Synthetic Spectra of OB-Type Binary Stars A Tool to Test ...rih/downloads/msc_thesis.pdf · 1.1 The...
107
Synthetic Spectra of OB-Type Binary Stars A Tool to Test the Disentangling Technique Submitted for the degree of M.Sc. Astronomy University of Sussex July 1996 By Robert I. Hynes
Transcript of Synthetic Spectra of OB-Type Binary Stars A Tool to Test ...rih/downloads/msc_thesis.pdf · 1.1 The...

Synthetic Spectra of OB-Type Binary Stars
A Tool to Test the Disentangling Technique
Submitted for the degree of M.Sc. Astronomy
University of Sussex
July 1996
By Robert I. Hynes

1
Abstract
Synthetic spectra of six OB-type close binaries are constructed based on Kurucz (1991) model
atmospheres and realistic estimates of the signal-to-noise ratios to be expected using the
Danish 1.54m telescope at La Silla, Chile. These spectra are used to test the ability of the
disentangling technique to determine accurate system parameters. We find that for four of the
systems, masses within an accuracy of 1% should be attainable. Extensive use is made of the
option to estimate realistic errors from the scatter between multiple data sets differing only in
noise. We find that these errors may be significantly larger than those estimated by
examining the curvature of the residual surface. A variety of models of rectification errors are
tested. Provided such errors are kept within 2%, the effects on the disentangling analysis are
small enough to be ignored. Finally we examine the scale of distortion and proximity effects
and test one model for representing them in terms of a varying light ratio. We find that for
plausible variations, the effects on the deduced parameters are negligible. The suitability of
the disentangling technique for the determination of system parameters is considered. We
conclude that the technique does have some advantages over rivals such as cross-correlation,
but that more work is needed before it can be applied with confidence.

2
ContentsAbstract ......................................................................................................................................1
Contents......................................................................................................................................2
1. Introduction ............................................................................................................................4
1.1 The importance of binary systems....................................................................................4
1.2 The determination of stellar masses.................................................................................7
1.3 The need to study OB binaries .........................................................................................9
1.4 The difficulties of studying OB binaries........................................................................10
2. Techniques for analysing binary spectra..............................................................................13
2.1 Line shifts.......................................................................................................................13
2.2 Fourier cross-correlation ................................................................................................13
2.3 Tomography ...................................................................................................................15
2.4 Disentangling..................................................................................................................17
3. Properties of the stars ...........................................................................................................19
3.1 Magnitudes .....................................................................................................................19
3.2 Orbital parameters ..........................................................................................................21
3.3 Spectra............................................................................................................................22
4. The observing site and equipment........................................................................................26
4.1 Observing conditions at La Silla ....................................................................................26
4.2 The 1.54m Danish Telescope.........................................................................................27
4.3 Calibration with observed count rates............................................................................28
5. Producing the synthetic spectra............................................................................................29
5.1 Radial velocity shifts......................................................................................................30
5.2 Selection of phases.........................................................................................................33
5.3 Producing a composite spectrum....................................................................................37
5.4 Noise...............................................................................................................................37
5.5 Sample results ................................................................................................................43

3
6. Disentangling the spectra to determine system parameters .................................................44
6.1 The approach to disentangling .......................................................................................44
6.2 Optimisation of system parameters ................................................................................45
6.3 Estimating errors ............................................................................................................49
7. Preliminary results................................................................................................................51
7.1 Expected errors...............................................................................................................51
7.2 Exposure time needed ....................................................................................................55
7.3 The number of spectra needed .......................................................................................56
7.4 Optimum phase distribution ...........................................................................................58
8. Rectification of the spectra...................................................................................................59
8.1 Local rectification errors ................................................................................................59
8.2 Large scale rectification errors.......................................................................................61
8.3 Disentangling the orders separately ...............................................................................63
9. Effects of distortion and proximity ......................................................................................68
9.1 Preliminary estimates .....................................................................................................69
9.2 Variations in luminosity ratio.........................................................................................72
9.3 Spectral variations..........................................................................................................78
10. Discussion and conclusions................................................................................................79
Acknowledgements ..................................................................................................................82
Appendix I: Response curves for the DFOSC instrumentation ...............................................83
Appendix II: Noise-free, synthetic spectra of the components ................................................86
(a) Overall views ..................................................................................................................86
(b) Detailed spectrum of GL Car A......................................................................................92
Appendix III: Radial velocity and light curves........................................................................94
Appendix IV: Roche lobe filling of the stars .........................................................................100
References ..............................................................................................................................103

4
1. Introduction
1.1 The importance of binary systems
Binary stars are of importance to astronomers for many reasons. Historically, they have
provided evidence that our understanding of Newtonian mechanics and gravity is valid
beyond the solar system and today apsidal motion in binary systems is being used to test the
validity of the successor to Newton’s theory; general relativity. Their mere existence and
abundance provides constraints on theories of star formation, as any valid theory must
explain how binary, and multiple, stars can form. In their later stages of evolution interacting
binaries provide a valuable laboratory in which to study white dwarfs, neutron stars and
possibly black holes. An exciting possibility that is just emerging is that it may be possible to
use OB binaries as distance indicators to Local Group galaxies (Giménez et al., 1994).
Perhaps most significantly for our understanding of stars, binary systems present the only
direct way to measure the mass of stars, and the best way to obtain their radii. They can be
classified according to several schemes. For our purposes, the most useful is to consider how
they reveal their binary nature.
The earliest type of binary stars to be positively identified as such were visual binaries;
systems where both components are visible and resolved. Periods are typically from decades
to centuries, so it is often possible to trace out their orbits around each other. This reveals
valuable information such as the inclination and eccentricity of the system. Given absolute,
rather than just relative, positions then the ratio of orbital semi-major axes, and hence the
mass ratio, can be determined. Periods can usually be measured, or at least estimated if they
are too long to observe in full. Unless we know the distance to the system, however, we
cannot find the scale of the orbit, and so the absolute masses of the components remain
unknown.

5
For some binaries, we see the orbit almost exactly edge-on. It is then possible to see eclipses
of one star by the other. This shows up as periodic dips in the brightness of the system; the
light curve. The timing of these eclipses provides the most accurate way to measure the
period of a binary. Furthermore, by study of the relative timing of primary and secondary
eclipses, together with their durations, depths and shapes, it is possible to determine some or
all of the following information.
a) The inclination of the orbital plane to the line of sight.
b) e cos ω - a combination of the eccentricity of the orbit, e, and the longitude of
periastron, ω. The latter is defined in §5.1; it specifies the direction of the line of
centres of the stars at periastron (closest approach). Some close binaries exhibit what
is termed apsidal motion - a slow change of ω over time. For example, the eccentric
binary GL Car has an apsidal motion period of 25.22 years (Giménez and Clausen,
1986) corresponding to ω increasing by 14.3° per year. This effect arises because the
stars are neither point masses, nor perfectly spherical and hence the potential in
which they move is not strictly Keplerian, leading to orbits that do not close.
Analysis of apsidal motion can yield e sin ω, allowing us to solve for e and ω
individually.
c) The radii of the two stars as fractions of their separation.
d) The ratio of the temperatures of the stars. Individual temperatures may be deduced
from multicolour photometry and/or spectroscopy.
e) Limb darkening can be measured for systems showing total or very deep eclipses.
The one thing that is absent is an absolute scale; we cannot determine the separation,
absolute radii or velocities only from the light curve, and hence we cannot find the masses.

6
Most binaries are too close to resolve their components separately and are not inclined edge-
on; instead we must seek information in their spectra. We see that for some stars, many
spectral lines are in fact doubles, with two components moving back and forward over time.
This occurs because the star is an unresolved binary; a spectroscopic binary. The stars are
orbiting about each other and so except for the rare case where we are viewing the orbit face
on, the stars will have some time-dependant component of motion along the line of sight.
This leads to time-dependent Doppler shifts of the spectral lines, giving the observed
spectrum. Such systems in which we see two sets of lines are known as double-lined
spectroscopic binaries. There are also single-lined spectroscopic binaries in which we only
see a single set of lines, but this is moving back and forward just like a single component of a
double-lined spectrum. In this case, we deduce that the system is a binary in which one
component is too faint to contribute noticeably to the spectrum; it is detected only by its
effect on the motion of the companion. For spectroscopic binaries it is possible to measure
the orbital velocities from the observed Doppler shifts, and by plotting a radial velocity curve
we can, in principle, also obtain the eccentricity and orientation of the orbit. These together
with the period of the system allow us to set lower limits on the masses of the components.
The only problem remaining is that we do not know the inclination of the orbit; this cannot
be determined from velocity measurements alone. Thus, if we see small radial velocities, we
do not know whether this is because the masses are really quite small, or whether we are
seeing the system face on so that the radial velocity is only a small component of the overall
motion.
It should be clear that to determine full system parameters is impossible for a system which
only fits into one of these groups; we require information of at least two types to complete
our knowledge. In this respect, visual binaries are of little value. Because of their large
separations, it becomes very unlikely that we will observe an eclipse, and because of their
long periods, orbital velocities are small, if not undetectable. Furthermore, large

7
uncertainties in distance for most systems limits severely the quality of masses obtained in
this way. In contrast, binaries which are both spectroscopic and eclipsing are, if not
common, at least relatively abundant. This is aided by the fact that to see eclipses, we must
observe at high inclination, enabling us to also see maximum radial velocities. Such binaries
do enable us to deduce full system parameters, and most crucially, the masses and radii of the
two components
Finally, if the information obtained from a binary system is to be of relevance to the study of
isolated stars, it is also clear that we need to study binaries whose components behave as if
they were isolated. This is only the case for detached systems which have not in the past
undergone a mass transfer phase.
To conclude, to determine masses and radii that can be used to test models of the evolution of
isolated stars we require detached, double-lined, eclipsing binaries. This is the conclusion of
Anderson (1991a) who takes as a necessary objective masses and radii of accuracy ~1-2%.
Data with uncertainty of 5% or greater yields few useful constraints on theoretical models.
Conversely, data of better than 1% accuracy are unnecessary as uncertainties in other
parameters, such as metal abundances then dominate. Given such data, how can it be used?
Among some of the possibilities are the testing of models of main-sequence evolution,
examining the effects of varying chemical composition and the testing of opacity tables and
models of convection. Accurate study of binary stars is thus crucial to our further
understanding of the structure and evolution of stars, which in turn make up most of the
visible mass of the universe.
1.2 The determination of stellar masses
Let us now briefly examine how we can determine masses from the observed data. We
assume that the photometric observations have enabled us to determine an accurate

8
ephemeris for the system; a time corresponding to a known orbital phase (typically primary
eclipse), T, together with the period, P. This then allows us to assign a phase to any
observation at a known time. From the light curve we also obtain the inclination, i. The
eccentricity, e, is either taken to be zero (if the orbit is known to be circular) or is measured
using information from the light curve and apsidal motion studies. We further assume that
suitable spectroscopic analysis has been done, utilising the photometric data, to yield the
velocity semi-amplitudes, K1 and K2. Ways to achieve this are discussed in §2.
Our approach draws on Heintz (1978) and Böhm-Vitense (1989). We take as our starting
point, Kepler’s 3rd Law, together with expressions for K for an elliptical orbit, and
relationship between the mass and velocity ratios,
( )M M
a a
P G1 2
1 2
3
2
24+ =
+ π, (1-1)
( )K
a i
P ei
i=−
2
1 21
2
π sin(1-2)
andM
M
K
K2
1
1
2
= (1-3)
We then rearrange (1-2) and eliminate a1,2 from (1-1),
( ) ( )M M
K K P e
G i1 2
1 2
3 23
2
3
1
2+ =
+ −π sin
(1-4)
Using relation (1-3) now allows us to eliminate either M1 or M2. We thus obtain,
( ) ( )M
K K K P e
G i1
2 1 2
2 23
2
3
1
2=
+ −π sin
(1-5)
We have thus obtained an expression for M1 in terms of observed or fundamental quantities.
A similar expression exists for M2. If P is measured in days, M in Msun and K1 and K2 in
kms-1 then,

9
( ) ( )M
K K K P e
i17 2 1 2
2 23
2
31036 101
= ×+ −−.
sin
and( ) ( )
MK K K P e
i27 1 1 2
2 23
2
31036 101
= ×+ −−.
sin(1-6)
We now proceed to consider how errors propagate through these formulae; we will need
these results in §7.1 to determine the errors in mass expected, given estimated errors in K1
and K2. We first calculate the fractional error on K1+K2, as follows,
σ σ σ1 2
1 2
2
1
1 2
2
2
1 2
2
+
+
=
+
+
+
K K K K K K(1-7)
We then deduce the fractional error on M1 and M2,
( )σ σ σM
M K K K1
1
2
2
2
2
1 2
1 2
2
4
=
+
+
+
and( )σ σ σM
M K K K2
2
2
1
1
2
1 2
1 2
2
4
=
+
+
+ (1-8)
This assumes, of course, that the uncertainty in P, e and i can be neglected. P will be well
known and both 1-e2 and sin3i are typically close enough to unity to be only weakly
dependant on e and i.
1.3 The need to study OB binaries
The study of eclipsing, spectroscopic binaries has made considerable progress in the last two
decades, with key advances including the introduction of CCD’s and the development of
cross-correlation analysis. The result is that for most areas of the H-R diagram we now have
a sizeable body of accurate parameters, including masses and radii, with which to constrain
stellar theories. The current position of research in this area is well reviewed by Anderson
(1991a,b). There remain a few areas for which data is much less satisfactory. One such area
is the hottest end of the Hertzsprung Russell diagram; O and early B type stars.

10
Popper’s review (1980) lists twenty systems of type B5 or earlier, including detached, semi-
detached and probable contact systems. He concludes, however, that for only four of these
can we be confident that the masses obtained are accurate even to within 15%. In response to
this poor state of affairs, Hilditch and Bell (1987) sought to extend the body of available data.
They list thirty-one systems (including all of Popper’s twenty), of which sixteen are
detached. Typical standard errors on the masses are 10%. Of these only eight, together with
the system EM Car are judged by Anderson (1991a) to be of sufficient accuracy (see §1.1) to
be included in his review.
Extending the sample of OB stars with accurate masses and radii is thus a very worthwhile
observational objective and one that can be expected to yield valuable input to the
understanding of hot stars.
1.4 The difficulties of studying OB binaries
Let us now ask “why is it so difficult to obtain accurate masses for early-type binaries?”
Clearly one important reason is their relative paucity; early-type stars are intrinsically rare,
lying at the extreme end of the stellar distribution function. There are difficulties beyond
this, however, which are inherent in the spectra of these stars.
The O and early B-type stars listed by Hilditch and Bell (1987) range in temperature from
~15,000 K (DI Her B, B5) to ~38,000 K (V382 Cyg A, O7.3). Within this range of
temperatures the dominant lines are the hydrogen Balmer lines and the diffuse helium lines at
4026 Å and 4471 Å; other lines are present, but weak. These lines, however, are strongly
Stark broadened, giving extended wings that often overlap with adjacent lines. The sample
spectra in Appendix II illustrate this problem. It arises because the electric fields of passing
ions can significantly perturb, and hence broaden, the energy levels of hydrogen and helium

11
atoms. The weaker lines, while narrower intrinsically, are broadened by the high rotational
velocities commonly encountered in early-type stars, making them so dilute that they are
easily lost in noise.
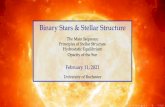
Hγ (4340)
He I (4387)
He I (4471)
Fig. 1.1 A section of a synthetic spectrum of the B1 V binary DW Car, near quadrature (i.e.maximum relative radial velocities.
As a consequence, line blending is a major problem in these spectra. This takes several
forms. (See Anderson, 1991a for discussion; 1991b gives more detail.) Firstly there may be
significant blending of two lines within the spectrum of a single star. This effect, whilst
undesirable, is not a major problem, as it does not dependent on phase; the spectrum of each
component is fixed. More of a problem, however, is blending between the component
spectra, either of the same line if its width is larger than the separation of the two
components, or of two different lines which happen to be shifted into the same vicinity. This
is illustrated amply by Popper (1981) who collects microphotometer tracings of spectra of 26
OB-type binaries most of which show blending. In fig. 1.1 we show a region of a synthetic
spectrum of DW Car (B1 V), at a phase near maximum relative velocity. We see that the Hγ
Balmer line and the diffuse Helium line at 4471 Å both show serious blending between the

12
components. The weaker Helium line at 4387 Å shows minimal blending, but even for this
line, the problem is not completely absent. At phases of smaller relative velocities, the
problem will clearly be more serious. As Anderson discusses, and as is taken up more fully
in §2, this can lead to substantial systematic errors in parameters determined using heavily
blended lines. Only with the appearance of higher quality spectra allowing measurements of
the much weaker unblended lines, and with the development of more sophisticated data
analysis techniques such as cross-correlation and disentangling are these difficulties
beginning to be overcome.

13
2. Techniques for analysing binary spectra
We now consider the techniques that can be used to extract information from the spectra of
OB-type binaries.
2.1 Line shifts
Historically, radial velocity measurements have been made from photographic films or plates
by measuring the displacements of individual spectral lines. This could be done visually or
by oscilloscopic scanning. Either way, however, the problem of line blending, as discussed
in §1.4, leads to severe underestimates in most measurements made in this way. Anderson
(1991a,b) concludes that a reasonable estimate of the systematic error in masses is 30-35%
for measurements based on the hydrogen lines and 10% if the diffuse helium lines are used.
While these errors can be avoided by using unblended lines (the narrow helium lines, or
metallic lines), due to the high rotational velocities involved, these lines tend to be washed
out, so the results then suffer more from noise.
2.2 Fourier cross-correlation
Fourier cross-correlation is a more sophisticated way of analysing digitised spectra. The
technique was introduced by Simkin (1974); and further developed by Tonry and Davis
(1979). We here outline the important characteristics of the technique qualitatively. We take
some estimate of what the unshifted stellar spectrum is, the template, and then shift this to
give a best fit to the observed spectrum. This may be done over a large area of the spectrum,
or just a single line. The template may use theoretical line profiles, but is more commonly a
real spectrum of a single star.
The analysis yields a cross-correlation function, the c.c.f.. This measures the correlation
between the observed and template spectra as a function of shift in logarithmic wavelength
(i.e. component velocity). For a single-lined binary, this will be a single-peaked function. It

14
is generally not a simple function, and whilst the centre resembles a Gaussian, the wings
show significant structure, including prominent side-lobes (secondary maxima). A double-
lined binary will give a double-peaked c.c.f., with the two peaks arising from the velocities of
the two components. In this case, the two peaks will not be exactly at the velocities of the
components; the double-peaked c.c.f. can be thought of as a blend of two single-peaked
c.c.f.s. It is then necessary to assume a form for the individual c.c.f.s, e.g. Gaussian, in order
to resolve the overall c.c.f. into components and determine the correct component velocities.
Difficulties arise because, as noted, the c.c.f. is not a Gaussian and so we are, to some extent,
fitting dissimilar functions. It is found for spectra showing significant blending (Anderson,
1991b) that when only a narrow spectral range is used, interference between the side lobes
can lead to systematic errors. Popper and Hill (1991) construct synthetic binary spectra from
photographic spectra of isolated OB stars and find that conventional cross-correlation
analysis leads to average overestimates of the velocity semi-amplitudes by 2% for the
primary component and 3% for the secondary. Hill and Holmgren (1995) avoid these
problems by careful consideration of the form of the c.c.f.; they cross-correlate the spectrum
of the isolated star 10 Lac with a rotationally broadened (~150 kms-1) version of itself to
obtain a realistic individual c.c.f. which can then be used to measure the binary c.c.f. instead
of a Gaussian.
An extension of the technique is two-dimensional cross-correlation (Zucker and Mazeh,
1994). This is an obvious development, but one which required excessive computation time
until Zucker and Mazeh were able to develop an algorithm to greatly reduce this time and
render the technique useable. Instead of just defining one template spectrum, we now
provide two - one for each star. This has the immediate advantage of providing a much better
model for pairs of dissimilar stars. We then calculate the correlation between the observed
spectrum and a composite of the two templates for a range of wavelength shifts of both

15
templates. Since we now have two wavelength shifts to optimise, the c.c.f. defines a surface
and the maximum of the surface tells us the velocities of the two components. The chief
advantage of the method is that the c.c.f. is now single-peaked, so we completely bypass
problems caused by the two components of a one-dimensional c.c.f. blending into one
another. This should avoid the problems of systematic errors and also allows us to measure
accurate velocities even for phases when the relative velocity of the stars is so small that the
one-dimensional c.c.f. is unresolved.
In conclusion, cross-correlation is a powerful and versatile technique, and can be applied to
both single-line and double-line spectroscopic binaries. It has also been used to determine
galactic redshifts (e.g. Tonry and Davis, 1979). The method can be susceptible to systematic
errors, but several recent developments allow these problems to be avoided.
2.3 Tomography
Primary spectrum
Secondary spectrum
Fig. 2.1 Representing the combining of two component spectra in tomographic terms.
We now take a brief historical digression to consider another technique used for spectral
analysis which does not yield the radial velocities. Instead, tomography is used to reconstruct
the component spectra from a set of composite spectra. Bagnuolo and Gies (1991) discuss

16
the method and illustrate its application to the O-type binary AO Cas. In general terms,
tomography involves seeking to reconstruct an object in depth from a number of views of the
object. We can, however, think of separating a binary star spectrum in the same way. The
analogy is illustrated in fig. 2.1. The composite spectrum consists of contributions from the
two component spectra, shifted according to radial velocity. We can imagine laying the two
spectra one behind the other, as shown. Any combination of radial velocities of the stars can
then be represented by looking at the two component spectra from a particular angle; the
angle depending on their relative radial velocities, and hence their phase. A set of spectra of
different phases can thus be thought of as a set of views of the two component spectra from
different angles. We need to know the radial velocities (possibly from cross-correlation
analysis) in order to map phases to angles. Obtaining the two separate components is then a
straightforward tomographic problem.
The solution is typically by an iterative least squares method. We assume an initial form for
the component spectra, together with a luminosity ratio. This allows us to predict what the
observed spectra should look like. Comparing the observed spectra with the predictions then
allows us to apply corrections to the component spectra and refine them iteratively, until,
hopefully, convergence is reached.
The technique does have difficulties. Care has to be taken in implementing the algorithm in a
way which ensures that it does in fact converge to a solution rather than oscillating.
Difficulties also arise because in regions of the spectrum where there are strong spectral
lines, the luminosity ratio is poorly defined and varies rapidly. This leads to disruption of the
secondary spectrum in the vicinity of strong lines in the primary (Maxted et al., 1994).
It has been suggested by Zucker and Mazeh (1994) that tomography could profitably be
combined with two-dimensional cross-correlation. We begin by taking best estimate

17
template spectra for the two components and perform a two-dimensional cross-correlation to
obtain a first approximation to the radial velocities for each observed spectrum. We then
perform a tomographic analysis using these radial velocities together with our templates as
first approximations to the component spectra. This allows us to improve our templates,
which can then be used for a more accurate cross-correlation analysis. The process is iterated
until the results (hopefully) converge.
2.4 Disentangling
Disentangling grew out of work on tomography. The technique was first demonstrated by
Simon and Sturm (1994) who applied it to the early B-type binary, V453 Cygni. It has
subsequently also been used on the O-type systems, DH Cephei (Sturm and Simon, 1994) and
Y Cygni (Simon et al., 1994) and the F-type system, DM Vir (Maxted, 1996a). It is clear
from this brief list that the technique is still in its early stages, and remains to be tested fully,
both on synthetic spectra and by comparison with previous studies of the same stars.
While the application of the technique is a complex problem, the essential ideas are very
straightforward, and similar in some respects to tomography. We can think of each observed
spectrum as being a linear combination of the spectra of the two components, shifted
according to their radial velocities. This can be represented in matrix form. We form the
column vector, x, by concatenating the two component spectra, xA and xB, and the column
vector, b, by concatenation of the observed spectra, b1, b2,…, bn. Then we represent the
transformation that maps x onto b by a matrix M .
b
b
b
N N
N N
N N
x
x
1
2
1 1
2 2
� � �
n
A B
A B
A n B n
A
B
=
, ,
, ,
, ,
(2-1)
Then each submatrix, NA,i determines how the elements of the spectrum of star A contribute
to the observed spectrum bi and similarly for NB,i. It will be clear that the matrix M will be

18
very large. For example if we have twenty 3000 pixel spectra, and represent the component
spectra with the same resolution, we would expect a 60,000 column, 6000 row matrix, albeit
a very sparse one, as each element of the observed spectrum will only receive a contribution
from one part of each component spectrum. Nonetheless, there does exist, in principle, an
inverse matrix which will map the observed spectra into two, separated component spectra.
Disentangling determines this matrix.
The original motivation for using the technique was that the resulting component spectra are
ideally suited to quantitative analysis and calibration of stellar models in a way which is not
possible using the unseparated, blended spectra. In addition, however, since the principal
factors determining the elements of M are the orbital parameters of the binary, a best fit
solution for the inverse matrix will yield these parameters rather precisely. In particular, as
found by Simon and Sturm (1994) and confirmed by our results discussed later, there appears
to be no need for any systematic corrections of the type discussed by Popper and Hill (1991).
Disentangling thus emerges as a strong competitor to cross-correlation analysis, with clear
advantages over it for heavily blended spectra for which cross-correlation is susceptible to
systematic errors.
In this work, in line with Popper and Hill’s suggestion (1991), we test the disentangling
technique by constructing and then analysing synthetic binary spectra.

19
3. Properties of the stars
The synthetic spectra were produced to reproduce observations made by Dr. P.F.L. Maxted at
La Silla, Chile. Six stars were; all are close, early B-type eclipsing binaries in the southern
sky. They are listed in table 3.1.
HD number Right ascension (2000.0) Declination (2000.0)DW Carinae 305543 10h 41m 15s -59° 46.4’GL Carinae 306168 11h 14m 14.2s -60° 39’ 34”LZ Centauri 102893 11h 50m 32.46s -60° 47’ 37.1”V346 Centauri 101837 11h 42m 50.4s -62° 26’ 01”AC Velantis 93468 10h 46m 18.4s -56° 49’ 45.4”NSV 5783 109724 12h 37m 16.76s -56° 47’ 16.6”
Table 3.1: The stars to be studied
3.1 Magnitudes
To estimate signal-to-noise ratios, we would like a homogeneous set of UBV magnitudes for
these stars. Such data is not available, so it was necessary to use a variety of sources,
together with some extrapolation.
3.1.1 Observed data
The General Catalogue of Variable Stars (Kholopov et al., 1985) and Smithsonian
Astrophysical Observatory Star Catalogue (Whipple et al., 1966) were used as a starting
point. Where more precise data were available, UBV photometry especially, these were
preferred, although they are not guaranteed to be more accurate. All the data that was
available, together with the adopted spectral type and luminosity class, are listed in table 3.2.
The latter were taken, in the absence of other information, from the Simbad database
operated at CDS, Strasbourg. They are generally uncertain to within at least ±1
classification.
3.1.2 Colour correction
For those stars for which UBV photometry was available (GL Car, V346 Cen, NSV 5783),
(B-V) and (U-B) values as given were used to deduce the U and B magnitudes listed. For the

20
other stars, only a V or even photographic magnitude (approximately equivalent to the B
band) was available. For these tabulated intrinsic (B-V)0 and (U-B)0 colour indices
(Deutschman et al., 1976) for the estimated spectral type and luminosity class were used.
These were then corrected for interstellar absorption as follows.
Measuredmagnitudes
Measuredcolours (UBV)
Spectral type &luminosity class
Source
DW Car mpg = 9.60B1 V
Kholopov et al. (1985)Maxted (1995)
GL Car B = 9.73V = 9.81 (B-V)= +0.17
(U-B)= -0.73B3 V
Kholopov et al. (1985)Nicolet (1978)
Simbad (1995)LZ Cen V = 8.10
V = 8.09 B1 IIIKolopov et al. (1985)Vaz et al. (1995)
V346 Cen B = 8.48V = 8.55 (B-V)= -0.03
(U-B)= -0.81B1 V
Kholopov et al. (1985)Nicolet (1978)
Giménez et al. (1986)AC Vel V = 8.60
V = 8.88B3 IV
Kholopov et al. (1985)Wolf and Kern (1983)Simbad (1995)
NSV 5783 mpg = 8.50mpv = 8.70
V = 8.67 (B-V)= -0.02(U-B)= -0.50
B5 V
Whipple et al. (1966)
Deutschmann et al. (1976)
Simbad (1995)
Table 3.2: Observed properties of stars
Firstly a comparison was made between the observed and predicted magnitudes for those
systems which have been studied in the Johnson system. The tacit assumption was made that
since the systems being considered are all of comparable apparent magnitude and luminosity,
they will experience comparable reddening. Whilst this is may be a poor assumption, the
effects of reddening are small, and so its consequences are minimal. It was found that for the
three systems that have been studied, on average,
∆(B-V) ~ 0.27, ∆(U-B) ~ 0.08. This is in poor agreement with the expected reddening
relation:
∆∆
( )
( ).
U B
B V−−
≈ 0 7 2 (3-1)

21
It was decided, however, to follow the empirical data that was known, given insufficient data
for a more thorough treatment. The resulting above atmosphere magnitudes are listed in table
3.3.
Aboveatmosphere
Belowatmosphere
U B V U B VDW Car 8.73 9.60 9.61 9.26 9.83 9.74GL Car 9.25 9.98 9.81 9.78 10.21 9.94LZ Cen 7.20 8.09 8.09 7.73 8.32 8.22V346 Cen 7.71 8.52 8.55 8.24 8.75 8.68AC Vel 8.28 8.93 8.88 8.81 9.16 9.01NSV 5783 8.15 8.65 8.67 8.68 8.88 8.80
Table 3.3: UBV magnitudes of stars above and belowthe atmosphere.
3.1.3 Atmospheric extinction
The observations were carried out at the European Southern Observatory, described in §4.1.
The atmospheric extinctions listed there for a zenith angle of 30° were applied to obtain the
final, below atmosphere magnitudes also listed in table 3.3. These are the magnitudes that
were used in determining the expected signal-to-noise ratios in §5.4.2.
3.1.4 Uncertainties in the magnitudes
These UBV magnitudes have had to be patched together from a variety of measurements of
variable accuracy, with corrections based on uncertain assumptions. An error of 0.2 in a
magnitude will lead to a corresponding error of 20% in the predicted number of photon
counts and hence 10% in the signal-to-noise ratio; see §5.4.1. It is likely that other
uncertainties, such as those in instrumental properties will be as large, or larger, than this.
3.2 Orbital parameters
In order to combine the spectra it is necessary to be able to calculate a radial velocity curve
for each system. To do this, several orbital parameters are needed; these are the velocity
semi-amplitudes, K1 and K2, the orbital eccentricity, e and the longitude of periastron, ω.
Most of these are known and straightforward. The longitude of periastron required

22
modification for GL Car, as this system has a short apsidal motion period of 25.22 years
(Giménez and Clausen, 1986). Thus their value of ω0=66.1° ± 0.3 (HJD 2 442 070.27830 ±
0.00026) had to be updated by nearly a full apsidal motion period. Note that to combine the
spectra, we do not need to use the period as all spectra are specified in terms of phase. Also,
systemic velocity, γ, is not necessary as the disentangling procedure is completely
independent of an overall shift in velocity. The parameters used are listed in table 3.4.
It was decided that for convenience, phases would not be specified relative to the primary
minimum of the light curve, the convention for eclipsing binary studies. Instead, they would
be measured from periastron, a much more natural system for the calculation of radial
velocities. For systems with circular orbits, ω was taken to be zero, and so the reference
point becomes the ascending node. The difference, ∆φ, to be subtracted from to our phases
to convert them to the conventional notation is also tabulated in table 3.4.
K 1
(kms-1)K 2
(kms-1)e ω(°) ∆φ
DW Car 262.3 278.0 0.0000 0.0 0.250GL Car 235.0 245.0 0.1457 21.8 0.148LZ Cen 223.0 205.0 0.0000 0.0 0.250V346 Cen 135.0 190.0 0.2880 345.0 0.199AC Vel 145.1 145.8 0.0000 0.0 0.250NSV 5783 100.0 110.0 0.1880 345.0 0.232
Table 3.4: Orbital parameters
3.3 Spectra
Synthetic spectra for the individual components were generated by a two stage process.
Firstly, Kurucz model atmosphere spectra (Kurucz, 1991) based on a grid of values of log g
and Teff, listed in table 3.5, were provided by Dr. C.S. Jeffery of the University of St.
Andrews. These spectra cover the range 3600-5000Å. They are based on a normalised, flat
continuum and include lines from HI, HeI/II, CII/III, Mg II, Ca II and Si II/III/IV; most
prominent are the Balmer lines of hydrogen. Then to obtain spectra appropriate for the
particular stars under study, these were rotationally broadened by Dr. P.F.L. Maxted, with

23
interpolation between the log g and Teff values as necessary. The values of log g, Teff and
vrotsin i assumed are given in table 3.6, together with the luminosity ratio to be used in
combining the spectra. Unless otherwise noted, data is taken from Clausen (1995).
3.5 / 16000 K 4.0 / 16000 K 4.5 / 16000 K3.5 / 24000 K 4.0 / 24000 K 4.5 / 24000 K3.5 / 30000 K 4.0 / 30000 K 4.5 / 30000 K
4.0 / 34000 K 4.5 / 34000 K
Table 3.5: Available spectra (log g / Teff)
Log g Teff (K) vrotsin i(kms-1)
L2/L1
DW Carinae A 4.17 27500 (165) 0.885DW Carinae B 4.19 26700 (165)GL Carinae A 4.18 29900 (100) 0.875GL Carinae B 4.20 29400 (100)LZ Centauri A 3.70 26500 165 1.156LZ Centauri B 3.66 26400 200V346 Centauri A 3.68 26500 165 0.195V346 Centauri B 4.12 24000 140AC Velantis A 3.42 18500 (85) 0.753AC Velantis B 3.46 16500 (85)NSV 5783 A 4.03 15700 (200) 0.868NSV 5783 B 4.03 15500 (200)
Table 3.6: Relevant physical properties of the stars
The rotational velocities listed above require a little comment; spectroscopic measurement of
rotational velocity has only been carried out for two of the systems - LZ Cen (Vaz et al.,
1995) and V346 Cen (Giménez et al., 1986). For the other systems, it was necessary to
estimate likely velocities. For close binaries of this type, an estimate can be obtained by
using the synchronous rotational velocity; in the case of the systems with elliptical orbits, an
average velocity was used. These assumptions lead to an underestimate of the actual
rotational velocity for two reasons:
a) Full synchronisation may not have been completely reached. For example, in the
case of LZ Cen, the closest binary in the sample, Vaz et al. (1995) find that the stars
may rotate marginally faster than synchronously, whilst Giménez et al. (1986)
report that both components of V346 Cen rotate much faster than synchronously,
consistent with an orbit that has not yet been circularised.

24
b) For elliptical systems, synchronisation appears to take place at the periastron
angular velocity, which is faster than the average angular velocity.
An underestimate of the rotational velocity can be expected to make the lines easier to
resolve than will in fact be the case, and so will lead also to an underestimate of the errors to
be expected. So this analysis is useful in identifying whether a system is worth further study
given the resources available; it does not guarantee that this study will be successful.
The above arguments clearly do not apply in the case of NSV 5783. In this case, the
calculated synchronous velocities would be less than 20 kms-1. Since this system has a longer
period and tidal effects are consequently much weaker than in the other cases, we cannot
expect significant synchronisation to have occurred. The value of 200 kms-1 assumed is of
the order to be expected for non-synchronised early B-type stars. As will emerge more fully
later, the value of the rotational velocity of NSV 5783 is crucial in determining whether any
worthwhile results can be obtained. Since a value of 200 kms-1 is larger than either of the
orbital velocity semi-amplitudes we can expect serious problems in resolving the two
components.
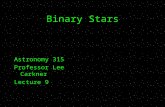
An example of a typical synthetic spectrum is shown in fig. 3.1; this is the spectrum of the
primary component of GL Car. Note that the region below ~3800 Å is not expected to be
realistic, as the Balmer series has only been calculated as far as Hι. This simplification,
together with the Balmer discontinuity itself will seriously distort the spectrum in this region.
The full set of component spectra is included in Appendix II(a). In Appendix II(b) the
spectrum of GL Car A is shown enlarged. Its major lines have been identified with the aid of
Walborn and Fitzpatrick (1990) and Moore (1972).

25
Fig. 3.1 The synthetic spectrum of the primary component of GL Car.

26
4. The observing site and equipment
The observations were carried out at La Silla, the European Southern Observatory (ESO) site
in Chile, from the 6th to 13th March 1996. The Danish 1.54m telescope was used, coupled
with the Danish Faint Object Spectrograph and Camera (DFOSC).
4.1 Observing conditions at La Silla
The relevant details of the site are summarised in table 4.1. They are taken from the ESO
User’s Manual (Schwarz and Melnick, 1993).
U (3600 Å) B (4400Å) V (5500 Å)Extinction per air mass (mags) 0.46 0.20 0.11Extinction, 30° from zenith 0.53 0.23 0.13Sky brightness, no Moon (mags. arcsec-2) 22.0 23.0 21.9Sky brightness, full Moon 18.0 19.0 17.9Median seeing (arcsec) 0.85
Table 4.1 Observing conditions at the ESO site.
The sky brightness at full Moon was determined using the guidelines within the SIGNAL
program (Benn 1992). These suggest a maximum lunar correction of 4m arcsec-2. These are
appropriate worst case values to use for this observing run as full Moon fell on 5th March
1996.
Given the seeing of ~0.85”, a slit width of 0.8” was chosen for estimating the amount of light
to enter the slit. This was done using the LIGHT_IN_SLIT program (Benn 1996), with the
slit assumed to be oriented vertically to eliminate the effects of differential refraction. This
yielded an estimate of 66% of the light of the star being collected. Whilst a wider slit would
give a stronger signal, it would also reduce the spectral resolution. The value chosen is a
sensible compromise.

27
4.2 The 1.54m Danish Telescope
Details of the telescope and the instrumentation used are given in table 4.2.
U (3600 Å) B (4400Å) V (5500 Å)1.54m telescopeUseful area (m2) 1.87DFOSCTransmissions:-
General optics 0.61 0.76 0.78Grism #6 0.68 0.62 -Grism #7 - 0.57 0.65Grisms #9 and #10 (combined) 0.27 0.32 0.26
Dispersions (Å mm-1):-Grism #6 110Grism #7 110Grism #9 26Grism #10 460
Ford-Loral 2048×2048 CCDEfficiency 0.77 0.76 0.86Readout noise (electrons per pixel) 7.2Pixel size, physical (µm) 15Pixel size, angular (arcsec) 0.4
Table 4.2 Properties of the telescope and instrumentation.
Information on the telescope is taken from Schwarz and Melnick (1993). There are two
mirrors between source and spectrograph; in line with the SIGNAL program defaults, a
reflective efficiency of 85% per mirror was assumed.
Data on the Danish Faint Object Spectrograph and Camera (DFOSC) is drawn from
Anderson (1996). Although it has other capabilities, e.g. direct imaging, for our purposes it
is a grism based echelle spectrograph. Eleven grisms are available; two were chosen to give
peak transmission in the blue range of the spectrum that is of chief interest for the stars under
study. These were the very high resolution echelle grism, #9, together with the course
resolution cross dispersing grism, #10. In addition, we require information on grisms #6 and
#7 for calibration purposes (see §4.3).

28
Details of the Ford-Loral CCD can be found in Anderson (1996). The readout noise is taken
from Storm (1996). When coupled with echelle grism #9, the wavelength scale is 0.39 Å per
pixel.
Transmissions and efficiencies are represented in table 4.2 by values at the centres of the
Johnson U. B and V bands. Full response curves over the spectral range of interest can be
found in Appendix I. Note that the peak transmission of the echelle orders has been used in
the table, so there will be regions, corresponding to the ends of the orders, where the
transmission is significantly less than this.
4.3 Calibration with observed count rates
The Ford-Loral CCD has been tested with grisms #6 and #7 on the star LTT 3218 (Anderson,
1996). This has V = 11.858, (B-V) = +0.220, (U-B) = -0.547 (Hamuy et al., 1992), giving us
below atmosphere magnitudes, assuming a zenith angle of 30°, of U = 12.06, B = 12.33, V =
11.99, using the method discussed in §3.2. The measured count rates, in e-s-1Å-1 are shown in
table 4.3. These measurements were made using a 10” slit which should ensure that all light
from the star is used. These results will be compared with predicted count rates in §5.4.2 to
estimate and correct for a systematic error in our predictions.
Wavelength (Å) 3500 4000 4500 5000 5500Grism #6 41 69 56 48 -Grism #7 - 52 59 61 58
Table 4.3 Measured count rates, in e-s-1Å-1 for the starLTT 3218 using DFOSC with the Ford-Loral CCD.

29
5. Producing the synthetic spectra
The composite spectra were produced (from the component spectra) using a FORTRAN
program, SYNTHESIS, written for this project. The operation of the program can be divided
into several stages, as outlined in fig. 5.1.
Read in systemparameters
Repeat foreach phase
Add noise to compositespectrum
Begin
Read in primaryspectrum
Write compositespectrum
Read in secondaryspectrum
End
Determine spectralrange
Add spectra
Calculate radialvelocity
Fig. 5.1 Overall flow of the SYNTHESIS program

30
All spectra are stored as one-dimensional FITS files (Wells et al., 1981), binned
logarithmically. The wavelength calibration is then specified by two FITS keywords: W0
specifies the base logarithmic wavelength (log to base 10 of the lowest wavelength in
Ångstroms) and WPC specifies the increment in logarithmic wavelength per pixel. In
handling the files, extensive use was made of the FITSIO library (Pence, 1995) of
FORTRAN subroutines for interfacing with FITS files.
The implementation of the disentangling algorithm requires all of the spectra to have the
same spectral range and scaling. We thus determine a common spectral range that will
always lie within both component spectra for all phases. This is then used for all the
composite spectra. An additional constraint is imposed that the spectra should not extend too
near to the Balmer limit. This is achieved with a cut off at 3800 Å1. There is also an
alternate version of the program which allows the spectral range to be specified manually.
This is useful for concentrating on a narrower window of the spectrum.
The resolution of the composite spectra is based on that expected with the DFOSC system
(0.39 Å; see §4.2), not that of the higher resolution component spectra.
5.1 Radial velocity shifts
To produce the composite spectra, it is necessary to know the wavelength shifts of the two
component spectra as a function of orbital phase, φ. This is readily determined given the
radial velocity, vR, of each star as a function of phase., i.e. the radial velocity curve. An
elliptical orbit is shown in fig. 5.2. We refer phases to the periastron point, P; this is
separated from the ascending node, L, by angle, ω, the longitude of periastron. For a circular
orbit, periastron is undefined so we instead take the passage of the primary through the
1 In view of subsequent work on edge effects (§8.3.3), this is probably a bad choice as it lies well onone of the Balmer lines; a better choice would have been a point between two of the lines.

31
ascending node as our point of reference. The angle between the star B and our reference
point is ν, the true anomaly. For a circular orbit, this will simply be 2πφ, but for an elliptical
orbit, the situation is more complicated. The method used to calculate ν, and hence vR,
adapted from Heintz (1978) is outlined below.
Fig. 5.2 Illustration of the key features of an elliptical binary orbit. We show the relative orbitof star B about star A. The projection of the observer’s line of sight onto the orbital plane isalso shown.
We first compute the mean anomaly, M, from the orbital phase, φ (relative to periastron),
M = 2πφ (5-1)
Next, we must obtain the eccentric anomaly, E, by solving Kepler’s equation,
E e E M− =sin (5-2)
This is solved iteratively, using the first approximation,
E M e M e M021
22= + +sin sin (5-3)

32
and successive approximations,
E EE e E M
e E'
sin
cos= −
− −−1
(5-4)
From the eccentric anomaly we proceed to calculate the true anomaly, ν,
ν =+−
−21
1 21
1
2
tan tane
e
Ewhere 0≤ν<2π (5-5)
The radial velocity is then given by
( )[ ]v K eR = + + +γ ω ν ωcos cos (5-6)
where K is taken to be negative for the secondary star. For our case, we ignore γ as this does
not affect the disentangling procedure. In fig. 5.3, we show a sample radial velocity curve
generated in this way for the eccentric binary V346 Cen. A full set of curves is included in
Appendix III.
Fig. 5.3 Radial velocity curve for V346 Cen. The zero of phase is taken to be the periastronpoint.

33
5.2 Selection of phases
5.2.1 Eclipses
Before discussing how these radial velocities are used to produce composite spectra, we take
a brief digression to consider which phases we should reproduce. Initial experiments with a
regular phase distribution (e.g. 0.00, 0.05, 0.10, 0.15, etc.) were felt to be unrealistic, as the
sampling of phases obtained influences the quality of the results of disentangling the spectra
(see §7.4) and real data would not be this regular. It was also desirable to avoid phases of
eclipse, as these are not suitable for use in disentangling. The final approach adopted, until
the observed phases were known, was to determine the phase ranges within eclipse and then
choose random phases, uniformly distributed over the remaining range. This range was
determined by producing simple model light curves, which can be expected to identify
correctly the onset and end of eclipse (ignoring distortions of the stars), but will not
accurately reproduce the eclipse profile, or any ellipsoidal variation outside of eclipse (see,
for example, the light curve of LZ Cen obtained by Vaz et al., 1995). They are adequate for
our purposes. The method is an extension of that used in §5.1 to determine radial velocity
curves, and as far as (5-9) follows Duffett-Smith (1981) We have obtained the eccentric
anomaly (5-3,4) and the true anomaly, ν, (5-5). We proceed to calculate the radius vector, r,
in the orbital plane as a fraction of the semi-major axis to be
r e E= −1 cos (5-7)
The position angle, θ, relative to the ascending node, is
( )( )θ
ν ων ω
=+
+
−tansin cos
cos1 i
(5-8)
The apparent separation, ρ, of the two stars, again as a fraction of the semi-major axis, is
then
( )ρ
ν ωθ
=+r cos
cos(5-9)

34
We thus know the separation of the two stars as a fraction of the semi-major axis. The
fractional radii of the stars are given is table 5.1 (Clausen, 1995).
Fig. 5.4 Illustration of the geometry of the eclipse of star 2 by star 1. We have drawn the line ofcentres horizontally for convenience, as it is only the apparent separation of the stars whichmatters, not the position angle.
Primaryradius
Secondaryradius
DW Car 0.321 0.306GL Car 0.2204 0.2094LZ Cen 0.339 0.369V346 Cen 0.211 0.107AC Vel 0.300 0.285NSV 5783 0.0812 0.0776
Table 5.1 Fractional radii of the stars inthe sample.
We now calculate the fractional area eclipsed. The geometry is illustrated in fig. 5.4. Star 2
is eclipsed by star 1. Given r1, r2 and ρ, we use the cosine rule to determine angles θ1 and θ2.
The area of star 2 that is eclipsed, ∆A, is clearly the sum of segments AP1B and AP2B.
Segment AP1B is given by
AP B r r r1 12
1 1 1 1 1
1
22= − ⋅
θ θ θcos sin (5-10)
Segment AP2B is given similarly. We thus find
∆A r r= −
+ −
1
21 1 2
22 2
1
22
1
22θ θ θ θsin sin (5-11)

35
Our simple model neglects limb darkening, so the drop in luminosity, ∆L is directly
proportional to the eclipsed area and to the luminosity of the star eclipsed, Li.
∆ ∆L
L
A
Ai i
= (5-12)
In terms of the luminosity ratio, L
L2
1
, for primary eclipse,
∆ ∆L
L L
L
A
rp =
+
1
1 2
1
12π
(5-13)
and for secondary eclipse,
∆ ∆L
L
L
LL
L
A
rs =
+
2
1
2
1
22
1π
(5-14)
We thus find the increase in magnitude to be,
∆∆ ∆
mL L
L
L
L= −
−
= − −
2 5 2 5 110 10. log . log (5-15)
A synthetic light curve for V346Cen, generated in this way is shown in fig. 5.5. A full set of
curves is included in Appendix III. They can be compared with observed light curves for LZ
Cen (Vaz et al., 1995) and V346 Cen (Giménez et al., 1986), remembering to adjust the
phases. The synthetic curves reproduce the positions, durations and depths of eclipses, and
successfully predict the total eclipse of the secondary of V346 Cen. If the curve for GL Car
is recalculated with ω modified to account for apsidal motion, there is also good agreement
with observations (Giménez and Clausen, 1986). Given this success, we are justified in using
these curves to predict the position and duration of eclipses as required for selecting phases.
These predictions are listed in table 5.2. The centre of the primary eclipse is also used to
convert between phases specified relative to periastron and those relative to primary eclipse.

36
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
PhaseR
elat
ive
Mag
nitu
de
Fig. 5.5 Light curve for V346Cen.
Primary eclipse Secondary eclipseCentre Duration Centre Duration
DW Car 0.250 0.213 0.750 0.213GL Car 0.148 0.131 0.734 0.144LZ Cen 0.250 0.199 0.750 0.199V346 Cen 0.199 0.098 0.874 0.087AC Vel 0.250 0.179 0.750 0.179NSV 5783 0.232 0.052 0.847 0.047
Table 5.2 Timings of eclipses.
5.2.2 Observational constraints
A final consideration for some systems, especially the long period system NSV 5783, was to
determine which phases would actually be available during the observing run. These data
were supplied by Dr P.F.L. Maxted (1996b) and used, where necessary, to further restrict the
choice of phases. The most dramatic effects were that for V346 Cen, there were alternating
visible and invisible windows of phase duration ~0.1 and that for NSV 5783, phases 0.1 to
0.4 would be unobservable.

37
5.3 Producing a composite spectrum
Our aim is to produce a composite spectrum, binned to the pixel size of the detector. This
means that we must add the intensity from each Doppler shifted spectrum, integrated over a
pixel width and weighted with the luminosity ratio.
5.3.1 Doppler shift
Based on the radial velocity determined in §5.1, we first shift the base logarithmic
wavelength of each spectrum, log10(λ0), by
( )∆ log ( ) log10 0 10λ = ⋅e
v
cR (5-16)
where vr has been determined separately for each star (5-6).
5.3.2 Binning the spectra
We then integrate each spectrum over a pixel width, very approximately, using the trapezium
method with three sampled points - the centre and either edge of the pixel. To find the value
at these points, the data points of the synthetic spectra are interpolated using the Everett
method (Froberg, 1969), based on three data points to either side of the desired wavelength.
5.3.3 Adding the spectra
Finally the contributions of the two spectra are added, weighted according to the luminosity
ratio, to produce a normalised, composite spectrum.
IL
IL
LI=
++
+1
1 11 2 (5-17)
5.4 Noise
5.4.1 Discussion
In order to add realistic noise to the spectra, it is necessary to estimate the level of noise to be
expected; the signal-to-noise ratio. This depends on several types of noise, principally

38
photon noise from the source and background and detector noise, assuming that the detector
is suitably shielded and that the system has been well designed to eliminate noise from
subsequent processing. These will now be discussed in more detail:-
a) Source photon noise arises because the light arriving at the detector is
fundamentally discrete in nature; it is composed of photons. The actual number
of photons arriving within a given time is random, and is described by a Poisson
distribution. Consequently, the signal from a particular pixel is not fixed by the
intensity, but will fluctuate about a mean value. A larger intensity will mean
that more photons will be detected per pixel, and there will be a tendency for
fluctuations to average out, reducing the level of noise in the data. It is found
that for a Poisson distribution, with an expectation of n counts, the standard
deviation is σ=√N. This gives a signal-to-noise ratio, in the absence of other
sources of noise, of
SN
N
NN= = (5-18)
b) Background photon noise is essentially photon noise from sources other than
the target. To estimate the number of counts that are actually from the target,
and not from the background, it is necessary to make a separate measurement of
just the sky at a different time and then subtract this from the total counts.
Because the two measurements involved (source plus sky and just sky) are taken
at different times, the background level will not be the same in both, but will be
subject to Poisson fluctuations. This will introduce an error in the corrected
source counts and hence increase the noise level. The main sources of
background counts, for a remote observatory, will be scattered light from the sun
(near dusk or dawn), the moon, and stars. As discussed in §4.1, at the time of
this observing run, the Moon will have dominated the background noise.

39
c) Detector noise in a solid state device such as a CCD is of two principal types.
Firstly there will be a small ‘dark current’ when the device is not illuminated,
giving a very slow build up of charge. Secondly there is the ‘readout noise’,
introduced at the end of the observation when electrons must be transferred
along a row of pixels to an output electrode. For a good CCD, readout noise
will typically be of the order of five electrons per pixel and the dark current will
be negligible; less than one electron per pixel per hour. Typically, we will at
least bin data across the width of the spectrum, if not lengthways as well. In this
case, the total readout noise increases as the square root of the number of pixels
being binned across, in the same way as Poisson noise increases with the square
root of the expected number of counts.
If all three sources of noise are present, then we add them in quadrature to obtain the overall
signal-to-noise ratio (Carter et al., 1994)
S
N
N
N N
obj
obj sky
=+ + σ2
(5-19)
where Nobj and Nsky are the number of counts expected from the object and from the sky
background, and σ is the total detector noise.
5.4.2 Predicted signal-to-noise ratios
The final signal-to-noise ratios were produced using the SIGNAL program (Benn, 1992),
modified to include data for the Danish 1.54m telescope and DFOSC. As the signal-to-noise
ratio will not be uniform across the spectrum, given the different U, B and V magnitudes of
the stars, different instrumental responses, etc. it was decided that some variation should be
modelled, although not to the level of reproducing the variation across each echelle order. A
compromise solution was to estimate representative U, B and V signal-to-noise ratios,
corresponding to wavelengths of 3600 Å, 4400 Å and 5500 Å. These three points would then

40
be used to define a cubic curve that would be used as the model for the variation is the signal-
to-noise ratio. The assumption has been made that any quantities for which only U, B or V
band values are known are sufficiently slowly varying that these values are approximately
equal to the values at the centre of the band.
To estimate U, B and V ratios involved bringing together below atmosphere magnitudes
(§3.1) and information on the observing site (§4.1) and the equipment used (§4.2). We also
calibrate the method using the observations of §4.3. The predicted numbers of electrons
(equal to the number of detected photons) per second calculated by SIGNAL are shown in
table 5.3, together with the corresponding observed data. The discrepancy is not unexpected,
and SIGNAL includes the option of defining throughput corrections. The table gives the
correction that should be multiplied by our predictions. The average value for the blue
wavelengths is 0.47.
Predicted electrons(s-1Å-1)
Measuredelectrons (s-1Å-1)
Correction
Grism #6 U 78 41 0.53Grism #6 B 127 56 0.44Grism #7 B 116 59 0.51Grism #7 V 153 58 0.38
Table 5.3 Comparison of predicted and measured count rates for the starLTT 3218. The correction to be applied to the predictions is given also.
There are two other items we must know. Firstly the exposure time; this was taken to be 10
minutes. Secondly, we need to know the width of the spectrum in pixels. The seeing disc of a
star is expected to be ~0.8”, so to make maximum use of the available light, we choose a
width of three times this - 2.4” or 8 pixels.
We are now ready to use SIGNAL to estimate the signal-to-noise ratio for the stars in our
sample. We note the number of counts to be expected from source and sky for the faintest
star in the sample, GL Car in table 5.4. The readout noise (7.2 electrons per pixel), binned
over a width of 8 pixels, is ~21 electrons. As can readily be seen, both background and
readout noise will be much smaller than the photon noise from the source.

41
U B VSource counts 12504 20388 14227Background counts 17 16 24
Table 5.4 Source and background counts expected(in photons per pixel step in wavelength) for a 10minute exposure of GL Car.
The estimated signal-to-noise ratios to be expected for 10 minute exposures of all the stars in
the sample are shown in table 5.5; these results are very encouraging and suggest that we can
expect the observing run to yield high quality data. We note that since the noise is vastly
dominated by photon noise from the source, to a very good approximation, the signal-to-noise
ratio scales as the square-root of the number of counts, and hence as the square-root of the
exposure time.
U B VDW Car 141 170 130GL Car 110 141 117LZ Cen 287 340 262V346 Cen 226 279 212AC Vel 174 231 182NSV 5783 236 263 200
Table 5.5 The expected signal-to-noise ratios for 10 minuteexposures.2
5.4.3 The noise model
We adopt a Poisson model for the noise; as discussed above, the noise is vastly dominated by
photon noise from the source itself. We begin with the signal-to-noise ratio. For Poisson
noise, with N0 counts in the continuum,
NS
N0
2
=
(5.20)
2 Due to an error in calculating the correction factors (table 5.3), the original signal-to-noise ratios thatwere used in all subsequent work were approximately 15% too low. This probably makes only a smalldifference to deduced results (see §7.2 for discussion of the sensitivity of disentangling to the signal-to-noise ratio), but does mean that they should be seen as slightly pessimistic. The values quoted here arecorrect.

42
We take this to be the number of counts expected from a pixel in the continuum part of the
spectrum. For a general pixel, possibly below the continuum, with relative intensity I, as
given by (5-17), we then expect
N N IS
NI= =
0
2
(5-21)
We take this to be the mean of a Poisson distribution and generate the actual number of
counts, N, randomly. We finally convert this back to a normalised intensity (with noise) by
inverting (5-21)
IS
NNnoise =
−2
(5-22)
5.4.4 The validity of the model
This approach to the noise will be valid provided it can be taken that the each pixel of the
spectrum is independent of the surrounding ones. Whilst this would be the case with the
simplistic approach taken here, in reality the data will not be disentangled in its raw form, but
will be rebinned onto a logarithmic grid. This process will involve interpolating the counts
from the individual pixels and will remove the independence of the resolution elements; the
noise in the resulting spectrum will be autocorrelated. In this case, a simple Poisson model
for the noise is not adequate. An alternative approach (Maxted, 1996a) involves taking the
residuals from a fit to an observed spectrum, scaling for different signal-to-noise ratios and
applying these as noise to a synthetic spectrum, or to a fit to a different data set. Since these
residuals are based on real data, they will reproduce the autocorrelation and this can be
expected to be the most realistic model of the noise.
Such an approach would be useful for a final analysis of the errors involved. For this
preliminary analysis, however, it is not necessary and the simpler Poisson model is used.

43
5.5 Sample results
A section from a sample set of spectra for DW Car, covering the phase range 0.0 to 0.5 is
shown in fig. 5.6. Note that the two components of a line are of different strengths, because
the secondary makes less contribution to the overall spectrum. Also, observe the extensive
Stark broadened wings of the two hydrogen lines, Hδ (4102) and Hγ (4340) and the fact that
the two components of these are never well resolved.
0.0
0.1
0.2
0.3
0.4
0.5
Fig. 5.6 A sample set of spectra for DW Car, with phases 0.0 to 0.5.

44
6. Disentangling the spectra to determine system parameters
Having obtained our synthetic spectra, we now discuss how we use the disentangling
technique to analyse them. We begin by emphasising that our chief goal in applying
disentangling is to determine accurate system parameters, for systems for which the spectra
are sufficiently blended to make other methods unreliable. In this respect, we differ
somewhat from Simon and Sturm (1994; hereafter, SS94), who are more concerned with
obtaining disentangled spectra of the components for subsequent analysis.
6.1 The approach to disentangling
Hγ
CII(4267)
HeII
(4387)
Fig. 6.1 Comparison of a reconstructed component spectrum with the original synthetic spectrumfor AC Vel in the vicinity of the Hγ line. Notice the reproduction of the structure in the lowwavelength wing of Hγ.
We have used the FORTRAN program DANGLE (Maxted, 1996a), which is similar to the
program used by SS94, and gives broadly similar results when applied to data for DH Cephei
(Sturm and Simon, 1994). We find that the residuum to the fit, for a given set of orbital
parameters, converges to two significant figures after approximately 20 iterations; four
figures takes nearly 100 iterations. We choose the latter to ensure adequate precision for

45
optimising the orbital parameters. A sample reconstructed spectrum is shown in fig.6.1,
compared with the original synthetic spectrum.
6.2 Optimisation of system parameters
6.2.1 The system parameters
We begin by identifying which system parameters are to be optimised. As discussed more
fully by SS94, the general case, where we have no prior knowledge is rather unpleasant. It
would appear that the most general set of parameters to be fit for n spectra is 2n - the velocity
of each component for each spectrum. In fact, the situation may be even worse than this, as
we may not have a definite identification of which component is which in each spectrum.
This introduces a further n switches between the possible identifications.
In reality, we can usually simplify this scheme considerably. For eclipsing binaries, we will
generally have an ephemeris for the system, allowing us to identify the phase of each
spectrum, given its observation time. For systems showing apsidal motion, we will also
know the eccentricity and longitude of periastron. Alternatively, we may have evidence that
the orbit is circular. In either of these cases, disentangling is used only to identify velocities.
SS94 choose to specify KA, the primary velocity semi-amplitude, and q, the mass ratio. We
prefer to specify both the orbital velocities, KA and KB, explicitly. As noted previously,
disentangling is independent of the systemic velocity, γ.
6.2.2 Discussion
Our goal in all optimisation methods is to minimise the residuum of the fit to the spectra with
respect to the parameters. The residuum as a function of N parameters can be thought of as
an N-dimensional surface, in our case, two-dimensional. Our best estimate of the parameters
will then lie at the global minimum of this surface. Finding the minimum is a standard
problem which can be approached in several ways.

46
There are difficulties to be considered, however. Firstly, for each trial parameter set, we
must follow through the full disentangling procedure. This is a non-trivial task, and hence to
optimise the parameters becomes very computationally intensive. This provides a motivation
for choosing a reasonably efficient algorithm to optimise the parameters, using a minimal
number of trials.
To be weighed against this, however, is the fact that the surfaces are not always smooth, and
often show many secondary minima. In this case, we must take great care to ensure that the
minimum found is indeed a global minimum, not a local minimum. Two examples are shown
below; in all grids, we show the reciprocal of the residuum, as maxima are easier to see on
these plots than minima. In fig. 6.2, we show an ideal grid for well behaved system, LZ Cen.
This system is bright, has a circular orbit and high radial velocity amplitudes. The grid was
produced for a data set of twenty synthetic spectra. In fig. 6.3, we show how pronounced the
secondary maximum problem can be. This grid was produced by disentangling real spectra
of DH Cep (Sturm and Simon, 1994). The data set comprised only eight spectra from a
rather narrow spectral range. The grid for V346 Cen reproduced in the next section (fig. 7.2)
shows that the occurrence of secondary minima is not only a problem with observed spectra.
It is impossible to deal with both of these difficulties fully, as the fastest algorithms are prone
to fall into local minima, but the most careful approach - to calculate the residuum for all
possible values of the system parameters to within the desired precision and choose the
lowest - is computationally impractical. We must seek a compromise.
6.2.3 The simplex algorithm
SS94 use the Downhill Simplex method (Press et al., 1992) to find a minimum. This is
straightforward to apply, but it is vulnerable to settling onto a ‘shelf’ of the surface, or into
local minima.

47
Fig. 6.2 A sample grid based on synthetic spectra of the well behaved system LZ Cen.
Fig. 6.3 A sample grid based on observed spectra of DH Cep.

48
6.2.4 Recursive grid searching
Fig. 6.4 An illustration of the grid search technique. We begin with a 2.5 kms-1
grid, with a minimum at K 1=205.0 kms-1, K2=222.5 kms-1. We then narrow into a 0.5 kms-1 grid, centred on the previous best value. This is minimised atK 1=204.0 kms-1, K2=221.5 kms-1. We finally zoom in again to a 0.1 kms-1 grid,which has a minimum at K1=204.2 kms-1, K2=221.7 kms-1.
Given a two-dimensional surface, an alternative solution is suggested. This is illustrated in
fig 6.4. We begin by constructing a very course grid, centred on previous estimates of the
velocity semi-amplitudes, and with a sufficient range that we can be confident that the true
values are not outside this range. We find the minimum of this grid and then construct a finer
grid centred on this minimum. This process is repeated until we have located the minimum
to the desired precision. We thus ensure that the whole parameter space is sampled, at least
at a course resolution, without the massive computational requirements involved in
constructing a comprehensive grid. We find that a suitable size grid comprises of the order
of 10×10 points. If we choose a much larger grid then the number of calculations (increasing
as the square of the grid width) is too large. If we choose too small a grid then there is a

49
danger of missing a minimum between the grid points. It should be noted that this approach
is less practical when we seek to optimise more than two parameters, as the number of
calculations required increases rapidly with the number of parameters to be included.
6.3 Estimating errors
SS94 estimate formal errors by analysing the residuum around the minimum. This assumes
that χ2 model fitting theory is applicable to the disentangling problem. In particular, we
require that the noise in the spectrum is Gaussian (this should be approximately true for large
count rates). Knowing the signal-to-noise ratio then allows us to estimate the variance of the
spectrum and hence map the residual surface to a χ2 surface. We invoke model fitting theory
to relate the curvature of the χ2 surface to the errors in the parameters. Mathematically, given
the residual surface, r(K1, K2) and signal-to-noise ratio, we obtain χ2(K1, K2),
χ2 2
2
=
r
S
N(6-1)
We calculate the 2×2 curvature matrix, Γjk, numerically using the adjacent values of χ2 on the
surface,
Γ jkj kK K
=1
2
2 2∂ χ∂ ∂
(6-2)
The curvature matrix is finally inverted and the standard error, σ(Kj), determined,
( ) ( )σ2 1K j jj= −Γ (6-3)
Working with synthetic spectra, we adopt a more robust approach. We begin by constructing
synthetic spectra based on assumed values of K1 and K2. Rather than doing this just once, we
produce ten sets of spectra, for each set of conditions, with different random noise. We then
disentangle all ten sets, obtaining a best estimate of K1 and K2 for each. By comparing these
estimates with each other we estimate our random errors from the population standard

50
deviation of the results, σn-1. Furthermore, we can compare the mean value from the ten data
sets with the originally assumed value to search for the presence of systematic errors.
We have also applied curvature analysis to these data sets and find that in many cases, errors
calculated in this way are significantly less than the scatter between different data sets. In
particular, we often find that whilst the formal error on K1 is representative of the scatter, that
on K2 may be too or three times too small. In an effort to avoid this problem, we take care to
ensure that the spectral regions under examination are free of any features near the ends that
may introduce edge effects and we reject any data sets for which the surface does not appear
to be a featureless, smooth curve. Further, we average the signal-to-noise ratio through the
lines to allow for the lower number of counts and hence lower ratio there. Even with these
precautions, large discrepancies may remain. This leads us to conclude that the curvature of
the residuum is an unreliable indicator of the errors in the system parameters and that using
this method can lead to serious underestimates in quoted errors.

51
7. Preliminary results
Before the observing run, a number of tests were carried out to identify which systems were
likely to yield poor results, and to determine how sensitive disentangling is to changing such
parameters as the exposure time for each spectrum, the number of spectra used for a given
star and the particular phases at which a star is observed.
7.1 Expected errors
7.1.1 Overall predictions
A best estimate of the errors to be expected for each system, given an optimum set of data,
was calculated. This assumed that twenty spectra were taken, from a uniform, random
distribution of phases, outside of eclipse. Signal-to-noise ratios (based on ten minute
exposure) from §5.4.2 were assumed. Errors are calculated based on the population standard
deviation of ten data sets, with different phases (but drawn from the same distribution
function), and different noise. Until the observed phases are known, using a variety of sets of
phases was the only way to estimate a realistic average error, given that each set of phases
chosen will have its own error, some better than average, some worse. The phases for NSV
5783 were determined somewhat differently; see §7.1.3 below. The results are summarised
in table 7.1. We also show the expected errors in M1 and M2 obtained using the method of
§1.2. For four of the systems we thus expect errors well within the range desired. The other
two are poor for their own reasons, discussed below.
K 1
(kms-1)σ1
(kms-1)K 2
(kms-1)σ2
(kms-1)σ(M 1)(%)
σ(M 2)(%)
DW Car 262.3 1.0 278.0 1.3 0.8 0.7GL Car 235.0 1.4 245.0 0.9 0.7 0.8LZ Cen 223.0 0.8 205.0 0.8 0.7 0.7V346 Cen* 135.0 0.5 190.0 2.8 2.3 1.8AC Vel 145.1 0.4 145.8 0.4 0.5 0.5NSV 5783* 100.0 4.8 110.0 4.6 7.7 8.0
Table 7.1 Expected errors on the velocity semi-amplitudes and masses based onrealistic estimates of the observations that will be made. Stars marked * arediscussed more fully below.

52
7.1.2 V346 Centauri
V346 Cen is something of an anomaly within the sample due to its extreme luminosity ratio
of 0.195 (§3.3). Because of this, it becomes rather difficult to identify the lines of the
secondary in the spectrum, except for lines which are both strong and fairly narrow, a rare
combination. An example is shown in fig. 7.1. As a consequence, determining the radial
velocity of the secondary is very difficult and entails large uncertainties, as seen in table 7.1.
This effect can be clearly seen in the residual surface (fig.7.2), which is sharply peaked in the
K1 direction, but very shallow in the K2 direction. Because the mass primarily depends on
K1+K2, this large uncertainty in K2 means that we cannot determine either mass accurately.
Sec.
Prim. Sec.
Prim.CII
(4267)
HeI(4387)
Hγ
MgII(4481)
HeI(4471)
Fig. 7.1 A sample spectrum of V346 Cen, illustrating the effects of the extreme luminosity ratio.Only in the CII (4267) and HI (4387) lines can the secondary contribution (to the left) be madeout.

53
Fig. 7.2 A typical residual surface for V346 Cen, showing the very shallow curvature in the K2
direction. Note also the presence of several secondary maxima.
7.1.3 NSV 5783
NSV 5783 involves quite different, but even more serious problems than V346 Cen. This is a
relatively long period system, which not only makes for small orbital velocities, but also
gives a very long synchronisation timescale. As discussed in §3.3, this means the rotational
velocities are likely to be higher than the orbital ones. The consequences are illustrated in
fig. 7.3, showing a section of a synthetic spectrum calculated near quadrature (i.e. maximum
radial velocity difference). The two spectral components are not visibly resolved. While
disentangling can extract information that the eye cannot, for example, from the changing
shape of the composite spectral lines, the results are expected to be very poor as is shown by
the error estimates in table 7.1.
Because of this difficulty, phases were chosen somewhat differently for this system. Of the
twenty phases required, half were chosen in the same way as for the other systems; the other

54
ten were concentrated within the phase windows 0.01-0.05 and 0.91-0.99 to bracket the point
of largest velocity difference; the maximum itself was not expected to be visible (see §5.4.2).
It is hoped that the actual observations can also be concentrated around this point.
Hγ
HeI(4387)
MgII
(4481)
HeI
(4471)
Fig. 7.3 A sample section of spectrum of NSV 5783 near quadrature. There is no clear indicationthat this is a binary spectrum.
7.1.4 Systematic errors
Using the data sets on which table 7.1 was based, we also calculate the mean and error on the
mean for each data set, in order to search for any systematic errors that may be occurring. In
table 7.2 we compare these values with the original K1 and K2 used to generate the synthetic
spectra.
K 1
(kms-1)<K1>
(kms-1)σ<K1>
(kms-1)K 2
(kms-1)<K2>
(kms-1)σ<K2>
(kms-1)DW Car 262.3 262.02 0.17 278.0 278.12 0.37GL Car 235.0 235.08 0.47 245.0 245.04 0.29LZ Cen 223.0 223.24 0.27 205.0 204.99 0.26V346 Cen 135.0 135.09 0.17 190.0 189.83 0.95AC Vel 145.1 145.23 0.11 145.8 145.80 0.14NSV 5783 100.0 102.45 1.33 110.0 108.02 1.34
Table 7.2 Comparison of original velocity semi-amplitudes with mean results ofdisentangling.

55
We construct the χ2 statistic for these results. We test the hypothesis that each measured
mean is drawn from a Gaussian distribution centred on the original assumed value, with
standard deviation equal to the error on the mean. We calculate χ2=10.94. This is much less
than the critical value (at a reasonable level of significance of 5%) of 21.0, so we conclude
that the results are indeed free from systematic errors. This supports the statement of Simon
and Sturm (1994) that disentangling does not require systematic corrections of the types
discussed by Popper and Hill (1991).
7.2 Exposure time needed
The exposure time chosen determines the number of counts, and hence is a major contributor
to the value of the signal-to-noise ratio; as shown in §5.4.1, when the source dominates the
signal, the signal-to-noise ratio scales as the square root of the number of counts and hence of
the exposure time. A series of tests of the effectiveness of disentangling were thus carried
out with different signal-to-noise ratios to represent the effect of different exposure times.
The system chosen was the brightest in the sample, LZ Cen, as this gives us the highest base
signal-to-noise ratio to start with. All these tests were carried out with 20 spectra, distributed
randomly out of eclipse as discussed above. The exposure times were 10 minutes (normal
S/N), 5, 2.5 minutes and 1.25 minutes. Note that the 10 minute exposure was based on a
different run to that used in table 7.1. The results are summarised in table 7.3.
Exposure time(minutes)
Fraction ofnormal S/N
σ1
(kms-1)σ2
(kms-1)10.00 1.00 0.5 0.805.00 0.71 1.1 1.202.50 0.50 1.7 1.601.25 0.35 4.3 4.6
Table 7.3 Illustrating the effect of a varying exposure time(i.e., signal-to-noise ratio) on the quality of results obtainedwith disentangling for LZ Cen.
The signal-to-noise ratio clearly does make a significant difference to the quality of the
results obtained. This is illustrated graphically in figs. 7.4 and 7.5 and will be discussed
further in the next section in comparison with results obtained there.

56
7.3 The number of spectra needed
We also would expect that the number of spectra obtained would influence the quality of our
results. Accordingly, we repeated the disentangling process for LZ Cen with varying
numbers of spectra. All other details are the same as for the 10 minute exposure in §7.2. The
process was repeated with 5, 10, 15 and 20 spectra; the 20 spectrum data set was the same set
as was used in table 7.3. These results are shown in table 7.4. One immediately apparent
result is that there is little difference in the quality of results between sets of 15 spectra and
those of 20 spectra. This suggests that there is little gain (at least for LZ Cen) in obtaining
much more than about 15 spectra.
Number ofspectra obtained
σ1
(kms-1)σ2
(kms-1)20 0.5 0.815 0.7 0.710 1.9 1.005 3.0 2.0
Table 7.4 Illustrating the effect ofvarying the number of spectra usedfor disentangling LZ Cen.
0
1
2
3
4
5
0 50 100 150 200
Total observing time / minutes
σ 1 /
kms
-1
Exposure time (measurements)
Number of spectra (measurements)
Exposure time (fit)
Number of spectra (fit)
Fig. 7.4 Comparing the effect of varying the individual exposure time and varying the totalnumber of spectra on the average error expected for LZ Cen A. A best power law fit to eachdata set is also shown.

57
0
1
2
3
4
5
0 50 100 150 200
Total observing time / minutes
σ 1 /
kms
-1
Exposure time (measurements)
Number of spectra (measurements)
Exposure time (fit)
Number of Spectra (fit)
Fig. 7.5 Comparing the effect of varying the individual exposure time and varying the totalnumber of spectra on the average error expected for LZ Cen B. A best power law fit to each dataset is also shown.
The results from tables 7.3 and 7.4 are illustrated graphically together in figs. 7.4 and 7.5 for
K1 and K2 respectively. The standard deviation of the results is plotted as a function of total
on-target time for each case; this is a measure of the total amount of light we detect from all
the spectra obtained. As can be seen, there is no consistent or large difference between the
effects of varying the number of spectra and varying the exposure time, if the total time on
the target is fixed. If there is a small difference, it would require a more thorough analysis to
identify it; given the minimal practical significance of such a result, this is not justified.
We can conclude that if it is necessary to reduce the total observing time on a source, from
the point of view of the quality of results obtained, it does not matter if the reductions are
made in the number of spectra obtained, or the exposure time for each spectra, provided
neither is reduced too far. From a practical perspective, it is more efficient to keep the
telescope locked onto one target for a single long exposure, than to repeatedly slew it from
target to target, reading out the CCD each time. It is thus most practical to cut down the
number of exposures but keep to the planned duration of 10 minutes.

58
7.4 Optimum phase distribution
A final investigation was carried out into how the distribution of observed phases influences
the quality of results obtained. Again, these tests were all carried out for LZ Cen, with 20
spectra and 10 minute exposures. Three options were compared, all with phases chosen
randomly from a uniform distribution within the range given in table 7.5. The last option is
not a realistic one; this phase range corresponds to eclipses for LZ Cen; it is included to test
the effect of having only phases far away from quadrature. The results are shown in table
7.5; they were not all analysed in full detail, but illustrate trends adequately.
Phase Range σ1
(kms-1)σ2
(kms-1)Quadrature ± 0.125 ≈0.9 ≈0.8Quadrature ± 0.050 ≥2.4 ≥1.8Conjunction ± 0.125 ≈1.4 ≈1.9
Table 7.5 The effect of disentangling spectra fromdifferent phase ranges on the uncertainty in theresults.
The phase range is clearly significant. We see that whilst it is important to concentrate on
phases near quadrature, we should not do so too strongly or this will also degrade the results;
we need as wide a phase range as is practical. This supports the approach taken above of
using all of the phase range outside of eclipse.

59
8. Rectification of the spectra
We now proceed to consider several issues relevant to the reduction and subsequent analysis
of the spectra. This work took place after the observing run, so the actual phases observed
were known. The two systems for which the most data were available were AC Vel (15
spectra) and DW Car (18 spectra). We will use the actual phases observed for these two
systems in subsequent work. Since the data had not yet been reduced, we did not have access
to the actual signal-to-noise ratios.
The spectra were obtained with an echelle spectrograph. Whilst this does allow a large
wavelength coverage at high dispersion, it does not provide a single, continuous spectrum.
Instead a number of diffraction orders are obtained, covering small, overlapping regions of
the spectrum. An ideal data reduction would combine all of the orders together into a single,
rectified spectrum for subsequent analysis. This entails considerable difficulties, as the
response varies between orders and over a single order, so that we must be very careful in
matching adjacent orders up. Because of the interruption of the smooth continuum by
spectral lines, it may be impossible to match the orders up exactly leading to rectification
errors, i.e. regions of the composite spectrum for which the continuum value is not exactly
one. This may go unnoticed if it occurs within a line or group of lines where there is no
continuum as such. It will then lead to the lines being incorrect since their depth is defined
relative to the incorrect continuum.
In this section we consider issues raised by this problem and use synthetic spectra to test the
sensitivity of the disentangling process to rectification errors.
8.1 Local rectification errors
The spectral region from 3800 Å to 5000 Å is spread over echelle orders 14 to 18. One
approach to modelling rectification errors is to assume that rectifying the centre of an order is

60
straightforward, but that it is in matching up the boundaries of orders that difficulties lie. In
this model, we would expect localised errors at the joins of the orders. The model chosen
was to apply a random distortion function to each spectrum at each of the midpoints between
the maxima. The function consisted of the sum of a sine and cosine term, with random
amplitudes, within a normalised Gaussian envelope:
( )fwidth
Awidth
Bwidth
λλ λ π λ λ π λ λ
= −−
−
+
−
explog log
sinlog log
coslog log0
20 0
2 2(8-1)
where λ is the wavelength of the current pixel, λ0 is the wavelength of the midpoint between
two orders and the width is taken to be 10% of the separation of the two adjacent maxima. A
and B are randomly determined randomly from the range -amp. < A < +amp., where amp. is a
characteristic amplitude of the errors. Because of the complex nature of the function, this is
not necessarily the maximum amplitude of errors allowed.
Fig. 8.1 Typical distortion of the continuum produced by 5% local rectification errors for ACVel. Whilst an effect on this scale would be easily detected, it illustrates the nature of the

61
problem. The HeI (4471) line lies right at the junction of two orders, making it difficult to matchthe spectra correctly.
It is found that such errors normally stand out clearly in an incorrectly rectified spectrum, and
so 5% can be taken as an absolute maximum for such errors; 1 or 2% would be the most that
is likely to be present. They often appear similar to very broad emission or absorption lines;
but being present on only one spectrum, they can easily be identified as anomalous. Fig. 8.1
shows an example that is less easily removed.
Rectification errors generated in this way were applied to a set of spectra of AC Vel, with
amplitudes of 1%, 2% and 5%, together with a reference data set using the same phases but
with no rectification errors. The results are presented in table 8.1.
K 1 (kms-1) σ1 (kms-1) K 2 (kms-1) σ2 (kms-1)Reference 145.0 0.2 145.9 0.41% errors 145.0 0.2 145.9 0.42% errors 145.0 0.2 145.9 0.55% errors 145.0 0.2 145.9 0.5
Table 8.1 The effect of localised rectification errors on thedisentangling process for AC Vel.
We see that even at the 5% error level the disentangling process is almost completely
unaffected by localised rectification errors. There is a small increase in the scatter in the
results but not by enough to be of significance. We conclude that provided such errors are
within the 5% level, the disentangling analysis will not suffer.
8.2 Large scale rectification errors
An alternative approach is to model rectification errors by a slowly varying function
extending over the whole spectrum. This has the advantage of avoiding the obvious
distortions obtained with localised functions, e.g. the apparent ‘emission lines’ discussed
above. Such errors are modelled with a polynomial function. In order to obtain a more
precise definition of the amplitude of the rectification errors, we normalise the resulting
spectrum so that the amplitude is the maximum deviation of the function from unity. The
approach taken was to rescale the x-axis in terms of a dimensionless variable x, running from

62
-1 at the lowest wavelength to +1 at the highest. A fifth order polynomial was chosen, with
equally weighted random coefficients, in the range -1 < a < +1, etc.,
( )f x ax bx cx dx ex f= + + + + +5 4 3 20 (8-2)
The whole function was then normalised so that its largest value was equal to the chosen
amplitude. We then multiply the spectrum by 1+f to obtain the spectrum with errors. A
sample is shown in fig. 8.2.
Fig. 8.2 An example of large scale 5% rectification errors applied to a spectrum of DW Car. Thedeviations of the continuum are clearly visible. This is a particularly pernicious example,however, as the full 5% deviation is not obvious; it falls at the far left of the spectrum wherethere is no defined continuum. Such errors are extremely difficult to remove.
The effects of these large scale errors were found to be more significant, so they were
analysed rather more thoroughly. The full range 0-5% in 1% steps was modelled and
disentangled for both AC Vel and DW Car. The results are shown in table 8.2. We see that

63
the uncertainty increases significantly in the presence of 2-3% rectification errors. There is
also a hint that velocities may be systematically overestimated for larger errors. This was
tested in the same way as in §7.1.4, constructing the χ2 statistic for the data from 3-5% errors.
We find χ2=26.0. This significantly exceeds the 5% critical value of 21.0, so we cannot
accept the hypothesis that the results are unbiased; the systematic overestimate is statistically
significant. In attempting to fit the rectification errors, the disentangling process imposes
severe distortions on the component spectra and it may be that slightly high velocities give
more freedom in doing this. The details are unclear, however.
K 1 (kms-1) σ1 (kms-1) K 2 (kms-1) σ2 (kms-1)AC Vel Reference 145.0 0.2 145.9 0.4
1% errors 145.0 0.2 145.9 0.32% 145.0 0.2 146.1 0.53% 145.2 0.5 146.6 1.04% 145.3 0.5 146.7 1.15% 145.3 0.6 146.4 1.0
DW Car Reference 262.2 1.3 278.4 1.61% errors 262.3 1.3 278.2 1.62% 262.1 1.3 278.6 1.93% 262.2 1.4 278.8 1.84% 262.1 1.4 278.6 1.85% 261.9 1.8 279.3 2.3
Table 8.2 The effect of large scale rectification errors on the disentangling process forAC Vel and DW Car.
We can conclude, however, that provided the large scale variations in the continuum are kept
to below 2%, the disentangling process is not significantly affected, at least for these systems.
Errors of larger than this should be fairly obvious, but if it turns out that this accuracy cannot
be achieved then a more thorough analysis will be necessary, especially as the effect of
rectification errors appears to be systematic, not purely random.
8.3 Disentangling the orders separately
We have also approached the problem from the opposite direction. Rather than trying to
merge several orders into a single correctly rectified spectrum, we simply treat each order as
a separate, albeit restricted, spectrum. Rectification of each order on its own is much more
straightforward. We then disentangle all the order 14s as one set, all the order 15s as a

64
second set, etc. This approach was inspired by repeating the work of Sturm and Simon
(1994) on DH Cep using our implementation of disentangling. Sturm and Simon’s data set
consists of 27 spectra, all at different phases and spread over four narrow spectral ranges.
Because of the different phases, the spectral ranges cannot be combined into a single
spectrum, and because we require spectra on a uniform grid, we cannot combine different
ranges in one disentangling run. The approach adopted is to disentangle each range
separately, yielding four estimates for K1 and K2. We then calculate the mean and the error
on the mean from the four measurements. The same method can be adopted in dealing with
the different orders of the echelle spectra.
8.3.1 Forming the order spectra
The approach taken is very simplistic. We know the centre points of the spectral orders
(Appendix I). We simply cut the spectrum at the midpoints between two orders. We do not
allow any overlap and we do not attempt to vary the signal-to-noise ratio (beyond the cubic
variation already included). The model is thus not very realistic, but does facilitate a direct
comparison between the disentangling one large spectrum and several smaller segments of it.
Including extra variation in the signal-to-noise ratio, etc., would have its own effect on the
results and that is not what we are looking at here. We reproduce four orders, listed in table
8.3. The complete spectrum to which they will be compared is also listed.
Wavelength range (Å)Full spectrum 3841 - 4746Order 18 3841 - 4025Order 17 4025 - 4234Order 16 4234 - 4472Order 15 4472 - 4746
Table 8.3 The spectral ranges of the echelleorders to be disentangled separately.
8.3.2 The initial results of disentangling
Spectra of AC Vel were generated and disentangled in the usual way; no special
modifications are needed to change the spectral range to be disentangled. The results of the

65
analysis are listed in table 8.4; as previously, 10 separate data sets were disentangled to allow
us to estimate the error on an individual result. This method of error estimation is not, of
course, an option with real data. As expected, the results of disentangling a single order are
not as good as working with a whole spectrum. Before combining these results, we check for
any obvious reasons for the lower orders to be so poor.
K 1 (kms-1) σ1 (kms-1) K 2 (kms-1) σ2 (kms-1)Full spectrum 145.0 0.3 145.8 0.5Order 18 145.2 0.5 145.2 0.4Order 17 145.0 0.6 145.8 1.4Order 16 145.2 0.5 146.5 1.7Order 15 145.3 0.8 147.2 2.3
Table 8.4 The results of disentangling the echelle orders of spectra of AC Velseparately.
8.3.3 Edge effects
HeI
(4471)
Fig. 8.3 An example of a 15th order spectrum.
An example 15th order spectrum is shown in fig. 8.3. By far the strongest line is the HeI
(4471) line, right on the boundary of orders 15 and 16. As this moves into and out of the
spectrum at different phases it can be expected to severely disrupt both orders, order 16 less

66
so as this contains other strong lines. A similar effect will occur with HeI (4026) on the
boundary of orders 17 and 18. In these cases, the presence of other strong lines reduces its
effect. To test the significance of these edge effects, the spectral range of each order was
reduced slightly to ensure that each edge lies well within a continuum region, or in the case
of the low wavelength end of order 18, as near to this as possible, since the blending of the
Balmer lines is sufficient that there is no true continuum. Disentangling was repeated with
these new spectra; the results are shown in table 8.5. It should be emphasised that the
spectral range of each order was reduced, so these results were based on less data than those
of table 8.4.
K 1 (kms-1) σ1 (kms-1) K 2 (kms-1) σ2 (kms-1)Order 18 145.4 0.5 145.0 0.9Order 17 144.9 0.6 145.9 1.1Order 16 145.3 0.5 146.0 1.6Order 15 145.9 1.4 146.0 2.8
Table 8.5 The results of disentangling the echelle orders of spectra of AC Velseparately, with edge effects removed.
Whilst the differences are not conclusive, and in some cases there is an improvement with
edge effects removed, on the whole, the quality of results is degraded by clipping the spectra;
we conclude that although lines on the edge of the spectrum do not provide an ideal
contribution, some information can still be gathered from them, and so it may be better to
leave them partially in and use all the information that is available. This is the case if we are
looking for the most accurate results; it may be that these edge effects have other, detrimental
effects, for example to the smoothness of the surface, which should be avoided if we want a
‘well behaved’ data set.
8.3.4 Comparisons
Having identified that the most accurate data appears to be table 8.4, we now combine the
individual results from which these averages were calculated to obtain estimates, one from
each of the ten data sets, of K1 and K2 and the errors on these estimates. For example, from
the first data set, the optimum values of K1 are 145.6, 144.0, 145.3 and 144.9 kms-1 from

67
orders 18 to 15 respectively. This gives a mean value of 145.0 with the error on the mean,
0.3. The full set of estimates are given in table 8.6., together with the average of and scatter
in these estimates.

68
Data set K1 (kms-1) σ1 (kms-1) K 2 (kms-1) σ2 (kms-1)1 145.0 0.3 145.6 0.62 145.0 0.3 145.3 1.33 145.6 0.4 147.0 1.34 144.5 0.2 146.3 0.75 145.4 0.3 145.9 0.96 144.7 0.2 146.1 0.87 145.4 0.3 147.4 1.48 145.4 0.2 145.6 0.49 145.4 0.5 146.5 0.610 145.1 0.3 145.8 0.6
<K> 145.2 146.2σn-1 000.4 000.7
Table 8.6 Results obtained by disentangling four orders of theechelle spectrum separately and then finding their mean (Ki) andthe error on the mean (σi). σn-1 as given is the populationstandard deviation of the means, i.e. it measures the scatterbetween data sets.
As can be seen, the error estimates obtained by considering the scatter between
measurements from different orders of the same data set are comparable with the scatter
between different data sets. This method can therefore be taken as an unbiased estimate of
the real uncertainty in the method. Furthermore, if we compare these results obtained by
disentangling the whole spectrum at once, we see that little accuracy has been lost by
splitting the spectrum up. We have however both avoided the problem of trying to rectify
the spectrum reliably and obtained a method of estimating the uncertainty from a single data
set. Unlike curvature analysis methods, this does not underestimate the errors involved.

69
9. Effects of distortion and proximity
All of the stars under consideration are close binaries; they are detached, but in some cases
not by very much. Average radii as fractions of the semi-major axis range from 0.08 in the
case of NSV 5783 B to 0.37 for LZ Cen B. Under these circumstances the stars can be
expected to be deformed into non-spherical shapes described by Roche geometry with
significant irradiation from the companion. As a worst case illustration, we show in fig. 9.1
the extent to which the components of LZ Cen fill their Roche lobes. Similar illustrations for
all the stars are shown in Appendix IV. We finish this work by examining the effects that
distortion and irradiation may have on disentangling.
The scale of such effects can be characterised by considering the variation of properties, such
an surface brightness and effective temperature between three extreme positions - the pole
and the points nearest to and furthest from the companion; based on these estimates, we will
be in a position to judge whether such effects will be significant enough to require a more
thorough analysis.
A B
L1Back
Pole
Point

70
Fig. 9.1 Illustration of positions of the surfaces of the components of LZ Cen in relation to theirRoche lobes and L1, the inner Lagrangian point.
There are two major contributions to non-uniformities in brightness across the stellar surface.
Firstly and usually most important in systems of two similar stars, is the gravity darkening.
The local normal field strength, determined by the gradient of the potential (which must
include effects of rotation in the non-inertial frame in which the stars are at rest) will vary
over the surface of the star; it will be weakest at the point closest to the other star and
strongest at the pole. The intensity of radiation emitted from the surface will depend on this
field strength.
Secondly, there will be a reflection effect as light from one star impacts the nearer surface of
the other star. In radiative equilibrium, all of this light must be reradiated, again leading to
an increase in intensity. These effects are addressed in detail by Kopal (1959). An
alternative approach, will be used here to achieve an approximate estimate of the scale of the
effects.
9.1 Preliminary estimates
9.1.1 Gravity darkening
We will take as our starting point the equation defining the effective potential, ψ, in the
frame in which the stars are at rest with respect to each other (Kopal, 1959),
ψ ω= + + −+
+
GM
r
GM
rx
M R
M My
'
'
'
'
1
22
2
2 (9-1)
where ω is the angular velocity, M and M’ are the primary and secondary masses and other
terms are illustrated in fig. 9.2. This assumes circular orbits, full synchronisation and that the
stars are sufficiently centrally condensed to be treated as point masses. Both of the latter are
highly likely for stars close enough to experience significant distortion.

71
We write x R= ξ , z R= ς , µ =+M
M M
'
' and differentiate the potential along the x and z
axes to obtain,
( ) ( )gGM
R
GM
RRx = − +
−+ −
ξ ξω ξ µ2 2 2 2
2
1
'(9-2)
and
( )g
GM
R
GM R
Rz = − −
+ς
ς
ς2 2
3 23
21
'(9-3)
Fig. 9.2 Illustration of the geometry of the Roche potentials.
For a given system, G, M, M’, R, ω and µ can readily be evaluated and so g can be
determined for given relative position ξ on the x-axis or ζ on the z-axis using (9-2,3). In the
most severely distorted star under consideration, LZ Cen, relative radii as given by Vaz et al.
(1995) are given is table 9.1. Using these radii, we find the effective fields, also given in
table 9.1. We find a variation in log g by as much as 0.59 for the most distorted component.
Relative radius Log g(cgs) H4000
Pole 0.3245 ± 0.0013 3.77 1.08LZ Cen A Point 0.3860 ± 0.0028 3.39 0.77
Back 0.3606 ± 0.0018 3.59 0.90Pole 0.3477 ± 0.0021 3.74 1.09
LZ Cen B Point 0.4427 ± 0.0062 3.15 0.68Back 0.3956 ± 0.0028 3.53 0.88
Table 9.1: The effects of gravity darkening on the components of LZ Cen

72
This variation in log g will have three effects. Firstly, the line widths will be affected
directly by a variation in log g. Secondly, variation in g leads to variations in the surface
intensity and hence in the effective temperature. These may also lead to variations in the
spectral lines. Finally, the variation in surface intensity will lead to variations in the
luminosity ratio as we alternately see the back of one star and the point of the other. It
should be emphasised that this is not the well known ellipsoidal variation; that is symmetric
between the two components, so does not affect their luminosity ratio. This effect models
the difference in depth between the two minima of the component ellipsoidal curves, which is
anti-symmetric between the components.
According to von Zeipel’s Theorem, the variations in surface brightness for a star in radiative
equilibrium (a good assumption near the surface of B-type stars) are directly proportional to
the variations in the gradient of the effective potential, i.e. to g as determined above. This
leads to surface brightness variations (Kopal, 1959) of,
H
H
b g
gλ
λ ,
...0 0
14
1= + −
+ (9-4)
to first order, wherebT
B
dB
dTe
hc
kThc
kT
= =−
−
1
1 λλ
and B is the Planck function.
For temperature 26000 K, wavelength 4000 Å, we find b to be 1.85. We thus obtain the
variations is surface brightness (relative to H0) as given in table 9.1. Of the assumptions used
in deriving these results, the weakest will be the assumption of a black body spectrum. For
early-type stars, we can expect that the Balmer discontinuity at 3647 Å to significantly distort
the spectrum. Energy will be strongly absorbed below this wavelength and redistributed into
other parts of the spectrum, including the region around 4000 Å. We might expect then that
increasing the temperature will have more effect on the region under study, as energy is
redistributed from Balmer continuum absorption. Given the very approximate nature of this
treatment, however, we will neglect this (probably small) increase.

73
9.1.2 Reflection effects
We will not use full calculations of the amount of reflection expected. Instead we will be
satisfied by estimating the intensity incident on the surface of the star (specifically, the point
nearest the companion.) We assume that the star which is the source of irradiation can be
treated as a point source emitting isotropically and that the reflecting star is spherical. We
then find an especially simple solution. Let the stars have effective temperatures, T1,2, mean
fractional radii, r1,2 and distance from point to the centre of the other star, (1-r1,2). Let H1,2 be
the mean surface intensity of the stars and H’1,2 the contribution due to reflection by the other
star. We expect for LZ Cen,
( )H
H
r
r
T
T
'.1
1
22
1
224
14
10 31=
−= (9-5)
and ( )H
H
r
r
T
T
'.2
2
12
2
214
24
10 29=
−= (9-6)
We then obtain variations in surface brightness at 4000 Å of,
H
H
b H
Hλ
λ ,
'...
0
14
= +
+ (9-7)
where b is as defined above. This evaluates to 1.14 for the primary and 1.13 for the
secondary.
9.2 Variations in luminosity ratio
The most straightforward effect of distortion to model is a variation in the light ratio used to
combine the two component spectra. We begin with a simple approach based on the
variations found in §9.1 and investigate the sensitivity of disentangling to such variations.

74
9.2.1 Simple approach
Since the situation is symmetrical between the two points of quadrature, we would only
expect a variation between conjunctions. This will then depend principally on the difference
between the brightnesses of the point and back of the star.
We first consider gravity darkening, using the results from table 9.1. In this case, the
maximum luminosity ratio would occur for phase 0.25, when we would see the hotter back of
the secondary and the cooler point of the primary;
L
L
L
L
L
Lobs
2
1
2
1
2
1 0
088
0 77114
= =
,max
.
.. (9-8)
Conversely, at phase 0.75,
L
L
L
L
L
Lobs
2
1
2
1
2
1 0
0 68
0 900 76
= =
,min
.
.. (9-9)
We thus deduce an average amplitude of variation for the gravity darkening effect of 19%.
The true variation in brightness averaged over the disc would, of course, be less than this.
Considering reflection alone, we would see the highest light ratio when we see the point of
the secondary and the back of the primary, since the point of each star would be brighter than
the back As shown in §9.1.2, in the spectral region under consideration, the reflected
brightness at the point is 0.13-0.14 of the average brightness. This means that the point is 13-
14% brighter than the back. If we assumed that the whole side of the star facing the
companion was as bright as this, then when we look towards the point of the primary (phase
0.25 relative to periastron for a circular orbit), the luminosity ratio would be,
L
L
L
L
L
Lobs
2
1
2
1
2
1 0114
088
= =
,min.
. (9-10)

75
and when we look towards the point of the secondary (phase 0.75) we would observe the
luminosity ratio to be,
L
L
L
L
L
Lobs
2
1
2
1
2
1 0
113113
= =
,max
.. (9-11)
Again, averaging over the disk will reduce the variation, so what we have estimated in both
cases is an upper limit. We can thus be confident that the actual variation will not be greater
than about 20%. Furthermore, since the two effects work against each other, it is likely that
the true variation is very much less than this; we cannot be sure of this, however.
This variation was modelled by allowing the light ratio used is producing the synthetic
spectra to vary sinusoidally with the orbital period, about its mean value and with an
amplitude of ±20%. These spectra were then disentangled and compared with the reference
set used in §§7.2,3. All sets contain twenty spectra, excluding eclipse phases and assume a
10 minute exposure. The results are summarised in table 9.2.
K 1
(kms-1)σ1
(kms-1)K 2
(kms-1)σ2
(kms-1)Reference 222.7 0.5 205.3 0.8Variable light ratio 223.4 1.9 204.6 1.6
Table 9.2 Effect of a light ratio variation of ±20% on theresults of disentangling.
As can be seen, the effects of allowing the light ratio to vary are not necessarily negligible,
and lead, in this case, to double the uncertainty in the results. Fortunately, there does not
seem to be any systematic bias, such as might be possible given that the spectra are varying in
a phase dependant way. This effect clearly needs more thorough analysis. A 20% variation
is probably a gross overestimate, so a more careful treatment of the problem will now be
taken in an effort to reduce the limits on the variation.
9.2.2 A more careful analysis
Rather than just comparing two points, we now attempt to average over the visible disk of a
star from two angles - looking directly at the point, and directly at the back. We treat the

76
stars as spherical except in that distortion must be considered to determine how the surface
gravity varies over the surface of the star. Reflection effects assume that the irradiating
companion is a point source radiating isotropically. We work in spherical polar co-ordinates,
and consider an area element,
dA r d d= 2 sinθ θ φ (9-12)
where r is the mean relative radius. This element is illustrated in fig. 9.3.
The surface gravity at this point, g, assumed normal to the surface, is found numerically as
the gradient of the Roche potential, (9-1), in direction θ, φ at the surface of the star. The
intrinsic brightness of the element is proportional to g, so if g is the mean surface gravity by
area, then the intrinsic flux is,
FL
r
g
gi = 124π
(9-13)
Fig. 9.3 Surface area element of star A, shown with respect to the centres of stars A and B andthe observer.
In radiative equilibrium, all energy incident on a surface element from the companion must
be reradiated by that element, so that the contribution to the flux due to reflection is,
FL
rr = 224π
β'
cos (9-14)

77
where r’ is the distance to centre of the companion and β is the angle between the normal to
the surface and the line to the centre of the companion. Note that there will only be
reflection from surface elements that not obscured from the companion.
We can now calculate the total flux from an area element and hence its effective temperature
by,
σT F Fe i r4 = + (9-15)
We assume a black body spectrum to relate the effective temperature to the surface
brightness in the spectral region of interest and limb darkening of the form,
H
Hu u
'cos= − +1 α (9-16)
where u is the limb darkening coefficient, ~0.65 for the stars and wavelengths we are
considering and α is the angle between the normal and the line of sight. After applying this
correction to the surface brightness, we then integrate over all projected elements on the face
of the star nearest to us to find the total light coming from that face.
We can now proceed to use this model to make more convincing predictions about how the
luminosity ratio will vary over an orbital cycle. We find that the variation between the two
extremes is dominated by the reflection effect. This arises because reflection naturally leads
to a variation between the point and back of the star, whereas gravity darkening produces a
variation between the poles and the tidal bulges (i.e., the point and the back). A variation
between the point and back is thus, in some sense, a second order effect. For LZ Cen B, the
most distorted star in the sample, gravity darkening alone makes the side facing the
companion 1.5% less bright than the opposite side, whilst reflection alone makes this side
7.7% brighter. The overall effect is that the near side is 6.5% brighter. For LZ Cen A, the
near side is 7.6% brighter - as it is less bright than its companion, reflection is relatively more
important. For convenience, we calculate luminosity ratios relative to the ‘luminosity’ of the

78
back face, LB. By the same approach as was used in (9-10) and (9-11), we deduce the
variation in luminosity ratio to be,
L
L
L
L
L
Lobs
2
1
2
1
2
1 01076
0 929
= =
,min.
. (9-17)
L
L
L
L
L
Lobs
2
1
2
1
2
1 0
10651065
= =
,max
.. (9-18)
The amplitude of variation is thus 6.8%. This can be expected to be a more realistic estimate
than those obtained in §9.2 as we have averaged over the whole disc, not just considered the
extremes of variation. The amplitudes for the other systems in the sample are listed in table
9.3. As can be seen, only for LZ Cen, DW Car and AC Vel are the variations expected to be
more than 5%, and for no systems are they more than 10%.
Amplitude (%)DW Car 5.5GL Car 2.2LZ Cen 6.8V346 Cen 1.5AC Vel 6.5NSV 5783 0.3
Table 9.3 The amplitude ofluminosity ratio variations tobe expected.
Once the observing run had been carried out, it became clear that LZ Cen, for which only a
few spectra had been obtained, was unlikely to be suitable for accurate analysis. We thus
determined the effect of the variations for DW Car and AC Vel only, using the actual
observed phases and a sinusoidal variation in the light ratio of amplitudes as given in table
9.3. The results are shown in table 9.4, together with the results of a reference data set with
no variation in the light ratio.
K 1
(kms-1)σ1
(kms-1)K 2
(kms-1)σ2
(kms-1)DW Car, reference 262.2 1.3 278.4 1.6DW Car, variable light ratio 262.0 1.6 278.0 1.4AC Vel, reference 145.0 0.2 145.9 0.4AC Vel, variable light ratio 145.1 0.3 145.9 0.4
Table 9.4 The effects of realistic variations in the light ratio on theresults of disentangling.

79
Varying the light ratio by realistic amounts may make a small increase in the uncertainties in
K1 and K2, but it is not large enough to be significant. We are thus justified in neglecting its
effect in analysing the spectra.
9.3 Spectral variations
As was alluded to above, we can also expect that the shape of the spectra will vary across the
visible part of the disk at any given time. We expect variations both in line strength and
width due to the variation in surface gravity and temperature, and the actual spectrum will be
a composite of contributions from the different areas of the disk. Whilst it might be fruitful
to investigate the sensitivity of the disentangling technique to these variations, the complexity
of the problem defies treatment here. Throughout this work, we have taken the component
spectra as given, based on the model atmosphere spectra we began with. To extend the
model to use varying spectra is beyond the scope of this thesis. That such effects might be of
significance is also suggested by Sturm and Simon (1994) in the context of the O-type
system, DH Cephei. They point out that the extreme sensitivity of some NIII lines to
variations in effective temperature and gravity may lead to the lines varying with phase and
that this may explain the poor results they obtain from one spectral range.

80
10. Discussion and conclusions
In this work we have made extensive use of synthetic binary spectra to test the disentangling
technique. These have proved to be a very powerful tool for several reasons. Firstly,
because the spectra were, so to speak, made to order, we know the parameters that were used
to construct them, and so we can check that we get the same parameters out at the end. This
allows us to detect systematic errors in the deduced parameters, or in this case, show that
such errors are not usually present. Secondly, by being able to construct multiple data sets
and analyse them in parallel, we are able to identify the real scatter of the results about the
true values. This is an extremely robust technique, involving minimal assumptions, which
allows us to make realistic estimates of the errors involved. The only assumptions that are
questionable in this approach are that the synthetic spectra are a good representation of the
real spectra. Among the reasons why this might not be valid are that the noise in the spectra
may not be pure Poisson noise, and that the spectra may have been poorly rectified. The first
question has been investigated by Maxted (1996a). We have shown here that the
disentangling is insensitive to several models of rectification error at plausible levels. One
value of being able to test the technique using such a robust indicator of errors is that it
provides a standard against which other methods of error estimation may be compared. We
find that techniques based on measuring the curvature of the residual surface in the vicinity
of the maximum are not reliable for this problem and can lead to underestimates of the errors
by as much as a factor of three. It is our conclusion that, at our present level of
understanding of disentangling, only methods which estimate errors by explicitly looking at
the scatter in several measurements, for example from different spectral ranges, can be
considered to give reliable errors.
Disentangling itself has been shown to be a very powerful technique, principally in its ability
to extract component spectra well given even rather poor system parameters. It can also be

81
used to optimise these parameters, but this should be done with considerable caution. This is
done by repeating the disentangling process many times for different parameters and seeking
to minimise the residuum to the fit. We find that the position of the minimum does give
unbiased estimates of the parameters. Beyond this, however, the surfaces are poorly
understood and we cannot confidently draw any conclusions from the shape of the surface
away from the minimum. This is illustrated by the existence of considerable unexplained
structure away from the minimum and the poor correlation between the curvature of the
surface and the uncertainty in our estimates. A possible explanation for the latter is that
curvature analysis is rooted in the theory of χ2 model fitting. Although that may seem to be
what we are doing here, there is a subtle difference. Standard model fitting involves
constructing a model given one or more parameters and then looking at how well that model
fits the observed data. The model itself is not a function of the data. In disentangling
however, for each set of parameters, we find the pair of component spectra that provides the
best fit to the data. We then compare the quality of fit obtained between different sets of
parameters. We are now using a model that itself depends on the data. This is not standard
model fitting, and so we cannot take for granted that the results derived from this theory, such
as using the curvature of the χ2 surface as an indication of the uncertainty in the estimated
parameters, are applicable in this case.
The problem is not simply that we are using different component spectra for each point on
the surface. This can be avoided by determining a single pair of component spectra at the
minimum and then using these as our (fixed) model to calculate residuals elsewhere.
Because these spectra cannot be better fits for a given set of parameters than spectra
optimised for these parameters, however, this surface cannot be shallower than that obtained
by disentangling each point separately. These means that the surfaces produced in this work
are, in some sense, the shallowest possible surfaces and so fixing the spectra can only give
smaller, and even less realistic errors. This prediction has been confirmed in tests.

82
Furthermore, since disentangling produces the shallowest surface, we should also ask how
appropriate it is to use it for optimising at all.
The difficulty with curvature analysis then is that the model used to fit the data is itself
derived from the data. Put like this, it is not surprising that errors estimated using model
fitting theory are too small. As to how to proceed, several possibilities suggest themselves.
It may be that simply smoothing the component spectra before calculating the residuals will
improve matters. Alternatively, if the spectra were analysed in two batches, we could use the
component spectra derived from one batch as our ‘model’ for the other. This eliminates the
dependence of the model on the specific data it is being used to fit and may resolve the
problem.
In conclusion, disentangling has been proven to reconstruct component spectra well and as
such is a powerful technique in spectral analysis. As a tool for determining system
parameters, it is philosophically appealing as it involves fitting only two free parameters - the
velocity semi-amplitudes - unlike cross-correlation techniques which yield two velocities for
each phase point. Its practical value, however, remains uncertain in view of the poor
understanding of exactly how these parameters are optimised. Until these questions are
resolved and the nature of the residual surface is fully understood any work using the
technique should be supported by the use of synthetic data sets. As has been found in this
work, these provide the only reliable way to judge the significance of the results obtained.

83
Acknowledgements
I would like to take this opportunity to thank several people who have made this work
possible. The initial grid of model atmosphere spectra were kindly produced by Dr. C.S.
Jeffery specifically for this work. Thanks are also due to Dr. K.P. Simon for making the
spectra of DH Cephei available for comparison. The progress of the disentangling work was
aided immeasurably by being given access to Dr. C.A. Haswell’s workstation. I also should
acknowledge helpful discussion with Dr. R.C. Smith on some of the contents of chapter 9
and with Dr. M.A. Hendry with regard to the principles of model fitting. Finally, of course,
I would never have got anywhere without innumerable helpful discussions, ideas, assistance
and grammatical corrections from Pierre in his role as my supervisor!
This research has made use of the Simbad database, operated at CDS, Strasbourg, France.

84
Appendix I: Response curves for the DFOSC instrumentation
DFOSC optics
0.0
0.2
0.4
0.6
0.8
1.0
3500 4000 4500 5000 5500
Wavelength / Å
Tra
nsm
issi
on
Grisms #6 and #7
0.0
0.2
0.4
0.6
0.8
1.0
3500 4000 4500 5000 5500
Wavelength / Å
Tra
nsm
issi
on
Grism #7Grism #6

85
Grism #9
2019 18 17 16 15 14
13
0.0
0.2
0.4
0.6
0.8
1.0
3500 4000 4500 5000 5500
Wavelength / Å
Tra
nsm
issi
on
Grism #10
0.0
0.2
0.4
0.6
0.8
1.0
3500 4000 4500 5000 5500
Wavelength / Å
Tra
nsm
issi
on

86
Ford-Loral 2048×2048 CCD
0.0
0.2
0.4
0.6
0.8
1.0
3500 4000 4500 5000 5500
Wavelength / Å
Effi
cien
cy

87
Appendix II: Noise-free, synthetic spectra of the components
(a) Overall views
DW Car Primary
DW Car Secondary

88
GL Car Primary
GL Car Secondary

89
LZ Cen Primary
LZ Cen Secondary

90
V346 Cen Primary
V346 Cen Secondary

91
AC Vel Primary
AC Vel Secondary

92
NSV 5783 Primary
NSV 5783 Secondary

93
(b) Detailed spectrum of GL Car A
HeI
(4144)
HeI
(4121)
SiIV(4116)
Hδ
CIII +OII
(4070)
HeI
(4026)
SiIV(4089)
HeI
(4009)
Hε
HζHη
CII
(4267)
HeI
(4387)
Hγ
HeI
(4471)
MgII
(4481)SiIII
(4552-68-75)

94
Hβ
HeI
(4713)
HeII
(4686)CIII+OII
(4650)
HeI
(4922)

95
Appendix III: Radial velocity and light curves
DW Car Radial Velocity Curve
-300
-200
-100
0
100
200
300
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Phase
Vel
ocity
/ km
/s
Primary
Secondary
DW Car Light Curve
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Phase
Rel
ativ
e M
agni
tude

96
GL Car Radial Velocity Curve
-300
-200
-100
0
100
200
300
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Phase
Vel
ocity
/ km
/s
Primary
Secondary
GL Car Light Curve
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Phase
Rel
ativ
e M
agni
tude

97
LZ Cen Radial Velocity Curve
-300
-200
-100
0
100
200
300
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Phase
Vel
ocity
/ km
/s
Primary Secondary
LZ Cen Light Curve
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Phase
Rel
ativ
e M
agni
tude

98
V346 Cen Radial Velocity Curve
-300
-200
-100
0
100
200
300
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Phase
Vel
ocity
/ km
/s
Primary
Secondary
V346 Cen Light Curve
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Phase
Rel
ativ
e M
agni
tude

99
AC Vel Radial Velocity Curve
-300
-200
-100
0
100
200
300
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Phase
Vel
ocity
/ km
/s
Primary Secondary
AC Vel Light Curve
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Phase
Rel
ativ
e M
agni
tude

100
NSV 5783 Radial Velocity Curve
-300
-200
-100
0
100
200
300
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Phase
Vel
ocity
/ km
/s
Primary
Secondary
NSV 5783 Light Curve
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Phase
Rel
ativ
e M
agni
tude

101
Appendix IV: Roche lobe filling of the stars
DW Car
GL Car

102
LZ Cen
V346 Cen

103
AC Vel
NSV 5783

104
References
Anderson, J.: 1991a, Astron. Astrophys. Rev. 3, 91
Anderson, J.: 1991b, Accurate Physical Properties of Normal Stars: Determination and
Applications, H.C.Ø. Tryk, Univ. of Copenhagen
Anderson, M.: 1996, URL: http://www.astro.ku.dk/~michael/daninst.html
Bagnuolo, W.G., Gies, D.R.: 1991, Astrophys. J. 376, 266
Benn, C.: 1996, URL: http://www.ast.cam.ac.uk/%7elpinfo/lpinst.html
Benn, C.: 1992, Gemini 35, 20
Böhm-Vitense, E.: 1989, Introduction to Stellar Astrophysics, Vol. I, Cambridge Univ. Press,
Cambridge
Carter, D., Sharan, U., Clegg, R.E.S.: 1994, ING Observer’s Guide, Isaac Newton Group, La
Palma
Clausen, J.V.: 1995, Priv. Comm.
Deutschmann, W.A., Davis, R.J., Schild, R.E.: 1976, Astrophys. J. Suppl. Ser. 30, 97
Duffett-Smith, P.: 1981, Practical Astronomy with your Calculator, Cambridge Univ. Press,
Cambridge
Froberg, C.E.: 1969, Introduction to Numerical Analysis. 2nd Edn., Addison-Wesley
Giménez, A., Clausen, J.V.: 1986, Astron. Astrophys. 161, 275
Giménez, A., Clausen, J.V., Anderson, J.: 1986, Astron. Astrophys. 160, 310
Giménez, A., Clausen, J.V., Guinan. E.F., Maloney, F.P., Bedstreet, D.H., Storm, J., Tobin,
W.: 1994, Exp. Astron. 5, 181
Hamuy, M., Walker, A.R., Suntzeff, N.B., Gigoux, P., Heathcote, S.R., Phillips, M.M.: 1992,
Publ. Astron. Soc. Pacific 104, 533

105
Heintz, W.D.: 1978, Double Stars, Reidel, Dordrecht
Hilditch, R.W., Bell, S.A.: 1987, Monthly Notices Roy. Astron. Soc. 229, 529
Hill, G., Holmgren, D.E.: 1995, Astron. Astrophys. 297, 127
Kholopov, P.N. (Ed.): 1985, General Catalogue of Variable Stars, 4th Edn., Moscow
Kopal, Z.: 1959, Close Binary Systems, Chapman and Hall, London
Kurucz, R.L.: 1991, in Precision Photometry: Astrophysics of the Galaxy, Eds. A.G.D.
Philip, A.R. Upgren, K.A. Jones, L. Davis Press, Schenectady, New York
Maxted, P.F.L.: 1995, Priv. Comm.
Maxted, P.F.L.: 1996a, accepted for publication in Astron. Astrophys.
Maxted, P.F.L.: 1996b, Priv. Comm.
Maxted, P.F.L., Hill, G., Hilditch, R.W.: 1994, Astron. Astrophys. 285, 535
Moore, C.E.: 1972, A Multiplet Table of Astrophysical Interest, National Bureau of
Standards, Washington
Nicolet, B.: 1979, Astron. Astrophys. Suppl. Ser. 34, 1
Pence, W.D.: 1995, FITSIO User’s Guide - A Subroutine Interface to FITS Format Files,
HEASARC
Popper, D.M.: 1980, Ann. Rev. Astron. Astrophys 18, 115
Popper, D.M.: 1981, Astrophys. J. Suppl. Ser. 47, 339
Popper, D.M., Hill, G.: 1991, Astron. J. 101, 600
Press, W.H., Teukolsky, S.A., Vetterling, W.T., Flannery, B.P.: 1992, Numerical Recipes in
FORTRAN, 2nd Edn., Cambridge Univ. Press, Cambridge
Schwarz, H.E., Melnick, J. (Eds.): 1993, ESO User’s Manual, European Southern
Observatory

106
Simkin, S.M.: 1974, Astron. Astrophys. 31, 129
Simon, K.P., Sturm, E.: 1994, Astron. Astrophys. 281, 286
Simon, K.P., Sturm, E., Fiedler, A.: 1994, Astron. Astrophys. 292, 507
Storm, J.: 1996, DFOSC Tests Dec. 1995 and Jan. 1996, ESO Memo.
Sturm, E., Simon, K.P.: 1994, Astron. Astrophys. 282, 93
Tonry, J., Davis, M.: 1979, Astron. J. 84, 1511
Vaz, L.P.R., Anderson, J., Rabello-Soares, M.C.A.: 1995, Astron. Astrophys. 301, 693
Walborn, N.R., Fitzpatrick, E.L.: 1990, Publ. Astron. Soc. Pacific 102, 379
Wells, D.C., Greisen, E.W., Harten, R.H.: 1981, Astron. Astrophys. Suppl. Ser. 44, 363
Whipple, F.L. (Ed.): 1966, Smithsonian Astrophysical Observatory Star Catalog,
Washington
Wolf, G.W., Kern, J.T.: 1983, Astrophys. J. Suppl. Ser. 52, 429
Zucker, S., Mazeh, T.: 1994, Astrophys. J. 420, 806