SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE … · In the present paper we study the geodesic...
51
SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 DIETER MAYER AND FREDRIK STRÖMBERG ABSTRACT. In this paper we discuss a coding and the associated symbolic dynamics for the geodesic flow on Hecke triangle surfaces. We construct an explicit cross section for which the first return map factors through a simple (explicit) map given in terms of the generating map of a particular continued fraction expansion closely related to the Hecke triangle groups. We also obtain explicit expressions for the associated first return times. CONTENTS 1. Introduction 2 1.1. Hyperbolic geometry and Hecke triangle surfaces 2 2. The geodesic flow on T 1 M 4 3. λ -Continued Fraction Expansions 5 3.1. Basic concepts 5 3.2. Regular λ -fractions 6 3.3. Dual regular λ -fractions 15 3.4. Symbolic dynamics and natural extensions 19 3.5. Markov partitions for the generating map F q 20 3.6. Reduction of λ -fractions 22 3.7. Geodesics and geodesic arcs 25 3.8. Reduced geodesics 27 4. Construction of the cross-section 28 4.1. The cross section 28 4.2. Geometric lemmas 31 4.3. The first return map 36 4.4. The first return time 40 5. Construction of an invariant measure 42 5.1. q = 3 43 5.2. Even q ≥ 4 43 5.3. Odd q ≥ 5 44 5.4. Invariant measure for F q 44 6. Lemmas on continued fraction expansions and reduced geodesics 45 References 49 This work has been supported by the German Science Foundation under contract Ma 633/16-1. 1
Transcript of SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE … · In the present paper we study the geodesic...

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKESURFACES 2008–8–26
DIETER MAYER AND FREDRIK STRÖMBERG
ABSTRACT. In this paper we discuss a coding and the associated symbolic dynamics forthe geodesic flow on Hecke triangle surfaces. We construct an explicit cross section forwhich the first return map factors through a simple (explicit) map given in terms of thegenerating map of a particular continued fraction expansion closely related to the Hecketriangle groups. We also obtain explicit expressions for the associated first return times.
CONTENTS
1. Introduction 21.1. Hyperbolic geometry and Hecke triangle surfaces 22. The geodesic flow on T 1M 43. λ -Continued Fraction Expansions 53.1. Basic concepts 53.2. Regular λ -fractions 63.3. Dual regular λ -fractions 153.4. Symbolic dynamics and natural extensions 193.5. Markov partitions for the generating map Fq 203.6. Reduction of λ -fractions 223.7. Geodesics and geodesic arcs 253.8. Reduced geodesics 274. Construction of the cross-section 284.1. The cross section 284.2. Geometric lemmas 314.3. The first return map 364.4. The first return time 405. Construction of an invariant measure 425.1. q = 3 435.2. Even q ≥ 4 435.3. Odd q ≥ 5 445.4. Invariant measure for Fq 446. Lemmas on continued fraction expansions and reduced geodesics 45References 49
This work has been supported by the German Science Foundation under contract Ma 633/16-1.1

2 D. MAYER AND F. STRÖMBERG
1. INTRODUCTION
Surfaces of negative curvature and their geodesics have been studied since the 1898 workof Hadamard [15] (see in particular the remark at the end of §58). Inspired by the workof Hadamard and Birkhoff [6] Morse [31] introduced a coding of geodesics essentiallycorresponding to what is now known as „cutting sequences“ and used this coding to showthe existence of a certain type of recurrent geodesics [32].
Further ergodic properties of the geodesic flow on surfaces of constant negative curvaturegiven by Fuchsian groups were shown by e.g. Artin [5], Nielsen [36], Koebe [26], Löbell[29], Myrberg [33], Hedlund [16, 17, 18, 19], Morse and Hedlund [30] and Hopf [20, 21].In this sequence of papers one can see the subject of symbolic dynamics emerging. Fora more up-to-date account of the ergodic properties of the geodesic flow on a surface ofconstant negative curvature formulated in a modern language see e.g. the introduction inSeries [47].
Artin’s [5] approach was novel in that he used continued fractions to code geodesics onthe modular surface. After Artin, coding and symbolic dynamics on the modular surfacehave been studied by e.g. Adler and Flatto [1, 2, 3] and Series [48]. For a recent reviewof different aspects of coding of geodesics on the modular surface see for example theexpository papers by Katok and Ugarcovici [24, 25].
Other important references for the theory of symbolic dynamics and coding of the geodesicflow on hyperbolic surfaces are e.g. Adler-Flatto [4], Bowen and Series [7] and Series [47].
In the present paper we study the geodesic flow on a family of hyperbolic surfaces withone cusp and two marked points, the so-called Hecke triangle surfaces, generalizing themodular surface. Symbolic dynamics for a related billiard has also been studied by Fried[12]. We now give a summary of the paper. Sections 1 and 2 contain preliminary factsabout hyperbolic geometry and geodesic flows. In Section 3 we develop the theory ofλ -fractions connected to the coding of the geodesic flow on the Hecke triangle surfaces.The explicit discretization of the geodesic flow in terms of a Poincaré section and Poincarémap is developed in Section 4. As an immediate application we derive invariant measuresfor certain interval maps in Section 5. Some rather technical lemmas are confined to theend in Section 6.
1.1. Hyperbolic geometry and Hecke triangle surfaces
Recall that any hyperbolic surface of constant negative curvature −1 is given as a quotient(orbifold) M = H /Γ. Here H = z = x+ iy |y > 0, x ∈ R together with the metric ds =|dz|
y is the hyperbolic upper half-plane and Γ ⊆ PSL2(R) ∼= SL2(R)/±I is a Fuchsiangroup. Here SL2(R) is the group of real two-by-two matrices with determinant 1, I =
(1 00 1
)and PSL2(R) is the group of orientation preserving isometries of H . The boundary of H

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 3
is ∂H = R∗ = R∪∞ , H ∗ = H ∪∂H . If g =(
a bc d
)∈ PSL2(R) then gz = az+b
cz+d ∈Hfor z ∈ H , gx ∈ ∂H for x ∈ ∂H and we say that g is elliptic, hyperbolic or parabolicdepending on whether |Trg|= |a+d|< 2, > 2 or = 2. The same notation applies for fixedpoints of g. In the following we identify the elements g ∈ PSL2(R) with the map it defineson H ∗. Note that the type of fixed point is preserved under conjugation g 7→ AgA−1 byA ∈ PSL2(R). A parabolic fixed point is a degenerate fixed point, belongs to ∂H andis usually called a cusp. Elliptic points appear in pairs, z, z with z ∈ H and z ∈ H −–the lower half-plane and Γz, the stabilizer subgroup of z in Γ, is cyclic of finite order.Hyperbolic fixed points appear also in pairs with x,x∗ ∈ ∂H , where x∗ is said to be theconjugate point of x. A geodesics γ on H is either a half-circle orthogonal to R or aline parallel to the imaginary axis and the endpoints of γ are denoted by γ± ∈ ∂H . Weidentify the set of geodesics on H with G = (ξ ,η) |ξ 6= η ∈ R∗ and use γ (ξ ,η) todenote the oriented geodesic on H with γ+ = ξ and γ− = η . Unless otherwise stated allgeodesics are assumed to be parametrized with hyperbolic arc length with γ (0) either atheight 1 if γ is vertical or the highest point on the half-circle. The tangent of γ at γ (t)is denoted by γ (t). It is known that z ∈ H and θ ∈ [−π,π) ∼= S1 determine a uniquegeodesic (cf. Lemma 30) passing through z whose tangent at z makes an angle θ with thepositive real axis. This geodesic is denoted by γz,θ . It is also well known that a geodesicγ (ξ ,η) is closed if and only if ξ and η = ξ ∗ are conjugate hyperbolic fixed points.
The unit tangent bundle of H , T 1H =⊔
z∈H ~v ∈ TzH | |~v|= 1 is the collection ofall unit vectors in the tangent planes of H with base points z ∈ H which we denote byT 1
z H . By identifying~v with its angle θ with respect to the positive real axis we can viewT 1H as the collection of all pairs (z,θ) ∈H ×S1. We may also view this as the set ofgeodesics γz,θ on H or equivalently as G ⊆ R∗2. In fact, one can show that H ×S1 is atrivialization of T 1H .
Let π : H →M be the natural projection map, i.e. π (z) = Γz and let π∗ : T 1H →T 1Mbe the extension of π to T 1H . Then γ∗ = πγ is a closed geodesic on M if and only ifγ+ and γ− are fixed points of the same hyperbolic map gγ ∈ Γ. For a more comprehensiveintroduction to hyperbolic geometry and Fuchsian groups see e.g. [23, 27, 41].
Definition 1. For an integer q ≥ 3 the Hecke triangle group Gq ⊆ PSL2(R) is the group
generated by the maps S : z 7→−1z and T : z 7→ z+λ where λ = λq = 2cos
(π
q
)∈ [1,2). The
corresponding orbifold (Riemann surface) is Mq = Gq\H , which we sometimes identifywith the standard fundamental domain of Gq
Fq = z ∈H | |ℜz| ≤ λ/2, |z| ≥ 1
with sides pairwise identified. Let ρ = ρ+ = eπiq and ρ− = −ρ . We define the following
oriented boundary components of Fq: L0 is the circular arc from ρ− to ρ+. L1 is the

4 D. MAYER AND F. STRÖMBERG
vertical line from ρ+ to i∞ and L−1 is the vertical line from i∞ to ρ−. Thus ∂Fq =L−1∪L0∪L1 is the positively oriented boundary of Fq.
Remark 1. The group Gq is a realization of the Schwarz triangle group(
π
∞, π
q , π
2
)and it is
not hard to show (see e.g. [27, VII]) that Gq for q ≥ 3 is a co-finite Fuchsian group withfundamental domain Fq and the only relations
(1) S2 = (ST )q = Id – the identity in PSL2(R).
Hence Gq has one cusp, that is the equivalence class of parabolic points, and two ellipticequivalence classes of orders 2 and q respectively. Note that G3 = PSL2(Z) –the modulargroup and G4, G6 are conjugate to congruence subgroups of the modular group. Forq 6= 3,4,6 the group Gq is non-arithmetic (cf. [23, pp. 151-152]), but in the terminologyof [9, 46] it is semi-arithmetic, meaning that it is possible to embed Gq as a subgroup of aHilbert modular group.
2. THE GEODESIC FLOW ON T 1M
We briefly recall the notion of the geodesic flow on a Riemann surface M = Γ\H withΓ ⊂ PSL2(R) a Fuchsian group. To any (z,θ) ∈ T 1H ∼= H × S1 we can associate aunique geodesic γ = γz,θ on H such that γ (0) = z and γ (0) = eiθ . The geodesic flow onT 1H can then be viewed as a map Φt : T 1H → T 1H with Φt
(γz,θ)
= Φt (z,θ) =(γz,θ (t) , γz,θ (t)
), t ∈R satisfying Φt+s = Φt Φs. The geodesic flow Φ∗ on T 1M is then
given by the projection Φ∗t = π∗ (Φt).
A more abstract and general description of the geodesic flow, which can be extended toother homogeneous spaces, is obtained by the identification T 1H ∼= PSL2(R). Underthis representation the geodesic flow corresponds to right multiplication by the matrixa−1
t =(
et/2 00 e−t/2
)in PSL2(R) (cf. e.g. [11, Ch. 13]).
Definition 2. Let ϒ be a set of geodesics on H . A hypersurface Σ ⊆ T 1H is said tobe a Poincaré section or cross section for the geodesic flow on T 1H for ϒ if any γ ∈ ϒ
intersects Σ
(P1) transversally i.e. non-tangentially, and(P2) infinitely often, i.e. Φt j (γ) ∈ Σ for an infinite sequence of t j →±∞.
The corresponding first return map is the map T : Σ→ Σ such that T (z,θ) = Φt0 (z,θ) ∈Σ and Φt (z,θ) /∈ Σ for 0 < t < t0. Here t0 = t0 (z,θ) > 0 is called the first return time.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 5
Poincaré sections were first introduced by Poincaré [40] to show the stability of periodicorbits. For examples of cross section maps in connection with the geodesic flow on hyper-bolic surfaces see e.g. [4, 1].
The previous definition extend naturally to T 1M with ϒ and Σ replaced by ϒ∗ = π (ϒ)and Σ∗ = π∗ (Σ). The first return map T is used to obtain a discretization of the geodesicflow, e.g. we replace Φt (z,θ) by Φtk (z,θ) where tk (z,θ) is a sequence of consecutivefirst returns. Incidentally this provides a reduction of the dynamics from three to twodimensions and it turns out that in our example the first return map also has a factor map,which allows us to study the three dimensional geodesic flow with the help of an intervalmap (see Sections 4.3 and 5).
3. λ -CONTINUED FRACTION EXPANSIONS
3.1. Basic concepts
Continued fraction expansions connected to the groups Gq, the so-called λ -fractions, werefirst introduced by Rosen [42] and subsequently studied by Rosen and others, cf. e.g. [43,44, 45]. For the purposes of natural extensions (cf. Section 3.4) the results of Burton,Kraaikamp and Schmidt [8] are analogous to ours and we occasionally refer to their results.Our definition of λ -fractions is equivalent to Rosen’s definition (cf. e.g. [42, §2]).
To a sequence of integers, a0 ∈ Z and a j ∈ Z∗ = Z\0 , j ≥ 1 (finite or infinite) weassociate a λ -fraction x = Ja0;a1,a2, . . .K. This λ -fraction is identified with the point
x = a0λ − 1a1λ − 1
a2λ−. . .
= limn→∞
T a0ST a1 · · · ST an (0)
if the right hand side is convergent. When there is no risk of confusion, we sometimes writex = x. For any m≥ 1 we define the head x(m) and the tail x(m)of x by x(m) = Ja0;a1, . . . ,amKand x(m) = Jam+1,am+2, . . .K. Note that −x = J−a0;−a1,−a2, . . .K. If a0 = 0, we usuallyomit the leading J0;K. Repetitions in a sequence is denoted by a power, e.g. Ja,a,aK =Ja3K and an infinite repetition is denoted by an overline, e.g. Ja1, . . .ak,a1, . . . ,ak, . . .K =Ja1, . . . ,akK. Such a λ -fraction is said to be periodic with period k, an eventually periodicλ -fraction has a periodic tail. Two λ -fractions x and y are said to be equivalent if theyhave the same tail. In this case it is easy to see that, if the fractions are convergent, thenx = Ay for some A ∈ Gq.
The sole purpose for introducing λ -fractions is to code geodesics by identifying the λ -fractions of their endpoints with elements of ZN. For reasons that will be clear later

6 D. MAYER AND F. STRÖMBERG
(Section 3.4), we have to consider also bi-infinite sequences ZZ and view ZN as em-bedded in ZZ with a zero-sequence to the left. On ZZ and ZN we always use the met-ric h defined by h
(ai∞
i=−∞,bi∞
i=−∞
)= 1
1+n where ai = bi for |i| < n and an 6= bn ora−n 6= b−n. In this metric ZZ and ZN have the topological structure of a Cantor set and theleft- and right shift maps σ± : ZZ → ZZ, σ±a j
=
a j±1
are continuous. We also setσ+Ja1,a2, . . .K = Ja2,a3, . . .K.
3.2. Regular λ -fractions
In the set of all λ -fractions we choose a „good“ subset, in which almost all x ∈ R haveunique λ -fractions and in which infinite λ -fractions are convergent. The first step is tochoose a „fundamental region“ Iq for the action of T : R → R, namely Iq =
[−λ
2 , λ
2
].
Then it is possible to express one property of our „good“ subset as follows: If in thefraction x = Ja0;a1,a2, . . .K the first entry a0 = 0, then x ∈ Iq. That means, we do not allowsequences with a0 = 0 to correspond to points outside Iq.
A shift-invariant extension of this property leads to the following definition of regularλ -fractions:
Definition 3. Let x = Ja0;a1,a2, . . .K be a finite or infinite convergent λ -fraction and letx j = σ jx = J0;a j,a j+1, . . .K, j≥ 1, be the j-th shift of x. Let x j be the corresponding point.Then x is said to be a regular λ -fraction if and only if
(*) x j ∈ Iq, for all j ≥ 1.
A regular λ -fraction is denoted by[a0;a1, . . .
], the space of all regular λ -fractions is de-
noted by Aq and the subspace of infinite regular λ -fractions with a0 = 0 is denoted byA0,q.
For a finite fraction x = Ja0;a1, . . . ,anK we get x j = J0;K and x j = 0 ∈ Iq for j > n.
We will see later that regular λ -fractions can be regarded as nearest λ -multiple continuedfractions. In the case q = 3 or λ = 1, nearest integer continued fractions were studiedalready by Hurwitz [22] in 1889. An account of Hurwitz reduction theory can be found inFried [13] (cf. also the H-expansions in [24, 25]). For general q this particular formulationof Rosen’s fractions was studied by Nakada [35].
For the remainder of the paper we let h = q−32 if q is odd and h = q−2
2 if q is even. Thefollowing Lemma is an immediate consequence of [8, (4)].
Lemma 1. The points ∓λ
2 have finite regular λ -fractions given by
∓λ
2=
[(±1)h] , for qeven,[(±1)h ,±2,(±1)h] , for qodd.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 7
Lemma 2. If q is odd, the point x = 1 has the finite regular λ -fraction
1 =[1;1h] .
Proof. Since a =[1;1h]= T (ST )h (0) , one has also−a = T−1 (ST−1)h (0). From identity
(1) we get
Sa = (ST )h+1 0 =(T−1S
)h+20 = T−1 (ST−1)h
ST−1S0 = T−1 (ST−1)h0,
and hence −1/a =−a. Since a > 0, this implies that a = 1.
Definition 4. Let bxc be the floor function defined by bxc= n ⇔ n < x ≤ n+1 for x > 0,respectively n ≤ x < n+1 for x ≤ 0, and let 〈x〉λ =
⌊ xλ
+ 12
⌋be the corresponding nearest
λ -multiple function. Then define Fq : Iq → Iq by
Fqx =
−1
x −〈−1x 〉λ λ , x ∈ Iq\0 ,
0, x = 0.
Lemma 3. For x ∈ R the following algorithm gives a finite or infinite regular λ -fractioncq (x) =
[a0;a1, . . .
]corresponding to x:
(i) Set a0 := 〈x〉λ and x1 = x−a0λ .(ii) Set x j+1 := Fqx j =− 1
x j−a jλ , j ≥ 1, with a j = 〈−1
x j〉λ , j ≥ 1.
If x j = 0 for some j, the algorithm stops and gives a finite regular λ -fraction.
Proof. By definition we see that x j+1 = T−a jSx j, j ≥ 1, and hence x = T a0ST a1 · · · ST anxnfor any n ≥ 1. If x =
[a0;a1, . . . .
], then for j ≥ 1 x j = σ jx =
[0;a j, . . .
]corresponds to
the point x j and condition (*) of Definition 3 is fulfilled, since Fq maps Iq to itself andx1 ∈ Iq.
Remark 2. We say that Fq is a generating map for the regular λ -fractions. It is also clearfrom Lemma 3 that Fq acts as a shift map on the space A0,q, i.e. cq
(Fqx)
= σcq (x).
An immediate consequence of Lemma 3 is the following corollary:
Corollary 1. If x has an infinite regular λ -fraction, then it is unique and equal to cq (x) asgiven by Lemma 3.
The above choice of floor function implies that Fq is an odd function and that 〈±λ
2 〉λ = 0in agreement with Lemma 1. The ambiguity connected to the choice of floor function atintegers affects only the points x = 2
λ (1−2k) where −1xλ
+ 12 = k ∈ Z and Fqx = (k−bkc)λ −
λ
2 = ±λ
2 . By Lemma 1 we conclude, that any point, which has more than one regularλ -fraction, is Fq-equivalent to ±λ
2 and hence has a finite λ -fraction.

8 D. MAYER AND F. STRÖMBERG
We can produce in this way a regular λ -fraction cq (x) as a code for any x ∈ R. For thepurpose of symbolic dynamics we prefer to have an intrinsic description of the membersof the space A0,q formulated in terms of so-called forbidden blocks (or f.b. for short),i.e. certain subsequences which are not allowed. From Definition 3 it is clear, whichsubsequences are forbidden and how to remove them by rewriting the sequence, using thefraction with a leading a0 6= 0 for any point outside Iq instead of a0 = 0.
Lemma 4. Let q be even with q = 2h + 2. Then the blocks J(±1)h ,±mK for m ≥ 1 areforbidden. The block Ja,(±1)h ,±m,bK with a 6=±1 and b 6=±1 if m = 1, can be rewrittenas
Ja,(±1)h ,±m,bK→
[a∓1,(∓1)h ,±m∓1,b
], if m ≥ 2,[
a∓1,(∓1)h−1 ,b∓1], if m = 1 and h ≥ 2,[
a∓1,b∓1], if m = 1 and h = 1.
Proof. Since by Lemma 1 ∓λ
2 =[(±1)h] , the blocks J(±1)h ,±mK for m ≥ 1 are forbid-
den. Using then the relation (ST )2h+2 = I we can restrict ourselves to the case where thenumber of consecutive 1’s is smaller than or equal to h+1. Then the rewriting rules followimmediately from the relation (ST )2h+2 = I.
Remark 3. Obviously the rewritten block Ja∓1,b∓1K is forbidden itself if h = 1, i.e. q = 4and a = 2 and b≥ 2 or a =−2 and b≤−2 in the case of minus and plus sign respectively.How to get allowed blocks in this case after repeated rewriting will be discussed in Lemma8.
Lemma 5. Let q≥ 5 be odd with q = 2h+3. Then the blocks J(±1)h+1K and J(±1)h ,±2,(±1)h ,±mKwith m≥ 1 are forbidden. The block Ja,(±1)h+1 ,bK for a 6=±1, b 6=±1 can be rewrittenas
Ja,(±1)h+1 ,bK→[a∓1,(∓1)h ,b∓1
],
the blocks Ja,(±1)h ,±2,(±1)h ,±m,bK with a 6=±1 can be rewritten as
Ja,(±1)h ,±2,(±1)h ,±m,bK→
[a∓1,(∓1)h ,∓2,(∓1)h ,±m∓1,b
], m ≥ 2,[
a∓1,(∓1)h ,∓2,(∓1)h−1 ,b∓1], m = 1.
For q = 3 the blocks J±1K and J±2,±mK with m ≥ 1 are forbidden. The block Ja,±1,bKwith a 6=±1,±2 and b 6=±1 can be rewritten as
Ja,±1,bK→ Ja∓1,b∓1K.
The block Ja,±2,±m,bK with a 6=±1,±2 can be rewritten as
Ja,±2,±m,bK→
Ja∓1,∓2,±m∓1,bK, for m ≥ 2,
Ja∓1,b∓2,K, for m = 1.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 9
Proof. Since (ST )2h+3 = I we can restrict ourselves again to blocks with no more thanh+1 consecutive 1’s. From Lemma 1 we know that ∓λ
2 =[(±1)h ,±2,(±1)h] and hence
the forbidden blocks follow immediately. Using then the relation (ST )2h+3 = I gives therewriting rules.
Remark 4. In the first rewriting rule for q = 3 the rewritten block Ja∓1,b∓1K is forbiddenif a = 3 and b≥ 2 or a =−3 and b≤−2 (in the case of minus and plus signs respectively)or if b = ±2. The rewritten block Ja∓ 1,∓2,±m∓ 1,bK is itself forbidden if m = 2 orm = 3 and b ≥ 1 respectively b ≤−1 (in the case of minus and plus signs respectively) orb =±1. The rewritten block Ja∓1,b∓1K is forbidden in this case if a = 3 and b≥ 3 or ifa =−3 and b≤−3 (in the case of minus and plus signs respectively). How to get allowedblocks in these cases after repeated rewriting will be discussed in the proofs of Lemmas 7and 9.
Remark 5. It is easy to see that Rosen’s λ -fractions [42] can be expressed as words in thegenerators T, S and JS of the group G∗
q =< Gq,J >⊆ PGL2(R), where J : z 7→ −z is thereflection in the imaginary axis, i.e. JSx = 1
x for x ∈ R∗. Since J is an involution of Gq,e.g. JT J = T−1 and JSJ = S, it is easy to see that Rosen’s and our notions of λ -fractions areequivalent: e.g. in the Gq-word identified with our λ -fraction we replace any T−a by JT aJ,a ≥ 1. Algorithmically this means for a λ -fraction with entries a j that the correspondingRosen fraction has entries (ε j, |a j|) where ε1 = −sign(a1) and ε j = −sign(a j−1a j) forj ≥ 2.
From the definition of regular λ -fractions it is clear that Rosen’s reduced λ -fractions [42,Def. 1] correspond to a fundamental interval
[0, λ
2
]for the action of the group 〈T,J〉 to-
gether with the choices made for finite fractions in [42, Def. 1 (4)-(5)]. It is easy to verify,for example using the forbidden blocks, that a finite fraction not equivalent to±λ
2 or an in-finite regular λ -fraction correspond to a reduced λ -fraction of Rosen. The main differencebetween our regular and Rosen’s reduced λ -fractions is that any λ -fraction equivalent to±λ
2 has two valid regular λ -fractions. The root of this non-uniqueness is our choice of aclosed interval Iq which is in turn motivated by our Markov partitions in Section 3.5.
It is then clear, that those results of [42] and [8] pertaining to infinite reduced λ -fractionscan be applied directly to our regular λ -fractions.
Lemma 6. An infinite λ -fraction without forbidden blocks is convergent.
Proof. This follows from [42, Thm. 5] and Remark 5.
An immediate consequence of Definition 3 and Lemmas 4, 5 and 6 is the following
Corollary 2. A λ -fraction is regular if and only if it does not contain any forbidden block.

10 D. MAYER AND F. STRÖMBERG
Rewriting a forbidden block may produce new f.b.’s and by rewriting a f.b. completely wemean that we rewrite also all new f.b.’s that arises. For the reduction procedure cf. Section3.6 it is important that rewriting a f.b. completely can be done in most cases withoutaffecting the head of the λ -fraction (up to some point).
Lemma 7. Suppose that the λ -fraction x = Ja0;a1, . . .K has the first forbidden block be-ginning at an, n≥ 2. If q≥ 5 or q = 4 and the forbidden block is not of the type J12K, thenthe head of x up to n− 2, i.e. x(n−2) = Ja0;a1, . . . ,an−2K is not affected by rewriting thisforbidden block completely.
Proof. For simplicity consider an initial f.b. containing +1’s, the blocks with −1’s aretreated analogously. By using the relation (ST )q = I we may assume that there are noblocks of consecutive ±1’s of length greater than q
2 . The analogue of Lemmas 4 and 5 inthis case is very simple: Ja,1 j,bK→ Ja−1,(−1)q− j−2 ,b−1K for any j > q
2 .
Suppose first that q is even and that the first f.b. begins with an, i.e.
x = Ja0;a1, . . . ,an−2,an−1,1h,an+h,an+h+1, . . .K, an−1 6= 1, an+h ≥ 1.
By applying Lemma 4 we rewrite x into either Ja0;a1, . . . ,an−2,an−1 − 1,(−1)h ,an+h −1,an+h+1, . . .K if an+h ≥ 2 or Ja0;a1, . . . ,an−2,an−1−1,(−1)h−1 ,an+h+1−1,an+h+2, . . .Kif an+h = 1 (here an+h+1 6= 1). If this rewriting did not produce a new f.b. we are doneso suppose that a new f.b. was created. Note that unless q = 4 and an = an+1 = 1 (thiscase will be treated in Lemma 8) we have an+h ≥ 2 and h ≥ 1 or an+h = 1 and h ≥ 2. Inthis case there is a non-empty block of −1’s starting at position n and any new f.b. has toeither end before or begin after the block of −1’s.
If the new f.b. appears to the left of position n it clearly has to end with an−1 − 1 butsign(an−1) = sign(an−1−1) so any such f.b. had to be forbidden also before the rewrit-ing, contradicting the assumption about the position of the first f.b. in x. Any new f.b.beginning directly after the −1’s has to begin with +1 so rewriting it will only change thelast −1 to −2 and there are at least two digits between an−2 and any new f.b.’s.
Now suppose that q ≥ 5 is odd. There are two different types of f.b.’s but their treatmentsare very similar. Assume first that we have
x = Ja0;a1, . . . ,an−2,an−1,1h+1,an+h+1, . . .K, an−1,an+h+1 6= 1,
then by Lemma 5 we rewrite x into x1 = Ja0;a1, . . . ,an−2,an−1−1,(−1)h ,an+h+1−1, . . .K.There are four possibilities to create a new f.b. in x1:
(1) If the f.b. ends at an−1 − 1 then it was also forbidden in x, since sign(an−1) =sign(an−1−1), contradicting the assumption that the first f.b. begun with an.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 11
(2) If the f.b. ends with the (−1)h then x1 = Ja0;a1, . . . ,(−1)h ,−2,(−1)h ,an+h+1−1, . . .K with an+h+1 ≤−2 and an−1 = · · ·= an−2−h =−1 so the f.b. J(−1)h+1K be-ginning at an−2−h would have been present in x, also contradicting the assumptionon the first f.b.
(3) If the new f.b. begins with the (−1)h then an+2h+2 ≤ −2 ( an+2h+2 6= −1 sinceotherwise x contains J(−1)h+2K and h + 2 > q
2 ) and x1 = Ja0;a1, . . . ,an−2,an−1−1,(−1)h ,−2,(−1)h ,an+2h+2, . . .K. Rewriting gives
x2 = Ja0;a1, . . . ,an−2,an−1,1h, 2,1h,an+2h+2 +1, . . .K.
Since an−1 6= 1 any new f.b. in x2 must begin with an+2h+2 +1 =−1 in which caserewriting it only changes J. . . ,an−1,1h,2,1h, . . .K to J. . . ,an−1,1h,2,1h−1,2, . . .Kand there are at least four digits between an−2 and any new f.b.
(4) If the f.b. begins after the (−1)h then x1 = Ja0;a1, . . . ,an−2,an−1−1,(−1)h ,1h+1, . . .Kor x1 = Ja0;a1, . . . ,an−2,an−1− 1,(−1)h ,1h,2,1h,an+3h+2 . . .K with an+3h+2 ≥ 1.Rewriting this f.b. thus changes the last −1 to −2 and there are at least two digitsbetween an−2 and any new f.b.
In the second case, assume that we have
x = Ja0;a1, . . . ,an−2,an−1,1h,2,1h,an+2h+1, . . .K, an−1 6= 1,an+2h+1 ≥ 1,
then by Lemma 5 we can rewrite x into either
x2 = Ja0;a1, . . . ,an−2,an−1−1,(−1)h ,−2,(−1)h ,an+2h+1−1, . . .K, ifan+2h+1 ≥ 2, or
x3 = Ja0;a1, . . . ,an−2,an−1−1,(−1)h ,−2,(−1)h−1 ,an+2h+2−1, . . .K, ifan+2h+1 = 1.
If x2 or x3 contains a new forbidden block, a similar argument as above tells us that it mustbegin with either with an+2h+1−1 = 1 or an+2h+2−1 = 1 in which case rewriting it willonly change the last −1 to a −2 if h ≥ 2 or the −2 to a −3 if h = 1. In all cases there areat least 3 digits between an−2 and any new f.b.
We have shown that for any f.b. we can rewrite it without changing an−2 or any digitto the left of it and after this rewriting any new f.b.’s are separated from an−2 by at least2 digits. A recursive application of the above argument thus shows that in any case anyfurther rewriting will not change the head x(m−2).
Lemma 8. Let q = 4 and suppose that x = Ja0;a1,a2, . . . ,an−l−1,(±2)l ,(±1)2 ,(±2)k ,an+k+2, . . .Khas precisely one forbidden block, which begins with an = an+1 =±1 and an−l−1,an+k+2 6=±2. Then a complete rewriting of this forbidden block does not affect the head x(n−m) =Ja0;a1, . . . ,an−mK where m = 0 if l = 0, m = 3 if l ≥ 1 and k = 0 and m = min(k +3, l +3)otherwise. In all cases we assume that n ≥ m.

12 D. MAYER AND F. STRÖMBERG
Proof. Suppose without loss of generality that x = Ja0;a1, . . . ,an−l−1,2l,12,an+2, . . .K withn≥ l +1≥ 1, an = an+1 = 1, an−l−1 6= 2 and an−1 6= 1.if l = 0 then an−1 6= 1. The case of(−1)2 is analogous.
If l = 0 then one rewriting of x produces x0 = Ja0;a1, . . . ,an−1 − 1,an+2 − 1, . . .K whichdoes not contain a new f.b. unless an+2 = 2. If an+2 = 2 and an+3 ≥ 2 the new f.b. isof the type covered in Lemma 7 and rewriting it completely does not change x(n−2). Ifan+2 = 2 and an+3 = 1 then an+4 ≤−1 and x0 = Ja0;a1, . . . ,an−1−1,12,an+4 . . .K whichis rewritten into x1 = Ja0;a1, . . . ,an−1−2,an+4−1, . . .K which contains no f.b., and hencex(n−2) is not changed.
Suppose that l ≥ 1. If an+2 ≤−1 one rewriting produces Ja0;a1, . . . ,an−l−1,2l−1,1,an+2−1, . . .K which contains no f.b. and does not change x(n−2).
If an+2 ≥ 3 then two rewritings produce Ja0;a1, . . . ,an−2−1,−1,an+2−2, . . .K if l = 1 andx2 = Ja0;a1, . . . ,an−l−1,2l−2,1,−1,an+2 − 2, . . .K if l ≥ 2. The first rewritten λ -fractiondoes not contain any f.b. but the second may contain a new f.b. if an+2 = 3 and an+3 ≥ 1.If an+2 = 3 and an+3 ≥ 2 this is a f.b. of the type J1,mK with m≥ 2 and by Lemma 7 we canrewrite it completely without changing x(n−3). If an+2 = 3 and an+3 = 1 then an+4 ≤ −1and we rewrite x2 into Ja0;a1, . . . ,an−l−1,2l−2,1,−2,an+4−1, . . .K which contains no f.b.,without changing x(n−3).
The remaining case is when an+2 = 2. Assume that x = Ja0;a1, . . . ,an−l−1,2l,12,2k,an+k+2, . . .Kwith an−l−1,an+k+2 6= 2 and k≥ 1. It is easy to see that J2,12,2K is rewritten into J12K so ifl ≥ k we rewrite x in k steps into x3 = Ja0;a1, . . . ,an−l−1,2l−k,12,an+k+2, . . .K which, as hasbeen shown above, can be rewritten completely without changing x(n−k−3) (the last 2 be-fore the 12 is an−(k+1)). If l < k we rewrite x in l steps into Ja0;a1, . . . ,an−l−1,12,2k−l,an+k+2, . . .Kwhich is then rewritten into x4 = Ja0;a1, . . . ,an−l−1 − 1,1,2k−l−1,an+k+2, . . .K. If eitherk ≥ l + 2 or k = l + 1 and an+k+2 ≥ 3 then x4 contains a new f.b. of the type J1,mK withm ≥ 2 which, by Lemma 7, can be rewritten completely without changing x(n−l−2). Ifk = l+1 and an+k+2 = 1 then an+k+3 ≤−1 and x4 = Ja0;a1, . . . ,an−l−1−1,12,an+k+3, . . .Kwhich we have shown above can be rewritten completely without changing x(n−l−2).
We have shown that the f.b. in x = Ja0;a1, . . . ,an−l−1,2l,12,2k,an+k+2 . . .K can be rewrittencompletely without changing x(n−m) where m = 2 if l = 0 and m = 3 if l ≥ 1 and k = 0respectively m = min(l +3,k +3) otherwise. (Of course we can do better in certain casesbut we are mainly interested in whether m is finite or not.)
Lemma 9. Let q = 3 and suppose that x = Ja0;a1, . . .K has only one forbidden block,which begins at an. Assume further that x contains at most one digit ±1. Then a com-plete rewriting of x does not change the head x(n−m) where m = min(l +3,k +4) if x =

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 13
Ja0;a1, . . . ,an−l−1,(±3)l ,±2,±1,(±3)k ,an+k+2, . . .K, l,k ≥ 0, with an−l−1 6=±2,±3 andan+k+2 6=±3 and m = 3 otherwise. We assume in all cases that n ≥ m.
Proof. Assume without loss of generality that an ≥ 1. The case of an ≤ −1 is analogous.There are three different f.b.’s to consider. Suppose first that
x = Ja0;a1, . . . ,an−2,an−1,1,an+1, . . .K,
where an−1 6= 1,2, an+1 6= ±1 and if an+1 = ±2 then sign(an+2) = −sign(an+1). ByLemma 5 we rewrite x into x0 = Ja0;a1, . . . ,an−2,an−1 − 1,an+1 − 1,an+2, . . .K. Sincesign(an−1) = sign(an−1−1) there can be no new f.b. ending at an−1 − 1 so there areonly three possibilities to create a new f.b., either an−1 = 3 and an+1 ≥ 2 or an+1 = 3 andan+2 ≥ 2 or an+1 = 2:
(1) If an−1 = 3 then x0 = Ja0;a1, . . . ,an−2,2,an+1 − 1,an+2, . . .K and if an+1 ≥ 3 werewrite x0 into x1 = Ja0;a1, . . . ,an−2 − 1,−2,an+1 − 2,an+2, . . .K and if an+1 = 2into x2 = Ja0;a1, . . . ,an−2−1,an+2−2,an+3, . . .K. Since an−2 6=−1 and an+2 ≤−2in x2 there can not be any new f.b.’s in x2. Since the tail Jan+1,an+2, . . .K does notcontain any more forbidden blocks we can only obtain a new f.b. in x1 if an+1 = 4and an+2 ≥ 2 or an+1 = 3.(a) If an+1 = 4 and an+2 ≥ 2 then x1 = Ja0;a1, . . . ,an−2−1,−2,2,an+2, . . .K which
is rewritten into Ja0;a1, . . . ,an−2−1,−3,−2,an+2−1, . . .K and there is at least3 digits between an−3 and any new f.b.
(b) If an+1 = 3 then x1 = Ja0;a1, . . . ,an−2−1,−2,1,an+2, . . .K which is rewritteninto Ja0;a1, . . . ,an−2− 1,−3,an+2− 1,an+3, . . .K and there is at least 2 digitsbetween an−3 and any new f.b.
(2) If an−1 6= 3, an+1 = 3 and an+2 ≥ 2 then x0 = Ja0;a1, . . . ,an−2,an−1−1,2,an+2, . . .Kis rewritten into x3 = Ja0;a1, . . . ,an−2,an−1 − 2,−2,an+2 − 1, . . .K and there is atleast 3 digits between an−3 and any new f.b.
(3) If an−1 6= 3, an+1 = 2 then x0 = Ja0;a1, . . . ,an−2,an−1−1,1,an+2, . . .K is rewritteninto x4 = Ja0;a1, . . . ,an−2,an−1−2,an+2−1,an+3, . . .K and since an+2 ≤−2 thereis at least 3 digits between an−3 and any new f.b.
We have shown that a single rewriting of a f.b. of the type ±1 does not change the λ -fraction more than two steps to the left of the beginning of the f.b..
The second type of forbidden block is:
x = Ja0;a1, . . . ,an−1,2,an+1,an+2, . . .K, an−1 6=±1,2,
where an+1 ≥ 2 and we rewrite x into x5 = Ja0;a1, . . . ,an−1− 1,−2,an+1− 1,an+2, . . .K.Then any new f.b. in x6 must begin with an+1 = 2 or an+1 = 3 and an+2 ≥ 2. For an+1 = 2rewriting leads to x6 = Ja0;a1, . . . ,an−1−1,−3,an+2−1,an+3, . . .K which does not containany new f.b. since an+2 ≤ −2. For an+1 = 3 rewriting leads to x7 = Ja0;a1, . . . ,an−1 −

14 D. MAYER AND F. STRÖMBERG
1,−3,−2,an+2−1,an+3, . . .K, hence any more rewriting of newly appearing f.b.’s does notchange the head x(n−2).
We have shown that rewriting a single f.b. of the type J1K or J2,bK with b ≥ 2 does notchange the head x(n−3).
The third and most complicated type of f.b. is when an = 2 and an+1 = 1. Suppose that
x = Ja0;a1, . . . ,an−1−l,3l,2,1,3k,an+2+k, . . .K, l,k ≥ 0, an−1−l 6= 2,3, an+2+k 6= 3.
By Lemma 5 it is clear that J3,2,1,3K is rewritten into J2,1K and using this recursively weget different three cases depending on if l < k, = k or > k.
(1) If l > k then x is rewritten first into Ja0;a1, . . . ,an−1−l,3l−k,2,1,an+2+k, . . .K andthen into y0 = Ja0;a1, . . . ,an−1−l,3l−k−1,2,an+2+k − 2, . . .K which may contain anew f.b. beginning with the 2 but an+2+k−2 6= 1 and we have shown above that anf.b. of the type J2,mK with m ≥ 2 can be rewritten without changing any elementin the sequence more than two steps to the left of the f.b. Hence we can rewriteany new f.b. without changing the head x(n−k−4).
(2) If l < k then x is first rewritten into Ja0;a1, . . . ,an−1−l,2,1,3k−l,an+2+k, . . .K, theninto Ja0;a1, . . . ,an−1−l−1,1,3k−l−1,an+2+k, . . .K and next into y1 = Ja0;a1, . . . ,an−1−l−2,2,3k−l−2,an+2+k, . . .K if k≥ l+2 or y2 = Ja0;a1, . . . ,an−1−l−2,an+2+k−1,an+3+k, . . .Kif k = l +1.(a) If k > l+2 we rewrite y1 into y3 = Ja0;a1, . . . ,an−1−l−3,−2,3k−l−3,an+2+k, . . .K
which can only contain a new f.b. if k = l +3 and an+2+k ≤−2 and we haveshown that rewriting such a f.b. does not affect the sequence more than twosteps to the left so any further rewriting can not change the head x(n−3−l).
(b) If k = l+2 and an+2+k ≥ 2 we rewrite y1 = Ja0;a1, . . . ,an−1−l−2,2,an+2+k, . . .Kinto y4 = Ja0;a1, . . . ,an−1−l − 3,−2,an+2+k − 1, . . .K so any new f.b. in y4 iseither beginning with an+2+k − 1 = 1 or with an−1−l − 3 = 1. If it is begin-ning with an−1−l − 3 = 1 then y4 is rewritten into y5 = Ja0;a1, . . . ,an−2−l −1,−3,an+2+k−1, . . .K which can only have a new f.b. beginning with an+2+k−1−1 = 1. In case an+2+k+1−1 = 1 we have shown that rewriting such an f.b. doesnot affect the sequence more than two steps to the left and thus, in both cases,a complete rewriting will not change x(n−3−l).
(3) If k = l then x is first rewritten into Ja0;a1, . . . ,an−1−l,2,1,an+2+k, . . .K, then intoz0 = Ja0;a1, . . . ,an−1−l−1,an+2+k−2, . . .K and since an−1−l 6= 2,3 and an+2+k 6= 3any new f.b. must either begin with an+2+k−2 = 0,2. In case an+2+k = 2 we getz1 = Ja0;a1, . . . ,an−1−l + an+3+k − 1,an+4+k, . . .K and an+4+k ≤ −2 so any newf.b. has to be of the form an−1−l +an+3+k−1 =±1 or an−1−l +an+3+k−1 =−2.In both cases we have a f.b. which we have shown is possible to rewrite without

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 15
changing the sequence more than two steps to the left hence rewriting does notchange the head x(n−4−l).
We conclude that for all three types of f.b.’s, a complete rewriting of the initial f.b. leavesthe head x(n−m) unchanged with m = 3 unless x = Ja0;a1, . . . ,an−1−l,3l,2,1,3k,an+2+k, . . .Kin which case m = min(l +3,k +4).
3.3. Dual regular λ -fractions
To encode the orbits of the geodesic flow in terms of a discrete invertible dynamical systemit turns out that we still need another kind of λ -fraction, the so-called dual regular λ -fraction. In the case q = 3 this was already introduced by Hurwitz [22], see also [25, p.102].
Consider the set of λ -fractions y = J0;b1, . . .K which do not contain any reversed forbiddenblock, i.e. a forbidden block given in Definitions 4 or 5 read in reversed order.
Let R be the largest number in this set and define r = R−λ and IR = [−R,R]. To give anexplicit expression for R we need to investigate the connection between ordering of pointsand their corresponding λ -fractions.
Lemma 10. Let x,y ∈ Iq with cq (x) =[a1,a2, . . .
]and cq (y) =
[b1,b2, . . .
]and suppose
that x and y are not Gq-equivalent to ±λ
2 and that a1 6= b1. Then x < y if and only ifb1 < 0 < a1 or b1a1 > 0 and a1 < b1. For one-digit λ -fractions this ordering is simplygiven by [
1]<[2]< · · ·< 0 < · · ·<
[−2]<[−1].
Proof. Consider ϕn (x) = ST n (x) = −1nλ+x then ϕn
(Iq)
=[
−2λ (2n−1) ,
−2λ (2n+1)
]= [ln,rn] and
the intervals [ln,rn] only overlap at their endpoints which are images of ±λ
2 . It is also easyto verify that rn < rm if and only if m < 0 < n or mn > 0 and n < m. Since x ∈ ϕa1
(Iq)
andy ∈ ϕb1
(Iq)
the lemma follows.
Lemma 11. Let x = Ja1, . . . ,an−1,aK, y = Ja1, . . . ,an−1,bK and x,y the correspondingpoints. Assume that
[a2, . . . ,an−1,a
]and
[a2, . . . ,an−1,b
]are both regular. Then x < y
if and only if b < 0 < a or ab > 0 and a < b.
Furthermore, if y = Ja1, . . . ,an−1K then x < y if and only if a > 0.
Proof. First consider ϕm (x) = ST mx = −1mλ+x then ϕ ′
m (x) = (mλ + x)−2 > 0 for all x 6=−mλ so ϕm is increasing and positive in (−∞,−mλ ) and increasing and negative in(−mλ ,∞). Hence ϕm (x) = ST mx < ϕm (y) = ST my ⇔ either y <−mλ < x or x < y.

16 D. MAYER AND F. STRÖMBERG
Define A j = ST a j ST a j+1 · · · ST an−1, x j = A jST a (0) , y j = A jST b (0), j = 1, . . . ,n−1. Thenx1 = x, y1 = y and x j,y j ∈ Iq for all j = 2, . . . ,n− 1. Hence, if m ∈ Z∗ then λ
2 < |mλ | soLemma 10 implies that ST mx j < ST my j if and only if x j < y j, for all j = 2, . . . ,n− 1 forall m ∈ Z∗. Using the fact that x j = ST a jx j+1 and y j = ST a jy j+1 we see that ST a1x1 <
ST a1y1 ⇔ x1 < y1 ⇔ ST a2x2 < ST a2y2 ⇔ x2 < y2⇔ ··· ⇔ ST a (0) < ST b (0) ⇔ 1b < 1
a⇔ b < 0 < a or ab > 0 and a < b.
To prove the last equivalence, define z j = A j (0) and proceed as above: A1ST a (0) < A1 (0)⇔ ST a1x1 < ST a1z1 ⇔ ·· · ⇔ ST an−1ST a (0) < ST an−1 (0) ⇔ ST a (0) < 0 ⇔ a > 0.
Using Lemmas 10 and 11 it is easy to prove the following Lemma.
Lemma 12. Let x,y∈R have the following infinite regular λ -fractions: cq (x)=[a0;a1,a2,a3, . . .
], cq (y)=[
b0;b1,b2,b3, . . .]. Then x < y if and only if either a0 < b0 or ai = bi for i = 0, . . . ,n− 1
and either bn < 0 < an or anbn > 0 and an < bn for some n ≥ 1.
Proof. Define x j = limm→∞ ST a j ST a j+1 · · · ST am and y j = limm→∞ ST b j ST b j+1 · · · ST bm
for j ≥ 1 and observe that we have x j,y j ∈ Iq for all j ≥ 1. It is clear that if a0 < b0then x < y and if a0 > b0 then x > y. Suppose that a0 = b0. If x 6= y then there exists asmallest n ≥ 1 such that an 6= bn and ai = bi for 0 ≤ i ≤ n− 1. Hence, just as in the pre-vious proof of Lemma 11, x < y if and only if x1 < y1 ⇔ ··· ⇔ xn < yn. Since xn,yn ∈ Iqhave infinite λ -fractions we can apply Lemma 10 and see that xn < yn ⇔ bn < 0 < an oranbn > 0 and an < bn.
Lemma 13. The number R is given by the following regular λ -fraction
R =
[1;1h−1,2
], for qeven,[
1;1h,2,1h−1,2], for q ≥ 5odd,[
1;3], for q = 3.
Proof. To obtain the largest number without reversed forbidden blocks we use Lemma11 recursively. I.e. the largest one-digit λ -fraction is J−1K and J(−1)2K is the largesttwo-digit λ -fraction etc. For q 6= 3 J(−1)hK is the largest h-digit λ -fraction without re-versed forbidden blocks but since J(−1)h+1K is forbidden and reversely forbidden thelargest h + 1-digit λ -fraction without reversed f.b.’s is J(−1)h ,−2K. Continuing like thisinductively and observing that the λ -fraction without the first −1 is always regular weobtain the following expressions for R: R = J0;(−1)h ,−2,(−1)h−1K for even q, R =J0;(−1)h ,−2,(−1)h ,−2,(−1)h−1K for odd q ≥ 5 and R = J0;−2,−3K for q = 3. TheLemma then follows by rewriting these λ -fractions recursively into regular λ -fractionsusing Lemmas 4 and 5.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 17
Lemma 14. For even q we have the identity R = 1.
Proof. Consider the action of S on R: SR =[0;1h,2,1h−1
]=[−1;(−1)h−1 ,−2
]= −R.
Hence −1/R =−R and since R > 0 we must have R = 1.
Lemma 15. For odd q we have λ
2 < R < 1 and
a) −R = (T S)h+1 R,b) R2 +(2−λ )R−1 = 0
Proof. From the explicit expansions of λ
2 and 1 in Lemmas 1 and 2 together with theexpansions of R in Lemma 13 it follows from Lemmas 11 and 12 that λ
2 < R < 1. Byrewriting as in Lemma 5 for q ≥ 5 we get
SR = J0;1h+1,2,1h−1,2,1hK =[−1;(−1)h−1 ,−2,(−1)h ,−2,(−1)h−1 ,−2
]and deduce
that R = ST−1 (ST−1)h−1 ST−2T (−R) =(ST−1)h+1 (−R) and hence −R = (T S)h+1 R,
which is identity a). A similar rewriting works for q = 3. Using the following explicitformula for the matrix (T S)n (cf. e.g. [8, p. 1279])
(2) (T S)n =1
sin2 π
q
(Bn+1 −BnBn −Bn−1
), whereBn = sin
nπ
q
and some elementary trigonometry gives (T S)h+1 R = −R+1−R+λ−1 =−R which implies iden-
tity b). See also Lemma 3.3 in [8].
Remark 6. Using the representation (2) one can also show that the map Ar fixing r =R− λ is given by Ar = (ST )h+1 T (ST )h T = 1
(2−λ )2
(2−2λ λ−2λ 2
λ 2+λ 2
)for odd q and Ar =
(ST )h−1 ST 2 = 14−λ 2
(2−λ 2 λ−λ 3
λ 2+λ 2
)for even q.
Definition 5. Let y = Jb0;b1, . . .K be a finite or infinite λ -fraction. Set y1 = J0;b1, . . .K,y j = σ j−1y1 = J0;b j, . . .K and y j, j ≥ 1, the corresponding point in R. Then y is said to bea dual regular λ -fraction if and only if it has the following properties:
if b0 = 0 ⇒ y ∈ IR,(D1)
if b0 6= 0 ⇒ y1 ∈ sign(b0) [r,R] , and(D2)
y j+1 ∈ sign(−y j
)[r,R] for all j ≥ 1.(D3)
A dual regular λ -fraction is denoted by[b0;b1, . . .
]∗, the space of all dual regular λ -fractions by A ∗
q and the subspace of all infinite sequences in A ∗q with leading 0 by A ∗
0,q.
Uniqueness of a subset of dual regular λ -fractions is again asserted using a generatingmap.

18 D. MAYER AND F. STRÖMBERG
Definition 6. Let b·c be the floor function from Definition 4 and consider the shiftednearest λ -multiple function 〈y〉∗
λ=⌊ y
λ+ R
λ
⌋if y ≤ 0 and 〈y〉∗
λ=⌊ y
λ− r
λ
⌋if y > 0. For
IR = [−R,R] we define the map F∗q : IR → IR by
F∗q y =
−1
y −〈−1y 〉∗λ
λ , y ∈ IR\0 ,
0, y = 0.
Lemma 16. For y ∈ R the following algorithm produces a finite or infinite dual regularλ -fraction c∗q (y) =
[b0;b1, . . .
]∗ corresponding to y:
(i) Let b0 = 〈y〉∗λ
and y1 = y−b0λ .(ii) Set y j+1 = F∗
q y j =− 1y j−b jλ , i.e. b j = 〈− 1
y j〉∗
λ, j ≥ 1.
If y j = 0 for some j the algorithm stops and one obtains a finite dual regular λ -fraction.
Proof. It is easy to verify that 〈y〉∗λ
= 0⇔ y∈ IR and that in general x−〈x〉∗λ∈ [r,R] for x≥
R and x−〈x〉∗λ∈ [−R,−r] for x≤−R. It is thus clear that (D1) and (D2) are automatically
fulfilled and it follows that F∗q maps [−R,0] into [r,R] and [0,R] into [−R,−r]. Hence
condition (D3) is also satisfied.
Remark 7. We say that F∗q is a generating map for the dual regular λ -fractions and it is
easily verified that F∗q acts as a left shift map on A ∗
0,q.
It is easily seen that the points affected by the choice of floor function appearing in 〈·〉∗λ
(cf. ±λ
2 in the regular case) are exactly those that are equivalent to ±r. Hence we obtainthe following corollary.
Corollary 3. If y has an infinite dual regular λ -fraction expansions which is not equivalentto the expansion of ±r then it is unique and is equal to c∗q (y).
Lemma 17. A λ -fraction y = Jb0;b1, . . .K is dual regular if and only if the sequence y0does not contain any reversed forbidden blocks. Thereby y0 = y if b0 = 0 and y0 = Sy =J0;b0,b1, . . .K if b0 6= 0.
Proof. For both even and odd q we use Lemma 10, 11 and 12 to compare points basedon their λ -fractions. We give the details for the case of forbidden blocks containing +1’s.The case of −1’s is analogous.
Consider q even and a reversed forbidden block of the form Jm,1hK with m ≥ 1. If y0contains such a forbidden block, we have y j = Jb j,1h,bh+ j+1, . . .K < 0 for some j ≥ 0 and
b j ≥ 1. Hence y j+1 = J1h,bh+ j+1, . . .K <[1h−1,2
]= r, i.e. y j+1 /∈ [r,R] so by Definition 5
(D2) (in case j = 0) or (D3) (in case j > 0) y is not dual regular.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 19
Consider q odd. If y0 contains a reversed f.b. of the form J1h+1K then y0 is not dualregular since J1h+1K <
[1h,2,1h,2,1h−1
]∗ =−R. If y0 contains a reversed f.b. of the formJm,1h,2,1hK for some m≥ 1 then y j = Jb j,1h,2,1h,b j+2h+2, . . .K < 0 for some b j ≥ 1 and
j ≥ 0. Hence y j+1 = J1h,2,1h,b j+2h+1, . . .K < r, i.e. y j+1 /∈ [r,R] so by Definition 5 (D2)(in case j = 0) or (D3) (in case j > 0) y is not dual regular.
In the other direction, suppose that y = Jb0;b1, . . .K does not contain any reversed forbiddenblocks. It is clear that if b0 = 0 then y0 = y and y = y0 ∈ [−R,R] so y is dual regular. Sup-pose that b0 6= 0. Then y0 = Jb0,b1,b2, . . .K and y j = Jb j,b j+1, . . .K. Suppose that y0 does
not contain any reversed f.b. and that b j > 0. If q is odd then y j+1 > J1h,2,1h−1,2, . . .K≥ r
and if q is even then y j+1 > J1h−1,2, . . .K≥ r. Hence y j+1 ∈ [r,R]. Similarly if b j < 0 wesee that y j+1 ∈ [−R,−r].
Lemma 18. An infinite λ -fraction without reversed forbidden blocks converges.
Proof. This follows from the convergence of infinite regular λ -fractions using rewriting.Note that the only case in which rewriting gives a non-convergent λ -fraction is if weproduce an infinite sequence of new forbidden blocks all beginning at the same position.From the proofs of Lemmas 7 8 and 9 it is easy to see that this only occurs for the λ -fraction x if either q = 4 and x has the tail J12,2,1K or q = 3 and x has the tail J1,3K. Thesetwo tails both contain reversed forbidden blocks and hence can not occur.
Remark 8. Just as the regular λ -fractions are equivalent to the reduced Rosen λ -fractions,one can show that the dual regular λ -fractions are essentially equivalent to a particularinstance of so-called α-Rosen λ -fractions, see [10] and [34] (in the case q = 3). Note that〈y〉∗
λ=⌊ y
λ+1− R
λ
⌋for y > 0. Hence F∗
q x = Tα (x) with α = Rλ
for x < 0 where Tα is thegenerating map of the α-Rosen fractions of [10].
3.4. Symbolic dynamics and natural extensions
An introduction to symbolic dynamics and coding can be found in e.g. [28]. See also[4, 47] or [4, Appendix C]. Our underlying alphabet is infinite, N = Z∗ = Z\0. Thedynamical system
(N Z+,σ+) is called the one-sided full N −shift. Since the forbidden
blocks (cf. Definitions 4 and 5) imposing the restrictions on A0,q and A ∗0,q all have finite
length it follows that(A0,q,σ
+) and (A ∗0,q,σ
+) are both one-sided subshifts of finite type(cf. [4, Thm. C7]).
One can show that cq : Iq → Aq and c∗q : IR → A ∗q as given by Lemmas 3 and 16 are
continuous (with respect to the metric h defined in Section 3.1) and we call these theregular and dual regular coding map respectively. Let R∞ =
x ∈ R |c∗q (x) infinite
=
R\Gq (∞) be the set of „Gq-irrational points“ and set I∞α = Iα ∩R∞ for α = q,R. Since

20 D. MAYER AND F. STRÖMBERG
the set Gq (∞) of cusps of Gq is countable it is clear, that the Lebesgue measure of I∞α
is equal to that of Iα , α = q,R. By Corollaries 1 and 3 it follows that the restrictionscq : I∞
q → A0,q and c∗q : I∞R → A ∗
0,q are homeomorphisms. Since σ+ = cq Fq c−1q on
A0,q and σ+ = c∗q F∗q c∗q
−1 on A ∗0,q it follows that the one-sided subshifts
(A0,q,σ
+)and (A ∗
0,q,σ+) are topologically conjugate to the abstract dynamical systems
(I∞q ,Fq
)and(
I∞R ,F∗
q)
respectively (see [4, p. 319]).
Consider the set of regular bi-infinite sequences Bq ⊂ A ∗0,q ×A0,q ⊂ ZZ consisting of
precisely those[. . . ,b2,b1 a1,a2, . . .
]which do not contain any forbidden block. Then(
Bq,σ)
is a two-sided subshift of finite type extending the one-sided subshift(A0,q,σ
+) ,where σ = σ+ and σ−1 = σ−. If c∗q (y) =
[b1,b2, . . .
]∗ ∈A ∗0,q and cq (x) =
[a1,a2, . . .
]∈
A0,q we define the coding map C : Iq×IR →ZZ by C(x,y)= c∗q (y)cq (x)=[. . . ,b2,b1 a1,a2, . . .
].
For a given bi-infinite sequence ζ =[. . . ,b2,b1 a1,a2, . . .
]we let ζ
(+)=[a1,a2, . . .
]and
ζ(−)
=[b1,b2, . . .
]∗ denote the „future“ and „past“ respectively. In the next section wewill see that there exists a domain Ω⊂ Iq× IR such that C|Ω∞ : Ω∞ →Bq is one-to-one andcontinuous (here Ω∞ = Ω∩ I∞
q × I∞R , i.e. we neglect points (x,y) where either x or y has a
finite λ -fraction). The natural extension, Fq, of Fq to Ω∞ is defined by the condition that(Bq,σ
)is topologically conjugate to
(Ω∞, Fq
), i.e. by the relations σ+ = C Fq C−1
and σ− = C F−1q C−1, meaning that Fq (x,y) =
(Fqx, −1
y+a1λ
)with a1 = 〈−1
x 〉λ and
F−1q (x,y) =
(−1
x+b1λ,F∗
q y)
with b1 = 〈−1y 〉
∗λ
.
3.5. Markov partitions for the generating map Fq
To construct a Markov partition of the interval Iq with respect to Fq we consider the orbitsof the endpoints ±λ
2 . For x ∈ Iq or y ∈ IR we define the Fq-orbit and F∗q -orbit of x and y
respectively as
O (x) =
F jq x | j ∈ Z+
and O∗ (y) =
F∗
qjy | j ∈ Z+
.
By Lemma 1 it is clear that O(±λ
2
)is a finite set. Define κ = #
O(
λ
2
)−1 = q−2
2 = h
for even q and κ = q− 2 = 2h + 1 for odd q. Let −λ
2 = φ0 < φ1 < · · · < φκ = 0 be an
ordering of O(−λ
2
), set I j =
[φ j−1,φ j
)and I− j =−I j for 1≤ j≤ κ . It is easy to verify
that the closure of the intervals form a Markov partition of Iq for Fq. I.e.I j
coversIq, overlaps only at endpoints and Fq maps endpoints to endpoints. Since the alphabet N
is infinite there exist also another Markov partition of the form Jn =[
−2λ (2n−1) ,
−2λ (2n+1)
]∩[
−λ
2 ,0]
= −J−n with n ∈ N and if q > 4 then n ≥ 1 and if q = 3 then n ≥ 2. The map

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 21
−1x −nλ restricted to Jn is expanding and bijective and maps the interval Jn for n = 2 in the
case q = 3 respectively for n = 1 in case q > 3 not onto the entire interval Iq, that meansthe Markov partition is not proper.
From the explicit formula of Fq−1 it is clear that we also need to consider the orbits of the
endpoints of ± [r,R]. From Lemmas 14 and 15 we see that #O∗ (−R)= κ +1. Set r0 =−R and let 0 > r1 > r2 > · · ·> rκ = r >−R = r0 be an ordering of O∗ (−R) =
r j
. Onecan verify that rκ+1− j ∈ I j, 1 ≤ j ≤ κ . Define the intervals R j =
[r j,R
]= −R− j, 1 ≤
j ≤ κ , the rectangles Ω j = I j ×R j, 1 ≤ | j| ≤ κ and finally the domain Ω = ∪| j|≤κΩ j.We also set Ω∞= Ω∩ I∞
q ∩ I∞R .
Remark 9. For even q we have φ0 =−λ
2 =[1h] , r =
[1h−1,2
]and κ = h where h = q−2
2(see Lemma 1 and 13). It is then easy to verify that
φ j = F jq (φ0) =−φ− j =
[1h− j] , 0 ≤ j ≤ h,
r j = Fh− jq (r) =
[1 j−1,2,1h−1
], 1 ≤ j ≤ h,
I j =[φ j−1,φ j
)=[[
1h+1− j],[1h− j
])=−I− j, 1 ≤ j ≤ h,
R j =[r j,R
]=−R− j, 1 ≤ j ≤ h.
Remark 10. For odd q ≥ 5 we have φ0 = −λ
2 =[1h,2,1h], r =
[1h,2,1h−1,2
]and κ =
2h+1 where h = q−32 (see Lemma 1 and 13). It is then easy to verify that
φ2 j = F jq (φ0) =
[1h− j,2,1h] , 0 ≤ j ≤ h,
φ2 j−1 = Fh+ jq (φ0) =
[1h+1− j] , 1 ≤ j ≤ h+1,
r2 j+1 =[1 j,2,1h−1,2,1h,2
], 0 ≤ j ≤ h and
r2 j =[1 j−1,2,1h,2,1h−1,2
], 1 ≤ j ≤ h.
Hence
I2 j+1 =[φ2 j,φ2 j+1
)=[[
1h− j,2,1h] ,[1h− j]) , 0 ≤ j ≤ h,
I2 j =[φ2 j−1,φ2 j
)=[[
1h+1− j] ,[1h− j,2,1h]) , 1 ≤ j ≤ h,
Rk = [rk,R] =−R−k, 1 ≤ k ≤ 2h+1.
For q = 3 we have κ = 1, φ0 =−12 =
[2], φ1 = 0 and r1 = r =
[3]. Hence I1 =
[−1
2 ,0)=
−I−1 and R1 = [r,R] =−R−1.
To establish the sought correspondence between the domain Ω∞ and Bq we first need aLemma.
Lemma 19. r is the smallest number y in IR such that C(x,y) ∈Bq for all x ∈Iκ .

22 D. MAYER AND F. STRÖMBERG
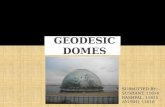
FIGURE 1. Domains Ω and Ω∗ = Ω∗L∪Ω∗
R for q = 7
ΩΩ∗L Ω∗
R
Proof. Let q be even. We know from Lemma 13 and its proof that r =[1h−1,2
]∗, −R =[1,1h−1,2
]∗ and φκ−1 = φh−1 =[1]. Hence C(φh−1,r) ∈ Bq and for −R ≤ y < r then
c∗q (y) =[1h,bh+1, . . .
]∗ and C(φh−1,y) contains the forbidden block J1h+1K.
Let q ≥ 5 be odd. Then r =[1h,2,1h−1,2
]∗, −R =[1,1h−1,2,1h,2
]∗ and φκ−1 = φ2h =[2,1h] . Hence C(φ2h,r) ∈ Bq and if −R ≤ y < r then c∗q (y) =
[1h,2,1h,b2h+2, . . .
]∗ andC(φ2h,y) contains the forbidden block J1h,2,1h,2K. We have shown that r is the smallestnumber such that C(φκ−1,r) does not contain a forbidden block and it is easy to show thatalso C(x,r) ∈Bq for any x ∈Iκ = [φκ−1,0). The same argument applies to q = 3.
Lemma 20. (x,y) ∈ Ω∞ ⇔ C(x,y) ∈Bq.
Proof. Just as in the proof of Lemma 19 it is not hard to verify that r j is the smallest num-ber in IR with a dual regular expansion which can be prepended to the regular expansionof φ j and hence of all x ∈
[φ j,0
).
Definition 7. To determine the first return map we introduce a „conjugate“ region Ω∗ =S (Ω∞) where S (x,y) = (Sx,−y), i.e. setting I ∗
j = S(I j∩ I∞
j
), R∗
j = −R j ∩ I∞R and
Ω∗j = I ∗
j ×R∗j we get Ω∗ = ∪Ω∗
j .
Thus Ω with Ω∞ as a dense subset is the domain of the natural extension Fq of Fq. Anexample of Ω and Ω∗ is given in Figure 1. See [35] for another choice of a „conjugate“ Ω∗
of Ω using the maps(x,y−1) and also [8] for the corresponding domain for the reduced
Rosen fractions. In the case q = 3 the domain Ω∗ was considered also by Hurwitz in hisreduction process for pairs of points under his continued fraction expansion.
3.6. Reduction of λ -fractions
In a first step in our construction of a cross-section for the geodesic flow we select a setof geodesics on H which contains at least one lift of each geodesic on Mq = H /Gq,

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 23
i.e. a set of „representative“ or „reduced“ geodesics modulo Gq. For an overview and adiscussion of different reduction procedures in the case of PSL2(Z) see [25, Sect. 3].
Lemma 21. Let u 6= v ∈ R∞ both have infinite λ -fractions. Then there exists B ∈ Gq suchthat (Bu,Bv) ∈ Ω∗.
Proof. Set u′ = Su = −1u and v′ = Jv = −v. Assume without loss of generality that
cq (u′) =[a0;a1,a2, . . .
]and c∗q (v′) =
[0;b1,b2, . . .
]∗. We now extend the domain of defini-
tion of F−1q from Iq× IR to R∞× IR by setting F−1
q (x,y) =(
−1x+bλ
,F∗q y)
, b = 〈−1y 〉∗λ
. Since
x ∈ R∞ x + bλ 6= 0 so F−1q (x,y) is well-defined. Then F−1
q (u′,v′) =(ST b1u′,T−b1Sv′
),(
F−1q)2 (u′,v′) =
(ST b2ST b1u′,T−b2ST−b1Sv′
), etc. In fact, if n≥ 1 then
(F−1
q)n (u′,v′) =
(SAnSu′,JAnJv′) = S An S (u′,v′) = S An (u,v) where An = T bnST bn−1S · · · T b1S. It iseasy to verify that JT mJ = T−m for any m ∈ Z.
If a j = −b j+1, j = 0, . . . ,k− 1 and ak + bk+1 6= 0 and we take n > k it is clear that u′n =SAnSu′ has the formal λ -fraction u′n = J0;bn, . . . ,bk+2,bk+1 +ak,ak+1, . . .K and v′n = JAnJv′
has the dual regular λ -fraction v′n =[bn+1,bn+2, . . .
]∗. To simplify the notation we assumek = 0, i.e. a0 + b1 6= 0. Since cq (u′) ∈ Aq and c∗q (v′) ∈ A ∗
q it is clear that any forbiddenblock in u′n must include the term a0 + b1. Let n0 ≥ 1 be larger than the length of thelargest forbidden block. If q ≥ 5 then by Lemma 7 it is clear that we may choose n ≥ n0large enough so that rewriting u′n into a regular λ -fraction does not change the beginningof u′l , up to bn−n0 .
If q = 4 and it is not the case that u′ =[±1−b1;(±2)
]and v′ =
[b1,±1,(±2)
]∗ for some±b1 ≤−1 (i.e. u′ and v′ have the same tail as ±r), then by Lemma 8 we know that we canchoose n large enough so we can rewrite u′n completely without changing the head u′(n−n0)for some n0 ≥ 0.
If q = 3 then a j 6=±1 for j 6= 0 and b j 6=±1 for all j. Hence there are only three kinds off.b.’s possible in u′n for q = 3. Either the f.b. starts with b2 =±2 and ±(b1 +a0)≥ 1 or itstarts with b1 +a0 =±1 or b1 +a0 =±2 and ±a1 ≥ 2. We can thus apply Lemma 9 andin case v′ and u′ are not of the form v′ =
[b1,2,3
]∗ and u′ =[1−b1;3
]for some b1 ≤−1
we can choose n large enough that rewriting of u′n does not change the head u′(n−n0)for
some n0 ≥ 0.
After a complete rewriting (if necessary) which does not change the beginning of u′n up tobn−n0 we may assume that u′n =
[bn,bn−1, . . . ,bn−n0, a1, a2, . . .
]∈Aq and v′n =
[bn+1,bn+2, . . .
]∗ ∈A ∗
q . Hence C(u′n,v′n) =
[. . . ,bn+2,bn+1 bn, . . . ,bn−n0, a1, a2, . . .
]and since n0 is larger
than the length of any forbidden block it is clear that C(u′n,v′n) ∈ Bq, i.e. (u′n,v
′n) ∈ Ω

24 D. MAYER AND F. STRÖMBERG
or equivalently S (u′n,v′n) ∈ Ω∗ and hence S (u′n,v
′n) = S
(S (Anu,Anv)
)= (Anu,Anv) ∈ Ω∗
with An = T bnST bn−1S · · · T b1S ∈ Gq.
We now have to treat the special cases which are left. Without loss of generality weassume that we have f.b. containing a 1, i.e. we assume the plus sign in the statement ofthe theorem. The case of minus sign is analogous.
Suppose that q = 3, v′ =[b1,2,3
]∗ and u′ =[1−b1;3
]with b1 ≤ −2 (since v′ ∈ A ∗
q ).Then we can rewrite v′ into the following regular λ -fraction
[b1−1,−3
]. Hence u =
Su′ =−v′ = v = ST 1−b1 (r) but we assumed that u 6= v so this case can not happen.
Suppose that q = 4, v′ =[b1,1,2
]∗ and u′ =[1−b1;2
]with b1 ≤ −1 (since v′ ∈ A ∗
q ).Then we can rewrite v′ into the following regular λ -fraction
[b1−1,−2
]. Hence u =
Su′ =−v′ = v = ST 1−b1 (r) but we assumed that u 6= v so this case can not happen.
Remark 11. In the previous lemma we actually showed that for any u ∈R∞, which in caseq = 3 or 4 is not Gq-equivalent to ±r, there exists a B ∈ Gq such that (Bu,Bu) ∈ Ω∗.
Remark 12. For q = 3 the previous lemma and remark should be compared with Hurwitz[22, §7] (see also [25]). Note that his reduction procedure differs from ours in that he onlyuses the
In fact, one can do slightly better than in the previous Lemma by using the importantproperty of the number r, namely that r and −r are Gq-equivalent but not orbit-equivalent,i.e. O∗ (r) 6= O∗ (−r) (cf. Lemmas 14 and 15). Using the explicit map identifying r and−r one can show that it is possible to reduce any geodesic to one with endpoints in Ω∗
without the upper horizontal boundary.
Lemma 22. If (x,y) ∈ Ω∗ and y has a dual regular expansion with the same tail as −rthen there exists A ∈ Gq such that (Ax,Ay) ∈ Ω∗ and Ay has the same tail as r.
Proof. Using Fq we may assume that y = −r and Sx ∈ Iκ . Consider even q. Let A :=T−1ST−1 with A(−r) = r (recall that−R = SR). Set y′ = Ay = r and x′ = Ax. By Remark 9Iκ = Ih =
[− 1
λ,0)
hence if Sx∈Ih then x≥ λ , T−1x≥ 0, ST−1x < 0, T−1ST−1x <−λ
and finally ST−1ST−1x ∈(0, 1
λ
)⊆I−h. Hence (Sx′,−y′) ∈ Ω∞.
Consider odd q ≥ 5. There are three cases to consider if y =−r and Sx ∈Iκ = I2h+1 =[φ2h,0) =
[−1
λ+1 ,0)
(cf. Remark 10): We have cq (Sx) =[a1,a2, . . .
]with either a1 ≥ 3 or
cq (Sx) =[2,1 j,a j+2, . . .
]for some 0≤ j≤ h−1 for a j+2 6= 1 or cq (Sx) =
[2,1h,ah+2, . . .
]for ah+2 ≤ −1. In the first case, set A = T−1, y′ = T−1y = −R and x′ = T−1x. ThenSx ∈
[− 1
3λ,0), x ∈ [3λ ,∞), x′ = T−1x ∈ [2λ ,∞) and Sx′ ∈
[− 1
2λ,0)⊆[−λ
2 ,0)
. Hence(Sx′,R) ∈Ω∞. In the second case, unless j = h−1, ah+1 = 2, ah+2 = · · ·= a2h+1 = 1 and

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 25
a2h+2 ≥ 1 we also set A = T−1, y′ = −R and x′ = Ax. Thus cq (Sx′) =[1 j+1,a j+2, . . .
]∈
A0,q and it follows that Sx′ ∈[−λ
2 ,0)
and (Sx′,R) ∈ Ω∞.
In the remaining two cases, set A = T−1 (ST−1)h ST−2, y′ = Ay = r and x′ = Ax. Then
Sx′ = SAx =(ST−1)h+1 ST−2T 2 (ST ) j ST a2+ j · · ·(0) =
(ST−1)h+1− j T a2+ j ST a3+ j · · ·(0).
If j = h then cq (Sx′) =[a j+2−1, . . .
]∈ A0,q and if j = h− 1, ah+1 = 2, ah+2 = · · · =
a2h+1 = 1 and a2h+2 ≥ 1 then Sx′ = J−1,1h+1,a2h+1, . . .K which is rewritten into J−2,(−1)h ,a2h+1−1, . . .K which is either regular or contains a new f.b. beginning at a2h+1 − 1 = 1. In anycase, by Lemma 7 it is clear that after rewriting any f.b. in Sx′ completely we eitherget cq (Sx′) =
[−2,(−1)h ,a2h+1−1, . . .
]or cq (Sx′) =
[−2,(−1)h−1 ,−2, . . .
]and in both
cases C(Sx′,−y′) ∈Bq .
If q = 3 and y =−r then there are two possibilities, either Sx ∈(−1
2 ,−13
)or Sx ∈
[−1
3 ,0).
In the first case we let A = T−1ST−2 so that y′ = Ay = r and Sx′ = ST−1ST−2x. Since x ∈(2,3) it is clear that ST−1ST−2x ∈ ST−1S (0,1) = ST−1 (−∞,−1) = S (−∞,−2) =
(0, 1
2
)hence (Sx′,−y′) ∈ Ω∞. In the second case, let A = T−1. Then y′ = −r− 1 = −R andSx′ = ST−1x ∈ ST−1 (3,∞) = S (2,∞) =
(−1
2 ,0)
so (Sx′,−y′) ∈ Ω∞.
In all cases we have shown that (Sx′,−y′) ∈ Ω∞, i.e. (x′,y′) ∈ Ω∗ and y′ =−R or r.
3.7. Geodesics and geodesic arcs
If γ (ξ ,η) is a geodesic in H oriented from η to ξ (cf. Section 1.1) and A ∈ PSL2(R)we define the geodesic Aγ as Aγ = γ (Aξ ,Aη) . If (ξ ,η) ∈ Ω∗ we associate to (ξ ,η) abi-infinite sequence (code) to γ , C(γ) = C S (ξ ,η) = cq (−η) .c∗q (Sξ ) ∈Bq.
Definition 8. For an oriented geodesic arc c on H we let c denote the unique geodesiccontaining c and preserving the orientation, for instance L1 = z = λ
2 + iy∣∣y > 0 oriented
upwards. Let c± denote the forward and backward end points of c and let −c denote thegeodesic arc with endpoints −c±. Here −c should not to be confused with the geodesic cwith reversed orientation, denoted by c−1.
For z,w ∈ H ∪ ∂H denote by [z,w] the geodesic arc oriented from z to w including theendpoints in H .
Definition 9. Let
Bq =
ζ ∈Bq |σn
ζ(−)
6= c∗q (−r) , ∀n ≥ 0
be the set of bi-infinite sequences which does not have the same past as −r and let
ϒ =
γ | C(γ) ∈Bq
.
Lemma 23. The coding map C : ϒ →Bq is a homeomorphism.

26 D. MAYER AND F. STRÖMBERG
Proof. ϒ is identified with the set of endpoints in Ω∗, the map S : Ω∗→ Ω∞ in Definition7 is a continuous bijection and by Corollary 1 and 3 respectively Lemmas 20 and 22 it isclear that C : Ω∞ → Bq is well-defined, continuous and that each point (ξ ,η) ∈ Ω∞ hasa unique code unless η is equivalent to ±r in which case it might have two codes. Sinceone of these is disregarded in the definition of B
q it is clear that C = C S : ϒ →Bq is a
homeomorphism. For the case of Gq = PSL2(Z) see also [25, p. 105].
The set ϒ contains representatives of all geodesics on H /Gq. This property is an im-mediate corollary to the following Lemma which additionally also provides a reductionalgorithm.
Lemma 24. Let γ be a geodesic on the hyperbolic upper half-plane with endpoints γ−,γ+ ∈R∞, γ− 6= γ+ and γ− =
[b0;b1, . . .
]∗. Then there exists an integer n ≥ 0 and A ∈ Gq such
thatγ′ = AT−bnS · · · T−b1ST−b0γ
and C(γ ′) ∈Bq . Here A is one of the maps Id, T−1 and T−1ST−1 for even q, respectively
T−1 (ST−1)h ST−2 for odd q.
Proof. This is an immediate consequence of Lemmas 21 and 22. Note that T−b0γ− =[b1,b2, . . .
]∗ and F∗q
nT−b0γ− = T−bnS · · · T−b1ST−b0γ−.
Corollary 4. If γ∗ is a geodesic on H /Gq with all lifts having endpoints in R∞ then ϒ
contains an element of π−1 (γ∗).
Lemma 25. If for ξ ∈ Iq cq (ξ ) =[a1, . . . ,an
]∈ A0,q, then ξ is the attractive fixed point
of the hyperbolic map A = ST a1 ST a2 · · · ST an with conjugate fixed point ξ ∗ = η−1, wherec∗q (η) =
[an,an−1, . . . ,a1
]∗ ∈A ∗0,q. Conversely, if ξ is an hyperbolic fixed point of B∈Gq,
then cq (ξ ) is eventually periodic.
Proof. It is not hard to show, that Aξ = ξ and Aη−1 = η−1. Since η ∈ IR, with R≤ 1 < 2λ
it is clear that ξ ∗ 6= ξ and hence A is hyperbolic. The other statement in the Lemma is easyto verify by writing B in terms of generators, rewriting any forbidden blocks and goingthrough all cases of non-allowed sequences, e.g. if B ends with an S.
Since the geodesic γ (ξ ,η) is closed if and only if ξ and η are conjugate hyperbolic fixedpoints and since r and −r are Gq-equivalent we conclude from Lemma 25 that there isa one-to-one correspondence between closed geodesics on Mq = H /Gq and the set ofequivalence classes, under the shift map, of purely periodic regular λ -fractions except forthe one containing −r.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 27
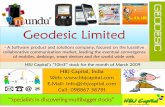
FIGURE 2. Domain of reduced geodesics Ωr
Ωs(q = 5)
Ωs(q = 6)
Remark 13. Because Ω∞ only contains points with infinite λ -fractions, the set ϒ does notcontain lifts of geodesics which disappear out to infinity, i.e. with one or both endpointsequivalent to ∞. The neglected set however corresponds to a set in T 1M of measure zerowith respect to any probability measure invariant under the geodesic flow. See e.g. theintroduction of [24].
The subshift of finite type(B
q,σ)
is conjugate to the invertible dynamical system(ϒ, Fq
).
Here Fq : ϒ→ ϒ is the map naturally induced by Fq acting on Ω∞: i.e. if γ = γ (ξ ,η) , thenF±1
q (γ) = γ (ξ ′,η ′) where (ξ ′,η ′) = S F±1q S−1 (ξ ,η). Using the same notation for
both maps should not lead to any confusion.
3.8. Reduced geodesics
Definition 10. A geodesic γ (ξ ,η) with ξ ,η ∈R∞ is said to be reduced if C(γ) ∈Bq and
|ξ |> 3λ
2 or ξ η < 0. Denote by ϒr the set of reduced geodesics and by Ω∗r the correspond-
ing set of (ξ ,η) ∈ Ω∗. Then Ω∞r := S (Ω∗
r )⊆ Ω∞ and Ωr = Ω∞r , the closure of Ω∞
r in R2,i.e. Ω∞
r = Ωr∩Ω∞, and Bq,r = C(ϒr)⊆B
q.
Remark 14. We observe that for odd q, by Lemma 2, φκ−1 =[2,1h]= −1
λ+1 and thus− 23λ
<
φκ−1. For even q on the other hand φκ−1 = −1λ
and since −1λ
< −23λ
we have φκ−1 <− 23λ
.Hence the shape of Ω∞
r =(u,v) ∈ Ω∞ | |u| ≤ 2
3λor uv < 0
differs slightly between even
and odd q. Set Λ1 :=(−λ
2 ,0)× [0,R] and Λ2 :=
(0, 2
3λ
)× [0,−r] for even q respectively
Λ2 := (0,φκ−1)× [0,−r] and Λ3 :=(φκ−1,
23λ
)× [0,rκ−1] for odd q. Then we have:

28 D. MAYER AND F. STRÖMBERG
Ωr =k⋃
j=1
Λ j∪−Λ j,
with k = 2 for even and 3 for odd q. See also Figure 2 where Ωr is displayed for q = 5and q = 6 as a subset of Ω. An even more convenient description of the set of reducedgeodesics is in terms of the bi-infinite codes of their base points (ξ ,η)
Bq,r =
[. . .b2,b1 a0,a1, . . .
]∈B
q∣∣ |a0| ≥ 2, or a0b1 > 0
.
Lemma 26. If γ is a geodesic on H with C(γ) ∈ Bq then there exists an integer k ≥ 0
such that Fkq γ is reduced.
Proof. For k≥ 0 let γk := Fkq γ , cq
(γk+)=[ak;ak+1, . . .
]and c∗q
(γk−)=[ak−1, . . . ,a0,b1, . . .
]∗.If |ak| ≥ 2 then
∣∣γk+∣∣ > 3λ
2 and if ak−1ak < 0 then γk+γk
− < 0. In both cases by definitionFk
q γ ∈ ϒr. Since an infinite sequence of 1’s or −1’s is forbidden, it is clear that there existsa k ≥ 0 such that one of these conditions apply.
Combining the above lemma with Lemma 21 we have shown the following lemma.
Lemma 27. Let γ (ξ ,η) be a geodesic on the hyperbolic upper half-plane with ξ 6= η ∈R∞. Then γ is Gq-equivalent to a reduced geodesic.
4. CONSTRUCTION OF THE CROSS-SECTION
As a cross section for the geodesic flow on the unit tangent bundle T 1M of M whichcan be identified with Fq× S1 modulo the obvious identification of points on ∂Fq× S1,we will take a set of vectors with base points on the boundary ∂Fq directed inwards withrespect to Fq. The precise definition will be given below. For a different approach toa cross section related to a subgroup of Gq see [14]. For the sake of completeness weinclude the case q = 3 in our exposition but it is easy to verify that our results in terms ofthe cross-section, first return map and return time agree with the statements in [24, 25].
4.1. The cross section
Definition 11. Consider the fundamental domain Fq and its boundary arcs L0 and L±1 as
in Definition 1. For the construction of the cross section we use the arcs L′±1 =[ρ±,±λ
2
],
i.e. L±1 = L±1 ∪L′±1 respectively L±2 = ± [ρ,λ ] = T±1SL±1 and L±3 = ± [ρ,ρ +λ ] =
T±1L0 .

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 29
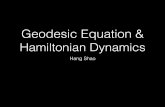
FIGURE 3. Cross-Section (q = 5)
−R −r λ−λ
L1L−1
L2
L−2
L0 L3
λ+1
L−3
0 3λ
2
γ1
Definition 12. We define the following subsets of T 1M :
Γr =(z,θ) ∈ Lr×S1 | γz,θ (s) directed inwards at z
, r = 0,±1,
Σj =
(z,θ) ∈ Γ j |γz,θ = γ (ξ ,η) ∈ ϒ, |ξ |> 3λ
2orξ η < 0
,−1 ≤ j ≤ 1,
Σ±2 =
(z,θ) ∈ Γ±1 |γz,θ /∈ ϒ, γ = T±1Sγz,θ ∈ ϒ,
3λ
2< γ+ ≤ λ +1
,
Σ±3 =
(z,θ) ∈ Γ0 |γz,θ /∈ ϒ, γ = T±1
γz,θ ∈ ϒ
.
If q is even let Σ := ∪2j=−2Σ j and if q ≥ 5 is odd let Σ := ∪3
j=−3Σ j. If q = 3 we drop therestriction on γ+ in the definition of Σ±2 and set Σ = ∪2
j=−2Σ j.
We will show that there is a one-to-one correspondence between Σ and the set of reducedgeodesics.
Lemma 28. There exists a bijection P : ϒr → Σ defined through P (γ) := (z,θ) ∈ Σ withz = γ (s) ∈ ∂Fq for some s ∈ R and θ given by Argγ (s) = θ .
Proof. Consider Figure 3 and a geodesic γ1 (ξ ,η) from η ∈ [−R,−r) to ξ > 3λ
2 . It is clearthat either γ1 intersects L−1∪L0 inwards or L2 from the left to the right. Let z = γ (s) bethis intersection and set θ = Argγ (s). In the first case we get Pγ = (z,θ) ∈ Σ−1 ∪Σ0.In the second case we either get Pγ = (z,θ) ∈ Σ2 if ξ ∈
(3λ
2 ,λ +1)
or, if q is odd and

30 D. MAYER AND F. STRÖMBERG
ξ > λ +1, we get Pγ = (z′,θ ′) ∈ Σ3, where z′ = γ (s′) ∈ L3 and θ ′ = Argγ (s′), since byLemma 47 γ must intersect L3. Remember, that for q even, r = 1−λ , so γ can not intersectL3 to the right of λ
2 . Consider next a geodesic γ (ξ ,η) with η ∈ [−R,0) and ξ ∈(
2λ, 3λ
2
).
Since the geodesic SL−1 from 0 to 2λ
intersects ρ , the intersection point of γ and L1 mustlie above ρ . Hence γ intersects either L−1 or L0 inwards, i.e. Pγ ∈ Σ−1∪Σ0.
The case ξ < 0 is analogous and the inverse map P−1 : Σ → ϒr is clearly given byP−1 (z,θ) = γz,θ if (z,θ)∈ Σ j, | j| ≤ 1, respectively P−1 (z,θ) = T±1Sγz,θ if (z,θ)∈ Σ±2
and P−1 (z,θ) = T±1γz,θ if (z,θ) ∈ Σ±3.
Definition 13. For (ξ ,η) ∈ Ω∗r we define P : Ω∗
r → Σ by, P (ξ ,η) := Pγ (ξ ,η).
A consequence of Lemma 26 is that for any reduced geodesic we can find an infinite num-ber of reduced geodesics in its forward and backward Fq-orbit (with infinite repetitionsif the geodesic is closed). Furthermore, since the base-arcs L±1 and L0 of Σ consist ofgeodesics, none of whose extensions are in ϒr, it is clear that any reduced geodesic inter-sects Σ transversally. The set Σ thus fulfills the requirements (P1) and (P2) of Definition2 and is a Poincaré (or cross-) section with respect to ϒr. Since any geodesic γ∗ on Mqwhich does not go into infinity has a reduced lift we also have the following lemma.
Lemma 29. π∗ (Σ) is a Poincaré section for the part of the geodesic flow on T 1M whichdoes not disappear into infinity.
From the identification of Σ and Ω∗r via the map P we see that the natural extension Fq
of the continued fraction map Fq induces a return map for Σ, i.e. if z = (z,θ) ∈ Σ thenP Fn
q P−1z ∈ Σ for an infinite number of n 6= 0. We give a geometric description ofthe first return map for Σ and we will later see that this map is in fact also induced by Fq.
Definition 14. The first return map T : Σ→Σ is defined as follows (cf. Figure 4): If z0 ∈Σ
and γ = P−1z0 ∈ ϒr let wnn∈Z be the ordered sequence of intersections in the directionfrom γ− to γ+ between γ and the Gq-translates of ∂F with w0 given by z0. Since γ+ andγ− have infinite λ -fractions they are not cusps of Gq and the sequence wn is bi-infinite. Foreach wn let An ∈Gq be the unique map such that w′
n = Anwn ∈ ∂F and γ ′ = Anγ intersects∂F at w′
n in the inwards direction.
If γ ′ ∈ ϒr and Pγ ′ = z′ we say that z′ ∈ Σ is a return of γ to Σ. If n0 > 0 is the smallestinteger such that wn0 gives a return to Σ we say that the corresponding point PAn0γ = z1 ∈Σ is the first return and the first return map T : Σ → Σ is defined by T z0 = z1 where z1is the first return after z0. Sometimes T : Ω∗
r → Ω∗r given by T = P−1 T P is also
called the first return map.
After proving some useful geometric lemmas in the next section we will show in Section4.3 that the first return map T is given explicitly by powers of Fq.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 31
FIGURE 4. Illustration of the first return map
0 1−1 λ
2−λ
2λ−λ
L1L−1
L2L−2
L0
Fq
γ
ρ
γ′
w0 = z0
w3z1
T
w1
w−1
w2
γ+γ−
>
γ′ = Fqγ = ST−2γ
z1 = ST−2w3(z1,θ1) = T (z0,θ0)
FIGURE 5.
η ξc
γ = γz,θ
z = γ(t0) = γ(s)
t0
rθ
4.2. Geometric lemmas
Lemma 30. The map z = (z,θ) 7→(γz,θ ,s
) ∼= (ξ ,η ,s) where γz,θ = γ (ξ ,η) , γz,θ (s) = zand Argγz,θ (s) = θ is a diffeomorphism for θ 6=±π
2 .
Proof. Let z = x + iy, y > 0, and θ ∈ [−π,π) be given. First we want to show that thereexist ξ ,η ∈ R∗ and s ∈ R such that for the geodesic γ = γ (ξ ,η) one finds γ (s) = z andArgγ (s) = θ . Without loss of generality we may assume that θ ∈
(−π
2 , π
2
)so that η < ξ .
Set c = 12 (η +ξ ) , r = 1
2 (ξ −η) and parametrize γ as γ (t) = c+ reit , 0 < t < π . It is easyto verify that if c = x + y tanθ , r = y
cosθand t0 = θ + π
2 then γ (t0) = z and Argγ (t0) = θ .See Figure 5. To find the arc length parameter s we use the isometry A : z 7→ −z+(c−r)
z−(c+r)
mapping γ to iR+, Aγ (t) = i(tan t
2
)−1 and A(c+ ir) = i. It is then an easy computationto see that s(θ) = d (z,c+ ir) = d
(i/ tan t
2 , i)
= ln tan t2 = ln tan
(θ
2 + π
4
). From the above
formulas one can easily deduce differentiability of the map (z,θ)→ (ξ ,η ,s) as well as itsinverse away from θ =±π
2 .

32 D. MAYER AND F. STRÖMBERG
Corollary 5. The map (x,y,θ) → (ξ ,η ,s) of Lemma 30 gives a change of variables onT 1H which is diffeomorphic away from θ = ±π
2 . Explicitly, ξ = x + y tanθ + y|cosθ | ,
η = x+ y tanθ − y|cosθ | , s = ln tan
(θ
2 + π
4
)and the corresponding Jacobian is
∣∣∣ ∂ (x,y,θ)∂ (ξ ,η ,s)
∣∣∣=12 cos2 θ .
Proof. This follows from the proof of Lemma 30 and a trivial computation.
Definition 15. For z ∈H and ξ ∈ R define
g(z,ξ ) =|z−ξ |2
ℑzand for γ a geodesic with endpoints γ+ and γ− set g(z,γ) = g(z,γ+) .
Lemma 31. If A ∈ PSL2(R) then g(Az,Aξ ) = g(z,ξ )A′ (ξ ) .
Proof. Let A =(
a bc d
), then ℑAz = ℑz
|cz+d|2, |Az−Aξ |2 = |z−ξ |2
|cz+d|2|cξ+d|2and since ξ ∈ R
g(Az,Ax) = g(z,ξ )(cξ +d)−2 = g(z,ξ )A′ (ξ ) .
Lemma 32. Let γ = γ (ξ ,η) be a geodesic with ξ ,η ∈ R, η < ξ and suppose that z j,j = 1,2, with η ≤ ℜz1 < ℜz2 ≤ ξ are two points on γ . Then
d (z1,z2) = lng(z1,ξ )− lng(z2,ξ ) = ln
[ℑz2
ℑz1
∣∣∣∣z1−ξ
z2−ξ
∣∣∣∣2]
.
Proof. It is easy to verify, that the hyperbolic isometry B : w 7→ w−η
ξ−w maps γ to iR+ and if
a < b then d (ia, ib) =∫ b
adyy = ln
(ba
). Thus if ℑz j = y j we get
d (z1,z2) = d (Bz1,Bz2) = d (iℑBz1, iℑBz2) = ln
[y2
y1
∣∣∣∣z1−ξ
z2−ξ
∣∣∣∣2]
.
Lemma 33. Let γ = γ (ξ ,η) be a geodesic with ξ ,η ∈R, η < 0 < ξ and let z = γ ∩ iR bethe intersection of γ with the imaginary axis. Then
z = i√−ξ η .

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 33
Proof. With r = 12 (ξ −η) and c = 1
2 (ξ +η) any point on γ is given by γ (t) = c+ reit forsome 0≤ t ≤ π . Suppose z = γ (t0), then ℜγ (t0) = c+ r cos t0 = 0 and hence cos t0 =−c
r .But then sin2 t0 = 1− c2
r2 and therefore z = ir sin t0 = i√
r2− c2 = i√−ξ η .
Lemma 34. Let γ = γ (ξ ,η) be a geodesic with ξ ,η ∈ R, η < ξ . For ω a geodesicintersecting γ at w ∈H let A =
(a bc d
)∈ PSL2(R) be such that Aω = iR+. Then
w = w(ξ ,η) =1
ad +bc+ac(ξ +η)
[acξ η −bd + εi
√−lA (ξ ) lA (η)
], and
g(w,γ) =|w−ξ |2
ℑw= (ξ −η)
√− lA (ξ )
lA (η)
where lA (ξ ) = (aξ +b)(cξ +d) and ε = sign(ad +bc+ac(ξ +η)).
Proof. According to Lemma 31 g(w,γ) = g(A−1z,A−1γ ′
)= g(z,γ ′)A−1 ′ (Aξ ) where γ ′ =
Aγ and z = Aw ∈ iR. By Lemma 33 z = i√−ξ ′η ′ with ξ ′ = Aξ and η ′ = Aη . We choose
A, i.e. the orientation of γ ′ such that η ′ < 0 < ξ ′ and hence sign(aξ +b) = sign(cξ +d)and sign(aη +b) =−sign(cη +d). Then
w = A−1(
i√−Aξ Aη
)=
di√|Aξ Aη |−b
a− ci√|Aξ Aη |
=i√|Aξ Aη |−ab− cd |Aξ Aη |
a2 + c2 |Aξ Aη |
=−(ab |cξ +d| |cη +d|+dc |aξ +b| |aη +b|)+ i
√−lA (ξ ) lA (η)
c2 |(aξ +b)(aη +b)|+a2 |cξ +d| |cη +d|
=ε (ab(cξ +d)(cη +d)−dc(aξ +b)(aη +b))+ i
√−lA (ξ ) lA (η)
c2ε (aξ +b)(aη +b)−a2ε (cξ +d)(cη +d)
=i√−lA (ξ ) lA (η)− ε [ξ ηca−bd]−ε [(ξ +η)ca+(cb+ad)]
=acξ η −bd− iε
√−lA (ξ ) lA (η)
ac(ξ +η)+(ad +bc)
where ε = sign((aξ +b)(aη +b)) =−sign(ac(ξ +η)+ad +bc) since w ∈H . For thefunction g we now have
g(z,γ ′)
=|z−ξ ′|2
ℑz=
ξ ′2−ξ ′η ′√−ξ ′η ′
=(ξ′−η
′)√ ξ ′
−η ′ .

34 D. MAYER AND F. STRÖMBERG
Since A−1 ′ (Aξ ) = (−cAξ +a)−2 = (cξ +d)2 Lemma 31 implies that
g(w,γ) =(ξ′−η
′)√ ξ ′
−η ′ (cξ +d)2 =(
aξ +bcξ +d
− aη +bcη +d
)√√√√ aξ+bcξ+daη+bcη+d
(cξ +d)2
= ((aξ +b)(cη +d)− (aη +b)(cξ +d))
√(aξ +b)(cξ +d)(aη +b)(cη +d)
= (ξ −η)
√(aξ +b)(cξ +d)(aη +b)(cη +d)
= (ξ −η)
√− lA (ξ )
lA (η).
Application of the previous Lemma to vertical or circular geodesics yields the followingcorollaries:
Corollary 6. Let γ (ξ ,η) be a geodesic with η < ξ . Then
a) if η < a < ξ for some a ∈R, then γ and the vertical geodesic ωv = a+ iR+ intersect at
Zv (ξ ,η) = a+ i√
(ξ −a)(−η +a) ∈H , and
gv (ξ ,η) = g(Zv,γ) = (ξ −η)
√−ξ −a
η −a;
b) if η < c−ρ < ξ < c+ρ for some c ∈ R and ρ ∈ R+, then γ and the circular geodesicωc with center c and radius ρ intersect at
Zc (ξ ,η) =ξ η +ρ2− c2
ξ +η −2c+
i|ξ +η −2c|
√((ξ − c)2−ρ2
)(ρ2− (η − c)2
)∈H , and
gc (ξ ,η) = g(Zc,γ) = (ξ −η)
√− (ξ − c)2−ρ2
(η − c)2−ρ2.
The subscripts „v“ and „c“ above refer to intersections with vertical and circular geodesicsrespectively.
Corollary 7. Let γ = γ (ξ ,η) be an arbitrary geodesic on H with ξ ,η ∈R. For Z j (ξ ,η)=γ ∩L j set g j (ξ ,η) = g
(Z j,γ
), −3 ≤ j ≤ 3. If Z j (ξ ,η) exists, the following formulas

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 35
hold:
Z0 (ξ ,η) =1
ξ +η
(1+ξ η + εi
√(ξ 2−1)(1−η2)
), ε = sign(ξ +η) ,
Z±1 (ξ ,η) =∓λ
2+ i
√(ξ ∓ λ
2
)(−η ± λ
2
),
Z±2,±3 (ξ ,η) =1
ξ +η ∓2c
(ξ η +ρ
2− c2 + εi
√((ξ ∓ c)2−ρ2
)(ρ2− (η ∓ c)2
))where ε = sign(x+ y∓2c) .
Furthermore
g0 (ξ ,η) = (ξ −η)
√ξ 2−11−η2 ,
g±1 (ξ ,η) = (ξ −η)
√√√√−ξ ∓ λ
2
η ∓ λ
2
,
g± j (ξ ,η) = (ξ −η)
√− (ξ ∓ c)2−ρ2
(η ∓ c)2−ρ2, j = 2,3.
Here (ρ,c) =(λ − 1
λ, 1
λ
)for j = 2 and (1,λ ) for j = 3.
Proof. Taking A0 = 1√2
(1 −11 1
), A±1 =
(1 ∓ λ
20 1
)and A±2 = 1√
2ρ
(−1 ±c−ρ
1 ∓c−ρ
)it is easy to
verify that A jL j = iR+ preserving the orientation.
Lemma 35. Let γ = γ (ξ ,η) be a geodesic with ξ ,η ∈ R. Then γ intersects the verticalarc L1 if and only if η < λ
2 < ξ and δ (ξ ,η) < 0 where
δ (ξ ,η) = η − ξ λ −22ξ −λ
.
For even q we have in particular δ (ξ ,η) = η − (T S)h+1ξ .
Proof. It is clear, that γ intersects L1 if and only if the intersection with L1 = λ
2 + iR+ is ata height above sin π
q = ℑρ . By Lemma 6 the point of intersection is given by w(ξ ,η) =
λ
2 + i√(
ξ − λ
2
)(−η + λ
2
). We thus need to check the inequality
(ξ − λ
2
)(−η + λ
2
)>

36 D. MAYER AND F. STRÖMBERG
sin2 π
q . With η < λ
2 < ξ it is clear that ℑw decreases as η increases for ξ fixed. Usingλ
2 = cos π
q we see, that(ξ − λ
2
)(λ
2−η
)= sin2 π
q= 1− λ 2
4⇔
λ −2η =4−λ 2
2ξ −λ⇔ η =
λξ −22ξ −λ
= Aξ
where A = 14−λ 2
(λ −22 −λ
)∈ SL2(R). Hence ℑw > sin π
q ⇔ η < Aξ ⇔ δ (ξ ,η) < 0.
Observe, that Aρ = ρ and A2 = Id, i.e. A is elliptic of order 2. The stabilizer Gq,ρ of ρ inGq is a cyclic group with q elements generated by T S. For even q = 2h+2 one can use theexplicit formula (2) to verify that A = (T S)h+1 ∈ Gq. For odd q on the other hand there isno element of order 2 in Gq,ρ , so A /∈ Gq.
Corollary 8. Let γ = γ (ξ ,η) be a geodesic with ξ ,η ∈R. Set δn (ξ ,η) := δ (ξ −nλ ,η −nλ ).Then γ intersects the line T nL1 if and only if η <
(n+ 1
2
)λ < ξ and δn (ξ ,η) < 0.
4.3. The first return map
Our aim in this section is to obtain an explicit expression for the first return map T :Σ → Σ. The notation is as in Definition 14, see also Figure 4. The main idea is to usegeometric arguments to identify possible sequences of intersections wn and then usearguments involving regular and dual regular λ -fractions to determine whether a particularwn corresponds to a return to Σ or not.
Lemma 36. If ξ =[1;1 j,a j+1,a j+2
]with cq (Sξ ) =
[1 j+1,a j+1, . . .
]∈ A0,q then ξ ∈(
(T S) jλ ,(T S) j 3λ
2
)if a j+1 ≤−1 respectively ξ ∈
((T S) j+1 3λ
2 ,(T S) jλ
)if a j+1 ≥ 2.
Proof. Note that ξ = (T S) jξ ′ where cq (ξ ′) =
[1;a j+1,a j+1, . . .
]. If a j+1 ≤−1 then ξ ′ ∈(
λ , 3λ
2
)and since T Sx = λ− 1
x is strictly increasing there ξ = (T S) jξ ′ ∈ (T S) j
(λ , 3λ
2
)=(
(T S) jλ ,(T S) j 3λ
2
). If on the other hand a j+1 ≥ 2 then ξ ′′ = ST−1ξ ′ ∈
(3λ
2 ,∞)
and ξ =
(T S) jξ ′ = (T S) j+1
ξ ′′ and therefore ξ ∈ (T S) j+1(
3λ
2 ,∞)
=((T S) j+1 3λ
2 ,(T S) jλ
).
Definition 16. Define the geodesic arcs
χ j := (T S) j L2 = (T S) j+1 T L−1, 0≤ j ≤ h, ω j := (T S) j L3 = (T S) j+1 L0, 0≤ j ≤ h+1

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 37
FIGURE 6. Geodesics through the point ρ for q = 7 and 8 (h = 2 and 3)
0 α0α1α2 β0β1β2 δ0δ1δ2
ω0
ω1ω2
χ0
χ1χ2
ρ
ρ∗
α0α1α2 β0β1β1 δ0δ1δ2
ω0
ω1
ω2
χ0
χ1χ2
ρ
and set α j := (T S) jλ , β j := (T S) j 3λ
2 and δ j := (T S) j (λ +1). Then χ j =[ρ,α j
], ω j =[
ρ,(T S) j (ρ +λ )]⊂[ρ,δ j
]and α j < β j < δ j, 0 ≤ j ≤ h + 1. Note that αh = λ
2 and
χh = L′1 for even q while δh+1 = λ
2 and ωh+1 ⊆ L′1 for odd q (see Figure 6).
Lemma 37. If γ = γ (ξ ,η) ∈ ϒ with cq (ξ ) =[1;1 j,a j+1, . . .
]then γ has the following
sequence of intersections with Gq∂F after passing L1: ω0,χ0, . . . ,ω j−1,χ j−1,ω j if ξ ∈(α j,β j
)(a j+1 ≤−1) respectively ω0,χ0, . . . ,ω j,χ j if ξ ∈
(β j+1,α j
)(a j+1 ≥ 2).
Proof. See Figure 6. Since all arcs involved are hyperbolic geodesics it is clear that γ doesnot intersect any other χi’s or ωi’s than those mentioned. Suppose that ξ ∈
(α j,β j
), then
after χ j−1 the geodesic γ may intersect either ω j or its extension, i.e. [(T S) j (ρ +λ ) ,δ j].If it intersects this extension it has to pass first through the arc [(T S) j T ρ,α j−1]. But thecompletion of this arc is clearly (T S) j T L1 =
[β j,α j−1
]and hence γ can not intersect this
arc and must pass through ω j. The second case is analogous, except that we do not careabout whether the next intersection is at ω j+1 or (T S) j+1 T L1.
Lemma 38. If γ (ξ ,η) ∈ ϒr and cq (ξ ) =[1;1 j,a j+1, . . .
]then T γ (ξ ,η) = F j+1
q γ (ξ ,η) .
Proof. Let (z,θ) = P (ξ ,η) , then z∈ L−1∪L0 and by Lemma 37 the subsequent intersec-tions are
w0,w1,w2, . . . ,w2 j+1,w2 j+2
if a j+1 ≤ −1 and
w0,w1,w2, . . . ,w2 j+2,w2 j+3
if a j+1 ≥ 2. It is also easy to verify, that the corresponding maps are A2i+1 = T−1 (ST−1)i
and A2i =(ST−1)i. Note that A2i+1 = T−1A2i and that A2iγ = Fq
iγ, 0 ≤ i ≤ j + 1. Itis thus clear, that A2iγ ∈ ϒ and A2i+1γ /∈ ϒ for 1 ≤ i ≤ j + 1. If (ξi,ηi) = (Aiξ ,Aiη) ,then cq (ξ2i) =
[1;1 j−i,a j+1, . . .
]and c∗q (η2i) =
[(−1)i ,b1, . . .
]∗ and hence A2iγ /∈ ϒr for1 ≤ i ≤ j but A2 j+2γ ∈ ϒr. Thus in both cases the first return is given by w2 j+2 and thereturn map is T = Fq
j+1.

38 D. MAYER AND F. STRÖMBERG
FIGURE 7. Geodesics leaving the Poincaré section (q=7)
L−1 L1
L2
L0 L3
0 λ−R −r
ρ
w0
w1
w2
w3
γB
γA
γC
γD
T ρ
Definition 17. Define K : R \ Iq → N and n : R \ Iq → Z as follows: if a0 ∈ Z∗, ε =sign(a0) and ξ =
[a0;(ε)k−1 ,ak, . . .
]with k ≥ 1 then K (ξ ) := k and
n(ξ ) :=
ε ·3, k = h+1, qodd,
ε ·2, k = h, ah ≥ 2, qeven,
ε ·1, k = h+1, qeven,
0, else.
We also have to consider the return map for the second type of reduced geodesics.
Lemma 39. For z ∈ Σ with P−1z = (ξ ,η) ∈ Ω∗r and |ξ | > 3λ
2 one has T z = P Fkq
P−1z ∈ Σn where k = K (ξ ) and n = n(ξ ).
Proof. Consider z0 = Pγ ∈Σ with γ = γ (ξ ,η)∈ ϒr and assume without loss of generalitythat ξ > 0 with cq (ξ ) =
[a0;1 j,a j+1, . . .
]for some j ≥ 0, a j+1 6= 1 and a j+1 6=±1 if j = 0
(the case of −1’s is analogous). Recall the notation in Definition 14, in particular thesequence wnn∈Z and the corresponding maps An ∈ Gq. It is clear, that wn gives a returnif and only if Anγ ∈ ϒr.
There are two cases to consider: Either z0 ∈ Σ−1∪Σ0 respectively z0 ∈ Σ−1∪Σ0∪Σ3 in thecase of odd q or z0 ∈Σ2. In Figure 7 these different possibilities are displayed, PγA ∈Σ−1,PγB ∈ Σ0,PγC ∈ Σ2 and PγD ∈ Σ3. It is clear, that if z0 ∈ Σ2 then w0 = T Sz0 ∈ L2 andthe sequence of wn is essentially different from the case z0 6∈ Σ2 when w0 = z0.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 39
FIGURE 8. Geodesics returning to the Poincaré section (q = 8)
(a0−1)λ a0λ
wa0
wa0+1
wa0
w = wa0+q−1
wa0−1
γEγF
q−2
Case 1: If z0 6∈ Σ2 (see geodesics γA, γB and γD in Figure 7), then wn ∈ T nL−1 for 1≤ n≤k− 1 and k = a0− 1,a0 or a0 + 1 depending on whether z0 ∈ Σ0,1 or Σ3 and whether thenext intersection is on T a0L0 or T a0−1L0. Then either wk ∈ T a0L0 or wk ∈ T a0−1L0 (seegeodesics γE and γF in Figure 8). Since An = T−n for wn ∈ T nL−1 and, as we will show inLemma 43 T−nγ /∈ ϒ none of the wn ∈ T nL−1 for 1 ≤ n ≤ k−1 gives a return to Σ. Thereare now two possibilities:
(i) If wk ∈ T a0L0, then Ak = ST−a0 and γk = Akγ = Fqγ . If j = 0 it is clear thatγ ′ ∈ ϒr and T z0 = P Fqγ ∈ Σ0. If j ≥ 1, by Lemma 38 applied to γ ′ we getT z0 = P F j
q γ ′ = P F j+1q γ ∈ Σn(ξ ).
(ii) If wk ∈ T a0−1L0, then we will show in Lemma 45 and 48 that none of thearcs emanating from T a0−1ρ gives a return (cf. Figures 8 and 6) except forthe next return at T a0−1 (ST−1)h+1 L1. Furthermore it follows, that T z0 =P Fk
q P−1z0 ∈ Σn with k = K (ξ ) (here h or h+1) and n = n(ξ ).
Case 2: If z0 ∈ Σ2 then 3λ
2 < ξ < λ +1 and γ must intersect T L1 below T ρ . By the same
arguments as in Case 1 we conclude that the first return is given by wq−1 ∈ T(ST−1)h+1 L1
and T z0 = P Fkq P−1z0 ∈ Σn where k = K (ξ ) and n = n(ξ ) as in Case 1 (ii). In
all cases we see, that the first return map T : Σ → Σ is given by T = P Fkq P−1 or
alternatively by T = Fkq where k = 1, h or h+1 depending on ξ .

40 D. MAYER AND F. STRÖMBERG
By combining Lemma 38 and 39 it is easy to see, that the first return map P is determinedcompletely in terms of the coordinate ξ :
Proposition 1. If z∈ Σ with P−1z = (ξ ,η)∈Ω∗r then T z = P Fq
k P−1z∈ Σn wherek = K (ξ ) and n = n(ξ ).
Having derived explicit expressions for the first return map, in a next step we want to getexplicit formulas for the first return time, i.e. the hyperbolic length between the successivereturns to Σ.
4.4. The first return time
Lemma 40. Let γ = γ (ξ ,η) ∈ ϒr with ξ =[a0;(ε)k−1 ,ak, . . .
](ε = sign(a0)) and Pγ =
z0 = (z0,θ0) and let z1 = T z0. For w0 ∈ γ the point corresponding to z1, i.e. w0 ∈ Gqz1,one has
d (z0,w0) = lng(z0,γ)− lng(z1,T γ
)+2lnF (γ)
where F (γ) = ∏kj=1
∣∣ξ j∣∣ with k = K (ξ ) as in Definition 17 and ξ j = SF j
q Sξ .
Proof. Set γ j := F jq γ = B jγ and w j := B jw0. By Lemma 31 g(w0,γ)= g
(B−1
1 w1,B−11 γ1
)=
g(w1,γ1)ξ−21 . Applying the same formula to g
(w j,γ j
)for j = 1, . . . ,k we get lng(w0,γ) =
lng(z1,T γ
)− 2ln∏
kj=1
∣∣ξ j∣∣. The statement then follows by Proposition 1 and Lemma
32.
Lemma 41. If γ = γ (ξ ,η) is a reduced closed geodesic with cq (Sξ ) =[a1, . . . ,an
]of
minimal period n and ξ j = SF jq Sξ , then the hyperbolic length of γ is given by
(3) l (γ) = 2n
∑j=1
ln∣∣ξ j∣∣=− ln
n
∏j=1
∣∣[a j+1, . . . ,an,a1, . . . ,a j]∣∣2 .
Proof. Denote by(z j,θ j
)∈ Σ the successive returns of γ to Σ and let w j−1 ∈ γ be the
point on γ corresponding to z j. If γ is closed, the set
z j
j≥0 is finite with N +1 elementsfor some N + 1 ≤ n, i.e. zN+1 = z0. It is clear that the length of γ is given by adding upthe lengths of all pieces between the successive returns to Σ and a repeated application of

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 41
Lemma 40 gives us
l (γ) =N
∑j=0
d(z j,w j
)=
N
∑j=0
(lng(z j,T
jγ)− lng
(w j,T
jγ))
=N
∑j=0
(lng(z j,T
jγ)− lng
(z j+1,T
j+1γ)+2lnF
(T j
γ))
= 2N
∑j=0
lnF(T j
γ)
= 2lnn
∏i=1
∣∣SF iqSξ∣∣ .
Remark 15. Formula (3) can also be obtained by relating the length of γ(ξ ,η) to the axisof the hyperbolic matrix fixing ξ and observing that this matrix must be given by the mapFn
q acting on ξ .
In the case of PSL2(Z) and the Gauss (regular) continued fractions formula (3) is well-known.
We are now in a position to discuss the first return time. By Lemma 32 it is clear that we
need to calculate the function g j (ξ ,η) = |w j−ξ |2v j
, where w j = u j + iv j = Z j (ξ ,η) for allthe intersection points in Corollary 7.
Definition 18. Let B ∈ PSL2(R) be given by Bz = 2−λ zλ−2z . Set δn (ξ ,η) := η −T nBT−nξ
and Ξ+ :=
(ξ ,η) ∈ Ω∗r
∣∣∣∣δ〈x〉λ−1 (ξ ,η)≥ 0
, Ξ− :=
(ξ ,η) ∈ Ω∗r
∣∣∣∣δ〈x〉λ−1 (ξ ,η) < 0
.
Proposition 2. The first return time r for the geodesic γ (ξ ,η) is given by the function
r (ξ ,η) = lngA (ξ ,η)− lngn(ξ )
(FK (ξ )
q γ (ξ ,η))
+2lnFγ (ξ ,η) for ξ > 0,
respectively
r (ξ ,η) = r (−ξ ,−η) , forξ < 0.
Thereby
A = A(ξ ,η) =
−1, −R ≤ η <−λ
2 , ξ >−B(−η) ,0, −R ≤ η <−λ
2 , ξ <−B(−η) , or− λ
2 ≤ η <−r, ξ ≥ B(η) ,2, 3
4λ − 1λ
< η <−r, 3λ
2 < ξ < B(η) < λ +1,
3, λ −1 < η <−r, λ +1 < ξ < B(η) ,
K (ξ ) and n(ξ ) are defined as in Definition 17, whereas the functions g j (ξ ,η) = g(z j,γ
)for z j ∈ L j are given as in Corollary 7 and F (γ) is given as in Lemma 40.

42 D. MAYER AND F. STRÖMBERG
Proof. Consider γ = γ (ξ ,η) ∈ ϒr with ξ > 0 and suppose that Pγ = z0 ∈ Σ and T z0 =z1 ∈ Σ with w ∈ γ corresponding to z1. Since geodesics are parametrized by arc length thefirst return time is simply the hyperbolic length between z0 and w, i.e.
r (ξ ,η) = d (z0,w) = lng(z0,γ)− lng(w,γ) = lng(z0,γ)− lng(z1, Fqγ
)+2lnF (γ)
by Lemma 40. If z0 ∈ L j, we set g(z0,γ) = g j (ξ ,η) as given in Corollary 7. By Corollary8 it is easy to verify, that the sets in the definition of A(ξ ,η) correspond exactly to the casesz0 ∈ L−1,L0,L2 and L3 respectively, where the last set is empty for even q. It is also easyto see, that B
(34λ − 1
λ
)= 3λ
2 and B(λ −1) = λ +1. The statement of the Proposition nowfollows from the explicit formula for F (γ) in Lemma 40 and the domains in Proposition1 for which T = Fk
q . That r (−ξ ,−η) = r (ξ ,η) follows from the invariance of the cross-section with respect to reflection in the imaginary axis.
5. CONSTRUCTION OF AN INVARIANT MEASURE
By Liouvilles theorem we know that the geodesic flow on T 1H preserves the measureinduced by the hyperbolic metric. This measure, the Liouville measure, is given by dm =y−2dxdydθ in the coordinates (x+ iy,θ) ∈ H × S1 on T 1H . Using the coordinates(ξ ,η ,s) ∈ R3 given by Corollary 5 we obtain the Liouville measure in these coordinates
dm =dxdydθ
y2 =∣∣∣∣ ∂ (x,y,θ)∂ (ξ ,η ,s)
∣∣∣∣ 2r2 cos2 θ
dξ dηds =2dξ dηds
(η −ξ )2 .
The time discretization of the geodesic flow on T 1M in terms of the cross-section Σ andthe first return map T : Σ→ Σ thus preserves the measure dm′ = 2dξ dη
(η−ξ )2 on Ωr. We prefer
to work with the finite domain Ω∞r ⊆Ω∞. Hence the measure dµ (u,v) = dm′ (ξ ,η) given
by
dµ =2dudv
(1−uv)2
on Ω∞r is invariant under T (u,v) = Fq
K (u) (u,v) = ( f1 (u) , f2 (v)) where f1 (u) = FK (u)q u
= Au and f2 (v) = A−1v. Because dµ is equivalent to Lebesgue measure, we deduce thatdµ is in fact an FK (u)
q invariant measure on Ωr. If πx (x,y)= x it is clear that πxT (u,v)=f1 (u) = f1 πx (u,v) so f1 is a factor map of T . An invariant measure µ of f1 : Iq → Iq canbe obtained by integrating dµ in the v-direction. We get different alternatives dependingon q being even or odd.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 43
5.1. q = 3
In this case FKq = Fq and if we set U1 =
[−1
2 ,0]
= −U−1 and V1 = [r,R] then dµ =χU1dµ1 + χU−1dµ−1 where
dµ1 (u) =∫ R
r
2dudv
(1−uv)2 =[
1u(1−uv)
]v=R
v=rdu
=1
u(1−uR)− 1
u(1−ur)du =
1−ur−1+uRu(1−uR)(1−ur)
du
=1
(1−uR)(1−ur)du
and dµ−1 (u) =−dµ1 (−u) = 1(1+uR)(1+ur)du. Here r =
√5−32 and R = r +1 =
√5−12 .
5.2. Even q ≥ 4
Here U1 =[−λ
2 ,− 23λ
], U2 =
[− 2
3λ,0], V1 = [0,R] and V2 = [r,R]. Hence
dµ1
du(u) =
∫ R
0
2dv
(1−uv)2 =1
u(1−uR)− 1
u=
R1−uR
,
dµ2
du(u) =
∫ R
r
2dv
(1−uv)2 =1
u(1−uR)− 1
u(1−ur)
=R− r
(1−uR)(1−ur)=
λ
(1−uR)(1−ur),
dµ− j
du(u) =
dµ j
du(−u)
and the invariant measure µ of FKq for even q is given by
dµ (u) =3
∑j=−3
χU j (u)dµ j (u)
where χI j is the characteristic function for the interval U j. This measure is piece-wise dif-ferentiable and finite. The finiteness is clear since uR and ur 6= 1 for u∈ Iq. If
∫Iq
dµ (u) = c
then 1c dµ is a probability measure on Iq.

44 D. MAYER AND F. STRÖMBERG
5.3. Odd q ≥ 5
Let U1 =[−λ
2 , −23λ
], U2 =
[− 2
3λ,− 1
2λ
], U3 =
[− 1
2λ,0], V1 = [0,R] , V2 = [rκ−1,R] and
V3 = [r,R]. Then
dµ1
du(u) =
∫ R
0
2dv
(1−uv)2 =1
u(1−uR)− 1
u=
R1−uR
,
dµ2
du(u) =
∫ R
rκ−1
2dv
(1−uv)2 =1
u(1−uR)− 1
u(1−urκ−1)
=R− rκ−1
(1−uR)(1−urκ−1),
dµ3
du(u) =
R− r(1−uR)(1−ur)
=λ
(1−uR)(1−ur),
dµ− j
du(u) =
dµ j
du(−u)
and the invariant measure µ of FKq for odd q is given by
dµ (u) =3
∑j=−3
χU j (u)dµ j (u)
where χI j is the characteristic function for the interval U j. This measure is piece-wisedifferentiable and finite. The finiteness is clear since uR, ur and urκ−1 6= 1 for u ∈ Iq. If∫
Iqdµ (u) = c then 1
c dµ is a probability measure on Iq.
Remark 16. The geodesic flow on finite surfaces of constant negative curvature has beenshown by Ornstein and Weiss [39] to be Bernoulli with respect to Liouville measure. Sinceour cross section is smooth also the Poincaré map T is Bernoulli [38] with respect to theinduced measure dµ . But the factor map of a Bernoulli system is again Bernoulli [37].Hence also the map f1 : Iq → Iq is Bernoulli with respect to the measure µ .
Remark 17. For another approach leading to an infinite invariant measure see e.g. Haasand Gröchenig [14].
5.4. Invariant measure for Fq
It is easy to verify that dm(ξ ,η) = 2dξ dη
(ξ−η)2 is invariant under Möbius transformations, i.e.
if A ∈ PSL2(R) then dm(Aξ ,Aη) = dm(ξ ,η). By considering the action of Fq on Ω∗, i.e.
F Sq (ξ ,η) = S Fq S (ξ ,η) =
(SFqSξ ,
1nλ −η
)=(ST−n
ξ ,ST−nη)

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 45
it is clear that dm is invariant under F Sq : Ω∗ → Ω∗ and letting u = Sξ and v = −η it
is easy to verify that dµ (u,v) = 2dudv(1−uv)2 is invariant under Fq : Ω → Ω. We can thus
obtain corresponding invariant measure dµ for Fq by projecting on the first variable. Letdµ (u) = dµ j (u) for u ∈I j. Then
dµ j
du(u) = 2
∫ R
r j
dv
(1−uv)2
= 2[
1u(1−uv)
]R
r j
=2u
[1
1−Ru− 1
1− r ju
]=
2(R− r j
)(1−Ru)
(1− r ju
)and the invariant measure µ of Fq is given by
dµ (u) =κ
∑j=−κ
χI j (u)dµ j (u)
where χI j is the characteristic function for the interval I j. This measure is piece-wisedifferentiable and finite. If c =
∫Iq
dµ then 1c dµ is a probability measure on Iq. It turns
out that c = 14C where C−1 = ln
(1+cos π
qsin π
q
)for even q and C−1 = ln(1+R) for odd q (see
Lemma 3.2 and 3.4 in [8]).
6. LEMMAS ON CONTINUED FRACTION EXPANSIONS AND REDUCED GEODESICS
This section contains a collection of rather technical lemmas necessary to show that thefirst return map on Σ in Lemma 39 is given by powers of Fq.
Lemma 42. If γ ∈ ϒ with 〈γ+〉λ = a0 intersects T a0−1L0 then
γ+ =
[a0;(1h−1,2
)l,1h,a(l+1)h+1, . . .
]for some 0 ≤ l ≤ ∞, a(l+1)h+1 ≤−1, if q is even[
a0;1h,ah+1, . . .], with ah+1 ≥ 2, if q is odd.
Proof. Let x = γ+ − a0λ . By convexity γ does not intersect T a0−1L0 more than once.Hence x∈
(−λ
2 ,1−λ
]. If q is odd, then cq (1) =
[1;1h] and cq
(−λ
2
)=[1h,2,1h] accord-
ing to Lemmas 2 and 1 hence[1h,2,1h]< cq (x) <
[1h] and by the lexicographic ordering
(see proof of Lemma 13) it is clear, that cq (x) =[1h,ah+1, . . .
]with ah+1 ≥ 2. If q is even
then cq
(−λ
2
)=[1h] and 1−λ = r with cq (r) =
[1h−1,2
]so that
[1h]< cq (x)≤
[1h−1,2
].
By the lexicographic ordering it is clear, that cq (x) =[(
1h−1,2)l
,1h,a(l+1)h+1, . . .]
forsome l ≥ 0 (l = ∞ is allowed) and a(l+1)h+1 ≤−1 if l < ∞.

46 D. MAYER AND F. STRÖMBERG
Lemma 43. Let γ ∈ ϒ with 〈γ+〉λ = a0. Then T−sign(a0)nγ /∈ ϒ for n ≥ 1.
Proof. Without loss of generality assume a0 ≥ 1 and let γn = T−nγ for n ≥ 1. Then γn+ =
γ++nλ > γ+ and γn− = γ−+nλ . Since γ ∈ ϒ γ−≥−R⇒ γn
−≥ nλ −R =−r+(n−1)λ ≥−r. Hence γn
− /∈ [−R,−r) so γn /∈ ϒ. The case of a0 ≤−1 is analogous.
Lemma 44. If γ ∈ ϒ then γn = ST−nγ ∈ ϒ if and only if n = a0 = 〈γ+〉λ .
Proof. By definition, if γn ∈ϒ then Sγn+ = γ+−nλ ∈ I∞
q and hence γ+ ∈(
nλ − λ
2 ,nλ + λ
2
)⇒ n = a0. It is also clear that γa0 = Fqγ ∈ ϒ.
Lemma 45. Suppose that q is even. If γ = γ (ξ ,η) ∈ ϒ with a0 = 〈γ+〉λ ≥ 2 intersectsT a0−1L0 then the first return map is given as T (ξ ,η) = Fq
K (ξ ) (ξ ,η) ∈ P−1(
Σn(ξ ))
where K (ξ ) and n(ξ ) are as in Definition 17.
Proof. Consider Figures 6 and 8 showing the arcs around the point ρ . The picture issymmetric with respect to ℜz = λ
2 and invariant under translation, so it applies in thepresent case. After passing through T a0−1L0 the geodesic γ will intersect a sequence oftranslates of the arcs χ j and ω j which are the reflections of χ j and ω j in ℜz = λ
2 exactly asin Lemma 38, except that it now passes through every arc. Note, even the argument whyγ intersects ω j and not its extension applies. Let wn and An be as in Definition 14 exceptthat now w0 ∈ T a0−1L0.
Then w2 j ∈ T a0−1ω j = T a0−1 (ST−1) j SL0, for 0 ≤ j ≤ h and also w2 j+1 ∈ T a0−1χ j =(ST−1) j+1 L1, for 0 ≤ j ≤ h with corresponding maps A2 j+1 = (T S) j+1 T 1−a0 and A2 j =
(ST ) j ST 1−a0 . Set γk := Akγ and ξk := Akξ for 0≤ k ≤ 2h+1. There are three cases whenthe point wk can define a return to Σ:
a) if γ2 j+1 ∈ ϒr and z = Pγ2 j+1 ∈ Σ1,
b) if γ2 j−1 /∈ ϒr but γ ′2 j−1 = T Sγ2 j−1 ∈ ϒr with ξ ′2 j−1 ∈(
3λ
2 ,λ +1)
and z =
Pγ ′2 j−1 ∈ Σ2, orc) ifγ2 j ∈ ϒr and z = Pγ2 j ∈ Σ0.
According to Lemma 42 we get T a0−1ξ ∈(
λ
2 ,1]
and cq (ξ ) =[a0;1h−1,ah,ah+1, . . .
]with
ah = 2 or ah = 1 and ah+1 ≤−1. Also λ
2 =[(−1)h] and 1 = R =
[(−1)h ,−2,(−1)h−1]∗.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 47
Hence ξ2 j+1 ∈(−φ j+1,−rh− j
]⊆ Iq ⇒ γ2 j+1 /∈ ϒ for 1 ≤ j ≤ h−1 (cf. Remark 9). Also
note, that A2h+1 =(T S)h+1 T 1−a0 =(ST−1)h ST−a0, therefore γ2h+1 = A2h+1γ = ST−1Fq
hγ
and hence γ2h+1 /∈ ϒ unless ah = 1 in which case γ2h+1 = Fqh+1γ ∈ ϒr and Pγ2h+1 ∈ Σ1.
For γ ′2 j+1 = T Sγ2 j+1 = γ2 j+3 we conclude γ ′2 j+1 /∈ ϒ for 0 ≤ j ≤ h− 2. For ah = 1 wefind γ ′2h−1 = γ2h+1 ∈ ϒr, but ξ ′2h−1 < 0 and hence we do not get a point of Σ2. If ah = 2on the other hand then γ ′2h−1 /∈ ϒr but γ ′2h+1 = T Sγ2h+1 = Fq
hγ ∈ ϒr and ξ ′2h+1 > 3λ
2 soPγ ′2h+1 ∈ Σ2.
For γ2 j = Sγ2 j−1 we get ξ2 j ∈ S(−φ j,−rh+1− j
)=(−λ −φ j+1,−λ − rh− j
)and therefore
−3λ
2 < ξ2 j <−λ
2 for 0≤ j≤ h−1. Since T 1−a0η <−R we have η2 j ∈ S (T S) j (−∞,−R)=(φh− j,r j
)that is η2 j < 0. Hence γ2 j /∈ ϒr for 0 ≤ j ≤ h− 1. Note, that Fh
q ξ > 2λ
im-
plies that ξ2h = T−1ST−1Fhq ξ ∈ T−1ST−1 ( 2
λ,∞)
=(−λ ,−λ + λ
λ 2−2
)for q > 4 and
ξ2h ∈ (−∞,−λ ) for q = 4. In any case ξ2h < 0 and since η2h < r it is clear, that γ2h /∈ ϒ.
We conclude that the first return is given by w2h+1 and T (ξ ,η)= Fh+1q (ξ ,η)∈ P−1 (Σ1)
if ah = 1 and T (ξ ,η) = Fhq (ξ ,η) ∈ P−1 (Σ2) if ah = 2. This can be written in the form
T = FK (ξ )q ∈ P−1
(Σn(ξ )
)with K (ξ ) and n(ξ ) as in Definition 17.
Lemma 46. For q even consider ξ ∈(−λ
2 ,1−λ
)with cq (ξ ) =
[0;1h−1,ah,ah+1, . . .
].
Then ah = 1 if and only if ξ < −λ 3
λ 2+4 =−λ + 4λ
λ 2+4 .
Proof. By Lemma 42 we know either ah = 1 and ah+1 ≤ −1 or ah = 2. It is clear thatthe boundary point between these two cases is given by ξ0 =
[0;1h,(−1)h]= (ST )h
(λ
2
).
Using (2) one can show that ξ0 = (ST )h(
λ
2
)= (λ 2−2) λ
2 +λ
−λλ
2−2= −λ 3
4+λ 2 .
The following corollary is easy to verify by estimating the intersection of γ(−r,(a0− 1
2
)λ)
and T a0−1L0. It implies that the case T = Fhq does not occur for ξ
λ≥ 3.
Corollary 9. Let q be even and suppose that γ = γ (ξ ,η) ∈ ϒ with a0 = ξλ≥ 3. If γ
intersects T a0−1L0 then cq (ξ ) =[a0;1h,ah+1, . . .
]with ah+1 ≤−1.
Lemma 47. Let q be odd and suppose that γ ∈ ϒ. Let l be the geodesic arc [ρ +λ ,1+λ ],i.e. the continuation of L3. Then γ does not intersect ±l outwards (i.e. in the directionfrom 0 to ±∞).
Proof. Take γ = γ (ξ ,η) ∈ ϒ and assume ξ > 0. Suppose that γ intersects l in the out-wards direction. Since γ can not intersect the geodesic T SL−1 =
[λ ,λ + 2
λ
]more than

48 D. MAYER AND F. STRÖMBERG
once we have ξ ∈(λ +1,λ + 2
λ
)and because γ ∈ ϒ we have −R ≤ η < −r. If w(ξ ,η)
is the intersection between γ and the line T L1 = 3λ
2 + iR+ then ℑw(ξ ,η) > ℑw(ξ ,−r)≥ℑw(λ +1,−r). To show that ℑw > ℑT ρ = ℑρ = sin π
q it is enough to bound ℑw(λ +1,−r)from below. By Lemma 6 we have
ℑw(λ +1,−r)2 =(
λ +1− 3λ
2
)(3λ
2− r)
=(
1− λ
2
)(5λ
2−R)
=(
1− λ
2
)(1+
λ
2+(2λ −R−1)
)= sin2 π
q+(
1− λ
2
)(2λ −R−1) > sin2 π
q
since 2λ > R+1 and 1− λ
2 > 0. Hence ℑw(ξ ,η) > sin π
q and γ does not intersect l in thedirection from 0 to ∞. An analogous argument for ξ < 0 concludes the Lemma.
Lemma 48. For q odd, let γ = γ (ξ ,η)∈ ϒr be reduced with a0 = ξλ≥ 2. If γ intersects
T a0−1L0 then T (ξ ,η) = Fh+1q (ξ ,η) ∈ P−1 (Σ3).
Proof. Consider once more Figure 6 showing the arcs around ρ . Analogous to the proof ofLemma 45 we have w2 j ∈ T a0−1ω j = T a0−1 (ST−1) j SL0, for 0 ≤ j ≤ h + 1 and w2 j+1 ∈T a0−1χ j = T a0−1 (ST−1) j+1 L1, for 0 ≤ j ≤ h with the corresponding maps A2 j+1 =(T S) j+1 T 1−a0 and A2 j = (ST ) j ST 1−a0 . Set γ j := A jγ and ξ j := A jξ . There are nowfour possibilities to produce a return to Σ:
a) if γ2 j+1 ∈ ϒr and z = Pγ2 j+1 ∈ Σ1,b) if γ2 j−1 /∈ ϒ but T Sγ2 j+1 ∈ ϒr and z = PT Sγ2 j+1 ∈ Σ2,c) if γ2 j ∈ ϒr and z = Pγ2 j ∈ Σ0,d) if γ2 j /∈ ϒ but T±1γ2 j ∈ ϒr and z = Pγ2 j ∈ Σ±3.
We will see that most of these cases do not give a return. Since T 1−a0ξ ∈(
λ
2 ,1)
Lemma
42 shows that cq (ξ ) =[a0;1h,ah+1, . . .
]with ah+1 ≥ 2. Suppose also, that c∗q (η) =[
0;b1,b2, . . .]∗. For the following arguments it is important to remember that the action of
T S on ∂H ∼= R∗ ∼= S1 is monotone as a rotation around ρ .
Since γ2 j+1 = (T S) j+1 T 1−a0γ we have ξ2 j+1 ∈ (T S) j+1(
λ
2 ,1)
=(−φ2 j+2,−φ2 j+1
)⊆ Iq
and hence γ2 j+1 /∈ ϒ for 0≤ j ≤ h−1. Furthermore ξ2h+1 ∈ T S (−φ2h,−φ2h+1) = (−1,0)and therefore |ξ2h+1|< 2
λso that also γ2h+1 /∈ ϒ.

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 49
If γ ′2 j+1 = T Sγ2 j+1 = γ2 j+3 then γ ′2 j+1 /∈ ϒ for 1 ≤ j ≤ h− 1 and since we have A2h+3 =
(T S)h+2 T 1−a0 =(ST−1)h ST−a0 it is clear that γ2h+3 = A2h+3γ = Fh+1
q γ ∈ϒr and we havea return at w2h+1 with z1 ∈ L2!
Since γ2 j = (ST ) j ST 1−a0γ obviously ξ2 j ∈ S (T S) j(
λ
2 ,1)
=(S(−φ2 j
),S(−φ2 j−1
))=
−λ −(φ2 j+2,φ2 j+1
)and hence −3λ
2 < ξ2 j <−λ
2 . But T 1−a0η <−r−λ =−R and henceη2 j ∈ (ST ) j S (−∞,−R) =
(φ2(h− j)+1,r2 j+1
)for 0 ≤ j ≤ h (cf. Remark 10) respectively
η2h+2 ∈ ST (φ1,r2h+1) = ST (1−λ ,r) = S (1,R) = (−1,−1/R) and therefore η2 j < 0 andγ2 j /∈ ϒr for 0 ≤ j ≤ h+1.
Finally, since T−1η2 j < r2 j+1 − λ < −R and T ξ2 j ∈ Iq it is clear that T±1γ2 j /∈ ϒ for0 ≤ j ≤ h+1.
Acknowledgement. The authors appreciate also the many helpful discussions with TobiasMühlenbruch on different aspects of this paper.
REFERENCES
[1] R. L. Adler and L. Flatto. Cross section maps for geodesic flows. I. The modular surface. In Ergodictheory and dynamical systems, II (College Park, Md., 1979/1980), volume 21 of Progr. Math., pages103–161. Birkhäuser Boston, Mass., 1982. 2, 5
[2] R. L. Adler and L. Flatto. The backward continued fraction map and geodesic flow. Ergodic TheoryDynam. Systems, 4(4):487–492, 1984. 2
[3] R. L. Adler and L. Flatto. Cross section map for the geodesic flow on the modular surface. In Confer-ence in modern analysis and probability (New Haven, Conn., 1982), volume 26 of Contemp. Math.,pages 9–24. Amer. Math. Soc., Providence, RI, 1984. 2
[4] R. L. Adler and L. Flatto. Geodesic flows, interval maps, and symbolic dynamics. Bull. Amer. Math.Soc. (N.S.), 25(2):229–334, 1991. 2, 5, 19, 20
[5] E. Artin. Ein mechanisches System mit quasiergodischen Bahnen. Hamb. Math. Abh., 3:170–177,1924. 2
[6] D. Birkhoff. Quelques théorèmes sur le mouvement des systèmes dynamiques. Bull. Soc. Math. France,40:305–323, 1912. 2
[7] R. Bowen and C. Series. Markov maps associated with Fuchsian groups. Inst. Hautes Études Sci. Publ.Math., (50):153–170, 1979. 2
[8] R. M. Burton, C. Kraaikamp, and T. A. Schmidt. Natural extensions for the Rosen fractions. Trans.Amer. Math. Soc., 352(3):1277–1298, 2000. 5, 6, 9, 17, 22, 45
[9] Paula Cohen and J. Wolfart. Modular embeddings for some nonarithmetic Fuchsian groups. Acta Arith.,56(2):93–110, 1990. 4

50 D. MAYER AND F. STRÖMBERG
[10] K. Dajani, C. Kraaikamp, and W. Steiner. Metrical theory for α-Rosen fractions.Arxiv:math.NT/0702516v1, Feb 2007. 19
[11] M. Einsiedler and T. Ward. Ergodic theory: with a view towards number theory. In preparation. 4[12] D. Fried. Symbolic dynamics for triangle groups. Invent. Math., 125(3):487–521, 1996. 2[13] D. Fried. Reduction theory over quadratic imaginary fields. J. Number Theory, 110(1):44–74, 2005. 6[14] K. Gröchenig and A. Haas. Backward continued fractions, Hecke groups and invariant measures for
transformations of the interval. Ergodic Theory Dynam. Systems, 16(6):1241–1274, 1996. 28, 44[15] J. Hadamard. Les surfaces à courbures opposées et leurs lignes géodésiques. J. Math. Pures et Appl.,
5(4):27–73, 1898. 2[16] G. A. Hedlund. On the measure of the non-special geodesics on a surface constant negative curvature.
Proc. Natl. Acad. Sci. USA, 19:345–348, 1933. 2[17] G. A. Hedlund. On the metrical transitivity of the geodesics on closed surfaces of constant negative
curvature. Ann. of Math. (2), 35(4):787–808, 1934. 2[18] G. A. Hedlund. Two-dimensional manifolds and transitivity. Ann. of Math. (2), 37(3):534–542, 1936.
2[19] G. A. Hedlund. Fuchsian groups and mixtures. Ann. of Math. (2), 40(2):370–383, 1939. 2[20] E. Hopf. Fuchsian groups and ergodic theory. Trans. Amer. Math. Soc., 39(2):299–314, 1936. 2[21] E. Hopf. Statistik der geodätischen Linien in Mannigfaltigkeiten negativer Krümmung. Ber. Verh.
Sächs. Akad. Wiss. Leipzig, 91:261–304, 1939. 2[22] A. Hurwitz. über eine besondere Art der Kettenbruch-Entwickelung reeller Grössen. Acta Math.,
12:367–405, 1889. 6, 15, 24[23] S. Katok. Fuchsian Groups. The University of Chicago Press, 1992. 3, 4[24] S. Katok and I. Ugarcovici. Arithmetic coding of geodesics on the modular surface via continued
fractions. In European women in mathematics—Marseille 2003, volume 135 of CWI Tract, pages 59–77. Centrum Wisk. Inform., Amsterdam, 2005. 2, 6, 27, 28
[25] S. Katok and I. Ugarcovici. Symbolic dynamics for the modular surface and beyond. Bull. Amer. Math.Soc. (N.S.), 44(1):87–132 (electronic), 2007. 2, 6, 15, 23, 24, 26, 28
[26] P. Koebe. Riemannsche mannigfaltigkeiten und nichteuklidische raumformen. iv: Verlauf geodätischerlinien. Sitzungsberichte Akad. Berlin, 1929:414–457, 1929. 2
[27] J. Lehner. Discontinuous groups and automorphic functions. Mathematical Surveys, No. VIII. Ameri-can Mathematical Society, Providence, R.I., 1964. 3, 4
[28] D. Lind and B. Marcus. An introduction to symbolic dynamics and coding. Cambridge University Press,Cambridge, 1995. 19
[29] F. Löbell. Über die geodätischen Linien der Clifford-Kleinschen Flächen. Math. Z., 30(1):572–607,1929. 2
[30] G. A. Morse, M. Hedlund. Symbolic Dynamics. Amer. J. Math., 60(4):815–866, 1938. 2[31] H. M. Morse. A One-to-One Representation of Geodesics on a Surface of Negative Curvature. Amer.
J. Math., 43(1):33–51, 1921. 2[32] H. M. Morse. Recurrent geodesics on a surface of negative curvature. Trans. Amer. Math. Soc.,
22(1):84–100, 1921. 2[33] P. J. Myrberg. Ein Approximationssatz für die Fuchsschen Gruppen. Acta Math., 57(1):389–409, 1931.
2[34] H. Nakada. Metrical theory for a class of continued fraction transformations and their natural exten-
sions. Tokyo J. Math., 4(2):399–426, 1981. 19[35] H. Nakada. Continued fractions, geodesic flows and Ford circles. In Algorithms, fractals, and dynamics
(Okayama/Kyoto, 1992), pages 179–191. Plenum, New York, 1995. 6, 22

SYMBOLIC DYNAMICS FOR THE GEODESIC FLOW ON HECKE SURFACES 2008–8–26 51
[36] J. Nielsen. Om geodætiske linier i lukkede mangfoldigheder med konstant negativ krumning. Mat.Tidsskrift B, 1925:37–44, 1925. 2
[37] D. Ornstein. Ornstein theory. Scholarpedia, 2008. 3(3):3957. 44[38] D. Ornstein and B. Weiss. On the Bernoulli nature of systems with some hyperbolic structure. Ergodic
Theory Dynam. Systems, 18(2):441–456, 1998. 44[39] D. S. Ornstein and B. Weiss. Geodesic flows are Bernoullian. Israel J. Math., 14:184–198, 1973. 44[40] H. Poincaré. Mémoire sur les courbes définies par une équation differentielle. J. Math. Pures Appl.,
3(8):251–296, 1882. Ch. V-IX. 5[41] J. G. Ratcliffe. Foundations of Hyperbolic Manifolds. Springer-Verlag, 1994. 3[42] D. Rosen. A class of continued fractions associated with certain properly discontinuous groups. Duke
Math. J., 21:549–563, 1954. 5, 9[43] D. Rosen and T. A. Schmidt. Hecke groups and continued fractions. Bull. Austral. Math. Soc.,
46(3):459–474, 1992. 5[44] D. Rosen and C. Towse. Continued fraction representations of units associated with certain Hecke
groups. Arch. Math. (Basel), 77(4):294–302, 2001. 5[45] T. A. Schmidt. Remarks on the Rosen λ -continued fractions. In Number theory with an emphasis on
the Markoff spectrum (Provo, UT, 1991), volume 147 of Lecture Notes in Pure and Appl. Math., pages227–238. Dekker, New York, 1993. 5
[46] P. Schmutz Schaller and J. Wolfart. Semi-arithmetic Fuchsian groups and modular embeddings. J.London Math. Soc. (2), 61(1):13–24, 2000. 4
[47] C. Series. Symbolic dynamics for geodesic flows. Acta Math., 146(1-2):103–128, 1981. 2, 19[48] C. Series. The modular surface and continued fractions. J. London Math. Soc. (2), 31(1):69–80, 1985.
2
INSTITUT FÜR THEOR. PHYSIK, TU CLAUSTHAL, ABT. STATISTISCHE PHYSIK UND NICHTLINEAREDYNAMIK, ARNOLD SOMMERFELD STRASSE 6, 38678 CLAUSTHAL-ZELLERFELD, GERMANY
E-mail address: [email protected]
INSTITUT FÜR THEOR. PHYSIK, TU CLAUSTHAL, ABT. STATISTISCHE PHYSIK UND NICHTLINEAREDYNAMIK, ARNOLD SOMMERFELD STRASSE 6, 38678 CLAUSTHAL-ZELLERFELD, GERMANY
E-mail address: [email protected]