Study of helical induced anisotropy in amorphous ribbons for sensor applications
4
Click here to load reader
-
Upload
alfonso-garcia -
Category
Documents
-
view
216 -
download
0
Transcript of Study of helical induced anisotropy in amorphous ribbons for sensor applications

© 2011 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
p s scurrent topics in solid state physics
c
sta
tus
so
lid
i
www.pss-c.comph
ysic
aPhys. Status Solidi C 8, No. 11–12, 3171–3174 (2011) / DOI 10.1002/pssc.201000710
Study of helical induced anisotropy in amorphous ribbons for sensor applications Alfonso García*,1, Fernando Maganto1, Enrique Tremps1, Puerto Ramírez2, and Carlos Morón**,1 1 Departamento Tecnología de la Edificación, E. U. Arquitectura Técnica, Universidad Politécnica de Madrid,
Avda. Juan de Herrera 6, 28040 Madrid, Spain 2 Departamento S. I. A., E. U. Informática Universidad Politécnica de Madrid, Ctra. de Valencia km 7, 28031 Madrid, Spain
Received 19 July 2010, revised 17 November 2010, accepted 20 November 2010 Published online 9 March 2011
Keywords helical anisotropy, sensor, amorphous magnetic ribbons ** Corresponding author: e-mail [email protected], Phone: +34 913 367 583, Fax: +34 913 367 637 ** e-mail [email protected], Phone: +34 913 367 583, Fax: +34 913 367 637
Amorphous samples with helical induced anisotropy show magnetization processes that can be controlled by applying a longitudinal magnetic field simultaneously with an alternating current flowing through the sample. By varying the current amplitude and the phase differ-ence between current and applied field, a wide range of coercivity and susceptibility values can be achieved.
This work shows that the apparent coercive field and the susceptibility can be controlled in amorphous ribbons with helical anisotropy. These characteristics make these samples very suitable for their application as sensor cores, magnetic amplifiers, variable reluctance transformer cores, etc.
© 2011 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
1 Introduction The magnetization processes of amorphous ferromag-
netic samples with non uniform anisotropy distribution have been widely studied. So, it has been reported that highly magnetostrictive amorphous wires show magnetiza-tion processes with large Barkhausen discontinuities [1-8]. In this particular magnetization process, the anisotropy dis-tribution plays an important role: the anisotropy is parallel to the wire axis direction in central zone and it is in the ra-dial direction in the zone close to surface. Amorphous rib-bons, stress annealed to induce easy axis at 45º and 315º with respect to the ribbon axis in each one of its faces, show peculiar hysteresis loops with large Wiedemann and Matteucci effects that are produced by the magnetization rotation at both surfaces [9, 10].
These magnetization processes in wires can be changed if a non uniform magnetic field, produced by a current flowing through the wire, is applied while it is magnetized by a longitudinal alternating field. So, in some of these mentioned works [7], the effect of an electrical current through the sample has been studied, observing a dis-
placement of one of the large Barkhausen discontinuities, that depend on the current intensity.
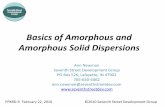
In previous works [8, 11] it has been reported that samples of METGLAS 2705 M, annealed by an electrical current of 780 mA for 15 minutes, show a non uniform an-isotropy distribution. These samples present an in-plane easy axis perpendicular to the ribbon axis in both surfaces of the sample which rotates continuously (180 degrees) from one surface of the sample to the other (Fig. 1 a). The easy axis is parallel to the ribbon axis in the central zone. Hysteresis loops of these samples show large Barkhausen discontinuities because during the magnetization process the chirality of anisotropy direction and the chirality of magnetization direction must be the same to minimize the system energy [8, 11]. Then, the only two possible mag-netization configurations for zero external applied mag-netic field are shown in Fig. 1(b,c).

3172 A. García et al.: Helical induced anisotropy in amorphous ribbons for sensor applications
© 2011 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim www.pss-c.com
ph
ysic
ap s sstat
us
solid
i c
(a)
(b)
(c)
Figure 1 a) Anisotropy distribution in the sample. b) and c) The two possible magnetization distributions with the same chirality as the anisotropy distribution for zero external applied magnetic field.
A change in the magnetization direction in the central
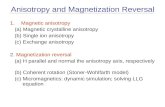
zone of the sample produces an inversion in the magnetiza-tion direction at both surfaces. This effect has been con-firmed experimentally by using the magneto optic Kerr ef-fect [8], measuring in the sample surface the magnetization perpendicular to the ribbon axis, while the sample is being magnetized by an alternating magnetic field in the ribbon axis direction [11]. The symmetry of this effect can be ob-served in Fig. 2, where the measured magnetization, paral-lel to the ribbon axis, is plotted vs. the current intensity flowing through the sample. The sample is magnetized by the magnetic field produced by the alternating sinusoidal current applied through the ribbon, so there is not any ap-plied longitudinal magnetic field and the measured longi-tudinal magnetization changes are only due to the inver-sion of magnetization direction in the central zone of the sample, induced by the inversion of magnetization at both surfaces of the ribbon.
In this work, we will show that the coupling between the magnetization in zones close to surfaces and the mag-netization in the inner zone of the sample, joined to the helical distribution of anisotropy direction, can be used to obtain very special hysteresis loops when the sample is magnetized by a helical magnetic field. This field is ob-tained by applying simultaneously a longitudinal alternat-ing field HL and the non uniform field HI produced by an alternating current flowing through the sample. This spe-cial and variable magnetic behaviour may be used to obtain magnetic sensor nucleus adapted to the measure to make.
-10 -5 0 5 10ELECTRICAL CURRENT (mA)
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
MAG
NET
IZAT
ION
(T)
Figure 2 Hysteresis loop obtained by plotting magnetization par-allel to ribbon axis vs. the current intensity through the ribbon.
2 Experimental and results Samples of METGLAS 2705 M (12 cm length, 1.2 mm
wide and 20 μm thick), annealed as mentioned above, were magnetized by a longitudinal alternating magnetic field HL produced by a Helmholtz coils system. A non-homogeneous magnetic field HI, produced by a current flowing through the ribbon is simultaneously applied to the sample. The field HI, perpendicular to the ribbon axis, is only dependent on the current intensity and on the distance to the longitudinal symmetry plane parallel to the ribbon surface. This field is almost zero in the inner zone of the sample and it is maximum and parallel to anisotropy direc-tion at both sample surfaces. The magnetization was meas-ured with a standard induction method.
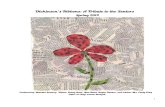
We have experimentally observed that the action of an alternating longitudinal field applied when a DC current is flowing through the sample, shifts the Barkhausen discon-tinuities toward the left or right, depending on the current direction. This effect is due to magnetization rotation at both surfaces is either impeded, or favoured, if the HI di-rection is the same, or opposed, as the magnetization at both sample surfaces (Fig. 3). Over 40 mA there is a satu-ration of this effect (Barkhausen discontinuities do not shift more to the left or to the right – depending on current direction – for currents over 40 mA).
The total applied field H= HL+HI is a helical field, as the anisotropy and magnetization directions. But the chiral-ity of this field depends on the HL and current direction. When HL and I has the same direction, H has negative chi-rality and positive in the other case. Fig 3 shows that the inversion of magnetization direction in the whole sample (central zone and surfaces zones) is delayed if the chirality of the applied field is opposite to the magnetization chiral-ity or activated when the chirality of the applied field and

Phys. Status Solidi C 8, No. 11–12 (2011) 3173
www.pss-c.com © 2011 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
Contributed
Article
magnetization direction have the same sign (the chirality sign of the induced anisotropy in this sample is negative).
-40 -30 -20 -10 0 10 20 30 40MAGNETIC FIELD (A/m)
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
MAG
NET
IZAT
ION
(T)
I= 0 mAI= 20 mAI= -20 mA
Figure 3 Effect of a DC current, flowing through the sample, on the hysteresis loops.
We have used this effect to obtain hysteresis loops with
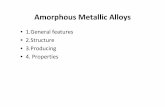
very different shapes, controlling at all times the chirality of the applied field. Figure 4 shows the hysteresis loops of a sample magnetized by a sinusoidal field of 10 Hz parallel to the ribbon axis, while a square wave current of the same frequency, but different phase, is flowing through the sam-ple (the difference of phase between the fields HL and HI - d.p.f. - was adjusted with a resolution of 0.35º). The coer-cive field is strongly dependent on the difference of phase, it is, at the moment in which the chirality of the total ap-plied field changes its sign. When the d.p.f. is zero, the co-ercive field and the magnetic losses are nearly zero, as can be seen in Fig 4a. Hysteresis loops with negative differen-tial susceptibility can be obtained for d.p.f. over 90º, (Fig. 4c). When d.p.f’s are over 180º and current intensity is over 40 mA, the hysteresis loops show negative coercive fields and even apparent negative hysteresis losses (Fig. 5). These phenomena can be explained by the strong coupling between the magnetization on the inner zone and on the outer zones. When the effect of the magnetic field HI on the sample predominates over the HL effect, it happen an inversion in the magnetization of the outer zones that forc-es the inversion of magnetization in the inner zone. The apparent negative hysteresis losses is explained by the en-ergy provided by the current.
Figure 4 Hysteresis loops of a sample obtained while a square wave current of 50 mA amplitude is flowing through the sample. Difference of phase between HL and HI, φ, a) 0º, b) 90º, c) 180º. The arrows show the way in which the loops were obtained.
Figure 5 Hysteresis loops of a sample obtained while a square wave current of a) I=24 mA, b) I=28 mA, c) I=30 mA amplitude is flowing through the sample, being the difference of phase be-tween HL and HI, φ = 270º. The arrows indicates the way in which the loops were obtained.

3174 A. García et al.: Helical induced anisotropy in amorphous ribbons for sensor applications
© 2011 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim www.pss-c.com
ph
ysic
ap s sstat
us
solid
i c
The effect of the current intensity and d.p.f. on the hys-teresis loops is summarized in Fig. 6, where the coercive field vs. d.p.f. is plotted for different current intensities. As can be seen, for electrical currents above 20 mA one ob-tains negative coercive fields (depending on the d.p.f.) and over a current of 40 mA, the current effect predominates over the longitudinal magnetic field effect and the coercive field, for longitudinal hysteresis loop, is only a function of the d.p.f.
0 50 100 150 200 250 300 350d.p.f. (degrees)
-20
-15
-10
-5
0
5
10
15
20
CO
ERC
IVE
FIEL
D (A
/m)
I= 0 mA
I= 10 mA
I= 20 mA
I= 30 mA
I= 40 mA
I= 50 mA
I= 60 mA
I= 70 mA
Figure 6 Coercive field vs. difference of phase between HL and HI, for different applied currents.
3 Conclusions We have shown in this work that, in amorphous rib-
bons that show helical anisotropy with the helix axis per-pendicular to the sample surface, the helix chirality plays a very important role in the magnetization processes, so that the shape of the hysteresis loops can be easily controlled by applying helical magnetic fields with adequate chirality.
This effect also opens a wide field in the development of different kinds of technical applications like: sensors, transformer cores of variable reluctance or a new kind of magnetic amplifiers.
So, the response of the same sample, used as sensor nucleus, may be selected to get the most suitable response in function as the effect to be measured (i.e. must be se-lected the better sensitivity or the better dynamic range de-pending on the interest of measurement to made). That must improve some actual sensors [12-14] or to open ways for new sensor development.
In this way a new investigation line is opened to get adaptive sensors in the field of electrical power sensor and magnetic flux-gate sensors.
Acknowledgements This work has been partially sup-ported by the Spanish CICYT, under project DPI2005-05373 and by the Universidad Politécnica de Madrid.
References [1] L. V. Panina, H. Katoh, and K. Mohri, IEEE Trans. Magn.
29, 2524 (1993). [2] C. Gómez-Polo, M. Vázquez, and D.-X. Chen Appl. Phys.
Lett. 62, 108 (1993). [3] K. Mohri, F. B. Humphrey, K. Kawashima, K. Kimura, and
M. Mizutani, IEEE Trans. Magn. 26, 1789 (1990). [4] J. González, J. M. Blanco, J. M. Barandiarán, M. Vázquez,
A. Hernando, G. Rivero, and D. Niarchos, IEEE Trans. Magn. 26, 1798 (1990).
[5] M. Wun-Fogle, J. B. Restorff, A. E. Clark, and H. T. Savage, J. Appl. Phys. 70, 6519 (1991).
[6] C. Gómez-Polo, T. Reininger, M. Vázquez, and H. Kron-müller, IEEE Trans. Magn. 29, 3481 (1993).
[7] J. L. Costa, Y. Makino, and K. V. Rao, IEEE Trans. Magn. 26, 1792 (1990).
[8] M. Rodríguez, C. Aroca, E. López, M. C. Sánchez, and P. Sánchez, J. Magn. Magn. Mater. 153, 141, (1996).
[9] K. Mohri and T. Shirosugi, IEEE Trans. Magn. MAG-19, 2151 (1983).
[10] K. Mohri, S. Takeuchi, and T. Fujimoto, IEEE Trans. Magn. MAG-17, 3370 (1981).
[11] M. Rodríguez, A. García, M. Maicas, C. Aroca, E. López, M. C. Sánchez, and P. Sánchez, J. Magn. Magn. Mater. 133, 36, (1994).
[12] G. D. Gray, P. A. Kohl, Sens. Actuators A, Phys. 119, 489, (2005).
[13] G. D. Gray, E. M. Prophet, L. Zhu, and P. A. Kohl, Sens. Actuators A, Phys. 119, 502, (2005).
[14] M. Campano, J. Boyd, and P. Hesketh, J. Microelectromech. Syst. 9, 181, (2000).