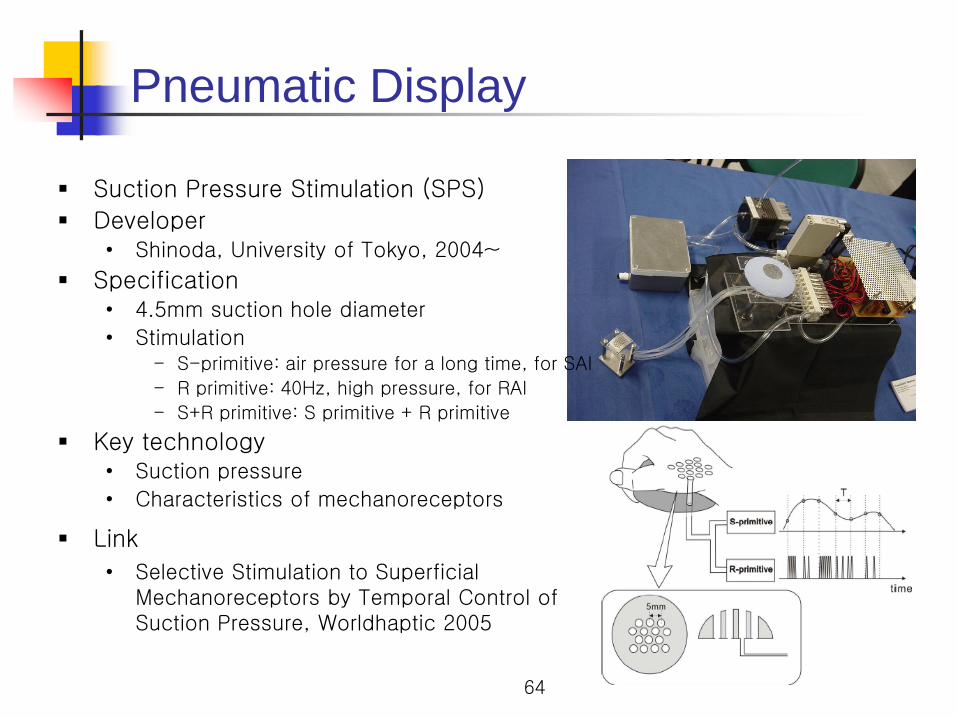
Pneumatic Display
Suction Pressure Stimulation (SPS)
Developer• Shinoda, University of Tokyo, 2004~
Specification• 4.5mm suction hole diameter
• Stimulation- S-primitive: air pressure for a long time, for SAI
- R primitive: 40Hz, high pressure, for RAI
- S+R primitive: S primitive + R primitive
Key technology• Suction pressure
• Characteristics of mechanoreceptors
Link
• Selective Stimulation to Superficial Mechanoreceptors by Temporal Control of Suction Pressure, Worldhaptic 2005
65
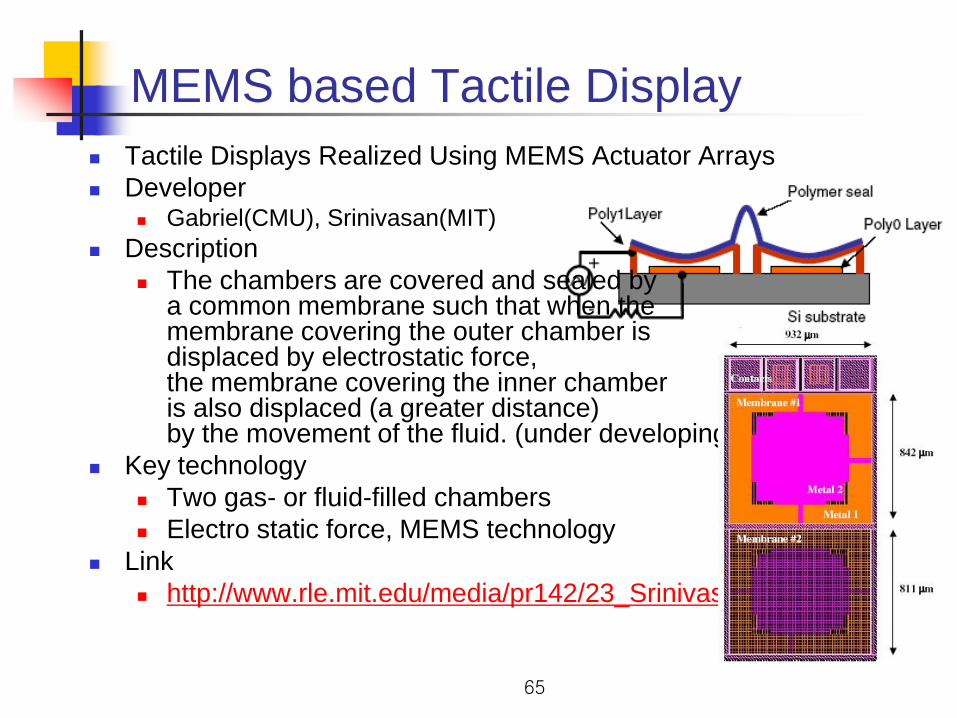
MEMS based Tactile Display
Tactile Displays Realized Using MEMS Actuator Arrays
Developer Gabriel(CMU), Srinivasan(MIT)
Description
The chambers are covered and sealed bya common membrane such that when the membrane covering the outer chamber is displaced by electrostatic force, the membrane covering the inner chamber is also displaced (a greater distance) by the movement of the fluid. (under developing)
Key technology
Two gas- or fluid-filled chambers
Electro static force, MEMS technology
Link
http://www.rle.mit.edu/media/pr142/23_Srinivasan_02.pdf

66
Shear Display
Artificial Tactile Feel Display
Developer Konyo, Takamori, Tohoku Univ. 2003
Specification 5x11 cilia
Slope: 45° Bandwidth > 100Hz
1.0~1.5V driving voltage
Submerged in the water
Indentation and shear
Key technology Electro Active Polymer, ICPF
(Ionic Conducting Polymer gel Film)
Link Artificial tactile feel display using soft
gel actuators, Proc. IEEE ICRA2000.

67
Passive Tactile Display
ER Fluid based Tactile Array
Developer Taylor, Hull University, 1998
Specification 5x5 tactile array
Supply voltage: 3kV
Conductive rubber thickness 0.28mm
11mm sided aluminum square
2mm gap
Scanned with fixed speed of 8mm/s
Key technology Electro Active Polymer, ICPF
(Ionic Conducting Polymer gel Film)
Link Advances in an electrorheological fluid
based tactile array, Displays, 1998
68
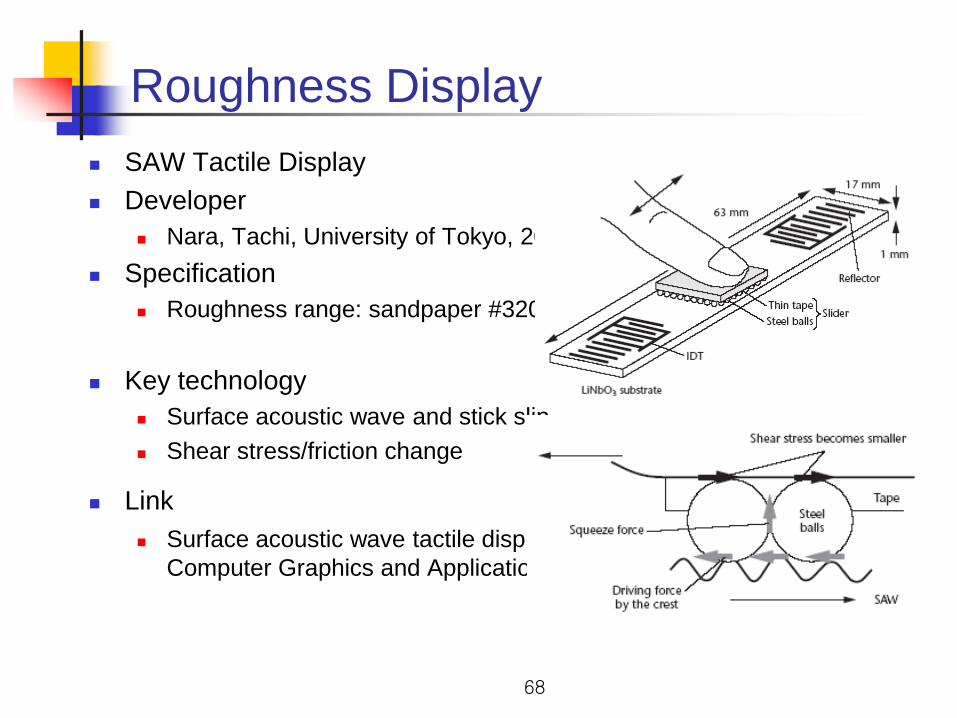
Roughness Display
SAW Tactile Display
Developer
Nara, Tachi, University of Tokyo, 2001
Specification
Roughness range: sandpaper #320~#60
Key technology
Surface acoustic wave and stick slip
Shear stress/friction change
Link
Surface acoustic wave tactile display,
Computer Graphics and Applications, 2001

69
3D Tangible Display
The MATRIX (Multipurpose Arrayof Tactile Rods for Interactive eXpression)
Developer
Overholt, MIT Media Lab, 2001
Specification
3 dimensional tangible interface
12x12 grid
Optical position sensing
For musical expression
Key technology
Spring mounted rod
Link
Multipurpose Array of Tangile Rods for Interactive sXpression, SIGGRAPH 2001
70
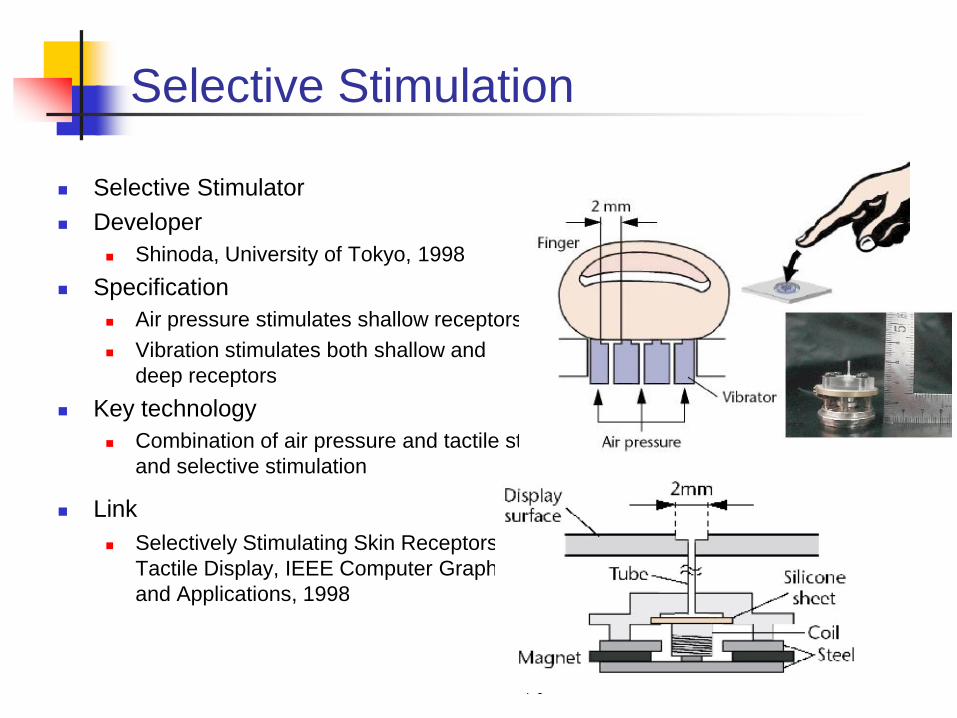
Selective Stimulation
Selective Stimulator
Developer
Shinoda, University of Tokyo, 1998
Specification
Air pressure stimulates shallow receptors
Vibration stimulates both shallow and
deep receptors
Key technology
Combination of air pressure and tactile stimuli
and selective stimulation
Link
Selectively Stimulating Skin Receptors for
Tactile Display, IEEE Computer Graphics
and Applications, 1998
71
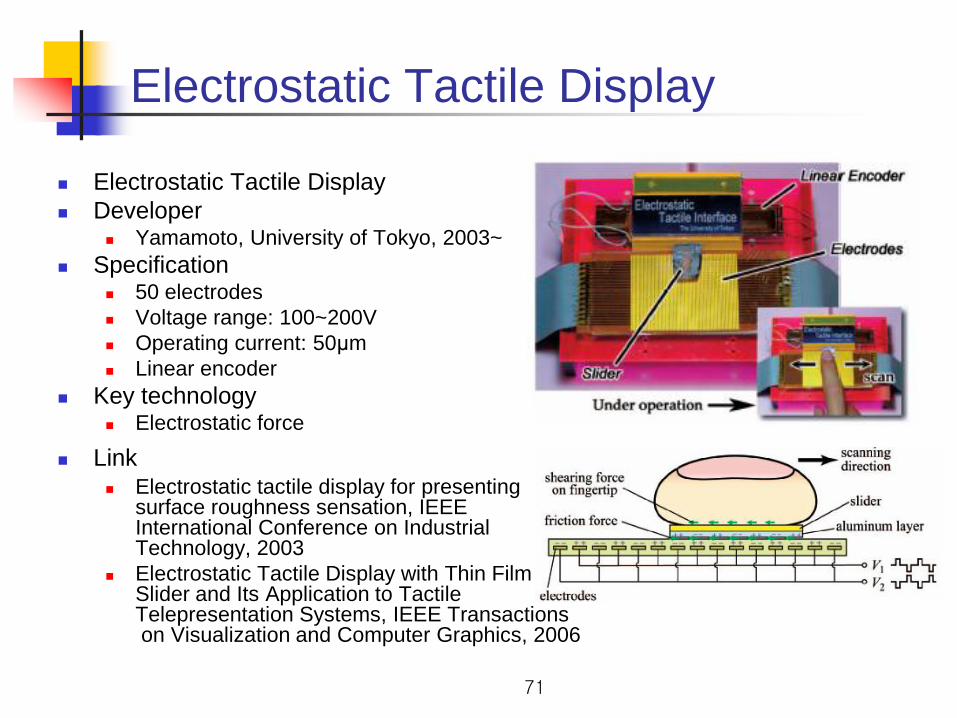
Electrostatic Tactile Display
Electrostatic Tactile Display
Developer Yamamoto, University of Tokyo, 2003~
Specification 50 electrodes
Voltage range: 100~200V
Operating current: 50μm
Linear encoder
Key technology Electrostatic force
Link Electrostatic tactile display for presenting
surface roughness sensation, IEEE International Conference on Industrial Technology, 2003
Electrostatic Tactile Display with Thin Film Slider and Its Application to Tactile Telepresentation Systems, IEEE Transactionson Visualization and Computer Graphics, 2006
72
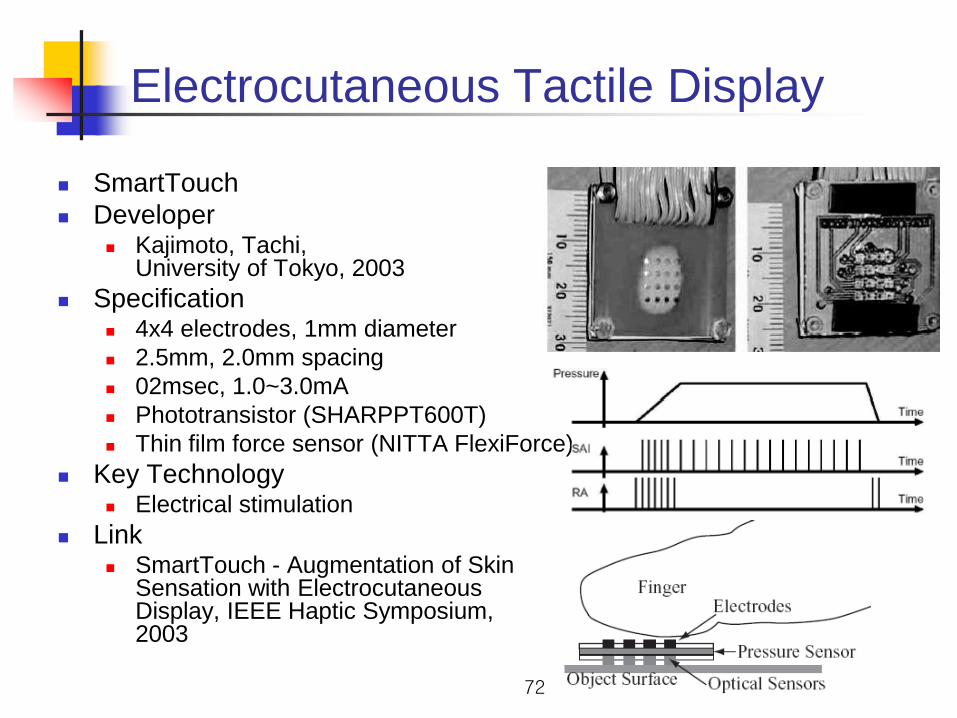
Electrocutaneous Tactile Display
SmartTouch
Developer Kajimoto, Tachi,
University of Tokyo, 2003
Specification 4x4 electrodes, 1mm diameter
2.5mm, 2.0mm spacing
02msec, 1.0~3.0mA
Phototransistor (SHARPPT600T)
Thin film force sensor (NITTA FlexiForce)
Key Technology Electrical stimulation
Link SmartTouch - Augmentation of Skin
Sensation with Electrocutaneous Display, IEEE Haptic Symposium, 2003
73
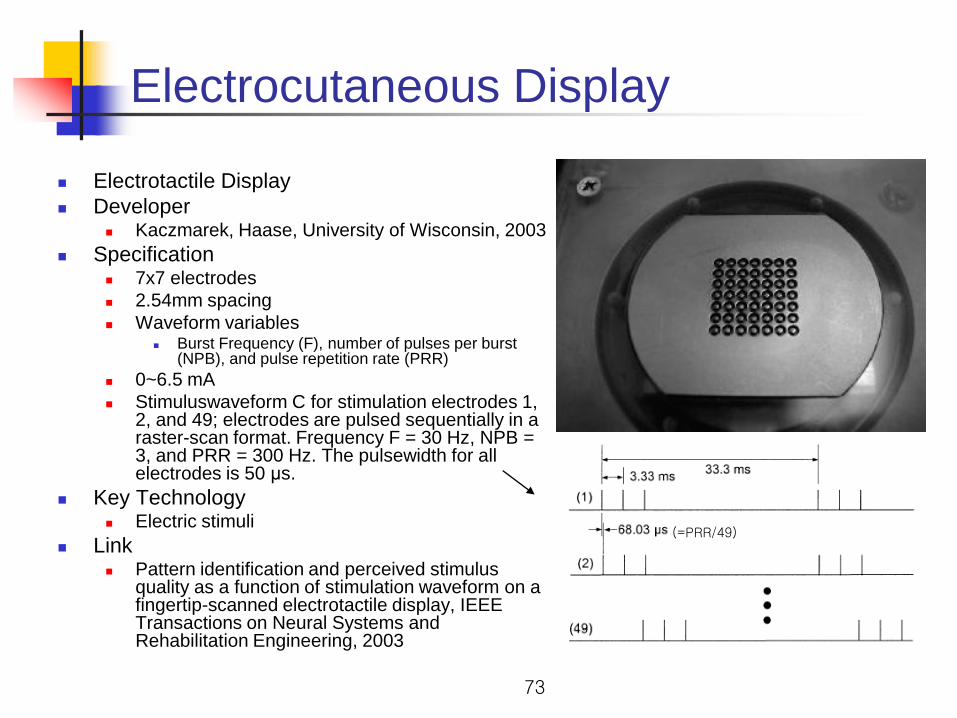
Electrocutaneous Display
Electrotactile Display
Developer Kaczmarek, Haase, University of Wisconsin, 2003
Specification 7x7 electrodes
2.54mm spacing
Waveform variables Burst Frequency (F), number of pulses per burst
(NPB), and pulse repetition rate (PRR)
0~6.5 mA
Stimuluswaveform C for stimulation electrodes 1, 2, and 49; electrodes are pulsed sequentially in a raster-scan format. Frequency F = 30 Hz, NPB = 3, and PRR = 300 Hz. The pulsewidth for all electrodes is 50 μs.
Key Technology Electric stimuli
Link Pattern identification and perceived stimulus
quality as a function of stimulation waveform on a fingertip-scanned electrotactile display, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2003
(=PRR/49)

74
Wearable Tactile Display
Wearable tactile feel display
Developer Konyo, Takamori, Tohoku Univ. 2003
Specification
sufficient softness :Young’s modulusE = 2.2 × 108 Pa
High-speed response ( > 200 Hz)
low operation voltage : 0.5 − 6.0 V
Key technology Electro Active Polymer
ICPF (Ionic Conducting Polymer gel Film)
Simple operation mechanism and miniaturization
Link Tactile Feel Display for Virtual Active Touch,
Proc. IEEE/RSJ IROS 2003.

75
Wearable Tactile Display
Arm Array, Torso Band
Developer Piateski, Jones, MIT, 2005
Specification 3x3 cylindrical vibrating motor array
2.5~8.8V
24mm spacing
4x4 pan-cake motor array 2.0~4.0 V
40mm, 60mm spacing
Pulse of the motor lasted approximately 0.5 s
The pulses were separated by a gap of 0.5 s.
Pattern generation
Key Technology Vibrator: cylindrical type, pan-cake type
Link Vibrotactile pattern recognition on the arm
and torso, Worldhaptics 2005

76
Wearable Hapic Display
Wearable Haptic Display for Situation Awareness
Developer Traylor, Tan, Purdue Univ., 2002
Specification The tactor
modified from a flat speaker
4 cm diameter
resonant frequency: 300 Hz
Different loudness of vibrotactile stimulation under different gravity conditions.
Tactors on arm and the back
Key technology From vibration intensity to perceived acceleration
Link Development of a Wearable Haptic Display
for Situation Awareness in Altered-gravity Environment: Some Initial Findings, IEEE Haptic Symposium 2002

Combination of Tactile and Kinaesthetic
Display
T-pad
Mechanism
Piezoelectric disc
2DOF Pantograph
Tactile Information
Surface Friction
patterns
77
Haptics for Mobile Devices

79
Commercial Tactile Interface for
Mobile Device
VibeTonz
Developer Immersion Corporation, 200x
Specification Vibration effect
available for the mobile implementation environments including C, C++, Java, BREW, and WIPI.
Alert, Caller ID, music, messaging, ringtones, and gaming
Key technology SDK and VibeTonz Actuator
Link http://www.immersion.com/mobility/
http://www.immersion.com/mobility/docs/VibeTonz_Mobile_Player_0305_v1.pdf
80
Haptic Emoticon
Haptic emoticon
Developer Immersion Corporation, 2006
Specification The feeling mail service
Combination of vibration and light
Key technology VibeTonz
Link http://static.fiercemarkets.com/public
/ads/immersion/haptics_improving-mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
http://static.fiercemarkets.com/public�/ads/immersion/haptics_improving-�mobile-ue-through-touch.pdf
81
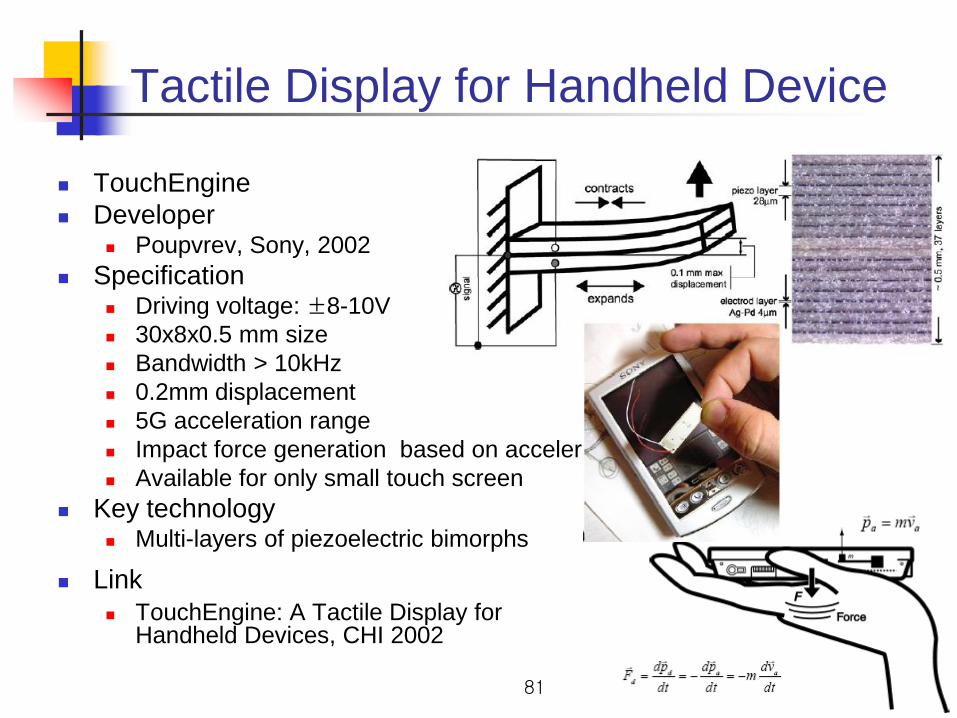
TouchEngine
Developer Poupvrev, Sony, 2002
Specification Driving voltage: ±8-10V
30x8x0.5 mm size
Bandwidth > 10kHz
0.2mm displacement
5G acceleration range
Impact force generation based on acceleration
Available for only small touch screen
Key technology Multi-layers of piezoelectric bimorphs
Link
TouchEngine: A Tactile Display for Handheld Devices, CHI 2002
Tactile Display for Handheld Device
82
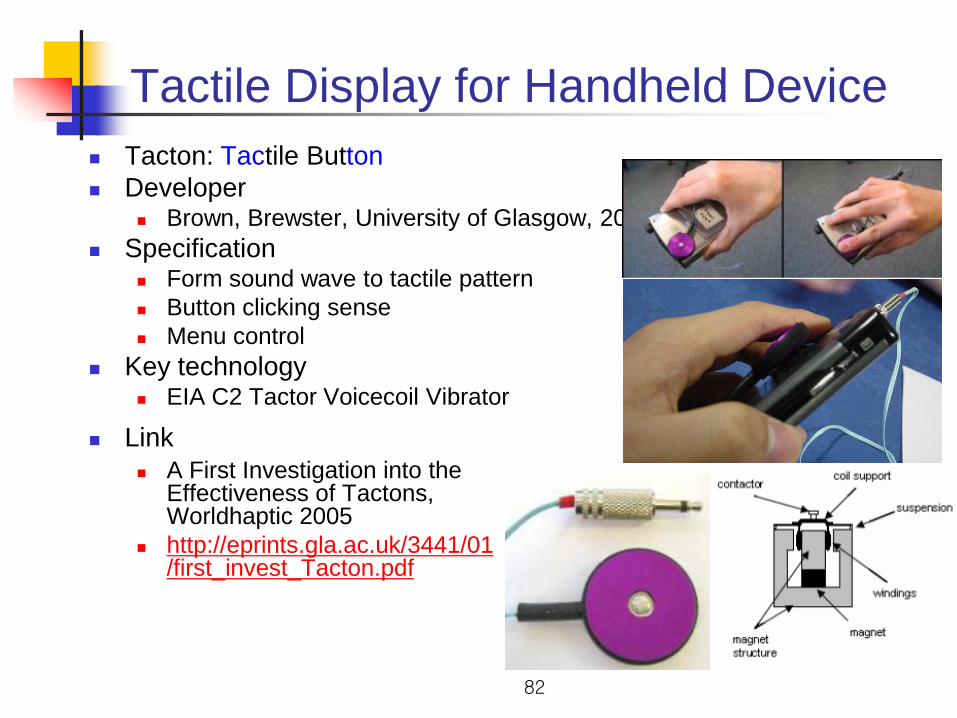
Tactile Display for Handheld Device
Tacton: Tactile Button
Developer Brown, Brewster, University of Glasgow, 2005
Specification Form sound wave to tactile pattern
Button clicking sense
Menu control
Key technology EIA C2 Tactor Voicecoil Vibrator
Link
A First Investigation into the Effectiveness of Tactons, Worldhaptic 2005
http://eprints.gla.ac.uk/3441/01/first_invest_Tacton.pdf

83
High Resolution Shear Display
STReSS
Developer Pasquero, Hayward,
McGill Univ.,2003~
Specification 10x10 array, 1mm spacing
Bandwidth 700Hz
±40V
100 switches
Maximum movement: 25μm
Key technology Piezoelectric Bimorph
Link STReSS: A Practical Tactile Display System with
One Millimeter Spatial Resolution and 700 Hz Refresh Rate, Eurohaptic 2003
http://www.cim.mcgill.ca/~haptic/
84
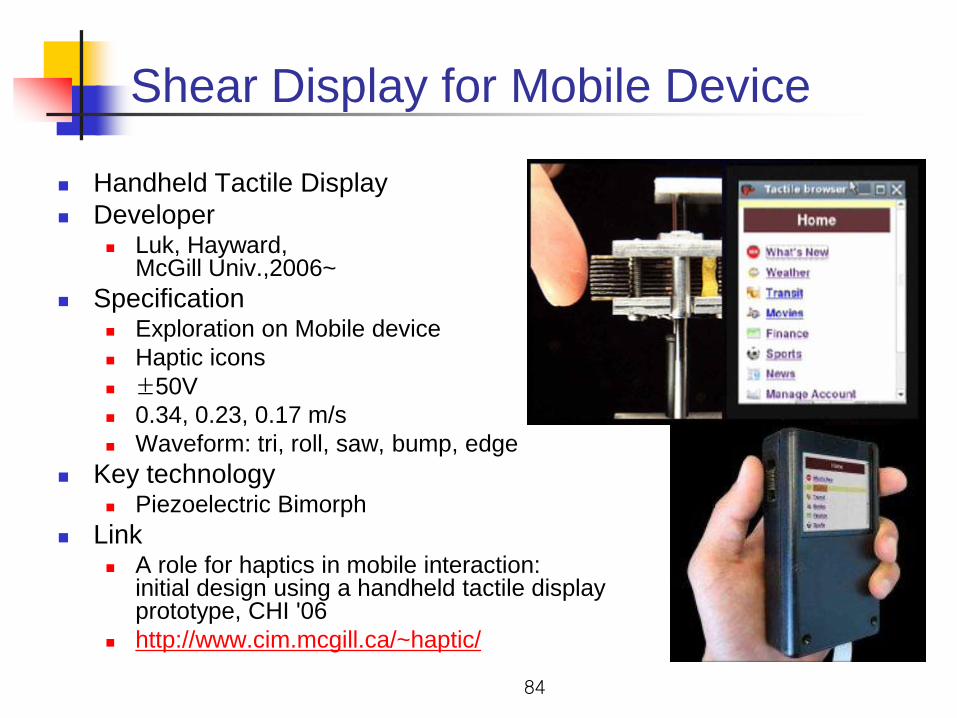
Shear Display for Mobile Device
Handheld Tactile Display
Developer Luk, Hayward,
McGill Univ.,2006~
Specification Exploration on Mobile device
Haptic icons
±50V
0.34, 0.23, 0.17 m/s
Waveform: tri, roll, saw, bump, edge
Key technology Piezoelectric Bimorph
Link A role for haptics in mobile interaction:
initial design using a handheld tactile display prototype, CHI '06
http://www.cim.mcgill.ca/~haptic/

85
Touch Feedback Screen The TouchSense System
Developer Immersion Corporation, 200x
Specification TouchSense actuators
Assembly of touchpanel and display
Integration KIT
Button click
Industrial applications
Key technology Solenoid actuators at corners
Link
http://www.immersion.com/industrial/docs/touchscreen_may06_V2-LR.pdf
http://www.immersion.com/industrial/docs/ts-integration-kit_apr07_V2lr.pdf
86
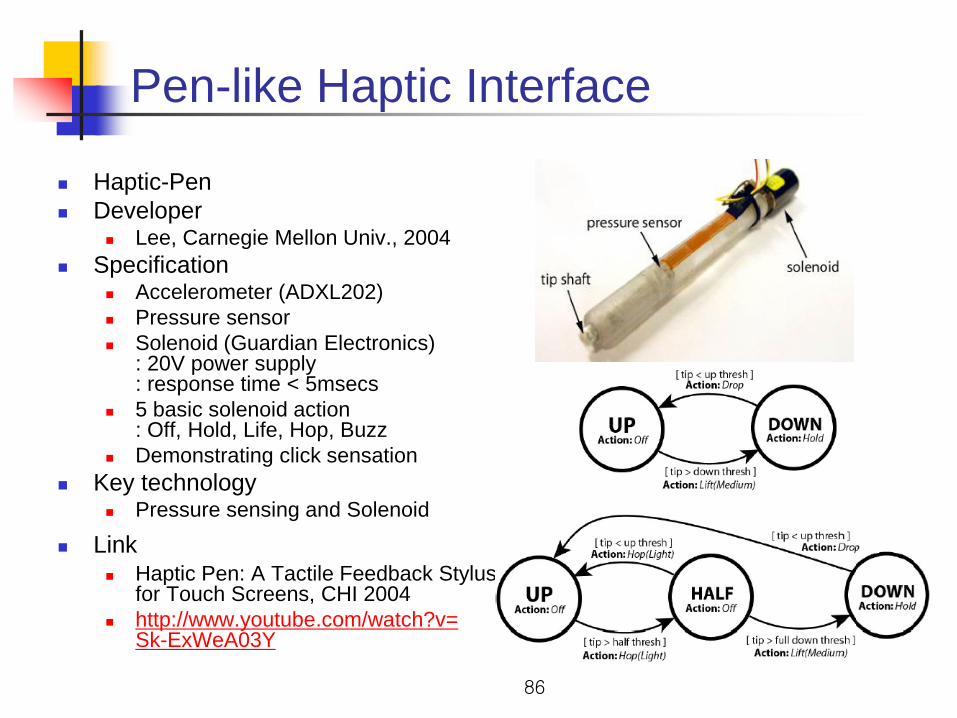
Pen-like Haptic Interface
Haptic-Pen
Developer Lee, Carnegie Mellon Univ., 2004
Specification Accelerometer (ADXL202)
Pressure sensor
Solenoid (Guardian Electronics): 20V power supply: response time < 5msecs
5 basic solenoid action: Off, Hold, Life, Hop, Buzz
Demonstrating click sensation
Key technology Pressure sensing and Solenoid
Link Haptic Pen: A Tactile Feedback Stylus
for Touch Screens, CHI 2004
http://www.youtube.com/watch?v=Sk-ExWeA03Y

87
Pen-like Multi-modal Interface
wUbi-Pen
Developer Kyung and Lee, ETRI, 2007
Specification 3x3 pin array, compact size controller
3 mm spacing, 1 mm displacement
Pattern, Braille display
Bandwidth: 20Hz
Windows haptic user interface
Haptic stylus interface on a touch screen: button, window/icon movement, hyperlink, scroll, menu, popup
Wireless communication
Sound feedback
Key technology Piezoelectric ultrasonic motor, Linear impact vibrator
Link http://www.zdnet.co.kr/webtv/digital/0,39034168,39163954,00.htm

88
wUbi-Pen: Internal Structure
WUbi-Pen Type I
Impulse, vibration, texture, Braille, sound feedback
Stand-alone, Wireless communication
WUbi-Pen Type II
Vibration, texture, sound feedback
Stand-alone, Wireless communication
Microphone
bluetoothmodule
battery
controller
speaker
microphone
Impulse generator
vibrator
vibrator

89
Haptic Feedback Windows Interface
Menu Pop-Up/Selection (F)
(T)
(E) (V)
(C)
(P)
(L)
(A)
Windows Size ControlETRIETRI
Scroll
ETRI Window
ETRI WindowETRI Window
Maximize/Minimize
Close
Move/Drag and Drop
Buttons
WUbi-Pen
Start
90
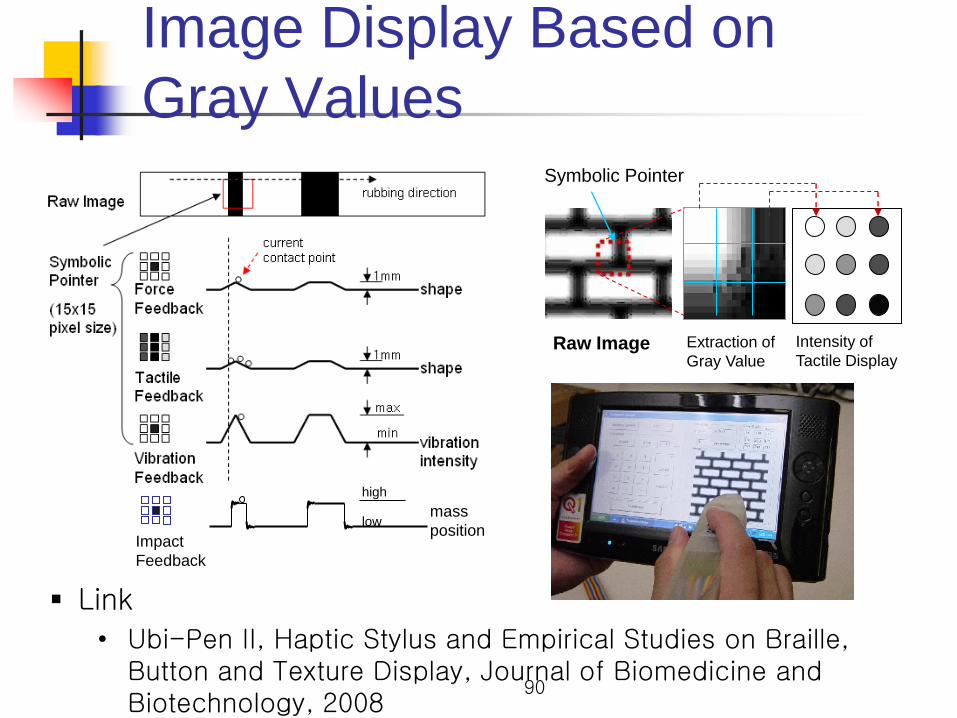
Image Display Based on
Gray ValuesSymbolic Pointer
Raw Image Extraction of
Gray Value
Intensity of
Tactile Display
Link
• Ubi-Pen II, Haptic Stylus and Empirical Studies on Braille, Button and Texture Display, Journal of Biomedicine and Biotechnology, 2008
Impact
Feedback
mass
position
high
low

iphone-haptics
Vibrotactile actuator
Tacton
Rotational motor

Touch-Feedback Touch Screen
Nokia
2 piezoelectric
sensor pads under
the screen
Realistic button
clicking
0.1 mm movement
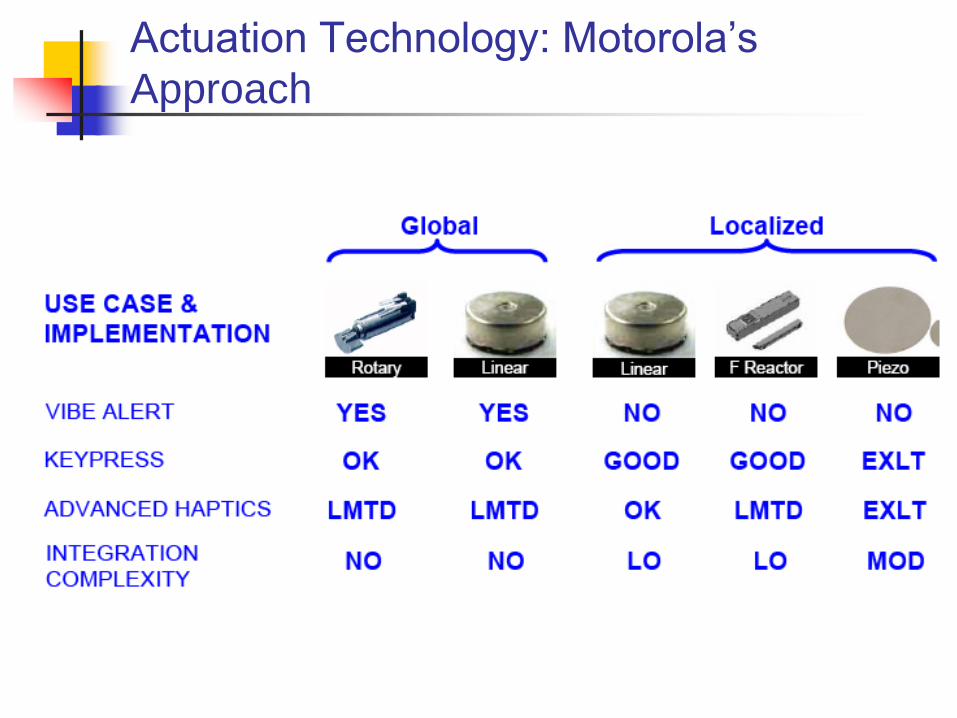
Actuation Technology: Motorola’s
Approach
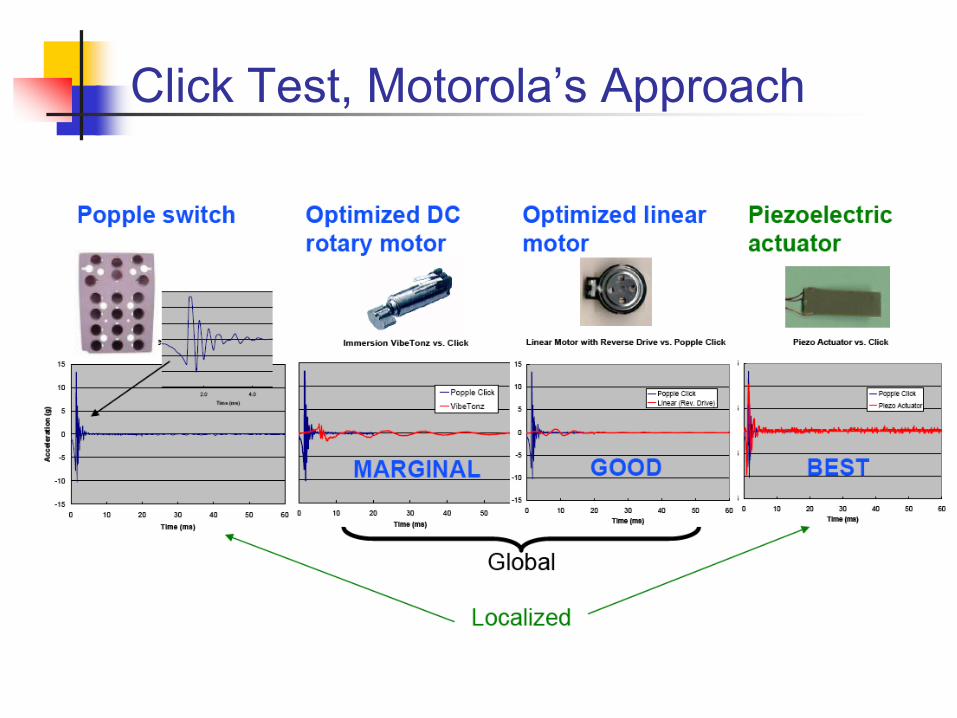
Click Test, Motorola’s Approach
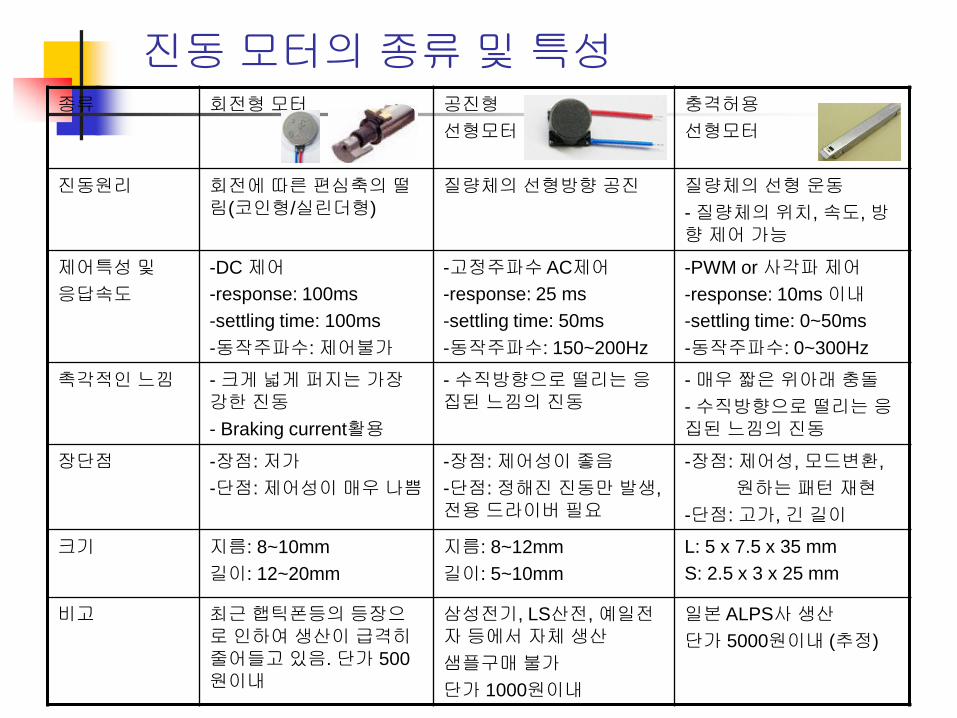
진동모터의종류 및특성종류 회전형모터 공진형
선형모터
충격허용
선형모터
진동원리 회전에따른편심축의떨림(코인형/실린더형)
질량체의선형방향공진 질량체의선형운동
- 질량체의위치, 속도, 방향제어 가능
제어특성및
응답속도
-DC 제어
-response: 100ms
-settling time: 100ms
-동작주파수: 제어불가
-고정주파수AC제어
-response: 25 ms
-settling time: 50ms
-동작주파수: 150~200Hz
-PWM or 사각파제어
-response: 10ms 이내
-settling time: 0~50ms
-동작주파수: 0~300Hz
촉각적인느낌 - 크게넓게퍼지는가장강한진동
- Braking current활용
- 수직방향으로떨리는응집된느낌의진동
- 매우짧은위아래충돌
- 수직방향으로떨리는응집된느낌의진동
장단점 -장점: 저가
-단점: 제어성이매우 나쁨
-장점: 제어성이좋음
-단점: 정해진진동만발생,
전용드라이버필요
-장점: 제어성, 모드변환,
원하는패턴재현
-단점: 고가, 긴길이
크기 지름: 8~10mm
길이: 12~20mm
지름: 8~12mm
길이: 5~10mm
L: 5 x 7.5 x 35 mm
S: 2.5 x 3 x 25 mm
비고 최근햅틱폰등의등장으로인하여생산이급격히줄어들고있음. 단가 500
원이내
삼성전기, LS산전, 예일전자등에서자체생산
샘플구매불가
단가 1000원이내
일본 ALPS사생산
단가 5000원이내 (추정)

ROKR E8’s Button

Multi-Function Transducer, Motorola’s
Approach

NOKIA’a Approach
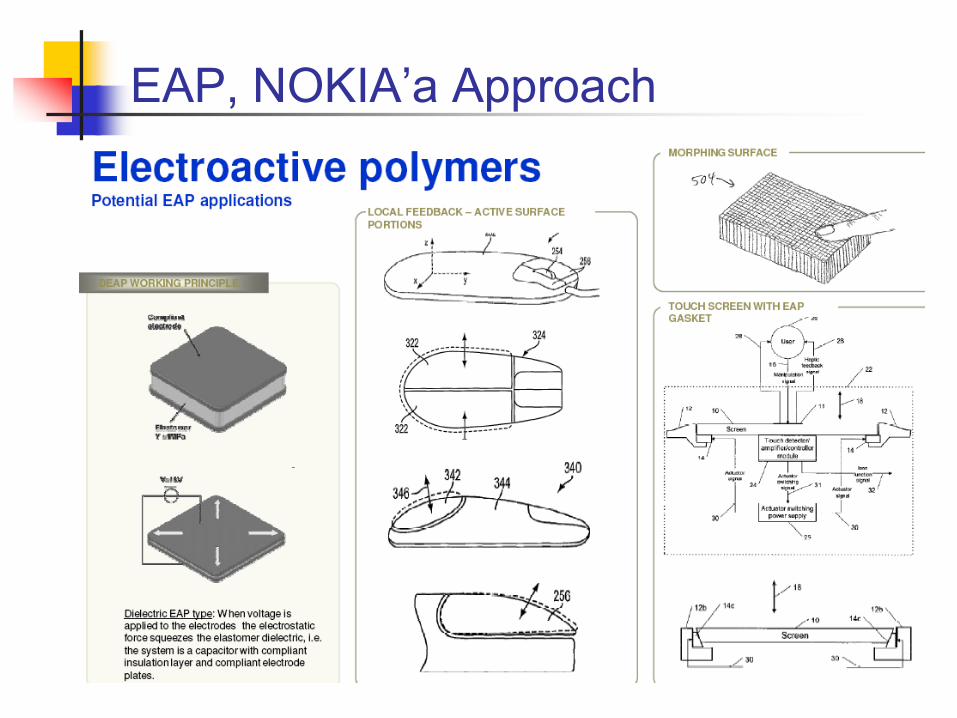
EAP, NOKIA’a Approach
100
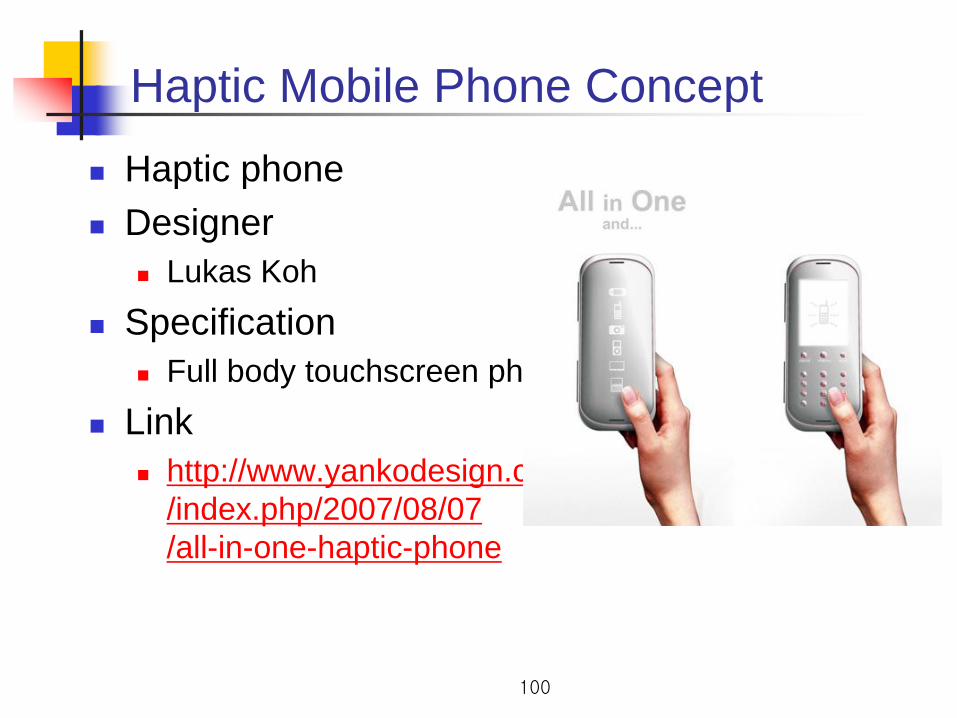
Haptic Mobile Phone Concept
Haptic phone
Designer
Lukas Koh
Specification
Full body touchscreen phone
Link
http://www.yankodesign.com
/index.php/2007/08/07
/all-in-one-haptic-phone

Nokia Haptikos (Patent)
Localized haptic feedback on a touch screen
Thin and transparent actuators
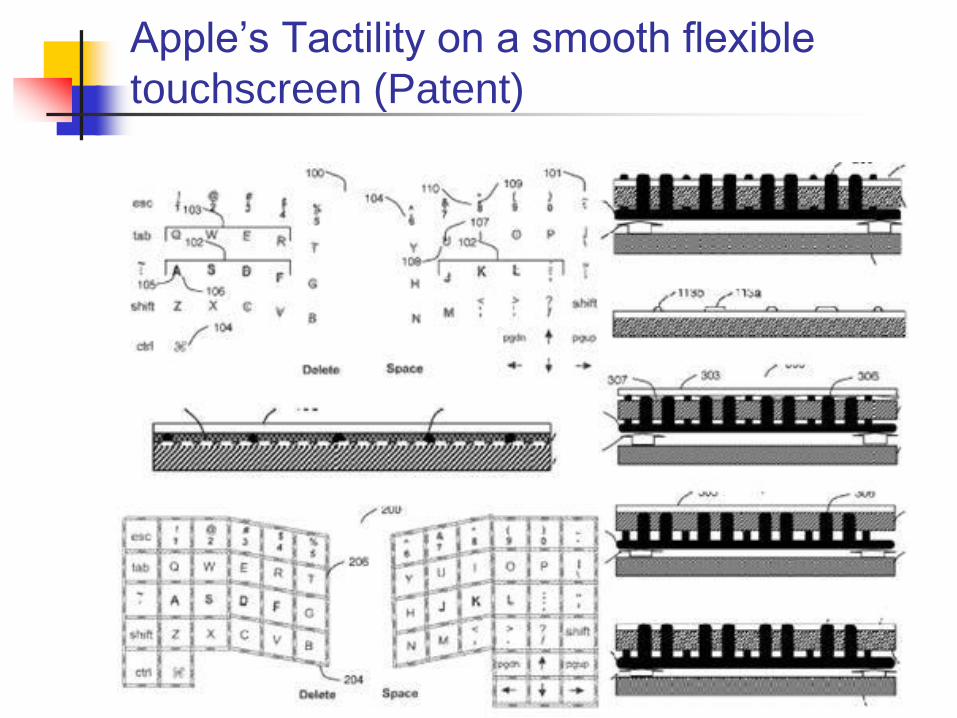
Apple’s Tactility on a smooth flexible
touchscreen (Patent)

103
Future of Tactile Display
Materials Light, compact, strong output power, low power
consuming, large displacement, fast response
Transformable
Applications Mobile communication device
Combination of tactile display and force display
Game, virtual reality, simulators
Digital book, edutainment, movies
Human interface for computers
On-line shopping